-
- Kanon fizyki WAT, Wydział Nowych Technologii i Chemii,
Instytut Fizyki TechnicznejW-02
2. Fizyczne podstawy mechaniki - I
2.1. Kinematyka:
• ruch w trzech wymiarach,
• parametryczne równania toru,
• prędkość,
• przyśpieszenie
- przyspieszenie styczne i normalne do toru ruchu,
• niezmienniczość Galileusza,
• układy inercjalne i nieinercjalne.
-
Kinematyka – dział mechaniki, zajmujący się ruchem ciał, bez
uwzględniania ich
masy oraz rozpatrywania przyczyn wywołujących ruch ciała.
Podstawowe pojęcia
Podstawowe zadanie kinematyki: znalezienie kinematycznego
równania
ruchu, czyli zależności współrzędnych ciała od czasu, a także
parametrów ruchu
ciała: przebytej drogi, prędkości, przyspieszenia i położenia w
danej chwili czasu.
Ciało – obiekt materialny, czyli obdarzony masą.
Modele ciała – możliwość pominięcia pewnych rodzajów ruchu, np.
ruchu
obrotowego lub drgającego:
▪ Punkt materialny – punkt matematyczny, w którym skupiona jest
pewna masa
– np. samolot na ekranie radaru.
▪ Bryła sztywna – ciało o pewnej masie zajmujące pewną stałą
objętość i kształt
– np. samolot na lotnisku.
▪ Bryła elastyczna – np. samolot w locie. 3
-
Względność ruchu
Ruch jest zjawiskiem względnym i może być rozpatrywany jedynie
względem
innego ciała lub układu ciał.
Układ odniesienia – układ współrzędnych dowiązany do pewnego
ciała lub
układu ciał, zaopatrzonego dodatkowo w zegar do pomiaru
czasu.
Wybór układu odniesienia należy do nas i powinien upraszczać
rozwiązanie
zagadnienia.
W. Moebs, S. J. Ling, J. Sanny, Fizyka dla szkół wyższych, t.1,
openstax, Polska, 2018
Położenie rowerzystek można podać
względem:
- ulicy, budynków,
- samochodów czy
- względem siebie nawzajem.
Ich ruch można opisać poprzez poło-
żenie oraz przemieszczenie w wybra-
nym układzie odniesienia. 4
-
Ruch w trzech wymiarachPołożenie – względem wybranego układu
współrzędnych (ciała) – gdzie jestem?
Ruch – zmiana położenia: w jakim kierunku,
jak szybko, w jaki sposób?
Wektor (promień) wodzący – wektor
wyprowadzony z początku przyjętego układu
odniesienia do punktu położenia ciała w danej
chwili czasu.
Przemieszczenie – zmiana położenia w czasie.
z
x
y
P1P2
r1r2
xy
z
𝒓 = 𝑥2 + 𝑦2 + 𝑧2
Wektory wodzące r1 i r2 dla położeń ciała odpowiednio P1(t) i
P2(t); x≡ i, y ≡ j, z ≡ k
wersory, czyli wektory jednostkowe osi (długość = 1, kierunek i
zwrot odpowiedniej
osi).
Zmiana położenia między P1 i P2: r2 – r1
5
Ԧ𝑟 ≡r
UWAGA:
-
6
Kinematyczne równanie ruchu przedstawia
wektor wodzący punktu r(t) zapisany w
kartezjańskim układzie współrzędnych jako:
gdzie x(t), y(t), z(t) są skalarnymi postaciami
kinematycznego równania ruchu, natomiast
i, j, k są wspomnianymi wersorami osi
kartezjańskiego układu współrzędnych,
odpowiednio: Ox, Oy i Oz. Parametrem w tych
równaniach jest czas t.
Parametryczne równania toru
𝒓 𝑡 = 𝑥 𝑡 𝒊 + 𝑦 𝑡 𝒋 + 𝑧 𝑡 𝒌
Tor ruchu (trajektoria) ciała – miejsce geometryczne kolejnych
położeń ciała.
-
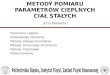
W. Moebs, S. J. Ling, J. Sanny, Fizyka dla szkół wyższych, t.1,
openstax, Polska, 2018;
Krzywe balistyczne przy takim samym kącie
wystrzału i masie, lecz różnych prędkościach
początkowych.
Eliminując z tych równań czas otrzymamy równanie toru ruchu
punktu.
