Embed Size (px)
Citation preview
PENDETEKSI OBYEK DI DALAM RUANGAN MENGGUNAKAN SENSOR INFRA MERAH
Rizqi Ramadhan
Jurusan Sistem Komputer Fakultas Ilmu Komputer dan Teknologi Informasi
Universitas Gunadarma Margonda Raya 100 Depok 16424 telp (021) 78881112, 7863788
ABSTRAKSI
Keterbatasan tenaga manusia dalam memonitor suatu ruangan secara terus menerus dapat mengakibatkan adanya tindak kriminal terjadi. Hal ini disebabkan kondisi fisik manusia yang lelah dalam memonitor suatu ruangan secara terus menerus. Pendeteksi obyek menggunakan sensor infra merah merupakan suatu alat yang dirancang untuk melakukan pemantauan terhadap obyek pada suatu ruangan yang dapat bekerja dalam keadaan tanpa cahaya. Alat yang digunakan melibatkan mikrokontroller DFRDuino Uno sebagai pengontrol sensor Sharp GP2Y0A21 dan motor servo standar. Sensor Sharp GP2Y0A21 sebagai sensor jarak infra merah berfungsi untuk mendeteksi jarak suatu obyek di dalam ruangan. Sensor infra merah digerakkan oleh motor servo standar untuk melakukan scanning pada ruangan sehingga dapat mengetahui keberadaan posisi sudut suatu obyek. Dengan menggunakan Processing 1.5.1, informasi di tampilkan pada notebook berupa radar yang menampilkan posisi sudut dari obyek dan jarak obyek terhadap sensor infra merah di dalam ruangan melalui mikrokontroler DFRduino Uno menggunakan kabel USB. Pengujian dilakukan dengan berbagai kondisi, seperti membandingkan jarak sebenarnya dengan jarak pada radar. Kemudian memonitor pergerakan dari obyek yang bergerak dengan arah pergerakan yang berbeda-beda serta menguji pengaruh cahaya terhadap sensor infra merah. Dari hasil penelitian yang telah dilakukan, sensor infra merah cukup responsif dalam mendeteksi pergerakan suatu obyek di dalam ruangan dan cahaya tidak mempengaruhi kinerja dari sensor infra merah. Kata Kunci : Pendeteksi, Infra merah, DFRDuino Uno, Sensor Sharp GP2Y0A21, Processing 1.5.1. Tanggal pembuatan : 16 Oktober 2012 1. PENDAHULUAN
1.1 Latar Belakang
Perkembangan Teknologi Informasi yang maju dengan pesat sangat mempengaruhi cara berpikir manusia. Manusia menginginkan suasana yang nyaman dan aman dalam melakukan berbagai kegiatannya. Pada kenyataannya
masa sekarang ini dimana perkembangan teknologi semakin canggih, keamanan dengan menggunakan kamera pada suatu tempat memiliki kelemahan pada saat cahaya tidak menerangi ruangan tersebut sehingga pengamanan dapat ditembus. Selain itu keterbatasan tenaga manusia untuk memonitor suatu ruangan mengakibatkan adanya tindak kriminal
yang terjadi, misalnya saja pencurian barang yang ada di dalam ruangan tersebut. Salah satu keinginan manusia adalah ingin merasakan keamanan diri dari lingkungan sekitar mereka, sehingga orang berpikir untuk membuat suatu alat yang bisa melihat kondisi keamanan lingkungan disekitarnya tanpa harus dipantau dalam jarak pandang mata.
Dengan semakin pesatnya perkembangan teknologi pada saat ini dan diikuti oleh kemajuan cara berpikir praktis dan sederhana, maka pemanfatan teknologi untuk mendeteksi suatu obyek menjadi optimal. Alat pendeteksi obyek ini memanfaatkan sensor infra merah yang dirancang bergerak 1800 dengan bantuan motor servo menggunakan mikrokontroller. Apabila sensor Sharp merespon suatu obyek di dalam ruangan, maka obyek tersebut akan ditampilkan di notebook menggunakan antarmuka program Processing melalui mikrokontroler DFRduino Uno menggunakan kabel USB. 1.2 Batasan Masalah
Dalam pembuatan alat pendeteksi obyek di dalam ruangan menggunakan sensor infra merah, permasalahan yang dibahas adalah cara pengoperasian alat pendeteksi objek menggunakan sensor Sharp GP2Y0A21, motor servo standar, dan DFRduino uno pada prototipe ruangan, mulai dari objek yang terdeteksi oleh sensor Sharp GP2YA21 dengan berbagai kondisi hingga ditampilkannya informasi tersebut ke notebook menggunakan antarmuka program Processing melalui kabel USB. 2. TINJAUAN PUSTAKA
Untuk membuat suatu pendeteksi obyek di dalam ruangan menggunakan sensor infra merah diperlukan landasan
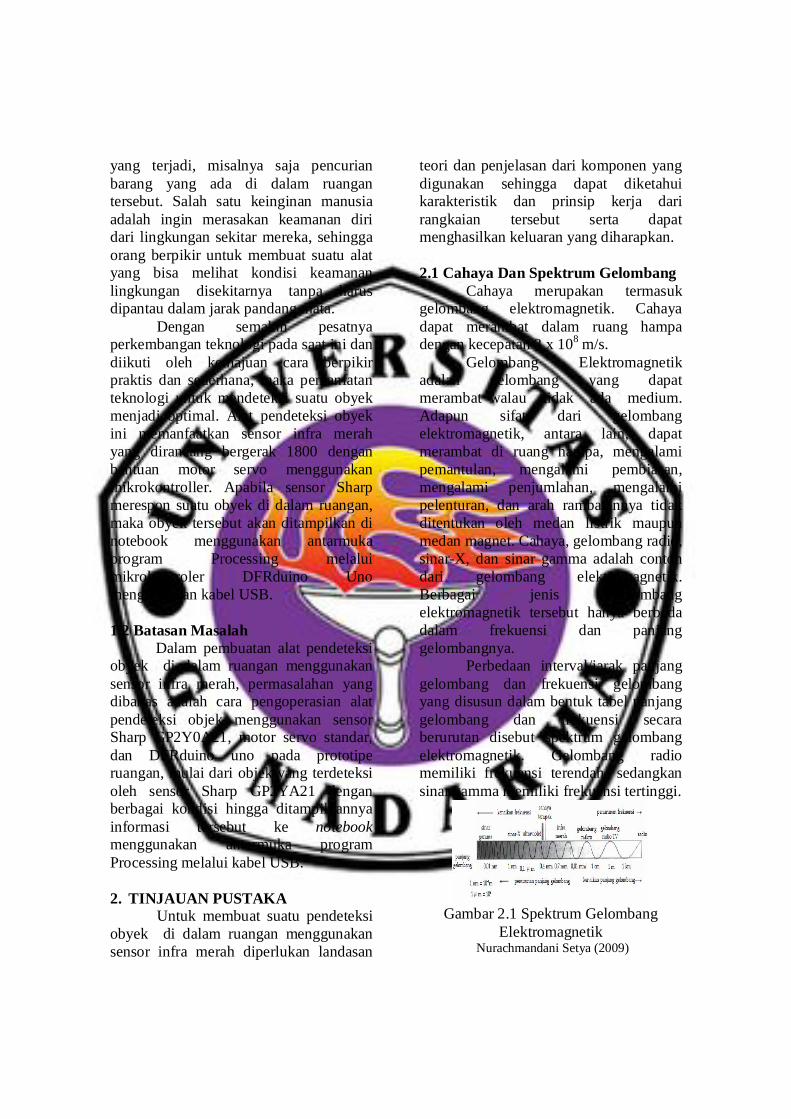
teori dan penjelasan dari komponen yang digunakan sehingga dapat diketahui karakteristik dan prinsip kerja dari rangkaian tersebut serta dapat menghasilkan keluaran yang diharapkan. 2.1 Cahaya Dan Spektrum Gelombang Cahaya merupakan termasuk gelombang elektromagnetik. Cahaya dapat merambat dalam ruang hampa dengan kecepatan 3 x 108 m/s. Gelombang Elektromagnetik adalah gelombang yang dapat merambat walau tidak ada medium. Adapun sifat dari gelombang elektromagnetik, antara lain, dapat merambat di ruang hampa, mengalami pemantulan, mengalami pembiasan, mengalami penjumlahan, mengalami pelenturan, dan arah rambatannya tidak ditentukan oleh medan listrik maupun medan magnet. Cahaya, gelombang radio, sinar-X, dan sinar gamma adalah contoh dari gelombang elektromagnetik. Berbagai jenis gelombang elektromagnetik tersebut hanya berbeda dalam frekuensi dan panjang gelombangnya. Perbedaan interval/jarak panjang gelombang dan frekuensi gelombang yang disusun dalam bentuk tabel panjang gelombang dan frekuensi secara berurutan disebut spektrum gelombang elektromagnetik. Gelombang radio memiliki frekuensi terendah, sedangkan sinar gamma memiliki frekuensi tertinggi.
