Embed Size (px)
Citation preview
SVEUCILIŠTE U ZAGREBUFAKULTET ELEKTROTEHNIKE I RACUNARSTVA
DIPLOMSKI RAD br. 1598
Optimalno upravljanjevjetroagregatom podržanomjerenjima LIDAR senzora
Matko Kušenic
Zagreb, srpanj 2017.


Zahvaljujem se mentoru prof. dr. sc. Mati Baoticu na brižnom mentorstvu na
završnim godinama studija i Nikoli Huri, neposrednom voditelju, na strpljenju, uloženom
vremenu i pomoci prilikom izrade ovog rada.
iii
SADRŽAJ
1. Uvod 1
2. Sustav upravljanja vjetroagregatom 4
3. Simulacijsko okruženje 7
4. Modeliranje vjetroagregata 84.1. Kvazistaticki model vjetroagregata . . . . . . . . . . . . . . . . . . . 8
4.1.1. Aerodinamicki model vjetroagregata . . . . . . . . . . . . . . 8
4.1.2. Dinamicki model brzine vrtnje rotora . . . . . . . . . . . . . 9
4.1.3. Dinamicki model njihanja tornja . . . . . . . . . . . . . . . . 9
4.1.4. Dinamicki model njihanja lopatica . . . . . . . . . . . . . . . 10
4.1.5. Model aktuatora . . . . . . . . . . . . . . . . . . . . . . . . 11
4.2. Parametri modela vjetroagregata . . . . . . . . . . . . . . . . . . . . 12
4.3. Linearizacija modela u aerolasticnom simulatoru . . . . . . . . . . . 12
5. Predikcija efektivne brzine vjetra na rotoru vjetroagregata 145.1. Mjerenje brzine vjetra LIDAR senzorom . . . . . . . . . . . . . . . . 14
5.1.1. LIDAR sustavi . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.1.2. Odabir konfiguracije LIDAR senzora . . . . . . . . . . . . . . 16
5.2. Identifikacija prijenosne funkcije vjetra . . . . . . . . . . . . . . . . 17
6. Sinteza modelskog prediktivnog regulatora 226.1. Korištenje modela vjetroagregata i mjerenja LIDAR senzora u svrhu
modelskog prediktivnog upravljanja . . . . . . . . . . . . . . . . . . 22
6.2. Oblikovanje problema . . . . . . . . . . . . . . . . . . . . . . . . . . 23
6.2.1. Kriterijska funkcija . . . . . . . . . . . . . . . . . . . . . . . 23
6.2.2. Ogranicenja sustava upravljanja . . . . . . . . . . . . . . . . 25
6.3. Implementacija modelskog prediktivnog regulatora u Simulink okruženju 25
iv
7. Rezultati 27
8. Zakljucak 30
Literatura 31
A. Simulacija LIDAR senzora pomocu FAST-a i Simulink-a 32
v
1. Uvod
Vjetroagregat je dinamicki sustav za pretvorbu kineticke energije vjetra u elek-
tricnu energiju. Vjetar uzrokuje vrtnju rotora vjetroagregata koja se prenosi do gene-
ratora u kojem se odvija pretvorba energije. Iskorištavanje energije vjetra u svrhu
proizvodnje elektricne energije raste ubrzano u posljednjem desetljecu kao poslje-
dica sve veceg interesa za obnovljivim izvorima energije. Prema podacima udruže-
nja WindEurope, elektricna energija dobivena iz vjetra zadovoljava 11% potražnje za
elektricnom energijom u Europskoj Uniji, s tim da je taj broj u nekim državama puno
veci (Danska 42%; Španjolska 20%; Njemacka 13%). Prošle godine (2016.) insta-
lirano je mnogo novih vjetroagregata ukupne snage 12.5 GW, što bi znacilo da je u
Europi ukupna snaga instaliranih vjetroagregata 153.7 GW, što zauzima drugo mjesto
u poretku europskih kapaciteta za proizvodnju elektricne energije.
Vjetar je, za razliku od fosilnih goriva, besplatan i sam vjetroagregat je jedini tro-
šak pri proizvodnji elektricne energije iz energije vjetra. Kako bi se dobivanje energije
iz vjetra moglo natjecati s tradicionalnim dobivanjem elektricne energije iz fosilnih
goriva, ali i iz drugih obnovljivih izvora energije, potrebno je smanjiti troškove pro-
izvodnje i održavanja vjetroagregata. Kako bi se poboljšala iskoristivost vjetroagregata
i smanjila njihova cijena, rastu ulaganja u razvoj i istraživanje vjetragregata. Prema po-
dacima WindEurope-a, 2016. godine se u Europskoj Uniji uložilo 27.5 milijardi eura
u razvoj vjetroagregata.
Proizvodaci vjetroagregata razvijaju vjetroagregate sve vecih dimenzija kako bi
smanjili cijenu proizvodnje elektricne energije jer snaga koju vjetar može predati vje-
troagregatu raste s kvadratom polumjera rotora vjetroagregata. Problem s vjetroagre-
gatima vecih dimenzija je u tome što zbog velikih dimenzija dolazi do pojave nejed-
nolikog polja vjetra koje dolazi do rotora vjetroagregata. Takva nejednolika raspo-
djela vjetra dovodi do velikih strukturnih opterecenja koje konstrukcija vjetroagregata
mora trpiti. Dijelovi kontrukcije koji trpe najveca opterecenja su toranj, lopatice i oso-
vina. Buduci da moraju podnijeti velika opterecenja za vrijeme rada vjetroagregata, to
su ujedno i dijelovi cija su proizvodnja i održavanje najskuplji. Kako vjetroagregati
1
Slika 1.1: Vjetroagregat proizvodaca Senvion [1]
postaju sve veci, veca je i važnost naprednih strategija upravljanja koje za cilj imaju
smanjenje strukturnih opterecenja uz maksimiziranje proizvodnje i koje osiguravaju
dovoljno dug period eksploatacije vjetroagregata.
Ovaj rad se fokusira na smanjenje strukturnih opterecenja vjetroagregata i poveca-
nje iskoristivosti pretvorbe energije vjetra primjenom algoritama optimalnog upravlja-
nja uz korištenje LIDAR senzora. LIDAR senzorom je moguce mjeriti karakteristike
vjetra ispred vjetroagregata što omogucava proaktivno djelovanje algoritma upravlja-
nja vjetroagregatom. Najveca prednost prilikom korištenja LIDAR senzora je moguc-
nost detekcije ekstremnih udara vjetra prije nego oni dosegnu vjetroagregat, što daje
sustavu upravljanja vjetroagregatom mogucnost pripreme sustava i ublažavanje eks-
tremnih opterecenja.
Za sintezu sustava upravljanja vjetroagregatom u radu se koristi modelsko predik-
tivno upravljanje (eng. Model Predictive Control, MPC). Osnovni princip modelskog
prediktivnog upravljanja je racunanje buducih stanja sustava na temelju poznatog mo-
dela sustava i odabir upravljackog signala koji minimizira optimizacijski kriterij. MPC
zahtijeva veliku racunalnu moc i prije se upotrebljavao samo u vrlo sporim procesima.
Povecanjem racunalne moci dostupne u suvremenim sustavima upravljanja, MPC je
postao upotrebljiv i za upravljanje bržim procesima. Modelsko prediktivno upravlja-
nje je pogodno za upravljanje vjetroagregatom jer omogucava formulaciju problema
s više ulaza i izlaza, omogucava pronalaženje kompromisa izmedu više zadaca sus-
tava, omogucava ogranicavanje upravljackih varijabli i varijabli stanja i omogucava
ukljucivanje predikcije poremecajnih varijabli u optimizacijski problem.
2

Rad je strukturiran kako slijedi. U drugom poglavlju su opisani osnovni principi
upravljanja vjetroagregatom. U trecem poglavlju je opisan nelinearni model vjetro-
agregata. U cetvrtom poglavlju je opisano simulacijsko okruženje unutar kojeg se
simulira rad vjetroagregata. U petom poglavlju je prikazano kako se estimira efektivna
brzina vjetra na rotoru vjetroagregata pomocu mjerenja LIDAR senzora. U šestom po-
glavlju je opisana sinteza modelskog prediktivnog regulatora. U sedmom poglavlju su
iznešeni simulacijski rezultati projektiranog sustava upravljanja.
3
2. Sustav upravljanja vjetroagregatom
Iako postoji nekoliko razlicitih koncepata upravljanja vjetroagregatima, vecina
velikih vjetroagregata radi s promjenjivom brzinom vrtnje rotora i promjenjivim iz-
nosom zakreta lopatica. Osnovni zadatak koji se postavlja prilikom sinteze sustava
upravljanja vjetroagregatom je maksimizacija ekstrakcije energije iz vjetra uz odr-
žavanje opterecenja unutar granica koje konstrukcija vjetroagregata može podnijeti.
Upravljacki signali kojima se postižu zadani ciljevi su kut zakreta lopatica i moment
generatora.
Lopatice vjetroagregata se mogu zakretati zajedno, no mnogi noviji modeli vjetroagre-
gata imaju razvijene i sustave za individualno zakretanje lopatica. Kod vecih vjetro-
agregata može se upravljati i zakretom gondole kako bi se osiguralo da je os rotacije
vjetroagregata uvijek poravnata sa smjerom vjetra. Isto tako postoje i cetiri podrucja
rada vjetroagregata [2]:
1. Podrucje u kojem je brzina vjetra ispod minimalne brzine
U ovom podrucju vjetroagregat ne proizvodi elektricnu energiju, sve dok brzina
vjetra ne poraste do razine na kojoj je snaga vjetra dovoljno velika da pokrene
rad vjetroagregata.
2. Podrucje rada kada je brzina vjetra ispod nazivne brzine
U ovom podrucju rada se mijenja brzina rotora vjetroagregata kako bi se mak-
simiziralo iskorištenje energije vjetra, dok se lopatice drže na konstantnom kutu
zakreta.
3. Podrucje rada kada je brzina vjetra iznad nazivne brzine
U ovom podrucju rada se brzina vrtnje rotora vjetroagregata održava na naziv-
noj vrijednosti mijenjanjem kuta zakreta lopatica kako bi se sprijecila oštecenja
konstrukcije vjetroagregata.
4. Podrucje rada kada je brzina vjetra iznad maksimalne brzine
Kada se brzina vjetra nastavi povecavati, sustav upravljanja više ne može održa-
4
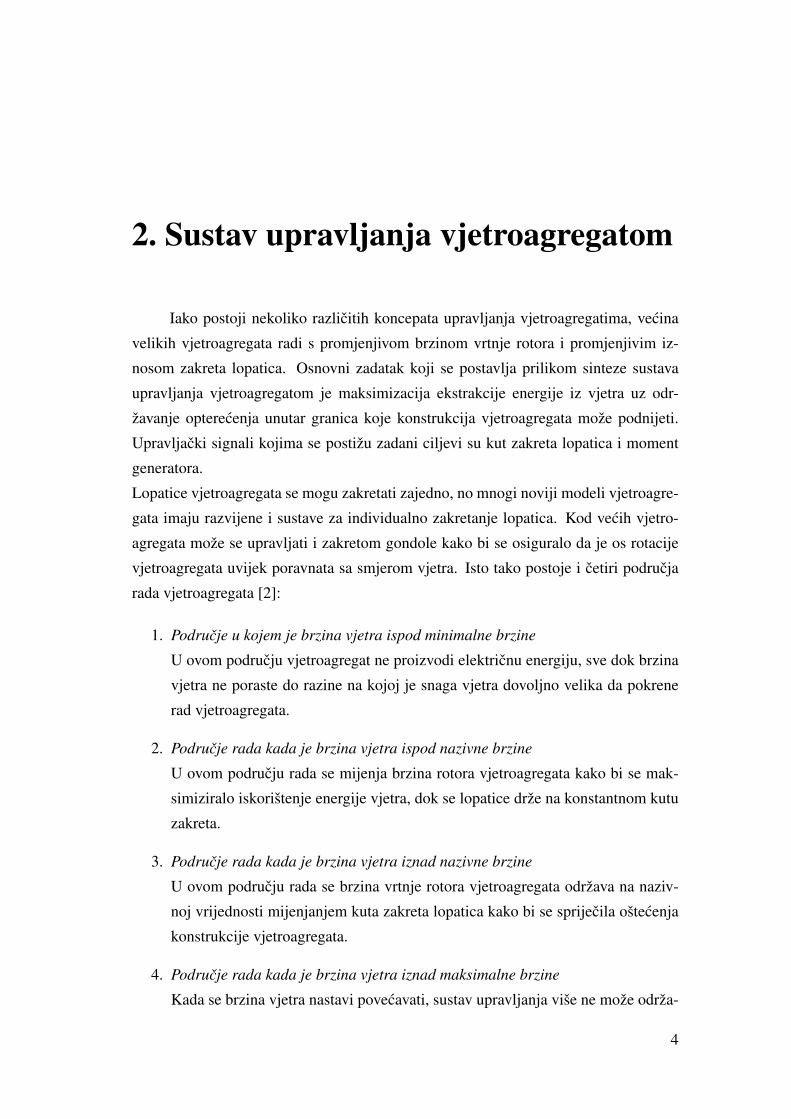
Slika 2.1: Podrucja rada vjetroagregata [2]
vati brzinu vrtnje rotora na nazivnoj vrijednosti i obavezno je iskljucenje vjetro-
agregata kako bi se sprijecila oštecenja. Lopatice se pocinju zakretati oko vlastite
osi do položaja u kojem pružaju najmanji otpor vjetru ("na nož") i vjetroagregat
je u slobodnoj rotaciji.
