Embed Size (px)
Citation preview


「信号処理の基礎」
サンプルページ
この本の定価・判型などは,以下の URL からご覧いただけます.
http://www.morikita.co.jp/books/mid/081051
※このサンプルページの内容は,初版 1 刷発行時のものです.

情報工学レクチャーシリーズ ■ 編集委員
高橋 直久 名古屋工業大学大学院教授工学博士
松尾 啓志 名古屋工業大学大学院教授工学博士
和田 幸一 法政大学教授工学博士
五十音順

i
「情報工学レクチャーシリーズ」の序
本シリーズは,大学・短期大学・高専の学生や若い技術者を対象として,情報工学の基礎知識の理解と応用力を養うことを目的に企画したものである.情報工学における数理,ソフトウェア,ネットワーク,システムをカバーし,その科目は基本的な項目を中心に,つぎの内容を含んでいる.「情報数学,アルゴリズムとデータ構造,形式言語・オートマトン,信号処理,符号理論,コンピュータグラフィックス,プログラミング言語論,オペレーティングシステム,ソフトウェア工学,コンパイラ,論理回路,コンピュータアーキテクチャ入門,コンピュータアーキテクチャの設計と評価,ネットワーク技術の基礎,データベース,AI・知的システム,並列処理,分散処理システム」各巻の執筆にあたっては,情報工学の専門分野で活躍し,優れた教育経験をもつ先生方にお願いすることができた.本シリーズの特長は,情報工学における専門分野の体系をすべて網羅するのではなく,本当の知識として,後々まで役立つような本質的な内容に絞られていることである.加えて丁寧に解説することで内容を十分理解でき,かつ概念をつかめるように編集されている.情報工学の分野は進歩が目覚しく,単なる知識はすぐに陳腐化していく.しかし,本シリーズではしっかりとした概念を学ぶことに主眼をおいているので,長く教科書として役立つことであろう.内容はいずれも基礎的なものにとどめており,直感的な理解が可能となるように図やイラストを多用している.数学的記述の必要な箇所は必要最小限にとどめ,必要となる部分は式や記号の意味をわかりやすく説明するように工夫がなされている.また,新しい学習指導要領に準拠したレベルに合わせられるように配慮されており,できる限り他書を参考にする必要がない,自己完結型の教科書として構成されている.一方,よりレベルの高い方や勉学意欲のある学生のための事項も容易に参照できる構成となっていることも本シリーズの特長である.いずれの巻においても,半期の講義に対応するように章立ても工夫してある.以上,本シリーズは,最近の学生の学力低下を考慮し,できる限りやさしい記述を目指しているにもかかわらず,さまざまな工夫を取り込むことによって,情報工学の基礎を取りこぼすことなく,本質的な内容を理解できるように編集できたことを自負している.
高橋直久 松尾啓志和田幸一

ii
序 文
携帯型オーディオプレイヤーなどで使われる音楽のデータ圧縮,スマートフォンなどで使われる音声入力,映画館などで使われる立体音響,これらの実現にはディジタル信号処理が重要な役割を果たしている.これ以外にも近年の計算機の性能の飛躍的向上により,これまで机上の話や夢物語だったことが次々と実現されるようになってきており,ディジタル信号処理に対する必要性は今後ますます高まってくると予想される.信号処理を座学中心の講義で学ぶ場合,信号処理の方法や技術を習得するために必要な数学的理論の習得が中心となる.そのため,座学で信号処理をひととおり学んだとしても実際の信号に対して信号処理を行えるようにはならない.本来ならば,座学に加えパーソナルコンピュータなどを使った演習を合わせて行うのが望ましいが,なかなかそうもいかないのが現状である.理論中心とはいっても信号処理が数学と根本的に異なるのは,信号処理をするという明確な目的が存在することである.信号処理の目的は,大雑把に,信号を理解すること(解析),所望の性質をもつように信号を作ること(合成),あるいは与えられた信号を所望の性質をもつように加工すること(処理)であるが,本書では,このような目的をつねに意識できるように工夫した.信号に限らないことであるが,対象を理解するためには,対象を理解できる成分まで分解し,その成分量を知ることが基本となる.これが解析である.一方,必要な成分を必要な量だけ集めてきて足し合わせれば,所望の性質をもつ信号を作ることができる.これが合成である.本書で学ぶフーリエ級数,フーリエ変換,ラプラス変換,z 変換は,解析や合成を行うためのものであるが,成分となるものが異なる.信号を理解する,あるいは信号を合成するためには,漠然と変換式を記憶していても駄目で,それぞれで使う成分の意味を理解しておく必要がある.本書では,成分,成分量を強く意識し理解できるように工夫してある.また,逆フーリエ変換はフーリエ変換の逆変換という理解だけでは不足であり,フーリエ変換は成分量を求めるもの,逆フーリエ変換は信号を合成するためのものであるという目的の違いを理解することが必要である.変換/逆変換だけではなく,解析と合成という用途の違いを理解してほしい.最後に,信号を加工するものとして,システム,その特殊なものとしてフィルタがある.一般的には,システムに入ってきた信号の各成分に対してその量を加工するため,やはり成分に分解する考え方を理解しておく必要がある.大学の工学系学部の講義で信号処理を学ぶ場合,修得すべきこととして,フーリエ級数(2
章),フーリエ変換(3章),ラプラス変換(4章),システム(5章),システムの特別なものとしてフィルタ(6章)がまず挙げられる.その後,ディジタル化のための時刻の離散化である標本化(7章),離散フーリエ変換(7章),z変換(8章),離散時間システムとディジタルフィルタ(8章)を学ぶことになる.本書では,これらすべてについて学ぶことができるようにしてある.応用数学でフーリエ級数,フーリエ変換,ラプラス変換を学んでいる場合,これらを省略し,あるいは制御工学などでシステムを学んでいる場合,これを省略してもよい.し

序 文 iii
かし,フーリエ係数などを計算できるだけ,成分に分解して理解する考え方が身についていない場合には,このような立場から簡単に復習をしてほしい.また,信号を確率的に捉える確率過程は,雑音などが含まれる信号処理では必須であるが,本書では一切触れていない.もし,これらの知識が必要な場合には,関連する書籍を併用してほしい.パーソナルコンピュータでディジタル信号処理を行うことのできるソフトウェア,ツールは数多く出回っている.ただし,これらの解析ソフトウェアは,簡単に使えてしまうが,理論を知らなければ正しく使うことはできないし,結果を正しく解釈することもできない.理論を学ぶのは,何に役立つのか正直わかりづらく,好きになれないかもしれない.そこで,本書を利用して,成分に分解して信号を理解する,成分を集めてきて信号を合成する,成分量を変化させることにより信号を加工するといった目的意識をもって学んでみてほしい.このような理解は,観測された信号から,それが作り出された過程や,処理されてきた過程までをも直観的に読み取るセンスの獲得につながる.そして実力がつけば,市販の信号解析用のソフトウェアを駆使して,手品のように思いどおりの信号処理を行える日も近いだろう.
2013年 3月横田康成

iv
目 次
第 1章 信号,信号処理とは 1
1.1 信号とは ............................................................................................ 1
1.2 信号処理とは ...................................................................................... 2
第 2章 フーリエ級数 4
2.1 周期信号と非周期信号 .......................................................................... 4
2.2 三角級数 ............................................................................................ 4
2.3 最小 2乗法 ......................................................................................... 6
2.4 フーリエ級数 ...................................................................................... 7
2.5 三角級数,フーリエ級数の価値 .............................................................. 9
2.6 複素数と複素指数関数 .......................................................................... 9
2.7 複素形式のフーリエ級数 ...................................................................... 12
2.8 フーリエ級数の性質 ............................................................................ 15
2.9 フーリエ級数の例 ............................................................................... 17
演習問題 ................................................................................................... 21
第 3章 フーリエ変換 23
3.1 フーリエ級数からフーリエ変換へ .......................................................... 23
3.2 フーリエ変換の性質 ............................................................................ 27
3.3 フーリエ変換の例 ............................................................................... 35
演習問題 ................................................................................................... 40
第 4章 ラプラス変換 42
4.1 ラプラス変換 ..................................................................................... 42
4.2 ラプラス変換の性質 ............................................................................ 44
4.3 ラプラス変換の例 ............................................................................... 47
4.4 逆ラプラス変換 .................................................................................. 52
4.5 起点をもつ信号の成分 ......................................................................... 56
演習問題 ................................................................................................... 60
第 5章 システム 61
5.1 システム ........................................................................................... 61
5.2 システムの微分表記 ............................................................................ 66
5.3 伝達関数の解釈 .................................................................................. 69
5.4 周波数特性 ........................................................................................ 71

目 次 v
演習問題 ................................................................................................... 76
第 6章 フィルタ 77
6.1 周波数特性の表現法と解釈 ................................................................... 77
6.2 フィルタ ........................................................................................... 85
6.3 フィルタの代表的な型 ......................................................................... 87
6.4 LPFから HPF,BPF,BEFへの変換 .................................................. 90
演習問題 ................................................................................................... 93
第 7章 ディジタル化と離散フーリエ変換 94
7.1 標本化,量子化,ディジタル化 ............................................................. 94
7.2 標本化定理 ........................................................................................ 97
7.3 離散フーリエ変換 ............................................................................. 103
7.4 高速フーリエ変換アルゴリズム ........................................................... 108
演習問題 ................................................................................................. 111
第 8章 ディジタルフィルタ 113
8.1 z変換 ............................................................................................. 113
8.2 ディジタルフィルタ .......................................................................... 118
8.3 ディジタルフィルタの安定性,位相特性 ............................................... 123
8.4 ディジタルフィルタの設計 ................................................................. 125
8.5 線形予測 ......................................................................................... 130
演習問題 ................................................................................................. 135
さらなる勉強のために 136
演習問題解答 138
索 引 147


1
第 1 章
信号,信号処理とは
キーワード信号,信号処理,成分,分解,合成,加工,フィルタ
気温や株価など時刻によって変化する変量は,時刻を変数にもつ関数と考えることができる.このような時刻を変数にもつ関数を信号という.信号は,たとえば,気温が 24時間ごと,そして 1年ごとに似たような傾向を示すように,さまざまな性質をもつ.このような信号がもつ傾向や性質,特徴を調べることを信号処理という.本章では,まず信号と信号処理の基本的な考え方について説明する.
1.1 信号とは
気温や株価など,時刻によって変化する変量を信号という(図 1.1).このため,信号は時刻 tを変数にもつ関数とも考えられる.そこで,信号を x(t)で表す.時刻 tは実数であるから,すべての実数からなる集合をRで表すと,時刻 tの取りうる範囲を t ∈ Rと書くことができる.気温や株価などもまた実数をとるので,信号 x(t)の取りうる範囲は x(t) ∈Rとなる.ただし,複数の地点の気温をまとめて扱う場合,信号をベクトル x(t)とみなすこともできる.信号は複素数をとる場合もあるが,本書では,信号を実数に限定する.すなわち,時刻の定義域と合わせて,x(t) ∈R, t ∈Rとなる.
図 1.1 信号の例

