Embed Size (px)
Citation preview

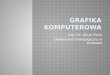
Podstawy mechaniki komputerowej
dr inż. Sławomir Koczubiej
Politechnika ŚwiętokrzyskaWydział Zarządzania i Modelowania KomputerowegoKatedra Informatyki i Matematyki Stosowanej
(18 maja 2016)
Koczubiej Podstawy mechaniki komputerowej 1/188

Informacje ogólne
1 Informacje ogólne
2 Uwagi wstępne
3 Sformułowanie lokalne problemu brzegowego
4 Sformułowanie globalne problemu brzegowego
5 Metoda różnic skończonych
6 Wprowadzenie do metody elementów skończonych
7 Etapy procedury MES
8 Funkcje kształtu
9 Analiza statyczna MES pręta
10 Belkowy element skończony
11 Elementy w 2D
12 Ramowy element skończony
Koczubiej Podstawy mechaniki komputerowej 2/188

Informacje ogólne
Kontakt
Budynek C, pokój [email protected]
Strona przedmiotu, materiały do pobrania
http://kis.tu.kielce.pl
Materiały do pobrania, aktualności, terminy zaliczeń
http://tu.kielce.pl/∼sk
Koczubiej Podstawy mechaniki komputerowej 3/188

Informacje ogólne
Organizacja wykładów
Wykłady są obowiązkowe (zgodnie z postanowieniami regulaminu), ale...
Obecność na wykładach może nie być kontrolowana.
Na wykłady czasem warto zajrzeć.
Warunki zaliczenia wykładu
Test zaliczeniowy po zakończeniu wykładów.
Koczubiej Podstawy mechaniki komputerowej 4/188

Informacje ogólne
Organizacja laboratoriów
Zajęcia laboratoryjne są obowiązkowe.
Dopuszcza się jedną nieobecność.
Większa liczba nieobecności powoduje zmniejszenie oceny do niedostatecznejwłącznie (3 lub więcej nieobecności).
W przypadku usprawiedliwionej nieobecności zajęcia można odrobić z innągrupą (jeśli istnieje taka możliwość).
Warunki zaliczenia laboratoriów
Wykonanie ćwiczeń i raportów z zadanych przykładów obliczeń komputerowych.
Koczubiej Podstawy mechaniki komputerowej 5/188

Informacje ogólne
Treść wykładów
Podstawowe pojęcia i definicje, sformułowanie lokalne i globalne problemubrzegowego.
Metoda różnic skończonych dla równań różniczkowych zwyczajnych.
Wprowadzenie do metody elementów skończonych, etapy procedury MES.
Rozwiązanie MES problemu pręta rozciąganego, prętowy element skończony.
Rozwiązanie MES problemu belki zginanej, belkowy element skończony.
Rozwiązanie MES kratownicy, prętowy element skończony 2D.
Koczubiej Podstawy mechaniki komputerowej 6/188

Informacje ogólne
Treść laboratoriów
Wprowadzenie do systemu Mathcad, obliczenia wektorowe i macierzowe wsystemie Mathcad.
Rozwiązanie problemu brzegowego metodą MRS sformułowanego lokalnie.
Rozwiązanie statyczne pręta metodą MES.
Rozwiązanie statyczne belki metodą MES.
Rozwiązanie statyczne kratownicy metodą MES.
Wprowadzenie do programu ABAQUS, analiza statyczna kratownicy.
Analiza statyczna tarczy w systemie ABAQUS.
Analiza statyczna płyty w systemie ABAQUS.
Koczubiej Podstawy mechaniki komputerowej 7/188

Informacje ogólne
Literatura
Cichoń C. Metody obliczeniowe. Wybrane zagadnienia. WydawnictwoPolitechniki Świętokrzyskiej, Kielce 2005.
Rakowski G., Kacprzyk Z. Metoda elementów skończonych w mechanicekonstrukcji. Wydawnictwo Politechniki Warszawskiej, Warszawa 1993.
Cichoń C, Cecot W, Krok J, Pluciński P. Metody komputerowe w liniowejmechanice konstrukcji. Wydawnictwo Politechniki Krakowskiej, Kraków 2010.
Jankowscy M. i J. Przegląd metod i algorytmów numerycznych, cz. 1.Wydawnictwo WNT, Warszawa 1988.
Dryja M., Jankowscy M. i J. Przegląd metod i algorytmów numerycznych,cz. 2. Wydawnictwo WNT, Warszawa 1988.
Koczubiej Podstawy mechaniki komputerowej 8/188

Uwagi wstępne
1 Informacje ogólne
2 Uwagi wstępne
3 Sformułowanie lokalne problemu brzegowego
4 Sformułowanie globalne problemu brzegowego
5 Metoda różnic skończonych
6 Wprowadzenie do metody elementów skończonych
7 Etapy procedury MES
8 Funkcje kształtu
9 Analiza statyczna MES pręta
10 Belkowy element skończony
11 Elementy w 2D
12 Ramowy element skończony
Koczubiej Podstawy mechaniki komputerowej 9/188

Uwagi wstępne
Mechanika komputerowa
Jest sposobem opisu problemów mechaniki ciała stałego lub mechanikipłynów (części fizyki), w których zwraca się szczególną uwagę na takieformułowanie problemu i jego rozwiązanie, aby w maksymalnym stopniuwykorzystać możliwości komputera. Spowodowało to koniecznościprzeformułowania klasycznych metod rozwiązania (metoda Galerkina przetworzonaw metodę elementów skończonych) bądź opracowania nowych metodnumerycznych (metoda Newtona rozwinięta w metodę Newtona-Raphsona).
Mechanika komputerowa najczęściej wiązana jest z pakietami CAE (ComputerAided Engineering). Są to programy wykorzystujące zaawansowane metodykomputerowe, umożliwiające modelowanie szeregu zjawisk fizycznych,zachodzących w układach o zróżnicowanym stopniu złożoności – począwszy odprostych brył, skończywszy na kompletnych zespołach części.
Koczubiej Podstawy mechaniki komputerowej 10/188

Uwagi wstępne
Programy te umożliwiają symulację kinematyki lub dynamiki układu, analizęprzepływu ciepła i masy, naprężeń i innych cech projektowanego wyrobu. Pozwalato na znaczne przyspieszenie procesu projektowania i przede wszystkim naobniżenie kosztów projektowania. Do tej grupy oprogramowania należą m. in.Abaqus, ADINA, ANSYS, NX Nastran, FEMAP.
Koczubiej Podstawy mechaniki komputerowej 11/188

Uwagi wstępne
Metody komputerowe
Metody rozwiązań przybliżonych, wykorzystywane w mechanice komputerowej.W formułowaniu tych metod korzysta się w dużym stopniu z zaawansowanegoaparatu matematycznego (metody wariacyjne, analiza funkcjonalna) co pozwalarozwiązywać skomplikowane zagadnienia i dowodzić zbieżności ich rozwiązania.Wśród metod komputerowych można wymienić metodę elementówskończonych (MES), metodę elementów brzegowych (MEB), uogólnionąmetodę różnic skończonych (UMRS) czy bezelementową metodę Galerkina(BMG).
Termin metoda komputerowa często jest używana jako nazwa procesuprojektowania lub analizy konstrukcji z wykorzystaniem metod obliczeńprzybliżonych, zaimplementowanych do komputera w formie programównapisanych w różnych językach programowania.
Koczubiej Podstawy mechaniki komputerowej 12/188

Uwagi wstępne
metodykomputerowe
MES, MEB,MRS
modelmatematyczny
obiektrzeczywisty
modelnumeryczny
rozwiązaniedyskretne
SW
SG
SL
idealizacja dyskretyzacja rozwiązanie
błąd rozwiązania
błąd rozwiązania i dyskretyzacji
błąd rozwiązania i modelowania
Rys. 1: Schemat komputerowej analizy konstrukcji
Koczubiej Podstawy mechaniki komputerowej 13/188

Uwagi wstępne
Symulacja komputerowa obliczeń składa się z czterech etapów. W etapiepierwszym ma miejsce idealizacja obiektu rzeczywistego poprzez przyjecieuzasadnionych założeń upraszczających oraz wyspecyfikowanie zmiennych najlepiejopisujących obiekt (model fizyczny). Założenia dotyczą przede wszystkimgeometrii obiektu, materiału którego jest wykonany, obciążeń i przyszłychwarunków użytkowania (warunków środowiskowych i okresu planowanejeksploatacji obiektu). Na tej podstawie budowany jest model matematycznyobiektu.
Drugim etapem jest dyskretyzacja, przetwarzająca ciągły model matematyczny,na ogół w postaci układów równań różniczkowych, lub pewnego funkcjonału,w model numeryczny w formie układów równań algebraicznych.
Koczubiej Podstawy mechaniki komputerowej 14/188

Uwagi wstępne
Trzecim etapem symulacji komputerowej jest rozwiązanie, czyli napisaniestosownego programu komputerowego, przetestowanie i wykonanie obliczeń.
I w końcu najważniejszy — czwarty etap, jakim jest weryfikacja wynikówobliczeń. Możliwości popełnienia błędów jest wiele, mogą one wystąpić na każdymz trzech pierwszych etapów. W rezultacie poprawiania tych błędów powinniśmyw końcu otrzymać rozwiązanie optymalne.
Koczubiej Podstawy mechaniki komputerowej 15/188

Uwagi wstępne
Modelem matematycznym mogą być odpowiednio sformułowane problemybrzegowe (lub początkowo brzegowe) dla równań różniczkowych (zwyczajnych lubcząstkowych) lub pewne funkcjonały podlegające minimalizacji.
Pierwszy przypadek to sformułowanie lokalne (SL), drugi natomiast tosformułowanie globalne problemu (SG). W budowie komputerowej metodyanalizy konstrukcji preferowane jest sformułowanie globalne.
Trudność jednakże polega na tym, że nie wszystkie problemy, a tylko tzw.problemy samosprzężone możemy równoważnie opisać w sformułowaniu lokalnymlub globalnym. Przykładem problemu samosprzężonego jest liniowy problemteorii sprężystości (LPTS) opisany 15. równaniami różniczkowo-algebraicznymize stosownymi warunkami brzegowymi lub pewnym funkcjonałem.
Koczubiej Podstawy mechaniki komputerowej 16/188

Uwagi wstępne
Funkcjonałem w LPTS będzie funkcjonał całkowitej energii potencjalnejukładu.
Jeśli rozważany problem w sformułowaniu lokalnym nie jest problememsamosprzężonym, można budować równanie całkowe wykorzystując metodywariacyjne (SW).
Należy zauważyć, że klasyczna metoda różnic skończonych (MRS) jestwykorzystywana do bezpośredniego rozwiązywania problemów sformułowanychlokalnie.
Metody komputerowe z matematycznego punktu widzenia są pewnymiprocedurami rozwiązań, dostosowanymi do możliwości obliczeniowych, jakiepowstały wraz z rozwojem komputerów i technik informatycznych.
Koczubiej Podstawy mechaniki komputerowej 17/188

Sformułowanie lokalne problemu brzegowego
1 Informacje ogólne
2 Uwagi wstępne
3 Sformułowanie lokalne problemu brzegowego
4 Sformułowanie globalne problemu brzegowego
5 Metoda różnic skończonych
6 Wprowadzenie do metody elementów skończonych
7 Etapy procedury MES
8 Funkcje kształtu
9 Analiza statyczna MES pręta
10 Belkowy element skończony
11 Elementy w 2D
12 Ramowy element skończony
Koczubiej Podstawy mechaniki komputerowej 18/188

Sformułowanie lokalne problemu brzegowego
Rozważmy pręt o powierzchni przekroju poprzecznego A(x) i długości L. Prętzrobiony jest z materiału o module Younga E . Pręt jest obciążony obciążeniemciągłym działającym wzdłuż osi pręta o intensywności q(x) i siłą skupioną P .
L
Px
q(x)
E A(x)
Rys. 2: Pręt rozciągany
Tak zdefiniowany problem może być uznany za problem jednowymiarowy, jeśliwymiary przekroju poprzecznego pręta są małe w stosunku do jego długości, copozwala przyjąć, że naprężenia po wysokości pręta są pomijalnie małe w stosunkudo naprężeń wzdłuż pręta.
Koczubiej Podstawy mechaniki komputerowej 19/188

Sformułowanie lokalne problemu brzegowego
Równanie różniczkowe, będące modelem matematycznym problemu prętarozciąganego, otrzymamy rozważając nieskończenie mały element dx pręta.
N(x)+dN(x)N(x)
A(x+dx)A(x)x
dx
q(x)
Rys. 3: Element dx pręta
N(x) i N(x) + dN(x) są siłami normalnymi działającymi w przekrojach A(x)i A(x + dx). Korzystając z warunku równowagi możemy zapisać
−N(x) + N(x) + dN(x) + q(x)dx = 0. (1)
Zatem, nasze równanie będzie miało postać
dN(x)
dx+ q(x) = 0, (2)
0 < x < L.
Koczubiej Podstawy mechaniki komputerowej 20/188

Sformułowanie lokalne problemu brzegowego
Siłę normalną (podłużną) stanowi suma naprężeń normalnych na całymprzekroju. Jeśli naprężenia są stałe w przekroju pręta, to możemy je określićz zależności
σx(x) =N(x)
A(x), (3)
i następnieN(x) = σx(x)A(x). (4)
Koczubiej Podstawy mechaniki komputerowej 21/188

Sformułowanie lokalne problemu brzegowego
Wykorzystując równanie fizyczne (konstytutywne, Hooke’a) określające zależnośćodkształcenia od naprężenia
σx(x) = Eεx(x), (5)
i równanie geometryczne (Cauchy’ego) wiążące ze zobą przemieszczeniai odkształcenia
εx(x) =du(x)dx, (6)
będziemy mogli napisać
N(x) = EA(x)du(x)dx. (7)
Koczubiej Podstawy mechaniki komputerowej 22/188

Sformułowanie lokalne problemu brzegowego
Wykorzystując zależność
N(x) = EA(x)du(x)dx, (8)
będziemy mogli zapisać równanie różniczkowe w formie
ddx
(EA(x)
du(x)dx
)+ q(x) = 0, (9)
0 < x < L,
lub jeśli EA = const.
EAd2u(x)dx2
+ q(x) = 0, (10)
0 < x < L.
Koczubiej Podstawy mechaniki komputerowej 23/188

Sformułowanie lokalne problemu brzegowego
Do rozwiązania takiego równania różniczkowego potrzebne jest jeszczesformułowanie warunków brzegowych na brzegach pręta.
Równanie jest drugiego rzędu, zatem wymagane są dwa warunki brzegowe,ustalające wartość przemieszczenia u lub siły P . Jednoznaczność rozwiązaniawymaga, aby warunki brzegowy podane były na dwóch różnych brzegach.
u(x = 0) = 0, (11)
N(x = L) = EAdudx
∣∣∣∣x=L
= P ⇒ EAdudx
∣∣∣∣x=L
= P . (12)
Pierwszy warunek dla funkcji u nazywany jest podstawowym (kinematycznym)
warunekiem brzegowym, natomiast drugi, dla pochodnej funkcjidudxjest nazywany
naturalnym (statycznym) warunkiem brzegowym.
Koczubiej Podstawy mechaniki komputerowej 24/188

Sformułowanie lokalne problemu brzegowego
Ostatecznie model matematyczny problemu pręta rozciąganego będzie miałpostać
ddx
(EA(x)
du(x)dx
)+ q(x) = 0, (13)
0 < x < L,
u(x = 0) = 0, (14)
N(x = L) = EAdudx
∣∣∣∣x=L
= P . (15)
Koczubiej Podstawy mechaniki komputerowej 25/188

Sformułowanie lokalne problemu brzegowego
Równanie różniczkowe można zapisać w tzw. formie operatorowej
Au = f , (16)
gdzie
A ≡ ddx
(A(x)E
ddx
), (17)
jest liniowym operatorem różniczkowym oraz f ≡ −q(x).Taki zapis pozwala na ujednolicenie równań różniczkowych będących modelamimatematycznymi różnych problemów fizycznych.
Jeśli u(x) = T (x) będzie temperaturą w pręcie, E = k będzie współczynnikiemprzewodzenia cieplnego materiału, a f (x) = −Q(x) będzie ciepłem wytwarzanymlub dostarczanym przez brzeg, to podane równanie będzie modelemmatematycznym problemu stacjonarnego przepływu ciepła.
Koczubiej Podstawy mechaniki komputerowej 26/188

Sformułowanie globalne problemu brzegowego
1 Informacje ogólne
2 Uwagi wstępne
3 Sformułowanie lokalne problemu brzegowego
4 Sformułowanie globalne problemu brzegowego
5 Metoda różnic skończonych
6 Wprowadzenie do metody elementów skończonych
7 Etapy procedury MES
8 Funkcje kształtu
9 Analiza statyczna MES pręta
10 Belkowy element skończony
11 Elementy w 2D
12 Ramowy element skończony
Koczubiej Podstawy mechaniki komputerowej 27/188

