Embed Size (px)
Citation preview
:
A. M. Robin
(2,4); M. V. Mackern ; M. L. Mateo ; A. V. Calori ; y M. F. Camisay (1, 3) (1,2,4) (1,3,4) (3,4)
LA RED SIRGAS CON y las observaciones GPS, GLONASS y GPS + GLONASS. Análisis de precisiones.
(1) Facultad de Ingeniería. Universidad Nacional de Cuyo (GGG-CIMA), Mendoza, Argentina.(2) Instituto Argentino de Nivología, Glaciología y Ciencias Ambientales, Mendoza, Argentina.
(3) Facultad de Ingeniería. Universidad Juan A. Maza, Mendoza, Argentina.(4) Consejo Nacional de Investigaciones Científicas y Tecnológicas.
250˚
250˚
255˚
255˚
260˚
260˚
265˚
265˚
270˚
270˚
275˚
275˚
280˚
280˚
285˚
285˚
290˚
290˚
295˚
295˚
300˚
300˚
305˚
305˚
310˚
310˚
315˚
315˚
320˚
320˚
325˚
325˚
330˚
330˚
-65˚ -65˚
-60˚ -60˚
-55˚ -55˚
-50˚ -50˚
-45˚ -45˚
-40˚ -40˚
-35˚ -35˚
-30˚ -30˚
-25˚ -25˚
-20˚ -20˚
-15˚ -15˚
-10˚ -10˚
-5˚ -5˚
0˚ 0˚
5˚ 5˚
10˚ 10˚
15˚ 15˚
20˚ 20˚
25˚ 25˚
30˚ 30˚
0 500 1000
km
AZUE
BAVC
BOAV
BOMJ
CEFT
DAVI
GOJA
IGN1
IMPZMABA
MGBHMGUB
MSCG
MSDO
MTBA
MTCOMTSF
OHIG
PISR
PPTE
RECF
RNMO
SALU
UFPR
ALAR
ALUM
ANTC
AREQ
AUTF
AZUL
BABRBAIR
BCAR
BOGT
BRAZ
BRFT
BUE2
CALL
CATA
CEEU
CEFE
CHPI
CONZ
COPO
COYQ
CRO1
CSLO
CUEC
EBYP
ESMR
ESQU
GVAL
GYEC
IBAG
IGM1
ILHA
IMBT
IQQE
IQUI
ISPA JBAL
KOUR
LHCL
LPGS
MA01
MANA
MCLA
MECO
MGIN
MGMC
MGRP
MGVA
MPL2
MZACMZAE
NEIA
OHI2
ONRJOURI
PAIT
PALM
PARC
PBCG
POAL
POLI
POVE
PRGU
PTEC
RIO2
RIOD
RIOH
RIOP
RJCG
ROCD
ROJI
ROSA
RWSN
SANT
SCCHSCLA
SCRZ
SCUB
SJRP
SL01
SPARSPCA
SRLP
SRZN
SSA1
SVIC
TERO
TUCU
UBA1
UCOR
UNRO
UNSA
UNSJ
URUS
UYDU
UYLPUYMO
UYPA
UYROUYSO
UYTA
VALP
VBCA
VICOYCBA
CFAG
GLPS
MOTE
PDE2
SALV
FALK
LRECMTECSTEC
CHAC
GUAY
MZSR
NESA
PRNA
UNPA
ACTIVAS 7-2011 (107 EP)INACTIVAS (5 EP)NUEVAS (10 EP)
GLONASS (71 EP)
Introducción: Razones que llevan a incursionar en el procesamiento de GPS y GLONASS:
- Estabilidad y operatividad de GPS durante tres décadas. Se conocen precisiones y limitaciones, en cuanto a la cantidad de satélites y área de cobertura.
- Aparición y consolidación de GLONASS durante el último año, llegando a contar con 24 satélites operativos.
- Coexistencia de ambos sistemas duplica la cantidad total de satélites, mejorando la cobertura espacial. - Receptores que captan ambas señales y de programas que permiten el procesa-miento de ambas técnicas, por separado y combinadas, ofrecen al usuario nuevas po-sibilidades.
Objetivo: Comprobar la precisión en el posicionamiento de la red SIRGAS-CON, obtenida de procesar las observaciones GLONASS exclusivamente, GPS y GPS + GLONASS en conjunto.
GLONASS GPS Número de Satélites 24 31 Planos Orbitales 3 6 Inclinación de Orbitas 54.8 55 Satélites por plano orbital 8 4 Altitud de orbita 25.540 km 20.180 km Periodo de orbita 11:15:44 11:58:00 Efemérides Pos / vel / Acc Keplerian
Elipsoide de referencia PZ90
Semieje mayor a = 6 378 136 1/f = 298.257 839 303
WGS 84 Semieje mayor a = 6 378 137
1/f = 298.257 223 563 Frecuencia L1 1602MHz + n 9/16 MHz 1575,42 Frecuencia L2 1246MHz + n 7/16 MHz 1227.60
Tabla 1. Características de los sistemas GPS y GLONASS. [Fernando Sahuquillo TOPCON ESPAÑA, S.]
