Embed Size (px)
Citation preview

技
术
创
新
中 文 核 心 期 刊《微 计 算 机 信 息 》(嵌 入 式 与 SOC )2007 年 第 23 卷 第 1-2 期
360元 / 年 邮局订阅号 : 82-946 《 现场总线技术应用 200 例》
机 器 人 技 术
模块化机器人的惯性参数辨识研究On Inertia l Param eter Iden tifica tion of Module Robots
(北京工业大学)黄用华 余跃庆 苏丽颖 杨建新HUANG YONGHUA YU YUEQING SU LIYING YANG JIANXIN
摘要:提 出 了 一 种 基 于 六 维 力 /力 矩 传 感 器 的 模 块 化 机 器 人 惯 性 参 数 辨 识 的 方 法 。首 先 , 通 过 Newton- Euler 方 程 建 立 模 块 化 机
器 人 的 动 力 学 方 程 , 然 后 利 用 基 座 力 旋 量 平 衡 原 理 建 立 辨 识 模 型 对 动 力 学 方 程 中 的 未 知 参 数 进 行 辨 识 , 最 后 以 德 国 AMTEC公 司 生 产 的 PowerCube 模 块 化 机 器 人 实 体 对 这 种 方 法 进 行 了 实 验 验 证 。
关键词:模块化机器人;惯性参数;六维力/力矩传感器;辩识
中图分类号:TP242 文献标识码:A
Abstract:A method is proposed to estimate inertial parameter of module robot based on six- axis force/torque sensor.Firstly,dynamicequation of module robots is developed via Newton - Euler equation.Secondly,identification model for unknown parameters of dynamicequation is proposed according to force twist equilibrium of the robot base. Finally,an experiment study has been presented on Power-Cube robot to testify this approach.Key words:Module robot,Iner tial parameter ,Six- axis force/torque sensor ,Identification
文章编号:1008- 0570(2007)01- 2- 0266- 03
引言
模块化机器人是一种由各种模块组成的、能够方便组装和
拆卸的机器人。相对于传统机器人而言 , 模块化机器人因其构
型的多样性、对复杂环境的适应性等优点而受到普遍关注。从
目前国内外对模块化机器人的研究成果来看 , 大多数研究集中
在运动学方面 , 而对其动力学方面则涉及不多。其重要原因是
因为机器人缺少力信息反馈 , 动力学研究难以实现。
本文引入六维力/力矩传感器实时测量机器人基座受力 , 从
用 Newton- Euler 方程建立模块化机器人动力学模型出发 , 提出
一种基于六维力/力矩传感器及关节码盘信息在不解体机器人
的情况下对模块化机器人的惯性参数进行辩识的方法 , 并用该
方法在德国 AMTEC 公司生产的 PowerCube 模块化机器人进行
了实验验证。
1 动力学建模
建 立 机 器 人 动 力 学 模 型 通 常 有 两 种 方 法 , 一 种 是 用 La-
grange 方程进行建模 ; 另一种则是用 Newto1n- Euler 方程进行建
模。与前者相比 , 后者为递推形式的模型 , 计算量较小 , 有利于
实时控 制 , 因 此 , 本 文 采 用 Newton- Euler 方 程 对 模块 化 机 器人
进行动力学建模。
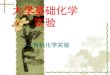
如图 1, n 关节串联模块化机器人的基座安装 在 六 维力 /力
矩传感器上的 , 其中 , ws、w1 和 wn 分别表示六维力/力矩传感器、
第 1 连杆和第 n 连杆受到的力旋量。
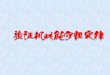
如图 2, 取机器人的第杆 进 行 受力 分 析 , 根据 D- H 坐 标 建
立法 , 杆 i 两端分别有 i- 1 系及 i 系 , oi- 1 及 oi 分别为两系的原
点 ; 杆 i- 1 作用在杆的力系可向 oi- 1 点简化为一个力和一个力
矩 , 分别记为 fi 及 ni, mig 为杆 i 所受的重力。
图 1 n 关节模块化机器人结构图
图 2 机器人第 i 杆受力分析
根据 Newton- Euler 方 程可 以 导 出 以 下 机 器 人 动 力 学 方 程
递推算法 :
(1)
(2)
(3)
(4)
(5)
黄用华:硕士研究生
国 家 自 然 科 学 基 金 项 目 ( 50575002) 和 北 京 市 自 然 科 学 基 金
项目( 3062004) 资助
( )������������ rmrmamF ~~~~~~~ ××+×+= ωωε( ) ( ){����������������� rmparmpmIIN ~~~~~~~~~~~~ +××+×++×+= ∗∗∗ εωωε
( )[ ]}����� rm ~~~ ×× ωω
( ) ( )0~,~~ ��� =+= −− ωσωω ������ qzR �( )[ ] ( )0~,~~~ ���� =+×+= −−− εωσεε �������� qzqzR ���
( ) ( ) ( ) ( )gaqzRppqzaRa ���������������� −=×+××+×++= −∗∗
−− ���� ~,~2~~~~~~~ ��� ωσωωεσ
266- -

邮局订阅号 : 82-946 360 元 / 年
技
术
创
新
机 器 人 技 术
《 PLC 技术应用 200 例》
您 的 论 文 得 到 两 院 院 士 关 注
(6)
(7)
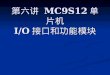
在上述算法中 , 各量均在机器人随动坐标系中表示。为了
便于编程实现 , 将上述递推算法写成计算流程框图 3 形式 :