Sformułowanie globalne problemu brzegowego
Poprzednie równania problemu brzegowego sformułowaliśmy analizując stanrównowagi w punkcie materialnym ciała. W efekcie otrzymaliśmy równanieróżniczkowe. Taki sposób budowania modeli matematycznych uzasadnia nazwęsformułowanie lokalne problemu.
Innym sposobem jest sformułowanie globalne, w którym rozwiązanieotrzymujemy w wyniku minimalizacji pewnego funkcjonału.
W analizie zagadnień mechaniki ciała sprężystego takim funkcjonałem jestcałkowita energia potencjalna.
Problem, którego rozwiązanie można otrzymać rozwiązując równanie różniczkowelub minimalizując odpowiedni funkcjonał, nazywa się problememsamosprzężonym.
Koczubiej Podstawy mechaniki komputerowej 28/188

Sformułowanie globalne problemu brzegowego
Każde ciało pod działaniem sił zewnętrznych doznaje deformacji, na których siłyobciążające wykonują pewną pracę L. Praca ta w przypadku adiabatycznegoprocesu termodynamicznego (takiego, podczas którego izolowany układ nienawiązuje wymiany ciepła, lecz całość energii jest dostarczana lub odbieranaz niego jako praca, nie zachodzi dyssypacja energii) jest niezależna od sposobu jejwykonania i równa się przyrostowi energii wewnętrznej układu W , czyli takiejfunkcji, której przyrost jest równy pracy dostarczonej układowi
L = W . (18)
Równość ta wynika z I prawa termodynamiki dla procesów adiabatycznych.
Takie cechy są charakterystyczne dla układów sprężystych.
Koczubiej Podstawy mechaniki komputerowej 29/188

Sformułowanie globalne problemu brzegowego
Można dowieść, że w przypadku ciała sprężystego i obciążeń statycznych energiawewnętrzna układu jest jest równa energii potencjalnej, która równa się pracy siłwewnętrznych na odkształceniach przez nie wywołanych i nazywana jest energiąsprężystą układu U .
W = U . (19)
Energia sprężysta
Podsumowując, dla ciał sprężystych i procesu adiabatycznego energia sprężysta Uto praca sił wewnętrznych na odkształceniach przez nie wywołanych.
Energia ta jest odwracalna, co oznacza, że po usunięciu sił obciążających zużywasię na odzyskanie początkowej konfiguracji ciała i w nie naprężonym i nieodkształconym stanie jest równa zeru.
Koczubiej Podstawy mechaniki komputerowej 30/188

Sformułowanie globalne problemu brzegowego
Energię sprężystą można zapisać w formie
U =
∫V
Φ dV . (20)
gdzie Φ jest energią sprężystą właściwą (gęstością energii sprężystej) i dla ciałaHooke’a wynosi
w zapisie wskaźnikowym
Φ =12σijεij , (21)
w zapisie macierzowym
Φ =12σTε. (22)
Koczubiej Podstawy mechaniki komputerowej 31/188

Sformułowanie globalne problemu brzegowego
x y
z
t
Su
St g
Rys. 4: Ciało
Na rysunku oznaczono:
V – objętość ciała,
S – brzeg ciała ze zdefiniowanymiwarunkami brzegowymi,
g – wektor intensywności sił objętościowych,
t – wektor intensywności siłpowierzchniowych.
Całkowita energia potencjalna ciała sprężystego będzie zatem równa
Π = U − L, (23)
Π =12
∫V
σijεij dV − 12∫V
giui dV − 12∫S
tiui dS , (24)
lub
Π =12
∫V
σTε dV − 12
∫V
uTg dV − 12
∫S
uTt dS . (25)
Koczubiej Podstawy mechaniki komputerowej 32/188

Sformułowanie globalne problemu brzegowego
L
Px
q(x)
E A(x)
Rys. 5: Pręt rozciągany
W przypadku sformułowania globalnego pręta rozciąganego, musimy wyznaczyćcałkowitą energię potencjalną pręta Π
Π = U − Lq − LP , (26)
gdzie U jest energią sprężysta pręta, Lq jest pracą obciążenia ciągłego a LP topraca obciążenia skupionego.
Koczubiej Podstawy mechaniki komputerowej 33/188

Sformułowanie globalne problemu brzegowego
Energia sprężysta wynosi
U =12
∫V
σε dv , (27)
wykorzystując dodatkowo
dv = A(x) dx , (28)
σx(x) = Eεx(x), (29)
εx(x) =du(x)dx, (30)
możemy napisać
U =12
∫L
EA(x)ε2(x) dx =12
∫L
EA(x)
(du(x)dx
)2dx . (31)
Dla EA = const. będziemy mogli napisać
U =12EA
∫L
(du(x)dx
)2dx . (32)
Koczubiej Podstawy mechaniki komputerowej 34/188

Sformułowanie globalne problemu brzegowego
Praca obciążenia ciągłego wynosi
Lq =
∫L
q(x)u(x) dx , (33)
a praca obciążenia skupionego na końcu pręta
LP = Pu(L). (34)
Ostatecznie, całkowita energia potencjalna pręta wynosi
Π = U − Lq − LP =12EA
∫L
(du(x)dx
)2dx −
∫L
q(x)u(x)dx − Pu(L). (35)
Rozwiązaniem tak sformułowanego zadania będzie taka funkcja przemieszczeniau(x), dla której energia potencjalna Π osiągnie minimum.
Spostrzeżenie: zależność na energię potencjalną Π nie zawiera drugiej pochodnej
funkcji przemieszczeńd2udx2, równanie różniczkowe zawierało!
Koczubiej Podstawy mechaniki komputerowej 35/188

Metoda różnic skończonych
1 Informacje ogólne
2 Uwagi wstępne
3 Sformułowanie lokalne problemu brzegowego
4 Sformułowanie globalne problemu brzegowego
5 Metoda różnic skończonych
6 Wprowadzenie do metody elementów skończonych
7 Etapy procedury MES
8 Funkcje kształtu
9 Analiza statyczna MES pręta
10 Belkowy element skończony
11 Elementy w 2D
12 Ramowy element skończony
Koczubiej Podstawy mechaniki komputerowej 36/188

Metoda różnic skończonych
Co to jest MRS?
Metoda różnic skończonych (MRS) jest przybliżoną metodą dyskretnegorozwiązywania problemów brzegowych, opisywanych zwyczajnymi lub cząstkowymirównaniami różniczkowymi.
Idea metody polega na zamianie operatorów różniczkowych na odpowiednieoperatory różnicowe (ilorazy różnicowe), określone na dyskretnym i regularnymzbiorze punktów, zwanych siatką.
Koczubiej Podstawy mechaniki komputerowej 37/188

Metoda różnic skończonych
Operatory różniczkowe:ddx
(•), ddy
(•), ∂∂x
(•), ∂∂y
(•);
równanie różniczkowe I rzędu
ddx
f (x) = 2x2 − 4x + 3, (36)
d2
dx2(•), d
2
dy2(•), d
2
dxdy(•);
równanie różniczkowe II rzędu
d2
dx2f (x) = 2x2 − 4x + 3, (37)
problem pręta rozciąganego
EAd2u(x)dx2
+ q(x) = 0, (38)
Koczubiej Podstawy mechaniki komputerowej 38/188

Metoda różnic skończonych
∂2
∂x2(•), ∂
2
∂y2(•), ∂
2
∂x∂y(•), ∇2(•) ≡ ∂
2
∂x2(•) + ∂
2
∂y2(•);
przepływ ciepła w obszarze dwuwymiarowym
∂2T
∂x2+∂2T
∂y2= −Q
k, (39)
∇2T = −Qk, (40)
tarcza ⎧⎪⎪⎨⎪⎪⎩
(∂2
∂x2+1− ν2∂2
∂y2
)u +1+ ν2∂2v
∂x∂y= 0,(
∂2
∂y2+1− ν2∂2
∂x2
)v +1+ ν2∂2u
∂x∂y= 0,
(41)
Koczubiej Podstawy mechaniki komputerowej 39/188

Metoda różnic skończonych
d4
dx4,d4
dy4,∂4
∂x4,∂4
∂y4,
∇4(•) = ∇2(∇2(•)) ≡ ∂4
∂x4(•) + 2 ∂
2
∂x2(•) ∂
2
∂y2(•) + ∂
4
∂y4(•);
płyta
∂4w
∂x4+ 2∂2w
∂x2∂2w
∂y2+∂4w
∂y4= − q
D, (42)
∇4w = − q
D. (43)
Koczubiej Podstawy mechaniki komputerowej 40/188

Metoda różnic skończonych
Metodę różnic skończonych zastosujemy do rozwiązania równania
d2udx2
= f (x , y) (44)
W pierwszym kroku zamienimy operatory różniczkowe na odpowiednie operatoryróżnicowe, wykorzystamy szereg Taylora dla funkcji u(x , y) w otoczeniuu(x + h, y) i u(x − h, y)
u(x + h, y) = u(x , y) +du(x , y)dx
h +12d2u(x , y)dx2
h2 +16d3u(x , y)dx3
h3 + . . . , (45)
u(x − h, y) = u(x , y)− du(x , y)dx
h +12d2u(x , y)dx2
h2 − 16d3u(x , y)dx3
h3 + . . . . (46)
Koczubiej Podstawy mechaniki komputerowej 41/188

Metoda różnic skończonych
Odejmując stronami i pomijając wyrazy z h2 i wyższe otrzymamy
du(x , y)dx
≈ 12h
[u(x + h, y)− u(x − h, y)]. (47)
Powyższą zależność nazywa się wzorem różnicowym centralnym pierwszegorzędu.
W przypadku sumowania stronami rozwinięć w szereg Taylora i po pominięciwyrazów z h3 i wyższych, otrzymamy
d2u(x , y)dx2
≈ 1h2
[u(x + h, y)− 2u(x , y) + u(x − h, y)]. (48)
Powyższe zależności nazywają się wzorami różnicowymi drugiego rzędu.
Koczubiej Podstawy mechaniki komputerowej 42/188

Metoda różnic skończonych
Podstawiając wzory różnicowe do wyjściowego równania, otrzymamy
u(x + h, y) − 2u(x , y) + u(x − h, y) = f (x , y), (49)
lubu(xi+1, yj)− 2u(xi , yj) + u(xi−1, yj) = f (xi , yj). (50)
Na rysunku poniżej znajduje się punkty występujące we wzorach różnicowych,tworzące tzw. gwiazdę różnicową.
h h(x, y)
(x+h, y)(x-h, y)
Rys. 6: Gwiazda różnicowa dla węzła (x , y)
Koczubiej Podstawy mechaniki komputerowej 43/188

Metoda różnic skończonych
Dla dowolnej funkcji u(x) wyróżnijmy trzy punkty xi−1, xi i xi+1
ui
ui+1
i-1
ui-1
i
u(x)
i+1 x
y
Rys. 7: Funkcja u(x)
dla których funkcja osiąga wartości ui−1, ui i ui+1.Koczubiej Podstawy mechaniki komputerowej 44/188

Metoda różnic skończonych
ui
ui+1
i-1
ui-1
i
u(x)
i+1 x
y
Poprowadźmy 3 sieczne, i obliczmy wartość pierwszejpochodnej w punkcie i w sposób przybliżony jako tangenskąta nachylenia siecznej do krzywej (zamiast tangensastycznej do krzywej). Jego wartość dla siecznejprzechodzącej przez punkty xx−1 i xx+1 wynosi
du(x)dx
∣∣∣∣x=xi
≡ u′i ≈ui+1 − ui−1xi+1 − xi−1
=ui+1 − ui−12h
. (51)
Z rysunku możemy wywnioskować, że wartość pierwszej pochodnej możemyotrzymać jako tangens kąta nachylenia dwóch innych siecznych przechodzącychprzez xi i xi+1 oraz xi−1 i xi
du(x)dx
∣∣∣∣x=xi
≡ u′i ≈ui+1 − uixi+1 − xi
=ui+1 − ui
h– iloraz różnicowy w przód, (52)
du(x)dx
∣∣∣∣x=xi
≡ u′i ≈ui − ui−1xi − xi−1
=ui − ui−1
h– iloraz różnicowy wstecz. (53)
Koczubiej Podstawy mechaniki komputerowej 45/188

Metoda różnic skończonych
ui
ui+1
i-1
ui-1
i
u(x)
i+1 x
y
Aby obliczyć wartość drugiej pochodnej w punkcie i ,policzmy najpierw pierwszą pochodną w punktach a i b,to jest w środkach obydwu odcinków h
u′a ≈ui − ui−1xi − xi−1
=ui − ui−1
h, (54)
u′b ≈ui+1 − uixi+1 − xi
=ui+1 − ui
h. (55)
Wykorzystując powyższe zależności możemy napisać
d2u(x)dx2
∣∣∣∣∣x=xi
≡ u′′i ≈u′b − u′i
h=
ui−1 − 2ui + ui+1h2
. (56)
Koczubiej Podstawy mechaniki komputerowej 46/188

Metoda różnic skończonych
Ilorazy różnicowe można przedstawiać w formie graficznej:ddx
(•), ddy
(•), ∂∂x
(•), ∂∂y
(•);
iloraz centralny
h/2
h h
-1 1
iloraz w przód
1/h
h h
-1 1
iloraz wstecz
1/h
h h
-1 1
Koczubiej Podstawy mechaniki komputerowej 47/188

Metoda różnic skończonych
d2
dx2(•), d
2
dy2(•), ∂
2
∂x2(•), ∂
2
∂y2(•);
1/h2
h h
1 -2 1
∇2(•);
1/h2
h h
1 -4 1
1
1
h
h
Koczubiej Podstawy mechaniki komputerowej 48/188

Metoda różnic skończonych
∇4(•);
1/h4
h h
-8
2
2
1 20 -8 1
2
2
-8
-8
h h
1
1
h
h
h
h
Koczubiej Podstawy mechaniki komputerowej 49/188

Metoda różnic skończonych
Zastosujmy wyprowadzone wzory różnicowe do rozwiązania zagadnienia deformacjipręta obciążonego obciążeniem o liniowym rozkładzie działającym wzdłuż osipręta.
xL
q(x)
E A
Rys. 8: Problem deformacji pręta
Przyjmując dane:
sztywność pręta EA = 1,
obciążenie q(x) = x ,
długość pręta L = 1,
będziemy mogli zdefiniować równanie różniczkowe zagadnienia,
Koczubiej Podstawy mechaniki komputerowej 50/188

Metoda różnic skończonych
które uprości się do postaci
d2u(x)dx2
= −x , (57)
0 < x < L,
z warunkami brzegowymi w postaci
u(x = 0) = 0,du(x)dx
∣∣∣∣x=L
= 0, (58)
lub krótkou′′(x) = −x , u(0) = 0, u′(1) = 0. (59)
Koczubiej Podstawy mechaniki komputerowej 51/188

Metoda różnic skończonych
Do dalszych obliczeń, przyjmijmy siatkę 6-węzłową, zatem odległość międzywęzłami wynosi h = 0, 2.
xx1=0
u1=u(0)=0 u'6=u'(1)=0
x2=0,2 x3=0,4 x4=0,6 x5=0,8 x6=1u1 u2 u3 u4 u5 u6
uq1=0 q2=0,2 q3=0,4 q4=0,6 q5=0,8 q6=1
1 2 3 4 5 6
Rys. 9: Siatka MRS
Koczubiej Podstawy mechaniki komputerowej 52/188

Metoda różnic skończonych
Zapiszmy układ równań MRS
węzeł 1: u1 = 0, podstawowy warunek brzegowy,
węzeł 2:u1 − 2u2 + u3
(0, 2)2= −0, 2, iloraz różnicowy centralny,
węzeł 3:u2 − 2u3 + u4
(0, 2)2= −0, 4, iloraz różnicowy centralny,
węzeł 4:u3 − 2u4 + u5
(0, 2)2= −0, 6, iloraz różnicowy centralny,
węzeł 5:u4 − 2u5 + u6
(0, 2)2= −0, 8, iloraz różnicowy centralny,
węzeł 6:u6 − u50, 2
= 0, naturalny warunek brzegowy, iloraz różnicowy
wstecz.
Koczubiej Podstawy mechaniki komputerowej 53/188

Metoda różnic skończonych
Po prostych przekształceniach otrzymamy układ równań
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎣
1 0 0 0 0 0
1 −2 1 0 0 0
0 1 −2 1 0 0
0 0 1 −2 1 0
0 0 0 1 −2 10 0 0 0 1 1
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎦
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎣
u1
u2
u3
u4
u5
u6
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎦=
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
0
− 1125
− 2125
− 3125
− 41250
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
, (60)
a jego rozwiązanie wynosi
u1 = 0, u2 =55750, u3 =
104750, u4 =
156750, u5 =
180750, u6 =
180750. (61)
Koczubiej Podstawy mechaniki komputerowej 54/188

Metoda różnic skończonych
u
udokładne
uMRS
iloraz wstecz
uMRS
iloraz centralny
00
0,2
0,1
0,2
0,3
0,4 0,6 0,8 1 x
Rys. 10: Przemieszczenia pręta
Błąd względny (maksymalny) dla przemieszczenia w węźle 6 jest dość dużyi wynosi 27,6%. Wynika to z faktu, że do dyskretyzacji naturalnego warunkubrzegowego zastosowano iloraz róznicowy wstecz. Aby poprawić sytuację, należyużyć ilorazu różnicowego centralnego.
Koczubiej Podstawy mechaniki komputerowej 55/188

