Embed Size (px)
Citation preview

Marek Pietrzakowski
Wytrzymałość materiałów
Warszawa 2010

Politechnika Warszawska
Wydział Samochodów i Maszyn Roboczych
Kierunek studiów "Edukacja techniczno informatyczna"
02-524 Warszawa, ul. Narbutta 84, tel. (22) 849 43 07, (22) 234 83 48
ipbmvr.simr.pw.edu.pl/spin/, e-mail: [email protected]
Opiniodawca: prof. dr hab. inż. Krzysztof GOŁOŚ
Projekt okładki: Norbert SKUMIAŁ, Stefan TOMASZEK
Projekt układu graficznego tekstu: Grzegorz LINKIEWICZ
Skład tekstu: Janusz BONAROWSKI
Publikacja bezpłatna, przeznaczona dla studentów kierunku studiów
"Edukacja techniczno informatyczna"
Copyright © 2011 Politechnika Warszawska
Utwór w całości ani we fragmentach nie może być powielany
ani rozpowszechniany za pomocą urządzeń elektronicznych, mechanicznych,
kopiujących, nagrywających i innych bez pisemnej zgody posiadacza praw
autorskich.
ISBN 83-89703-50-5
Druk i oprawa: STUDIO MULTIGRAF SP. Z O.O.,
ul. Ołowiana 10, 85-461 Bydgoszcz

Spis treści
Wstęp...................................................................... 7
1. Przedmiot wytrzymałości materiałów............... 9
2. Podstawowe pojęcia........................................ 13
3. Pręt jako model geometryczny. Siły wewnętrzne w pręcie ............................... 19
4. Rozciąganie i ściskanie pręta prostego o stałym przekroju........................................... 22
4.1. Zasada de Saint-Venanta ..............................................26
4.2. Zasada superpozycji ........................................................27
4.3. Określenie podstawowych właściwości mechanicznych
materiału – statyczna próba rozciągania ......................28
4.4. Obliczenia wytrzymałościowe prętów
na rozciąganie i ściskanie ..............................................32
4.5. Uwagi o spiętrzeniu naprężeń .......................................33
4.6. Statycznie niewyznaczalne układy prętowe..................35
5. Momenty bezwładności figur płaskich............. 41
5.1. Momenty bezwładności względem osi przesuniętych...44
5.2. Momenty bezwładności względem osi obróconych ........45
6. Skręcanie prętów o przekrojach kołowych...... 49
6.1. Obliczenia wytrzymałościowe na skręcanie ..................54
6.2. Przykłady obliczeń .........................................................55
7. Ścinanie pręta prostego ................................... 59

8. Zginanie prętów ............................................... 63
8.1. Siły poprzeczne i momenty gnące w belkach.................65
8.2. Zależności różniczkowe między obciążeniem
i siłami wewnętrznymi...................................................69
8.3. Równomierne zginanie belki – naprężenia i odkształcenia
.........................................................................................71
8.4. Obliczenia wytrzymałościowe na zginanie ....................75
8.5. Równanie różniczkowe ugiętej osi belki ........................77
8.6. Przykłady zastosowania metody Clebscha....................84
9. Elementy teorii stanu naprężenia .................... 89
9.1. Płaski stan naprężenia ..................................................91
9.2. Odwzorowanie płaskiego stanu naprężenia kołem Mohra
.........................................................................................95
10. Stan odkształcenia. Uogólnione prawo Hooke’a............................. 97
11. Hipotezy wytężenia ...................................... 101
11.1. Przegląd wybranych hipotez wytężenia ....................102
12. Złożone działanie sił wewnętrznych w prętach prostych ....................................... 107
12.1. Zginanie z rozciąganiem lub ściskaniem...................108
12.2. Zginanie ze skręcaniem .............................................110
12.3. Przykłady obliczeń .....................................................112
13. Metody energetyczne - układy liniowosprężyste........................................... 117
13.1. Energia sprężysta układów liniowosprężystych........119
13.2. Twierdzenie Castigliana ............................................121
13.3. Przykłady wyznaczania przemieszczeń
w układach prętowych ................................................123
13.4. Zasada minimum energii Menabrei-Castigliana ......130

Strona 5555
13.5. Przykłady wyznaczania wielkości
statycznie niewyznaczalnych ......................................131
14. Stateczność prętów ściskanych ................... 137
14.1. Sprężyste wyboczenie pręta.......................................138
14.2. Niesprężyste wyboczenie pręta..................................143
14.3. Przykłady obliczeń na wyboczenie.............................144
15. Podstawy teorii błonowej powłok osiowosymetrycznych .................................. 149
15.1. Zbiornik kulisty i zbiornik walcowy ..........................152
16. Zmęczenie materiału.................................... 157
16.1. Cykle zmian naprężenia ............................................158
16.2. Podstawowe badania zmęczeniowe ...........................161
16.3. Wytrzymałość zmęczeniowa przy cyklach dowolnych162
16.4. Czynniki wpływające na wytrzymałość zmęczeniową164
17. Literatura...................................................... 167


Wstęp Niniejsze materiały zostały opracowane w ramach realizacji Programu
Rozwojowego Politechniki Warszawskiej współfinansowanego ze środ-
ków PROGRAMU OPERACYJNEGO KAPITAŁ LUDZKI. Przezna-
czone są dla studentów studiów inżynierskich na kierunku „Edukacja
techniczno-informatyczna” na Wydziale Samochodów i Maszyn Robo-
czych Politechniki Warszawskiej.
Swoim zakresem obejmuje zagadnienia określone w programie studiów dla przedmiotu kształcenia nauczycielskiego pt.
„Wytrzymałość materiałów” opisanym w sylabusie
opracowanym dla tego przedmiotu. Zawartość merytoryczna programu przedmiotu spełnia wymagania określone w standardach kształcenia Ministerstwa Nauki i Szkolnictwa
Wyższego dla kierunku „Edukacja techniczno-informatyczna”.
Materiały uzupełniające i aktualizujące do przedmiotu będą udostępniane studentom za pośrednictwem systemu e-learning.


1 Przedmiot wytrzymałości materiałów

ROZDZIAŁ 1
Strona 10101010
W mechanice ogólnej modelem ciała stałego jest ciało sztywne. Z obser-
wacji wiadomo, że ciało rzeczywiste jest ciałem odkształcalnym. Mecha-
niką ciała stałego odkształcalnego przystosowaną do potrzeb techniki
jest wytrzymałość materiałów. Wytrzymałość materiałów jest nauką o
trwałości typowych elementów konstrukcji będących pod działaniem sił.
Podstawowym zadaniem wytrzymałości materiałów jest określenie:
• wytrzymałości konstrukcji tzn. odporności konstrukcji na
zniszczenie,
• sztywności konstrukcji tzn. odporności konstrukcji na
deformację.
Ilościowa ocena wytrzymałości i sztywności konstrukcji, poprzez wy-
znaczenie naprężeń i odkształceń, a następnie odniesienie ich do odpo-
wiednich wartości dopuszczalnych, umożliwia ocenę konstrukcji pod
względem bezpieczeństwa i trwałości, oraz dostatecznej sztywności.
Realizacja zadań wytrzymałości materiałów wymaga wprowadzenia uza-
sadnionych technicznie uproszczeń.
Główne uproszczenia dotyczą modelu ciała odkształcalnego.
Przyjmujemy, że materiał ciała jest jednorodny i izotropowy, tzn. jego
właściwości są identyczne we wszystkich kierunkach, oraz wykazuje
właściwości sprężyste. Cecha sprężystości oznacza całkowitą lub czę-ściową zdolność ciała do odzyskania pierwotnego kształtu. Ze względu
na tę cechę można wyróżnić materiały idealnie sprężyste, w których po
odciążeniu nie występują odkształcenia trwałe, oraz materiały sprężys-
toplastyczne i plastyczne.
W zakresie uproszczeń geometrycznych wprowadza się modele elemen-
tów konstrukcji. Podstawowymi modelami geometrycznymi są: pręty,
w których jeden wymiar jest znacznie większy od pozostałych; powłoki,
których grubość jest mała w stosunku do pozostałych wymiarów; bryły
o trzech wymiarach tego samego rzędu.

PRZEDMIOT WYTRZYMAŁOŚCI MATERIAŁÓW
Strona 11111111
Wytrzymałość i sztywność elementu zależą od wielu czynników. Do
najważniejszych należy zaliczyć:
• rodzaj materiału i jego stan (zależny od rodzaju obróbki),
• kształt i wymiary elementu,
• rodzaj i wartości sił oraz ich przebieg w czasie.

ROZDZIAŁ 1
Strona 12121212

`
2 Podstawowe pojęcia

ROZDZIAŁ 2
Strona 14141414
Podstawowymi pojęciami stosowanymi w wytrzymałości materiałów są siły wewnętrzne, naprężenia i odkształcenia.
Siły wewnętrzne
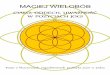
Weźmy pod uwagę ciało poddane działaniu układu sił zewnętrznych P1,
P2,...Pn będących w równowadze. Przetnijmy umownie ciało na dwie
części I i II (rysunek 2.1).
Rysunek 2.1
Wzajemne oddziaływanie każdej części ciała sprowadza się do układu sił
wewnętrznych rozłożonych na powierzchni przekroju. Siły powierz-
chniowe wraz z siłami zewnętrznymi działającymi na rozpatrywaną część spełniają warunki równowagi.
Dokonując redukcji sił powierzchniowych do dowolnego punktu B
przekroju, wyznaczamy wektor główny sił wewnętrznych Pw i moment
główny MwB (rysunek 2.2).

PODSTAWOWE POJĘCIA
Strona 15151515
Rysunek 2.2
W celu wyznaczenia sił wewnętrznych stosujemy ogólne warunki
równowagi zgodnie z zasadą zesztywnienia. Siły wewnętrzne działające
na części ciała oddzielone umownym przekrojem są wektorami
przeciwnymi.
Naprężenia
W wyniku redukcji sił wewnętrznych działających na element pola ∆A
wydzielony wokół dowolnego punktu przekroju otrzymujemy wektor
główny ∆Pw (rysunek 2.3).
Naprężeniem w danym punkcie przekroju nazywamy granicę, do której
dąży iloraz siły wewnętrznej ∆Pw i elementu pola ∆A, na który ta siła
działa, gdy element pola dąży do zera.
A
Pw
A ∆
∆=
→∆ 0limp (2.1)
Jednostką naprężenia jest paskal – Pa = N/m2.
Naprężenie w danym punkcie przekroju jest wektorem. Wektor ten
można rozłożyć na składowe: σ - naprężenie normalne i τ - naprężenie
styczne (rysunek 2.4).

ROZDZIAŁ 2
Strona 16161616
Rysunek 2.3
Rysunek 2.4
Wektor naprężenia związany jest z płaszczyzną przekroju. Przez dany
punkt przechodzi nieskończenie wiele płaszczyzn, którym odpowiadają inne wektory naprężenia (przecinanie różnych więzów łączących dany
punkt z jego otoczeniem).
Stan naprężenia w danym punkcie ciała określa nieskończony zbiór
wektorów naprężeń p odpowiadających wszystkim kierunkom przekro-
jów zawierających ten punkt.
Przemieszczenia
Przemieszczenie dowolnego punktu M ciała jest wektorem, którego po-
czątek jest w punkcie M przed odkształceniem, a koniec w punkcie M’
po odkształceniu (rysunek 2.5)

PODSTAWOWE POJĘCIA
Strona 17171717
Rysunek 2.5
kwjviu ++=q (2.2)
gdzie: u, v, w – składowe przemieszczenia w kierunku osi układu
współrzędnych x, y, z.
Odkształcenia
Weźmy pod uwagę ciało obciążone siłami P1, P2, ...,Pn. Punkty A i B
oddalone od siebie o l po odkształceniu zajmą położenie A’ i B’
(rysunek 2.6). Zmiana odległości punktów A i B określa wydłużenie lub
skrócenie odcinka l
lll −=∆ ' (2.3)
Średnie odkształcenie względne jest ilorazem zmiany długości odcinka
do jego długości przed odkształceniem
l
lśr
∆=ε (2.4)
Odkształcenie względne w dowolnym punkcie ciała definiowane jest
następująco
l
l
l
∆=
→0limε (2.5)

ROZDZIAŁ 2
Strona 18181818
Rysunek 2.6
Odkształcenie względne (wydłużenie lub skrócenie) jest granicą ilorazu
przyrostu odległości między punktami ciała i ich wzajemnej odległości
przed obciążeniem, gdy odległość ta dąży do zera. Przyjmujemy, że
odkształcenie ε jest dodatnie, gdy przyrost ∆l jest dodatni.
Biorąc pod uwagę zmianę kąta między osiami układu prostokątnego O,
x, y (rysunek 2.6), definiujemy odkształcenie postaciowe, które oznacza-
my symbolem γ. Kąt odkształcenia postaciowego w dowolnym punkcie
elementu jest to kąt o jaki zmienia się wzajemne położenie linii przecina-
jących się w tym punkcie.

`
3 Pręt jako model geometryczny. Siły wewnętrzne w pręcie

ROZDZIAŁ 3
Strona 20202020
Pręt jest modelem geometrycznym, który powstaje przez przesunięcie
dowolnej figury płaskiej wzdłuż linii prostej lub krzywej w taki sposób,
że środek figury leży na tej linii i płaszczyzna figury jest do niej prosto-
padła. Linię tę nazywamy osią pręta, a przesuwana figura wyznacza
przekrój pręta (normalny).
Ze względu na przekrój rozróżniamy pręty o stałym lub zmiennym
przekroju, ze względu na kształt osi – pręty proste lub zakrzywione.
W celu wyznaczenia sił wewnętrznych w pręcie przyjmujemy środek
redukcji w środku geometrycznym (ciężkości) przekroju pręta. Wyzna-
czamy wektor główny Pw i moment główny Mw sił wewnętrznych (rysu-
nek 3.1). Rzutując wektor główny Pw i moment główny Mw na kierunki
normalny i styczny do przekroju otrzymujemy składowe: N – siłę podłużną (osiową), T – siłę poprzeczną (tnącą), Ms – moment skręcający
oraz Mg – moment gnący.
Rysunek 3.1
Jeżeli w przekroju pręta jest tylko jedna składowa sił wewnętrznych, to
mamy do czynienia z prostym zagadnieniem wytrzymałości pręta. A za-
tem, można wymienić następujące proste zagadnienia:
1. rozciąganie lub ściskanie – siła podłużna N,
2. ścinanie – siła poprzeczna T,
3. skręcanie – moment skręcający Ms,
4. zginanie (czyste) – moment gnący Mg.

PRĘT JAKO MODEL GEOMETRYCZNY. SIŁY WEWNĘTRZNE W PRĘCIE
Strona 21212121

`
4 Rozciąganie i ściskanie pręta prostego o stałym przekroju

ROZCIĄGANIE I ŚCISKANIE PRĘTA PROSTEGO O STAŁYM PRZEKROJU
Strona 23232323
Rozpatrzmy pręt prosty o stałym przekroju A, długości l, obciążony
osiową siłą P (rysunek 4.1).
Rysunek 4.1
Warunek równowagi części pręta odciętej współrzędną x ma postać
PN = (4.1)
Zakładając równomierny rozkład naprężeń w przekroju pręta mamy
AdANA
σσ == ∫ (4.2)
stąd
A
P
A
N==σ (4.3)
Pod wpływem siły rozciągającej pręt odkształca się, zmieniając wymiary
podłużne i poprzeczne. Na podstawie doświadczeń można przyjąć, że
przekroje po odkształceniu są płaskie i prostopadłe do osi pręta (hipoteza
płaskich przekrojów). Przesunięcie przekroju o współrzędnej x oznacz-
my symbolem u, a wzajemne przesunięcie przekrojów odległych o dx
jako du (rysunek 4.2).

ROZDZIAŁ 4
Strona 24242424
Rysunek 4.2
Całkowite wydłużenie wynosi
ll −= 'λ (4.4)
Odkształcenie względne (zwane też odkształceniem wzdłużnym) dane
jest wzorem
dx
du=ε (4.5)
Z założenia płaskich przekrojów wynika, że odkształcenie ε w obszarze
przekroju jest stałe. Przyjmując równomierność odkształcenia wzdłuż osi
pręta, całkowite wydłużenie λ można wyznaczyć z zależności
ldxu
l
lx εελ === ∫=
0
(4.6)
A zatem, odkształcenie wzdłużne jest ilorazem całkowitego wydłużenia
i początkowej długości pręta
l
λε = (4.7)
Podczas rozciągania zmieniają się także wymiary poprzeczne pręta.
Odkształcenie poprzeczne ε′ ze względu na zmniejszenie się średnicy
pręta d′ jest ujemneStosunek bezwzględnych wartości odkształcenia

ROZCIĄGANIE I ŚCISKANIE PRĘTA PROSTEGO O STAŁYM PRZEKROJU
Strona 25252525
poprzecznego do wzdłużnego jest liczbą stałą zależną od właściwości
materiału, a zatem mamy
0'
' <−
=d
ddε (4.8)
ενε −=' (4.9)
gdzie: ν - liczba (współczynnik) Poissona.
Liczba Poissona dla większości materiałów ma wartości 1/6 < ν < 1/2.
Na podstawie doświadczeń Robert Hooke (1672) sformułował zależność między odkształceniem i naprężeniem. Zgodnie z tą zależnością, naz-
waną prawem Hooke’a, wydłużenie jest proporcjonalne do naprężenia,
które je spowodowało
E
σε = (4.10)
gdzie: E oznacza moduł Younga lub moduł sprężystości podłużnej, który
np. dla stali wynosi E = 2,1·1011
Pa.
Podstawiając do wzoru (4.6) zależność (4.10) oraz uwzględniając wzór
(4.3) wyznaczamy wydłużenie pręta w funkcji siły wewnętrznej
EA
lNdx
EA
Ndx
E
ll
=== ∫∫00
σλ (4.11)
lub w funkcji zewnętrznego obciążenia
EA
lP=λ (4.12)
gdzie: iloczyn EA oznacza sztywność pręta na rozciąganie [N].

ROZDZIAŁ 4
Strona 26262626
4.1. Zasada de Saint-Venanta
W przedstawionych rozważaniach przyjęto równomierny rozkład naprę-żeń w przekroju pręta. Nasuwa się pytanie, czy sposób realizacji obcią-żenia pręta ma wpływ na rozkład naprężeń.
Weźmy pod uwagę trzy jednakowe pręty o średnicy d ściskane statycz-
nie równoważnym obciążeniem odpowiadającym sile P. Pierwszy ścis-
kany jest siłą równomiernie rozłożoną na całej powierzchni przekroju,
drugi – siłą równomiernie rozłożoną na część przekroju, trzeci – siłą skupioną na niewielkiej powierzchni. Schemat doświadczenia i jego
rezultaty pokazano na rysunku 4.3.
Można stwierdzić, że rozkłady naprężeń w pobliżu obciążonej powierz-
chni są różne, z wyraźną koncentracją naprężeń w przypadku obciążenia
o charakterze skupionym. Jednak w odległości zbliżonej do 1,5 d,
wszystkie rozkłady, niezależnie od sposobu obciążenia, stają się równomierne.
Rysunek 4.3
Na podstawie podobnych doświadczeń de Saint-Venant sformułował
następującą zasadę (1855r). Jeżeli na niewielki obszar ciała działają kolejno rozmaicie rozmieszczone lecz statycznie równoważne obciąże-
nia, to w odległości wyraźnie większej od wymiarów liniowych tego
obszaru powstają jednakowe stany naprężenia i odkształcenia.