Podrucja rada vjetroagregata se mogu vidjeti na slici 2.1. Crvena krivulja na slici
predstavlja dostupnu snagu vjetra koja je zadana izrazom:
Pvj =1
2ρR2πv3vj, (2.1)
gdje ρ predstavlja gustocu zraka, R je polumjer rotora, a vvj je brzina vjetra. Plava
krivulja predstavlja aerodinamicku ucinkovitost vjetroagregata danu omjerom snage
preuzete iz vjetra i ukupne snage vjetra:
CP =P
Pvj
(2.2)
Omjer CP ovisi o mnogo faktora, ali dva glavna su kut zakreta lopatica i omjer
obodne brzine i brzine vjetra:
λ =ωR
vvj. (2.3)
U drugom podrucju rada vjetroagregata referenca momenta generatora se postavlja
na iznos odreden maksimalnim iznosom koeficijenta snage CP kako bi se maksimizi-
ralo iskorištavanje snage vjetra.
5
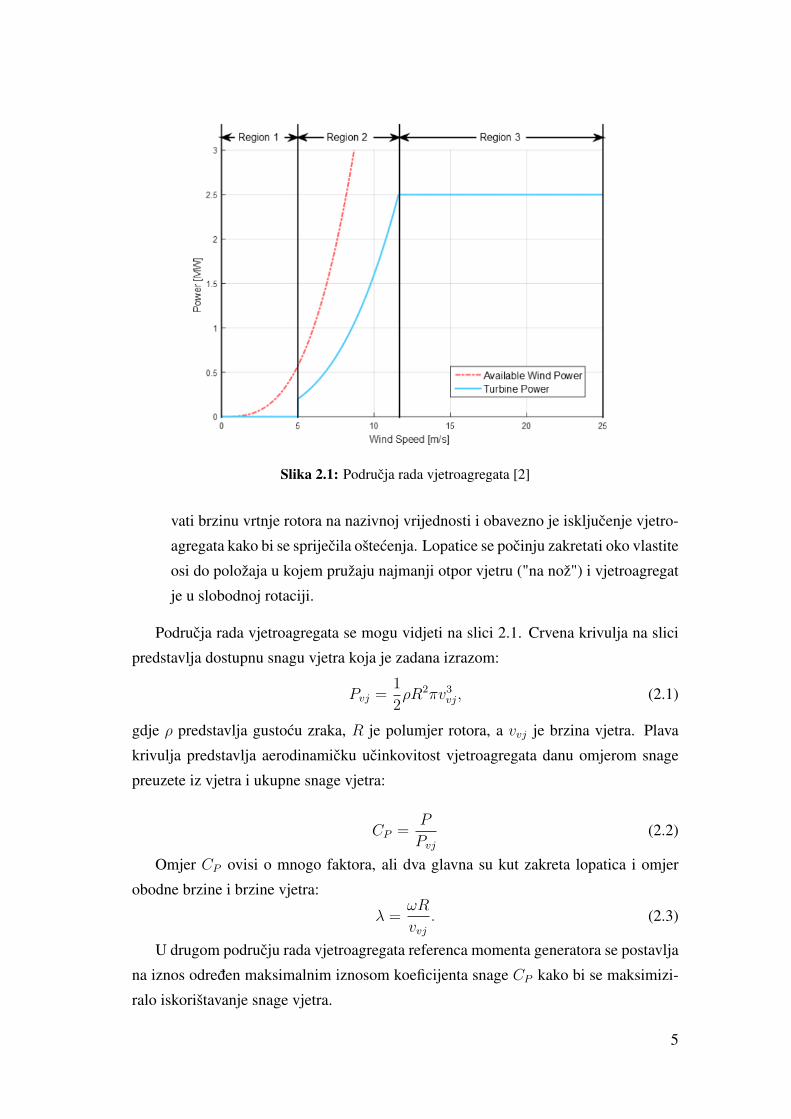
U trecem podrucju referenca momenta generatora se drži na konstantom iznosu
jednakom nazivnom. Zakretom lopatica se mijenja koeficijent CP kako bi se brzina
vrtnje održavala na nazivnom iznosu. Ako brzina vjetra poraste, rotor se ubrzava i
regulator mijenja kut zakreta lopatica kako bi smanjio vrijednost koeficijenta CP , što
usporava vrtnju rotora dok se ne postigne ravnotežno stanje. Shema osnovnog sustava
upravljanja vjetroagregatom opisanog u ovom poglavlju se može vidjeti na slici 2.2.
Slika 2.2: Osnovni sustav upravljanja vjetroagregatom [3]
Slika 2.3: Jednostavni Simulink model vjetroagregata OpenLoop.mdl [2]
6
3. Simulacijsko okruženje
Kao simulacijsko okruženje u ovom radu se koristi MATLAB u sprezi s FAST
(Fatigue, Aerodinamics, Structure and Turbulance) simulatorom. FAST je aerolasticni
simulator koji može simulirati ponašanje razlicitih vjetroagregata. FAST je glavni alat
americkog Nacionalnog centra za obnovljive izvore energije (NREL) za simuliranje di-
namike vjetroagregata koji ukljucuje aerodinamicke modele, hidrodinamicke modele,
modele elektricnih i upravljackih sustava te strukturne (elasticne) modele koji omo-
gucuju spregnutu nelinearnu simulaciju svih navedenih sustava u vremenskoj domeni.
Pomocu FAST-a se mogu simulirati razliciti tipovi vjetroagregata. FAST se zasniva
na naprednim inženjerskim modelima izvedenim iz osnovnih zakona fizike, ali s odgo-
varajucim pojednostavljenjima i dopunama na temelju racunalnih rješenja i rezultata
eksperimenata. Aerodinamicki modeli koriste podatke o strujanju vjetra kako bi došli
do efekata pobude rotora i aerodinamickih opterecenja lopatica, ukljucujuci dinamicke
gubitke. FAST ima dva osnovna moda rada – simulacijski i linearizacijski.
FAST je moguce povezati sa Simulink-om, koji je popularni alat za simuliranje
sustava upravljanja. Simulink je povezan s FAST-om pomocu bloka S-function koji
omogucava ukljucivanje korisnikovih Fortran rutina. Simulink u sprezi s FAST-om
omogucava jednostavnu simulacijsku provjeru raznih sustava upravljanja vjetroagre-
gatom. Prije simulacije je potrebno podesiti ulaznu datoteku koja se može prepoznati
po ekstenziji .fst. Nakon simulacije u Simulinku moguce je pronaci podatke o izlaznim
varijablama u matrici OutData koja se nalazi u Matlabovom radnom prostoru. Jednos-
tavan model sustava vjetroagregata u Simulink-u se može vidjeti na slici 2.3.
7

4. Modeliranje vjetroagregata
Kako bi se postiglo zadovoljavajuce vladanje dinamickog sustava kao što je vje-
troagregat, kljucno je prikladno modelirati taj sustav. Model sustava bi trebao biti
dovoljno jednostavan kako bi izracun predikcije istog modela bio moguc u realnom
vremenu, npr. prilikom korištenja MPC-a, a istovremeno bi trebao biti dovoljno preci-
zan kako bi opisana dinamika bila relevantna za upravljanje vjetroagregatom.
4.1. Kvazistaticki model vjetroagregata
Klasicni aerolasticni simulatori, poput FAST-a koji se koristi u ovome radu,
koriste modele koji opisuju dinamiku vrlo blisku stvarnoj dinamici vjetroagregata, no
ti modeli su prekompleksni za korištenje prilikom sinteze sustava upravljanja.
Reducirani nelinearni model koji se koristi u ovom radu ukljucuje dinamicki model
njihanja tornja, model njihanja lopatica, model vrtnje turbine i model aktuatora za
zakret lopatica.
4.1.1. Aerodinamicki model vjetroagregata
Turbina vjetroagregata se okrece kao posljedica djelovanja razlike aerodinamic-
kog momenta koji nastaje djelovanjem vjetra na vjetroagregat i momenta generatora.
Vjetar stvara i silu potiska koja uzrokuje opterecenja na konstrukciju vjetroagregata.
Izrazi koji opisuju aerodinamicki moment i silu potiska na rotoru vjetroagregata dani
su izrazima:
Ma =1
2ρzR
3πv2relCQ(λ, β); (4.1)
Fa =1
2ρzR
2πv2relCt(λ, β). (4.2)
U izrazima (4.1) i (4.2) ρz predstavlja gustocu zraka, R je polumjer rotora, a vrel je
8

superpozicija brzine njihanja tornja i efektivne brzine vjetra na rotoru vjetroagregata:
vrel = v0 − xT . (4.3)
Nelinearnost u aerodinamickom modelu proizlazi iz kvadraticne ovisnosti aerodina-
mickog momenta i sile potiska o brzini vjetra, a nelinarnost unose i koeficijenti CQ
i Ct koji nelinearno ovise o omjeru obodne brzine rotora i brzine vjetra λ te o kutu
zakreta lopatica β. Obodna brzina vrtnje rotora je umnožak kutne brzine vrtnje rotora
i polumjera rotora, a λ je zadan izrazom
λ =ΩR
vrel. (4.4)
Koeficijenti CQ i Ct se najcešce ukljuce u model kao dvodimenzionalne pregledne
(engl. lookup) tablice, koje se dobiju statickom analizom aerodinamike rotora vjetro-
agregata.
4.1.2. Dinamicki model brzine vrtnje rotora
Na stvarnim vjetroagregatima osovina nije potpuno kruta i dolazi do torzije.
Buduci da ta torzija ima zanemariv utjecaj na opterecenje konstrukcije vjetroagregata,
u ovom radu se osovina smatra potpuno krutom. Brzina vrtnje generatora i brzina
vrtnje rotora tada su povezani samo preko omjera reduktora:
nG =ΩG
Ω(4.5)
Moment kojim se ubrzava rotor ovisi o razlici aerodinamickog momenta i momenta
generatora koji mu se suprostavlja.
JtΩ = Ma(xT ,Ω, β, vrel) − nGMG (4.6)
U izrazu (4.6) Jt predstavlja ukupni moment tromosti koji se osjeti na osovini ro-
tora, a doprinose mu momenti tromosti glavcine, lopatica i generatora.
Jt = JH + 3JB + n2GJG (4.7)
4.1.3. Dinamicki model njihanja tornja
Do njihanja tornja dolazi zbog sile potiska koja je dana jednadžbom (4.2). Toranj
se može njihati u dva smjera, s obzirom na smjer brzine vjetra. To su njihanje naprijed-
nazad i njihanje u stranu. Buduci da je trajektorija njihanja vjetra u stranu okomita na
9

Slika 4.1: Pojednostavljeni prikaz lopatice [4]
brzinu vjetra, njihanje u stranu je puno manje amplitude nego njihanje naprijed-nazad
i njihanje u stranu se može zanemariti.
Njihanje tornja se modelira kao opruga i može se opisati diferencijalnom jednadžbom
drugog reda:
xT + 2ζTωT xT + ω2t xT = KFaω
2TFa (4.8)
Parametri diferencijalne jednadžbe su prirodna frekvencija ωT , omjer prigušenja
ζT i staticko pojacanje KFa.
4.1.4. Dinamicki model njihanja lopatica
Osim što uzrokuje njihanje tornja, sila potiska uzrokuje i njihanje lopatica. Isto
kao i toranj, lopatice se mogu njihati u dva smjera. Gibanje lopatica u stranu je zane-
marivo u odnosu na gibanje lopatica naprijed-nazad.
Kut otklona lopatice iz ravnotežnog položaja φ, pomocu slike 4.1, može se odrediti
kao:
ϕ = arctanxbl. (4.9)
Buduci da je kut otklona jako mali, može se uzeti aproksimacija
ϕ ≈ xbl. (4.10)
Realna lopatica nije kruta, nego je elasticna i zaobljena i u stvarnosti je kut ϕ
uvijek jednak nuli. Zbog toga je potrebno uvesti faktor a1 koji predstavlja pomak
centra gravitacije s obzirom na otklon lopatice od ravnotežnog položaja:
xcog = a1xb. (4.11)
10

Prilikom modeliranja dinamike lopatice pretpostavlja se da je lopatica kruto tijelo
momenta tromosti Jb i masemb. Gibanje lopatice je u sprezi s gibanjem tornja. Sprega
s tornjem je u obliku sile reakcije R, faktora elasticnosti k i faktora prigušenja d.