Metoda różnic skończonych
Rozwiążmy problem zginania cienkiej płyty, obciążonej obciążeniem równomiernierozłożonym q.
w=0
C D
BA
y
x∂2w/∂x2=0
w=0∂w/∂x=0
Rys. 11: Problem zginania płyty
Koczubiej Podstawy mechaniki komputerowej 56/188

Metoda różnic skończonych
Modelem matematycznym jest równanie eliptyczne IV rzędu
∇4w(x , y) = −q(x , y)D, (62)
gdzie sztywność płytowa D wynosi
D = Et3
12 (1− ν2) , (63)
a t jest grubością płyty.
Na brzegach AB i CD płyta jest zamocowana, a na brzegach AC i BD jestswobodnie podparta. Zatem warunki brzegowe będą wyglądały następująco:
brzeg AB i CD, w = 0,∂w
∂x= 0,
brzeg AC i BD, w = 0,∂2w
∂2x= 0.
Koczubiej Podstawy mechaniki komputerowej 57/188

Metoda różnic skończonych
y
x
1w0 w0 w0 w0 w0
w0 w1 w2 w1 w0
w0 w3 w4 w3 w0
w0
w8
w7 w1 w2 w1 w0
w0 w0 w0
w5 w6
w0 w0
2 3 4 5
6 7 8 9 10
11 12 13 14 15
16 17 18 19 20
21 22 23 24 25
Rys. 12: Siatka MRS
Przyjmijmy następujące dane:
wymiary płyty: 100× 100m,grubość płyty: t = 1 m,
moduł Younga:E = 1, 092 · 1010 N/m2,współczynnik Poissona:ν = 0, 3,
obciążenie: q = 1 · 103 N/m2.
Koczubiej Podstawy mechaniki komputerowej 58/188

Metoda różnic skończonych
Uwzględniając podwójną symetrię zadania, układ równań MRS możemy napisaćnastępująco
w7 + w5 + w1 + w1 + 2 (w0 + w0 + w0 + w4)− 8(w0 + w0 + w2 + w3)+
+20w1 = −qh4
D, (64)
w0 + w6 + w0 + w2 + 2 (w0 + w0 + w3 + w3)− 8(w1 + w0 + w1 + w4)+
+20w2 = −qh4
D, (65)
w8 + w0 + w3 + w0 + 2 (w0 + w2 + w2 + w0)− 8(w0 + w1 + w4 + w1)+
+20w3 = −qh4
D, (66)
w0 + w0 + w0 + w0 + 2 (w1 + w1 + w1 + w1)− 8(w2 + w3 + w2 + w3)+
+20w4 = −qh4
D, (67)
Koczubiej Podstawy mechaniki komputerowej 59/188

Metoda różnic skończonych
Z warunków brzegowych:
brzeg AC
∂2w
∂x2=
w7 − 2w0 + w1h2
= 0⇒ w7 = −w1, (68)
∂2w
∂x2=
w8 − 2w0 + w3h2
= 0⇒ w8 = −w3 (69)
brzeg CD
∂w
∂x=
w5 − w12h
= 0⇒ w5 = w1, (70)
∂w
∂x=
w6 − w22h
= 0⇒ w6 = w2 (71)
Koczubiej Podstawy mechaniki komputerowej 60/188

Metoda różnic skończonych
W zwartej formie układ równań można zapisać⎡⎢⎢⎣22 −8 −8 2−16 22 4 −8−16 4 20 −88 −16 −16 20
⎤⎥⎥⎦⎡⎢⎢⎣
w1w2w3w4
⎤⎥⎥⎦ = −qh
4
D
⎡⎢⎢⎣1111
⎤⎥⎥⎦ , (72)
po rozwiązaniu otrzymamy⎡⎢⎢⎣
w1w2w3w4
⎤⎥⎥⎦ = −qh
4
D
⎡⎢⎢⎣0, 30840, 41450, 46630, 6313
⎤⎥⎥⎦ =
⎡⎢⎢⎣−0, 1205−0, 1619−0, 1821−0, 2466
⎤⎥⎥⎦ . (73)
Koczubiej Podstawy mechaniki komputerowej 61/188

Metoda różnic skończonych
00
25
25
50
50
75
75
100
100
-0,05-0,1-0,15
-0,2
0
y
x
0 2550
75100
025
5075
100
-0,05
-0,1
-0,15
-0,2
0
yx
Rys. 13: Przemieszczenia płyty zginanej
Koczubiej Podstawy mechaniki komputerowej 62/188

Metoda różnic skończonych
Podsumowanie:
łatwa interpretacja modelu dyskretnego MRS oraz duża skutecznośćw przypadku regularnego obszarów regularnych i regularnej siatki węzłów,
możliwości korzystania z modelu lokalnego i globalnego, nie ma potrzebykonstruowania modelu wariacyjnego,
trudność w zastosowaniu w obszarach o dowolnym kształcie, zwłaszcza gdybrzeg obszaru jest krzywoliniowy,
brak możliwości lokalnego zagęszczania siatki, celem uzyskania możliwienajlepszego rozwiązania, przy najmniejszej liczbie stopni swobody;
trudność w łączeniu obszarów o różnych wymiarach, np. belki (1D) z płytą(2D),
trudność w uwzględnianiu niejednorodności typu matematycznego (różnesformułowania matematyczne w podobszarach), czy fizycznego (różnymateriał w podobszarach) oraz obciążeń typu skupionego, przyłożonychw dowolnych punktach obszaru.
Koczubiej Podstawy mechaniki komputerowej 63/188

Wprowadzenie do metody elementów skończonych
1 Informacje ogólne
2 Uwagi wstępne
3 Sformułowanie lokalne problemu brzegowego
4 Sformułowanie globalne problemu brzegowego
5 Metoda różnic skończonych
6 Wprowadzenie do metody elementów skończonych
7 Etapy procedury MES
8 Funkcje kształtu
9 Analiza statyczna MES pręta
10 Belkowy element skończony
11 Elementy w 2D
12 Ramowy element skończony
Koczubiej Podstawy mechaniki komputerowej 64/188

Wprowadzenie do metody elementów skończonych
Metoda elementów skończonych (MES) jest pewną procedurą wariacyjnąrozwiązywania równań różniczkowych, w której funkcje aproksymacyjne sąwyznaczane w obszarze zastąpionym przez zbiór prostych podobszarów(elementów skończonych), na jakie obszar ten został podzielony. Funkcjeaproksymacyjne są wielomianami algebraicznymi, wyznaczonymi według zasadaproksymacji interpolacyjnej.
Co to jest MES dla inżyniera?
MES jest numeryczną metodą obliczeniową, pozwalającą na znalezienie w sposóbprzybliżony i dyskretny funkcji rozwiązujących problem brzegowy. W przypadkuinteresujących nas zadań liniowej teorii sprężystości (mechanika ciała stałego),szukaną funkcją będą przemieszczenia, zatem będziemy mogli wyznaczyć równieżodkształcenia i naprężenia. Podstawową zaletą metody jest możliwość uzyskiwaniawyników dla skomplikowanych kształtów, dla których niemożliwe jestprzeprowadzenie obliczeń analitycznych.
Koczubiej Podstawy mechaniki komputerowej 65/188

Wprowadzenie do metody elementów skończonych
Co wiemy o liczbie π?
wynosi w przybliżeniu π ≈ 3, 1415 . . .,wyraża iloraz obwodu okręgu i jego średnicy,
ma święto 14 marca (03.14).
Jak obliczyć wartość liczby π?
Rys. 14: Pomysł Archimedesa (250 BC)
Średnia arytmetyczna z obwodu wielokątów wpisanego i opisanego na okręguodniesiona do średnicy okręgu. Wykonał obliczenia dla wielokąta o 96 bokach.Otrzymał wynik π ∈ (3 1071 ; 3 17)⇒ π ≈ 3, 1418 . . .Koczubiej Podstawy mechaniki komputerowej 66/188

Wprowadzenie do metody elementów skończonych
Metoda podobna, choć troszkę nowsza.
1
2
3 4
5
6r
d r
i
ln
j2
Rys. 15: Dzielenie okręgu na n części (dyskretyzacja)
Możemy napisać
l ≈ n · ln, (74)
2α =3600
n⇒ α =
3600
2n, (75)
sin(α) =1/2lnr⇒ ln = 2r sin(α), (76)
π =l
d=
l
2r,⇒ π ≈ n · ln
2r=
n · 2r sin(α)2r
= n sin(α). (77)
Koczubiej Podstawy mechaniki komputerowej 67/188

Wprowadzenie do metody elementów skończonych
Policzmy
n = 1, α = 1800, sin(α) = 0, π ≈ 0,n = 2, α = 900, sin(α) = 1, π ≈ 2,
n = 3, α = 600, sin(α) =
√32, π ≈ 3 ·
√32
= 2, 5981,
n = 4, α = 450, sin(α) =
√22, π ≈ 4 ·
√22
= 2, 8284, (78)
. . .
Tabela 1: Kolejne przybliżenia wartości liczby π
n π n π1 0,000000000000000 64 3,140331156954753
2 2,000000000000000 128 3,141277250932773
4 2,828427124746190 256 3,141513801144301
8 3,061467458920718 512 3,141572940367091
16 3,121445152258052 1024 3,141591421511200
32 3,136548490545939 2048 3,141592345570118
Koczubiej Podstawy mechaniki komputerowej 68/188

Wprowadzenie do metody elementów skończonych
Co ma MES do π?
MES = dyskretyzacja + aproksymacja (interpolacja)
Postępowanie MES dla problemów mechaniki:
dzielimy konstrukcję na proste fragmenty, które nazwiemy elementamiskończonymi, elementy skończone są połączone ze sobą we wspólnychw węzłach,
formułujemy zagadnienie dla każdego elementu skończonego, czyliw przypadku mechaniki określamy równania równowagi rozwiązaniaprzybliżonego (zależności pomiędzy naprężeniami lub siłami uogólnionymia przemieszczeniami w węzłach),
składamy elementy skończone i rozwiązujemy całe zagadnienieuwzględniając warunki zgodności przemieszczeń w węzłach, warunkirównowagi, warunki brzegowe, w wyniku tego wyznaczamy przemieszczeniaw węzłach,
dla każdego elementu skończonego, znając jego przemieszczenia, obliczamysiły, odkształcenia, naprężenia działające w elemencie.
Koczubiej Podstawy mechaniki komputerowej 69/188

Wprowadzenie do metody elementów skończonych
Obiektrzeczywisty
Modelobliczeniowy
IdealizacjaDyskretyzacja
Rys. 16: Idealizacja i dyskretyzacja konstrukcji
Koczubiej Podstawy mechaniki komputerowej 70/188

Wprowadzenie do metody elementów skończonych
Uwaga!
Dla potrzeb zrozumienia podstawowych etapów procedury MES, znalezieniapewnych cech charakterystycznych ilustrujących metodę MES i zdefiniowaniapewnych pojęć związanych z MES, tymczasowo potraktujemy metodę jakosposób bezpośredniego budowania równań równowagi konstrukcji, przezrozważenie równowagi pewnych podobszarów, a następnie ich złożenie w jeden,globalny układ równań równowagi.
Koczubiej Podstawy mechaniki komputerowej 71/188

Wprowadzenie do metody elementów skończonych
Przykładem najprostszego elementu skończonego może być sprężyna o sztywnościk .
x
jie
uiue ueke ujFiFe FeFj
Rys. 17: Najprostszy element skończony
Podstawowe parametry elementu skończonego:
węzły: i , j (oznaczenie lokalne, związane z elementem skończonym),
sztywność: ke,
przemieszczenia w węzłach: uei , uej (oznaczenie lokalne),
siły w węzłach: F ei , Fej (oznaczenie lokalne).
Koczubiej Podstawy mechaniki komputerowej 72/188

Wprowadzenie do metody elementów skończonych
Związek siły z przemieszczeniem możemy napisać w postaci
F e = ke ·Δue, (79)
Δue = uej − uei . (80)
Korzystając z warunku równowagi, możemy napisać
F ei + F ej = 0⇒ F ej = −F ei = F e, (81)
i dla każdego z dwóch węzłów
F ei = −F e = −ke (uej − uei)= ke · uei − ke · uej , (82)
F ej = F e = ke(uej − uei
)= −ke · uei + ke · uej . (83)
Zapiszmy ten układ w postaci macierzowej[ke −ke−ke ke
] [ueiuej
]=
[F eiF ej
]. (84)
Koczubiej Podstawy mechaniki komputerowej 73/188

Wprowadzenie do metody elementów skończonych
Po oznaczeniu
Ke ≡[
ke −ke−ke ke
], (85)
ue ≡[
ueiuej
], (86)
Fe ≡[
F eiF ej
], (87)
układ równań będzie miał formę
Keue = Fe, (88)
gdzie:
Ke – macierz sztywności elementu skończonego,
ue – wektor przemieszczeń elementu skończonego,
Fe – wektor sił węzłowych elementu (obciążenie, reakcje).
Koczubiej Podstawy mechaniki komputerowej 74/188

Wprowadzenie do metody elementów skończonych
Ke =[
ke −ke−ke ke
], (89)
Spostrzeżenia:
macierz sztywności Ke jest symetryczna Ke = (Ke)T,
policzmy wyznacznik macierzy sztywności
|Ke| = ke · ke − (−ke)(−ke) = (ke)2 − (ke)2 = 0, (90)
Co to oznacza? Czy możemy rozwiązać równania? Jaka jest interpretacja fizyczna?
Warto zaznaczyć, że wystarczy podać tylko jeden warunek brzegowy dlaprzemieszczenia ue, żeby rozwiązać równania.
Jeżeli uei = 0 (zamocowaliśmy koniec i sprężyny), to uej =
F e
ke.
Koczubiej Podstawy mechaniki komputerowej 75/188

Wprowadzenie do metody elementów skończonych
Rozważmy układ dwóch sprężyn
x
2
2 2
31
1 1
1 2
u1u1 u2u1k1 k2
F1F 1 F2F 1u1u2
F1F 2
u2F2 u3
F3u1F1
u2u2
F2F 2
Rys. 18: Dyskretyzacja układu dwóch sprężyn
Dla każdego elementu skończonego, możemy napisać układ równań równowagi(używany oznaczeń lokalnych)[
k1 −k1−k1 k1
] [u11u12
]=
[F 11F 12
], (91)[
k2 −k2−k2 k2
] [u21u22
]=
[F 21F 22
]. (92)
Koczubiej Podstawy mechaniki komputerowej 76/188

Wprowadzenie do metody elementów skończonych
W każdym węźle oznaczmy przemieszczenia (korzystamy z warunku zgodnościprzemieszczeń w węźle 2)
u1 = u11 , (93)
u2 = u12 = u21 , (94)
u3 = u22 , (95)
i siły, korzystając z warunku równowagi
F1 = F 11 , (96)
F2 = F 12 + F 21 , (97)
F3 = F 22 , (98)
co prowadzi do zależności
F1 = k1u1 − k1u2, (99)
F2 = −k1u1 + k1u2 + k2u2 − k2u3, (100)
F3 = −k2u2 + k2u3. (101)
Koczubiej Podstawy mechaniki komputerowej 77/188

Wprowadzenie do metody elementów skończonych
Po przekształceniu otrzymamy
F1 = k1u1 − k1u2, (102)
F2 = −k1u1 +(k1 + k2
)u2 − k2u3, (103)
F3 = −k2u2 + k2u3. (104)
Wykorzystując powyższe równania, równania równowagi dla elementówskończonych w zapisie macierzowym będą miały postać⎡
⎣ k1 −k1 0−k1 k1 + k2 −k20 −k2 k2
⎤⎦⎡⎣ u1 ≡ u11
u2 ≡ u12 = u21u3 ≡ u22
⎤⎦ =
⎡⎣ F1 ≡ F 11
F2 ≡ F 12 + F 21F3 ≡ F 22
⎤⎦ , (105)
lub krótkoKu = F, (106)
gdzie:
K – globalna macierz sztywności,
u – globalny wektor przemieszczenia,
F – globalny wektor sił węzłowych.
Koczubiej Podstawy mechaniki komputerowej 78/188

Wprowadzenie do metody elementów skończonych
Zapiszmy wkład równań równowagi dla elementu skończonego, rozszerzającmacierze i wektory w taki sposób, aby zawierały wszystkie globalneprzemieszczenia ⎡
⎣ k1 −k1 0−k1 k1 00 0 0
⎤⎦⎡⎣ u1
u2u3
⎤⎦ =
⎡⎣ F 11
F 120
⎤⎦ , (107)
⎧⎪⎨⎪⎩
k1u1 − k1u2 + 0 · u3 = F 11
−k1u1 + k1u2 + 0 · u3 = F 120 · u1 + 0 · u2 + 0 · u3 = 0
, (108)
i w podobny sposób dla drugiego elementu skończonego⎡⎣ 0 0 00 k2 −k20 −k2 k2
⎤⎦⎡⎣ u1
u2u3
⎤⎦ =
⎡⎣ 0F 21
F 22
⎤⎦ . (109)
Koczubiej Podstawy mechaniki komputerowej 79/188