2 第 1章 信号,信号処理とは
1.2 信号処理とは
たとえば,気温は 24時間ごと(図 1.2)に,そして 1年ごとに似たような傾向を示す.これを周期性という.つまり,気温は,24時間と 1年の周期性をもつ.さらには太陽の黒点増減に伴う 11年,氷河期・間氷期など数億年単位の周期性などもあるかもしれない.このように信号がもつ傾向や性質,特徴を調べたり,所望の性質をもつように信号を加工することを信号処理という.信号にかかわらず,一般に未知のものを理解するためには,私たちは,それらの構成成分に着目し,未知のものにそれらがどの程度含まれているかを調べることが多い.また,既知の性質をもつ構成成分を合成して新たなものを作り出すこともある.信号の加工では,信号の特定の構成成分のみを抽出,あるいは除去することが基本となる.これらの処理を順番に説明していこう.
図 1.2 24時間の周期性をもつ気温の変化
信号の分解 たとえば,目の前に薬とおぼしき粉末がある.いま,この粉末が何であるかを知りたいとする.このような場合,通常,私たちは分析器にかけて,○○が○mg,□□が□mg,△△が△mgなどと構成成分に分解してみる.構成成分が既知のものであれば,それらがどの程度含まれているかを知ることにより,この粉末が何であるかを推測できる.信号 x(t)の分析も同様である.信号が,g1(t), g2(t), . . . , gN (t)を構成成分とし,それらの成分量がそれぞれ c1, c2, . . . , cN であるとする.このとき,信号 x(t)は,
x(t) = c1g1(t) + c2g2(t) + · · ·+ cNgN (t) (1.1)
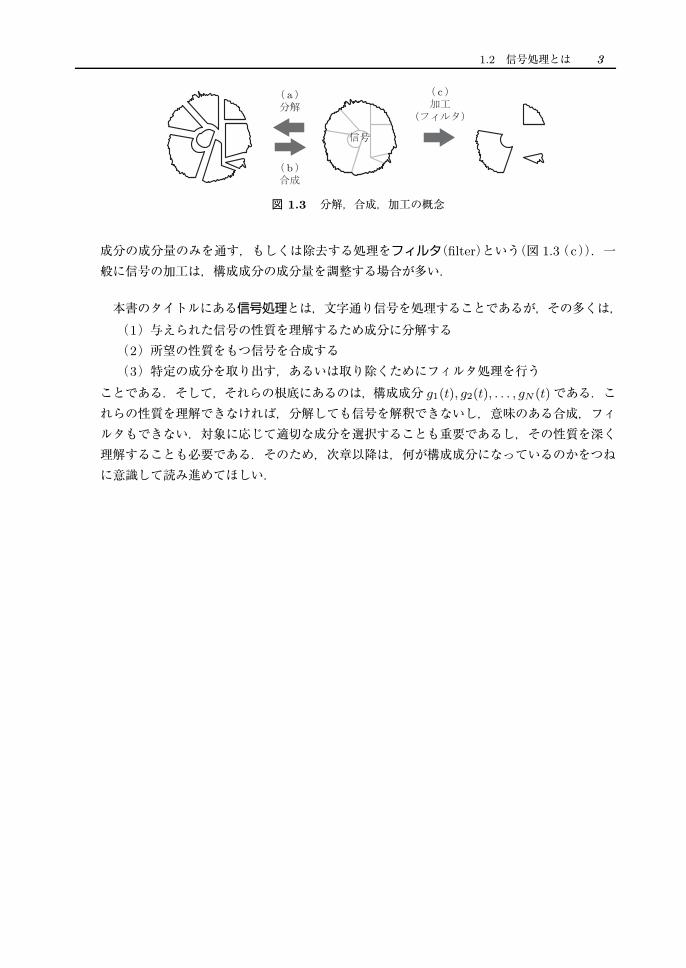
と表現できる.構成成分の性質を私たちが理解できるならば,信号をこれらの成分に分解することにより,信号を理解しやすくなる(図 1.3(a)).分析とは,未知のものを既知の構成要素に分解することを意味する.分析,分解,解析は,英語では,すべて analysisであり,同じことを意味する.
信号の合成 所望の性質をもつ薬などを作る場合,必要な成分を必要な量だけ集めてきて混ぜ合わせることになる.このような作業を合成(図 1.3(b)),英語では synthesisという.信号x(t)の合成は,式(1.1)の右辺から左辺を得る作業にほかならない.
信号の加工 コーヒーを入れる場合,コーヒーフィルタを通すことにより,コーヒーのうち水に溶け出す成分だけを取り出し,豆のカラを除去する.信号についても同様に,特定の構成
1.2 信号処理とは 3
図 1.3 分解,合成,加工の概念
成分の成分量のみを通す,もしくは除去する処理をフィルタ(filter)という(図 1.3(c)).一般に信号の加工は,構成成分の成分量を調整する場合が多い.
本書のタイトルにある信号処理とは,文字通り信号を処理することであるが,その多くは,(1)与えられた信号の性質を理解するため成分に分解する(2)所望の性質をもつ信号を合成する(3)特定の成分を取り出す,あるいは取り除くためにフィルタ処理を行う
ことである.そして,それらの根底にあるのは,構成成分 g1(t), g2(t), . . . , gN (t)である.これらの性質を理解できなければ,分解しても信号を解釈できないし,意味のある合成,フィルタもできない.対象に応じて適切な成分を選択することも重要であるし,その性質を深く理解することも必要である.そのため,次章以降は,何が構成成分になっているのかをつねに意識して読み進めてほしい.

4
第 2 章
フーリエ級数
キーワード周期,周期信号,基本周期,基本周波数,非周期信号,角周波数,三角級数,最小 2乗法,直交性,フーリエ係数,フーリエ級数,フーリエ級数展開,フーリエスペクトル,複素指数関数,複素形式のフーリエ級数,位相,パーセバルの等式
本章では,周期性をもつ信号を成分に分解して表現するために必要なフーリエ級数について学ぶ.このような周期性をもつ信号の構成成分となるのが,sin関数,cos関数,これらを複素数に拡張した複素指数関数である.とくに複素指数関数を構成成分とする考え方を学ぶ.
2.1 周期信号と非周期信号
信号には周期的に似たような傾向を示す信号がある.たとえば,気温の変化は,24時間ごとに,そして 1年ごとに似たような傾向を示す.このような信号を周期信号という.この似たような傾向を示す間隔を周期という.気温の変化は,24時間と 1年の周期をもつことになる.周期のうち,もっとも短いものを基本周期という.基本周期は T0 で表す.基本周期 T0
の逆数 f0 = 1/T0 は,1秒間に基本周期がいくつあるかを表し,基本周波数という.基本周期の単位は [s]であり,その逆数である基本周波数 f0 の単位は [s−1]であるが,[Hz](ヘルツ)を使うことになっている.一方,周期をもたない信号を非周期信号という.非周期信号については,周期信号の一周期分を取り出した特殊なものとして第 3章で扱い,本章ではまず周期信号について扱う.
2.2 三角級数
第 1章で述べたように,信号の性質を理解するためには,構成成分に分解して表現することが基本となる.周期信号 x(t)の性質を理解するために,どのような構成成分が望ましいかを考えてみよう.ところで,基本周波数 f0 の整数倍の周波数 0, f0, 2f0, 3f0, . . . の余弦波と正弦波を項とする級数

2.2 三角級数 5
∞∑n=0
[an cos(2πnf0t) + bn sin(2πnf0t)
]を,三角級数という.an,bn は三角級数の係数である.三角級数もまた基本周波数 f0をもつから,この三角級数で周期信号を表現してみよう.気温の変化は,24時間と 1年の周期をもつといっても,毎日,厳密に同じ気温の変化を示すわけではない.そこで,構成成分に分解して表現する際には,表現しきれない残りの成分があることを考慮しなければいけない.このような残りの成分を e(t)で表す.また,三角級数において,n = 0の場合,cos(2π · 0f0t) = 1,sin(2π · 0f0t) = 0であることを考慮して,周期信号 x(t)を次式のように表現する.
x(t) = a0 · 1 +∞∑
n=1
[an cos(2πnf0t) + bn sin(2πnf0t)
]+ e(t) (2.1)
式(1.1)と比較すると,
式(2.1)は,周期信号 x(t)を構成成分 cos(2πnf0t), sin(2πnf0t), n = 0, 1, 2, . . .
の和に分解し,それぞれの成分量が an, bn, n = 0, 1, 2, . . .となっていることを意味する(図 2.1)
ことがわかる.ところで,周波数 f に 2πを乗じたものを角周波数 ω = 2πf という.周波数 f の単位は,
[s−1]もしくは [Hz]であるが,角周波数の単位は [rad/s]である.今後は,2πf0 と書く表記
図 2.1 三角級数により周期信号の分解
6 第 2章 フーリエ級数
上の煩わしさを避けるため,ω0 = 2πf0 とおく.ω0 を基本角周波数という.角周波数を用いると,式(2.1)は,
x(t) = a0 · 1 +∞∑
n=1
[an cos(nω0t) + bn sin(nω0t)
]+ e(t) (2.2)
と書ける.次に,構成成分である三角関数の成分量となる係数 an,bn を求めるため,事前に最小 2
乗法を学んでおこう.
2.3 最小2乗法
信号を分解して表現する基本式(1.1)において,既知の構成成分では表現しきれない残りの成分 e(t)を付加した
x(t) = c1g1(t) + c2g2(t) + · · ·+ cNgN (t) + e(t) (2.3)
を考える.信号 x(t)において,既知の構成成分で表せるものは表しているならば,残りの成
分 e(t)は最小になっているはずである.残りの成分の総量を 2乗積分値 J =
∫ ∞
−∞e2(t)dt
で評価することにする.この 2乗積分値 J を最小にするように係数 c1, . . . , cN を決める.このような係数の決定法を最小 2乗法という.2乗積分値 J は,式(2.3)より,
J =
∫ ∞
−∞
[x(t)−
N∑n=1
cngn(t)
]2
dt (2.4)
となる.2乗積分値 J を係数 ck で偏微分してゼロとおいた方程式を解けば,2乗積分値 J を最小にする係数 c1, c2, . . . , cN が求められる.2乗積分値 J を係数 ck で偏微分すると,
∂J
∂ck= 2
∫ ∞
−∞x(t)gk(t) dt− 2
N∑n=1
cn
∫ ∞
−∞gn(t)gk(t) dt (2.5)
となり,これをゼロに等しいとおくと,連立方程式∫ ∞
−∞x(t)gk(t) dt =
N∑n=1
cn
∫ ∞
−∞gn(t)gk(t) dt, k = 1, 2, . . . , N (2.6)
が得られる.ここで,x(t)と y(t)の内積を
〈x, y〉 =∫ ∞
−∞x(t)y(t) dt (2.7)
と書くことにすると,式(2.6)は,
〈x, gk〉 =N∑
n=1
ck〈gn, gk〉, k = 1, 2, . . . , N (2.8)
と簡単に書ける.さらに見通しをよくするために,以下の行列,ベクトルを導入する.
2.4 フーリエ級数 7
R ≡
⎛⎜⎜⎜⎜⎜⎝〈g1, g1〉 〈g2, g1〉 · · · 〈gN , g1〉〈g1, g2〉 〈g2, g2〉 · · · 〈gN , g2〉
......
. . ....
〈g1, gN 〉 〈g2, gN 〉 · · · 〈gN , gN 〉
⎞⎟⎟⎟⎟⎟⎠ , c ≡
⎛⎜⎜⎜⎜⎜⎝c1
c2...
cN
⎞⎟⎟⎟⎟⎟⎠ , r ≡
⎛⎜⎜⎜⎜⎜⎝〈x, g1〉〈x, g2〉
...
〈x, gN 〉
⎞⎟⎟⎟⎟⎟⎠(2.9)
これらの行列,ベクトルを用いれば,式(2.6)は,
Rc = r (2.10)
と書ける.上式において,行列Rが正則,つまり逆行列が存在するならば,係数を表すベクトル cは,
c = R−1r (2.11)
となる.一般に,係数 c1, c2, . . . , cN を求めるためには,このような連立一次方程式を解かなければならないが,仮に,各成分が
〈gn, gk〉 = 0, n �= k (2.12)
となるならば,行列Rは対角行列になるから,係数は,
ck =1
〈gk, gk〉 〈x, gk〉, k = 1, 2, . . . , N (2.13)
として簡単に求められる.式(2.12)を満たす性質を直交性という.すべての構成成分が直交性をもつ場合,その成分量を簡単に求めることができる.
2.4 フーリエ級数
最小 2乗法により,式(2.2)で表される三角級数の係数 an,bnを求めてみよう.信号 x(t)は周期信号であるから,三角級数で表現できない残りの成分 e(t)の総量の評価範囲を [−∞,∞]
ではなく,1周期分 [0, T0]に限定してもよい.また,三角関数は,∫ T0
0
cos(nω0t) dt = 0,
∫ T0
0
sin(nω0t) dt = 0
∫ T0
0
cos(kω0t) cos(nω0t) dt =
⎧⎨⎩T0
2, k = n
0, k �= n∫ T0
0
sin(kω0t) sin(nω0t) dt =
⎧⎨⎩T0
2, k = n
0, k �= n∫ T0
0
cos(kω0t) sin(nω0t) dt = 0
n, k = 1, 2, . . .
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭
(2.14)