Momenti koji djeluju na korijen lopatice opisani su jednadžbom:
− Jbϕ− dϕ− kϕ−mba1lgxb + laFa −mblgxT = 0. (4.12)
Iz jednadžbe (4.12) slijedi jednadžba koja opisuje njihanje lopatica:
xb + 2ζbωbxb + ω2b = Kbω
2b (Fa −mb
lglaxT ), (4.13)
gdje su
ω2b =
k
Jb +mblga1l
ζb =dωb
2k
Kb =lal
k.
(4.14)
Sila reakcije R koja djeluje na toranj dana je izrazom:
R = Fa −mba1xb −mbxT , (4.15)
gdje je izraz mbxT vec ukljucen u model njihanja tornja dan jednadžbom (4.8).
Jednadžba (4.13) koja opisuje njihanje lopatica može se kombinirati s jednadžbom
(4.8) koja opisuje njihanje tornja, tvoreci tako oscilatorni sustav s dvije mase. Te dvije
jednadžbe se mogu napisati u matricnom obliku:[1 KFaω
2Tmba1
mblglakbω
2b 1
][xT
xb
]+
[2ωT ζT 0
0 2ωbζb
][xT
xb
]+[
ω2T 0
0 ω2b
][xT
xb
]=
[KFaω
2T
kbω2b
]Fa.
4.1.5. Model aktuatora
Model aktuatora za zakret lopatica je diferencijalna jednadžba drugog reda koja
povezuje referencu zakreta lopatica βref sa stvarnim kutom zakreta lopatica β:
β + 2ωpζpβ + ω2pβ = ω2
pβref . (4.16)
11
Dinamika elektricnog pogona je višestruko brža od dinamike ostalih dijelova sus-
tava vjetroagregata, stoga se pretpostavlja da je stvarni moment generatora uvijek jed-
nak referenci momenta generatora.
MG = MG,ref . (4.17)
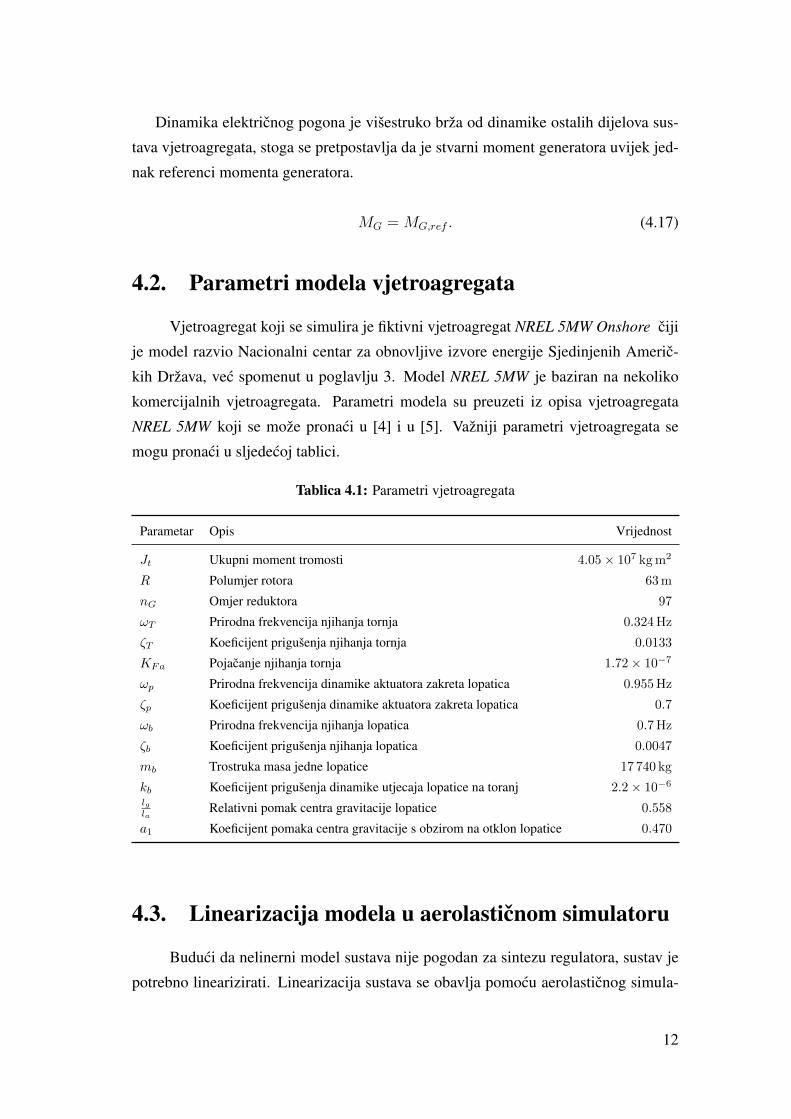
4.2. Parametri modela vjetroagregata
Vjetroagregat koji se simulira je fiktivni vjetroagregat NREL 5MW Onshore ciji
je model razvio Nacionalni centar za obnovljive izvore energije Sjedinjenih Americ-
kih Država, vec spomenut u poglavlju 3. Model NREL 5MW je baziran na nekoliko
komercijalnih vjetroagregata. Parametri modela su preuzeti iz opisa vjetroagregata
NREL 5MW koji se može pronaci u [4] i u [5]. Važniji parametri vjetroagregata se
mogu pronaci u sljedecoj tablici.
Tablica 4.1: Parametri vjetroagregata
Parametar Opis Vrijednost
Jt Ukupni moment tromosti 4.05× 107 kgm2
R Polumjer rotora 63m
nG Omjer reduktora 97
ωT Prirodna frekvencija njihanja tornja 0.324Hz
ζT Koeficijent prigušenja njihanja tornja 0.0133
KFa Pojacanje njihanja tornja 1.72× 10−7
ωp Prirodna frekvencija dinamike aktuatora zakreta lopatica 0.955Hz
ζp Koeficijent prigušenja dinamike aktuatora zakreta lopatica 0.7
ωb Prirodna frekvencija njihanja lopatica 0.7Hz
ζb Koeficijent prigušenja njihanja lopatica 0.0047
mb Trostruka masa jedne lopatice 17 740 kg
kb Koeficijent prigušenja dinamike utjecaja lopatice na toranj 2.2× 10−6
lgla
Relativni pomak centra gravitacije lopatice 0.558
a1 Koeficijent pomaka centra gravitacije s obzirom na otklon lopatice 0.470
4.3. Linearizacija modela u aerolasticnom simulatoru
Buduci da nelinerni model sustava nije pogodan za sintezu regulatora, sustav je
potrebno linearizirati. Linearizacija sustava se obavlja pomocu aerolasticnog simula-
12

tora FAST koji je u mogucnosti pronaci željenu radnu tocku vjetroagregata i u toj rad-
noj tocki linearizirati sustav. Izlaz iz procesa linearizacije u FAST-u su matrice stanja
lineariziranog sustava, podaci o radnoj tocki i ostale detaljne informacije o postupku
linearizacije.
Linearizacija je jedan od dva glavna moda rada FAST-a. Linearizacija u FAST-u
se provodi u dva koraka. U prvom koraku se racuna radna tocka periodicnog mir-
nog stanja, a u drugom se numericki linearizira FAST model. Rezultat linearizacije
je prikaz sustava u prostoru stanja u matricnom obliku. Za pocetak postupka line-
arizacije potrebno je podesiti parametre konfiguracijske .fst datoteke. Sam postupak
linearizacije pokrece se iz naredbenog prozora. U naredbenom prozoru potrebno se
pozicionirati u mapu u kojoj se nalazi .fst datoteka za linearizaciju modela vjetroagre-
gata. Nakon što smo se ispravno pozicionirali, potrebno je upisati naredbu FAST <Ime
.fst Datoteke>. Tada se pokrece postupak linearizacije ukoliko su svi parametri dobro
podešeni. Program ce pokušati pronaci radnu tocku ravnotežnog stanja integracijom
nelinarnih jednadžbi kroz toliko koraka koliko je potrebno da se smatra da rješenje
konvergira ili dok ne istekne predvideno vrijeme trajanja linearizacije. Smatra ce se
da sustav konvergira ukoliko razlike izmedu koraka budu manje od postavljene tole-
rancije. Ukoliko program ne uspije pronaci rješenje, treba povecati pretpostavljeno
vrijeme trajanja linearizacije, povecati prigušenje sustava ili povecati vrijednosti tole-
rancije za konvergenciju.
U ovom radu sustav je lineariziran u više radnih tocki, s obzirom na brzinu vjetra
cija je vrijednost prilikom linearizacije bila od 10 m/s do 20 m/s. Prilikom lineariza-
cije pomocu FAST-a brzina vjetra mora biti konstantna. Varijable stanja, upravljacki
signali, oblik poremecaja, kao i podrucje rada vjetroagregata se mogu podesiti u ulaz-
noj datoteci za linearizaciju. U ovom radu linearizirani sustav ima 12 varijabli stanja.
To su pomak tornja i pomaci triju lopatica u smjeru naprijed-nazad, kutna brzina rotora,
njihove derivacije te moment generatora i kut zakreta lopatica. Upravljacke varijable
su derivacije momenta generatora i kuta zakreta lopatica, a poremecaj je vjetar s pret-
postavkom konstantne brzine.
13

5. Predikcija efektivne brzine vjetrana rotoru vjetroagregata
Kako bi se poboljšala kvaliteta sustava upravljanja vjetroagregatom, korisno je
poznavati karakteristike vjetra koji ce tek doseci vjetroagregat. Poznavajuci brzinu vje-
tra ispred vjetroagregata, mogu se optimizirati upravljacke velicine kojima se regulira
rad vjetroagregata, što kao posljedicu ima vecu iskoristivost energije dostupne u vjetru
i smanjenje opterecenja te produljivanje radnog vijeka vjetroagregata.
5.1. Mjerenje brzine vjetra LIDAR senzorom
LIDAR sustavi mogu pružiti informacije o karakteristikama vjetra na raznim
udaljenostima ispred vjetroagregata, što je temelj za nove koncepte u upravljanju vje-
troagregatima, poput predupravljanja ili modelskog prediktivnog upravljanja. Više o
korištelju LIDAR-a za upravljanje vjetroagregatima se može pronaci u [6].
Iako je prilikom simulacije lako dobiti brzinu vjetra u bilo kojem trenutku, u stvar-
nosti to nije moguce jednostavno ostvariti. U tu svrhu se na konstrukciju vjetroagregata
montiraju LIDAR senzori koji mogu snimiti karakteristike nadolazeceg vjetra. Pomocu
mjerenja LIDAR senzora moguce je dobiti efektivnu brzinu vjetra na rotoru vjetroagre-
gata, koja je bitna informacija prilikom sinteze sustava upravljanja vjetroagregatom.
Jedan od ciljeva ovog rada je i simuliranje rada LIDAR senzora u ciju se svrhu ko-
risti najnovija verzija aerolasticnog simulatora FAST koja podržava simulaciju LIDAR
mjerenja.
5.1.1. LIDAR sustavi
LIDAR je akronim za eng. Light detection and ranging te se iz tog punog naziva
vec da naslutiti da je LIDAR senzor zastovan na optici. Princip prema kojem ovaj la-
serski radar mjeri brzinu je naizgled jednostavan. Naime, zraka koherentne svjetlosti
14

osvjetljava predmet cija se brzina mjeri, od kojeg se svjetlosni snop odbija te se djelic
odbijenog snopa vraca nazad do prijemnika. Kretanje predmeta duž pravca odredenog
smjerom odaslanog snopa svjetlosti dovodi do promjene u frekvenciji odbijenog snopa
svjetlosti zbog Dopplerovog ucinka. Ta promjena u frekvenciji se može precizno iz-
mjeriti na temelju spektralne analize snopa svjetlosti koji cine pomiješani originalni
snop i detektirani snop svjetlosti. Dvije su izvedbe LIDAR-a koje se temelje na ovako
opisanom principu. To su Countinuous Wave (CW) LIDAR i pulsirajuci (eng. pulsed
LIDAR).