Wprowadzenie do metody elementów skończonych
Po dodaniu układów otrzymamy⎛⎝⎡⎣ k1 −k1 0−k1 k1 00 0 0
⎤⎦ +
⎡⎣ 0 0 00 k2 −k20 −k2 k2
⎤⎦⎞⎠⎡⎣ u1
u2u3
⎤⎦ =
⎡⎣ F 11
F 120
⎤⎦+
⎡⎣ 0F 21
F 22
⎤⎦ ,(110)
czyli taki sam wynik jak poprzednio.
Powyższa operacja składania lokalnych (dla pojedynczych elementówskończonych) układów równań równowagi do jednego globalnego (dla wszystkichelementów skończonych) układu równań równowagi nazywa się agregacją.
Koczubiej Podstawy mechaniki komputerowej 80/188

Wprowadzenie do metody elementów skończonych
Należy zwrócić szczególna uwagę na sposób numerowania węzłów, który istotniewpływa na wynikowe równania równowagi.
Jeśli ponumerujemy węzły jak na rysunku
x
23 11 2k1 k2
u1 F1 u2 F2u3 F3
Rys. 19: Inna numeracja węzłów
nowe macierze sztywności i nowy układ równań będą miały postać
K1 =
⎡⎣ k1 0 −k1
0 0 0−k1 0 k1
⎤⎦ , K2 =
⎡⎣ k2 −k2 0−k2 k2 00 0 0
⎤⎦ , (111)
⎡⎣ k1 + k2 −k2 −k1−k2 k2 0−k1 0 k1
⎤⎦⎡⎣ u3
u1u2
⎤⎦ =
⎡⎣ F3
F1F2
⎤⎦ . (112)
Koczubiej Podstawy mechaniki komputerowej 81/188

Wprowadzenie do metody elementów skończonych
Rozwiążmy układ dwóch sprężyn, z zamocowaną sprężyną 1 i obciążony dwiemasiłami P .
2 31
x
1 2k1 k2
u2 F2 u3 F3
PP
u1 F1
Rys. 20: Układ dwóch sprężyn
Rozszerzone układy równań równowagi MES dla poszczególnych sprężyn będąmiały postać ⎡
⎣ k1 −k1 0−k1 k1 00 0 0
⎤⎦⎡⎣ u1
u2u3
⎤⎦ =
⎡⎣ F 11
F 120
⎤⎦ , (113)
⎡⎣ 0 0 00 k2 −k20 −k2 k2
⎤⎦⎡⎣ u1
u2u3
⎤⎦ =
⎡⎣ 0F 21
F 22
⎤⎦ . (114)
Koczubiej Podstawy mechaniki komputerowej 82/188

Wprowadzenie do metody elementów skończonych
Po agregacji układ równań dla układu sprężyn można zapisać w postaci⎡⎣ k1 −k1 0−k1 k1 + k2 −k20 −k2 k2
⎤⎦⎡⎣ u1 ≡ 0
u2u3
⎤⎦ =
⎡⎣ F1
F2 ≡ PF3 ≡ P
⎤⎦ , (115)
⎧⎪⎨⎪⎩
k1 · 0− k1u2 + 0 · u3 = F1
−k1 · 0+ (k1 + k2)u2 − k2u3 = P
0 · 0− k2u2 + k2u3 = P
. (116)
Układ równań zawierający tylko zmienne pierwotne będzie miał postać[k1 + k2 −k2−k2 k2
] [u2u3
]=
[PP
], (117)
{(k1 + k2)u2 − k2u3 = P
−k2u2 + k2u3 = P. (118)
Koczubiej Podstawy mechaniki komputerowej 83/188

Wprowadzenie do metody elementów skończonych
Po pewnych przekształceniach otrzymamy{k1u2 = 2P
−k2u2 + k2u3 = P. (119)
i dodatkowo−k1u2 = F1. (120)
Rozwiązanie układu wynosi
u2 =2Pk1, u3 =
2Pk1
+P
k2, F1 = −2P . (121)
Koczubiej Podstawy mechaniki komputerowej 84/188

Wprowadzenie do metody elementów skończonych
Rozważmy układ trzech sprężyn.
2 311 2 3k1 k2 k3
Px
4
u2 F2 u3 F3 u4 F4u1 F1
Rys. 21: Układ trzech sprężyn
Przyjmijmy następującedane:
sztywności sprężyn:k1 = 100 N/mm,k2 = 200 N/mm,k3 = 100 N/mm,
siła P = 500 N.
Macierze sztywności elementów będą wynosiły odpowiednio
K1 =[100 −100−100 100
], K2 =
[200 −200−200 200
], K3 =
[100 −100−100 100
],
(122)a globalna macierz sztywności
K =
⎡⎢⎢⎣100 −100 0 0−100 100+ 200 −200 00 −200 200+ 100 −1000 0 −100 100
⎤⎥⎥⎦ . (123)
Koczubiej Podstawy mechaniki komputerowej 85/188

Wprowadzenie do metody elementów skończonych
Globalny układ równań MES⎡⎢⎢⎣100 −100 0 0−100 300 −200 00 −200 300 −1000 0 −100 100
⎤⎥⎥⎦⎡⎢⎢⎣
u1 ≡ 0u2u3u4 ≡ 0
⎤⎥⎥⎦ =
⎡⎢⎢⎣
F1F2 ≡ 0F3 ≡ 500F4
⎤⎥⎥⎦ . (124)
Układ równań zawierające tylko zmienne pierwotne będzie wynosił[300 −200−200 300
] [u2u3
]=
[0500
], (125)
i dodatkowo {−100u2 = F1
−100u3 = F4. (126)
Koczubiej Podstawy mechaniki komputerowej 86/188

Wprowadzenie do metody elementów skończonych
Rozwiązanie układu wynosi
u2 = 2 mm, u3 = 3 mm, F1 = −200 N F4 = −300 N. (127)
xu2=2 mm u3=3 mm
F4=-300 NF3=500 NF1=-200 N
Rys. 22: Przemieszczenia i reakcje
Sprawdźmy poprawność obliczonych reakcji:
P + F1 + F4 = 0⇒ 500− 200− 300 = 0. (128)
Jakie wartości osiągają siły F 21 i F22 działające na sprężynę 2:
K2u2 = F2, (129)[k2 −k2−k2 k2
] [u2 ≡ u21u3 ≡ u22
]=
[F 21F 22
], (130)[
200 −200−200 200
] [23
]=
[F 21F 22
]⇒[
F 21F 22
]=
[ −200200
]. (131)
Koczubiej Podstawy mechaniki komputerowej 87/188

Wprowadzenie do metody elementów skończonych
Procedura agregacji raz jeszcze.
3
4
5
1
x1
2 3
4
k1
k2 k3
k4
P2 ∆u
P1
2
2
Rys. 23: Układ czterech sprężyn
Zbudujmy macierz topologii łączącą lokalne numery węzłów elementówskończonych i i j z globalnymi numerami węzłów.
Tabela 2: Macierz topologii
Element Węzeł i = 1 Węzeł j = 21 4 22 2 33 3 54 2 1
Koczubiej Podstawy mechaniki komputerowej 88/188

Wprowadzenie do metody elementów skończonych
Element Węzeł i = 1 Węzeł j = 21 4 22 2 33 3 54 2 1
Macierze sztywności poszczególnych elementów wynoszą
4 2
K1 =42
[k1 −k1−k1 k1
]12,
1 2
3 5
K3 =35
[k3 −k3−k3 k3
]12,
1 2
2 3
K2 =23
[k2 −k2−k2 k2
]12, (132)
1 2
2 1
K4 =21
[k4 −k4−k4 k4
]12. (133)
1 2
Koczubiej Podstawy mechaniki komputerowej 89/188

Wprowadzenie do metody elementów skończonych
4 2
K1 =42
[k1 −k1−k1 k1
]12,
1 2
3 5
K3 =35
[k3 −k3−k3 k3
]12,
1 2
2 3
K2 =23
[k2 −k2−k2 k2
]12, (134)
1 2
2 1
K4 =21
[k4 −k4−k4 k4
]12. (135)
1 2Zagregowana macierz sztywności będzie miała postać
1 2 3 4 5
K =
12345
⎡⎢⎢⎢⎢⎣
k4 −k4 0 0 0−k4 k1 + k2 + k4 −k2 −k1 00 −k2 k2 + k3 0 −k30 −k1 0 k1 00 0 −k3 0 k3
⎤⎥⎥⎥⎥⎦ . (136)
Koczubiej Podstawy mechaniki komputerowej 90/188

Wprowadzenie do metody elementów skończonych
3
4
5
1
x1
2 3
4
k1
k2 k3
k4
P2 ∆u
P1
2
2
Końcowy, globalny układ równań⎡⎢⎢⎢⎢⎣
k4 −k4 0 0 0−k4 k1 + k2 + k4 −k2 −k1 00 −k2 k2 + k3 0 −k30 −k1 0 k1 00 0 −k3 0 k3
⎤⎥⎥⎥⎥⎦
⎡⎢⎢⎢⎢⎣
U1U2U3U4 ≡ 0U5 ≡ Δu
⎤⎥⎥⎥⎥⎦ =
⎡⎢⎢⎢⎢⎣
F1 ≡ P1F2 ≡ 0F3 ≡ −P2F4F5
⎤⎥⎥⎥⎥⎦ .(137)
Koczubiej Podstawy mechaniki komputerowej 91/188

Etapy procedury MES
1 Informacje ogólne
2 Uwagi wstępne
3 Sformułowanie lokalne problemu brzegowego
4 Sformułowanie globalne problemu brzegowego
5 Metoda różnic skończonych
6 Wprowadzenie do metody elementów skończonych
7 Etapy procedury MES
8 Funkcje kształtu
9 Analiza statyczna MES pręta
10 Belkowy element skończony
11 Elementy w 2D
12 Ramowy element skończony
Koczubiej Podstawy mechaniki komputerowej 92/188

Etapy procedury MES
Dyskretyzujemyobszar
2 31 1 2
Obliczamy macierze sztywnościelementów (interpolacja)
k1
K1u1=F1 K2u2=F2k2
P
Agregujemy, uwzględniamy warunkibrzegowe, rozwiązujemy równania
KU=FK1 K2
P
Wyznaczamy siły (naprężenia)w elementach skończonych
K1u1=F1 K2u2=F2
K1 u1 K2 u2
Rys. 24: Etapy procedury MES
Koczubiej Podstawy mechaniki komputerowej 93/188

Etapy procedury MES
Rozwiązanie typowego problemu metodą elementów skończonych jest realizowanew następujących etapach:
dyskretyzacja (podział obszaru na podobszary), wynikiem której jestzastąpienie obszaru zbiorem elementów skończonych; liczba, kształt i typelementu zależą od rozwiązywanego problemu; w tym etapie ustala się liczbęelementów skończonych, liczbę i współrzędne węzłów oraz tablicę topologii(incydencji),
wyznaczenie równań MES dla elementów; sformułowanie równania;aproksymacja nieznanych funkcji w elementach,
agregacja (złożenie) elementów, czyli budowa układu równań przywykorzystaniu warunku zgodności zmiennych węzłowych oznaczającego, żewartości tych zmiennych we wspólnym węźle są takie same; otrzymujemyukład równań MES całego problemu,
uwzględnienie naturalnych i podstawowych warunków brzegowych, czyliwprowadzenie ich do zagregowanego układu równań,
rozwiązanie równań ze względu na niewiadome węzłowe,
obliczenie dodatkowych wielkości, czyli obliczenie wartości funkcjirozwiązania i ich pochodnych, w innych niż węzły punktach obszaru.
Koczubiej Podstawy mechaniki komputerowej 94/188

Etapy procedury MES
Inne typy elementów skończonych.
Rys. 25: Przykłady elementów skończonych
Koczubiej Podstawy mechaniki komputerowej 95/188

Funkcje kształtu
1 Informacje ogólne
2 Uwagi wstępne
3 Sformułowanie lokalne problemu brzegowego
4 Sformułowanie globalne problemu brzegowego
5 Metoda różnic skończonych
6 Wprowadzenie do metody elementów skończonych
7 Etapy procedury MES
8 Funkcje kształtu
9 Analiza statyczna MES pręta
10 Belkowy element skończony
11 Elementy w 2D
12 Ramowy element skończony
Koczubiej Podstawy mechaniki komputerowej 96/188

Funkcje kształtu
Po rozwiązaniu równań MES, otrzymamy wartości szukanych przemieszczeń (lubinnych niewiadomych) w węzłach.
L0x
u
21
u1
u2
u(L/2)=?
Rys. 26: Przemieszczenie w środku elementu skończonego
Jak wyznaczyć przemieszczenie (lub inną niewiadomą) w środku elementuskończonego?
możemy zwiększyć liczbę elementów skończonych, tak aby w interesującymmiejscu znalazł się węzeł,możemy założyć jakiś sposób zmiany interesującego nas przemieszczeniaw elemencie i opisać go funkcją (aproksymacja, interpolacja).
Koczubiej Podstawy mechaniki komputerowej 97/188

Funkcje kształtu
L x
u
u1
u2
u(L/2)=?
0
Rys. 27: Interpolacja liniowa
W drugim przypadku, najprostszą funkcją może być funkcja liniowa w postaciu(x) = ax + b. Dla elementu o długości L, musi spełniać następujące warunki:
na początku elementu skończonego, czyli dla x = 0 musi mieć wartość u1
u(0) = a · 0+ b = u1, (138)
na końcu elementu skończonego, dla x = L musi mieć wartość u2
u(L) = a · L+ b = u2. (139)
Koczubiej Podstawy mechaniki komputerowej 98/188

Funkcje kształtu
Powyższe równania pozwolą nam wyznaczyć nieznane współczynniki a i b, którewynoszą
a =u2 − u1
L, (140)
b = u1, (141)
funkcja opisująca wartość przemieszczenia w elemencie będzie miała postać
u(x) =u2 − u1
Lx + u1. (142)
Spostrzeżenia:
łatwo obliczyć takie funkcje,
każdy element będzie miał inną funkcję aproksymacyjną,
jeśli element będzie miał jeszcze jakieś inne stopnie swobody (np.przemieszczenia w innych płaszczyznach, kąty obrotu) to trzeba wyznaczyćfunkcję dla każdego stopnia swobody,
współczynnik a nie ma fizycznej interpretacji.
Koczubiej Podstawy mechaniki komputerowej 99/188

Funkcje kształtu
Czy można inaczej (lepiej)?
Przekształćmy naszą funkcję
u(x) =u2 − u1
Lx + u1 =
u2Lx − u1
Lx + u1 = u1
(1− 1
Lx
)+ u2
(1Lx
), (143)
po oznaczeniuN1(x) = 1− x
L, N2(x) =
x
L, (144)
będziemy mogli napisać
u(x) = N1(x)u1 + N2(x)u2. (145)
Funkcja u(x) teraz jest kombinacją liniową wyrażeń N1(x), N2(x) i przemieszczeńw węzłach u1 i u2.
Koczubiej Podstawy mechaniki komputerowej 100/188

Funkcje kształtu
Sprawdźmy własności wyrażeń N1(x) i N2(x) w węzłach:
dla x = 0
N1(0) = 1− 0L= 1, N2(0) =
0L= 0, (146)
dla x = L
N1(L) = 1− L
L= 1− 1 = 0, N2(L) =
L
L= 1. (147)
L0 x
1 1
N1(x) N2(x)
u
Rys. 28: Funkcje N1(x) i N2(x)
Koczubiej Podstawy mechaniki komputerowej 101/188

Funkcje kształtu
Otrzymane funkcje N1(x) i N2(x) są liniowymi funkcjami interpolacyjnymiLagrange’a. W MES funkcje interpolacyjne noszą nazwę funkcji kształtu.
Stosuje się też inne rodzaje funkcji interpolacyjnych, np. Hermita, Serendipa.
L x
u1
u2
N1(x)u1N2(x)u2
u
0
Rys. 29: Interpolacja liniowa Lagrange’a w elemencie dwuwęzłowym
Koczubiej Podstawy mechaniki komputerowej 102/188

Funkcje kształtu
Ogólną postać interpolacji Lagrange’a można napisać w formie
un(x) =n∑
i=0
Nn,i(x)ui = Nn,0(x)u0+Nn,1(x)u1+Nn,2(x)u2+. . .+Nn,n(x)un, (148)
gdzie n określa stopień wielomianu interpolacyjnego, a i to numer funkcji.
Spostrzeżenia:
otrzymana forma funkcji u(x) ma przejrzystą strukturę, składa sięz podobnych części,
każda część to iloczyn przemieszczenia w węźle ui (wartość, która mainterpretację fizyczny) i funkcji kształtu Ni(x),
wartość funkcji kształtu Ni (x) przedstawia wkład przemieszczenia ui dowartości przemieszczenia u(x) wewnątrz elementu,
funkcje Ni (x) będą takie same dla wszystkich elementów tego samego typu(zależą tylko od jego długości)
funkcje Ni (x) będą takie same dla każdego stopnia swobody.
Koczubiej Podstawy mechaniki komputerowej 103/188