8 第 2章 フーリエ級数
となるから,直交性をもつことがわかる.このため,式(2.9)で定義される行列Rは対角行列になり,係数は,式(2.13)より次のようになる.
a0 =1
T0
∫ T0
0
x(t) dt
an =2
T0
∫ T0
0
x(t) cos(nω0t) dt
bn =2
T0
∫ T0
0
x(t) sin(nω0t) dt
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭(2.15)
式(2.15)で決められた係数 an,bn をフーリエ係数,フーリエ係数を係数にもつ三角級数をフーリエ級数という.また,周期信号をフーリエ級数で展開して表現することをフーリエ級数展開という.フーリエ係数をフーリエスペクトル,あるいは単にスペクトルともいう.
例題 2.1
図 2.2に示す信号 x(t)の基本周期 T0,基本周波数 f0,基本角周波数 ω0,およびフーリエ係数を求めよ.
図 2.2
解答 基本周期 T0 は明らかに T0 = 2 [s]である.基本周波数 f0 は,f0 = 1/T0 より,f0 = 0.5
[Hz]となる.基本角周波数 ω0は,ω0 = 2πf0より,ω0 = π[rad/s]となる.フーリエ係数は,以下のように計算できる.
a0 =1
T0
Z T0
0
x(t) dt =1
2
»Z 1
0
1 dt+
Z 2
1
0 dt
–=
1
2
a1 =2
T0
Z T0
0
x(t) cos(ω0t) dt =2
2
»Z 1
0
1 · cos(πt) dt+Z 2
1
0 · cos(πt) dt–= 0
b1 =2
T0
Z T0
0
x(t) sin(ω0t) dt =2
2
»Z 1
0
1 · sin(πt) dt+Z 2
1
0 · sin(πt) dt–=
2
π
a2 =2
T0
Z T0
0
x(t) cos(2ω0t) dt =2
2
»Z 1
0
1 · cos(2πt) dt+Z 2
1
0 · cos(2πt) dt–= 0
b2 =2
T0
Z T0
0
x(t) sin(2ω0t) dt =2
2
»Z 1
0
1 · sin(2πt) dt+Z 2
1
0 · sin(2πt) dt–= 0
a3 = 0, b3 =2
3π
a4 = 0, b4 = 0
a5 = 0, b5 =2
5π...
...
an = 0, bn =
8><>:
0, nが偶数
2
nπ, nが奇数

2.6 複素数と複素指数関数 9
2.5 三角級数,フーリエ級数の価値
周期信号を分解して表現するための構成成分として三角関数,つまり三角級数が適しているかを考えてみよう.前に述べたように,そのために必要な条件は,(1)周期信号を三角級数で精度よく表現できること(2)構成成分である三角関数,そしてその成分量を私たちが解釈できること
である.まず,条件(1)については,信号が,周期 T だけずらしても元の信号に完全に一致する厳密な周期信号1)であり,かつ連続ならば,三角級数により完全に表現できることが証明されている2).そのため,周期信号を三角級数で精度よく表現できることについては保証されている.条件(2)については,具体的に私たちが正弦波(あるいは余弦波)をどのように利用しているかを考えればよい.人は,おおよそ周波数 20 [Hz]から 20 [kHz]の正弦波(あるいは余弦波)の音を聞き取ることがでる.低い周波数の正弦波は「低い音」,高い周波数の正弦波は「高い音」として感じる.また,母音により成分量が多く含まれる周波数が異なることがわかっている.一方,光でいえば,ヒトは,おおよそ周波数 405 [THz]から 790 [THz]の光を可視光として知覚することができる.可視光も周波数によって赤,オレンジ,黄色,緑,青,藍色,紫色として知覚される.これらの例からわかるように,私たちはすでにさまざまな周波数の音や光(電磁波)がどのような性質をもつのかを経験的に知り,その知識を利用しているのである.このことは,三角級数の成分としての意味を私たちが解釈できていることにほかならない.以上が,周期信号を表現するための成分として三角級数,つまりフーリエ級数を利用することの根拠である.
2.6 複素数と複素指数関数
複素形式のフーリエ級数を学ぶために,事前に複素数と複素指数関数について復習しておこう.本書では虚数単位を
i =√−1
とし,x,yを実数として複素数を
z = x+ iy
で表す.x,yをそれぞれ複素数 zの実部,虚部という.実部と虚部で張られる空間を複素平面,あるいはガウス平面という(図 2.3(a)).実部を表す軸を実軸,虚部を表す軸を虚軸と
1) 本来は,これを周期信号という.2) 不連続点については,右極限と左極限の中点を表現する.

10 第 2章 フーリエ級数
図 2.3 複素数,複素指数関数の表現
いう.また,複素数 zの実部,虚部を取り出す演算子をそれぞれ
x = Re[z], y = Im[z]
とする.z = x+ iyに対し,虚部の符号を反転させた x− iyを zの複素共役といい,z∗ と書く.複素平面において,原点から zまでの距離
A = |z| =√
x2 + y2
を絶対値という(図 2.3(b)).ここで,zz∗ = (x + iy)(x − iy) = x2 + y2 であることから,絶対値を
|z| = √zz∗
と書くことができる.また,正の実軸から反時計回り方向の zの角度
φ = arg z = tan−1(yx
)

2.6 複素数と複素指数関数 11
を偏角という.(A,φ)を複素数の極形式による表現という.逆に,x = A cosφ,y = A sinφ
と書くこともできる.複素数 z に対して適用される指数関数 ez を複素指数関数という.ez = ex+iy = exeiy であるが,exは実指数関数であるから,eiy を新たに定義すればよい.複素関数論では,φを実数として,eiφを絶対値が 1,偏角が φであるような複素数として定義している(図 2.3(c)).すなわち,
eiφ = cosφ+ i sinφ
と書くことができる.φに −φに置き換えて cosが偶関数であることを利用すると,
e−iφ = cosφ− i sinφ
が得られる.これらの式の和,もしくは差により次式を得る.
cosφ =eiφ + e−iφ
2, sinφ =
eiφ − e−iφ
2i(2.16)
これらをオイラーの関係式という.複素指数関数を用いると,本書でもっとも重要な複素指数関数を用いた複素数の極形式表現
z = x+ iy = Aeiφ
が得られる(図 2.3(d)).複素指数関数を用いた複素数の極形式を用いると,複素数どうしの積算(除算)が簡単になる.z1 = A1e
iφ1,z2 = A2eiφ2 とすると,それらの積は,
z1z2 = A1A2ei(φ1+φ2)
となり,絶対値はそれぞれの絶対値の積,偏角はそれぞれの偏角の和で表現される.さて,eiφ において,偏角 φが時刻 tとともに線形に増加する関数 φ = 2πtである場合を考える.この関数 ei2πt は,複素平面において原点Oを中心とし,半径 1の単位円上を反時計回りに回転する点を表す(図 2.3(e)).t = 0で実軸上 1 + i0にあり,t = 1, 2, 3, . . . で再び t = 0と同じ位置に戻る.つまり,回転数は 1 [Hz]である.オイラーの関係式(2.16)を利用すると,この関数は,
ei2πt = cos(2πt) + i sin(2πt) (2.17)
と書けるので,実部での動きを観察すると cos関数,虚部での動きを観察すると sin関数になる.一般に,Aを実数とし,Aei2πft は,f が正の場合,複素平面において原点 Oを中心とし半径Aの円周上を,偏角 0を始点にして反時計回りに 1秒間に f 回転する点を表す.f が負の場合,逆方向,つまり時計回りに周ることを意味する.ところで,cが複素数の場合,cei2πft は何を表すだろうか.c = |c|ei arg c と表せるので,
cei2πft = |c|ei arg cei2πft = |c|ei(2πft+arg c) (2.18)

12 第 2章 フーリエ級数
となる.つまり,cei2πft は,f が正の場合,複素平面において原点 Oを中心とし半径 |c|の円周上を反時計回りに 1秒間に f 回転する点を表すが,t = 0では偏角 arg cであることを意味する(図 2.3( f)).あるいは,τ = (arg c)/(2πf)とおいて,
cei2πft = |c|ei2πf(t+τ) (2.19)
と書くことができるので,t = −τ のとき,偏角 0に至ることになる.-+0.00
2.7 複素形式のフーリエ級数
cos関数,sin関数を成分として用いるフーリエ級数を,オイラーの関係式を利用して複素指数関数を用いて表現し直してみよう.まず,三角級数を表す式(2.2)にオイラーの関係式(2.16)を代入することにより,cos関数,
sin関数を複素指数関数に置き換えると,
x(t) = a0 +
∞∑n=1
(an2einω0t +
bn2i
einω0t +an2e−inω0t − bn
2ie−inω0t
)+ e(t)
= a0 +
∞∑n=1
(an − ibn
2einω0t +
an + ibn2
e−inω0t
)+ e(t) (2.20)
となる.ここで,複素数 cn を
c0 = a0
cn =an − ibn
2, n = 1, 2, . . .
c−n =an + ibn
2, n = 1, 2, . . .
⎫⎪⎪⎪⎪⎬⎪⎪⎪⎪⎭(2.21)
と定めると,式(2.20)は,
x(t) =∞∑
n=−∞cne
inω0t + e(t) (2.22)
と書き直せる.上式は,複素指数関数を成分とする表現となっており,複素形式の三角級数という.次に,その成分量 cnを求めるため,式(2.21)に式(2.15)を代入し,オイラーの関係式(2.16)を適用すると,成分量 cn は,
cn =1
T0
∫ T0
0
x(t)e−inω0t dt (2.23)
となる.上式で与えられる cnを複素形式のフーリエ係数,このような cnをもつ複素形式の三角級数を複素形式のフーリエ級数という.複素形式のフーリエ級数の理解の仕方を学ぼう.nを正として,角周波数 nω0と−nω0の複素指数関数の成分の和
cneinω0t + c−ne
−inω0t (2.24)

23
第 3 章
フーリエ変換
キーワードフーリエ積分,フーリエ変換,逆フーリエ変換,フーリエスペクトル,振幅スペクトル,パワースペクトル,位相スペクトル,畳み込み積分,自己相関関数,シンク関数
前章で,周期性をもつ信号を扱ったが,周期性をもたない信号もある.本章では,周期性をもたない非周期信号を成分に分解して表現するために必要なフーリエ変換について学ぶ.実は,非周期信号も周期性をもつ三角関数で表現できる.また,フーリエ変換の性質と代表的な信号のフーリエ変換の例を紹介する.さらに,フーリエ級数とフーリエ変換の関係についても学ぶ.この関係は,後の章で説明するディジタル化に必要な標本化定理を学ぶための重要な基礎となる.
3.1 フーリエ級数からフーリエ変換へ
非周期信号は,周期信号において基本周期 T0 を T0 → ∞とした場合であると考えることができる.そこで,周期信号を表現するフーリエ級数において,T0 → ∞としてみよう.フーリエ級数が基本となるので,まず,第 2章で学んだ複素形式のフーリエ級数とフーリエ係数を与える式を復習がてら再掲しておこう.
x(t) ∞∑
n=−∞cne
inω0t (3.1)
cn =1
T0
∫ T0/2
−T0/2
x(t)e−inω0t dt (3.2)
ただし,近似誤差 e(t)をつける代わりに近似という意味の を用いた.また,式(3.2)における周期信号の基本区間は,幅が基本周期 T0 に一致していればどのようにとってもかまわないので,[0, T0]を [−T0/2, T0/2]とした.さて,周期性をもたない非周期信号を表現してみよう.2.5節で述べたように,われわれは周波数でさまざまなことを理解できるため,周波数成分に分解して表現したいが,非周期信号にフーリエ級数を適用できるだろうか.そこで,図 3.1に示すように,周期信号の基本区間どうしの間隔を無限に大きくした非周期信号を考える.tを τ に置き換えて T0 = 2π/ω0
(ω0 = 2πf0 = 2π/T0 なので)を代入した式(3.2)を式(3.1)に代入すると,

24 第 3章 フーリエ変換
図 3.1 フーリエ級数からフーリエ変換へ
x(t) ∞∑
n=−∞
{ω0
2π
∫ T0/2
−T0/2
x(τ)e−inω0τ dτ
}einω0t
が得られる.周期信号の基本区間どうしの間隔を広げることは,基本周期 T0 →∞を意味する.T0 →∞では,ω0 =
2π
T0→ 0なので,上式において,ω0をΔωとおき,積分と総和の
順序を交換すると,
x(t) 1
2π
∫ T0/2
−T0/2
x(τ)
{ ∞∑n=−∞
ei(t−τ)nΔωΔω
}dτ (3.3)
となる.ここで,定積分の定義が∫ ∞
−∞f(x)dx = lim
Δx→0
∞∑n=−∞
f(nΔx)Δx
であることを思い出そう.T0 →∞,すなわちΔω → 0とするので,式(3.3)の { }内は,
limΔω→0
∞∑n=−∞
ei(t−τ)nΔωΔω =
∫ ∞
−∞ei(t−τ)ω dω (3.4)
となる.したがって,式(3.3)は,Δω → 0では式(3.4)を代入して,
x(t) 1
2π
∫ ∞
−∞
{∫ ∞
−∞x(τ)e−iωτdτ
}eiωt dω (3.5)
となる.上式の右辺をフーリエ積分(Fourier integral)という.x(t)が絶対可積分,つまり∫ ∞
−∞|x(t)| dt < ∞を満たし,かつ全区間 (−∞,∞)で区分的に連続ならば,次の定理が成
り立つ.
定理 3.1 フーリエ積分
絶対可積分,かつ全区間 (−∞,∞)で区分的に連続な信号 x(t)のフーリエ積分は,x(t)が連続な tでは x(t)に一致し,不連続な tでは {x(t− 0) + x(t+ 0)}/2に一致する.

