-
1
MEKANISME KALIBRASI TERRESTRIAL LASER SCANNER
[Calibration Mechanism for Terrestrial Laser Scanner]
Rahman Adhitiaputra1), Hasanuddin Z. Abidin2), Irwan Gumilar2),
Nia Haerani2)
1) Mahasiswa S1 Teknik Geodesi dan Geomatika, Institut Teknologi
Bandung
2) Kelompok Keahlian Geodesi, Institut Teknologi Bandung
Institut Teknologi Bandung
Teknik Geodesi dan Geomatika, Institut Teknologi Bandung
Jalan Ganesha No. 10, Bandung, Indonesia
[email protected]
ABSTRAK
Dalam setiap pengukuran yang dilakukan pasti memiliki kesalahan,
salah satunya berasal dari dalam alat yang digunakan. Kesalahan ini
biasa disebut kesalahan sistematis. Untuk meminimalkan pengaruh
dari kesalahan sistematis alat, dapat dilakukan suatu proses
kalibrasi terhadap alat ukur yang digunakan. Dalam penelitian ini,
alat yang akan dikalibrasi adalah Terrestrial Laser Scanner (TLS).
Dikarenakan TLS merupakan alat yang memiliki teknologi baru, belum
terdapat metode kalibrasi yang dibakukan. Menurut Optical Test and
Calibration Ltd, kalibrasi merupakan pengecekan akurasi data dengan
membandingkannya dengan ukuran yang yang dianggap benar. Dalam
penelitian ini, kalibrasi yang akan dilakukan adalah dengan
membandingkan data hasil pengukuran TLS dengan data hasil
pengukuran ETS atau yang dianggap benar.
Dalam proses pelaksanaannya, kalibrasi dilakukan di dalam suatu
ruangan yang telah dipasang target-target yang akan dijadikan obyek
pengukuran. Akuisisi data dengan TLS diawali dengan melakukan
pemindaian target-target tersebut kemudian dilanjutkan oleh
pemindaian ruangan. Sedangkan akuisisi data dengan ETS hanya
dilakukan dengan melakukan pengukuran terhadap target-target yang
ada. Hasil akuisisi data dari kedua alat tersebut kemudian diolah
hingga mendapatkan data hasil yang akan dibandingkan, yaitu data
jarak ruang dan koordinat target yang dihasilkan. Selisih dari
hasil perbandingan tersebut akan dianggap sebagai nilai kesalahan
pengukuran dari TLS. Dari hasil penelitian ini, selisih rata-rata
ukuran jarak ruang yang didapatkan adalah sebesar 4 mm, sedangkan
selisih rata-rata nilai koordinat target yang dihasilkan adalah
sebesar -4 mm pada sumbu-e (easting), -2 mm pada sumbu-n (northing)
dan -3,2 cm pada sumbu-u (up).
Kata Kunci : Kalibrasi, Terrestrial Laser Scanner (TLS),
Electronic Total Station (ETS)
-
2
ABSTRACT
Every measurement performed must have an error, one of them is
derived from the inside of instrument used. This error usually
called as systematical error. In order to minimize the effects of
systematical error, some calibration can applied to the instrument.
In this research, the instrument will be calibrated is Terrestrial
Laser Scanner (TLS). Since TLS is an instrument within new
technology, there is no standardized method of TLS calibration.
According to Optical Test and Calibration Ltd, calibration is the
activity of checking, by comparison with a standard, the accuracy
of a measuring instrument of any type. So, in this reaserch, the
calibration will be carried out is by comparing the measurement
results of TLS with the measurement results of ETS which is has a
true measurement results.
In the process of its implementation, the calibration is
performed in a room that has been set targets that will become the
object of measurement. Data acquisition with TLS is started by
scanning the target and followed by scanning the room. The
acquisition of data with the ETS is only done by measure the
existing target. The results from these two data acquisition are
then processed to obtain the data to be compared, i.e. the data
range and target coordinates result. The difference between the
results of the comparison shall be considered as the value of the
measurement error of the TLS. From this research, the average value
of distance differences is 4 mm and the average value of targets
coordinate differences are -4 mm on e-axis (easting), -2 mm on
n-axis (northing), and -3.2 m on u-axis (up).
Keywords : Calibration, Terrestrial Laser Scanner (TLS),
Electronic Total Station (ETS)
1. PENDAHULUAN
Geodesi merupakan disiplin ilmu yang mempelajari tentang
pengukuran dan perepresentasian Bumi dan benda-benda langit
lainnya, termasuk medan gaya beratnya masing-masing, dalam ruang
tiga dimensi yang berubah terhadap waktu (International Association
of Geodesy, 1979). Dalam suatu pengukuran, suatu alat ukur pasti
memiliki kesalahan-kesalahan, salah satunya berasal dari dalam alat
itu sendiri yang dapat mempengaruhi hasil pengukuran atau
menjadikan hasil pengukuran menjadi salah. Kesalahan ini sering
disebut sebagai kesalahan sistematis atau kesalahan instrumen.