Funkcje kształtu
Funkcje interpolacyjne Lagrange’a (funkcje bazowe Lagrange’a) mają postaćogólną
Nn,i(x) =n∏
j=0j �=i
x − xjxi − xj
=(x − x0)(x − x1) . . . (x − xi−1)(x − xx+1) . . . (x − xn)
(xi − x0)(xi − x1) . . . (xi − xi−1)(xi − xi+1) . . . (xi − xn),
(149)
2 2 31 1x x
uu
Rys. 30: Interpolacja Lagrange’a dla elementów dwu- i trzywęzłowych
Koczubiej Podstawy mechaniki komputerowej 104/188

Funkcje kształtu
x
u
Rys. 31: Aproksymacja liniowymi funkcjami kształtu
Spostrzeżenia:
używanie elementów skończonych z taką interpolacją funkcji przemieszczeniapowoduje zastąpienie realnego rozkładu linią łamaną,
w ten sposób można przybliżyć każdą funkcję ciągła z dowolną dokładnością,
im więcej elementów, tym lepiej.
Koczubiej Podstawy mechaniki komputerowej 105/188

Analiza statyczna MES pręta
1 Informacje ogólne
2 Uwagi wstępne
3 Sformułowanie lokalne problemu brzegowego
4 Sformułowanie globalne problemu brzegowego
5 Metoda różnic skończonych
6 Wprowadzenie do metody elementów skończonych
7 Etapy procedury MES
8 Funkcje kształtu
9 Analiza statyczna MES pręta
10 Belkowy element skończony
11 Elementy w 2D
12 Ramowy element skończony
Koczubiej Podstawy mechaniki komputerowej 106/188

Analiza statyczna MES pręta
Wspomnieliśmy, że metoda MES jest wariacyjną metodą rozwiązywania równańróżniczkowych. Metody wariacyjne pozwalają na szukanie rozwiązania równaniaróżniczkowego budując ważone równania całkowe, które w naturalny sposóbtworzą bazę dla otrzymania rozwiązań przybliżonych. Podstawowym modelembędzie sformułowanie lokalne w postaci równania różniczkowego.
Wśród metod wariacyjnych możemy wyróżnić metodę Rayleigha-Ritza, lubmetody residuów ważonych np. kollokacji, najmniejszych kwadratów,Bubnowa-Galerkina.
Problem liniowej teorii sprężystości jest problemem samosprzężonym. W takimprzypadku nie musimy budować równania całkowego wykorzystując metodywariacyjne. Wygodniej będzie skorzystać ze sformułowania równoważnegopodejściu wariacyjnemu, jakim będzie minimalizacja pewnego funkcjonału.
Takim funkcjonałem, jak już wcześniej wspomniano, jest funkcjonał całkowitejenergii potencjalnej.
Koczubiej Podstawy mechaniki komputerowej 107/188

Analiza statyczna MES pręta
Obliczmy całkowitą energię potencjalną sprężyny Π
x
kP
F u
RF
Rys. 32: Odkształcona sprężyna
Π = U − L, (150)
i dalej
U =12Fu =
12ku2, (151)
L = Pu, (152)
zatem
Π(u) =12ku2 − Pu. (153)
Koczubiej Podstawy mechaniki komputerowej 108/188

Analiza statyczna MES pręta
Zasada minimum energii potencjalnej (twierdzenie Lagrange’a) mówi, że każdyukład fizyczny dąży do osiągnięcia stanu o minimalnej energii potencjalnej. Takipunkt będzie stanem równowagi.
U
WΠ
u
U, W
u=P/k
Rys. 33: Minimum energii potencjalnej
Policzmy
min[Π(u)]⇒ dΠ(u)du
= 0⇒ ku − P = 0. (154)
Z powyższej zależności możemy określić przemieszczenia w punkcie równowagi.
u =P
k. (155)
Koczubiej Podstawy mechaniki komputerowej 109/188

Analiza statyczna MES pręta
Rozwiążmy problem pręta rozciąganego o zmiennym polu przekroju, obciążonydwoma siłami skupionymi P1, P2 i obciążeniem ciągłym q(x)
L/3
P2
x
q(x)
L
P1E A(x)
Rys. 34: Pręt
Całkowita energia potencjalna obciążonego pręta (przypadek jednowymiarowy)
Π = U − L, (156)
gdzie U jest energią sprężystą,
U =12E
∫ L
0A(x) (u′(x))2 dx , (157)
Koczubiej Podstawy mechaniki komputerowej 110/188

Analiza statyczna MES pręta
a L jest pracą obciążeń zewnętrznych
L =
∫ L
0q(x)u(x) dx +
n∑i=1
FiQi . (158)
Siły Fi są uogólnionymi siłami węzłowymi, a Qi są uogólnionymiprzemieszczeniami na kierunkach tych sił.
Biorąc pod uwagę geometrię i sposób obciążenia pręta, możemy gozdyskretyzować w następujący sposób
L/3x
q(x)|x=0q(x)|x=L/3
q(x)|x=L/3q(x)|x=L
2L/3u1=u(0)=0
A1 A2E E2 311 2
u1 u2u3F1 F2 F3
Rys. 35: Dyskretyzacja pręta
Koczubiej Podstawy mechaniki komputerowej 111/188

Analiza statyczna MES pręta
Następnie zdefiniujmy globalny wektor stopni swobody Q ({•} – oznaczają wektorkolumnowy, {•}T ≡ [•])
Q ={Q1 Q2 Q3
} ≡ {u1 u2 u3}, (159)
i globalny wektor sił węzłowych F
F ={F1 F2 F3
}. (160)
W wektorze Q zawarte są:
kinematyczny (podstawowy) warunek brzegowy Q1 ≡ u1 = 0,
niewiadome kinematyczne (pierwotne) Q2 i Q3.
W wektorze F zawarte są:
statyczne (naturalne) warunki brzegowe F2 = P1 i F3 = P2,
niewiadoma statyczna (wtórna) F1.
Koczubiej Podstawy mechaniki komputerowej 112/188

Analiza statyczna MES pręta
Będziemy korzystać z tego, że całkowita energia potencjalna pręta jest sumąenergii potencjalnej części pręta (elementów skończonych)
Π =m∑
e=1
Πe = Π1 +Π2. (161)
x2x1
q1(x1)
A1Eq2(x2)
A2E21 21
u2u1u1u1 L1 u2u2u1u2 L2
x
2 31
1 2
u1 u2u3F1 F2 F3
F1F 1 F2F
1 F1F 2 F2F
2
Rys. 36: Elementy skończone
i rozważmy dowolny element skończony pręta. Dla wygody wprowadźmy lokalneukłady współrzędnych związanych z elementami xe.Koczubiej Podstawy mechaniki komputerowej 113/188

Analiza statyczna MES pręta
W elemencie skończonym
xe
qe(xe)AeEe
21
u2ueu1ue Le xe ∈ (0, Le)F1Fe F2Fe
Rys. 37: Prętowy element skończony
zdefiniujmy wektor stopni swobody elementu Qe
Qe ={Qe1 Qe2
} ≡ {ue1 ue2}, (162)
i sił węzłowych Fe
Fe ={F e1 F e2
}. (163)
Przyjmiemy interpolację nieznanej funkcji przemieszczenia ue(xe) w formie
ue(xe) = Ne1(xe)ue1 + Ne2(x
e)ue2 = Ne1(xe)Qe1 + Ne2(x
e)Qe2 . (164)
Koczubiej Podstawy mechaniki komputerowej 114/188

Analiza statyczna MES pręta
Skorzystamy z zapisu macierzowego
ue(xe) = Ne(xe)Qe = (Qe)T (Ne(xe))T , (165)
gdzie Ne(xe) ma postać
Ne(xe) =[Ne1(x
e) Ne2(xe)], (166)
a Ne1(xe) i Ne2(x
e) są funkcjami kształtu Lagrange’a
Ne1(xe) = 1− xe
Le, Ne2(x
e) =xe
Le. (167)
Pochodna funkcji przemieszczenia będzie miała postać
u′e(xe) = N′e(xe)Qe = (Qe)T (N′e(xe))T , (168)
gdzieN′e(xe) =
[N ′e1 (x
e) N ′e2 (xe)], (169)
i
N ′e1 (xe) = − 1
Le, N ′e2 (x
e) =1Le. (170)
Koczubiej Podstawy mechaniki komputerowej 115/188

Analiza statyczna MES pręta
Zakładamy stały przekrój poprzeczny elementu skończonego prętowego Ae (możebyć inny w różnych elementach). Całkowita energia potencjalna elementuskończonego prętowego e wynosi
Πe =12E eAe
∫ Le
0(u′e(xe))2 dxe −
∫ Le
0qe(xe)ue(xe) dxe − F e1Q
e1 − F e2Q
e2 . (171)
Wykorzystując interpolację, energię potencjalną można zapisać
Πe =12E eAe
∫ Le
0(Qe)T(N′e)TN′eQe dxe −
∫ Le
0(Qe)T(Ne)Tqe dxe − (Qe)TFe =
=12(Qe)T
{E eAe
∫ Le
0(N′e)TN′e dxe
}Qe − (Qe)T
{∫ Le
0(Ne)Tqe dxe + Fe
}=
=12(Qe)TKeQe − (Qe)T
{Pe + Fe
}. (172)
Koczubiej Podstawy mechaniki komputerowej 116/188

Analiza statyczna MES pręta
We wzorze
Πe =12(Qe)TKeQe − (Qe)T
{Pe + Fe
}, (173)
oznaczono:
macierz sztywności prętowego elementu skończonego
Ke = E eAe∫ Le
0(N′e(xe))TN′e(xe) dxe, (174)
wektor węzłowych równoważników obciążenia prętowego elementuskończonego
Pe =∫ Le
0(Ne)Tqe(xe) dxe, (175)
wektor sił węzłowych prętowego elementu skończonego Fe,
wektor stopni swobody (niewiadome pierwotne, przemieszczeniaw węzłach) prętowego elementu skończonego Qe.
Koczubiej Podstawy mechaniki komputerowej 117/188

Analiza statyczna MES pręta
Po wykorzystaniu interpolacji ue(xe), całkowita energia potencjalna elementu jestteraz funkcją wielu (w naszym przypadku dwóch) zmiennych Πe(Qe1 ,Q
e2) i warunek
konieczny stanu równowagi (minimum energii potencjalnej) jest następujący
∂Πe
∂Qe1= 0
∂Πe
∂Qe2= 0
⎫⎪⎪⎬⎪⎪⎭ ≡
∂Πe
∂Qe= 0⇒ ∂
∂Qe
(12(Qe)TKeQe − (Qe)T
{Pe + Fe
})= 0,
(176)co prowadzi do równań równowagi MES dla prętowego elementu skończonego
KeQe = Pe + Fe, (177)
lubKeQe = Re, (178)
gdzie zdefiniowano całkowity wektor obciążenia elementu skończonego
Re = Pe + Fe. (179)
Koczubiej Podstawy mechaniki komputerowej 118/188

Analiza statyczna MES pręta
Jeśli przyjmiemy, że E e = const. i Ae = const. to
Ke = E eAe∫ Le
0(N′e(xe))TN′e(xe) dxe = E eAe
∫ Le
0
⎡⎢⎣−1Le
1Le
⎤⎥⎦[− 1
Le1Le
]dxe =
= E eAe∫ Le
0
⎡⎢⎢⎣
1(Le)2
− 1(Le)2
− 1(Le)2
1(Le)2
⎤⎥⎥⎦ dxe = E eAe
⎡⎢⎢⎣
xe
(Le)2− xe
(Le)2
− xe
(Le)2xe
(Le)2
⎤⎥⎥⎦∣∣∣∣∣∣∣∣
Le
0
=
= E eAe
⎡⎢⎣1Le− 1Le
− 1Le
1Le
⎤⎥⎦ , (180)
Ke =
⎡⎢⎣
E eAe
Le−E
eAe
Le
−EeAe
LeE eAe
Le
⎤⎥⎦ . (181)
Koczubiej Podstawy mechaniki komputerowej 119/188

Analiza statyczna MES pręta
Jeśli przyjmiemy, że qe = const. to
Pe = qe∫ Le
0(Ne)Tqe dxe = qe
∫ Le
0
⎡⎢⎣ 1−
xe
Le
xe
Le
⎤⎥⎦ dxe = qe
⎡⎢⎢⎣xe − (xe)2
2Le
(xe)2
2Le
⎤⎥⎥⎦∣∣∣∣∣∣∣∣
Le
0
= qe
⎡⎢⎣Le
2Le
2
⎤⎥⎦ ,
(182)
Pe =
⎡⎢⎣qeLe
2qeLe
2
⎤⎥⎦ . (183)
Wykorzystaliśmy fakt, że całkowita energia potencjalna pręta jest sumą energiipotencjalnych elementów skończonych i zajmowaliśmy się jednym elementemskończonym. Kolejnym krokiem jest agregacja, która pozwoli wyrazić man energiępotencjalną całego pręta poprzez nieznane wielkości globalne zawarte w wektorzeQ.
Koczubiej Podstawy mechaniki komputerowej 120/188

Analiza statyczna MES pręta
Posłużymy się macierzą topologii w postaci
Element Węzeł 1 Węzeł 21 1 22 2 3
Warunki ciągłości przemieszczeń we wspólnych węzłach elementów skończonychpozwolą nam napisać
Q =
⎡⎣ Q1
Q2Q3
⎤⎦ =
⎡⎣ Q11
Q12 = Q21Q22
⎤⎦ . (184)
0 Q3
Q2 = +
0 Q1
3
2
1
1 1 1 12 3
K1
K Q P F
P1
K2 P2
F1
F2
Rys. 38: Graficzna interpretacja agregacji
Koczubiej Podstawy mechaniki komputerowej 121/188

Analiza statyczna MES pręta
0 Q3
Q2 = +
0 Q1
3
2
1
1 1 1 12 3
K1
K Q P F
P1
K2 P2
F1
F2
Globalna macierz sztywności będzie miała postać
K = An
e=1Ke =
⎡⎣ K11 K12 K13
K21 K22 K13K31 K33 K33
⎤⎦ =
⎡⎣ K 111 K 112 0
K 121 K 122 + K 211 K 2120 K 221 K 222
⎤⎦ . (185)
Globalne wektory węzłowych równoważników obciążenia i sił węzłowych
P = An
e=1Pe =
⎡⎣ P1
P2P3
⎤⎦ =
⎡⎣ P11
P12 + P21P22
⎤⎦ , (186)
F = An
e=1Fe =
⎡⎣ F1
F2F3
⎤⎦ =
⎡⎣ F 11
F 12 + F 21F 22
⎤⎦ . (187)
Koczubiej Podstawy mechaniki komputerowej 122/188

Analiza statyczna MES pręta
Układ równań MES zapiszemy w postaci⎡⎣ K 111 K 112 0
K 121 K 122 + K 211 K 2120 K 221 K 222
⎤⎦⎡⎣ Q1
Q2Q3
⎤⎦ =
⎡⎣ P11
P12 + P21P22
⎤⎦+
⎡⎣ F1
F2F3
⎤⎦ . (188)
Rozwiązanie układu równań wymaga uwzględnienia warunków brzegowych
Q1 = u(0) = 0, F2 = P1, F3 = P2, (189)
ostatecznie będziemy mogli zapisać⎡⎣ K 111 K 112 0
K 121 K 122 + K 211 K 2120 K 221 K 222
⎤⎦⎡⎣ 0Q2
Q3
⎤⎦ =
⎡⎣ P11
P12 + P21P22
⎤⎦+
⎡⎣ F1
P1P2
⎤⎦ . (190)
Koczubiej Podstawy mechaniki komputerowej 123/188

Analiza statyczna MES pręta
Po rozwiązaniu układu równań MES, otrzymamy wartości przemieszczeńw węzłach Q2 i Q3 oraz wartość siły F1.
Pamiętając o tym, że
Q =
⎡⎣ Q1
Q2Q3
⎤⎦ =
⎡⎣ Q11
Q12 = Q21Q22
⎤⎦ , (191)
i wykorzystując interpolację
ue(xe) = Ne1(xe)Qe1 + Ne2(x
e)Qe2 =
(1− xe
Le
)Qe1 +
(xe
Le
)Qe2 , (192)
będziemy mogli zapisać szukaną funkcję przemieszczeń dla elementów
u(x) =
⎧⎪⎪⎨⎪⎪⎩
u1(x1) =
(1− x1
L1
)Q1 +
(x1
L1
)Q2 dla e = 1,
u2(x2) =
(1− x2
L2
)Q2 +
(x2
L2
)Q3 dla e = 2.
(193)
Koczubiej Podstawy mechaniki komputerowej 124/188