Tory lotu piłki golfowej uderzone pod różnymi
kątami, ale o tym samym zasięgu, równym 90 m.
7
-
Podstawowe rodzaje ruchu
Postępowy
Prostoliniowy Krzywoliniowy
Jednostajny Zmienny
Jednostajnie Niejednostajnie
Obrotowy
Jednostajny Zmienny
Jednostajnie Niejednostajnie
8
-
Szybkość średnia – stosunek całkowitej drogi (przemieszczenia) i
całkowitego
czasu potrzebnego do pokonania tej drogi.
Szybkość i prędkość
Jest to wielkość skalarna wyrażana w [m/s].
Wygodna miara zmian drogi w czasie, używają jej kierowcy, żeby
określić czas, po
którym dotrą do wyznaczonego celu od momentu rozpoczęcia
podróży. Ale w którą
stronę świata jedziemy?
vśr = całkowita droga/całkowity czas = Ds/Dt
Niech w chwili czasu t1 ciało znajduje się w położeniu x1, a w
chwili t2 w położeniu x2.
Prędkość średnia ഥ𝒗 wynosi: ഥ𝒗 =𝒙2− 𝒙1
𝑡2−𝑡1=
∆𝒙
∆𝑡[𝑚
𝑠]
To jest wielkość wektorowa – dlaczego?
Bo podaje nie tylko wartość szybkości ruchu, ale także jej
kierunek i zwrot.
A dlaczego droga jest tu wektorem?9
-
Prędkość chwilowa oraz pokonana droga
Prędkość chwilowa – ciągła funkcja czasu, informacja o wektorze
prędkości cząstki
w dowolnym punkcie i dowolnej chwili jej ruchu.
Obliczamy ją jako pochodną po czasie zależności położenia od
czasu. Dla przypadku
ruchu jednowymiarowego w kierunku osi x:
Znając zależność prędkości chwilowej ciała od czasu możemy
obliczyć drogę
pokonaną przez to ciało. Stała całkowania C ma tu sens fizyczny
drogi początkowej
s0.
𝑠 = 𝑥(𝑡) = 𝑥2 − 𝑥1 = න𝒗 𝑡 𝑑𝑡 + 𝐶
𝑠 = 𝑥(𝑡) = 𝑥2 − 𝑥1 = න𝑥1
𝑥2
𝒗 𝑡 𝑑𝑡
Ale znając położenie początkowe i końcowe można zapisać
(dlaczego?):
𝒗 𝑡 = lim∆𝑡→0
𝒙 𝑡+∆𝑡 −𝒙 𝑡
∆𝑡=
𝑑𝒙
𝑑𝑡[𝑚
𝑠]
10
-
Prędkość chwilowa i szybkość średniaCzy tych panów interesuje
szybkość średnia czy
prędkość chwilowa?
https://commons.wikimedia.org/wiki/File:ULTRALYTE_983.8_m.jpg?uselang=pl
Prędkość w ruchu krzywoliniowym
W ruchu krzywoliniowym wektor prędkości zmienia swój kierunek w
czasie;
w celu jednoznacznego opisu można go rozłożyć na dwie
składowe:
𝒗 𝑡 = 𝒗𝑟 + 𝒗𝑡
prędkość styczną (wzdłuż trajektorii) vt, skierowaną lokalnie
prostopadle do
wektora wodzącego r poruszającego się ciała, prędkość
normalną
(poprzeczną) vr, skierowaną równolegle do wektora wodzącego
r.11
https://commons.wikimedia.org/wiki/File
-
Obliczanie prędkości na podstawie wykresu x(t)
W przedziale czasu ciało oddala się od początku układu
współrzędnych –
prędkość jest dodatnia. W kolejnym przedziale czasu , położenie
się nie
zmienia, prędkość jest zerowa. Natomiast dla przedziału czasu
ciało
porusza się wstecz, w stronę początku układu współrzędnych – ma
wtedy przeciwny
kierunek ruchu oraz ujemną prędkość.
W. Moebs, S. J. Ling, J. Sanny, Fizyka dla szkół wyższych, t.1,
openstax, Polska, 2018
M-4
12
-
Przyspieszenie
Przyspieszenie a – miara zmiany prędkości v(t) w czasie.