图 3 动力学模型计算框图
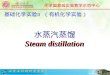
图 4 7 自由度可重构模块化机器人
由力旋量的定义可知:
(8)
根据上述递推 算 法建 立 的 动力 学 模 型 , 可 以 将 力旋 量 w1
分解为两个矩阵的乘积 :
(9)
其中 : U 是 一个 由 机 器人 运 动 学参 数 ( 杆 长 、扭 角 等 ) 及 关
节运动变量 ( 关节位置、速度、加速度 ) 确定的矩阵 ; ф表示所有
连杆的惯性参数组成的向量。对第 i 杆 , 其 10 个惯性参数可以
表示为一个向量 :
(10)
由式( 9) 可知, w1 与机器人的惯性参数 ф成线形关系。从原
理上来说, n 杆机器人的惯性参数共有 10n 个, 但由于( 9) 式中的
U 矩阵通常不满足列满秩的条件, 所以并非( 10) 式中的每一项都
能单独辨识出来, 有些辨识出来的可能只是几项的线性组合项。
2 辩识原理
在图 1 中 , 机器人共有个连杆 , 其中杆 0 为基座 , 杆 n 为末
端杆 ; 六维力 /力 矩 传感 器 的 测量 值 记 为 ws,作 用 在 关节 1 处 的
力螺旋记为 w1。根据基座受力平衡可知 :
(11)
在上式中 , Ts 为一个力变换矩阵。对照( 9) 式和( 10) 式可以
得到 :
(12)
记:
(13)
则( 11) 式可以改写为 :
(14)
分 别 对 六 维 力 /力 矩 及 关 节 码 盘 信 息 进 行 N 次 采 样 , 则
( 13) 式可扩展为 :
(15)
其中 :
根据( 7) 式 , 向量 ф可以用最小二乘法计算出来 :
(16)
3 实验验证
实验设备由德国一台 AMTEC 公司生产的 PowerCube 模块
化机器人( 如图 4 所示) 、一个中国科学院合肥智能机械研究所
生 产 的 六维 力 /力 矩传 感 器 及两 台 PC 机 ( 一 台 机 器 人 控 制 终
端 , 一台力/力矩传感器信号采集终端) 组成。实验时 , 通过机器
人 控 制 终 端 控 制 作 用 使 机 器 人 第 2 关 节 按 一 定 轨 迹 转 动 45
度 , 第 4 关节转动- 45 度 , 同时同步采集关节运动位置、速度信
息及六维力/力矩传感器力和力矩信息。
图 5 关节位置曲线
图 6 六维力/力矩传感器测量曲线
采用 前 面提 到 的 动力 学 建 模方 法 , 并 对可 辨 识 项 进 行 分
( )0~
,~~~ ��� =+= +++������ ffRFf
,~~~~~ ���� ++
∗++
∗ ×++= ��������� fRpnRNn ( )0~~ �� == ++ �� nf
= ��� ~
~
n
fw
φUn
fw =
= ��� ~
~
[ ]��������������������� ������ IIIIIIzmymxmm=φ
��wTw =�φUTw �� �−=
UTY �� �−=
φ�� Yw =
φ�YW =
=
)(
)2(
)1(
Nw
w
w
W ���� �
=
)(
)2(
)1(
NY
Y
Y
Y ���� �
[ ] WYYY �� �� −=φ
267- -

技
术
创
新
中 文 核 心 期 刊《微 计 算 机 信 息 》(嵌 入 式 与 SOC )2007 年 第 23 卷 第 1-2 期
360元 / 年 邮局订阅号 : 82-946 《 现场总线技术应用 200 例》
机 器 人 技 术
离 , 可以得出在本实验条件下需要辨识的机器人惯性参数共有
14 项 , 具体如下 :
由于实验测得的数据包含有噪声 , 故先将测得的原始数据
进行相应的低通滤波处理 , 得到处理后的低频数据 ( 如图 5、图
6) , 然 后 再 将这 些 数 据代 入 到 辨识 模 型 ( 16) 式中 计 算 , 最 后 得
出辨识结果为 :
4 结论
本文提出了基于六维力/力矩传感器的模块化机器 人 惯 性
参数辨识方法。这种方法不需要了解关节摩擦和驱动力学的精
确模型 , 无需 在 每 个关 节 安 装力 传 感 器 , 有 效 地 解决 了 不 具有
力反馈的模块化机器人惯性参数辨识问题。同时 , 由 Newton-
Euler 方程递推算法推导出的辨识模型也适合于模块化搭建的
思想 , 并易于在软件上实现。
本文作者创新点 :
引入六维力/力矩传感器安装在机器人基座对 模块 化 机 器
人的动力学特性进行有效的研究 , 为无关节力反馈的模块化机
器人动力学控制开创了新思路。
参考文献:[1]Guangjun Liu,K.Iagnemma,S.Dubowsky,et al.A base force/torquesensor approach to robot manipulator inertial parameter estimation[A].IEEE International conference on Robotics and Automation [C],1998,4: 3316~3321.[2]Hollerbach J M.A recursive Lagrangian formulation of manipu-lator dynamics and a comparative study of dynamics formulationcomplexity.IEEE Trans.On systems,Man and Cybernetics,1980,10:
730~736.[3]Luh J Y S,Walker M W.Paul R P C.Online computationalscheme for mechanical manipulators.ASME J.of Dynamic Systems,Measurement and Control, 1980, 102: 69~76.[4]Khalil W,Kleinfinger J F,Gautier M.Reducing the computationalburden of the dynamic model of robots, In Proceedings of the 1986IEEE Int. Conf. on Robotics and Automation, 525~531.[5]杨钰.一种高速同步数据采集系统的设计与实现[J].微计算机
信息,2005,10- 1:108- 110.