ROZCIĄGANIE I ŚCISKANIE PRĘTA PROSTEGO O STAŁYM PRZEKROJU
Strona 27272727
4.2. Zasada superpozycji
W układach sprężystych przy wyznaczaniu sił wewnętrznych, naprężeń, odkształceń lub przemieszczeń można zastosować zasadę superpozycji
sił, ponieważ wszystkie zależności są liniowymi funkcjami obciążenia.
Zasada superpozycji sił polega na kolejnym rozpatrywaniu skutków
działania każdej z sił osobno i sumowaniu tych skutków.
Zastosowanie zasady superpozycji do wyznaczenia sił wewnętrznych w
pręcie o stałym przekroju A, obciążonym wzdłużnie siłami P i Q przed-
stawiono na rysunek 4.4.
Rysunek 4.4
W dowolnym przekroju dla 0 ≤ x ≤ l1 mamy
siłę wzdłużną QPxNxNxN +=+= )('')(')( oraz naprężenie
A
QP +=+= ''' σσσ
Podobnie w przekrojach z kolejnego odcinka pręta l1 ≤ x ≤ l1 +l2
siła wzdłużna wynosi QxNxNxN =+= )('')(')( oraz naprężenie
A
Q=+= ''' σσσ

ROZDZIAŁ 4
Strona 28282828
4.3. Określenie podstawowych właściwości mechanicznych materiału – statyczna próba rozciągania
Statyczna próba rozciągania jest jedną z podstawowych prób stosowa-
nych do określenia właściwości wytrzymałościowych i plastycznych ma-
teriałów konstrukcyjnych. Próba ta polega na osiowym rozciąganiu
próbek o ściśle określonym kształcie na maszynie wytrzymałościowej
zwanej zrywarką. Próbki przeznaczone do badań mają część pomiarową o określonej długości i stałym przekroju, a zakończone są obustronnie
główkami o zwiększonym przekroju, które służą do mocowania w uch-
wytach maszyny. Wynikiem próby rozciągania jest przebieg siły roz-
ciągającej F lub naprężeń σ, odpowiednio w funkcji wydłużenia ∆l lub
odkształcenia ε w zakresie sprężystym i sprężysto-plastycznym aż do
zerwania.
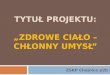
Przykład wykresu rozciągania σ(ε) z wyraźną granicą plastyczności,
charakterystyczny dla stali niskowęglowej (zawartość węgla 0,15 –
0,25%) przedstawiono na rysunku 4.5. Na osi pionowej odkładane są naprężenia nominalne odniesione do początkowego przekroju części po-
miarowej, 0SFn =σ , na osi poziomej – odkształcenia mierzone
względem długości początkowej próbki, 0ll∆=ε .
W początkowej fazie obciążenia do punktu A naprężenia rosną proporcjonalnie do odkształceń zgodnie z prawem Hooke’a. Punkt A
odpowiada granicy proporcjonalności RH. Na odcinku AA’ przestaje
obowiązywać prawo Hooke’a, jednak odkształcenia pozostają sprężyste.
Punkt A’, który w praktyce jest dość trudny do wyznaczenia, odpowiada
granicy sprężystości Rsp. Po przekroczeniu punktu B w materiale poja-
wiają się wyraźne odkształcenia plastyczne i na odcinku BB’ następuje
kumulacja mikropoślizgów, a w konsekwencji obserwujemy zjawisko
płynięcia materiału tzn. przyrostu długości próbki przy stałym obciąże-
niu. Punktowi B odpowiada granica plastyczności Re. W wielu przypad-
kach po osiągnięciu stanu płynięcia wartość siły rozciągającej ulega
niewielkim wahaniom. Wprowadzane jest pojęcie górnej ReH i dolnej ReL
granicy plastyczności. Na odcinku B’C proces tworzenia się poślizgów

ROZCIĄGANIE I ŚCISKANIE PRĘTA PROSTEGO O STAŁYM PRZEKROJU
Strona 29292929
ulega zahamowaniu. Zjawisko to nazywa się umocnieniem materiału.
Punkt C odpowiada doraźnej wytrzymałości na rozciąganie Rm. Po osiąg-
nięciu maksymalnego naprężenia nominalnego wydłużenie ε przestaje
być równomierne na długości pomiarowej próbki i obserwowana jest
koncentracja odkształceń w jednym obszarze. Powstaje przewężenie
zwane szyjką. Przekrój szyjki zmniejsza się i do dalszego rozciągania
wymagana jest coraz mniejsza siła. Na wykresie naprężeń nominalnych
(odniesionych do przekroju wyjściowego) następuje zagięcie do dołu aż do zerwania próbki – punkt D. Rzeczywiste naprężenie rozrywające
oznaczane Ru odniesione jest do przekroju próbki w miejscu przewężenia
po zerwaniu Su.
Rysunek 4.5
Własności plastyczne materiału określane są przy pomocy wskaźników
podawanych w procentach:
trwałe wydłużenie względne
%1000
0
l
llA u
p
−= , (4.13)
trwałe przewężenie względne
%1000
0
S
SSZ u−
= (4.14)

ROZDZIAŁ 4
Strona 30303030
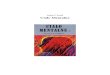
W powyższych wzorach indeks u wskazuje wymiar próbki po zerwaniu.
Dla większości metali i ich stopów wykres rozciągania przebiega bez
wyraźnej granicy plastyczności (rysunek 4.6). W przypadku takich ma-
teriałów wyznacza się tzw. umowną granicę plastyczności. Granica ta –
oznaczana symbolem R0,2 – odpowiada naprężeniu, przy którym po
odciążeniu pozostaje trwałe odkształcenie εtrw = 0,2%. Granicę R0,2
wyznacza się prowadząc prostą równoległą do odcinka OA wykresu aż do przecięcia z linią wykresu w punkcie B.
Rysunek 4.6
Podobne zależności σ(ε) uzyskuje się w przypadku próbek ściskanych.
Większość metali i ich stopów wykazuje zbliżone zachowanie przy ścis-
kaniu i rozciąganiu. Oznacza to, że podstawowe parametry materiałowe,
takie jak granica proporcjonalności, sprężystości i plastyczności, mają te
same wartości w próbie ściskania i rozciągania (materiał izonomiczny).
Na rysunku 4.7 pokazany jest przykładowy wykres uzyskany dla stali
niskowęglowej. Przy ściskaniu po przekroczeniu granicy plastyczności
następuje spęcznienie próbki i obserwuje się wyraźny wzrost siły po-
trzebnej do dalszego odkształcenia próbki.

ROZCIĄGANIE I ŚCISKANIE PRĘTA PROSTEGO O STAŁYM PRZEKROJU
Strona 31313131
Rysunek 4.7
Próba rozciągania i ściskania w przypadku materiałów kruchych
przebiega bez wyraźnej granicy proporcjonalności i granicy plas-
tyczności. Wykres zależności σ(ε) jest linią krzywą kończącą się w
punkcie odpowiadającym nagłemu zniszczeniem próbki. Materiały
kruche znoszą znacznie lepiej ściskanie niż rozciąganie. Na rysun-
ku 4.8 znajduje się uproszczony wykres otrzymany dla próbki
z żeliwa. Naprężenia niszczące przy ściskaniu są tu 3 ÷ 4 razy
wiesze od analogicznych przy rozciąganiu.

ROZDZIAŁ 4
Strona 32323232
Rysunek 4.8
4.4. Obliczenia wytrzymałościowe prętów na rozciąganie i ściskanie
W statycznej próbie rozciągania lub ściskania wyznaczane są naprężenia
niebezpieczne, za które w zależności od warunków przyjmuje się naprężenia odpowiadające granicy plastyczności Re lub doraźnej wytrzy-
małości Rm. Maksymalne, dopuszczalne ze względów technicznych
naprężenie powinno mieć wartość mniejszą od naprężenia uznanego za
niebezpieczne ( menieb RR , =σ ). Oznacza to, że naprężenie dopuszczalne
σdop jest pewnym ułamkiem naprężenia niebezpiecznego
n
niebdop
σσ = (4.15)
gdzie: n > 1 oznacza współczynnik bezpieczeństwa.

ROZCIĄGANIE I ŚCISKANIE PRĘTA PROSTEGO O STAŁYM PRZEKROJU
Strona 33333333
Współczynnik bezpieczeństwa powinien uwzględniać prawdopodobień-stwo niekorzystnych zmian warunków przyjętych w obliczeniach. Właś-ciwy dobór współczynnika bezpieczeństwa jest ważnym zagadnieniem
w projektowaniu maszyn i wymaga możliwie pełnej znajomości czynni-
ków decydujących o wytrzymałości i trwałości konstrukcji.
W przypadku rozciągania lub ściskania naprężenia dopuszczalne dopσ
oznaczamy odpowiednio kr lub kc.
Obliczenia wytrzymałościowe pręta rozciąganego lub ściskanego
polegają na porównaniu naprężeń rzeczywistych z naprężeniami
dopuszczalnymi
cr kkA
N lub ≤=σ (4.16)
gdzie: N – siła wzdłużna, A – pole przekroju pręta.
4.5. Uwagi o spiętrzeniu naprężeń
Rozkład naprężeń normalnych w prętach o zmiennych przekrojach
znacznie różni się od przyjmowanego w obliczeniach rozkładu równo-
miernego. Wyraźny wzrost naprężeń występuje w obszarach, w których
zmienia się kształt przekroju. Na przykład w płaskiej próbce w sąsiedz-
twie wywierconego otworu obserwujemy znaczny wzrost naprężeń
w stosunku do naprężeń nominalnych APn =σ , tzw. spiętrzenie
naprężeń (rysunek 4.9).
Szczególnie duże spiętrzenie naprężeń ma miejsce w miejscu ostrych
nacięć. Jest to tzw. działanie karbu (rysunek 4.10).
W przypadku materiałów kruchych spiętrzenie lokalne powoduje poja-
wienie się pęknięć, które są źródłem nowych spiętrzeń naprężeń i pęk-
nięć, a w konsekwencji zniszczenia spójności materiału. Materiały
o właściwościach plastycznych poprzez lokalne trwałe odkształcenia
i wyrównanie poziomu naprężeń łagodzą działanie karbu.

ROZDZIAŁ 4
Strona 34343434
Rysunek 4.9
Rysunek 4.10
W celu obniżenia poziomu spiętrzenia naprężeń należy stosować łagodne
przejścia w obszarach zmian geometrii elementu, a także uwzględniać możliwość wystąpienia lokalnego wzrostu naprężeń przy ustalaniu
wartości współczynnika bezpieczeństwa.

ROZCIĄGANIE I ŚCISKANIE PRĘTA PROSTEGO O STAŁYM PRZEKROJU
Strona 35353535
4.6. Statycznie niewyznaczalne układy prętowe
Układami statycznie niewyznaczalnymi nazywamy układy, w których
liczba niewiadomych reakcji jest większa od liczby równań równowagi.
Uzupełniające równania otrzymujemy rozpatrując odkształcenia sprężys-
te elementów układu. Równania te noszą nazwę równań przemieszczeń
lub warunków geometrycznych.
Sposoby rozwiązywania zagadnień statycznie niewyznaczalnych ukła-
dów prętowych przedstawione są na wybranych przykładach.
Przesztywnienie układu
Sztywna belka AB zamocowana przegubowo w punkcie A jest zawie-
szona na dwóch sprężystych prętach wykonanych z tego samego mater-
iału. Swobodny koniec belki jest obciążony siłą P. Wyznaczyć siły
wzdłużne w prętach, jeśli ich długość wynosi l, a przekroje odpowiednio
A1 i A2.(rysunek 4.11)
Rysunek 4.11

ROZDZIAŁ 4
Strona 36363636
Rozwiązanie
1. Równania równowagi
021 =−++ PNNRA
032 21 =−+ PaaNaN
2. Warunki geometryczne
aa 2
21 λλ= stąd 12 2λλ =
3. Zależności fizyczne
1
11
EA
lN=λ ,
2
22
EA
lN=λ
Po podstawieniu zależności fizycznych do warunków geometrycznych
otrzymujemy równanie uzupełniające
NA
AN
1
22 2=
Rozwiązując układ równań równowagi wraz z równaniem uzupełnia-
jącym wyznaczamy
siły w prętach PAA
AN
21
1
14
3
+= , P
AA
AN
21
22
4
6
+=
oraz reakcję podpory PAA
AARA
21
21
42
+
+−=
(znak „–” oznacza przeciwny zwrot reakcji).
Naprężenia montażowe
Pręt o zmiennej skokowo średnicy wykonany z jednego materiału należy
zamontować w sztywnej obudowie. Pręt został wykonany o wymiar δ za
długi w stosunku do rozstawu ścian. Wyznaczyć reakcje ścian obudowy

ROZCIĄGANIE I ŚCISKANIE PRĘTA PROSTEGO O STAŁYM PRZEKROJU
Strona 37373737
po montażu. Zbudować wykresy sił normalnych N, naprężeń σ i prze-
mieszczeń u dowolnego przekroju (rysunek 4.12).
Rysunek 4.12
Rozwiązanie
1. Równanie równowagi
RRR == 21
2. Warunki geometryczne
δλλ =+ 21
3. Zależności fizyczne
1
1EA
Rl=λ ,
2
2EA
Rl=λ

ROZDZIAŁ 4
Strona 38383838
Jeśli jest d1 = 2d2, to A1 = 4A2 oraz 2
12EA
Rl=λ
Po podstawieniu zależności fizycznych do warunków geometrycznych
otrzymujemy równanie
δ=+212 EA
Rl
EA
Rl
z którego wyznaczamy reakcję ścian R w funkcji parametru niedokład-
ności wykonania δ
δl
EAR 2
3
2=
Naprężenia termiczne
Jeżeli element konstrukcji wykonany z materiału izotropowego zostanie
równomiernie podgrzany lub ochłodzony to odkształcenia we wszystkich
kierunkach będą wynosić
T∆= αε (4.17)
gdzie: α - współczynnik rozszerzalności liniowej.
Współczynnik rozszerzalności liniowej zależy od rodzaju materiału i w
rozpatrywanym w praktyce zakresie temperatur ma wartość stałą.
Weźmy pod uwagę przykład, w którym pręt złożony z odcinka stalowe-
go o sztywności Es As i odcinka miedzianego o sztywności Em Am został
wstawiony między dwie sztywne ściany i podgrzany o ∆T (rysu-
nek 4.13). Przyjmując współczynniki rozszerzalności liniowej stali
i miedzi, odpowiednio αs i αm, należy wyznaczyć wartość reakcji ścian.
Rozwiązanie
1. Równanie równowagi
RRR == 21
2. Warunek geometryczny

ROZCIĄGANIE I ŚCISKANIE PRĘTA PROSTEGO O STAŁYM PRZEKROJU
Strona 39393939
- równość swobodnego wydłużenia termicznego i skrócenia wywołanego
reakcją ścian
λλ =T
przy czym
T
m
T
s
T λλλ += oraz ms λλλ +=
Rysunek 4.13
3. Zależności fizyczne
lTs
T
s ∆= αλ , Tm
T
m ∆= αλ
ss
sAE
lR=λ ,
mm
mAE
Rl=λ
Po podstawieniu zależności fizycznych do warunków geometrycznych
otrzymujemy równanie
( )mmss
msAE
Rl
AE
RlTl +=∆+αα
z którego wyznaczamy reakcję ścian R

ROZDZIAŁ 4
Strona 40404040
( )
TAEAE
AAEER
mmss
msmsms ∆+
+=
αα

`
5 Momenty bezwładności figur płaskich

ROZDZIAŁ 5
Strona 42424242
Moment bezwładności względem bieguna (biegunowy moment bezwład-
ności) (rysunek 5.1)
Rysunek 5.1
∫=A
def
dAJ 2
0 ρ (5.1)
ρ - odległość elementu powierzchni od bieguna.
Moment bezwładności względem prostej (osi) (rysunek 5.2)
Rysunek 5.2
∫=A
def
l dArJ2
(5.2)
r - odległość elementu powierzchni od prostej
Moment bezwładności względem prostej jest równy iloczynowi pola
figury A i kwadratu tzw. promienia bezwładności i
2iAJ l = (5.3)
Wyznaczmy momenty bezwładności figury płaskiej w układzie osi pro-
stokątnych (rysunek 5.3).

MOMENTY BEZWŁADNOŚCI FIGUR PŁASKICH
Strona 43434343
Rysunek 5.3
Momenty bezwładności figury względem osi x i osi y zgodnie z definicją (5.2) wynoszą
∫=A
x dAyJ 2 (5.4)
∫=A
y dAxJ 2 (5.5)
Moment bezwładności względem początku układu współrzędnych jest
określony zależnością
( ) y
A
x
A
JJdAyxdAJ +=+== ∫∫222
0 ρ (5.6)
Biegunowy moment bezwładności figury płaskiej względem początku
układu współrzędnych prostokątnych równa się sumie momentów bez-
władności względem osi układu.
W prostokątnym układzie współrzędnych wprowadza się pojęcie mo-
mentu względem układu osi nazywanego momentem odśrodkowym lub
momentem dewiacji, który zdefiniowany jest wzorem
∫=A
def
xy dAyxJ (5.7)

ROZDZIAŁ 5
Strona 44444444
5.1. Momenty bezwładności względem osi przesuniętych
Niech osie ξ i η będą przesunięte odpowiednio o b i a względem osi x
i y. Spełniony jest następujący związek między współrzędnymi obu
układów (rysunek 5.4)
Rysunek 5.4
ax −=ξ , by −=η (5.8)
Moment bezwładności figury względem osi ξ wyznaczamy ze wzoru
AbdAybdAydAbydAJAA AA
2222 2)( +−=−== ∫∫ ∫∫ηξ (5.9)
W podobny sposób wyznaczamy pozostałe momenty bezwładności Jη
i Jξη. Ostatecznie otrzymujemy następujące wzory
AbdAybJJA
x
22 ∫ +−=ξ (5.10)
AadAxaJJA
y
22 ∫ +−=η (5.11)
bAadAyadAxbJJAA
xy ∫∫ +−−=ξη (5.12)

MOMENTY BEZWŁADNOŚCI FIGUR PŁASKICH
Strona 45454545
gdzie całki x
A
SdAy =∫ oraz y
A
SdAx =∫ oznaczają momenty statyczne
figury, odpowiednio względem osi x i osi y.
Jeżeli początek układu 0, x, y znajduje się w środku ciężkości figury
wówczas momenty statyczne Sx i Sy są równe zeru i wzory (5.10 – 5.12)
redukują się do postaci
2bAJJ x +=ξ (5.13)
2aAJJ y +=η (5.14)
abAJJ xy +=ξη (5.15)
Powyższe wzory stanowią matematyczny zapis twierdzenia Steinera.
Moment bezwładności figury płaskiej względem osi l równa się momen-
towi bezwładności względem osi równoległej przechodzącej przez śro-
dek ciężkości figury zwiększonemu o iloczyn powierzchni figury przez
kwadrat odległości między osiami.
Moment odśrodkowy figury płaskiej względem układu osi prostokątnych
równa się momentowi odśrodkowemu względem układu osi równoleg-
łych przechodzących przez środek ciężkości figury zwiększonemu o ilo-
czyn powierzchni figury przez odległości między osiami obu układów.
5.2. Momenty bezwładności względem osi obróconych
Rozważmy układ o osiach ξ, η obrócony o dowolny kąt ϕ względem
układu 0, x, y (rysunek 5.5). Związek między współrzędnymi obu ukła-
dów ma postać
ϕϕξ sincos yx += , ϕϕη sincos xy −= (5.16)
Na podstawie definicji momentów bezwładności, wykorzystując zależ-ności (5.16), po przekształceniach wyznaczamy momenty bezwładności
w układzie obróconym

ROZDZIAŁ 5
Strona 46464646
ϕϕϕηξ 2sinsincos 222
xyyx
A
JJJdAJ −+== ∫ (5.17)
ϕϕϕξη 2sincossin 222
xyyx
A
JJJdAJ ++== ∫ (5.18)
ϕϕξηξη 2cos2sin2
xy
yx
A
JJJ
dAJ +−
== ∫ (5.19)
Rysunek 5.5
Podstawiając zależności trygonometryczne
2
2cos1sin 2 ϕ
ϕ−
=, 2
2cos1cos2 ϕ
ϕ+
=
otrzymujemy inną postać wzorów (5.17 – 5.19)
ϕϕξ 2sin2cos
22xy
yxyxJ
JJJJJ −
−+
+=
(5.20)
ϕϕη 2sin2cos
22xy
yxyxJ
JJJJJ +
−−
+=
(5.21)
ϕϕξη 2cos2sin2
xy
yxJ
JJJ +
−= (5.22)
Wyznaczmy kąt obrotu ϕ0 prostokątnego układu osi, któremu odpowiada
zerowa wartość momentu odśrodkowego Jξη = 0

MOMENTY BEZWŁADNOŚCI FIGUR PŁASKICH
Strona 47474747
02cos2sin
200 =+
−= ϕϕξη xy
yxJ
JJJ (5.23)
stąd
yx
xy
JJ
Jtg
−−=
22 0ϕ (5.24)
Rozwiązaniem równania trygonometrycznego (46) są dwa wzajemnie
prostopadłe kierunki
210
πϕϕ n+= (n = 1, 2, 3...) (5.25)
Wynika stąd, że w dowolnym punkcie figury płaskiej można wyznaczyć dwie wzajemnie prostopadłe osie, względem których moment odśrodko-
wy jest równy zeru. Osie te nazywamy głównymi osiami bezwładności
figury.
Główne osie bezwładności przechodzące przez środek geometryczny
figury nazywamy głównymi centralnymi osiami bezwładności, a mo-
menty względem tych osi – głównymi centralnymi momentami bezwład-
ności. Można wykazać, że główne centralne momenty bezwładności
mają ekstremalne wartości określone wzorem
( ) 22
2,1 4)(2
1
2
1xyyxyx JJJJJJ +−±+= (5.26)

ROZDZIAŁ 5
Strona 48484848

`
6 Skręcanie prętów o przekrojach kołowych

ROZDZIAŁ 6
Strona 50505050
Skręcanie ma miejsce, gdy pręt jest obciążony parami sił w różnych
płaszczyznach prostopadłych do jego osi. Jeżeli nie występują ogranicze-
nia w swobodnej deplanacji (wypaczeniu) przekrojów poprzecznych
pręta spowodowane sposobem przyłożenia obciążenia, zmianą przekroju
poprzecznego lub warunkami podparcia, mówimy o skręcaniu
swobodnym.
W skręcaniu siły wewnętrzne redukują się do momentu skręcającego Ms.
Rozważmy pręt utwierdzony jednym końcem, a na drugim obciążony
momentem M. Niech na powierzchni walcowej pręta naniesiona zostanie
siatka linii tworzących i kół odpowiadających przekrojom poprzecznym.
Można zaobserwować, że w wyniku skręcania następują wzajemne
obroty nie deformujących się przekrojów oraz przejście tworzących
w linie śrubowe (rysunek 6.1).
Rysunek 6.1
Podstawą teorii swobodnego skręcania prętów o przekroju kołowym lub
pierścieniowym są następujące założenia:
a. przekroje po skręceniu pręta pozostają płaskie i normalne do
jego osi (hipoteza płaskich przekrojów),