Untuk meminimal-kan pengaruh sistematis dari kesalahan instrumen,
instrumen atau alat ukur yang digunakan harus dikalibrasi dan hasil
pengamatan/pengukuran harus dikoreksi berdasarkan parameter
kalibrasi yang didapat (INGENSAND dkk, 2003).
Kalibrasi perlu dilakukan kepada setiap alat ukur sekalipun alat
ukur tersebut merupakan alat ukur yang memiliki teknologi baru.
Alat
ukur yang akan dikalibrasi dalam penulisan ini adalah
Terrestrial Laser Scanner (TLS). TLS merupakan suatu alat ukur
terestris berteknologi baru yang merupakan perkembangan dari alat
ukur Electronic Total Station (ETS). TLS merupakan suatu alat
pencitraan aktif yang dapat dengan cepat mendapatkan satu set titik
3-D (Point Clouds) dari suatu permukaan atau objek dalam satu kali
pengamatan, berbeda dengan ETS yang hanya mendapatkan satu titik
dalam satu kali pengamatan. Hampir sama dengan teknik pengukuran
Close-Range Photogrammetry, salah satu tujuan penggunaan TLS yaitu
untuk memodelkan objek yang sudah ada ke dalam bentuk 3-D, atau
sering disebut reverse engineering. Hasil dari pemodelan ini
kemudian dapat digunakan lebih lanjut untuk kegunaan-kegunaan
praktis dalam bidang geodesi, seperti pengukuran volume, pemantauan
deformasi dan kestabilan kemiringan, dan lain-lain.
Dalam teknik survei dengan menggunakan TLS, kalibrasi sangat
penting dan merupakan prasyarat untuk mengekstraksi
-
3
informasi metrik 3-D secara teliti dan dapat dipercaya dari
point clouds yang didapatkan (Remondino dan Fraser, 2006). Namun
dikarenakan teknik pengukuran antara TLS dengan alat ukur terestris
lainnya berbeda, teknik kalibrasi untuk mengeliminasi kesalahan
sistematis pada TLS pun berbeda pula. Dikutip dari Optical Test and
Calibrarion Ltd, kalibrasi merupakan suatu kegiatan pengecekan
akurasi data yang dihasilkan oleh suatu alat dengan
membandingkannya dengan ukuran yang distandarkan atau yang dianggap
benar. Dikarenakan belum terdapat ukuran yang distandarkan dalam
suatu pengukuran dengan menggunakan TLS, dalam kalibrasi TLS ini
akan digunakan data pengukuran ETS sebagai data ukuran yang
dianggap benar.
Ada pun tujuan dari dari penelitian ini, yaitu melakukan
kalibrasi terhadap instrumen TLS dengan menentukan besarnya
perbedaan antara jarak ruang dan koordinat hasil pengukuran yang
didapatkan dengan TLS dengan ETS; serta menentukan keefektifan
metode kalibrasi yang digunakan terhadap instrumen TLS yang
digunakan dalam pengujian kalibrasi.
2. METODOLOGI
Terrestrial Laser Scanner merupakan suatu alat pencitraan aktif
menggunakan laser yang dapat dengan cepat mendapatkan satu set
titik (Point clouds) dari suatu permukaan atau objek yang dilakukan
dalam satu kali pengamatan. Point clouds merupakan sekumpulan titik
dalam sistem koordinat tiga dimensi yang mana juga juga memberikan
informasi tambahan berupa warna atau nilai reflektivitas (Quintero
dkk, 2008) TLS yang digunakan dalam penulisan ini memiliki prinsip
pengukuran jarak berbasis pulsa, yaitu melakukan pengukuran jarak
dengan menggunakan waktu tempuh laser mulai dipancarkan hingga
kembali lagi ke alat. Untuk mendapatkan suatu nilai koordinat dari
suatu titik atau obyek, data ukuran yang didapatkan dari hasil
pengukuran TLS
adalah jarak, sudut vertikal, dan sudut horizontal. Ada pun
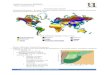
metodologi yang akan digunakan dalam pelaksanaan kalibrasi TLS pada
penelitian ini yang akan ditampilkan dalam visualisasi skematik
metodologi pada Gambar 2.1
Gambar 2.1. Visualisasi skematik metodologi kalibrasi TLS
2. 1 Persiapan
Dalam tahap persiapan dilakukan beberapa kegiatan dalam
pelaksanaan penelitian, seperti pembuatan proposal Tugas Akhir,
pelatihan pengoperasian dan pengolahan data dengan TLS dan
pengumpulan referensi atau literatur yang akan digunakan dalam
penyusunan Tugas Akhir ini. Literatur yang akan digunakan berasal
dari buku teks dan jurnal ilmiah yang tersedia. Semua literatur
yang didapatkan dianalisis dan kemudian disimpulkan menjadi suatu
metode kalibrasi TLS yang nantinya akan dipraktikkan.