作者简介:黄用华 , 男 , 1977 年生。硕士研究生 , 主要研究方向为
机器 人 动力 学 ,[email protected]。 余 跃 庆 , 男 , 1958
年生。北京工业大学机电学院教授、博士生导师 , 主要研究方向
为机器人技术。苏丽颖 , 女 , 1975 年生 , 博士。杨建新 , 男 , 1977
年生 , 博士后。
Biography:Huang Yonghua,male,born in 1977.Master,majored inrobotic dynamics.
(100022 北京 市 北京 工 业 大学 机 械 工程 与 应 用 电 子 技 术 学 院 )
黄用华 余跃庆 苏丽颖 杨建新
(College of Mechanical Engineer ing and Applied ElectronicTechnology,Beijing University of Technology,Beijing 100022)Huang Yonghua Yu Yueqing Su Liying Yang J ianxing
通讯 地 址:(100022 北 京 市 朝 阳 区 平 乐 园 100 号 北 京 工 业 大 学
机电学院机器人实验室)黄用华
(收稿日期:2006.9.25)(修稿日期:2006.10.22)
(上接第 245 页)
{
printf ("nSTATUS = 0 while transmitting data.\n");
return - 1;
}
for (i = 0; i < nbytes; i++)
xmit_byte (data[i]);
}
for (i = 0; i < 10000 && ! pioc_in (CONF_DONE); i++)
{
if (! pioc_in (nSTATUS))
{
printf ("nSTATUS = 0 while transmitting data.\n");
return - 1;
}
pioc_out_0 (DATA0);
pioc_out_0 (DCLK);
pioc_out_1 (DCLK);
}
if (i == 10000)
{
printf ("Timeout waiting for CONF_DONE = 1.\n");
return - 1;
}
return 0;
}
4 结论
本文给出了基于 ARM 的 FPGA 加载配置软件实现。这种
方法充分利用了 ARM 的速度快、灵活的特点 , 节省了开发成
本 , 又满足了一些特殊的系统设计要求。本方法也适用于其它
的微处理器。
本文作者创新点 : 用 ARM9 来配置 FPGA 可编程逻辑器件
并给出了在 Linux 下的完整的实现程序。
参考文献:
[1]王诚,吴继华,范丽珍,薛宁,薛小宁.Altera FPGA/CPLD 设计
(基础篇) 人民邮电出版社 2005.7 PP187~190.
[2]王艳,李秀华.基于单片机的现场可编程门阵列的配置[J].微计
算机信息,2005,13,104- 105.
作者简介:葛立明 (1977- ), 男 , 吉林四平人 , 硕士研究生 , 主要研
究方向: 智能控制系统 , E- mail:[email protected]。范多旺 教
授 博士生导师 , 兰州交通大学光电技术与智能控制教育部重
点实验室主任;陈光武,讲师,兰州交通大学自动控制研究所。
Biography:Ge Liming Male May/1977 Si - Ping city of Jilin
province .The study and deign of Intelligent control system.
(730070 兰 州 交 通 大 学 光 电 技 术 与 智 能 控 制 教 育 部 重 点 实 验
室)葛立明 范多旺 陈光武
通讯地址:(730070 兰州交通大学 508# 信箱)葛立明
(收稿日期:2006.9.25)(修稿日期:2006.10.22)
[]�0021.03626.05831.02188.01079.00421.0
0210.00025.00242.00898.20783.02434.10927.06988.1
−−−
−−−=φ
268- -