Analiza statyczna MES pręta
L/3
P2
x
q(x)
L
P1E A(x)
L/3x
q(x)|x=0q(x)|x=L/3
q(x)|x=L/3q(x)|x=L
2L/3u1=u(0)=0
A1 A2E E2 311 2
u1 u2u3F1 F2 F3
Przyjmijmy następujące dane:
E = 200 GPa,
L = 1, 2 m,
A1 = 0, 5 · 10−3 m2,A2 = 0, 4 · 10−3 m2,
q = 10 kN/m,
P1 = 40 kN,
P2 = 5 kN.
Element e = 1: E 1 = 200 GPa, A1 = 0, 5 · 10−3 m2, L1 = 0, 4 m, q1 = 10 kN/m,
K1 = 106[250 −250−250 250
], P1 = 103
[22
]. (194)
Koczubiej Podstawy mechaniki komputerowej 125/188

Analiza statyczna MES pręta
Element e = 2: E 2 = 200 GPa, A1 = 0, 4 · 10−3 m2, L2 = 0, 8 m, q2 = 10 kN/m,
K2 = 106[100 −100−100 100
], P2 = 103
[44
]. (195)
Globalna macierz sztywności i globalny wektor równoważników obciążenia
K = 106
⎡⎣ 250 −250 0−250 350 −1000 −100 100
⎤⎦ , P = 103
⎡⎣ 264
⎤⎦ , (196)
globalny wektor sił węzłowych
F = 103
⎡⎣ F1405
⎤⎦ . (197)
Koczubiej Podstawy mechaniki komputerowej 126/188

Analiza statyczna MES pręta
Układ równań równowagi MES, po uwzględnieniu warunków brzegowych
106
⎡⎣ 250 −250 0−250 350 −1000 −100 100
⎤⎦⎡⎣ 0Q2
Q3
⎤⎦ = 103
⎡⎣ 264
⎤⎦+ 103
⎡⎣ F1405
⎤⎦ . (198)
Z równania 2 i 3 wyznaczymy niewiadome pierwotne (przemieszczenia)
Q2 = 0, 00022m, Q3 = 0, 00031m. (199)
Następnie z równania 1 wyznaczymy niewiadomą wtórną (reakcja)
F1 = −250 · 106 · Q2 − 2 · 103 = −250 · 106 · 0.00022− 2 · 103 = −57 kN. (200)
Globalny wektor przemieszczeń będzie wynosił
Q =
⎡⎣ Q1
Q2Q3
⎤⎦ =
⎡⎣ 00, 000220, 00031
⎤⎦ , (201)
Koczubiej Podstawy mechaniki komputerowej 127/188

Analiza statyczna MES pręta
a przemieszczenia w elementach
Q1 =[
Q1Q2
]=
[Q11Q12
]=
[0
0, 00022
], (202)
Q2 =[
Q2Q3
]=
[Q21Q22
]=
[0, 000220, 00031
]. (203)
Funkcja przemieszczeń dla elementów
u(x) =
⎧⎪⎪⎨⎪⎪⎩
u1(x1) =
(x1
0, 4
)0, 00022 dla e = 1,
u2(x2) =
(1− x2
0, 8
)0, 00022+
(x2
0, 8
)0, 00031 dla e = 2.
(204)
Koczubiej Podstawy mechaniki komputerowej 128/188

Analiza statyczna MES pręta
xx=0
Q2=0,00022
Q3=0,00031
Q1=0x=0,4 x=1,2
u
1 22 31
N1(x)Q2N2 N2(x)Q3
N1
N2
N2(x)Q2
Rys. 39: Przemieszczenia pręta
Koczubiej Podstawy mechaniki komputerowej 129/188

Analiza statyczna MES pręta
Siły węzłowe w elementach można obliczyć dwoma sposobami.
Sposób 1. Różniczkowanie funkcji kształtu.
Korzystając z zależności
F = Aσ, σ = Eε, ε =du(x)dx, (205)
możemy napisać
F = AEdu(x)dx, (206)
czyli dla obu elementów
F 1(x1) = EA1u′1(x) = EA1(N11 (x1)Q1 + N12 (x
1)Q2), (207)
F 2(x2) = EA2u′2(x) = EA2(N21 (x2)Q2 + N22 (x
2)Q3). (208)
Koczubiej Podstawy mechaniki komputerowej 130/188

Analiza statyczna MES pręta
Element e = 1, L1 = 0, 4 m, Q1 = 0 m, Q2 = 0, 00022m,
F 1(x1) = EA1((− 1L1
)Q1 +
(1L1
)Q2
)=
= 200 · 109 · 5 · 10−4(−(10, 4
)0+
(10, 4
)0, 00022
)= 55 kN.
Element e = 2, L2 = 0, 8 m, Q2 = 0, 00022m, Q3 = 0, 00031m,
F 2(x2) = EA2((− 1L2
)Q2 +
(1L2
)Q3
)=
= 200 · 109 · 4 · 10−4(−(10, 8
)0, 00022+
(10, 4
)0, 00031
)= 11, 25 kN.
Koczubiej Podstawy mechaniki komputerowej 131/188

Analiza statyczna MES pręta
Sposób 2. Równania równowagi elementu skończonego.
Skorzystamy z zależnościFe = KeQe − Pe, (209)
i napiszemy
F1 = K1Q1 − P1, (210)
F2 = K2Q2 − P2. (211)
Element e = 1,
F1 =[
F 11F 12
]= 106
[250 −250−250 250
] [0
0, 000220
]−103
[22
]=
[ −5753
]kN,
(212)
Element e = 2,
F2 =[
F 21F 22
]= 106
[125 −125−125 125
] [0, 0002200, 000292
]−103
[44
]=
[ −135
]kN,
(213)
Koczubiej Podstawy mechaniki komputerowej 132/188

Analiza statyczna MES pręta
xx=0
57 kN53 kN
P1=40 kNq=10 kN/m(L2=0,8 m)
P2=5 kN
55 kN
11,25 kN13 kN5 kN
x=0,4 x=1,2
F
1 22 31
q=10 kN/m(L1=0,4 m)
Rys. 40: Siły węzłowe w pręcie
Jak widać, wyniki otrzymane poprzez różniczkowanie funkcji pierwotnej, są niskiejjakości, na przykład nie zapewniają odpowiedniej ciągłości na granicachelementów skończonych. Jakość rozwiązania możemy poprawić zwiększając liczbęelementów skończonych lub przez używanie funkcji bazowych wyższych rzędów.
Koczubiej Podstawy mechaniki komputerowej 133/188

Belkowy element skończony
1 Informacje ogólne
2 Uwagi wstępne
3 Sformułowanie lokalne problemu brzegowego
4 Sformułowanie globalne problemu brzegowego
5 Metoda różnic skończonych
6 Wprowadzenie do metody elementów skończonych
7 Etapy procedury MES
8 Funkcje kształtu
9 Analiza statyczna MES pręta
10 Belkowy element skończony
11 Elementy w 2D
12 Ramowy element skończony
Koczubiej Podstawy mechaniki komputerowej 134/188

Belkowy element skończony
x
z
q(x)
L
P
M E J(x)
Rys. 41: Belka
Całkowita energia potencjalna belki wynosi
Π =12E
∫ L
0J(x) (w ′′(x))2 dx −
∫ L
0q(x)w(x) dx +
n∑i=1
FiQi . (214)
Koczubiej Podstawy mechaniki komputerowej 135/188

Belkowy element skończony
xe
ze
qe(xe)JeEe
21
w2wew1
φ1φe
we
Le
xe ∈ (0, Le)
F1Fe
F2Fe
F3Fe
φ2φeF4Fe
Rys. 42: Belkowy element skończony
Zdefiniujmy wektor stopni swobody elementu Qe
Qe ={Qe1 Qe2 Qe3 Qe4
} ≡ {w e1 ϕe1 w e2 ϕe2
}, (215)
i wektor sił węzłowych Fe
Fe ={F e1 F e2 F e3 F e4
}. (216)
Koczubiej Podstawy mechaniki komputerowej 136/188

Belkowy element skończony
Zakładając stały stały moment bezwładności dla całego elementu, całkowitaenergia potencjalna belkowego elementu skończonego będzie wynosić
Πe =12E eJe
∫ Le
0
(w ′′e(xe)
)2dxe−
∫ Le
0qe(xe)w e(x) dxe−F e1Qe1−F e2Qe2−F e3Qe3−F e4Qe4 .
(217)Wykorzystując interpolację Hermite’a w postaci
ue(xe) = Ne1(xe)w e1 + Ne2(x
e)ϕe1 + Ne3(xe)w e2 + Ne4(x
e)ϕe2 =
= Ne1(xe)Qe1 + Ne2(x
e)Qe2 + Ne3(xe)Qe3 + Ne4(x
e)Qe4 =
= Ne(xe)Qe = (Qe)T (Ne(xe))T , (218)
gdzie Ne(xe) ma postać
Ne(xe) =[Ne1(x
e) Ne2(xe) Ne3(x
e) Ne4(xe)], (219)
a Ne1(xe), Ne2(x
e), Ne3(xe) i Ne4(x
e) są funkcjami kształtu.
Koczubiej Podstawy mechaniki komputerowej 137/188

Belkowy element skończony
Funkcje kształtu Hermite’a mają postać
Ne1(xe) = 1− 3
(xe
Le
)2+ 2
(xe
Le
)3, Ne2(x
e) = xe
(1− 2
(xe
Le
)+
(xe
Le
)2),
Ne3(xe) = 3
(xe
Le
)2− 2
(xe
Le
)3, Ne4(x
e) = xe
(−(xe
Le
)+
(xe
Le
)2).
(220)
x x
w
1 1N1(x) N3(x)
N2(x)
N4(x)L0 L0
tg()=1
β
tg(β)=1
φ
Rys. 43: Funkcje kształtu Hermite’a
Koczubiej Podstawy mechaniki komputerowej 138/188

Belkowy element skończony
Druga pochodna funkcji przemieszczenia będzie miała postać
u′′e(xe) = N′′e(xe)Qe = (Qe)T (N′′e(xe))T , (221)
gdzieN′′e(xe) =
[N ′′e1 (xe) N ′′e2 (xe) N ′′e3 (xe) N ′′e4 (xe)
], (222)
i
N ′′e1 (xe) = − 6(Le)2
+12
(Le)3xe, N ′′e2 (xe) = − 4
Le+6
(Le)2xe,
N ′′e3 (xe) =6
(Le)2− 12
(Le)3xe, N ′′e4 (xe) = − 2
Le+6
(Le)2xe. (223)
Wykorzystując interpolację, energię potencjalną można zapisać
Πe =12E eJe
∫ Le
0(Qe)T(N′′e)TN′′eQe dxe −
∫ Le
0(Qe)T(Ne)Tqe dxe − (Qe)TFe =
=12(Qe)T
{E eJe
∫ Le
0(N′′e)TN′′e dxe
}Qe − (Qe)T
{∫ Le
0(Ne)Tqe dxe + Fe
}=
=12(Qe)TKeQe − (Qe)T
{Pe + Fe
}. (224)
Koczubiej Podstawy mechaniki komputerowej 139/188

Belkowy element skończony
We wzorze
Πe =12(Qe)TKeQe − (Qe)T
{Pe + Fe
}, (225)
oznaczono:
macierz sztywności belkowego elementu skończonego
Ke = E eAe∫ Le
0(N′′e(xe))TN′′e(xe) dxe, (226)
wektor węzłowych równoważników obciążenia belkowego elementuskończonego
Pe =∫ Le
0(Ne)Tqe(xe) dxe, (227)
wektor sił węzłowych belkowego elementu skończonego Fe,
wektor stopni swobody (niewiadome pierwotne, przemieszczeniaw węzłach) belkowego elementu skończonego Qe.
Koczubiej Podstawy mechaniki komputerowej 140/188

Belkowy element skończony
Po wykorzystaniu interpolacji ue(xe), całkowita energia potencjalna elementu jestteraz funkcją czterech zmiennych Πe(Qe1 ,Q
e2,Q
e3 ,Q
e4) i warunek konieczny stanu
równowagi (minimum energii potencjalnej) jest następujący
∂Πe
∂Qe1= 0
∂Πe
∂Qe2= 0
∂Πe
∂Qe3= 0
∂Πe
∂Qe4= 0
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭
≡ ∂Πe
∂Qe= 0⇒ ∂
∂Qe
(12(Qe)TKeQe − (Qe)T
{Pe + Fe
})= 0,
(228)co prowadzi do równań równowagi MES dla belkowego elementu skończonego
KeQe = Pe + Fe, (229)
lubKeQe = Re, Re = Pe + Fe, (230)
gdzie zdefiniowano całkowity wektor obciążenia elementu skończonego Re.Koczubiej Podstawy mechaniki komputerowej 141/188

Belkowy element skończony
Jeśli przyjmiemy, że E e = const. i Je = const. to
Ke = E eJe∫ Le
0(N′′e(xe))TN′′e(xe) dxe =
= E eJe∫ Le
0
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
− 6(Le)2
+12xe
(Le)3
− 4Le
+6xe
(Le)2
6(Le)2− 12x
e
(Le)3
− 2Le
+6xe
(Le)2
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
[− 6(Le)2
+12xe
(Le)3− 4
Le+6xe
(Le)2
6(Le)2
− 12xe
(Le)3− 2
Le+6xe
(Le)2
]dxe, (231)
Koczubiej Podstawy mechaniki komputerowej 142/188

Belkowy element skończony
i po wycałkowaniu macierz sztywności elementu belkowego będzie wynosić
Ke =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
12E eJe
(Le)36E eJe
(Le)2−12E
eJe
(Le)36E eJe
(Le)2
6E eJe
(Le)24E eJe
Le−6E
eJe
(Le)22E eJe
Le
−12EeJe
(Le)3−6E
eJe
(Le)212E eJe
(Le)3−6E
eJe
(Le)2
6E eJe
(Le)22E eJe
Le−6E
eJe
(Le)24E eJe
Le
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦. (232)
Koczubiej Podstawy mechaniki komputerowej 143/188

Belkowy element skończony
Jeśli przyjmiemy, że qe = const. to
Pe = qe∫ Le
0(Ne)Tqe dxe = qe
∫ Le
0
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
1− 3(xe
Le
)2+ 2
(xe
Le
)3
xe
(1− 2
(xe
Le
)+
(xe
Le
)2)
3(xe
Le
)2− 2
(xe
Le
)3
xe
(−(xe
Le
)+
(xe
Le
)2)
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
dxe, (233)
Koczubiej Podstawy mechaniki komputerowej 144/188

Belkowy element skończony
i po wycałkowaniu wektor równoważników obciążenia elementu belkowegobędzie wynosił
Pe =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
qeLe
2qe(Le)2
12qeLe
2
−qe(Le)2
12
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦. (234)
Dalsze postępowanie, czyli: agregacja, budowa równań MES, wprowadzeniewarunków brzegowych, rozwiązanie równań jest analogiczne jak w przypadkuelementów prętowych.
Koczubiej Podstawy mechaniki komputerowej 145/188

Belkowy element skończony
Rozwiążmy belkę ciągłą zdyskretyzowaną dwoma elementami skończonymi.
x
z
q
L1 L2
M EJ 2EJ
Rys. 44: Belka
Przyjmijmy następujące dane:
EJ = 100 kNm2,
L1 = 6 m,
L2 = 8 m,
q = 10 kN/m,
M = 20 kNm.
Koczubiej Podstawy mechaniki komputerowej 146/188

Belkowy element skończony
x
z
q
L1 L2
EJ 2EJ
w1=0 w2=0 w3=0
2 31
1 2
w1 w2 w3
F1 F3
F4
F5
F6F2φ2 φ3φ1
Rys. 45: Dyskretyzacja belki
Zdefiniujmy globalny wektor stopni swobody
Q ={Q1 Q2 Q3 Q4 Q5 Q6
} ≡ {w1 ϕ1 u2 ϕ2 w3 ϕ3}, (235)
i globalny wektor sił węzłowych
F ={F1 F2 F3 F4 F5 F6
}. (236)
Koczubiej Podstawy mechaniki komputerowej 147/188

Belkowy element skończony
x
z
q
L1 L2
M EJ 2EJ x
z
q
L1 L2
EJ 2EJ
w1=0 w2=0 w3=0
2 31
1 2
w1 w2 w3
F1 F3
F4
F5
F6F2φ2 φ3φ1
W wektorze Q zawarte są:
kinematyczne (podstawowe) waruneki brzegoweQ1 ≡ w1 = Q3 ≡ w2 = Q5 ≡ w3 = 0,
niewiadome kinematyczne (pierwotne) Q2, Q4 i Q6.
W wektorze F zawarte są:
statyczne (naturalne) warunki brzegowe F2 = M , F4 = 0 i F6 = 0,
niewiadome statyczne (wtórne) F1, F3 i F5.
Koczubiej Podstawy mechaniki komputerowej 148/188

Belkowy element skończony
x
2 31
1 2
w1 w2 w3
F1 F3
F4
F5
F6F2
z1 z2
φ2 φ3φ1
q
x2x1EJ 2EJ21 21
L1 L2
w1
φ1φ1
w1
F1F 1
F2F 1
w2
φ2φ1
w1
F3F 1
F4F 1
w1
φ1φe
we
F1F 2
F2F 2
w2
φ2φe
we
F3F 2
F4F 2
Rys. 46: Elementy skończone
Macierz topologii belki
Element Węzeł 1 Węzeł 21 1 22 2 3
Koczubiej Podstawy mechaniki komputerowej 149/188