CW LIDAR je jednostavnija izvedba u kojoj uredaj odašilje kontinuiranu nemodu-
liranu zraku svjetla na odredenu udaljenost koja se zove fokus i karakteristike vjetra
se mogu mjeriti samo u tocki fokusa. Izlaz iz prijemnika se procesuira u diskretnim
razmacima cija se vremenska stopa odreduje po potrebi. Mjerenja se mogu obavljati
na nekoliko razlicitih udaljenosti mijenjanjem fokusa, ali se brzina vjetra na razlicitim
udaljenostima ne može mjeriti istovremeno. Ovakvi uredaji mogu mjeriti brzinu vje-
tra na udaljenostima od maksimalno nekoliko stotina metara. Na vecim udaljenostima
mjerenja postaju neprecizna i nije moguce odrediti turbulencije u vjetru, nego samo
njegovu srednju brzinu.
Kod pulsirajuceg LIDAR-a svjetlost se emitira u kratkotrajnim intervalima od ne-
koliko milisekundi. Buduci da je brzina svjetlosti konstanta, zna se tocno u kojem
trenutku ce prijemnik detektirati odbijeni puls svjetlosne zrake. Pomocu pulsirajuceg
LIDAR-a je moguce mjeriti brzinu vjetra na razlicitim udaljenostima paralelno. Nedos-
tatak je što kratko trajanje pulsa degradira rezoluciju brzine i uvijek postoji kompromis
izmedu rezolucije udaljenosti i rezolucije brzine. Pulsirajuci LIDAR omogucava mje-
renje i na vecim udaljenostima ( >10 km). Pulsirajuci LIDAR zahtijeva težu tehnicku
izvedbu i održavanje od CW LIDAR-a te je kraceg životnog vijeka, stoga se u praksi
cešce koristi CW LIDAR. Kako bi LIDAR bolje estimirao brzinu vjetra, potrebno je na-
praviti mjerenja u razlicitim smjerovima, što se može postici skeniranjem rotirajucom
zrakom svjetlosti koja tada u prostoru opisuje stožac (CW LIDAR) ili prebacivanjem
zrake izmedu razlicitih pocetnih pozicija (pulsirajuci LIDAR).
Glavni nedostatak LIDAR-a je to što može mjeriti samo komponentu vjetra koja je
u smjeru pravca odredenog zrakom svjetlosti. Taj problem bi se mogao riješiti mon-
tiranjem više LIDAR-a na znacajnim prostornim razmacima, ali je to rješenje u praksi
skupo zbog vece kompleksnosti i troškova implementacije, stoga se u praksi najcešce
montira jedan LIDAR senzor.
15
Nekoliko faktora utjece na kvalitetu mjerenja LIDAR senzorom:
– Poravnanje s vjetroagregatom
Kada zraka LIDAR senzora nije poravnata sa smjerom vjetroaregata, senzor ce
mjeriti vjetar koji ne dolazi do vjetragregata i zbog toga mjerenje nece posjedo-
vati informaciju o vjetru koji utjece na rad vjetroagregata i regulator nece raditi
ispravno.
– Vertikalne i lateralne komponente brzine vjetra
Pogreška mjerenja se povecava ako su lateralna i vertikalna komponenta vje-
tra usporedivo velike u odnosu na aksijalnu komponentu, koju LIDAR jedino i
može mjeriti buduci da je mjerenje moguce samo u smjeru zrake svjetlosti.
– Vrijeme propagiranja
Buduci da LIDAR senzor mjeri brzinu vjetra na nekoj udaljenosti ispred vje-
troagregata, potrebno je estimirati vrijeme koje je potrebno izmjerenom vjetru
da dode do samog vjetroagregata. Loša estimacija vremena propagiranja vjetra
rezultirat ce lošim radom regulatora jer vjetar koji je izmjeren senzorom nece
biti onaj vjetar koji utjece na vjetroagregat.
– Atmosferski uvjeti
LIDAR senzor ima poteškoce u radu kada je vrijeme vedro jer tada ima manje
cestica u atmosferi od kojih se zrake svjetla odbijaju. CW LIDAR ima poteškoca
i kada je niska naoblaka zbog raspršivanja laserske zrake.
5.1.2. Odabir konfiguracije LIDAR senzora
U ovome radu se simulira rad CW LIDAR senzora s rotirajucom zrakom svje-
tlosti. CW LIDAR je odabran jer FAST omogucava njegovu simulaciju na jednosta-
van nacin. Kako podesiti FAST za simulaciju LIDAR senzora i ekstrakciju podataka
o brzini vjetra, može se procitati u dodatku A. Radi kvalitetnijeg mjerenja se koristi
rotirajuca zraka svjetlosti koja opisuje stožac, cije je dimenzije potrebno odrediti. Po-
željno je da radijus baze stošca r1 bude otprilike 75% radijusa rotora vjetroagregata jer
se maksimalna snaga iz vjetra ekstrahira upravo na toj udaljenosti. Kut elevacije θ1ne smije biti veci od 45 jer pri vecim kutevima pogreška mjerenja postaje znacajno
velika. Kada znamo radijus baze i kut elevacije, jednostavno je odrediti i udaljenost
D1 na kojoj se obavlja mjerenje pomocu relacije:
tan θ1 =r1D1
(5.1)
16

Opisana konfiguracija se može vidjeti na slici 5.1, a parametri za simulaciju mje-
renja LIDAR senzorom mogu se naci u tablici 5.1.
Slika 5.1: Ilustracija mjerenja CW LIDAR-om [2]
Tablica 5.1: Parametri za mjerenje LIDAR senzorom korišteni u radu
Parametar Vrijednost
θ1 34
r1 47.2 m
D1 70 m
Period kruženja zrake 3.6 s
5.2. Identifikacija prijenosne funkcije vjetra
Za upravljanje vjetroagregatom potrebno je poznavati efektivnu brzinu vjetra na
rotoru vjetroagregata. U ovom radu se analizira slucaj kada se efektivna brzina vjetra
na rotoru vjetroagregata estimira iz podataka dobivenih simulacijom vjetroagregata i
mjerenja LIDAR senzorom. Na temelju pretpostavke da se LIDAR senzorom mjeri br-
zina vjetra na odredenoj udaljenosti ispred vjetroagregata, pretpostavlja se da mjereni
17

vjetar nema iste karakteristike kao vjetar koji ce doci do vjetroagregata. Razvoj vjetra
izmedu tocke mjerenja i vjetroagregata može se opisati prijenosnom funkcijom:
G(s) =bms
m + bm−1sn−1 + · · · + b1s+ b0
ansn + an−1sn−1 + · · · + a1s+ a0, (5.2)
ciji je red i parametre potrebno identificirati.
Za identifikaciju parametara je odabrana metoda najmanjih kvadrata (engl. Least
Squares Method) koja zahtijeva poznavanje odziva ulaznog i izlaznog signala ciji od-
nos opisuje prijenosna funkcija opisana jednadžbom (5.2). Ulazni i izlazni signal su
dobiveni provodenjem simulacije vjetroagregata snage 5MW u programskom paketu
FAST americkog nacionalnog laboratorija za obnovljive izvore energije. U ovom slu-
caju ulazni signal je simulirano mjerenje LIDAR senzora, a izlazni signal je efektivna
brzina vjetra na rotoru vjetroagregata. Kako se simulira mjerenje LIDAR senzorom
opisano je u prethodnom poglavlju i u dodatku A. Iznos efektivne brzine vjetra na ro-
toru vjetroagregata nije moguce izravno dobiti kao izlazni podatak simulacije, nego ju
je potrebno izracunati. Za izracun efektivne brzine vjetra koriste se podaci dobiveni si-
mulacijom i jednadžbe nelinearnog modela vjetroagregata. Sljedece jednadžbe opisuju
reducirani nelinearni model dinamike pogonskog sustava vjetroagregata:
JΩ +Mg/i = Ma(xT ,Ω, θ, v0) (5.3)
Ma =1
2ρπR3 cP (λ, θ)
λv2rel. (5.4)
U jednadžbi (5.3) Ω predstavlja brzinu vrtnje rotora vjetroagregata, Mg je moment
generatora, i je koeficijent prijenosa, a Ma je aerodinamicki moment koji ovisi o gi-
banju tornja vjetroagregata (xT ), brzini vrtnje rotora, iznosu kolektivnog kuta zakreta
lopatica (θ) i efektivnoj brzini vjetra na rotoru (v0). J je ukupni moment inercije koji
osjeca rotirajuca osovina, a kojemu doprinose glavcina rotora, lopatice i elektricni ge-
nerator.
U jednadžbi (5.4) R predstavlja polumjer rotora, ρ je gustoca zraka, a λ je zadana
jednadžbom (2.3). Parametar cP je koeficijent efektivne snage koji se zadaje pomocu
pregledne (engl. lookup) tablice koja se pak dobije simulacijom vjetroagregata u usta-
ljenom stanju. Relativna brzina vjetra se definira kao superpozicija brzine vrha tornja
18
i efektivne brzine vjetra:
vrel = v0 − xT . (5.5)
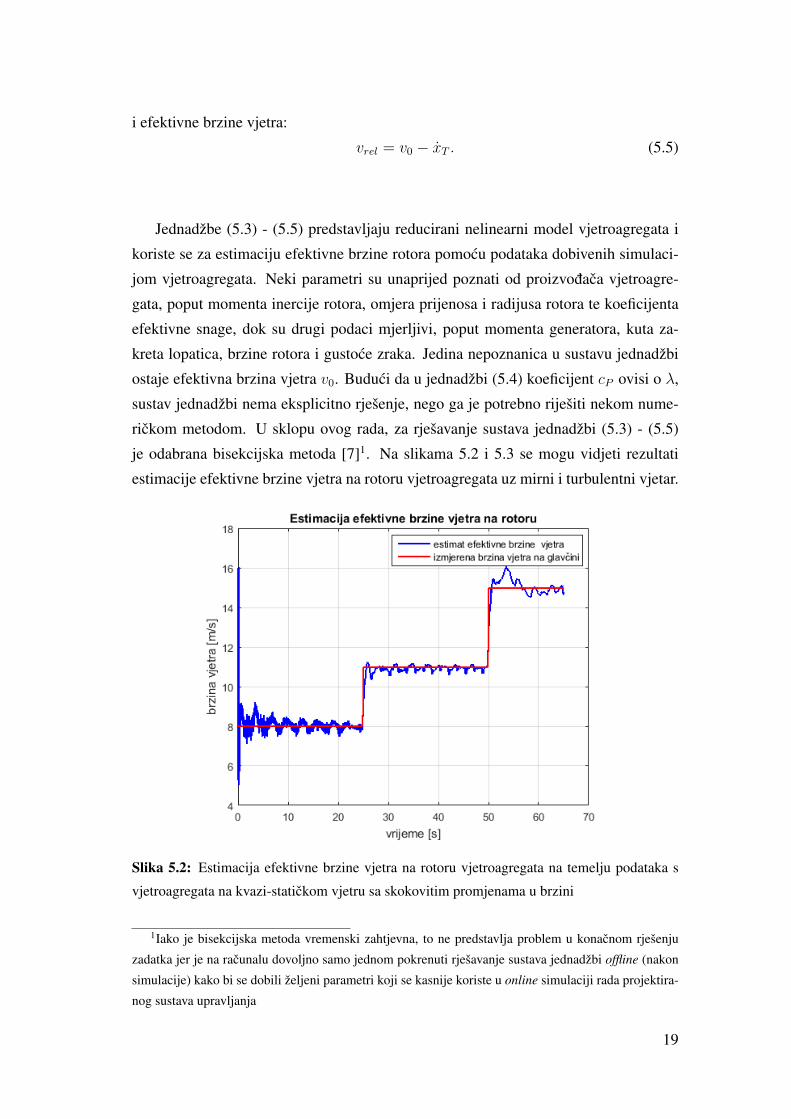
Jednadžbe (5.3) - (5.5) predstavljaju reducirani nelinearni model vjetroagregata i
koriste se za estimaciju efektivne brzine rotora pomocu podataka dobivenih simulaci-
jom vjetroagregata. Neki parametri su unaprijed poznati od proizvodaca vjetroagre-
gata, poput momenta inercije rotora, omjera prijenosa i radijusa rotora te koeficijenta
efektivne snage, dok su drugi podaci mjerljivi, poput momenta generatora, kuta za-
kreta lopatica, brzine rotora i gustoce zraka. Jedina nepoznanica u sustavu jednadžbi
ostaje efektivna brzina vjetra v0. Buduci da u jednadžbi (5.4) koeficijent cP ovisi o λ,
sustav jednadžbi nema eksplicitno rješenje, nego ga je potrebno riješiti nekom nume-
rickom metodom. U sklopu ovog rada, za rješavanje sustava jednadžbi (5.3) - (5.5)
je odabrana bisekcijska metoda [7]1. Na slikama 5.2 i 5.3 se mogu vidjeti rezultati
estimacije efektivne brzine vjetra na rotoru vjetroagregata uz mirni i turbulentni vjetar.