MetodologíaSe procesaron 20 semanas: desde la 1635 (08/05/2011) a 1654 (24/09/2011).
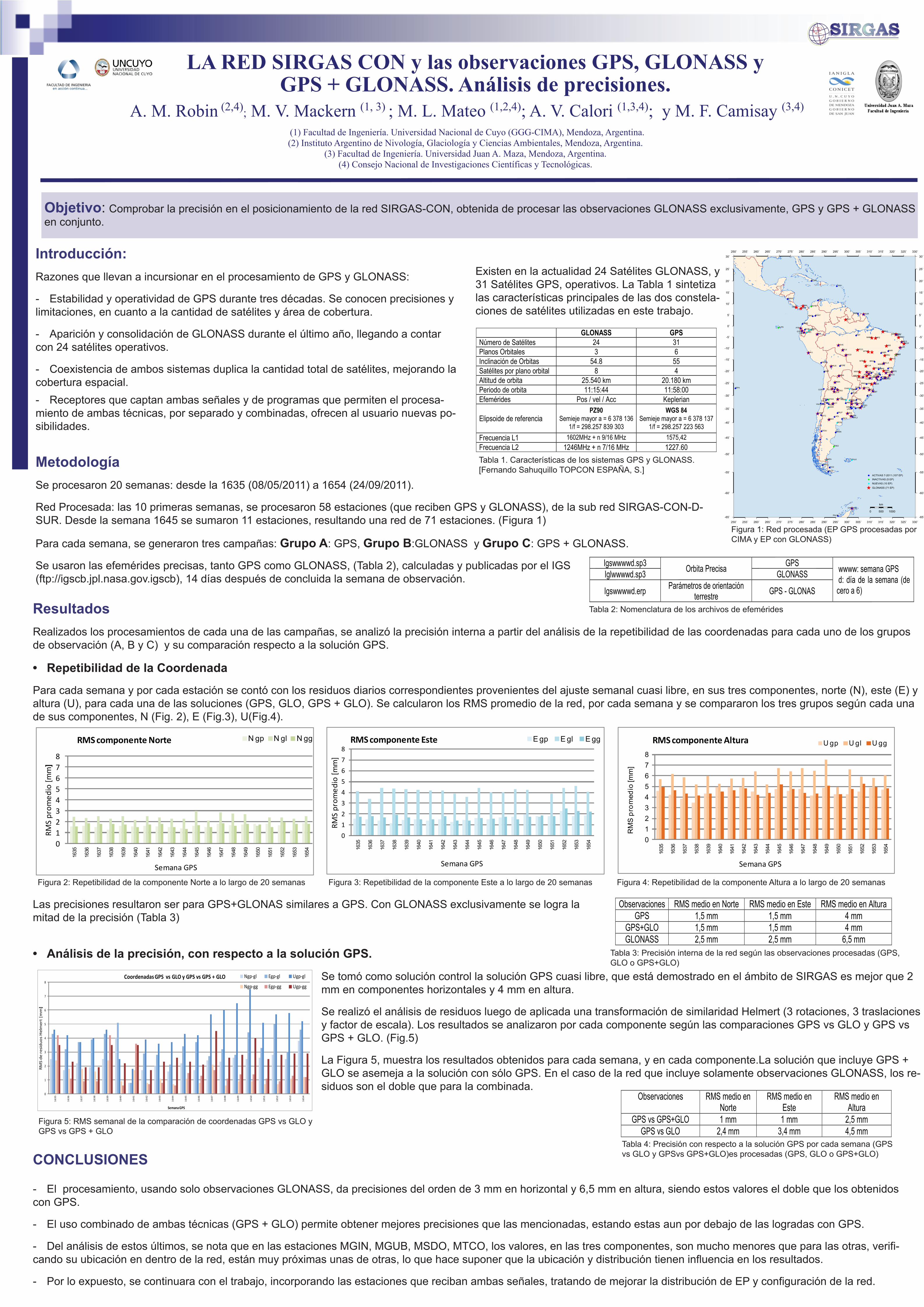
Red Procesada: las 10 primeras semanas, se procesaron 58 estaciones (que reciben GPS y GLONASS), de la sub red SIRGAS-CON-D-SUR. Desde la semana 1645 se sumaron 11 estaciones, resultando una red de 71 estaciones. (Figura 1)
Para cada semana, se generaron tres campañas: Grupo A: GPS, Grupo B:GLONASS y Grupo C: GPS + GLONASS.
Se usaron las efemérides precisas, tanto GPS como GLONASS, (Tabla 2), calculadas y publicadas por el IGS (ftp://igscb.jpl.nasa.gov.igscb), 14 días después de concluida la semana de observación.