3.1 フーリエ級数からフーリエ変換へ 25
定理 3.1(フーリエ積分)より,x(t)が絶対可積分かつ連続ならば,式(3.5)を等式としてもよい.不連続である場合にも,全区間 (−∞,∞)で区分的に連続であり,x(t)の不連続点 t0
については,左側極限値 x(t0− 0)と右側極限値 x(t0+0)の中間値 {x(t0− 0)+x(t0 +0)}/2を新たに x(t0)と定義しなおせば,等式とみなせる.式(3.5)の { }内を
X(ω) = F [x(t)] =∫ ∞
−∞x(t)e−iωt dt (3.6)
とおけば,式(3.5)は,
x(t) = F−1[X(ω)] =1
2π
∫ ∞
−∞X(ω)eiωt dω (3.7)
と書ける.式(3.6)を x(t)のフーリエ変換,式(3.7)をX(ω)の逆フーリエ変換という.X(ω)
は x(t)のフーリエスペクトルともいう.また,|X(ω)|を振幅スペクトル,|X(ω)|2をパワースペクトル,argX(ω)を位相スペクトルという.また,定理 3.1(フーリエ積分)は,x(t)が絶対可積分,かつ全区間 (−∞, ∞)で区分的に連続であることは,x(t)が連続な tでは x(t)に一致し,不連続な tでは {x(t− 0)+x(t+0)}/2に一致するための十分条件であり,必要十分条件ではないことに注意しよう.つまり,このような条件を満たさない x(t)についてもフーリエ変換,逆フーリエ変換が可能な場合もある.たとえば,3.3節で述べる直流信号は,絶対可積分ではないがフーリエ変換は可能である.ここで,フーリエ級数とフーリエ変換の関係を示しておこう.基本周期 T0 →∞とした周期信号 x(t)は,図 3.1(c)からわかるように,その基本区間外をゼロとおいた信号に相当するから,そのフーリエ変換は,式(3.6)より,
X(ω) =
∫ T0/2
−T0/2
x(t)e−iωt dt
となる.周波数 ωと基本周波数 ω0 = 2π/T0 の関係を ω ≡ nω0 とおけば,上式は,
X(nω0) =
∫ T0/2
−T0/2
x(t)e−inω0t dt (3.8)
と書ける.上式と式(3.2)を比較することにより,次の関係式が得られる.
cn =1
T0X(nω0) (3.9)
上式は,基本周期 T0 の周期信号 x(t)のフーリエ係数 cn が,周期信号 x(t)の基本区間のみを取り出した信号のフーリエ変換 X(ω)の間隔 ω0(= 2π/T0)ごとの値の 1/T0 倍に等しいことを意味している(図 3.2).さらに,式(3.9)を式(3.1)に代入すれば,
x(t) 1
T0
∞∑n=−∞
X(nω0)einω0t (3.10)
となる.周期信号 x(t)は,その基本区間のフーリエ変換 X(ω)の間隔 ω0(= 2π/T0)ごとの値X(nω0)のみで表現できることになる.

26 第 3章 フーリエ変換
図 3.2 フーリエ級数とフーリエ変換の関係
また,式(3.10)と式(3.7)を比較することにより,基本周期 T0の周期信号 x(t)のフーリエ
変換 X̃(ω)は,ω = nω0 でのみ非 0の値 2π
T0X(nω0)をとることがわかる.すなわち,
X̃(ω) =2π
T0X(ω), ω = nω0, n ∈ Z
となる.成分の立場からフーリエ級数とフーリエ変換の違いを考えてみよう.周期信号は,基本周波数の整数倍の周波数の複素指数関数を成分にもっており,これを表現するのがフーリエ級数であった.一方,非周期信号は,すべての周波数の複素指数関数を成分にもっており,これを表現するのがフーリエ変換である.周期信号である複素指数関数を成分として,非周期信号を作り出せるのが不思議に感じるが,すべての周波数の複素指数関数を使えば非周期信号を作ることができるのである.
例題 3.1
次式で表される信号 xn(t)のフーリエ変換Xn(ω)を求めよ(図 3.3).ただし,a > 0とする.
x1(t) =
(e−at, t ≥ 0
0, t < 0(a)
x2(t) =
(te−at, t ≥ 0
0, t < 0(b)
x3(t) = e−a|t| (c)
図 3.3

3.2 フーリエ変換の性質 27
解答 (a)式(a)を式(3.6)に代入することにより,次式となる.
X(ω) =
Z ∞
0
e−ate−iωt dt =
Z ∞
0
e−(a+iω)t dt
=−1
a+ iω
he−(a+iω)t
i∞0
=1
a+ iω
(b)式(b)を式(3.6)に代入することにより,
X(ω) =
Z ∞
0
te−ate−iωt dt =
Z ∞
0
te−(a+iω)t dt
=
» −t
a+ iωe−(a+iω)t
–∞
0
−Z ∞
0
−1
a+ iωe−(a+iω)t dt
= 0 +1
a+ iω
Z ∞
0
e−(a+iω)t dt =1
(a+ iω)2
となる.一般に,
x(t) =
8><>:
tn−1
(n− 1)!e−at, t ≥ 0
0, t < 0
のフーリエ変換は,次式となる.
X(ω) =1
(a+ iω)n
(c)式(c)を式(3.6)に代入することにより,
X(ω) =
Z ∞
−∞e−a|t|e−iωt dt
=
Z 0
−∞eate−iωt dt+
Z ∞
0
e−ate−iωt dt
となり,右辺の二つの積分を別々に行うことにより,次式となる.
X(ω) =1
a− iω+
1
a+ iω=
2a
a2 + ω2
3.2 フーリエ変換の性質
フーリエ変換の重要な性質を紹介する.
線形性 式(3.6)の x(t)に ax(t) + by(t)を代入することにより,
F [ax(t) + by(t)] = aF [x(t)] + bF [y(t)]
を得る.つまり,時間軸における二つの信号の線形結合 ax(t) + by(t)のフーリエ変換は,それぞれのフーリエ変換を a倍,b倍したものの和となる.つまり,フーリエ変換は,線形変換である.
時間軸の反転 式(3.6)の x(t)に x(−t)を代入し,−tを τ に置き換えることにより,

28 第 3章 フーリエ変換
F [x(−t)] =∫ ∞
−∞x(−t)e−iωtdt
=
∫ −∞
∞x(τ)e−iω(−τ)(−1)dτ
=
∫ ∞
−∞x(τ)e−i(−ω)τdτ
= X(−ω)
を得る.つまり,時間軸を反転した信号 x(−t)のフーリエ変換は,元の信号のフーリエ変換X(ω)を周波数軸で反転したものとなる.
時間軸の伸縮 式(3.6)の x(t) に x(t/a),a > 0 を代入し,τ = t/a(dτ = (1/a) dt よりdt = adτ)と変数変換することにより,
F [x(t/a)] =∫ ∞
−∞x(t/a)e−iωt dt =
∫ ∞
−∞x(τ)e−iωaτadτ
= a
∫ ∞
−∞x(τ)e−iωaτ dτ = aX(ωa), a > 0
を得る.さらに,時間軸を反転すれば,
F [x(−t/a)] = aX(−ωa), a > 0
となる.したがって,aが正の場合と負の場合をまとめて書けば,
F [x(t/a)] = |a|X(aω), a �= 0
となる.つまり,時間軸を a(�= 0)倍に広げた信号のフーリエ変換は,元の信号 x(t)のフーリエ変換X(ω)の周波数軸を 1/a倍,振幅を |a|倍したものになる.図 3.4(a)では,ある信号 x(t)とフーリエ変換X(ω)の関係を示している.この信号の時間軸を 2倍に広げた信号とそのフーリエ変換を図(b)に示す.時間軸を 2倍に広げた信号のフーリエ変換は,a = 2であるから,周波数軸は 1/2に縮み,振幅は 2倍になる.
時間軸推移 式(3.6)の x(t)を x(t− τ)に置き換えれば,
F [x(t− τ)] =
∫ ∞
−∞x(t− τ)e−iωt dt
となり,右辺について,変数変換 t− τ = aを行えば
F [x(t− τ)] =
∫ ∞
−∞x(a)e−iωae−iωτda
=
∫ ∞
−∞x(a)e−iωada · e−iωτ
= X(ω)e−iωτ
となる.したがって,τ だけ時間軸推移させた(遅らせた)信号のフーリエ変換は,元の信号x(t)のフーリエ変換 X(ω)に,e−iωτ を乗じたものとなる.図 3.4において,図(a)に示し

3.2 フーリエ変換の性質 29
図 3.4 時間軸の伸縮と推移
た信号を τ だけ時間軸推移させた信号とそのフーリエ変換を図(c)に示す.時間軸推移させる前の信号に e−iωτ が乗じられることにより,位相が周波数 ω について −ωτ [rad]だけ変化している.
フーリエ変換の実部と虚部 式(3.6)の両辺の複素共役をとると,
X∗(ω) =∫ ∞
−∞x∗(t)eiωtdt
となり,さらに,ωを −ωに置き換えると,
X∗(−ω) =∫ ∞
−∞x∗(t)e−iωtdt = F [x∗(t)] (3.11)

30 第 3章 フーリエ変換
となる.信号 x(t)が実数をとるとすれば,x∗(t) = x(t)なので,
X∗(−ω) = X(ω) (3.12)
となる.上式の両辺の実部,あるいは虚部をとれば,
Re[X(ω)] = Re[X(−ω)]Im[X(ω)] = − Im[X(−ω)]
⎫⎬⎭ (3.13)
となる.つまり,実数値をとる信号 x(t)のフーリエ変換は,実部が偶関数,虚部が奇関数になる.このことより,正の ωについてX(ω)を知っていれば,負の ωについてもX(ω)の値を知ることができる.図 3.4より,フーリエ変換の実部は偶関数,虚部は奇関数になっていることがわかる.
偶関数,あるいは奇関数のフーリエ変換 信号 x(t)が偶関数の場合には,オイラーの公式e−iωt = cos(ωt)− i sin(ωt)より,
Im[X(ω)] = −∫ ∞
−∞x(t) sin(ωt) dt = 0
となる.同様に,信号 x(t)が奇関数の場合,
Re[X(ω)] =
∫ ∞
−∞x(t) cos(ωt) dt = 0
となる.つまり,偶関数のフーリエ変換は実数値をとり,奇関数のフーリエ変換は純虚数値をとる.図 3.4において,図(a),(b)は,偶関数のフーリエ変換は実数値をとり,図(d)は,奇関数に対するフーリエ変換が純虚数値をとることを示している.図(c)のように偶関数でも奇関数でもない場合,そのフーリエ変換は複素数をとる.
例題 3.2
図 3.5(a)~(e)に示す各信号 xn(t)のフーリエ変換Xn(ω)を求めよ.ただし,(a)は式 (3.6)
図 3.5

3.2 フーリエ変換の性質 31
を利用し,(b)~(e)はフーリエ変換の性質を利用して求めること.また,(a)は偶関数,(d)は奇関数である.それぞれのフーリエ変換が実数,純虚数となることを確認せよ.さらに,(b)の場合について,そのフーリエ変換は,実部が偶関数,虚部が奇関数になることを確認せよ.解答 (a)x1(t) = 1, − 1/2 ≤ t ≤ 1/2なので,式(3.6)に代入すると,
X1(ω) =
Z 1/2
−1/2
e−iωtdt
=1
−iω
ˆe−iωt
˜1/2−1/2
=1
−iω
“e−iω/2 − eiω/2
”
=2
ω
eiω/2 − e−iω/2
2i=
2
ωsin
“ω
2
”となる.偶関数である x1(t)のフーリエ変換は,実数値をとる関数となる.(b)x2(t)は,x1(t)の時間軸を τ = 1/2だけ遅らせたものとなっているので,X2(ω)は,X1(ω)
に e−iτω を乗じたものである.すなわち,
X2(ω) = X1(ω)e−iω/2 =
1
−iω
“e−iω/2 − eiω/2
”e−iω/2
=i
ω(−1 + e−iω)
となる.上式に,オイラーの公式 e−iω = cos(ω)− i sin(ω)を適用して実部と虚部を求めると,それぞれ
Re[X1(ω)] =sinω
ω
Im[X1(ω)] =1
ω(cosω − 1)
となる.これより,実部は偶関数,虚部は奇関数となることがわかる.(c)x3(t)は,x2(t)の時間軸を反転したものとなっているので,X3(ω) = X2(−ω)となる.すなわち,次式となる.
X3(ω) = X2(−ω) =i
−ω(−1 + eiω)
=i
ω(1− eiω)
(d)x4(t) = x2(t) + (−1)x3(t)であるので,
X4(ω) = X2(ω)−X3(ω) =i
ω(−1 + e−iω)− i
ω(1− eiω)
=2i
ω(cos(ω)− 1)
となる.奇関数である x4(t)のフーリエ変換は,純虚数値をとる関数となる.(e)x5(t)は,x2(t)の時間軸を 4倍にのばしたもの,つまり,x5(t) = x1(t/4)となっている.a = 1/4として時間軸の伸縮の性質を利用すれば,次式となる.
X5(ω) =1
|a|X2
“ω
a
”
=4i
ω(−1 + e−4iω)