Slika 5.2: Estimacija efektivne brzine vjetra na rotoru vjetroagregata na temelju podataka s
vjetroagregata na kvazi-statickom vjetru sa skokovitim promjenama u brzini
1Iako je bisekcijska metoda vremenski zahtjevna, to ne predstavlja problem u konacnom rješenju
zadatka jer je na racunalu dovoljno samo jednom pokrenuti rješavanje sustava jednadžbi offline (nakon
simulacije) kako bi se dobili željeni parametri koji se kasnije koriste u online simulaciji rada projektira-
nog sustava upravljanja
19
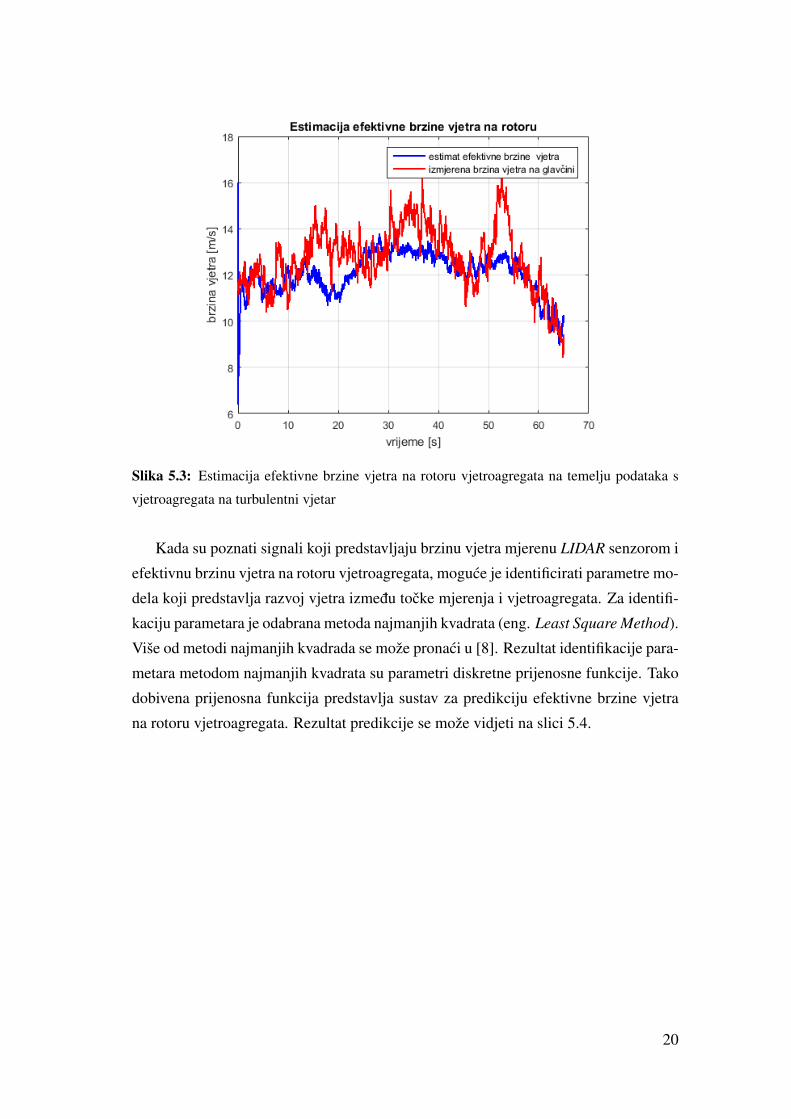
Slika 5.3: Estimacija efektivne brzine vjetra na rotoru vjetroagregata na temelju podataka s
vjetroagregata na turbulentni vjetar
Kada su poznati signali koji predstavljaju brzinu vjetra mjerenu LIDAR senzorom i
efektivnu brzinu vjetra na rotoru vjetroagregata, moguce je identificirati parametre mo-
dela koji predstavlja razvoj vjetra izmedu tocke mjerenja i vjetroagregata. Za identifi-
kaciju parametara je odabrana metoda najmanjih kvadrata (eng. Least Square Method).
Više od metodi najmanjih kvadrada se može pronaci u [8]. Rezultat identifikacije para-
metara metodom najmanjih kvadrata su parametri diskretne prijenosne funkcije. Tako
dobivena prijenosna funkcija predstavlja sustav za predikciju efektivne brzine vjetra
na rotoru vjetroagregata. Rezultat predikcije se može vidjeti na slici 5.4.
20
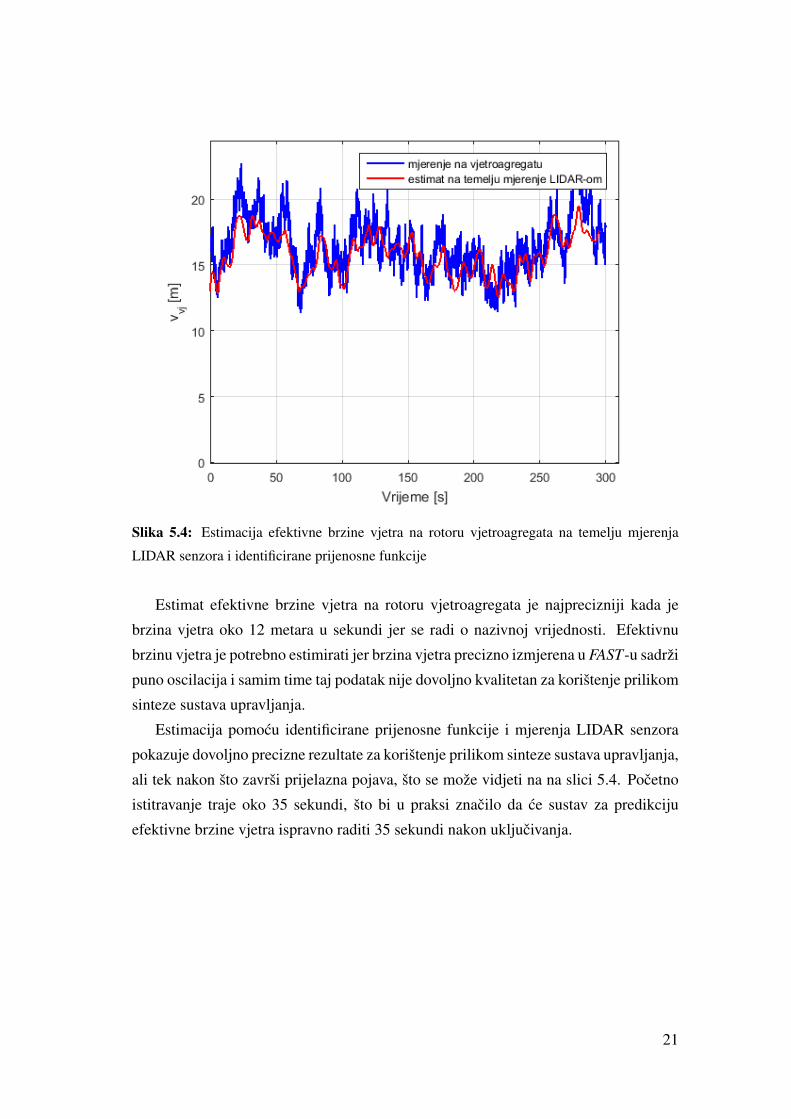
Slika 5.4: Estimacija efektivne brzine vjetra na rotoru vjetroagregata na temelju mjerenja
LIDAR senzora i identificirane prijenosne funkcije
Estimat efektivne brzine vjetra na rotoru vjetroagregata je najprecizniji kada je
brzina vjetra oko 12 metara u sekundi jer se radi o nazivnoj vrijednosti. Efektivnu
brzinu vjetra je potrebno estimirati jer brzina vjetra precizno izmjerena u FAST-u sadrži
puno oscilacija i samim time taj podatak nije dovoljno kvalitetan za korištenje prilikom
sinteze sustava upravljanja.
Estimacija pomocu identificirane prijenosne funkcije i mjerenja LIDAR senzora
pokazuje dovoljno precizne rezultate za korištenje prilikom sinteze sustava upravljanja,
ali tek nakon što završi prijelazna pojava, što se može vidjeti na na slici 5.4. Pocetno
istitravanje traje oko 35 sekundi, što bi u praksi znacilo da ce sustav za predikciju
efektivne brzine vjetra ispravno raditi 35 sekundi nakon ukljucivanja.
21
6. Sinteza modelskog prediktivnogregulatora
Cilj ovog rada je upravljati vjetroagregatom tako da se minimiziraju strukturna
opterecenja i maksimizira iskorištenje energije. U obzir se uzimaju i ogranicenja ak-
tuatora koja se ne smiju prekoraciti, a buduci da se koristi LIDAR senzor, regulator
takoder treba moci baratati s podacima o brzini vjetra koji stižu unaprijed. Modelski
prediktivni regulator (MPC) ispunjava sve zahtjeve za upravljanje vjetroagregatom. To
je online regulator koji se bazira na lineariziranom modelu vjetroagregata i ima mo-
gucnost ukljucivanja ogranicenja na upravljacke varijable i može baratati unaprijednim
mjerenjima, za razliku od standardnog linearnog regulatora. Modelski prediktivni re-
gulator funkcionira tako što u svakom diskretnom koraku simulacije estimira buduca
stanja sustava unutar predikcijskog horizonta koristeci se lineariziranim modelom. Es-
timirana stanja se otežavaju odredenim funkcijama otežanja i racunaju se optimalni
upravljacki signali unutar zadanih ogranicenja. Cijeli postupak se ponavlja za svaki
vremenski korak simulacije.
6.1. Korištenje modela vjetroagregata i mjerenja LIDAR
senzora u svrhu modelskog prediktivnog upravlja-
nja
Kao što je vec spomenuto, MPC zahtjeva poznavanje modela sustava. U tu
svrhu se koristi linearizirani model vjetroagregata. Pojednostavljeni nelinearni mo-
del vjetroagregata opisan je u poglavlju 4. Linearizacija modela se obavlja pomocu
programskog paketa FAST. Za linearizaciju pomocu FAST-a moguce je podesiti vari-
jable stanja mijenjanjem stupnjeva slobode modela u .fst ulaznoj datoteci. Takoder je
moguce odrediti izlaze, upravljacke signale i poremecaje , te dovesti sustav u željenu
radnu tocku. Sustav je lineariziran u više radnih tocki s razlicitim brzinama vjetra.
22
Time je omoguceno da regulator mijenja model za predikciju buducih stanja u ovis-
nosti o trenutnoj brzini vjetra i na taj nacin se povecava tocnost i efikasnost.
Kako bi se dodatno poboljšale performanse sustava upravljanja, koriste se mjerenja
LIDAR senzora kako bi se odredile karakteristike vjetra prije nego dode do vjetroagre-
gata. Podešenje LIDAR senzora za mjerenje brzine vjetra opisano je u poglavlju 5.1.2.
Za spremanje podataka o vjetru dobivenih na temelju simulacije mjerenja LIDAR sen-
zora koristi se spremnik koji sadrži podatke o vjetru u zadnjih 5 sekundi.
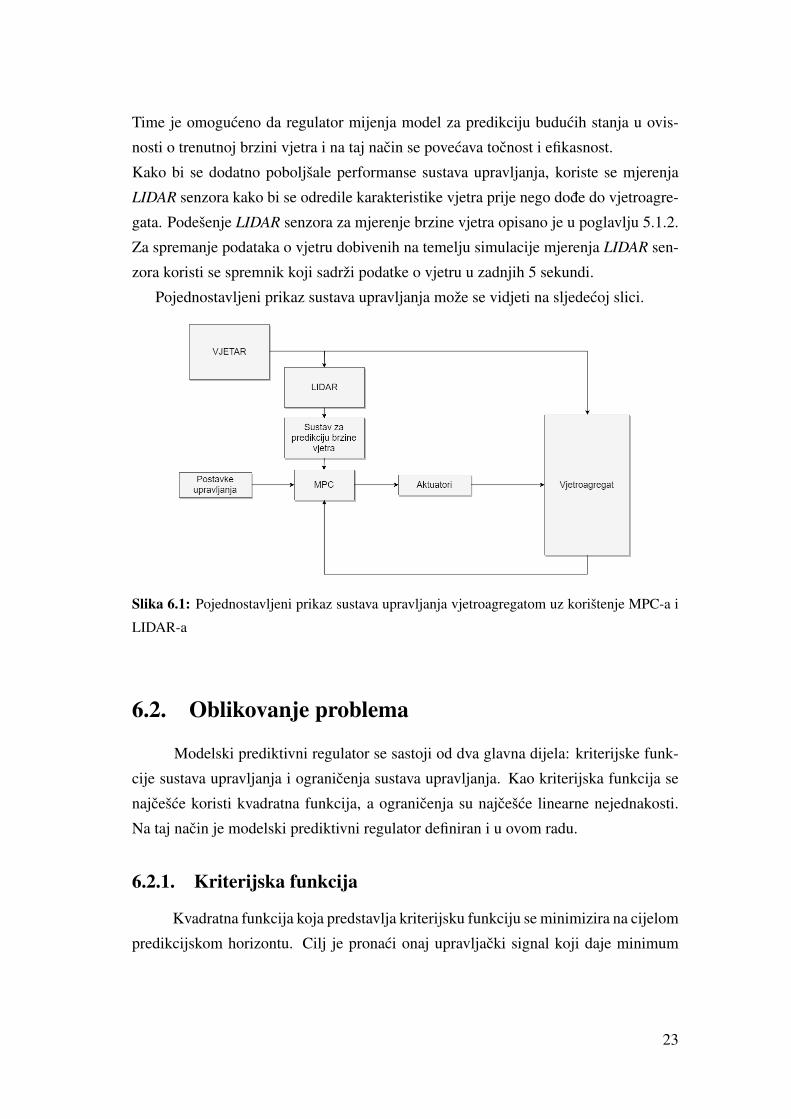
Pojednostavljeni prikaz sustava upravljanja može se vidjeti na sljedecoj slici.