SKRĘCANIE PRĘTÓW O PRZEKROJACH KOŁOWYCH
Strona 51515151
b. promienie naniesione na powierzchnię przekroju pozostają pro-
ste (kształt przekroju nie zmienia się),
c. wzajemna odległość dowolnych przekrojów nie ulega zmianie,
a zatem w przekrojach skręcanych prętów występują tylko naprę-żenia styczne.
Warunki geometryczne
W celu sformułowania warunków geometrycznych rozważmy element
dx pręta po odkształceniu (rysunek 6.2).
Rysunek 6.2
Przekroje odległe o dx obracają się względem siebie o kąt dϕ. Obrotowi
przekrojów odpowiada kąt odkształcenia postaciowego γ, którego war-
tość na obwodzie wynosi γr. Na podstawie zależności geometrycznych
mamy
ϕγ drdxCC r ==' (6.1)
stąd
rdx
dr
ϕγ = (6.2)
Na współśrodkowej powierzchni walcowej w dowolnej odległości ρ
prawdziwa jest zależność

ROZDZIAŁ 6
Strona 52525252
ϕργ ddxDD ==' (6.3)
oraz ogólny wzór na kąt odkształcenia postaciowego
ρϕ
γdx
d= (6.4)
gdzie: dx
dϕ oznacza jednostkowy kąt skręcenia.
Zależności fizyczne
Zależności fizyczne określa prawo Hooke’a dla ścinania, zgodnie z któ-
rym odkształcenie postaciowe jest proporcjonalne do naprężenia, które je
spowodowało
G
τγ = (6.5)
gdzie: G – moduł Kirchhoffa, moduł sprężystości postaciowej, który
np. dla stali wynosi G = 8·1010
Pa.
Naprężenia styczne wyznaczamy porównując wzory (6.4) i (6.5)
dx
dG
ϕρτ = (6.6)
Jednostkowy kąt skręcenia dla dowolnego przekroju jest stały, a zatem
wartość naprężeń stycznych jest proporcjonalna do odległości od środka
przekroju. Naprężenia styczne w przekroju skręcanego pręta charaktery-
zuje rozkład liniowy, przy czym kierunek wektorów naprężeń jest pro-
stopadły do promienia przekroju (rysunek 6.3).
Rysunek 6.3

SKRĘCANIE PRĘTÓW O PRZEKROJACH KOŁOWYCH
Strona 53535353
Warunek równowagi
Równanie momentów względem osi pręta ma postać
0=−∫ s
A
MdAρτ (6.7)
po podstawieniu wyrażenia (6.6) na naprężenia styczne otrzymujemy
równanie
02 =−∫ s
A
MdAdx
dG ρ
ϕ (6.8)
w którym 0
2 JdAA
=∫ρ oznacza biegu biegunowy moment bezwładności
przekroju.
Z równania równowagi (6.6) wyznaczamy jednostkowy kąt skręcenia
0GJ
M
dx
d s=ϕ
(6.9)
Kąt skręcenia skrajnych przekrojów pręta wyznaczamy całkując
wyrażenie (6.9) na długości pręta l
00 0 GJ
lMdx
GJ
M s
l
s == ∫ϕ (6.10)
Kąt skręcenia pręta mierzony w stopniach dany jest wzorem
0
180
GJ
lM so
πϕ = (6.11)
Obliczanie kąta skręcenia związane jest z zapewnieniem dostatecznej
sztywności elementów. Wprowadzając tzw. dopuszczalny kąt skręcenia
ϕdop, warunek sztywności skręcanego pręta można zapisać w postaci
dop
s
GJ
lMϕϕ ≤=
0
(6.12)

ROZDZIAŁ 6
Strona 54545454
6.1. Obliczenia wytrzymałościowe na skręcanie
W celu wyznaczenia naprężeń stycznych w funkcji obciążenia, do wyra-
żenia (6.6) na naprężenia styczne podstawiamy zależność (6.9) określa-
jącą jednostkowy kąt skręcenia, otrzymujemy
ρτ0J
M s= (6.13)
Wzór ten umożliwia wyznaczenie naprężeń stycznych w dowolnym
punkcie przekroju.
Zgodnie z rozkładem naprężeń, maksymalne naprężenia styczne
występuje na konturze przekroju (ρ = r)
00
maxW
Mr
J
M ss ==τ (6.14)
gdzie: W0 – wskaźnik wytrzymałości na skręcanie
r
JW 0
0 = (6.15)
Warunek wytrzymałości skręcanego pręta ma postać
tdop
s kW
M=≤= ττ
0
max (6.16)
gdzie: kt – dopuszczalne naprężenie styczne.
Biegunowe momenty bezładności i wskaźniki wytrzymałości na skręca-
nie obliczamy ze wzorów:
a) przekrój kołowy
322
44
0
drJ
ππ== (6.17)

SKRĘCANIE PRĘTÓW O PRZEKROJACH KOŁOWYCH
Strona 55555555
162
33
0
drW
ππ== (6.18)
b) przekrój pierścieniowy
−=
4
44
0 132
z
wz
d
ddJ
π
(6.19)
−=
4
43
0 116
z
wz
d
ddW
π
(6.20)
gdzie: dz i dw oznaczają odpowiednio zewnętrzną i wewnętrzną średnicę przekroju.
6.2. Przykłady obliczeń
1. Wyznaczyć średnicę d przekroju pręta utwierdzonego na jednym
końcu i obciążonego momentami 4M i M działającymi odpowiednio
w przekrojach B i C (rysunek 6.4). Zbudować wykres momentów skrę-cających oraz wykres kąta skręcenia. Przyjąć, że dane są: długość l,
moment M, moduł Kirchhoffa G oraz naprężenie dopuszczalne τdop.
Rysunek 6.4

ROZDZIAŁ 6
Strona 56565656
Rozwiązanie
Równanie równowagi
04 =+− MMM A
stąd MM A 3=
Funkcja momentu skręcającego
lx ≤≤0
MM s 3−=
lxl 3≤≤ MMMM s =+−= 43
lxl 43 ≤≤ 043 =−+−= MMMM s
Kąty skręcenia poszczególnych odcinków pręta wynoszą:
0
3
GJ
lMAB
−=ϕ ,
0
2
GJ
lMBC =ϕ , 0=DCϕ
Całkowity kąt skręcenia jest sumą algebraiczną kątów skręcenia odcin-
ków pręta
0GJ
lMCDBCABAD
−=++= ϕϕϕϕ
W przypadku pręta o przekroju kołowym warunek wytrzymałościowy
ma postać
dop
ss
d
M
W
Mτ
πτ ≤==
3
max
0
max
max
16
stąd obliczamy średnicę d przekroju pręta
3max16
dop
sMd
πτ≥

SKRĘCANIE PRĘTÓW O PRZEKROJACH KOŁOWYCH
Strona 57575757
Ostatecznie, podstawiając największy co do bezwzględnej wartości
moment skręcający MM s 3max = otrzymujemy warunek poprawnie
dobieranej średnicy pręta
348
dop
Md
πτ≥ .
2. Wyznaczyć największe naprężenie w pręcie o średnicy d utwierdzo-
nym na obu końcach i obciążonym momentami M i 3M w sposób
pokazany na rysunek 6.5. Zbudować wykresy momentów skręcających
i kątów skręcenia. Przyjąć, że dane są: długość l, średnica d, moment M
oraz moduł Kirchhoffa G.
Rysunek 6.5
Rozwiązanie
Równanie równowagi
03 =+−+ DA MMMM
stąd 02 =+− DA MMM
W powyższym równaniu występują dwa nieznane momenty utwierdze-
nia MA i M
D, a zatem zadanie jest jednokrotnie statycznie niewyznaczal-

ROZDZIAŁ 6
Strona 58585858
ne. Dodatkowe równanie wyznaczamy biorąc pod uwagę przemieszcze-
nia pręta. Wiemy, że przekroje utwierdzone nie obracają się względem
siebie, mamy więc następujący warunek geometryczny
0=++= CDBCABAD ϕϕϕϕ
Zależności fizyczne określają kąty skręcenia poszczególnych odcinków
pręta
0GJ
lM A
AB =ϕ, 0
)(
GJ
lMM A
BC
+=ϕ
, 0
)3(
GJ
lMMM A
CD
−+=ϕ
Po podstawieniu zależności fizycznych do warunku geometrycznego
otrzymujemy dodatkowe równanie
03 =−++++ MMMMMM AAA ,
z którego wyznaczamy
MM A
3
1=
Z równania równowagi obliczamy moment MD
MM D
3
5=
Największa bezwzględna wartość momentu skręcającego wynosi
MM s
3
5max =
A zatem, największe naprężenie styczne występuje w na powierzchni
odcinka CD pręta i określone jest wzorem
3
0
maxmax
3
80
d
M
W
M s
πτ ==
.

`
7 Ścinanie pręta prostego

ROZDZIAŁ 7
Strona 60606060
Ścinanie ma miejsce, gdy jako siła wewnętrzna występuje tylko siła
poprzeczna. W praktyce realizacja czystego ścinania jest niemożliwa ze
względu na towarzyszący ścinaniu efekt zginania. Gdy działanie mo-
mentu gnącego jest małe w porównaniu z działaniem siły poprzecznej,
wprowadza się pojęcie ścinania technicznego.
Ograniczając siły wewnętrzne do siły poprzecznej, średnią wartość naprężenia stycznego τśr obliczana się jako iloraz siły T i powierzchni
przekroju A
A
Tśr =τ (7.1)
Jest to przybliżony sposób wyznaczania naprężeń w niektórych
elementach maszyn np. sworzniach, nitach itp. Warunek
wytrzymałościowy przyjmuje się w postaci
dopśrA
Tττ ≤= (7.2)
Przykładem obliczeń na ścinanie może być tzw. zakładkowe połączenie
nitowane dwóch blach rozciąganych siłą P (rysunek 7.1)
Rysunek 7.1
Przy założeniu równomiernego obciążenia wszystkich nitów, pojedynczy
nit ścinany jest siłą

ŚCINANIE PRĘTA PROSTEGO
Strona 61616161
n
PT = (7.3)
gdzie: n oznacza liczbę nitów.
Na rysunku 7.2 pokazane jest oddziaływanie łączonych blach na trzon
nitu.
Rysunek 7.2
Warunek wytrzymałościowy ma postać
dopdn
P
nA
Pτ
πτ ≤==
2
4 (7.4)
gdzie d oznacza średnicę nitu.
Po przekształceniu warunek ten może służyć do wyznaczenia i doboru
średnicy nitów w rozważanym połączeniu nakładkowym
dopn
Pd
τπ
4≥ (7.5)

ROZDZIAŁ 7
Strona 62626262

`
8 Zginanie prętów

ROZDZIAŁ 8
Strona 64646464
Rozważmy pręt, którego oś jest krzywą płaską, a obciążenie w postaci sił
P1,..., Pn działa w płaszczyźnie osi pręta. Przecinamy pręt przekrojem
poprzecznym na dwie części I i II (rysunek 8.1).
Rysunek 8.1
W wyniku redukcji sił zewnętrznych działających na część I do środka
przekroju wyznaczamy składowe sił wewnętrznych:
N1 – siła podłużna (normalna),
T1 – siła poprzeczna (tnąca),
Mg1 – moment gnący.
Siły te są oddziaływaniem części I w miejscu przekroju na część II.
Przeprowadzając analogiczne rozumowanie w stosunku do części II
pręta, otrzymujemy przeciwne wektory sił N2, T2 i momentu gnącego
Mg2, którymi część II działa na część I.
Przyjmujemy następujące określenia sił wewnętrznych.

ZGINANIE PRĘTÓW
Strona 65656565
Siła podłużna lub poprzeczna w dowolnym przekroju jest równa sumie
odpowiednich składowych obciążenia działających na część pręta
oddzieloną tym przekrojem.
Moment gnący w dowolnym przekroju jest równy sumie momentów
względem środka przekroju wszystkich sił działających na część pręta
oddzieloną tym przekrojem.
8.1. Siły poprzeczne i momenty gnące w belkach
Belki są to pręty proste obciążone siłami prostopadłymi do osi.
Wyznaczmy siły wewnętrzne w belce opartej na podporach przegubo-
wych i obciążonej siłą P (rysunek 8.2).
Rysunek 8.2
Reakcje podpór obliczamy z równań równowagi
0=−+ PRR BA
0)( =+− baRPa B
po przekształceniach mamy
ba
PbRA
+= ,
ba
PaRB
+=
Siłę poprzeczną i moment gnący wyznaczamy z warunku równowagi
odciętej myślowo części belki (rysunek 8.3)

ROZDZIAŁ 8
Strona 66666666
Rysunek 8.3
ax ≤≤0
ba
PbRT A
+==1
x
ba
PbxRM Ag
+==1
baxa +≤≤
BA RP
ba
PbPRT −=−
+=−=2
)()(
)(2
xbaRaxPxba
Pb
axPxRM
B
Ag
−+=−−+
=
=−−=
Przyjmujemy umowę dotyczącą znaku siły poprzecznej T i momentu
gnącego Mg.

ZGINANIE PRĘTÓW
Strona 67676767
Siła poprzeczna spowodowana siłami działającymi po lewej stronie
przekroju do góry, a po prawej do dołu ma znak dodatni, w przeciwnym
przypadku ma znak ujemny.
Moment gnący spowodowany siłami działającymi do góry jest dodatni,
a działającymi do dołu ujemny.
Siły wewnętrzne w belkach obciążonych w sposób ciągły
Weźmy pod uwagę belkę swobodnie podpartą, której część obciążona
jest obciążeniem o natężeniu q(ξ), zmieniającym się wzdłuż osi
(rysunek 8.4).
Rysunek 8.4
Całkowite obciążenie belki wynosi
∫−
=al
dqQ0
)( ξξ
Siły wewnętrzne w poszczególnych przedziałach określone są wzorami
ax ≤≤0 ART =1 , xRM Ag =1

ROZDZIAŁ 8
Strona 68686868
lxa ≤≤ ∫−
−=ax
A dqRT0
2 )( ξξ ,
ξξξ daxqxRM
ax
Ag )()(0
2 −−−= ∫−
Oznaczmy wypadkową obciążenia ciągłego po lewej stronie przekroju
przez
∫−
=ax
x dqQ0
)( ξξ
oraz odległość wypadkowej od rozpatrywanego przekroju przez
∫
∫−
−
−−
=ax
ax
x
dq
daxq
s
0
0
)(
)()(
ξξ
ξξξ
Wówczas siły wewnętrzne w przedziale lxa ≤≤ możemy zapisać w
prostej formie
xA QRT −=2
xxAg sQxRM −=2
Jeśli obciążenie jest rozłożone równomiernie na odcinku belki, q =
constans, na podstawie podanych wzorów otrzymujemy
)( axqQx −=
2
)( axqsx
−=

ZGINANIE PRĘTÓW
Strona 69696969
8.2. Zależności różniczkowe między obciążeniem i siłami wewnętrznym
Weźmy pod uwagę element belki o długości dx (rysunek 8.5). Na belkę działa poprzeczne obciążenie ciągłe o intensywności q. Zakładamy, że
funkcje opisujące siły wewnętrzne T i Mg są różniczkowalne względem
współrzędnej x.
Rysunek 8.5
Zapiszmy warunki równowagi elementu belki.
Suma rzutów na kierunek prostopadły do osi belki wynosi
0=+−+ qdxTdTT (8.1)
Suma momentów względem punktu O znajdującego się w środku ele-
mentu dx dana jest równaniem
02
=−−−+dx
dTTdxMdMM ggg (8.2)
Odrzucając w równaniach równowagi małe wyższego rzędu, otrzymuje-
my następujące zależności różniczkowe
qdx
dT−= (8.3)

ROZDZIAŁ 8
Strona 70707070
Tdx
dM g= (8.4)
Różniczkując obie strony równania (8.4) mamy
qdx
Md g−=
2
2
(8.5)
Zależności (8.3 – 8.5) można zapisać w formie wniosków:
a. pochodna siły poprzecznej względem współrzędnej mierzonej
wzdłuż osi belki jest równa intensywności obciążenia ciągłego
(ze znakiem ujemnym),
b. pochodna momentu gnącego względem współrzędnej mierzonej
wzdłuż osi belki jest równa sile poprzecznej,
c. druga pochodna momentu gnącego względem współrzędnej
mierzonej wzdłuż osi belki jest równa intensywności obciążenia
ciągłego (ze znakiem ujemnym).
Wyprowadzone zależności różniczkowe wykorzystuje się do skontrolo-
wania poprawności wyznaczanych wykresów T(x) i Mg(x).
Wskazówki:
• Jeśli jest q = 0 to wykresem T(x) jest prosta równoległa do
osi pręta, Mg(x) jest prostą nachyloną do osi.
• Moment gnący Mg(x) ma ekstremum w miejscu zerowania
się siły poprzecznej T.
• W miejscu działania siły skupionej lub momentu skupionego
na wykresie T(x) lub Mg(x) występuje nieciągłość w postaci
skoku odpowiednio o wartość siły skupionej lub momentu
skupionego.

ZGINANIE PRĘTÓW
Strona 71717171
8.3. Równomierne zginanie belki – naprężenia i odkształcenia
Zbadajmy naprężenia i odkształcenia w belce równomiernie zginanej.
Taki rodzaj zginania występuje, gdy moment gnący wywołany obciąże-
niem jest stały wzdłuż osi belki, const.)( =xM g Z zależności różnicz-
kowej (8.4), wiążącej siłę poprzeczną z momentem gnącym, wynika, że
w zginaniu równomiernym siła poprzeczna jest równa zeru, 0)( =xT .
A zatem, zginanie równomierne jest zginaniem czystym, w którym jedy-
ną siłą wewnętrzną jest moment gnący.
Rozważmy zginanie równomierne belki o przekroju prostokątnym z na-
niesioną na bokach siatką linii podłużnych i poprzecznych (rysunek 8.6).
Rysunek 8.6
Po odkształceniu linie podłużne oraz oś belki zakrzywiają się, linie pro-
stopadłe pozostają proste i prostopadłe do osi belki, a kontur przekroju
pozostaje płaski. Przyjmując strukturę materiału złożoną z włókien rów-
noległych do osi belki, można stwierdzić, że włókna po stronie wklęsłej
skróciły się, a po stronie wypukłej uległy wydłużeniu. Oznacza to, że w
belce istnieje warstwa utworzona z włókien o niezmienionej długości.
Jest to tzw. warstwa obojętna, której przecięcie z przekrojem poprzecz-
nym wyznacza oś obojętną.

ROZDZIAŁ 8
Strona 72727272
Na podstawie doświadczeń można przyjąć mechanizm zginania oparty
na następujących założeniach:
a. przekrój płaski pozostaje po odkształceniu płaski i prostopadły
do osi belki,
b. istnieje warstwa obojętna prostopadła do płaszczyzny działania
momentu gnącego,
c. w przekroju poprzecznym występują wyłącznie naprężenia
normalne, a w przekrojach podłużnych nie ma żadnych naprężeń.
Odkształcenia elementu belki
Rozpatrzmy element belki o długości dx przed odkształceniem i po
odkształceniu (rysunek 8.7).
Rysunek 8.7

ZGINANIE PRĘTÓW
Strona 73737373
Weźmy pod uwagę włókno znajdujące się w odległości y od warstwy
obojętnej. Włókno, które przed odkształceniem miało długość dx = ds,
po odkształceniu wydłuża się o ε do długości ds (1 + ε).
Na podstawie zależności geometrycznych mamy
ρρ
ε
−=
+−
+ ds
y
ds )1( (8.6)
stąd
ρ
εy
−= (8.7)
gdzie: ρ jest promieniem krzywizny warstwy obojętnej, który w przyję-tym układzie współrzędnych i przy dodatnim momencie gnącym Mg ma
wartość ujemną.
Wzór (8.7) oznacza, że wydłużenie włókien jest proporcjonalne do ich
odległości od warstwy obojętnej i ze względu na znak promienia krzy-
wizny jest dodatnie dla dodatnich wartości współrzędnej y.
Warunki równowagi
Siły zewnętrzne działające na część belki oddzieloną przekrojem
redukują się do momentu gnącego Mg. W obszarze przekroju działają
elementarne siły σ dA (rysunek 8.8).
Rysunek 8.8

ROZDZIAŁ 8
Strona 74747474
Warunki równowagi odcinka belki mają postać
0=∑ xF 0=∫A
dAσ (8.8)
0=∑ yM 0=∫A
dAzσ (8.9)
0=∑ zM 0=+− ∫ g
A
MdAyσ (8.10)
Zależności fizyczne dla materiału sprężystego określone są prawem
Hooke’a, z którego po uwzględnieniu wzoru (8.7) wyznaczamy napręże-
nia normalne
yE
Eρ
εσ −== (8.11)
Związek (8.11) ustala rozkład naprężeń normalnych w przekroju pręta
zginanego. Zgodnie z nim wartość naprężeń jest proporcjonalna do
odległości punktu przekroju od osi obojętnej.
Po podstawieniu do warunków równowagi (8.8) – (8.10) funkcji rozkła-
du naprężeń (8.11) otrzymujemy kolejno
0=∫A
dAy (8.12)
0=∫A
dAzy (8.13)
g
A
MdAyE
−=∫2
ρ (8.14)
Równość (8.12) oznacza zerowanie się momentu statycznego Sz wzglę-dem osi obojętnej (oś z), a zatem oś obojętna przechodzi przez środek
ciężkości przekroju.
Zgodnie z równością (8.13) moment odśrodkowy Jyz względem układu
osi prostokątnych y, z ma wartość zerową. Osie y i z są głównymi osiami
bezwładności przekroju. Można zatem stwierdzić, że oś obojętna jest
główną centralną osią bezwładności.