-
4
2. 2 Persiapan Kalibrasi
Dalam tahap ini, proses akuisisi data akan segera dilakukan.
Diperlukan persiapan-persiapan seperti penyiapan alat ukur TLS dan
ETS yang akan digunakan beserta peralatan-peralatan penunjang
lainnya. Selain itu dilakukan pula penyiapan ruangan yang akan
dijadikan tempat melaksanakan kalibrasi TLS. Ruangan yang akan
digunakan dalam pelaksanaan kalibrasi ini adalah Ruang 3103-3104,
Gedung Labtek IX C, Institut Teknologi Bandung. Sebelum pelaksanaan
kalibrasi dilakukan, ruangan yang akan digunakan dikondisikan
terlebih dahulu dan target-target dipasang menyebar mengelilingi
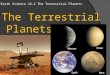
seluruh ruangan, seperti yang terdapat pada Gambar 2.2. Jumlah
target yang dipasang dalam ruangan tersebut berjumlah 43
target.
Gambar 2.2. Posisi penempatan target dalam R.3103-3104
2. 3 Akuisisi Data dengan TLS
Dalam melaksanakan akuisisi data dengan menggunakan TLS,
penentuan posisi sangatlah penting dalam melakukan
pemindaian. Dalam menentukan posisi pemindaian, dibutuhkan
pertimbangan dalam memilih sudut pandang posisi pemindaian dengan
target-target yang ada. Hal ini dilakukan agar setiap posisi
pemindaian dapat memindai target yang ada semaksimal mungkin dengan
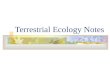
kualitas pemindaian yang baik. Terdapat empat posisi pemindaian TLS
dalam penelitian ini dan keempat posisi pemindaian tersebut akan
ditampilkan pada Gambar 2.3.
Gambar 2.3. Keempat posisi pemindaian TLS
Dalam akuisisi data dengan TLS, hal yang pertama dilakukan
adalah memindai target-target yang ada dari empat posisi
pemindaian. Target yang dipindai harus memiliki kualitas pemindaian
yang baik, yaitu mampu memberikan titik tengah target secara tepat
seperti pada Gambar 2.4. Target yang memiliki kualitas pemindaian
yang baik akan disimpan, sedangkan yang tidak akan dipindai
kembali. Setelah melakukan pemindaian target, dilakukan pemindaian
keseluruhan ruangan dari setiap posisi pemindaian.
-
5
Gambar 2.4. Contoh hasil pemindaian target yang baik
2. 4 Akuisisi Data dengan ETS
Proses akuisisi data dengan menggunakan ETS dilakukan seperti
melakukan pengukuran titik detil. ETS yang digunakan dalam akuisisi
data ini merupakan ETS berjenis reflectorless. Akuisisi data dengan
ETS diawali dan diakhiri dengan melakukan kalibrasi ETS dengan
melakukan pengecekan kesalahan alat. Hal ini dilakukan agar data
pengukuran ETS dapat memiliki hasil ukuran yang dianggap benar,
sebagai-mana yang akan digunakan sebagai data pembanding ukuran
TLS. Akuisisi data dengan ETS hanya dilakukan dari satu titik
pengukuran, yaitu Station-001. Hasil peng-ukuran dengan ETS akan
dilampirkan pada lampiran penulisan ini.
2. 5 Pengolahan Data TLS
Data pemindaian TLS yang telah didapatkan diolah untuk
menghasilkan data-data yang diperlukan dalam kalibrasi ini, yaitu
data ukuran jarak dan koordinat dari setiap target yang digunakan.
Pengolahan data TLS terdiri dari beberapa tahap, yaitu pengecekan
kualitas hasil pemindaian target, impor data hasil pemindaian,
registrasi hasil pemindaian, pembuatan model space, dan
georeferencing. Piranti lunak yang digunakan untuk mengolah data
pemindaian TLS yaitu Leica Cyclone 7.1.1.
Pengecekan kualitas hasil pengukuran target
Tahap pengolahan ini akan mereduksi sejumlah target yang
memiliki kualitas pemindaian yang kurang baik karena hasil
pemindaian yang kurang baik, target berpindah posisi, dan tidak
terlihat. Dari 43 target yang dipindai, hanya 32 target yang akan
digunakan dalam proses pengolahan data TLS ini.