Belkowy element skończony
Układ równań MES zapiszemy w postaci⎡⎢⎢⎢⎣
K 111 K 112 K 113 K 114 0 0K 121 K 122 K 123 K 124 0 0K 131 K 132 K 133 + K 211 K 134 + K 212 K 213 K 214K 141 K 142 K 143 + K 221 K 144 + K 222 K 223 K 2240 0 K 231 K 232 K 233 K 2340 0 K 241 K 242 K 243 K 244
⎤⎥⎥⎥⎦⎡⎢⎢⎢⎣
Q1Q2Q3Q4Q5Q6
⎤⎥⎥⎥⎦ =
⎡⎢⎢⎢⎣
P11P12
P13 + P21P14 + P22
P23P24
⎤⎥⎥⎥⎦+
⎡⎢⎢⎢⎣
F1F2F3F4F5F6
⎤⎥⎥⎥⎦ .(237)
Rozwiązanie układu równań wymaga uwzględnienia warunków brzegowych
Q1 = Q3 = Q5 = 0, F2 = M , F4 = F6 = 0, (238)
ostatecznie będziemy mogli zapisać⎡⎢⎢⎢⎣
K 111 K 112 K 113 K 114 0 0K 121 K 122 K 123 K 124 0 0K 131 K 132 K 133 + K 211 K 134 + K 212 K 213 K 214K 141 K 142 K 143 + K 221 K 144 + K 222 K 223 K 2240 0 K 231 K 232 K 233 K 2340 0 K 241 K 242 K 243 K 244
⎤⎥⎥⎥⎦⎡⎢⎢⎢⎣0Q20Q40Q6
⎤⎥⎥⎥⎦ =
⎡⎢⎢⎢⎣
P11P12
P13 + P21P14 + P22
P23P24
⎤⎥⎥⎥⎦+
⎡⎢⎢⎢⎣
F1MF30F50
⎤⎥⎥⎥⎦ .(239)
Koczubiej Podstawy mechaniki komputerowej 150/188

Belkowy element skończony
Element e = 1: E 1J1 = 100 kNm2, L1 = 6 m, q1 = 0,
K1 =
⎡⎢⎢⎣5, 5556 16, 1667 −5, 5556 16, 666716, 1667 66, 6667 −16, 1667 33, 3333−5, 5556 −16, 1667 5, 5556 −16, 166716, 1667 33, 3333 −16, 1667 66, 6667
⎤⎥⎥⎦ , P1 =
⎡⎢⎢⎣0000
⎤⎥⎥⎦ .(240)
Element e = 2: E 2J2 = 200 kNm2, L2 = 8 m, q2 = 10 kN/m,
K2 =
⎡⎢⎢⎣4, 6875 18, 7500 −4, 6875 18, 750018, 7500 100, 0000 −18, 7500 50, 0000−4, 6875 −18, 7500 4, 6875 −18, 750018, 7500 50, 0000 −18, 7500 100, 0000
⎤⎥⎥⎦ , P2 =
⎡⎢⎢⎣40, 000053, 333340, 0000−53, 3333
⎤⎥⎥⎦ .
(241)
Koczubiej Podstawy mechaniki komputerowej 151/188

Belkowy element skończony
W wyniku agregacji otrzymamy układ równań MES⎡⎢⎢⎢⎣
5, 5556 16, 1667 −5, 5556 16, 6667 0 016, 1667 66, 6667 −16, 1667 33, 3333 0 0−5, 5556 −16, 6667 10, 2431 2, 0833 −4, 6875 18, 750016, 6667 33, 3333 2, 0833 166, 6667 −18, 7500 50, 0000
0 0 −4, 6875 −18, 7500 4, 6875 −18, 75000 0 18, 7500 50, 0000 −18, 7500 100, 0000
⎤⎥⎥⎥⎦⎡⎢⎢⎢⎣0Q20Q40Q6
⎤⎥⎥⎥⎦ =
=
⎡⎢⎢⎢⎣
00
40, 000053, 333340, 0000−53, 3333
⎤⎥⎥⎥⎦+
⎡⎢⎢⎢⎣
F1−20F30F50
⎤⎥⎥⎥⎦ . (242)
Niewiadome pierwotne możemy obliczyć z równań 2, 4 i 6⎡⎣ 66, 6667 33, 3333 033, 3333 166, 6667 50, 0000
0 50, 0000 100, 0000
⎤⎦⎡⎣ Q2
Q4Q6
⎤⎦ =
⎡⎣ −20, 000053, 3333−53, 3333
⎤⎦ , (243)
Q2 = −0, 66 rad, Q4 = 0, 72 rad, Q6 = −0, 8933 rad. (244)
Koczubiej Podstawy mechaniki komputerowej 152/188

Belkowy element skończony
Niewiadome wtórne wyznaczymy z równań 1, 3 i 5
F1 = 16, 6667 ·Q2 + 16, 6667 · Q4 = 1 kN, (245)
F3 = −16, 6667 · Q2 + 2, 0833 · Q4 + 18, 75 ·Q6 − 40 = −44, 25 kNm, (246)
F5 = −18, 75 · Q4 − 18, 75 ·Q6 − 40 = −36, 75 kN. (247)
Globalny wektor przemieszczeń będzie wynosił
Q =
⎡⎢⎢⎢⎢⎢⎢⎣
Q1Q2Q3Q4Q5Q6
⎤⎥⎥⎥⎥⎥⎥⎦=
⎡⎢⎢⎢⎢⎢⎢⎣
0−0, 660
0, 720
−0, 8933
⎤⎥⎥⎥⎥⎥⎥⎦, (248)
Koczubiej Podstawy mechaniki komputerowej 153/188

Belkowy element skończony
a przemieszczenia w elementach
Q1 =
⎡⎢⎢⎣
Q1Q2Q3Q4
⎤⎥⎥⎦ =
⎡⎢⎢⎣
Q11Q12Q13Q14
⎤⎥⎥⎦ =
⎡⎢⎢⎣
00, 660
0, 72
⎤⎥⎥⎦ , (249)
Q2 =
⎡⎢⎢⎣
Q3Q4Q5Q6
⎤⎥⎥⎦ =
⎡⎢⎢⎣
Q21Q22Q23Q24
⎤⎥⎥⎦ =
⎡⎢⎢⎣
00, 720
−0, 8933
⎤⎥⎥⎦ . (250)
Koczubiej Podstawy mechaniki komputerowej 154/188

Belkowy element skończony
Funkcja przemieszczeń dla elementów
u(x) =
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
u1(x1) = x1
(1− 2
(x1
6
)+
(x1
6
)2)0, 66+
+ x1
(−(x1
6
)+
(x1
6
)2)0, 72 dla e = 1,
u2(x2) = x2
(1− 2
(x2
8
)+
(x2
8
)2)0, 72+
− x2
(−(x2
8
)+
(x2
8
)2)0, 8933 dla e = 2.
(251)
Koczubiej Podstawy mechaniki komputerowej 155/188

Belkowy element skończony
xx=0
Q1=0Q2=-0,66
Q3=0Q4=0,72
Q5=0Q6=-0,8933
x=6 x=14
w
1 31
N2(x)Q2N1
N4(x)Q4N1
N2(x)Q4N2 N4(x)Q6N2
2 2
Rys. 47: Przemieszczenia belki
Koczubiej Podstawy mechaniki komputerowej 156/188

Belkowy element skończony
Obliczmy siły węzłowe, korzystając z równań równowagi elementów.
F1 = K1Q1 − P1, (252)
F2 = K2Q2 − P2. (253)
Element e = 1,
F1 =
⎡⎣ F 11
F 12F 13F 14
⎤⎦ =
⎡⎣ 5, 5556 16, 1667 −5, 5556 16, 666716, 1667 66, 6667 −16, 1667 33, 3333−5, 5556 −16, 1667 5, 5556 −16, 166716, 1667 33, 3333 −16, 1667 66, 6667
⎤⎦⎡⎣ 00, 660
0, 72
⎤⎦−
−
⎡⎣ 0000
⎤⎦ =
⎡⎣ 1−20−126
⎤⎦ kNkNmkNkNm
, (254)
Element e = 2,
F2 =
⎡⎣ F 21
F 22F 23F 24
⎤⎦ =
⎡⎣ 4, 6875 18, 7500 −4, 6875 18, 750018, 7500 100, 0000 −18, 7500 50, 0000−4, 6875 −18, 7500 4, 6875 −18, 750018, 7500 50, 0000 −18, 7500 100, 0000
⎤⎦⎡⎣ 0
0, 720
−0, 8933
⎤⎦−
−
⎡⎣ 40, 0000
53, 333340, 0000−53, 3333
⎤⎦ =
⎡⎣ −43, 25−26−36, 75
0
⎤⎦ kNkNmkNkNm
, (255)
Koczubiej Podstawy mechaniki komputerowej 157/188

Belkowy element skończony
20 kNm26 kNm
-1 kN
43,25 kN
-36,75 kN
xx=0 x=6 x=14
F
1 31 22
80 kNm
Rys. 48: Siły węzłowe w belce
Koczubiej Podstawy mechaniki komputerowej 158/188

Elementy w 2D
1 Informacje ogólne
2 Uwagi wstępne
3 Sformułowanie lokalne problemu brzegowego
4 Sformułowanie globalne problemu brzegowego
5 Metoda różnic skończonych
6 Wprowadzenie do metody elementów skończonych
7 Etapy procedury MES
8 Funkcje kształtu
9 Analiza statyczna MES pręta
10 Belkowy element skończony
11 Elementy w 2D
12 Ramowy element skończony
Koczubiej Podstawy mechaniki komputerowej 159/188

Elementy w 2D
Dotychczas rozpatrywaliśmy przypadki analizy metodą MES, gdzie lokalny układwspółrzędnych elementu (xe, y e) pokrywał się z globalnym układemwspółrzędnych (x , y) (przypadek 1).
xe
21u2ueu1ue
v2vev1ve
F1Fe
F2Fe
F3Fe
F4Fe
x
y
x
y xe
2
1
v2ve
v1ve
u2ue
u1ue
F2Fe
F1Fe
F4Fe
F3Fe
Przypadek 1 Przypadek 2
Rys. 49: Elementy w 2D
Koczubiej Podstawy mechaniki komputerowej 160/188

Elementy w 2D
Oznaczając elementarną sztywność elementu prętowego przez ke,
ke =E eAe
Le(256)
równania równowagi MES w przypadku pierwszym zapiszemy w znany sposób[ke −ke−ke ke
] [ue1uex
]=
[F e1F e2
]. (257)
Uwzględniając przemieszczenia i siły w kierunku osi y , układ równań będziemyrówny ⎧⎪⎪⎪⎨
⎪⎪⎪⎩
kue1 + 0ve1 − kue2 + 0v
e2 = F e1
0ue1 + 0ve1 + 0u
e2 + 0v
e2 = F e2
−kue1 + 0v e1 + kue2 + 0ve2 = F e3
0ue1 + 0ve1 + 0u
e2 + 0v
e2 = F e4
, (258)
Koczubiej Podstawy mechaniki komputerowej 161/188

Elementy w 2D
i macierzowo ⎡⎢⎢⎣
ke 0 −ke 00 0 0 0
−ke 0 ke 00 0 0 0
⎤⎥⎥⎦⎡⎢⎢⎣
ue1v e1ue2v e2
⎤⎥⎥⎦ =
⎡⎢⎢⎣
F e1F e2F e3F e4
⎤⎥⎥⎦ . (259)
Dla przypadku 2 napiszemy⎡⎢⎢⎣0 0 0 00 ke 0 −ke0 0 0 00 −ke 0 ke
⎤⎥⎥⎦⎡⎢⎢⎣
ue1v e1ue2v e2
⎤⎥⎥⎦ =
⎡⎢⎢⎣
F e1F e2F e3F e4
⎤⎥⎥⎦ . (260)
Koczubiej Podstawy mechaniki komputerowej 162/188

Elementy w 2D
Każdy z elementów ma swój lokalny układ współrzędnych. W tym układzie,równania MES wyglądają jak dla przypadku pierwszego.
x
y xe
2
1
u2uev2ve
u1uev1ve
2
1
U2Ue
V2Ve
U1Ue
V1Ve
Rys. 50: Lokalny i globalny układ współrzędnych
Musimy znaleźć sposób jak przejść pomiędzy lokalnym a globalnym układemwspółrzędnych.
Koczubiej Podstawy mechaniki komputerowej 163/188

Elementy w 2D
x
xe
yye
Rys. 51: Obrót układu współrzędnych
{x = xe cos(α)− y e sin(α)
y = xe sin(α) + y e cos(α), (261)
{xe = x cos(α) + y sin(α)
y e = −x sin(α) + y cos(α), (262)
W zapisie macierzowym[xy
]=
[cos(α) − sin(α)sin(α) cos(α)
] [xe
y e
], (263)
x = RGxe, (264)
[xe
y e
]=
[cos(α) sin(α)− sin(α) cos(α)
] [xy
], (265)
xe = RLx. (266)
Koczubiej Podstawy mechaniki komputerowej 164/188

Elementy w 2D
Spostrzeżenia:
wyznaczniki |RG | = |RL| = sin2(α) + cos2(α) ≡ 1, to znaczy, że przy obrociewektora jego długość pozostaje taka sama,
łatwo zauważyć, że RG = RTL ,
ponadto x = RGxe i xe = RLx, zatem x = RGRLx, czyli RGRL = 1, z czegowynika RG = R−1L i dodatkowo R
TL = R−1L .
Wprowadzając oznaczenie R = RL, będziemy mogli zapisać
x = RTxe, (267)
xe = Rx. (268)
Koczubiej Podstawy mechaniki komputerowej 165/188

Elementy w 2D
Zapiszmy równania transformacyjne dla przemieszczeń w węzłach elementu
x
y xe
2
1
u2uev2ve
u1uev1ve
2
1
U2Ue
V2Ve
U1Ue
V1Ve
{ue1 = Ue1 cos(α) + V e1 sin(α)
v e1 = −Ue1 sin(α) + V e1 cos(α), (269)
{ue2 = Ue2 cos(α) + V e2 sin(α)
v e2 = −Ue2 sin(α) + V e2 cos(α), (270)
i macierzowo⎡⎢⎢⎣
ue1v e1ue2v e2
⎤⎥⎥⎦ =
⎡⎢⎢⎣cos(α) sin(α) 0 0− sin(α) cos(α) 0 0
0 0 cos(α) sin(α)0 0 − sin(α) cos(α)
⎤⎥⎥⎦⎡⎢⎢⎣
Ue1V e1Ue2V e2
⎤⎥⎥⎦ , (271)
lub krótkoue = TeUe, (272)
gdzie
Te =[R 00 R
]. (273)
Koczubiej Podstawy mechaniki komputerowej 166/188

Elementy w 2D
Analogicznie dla sił węzłowychfe = TeFe, (274)
gdzie wektor fe oznacza siły węzłowe dla elementy w lokalnym układziewspółrzędnych elementu, a Fe oznacza wektor sił węzłowych dla elementuw globalnym układzie współrzędnych.
Napiszmy komplet równań transformacyjnych dla wektorów elementu
ue = TeUe, (275)
fe = TeFe, (276)
Ue = (Te)T ue, (277)
Fe = (Te)T fe. (278)
Koczubiej Podstawy mechaniki komputerowej 167/188

Elementy w 2D
Oznaczając (jak wcześniej) q ≡ u, równania równowagi w układzie lokalnymelementu będą miały postać,
keqe = fe, (279)
podstawiając je do Fe = (Te)T fe napiszemy
Fe = (Te)T keqe, (280)
i wykorzystując qe = TeQe otrzymamy
Fe = (Te)T keTeQe, (281)
albo(Te)T keTeQe = Fe, (282)
i ostatecznieKeQe = Fe, (283)
gdzieKe = (Te)T keTe, (284)
jest macierzą sztywności elementu w układzie współrzędnych globalnych.
Koczubiej Podstawy mechaniki komputerowej 168/188

Elementy w 2D
Jest to w zasadzie macierz sztywności elementu kratowego z dwoma stopniamiswobody w węźle. Ze względu na swoją prostotę, można ją napisać explicite
Ke =E eAe
Le
⎡⎣ cos2(α) cos(α) sin(α) − cos2(α) − cos(α) sin(α)
cos(α) sin(α) sin2(α) − cos(α) sin(α) − sin2(α)− cos2(α) − cos(α) sin(α) cos2(α) cos(α) sin(α)
− cos(α) sin(α) − sin2(α) cos(α) sin(α) sin2(α)
⎤⎦ ,(285)
wektor równoważników sił węzłowych wynosi
Pe =Le
2
⎡⎢⎢⎣
qex cos(α) − qey sin(α)qex sin(α) + qey cos(α)qex cos(α) − qey sin(α)qex sin(α) + qey cos(α)
⎤⎥⎥⎦ . (286)
Koczubiej Podstawy mechaniki komputerowej 169/188