Gambar 2.1 Spektrum Gelombang
Elektromagnetik Nurachmandani Setya (2009)
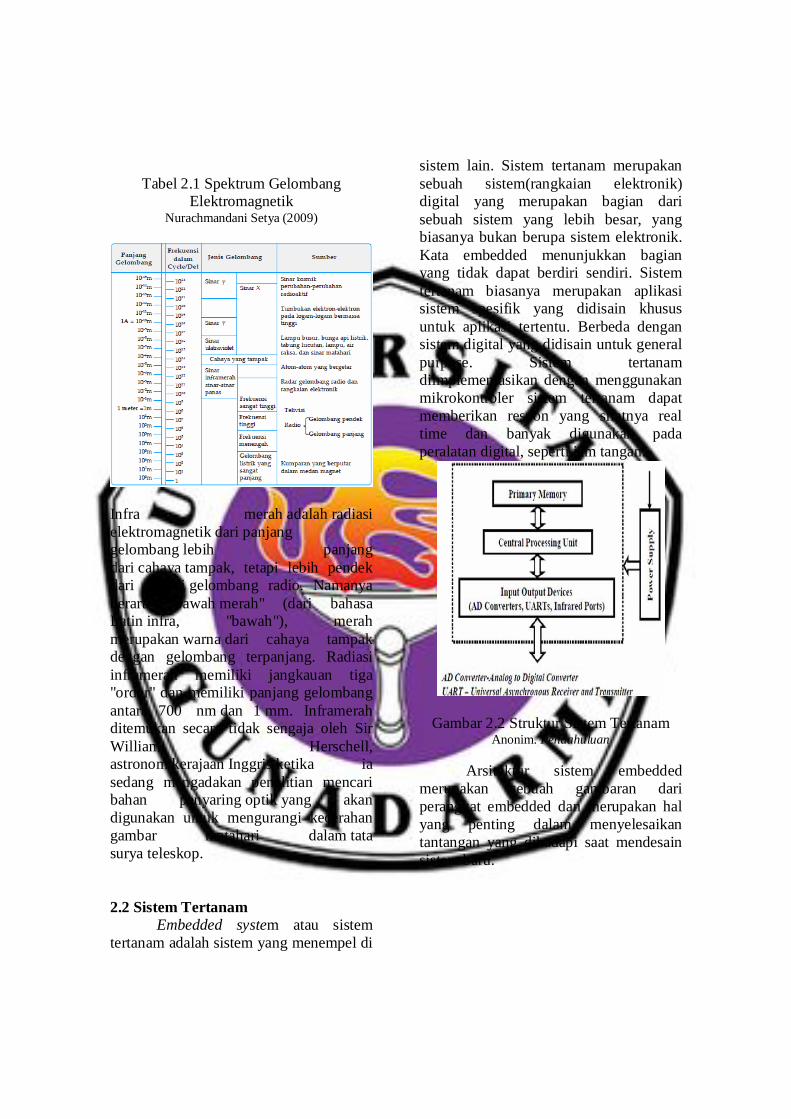
Tabel 2.1 Spektrum Gelombang
Elektromagnetik Nurachmandani Setya (2009)
Infra merah adalah radiasi elektromagnetik dari panjang gelombang lebih panjang dari cahaya tampak, tetapi lebih pendek dari radiasi gelombang radio. Namanya berarti "bawah merah" (dari bahasa Latin infra, "bawah"), merah merupakan warna dari cahaya tampak dengan gelombang terpanjang. Radiasi inframerah memiliki jangkauan tiga "order" dan memiliki panjang gelombang antara 700 nm dan 1 mm. Inframerah ditemukan secara tidak sengaja oleh Sir William Herschell, astronom kerajaan Inggris ketika ia sedang mengadakan penelitian mencari bahan penyaring optik yang akan digunakan untuk mengurangi kecerahan gambar matahari dalam tata surya teleskop. 2.2 Sistem Tertanam
Embedded system atau sistem tertanam adalah sistem yang menempel di
sistem lain. Sistem tertanam merupakan sebuah sistem(rangkaian elektronik) digital yang merupakan bagian dari sebuah sistem yang lebih besar, yang biasanya bukan berupa sistem elektronik. Kata embedded menunjukkan bagian yang tidak dapat berdiri sendiri. Sistem tertanam biasanya merupakan aplikasi sistem spesifik yang didisain khusus untuk aplikasi tertentu. Berbeda dengan sistem digital yang didisain untuk general purpose. Sistem tertanam diimplementasikan dengan menggunakan mikrokontroler sistem tertanam dapat memberikan respon yang sifatnya real time dan banyak digunakan pada peralatan digital, seperti jam tangan.
Gambar 2.2 Struktur Sistem Tertanam Anonim. Pendahuluan
Arsitektur sistem embedded merupakan sebuah gambaran dari perangkat embedded dan merupakan hal yang penting dalam menyelesaikan tantangan yang dihadapi saat mendesain sistem baru.
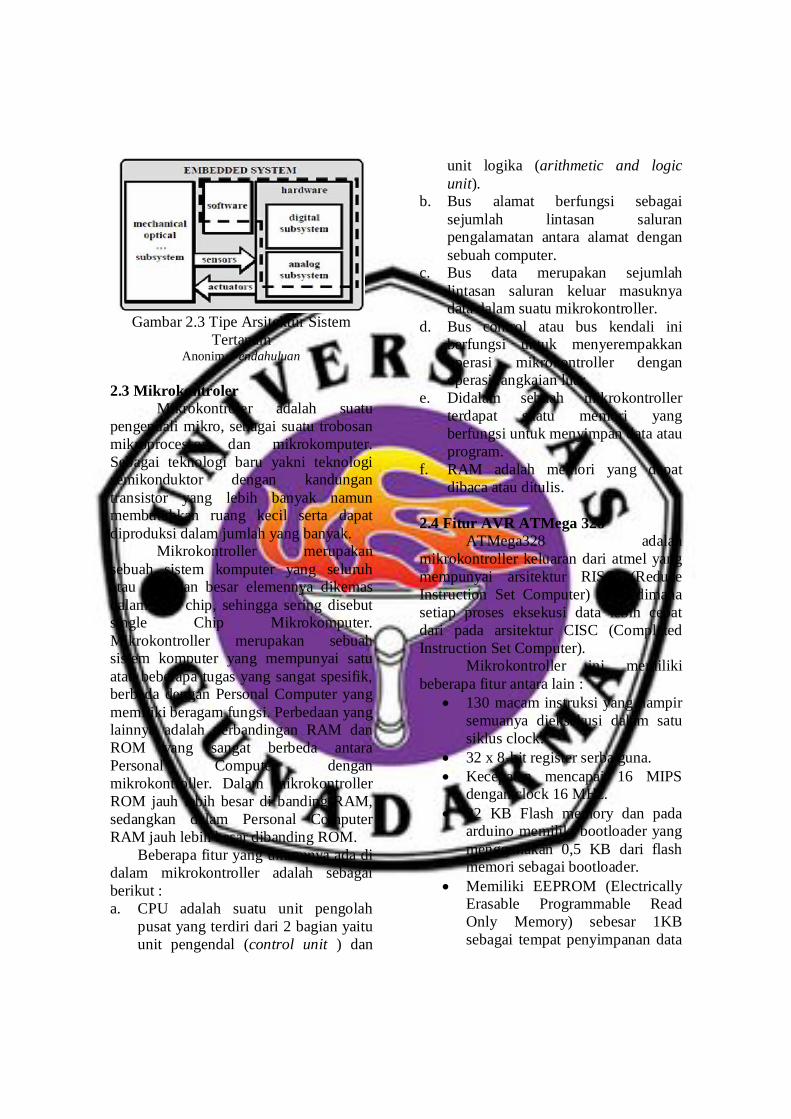
Gambar 2.3 Tipe Arsitektur Sistem
Tertanam Anonim. Pendahuluan
2.3 Mikrokontroler
Mikrokontroler adalah suatu pengendali mikro, sebagai suatu trobosan mikroprocessor dan mikrokomputer. Sebagai teknologi baru yakni teknologi semikonduktor dengan kandungan transistor yang lebih banyak namun membutuhkan ruang kecil serta dapat diproduksi dalam jumlah yang banyak. Mikrokontroller merupakan sebuah sistem komputer yang seluruh atau sebagian besar elemennya dikemas dalam satu chip, sehingga sering disebut single Chip Mikrokomputer. Mikrokontroller merupakan sebuah sistem komputer yang mempunyai satu atau beberapa tugas yang sangat spesifik, berbeda dengan Personal Computer yang memiliki beragam fungsi. Perbedaan yang lainnya adalah perbandingan RAM dan ROM yang sangat berbeda antara Personal Computer dengan mikrokontroller. Dalam mikrokontroller ROM jauh lebih besar di banding RAM, sedangkan dalam Personal Computer RAM jauh lebih besar dibanding ROM.