Impor data hasil pemindaian
Agar data hasil pemindaian TLS dapat diolah, hasil pemindaian
dari semua stasiun yang digunakan harus dimasukkan ke dalam basis
data piranti lunak Leica Cyclone 7.1.1 dengan cara melakukan impor
data.
Registrasi hasil pemindaian
Setelah data hasil pemindaian diimpor ke dalam basis data
piranti lunak Cyclone 7.1.1, dilakukan tahap selanjutnya yaitu
meregistrasi hasil pemindaian. Dikarenakan dalam pengukuran ini
menggunakan target-target sebagai titik ikatnya, registrasi hasil
pemindaian ini menggunakan metode target-based registration. Selain
itu penggunaan metode ini juga dikarenakan untuk mendapatkan hasil
yang cukup akurat. Hasil registrasi data yang dilakukan memberikan
nilai galat paling besar 0,007 m dengan rata-rata galat sebesar
0,002 m.
Pembuatan model space
Setelah proses registrasi telah dilakukan, dapat dibuat model
3-Dimensi dari hasil pemindaian yang telah dilakukan, yaitu dengan
cara membuat model space dengan menggunakan data hasil registrasi.
Model space ini digunakan untuk memudahkan dalam proses
memvisualisasikan ruangan kalibrasi beserta peletakan target-target
yang digunakan. Hasil pemindaian yang dilakukan terkadang juga
dapat meng-hasilkan objek yang seharusnya tidak perlu ikut
dipindai, yang biasanya disebut noise. Noise yang nampak pada model
space dapat dihilangkan melalui proses filtering, walaupun proses
ini tidak akan
-
6
mempengaruhi nilai ukuran hasil pengolahan data pemindaian.
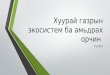
Contoh dari model space yang dihasilkan dari pembuatan model space
ini akan ditampilkan pada Gambar 2.5.
Gambar 2.5. Hasil dari pembuatan model space
Georeferencing
Dalam model space yang dibuat, titik pusat sistem koordinat
terletak pada posisi pertama pemindaian TLS. Agar hasil pemindaian
TLS memiliki sistem koordinat yang disamakan dengan sistem
koordinat lokal yang digunakan pada pengukuran ETS, maka perlu
dilakukan proses georeferencing. Titik pusat koordinat lokal yang
diinginkan memiliki ketinggian yang lebih rendah sebesar 1,664 m
dari posisi pemindaian pertama TLS. Oleh karena itu, untuk membuat
titik pusat dalam georeferencing ini hanya dengan membuat titik
baru pada model space dengan koordinat (0,000; 0,000; -1664) m dan
dijadikan titik pusat yang baru (origin) untuk sistem koordinat
lokalnya.
Walaupun telah didapatkan titik pusat pada sistem koordinat
lokal yang baru, arah dari sumbu-sumbu pengukurannya belum tepat.
Arah sistem koordinat lokal yang diinginkan
mempunyai arah nol azimuth (sumbu-n) atau arah utara mengarah ke
target pertama (T01), sumbu-u mengarah ke titik zenit, dan sumbu-e
tegak lurus dengan kedua sumbu lainnya. Untuk mewujudkan hal
tersebut, dapat dilakukan dengan memilih titik pusat sistem
koordinat baru dan titik target T01 yang kemudian dilanjutkan
mengatur arah azimuth dari titik pusat ke target T01 menjadi 0.
Pembuatan Titik Nol ETS
Setelah dilakukan proses georeferencing, didapatkan koordinat
setiap target yang diikutsertakan dalam pengolahan. Namun untuk
mendapatkan nilai ukuran jarak ruang yang sama dengan pengukuran
ETS, perlu dibuat suatu titik yang mewakili titik pengukuran ETS
dalam model space. Titik ini diberi nama titik nol ETS. Dikarenakan
titik nol ETS berada pada 1,573 m lebih tinggi dari titik pusat
sistem koordinat lokal, perlu dibuat titik baru pada model space
yang dapat mewakili titik nol ETS. Titik baru yang akan dibuat
memiliki nilai koordinat sebesar (0,000; 0,000; 1,573) m pada
sistem koordinat lokal.
2. 6 Pengolahan Data ETS
Data ukuran yang diakuisisi oleh ETS merupakan suatu data
mentah. Untuk mendapatkan koordinat target yang berasal dari hasil
ukuran ETS, data ukuran tersebut haruslah diolah melalui beberapa
tahap, yaitu menghitung besar kesalahan pengukuran ETS (salah
indeks dan salah kolimasi), menghitung sudut vertikal yang
seharusnya, menghitung sudut horizontal yang seharusnya atau
azimuth, menghitung jarak mendatar dan jarak vertikal, dan
menghitung koordinat target.