Elementy w 2D
Rozwiążmy kratownicę obciążoną siłą skupioną P , zdyskretyzowaną trzemaelementami skończonymi
EA
L
=60° =60°
x
y
P
Rys. 52: Kratownica
Koczubiej Podstawy mechaniki komputerowej 170/188

Elementy w 2D
2
3
1 1
23
u1=0u1 u2
v1
v2=0
v2
v3=0u3=0
u3
v3
F1
F2
EA
L
=60° =60°
x
y
F3
F4
F5
F6
Rys. 53: Dyskretyzacja kratownicy
Zdefiniujmy globalny wektor stopni swobody i globalny wektor sił węzłowych
Q ={Q1 Q2 Q3 Q4 Q5 Q6
} ≡ {u1 v1 u2 v2 u3 v3}, (287)
F ={F1 F2 F3 F4 F5 F6
}. (288)
Koczubiej Podstawy mechaniki komputerowej 171/188

Elementy w 2D
EA
L
=60° =60°
x
y
P 2
3
1 1
23
u1=0u1 u2
v1
v2=0
v2
v3=0u3=0
u3
v3
F1
F2
EA
L
=60° =60°
x
y
F3
F4
F5
F6
W wektorze Q zawarte są:
kinematyczne (podstawowe) waruneki brzegoweQ1 ≡ u1 = Q4 ≡ v2 = Q5 ≡ u3 = Q6 ≡ v3 = 0,
niewiadome kinematyczne (pierwotne) Q2 i Q3.
W wektorze F zawarte są:
statyczne (naturalne) warunki brzegowe F2 = 0 i F3 = P ,
niewiadome statyczne (wtórna) F1, F4, F5 i F6.
Koczubiej Podstawy mechaniki komputerowej 172/188

Elementy w 2D
L1
1=0°EAF1F1 F2F1
u1u1
v1v1
F1
F1u1u2
v1v221
x1
x
y1y
F3 F4
L2
2=120°EA
x2
x
y
y2 F2F1
F2F2
u2u1
v2v1
F2F3
F4F2
u2u2
v2v2
L33=60°
x
y
EA
x3
y3
F3F1
F2F3
u3u1
v3v1
F3F3
F4F3
u3u2
v3v2
11
2 2
Rys. 54: Elementy skończone
Element Węzeł 1 Węzeł 21 1 22 2 33 1 3
Koczubiej Podstawy mechaniki komputerowej 173/188

Elementy w 2D
Układ równań MES zapiszemy w postaci⎡⎢⎢⎢⎣
K 111 + K 311 K 112 + K 312 K 113 K 114 K 313 K 314K 121 + K 321 K 122 + K 322 K 123 K 124 K 323 K 324
K 131 K 132 K 133 + K 211 K 134 + K 212 K 213 K 214K 141 K 142 K 143 + K 221 K 144 + K 222 K 223 K 224K 331 K 332 K 231 K 232 K 233 + K 333 K 234 + K 334K 341 K 342 K 241 K 242 K 243 + K 343 K 244 + K 344
⎤⎥⎥⎥⎦⎡⎢⎢⎢⎣
Q1Q2Q3Q4Q5Q6
⎤⎥⎥⎥⎦ =
=
⎡⎢⎢⎢⎣
P11 + P31P12 + P32P13 + P21P14 + P22P23 + P33P24 + P34
⎤⎥⎥⎥⎦+
⎡⎢⎢⎢⎣
F1F2F3F4F5F6
⎤⎥⎥⎥⎦ . (289)
Koczubiej Podstawy mechaniki komputerowej 174/188

Elementy w 2D
Rozwiązanie układu równań wymaga uwzględnienia warunków brzegowych
Q1 = Q4 = Q5 = Q6 = 0, F2 = 0, F3 = P , (290)
ostatecznie będziemy mogli zapisać⎡⎢⎢⎢⎣
K 111 + K 311 K 112 + K 312 K 113 K 114 K 313 K 314K 121 + K 321 K 122 + K 322 K 123 K 124 K 323 K 324
K 131 K 132 K 133 + K 211 K 134 + K 212 K 213 K 214K 141 K 142 K 143 + K 221 K 144 + K 222 K 223 K 224K 331 K 332 K 231 K 232 K 233 + K 333 K 234 + K 334K 341 K 342 K 241 K 242 K 243 + K 343 K 244 + K 344
⎤⎥⎥⎥⎦⎡⎢⎢⎢⎣0Q2Q3000
⎤⎥⎥⎥⎦ =
=
⎡⎢⎢⎢⎣
P11 + P31P12 + P32P13 + P21P14 + P22P23 + P33P24 + P34
⎤⎥⎥⎥⎦+
⎡⎢⎢⎢⎣
F10PF4F5F6
⎤⎥⎥⎥⎦ . (291)
Koczubiej Podstawy mechaniki komputerowej 175/188

Elementy w 2D
Element e = 1: E 1 = E , A1 = A, L1 = L, q1 = 0, α1 = 0,
K1 =EA
L
⎡⎢⎢⎣1 0 −1 00 0 0 0−1 0 1 00 0 0 0
⎤⎥⎥⎦ , P1 =
⎡⎢⎢⎣0000
⎤⎥⎥⎦ . (292)
Element e = 2: E 2 = E , A2 = A, L2 = L, q2 = 0, α2 = 1200,
K2 =EA
4L
⎡⎢⎢⎣
1 −√3 −1 √3
−√3 3 −√3 −3−1 −√3 1 −√3−√3 −3 −√3 3
⎤⎥⎥⎦ , P2 =
⎡⎢⎢⎣0000
⎤⎥⎥⎦ . (293)
Element e = 3: E 3 = E , A3 = A, L3 = L, q3 = 0, α3 = 600,
K3 =EA
4L
⎡⎢⎢⎣
1√3 −1 −√3√
3 3 −√3 −3−1 −√3 1
√3
−√3 −3 √3 3
⎤⎥⎥⎦ , P3 =
⎡⎢⎢⎣0000
⎤⎥⎥⎦ . (294)
Koczubiej Podstawy mechaniki komputerowej 176/188

Elementy w 2D
Układ równań MES
EA
4L
⎡⎢⎢⎢⎢⎢⎢⎣
5√3 −4 0 −1 −√3√
3 3 0 0 −√3 −3−4 0 5 −√3 −1 √
30 0 −√3 3
√3 −3
−1 −√3 −1 √3 2 0
−√3 −3 √3 −3 0 6
⎤⎥⎥⎥⎥⎥⎥⎦
⎡⎢⎢⎢⎢⎢⎢⎣
0Q2Q3000
⎤⎥⎥⎥⎥⎥⎥⎦=
⎡⎢⎢⎢⎢⎢⎢⎣
F10PF4F5F6
⎤⎥⎥⎥⎥⎥⎥⎦. (295)
Niewiadome pierwotne możemy obliczyć z równań 1 i 2
EA
4L
[3 00 5
] [Q2Q3
]=
[0P
], (296)
Q2 = 0, Q3 =4PL5EA. (297)
Koczubiej Podstawy mechaniki komputerowej 177/188

Elementy w 2D
Niewiadome wtórne wyznaczymy z równań 1, 4, 5 i 6
F1 = −4EA4L · Q3 = −4P5, (298)
F4 = −√3EA
4L· Q3 = −
√3P5, (299)
F5 = −1EA4L · Q3 = −P
5, (300)
F6 =√3EA
4L·Q3 =
√3P5. (301)
Globalny wektor przemieszczeń będzie wynosił
Q =
⎡⎢⎢⎢⎢⎢⎢⎣
Q1Q2Q3Q4Q5Q6
⎤⎥⎥⎥⎥⎥⎥⎦=
⎡⎢⎢⎢⎢⎢⎢⎣
00
4PL5EA000
⎤⎥⎥⎥⎥⎥⎥⎦, (302)
Koczubiej Podstawy mechaniki komputerowej 178/188

Elementy w 2D
a przemieszczenia w elementach w globalnym układzie współrzędnych
Q1 =
⎡⎢⎢⎣
Q1Q2Q3Q4
⎤⎥⎥⎦ =
⎡⎢⎢⎣
Q11Q12Q13Q14
⎤⎥⎥⎦ =
⎡⎢⎢⎣004PL5EA0
⎤⎥⎥⎦ , (303)
Q2 =
⎡⎢⎢⎣
Q3Q4Q5Q6
⎤⎥⎥⎦ =
⎡⎢⎢⎣
Q21Q22Q23Q24
⎤⎥⎥⎦ =
⎡⎢⎢⎣4PL5EA000
⎤⎥⎥⎦ , (304)
Q3 =
⎡⎢⎢⎣
Q5Q6Q1Q2
⎤⎥⎥⎦ =
⎡⎢⎢⎣
Q31Q32Q33Q34
⎤⎥⎥⎦ =
⎡⎢⎢⎣0000
⎤⎥⎥⎦ . (305)
Koczubiej Podstawy mechaniki komputerowej 179/188

Elementy w 2D
Przemieszczenia w elementach w lokalnych układach współrzędnych obliczymyz zależności
qe = TeQe, (306)
gdzie
Te =
⎡⎢⎢⎣cos(αe) sin(αe) 0 0− sin(αe) cos(αe) 0 0
0 0 cos(αe) sin(αe)0 0 − sin(αe) cos(αe)
⎤⎥⎥⎦ , (307)
i następnie siły węzłowefe = keqe. (308)
Element e = 1: α1 = 0,
q1 =
⎡⎢⎢⎣
q11q12q13q14
⎤⎥⎥⎦ =
⎡⎢⎢⎣1 0 0 00 1 0 00 0 1 00 0 0 1
⎤⎥⎥⎦⎡⎢⎢⎣004PL5EA0
⎤⎥⎥⎦ =
⎡⎢⎢⎣004PL5EA0
⎤⎥⎥⎦ , (309)
Koczubiej Podstawy mechaniki komputerowej 180/188

Elementy w 2D
f1 =
⎡⎢⎢⎣
f 11f 12f 13f 14
⎤⎥⎥⎦ =
EA
L
⎡⎢⎢⎣1 0 −1 00 0 0 0−1 0 1 00 0 0 0
⎤⎥⎥⎦⎡⎢⎢⎣004PL5EA0
⎤⎥⎥⎦ =
⎡⎢⎢⎣− 4P504P50
⎤⎥⎥⎦ . (310)
Element 1 jest rozciągany.
Element e = 2: α2 = 1200,
q2 =
⎡⎢⎢⎣
q21q22q23q24
⎤⎥⎥⎦ =12
⎡⎢⎢⎣−1 √3 0 0−√3 1 0 00 0 −1 √30 0 −√3 1
⎤⎥⎥⎦⎡⎢⎢⎣4PL5EA000
⎤⎥⎥⎦ =
⎡⎢⎢⎣− 2PL5AE− 2√3PL5EA00
⎤⎥⎥⎦ ,(311)
f2 =
⎡⎢⎢⎣
f 21f 22f 23f 24
⎤⎥⎥⎦ =
EA
L
⎡⎢⎢⎣1 0 −1 00 0 0 0−1 0 1 00 0 0 0
⎤⎥⎥⎦⎡⎢⎢⎣− 2PL5AE− 2√3PL5EA00
⎤⎥⎥⎦ =
⎡⎢⎢⎣− 2P502P50
⎤⎥⎥⎦ . (312)
Element 2 jest rozciągany.
Koczubiej Podstawy mechaniki komputerowej 181/188

Elementy w 2D
Element e = 3: α2 = 600,
q3 =
⎡⎢⎢⎣
q21q22q23q24
⎤⎥⎥⎦ =
⎡⎢⎢⎣0000
⎤⎥⎥⎦ , f3 =
⎡⎢⎢⎣
f 21f 22f 23f 24
⎤⎥⎥⎦ =
⎡⎢⎢⎣0000
⎤⎥⎥⎦ . (313)
x
y
P
F1F1=4P/5
F1=4P/5
F1F3=4P/5F2F1=2P/5
F2F3=2P/5
F4=√3P/5
F5=P/5
F6=√3P/5
Rys. 55: Siły w węzłach
Koczubiej Podstawy mechaniki komputerowej 182/188

Ramowy element skończony
1 Informacje ogólne
2 Uwagi wstępne
3 Sformułowanie lokalne problemu brzegowego
4 Sformułowanie globalne problemu brzegowego
5 Metoda różnic skończonych
6 Wprowadzenie do metody elementów skończonych
7 Etapy procedury MES
8 Funkcje kształtu
9 Analiza statyczna MES pręta
10 Belkowy element skończony
11 Elementy w 2D
12 Ramowy element skończony
Koczubiej Podstawy mechaniki komputerowej 183/188

Ramowy element skończony
Mając wyprowadzone zależności na macierze sztywności elementów skończonychprętowego i belkowego, możemy „złożyć” oba elementy i otrzymamy w ten sposóbelement ramowy. Takie działanie jest możliwe tylko dlatego, że przemieszczeniaw kierunku osiowym oraz ugięcie i kąt ugięcia są od siebie niezależne i mogą byćrozpatrywane oddzielnie.
qx(x)
x
z
qz(x)
L
M E A(x) J(x)P2
P1
Rys. 56: Rama
Koczubiej Podstawy mechaniki komputerowej 184/188

Ramowy element skończony
qe(xe)qx
u2ueF1Fe
qe(xe)qz
xe
ze
JeEe
21
w2wew1
φ1φe
we
Le
xe ∈ (0, Le)
F2Fe
F3FeF5Fe
φ2φeF6FeAe
u1ue F4Fe
Rys. 57: Ramowy element skończony
Zdefiniujmy wektor stopni swobody elementu Qe
Qe ={Qe1 Qe2 Qe3 Qe4 Qe5 Qe6
} ≡ {ue1 w e1 ϕe1 ue2 w2
e ϕe2}, (314)
i wektor sił węzłowych Fe
Fe ={F e1 F e2 F e3 F e4 F e5 F e6
}. (315)
Koczubiej Podstawy mechaniki komputerowej 185/188

Ramowy element skończony
0
0 0 0 0
= +
0
0 0
0
0 0 0 0
0
0 0
3
2
1
6
5
4
1 1 1 12 3 4 5 6Ke(p)K11 Ke(p)K12
Ke(p)K21 Ke(p)K22
K Q P F
P1Pe(p)
P2Pe(p)
Ke(b)K11 Ke(b)K12 Ke(b)K13 Ke(b)K14
Ke(b)K24Ke(b)K23Ke(b)K22Ke(b)K21
Ke(b)K31
Ke(b)K41
Ke(b)K32
Ke(b)K42
Ke(b)K33 Ke(b)K34
Ke(b)K43 Ke(b)K44
Pe(b)P1
Pe(b)P2
Pe(b)P3
Pe(b)P4
F1Fe(p)
F2Fe(p)
Fe(b)F1
Fe(b)F2
Fe(b)F3
Fe(b)F4
Q3
Q4
Q5
Q6
Q2
Q1
Rys. 58: Złożenie macierzy sztywności i wektorów elementów prętowego i belkowego
Koczubiej Podstawy mechaniki komputerowej 186/188

Ramowy element skończony
Ostateczne wzory na macierz sztywności i wektor równoważników obciążeniaelementu ramowego
Ke =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
E eAe
Le0 0 −E eAe
Le0 0
012E eJe
(Le)36E eJe
(Le)20 −12E
eJe
(Le)36E eJe
(Le)2
06E eJe
(Le)24E eJe
Le0 −6E
eJe
(Le)22E eJe
Le
−E eAe
Le0 0
E eAe
Le0 0
0 −12EeJe
(Le)3−6E
eJe
(Le)20
12E eJe
(Le)3−6E
eJe
(Le)2
06E eJe
(Le)22E eJe
Le0 −6E
eJe
Le4E eJe
Le
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
Pe =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
qex Le
2qezLe
2qez(L
e)2
12qex Le
2qezLe
2
−qez(Le)2
12
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
.
(316)
Koczubiej Podstawy mechaniki komputerowej 187/188

Ramowy element skończony
Macierz trznsformacji dla ramowego elementu skończonego
Te =
⎡⎢⎢⎢⎢⎢⎢⎣
cos(α) sin(α) 0 0 0 0− sin(α) cos(α) 0 0 0 0
0 0 1 0 0 00 0 0 cos(α) sin(α) 00 0 0 − sin(α) cos(α) 00 0 0 0 0 1
⎤⎥⎥⎥⎥⎥⎥⎦, (317)
i do kompletu
Ke = (Te)T keTe, Qe = (Te)T qe, Fe = (Te)T fe. (318)
Koczubiej Podstawy mechaniki komputerowej 188/188




![Technik teleinformatyk 312[02].O1.05 n - Jasło...Modułowy program nauczania: Technik teleinformatyk 312[02] Moduł: Podstawy mechaniki i elektrotechniki 312[02].O1 Jednostka modułowa:](https://img.pdfslide.tips/doc/110x75/5f8bc9c25b988448cb49a3ad/technik-teleinformatyk-31202o105-n-jaso-moduowy-program-nauczania.jpg)