32 第 3章 フーリエ変換
対称性(双対性) 式(3.7)において,tと ωを交換し,ωを新たに −ωとおけば,
x(−ω) = 1
2π
∫ ∞
−∞X(t)e−iωt dt
となる.上式と式(3.6)とを比較することにより,
F [X(t)] = 2πx(−ω)
となる.つまり,x(t)をフーリエ変換したものが X(ω)であるとき,X(t)をフーリエ変換すると,2πx(−ω)になる.これを時間軸と周波数軸の対称性(双対性)という.周波数軸推移 時間軸推移とは逆に,式(3.7)のX(ω)をX(ω − a)に置き換えることにより,
F−1[X(ω − a)] =1
2π
∫ ∞
−∞X(ω − a)eiωt dω
となり,右辺について,変数変換 ω − a = bを行えば,
F−1[X(ω − a)] =1
2π
∫ ∞
−∞X(b)eiateibt db
= x(t)eiat
となる.すなわち,
F [x(t)eiat] = X(ω − a) (3.14)
となる.周波数軸推移を行った場合,実数値をとらない信号となる.
時間微分 式(3.7)の両辺を tで微分し,ωを a とおくと,d
dtx(t) =
1
2π
∫ ∞
−∞iaX(a)eiat da
となる.上式の両辺をフーリエ変換すると,
F[d
dtx(t)
]=
1
2π
∫ ∞
−∞iaX(a) F [eiat] da
である.3.3節で述べるが,複素指数関数 eiat のフーリエ変換が 2πδ(ω − a)になること(式(3.25))を利用すると,
F[d
dtx(t)
]=
1
2π
∫ ∞
−∞iaX(a) 2πδ(ω − a) da
= iωX(ω) (3.15)
となる.すなわち,x(t)を微分した信号のフーリエ変換は,元の信号 x(t)のフーリエ変換X(ω)に iωを乗じたものとなる.
パーセバルの等式 逆フーリエ変換,すなわち式(3.7)の両辺にそれぞれの複素共役を乗じて積分すると,
|x(t)|2 =1
(2π)2
∫ ∞
−∞
∫ ∞
−∞X(ω)X∗(ω′)eiωte−iω′t dωdω′

3.2 フーリエ変換の性質 33
となり,さらに,両辺を tで積分すると,∫ ∞
−∞|x(t)|2dt = 1
(2π)2
∫ ∞
−∞
∫ ∞
−∞X(ω)X∗(ω′)
{∫ ∞
−∞eiωte−iω′t dt
}dωdω′
となる.右辺の { }内は,eiωtのフーリエ変換 2πδ(ω′ − ω)なので,デルタ関数の定義を利用すれば,次の等式が得られる.∫ ∞
−∞|x(t)|2dt = 1
2π
∫ ∞
−∞|X(ω)|2dω
この等式は,フーリエ変換の前後でエネルギー保存の法則が成立することを意味し,パーセバルの等式という.
畳み込み積分 信号 x(t),y(t),z(t)のフーリエ変換をそれぞれX(ω),Y (ω),Z(ω)とする.これらに
Z(ω) = X(ω)Y (ω)
なる関係があるとき,x(t),y(t),z(t)には,どのような関係があるだろうか.上式の右辺をx(t),y(t)を使って
Z(ω) =
∫ ∞
−∞x(t)e−iωtdt ·
∫ ∞
−∞y(t)e−iωtdt
と表し,両辺を逆フーリエ変換すれば,
z(t) =1
2π
∫ ∞
−∞
{∫ ∞
−∞x(t1)e
−iωt1dt1 ·∫ ∞
−∞y(t2)e
−iωt2dt2}eiωtdω
=
∫ ∞
−∞
∫ ∞
−∞x(t1)y(t2)
{ 1
2π
∫ ∞
−∞eiω(t−(t1+t2)) dω
}dt1dt2 (3.16)
となる.さて,時間軸推移の性質と,インパルス信号 δ(t)のフーリエ変換が 1となる(3.3節の式(3.23)で後述する)ことから,
F [δ(t− (t1 + t2))] = 1 · e−iω(t1+t2)
であり,これを逆フーリエ変換すれば,
δ(t− (t1 + t2)) =1
2π
∫ ∞
−∞e−iω(t1+t2)eiωt dω
となるので,式(3.16)右辺の { }内に代入すると,
z(t) =
∫ ∞
−∞
∫ ∞
−∞x(t1)y(t2)δ(t− (t1 + t2)) dt1dt2
となる.ここで,t1 + t2 = τ と変数変換することにより,
z(t) =
∫ ∞
−∞
∫ ∞
−∞x(t1)y(τ − t1)δ(t− τ) dt1dτ
となる.ここで,デルタ関数の性質(式(2.29-2))より τ = tの場合のみを考えれば良いので,
z(t) =
∫ ∞
−∞x(t1)y(t− t1) dt1

34 第 3章 フーリエ変換
を得る.これは,周波数軸において積で表される二つの信号の時間軸における関係を意味する.一般に,上式右辺の演算を畳み込み積分といい,次式のように表記される.
x(t) ∗ y(t) ≡∫ ∞
−∞x(τ)y(t− τ) dτ (3.17)
あるいは,畳み込み積分後の変数名を明記する場合,x(t) ∗ y(t)を (x ∗ y)(t) と書く.自己相関関数 式(3.17)において,t− τ = σと変数変換すれば,
x(t) ∗ y(t) = −∫ −∞
∞y(σ)x(t− σ) dσ =
∫ ∞
−∞y(σ)x(t− σ) dσ
となることから,畳み込み積分は,二つの信号を交換可能な演算であることがわかる.また,x(t) = ax1(t) + bx2(t)とおけば,式(3.17)は,
z(t) = a{x1(t) ∗ y(t)
}+ b
{x2(t) ∗ y(t)
}となることから,畳み込み演算は,x(t)に関して,線形変換であることがわかる.同様に,y(t)に関しても線形性が成り立つ.逆に時間軸で積 x(t)y(t)となる二つの信号のフーリエ変換は,それぞれのフーリエ変換の畳み込み積分を 2πで割った
F [x(t)y(t)] = 1
2πX(ω) ∗ Y (ω)
となる.パワースペクトル |X(ω)|2は,
|X(ω)|2 = X(ω)X∗(ω) (3.18)
と表されるが,信号 x(t)が実数値をとる場合,X∗(ω) = X(−ω),X(−ω)の逆フーリエ変換が x(−t)となり,畳み込み積分の性質を利用すれば,
|X(ω)|2 = X(ω)X(−ω)= F [x(t)]F [x(−t)]= F [x(t) ∗ x(−t)]
= F[∫ ∞
−∞x(t)x(−(τ − t)) dt
]= F
[∫ ∞
−∞x(t)x(t− τ) dt
](3.19)
となる.上式の最後のフーリエ変換の内部の式は,畳み込み積分に似ているが,x(t)の自己相関関数といい,
R(τ) =
∫ ∞
−∞x(t)x(t− τ) dt (3.20)
と書く.x(t)の自己相関関数 R(τ)のフーリエ変換は,x(t)のパワースペクトル |X(ω)|2になる.

3.3 フーリエ変換の例 35
フーリエ変換の重要な性質を表 3.1に示す.
表 3.1 フーリエ変換の重要な性質
時間軸での表現 周波数軸での表現線形性時間軸の反転時間軸の伸縮時間軸推移対称性周波数軸推移
時間微分
畳み込み積分
積
自己相関関数 R( ) = x(t)x ω(t ττ − ) dt |X( )|2
※
∞
−∞
ax(t) + by(t) aX(ω) + bY (ω)
x(−t) X(−ω)
x(t/a) |a|X(ωa)
x(t − τ ) X(ω)e−iωτ
X(t) 2πx(−ω)
x(t)eiat X(ω − a)
d
dtx(t) iωX (ω)
x(t) ∗ y(t) X(ω)Y (ω)
x(t)y(t)1
2πX(ω) ∗ Y (ω)
X(ω) = F [x(t)], Y (ω) = F [y(t)] とする.
3.3 フーリエ変換の例
代表的なフーリエ変換の例を紹介する.
矩形波 例題 3.2(a)で扱った信号を一般化した信号
Pτ (t) =
{1, |t| ≤ τ
0, そのほか
を矩形波,あるいは方形波という.矩形波 Pτ (t)のフーリエ変換は,
F [Pτ (t)] =
∫ τ
−τ
1 · e−iωt dt
=1
−iω[e−iωt
]τ−τ
=1
iω(eiτω − e−iτω)
= 2sin(τω)
ω(3.21)
となる.ところで,sin(t)/tをシンク関数といい,sinc(t)と書く.シンク関数 sinc(t)の波形を図 3.6に示す.シンク関数については,7.2節「標本化定理」で詳しく述べる.このシンク関数 sinc(t)を用いると,式(3.21)は,
F [Pτ (t)] = 2τ sinc(τω)
と表される.

70 第 5章 システム
で与えられる入力信号 x(t)を求めよ.この入力信号を伝達関数
H(s) =s+ 19
(s+ 30)(s+ 9.8)
をもつシステムに通したときの出力信号 y(t)を求め,各成分の大きさがどのように変化したかを述べよ.ただし,初期値依存項G(s)I(s)は無視してかまわない.
解答 X(s)を部分分数分解すると,
X(s) =−1
s+ 20+
1
s+ 10
となり,逆ラプラス変換すると,
x(t) = −e−20t + e−10t
となる.一方,出力 Y (s) = H(s)X(s)を部分分数分解すると,
Y (s) =−0.010
s+ 20+
−2.250
s+ 10+
2.233
s+ 9.8+
0.027
s+ 30
となり,逆ラプラス変換すると,
y(t) = −0.010e−20t − 2.250e−10t + 2.233e−9.8t + 0.027e−30t
となる.入力信号 x(t)では,極−20,−10に対応する成分量はともに 1であった.これに対し,システムを通った後の出力信号 y(t)では,それぞれ 0.010,2.250となっている.これは,システムには s = −19に零点,s = −9.8 に極があり,入力における極 s = −20,s = −10に対応する成分をそれぞれ弱め,強めたためである.また,出力信号 Y (s)や y(t)の右辺第 3,4項は,システムの伝達関数の極 s = −9.8,s = −30に対応するシステム固有の成分であり,新たに加わったものである.
例題 5.8
伝達関数
H(s) =1
s− a
をもつシステムに複素指数関数 x(t) = eiωt を入力した際の出力 y(t)を求めよ.ただし,初期値依存項G(s)I(s)はゼロであるとする.
解答 入力 x(t) = eiω のラプラス変換X(s)は,
X(s) =1
s− iω
なので,出力信号のラプラス変換 Y (s)は,
Y (s) = H(s)X(s) =1
(s− a)(s− iω)=
1
iω − a
„ −1
s− a+
1
s− iω
«
となる.これを逆ラプラス変換して,出力
y(t) =−eat
iω − a+
eiωt
iω − a(a)
を得る.この例題は,5.4節で再び取り上げる.