Dalam penelitian ini, hasil pengolahan data TLS dan ETS yang
akan dibandingkan adalah jarak ruang antara titik nol ETS ke target
dalam model space dengan jarak pengukuran ETS. Selain itu dilakukan
juga perbandingan koordinat 3-Dimensi target hasil pengolahan data
TLS dan ETS.
-
7
3. ANALISIS DAN PEMBAHASAN 3. 1 Analisis Kualitas Target
Dari 43 target yang dipasang, hanya 32 target yang
diikutsertakan dalam pengolahan data TLS. Hal ini dikarenakan
terdapat beberapa faktor yang menjadi dasar pertimbangan dalam
memilih target mana saja yang akan diikutsertakan dalam pengolahan
data TLS ini, yaitu:
Kualitas hasil pemindaian target TLS dari setiap posisi
pemindaian;
Kenampakan target dari posisi pemindaian;
Kestabilan target dalam pelaksanaan pemindaian.
Dari 43 target, hanya terdapat 18 target yang memiliki kualitas
hasil pemindaian yang baik dari empat posisi pemindaian, 14 target
yang memiliki kualitas hasil pemindaian yang baik dari tiga posisi
pemindaian, dan sisanya target memiliki kualitas hasil pemindaian
hanya pada dua posisi pemindaian hingga sama sekali tidak memiliki
kualitas hasil pemindaian yang baik. Terdapat beberapa hal yang
dapat mempengaruhi hasil pemindaiannya, yaitu:
Pemilihan penempatan posisi pemindaian dan target;
Sifat atau bahan dasar target yang memiliki sifat reflektif;
Adanya radiasi atau cahaya eksternal.
Selain itu, dari 43 target yang dipindai terdapat 4 buah target
yang tidak dapat dipindai karena alasan tidak terlihat dari salah
satu posisi pemindaian. Namun tiga dari empat target ini masih
dapat diikutsertakan dalam pengolahan data karena ketiga target
tersebut memiliki kualitas yang baik dari tiga posisi pemindaian
lainnya.
Terdapat juga 3 buah target yang posisinya berubah, yaitu T23,
T33, dan T36. Tiga buah target yang posisinya berubah tidak perlu
dipindai kembali pada posisi pemindaian
yang belum dilakukan. Jika target yang berubah posisinya
dipindai dan diikutsertakan dalam proses pengolahan data, maka
bentuk geometri model 3-Dimensi yang dibentuk akan memiliki
kesalahan, sehingga posisi target-target yang terdapat dalam model
pun juga akan menjadi salah.
3. 2 Analisis Registrasi Data
Registrasi data hasil pemindaian yang digunakan dalam kalibrasi
TLS menggunakan metode target-based registration. Hal ini dilakukan
agar target memiliki ketelitian yang baik dalam pembuatan model.
Hasil registrasi data yang dilakukan memberikan nilai kesalahan
paling besar 0,007 m dengan rata-rata kesalahan sebesar 0,002
m.
Semua hasil data registrasi diikutsertakan dalam pembuatan model
space. Hal ini dilakukan agar model 3-Dimensi yang dihasilkan
sesuai dengan hasil pemindaian yang dilakukan. Selain itu hal ini
juga dilakukan agar dapat dilihat besarnya perbedaan atau kesalahan
pengukuran TLS dari nilai data ukuran yang akan dibandingkan dengan
acuan yang dianggap benar, yaitu ETS.
3. 3 Analisis Model Space
Dalam pembuatan model space, model space yang dihasilkan masih
memiliki point clouds yang tidak termasuk berada di dalam ruangan
yang digunakan. Point clouds ini dianggap sebagai noise dalam
pemindaian. Namun dalam kalibrasi TLS, noise ini tidak
dipermasalahkan. Noise hanya akan mempengaruhi hasil dalam
pemodelan, sedangkan dalam kalibrasi pemodelan tidak dilakukan.
Akan tetapi dalam model space ini, beberapa noise dihilangkan
dengan melakukan filtering dengan tujuan hanya untuk merapikan
sisi-sisi luar ruangan.
-
8
Model space yang dihasilkan memiliki intensitas atau pewarnaan
yang berbeda. Hal ini dikarenakan dikarenakan oleh warna dan sifat
reflektivitas dari objek yang dipindai. Selain itu, kerapatan dari
point clouds dalam model space juga mempengaruhi intensitas/warna
menjadi lebih padat, seperti empat lingkaran yang lebih renggang
yang terdapat pada lantai, menandakan daerah yang tidak dapat
dipindai dari masing-masing posisi pemindaian alat, karena
keterbatasan dari field-of-view (FOV) TLS yang digunakan.