𝒂 𝑡 =𝑑𝒗 𝑡
𝑑𝑡
m
s2
W ruchu jednostajnie zmiennym przyspieszenie jest stałe:
𝒂(𝑡) =𝑑𝒗(𝑡)
𝑑𝑡= const
𝒂 > 0 – prędkość rośnie – ruch przyspieszony
𝒂 < 0 – prędkość maleje – ruch opóźniony
Dlatego wygodnie jest rozłożyć wektor a na dwie składowe: as
lokalnie styczną
(przyspieszenie styczne) do toru ciała, która odpowiada za
zmianę wartości
prędkości i an lokalnie normalną (przyspieszenie normalne) do
toru ciała, która
odpowiada za zmiany kierunku prędkości.
𝒂 = 𝒂𝑠 + 𝒂𝑛
W ruchu krzywoliniowym wektor przyspieszenia a nie jest zgodny z
wektorem
prędkości. Opisuje nie tylko zmianę wartości prędkości, ale
także jej kierunku.
13
-
Rozpatrzmy ruch jednostajny po okręgu i wybierzemy początek
kartezjańskiego
układu współrzędnych w środku okręgu.
W tym przypadku wektor wodzący punktu materialnego jest równy
promieniowi
okręgu. Przyspieszenie as jest zawsze styczne do okręgu,
przyspieszenie an zawsze
prostopadłe do okręgu.
Szybkość jest stała, ale prędkość zmienna w czasie, bo zmienia
się jej kierunek.
14
-
Przyspieszenie styczne i normalne – ruch po okręgu
Jak widać liniowe wektory: prędkość v i przyspieszenie a są
zmienne nawet dla
ruchu jednostajnego po okręgu. Dlatego dla ruchu po okręgu
zamiast drogi liniowej
s wygodnie jest wprowadzić drogę kątową a, czyli kąt zakreślany
przez wektor
wodzący poruszającego się punktu.
Konsekwentnie wprowadzamy pojęcie prędkości kątowej w oraz
przyspieszenia
kątowego e:
𝛚 =d𝛂
d𝑡
𝑟𝑎𝑑
𝑠; 𝛆 =
d𝝎
d𝑡=d2𝛂
d𝑡2𝑟𝑎𝑑
𝑠2𝒗 = 𝝎 × 𝒓
Uwaga:
wektory prędkości kątowej oraz przyspieszenia kątowego są
prostopadłe do płaszczyzny ruchu ciała.
W przypadku ruchu jednostajnego po okręgu:
|𝒗 𝑡 | = 𝑐𝑜𝑛𝑠𝑡 𝝎(𝑡) = 𝑐𝑜𝑛𝑠𝑡 15
-
Niezmienniczość Galileusza
x
y
z
x’
y’
z’
OO’
vo
P(x,y,z) = P(x’,y’,z’)
vo t
Rozważmy układ Oxyz pozostający w spoczynku oraz układ O’x’y’z’
poruszający się
wzdłuż osi x układu O ze stałą prędkością v0=const (czyli ruch
jednostajny
jednowymiarowy).
Dla chwili czasu t0 układy O i O’ są tożsame. Ponadto
założymy, że czas w obu układach płynie tak samo,
czyli t’ = t.
Między układami O i O’ istnieją następujące związki
współrzędnych:
które razem z warunkiem jednakowego upływu czasu tworzą tzw.
transformację
(przekształcenie) Galileusza. Znak „+/-”zależy od tego, w którą
stronę osi Ox
porusza się układ ruchomy.
𝑥′ = 𝑥 ± 𝑣0𝑡; 𝑦′ = 𝑦; 𝑧′ = 𝑧,
Transformacja Galileusza umożliwia przeliczenie parametrów ruchu
z
nieruchomego układu odniesienia do układu poruszającego się lub
odwrotnie.16
-
𝑣𝑥′ 𝑡 =
d𝑥 ,
d𝑡=d 𝑥 𝑡 − 𝑣0𝑡
d𝑡=d𝑥(𝑡)
d𝑡− 𝑣0 = 𝑣𝑥 𝑡 − 𝑣0
gdzie v0 jest prędkością poruszania się układu ruchomego
względem układu
nieruchomego.