Slika 6.1: Pojednostavljeni prikaz sustava upravljanja vjetroagregatom uz korištenje MPC-a i
LIDAR-a
6.2. Oblikovanje problema
Modelski prediktivni regulator se sastoji od dva glavna dijela: kriterijske funk-
cije sustava upravljanja i ogranicenja sustava upravljanja. Kao kriterijska funkcija se
najcešce koristi kvadratna funkcija, a ogranicenja su najcešce linearne nejednakosti.
Na taj nacin je modelski prediktivni regulator definiran i u ovom radu.
6.2.1. Kriterijska funkcija
Kvadratna funkcija koja predstavlja kriterijsku funkciju se minimizira na cijelom
predikcijskom horizontu. Cilj je pronaci onaj upravljacki signal koji daje minimum
23

kriterijske funkcije. Kriterijska funkcija u osnovnom obliku izgleda ovako:
J = minu
N∑k=1
xT (k)Qx(k) + uT (k)Ru(k), (6.1)
gdje je x(k) varijabla stanja u k-tom trenutku, a u(k) je upravljacki signal. N je duljina
predikcijskog horizonta.
Buduci da je model lineariziran, x(k) u gornjoj jednadžbi predstavlja odstupanje
sustava od radne tocke. Matrice koje opisuju linearizirani model u prostoru stanja je
potrebno diskretizirati kako bi se s njima lakše radilo na racunalu. Sljedeca jednadžba
opisuje linearizirani model sustava koji se koristi u modelskom prediktivnom regula-
toru. Matrice koje opisuju diskretizirani sustav imaju indeks d.
∆x(k + 1) = Ad∆x(k) +Bd∆u(k) +BDd∆d(k) (6.2)
Matrica BDd opisuje vladanje poremecaja d(k) na sustav. Poremecaj u ovom slu-
caju je brzina vjetra.
Ako se za kriterijsku funkciju umjesto vektora x(k) uzme odstupanje varijabli sta-
nja od reference, tada jednadžba (6.1) poprima oblik:
J = minu
N∑k=1
(x(k) − xref )TQ(x(k) − xref ) + uT (k)Ru(k), (6.3)
što nakon sredivanja prelazi u:
J = minu
N∑k=1
xT (k)Qx(k) − 2xTrefQx(k) + xTrefQxref + uT (k)Ru(k). (6.4)
Clan xTrefQxref i izrazu (6.3) se može zanemariti jer ne ovisi o upravljackom sig-
nala i samim time ne mijenja vrijednost kriterija. Kao upravljacke varijable su uzete
derivacije momenta generatora i kuta zakreta lopatica i može se zakljuciti da je njihova
vrijednost u radnoj tocki jednaka 0.
Težinski koeficijenti se nalaze na dijagonalama dijagonalnih matrica Q i R. Pode-
šavanjem koeficijenata se nalazi kompromis izmedu dva zahtjeva. Naime, ako matrica
Q sadrži vece koeficijente od matrice R, tada se veca važnost daje pracenju reference,
ali uz vece upravljacke signale. U obrnutom slucaju penaliziranje upravljackih signala
je manjeg iznosa, što smanjuje pritisak na aktuatore, ali se tada lošije prati referenca
[9].
24
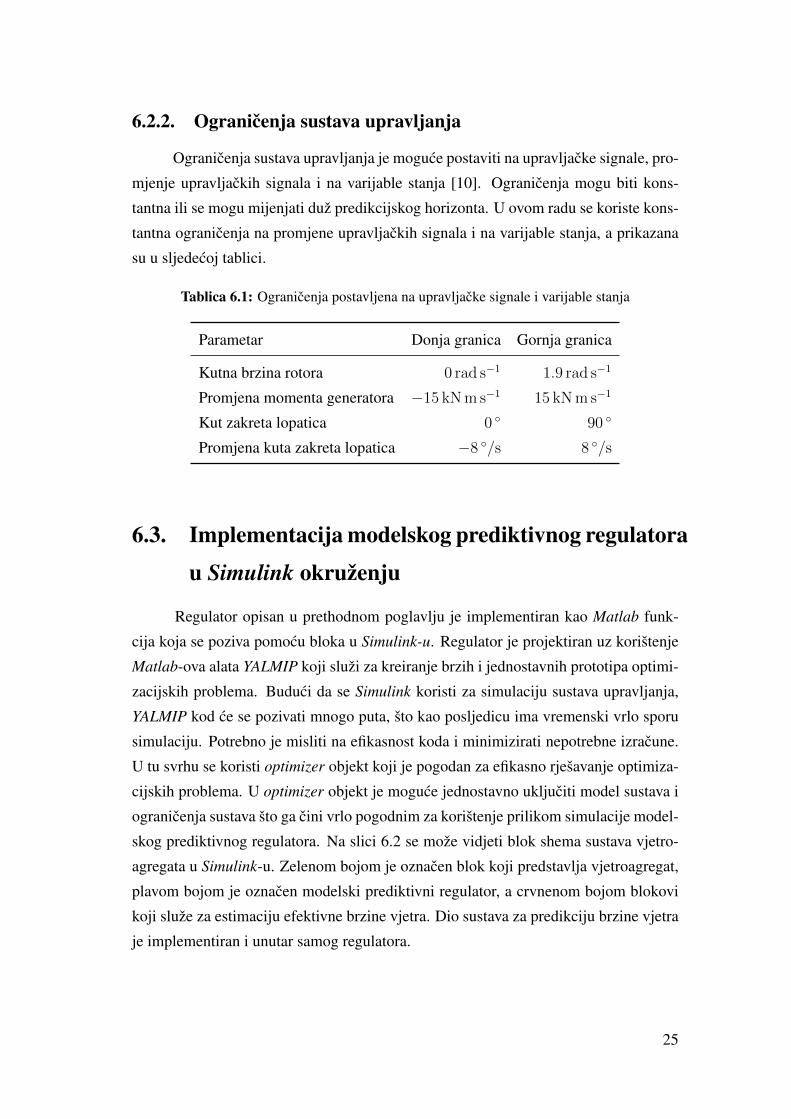
6.2.2. Ogranicenja sustava upravljanja
Ogranicenja sustava upravljanja je moguce postaviti na upravljacke signale, pro-
mjenje upravljackih signala i na varijable stanja [10]. Ogranicenja mogu biti kons-
tantna ili se mogu mijenjati duž predikcijskog horizonta. U ovom radu se koriste kons-
tantna ogranicenja na promjene upravljackih signala i na varijable stanja, a prikazana
su u sljedecoj tablici.
Tablica 6.1: Ogranicenja postavljena na upravljacke signale i varijable stanja
Parametar Donja granica Gornja granica
Kutna brzina rotora 0 rad s−1 1.9 rad s−1
Promjena momenta generatora −15 kN m s−1 15 kN m s−1
Kut zakreta lopatica 0 90
Promjena kuta zakreta lopatica −8 /s 8 /s
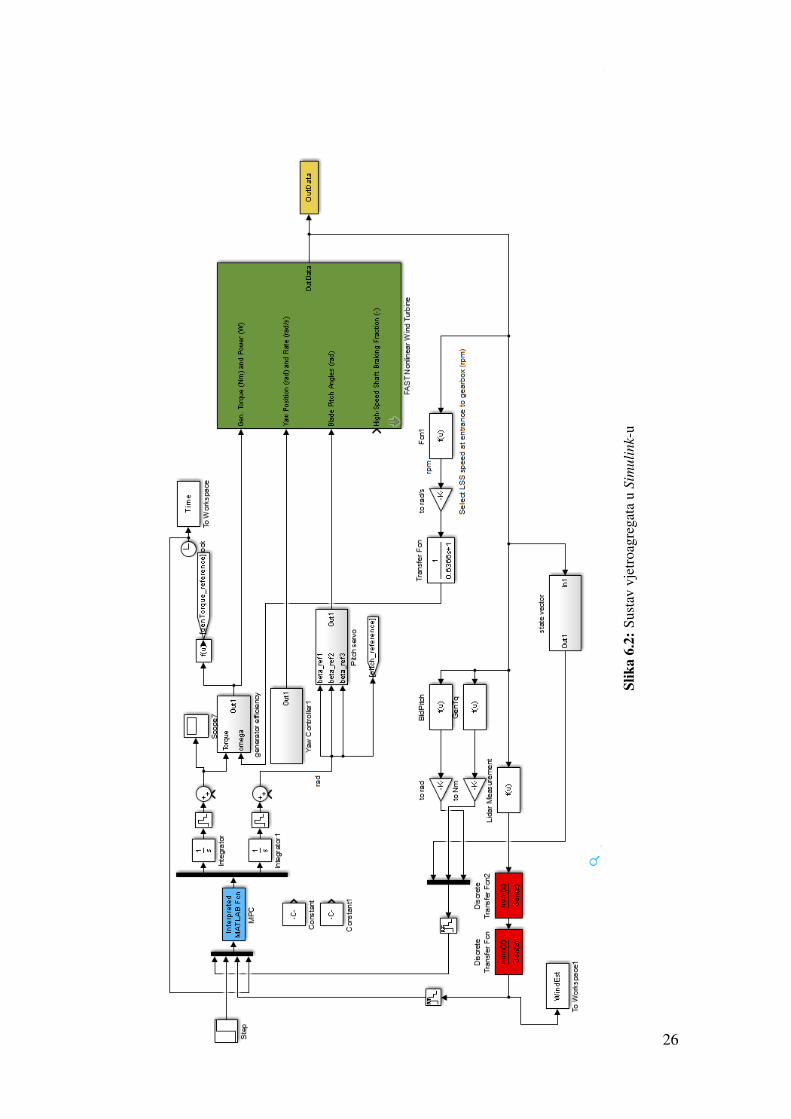
6.3. Implementacija modelskog prediktivnog regulatora
u Simulink okruženju
Regulator opisan u prethodnom poglavlju je implementiran kao Matlab funk-
cija koja se poziva pomocu bloka u Simulink-u. Regulator je projektiran uz korištenje
Matlab-ova alata YALMIP koji služi za kreiranje brzih i jednostavnih prototipa optimi-
zacijskih problema. Buduci da se Simulink koristi za simulaciju sustava upravljanja,
YALMIP kod ce se pozivati mnogo puta, što kao posljedicu ima vremenski vrlo sporu
simulaciju. Potrebno je misliti na efikasnost koda i minimizirati nepotrebne izracune.
U tu svrhu se koristi optimizer objekt koji je pogodan za efikasno rješavanje optimiza-
cijskih problema. U optimizer objekt je moguce jednostavno ukljuciti model sustava i
ogranicenja sustava što ga cini vrlo pogodnim za korištenje prilikom simulacije model-
skog prediktivnog regulatora. Na slici 6.2 se može vidjeti blok shema sustava vjetro-
agregata u Simulink-u. Zelenom bojom je oznacen blok koji predstavlja vjetroagregat,
plavom bojom je oznacen modelski prediktivni regulator, a crvnenom bojom blokovi
koji služe za estimaciju efektivne brzine vjetra. Dio sustava za predikciju brzine vjetra
je implementiran i unutar samog regulatora.
25
Slik
a6.