3. 4 Analisis Perbandingan Data TLS dengan ETS
Setelah pengolahan data pemindaian TLS dilakukan, didapatkan
data hasil pengolahan TLS yang berupa jarak ruang antara posisi
titik nol ETS dengan target dan hasil nilai koordinat target
yang digunakan. Hasil pengolahan tersebut kemudian akan
dibandingkan dengan data pengukuran koordinat target hasil
pengolahan dengan ETS. Dengan menganggap data ukuran ETS merupakan
data yang benar, nilai perbandingan yang dihasilkan dapat digunakan
sebagai koreksi yang untuk pengukuran TLS. Rentang dan nilai
rata-rata selisih ukuran data TLS dengan ETS akan ditampilkan pada
Tabel 3.1. Hasil perbandingan antara data ukuran jarak ruang dan
nilai koordinat target TLS dengan ETS akan ditampilkan pada
lampiran penulisan ini.
Tabel 3.1. Rentang dan nilai rata-rata selisih ukuran data TLS
dengan ETS
Selisih Data Nilai Min (m) Nilai Max (m) Rata-Rata (m)
Koordinat Target
Sumbu-e (de) -0,014 0,008 -0,004
Sumbu-n (dn) -0,022 0,006 -0,002
Sumbu-u (du) -0,035 -0,029 -0,032
Jarak Ruang (dSD) -0,004 0,023 0,004
Ukuran Jarak Ruang TLS ke Target
1,901 11,280 5,818
3. 5 Analisis Selisih Data Perbandingan
Dari hasil perbandingan data TLS dan ETS yang didapatkan, dapat
dilihat bahwa semakin besar jarak ruang yang dihasilkan, besar
selisih perbedaan jarak antar TLS dengan ETS cenderung mengecil,
seperti yang terdapat pada Gambar 3.1.
Gambar 3.1. Kurva perbandingan selisih jarak ruang dengan
pertambahan jarak
ruang
-
9
Hal ini terjadi dimungkinkan karena adanya sudut insidensi yang
dibentuk laser dengan target yang mana sudut tersebut akan semakin
besar bila jaraknya semakin dekat. Sudut ini menyebabkan
kemungkinan terjadinya kesalahan pengukuran akibat pemantulan tak
langsung atau penghamburan laser semakin besar. Namun data
perbandingan TLS dan ETS yang didapatkan melihatkan bahwa semakin
besar jarak ruang, besar selisih perbedaan koordinat antara TLS
dengan ETS dalam ketiga sumbu cenderung semakin besar. Hal ini
dibuktikan pada Gambar 3.2.
Gambar 3.2. Kurva perbandingan selisih koordinat dengan
pertambahan jarak ruang
Perbandingan ini menandakan semakin jauh jarak pengukuran target
atau objek, semakin besar kesalahan yang dihasilkan oleh TLS. Bila
dibandingkan dengan pengukuran jarak, semakin panjang jarak ruang
pengukuran, semakin kecil perbedaan jarak yang dihasilkan. Hal ini
menandakan adanya kesalahan lain dalam proses pelaksanaan kalibrasi
ini. Kesalahan ini kemungkinan dikarenakan adanya perambatan
kesalahan dalam pelaksanaan kalibrasi TLS ini, dimulai dari
penyiapan alat saat melakukan penempatan dan pendataran alat,
pengukuran tinggi TLS dan ETS yang berbeda, dan proses pembuatan
titik nol ETS yang melalui beberapa tahapan pengolahan data.
Kesalahan-kesalahan ini dapat diminimalkan atau dihindari dengan
dilakukannya survei pendahuluan sebelum dilaksanakannya
kalibrasi.
3. 6 Analisis Validasi Ukuran Objek
Hasil pemindaian dengan menggunakan TLS membentuk suatu model 3D
yang memiliki faktor skala, yang mana faktor skala dapat memberikan
informasi yang berupa informasi ukuran spasial dalam ruang
3-dimensi menjadi lebih akurat. Untuk mengecek kualitas ukuran
objek dalam model space, perlu dilakukan validasi terhadap beberapa
objek seperti pada Gambar 3.2 dengan menggunakan pita ukur.
Gambar 3.2. Beberapa bagian objek model space untuk validasi
pengukuran jarak
-
10
Dari hasil pengukuran validasi jarak, didapatkan rentang selisih
jarak pengukuran menggunakan pita ukur dengan ukuran jarak pada
model space sebesar -1,5 cm hingga 1,5 cm dengan selisih rata
sebesar 1 mm. . Dari hasil ini dapat dikatakan model space yang
dibentuk dari hasil pemindaian ini cukup akurat. Hanya saja
perbedaan pengukuran jarak yang dihasilkan dapat diakibatkan karena
pita ukur yang kurang teregang kuat atau pemilihan point clouds
yang kurang tepat.
3. 7 Analisis Aspek Luar Alat
Selain dari dalam instrumen, terdapat hal yang dapat dianalisis
dari luar alat.