Beberapa fitur yang umumnya ada di dalam mikrokontroller adalah sebagai berikut : a. CPU adalah suatu unit pengolah
pusat yang terdiri dari 2 bagian yaitu unit pengendal (control unit ) dan
unit logika (arithmetic and logic unit).
b. Bus alamat berfungsi sebagai sejumlah lintasan saluran pengalamatan antara alamat dengan sebuah computer.
c. Bus data merupakan sejumlah lintasan saluran keluar masuknya data dalam suatu mikrokontroller.
d. Bus control atau bus kendali ini berfungsi untuk menyerempakkan operasi mikrokontroller dengan operasi rangkaian luar.
e. Didalam sebuah mikrokontroller terdapat suatu memori yang berfungsi untuk menyimpan data atau program.
f. RAM adalah memori yang dapat dibaca atau ditulis.
2.4 Fitur AVR ATMega 328
ATMega328 adalah mikrokontroller keluaran dari atmel yang mempunyai arsitektur RISC (Reduce Instruction Set Computer) yang dimana setiap proses eksekusi data lebih cepat dari pada arsitektur CISC (Completed Instruction Set Computer). Mikrokontroller ini memiliki beberapa fitur antara lain :
130 macam instruksi yang hampir semuanya dieksekusi dalam satu siklus clock.
32 x 8-bit register serba guna. Kecepatan mencapai 16 MIPS
dengan clock 16 MHz. 32 KB Flash memory dan pada
arduino memiliki bootloader yang menggunakan 0,5 KB dari flash memori sebagai bootloader.
Memiliki EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 1KB sebagai tempat penyimpanan data
semi permanent karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
Memiliki SRAM (Static Random Access Memory) sebesar 2KB.
Memiliki pin I/O digital sebanyak 14 pin 6 diantaranya PWM (Pulse Width Modulation) output.
Master / Slave SPI Serial interface.
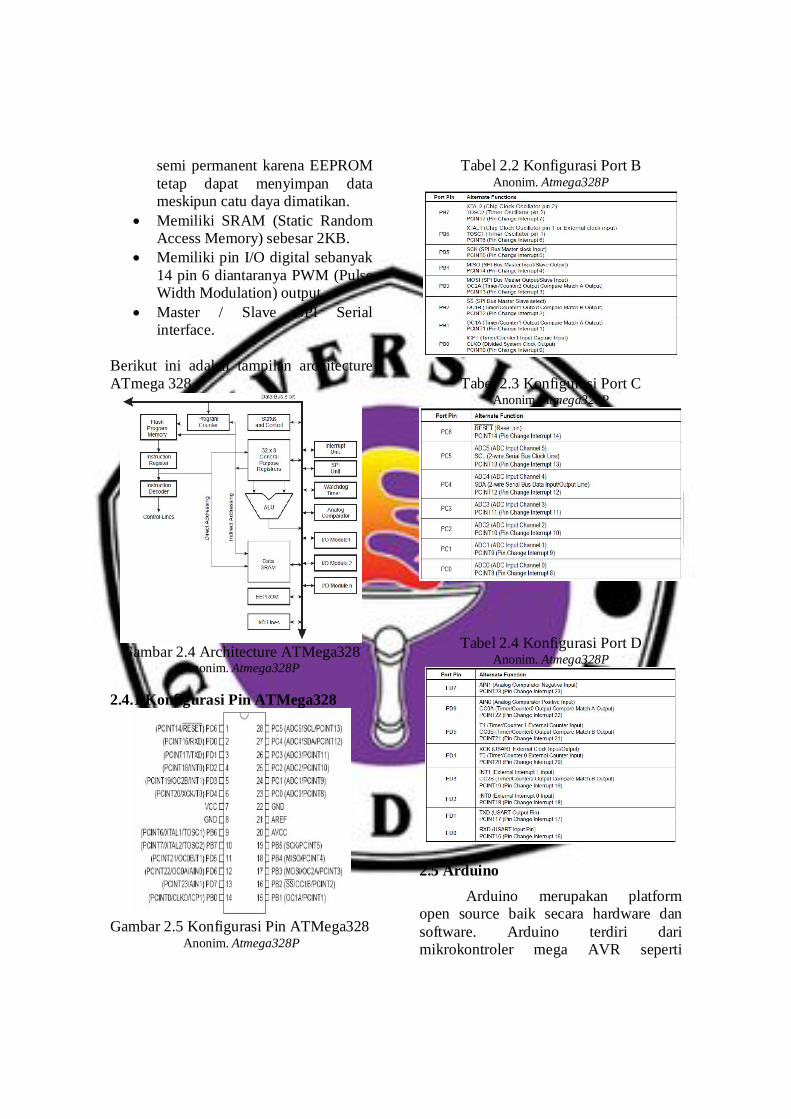
Berikut ini adalah tampilan architecture ATmega 328 :
Gambar 2.4 Architecture ATMega328
Anonim. Atmega328P
2.4.1 Konfigurasi Pin ATMega328
Gambar 2.5 Konfigurasi Pin ATMega328
Anonim. Atmega328P
Tabel 2.2 Konfigurasi Port B Anonim. Atmega328P
Tabel 2.3 Konfigurasi Port C Anonim. Atmega328P
Tabel 2.4 Konfigurasi Port D Anonim. Atmega328P
2.5 Arduino Arduino merupakan platform open source baik secara hardware dan software. Arduino terdiri dari mikrokontroler mega AVR seperti
ATmega8, ATmega168, ATmega328, ATmega1280, dan ATmega 2560 dengan menggunakan Kristal osilator 16 MHz, namun ada beberapa tipe Arduino yang menggunakan Kristal osilator 8 MHz. Catu daya yang dibutuhkan untuk mensupply minimum system Arduino cukup dengan tegangan 5 VDC. Port arduino Atmega series terdiri dari 20 pin yang meliputi 14 pin I/O digital dengan 6 pin dapat berfungsi sebagai output PWM (Pulse Width Modulation) dan 6 pin I/O analog. Kelebihan Arduino adalah tidak membutuhkan flash programmer external karena di dalam chip microcontroller Arduino telah diisi dengan bootloader yang membuat proses upload menjadi lebih sederhana. Untuk koneksi terhadap komputer dapat mennggunakan RS232 to TTL Converter atau menggunakan Chip USB ke Serial converter seperti FTDI FT232.
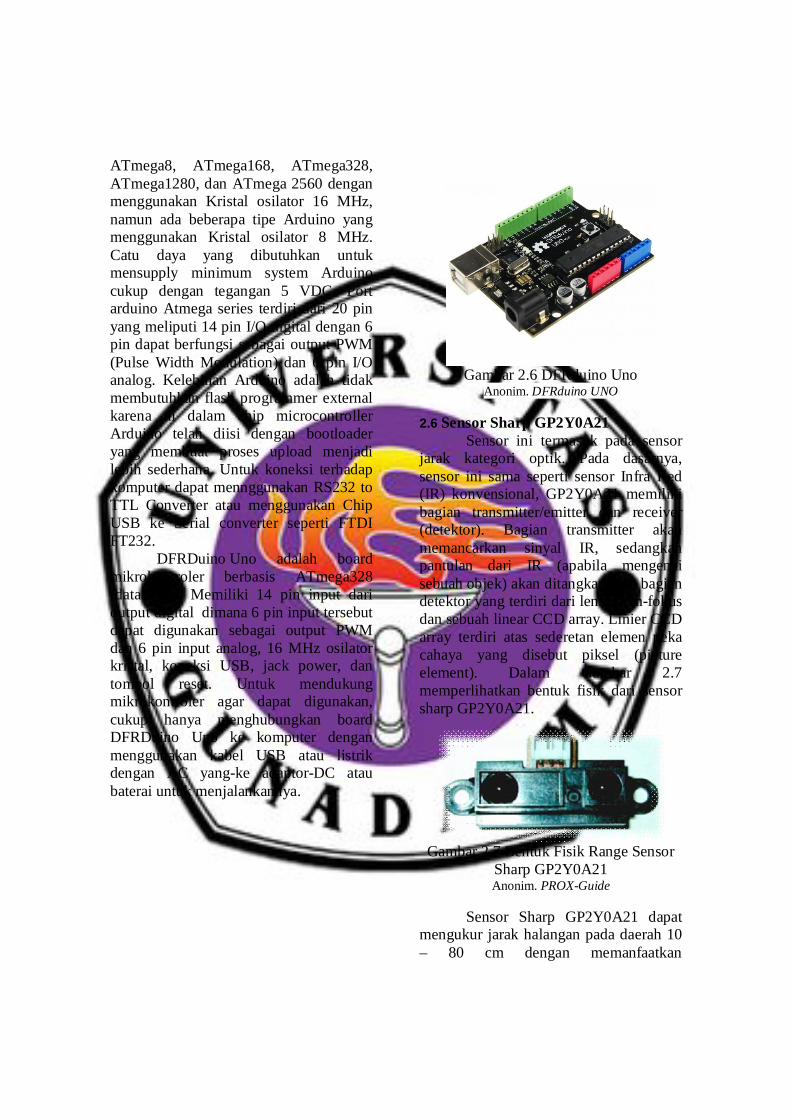
DFRDuino Uno adalah board mikrokontroler berbasis ATmega328 (datasheet). Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan board DFRDuino Uno ke komputer dengan menggunakan kabel USB atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk menjalankannya.