2:Su
stav
vjet
roag
rega
tau
Sim
ulin
k-u
26
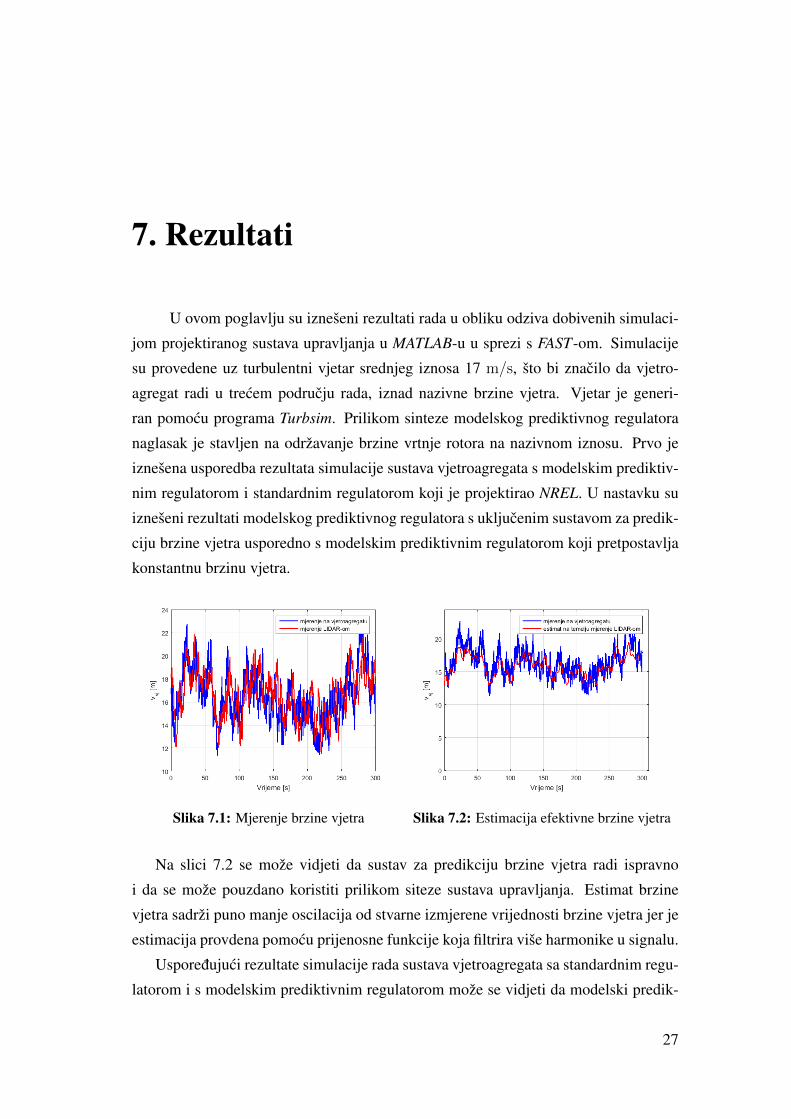
7. Rezultati
U ovom poglavlju su iznešeni rezultati rada u obliku odziva dobivenih simulaci-
jom projektiranog sustava upravljanja u MATLAB-u u sprezi s FAST-om. Simulacije
su provedene uz turbulentni vjetar srednjeg iznosa 17 m/s, što bi znacilo da vjetro-
agregat radi u trecem podrucju rada, iznad nazivne brzine vjetra. Vjetar je generi-
ran pomocu programa Turbsim. Prilikom sinteze modelskog prediktivnog regulatora
naglasak je stavljen na održavanje brzine vrtnje rotora na nazivnom iznosu. Prvo je
iznešena usporedba rezultata simulacije sustava vjetroagregata s modelskim prediktiv-
nim regulatorom i standardnim regulatorom koji je projektirao NREL. U nastavku su
iznešeni rezultati modelskog prediktivnog regulatora s ukljucenim sustavom za predik-
ciju brzine vjetra usporedno s modelskim prediktivnim regulatorom koji pretpostavlja
konstantnu brzinu vjetra.
Slika 7.1: Mjerenje brzine vjetra Slika 7.2: Estimacija efektivne brzine vjetra
Na slici 7.2 se može vidjeti da sustav za predikciju brzine vjetra radi ispravno
i da se može pouzdano koristiti prilikom siteze sustava upravljanja. Estimat brzine
vjetra sadrži puno manje oscilacija od stvarne izmjerene vrijednosti brzine vjetra jer je
estimacija provdena pomocu prijenosne funkcije koja filtrira više harmonike u signalu.
Usporedujuci rezultate simulacije rada sustava vjetroagregata sa standardnim regu-
latorom i s modelskim prediktivnim regulatorom može se vidjeti da modelski predik-
27
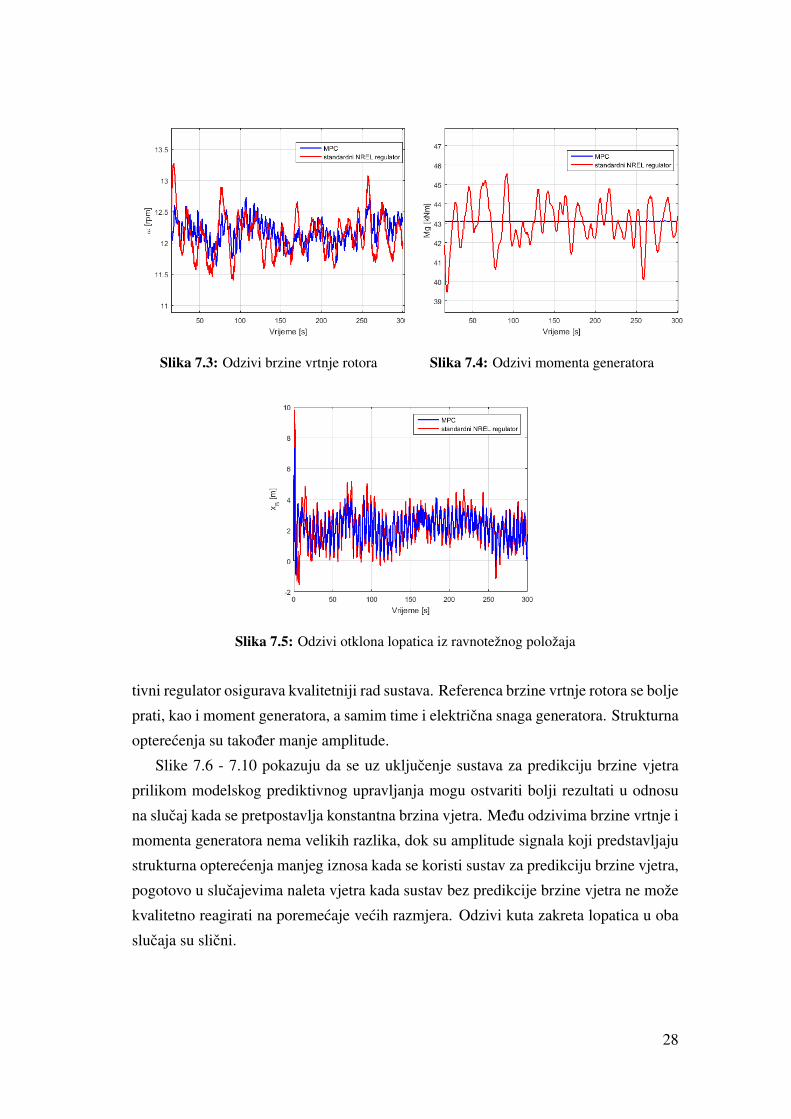
Slika 7.3: Odzivi brzine vrtnje rotora Slika 7.4: Odzivi momenta generatora
Slika 7.5: Odzivi otklona lopatica iz ravnotežnog položaja
tivni regulator osigurava kvalitetniji rad sustava. Referenca brzine vrtnje rotora se bolje
prati, kao i moment generatora, a samim time i elektricna snaga generatora. Strukturna
opterecenja su takoder manje amplitude.
Slike 7.6 - 7.10 pokazuju da se uz ukljucenje sustava za predikciju brzine vjetra
prilikom modelskog prediktivnog upravljanja mogu ostvariti bolji rezultati u odnosu
na slucaj kada se pretpostavlja konstantna brzina vjetra. Medu odzivima brzine vrtnje i
momenta generatora nema velikih razlika, dok su amplitude signala koji predstavljaju
strukturna opterecenja manjeg iznosa kada se koristi sustav za predikciju brzine vjetra,
pogotovo u slucajevima naleta vjetra kada sustav bez predikcije brzine vjetra ne može
kvalitetno reagirati na poremecaje vecih razmjera. Odzivi kuta zakreta lopatica u oba
slucaja su slicni.
28
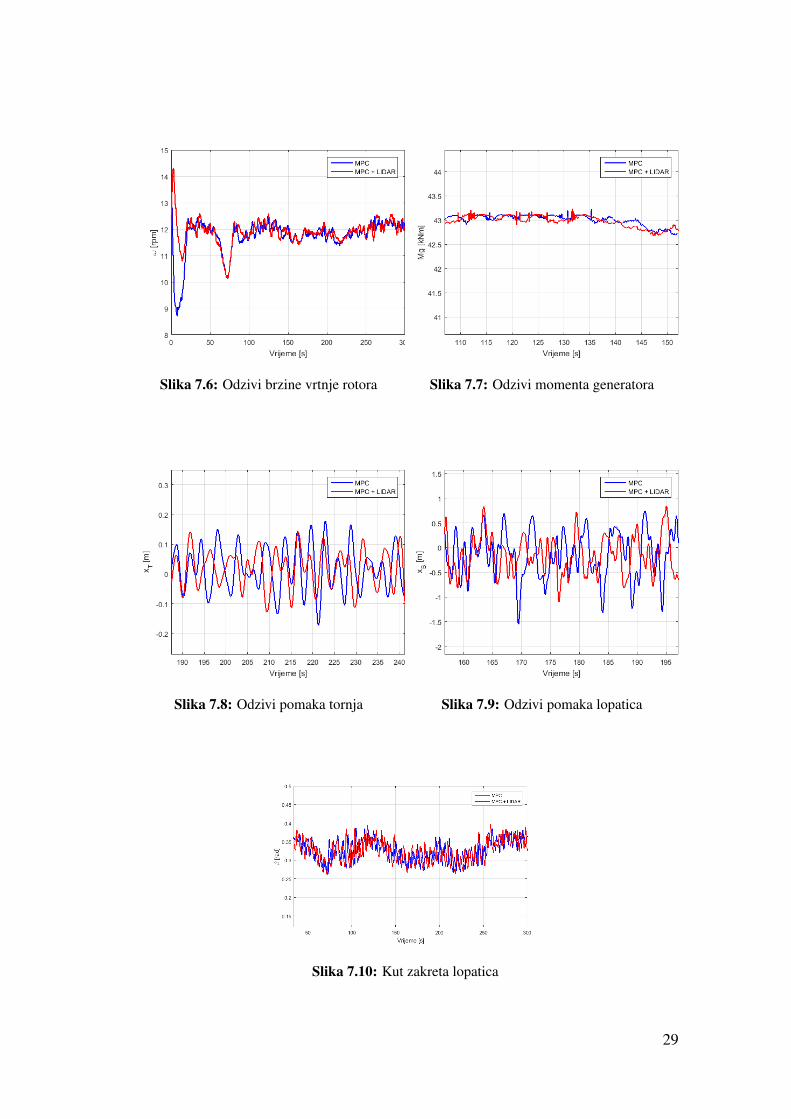
Slika 7.6: Odzivi brzine vrtnje rotora Slika 7.7: Odzivi momenta generatora
Slika 7.8: Odzivi pomaka tornja Slika 7.9: Odzivi pomaka lopatica
Slika 7.10: Kut zakreta lopatica
29
8. Zakljucak
Rezultati u prethodnom poglavlju pokazuju da je moguce ostvariti optimalno
upravljanje vjetroagregatom uz korištenje modelskog prediktivnog regulatora u sprezi
sa sustavom za estimaciju brzine vjetra temeljenom na mjerenjima LIDAR senzora.
Ono što se pokazalo kljucno za pravilan rad modelskog prediktivnog regulatora
je pravilan odabir lineariziranog modela sustava. Ako se odabere pogrešan model,
modelski prediktivni regulator ce na izlazu davati neispravan upravljacki signal, što
uzrokuje loš rad sustava upravljanja i nepoželjno djelovanje na vjetroagregat. Poželjno
je sustav linearizirati u što više radnih tocki kako bi se vjetroagregatom moglo kvaliteto
upravljati u cijelom njegovom radnom podrucju.
U ovom radu je razvijen sustav za estimaciju brzine vjetra koji služi za procjenu
brzine vjetra prije nego vjetar dode do vjetroagregata. Poznavanje informacija o vjetru
prije nego dode do vjetroagregata omogucava kvalitetniji rad modelskog prediktivnog
regulatora jer je moguce u svaki korak predikcije stanja sustava ukljuciti i poremecaj
u obliku vjetra cija je brzina precizno estimirana. Kao rezultat se dobije regulator koji
osigurava kvalitetniji rad sustava od onoga koji pretpostavlja konstantnu brzinu vjetra
duž predikcijskog horizonta.