Analisis Target yang Digunakan
Target yang digunakan sebagai objek adalah target-target TLS
yang berbentuk bidang datar. Hal ini mengakibatkan pemindaian ke
beberapa target tidak menghasilkan hasil pemindaian yang baik yang
dikarenakan adanya sudut pandang TLS ke target (sudut insidensi)
yang dapat membuat pemindaian dan pemilihan titik tengah target
menjadi salah atau tidak tercapai. Oleh karena itu, sebaiknya dalam
pelaksanaan kalibrasi dengan TLS digunakan target-target TLS yang
berbentuk bola atau spherical target agar sudut pandang TLS ke
target menjadi sama dari beberapa posisi pemindaian.
Analisis Penempatan Posisi Alat dan Target
Pada saat melakukan kalibrasi, didapatkan beberapa target yang
tidak dapat dipindai karena tidak dapat terlihat oleh TLS atau pun
terhalang oleh bentuk fondasi ruangan. Akan tetapi dalam penempatan
posisi pemindaian telah dilakukan pertimbangan berdasarkan jumlah
target yang dapat dipindai dari posisi tersebut.
Analisis Hasil Pemindaian
Hasil pemindaian target yang dilakukan tidak semuanya memiliki
hasil pemindaian yang bagus. Selain sudut pandang pemindaian yang
menyebabkan hasil pengukuran
kurang baik, kesalahan akibat gangguan radiasi luar seperti
cahaya matahari yang masuk melalui ventilasi dapat mempengaruhi
hasil pemindaian. Oleh karena itu kalibrasi TLS sebaiknya dilakukan
di dalam ruangan yang tertutup atau dilakukan di malam hari.
Biaya Pelaksanaan
Biaya yang dikeluarkan dalam melaksanakan kalibrasi ini cukup
murah. Hal ini dikarenakan tidak perlunya mengeluarkan sejumlah
biaya yang banyak dalam meminjam ruangan dan ETS yang digunakan
serta target TLS yang tidak perlu dibeli. Hanya dalam pelaksanaan
kalibrasi TLS, target yang sebaiknya digunakan merupakan target
bola, yang mana saat ini belum dimiliki oleh geodesi ITB. Dalam hal
ini, manajemen kegiatan kalibrasi TLS yang digunakan haruslah cukup
baik agar dapat meminimalkan biaya operasional yang harus
dikeluarkan.
Penerapan Hasil Kalibrasi
Selisih yang didapatkan antara TLS dan ETS dapat digunakan
sebagai koreksi data ukuran TLS. Hanya saja dalam penerapannya
sampai saat ini belum ditemukan piranti lunak yang dapat memasukkan
data hasil kalibrasi yang berupa koreksi ke dalam data ukuran TLS
secara otomatis. Oleh karena itu untuk dapat memasukkan atau
menerapkan koreksi ke dalam data TLS harus dilakukan secara manual
menggunakan piranti lunak di luar piranti lunak TLS, seperti
Microsoft Office Excel. Hal ini mengakibatkan waktu yang dibutuhkan
dalam proses pelaksanaan kalibrasi ini bertambah dan akan dapat
berdampak pada biaya operasional yang dapat dikeluarkan.
3. 8 Analisis Hasil Penelitian
Setelah melakukan serangkaian pelaksanaan kalibrasi TLS dengan
menggunakan data ETS sebagai data
-
11
pembanding, dapat diambil beberapa hasil yang didapatkan,
yaitu:
Hasil pengukuran dengan menggunakan TLS dapat dipengaruhi oleh
faktor dalam alat dan faktor luar alat. Kesalahan dari dalam alat
terletak pada laser rangefinder. Sedangkan faktor luar alat yang
dapat memberikan pengaruh buruk terhadap data ukuran seperti jenis
target yang digunakan, kondisi ruangan yang digunakan, gangguan
radiasi luar saat pelaksanaan kalibrasi, dan adanya perambatan
kesalahan yang terjadi selama proses kalibrasi berlangsung;
Target yang digunakan dalam kalibrasi TLS sebaiknya berbentuk
bola atau spherical target agar pemindaian target dengan TLS
memiliki sudut pandang yang sama dari posisi pemindaian yang
berbeda-beda;
Pelaksanaan kalibrasi sebaiknya dilakukan di dalam ruangan yang
tertutup atau dilakukan pada malam hari;
Sebelum melakukan kalibrasi TLS, sebaiknya dilakukan survei
pendahuluan yang meliputi perencanaan penempatan alat, penempatan
posisi target, dan jenis target yang akan digunakan
4. KESIMPULAN
Setelah melaksanakan penelitian kalibrasi Terrestrial Laser
Scanner, dapat diambil kesimpulan bahwa:
1. Kalibrasi TLS dapat dilakukan dengan membandingkan data
ukuran TLS dengan ETS. Besar nilai kesalahan TLS yang didapatkan
dari hasil penelitian ini adalah sebesar:
0,004 m dalam ukuran jarak ruang;
-0,005 m dalam sumbu-e (easting);
-0,002 m dalam sumbu-n (northing);
-0,032 m dalam sumbu-u (up).