ZGINANIE PRĘTÓW
Strona 75757575
W rozważanym przypadku kierunek wektora momentu gnącego pokrywa
się z kierunkiem osi obojętnej i ten rodzaj zginania nazywamy zgina-
niem prostym.
W równaniu (8.14) całka z
A
JdAy =∫2
oznacza moment bezwładności
względem osi obojętnej. Przekształcając równanie (8.14) otrzymujemy
związek między krzywizną a momentem gnącym
z
g
EJ
M−=
ρ
1 (8.15)
w którym iloczyn EJz oznacza sztywność na zginanie.
Podstawiając do wzoru (8.11) promień krzywizny ze wzoru (8.15) wy-
znaczamy zależność na naprężenia normalne w dowolnym punkcie
przekroju w funkcji obciążenia (momentu gnącego)
z
g
J
yM=σ (8.16)
Zgodnie z wcześniejszymi wnioskami naprężenia normalne charaktery-
zuje liniowy rozkład.
8.4. Obliczenia wytrzymałościowe na zginanie
Największe bezwzględne wartości naprężeń występują w punktach
przekroju najbardziej odległych od osi obojętnej (rysunek 8.9 - punkty I
i II) obliczamy ze wzorów
z
g
J
eM 1
1 =σ (8.17)

ROZDZIAŁ 8
Strona 76767676
z
g
J
eM 2
2 =σ (8.18)
gdzie: e1, e2 – odległości skrajnych punktów konturu przekroju od osi
obojętnej
Rysunek 8.9
Wprowadzamy następujące oznaczenia
1
1e
JW z= (8.19)
2
2e
JW z= . (8.20)
Powyższe wielkości nazwane są wskaźnikami wytrzymałości na zgina-
nie. A zatem, wskaźnik wytrzymałości na zginanie jest ilorazem momen-
tu bezwładności przekroju względem osi obojętnej i odległości od tej osi
skrajnych włókien.
Jeśli materiał, z którego wykonany jest pręt, ma jednakową wytrzymaość na rozciąganie i ściskanie (materiał izonomiczny), to o wytrzymałości
decydują naprężenia o największej bezwzględnej wartości. W tym przy-
padku należy wyznaczyć jeden wskaźnik wytrzymałości odpowiadający
największej odległości emax punktu przekroju od osi obojętnej

ZGINANIE PRĘTÓW
Strona 77777777
maxe
JW z= (8.21)
Największą wartość naprężenia σmax obliczamy ze wzoru
W
M g=maxσ (8.22)
W poprawnie zaprojektowanej belce powinien być spełniony następują-cy warunek wytrzymałościowy
crdop
gk
W
M,max =≤= σσ (8.23)
gdzie: kr,c – dopuszczalne naprężenie przy rozciąganiu lub ściskaniu
8.5. Równanie różniczkowe ugiętej osi belki
Działanie momentu gnącego powoduje zakrzywienie osi belki. W oma-
wianym zginaniu prostym, w którym kierunek wektora momentu gną-cego pokrywa się z kierunkiem głównej osi bezwładności przekroju, oś belki po odkształceniu jest krzywą płaską.
Rozpatrzmy belkę swobodnie podpartą na końcach i zginaną siłą skupio-
ną P (rysunek 8.10).
Rysunek 8.10
Przyjmijmy w początku belki układ współrzędnych prostokątnych,
którego oś x stanowi oś geometryczną nieodkształconej belki, a oś y

ROZDZIAŁ 8
Strona 78787878
skierowana jest do dołu. Dowolny przekrój o współrzędnej x obraca się o
kąt ϑ, a jego środek ciężkości przemieszcza się pionowo o y. Oś ugiętą belki opisuje równanie y = f(x), a jej krzywiznę wzór (8.15). Krzywiznę dowolnej krzywej płaskiej określa znana z geometrii różniczkowej
zależność
3
2
2
2
1
1
+
=
dx
dy
dx
yd
ρ (8.24)
Z porównania wzorów (8.15) i (8.24) otrzymujemy równanie różniczko-
we ugiętej osi belki
3
2
2
2
1
+
=−
dx
dy
dx
yd
EJ
M g (8.25)
Ze względu na stosunkowo dużą sztywność belek, a zatem małe prze-
mieszczenia liniowe i kątowe, z dostateczną dokładnością można przy-
jąć, że współrzędna y reprezentuje całkowite przemieszczenie liniowe,
a kąt obrotu przekroju ϑ (zawarty między osią belki nieodkształconej
i styczną do osi ugiętej) oznacza przemieszczenie kątowe. Przemieszcze-
nie liniowe y nazywane jest ugięciem, a kąt ϑ – kątem ugięcia.
Przy założonych małych przemieszczeniach kątowych mamy
ϑϑ ≈= tgdx
dy i mianownik prawej strony równości (8.25) można
przyjąć równy jedności. Otrzymujemy równanie uproszczone, które
zapisujemy w postaci
gMdx
ydEJ −=
2
2
(8.26)
Jest to tzw. równanie techniczne ugiętej osi belki, w którym iloczyn EJ
jest ogólnym oznaczeniem sztywności na zginanie. Znak „–” we
wzorach (8.25) i (8.26) wynika z przyjętej umowy określającej znak
momentu gnącego.

ZGINANIE PRĘTÓW
Strona 79797979
W celu wyznaczenia ugięć belki całkujemy dwukrotnie równanie (8.26),
otrzymujemy
CdxMdx
dyEJ g +−= ∫ stąd ( )CdxM
EJdx
dyg +−== ∫
1ϑ (8.27)
DCxdxdxMyEJ g ++−= ∫ ∫
stąd
( )( )DCxdxdxMEJ
y g ++−= ∫ ∫1
(8.28)
gdzie: C i D oznaczają stałe całkowania.
W przypadku gdy moment gnący opisany jest inną funkcją w kolejnych
przedziałach belki, należy napisać równania różniczkowe osi ugiętej
osobno dla każdego przedziału. Ze względu na ciągłość i gładkość linii
ugięcia, stałe całkowania muszą spełniać warunki ciągłości ugięć i kątów
ugięcia na granicach przedziałów. W takim przypadku sposób całkowa-
nia równania różniczkowego ma istotne znaczenie.
Przykład
Wyznaczmy równanie osi ugiętej belki swobodnie podpartej na końcach
i obciążonej siłą P (rysunek 8.11).
Rysunek 8.11
Z warunków równowagi wyznaczamy reakcje podpór, które wynoszą odpowiednio:
)( baPbRA += oraz )( baPaRB += .
Przyjmijmy układ współrzędnych x, y o początku w punkcie A belki.
Moment gnący Mg(x) należy określić w dwóch przedziałach

ROZDZIAŁ 8
Strona 80808080
0 ≤ x ≤ a xba
PbxRxM Ag
+==)(
a ≤ x ≤ l )()()( axPxba
PbaxPxRxM Ag −−
+=−−=
Równania różniczkowe osi ugiętej odpowiadające tym przedziałom cał-
kujemy osobno.
W przedziale 0 ≤ x ≤ a mamy
xR
dx
ydEJ A−=
2
2
1
2
12
Cx
RCdxxRdx
dyEJ AA +−=+−= ∫
11
3
11
2
62DxC
xRDxCdxx
RyEJ A
A ++−=++−= ∫
Całkowanie w przedziale a ≤ x ≤ l przeprowadzamy nie rozwijając wyra-
żeń w nawiasach
)(
2
2
axPxRdx
ydEJ A −+−=
2
22
2
2
)(
2
)(
CaxPx
R
CdxaxPdxxRdx
dyEJ
A
A
+−
+−=
=+−+−= ∫∫
22
33
22
22
6
)(
6
)(22
DxCaxPx
R
DxCdxaxP
dxxR
EJy
A
A
++−
+−=
=++−+−
= ∫∫
Stałe całkowania wyznaczamy z warunków brzegowych:
1) 0)0( =y

ZGINANIE PRĘTÓW
Strona 81818181
2) 0)( =ly
3) )()( 21 ayay =
4) )()( 21 aa ϑϑ =
Pierwsze dwa warunki wynikają ze sposobu podparcia belki, dwa kolej-
ne są warunkami ciągłości przemieszczeń.
Na podstawie warunku 4)
mamy
2
2
1
2
22C
aRC
aR AA +−=+− , a zatem jest C1 = C2.
Z warunku 3) otrzymujemy
22
3
11
3
66DaC
aRDaC
aR AA ++−=++−
a stąd, uwzględniając równość stałych C1 i C2, mamy D1 = D2
Z warunku 1)
jest D1 = 0.
Na podstawie warunku 2)
otrzymujemy równanie
0)(66
)(2
33
=++++
− baCb
Pba
RA
z którego po podstawieniu )( baPbRA += wyznaczamy stałą C2
( )( )22
2)(6
bbaba
PbC −+
+=
Zaletą zastosowanego sposobu całkowania równania różniczkowego osi
ugiętej jest równość odpowiednich stałych całkowania w obu przedzia-
łach C1 = C2 oraz D1 = D2. Sposób ten nazywany jest metodą Clebscha.
Metoda Clebscha wymaga przestrzegania następujących zaleceń.
a. Należy przyjąć wspólny dla wszystkich przedziałów belki układ
współrzędnych o początku w jednym z jej końców.

ROZDZIAŁ 8
Strona 82828282
b. Jeśli współrzędne ai określają położenie sił skupionych Pi lub
początków obciążenia ciągłego qi, to wyrażenia typu )( ii axP −
lub 2
)( 2
i
i
axq
− całkuje się według schematu
Cn
axdxax
n
in
i ++
−=−
+
∫ 1
)()(
1
c. W przypadku obciążenia ciągłego przyjmuje się układ równo-
ważny w taki sposób, aby każde zaczęte obciążenie ciągłe
przebiegało do końca belki.
d. W przypadku działania momentu skupionego do równania mo-
mentów gnących należy wprowadzić współrzędną określającą położenie tego momentu.
Rozpatrzmy belkę obciążoną momentem M, siłą P i obciążeniem cią-głym o intensywności q (rysunek 8.12)
Rysunek 8.12
Zgodnie ze stosowaną metodą rozpoczęte obciążenie ciągłe działa do
końca belki, a zatem w przedziale 5 należy wprowadzić obciążenie rów-
noważące ze znakiem przeciwnym (−q).
Ze względu na równość odpowiednich stałych całkowania równanie mo-
mentu gnącego można zapisać dla przedziału ostatniego, zaznaczając
końce poszczególnych przedziałów pionowymi kreskami z numerami
tych przedziałów.

ZGINANIE PRĘTÓW
Strona 83838383
Dla belki przedstawionej na rysunku 8.12 moment gnący określony jest
zależnością
5
2
4
2
32
0
1
2
)(
2
)()()(
dxq
cxqbxPaxMxRM Ag
−+
+−
−−−−+=
(8.29)
Zapisując równanie różniczkowe osi ugiętej zmieniamy znak momentu
gnącego
5
2
4
2
32
0
12
2
2
)(
2
)(
)()(
dxqcxq
bxPaxMxRdx
ydEJ A
−−
−+
+−+−−−=
(8.30)
Po scałkowaniu równania (8.3) otrzymujemy zależności określające kąt ugięcia i ugięcie
5
3
4
3
3
2
2
1
2
6
)(
6
)(
2
)()(
2
dxqcxq
bxPaxM
xRC
dx
dyEJ A
−−
−+
+−
+−−−=
(8.31)
5
4
43
3
2
2
1
3
24
)(
24
4)(
6
)(
2
)(
6
dxqcxqbxP
axMxRCxDyEJ A
−−
−+
−+
+−
−−+=
(8.32)
Stałe całkowania C i D wyznaczamy z warunków brzegowych wynikają-cych ze sposobu podparcia belki. Należy pamiętać, że obliczając prze-
mieszczenia z równań (8.31) i (8.32) bierze się pod uwagę tylko wyrazy
odpowiadające danemu przedziałowi. Stałe całkowania C i D, które
zapisuje się w pierwszym przedziale, są proporcjonalne odpowiednio do
kąta ugięcia i ugięcia belki w początku układu współrzędnych; mamy
bowiem EJC== 0)0( ϑϑ oraz EJDyy == 0)0( .

ROZDZIAŁ 8
Strona 84848484
8.6. Przykłady zastosowania metody Clebscha
1. Wyznaczyć funkcje ugięć belki o sztywności EJ opartej na dwóch
podporach w punktach A i B oddalonych o l. Belka obciążona jest w
sposób ciągły o stałej intensywności q (rysunek 8.13)
Rysunek 8.13
Zgodnie z metodą obciążenie ciągłe zostaje przedłużone do końca belki
(punkt C). A zatem, na odcinku BC należy wprowadzić obciążenia
równoważące przeciwnie skierowane (-q).
Reakcje podpór wynoszą
2
qlRR BA ==
Zmiany momentu gnącego określone są w dwóch przedziałach
zależnością
2
2
1
2
2
)()(
2
lxqlxR
qxxRM BAg
−+−+−=
Całkując równanie osi ugiętej
2
2
1
2
2
2
2
)()(
2
lxqlxR
qxxR
dx
ydEJ BA
−−−−+−=
otrzymujemy

ZGINANIE PRĘTÓW
Strona 85858585
2
32
1
32
3
)(
2
)(
62
lxqlxR
qxxRC
dx
ydEJ BA
−−
−−+−=
2
43
1
43
24
)(
6
)(
246
lxqlxR
qxxRCxDyEJ BA
−−
−−+−+=
Stałe całkowania C i D wyznaczamy z warunków podparcia belki:
1) y(0) = 0
2) y(l) = 0
Z warunku 1) mamy D = 0,
z warunku 2) otrzymujemy równanie
0246
43
=+−qll
RCl A ,
z którego po podstawieniu wzoru na reakcję RA wyznaczamy stałą całkowania C
24
3ql
C =
Ostatecznie ugięcia belki w poszczególnych przedziałach opisane są następującą funkcją
−−−−+−=
2
43
1
433
24
)()(
12241224
1 lxqlx
qlx
qx
qlx
ql
EJy
2. Wyznaczyć funkcję ugięcia osi belki swobodnie podpartej na końcach,
obciążonej w przekroju o współrzędnej x = a parą sił o momencie M.
Belka ma długość l i stałą sztywność EJ (rysunek 8.14).

ROZDZIAŁ 8
Strona 86868686
Rysunek 8.14
Reakcje podpór tworzą parę sił o wartościach obliczanych ze wzoru
l
MRR BA ==
Moment gnący określony jest w dwóch przedziałach, przy czym w
przedziale 2 moment skupiony M zapisano wprowadzając współrzędną położenia tego momentu
2
0
1)( axMxRM Ag −+−=
Równanie osi ugiętej ma następującą budowę
2
0
12
2
)( axMxRdx
ydEJ A −−=
Po dwukrotnym całkowaniu mamy
2
1
2
)(2
axMx
RCdx
ydEJ A −−+=
2
2
1
3
2
)(
6
axM
xRCxDyEJ A
−−++=
Stałe całkowania C i D wyznaczamy z warunków brzegowych odpowia-
dających swobodnemu podparciu belki:
1) y(0) = 0
2) y(l) = 0

ZGINANIE PRĘTÓW
Strona 87878787
Z warunku 1) mamy D = 0.
Warunek 2)
sprowadza się do równania
02
)(
6
23
=−
−+alMl
RCl A
z którego po podstawieniu RA = M/l wyznaczamy stałą C
( )22)(36
lall
MC −−=
Uwzględniając wyznaczone stałe całkowania, równaniu ugięć belki
można nadać następującą formę
( )
−−+−−=
2
2
1
322)(
26)(3
6
1ax
Mx
l
Mxlal
l
M
EJy

ROZDZIAŁ 8
Strona 88888888

`
9 Elementy teorii stanu naprężenia

ROZDZIAŁ 9
Strona 90909090
Stanem naprężenia w punkcie ciała nazywamy zbiór wszystkich wek-
torów naprężeń występujących we wszystkich dowolnie przeprowadzo-
nych przekrojach przechodzących przez ten punkt.
Rozważmy elementarny prostopadłościan o wymiarach dx, dy, dz, któ-
rego krawędzie są równoległe do osi x, y, z układu prostokątnego zwią-zanego z ciałem (rysunek 9.1)
Rysunek 9.1
Naprężenia występujące na ściankach tego elementu zostały rozłożone
na składowe normalne σx, σy, σz równoległe odpowiednio do osi x, y, z
oraz składowe styczne τxy, τxz, τyx, τyz, τzx, τzy oznaczone dwoma indeksa-
mi, przy czym pierwszy indeks odnosi się do normalnej przekroju,
a drugi wskazuje kierunek naprężenia.
Na podstawie warunków równowagi elementu można stwierdzić, że
składowe naprężeń stycznych prostopadłe do wspólnej krawędzi dwóch
wzajemnie prostopadłych przekrojów są sobie równe. Mamy zatem:
τxy = τyx, τyz = τzy, τzx = τxz.

ELEMENTY TEORII STANU NAPRĘŻENIA
Strona 91919191
Biorąc pod uwagę prawo równości naprężeń stycznych, można wykazać, że stan naprężenia w ogólnym przypadku jest określony przez sześć składowych stanu naprężenia: σx, σy, σz, τxy, τyz, τzx. Oznacza to, że
naprężenia w trzech wzajemnie prostopadłych przekrojach stanowią podstawę do wyznaczenia naprężenia w dowolnie zorientowanym prze-
kroju zawierającym ten punkt.
Zgodnie z teorią sprężystości przez każdy punkt dowolnie obciążonego
ciała przechodzą trzy wzajemnie prostopadłe płaszczyzny, w których nie
występują naprężenia styczne. Te szczególne płaszczyzny przekrojów,
charakteryzujące się zerowymi naprężeniami stycznymi nazywamy
płaszczyznami głównymi stanu naprężenia. Kierunki wyznaczone przez
normalne tych płaszczyzn są kierunkami głównymi. Naprężenia w płasz-
czyznach głównych, które są naprężeniami normalnymi, nazywamy
naprężeniami głównymi. Naprężenia główne oznacza się symbolami σ1,
σ2, σ3, przy czym przyjmuje się σ1 > σ2 > σ3. Indeksy 1, 2, 3
odpowiadają kierunkom głównym stanu naprężenia (rysunek 9.2).
Rysunek 9.2
Można zatem stwierdzić, że do określenia stanu naprężenia w dowolnym
punkcie ciała wystarczą trzy naprężenia główne σ1, σ2, σ3.
9.1. Płaski stan naprężenia
Stan naprężenia nazywamy płaskim, gdy jedno z naprężeń głównych jest
równe zeru. Płaski stan naprężenia ma miejsce w warstwie zewnętrznej

ROZDZIAŁ 9
Strona 92929292
obciążonego elementu, w przypadku gdy nie działają na nią siły
zewnętrzne.
Weźmy pod uwagę płaską, cienką tarczę obciążoną na krawędziach siła-
mi działającymi w płaszczyźnie tarczy. W dowolnym elemencie, w prze-
krojach prostopadłych do płaszczyzny obciążenia, których normalne są równoległe odpowiednio do osi x, y układu związanego z tarczą, występują składowe naprężenia σx, σy, τxy, τyx (rysunek 9.3).
Rysunek 9.3
W celu wyznaczenia naprężeń normalnych i stycznych w przekroju, któ-
rego zewnętrzna normalna tworzy kąt α z kierunkiem osi x rozpatrzmy
równowagę elementu pokazanego na rysunek 9.4.
Rysunek 9.4