U buducem radu bilo bi poželjno preciznije estimirati brzinu vjetra i koristiti line-
arizirane modele sustava za više radnih tocki, što bi dovelo do kvalitetnijeg vladanja
sustava upravljanja. Takoder se može u optimizacijski problem ukljuciti i sile i mo-
mente koji predstavljaju strukturna opterecenja sustava kako bi se smanjilo trošenje
dijelova strukture vjetroagregata. Bolje vladanje sustava se može postici i preciznijim
odabirom težinskih koeficijenata u kriterijskoj funkciji.
30
LITERATURA
[1] “Senvion wind energy solutions.” https://www.senvion.com/global/
en/.
[2] A. W. Andrew Scholbrock, Paul Fleming and N. Wang, eds., Lidar-Enhanced
Wind Turbine Control: Past, Present, and Future, National Renewable Energy
Laboratory, 2016 American Control Conference Boston, Massachusetts, 2016.
[3] M. Car, “Upravljanje vjetroagregatom s predupravljanjem po estimatu efektiv-
nog vjetra,” Master’s thesis, Fakultet elektrotehnike i racunarstva Sveucilišta u
Zagrebu, 2014.
[4] A. Körber, Extreme and Fatigue Load Reducing Control for Wind Turbines: A
Model Predictive Control Approach using Robust State Constraints. PhD thesis,
Fakultät III - Prozesswissenschaften der Technischen Universität Berlin, 2014.
[5] W. M. J. Jonkman, S. Butterfield and G. Scott, Definition of a 5-MW Reference
Wind Turbine for Offshore System Development. NREL, 2009.
[6] D. Schlipf, “Nonlinear model predictive control of wind turbines using lidar,”
2016.
[7] “Bisekcijska metoda.” http://www.codewithc.com/
bisection-method-algorithm-flowchart/.
[8] I. P. Nedjeljko Peric, “Teorija estimacije - parametarski postupci identifikacije.”
[9] T. Bego, “Optimalno upravljanje vjetroagregatom uz ogranicavanje strukturnih
opterecenja,” Master’s thesis, Fakultet elektrotehnike i racunarstva Sveucilišta u
Zagrebu, 2016.
[10] J. F. Mathias B. Madsen, “Preview-based Asymmetric Load Reduction of Wind
Turbines,” Master’s thesis, Department of Electronic Systems, Aalborg Univer-
sity, 2012.
31
Dodatak ASimulacija LIDAR senzora pomocuFAST-a i Simulink-a
Aerolasticni simulator od verzije FAST v8 podržava simulaciju mjerenja LIDAR
senzorom unutar Simulink sucelja. Potrebno je napraviti sljedece promjene u Simulink
sucelju kako bi se LIDAR modul pravilno simulirao.
Prvo je potrebno podesiti parametre S-funkcije unutar bloka "S-function" u Simulink
modelu vjetroagregata. Parametar NumAddInputs je potrebno postaviti na 3 kako bi
se simulirao LIDAR, cija ce se simulirana mjerenja naci u izlaznom kanalu pod nazi-
vom "WindMeas1". Kada je NumAddInputs postavljen u 3, simulator ocekuje taj treci
parametar u obliku polja koje se koristi za inicijalizaciju LIDAR modula:
[3, UseLIDAR,LidRadialV ];
UseLIDAR =
0, za mjerenje u jednoj tocki (bez LIDAR-a);
1, za simulaciju CW LIDAR-a;
LidRadialV =
0, za estimaciju brzine u x smjeru;
1, za estimaciju radijalne brzine vjetra.
Na slici A.1 se može vidjeti prozor u kojem se podešavaju parametri S-funkcije unutar
Simulink-a.
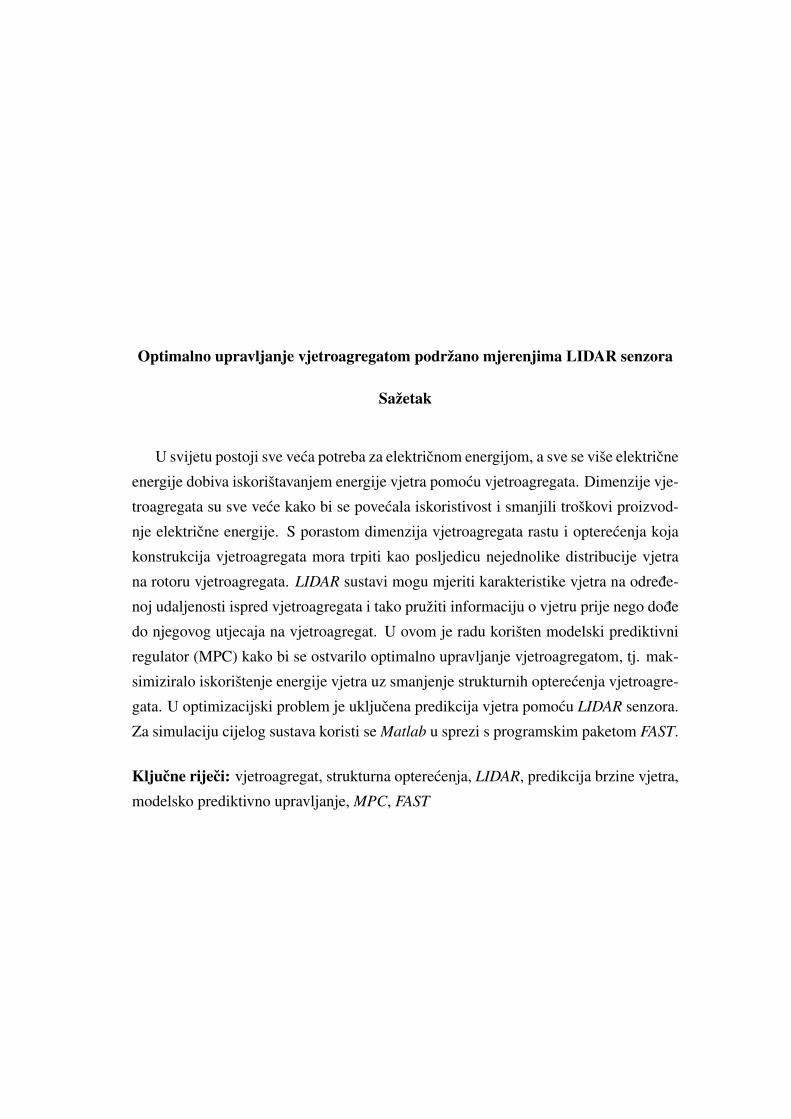
Nakon što su parametri S-funkcije postavljeni za simuliranje LIDAR modula,
potrebno je dodati tri dodatna ulaza, uz vec postojecih 8:
9) pozicija fokusa za LIDAR u X smjeru
10) pozicija fokusa za LIDAR u Y smjeru
11) pozicija fokusa za LIDAR u Z smjeru.
32
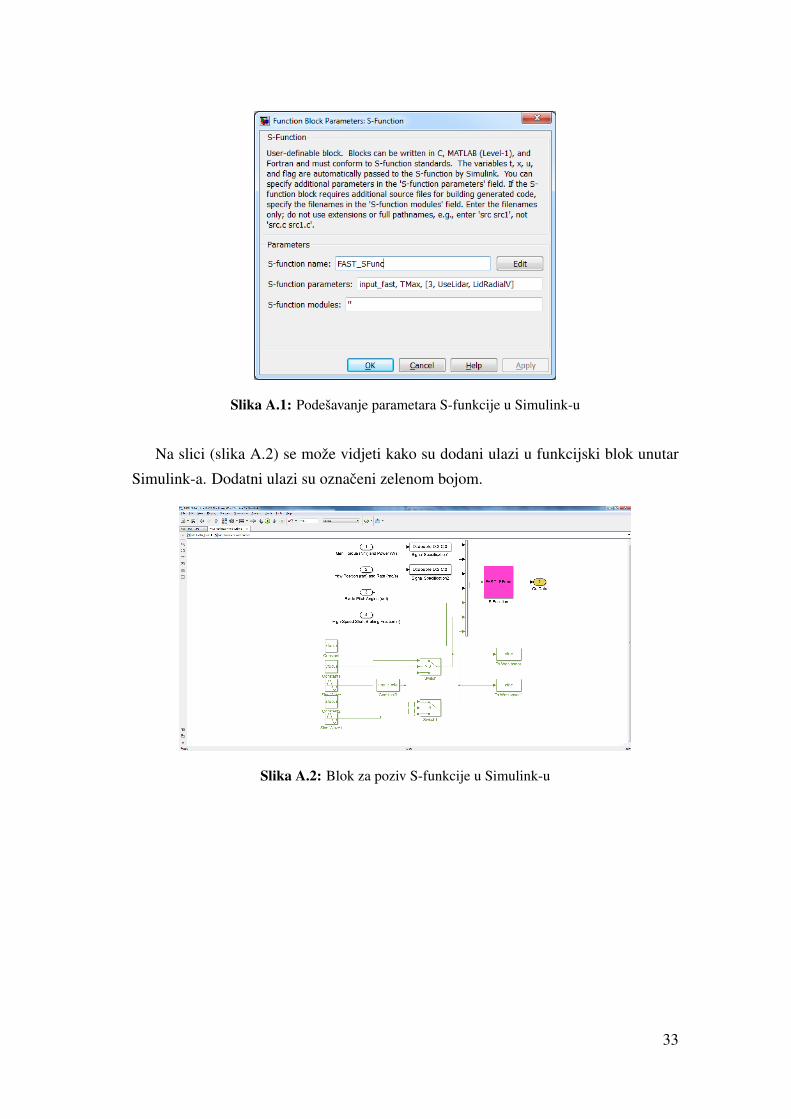
Slika A.1: Podešavanje parametara S-funkcije u Simulink-u
Na slici (slika A.2) se može vidjeti kako su dodani ulazi u funkcijski blok unutar
Simulink-a. Dodatni ulazi su oznaceni zelenom bojom.
Slika A.2: Blok za poziv S-funkcije u Simulink-u
33
Optimalno upravljanje vjetroagregatom podržano mjerenjima LIDAR senzora
Sažetak
U svijetu postoji sve veca potreba za elektricnom energijom, a sve se više elektricne
energije dobiva iskorištavanjem energije vjetra pomocu vjetroagregata. Dimenzije vje-
troagregata su sve vece kako bi se povecala iskoristivost i smanjili troškovi proizvod-
nje elektricne energije. S porastom dimenzija vjetroagregata rastu i opterecenja koja
konstrukcija vjetroagregata mora trpiti kao posljedicu nejednolike distribucije vjetra
na rotoru vjetroagregata. LIDAR sustavi mogu mjeriti karakteristike vjetra na odrede-
noj udaljenosti ispred vjetroagregata i tako pružiti informaciju o vjetru prije nego dode
do njegovog utjecaja na vjetroagregat. U ovom je radu korišten modelski prediktivni
regulator (MPC) kako bi se ostvarilo optimalno upravljanje vjetroagregatom, tj. mak-
simiziralo iskorištenje energije vjetra uz smanjenje strukturnih opterecenja vjetroagre-
gata. U optimizacijski problem je ukljucena predikcija vjetra pomocu LIDAR senzora.
Za simulaciju cijelog sustava koristi se Matlab u sprezi s programskim paketom FAST.
Kljucne rijeci: vjetroagregat, strukturna opterecenja, LIDAR, predikcija brzine vjetra,
modelsko prediktivno upravljanje, MPC, FAST

Optimal wind turbine control supported with LIDAR sensor measurements
Abstract
The increasing energy production by wind turbines is induced by the ever incre-
asing growth in demand for electric energy. To meet those demands the efficiency
of the energy production should be improved and the costs should be reduced. As
a consequence, the wind turbine sizes are constantly increasing. Unfortunately, the
aerodynamic loadings caused by a non-uniform wind distribution on the wind turbine
rotor are consequently becoming an increasing concern. Since LIDAR systems can
obtain a preview of wind measurements they can provide information about wind cha-
racteristics before the wind turbine is affected by it. In this thesis a Model Predictive
Controller (MPC) is developed for optimal wind turbine control in order to maximize
electrical energy production and reduce fatigue structural loads. The optimization pro-
blem utilizes preview LIDAR measurements. The designed controller is tested in Ma-
tlab coupled with FAST simulation software.
Keywords: wind turbine, structural loads, LIDAR, wind speed estimation, model pre-
dictive control, MPC, FAST







![02 - Mjerenje [Način kompatibilnosti] - Mjerenje.pdf · mjerna skala i vrsta mjerenja. Skale mjerenja =Skale mjerenja = mjernemjerne skale skale • Pri različitim mjerenjima koriste](https://img.pdfslide.tips/doc/110x75/5d1f720188c993ce268cdeb7/02-mjerenje-nacin-kompatibilnosti-mjerna-skala-i-vrsta-mjerenja-skale.jpg)





