Gambar 2.6 DFRduino Uno
Anonim. DFRduino UNO 2.6 Sensor Sharp GP2Y0A21
Sensor ini termasuk pada sensor jarak kategori optik. Pada dasarnya, sensor ini sama seperti sensor Infra Red (IR) konvensional, GP2Y0A21 memiliki bagian transmitter/emitter dan receiver (detektor). Bagian transmitter akan memancarkan sinyal IR, sedangkan pantulan dari IR (apabila mengenai sebuah objek) akan ditangkap oleh bagian detektor yang terdiri dari lensa pem-fokus dan sebuah linear CCD array. Linier CCD array terdiri atas sederetan elemen peka cahaya yang disebut piksel (picture element). Dalam Gambar 2.7 memperlihatkan bentuk fisik dari sensor sharp GP2Y0A21. Gambar 2.7 Bentuk Fisik Range Sensor
Sharp GP2Y0A21 Anonim. PROX-Guide
Sensor Sharp GP2Y0A21 dapat
mengukur jarak halangan pada daerah 10 – 80 cm dengan memanfaatkan
pemancaran dan penerimaan sinar infra merah sebagai media untuk mengestimasi jarak. Penggunaan spektrum infra merah menyebabkan sensor ini tidak mudah terganggu dengan keberadaan cahaya tampak dari lingkungan karena memiliki daerah spektrum yang berbeda. 2.7 Motor Servo
Motor servo adalah sebuah motor dengan sistem closed feedback di mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor, serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. Tampak pada gambar dengan pulsa 1.5 mS pada periode selebar 2 mS maka sudut dari sumbu motor akan berada pada posisi tengah. Semakin lebar pulsa OFF maka akan semakin besar gerakan sumbu ke arah jarum jam dan semakin kecil pulsa OFF maka akan semakin besar gerakan sumbu ke arah yang berlawanan dengan jarum jam.
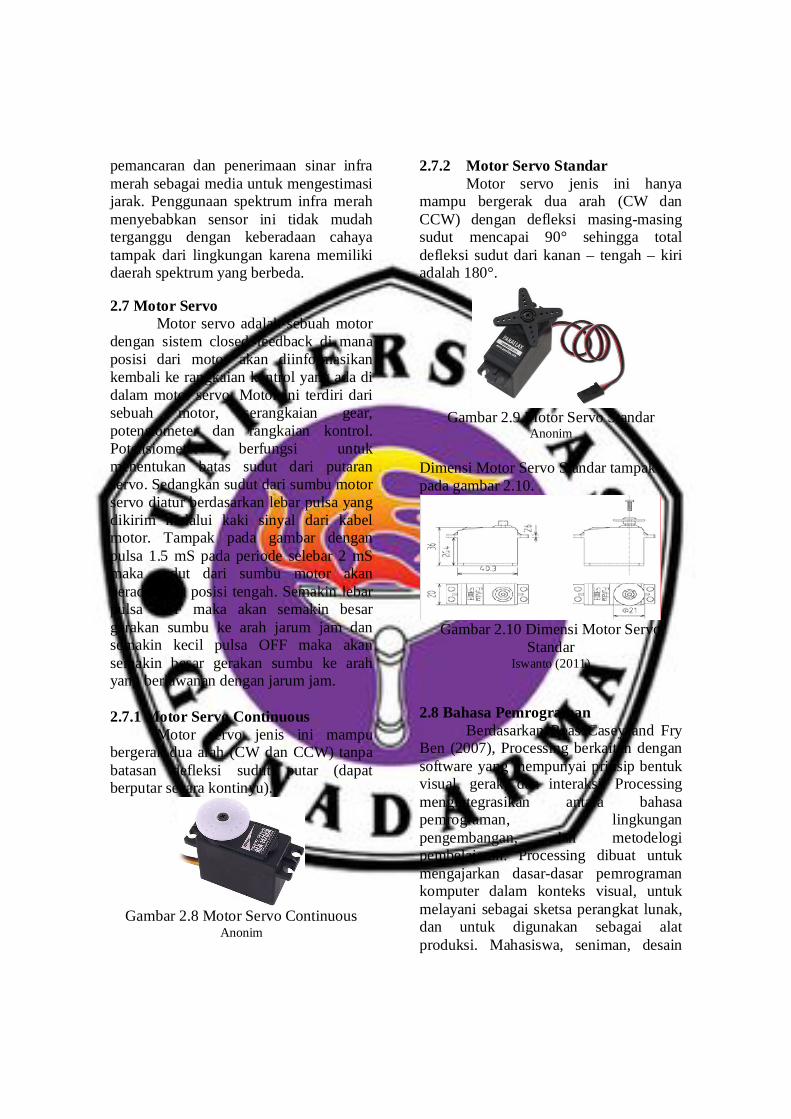
2.7.1 Motor Servo Continuous
Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu).
Gambar 2.8 Motor Servo Continuous
Anonim
2.7.2 Motor Servo Standar Motor servo jenis ini hanya
mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari kanan – tengah – kiri adalah 180°.
Gambar 2.9 Motor Servo Standar
Anonim Dimensi Motor Servo Standar tampak pada gambar 2.10.
Gambar 2.10 Dimensi Motor Servo
Standar Iswanto (2011)
2.8 Bahasa Pemrograman Berdasarkan Reas Casey and Fry Ben (2007), Processing berkaitan dengan software yang mempunyai prinsip bentuk visual, gerak, dan interaksi. Processing mengintegrasikan antara bahasa pemrograman, lingkungan pengembangan, dan metodelogi pembelajaran. Processing dibuat untuk mengajarkan dasar-dasar pemrograman komputer dalam konteks visual, untuk melayani sebagai sketsa perangkat lunak, dan untuk digunakan sebagai alat produksi. Mahasiswa, seniman, desain
profesional, dan peneliti menggunakannya untuk belajar, prototyping, dan produksi. Bahasa pemrograman processing adalah bahasa pemrograman berupa teks yang dirancang untuk menghasilkan dan memodifikasi gambar. Processing berusaha untuk mencapai keseimbangan antara penjelasan makna dan fitur canggih. Pemula dapat menulis program mereka sendiri setelah beberapa menit setelah instruksi, tetapi pengguna lanjut dapat menggunakan dan menulis perpustakaan dengan menambahkan fungsi. Sistem ini memfasilitasi mengajar dengan grafis komputer dan teknik interaksi termasuk vektor atau gambar, pengolahan gambar, model warna, perintah dari mouse dan keyboard, komunikasi jaringan, dan pemrograman berorientasi obyek. Kemampuang pengolahan perpustakaan mudah diperluas untuk menghasilkan suara, mengirim atau menerima data dalam beragam format, dan untuk mengirim atau menerima format file 2D dan 3D.
Tabel berikut membandingkan kapasitas dari tipe data yang disebutkan di atas dengan tipe data yang umum:
Tabel 2.5 Jenis Tipe Data Reas Casey and Fry Ben (2007)
3. RANCANG BANGUN ALAT 3.1 Perancangan Alat
Alat yang dibuat dirancang sesederhana mungkin agar mudah dioperasikan oleh pengguna dalam kehidupan sehari - hari. Terdapat beberapa komponen yang diperlukan untuk membuat pendeteksi obyek di dalam ruangan menggunakan sensor infra merah yaitu sensor Sharp GP2Y0A21, motor servo, DFRDuino Uno, dan port usb yang digunakan untuk menghubungkan antarmuka program Processing.