ELEMENTY TEORII STANU NAPRĘŻENIA
Strona 93939393
Sumując elementarne siły na kierunki osi ξ i η, otrzymujemy
odpowiednio
ααταατ
αασαασσξ
cossin)90cos(cos
)90cos(sincoscos
dAdA
dAdAdA
yxxy
yx
+−+
+−+= (9.1)
oraz
ααταατ
αασααστξη
sinsin)90sin(cos
)90sin(sinsincos
dAdA
dAdAdA
yxxy
yx
−−+
+−+−= (9.2)
Po przekształceniach, uwzględniając podstawowe związki trygonome-
tryczne oraz równość naprężeń stycznych (τxy = τyx) wyznaczamy nastę-pujące zależności
ατασασσξ 2sinsincos 22
yxyx ++= (9.3)
ατασσ
τξη 2cos2sin2
xy
yx +−
−= (9.4)
Składową naprężenia ση w przekroju prostopadłym do osi η można
wyznaczyć podstawiając do wzoru (9.3) w miejsce kąta α kąt α’ = 90 + α
ατασασση 2sincossin 22
yxyx −+= (9.5)
Wzory (9.3, 9.4, 9.5) są zależnościami transformacyjnymi dla płaskiego
stanu naprężenia. Wzorom (9.3) i (9.5) można nadać inną formę
uwzględniając związki trygonometryczne )2cos1(2
1sin 2 αα −= oraz
)2cos1(2
1cos2 αα += . Ostatecznie otrzymujemy
ατασσσσ
σξ 2sin2cos22
xy
yxyx +−
++
= (9.6)
ατασσσσ
ση 2sin2cos22
xy
yxyx −−
−+
= (9.7)

ROZDZIAŁ 9
Strona 94949494
Jeden z kierunków głównych stanu naprężenia jest określony przez oś z prostopadłą do płaszczyzny elementu. Pozostałe kierunki główne wy-
znaczamy przyrównując do zera naprężenie styczne τξη
02cos2sin2
00 =+−
− ατασσ
xy
yx (9.8)
stąd mamy
yx
xytg
σσ
τα
−=
22 0 (9.9)
Rozwiązanie równania trygonometrycznego (9.9) ma postać
....) 2, 1, ( 2
10 =±= nnπ
αα (9.10)
gdzie α1 oznacza dodatni kąt ostry.
A zatem, rozwiązanie (9.10) wyznacza dwa wzajemnie prostopadłe
kierunki główne stanu naprężenia, które oznaczane są 1 i 2.
Kierunkom głównym odpowiadają przekroje główne, w których działają naprężenia główne σ1 i σ2, o wartościach danych wzorem
22
21 4)(2
1
2, xyyx
yx τσσσσ
σσ +−±+
= (9.11)
Trzecie naprężenie główne o kierunku wzdłuż osi z ma wartość równą zeru, σ3 = 0.
Gdy płaski stan naprężenia określony jest przez naprężenia główne σ1
i σ2, składowe naprężeń w dowolnych, wzajemnie prostopadłych prze-
krojach wyznaczamy z zależności transformacyjnych
ασσσσ
σξ 2cos22
2121 −+
+= (9.12)
ασσσσ
ση 2cos22
2121 −−
+= (9.13)

ELEMENTY TEORII STANU NAPRĘŻENIA
Strona 95959595
ασσ
τξη 2sin2
21 −−= (9.14)
9.2. Odwzorowanie płaskiego stanu naprężenia kołem Mohra
W płaskim stanie naprężenia określonym naprężeniami głównymi
σ1 > σ2 naprężenia w dowolnym przekroju prostopadłym do płaszczyzny
obciążenia można wyznaczyć stosując konstrukcję koła Mohra. Na osi
poziomej odkładane są naprężenia normalne, a na osi pionowej naprę-żenia styczne.
Przedstawione zadanie polega na wyznaczeniu składowych stanu naprę-żenia σx, σy, τxy w układzie osi x, y obróconym o kąt α względem układu
głównych osi 1, 2. W tym celu na osi poziomej odkładamy naprężenia σ1
(punkt B1) i σ2 (punkt B2) (rysunek 9.5).
Rysunek 9.5
W odległości 2)( 21 σσ +=OS znajduje się środek koła Mohra, z któ-
rego promieniem 2)( 21 σσ −=r kreślimy okrąg. Przez środek S rysu-
jemy prostą nachyloną do osi naprężeń normalnych pod kątem 2α.

ROZDZIAŁ 9
Strona 96969696
Współrzędne punktów Tx i Ty przecięcia prostej z okręgiem koła Mohra
wyznaczają w przyjętej podziałce poszukiwane składowe naprężenia w
układzie osi obróconych. Odcinki ORx i RxTx odpowiadają naprężeniom
σx i τxy w przekroju określonym normalną równoległa do osi x. Mierząc
odcinki ORy i RyTy wyznaczamy naprężenia σy i τyx = τxy w przekroju
prostopadłym, o normalnej równoległej do osi y. W przyjętym układzie
oś naprężeń stycznych zwrócona „do góry” odpowiada naprężeniom τyx
a zwrócona „do dołu” – naprężeniom τxy.
Na podstawie zależności trygonometrycznych otrzymujemy wzory trans-
formacyjne analogiczne do wzorów (9.12 – 9.14)
α
σσσσσ 2cos
22
2121 −+
+=x
(9.15)
α
σσσσσ 2cos
22
2121 −−
+=y
(9.16)
α
σστ 2sin
2
21 −−=xy
(9.17)
Łatwo zauważyć, że największe co do bezwzględnej wartości naprężenie
styczne występuje w przekrojach obróconych względem kierunków
głównych o kąt α = π/4 (na kole Mohra jest 2α = π/2)
21max2
1σστ −= (9.18)
Ostatecznie możemy stwierdzić, że okrąg koła Mohra jest miejscem
geometrycznym punktów, które określają wartości składowych płaskiego
stanu naprężenia w przypadku płaskiej, kątowej transformacji układu
osi.
Stosując konstrukcję koła Mohra, można rozwiązać zadanie odwrotne
tzn. wyznaczyć naprężenia główne, gdy dane są składowe stanu napręże-
nia σx, σy, τxy w dowolnym układzie osi.

`
10Stan odkształcenia. Uogólnione prawo Hooke’a

ROZDZIAŁ 10
Strona 98989898
W przypadku ogólnym, trójwymiarowemu stanowi naprężenia w dowol-
nym punkcie ciała, zdefiniowanemu przez sześć składowych σx, σy, σz,
τxy, τyz, τzx (rys. 9.1) odpowiada trójwymiarowy stan odkształcenia okreś-lony trzema odkształceniami liniowymi εx, εy, εz oraz trzema odkształce-
niami kątowymi γxy, γyz, γzx. Odkształcenia kątowe wpływają na zmianę postaci elementu i nazywane są kątami odkształceń postaciowych. Jeżeli
na ściankach elementarnego prostopadłościanu występują naprężenia
główne σ1, σ2, σ3 (rys. 9.2) to kierunki krawędzi prostopadłościanu,
które pokrywają się z kierunkami głównymi stanu naprężenia,
wyznaczają jednocześnie kierunki główne stanu odkształcenia. Oznacza
to, że w elementarnym prostopadłościanie zachodzi wyłącznie zmiana
długości krawędzi przy zachowaniu jego kształtu, a liniowe,
jednostkowe wydłużenia są odkształceniami głównymi. A zatem,
kierunki główne stanu naprężenia i stanu odkształcenia pokrywają się, i stan odkształcenia można jednoznacznie określić trzema składowymi –
odkształceniami głównymi ε1, ε2, ε3.
W płaskim stanie odkształcenia jedno z odkształceń głównych np. ε3 jest
równe zeru i stan odkształcenia określają pozostałe składowe ε1 i ε2.
Ze wzglądu na analogię między stanem odkształcenia i stanem napręże-
nia w celu wyznaczenia składowych odkształceń w układzie osi obróco-
nych o dowolny kąt α stosuje się wzory 9.12 ÷ 9.13, w których należy
zamienić σ na ε oraz τ na γ2
1.
Do wykreślnego odwzorowania płaskiego stanu odkształcenia i zadań
transformacyjnych wygodnie jest stosować konstrukcję koła Mohra.
Między składowymi stanu odkształcenia i składowymi stanu naprężenia
istnieją zależności potwierdzone doświadczalnie, znane jako prawo
Hooke’a.
W przypadku ścinania w płaszczyźnie wyznaczonej przez osie x, y od-
kształcenie elementarnego prostokąta pod wpływem naprężeń stycznych
τxy, τyx sprowadza się do zmiany kąta prostego o kąt odkształcenia posta-
ciowego γxy (rysunek 10.1)

STAN ODKSZTAŁCENIA. UOGÓLNIONE PRAWO HOOKE’A
Strona 99999999
Rysunek 10.1
Związek między odkształceniem postaciowym γxy a naprężeniem stycz-
nym τxy jest zgodny z prawem Hooke’a dla ścinania
G
xy
xy
τγ = (10.1)
W przekroju pręta rozciąganego występują naprężenia równoległe do osi
pręta np. σz. Obok odkształcenia εz wzdłuż osi pręta mierzone są odkształcenia poprzeczne εx i εy związane z odkształceniem wzdłużnym
zależnością
zyx ενεε −== (10.2)
w której ν oznacza współczynnik charakteryzujący właściwości materia-
łu zwany liczbą Poissona.
Sumując, zgodnie z zasadą superpozycji, odkształcenia liniowe wywoła-
ne przez poszczególne składowe naprężenia normalne oraz uwzględnia-
jąc efekt ścinania można wyznaczyć zależności między składowymi
stanu odkształcenia i naprężenia w formie następujących równań
( )[ ]zyxxE
σσνσε +−=1
G
xy
xy
τγ =
( )[ ]xzyyE
σσνσε +−=1
G
yz
yz
τγ = (10.3)
( )[ ]yxzzE
σσνσε +−=1
G
zxzx
τγ =

ROZDZIAŁ 10
Strona 100100100100
Równania (10.3) stanowią matematyczny zapis uogólnionego prawa
Hooke’a. Z równań tych wynika, że składowe stanu odkształcenia są jednorodnymi liniowymi funkcjami składowych stanu naprężenia.
W przypadku płaskiego stanu naprężenia mamy σz = 0, τyz = 0, τxz = 0
i prawo Hooke’a wyrażają równania
( )yxxE
νσσε −=1
( )xyyE
νσσε −=1
(10.4)
G
xy
xy
τγ =
W powyższych równaniach sprężyste właściwości materiału charaktery-
zują stałe: moduł Younga E, moduł Kirchhoffa G i liczba Poissona ν.
Można wykazać, że związane są one następującą zależnością
)1(2 ν+
=E
G (10.5)
A zatem, tylko dwie z nich są niezależne.

`
11 Hipotezy wytężenia

ROZDZIAŁ 11
Strona 102102102102
W większości przypadków elementy maszyn i konstrukcji są poddane
działaniu złożonych obciążeń, które wywołują dwu- lub trójwymiarowy
stan naprężenia. Ocena dostatecznej wytrzymałości konstrukcji technicz-
nej powinna opierać się na wynikach eksperymentalnych uzyskanych
przy zachowaniu charakteru rzeczywistych obciążeń poszczególnych
elementów. Badania takie byłyby jednak trudne do przeprowadzenia i
bardzo kosztowne. Dostępne są natomiast wskaźniki wytrzymałościowe
materiału wyznaczone w badaniach laboratoryjnych w jednoosiowym
stanie naprężenia np. prostym rozciąganiu lub ściskaniu. Stąd też powstała koncepcja określenia zachowania się materiału w przypadku
dowolnego stanu naprężenia na podstawie rezultatów badań w stanie
jednoosiowym.
W efekcie eksperymentów i analiz opartych na teorii sprężystości
i plastyczności sformułowano szereg hipotez określających warunki
pojawienia się stanu niebezpiecznego – tzw. stopień wytężenia
materiału.
Przez wytężenie materiału rozumiemy ogół zmian w stanie fizycznym
materiału, wywołany obciążeniem, prowadzący do powstania trwałych
odkształceń lub utraty spójności. W zależności od rodzaju materiału stan
niebezpieczny może być określony przez wytrzymałość na rozciąganie
Rm lub granicę plastyczności Re. Wytężenie zależy od właściwości ma-
teriału a także od obciążenia i składowych stanu naprężenia w punkcie
ciała.
11.1. Przegląd wybranych hipotez wytężenia
Najstarszą hipotezą wytężeniową jest hipoteza największego naprę-
żenia rozciągającego (VII w.). Za jej autorów uważa się Galileusza
i Leibnitza. Modyfikacją tej hipotezy, uwzględniającą także naprężenia
ściskające, jest hipoteza największego naprężenia normalnego
(Rankine i Clebsch XIX w.). Według tej hipotezy miarą wytężenia

HIPOTEZY WYTĘŻENIA
Strona 103103103103
materiału jest największe naprężenie normalne. Oznacza to, że żadne z
naprężeń głównych nie może być większe od wartości naprężenia nie-
bezpiecznego w jednoosiowym rozciąganiu i mniejsze od naprężenia
niebezpiecznego przy ściskaniu.
Doświadczenia nie potwierdziły słuszności tej hipotezy szczególnie
w przypadku materiałów sprężysto-plastycznych.
Hipotezą odkształceniową jest hipoteza największego wydłużenia roz-
powszechniona przez de Saint-Venanta (XIX w.). Według tej hipotezy
zniszczenie zachodzi wtedy, gdy największe jednostkowe wydłużenie
w złożonym stanie naprężenia osiągnie wartość wydłużenia odpowiada-
jącą naprężeniu niebezpiecznemu w jednoosiowym rozciąganiu.
Duże rozbieżności wyników obliczeniowych i doświadczalnych wskazu-
ją na małą przydatność także tej hipotezy w odniesieniu do materiałów
sprężysto-plastycznych.
Kolejną hipotezą wytężeniową jest hipoteza największych naprężeń
stycznych (τmax) zaproponowana przez Coulomba (XVIII w.) i rozwi-
nięta przez Tresca (XIX w.). Zakłada ona, że miarą wytężenia materiału
jest największe naprężenie styczne. A zatem, zniszczenie zachodzi wte-
dy, gdy największe naprężenie styczne w złożonym stanie naprężenia
osiągnie wartość naprężenia stycznego odpowiadającą naprężeniu nie-
bezpiecznemu w jednoosiowym rozciąganiu.
W trójosiowym stanie naprężenia największe naprężenie styczne τmax
wynosi
)(2
1minmaxmax σστ −= (11.1)
W jednoosiowym rozciąganiu mamy
0max2
1στ = (11.2)
Porównując wytężenia materiału w obu stanach, otrzymujemy napręże-
nie zredukowane w postaci
minmax σσσ −=red (11.3)
Warunek zachowania wytrzymałości materiału jest następujący

ROZDZIAŁ 11
Strona 104104104104
Zrred σσσσ ≤−= minmax (11.4)
gdzie σZr oznacza naprężenie niebezpieczne w prostym rozciąganiu.
W ogólnym stanie naprężenia określonym naprężeniami głównymi σ1,
σ2, σ3, zakładając jednakowej wytrzymałość przy rozciąganiu i ściskaniu
( ZcZr σσ −= ), warunek wytężenia (11.4) można zapisać następującym
układem nierówności
ZrZr σσσσ ≤−≥− 21
ZrZr σσσσ ≤−≥− 32 (11.5)
ZrZr σσσσ ≤−≥− 13
W płaskim stanie naprężenia określonym składowymi σx, σy, τxy
naprężenia główne wyznaczamy ze wzoru (9.11)
22
21 4)(2
1
2, xyyx
yx τσσσσ
σσ +−±+
=
Jeśli znaki naprężeń σ1 i σ2 są różne, to jest σ1 = σmax, σ2 = σmin, σ3 = 0,
a zatem naprężenie zredukowane dane jest wzorem
22
21 4)( xyyxred τσσσσσ +−=−= (11.6)
Jeśli oba naprężenia główne są dodatnie σ1 > σ2 > 0, wówczas mamy σ1
= σmax, σ3 = 0 = σmin i naprężenie zredukowane obliczamy ze wzoru
22
31 4)(2
1
2xyyx
yx
red τσσσσ
σσσ +−++
=−= (11.7)
W przypadku ujemnej wartości obu naprężeń głównych σ2 < σ1 < 0,
największe i najmniejsze naprężenia są odpowiednio równe σ3 =0 =
σmax, σ2 = σmin, i naprężenia zredukowane dane są wzorem
22
23 4)(2
1
2xyyx
yx
red τσσσσ
σσσ +−++
−=−= (11.8)

HIPOTEZY WYTĘŻENIA
Strona 105105105105
W stanie czystego ścinania, gdy jest σx = 0, σy = 0, τxy = τ, naprężenia
zredukowane na podstawie wzoru (11.6) wynoszą τσ 2=red . Oznacza
to, że niebezpieczne naprężenia styczne mają wartość ZrZ στ 5,0= .
Hipoteza największych naprężeń stycznych sprawdza się dość dobrze dla
materiałów sprężysto-plastycznych, szczególnie w płaskich stanach
naprężenia. Zastosowanie tej hipotezy do oceny wytężenia materiałów o
różnej wytrzymałości na rozciąganie i ściskanie umożliwiły późniejsze
wskazówki podane przez Mohra.
Podstawową, szeroko stosowaną hipotezą energetyczną jest hipoteza
największej energii odkształcenia postaciowego, nazywana od naz-
wisk jej autorów hipotezą Hubera (1904), Misesa (1913), Hencky’ego
(1924). Według tej hipotezy o wytężeniu materiału decyduje tylko część energii sprężystej związana ze zmianą postaci. Zniszczenie zachodzi
wtedy, gdy energia odkształcenia postaciowego w złożonym stanie
naprężenia osiągnie wartość energii odkształcenia postaciowego odpo-
wiadającą naprężeniu niebezpiecznemu w stanie jednoosiowym
(rozciąganiu).
W ogólnym stanie naprężenia jednostkowa energia odkształcenia posta-
ciowego (energia jednostki objętości ciała) wyrażona jest wzorem
( )[ ]222222 33
1zxyzxyxzzyyxzyxf
Eτττσσσσσσσσσ
νφ +++−−−++
+= (11.9)
Jednostkową energię w stanie jednoosiowym wyznaczamy podstawiając
do powyższego wzoru σx = σ0, σy = σz = 0, τxy = τyz = τzx = 0, co daje
2
03
1σ
νφ
Ef
+= (11.10)
Przyjmując, że wytężenia w obu stanach są równe, otrzymujemy nastę-pującą zależność na naprężenia zredukowane
( )222222 3 zxyzxyxzzyyxzyxred τττσσσσσσσσσσ +++−−−++= (11.11)
Gdy stan naprężenia określony jest przez naprężenia główne, wzór
(11.11) ma budowę
133221
2
3
2
2
2
1 σσσσσσσσσσ −−−++=red (11.12)

ROZDZIAŁ 11
Strona 106106106106
W płaskim stanie naprężenia jest σz = 0 oraz τyz = τzx = 0 lub σ3 = 0 i
wzory na naprężenia zredukowane przyjmują postać
222 3 xyyxyxred τσσσσσ +−+= (11.13)
lub
21
2
2
2
1 σσσσσ −+=red (11.14)
Warunek zachowania wytrzymałości materiału sprowadza się do żądania
by naprężenia zredukowane nie przekroczyły wartości naprężeń niebez-
piecznych w stanie jednoosiowego rozciągania Zrred σσ ≤ .
Na podstawie wzoru (11.13) podstawiając σx = 0, σy = 0, τxy = τ wyz-
naczamy naprężenia zredukowane w przypadku ścinania τσ 3=red ,
a stąd graniczne naprężenia styczne ZrZ στ 58,0= .
Hipoteza energii odkształcenia postaciowego została potwierdzona doś-wiadczalnie i znalazła szerokie zastosowanie w badaniu wytężenia ma-
teriałów sprężysto-plastycznych. Stosowanie tej hipotezy zarówno do
stanów sprężystych, jak również plastycznych uzasadnia brak stałych
sprężystych we wzorach na naprężenia zredukowane.
Na podstawie doświadczeń potwierdzono, że hipotezy największych na-
prężeń stycznych i energii odkształcenia postaciowego dają dostatecznie
dokładne wyniki w ustaleniu granicznych stanów naprężeń związanych z
uplastycznieniem materiału (kryterium plastyczności). Hipotezy naj-
większych naprężeń normalnych i odkształceń są hipotezami wytężenia
materiałów kruchych, których zniszczenie charakteryzuje złom
rozdzielczy.