5.4 周波数特性 71
このように,システムは,入力信号に含まれるさまざまな極に対応した成分に対し,システムの極に近い成分を強め,零点に近いものを弱めるなど,入力のそれぞれの成分の大きさを変化させる.
システムの安定性 伝達関数 H(s)において,s平面の右半面,すなわち原点よりも右側にある極に対応する成分は減衰ではなく発散する.このようなシステムでは,入力信号が有界であっても,システムの出力信号は発散する.任意の有界な入力 x(t)に対し,出力 y(t)も有界となるシステムを安定であるという.安定ではないシステムを不安定という.システムが安定であるための必要十分条件は,システムのインパルス応答 h(t)が次式を満たすことである.∫ ∞
−∞|h(t)| dt <∞ (5.26)
つまり,システムが安定であるためには,伝達関数のすべての極が s平面の左半面に存在していなければならない.一つでも s平面の右半面に極が存在すると,システムは不安定になる.虚軸上に単純極が存在する場合,その虚部の値に応じた周波数で一定振幅の正弦波(余弦波)を永久に出力し続けることになる.これを発振現象という.伝達関数H(s)の分母多項式と初期状態に依存する G(s)の分母多項式は等しい.つまり,これらは等しい極をもつ.システムが安定ならば,G(s)の成分も収束する波形であり,十分な時間を経た後はゼロになり,初期状態に依存する G(s)I(s)を無視することができる.
極の伝搬 最後に,極のおもしろい性質を紹介する.伝達関数H1(s)をもつシステムの後ろに伝達関数 H2(s)をもつシステムが接続されている場合,システム全体の伝達関数 H(s)は,これらの積
H(s) = H1(s)H2(s)
で表現される.また,伝達関数H1(s)をもつシステムと伝達関数H2(s)をもつシステムが並列に接続されている場合,システム全体の伝達関数H(s)は,これらの和
H(s) = H1(s) +H2(s)
となる.これらのいずれも,H1(s)やH2(s)の極はH(s)でも保存されている,いいかえると,極は和で増えていく.信号 x(t)が伝達関数Hn(s), n = 1, 2, . . . , N をもつシステムを経由していき,y(t)として観測されるとする.極と同じ位置にある零点により打ち消されない限り,y(t)のラプラス変換 Y (s)の極は,最初の入力信号 X(s)と経由してきたシステムの伝達関数Hn(s), n = 1, 2, . . . , N の極のすべてをもっている.つまり,ある信号のラプラス変換の極を調べれば,その信号が作られた歴史を紐解くことが可能になるのである.
5.4 周波数特性
安定で因果的な線形時不変システムに複素指数関数(あるいは余弦波,正弦波)が入力された場合,十分な時間が経った後では,起点をもつ信号成分,つまり過渡応答はゼロになり,入力された複素指数関数の振幅と位相を変化させるだけのはたらきになる.このようなはたらきについて考えてみよう.

72 第 5章 システム
安定で因果的な線形時不変システムに余弦波や正弦波を入力し,十分な時間が経った後にはどのような出力が得られるのだろうか.余弦波や正弦波は,複素平面上に複素共役の関係にある二つの極をもつので,簡単化のため,そのうちの一つの極に対応する複素指数関数x(t) = eiωt を入力する場合を考える.複素指数関数 x(t) = eiωtのラプラス変換は,X(s) = 1/(s− iω)である.システムの伝達関数をH(s)とすると,出力 y(t)の伝達関数は,
Y (s) = H(s)X(s) +G(s)I(s)
=H(s)
s− iω+G(s)I(s) (5.27)
となるが,安定なシステムで十分な時間が経った後なので,右辺第 2項は無視してかまわない.第 1項を部分分数分解すると,入力の極 iωのほかに,伝達関数H(s)の極の成分が現れるが,安定なシステムで十分な時間が経った後では,すべて減衰してしまうので無視してかまわない.すなわち,
Y (s) =A
s− iω, ただし,t� 0 (5.28)
だけが残る.ここで,係数 Aは,式(4.27)より,
A =H(s)
s− iω(s− iω)
∣∣s=iω
= H(s)∣∣s=iω
(5.29)
となる.式(5.28)を逆ラプラス変換することにより,
y(t) = H(s)∣∣s=iω
eiωt, ただし,t� 0 (5.30)
が得られる.式(5.30)において,H(s)|s=iω は,システムのインパルス応答 h(t)のラプラス変換 H(s)
に s = iωとおいたもの,つまりフーリエ変換H(ω)である.H(ω)は時刻 tに無関係で,周波数 ωに依存した複素数である.したがって,2.6節で学んだように,複素指数関数 eiωt を因果的な線形時不変システムに入力した際の出力は,同じ周波数の複素指数関数となるが,振幅は |H(ω)|倍,位相は argH(ω)だけ変化する.H(ω)は,因果的な線形時不変システムに複素指数関数を入力した際の出力の振幅や位相の変化を表しており,周波数伝達関数,あるいは周波数特性,周波数応答などという.また,絶対値 |H(ω)|は振幅特性,利得,ゲイン,偏角 argH(ω)は位相特性,あるいは単に位相という.
例題 5.9
例題 5.8において,システムの極に依存する応答と入力の極に依存する応答を答えよ.ただし,システムは安定,つまり a < 0とする.また,システムの極に依存する応答は,十分な時間が経った後はどのようになるかを答えよ.さらに,周波数特性H(ω)を求めよ.
解答 例題 5.8の式(a)において,右辺第一項−eat
iω − aがシステムの極に依存する応答部分,第二
項eiωt
iω − aが入力の極に依存する応答となる.a < 0なので,第一項は,t → ∞でゼロとなる.周
波数特性は,第二項において複素指数関数 eiωtにかかる係数なので,H(ω) = 1/(iω− a)となる.

5.4 周波数特性 73
例題 5.8,5.9において,式(a)の右辺第二項は,同じ入力が続く限り永続的に現れる成分であることから定常応答という.これに対し,第一項は t = 0で入力が加わったことにより一時的に現れる成分であることから過渡応答という.第 4章では,これを起点をもつ信号とよんだのである.式(5.30)と同様の結果は,直接,フーリエ変換を利用しても導かれる.因果的か否かにかかわらず線形時不変システムでは,入力と出力の関係は,
y(t) =
∫ ∞
−∞h(τ)x(t− τ) dτ (5.31)
と表される.y(t),h(t),x(t)のフーリエ変換をそれぞれ Y (ω),H(ω),X(ω)で表すと,式(5.31)の右辺は畳み込み積分であり,フーリエ変換後は積になるので,
Y (ω) = H(ω)X(ω) (5.32)
となる.X(ω)は入力における周波数 ωの成分量であり,これがH(ω)倍されて,出力 Y (ω)
になることを意味している.H(ω)は複素数なので,H(ω)倍するとは,振幅が |H(ω)|倍,位相が argH(ω)だけ変化することを意味する.信号を周波数成分に分解して表現し,その成分ごとに受ける作用を明らかにすることにより,システムの動作が直観的にわかるようになるのである.安定な線形システムの定常応答においては,入力の各周波数成分の振幅と位相が変化するだけで,新たな周波数成分が増えることは決してない.本書では非線形システムについては扱わないものの,多少でも非線形システムを知っておくと線形システムについても理解が深まるので,一例を紹介する.入力 x(t)に対し,y(t) = x2(t)を出力するシステムは,式(5.5)の条件を満たさないので非線形システムである.仮に,入力が角周波数 1 [rad/s]の余弦波x(t) = cos(t)とすると,倍角の公式により,出力は y(t) = (cos(2t) + 1)/2となり,入力には存在していなかった角周波数 2 [rad/s]の余弦波が新たに出現する.線形システムの場合,このようなことは決して起こらない.
例題 5.10
次式で示されるインパルス応答をもつ因果的線形時不変システムの伝達関数H(s),周波数特性H(ω)を求めよ.また,振幅特性 |H(ω)|の概形を図示せよ.
h(t) =
(1, 0 ≤ t ≤ T
0, そのほか
解答 与えられたインパルス応答 h(t)をラプラス変換の定義式に代入してラプラス変換することにより,伝達関数
H(s) =
Z T
0
1 · e−st dt =1
s(1− esT )
を得る.伝達関数H(s)に s = iωを代入することにより,周波数特性
H(ω) =1
iω(1− eiωT )
を得る.上式の絶対値をとると,

74 第 5章 システム
|H(ω)| = 1
|ω| |1− eiωT |
となる.1/|ω|,|1− eiωT |は,それぞれ図 5.10(a),(b)に示すものとなる.したがって,振幅特性 |H(ω)| は,それらの積になるので,ω → 0での極限に注意すれば,図(c)に示すものとなる.
図 5.10 振幅特性 |H(ω)|の概形
例題 5.11
図 5.11のような電気回路は RC直列回路とよばれ,電気工学で頻出する電気回路の一つである(演習問題 4.4参照).AにvA(t)なる電圧を加えた際,回路に流れる電流を i(t),Bで観測される電圧を vB(t)とすると,これらには次の微分方程式の関係がある.
vA(t) =1
C
Z t
−∞i(τ) dτ +Ri(t)
vB(t) = Ri(t)
vA(t)を入力,vB(t)を出力とし,それらの間の伝達関数H(s)と周波数特性H(ω)を求めよ.さらに,R = 106 [Ω],C = 10−6 [F]として振幅特性 |H(ω)|,位相特性 argH(ω)の概形を描け.
図 5.11 CR回路

5.4 周波数特性 75
解答 問題式をそれぞれラプラス変換し,すべての初期状態に依存する項をゼロとおくと,
VA(s) =
„1
sC+R
«I(s), VB(s) = RI(s)
となる.これらの連立方程式を解くと,伝達関数
H(s) =VB(s)
VA(s)=
R
1/(sC) +R=
1
1 + 1/(sRC)
が得られる.伝達関数に s = iωを代入することにより,周波数特性は,
H(ω) =1
1 + 1/(iωRC)
となる.振幅特性は,
|H(ω)| = 1p1 + 1/(|ω|2R2C2)
であるが,|ω| 1/(RC)ならば |H(ω)| 1,|ω| � 1/(RC)ならば |H(ω)| |ω|RC となる.つまり,|ω| � 1では |ω|,|ω| 1では 1となる.図 5.12(a)に振幅特性を示す.一方,位相特性は,
argH(ω) = arg 1− arg
„1 +
1
iωRC
«
= 0− arg
„1− i
ωRC
«
= − tan−1
„− 1
ωRC
«
= tan−1
„1
ωRC
«
となる(図(b)).
図 5.12 振幅特性 |H(ω)|と位相特性 arg H(ω)の概形
第 5章 ポイント
• 線形時不変システムは,インパルス信号を入力したときの出力,つまりインパルス応答のみを知っていれば,任意の入力に対する出力を求めることができる.• インパルス応答のラプラス変換を伝達関数といい,システムの特性を知るうえで有用である.

76 第 5章 システム
• システムが線形定係数常微分方程式で表現されていて,それをラプラス変換すると,出力は t = 0以降の入力に依存する項と,t = 0での初期状態に依存する項に分けられる.• 出力が入力に依存する項において,出力と入力の比が伝達関数であり,それを逆ラプラス変換すれば,インパルス応答となる.• 伝達関数H(s)の極の実部は,インパルス応答の収束(あるいは発散)の速度,虚部は振動の周波数を表す.• システムが安定であるためには,伝達関数のすべての極が s平面の左半面に存在しなければならない.逆に,伝達関数の極が一つでも右半面に存在するとシステムは不安定になる.• ある信号のラプラス変換の極には,その信号がこれまでに通ってきたシステムの名残がある.• 伝達関数H(s)は,複素数 sの関数であるが,虚軸 s = iωに沿って切り出したものが周波数特性H(ω)である.• システムに入力された信号は,周波数 ωごとに周波数特性H(ω)で規定された量だけ振幅と位相が変化して出力される.
演習問題
5.1 図 5.13に示す電気回路は,RLC直列回路という(演習問題 4.4参照).Aに加えた電圧を vA(t),回路に流れる電流を i(t),Bで観測される電圧を vB(t)とすると,これらには以下に示される関係がある.
vA(t) =1
C
Z t
−∞i(τ) dτ +Ri(t) + Li′(t)
vB(t) = Li′(t)
ただし,i′(t)は,i(t)の導関数である.vA(t)を入力,vB(t)を出力と考えて,以下の問いに答えよ.(5)の解答にはグラフ描画機能付き関数電卓やパソコンなどを利用してもよい.(1)このシステムの伝達関数H(s)を求めよ.(2)このシステムの零点,極を求めよ.(3)このシステムは,L,C,Rの値によって,2次遅れ系,2次振動系,二つの 1次遅れ系の和
になる.これらの系になる条件を求めよ.(4)2次振動系になるときの振動数(周波数)ωc を求めよ.(5)L = 1 [mH],C = 1 [—F]として,Rが 0 Ωから 70 Ωまで変化するときの極,零点の位置
の変化を描け.(6)2次遅れ系となるR,発振を起こすRをそれぞれ求めよ.(7)R = 0.1,15,70 [Ω]での振幅特性,位相特性を描け.
図 5.13 LCR直列回路