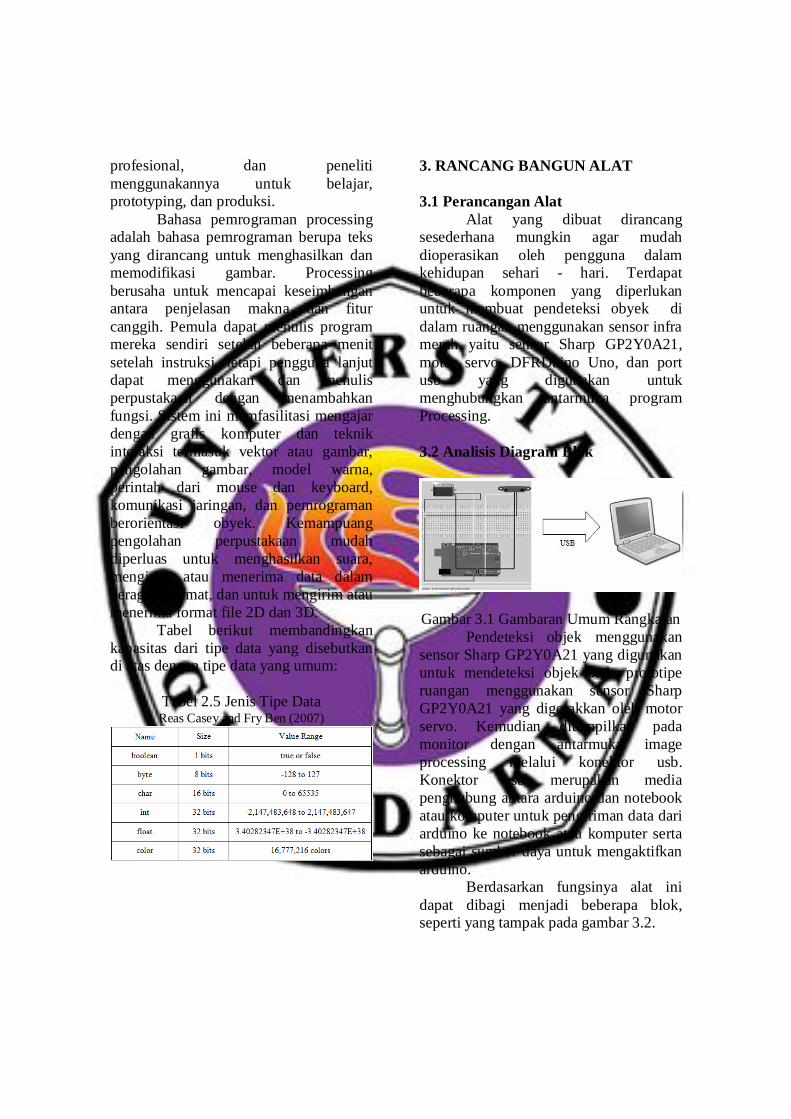
3.2 Analisis Diagram Blok
Gambar 3.1 Gambaran Umum Rangkaian Pendeteksi objek menggunakan
sensor Sharp GP2Y0A21 yang digunakan untuk mendeteksi objek pada prototipe ruangan menggunakan sensor Sharp GP2Y0A21 yang digerakkan oleh motor servo. Kemudian ditampilkan pada monitor dengan antarmuka image processing melalui konektor usb. Konektor usb merupakan media penghubung antara arduino dan notebook atau komputer untuk pengiriman data dari arduino ke notebook atau komputer serta sebagai sumber daya untuk mengaktifkan arduino.
Berdasarkan fungsinya alat ini dapat dibagi menjadi beberapa blok, seperti yang tampak pada gambar 3.2.
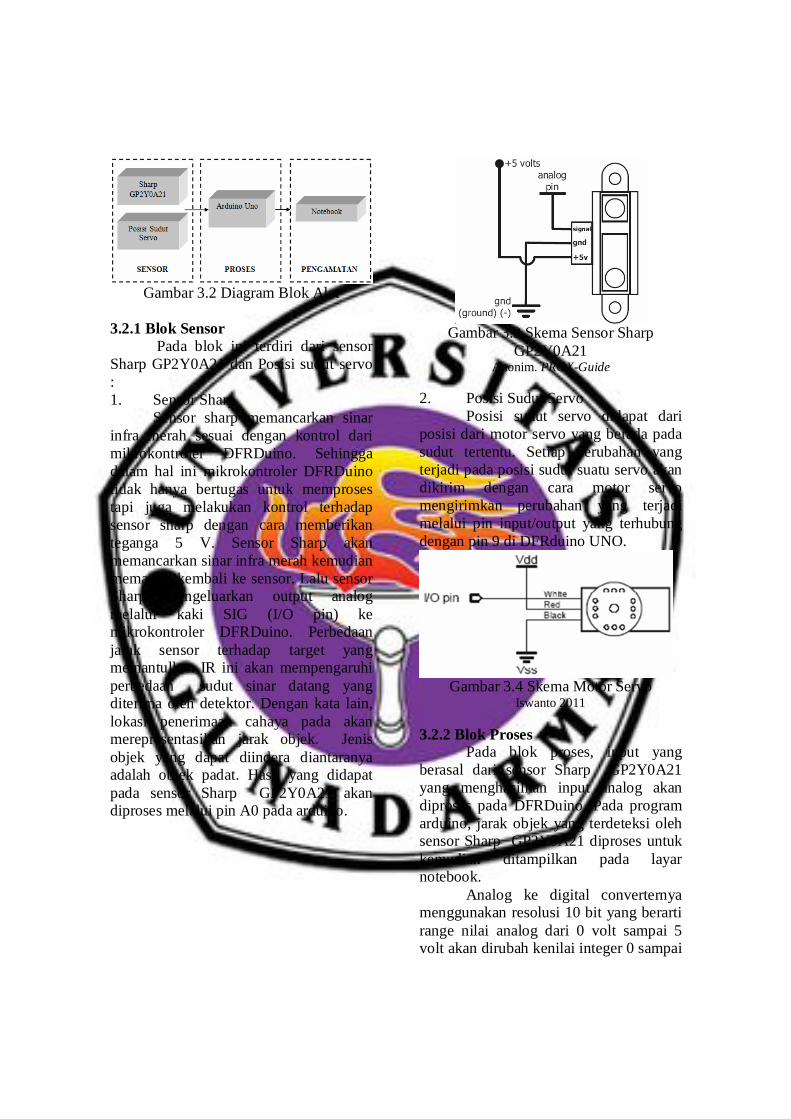
Gambar 3.2 Diagram Blok Alat
3.2.1 Blok Sensor
Pada blok ini terdiri dari sensor Sharp GP2Y0A21 dan Posisi sudut servo : 1. Sensor Sharp
Sensor sharp memancarkan sinar infra merah sesuai dengan kontrol dari mikrokontroler DFRDuino. Sehingga dalam hal ini mikrokontroler DFRDuino tidak hanya bertugas untuk memproses tapi juga melakukan kontrol terhadap sensor sharp dengan cara memberikan teganga 5 V. Sensor Sharp akan memancarkan sinar infra merah kemudian memantul kembali ke sensor. Lalu sensor Sharp mengeluarkan output analog melalui kaki SIG (I/O pin) ke mikrokontroler DFRDuino. Perbedaan jarak sensor terhadap target yang memantulkan IR ini akan mempengaruhi perbedaan sudut sinar datang yang diterima oleh detektor. Dengan kata lain, lokasi penerimaan cahaya pada akan merepresentasikan jarak objek. Jenis objek yang dapat diindera diantaranya adalah objek padat. Hasil yang didapat pada sensor Sharp GP2Y0A21 akan diproses melalui pin A0 pada arduino.
Gambar 3.3 Skema Sensor Sharp
GP2Y0A21 Anonim. PROX-Guide
2. Posisi Sudut Servo
Posisi sudut servo didapat dari posisi dari motor servo yang berada pada sudut tertentu. Setiap perubahan yang terjadi pada posisi sudut suatu servo akan dikirim dengan cara motor servo mengirimkan perubahan yang terjadi melalui pin input/output yang terhubung dengan pin 9 di DFRduino UNO.