2. Metode kalibrasi yang dilakukan pada TLS cukup efektif. Hal
ini dikarenakan pelaksanaan kalibrasi dengan membandingkan data
ukuran cukup sederhana, cepat, dan tidak memakan biaya yang cukup
mahal. Hanya saja terdapat beberapa hal yang harus diperhatikan
dalam pelaksanaan kalibrasi TLS, yaitu:
Perlu dilakukan survei pendahuluan sebelum melaksanakan
kalibrasi;
Penempatan posisi alat dan target harus dilakukan secara
hati-hati;
Jumlah target yang digunakan sebaiknya sebanyak-banyaknya untuk
memberikan nilai ukuran lebih dalam proses kalibrasi;
Ruangan yang digunakan sebaiknya tertutup atau terhindar dari
adanya cahaya atau radiasi luar.
3. Data hasil kalibrasi yang didapatkan masih belum dapat
diterapkan secara langsung untuk koreksi data hasil pengukuran,
sehingga kalibrasi yang dilakukan saat ini hanya baru sebatas
mencari kesalahan instrumen TLS yang digunakan. Akan tetapi,
koreksi ini dapat dijadikan acuan untuk perbaikan metode akuisisi
data
REFERENSI
Bae, K-H. dan Lichti, D. D. (2007). On-Site Self-Calibration
Using Planar Feature for Terrestrial Laser Scanner. Perth,
Australia: Curtin University of Technology.
Boehler, W. dan Marbs, A. (2003). Investigating Laser Scanner
Accuracy.
-
12
Mainz, Germany: University of Applied Sciences.
Cruikshank, K. (2010). Use of the Electronic Total Station.
Portland, United States:
Portland State University.
Gielsdorf, F., Rietdorf, A, dan Gruendig, L. (2004). A Concept
for The Calibration of Terrestrial Laser Scanner. Athens,
Greece: FIG Working Week.
Gumus, K. dan Erkaya, H. (2013). The Comparison Of Accuracy Of
Length Measurement Obtained From Terrestrial Laser Scanner And
Total Station. Istanbul, Turkey: Yildiz Technical University.
Heritage, G. L. dan Large, A. R. G. (2009). Laser Scanning
Evolution of the Discipline. Hal: 1-20. Dalam Heritage, G. L. dan
Large, A. R. G. Laser Scanning for The Environmental Sciences. West
Sussex, United Kingdom: Wiley-Blackwell.
Heritage, G. L. dan Large, A. R. G. (2009). Principle of 3D
Laser Scanning. Hal: 21-34. Dalam Heritage, G. L. dan Large, A. R.
G. Laser Scanning for The Environmental Sciences. West Sussex,
United Kingdom: Wiley-Blackwell.
Kersten, T. P., Mechelke, K., Lindstaedt, M, dan Sternberg, H.
(2009). Methods for Geometric Accuracy Investigations of
Terrestrial Laser Scanning Systems. Germany: Photogrammetrie
Fernerkundung Geoinformation.
Petrie, G., dan Toth, C. K. (2009). Terrestrial Laser Scanner.
Hal: 87-126. Dalam Shan, J., dan Toth, C. K. Topographic Laser
Ranging and Scanning: Principles and Processing. United Kingdom:
CRC
Press/Taylor & Francis Group.
Quintero, M. S., Genechten, B. V., Bruyne, M. D., Ronald, P.,
Hankar, M, dan Barnes, S. (2008). Theory And Practice On
Terrestrial Laser Scanning. The Learning Tools for Advanced
Three-dimensional Surveying In Risk Awareness Project
(3DRiskMapping).
Reshetyuk, Y. (2009). Terrestrial Laser Scanning, Error Source,
Self-calibration, And Direct Georeferencing. Saarbrucken,
Germany: VDM Verlag Dr. Muller.
Schulz, Thorsten. (2007). Dissertation: Calibration of a
Terrestrial Laser Scanner for Engineering Geodey. Zurich,
Switzerland: ETH Zurich University.
Walker, J. (2008). Fundamentals of Physics Eighth Edition.
United States: WileyPLUS.
-
LEMBAR PENGESAHAN PAPER
Diperiksa dan disetujui oleh:
Pembimbing I, Pembimbing II, Pembimbing III,
Prof. Dr. Ir. Hasanuddin Z. Abidin, M.Sc. Irwan Gumilar, ST.,
M.Si. Nia Haerani, ST., MT.
NIP.196008081986011001 NIP.197803292010121004
NIP.197108302003122001