`
12Złożone działanie sił wewnętrznych w prętach prostych

ROZDZIAŁ 12
Strona 108108108108
Złożone zagadnienia wytrzymałości prętów występują wtedy, gdy siły
wewnętrzne redukują się do więcej niż jednej składowej określającej
prosty przypadek obciążenia, tzn. siły podłużnej N, poprzecznej T,
momentu skręcającego Ms i momentu gnącego Mg. W rozwiązywaniu
złożonych zagadnień stosuje się zasadę superpozycji, sumując odpo-
wiednio wyniki (np. odkształcenia, naprężenia) otrzymane dla prostych
przypadków obciążenia. Metoda ta spełnia wymagania dotyczące
dokładności jedynie w zakresie dostatecznie małych odkształceń
i przemieszczeń.
12.1. Zginanie z rozciąganiem lub ściskaniem
Rozpatrzmy pręt, na który działają równolegle do jego osi x dwie równo-
ważące się siły P. Siły przyłożone są mimośrodowo w jednej z płasz-
czyzn bezwładności (wyznaczonej przez osie x i y) w odległości a od
głównej osi bezwładności przekroju z (rysunek 12.1).
Rysunek 12.1
W dowolnym przekroju siły wewnętrzne redukują się do siły podłużnej
N = P i momentu gnącego Mg = P a. Naprężenia w dowolnym punkcie
przekroju są sumą algebraiczną naprężeń normalnych wywołanych
rozciąganiem σr i zginaniem σg

ZŁOŻONE DZIAŁANIE SIŁ WEWNĘTRZNYCH W PRĘTACH PROSTYCH
Strona 109109109109
yJ
Pa
A
P
J
yM
A
N
zz
g
gr +=+=+= σσσ (12.1)
Największe naprężenia normalne występują w punktach przekroju
o współrzędnej y = ymax i ze względu na wytrzymałość powinny być ograniczone naprężeniami dopuszczalnymi σdop
dopW
Pa
A
Pσσ ≤+=max (12.2)
gdzie Wz oznacza wskaźnik wytrzymałości na zginanie maxyJW z= .
Podstawiając we wzorze (12.1) za moment bezwładności przekroju wy-
rażenie 2
zz iAJ = , otrzymujemy
+= y
i
a
A
P
z
21σ (12.3)
gdzie iz jest promieniem bezwładności przekroju.
W celu wyznaczenia położenia osi obojętnej w pręcie rozciąganym i
zginanym przyjmujemy w równaniu (12.3) zerową wartość naprężenia σ
= 0. Odległość osi obojętnej od głównej osi bezwładności przekroju
wynosi zatem
a
imy z
2
0 −== (12.3)
Z zależności (12.3) wynika, że zmniejszając mimośród a można
przesunąć oś obojętną poza przekrój, uzyskując w obszarze przekroju
naprężenia dodatnie. W przypadku granicznym, gdy jest a = 0, wystąpi
czyste rozciąganie. Zwiększanie mimośrodu powoduje wzrost udziału
zginania, które dominuje przy bardzo dużych wartościach mimośrodu.

ROZDZIAŁ 12
Strona 110110110110
12.2. Zginanie ze skręcaniem
Rozpatrzmy pręt o przekroju kołowym, który jednocześnie jest zginany
momentem Mg i skręcany momentem Ms. W przekroju pręta wystąpią naprężenia styczne i normalne o rozkładzie pokazanym na rysunku 12.2.
Rysunek 12.2
Największe naprężenia są w punktach najbardziej oddalonych od osi
obojętnej zginania i wynoszą
W
M g=maxσ , 0
maxW
M s=τ (12.4)
W tych punktach jest też największe wytężenie materiału. Zakładając
sprężysto-plastyczne właściwości materiału pręta, naprężenia
zredukowane możemy wyznaczyć na podstawie hipotezy Hubera-Misesa
lub hipotezy największych naprężeń stycznych.
Dla płaskiego stanu naprężenia określonego składowymi
σx = σmax, σy = 0, τxy = τmax naprężenia zredukowane według hipotezy
Hubera-Misesa wynoszą
2
max
2
max
222 33 τστσσσσσ +=+−+= xyyxyxred (12.5)

ZŁOŻONE DZIAŁANIE SIŁ WEWNĘTRZNYCH W PRĘTACH PROSTYCH
Strona 111111111111
lub podstawiając zależności (12.4)
2
0
2
3
+
=
W
M
W
Msg
redσ (12.6)
Uwzględniając w (12.6) związek między wskaźnikami wytrzymałości na
zginanie i skręcanie WW 20 = , ostatecznie mamy
W
MM sg
red
22
4
3+
=σ (12.7)
Wprowadzając oznaczenie momentu zredukowanego
22
4
3sgred MMM += (12.8)
warunek wytrzymałości wału zginanego i skręcanego zapisujemy w po-
dobnej formie jak dla zginania
dopred
redW
Mσσ ≤= (12.9)
W przypadku hipotezy maksymalnych naprężeń stycznych stosujemy
wzór na naprężenia zredukowane w płaskim stanie naprężenia, określo-
nym przez naprężenia główne σ1 i σ2 o różnych znakach (11.6)
2
max
2
max
22 44)( τστσσσ +=+−= xyyxred (12.10)
Po podstawieniu do powyższego wzoru zależności (12.4) i związku
między wskaźnikami wytrzymałości otrzymujemy
W
MM
W
M
W
M sgsg
red
222
0
2
4+
=
+
=σ (12.11)
Moment zredukowany według hipotezy „τmax” ma postać
22
sgred MMM += (12.12)

ROZDZIAŁ 12
Strona 112112112112
Oczywiście, ocena wytrzymałości polega na porównaniu wartości
naprężenia zredukowanego σred z naprężeniem dopuszczalnym σdop.
12.3. Przykłady obliczeń
1. Wyznaczyć największe naprężenia zredukowane w pręcie AB o śred-
nicy d i długości l utwierdzonym na jednym końcu z prostopadle przy-
mocowanym ramieniem BC o długości a (rysunek 12.3). Koniec C ra-
mienia obciążony jest pionową siłą P. Przyjąć następujące dane liczbo-
we: P = 20 N, l = 1 m, a = 0,5 m, d = 0,01 m.
Rysunek 12.3
Na podstawia warunków równowagi wyznaczamy reakcje w przekroju A
PRPR AA =⇒=− 0
PlMPlM AxAx =⇒=− 0
PaMPaM AyAy =⇒=+− 0
W pręcie AB, w przedziale 0 ≤ y ≤ l moment gnący wynosi
)()( ylPMyRyM AxAg −−=−=

ZŁOŻONE DZIAŁANIE SIŁ WEWNĘTRZNYCH W PRĘTACH PROSTYCH
Strona 113113113113
Moment skręcający ma wartość stałą
PaM s =
Ramię BC jest zginane momentem
)()( xaPMxRxM AyAg −−=−= , 0 ≤ x ≤ a
Wykresy momentów gnących i momentów skręcających pokazane są na
rysunku 12.4.
Rysunek 12.4
Naprężenia zredukowane wyznaczamy na podstawie hipotezy Hubera-
Misesa. Największe obciążenie występuje w przekroju utwierdzenia,
w którym moment gnący i moment skręcający wynoszą odpowiednio
Mg = Pl oraz Ms = Pa. Moment zredukowany obliczamy ze wzoru (12.8)
2222
4
3
4
3alPMMM sgred +=+=
Po podstawieniu danych liczbowych mamy
8,215,04
3120 22 =+=redM Nm
Wskaźnik wytrzymałości na zginanie obliczony z przybliżonego wzoru 31,0 dW ≅ wynosi
710−=W m3.
Ostatecznie, obliczamy naprężenia zredukowane
21810
8,217
===−
W
M redredσ MPa,

ROZDZIAŁ 12
Strona 114114114114
które nie powinny przekroczyć wartości naprężeń dopuszczalnych σdop.
2. Obliczyć minimalną średnicę d wału o długości l utwierdzonego na
jednym końcu, a na drugim z tarczą o promieniu R i ciężarze Q
(rys. 12.5). Na tarczę nawinięta jest lina obciążona siłą P.
W obliczeniach przyjąć: l = 0,16 m, R = 0,1 m, P = 200 N, Q = 50 N,
σdop = 200 MPa.
Z warunków równowagi wyznaczamy reakcje: RA = P + Q,
MAg = (P + Q) l, MAs = P R.
Z przedstawionych na rysunku 12.5 wykresów momentów gnących
i skręcających wynika, że najbardziej obciążony jest przekrój zamoco-
wania wału.
Rysunek 12.5
Zastosujmy hipotezę największych naprężeń stycznych. Zgodnie z tą hipotezą moment zredukowany wynosi
( ) 2222 )()( PRlQPMMM sgred ++=+=
Po podstawieniu danych liczbowych mamy
7,4452020)16,0250( 22 ==+⋅=redM Nm

ZŁOŻONE DZIAŁANIE SIŁ WEWNĘTRZNYCH W PRĘTACH PROSTYCH
Strona 115115115115
Na podstawie warunku wytrzymałości
dopred
redW
Mσσ ≤= ,
uwzględniając 323dW π= ,
0trzymujemy nierówność, na podstawie której dobieramy średnicę wału
332
dop
redMd
σπ≥
Podstawiając wartości liczbowe wyznaczamy najmniejsza wartość średnicy
2
36
1031,110200
7,4432 −⋅≅⋅⋅
⋅=
πd m

ROZDZIAŁ 12
Strona 116116116116

`
13Metody energetyczne - układy liniowosprężyste

ROZDZIAŁ 13
Strona 118118118118
Metody energetyczne oparte są na bilansie pracy sił zewnętrznych
i energii odkształcenia sprężystego układu. Metody te stanowią ważne
narzędzie do wyznaczania przemieszczeń i sił w tzw. układach
liniowosprężystych.
Układem liniowosprężystym (układem Clapeyrona) nazywamy układ,
w którym przemieszczenie dowolnego punktu wywołane działaniem
zrównoważonych sił zewnętrznych jest liniową funkcja tych sił.
W teorii układów liniowosprężystych wprowadza się pojęcie siły uogól-
nionej i przemieszczenia uogólnionego. Siłą uogólnioną jest każda skła-
dowa obciążenia, jeśli wielkość ta jednoznacznie określa cały układ sił
wywołany jej działaniem. A zatem, siłą uogólnioną jest siła skupiona
i moment skupiony. Przemieszczeniem uogólnionym odpowiadającym
sile skupionej jest rzut przemieszczenia liniowego na kierunek działania
siły. Momentowi skupionemu odpowiada przemieszczenie uogólnione
w postaci kąta obrotu w płaszczyźnie prostopadłej do wektora momentu.
Weźmy pod uwagę ciało sprężyste obciążone układem sił uogólnionych
Q1, Q2, ... Qn (rysunek 13.1).
Rysunek 13.1
Zgodnie z definicją, układy liniowosprężyste spełniają prawo superpozy-
cji i przemieszczenia uogólnione ui (i = 1,..., n) odpowiadające poszcze-
gólnym siłom Qi (i = 1,..., n) są równe sumie przemieszczeń wywoła-
nych działaniem każdej siły Qi oddzielnie. Możemy zatem zapisać

METODY ENERGETYCZNE - UKŁADY LINIOWOSPRĘŻYSTE
Strona 119119119119
nnnniinnn
inniiiiii
nnii
nnii
QQQQu
QQQQu
QQQQu
QQQQu
∆++∆++∆+∆=
∆++∆++∆+∆=
∆++∆++∆+∆=
∆++∆++∆+∆=
......
.............................................................
......
.............................................................
......
......
2211
2211
222222112
111221111
(13.1)
lub w ogólnej postaci
∑=
∆=n
j
ijji Qu1
(13.2)
Współczynnik ∆ij nazywany jest liczbą wpływową, która oznacza prze-
mieszczenie uogólnione odpowiadające sile Qi wywołane działaniem siły
uogólnionej Qj o wartości jednostkowej, przy czym jest ∆ij = ∆ji.
Układ liniowosprężysty musi spełniać następujące warunki:
1. materiał jest liniowosprężysty,
2. układ jest w równowadze,
3. nie występuje rozpraszanie energii (brak tarcia),
4. przemieszczenia są tak małe, że pomijalny jest ich wpływ na
skutki działania sił (wartości sił wewnętrznych, warunki równo-
wagi).
13.1. Energia sprężysta układów liniowosprężystych
W stanie równowagi energia sprężysta U (energia potencjalna wewnętrz-
nych sił sprężystości) jest równa pracy sił zewnętrznych L
LU = (13.3)

ROZDZIAŁ 13
Strona 120120120120
W celu obliczenia pracy sił zewnętrznych zakładamy, że proces obciąże-
nia odbywa prawie statycznie (quasi-statycznie) i w każdej chwili zacho-
wana jest równowaga między siłami zewnętrznymi i wewnętrznymi.
Obliczmy energię sprężystą pręta rozciąganego siłą P, którego wydłuże-
nie wynosi λ. Elementarna praca jest iloczynem działającej siły i ele-
mentarnego przyrostu wydłużenia pręta du
duPdL = (13.4)
Podstawiając w powyższym równaniu w miejsce P zależność ul
EAP = ,
a następnie całkując w granicach od 0 do λ otrzymujemy następujące
wzory na energię sprężystą pręta
λλλ
PPEA
l
l
EAduu
l
EAU
2
1
2
1
2
1 22
0
==== ∫ (13.5)
A zatem, energia sprężysta jest równa połowie iloczynu siły rozciągają-cej pręt i wywołanego wydłużenia.
W przypadku ogólnym energia sprężysta układu liniowosprężystego jest
sumą prac wszystkich sił uogólnionych
i
n
i
iuQU ∑=
=12
1 (13.6)
Energia sprężysta układu liniowosprężystego jest równa połowie sumy
iloczynów sił obciążających układ i odpowiadających im przemieszczeń.
Podstawiając we wzorze (13.6) w miejsce przemieszczenia uogólnione-
go ui wyrażenie (13.2) mamy
∑∑= =
∆=n
i
ij
n
j
ij QQU1 12
1 (13.7)
Z powyższego wzoru wynika, że energia sprężysta jest jednorodną kwadratową funkcją sił uogólnionych. Oznacza to, że przy obliczaniu
energii nie można stosować zasady superpozycji.
Energię sprężystą można także wyznaczyć jako pracę sił wewnętrznych.
Na podstawie wzoru (13.5) energia sprężysta jednostkowej długości

METODY ENERGETYCZNE - UKŁADY LINIOWOSPRĘŻYSTE
Strona 121121121121
pręta, w którym obciążenie osiowe wywołuje wzdłużną siłę wewnętrzną N, wynosi
EA
N
dx
dU2
2
1= (13.8)
Dla innych prostych przypadków obciążenia pręta mamy:
ścinanie GA
T
dx
dU2
2
1 β= (13.9)
skręcanie 0
2
2
1
GJ
M
dx
dU s= (13.10)
zginanie EJ
M
dx
dU g
2
2
1= (13.11)
Współczynnik β we wzorze (13.9) zależy od kształtu przekroju.
Na podstawie przedstawionych zależności stwierdzamy, że energia
sprężysta jednostki długości pręta jest równa połowie ilorazu kwadratu
siły wewnętrznej i odpowiedniej sztywności.
13.2. Twierdzenie Castigliana
Obliczmy pochodną energii sprężystej danej zależnością (13.7) wzglę-dem dowolnej siły uogólnionej Qk
( ) ∑∑∑∑= == =
∂
∂+
∂
∂∆=∆
∂
∂=
∂
∂ n
i
n
j
j
k
i
i
k
j
ij
n
i
n
j
ijij
kk
Q
QQQ
U
1 11 1 2
1
2
1 (13.12)
Zauważmy, że pochodne w równaniu (13.12) przyjmują wartości
≠
==
∂
∂
kj
kj
Q
Q
k
j
dla 0
dla 1 oraz
≠
==
∂
∂
ki
ki
Q
Q
k
i
dla 0
dla 1
A zatem, mamy

ROZDZIAŁ 13
Strona 122122122122
( )∑∑ ∑∑= = ==
∆+∆=∆+∆=∂
∂ n
i
n
j
n
j
jkj
n
i
iikjkjiik
k
QQQQQ
U
1 1 11 2
1
2
1
2
1 (13.13)
Zmieniając wskaźnik sumowania w drugim składniku z j na i oraz
uwzględniając równość odpowiednich liczb wpływowych, otrzymujemy
∑=
∆=∂
∂ n
i
iki
k
U
1
(13.14)
Wyrażenie po prawej stronie równania oznacza przemieszczenie
uogólnione uk
k
k
uQ
U=
∂
∂ (13.15)
Powyższe równanie wyraża twierdzenia Castigliana.
Pochodna cząstkowa energii sprężystej układu liniowosprężystego
względem siły uogólnionej jest równa przemieszczeniu uogólnionemu
odpowiadającemu tej sile, wywołanemu działaniem wszystkich sił obcią-żających układ.
W przypadku gdy wyznaczamy przemieszczenie odpowiadające działa-
jącej sile, stosujemy bezpośrednio twierdzenie Castigliana. Jeśli poszu-
kujemy przemieszczenia, dla którego brak rzeczywistej siły uogólnionej,
należy wprowadzić dodatkową (fikcyjną) siłę odpowiadającą temu prze-
mieszczeniu, uwzględnić wywołane jej działaniem siły wewnętrzne,
obliczyć pochodną energii sprężystej i w końcowym wyniku przyjąć wartość zerową siły dodatkowej.
W obliczeniach przemieszczeń konstrukcji prętowej o elementach zgina-
nych energię sprężystą można ograniczyć do energii czystego zginania,
pomijając energię ścinania spowodowaną działaniem siły poprzecznej
jako stosunkowo małą. A zatem, energia sprężysta układu złożonego z n
zginanych odcinków prętowych dana jest wzorem
∫∑=
=)(
2
1
1
2
1
il
gi
n
i ii
dxMJE
U (13.16)
gdzie: iloczyn ii JE jest sztywnością na zginanie i-tego odcinka pręta,
Mgi oznacza funkcję momentu gnącego na odcinku li.

METODY ENERGETYCZNE - UKŁADY LINIOWOSPRĘŻYSTE
Strona 123123123123
Na podstawie twierdzenia Castigliana ugięcie (odpowiadające sile P)
obliczamy ze wzoru
∫∑∫∑∂
∂=
∂
∂=
== )(1)(
2
1
11
2
1
ii l
gi
gi
n
i iil
gi
n
i ii
dxP
MM
JEdxM
JEPy (13.17)
W celu obliczenia kąta ugięcia wyznaczamy pochodną energii sprężystej
względem momentu skupionego M
∫∑∫∑∂
∂=
∂
∂=
== )(1)(
2
1
11
2
1
ii l
gi
gi
n
i iil
gi
n
i ii
dxM
MM
JEdxM
JEMϑ (13.18)
W przypadku jednakowej sztywności wszystkich odcinków prętowych
układu ugięcie i kąt ugięcia obliczamy ze wzorów
∑ ∫= ∂
∂=
n
i l
gi
gi
i
dxP
MM
EJy
1 )(
1 (13.19)
∑ ∫= ∂
∂=
n
i l
gi
gi
i
dxM
MM
EJ 1 )(
1ϑ (13.20)
13.3. Przykłady wyznaczania przemieszczeń w układach prętowych
1. Na belkę swobodnie podpartą działa siła P i moment M (rysu-
nek 13.2). Wyznaczyć związek między składnikami obciążenia, aby
przemieszczenie końca C belki było zerowe. Sztywność belki jest stała
i wynosi EJ.