Gambar 3.4 Skema Motor Servo
Iswanto 2011 3.2.2 Blok Proses Pada blok proses, input yang berasal dari sensor Sharp GP2Y0A21 yang menghasilkan input analog akan diproses pada DFRDuino. Pada program arduino, jarak objek yang terdeteksi oleh sensor Sharp GP2Y0A21 diproses untuk kemudian ditampilkan pada layar notebook. Analog ke digital converternya menggunakan resolusi 10 bit yang berarti range nilai analog dari 0 volt sampai 5 volt akan dirubah kenilai integer 0 sampai
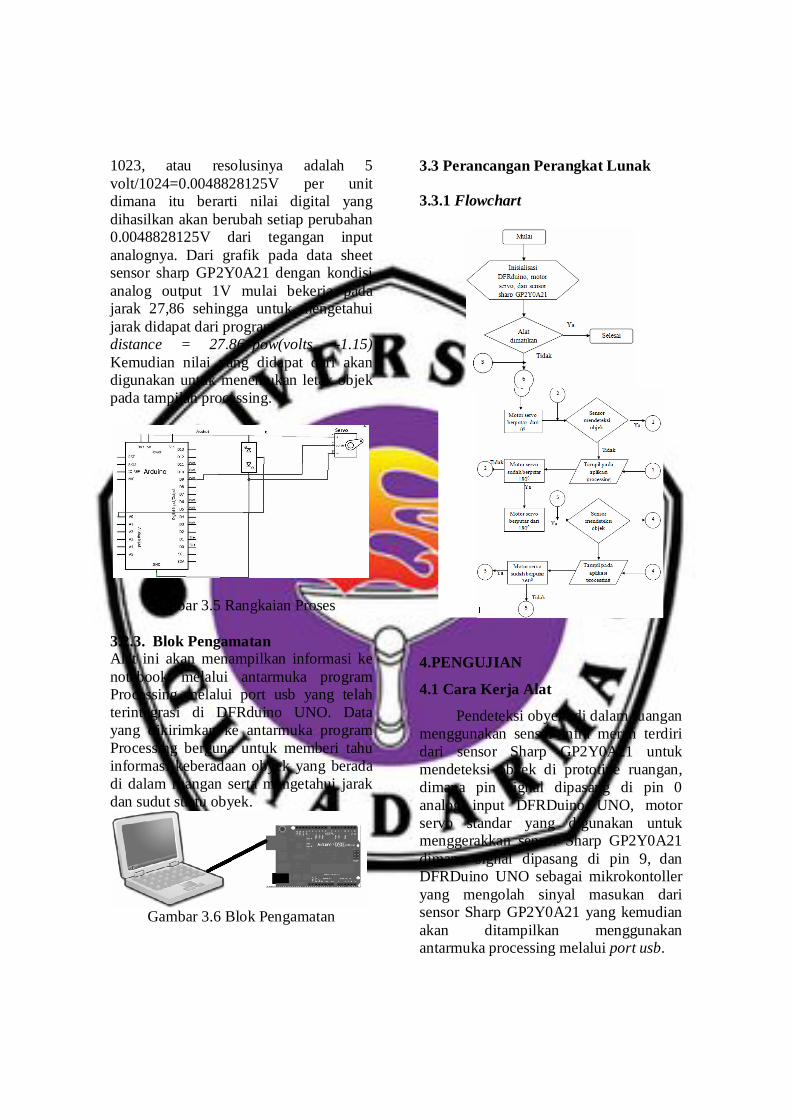
1023, atau resolusinya adalah 5 volt/1024=0.0048828125V per unit dimana itu berarti nilai digital yang dihasilkan akan berubah setiap perubahan 0.0048828125V dari tegangan input analognya. Dari grafik pada data sheet sensor sharp GP2Y0A21 dengan kondisi analog output 1V mulai bekerja pada jarak 27,86 sehingga untuk mengetahui jarak didapat dari program distance = 27.86*pow(volts, -1.15) Kemudian nilai yang didapat dari akan digunakan untuk menentukan letak objek pada tampilan processing.
Gambar 3.5 Rangkaian Proses 3.2.3. Blok Pengamatan Alat ini akan menampilkan informasi ke notebook melalui antarmuka program Processing melalui port usb yang telah terintegrasi di DFRduino UNO. Data yang dikirimkan ke antarmuka program Processing berguna untuk memberi tahu informasi keberadaan obyek yang berada di dalam ruangan serta mengetahui jarak dan sudut suatu obyek.
Gambar 3.6 Blok Pengamatan
3.3 Perancangan Perangkat Lunak
3.3.1 Flowchart
4.PENGUJIAN
4.1 Cara Kerja Alat
Pendeteksi obyek di dalam ruangan menggunakan sensor infra merah terdiri dari sensor Sharp GP2Y0A21 untuk mendeteksi obyek di prototipe ruangan, dimana pin signal dipasang di pin 0 analog input DFRDuino UNO, motor servo standar yang digunakan untuk menggerakkan sensor Sharp GP2Y0A21 dimana signal dipasang di pin 9, dan DFRDuino UNO sebagai mikrokontoller yang mengolah sinyal masukan dari sensor Sharp GP2Y0A21 yang kemudian akan ditampilkan menggunakan antarmuka processing melalui port usb.
4.2 Cara Pengoperasian Alat Memasang kabel usb pada
DFRDuino UNO untuk menghubungkan dengan laptop.
Menjalankan program yang telah dibuat dengan menggunakan processing.
Untuk melakukan pengukuran terhadap obyek yang dideteksi, letakkan obyek di dalam ruangan.
4.3 Uji Coba Alat
Uji coba alat bertujuan untuk mengetahui kesesuaian alat dengan hasil yang diinginkan. Uji coba dilakukan dengan menetapkan empat obyek yang berbeda yaitu deodoran, spidol, kaleng permen, dan tangan manusia. keempat obyek tersebut diujikan untuk menguji sensor infra merah dalam mendeteksi suatu obyek, Uji coba yang dilakukan yaitu ; 1. Pengujian pertama, membandingkan
jarak sebenarnya dari suatu obyek dengan jarak pada radar serta letak dari obyek tersebut yang terdeteksi pada radar.
2. Pengujian kedua, mendeteksi pergerakan dari suatu obyek dengan arah pergerakan yang berbeda-beda dan pengaruh cahaya terhadap sensor infra merah.
4.3.1 Pengujian Pertama
Pada pengujian pertama, hal yang pertama dilakukan adalah menentukan letak obyek kemudian mengukur jarak antara sensor infra merah dengan obyek menggunakan penggaris. Lalu nyalakan alat, setelah itu melakukan pengamatan terhadap obyek dengan mengamati jarak dan letak obyek pada radar pada setiap percobaan. Total ada lima percobaan
yang dilakukan, dapat di lihat pada tabel di bawah ini.
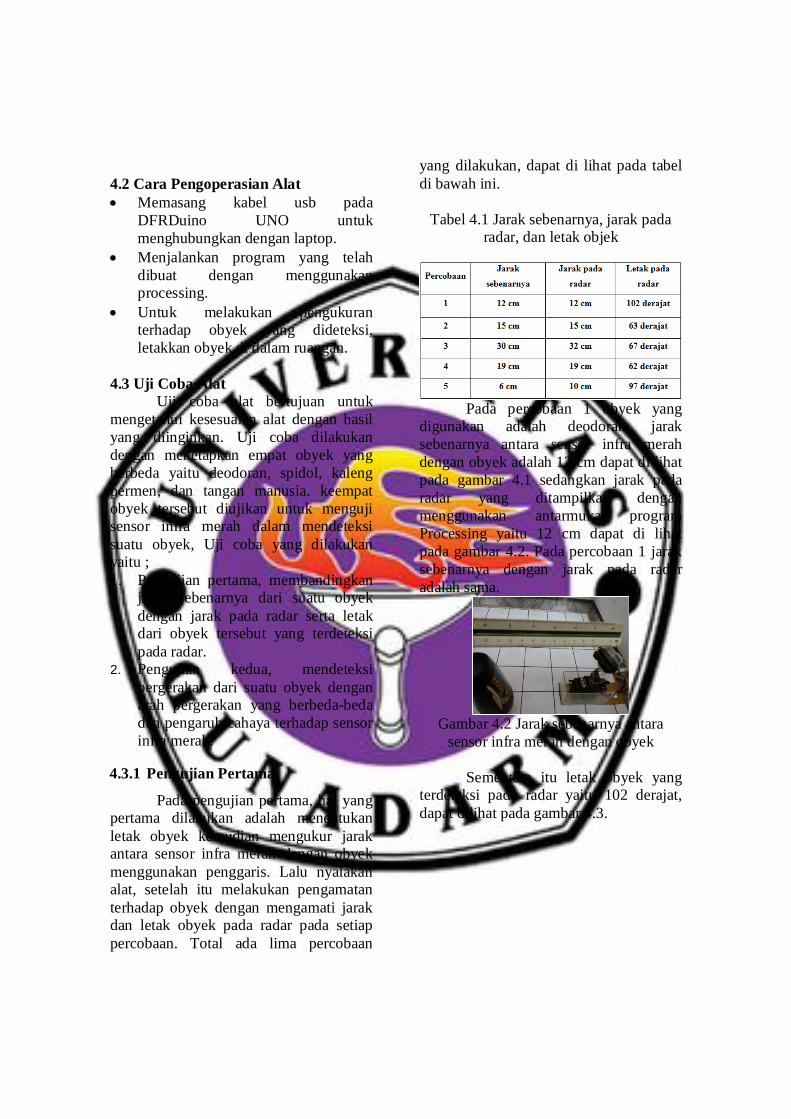
Tabel 4.1 Jarak sebenarnya, jarak pada
radar, dan letak objek
Pada percobaan 1 obyek yang
digunakan adalah deodoran. jarak sebenarnya antara sensor infra merah dengan obyek adalah 12 cm dapat di lihat pada gambar 4.1 sedangkan jarak pada radar yang ditampilkan dengan menggunakan antarmuka program Processing yaitu 12 cm dapat di lihat pada gambar 4.2. Pada percobaan 1 jarak sebenarnya dengan jarak pada radar adalah sama.