77
第 6 章
フィルタ
キーワードボード線図,ナイキスト線図,ゲイン線図,位相線図,遮断周波数,フィルタ,通過域,遮断域,低域通過フィルタ,高域通過フィルタ,帯域通過フィルタ,帯域除去フィルタ,全域通過フィルタ,線形位相性,群遅延,バターワースフィルタ,チェビシェフフィルタ,ベッセルフィルタ
信号を加工するシステムの特殊なものとして,特定の周波数成分を通過,あるいは遮断させるはたらきをするフィルタがある.本章では,フィルタの仕様や特徴を可視化するボード線図,ナイキスト線図の読み方を学び,伝達関数の極と零点からシステムの周波数特性の概形を推測する力を養う.フィルタの種類と特徴,設計法についても学ぶ.
6.1 周波数特性の表現法と解釈
フィルタについて学ぶ前に,基本的なシステムの周波数特性 H(ω),とくにシステムの極や零点と周波数特性の関係について理解しておく必要がある.周波数特性は,周波数を変数とし,複素数をとる関数である.複素数は実部と虚部,あるいは絶対値と偏角の二つの量で表現されるため,その可視化にはやや工夫が必要である.システムの周波数特性の代表的な可視化法を説明する.
ボード線図とナイキスト線図 伝達関数H(s)が実係数をもつ有理多項式で表現できるものとする.このとき,H(s) = H∗(s∗)なる関係がある.周波数特性H(ω)は,伝達関数H(s)にs = iωを代入したものなので,H(ω) = H∗(−ω)となり,振幅特性 |H(ω)|は周波数 ωについて偶関数,位相特性 argH(ω)は奇関数になる.したがって,周波数特性を表現する際には,ω ≥ 0についてのみ示せば十分である.周波数特性を可視化するためには,振幅特性 |H(ω)|と位相特性 argH(ω)を別々にプロットするボード線図と,角周波数 ωを 0から∞まで変化させたときの周波数特性 H(ω)の複素平面上の軌跡を描いたナイキスト線図がよく用いられる.ボード線図において,角周波数ω の関数として振幅特性 |H(ω)|,位相特性 argH(ω)を描いたものをそれぞれゲイン線図,位相線図という.一般的に,ゲイン線図と位相線図では横軸(周波数軸)を対数軸にとり,ゲイン線図では縦軸を利得(ゲイン:gain)といい,デシベル [dB]で表す.基本的なシステムの一つである積分要素 H(s) = 1/sのボード線図,ナイキスト線図をそれぞれ図 6.1に示す.積分要素の周波数特性はH(ω) = 1/(iω) = −i/ω であるから,ω → 0

78 第 6章 フィルタ
図 6.1 積分要素H(s) = 1/sのボード線図(ゲイン線図,位相線図)とナイキスト線図
での利得が無限大で,ω →∞での利得が 0となる.位相は,すべての周波数で複素平面における負の虚軸上にあり 90 [deg]遅れる.これらのことは,ナイキスト線図を描けば一目瞭然である.ナイキスト線図では読み取れず,ゲイン線図でしかわからないこととして,積分要素ではゲイン線図の傾きが−20 [dB/dec]である,つまり周波数が 10倍高くなると利得は−20 [dB]になる(振幅が 1/10倍になる)ことが挙げられる.別のシステムの一例として,微分要素H(s) = sのボード線図,ナイキスト線図を図 6.2に示す.システムの特性H(s)は,それが有理多項式で表現されている場合,分子多項式,分母多項式をそれぞれ因数分解して,
図 6.2 微分要素H(s) = sのボード線図(ゲイン線図,位相線図)とナイキスト線図

6.1 周波数特性の表現法と解釈 79
H(s) = P
M∏k=1
(s− βk)
N∏k=1
(s− αk)
(6.1)
と表現できる.ここで,Hαk(s) = 1/(s− αk)やHβk(s) = (s− βk)を極 αk,零点 βk に対
応する伝達関数ということにする.これらを用いると,式(6.1)は,
H(s) = P
{M∏k=1
Hβk(s)
}{N∏
k=1
Hαk(s)
}(6.2)
と表される.伝達関数H(s)に s = iωを代入すれば周波数特性H(ω)になるからゲイン線図や位相線図は,それぞれ
20 log10 |H(ω)| = 20 log10 P +M∑k=1
20 log10 |Hβk(ω)|+
N∑k=1
20 log10 |Hαk(ω)|
(6.3)
argH(ω) =
M∑k=1
argHβk(ω) +
N∑k=1
argHαk(ω) (6.4)
となる.つまり,それぞれの極 αk や零点 βk に対する周波数特性がわかれば,それらを総和することによりシステム全体の周波数特性を直感的に理解することができる.また,ある極αと同じ位置にある零点 βに対する周波数特性は,ゲイン線図,位相線図では,極 α に対する周波数特性の−1倍,つまり上下反転になる.つまり,周波数特性を理解するための鍵は,さまざまな位置にある極に対する周波数特性を理解することといえる.そこで,次に,極の複素平面上での位置と周波数特性の関係を説明する.
1次系,2次系の周波数伝達関数 極は,分母多項式の根が実根の場合と複素共役根の場合がある.極が実根の場合,1次遅れ系 H(s) = |α|/(s − α)となる.分子の |α|はなくてもよいが,後々の説明を容易にするために付けておく.1次遅れ系 H(s) = |α|/(s − α)のボード線図,ナイキスト線図を図 6.3に示す.ただし,α = −10とした.同様に,2次遅れ系H(s) = |α|2/(s−α)2,α = −10のボード線図とナイキスト線図を図 6.4に示す.さらに,2
次振動系H(s) = |α|2/((s− α)(s− α∗))において,α = 10ei5π/6と α = 10ei5π/9の場合のボード線図とナイキスト線図を図 6.5,6.6に示す.図 6.3~6.6に示したシステムの極の位置を図 6.7(a)~(d)にまとめた.これらは,いずれも半径 10の円周上に極をもつ.図(a)の1次遅れ系の場合,負の実軸に 1位の極があり,図(b)の 2次遅れ系の場合,負の実軸に 2位の極がある.2次振動系では,図(c)より図(d)のほうがより虚軸に近いところに極がある.図 6.3~6.6より,これらのシステムでは,ω < 10ではおおよそ |H(ω)| = 1となっていることから,入力された信号の 10 [rad/s]以下の周波数成分は,振幅を変化させずに出力されることがわかる.一方,入力された信号の 10 [rad/s]以上の周波数成分は,周波数が高いほど振幅が抑えられて出力される.つまり,このシステムは,入力された信号のある一定周波数以下の周波数成分はよく通すが,それ以上の周波数成分は通しにくくする作用をもつことがわかる.この閾値にあたる周波数を遮断周波数,もしくはカットオフ周波数という.

80 第 6章 フィルタ
図 6.3 1次遅れ系H(s) = |α|/(s− α),α = −10のボード線図(ゲイン線図,位相線図)とナイキスト線図
図 6.4 2次遅れ系H(s) = |α|2/(s − α)2,α = −10のボード線図(ゲイン線図,位相線図)とナイキスト線図
図 6.3~6.6をもっと詳細にみていこう.まず,ゲイン線図より,1次遅れ系では,遮断周波数以上での角周波数 ωに対する利得の傾きは−20 [dB/dec]となる.一方,2次(遅れ・振動)系では,−40 [dB/dec]となる.このことは,1次系より 2次系のほうがより急峻に遮断することを意味する.一般的に,極一つあたり−20 [dB]の減衰特性が得られる.また,2次系では,極が実軸に近づくと遮断周波数付近で正の利得をもつ,いいかえると,入力を増幅するはたらきをもつようになる.実軸に近い極は,遮断周波数付近で正の利得をもつようになり,実軸に近づくにつれて発振気味になる.次に,位相線図より,1次遅れ系では ω = 0では位相は 0 [deg]であるが,ω →∞で最大

6.1 周波数特性の表現法と解釈 81
図 6.5 2次振動系H(s) = |α|2/((s−α)(s−α∗)),α = 10ei5π/6
のボード線図(ゲイン線図,位相線図)とナイキスト線図
図 6.6 2次振動系H(s) = |α|2/((s−α)(s−α∗)),α = 10ei5π/9
のボード線図(ゲイン線図,位相線図)とナイキスト線図
図 6.7 図 6.3~6.6に示したシステムの s平面上の極の配置

82 第 6章 フィルタ
90 [deg]まで位相が遅れる.一方,2次(遅れ・振動)系では最大 180 [deg]まで位相が遅れる.このことは,ナイキスト線図では,1次遅れ系では ω →∞の極限で負の虚軸,つまり−iπ/2から 0に接近し,2次(遅れ・振動)系では負の実軸,つまり −πから 0に接近することを意味する.一般的に,N 個の極があると,位相は最大でNπ/2 [rad]だけ遅れる.零点 β = −10に対するH(s) = (s− β)/|β|のボード線図とナイキスト線図を図 6.8に,零点 β = 10ei5π/9 に対するH(s) = ((s− β)(s− β∗))/|β|2 のボード線図とナイキスト線図を図 6.9に示す.零点のゲイン線図,位相線図は同じ位置にある極に対するそれぞれの上下反転となるので,図 6.8,6.9に示したゲイン線図,位相線図は,図 6.3,6.6に示したもののそ
図 6.8 零点 β = −10に対するH(s) = (s−β)/|β|のボード線図(ゲイン線図,位相線図)とナイキスト線図
図 6.9 零点 β = 10ei5π/9に対するH(s) = ((s−β)(s−β∗))/|β|2のボード線図(ゲイン線図,位相線図)とナイキスト線図

6.1 周波数特性の表現法と解釈 83
れぞれの上下反転になっている.一般に,N 個の零点があると,位相は最大で Nπ/2 [rad]
だけ進むことになる.
一般的なシステムの周波数特性 式(6.3),(6.4)に示したように,システムの伝達関数が複数の極,零点をもつ場合,個々の極,零点に対するゲイン線図,位相線図の和として,システム全体のゲイン線図,あるいは位相線図が求められる.次の例題を通して,一般的なシステムのボート線図の描き方を学ぼう.
例題 6.1
伝達関数H(s)が次式で示される二つのシステムのボード線図の概形を描け.
H(s) =|α1||α2|2
(s− α1)(s− α2)(s− α∗2)
(a)
ただし,α1 = −1, α2 = 100ei5π/6
H(s) =|α1|2|α2|(s− β1)
|β1|(s− α1)(s− α∗1)(s− α2)
(b)
ただし,α1 = ei3π/4, α2 = −100, β1 = −10
これら二つのシステムの極と零点の配置をそれぞれ図 6.10(a),(b)に示す.ただし,図中,×,◦は,それぞれ極,零点を表す.
図 6.10
解答 まず,式(a)で示される伝達関数H(s)をもつシステムにおいて,s = −1にある極によるボード線図を図 6.11の上段に示す.遮断周波数は 1 [rad/s]であり,−20 [dB/dec]で減衰し,位相は最大 90 [deg]まで遅れる.同様に,s = 100e±i5π/6 にある複素共役極によるボード線図を図の中段に示す.遮断周波数は 102 [rad/s]であり,−40 [dB/dec]で減衰し,位相は最大 180 [deg]
まで遅れる.システム全体のボード線図は,それぞれの極のボード線図の和をとったものとなる.システム全体のボード線図を図の下段に示す.次に,式(b)で示される伝達関数H(s)をもつシステムにおいて,s = e±i3π/4 にある複素共役
極によるボード線図を図 6.12の上段に示す.遮断周波数は 1 [rad/s]であり,−40 [dB/dec]で減衰し,位相は最大 180 [deg]まで遅れる.同様に,s = −10にある零点によるボード線図を図の2段目に示す.遮断周波数は 10 [rad/s]であり,20 [dB/dec]で増幅し,位相は最大 90 [deg]まで進む.さらに,s = −100にある極によるボード線図を図の 3段目に示す.遮断周波数は 100
[rad/s]であり,−20 [dB/dec]で減衰し,位相は最大 90 [deg]まで遅れる.システム全体のボード線図は,それぞれの極と零点のボード線図の和をとったものとなる.システム全体のボード線図を図の最下段に示す.

84 第 6章 フィルタ
図 6.11 例題 6.1中の式(a)のボード線図の概形
図 6.12 例題 6.1中の式(b)のボード線図の概形
さて,これらのシステムの実際のボード線図を図 6.13に示す.算出されたボード線図の概形を滑らかにしたもの(図 6.11の 3段目と図 6.13(a),図 6.12の 3段目と図 6.13(b)がそれぞれ対応)になっていることがわかるだろう.