ROZDZIAŁ 13
Strona 124124124124
Rysunek 13.2
Na podstawie warunków równowagi wyznaczamy reakcje podpór:
Pl
MRA += , P
l
MRB 2+=
Stosując bezpośrednio twierdzenie Castigliana, wyznaczamy ugięcie
punktu C belki
∂
∂+
∂
∂=
∂
∂= ∫∫
l
l
l
C dxP
MMdx
P
MM
EJP
Uy
2
22
0
11
1
Momenty gnące wynoszą:
w przedziale lx ≤≤0
xPl
MMxRMM A
+−=−=1
w przedziale lxl 2≤≤
( )
( ) ( )xlPlxPl
MxP
l
MM
lxRxRMM BA
−−=−
++
+−=
=−+−=
22
2
stąd
xP
M−=
∂
∂ 1 , ( )xlP
M−−=
∂
∂22
Po podstawieniu funkcji momentów gnących i ich pochodnych do wzoru
na ugięcie, a następnie scałkowaniu otrzymujemy

METODY ENERGETYCZNE - UKŁADY LINIOWOSPRĘŻYSTE
Strona 125125125125
( )
−=
=
−+
++−= ∫∫
63
21
21
22
0
2
MPl
EJ
dxxlPdxxPl
MMx
EJy
l
l
l
C
A zatem, warunek 0=Cy jest spełniony, gdy jest M = 4Pl.
2. W belce jak na rysunku 13.3 jednostronnie utwierdzonej i obciążonej
obciążeniem rozłożonym o intensywności q wyznaczyć kąt ugięcia swo-
bodnego końca. Przyjąć długość belki l i stałą sztywność na zginanie EJ.
Rysunek 13.3
W celu wyznaczenia kąta ugięcia υB należy w punkcie B przyłożyć dodatkowy (fikcyjny) moment Md.
Na podstawie warunków równowagi wyznaczamy reakcje utwierdzenia.
Wynoszą one: qlR A2
1= , dA MqlM += 2
8
1
Twierdzenie Castigliana zapisujemy w postaci
∂
∂+
∂
∂=
∂
∂= ∫∫
l
l d
l
dd
B dxM
MMdx
M
MM
EJM
U
2
22
2
0
11
1υ
Momenty gnące wynoszą:
w przedziale 2
0l
x ≤≤

ROZDZIAŁ 13
Strona 126126126126
dMM −=1
w przedziale lxl
≤≤2
2
222
1
−−−=
lxqMM d
stąd
11 −=∂
∂
dM
M, 12 −=
∂
∂
dM
M
oraz
−++= ∫∫
l
l
d
l
dB dxl
xqMdxMEJ
2
22
022
11υ
Po podstawieniu Md = 0 i scałkowaniu otrzymujemy
∫ =
−=
l
l
BEJ
qldx
lxq
EJ2
32
4822
1υ
3. Wyznaczyć ugięcie środka belki o stałej sztywności EJ i długości l.
Belka jest swobodnie podparta na końcach i obciążona na całej długości
obciążeniem równomiernym q (rysunek 13.4)
Rysunek 13.4

METODY ENERGETYCZNE - UKŁADY LINIOWOSPRĘŻYSTE
Strona 127127127127
W celu wyznaczenia ugięcia środka belki należy w punkcie C przyłożyć dodatkową (fikcyjną) siłę Fd. Z ogólnych warunków równowagi wyzna-
czamy reakcje podpór )(2
1dBA FqlRR +==
Na podstawie twierdzenia Castigliana mamy
∂
∂+
∂
∂=
∂
∂= ∫∫
l
l d
l
dd
C dxF
MMdx
F
MM
EJF
Uy
2
22
2
0
11
1
Momenty gnące wynoszą:
w przedziale 2
0l
x ≤≤
( )22
1 )(2
1
2
1qxxFqlqxxRM dA −+=−=
w przedziale lxl
≤≤2
( )
−−−+=
−−−=
2)(
2
1
22
1 22
2
lxFqxxFql
lxFqxxRM dddA
Obliczamy pochodne cząstkowe
xF
M
d 2
11 =∂
∂, ( )xl
lxx
F
M
d
−=
−−=
∂
∂
2
1
22
12
A zatem, ugięcie yC dane jest równaniem
( )( )
( )( ) ( )
−
−−−++
+−+=
∫
∫
dxxll
xFqxxFql
dxxqxxFqlEJ
y
l
l
dd
l
dC
2
2
2
0
2
24
1
4
11

ROZDZIAŁ 13
Strona 128128128128
Po podstawieniu Fd = 0 i scałkowaniu otrzymujemy
( ) ( )
( ) ( )
EJ
qlxx
lx
lxx
l
EJ
q
dxxlxxldxxlxEJ
q
dxxlxlxqdxxxlxqEJ
y
l
l
l
l
l
l
ll
l
l
l
l
l
l
C
4
2
4
2
3
2
22
2
0
42
0
3
2
3222
0
32
2
22
0
2
384
5
4
1
3
2
24
1
34
24
)(4
1
=
+−+−
=
+−+−
=
−−+−=
∫∫
∫∫
4. Rama złożona z dwóch sztywno połączonych prętów, podparta swo-
bodnie na końcach A i B, obciążona jest obciążeniem rozłożonym
o stałej intensywności q i siłą skupioną P (rysunek 13.5). Zakładając
stałą sztywność EJ prętów, wyznaczyć przesunięcie podpory B.
Rysunek 13.5
Wprowadzamy fikcyjną siłę Fd działającą w kierunku poszukiwanego
przesunięcia podpory C. Z warunków równowagi wyznaczamy reakcje
podpór:

METODY ENERGETYCZNE - UKŁADY LINIOWOSPRĘŻYSTE
Strona 129129129129
dAx FP
qlR +−=2
, dAy FqlR += 2 ,
dB FP
qlR ++=2
Energię sprężystą ograniczamy do działania momentu gnącego. Wpro-
wadzając lokalne współrzędne x1, x2, x3, odpowiadające przedziałom
zmienności momentu gnącego, twierdzenie Castigliana zapisujemy
w postaci
∂
∂+
∂
∂+
∂
∂=
∂
∂= ∫∫∫
l
d
l
d
l
dd
B dxF
MMdx
F
MMdx
F
MM
EJF
Uy
0
33
3
0
22
2
2
0
11
1
1
Momenty gnące wynoszą:
w przedziale lx ≤≤ 10
1
2
11
2xF
qxM d−−=
w przedziale lx ≤≤ 20
222
2xF
PqlxRM dAx
+−−=−=
w przedziale lx ≤≤ 30
33333 )(
2)( PxxlF
PqlPxxlRM dAx −+
+−−=−+−=
Obliczamy pochodne cząstkowe
11 x
F
M
d
−=∂
∂, 2
2 xF
M
d
−=∂
∂, )( 3
3 xlF
M
d
+−=∂
∂
Przesunięcie yC określa wzór

ROZDZIAŁ 13
Strona 130130130130
+
++
+−+
+
+−+
+=
∫
∫∫l
d
l
d
l
dB
dxxlPxxlFP
ql
dxxFP
qldxxxFqx
EJy
0
3333
0
2
2
2
2
0
111
2
1
)()(2
22
1
Po podstawieniu Fd = 0 i scałkowaniu otrzymujemy
[ ]PqlEJ
l
dxxlPxxlP
ql
dxxP
qldxqx
EJy
l
ll
B
3286
)()(2
22
1
3
0
3333
0
2
2
2
2
0
1
3
1
−=
=
+
++
−+
+
−+=
∫
∫∫
13.4. Twierdzenie Menabrei-Castigliana
Twierdzenie Menabrei-Castigliana służy do wyznaczania wielkości
statycznie niewyznaczalnych (nadliczbowych) w układach statycznie
niewyznaczalnych. Rozróżniamy dwa rodzaje statycznej niewyznaczal-
ności – zewnętrzną i wewnętrzną. Zewnętrzna statyczna niewyznaczal-
ność jest wtedy, gdy liczba reakcji podpór (nałożonych więzów)
przekracza liczbę równań równowagi. W przypadku wewnętrznej
statycznej niewyznaczalności reakcje podpór są statycznie wyznaczalne,
natomiast nie można określić wartości sił wewnętrznych na podstawie
równań równowagi.
Oczywiste jest, że w układzie sztywno podpartym przemieszczenie
odpowiadające reakcji traktowanej jako siła uogólniona jest równe zeru.
Na podstawie twierdzenia Castigliana możemy napisać
0=∂
∂
iR
U (13.21)

METODY ENERGETYCZNE - UKŁADY LINIOWOSPRĘŻYSTE
Strona 131131131131
Powyższy zapis jest słuszny wyłącznie w odniesieniu do reakcji nadlicz-
bowych w układach statycznie niewyznaczalnych, gdyż wszystkie pozo-
stałe reakcje powiązane są warunkami równowagi.
Równanie (13.21) wyraża treść twierdzenia Menabrei-Castigliana.
W układzie liniowosprężystym sztywno podpartym pochodna cząstkowa
energii sprężystej całego układu względem wielkości podporowej sta-
tycznie niewyznaczalnej jest równa zeru.
Powyższe twierdzenie oznacza spełnienie warunku ekstremum energii
sprężystej układu traktowanej jako funkcja reakcji statycznie niewyzna-
czalnej. Jest to zarazem warunek minimum energii, gdyż druga pochod-
na energii sprężystej względem reakcji statycznie niewyznaczalnej jest
zawsze dodatnia. Stąd też twierdzenie Menabrei-Castigliana nazywane
jest także zasadą minimum energii.
Twierdzenie Menabrei-Castigliana można również stosować do rozwią-zywania układów wewnętrznie statycznie niewyznaczalnych, tzn. obli-
czania statycznie niewyznaczalnych sił wewnętrznych.
13.5. Przykłady wyznaczania wielkości statycznie niewyznaczalnych
1. Dla belki o stałej sztywności EJ, przedstawionej na rysunku 13.6, wy-
znaczyć reakcję podpory B.
Rysunek 13.6

ROZDZIAŁ 13
Strona 132132132132
Przyjmujemy reakcję RB jako wielkość statycznie niewyznaczalną. Z ogólnych warunków równowagi wyznaczamy pozostałe reakcje pod-
pór w zależności od reakcji statycznie niewyznaczalnej:
RA = P – RB, MA = Pl/2 – RBl.
Na podstawie twierdzenia Menabrei-Castigliana otrzymujemy dodatko-
we równanie
01
2
22
2
0
11 =
∂
∂+
∂
∂=
∂
∂∫∫l
l B
l
BB
dxR
MMdx
R
MM
EJR
U
Momenty gnące wynoszą:
w przedziale 2
0l
x ≤≤
( )
−−−=+−= x
lPxlRxRMM BAA
21
w przedziale lxl
≤≤2
( )xlRl
xPxRMM BAA −=
−−+−=
22
stąd
xlR
M
B
−=∂
∂ 1 , xlR
M
B
−=∂
∂ 2
Dodatkowe równanie ma postać
( ) ( ) ( ) 02
2
22
0
=−+−
−−− ∫∫
l
l
B
l
B dxxlRdxxlxl
PxlR
Po scałkowaniu otrzymujemy

METODY ENERGETYCZNE - UKŁADY LINIOWOSPRĘŻYSTE
Strona 133133133133
048
5
3
1 33 =− PllRB
A zatem, reakcja statycznie niewyznaczalna wynosi PRB16
5=
2. Wyznaczyć reakcje podpór belki o stałej sztywności EJ, przedstawio-
nej na rysunku 13.7.
Rysunek 13.7
Zadanie jest jednokrotnie statycznie niewyznaczalne. Jako nadliczbową wielkość przyjmujemy reakcję RB. Z warunków równowagi wyznaczamy
pozostałe reakcje: RA = ql – RB, MA = 3ql2/2 – RBl.
Momenty gnące wzdłuż osi x1 i x2 wynoszą:
w przedziale lx ≤≤ 10
2
112
1qxM −=
w przedziale lx ≤≤ 20
+−=
2222
lxqlxRM B
Niezerową wartość ma tylko pochodna momentu M2
22 x
R
M
B
=∂
∂

ROZDZIAŁ 13
Strona 134134134134
Na podstawie twierdzenia Menabrei-Castigliana mamy
02
112
0
222
0
22
2 =
+−=
∂
∂=
∂
∂∫∫ dxx
lxqlxR
EJdx
R
MM
EJR
Ul
B
l
BB
Po scałkowaniu otrzymujemy
012
7
3
1 43 =− qllRB
a stąd qlRB4
7= . Pozostałe reakcje wynoszą: qlRA
4
3−= ,
2
4
1qlM A −= (znak minus wskazuje na przeciwny zwrot reakcji).
3. Rama złożona z dwóch sztywno połączonych prętów, podparta prze-
gubowo na końcach A i C, obciążona jest obciążeniem rozłożonym o
stałej intensywności q (rysunek 13.8). Zakładając stałą sztywność EJ
prętów, wyznaczyć reakcje podpór.
Rysunek 13.8

METODY ENERGETYCZNE - UKŁADY LINIOWOSPRĘŻYSTE
Strona 135135135135
Jako wielkość statycznie niewyznaczalną przyjmujemy reakcję RCy.
Pozostałe reakcje nieprzesuwnych podpór przegubowych, na podstawie
ogólnych warunków równowagi wynoszą:
RAy = ql – RCy, RCx = ql/2 – RCy, RAx = RCx.
Wprowadzając lokalne współrzędne x, y, odpowiadające przedziałom
zmienności momentu gnącego, twierdzenie Menabrei-Castigliana zapi-
sujemy w postaci
01
0
22
0
11 =
∂
∂+
∂
∂=
∂
∂∫∫l
Cy
l
CyCy
dyR
MMdx
R
MM
EJR
U
Wyznaczamy momenty gnące wzdłuż osi x i y:
w przedziale lx ≤≤0
2
12
1qxxRM Cy −=
w przedziale ly ≤≤0
qlyyRyRM CyAx2
12 −=−=
oraz ich pochodne
xR
M
Cy
=∂
∂ 1
yR
M
Cy
=∂
∂ 2
Dodatkowe równanie ma postać
02
1
2
1
00
2 =
−+
− ∫∫
l
Cy
l
Cy ydyqlyyRdxxqxxR
Po scałkowaniu i przekształceniach otrzymujemy
024
7
3
2 43 =− qllRCy

ROZDZIAŁ 13
Strona 136136136136
a stąd qlRCy16
7=
Pozostałe reakcje wynoszą: qlRAy16
9= , qlRR CxAx
16
1== .

`
14 Stateczność prętów ściskanych

ROZDZIAŁ 14
Strona 138138138138
Pręty ściskane osiowo, których długość jest wielokrotnie większa od
wymiarów poprzecznych, ulegają zniszczeniu przy wartościach naprężeń
znacznie mniejszych od wytrzymałości na ściskanie. Przyczyną znisz-
czenia jest utrata stateczności prostej postaci pręta, tzn. wychylenie z po-
łożenia równowagi i przejście w stan równowagi niestatecznej (chwiej-
nej). Graniczną wartość siły, przy której ściskany pręt traci stateczność prostoliniowej postaci nazywamy siłą krytyczną i oznaczamy symbolem
Pkr. Siłę krytyczną należy traktować jako siłę niszczącą, gdyż niewielki
jej wzrost powoduje postępujące wygięcie pręta i jego zniszczenie.
Zjawisko niestateczności prostoliniowej postaci pręta ściskanego nazy-
wamy wyboczeniem.
14.1. Sprężyste wyboczenie pręta
Rozpatrzmy zagadnienie wyznaczania siły krytycznej w przypadku
ściskanego pręta podpartego przegubowo na obu końcach (rysunek
14.1).
Stosując sposób podany przez Eulera, wyznaczamy warunki konieczne
do zachowania równowagi pręta w postaci wykrzywionej. Otrzymujemy
następujące równanie ugiętej osi pręta
PyMxd
ydEJ g −=−=
2
2
(14.1)
Dzieląc obie strony równania (14.1) przez sztywność na zginanie EJ, po
prostych przekształceniach mamy
02
2
2
=+ ykxd
yd (14.2)
gdzie oznaczono

STATECZNOŚĆ PRĘTÓW ŚCISKANYCH
Strona 139139139139
EJ
Pk =2 (14.3)
Rysunek 14.1
Rozwiązanie ogólne jednorodnego równania (14.2) ma postać
kxBkxAy cossin += (14.4)
Na podstawie warunków brzegowych
00
==x
y oraz 0==lx
y (14.5)
otrzymujemy B = 0 oraz
0sin =klA (14.6)

ROZDZIAŁ 14
Strona 140140140140
Równanie (14.6) jest spełnione w dwóch przypadkach: gdy stała A ma
zerową wartość, co odpowiada prętowi prostemu (y = 0), oraz gdy
zachodzi związek
0sin =kl , (14.7)
który jest spełniony dla ciągu πnkl = przy n = 1, 2,....
Zakładając siłę ściskającą różną od zera (P ≠ 0) oraz n = 1, z zależności
π=kl , zgodnie z przyjętym oznaczeniem (14.3), wyznaczamy naj-
mniejszą wartość siły ściskającej powodującej wyboczenie, tzw. siłę krytyczną
2
2
l
EJPkr
π= (14.8)
Sile krytycznej odpowiada ugięcie osi pręta opisane z dokładnością do
stałej A następującym równaniem
xl
Ayπ
sin= (14.9)
Podstawiając kolejne wartości kl (2π, 3π,...) otrzymujemy wyższe
wartości sił krytycznych którym odpowiada ugięta osi pręta w kształcie
dwóch, trzech itd. połówek fali sinusoidy. Tak obliczone wartości sił nie
mają praktycznego znaczenia, gdyż wyboczenie w postaci półfali sinu-
soidy (14.9) wywołane najmniejszą siła krytyczną przy wzroście siły
spowoduje dalsze zginanie i w konsekwencji zniszczenie pręta.
Podobnie jak w opisanym przypadku wyboczenia pręta zamocowanego
przegubowo na końcach, można określić siłę krytyczną odpowiadającą różnym warunkom brzegowym wzorem Eulera w ogólnej formie
2
2
w
krl
EJP
π= (14.10)
gdzie lw oznacza długość wyboczeniową zależną od sposobu zamocowa-
nia pręta.
Na rysunku 14.2 pokazano kształt wygiętej osi pręta z zaznaczoną długością wyboczeniową dla kilku podstawowych rodzajów podparcia.

STATECZNOŚĆ PRĘTÓW ŚCISKANYCH
Strona 141141141141
Rysunek 14.2
Dzieląc obie strony wzoru na siłę krytyczną przez pole przekroju A,
wyznaczamy naprężenie krytyczne
Al
EJ
w
kr 2
2πσ = (14.11)
Wprowadźmy pojęcie smukłości pręta zdefiniowane jako stosunek
długości wyboczeniowej lw do promień bezwładności przekroju i
i
lw=λ (14.12)
Podstawiając do wzoru (14.11) zależność J = A i2 oraz wzór na smukłość
otrzymujemy
2
2
λ
πσ
Ekr = (14.13)
Moduł Younga E materiału pręta ma stałą wartość, zatem równanie
(14.13) opisuje zależność naprężenia krytycznego od smukłości.
Obrazem tej zależności na wykresie w układzie osi σkr, λ jest krzywa
nazywana hiperbolą Eulera (rysunek 14.3)

ROZDZIAŁ 14
Strona 142142142142
Rysunek 14.3
Jak wynika z wykresu, wraz ze zmniejszaniem smukłości naprężenie
krytyczne wyraźnie wzrasta dążąc do nieograniczonych wartości. Ko-
nieczne jest zatem ustalenie kryterium stosowalności wzoru Eulera. Pod-
stawowym warunkiem jest sprężyste zachowanie materiału zgodne
z prawem Hooke’a. Oznacza to, że panujące w pręcie naprężenie nie
może przekroczyć granicy proporcjonalności RH (rys. 14.3). Naprężeniu
σkr = RH odpowiada zgodnie ze wzorem (14.13) smukłość graniczna λgr
H
grR
E2π
λ = (14.14)
Przykładowo, dla stali miękkiej, przyjmując RH = 200 MPa,
E = 2⋅105 MPa, mamy λgr = 100.
Ograniczenie naprężeń krytycznych dopuszcza stosowanie wzoru Eulera
wyłącznie do przypadków, gdy smukłość pręta jest większa od
smukłości granicznej, λ > λgr.

STATECZNOŚĆ PRĘTÓW ŚCISKANYCH
Strona 143143143143
14.2. Niesprężyste wyboczenie pręta
Wyboczenie prętów o smukłości mniejszej od smukłości granicznej ma
charakter niesprężysty i zachodzi przy naprężeniach mniejszych od
naprężeń wynikających ze wzoru Eulera. W zakresie smukłości λ < λgr
stosowane są aproksymacje empiryczne. Jedną z najczęściej stosowa-
nych jest aproksymacja liniowa określona wzorem Tetmajera-Jasińskie-
go (rysunek 14.4)
Rysunek 14.4
Aproksymacja liniowa opisana jest ogólnym wzorem w następującej
formie
λσ bakr −= (14.15)
gdzie a i b są współczynnikami wyznaczanymi doświadczalnie o wartoś-ciach zależnych od właściwości materiału.
W przypadku materiałów, dla których można określić granicę proporcjo-
nalności RH i plastyczności Re stałe a i b wyznaczamy podstawiając do
równania (14.15) warunki brzegowe (por. rysunek 14.4)

ROZDZIAŁ 14
Strona 144144144144
ekr R==0λ
σ oraz Hkr Rgr
==λλ
σ (14.16)
Ostatecznie otrzymujemy uproszczony wzór na naprężenia krytyczne
λλ
σgr
Heekr
RRR
−−= (14.17)
Należy podkreślić, że aproksymacja Tetmajera-Jasińskiego pozwala
jedynie w sposób przybliżony oszacować naprężenia krytyczne w oma-
wianym zakresie smukłości. Wartości naprężeń wyznaczone doświad-
czalnie wskazują na funkcję aproksymacyjną drugiego stopnia zapewnia-
jącą znacznie mniejszy rozrzut wyników.
14.3. Przykłady obliczeń na wyboczenie
1. Pręt stalowy o długości l = 1,5 m utwierdzony na jednym końcu
ściskany jest osiową siłą P (rysunrk 14.5). Zakładając prostokątny
przekrój pręta o wymiarach a = 10 mm, b = 60 mm, obliczyć dopuszczalną siłę Pdop przy której współczynnik bezpieczeństwa wynosi
n = 2.
W obliczeniach przyjąć E = 2⋅105 MPa, RH = 200 MPa.
Ze względu na sposób zamocowana wyboczenie nastąpi w płaszczyźnie
najmniejszej sztywności. Minimalną wartość ma moment bezwładności
przekroju względem osi y
93
10512
)01,0(06,0 −⋅=⋅
=yJ m4
A zatem, płaszczyzna x-z jest płaszczyzną wyboczenia.
Uwzględniając długość wyboczeniową lw = 2l, wyznaczamy smukłość pręta
yJ
Al
i
l2
2==λ

STATECZNOŚĆ PRĘTÓW ŚCISKANYCH
Strona 145145145145
Rysunek 14.5
Po podstawieniu danych liczbowych mamy
1039105
1065,12
9
4
=⋅
⋅⋅=
−
−
λ
Obliczona smukłość λ jest większa od smukłości granicznej λgr = 100.
A zatem, siłę krytyczną wyznaczamy ze wzoru Eulera
10963
1051022
9112
=⋅⋅⋅
=−π
krP N
Dopuszczalna siła ściskająca przy współczynniku bezpieczeństwa n = 2
wynosi
5482
1096==dopP N