Gambar 4.2 Jarak sebenarnya antara
sensor infra merah dengan obyek Sementara itu letak obyek yang
terdeteksi pada radar yaitu 102 derajat, dapat dilihat pada gambar 4.3.
Gambar 4.3 Letak obyek dan jarak pada
radar 4.3.2 Pengujian Kedua Pada pengujian kedua, hal yang dilakukan adalah menentukan letak obyek. Lalu nyalakan alat, setelah itu melakukan pengamatan terhadap obyek yang bergerak.
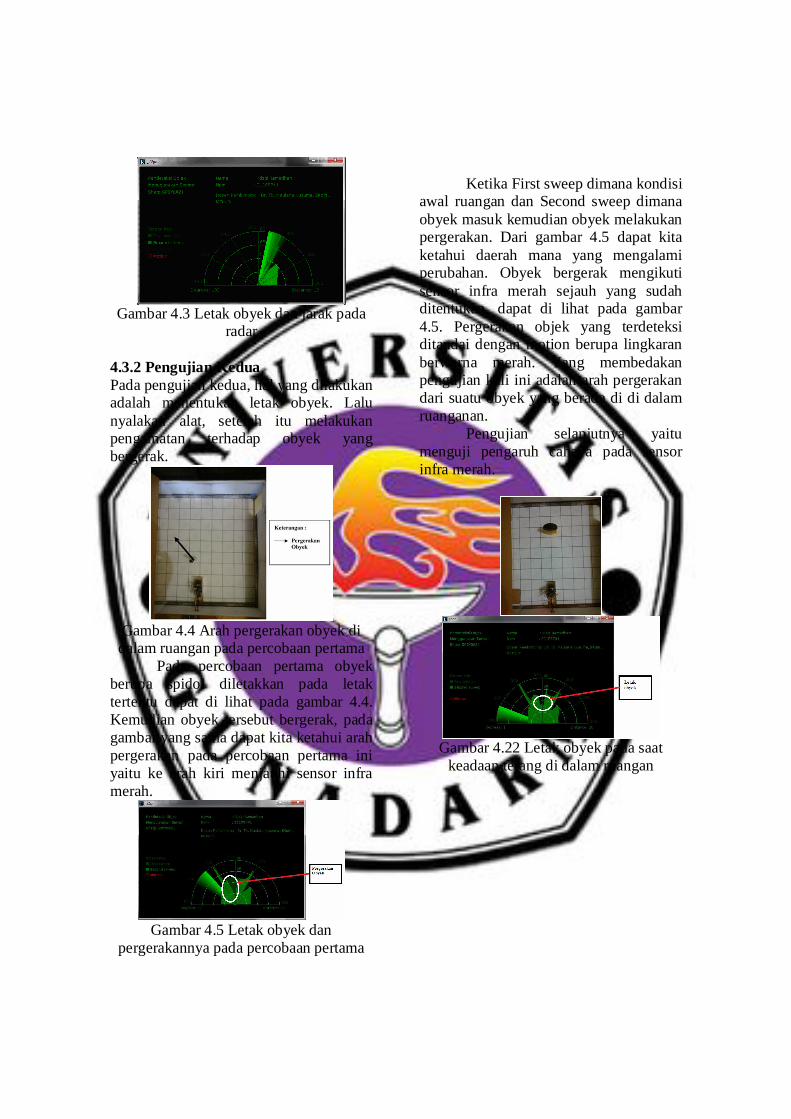
Gambar 4.4 Arah pergerakan obyek di dalam ruangan pada percobaan pertama
Pada percobaan pertama obyek berupa spidol diletakkan pada letak tertentu dapat di lihat pada gambar 4.4. Kemudian obyek tersebut bergerak, pada gambar yang sama dapat kita ketahui arah pergerakan pada percobaan pertama ini yaitu ke arah kiri menjauhi sensor infra merah.
Gambar 4.5 Letak obyek dan
pergerakannya pada percobaan pertama
Ketika First sweep dimana kondisi
awal ruangan dan Second sweep dimana obyek masuk kemudian obyek melakukan pergerakan. Dari gambar 4.5 dapat kita ketahui daerah mana yang mengalami perubahan. Obyek bergerak mengikuti sensor infra merah sejauh yang sudah ditentukan, dapat di lihat pada gambar 4.5. Pergerakan objek yang terdeteksi ditandai dengan motion berupa lingkaran berwarna merah. Yang membedakan pengujian kali ini adalah arah pergerakan dari suatu obyek yang berada di di dalam ruanganan.
Pengujian selanjutnya yaitu menguji pengaruh cahaya pada sensor infra merah.
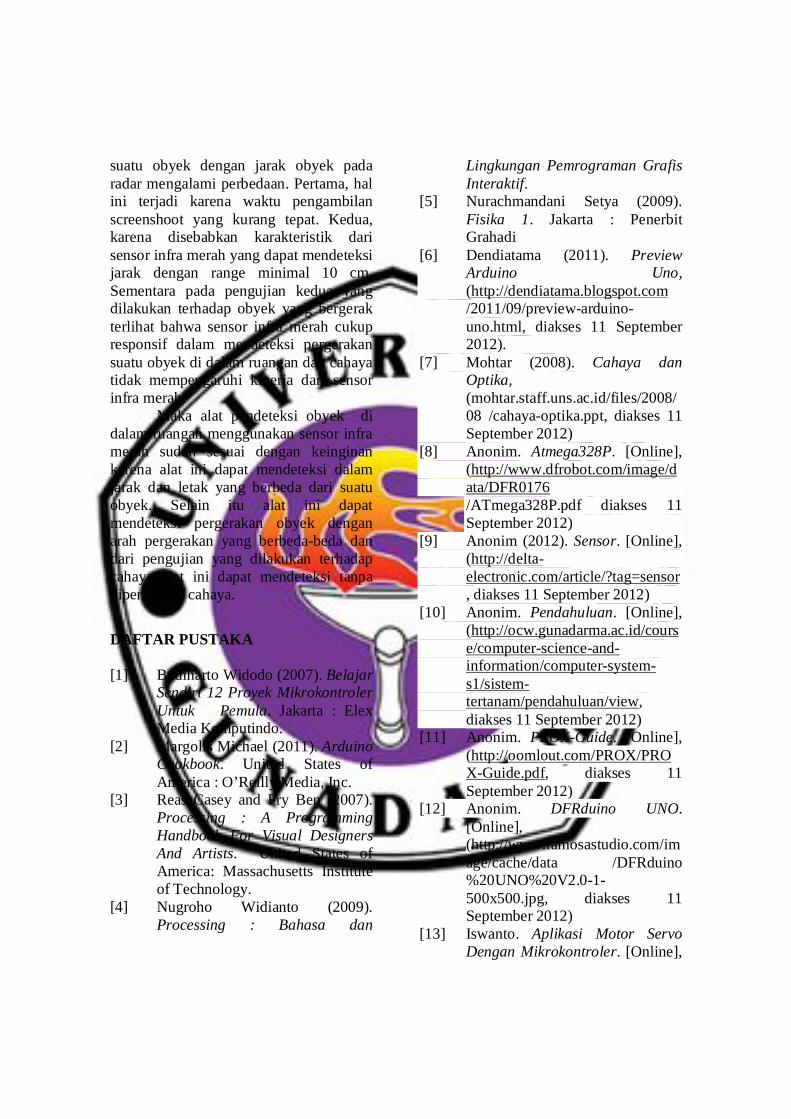
Gambar 4.22 Letak obyek pada saat
keadaan terang di dalam ruangan
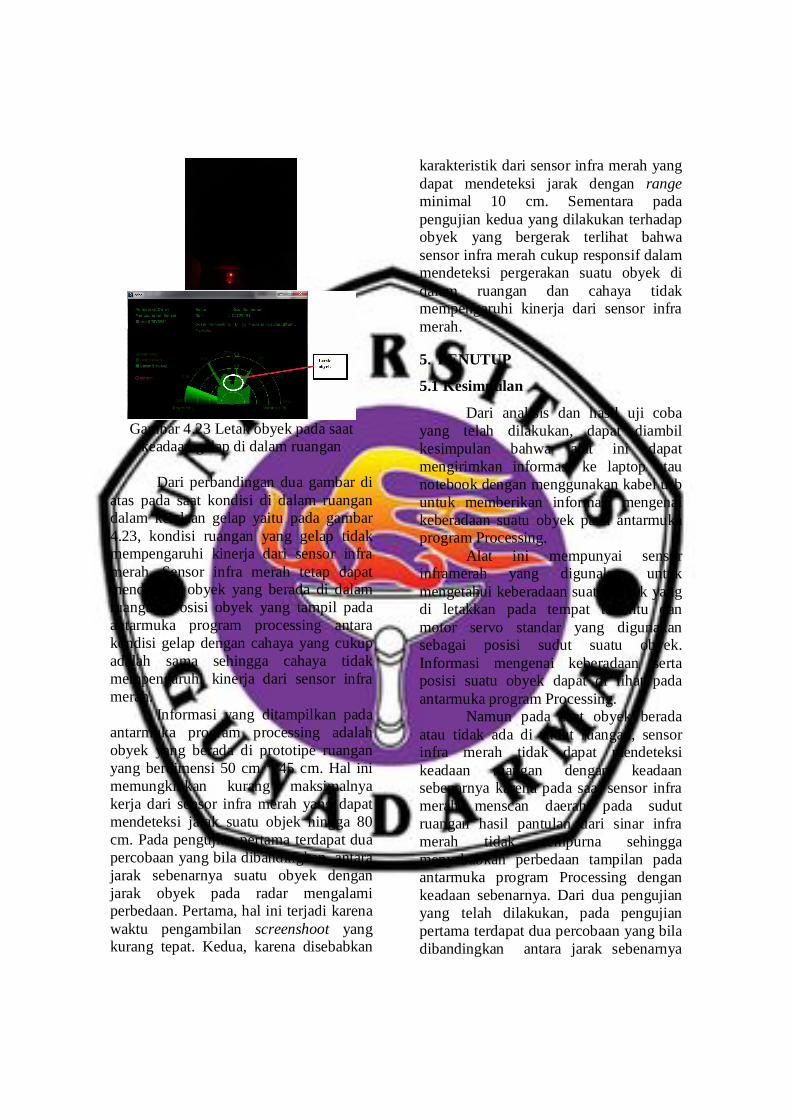
Gambar 4.23 Letak obyek pada saat
keadaan gelap di dalam ruangan Dari perbandingan dua gambar di
atas pada saat kondisi di dalam ruangan dalam keadaan gelap yaitu pada gambar 4.23, kondisi ruangan yang gelap tidak mempengaruhi kinerja dari sensor infra merah. Sensor infra merah tetap dapat mendeteksi obyek yang berada di dalam ruangan. Posisi obyek yang tampil pada antarmuka program processing antara kondisi gelap dengan cahaya yang cukup adalah sama sehingga cahaya tidak mempengaruhi kinerja dari sensor infra merah.
Informasi yang ditampilkan pada antarmuka program processing adalah obyek yang berada di prototipe ruangan yang berdimensi 50 cm * 45 cm. Hal ini memungkinkan kurang maksimalnya kerja dari sensor infra merah yang dapat mendeteksi jarak suatu objek hingga 80 cm. Pada pengujian pertama terdapat dua percobaan yang bila dibandingkan antara jarak sebenarnya suatu obyek dengan jarak obyek pada radar mengalami perbedaan. Pertama, hal ini terjadi karena waktu pengambilan screenshoot yang kurang tepat. Kedua, karena disebabkan
karakteristik dari sensor infra merah yang dapat mendeteksi jarak dengan range minimal 10 cm. Sementara pada pengujian kedua yang dilakukan terhadap obyek yang bergerak terlihat bahwa sensor infra merah cukup responsif dalam mendeteksi pergerakan suatu obyek di dalam ruangan dan cahaya tidak mempengaruhi kinerja dari sensor infra merah.
5. PENUTUP
5.1 Kesimpulan
Dari analisis dan hasil uji coba yang telah dilakukan, dapat diambil kesimpulan bahwa alat ini dapat mengirimkan informasi ke laptop atau notebook dengan menggunakan kabel usb untuk memberikan informasi mengenai keberadaan suatu obyek pada antarmuka program Processing. Alat ini mempunyai sensor inframerah yang digunakan untuk mengetahui keberadaan suatu obyek yang di letakkan pada tempat tertentu dan motor servo standar yang digunakan sebagai posisi sudut suatu obyek. Informasi mengenai keberadaan serta posisi suatu obyek dapat di lihat pada antarmuka program Processing.