6.2 フィルタ 85
図 6.13 例題 6.1で示されるシステムの実際のボード線図
6.2 フィルタ
前節で学んだように,システムは,周波数により,その成分の通しやすさが異なる.そのため,特定の周波数のみを通す,あるいは遮断するようにシステムを設計することもできる.このようなシステムをフィルタという.フィルタについて考えてみよう.図 6.14に示すように,通過させる周波数帯域を通過域,遮断する周波数帯域を遮断域,それらの境界の周波数を遮断周波数(あるいはカットオフ周波数)という.低い周波数成分のみを通すフィルタを低域通過フィルタ(LPF),高い周波数成分のみを通すフィルタを高域通過フィルタ(HPF),特定の周波数帯域の成分のみを通すフィルタを帯域通過フィルタ(BPF),特定の周波数帯域の成分のみを遮断するフィルタを帯域除去フィルタ(BEF)という.また,特殊なフィルタとして全帯域を通すが位相を変化させる全域通過フィルタ(APF)がある.位相特性について理解を深めるために,先に全域通過フィルタを説明する.インパルス応答が
h(t) = δ(t− τ)
となるフィルタの周波数特性は,デルタ関数 δ(t)のフーリエ変換が 1であること,τ だけ時間軸推移させた信号のフーリエ変換は eiτω が乗じられることから,
H(ω) = eiτω
となる.振幅特性,位相特性は,それぞれ

86 第 6章 フィルタ
図 6.14 フィルタのタイプ
|H(ω)| = 1, argH(ω) = τω
となる.振幅特性がすべての ωで一定値なのでこのフィルタは全域通過フィルタの一つである.位相特性は,argH(ω) = τωなので周波数 ωに比例している.位相特性が周波数に比例する性質を線形位相性,あるいは直線位相性という.全域通過フィルタであっても線形位相性をもたない場合の一例を示す.図 6.15(a)に示す信号を線形位相性をもつ全域通過フィルタ(argH(ω) = −0.1ω)に作用させたときの結果を図(b)に示す.波形が変化せず,0.1 [s]だけ遅れていることがわかる.同様に,位相が周波数の平方根に比例する全域通過フィルタ(argH(ω) = −0.1√ω)に作用させたときの結果を図(c)に示す.この場合,波形に変化を与え歪んでいることがわかる.位相特性 argH(ω)を周波数 ωで除したものを群遅延 d(ω) = argH(ω)/ω [s]という.これは,周波数 ωでの時間軸シフト量を表す.線形位相性をもつフィルタでは,群遅延は周波数によらず一定値となる.
図 6.15 線形位相性の説明図
6.3 フィルタの代表的な型 87
ここで,フィルタに望まれる性質を考える.理想的なフィルタは,
1. 通過域では,振幅特性 |H(ω)| = 1
2. 遮断域では,振幅特性 |H(ω)| = 0
となることであるが,実は,これらの条件を満たす因果的線形時不変システム(フィルタ)は存在しない.なぜだろうか.1,2の条件は,振幅特性 |H(ω)|が矩形である,つまり遮断特性が −∞ [dB/dec]となることを意味する.矩形の振幅特性をもつフィルタのインパルス応答はシンク関数であるが,シンク関数は無限の時刻に広がっているため,因果律を満たすことができないのである.そこで,有限の時間で打ち切ると,特性が −∞ [dB/dec]とはならなくなる.さらに,波形の変形を防ぐためには,上の条件に加え,
3. 通過域では,線形位相性をもつ
ことが望まれる.フィルタは,これらの条件のトレードオフのもとで,用途に応じた特性をもつようにさまざまに設計されることになる.頻繁に用いられる代表的なフィルタとしては,バターワース,チェビシェフ,ベッセル,楕円関数フィルタ,およびこれらを修正したものなどがある.簡単に紹介する.
6.3 フィルタの代表的な型
これまでさまざまなフィルタが設計されてきたが,基本となるのはバターワース型,チェビシェフ型,ベッセル型である.これらのフィルタの型について,s平面上の極の位置,伝達関数,周波数特性の立場から説明していこう.
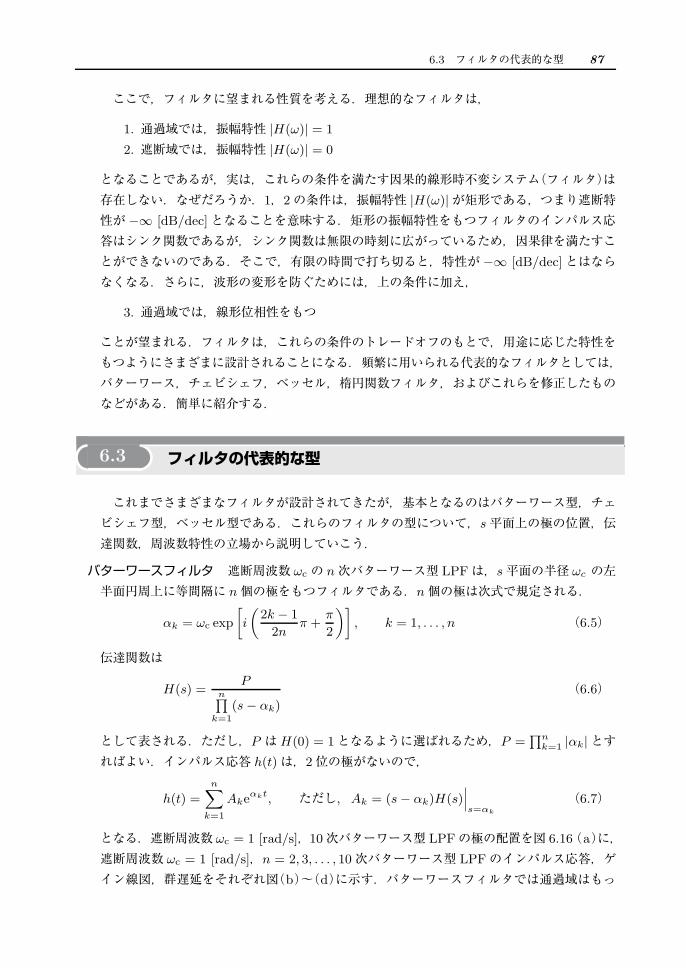
バターワースフィルタ 遮断周波数 ωc の n次バターワース型 LPFは,s平面の半径 ωc の左半面円周上に等間隔に n個の極をもつフィルタである.n個の極は次式で規定される.
αk = ωc exp
[i
(2k − 1
2nπ +
π
2
)], k = 1, . . . , n (6.5)
伝達関数は
H(s) =P
n∏k=1
(s− αk)(6.6)
として表される.ただし,P はH(0) = 1となるように選ばれるため,P =∏n
k=1 |αk|とすればよい.インパルス応答 h(t)は,2位の極がないので,
h(t) =
n∑k=1
Akeαkt, ただし, Ak = (s− αk)H(s)
∣∣∣s=αk
(6.7)
となる.遮断周波数 ωc = 1 [rad/s],10次バターワース型 LPFの極の配置を図 6.16(a)に,遮断周波数 ωc = 1 [rad/s],n = 2, 3, . . . , 10次バターワース型 LPFのインパルス応答,ゲイン線図,群遅延をそれぞれ図(b)~(d)に示す.バターワースフィルタでは通過域はもっ

88 第 6章 フィルタ
図 6.16 バターワース型 LPFの各種特性
とも平坦な振幅特性をもち,減衰の速度は−20n [dB/dec]となる.群遅延も通過域である程度一定であり,振幅特性と位相特性のバランスがもっともよいフィルタである.一般的な用途では,このバターワースフィルタが用いられることが多い.
チェビシェフフィルタ バターワースフィルタの極の実部に 1未満の定数を乗じることによって虚軸方向に移動させると,チェビシェフフィルタが得られる.具体的には,式(6.7)で表される極 αk の実部を次式で置き換えることにより得られる.
Re(αk)← Re(αk) sinh
(1
nsinh−1
(1√
10Rip/5 − 1
))(6.8)
ここで,Ripは,リップルの振幅 [dB]を制御するパラメータであるが,リップルについては後述する.伝達関数H(s),インパルス応答 h(t)は,バターワースフィルタと同様に式(6.6),(6.7)で与えられる.ただし,P は,|H(ωc)| = 1/
√2となるように選ばれる.遮断周波数
ωc = 1 [rad/s],10次チェビシェフ型 LPFの極の配置を図 6.17(a)に,遮断周波数 ωc = 1
[rad/s],n = 2, 3, . . . , 10次チェビシェフ型 LPFのインパルス応答,ゲイン線図,群遅延をそれぞれ図(b)~(d)に示す.図 6.16と図 6.17の図を比較すればわかるように,チェビシェフフィルタは,バターワースフィルタより速い速度で遮断域に移行する.その代わり,通過域の振幅特性は平坦にはならず,リップルという波打つ特性となる.さらに,群遅延も一定ではなく,波形の乱れも大きい.したがって,チェビシェフフィルタは,急峻な遮断特性が必要な用途で用いられる.ここで述べたチェビシェフフィルタは,正確にはチェビシェフⅠ型フィルタといい,通過域でリップルをもつ.通過域で平坦な振幅特性をもち,遮断域でリップルをもたせたチェビシェフフィルタをチェビシェフⅡ型フィルタという.通過域,遮断域ともにリップル特性を

6.3 フィルタの代表的な型 89
図 6.17 チェビシェフ型 LPFの各種特性
図 6.18 ベッセル型 LPFの各種特性
もたせ,より急峻な遮断特性をもたせたチェビシェフフィルタを楕円関数フィルタという.
ベッセルフィルタ 遮断周波数 ωcの n次ベッセル型 LPFの極は,s平面の一定の半径の円の左半面円周上にあり,虚部は等間隔である.具体的には,次式で表される位置に n個の極をもつ.

90 第 6章 フィルタ
αk = R(− cos(sin−1(pk)) + ipk), k = 1, 2, . . . , n (6.9)
ただし, pk =1− 2k
n+ 1
伝達関数H(s),インパルス応答 h(t)は,バターワースフィルタ,チェビシェフフィルタと同様に式(6.6),(6.7)で与えられる.ただし,R,P は,|H(0)| = 1を満たすように選ばれる.遮断周波数 ωc = 1 [rad/s],10次ベッセル型 LPFの極の配置を図 6.18(a),遮断周波数 ωcS = 1 [rad/s],n = 2, 3, . . . , 10次ベッセル型 LPFのインパルス応答,ゲイン線図,群遅延をそれぞれ図(b)~(d)に示す.ベッセルフィルタは,遮断域への移行が遅い反面,通過域の群遅延がほぼ一定となっている.そのため,ベッセルフィルタは,波形の変形を避けなければならない用途に用いられる.
6.4 LPFから HPF,BPF,BEFへの変換
前節では,フィルタの代表的な型について説明したが,その際,低域通過フィルタ(LPF)のみを扱った.それは,設計した LPFから,高域通過フィルタ(HPF),帯域通過フィルタ(BPF),帯域遮断フィルタ(BEF)などへ容易に変換できるからである.この変換法について説明する.
HPFの設計 HPF,BPF,BEFは,LPFから適当な変換を行うことにより設計できる.たとえば,図 6.19(a)に示す−20 [dB/dec]の減衰特性をもつ LPFのゲイン線図に図(b)に示す微分要素のゲイン線図を加えると,図(c)に示す HPFのゲイン線図が得られる.微分要素は原点に 1個の零点をもつから,HPFは,LPFの極の数に等しい零点を原点に付加することによりつくることができる.n次のバターワースフィルタの場合,その伝達関数に sn
を乗じれば HPFとなる.つくられる HPFの遮断周波数は,元の LPFの遮断周波数に等し
図 6.19 LPFから HPFのゲイン線図をつくる

情報工学レクチャーシリーズ信号処理の基礎 © 横田康成 2013
2013 年 4 月 24 日 第 1 版第 1 刷発行 【本書の無断転載を禁ず】
著 者 横田康成発 行 者 森北博巳発 行 所 森北出版株式会社
東京都千代田区富士見 1-4-11(〒 102-0071)電話 03-3265-8341 / FAX 03-3264-8709http://www.morikita.co.jp/日本書籍出版協会・自然科学書協会・工学書協会 会員 <(社)出版者著作権管理機構 委託出版物>
落丁・乱丁本はお取替えいたします.
Printed in Japan/ ISBN978-4-627-81051-8
著 者 略 歴横田 康成(よこた・やすなり)1989 年 豊橋技術科学大学工学部情報工学課程卒業1991 年 豊橋技術科学大学大学院工学研究科情報工学専攻修士課程修了1994 年 豊橋技術科学大学大学院工学研究科システム情報工学専攻博士後期課程修了1994 年 名古屋工業大学工学部電気情報工学科助手1996 年 岐阜大学工学部電子情報工学科講師1998 年 岐阜大学工学部電子情報工学科助教授2007 年 岐阜大学工学部応用情報学科准教授2011 年 岐阜大学工学部応用情報学科教授 現在に至る 博士(工学) 研究分野 信号処理,画像処理,情報理論,生体信号解析
編集担当 加藤義之(森北出版)編集責任 水垣偉三夫(森北出版)組 版 アベリー印 刷 シナノ印刷製 本 同





