ROZDZIAŁ 14
Strona 146146146146
2. Wyznaczyć krytyczną siłę ściskającą stalowy pręt o długości
l = 0,5 m, zamocowany przegubowo na końcach (rysunek 14.6). Przekrój
pręta ma kształt pierścienia o wymiarach średnic zewnętrznej
dz = 20 mm i wewnętrznej dw = 10 mm. W obliczeniach przyjąć E = 2⋅10
5 MPa, RH = 200 MPa, Re = 250 MPa.
Rysunek 14.6
Obliczamy moment bezwładności przekroju względem dowolnej osi
centralnej
( ) ( ) 94444 1036,701,002,06464
−⋅=−=−=ππ
wz ddJ m4
następnie pole powierzchni przekroju
( ) ( ) 42222 1035,201,002,044
−⋅=−=−=ππ
wz ddA m2
Smukłość pręta przy założonym sposobie zamocowania (lw = l) wynosi

STATECZNOŚĆ PRĘTÓW ŚCISKANYCH
Strona 147147147147
3,891036,7
1035,25,0
9
4
=⋅
⋅==
−
−
yJ
Alλ
Smukłość pręta jest mniejsza od smukłości granicznej, λ < λgr = 100.
Wyboczenie ma charakter niesprężysty i w celu wyznaczenia naprężeń
krytycznych stosujemy wzór Tetmajera-Jasińskiego
35,2053,89100
200250250 =
−−=
−−= λ
λσ
gr
Heekr
RRR MPa
A zatem, siła krytyczna wynosi
481035,21035,205 46 =⋅⋅⋅== −AP krkr σ kN

ROZDZIAŁ 14
Strona 148148148148

`
15Podstawy teorii błonowej powłok osiowosymetrycznych

ROZDZIAŁ 15
Strona 150150150150
Powłokami nazywamy elementy przestrzenne ograniczone zakrzywiony-
mi powierzchniami, przy czym odległość między nimi oznacza grubość powłoki. Jeśli promienie krzywizn powierzchni ograniczających są znacznie większe od grubości powłoki, to taka powłoka jest powłoką cienkościenną. Przykładem powłok cienkościennych są ściany różnego
rodzaju zbiorników.
W obliczeniach wytrzymałościowych powłok cienkościennych stosowa-
na jest teoria błonowa, w której pomija się efekt zginania powłoki.
Zgodnie z teorią błonową przyjmuje się następujące założenia:
• grubość powłoki mała w porównaniu z pozostałymi
wymiarami,
• ugięcie powłoki małe w stosunku do grubości,
• naprężenia w przekrojach poprzecznych mają rozkład
równomierny i są równoległe do powierzchni środkowej
powłoki,
• naprężenia w przekrojach równoległych do powierzchni
środkowej są pomijalnie małe.
Weźmy pod uwagę powłokę cienkościenną o grubości δ ograniczoną po-
wierzchniami obrotowymi o wspólnej osi symetrii, tzw. powłokę osio-
wosymetryczną. Załóżmy, że powłoka obciążona jest osiowosymetrycz-
nie siłami równomiernie rozłożonymi, normalnymi do jej powierzchni
środkowej. Takim obciążeniem jest nadciśnienie p. Wytnijmy z powłoki
element ograniczony dwoma bliskimi przekrojami południkowymi
(przekroje przechodzące przez oś symetrii) i dwoma przekrojami prosto-
padłymi do południków (rysunek 15.1). W przekrojach południkowych
o promieniu krzywizny ρ2 występują naprężenia obwodowe σ1, a w prze-
krojach prostopadłych do południków, których promienie krzywizny
oznaczono przez ρ1 – naprężenia południkowe σ2. Składowe naprężenia
σ1 i σ2 są naprężeniami głównymi i określają stan naprężenia w powłoce.

PODSTAWY TEORII BŁONOWEJ POWŁOK OSIOWOSYMETRYCZNYCH
Strona 151151151151
Rysunek 15.1
Na rysunek 15.2 pokazany jest element powłoki oraz jego obciążenie.
Rysunek 15.2

ROZDZIAŁ 15
Strona 152152152152
Analizując równowagę elementu, na podstawie sumy rzutów sił na nor-
malną do powłoki otrzymujemy
02
sin22
sin2 212
121
21 =−+ dspdsd
dsd
dsϕ
δσϕ
δσ (15.1)
gdzie ds1 i ds2 oznaczają długości elementu powłoki odpowiednio w kie-
runku obwodowym i południkowym.
Bardzo małe wymiary elementu uzasadniają następujące zależności mię-dzy kątami środkowymi dϕ1 i dϕ2, a odpowiednimi promieniami
krzywizny ρ1 i ρ2
1
111
222sin
ρ
ϕϕ dsdd==
(15.2)
2
222
222sin
ρ
ϕϕ dsdd==
Podstawiając związki (15.2) do równania równowagi (15.1) po prze-
kształceniach otrzymujemy
δρ
σ
ρ
σ p=+
2
2
1
1 (15.3)
Równanie (15.3), zwane równaniem Laplace’a, ma podstawowe znacze-
nie w teorii powłok cienkościennych i służy do rozwiązywania praktycz-
nych zagadnień wytrzymałościowych. W ogólnym przypadku ze wzglę-du na dwa nieznane naprężenia główne σ1 i σ2 wymagane jest dodatko-
we równanie, którym może być suma sił na kierunek osi powłoki.
15.1. Zbiornik kulisty i zbiornik walcowy
W przypadku zbiornika kulistego (rysunek 15.3) wypełnionego gazem
o nadciśnieniu p do określenia stanu naprężenia w ściance zbiornika
o grubości δ wystarcza równanie (15.3).

PODSTAWY TEORII BŁONOWEJ POWŁOK OSIOWOSYMETRYCZNYCH
Strona 153153153153
Rysunek 15.3
Ze względu na symetrię mamy
σσσ == 21
oraz (15.4)
2
21
D== ρρ
gdzie D jest średnicą powierzchni środkowej zbiornika.
Po podstawieniu związków (15.4) z równania Laplace’a (15.3) wyzna-
czamy naprężenie
δ
σ4
pD= (15.5)
które jednocześnie określa dwuosiowe równomierne rozciąganie ścianki
zbiornika.
Weźmy pod uwagę zbiornik walcowy o średnicy D, grubości ścianek δ i
wewnętrznym nadciśnieniu p, którego fragment przekroju pokazano na
rysunku 15.4.

ROZDZIAŁ 15
Strona 154154154154
Rysunek 15.4
Wyznaczmy naprężenia w części walcowej zbiornika.
Na element ścianki zbiornika działają naprężenia σ1 i σ2. Podstawiając
w równaniu Laplace’a promienie krzywizn 2
1
D=ρ oraz ∞→2ρ ,
wyznaczamy naprężenie obwodowe σ1
δ
σ2
1
pD= (15.6)
Naprężenie wzdłużne σ2 wyznaczamy z warunku równowagi fragmentu
zbiornika przedstawionego na rysunku 14.10. Rzutując wypadkowe siły
na kierunek osi zbiornika otrzymujemy równanie
04
2
2 =− pD
Dπ
σδπ (15.7)
stąd mamy
δ
σ4
2
pD= (15.8)
Porównując obliczone naprężenia główne, stwierdzamy, że naprężenia
obwodowe σ1 są dwukrotnie większe od naprężeń osiowych σ2.

PODSTAWY TEORII BŁONOWEJ POWŁOK OSIOWOSYMETRYCZNYCH
Strona 155155155155
Wyznaczmy naprężenia w stojącym zbiorniku walcowym o średnicy D,
wysokości H i grubości ścianki δ pokazanym na rysunku 15.5. Zbiornik
jest otwarty i wypełniony cieczą o ciężarze właściwym γ.
Rysunek 15.5
Na ścianki zbiornika działa ciśnienie hydrostatyczne, które zgodnie
z przyjętymi oznaczeniami w dowolnej odległości y od podstawy zbior-
nika opisane jest wzorem
)( yHp h −= γ (15.9)
Z równania Laplace’a, uwzględniając promienie krzywizn części walco-
wej zbiornika 2
1
D=ρ oraz ∞→2ρ , wyznaczamy rozkład naprężeń
obwodowych σ1 wzdłuż osi zbiornika
δ
γ
δσ
2
)(
21
DyHDph −== (15.10)
Największe naprężenia obwodowe są w pobliżu dna zbiornika (y = 0)
i wynoszą
δ
γσ
2max1
HD= (15.11)

ROZDZIAŁ 15
Strona 156156156156
W rozważanym przypadku, ze względu na oddziaływanie podłoża
(reakcja R) naprężenia osiowe są równe zeru, σ2 = 0.

`
16 Zmęczenie materiału

ROZDZIAŁ 16
Strona 158158158158
Konstrukcje mechaniczne i elementy maszyn bardzo często poddane są działaniu obciążeń zmiennych, wielokrotnie powtarzających się w czasie
eksploatacji. Obciążeniom tym odpowiadają zmienne naprężenia, które
wywołują w materiale złożone zjawiska i zmiany nazywane zmęczenio-
wymi. Podstawowym skutkiem tych zjawisk jest sukcesywny spadek
wytrzymałości materiału aż do zniszczenia elementu. Stan taki określany
jest zmęczeniem materiału.
Na podstawie doświadczeń i badań mikroskopowych stwierdzono, że
proces zniszczenia zmęczeniowego inicjowany jest w obrębie ziaren.
Lokalny wzrost naprężeń prowadzi do odkształceń ziaren obserwowa-
nych jako pasma poślizgów. Wraz z narastaniem liczby cykli obciążenia
w pasmach poślizgów tworzą się mikroskopowe szczeliny. W wyniku
łączenia się szczelin mikroskopowych powstaje szczelina w skali makro,
która pod wpływem zmiennych obciążeń rozszerza się na większy ob-
szar, doprowadzając do zniszczenia elementu.
W przełomach zmęczeniowych występują dwie strefy o odmiennym
wyglądzie. Pierwszą, nazywaną strefą zniszczenia zmęczeniowego,
charakteryzuje wygląd drobnoziarnisty, wygładzony przez tarcie ścianek
szczeliny o siebie. Druga strefa przełomu, tzw. strefa doraźna o wyglą-dzie bardziej gruboziarnistym powstaje nagle w końcowym okresie pra-
cy elementu, poprzedzającym jego pęknięcie.
Pęknięcia zmęczeniowe rozwijają się szczególnie w obszarach lokalnych
spiętrzeń naprężeń. Miejsca te nazywane są ogniskami pęknięć zmęcze-
niowych i stwarzają potencjalne zagrożenie zniszczenia elementu.
16.1. Cykle zmian naprężenia
Podczas zmiennych obciążeń naprężenia mogą wahać się w dowolny
sposób między krańcowymi wartościami σmax i σmin. W badaniach
zmęczeniowych przyjmuje się, że naprężenia zmieniają się według
harmonicznej funkcji czasu, która w ogólnym przypadku ma postać

ZMĘCZENIE MATERIAŁU
Strona 159159159159
tam ωσσσ sin+= (16.1)
gdzie σa – amplituda naprężenia, σm – wartość średnia naprężenia,
ω - częstość kołowa.
Na rysunku 16.1 pokazano przebieg zmian naprężenia opisany wzorem
(16.1). Cyklem nazywamy zmiany naprężenia między kolejnymi maksy-
malnymi wartościami σmax, w czasie T, który jest okresem cyklu,
T = 2π /ω.
Rysunek 16.1
Największa i najmniejsza wartość naprężenia cyklu wynosi odpowiednio
am σσσ +=max (16.2)
am σσσ −=min (16.3)
Znając ekstremalne wartości naprężeń, można obliczyć naprężenie śred-
nie i amplitudę cyklu ze wzorów
2
minmax σσσ
+=m (16.4)
2
minmax σσσ
−=a (16.5)
Stosunek naprężeń σmin do σmax nazywany jest współczynnikiem asy-
metrii cyklu i oznaczany symbolem r

ROZDZIAŁ 16
Strona 160160160160
max
min
σ
σ=r (16.6)
W badaniach zmęczeniowych duże znaczenie ma cykl wahadłowy
(r = − 1 i σm = 0), pokazany na rysunku 16.2, oraz cykl tętniący
(pulsujący), w którym dla dodatnich wartości naprężeń jest σmin = 0 oraz
r = 0 (rysunek 16.3).
Rysunek 16.2
Rysunek 16.3
W cyklu wahadłowym spełnione są następujące zależności:
aσσσ =−= minmax . W przypadku cyklu tętniącego jest
max5,0 σσσ == am .

ZMĘCZENIE MATERIAŁU
Strona 161161161161
16.2. Podstawowe badania zmęczeniowe
Punktem wyjścia analizy ilościowej zjawiska zmęczenia są ustalone
doświadczalnie właściwości materiału przy zmiennych obciążeniach.
W tym celu przeprowadza się odpowiednie badania na próbkach o znor-
malizowanym kształcie poddanych obciążeniom cyklicznym o stałej
amplitudzie. Podstawową próbą zmęczeniową jest badanie, w którym na
próbkę w postaci pręta o stałym przekroju działa okresowo zmienna siła
osiowa.
Często stosowane jest badanie polegające na czystym zginaniu obraca-
jącej się ze stałą prędkością kątową cylindrycznej próbki, umieszczonej
w uchwytach specjalnej maszyny wytrzymałościowej. Próbka poddana
naprężeniom o określonej amplitudzie σa ulega zniszczeniu po pewnej
liczbie N cykli. Zmieniając kolejno wartości amplitudy naprężenia przy
ustalonej wartości średniej σm, wyznaczane są doświadczalnie odpowia-
dające tym amplitudom liczby cykli do zniszczenia. W ten sposób two-
rzony jest wykres w układzie współrzędnych σa – N, który nazywa się krzywą Wöhlera.
Na rysunku 16.4 przedstawiony jest przykładowy wykres otrzymany dla
próbki stalowej przy cyklu wahadłowym.
Rysunek 16.4
Krzywa wykresu zbliża się asymptotycznie do wartości naprężenia
oznaczonej Zrc. Naprężenie Zrc nazywamy wytrzymałością zmęczeniową

ROZDZIAŁ 16
Strona 162162162162
materiału przy cyklu wahadłowym (rozciąganie – ściskanie). W przypad-
ku stali na podstawie doświadczeń wykazano, że po pewnej granicznej
liczbie cykli NG krzywa Wöhlera zbliża się z dostateczną dokładnością do wartości Zrc. Oznacza to, że osiągnięcie przez próbkę tej liczby cykli
zapewnia jej trwałość. Wartość NG dla stali przyjmowana jest w grani-
cach 5·106 do 107 cykli.
Dla metali nieżelaznych i ich stopów na wykresie Wöhlera nie występuje
pozioma asymptota i jako praktyczną wytrzymałość zmęczeniową przyj-
muje się naprężenie odpowiadające liczbie cykli NG = 2·107 do 5·107.
Ze względu na długotrwałość prób zmęczeniowych stosuje się empirycz-
ne związki odnoszące wytrzymałość zmęczeniową do wytrzymałości
doraźnej Rm. Na przykład dla stali walcowanych i kutych wytrzymałość zmęczeniową przy zginaniu wahadłowym można oszacować na podsta-
wie zależności mrc RZ )6,04,0( ÷≅ .
16.3. Wytrzymałość zmęczeniowa przy cyklach dowolnych
Badania zmęczeniowe w zakresie dowolnych obciążeń są podstawą określenia wpływu naprężenia średniego σm cyklu na wytrzymałość zmęczeniową. Do przedstawienia wyników tego rodzaju badań najczęś-ciej stosuje się wykres Smitha.
Wykres Smitha budowany jest w układzie osi prostokątnych, w którym
na osi poziomej odkładana jest wartość naprężenia średniego σm, a na osi
pionowej – naprężenia ekstremalne σmax i σmin. Uzyskane doświadczalnie
punkty wykresu odpowiadają granicznym wartościom naprężeń
am σσσ +=max i am σσσ −=min , przy których, po umownie przyjętej
liczbie cykli, następuje zniszczenie próbki. Łącząc linią ciągłą szereg
punktów doświadczalnych, otrzymuje się wykres, którego linie górna
i dolna przedstawiają odpowiednio zależność maksymalnego i minimal-
nego naprężenia cyklu od jego wartości średniej. Prosta poprowadzona
przez początek układu współrzędnych, pod kątem 45o jest miejscem
geometrycznym punktów o współrzędnych równych naprężeniu śred-
niemu σm.

ZMĘCZENIE MATERIAŁU
Strona 163163163163
Przykładowy wykres Smitha zbudowany dla dodatnich wartości naprę-żeń σm został pokazany na rysunku 16.5. Prosta poprowadzona przez
początek układu współrzędnych, pod kątem 45o jest miejscem geome-
trycznym punktów o współrzędnych równych naprężeniu średniemu σm.
Zaznaczone na wykresie punkty A i B odpowiadają wytrzymałości
zmęczeniowej przy cyklu wahadłowym Zrc, punkty C i D odnoszą się do
rozciągania tętniącego i naprężenia granicznego Zrj.
Rysunek 16.5
Ze wzrostem wartości naprężenia średniego wzrasta także wytrzymałość zmęczeniowa przy jednoczesnym ograniczeniu wartości amplitudy
cyklu. Dla uproszczenia można przyjąć, że w punkcie K wykresu, gdy
jest σa = 0, naprężenie graniczne ma wartość równą wytrzymałości
doraźnej Rm.

ROZDZIAŁ 16
Strona 164164164164
Ze względu na niebezpieczeństwo pojawienia się odkształceń plastycz-
nych ogranicza się wykres Smitha linią poziomą FH o rzędnej równej
granicy plastyczności Re. Ograniczenie maksymalnych naprężeń jest
podstawą przedstawionej na rysunku 16.5 aproksymacji wykresu linią łamaną AFHGB. Uproszczenie wykresu Smitha wynika z konieczności
zmniejszenia liczby kosztownych i długotrwałych prób zmęczeniowych.
16.4. Czynniki wpływające na wytrzymałość zmęczeniową
Do najważniejszych czynników mających wpływ na obniżenie wytrzy-
małości materiału przy zmiennych naprężeniach należy zaliczyć kształt
elementu i materiał z jakiego jest on wykonany. Szczególnie niebez-
piecznymi obszarami są tzw. karby czyli miejsca wyraźnej zmiany prze-
kroju w postaci otworów, wrębów, odsadzeń itp. Karby wywołują lokal-
ne spiętrzenie naprężeń przewyższające kilkakrotnie naprężenia w odleg-
łych od karbu punktach elementu. Dużą wrażliwość na działanie karbu
wykazują stale stopowe o wysokiej wytrzymałości doraźnej. Mniej wraż-liwe są stale węglowe a szczególnie żeliwo szare.
Przebieg procesu zmęczenia zależy od stanu powierzchni elementu.
Wytrzymałość zmęczeniowa wzrasta, gdy powierzchnia jest bardziej
gładka, bez śladów obróbki mechanicznej. W celu zwiększenia wytrzy-
małości zmęczeniowej obok szlifowania i polerowania stosuje się po-
włoki antykorozyjne. Dobre efekty daje wytwarzanie w warstwie po-
wierzchniowej naprężeń ściskających przez obróbkę mechaniczną (młot-
kowanie, kulkowanie itp.) lub obróbkę cieplną i cieplno-chemiczną.
W ocenie wytrzymałości zmęczeniowej należy uwzględnić wpływ wiel-
kości elementu. Wraz z wymiarami elementu wzrasta prawdopodobień-stwo pęknięcia zmęczeniowego wywołanego defektem struktury a także
wartość uśrednionych naprężeń w obszarach krytycznych, która wynika
z rozkładu naprężeń (np. zginanie, skręcanie). W dużych elementach
mniejszy jest wpływ obróbki powierzchniowej np. zgniotu powierzchni.
Wytrzymałość zmęczeniowa zależy także od właściwości otaczającego
ośrodka. Nadmierna wilgotność i wysoka temperatura wywołują korozję

ZMĘCZENIE MATERIAŁU
Strona 165165165165
elementów stalowych i znacznie obniżają ich odporność na naprężenia
cyklicznie zmienne.

ROZDZIAŁ 16
Strona 166166166166

`
17 Literatura

ROZDZIAŁ 10
Strona 168168168168
5. Brzoska Z., Wytrzymałość materiałów, Warszawa, PWN, 1982.
6. Dyląg Z., Jakubowicz J., Orłoś Z., Wytrzymałość materiałów
tom I, II, Wyd. 1. Warszawa, WNT 1996.
7. Jakubowicz J., Orłoś Z., Wytrzymałość materiałów, Wyd. 6.
Warszawa, WNT 1984.
8. Kurowski R., Niezgodziński M., Wytrzymałość materiałów,
Warszawa, PWN 1961.
9. Lewiński J., Wilczyński A., Witember-Perzyk D., Podstawy
wytrzymałości materiałów, Warszawa, Oficyna Wydawnicza
Politechniki Warszawskiej 1991.
10. Niezgodziński M., Niezgodziński T., Zadania z wytrzymałości
materiałów, Warszawa, WNT 1997.
11. Pyrz R., Tylikowski A., Wytrzymałość materiałów, Wydawnic-
twa Politechniki Warszawskiej 1983.
12. Rżysko J., Statyka i wytrzymałość materiałów, Warszawa, PWN
1971.
13. Zbiór zadań z wytrzymałości materiałów, Praca zbiorowa pod
red. K. Gołosia i J. Osińskiego, Oficyna Wydawnicza
Politechniki Warszawskiej 2001.