Namun pada saat obyek berada atau tidak ada di sudut ruangan, sensor infra merah tidak dapat mendeteksi keadaan ruangan dengan keadaan sebenarnya karena pada saat sensor infra merah menscan daerah pada sudut ruangan hasil pantulan dari sinar infra merah tidak sempurna sehingga menyebabkan perbedaan tampilan pada antarmuka program Processing dengan keadaan sebenarnya. Dari dua pengujian yang telah dilakukan, pada pengujian pertama terdapat dua percobaan yang bila dibandingkan antara jarak sebenarnya
suatu obyek dengan jarak obyek pada radar mengalami perbedaan. Pertama, hal ini terjadi karena waktu pengambilan screenshoot yang kurang tepat. Kedua, karena disebabkan karakteristik dari sensor infra merah yang dapat mendeteksi jarak dengan range minimal 10 cm. Sementara pada pengujian kedua yang dilakukan terhadap obyek yang bergerak terlihat bahwa sensor infra merah cukup responsif dalam mendeteksi pergerakan suatu obyek di dalam ruangan dan cahaya tidak mempengaruhi kinerja dari sensor infra merah.
Maka alat pendeteksi obyek di dalam ruangan menggunakan sensor infra merah sudah sesuai dengan keinginan karena alat ini dapat mendeteksi dalam jarak dan letak yang berbeda dari suatu obyek. Selain itu alat ini dapat mendeteksi pergerakan obyek dengan arah pergerakan yang berbeda-beda dan dari pengujian yang dilakukan terhadap cahaya alat ini dapat mendeteksi tanpa dipengaruhi cahaya.
DAFTAR PUSTAKA [1] Budiharto Widodo (2007). Belajar
Sendiri 12 Proyek Mikrokontroler Untuk Pemula. Jakarta : Elex Media Komputindo.
[2] Margolis Michael (2011). Arduino Cookbook. United States of America : O’Reilly Media, Inc.
[3] Reas Casey and Fry Ben (2007). Processing : A Programming Handbook For Visual Designers And Artists. United States of America: Massachusetts Institute of Technology.
[4] Nugroho Widianto (2009). Processing : Bahasa dan
Lingkungan Pemrograman Grafis Interaktif.
[5] Nurachmandani Setya (2009). Fisika 1. Jakarta : Penerbit Grahadi
[6] Dendiatama (2011). Preview Arduino Uno, (http://dendiatama.blogspot.com /2011/09/preview-arduino-uno.html, diakses 11 September 2012).
[7] Mohtar (2008). Cahaya dan Optika, (mohtar.staff.uns.ac.id/files/2008/08 /cahaya-optika.ppt, diakses 11 September 2012)
[8] Anonim. Atmega328P. [Online], (http://www.dfrobot.com/image/data/DFR0176 /ATmega328P.pdf diakses 11 September 2012)
[9] Anonim (2012). Sensor. [Online], (http://delta-electronic.com/article/?tag=sensor, diakses 11 September 2012)
[10] Anonim. Pendahuluan. [Online], (http://ocw.gunadarma.ac.id/course/computer-science-and-information/computer-system-s1/sistem-tertanam/pendahuluan/view, diakses 11 September 2012)
[11] Anonim. PROX-Guide. [Online], (http://oomlout.com/PROX/PROX-Guide.pdf, diakses 11 September 2012)
[12] Anonim. DFRduino UNO. [Online], (http://www.famosastudio.com/image/cache/data /DFRduino %20UNO%20V2.0-1-500x500.jpg, diakses 11 September 2012)
[13] Iswanto. Aplikasi Motor Servo Dengan Mikrokontroler. [Online],

(http://iswanto.staff.umy.ac.id /2011/03/19/aplikasi-motor-servo-dengan-mikrokontroler-at89s51-dengan-sdcc/, diakses 11 September 2012)
[14] Anonim. Teori Dasar. [Online], (http://ml.scribd.com/doc/44697046/BAB-II, diakses 11 September 2012)
[15] Anonim. [Online], (http://www.imagesco.com/images/servomotors/HSR-1425CR.jpg, diakses 12 September 2012)
[16] Anonim. [Online], (http://www.antratek.com/images/Parallax%20Standard %20Servo.jpg, diakses 12 September 2012)





