Jeżeli punkt P ma w układzie O prędkość:
to różniczkując transformację Galileusza otrzymamy prędkość tego
punktu w układzie
O’:
𝒗 = 𝒗𝑥 + 𝒗𝑦+ 𝒗𝑧
𝒂𝑥′ 𝑡 =
d𝒗𝑥′
d𝑡=d 𝒗𝑥 𝑡 − 𝒗0
d𝑡=d𝒗𝑥(𝑡)
d𝑡= 𝒂𝑥(𝑡)
𝒂𝑦′ 𝑡 =
d𝒗𝑦′
d𝑡=
d𝒗𝑦(𝑡)
d𝑡= 𝒂𝑦(𝑡) 𝒂𝑧
′ 𝑡 =d𝒗𝑧
′
d𝑡=
d𝒗𝑧(𝑡)
d𝑡= 𝒂𝑧(𝑡)
A ponieważ założyliśmy ruch tylko wzdłuż osi Ox, to:
Różniczkując prędkość otrzymamy z kolei przyspieszenie punktu w
układzie O’
Transformacja Galileusza jest niezmiennicza względem
przyspieszenia
i oczywiście czasu (bo to założyliśmy). a’(t) = a(t) t’ = t
17
-
Układy inercjalne i nieinercjalne
Układ inercjalny – układ odniesienia poruszający się ruchem
jednostajnym
prostoliniowym lub pozostający w spoczynku względem innego
układu.
Zasada względności Galileusza: wszystkie układy, które poruszają
się
względem siebie bez przyśpieszenia, czyli ruchem jednostajnym
prostoliniowym,
są równoważne mechanicznie.
Jeśli układ O1 porusza się względem układu O2 ze stałą
prędkością, to przyśpieszenie punktu materialnego jest w
obu układach jednakowe.
𝑑𝒗12𝑑𝑡
= 0 → 𝒂1= 𝒂2
Układ nieinercjalny – układ odniesienia poruszający się ruchem
prostoliniowym
zmiennym lub krzywoliniowym względem innego układu.
W tym przypadku nie jest spełniona zasada względności
Galileusza. Na ciało w
nieinercjalnym układzie odniesienia działają przyspieszenia
pozorne. Zjawisko to
nazywamy bezwładnością ciała, czyli tendencją ciała do
zachowania stanu ruchu.18
-
Nie inercjalność wynikająca z obrotu
Ziemi 𝑎 =
v2
𝑅𝑧= 𝜔2𝑅𝑧 =
4𝜋2𝑅𝑧𝑇2
≈ 3,4 ⋅ 10−2m/s2
Nie inercjalność wynikająca z ruchu wokół
Słońca (v=30 km/s, R=150.106 km)𝑎 =v2
𝑅≈ 6 ⋅ 10−3m/s2
Nie inercjalność wynikająca z ruchu Słońca
wokół Galaktyki (v=300 km/s R=3.1020 m) 𝑎 =v2
𝑅≈ 3 ⋅ 10−10m/s2
Wg Macha jedynie układ odległych gwiazd stałych jest w miarę
dobrym
układem inercjalnym.
Gdy w nieinercjalnym układzie odniesienia obracającym się
jednostajnie z prędkością kątową w porusza się ciało ruchem
jednostajnym prostoliniowym z prędkością v, to nieruchomy
obserwator zewnętrzny widzi, że tor ruchu jest krzywoliniowy
–
za chwilę (KF-04) określimy to jakby na ciało działała pewna
siła
nazywana siłą Coriolisa FC.
https://pl.wikipedia.org/wiki/Efekt_Coriolisa#/media/File:Corioliskraftanimation.gif
Ziemia jest takim nieinercjalnym układem
obracającym się (z W na E) układem odniesie-
nia. Dlatego tor ciała poruszającego się np. od
równika ku biegunowi północnemu ulegają
nieznacznemu odchyleniu w kierunku E.
Skutki: cyklony, podmywanie brzegów rzek,
odchylenie od pionu spadających swobodnie
przedmiotów.
19
-
Podsumowanie
1. Poznaliśmy podstawowe definicje i wielkości związane z ruchem
ciał, czyli
podstawy kinematyki.
2. Zaniedbaliśmy rozmiary ciała stosując model punktu
materialnego, co pozwala
nam ograniczyć się do najprostszych przypadków ruchu.
3. Wiemy, że dla opisu ruchu ciała konieczne jest wprowadzenie
układu
odniesienia.
4. Wprowadziliśmy pojęcie układu inercjalnego i pojęcie
niezmienniczości
Galileusza.
5. Potrafimy określić rodzaj ruchu i wyznaczyć prędkość oraz
przyspieszenie
ciała w tym ruchu.
6. W opisie kinematycznym pominęliśmy również przyczyny
wywołujące ruch
ciała. Tym zagadnieniem zajmiemy się w wykładzie K-04. 20
-
21