Figura 1: Red procesada (EP GPS procesadas por CIMA y EP con GLONASS)
Igswwwwd.sp3 Orbita Precisa GPS wwww: semana GPS d: día de la semana (de cero a 6)
Iglwwwwd.sp3 GLONASS
Igswwwwd.erp Parámetros de orientación terrestre GPS - GLONAS
Tabla 2: Nomenclatura de los archivos de efeméridesResultadosRealizados los procesamientos de cada una de las campañas, se analizó la precisión interna a partir del análisis de la repetibilidad de las coordenadas para cada uno de los grupos de observación (A, B y C) y su comparación respecto a la solución GPS.
• Repetibilidad de la Coordenada
Para cada semana y por cada estación se contó con los residuos diarios correspondientes provenientes del ajuste semanal cuasi libre, en sus tres componentes, norte (N), este (E) y altura (U), para cada una de las soluciones (GPS, GLO, GPS + GLO). Se calcularon los RMS promedio de la red, por cada semana y se compararon los tres grupos según cada una de sus componentes, N (Fig. 2), E (Fig.3), U(Fig.4).
Observaciones RMS medio en Norte RMS medio en Este RMS medio en Altura GPS 1,5 mm 1,5 mm 4 mm
GPS+GLO 1,5 mm 1,5 mm 4 mm GLONASS 2,5 mm 2,5 mm 6,5 mm
Se tomó como solución control la solución GPS cuasi libre, que está demostrado en el ámbito de SIRGAS es mejor que 2 mm en componentes horizontales y 4 mm en altura.
Se realizó el análisis de residuos luego de aplicada una transformación de similaridad Helmert (3 rotaciones, 3 traslaciones y factor de escala). Los resultados se analizaron por cada componente según las comparaciones GPS vs GLO y GPS vs GPS + GLO. (Fig.5)
La Figura 5, muestra los resultados obtenidos para cada semana, y en cada componente.La solución que incluye GPS + GLO se asemeja a la solución con sólo GPS. En el caso de la red que incluye solamente observaciones GLONASS, los re-siduos son el doble que para la combinada.
Existen en la actualidad 24 Satélites GLONASS, y 31 Satélites GPS, operativos. La Tabla 1 sintetiza las características principales de las dos constela-ciones de satélites utilizadas en este trabajo.
Las precisiones resultaron ser para GPS+GLONAS similares a GPS. Con GLONASS exclusivamente se logra la mitad de la precisión (Tabla 3)
• Análisis de la precisión, con respecto a la solución GPS.
Observaciones RMS medio en Norte
RMS medio en Este
RMS medio en Altura
GPS vs GPS+GLO 1 mm 1 mm 2,5 mm GPS vs GLO 2,4 mm 3,4 mm 4,5 mm
CONCLUSIONES
- El procesamiento, usando solo observaciones GLONASS, da precisiones del orden de 3 mm en horizontal y 6,5 mm en altura, siendo estos valores el doble que los obtenidos con GPS.
- El uso combinado de ambas técnicas (GPS + GLO) permite obtener mejores precisiones que las mencionadas, estando estas aun por debajo de las logradas con GPS.
- Del análisis de estos últimos, se nota que en las estaciones MGIN, MGUB, MSDO, MTCO, los valores, en las tres componentes, son mucho menores que para las otras, verifi-cando su ubicación en dentro de la red, están muy próximas unas de otras, lo que hace suponer que la ubicación y distribución tienen influencia en los resultados.
- Por lo expuesto, se continuara con el trabajo, incorporando las estaciones que reciban ambas señales, tratando de mejorar la distribución de EP y configuración de la red.
012345678
1635
1636
1637
1638
1639
1640
1641
1642
1643
1644
1645
1646
1647
1648
1649
1650
1651
1652
1653
1654
RMS
prom
edio
[mm
]
Semana GPS
RMS componente Norte N gp N gl N gg
012345678
1635
1636
1637
1638
1639
1640
1641
1642
1643
1644
1645
1646
1647
1648
1649
1650
1651
1652
1653
1654
RMS
prom
edio
[mm
]
Semana GPS
RMS componente Este E gp E gl E gg
012345678
1635
1636
1637
1638
1639
1640
1641
1642
1643
1644
1645
1646
1647
1648
1649
1650
1651
1652
1653
1654
RM
S pr
omed
io [m
m]
Semana GPS
RMS componente Altura U gp U gl U gg
0
1
2
3
4
5
6
7
8
16
35
16
36
16
37
16
38
16
39
16
40
16
41
16
42
16
43
16
44
16
45
16
46
16
47
16
48
16
49
16
50
16
51
16
52
16
53
16
54
RMS
de r
esid
uos
Hel
mer
t [m
m]
Semana GPS
Coordenadas GPS vs GLO y GPS vs GPS + GLO Ngp-gl Egp-gl Ugp-gl
Ngp-gg Egp-gg Ugp-gg
Tabla 3: Precisión interna de la red según las observaciones procesadas (GPS, GLO o GPS+GLO)
Figura 2: Repetibilidad de la componente Norte a lo largo de 20 semanas Figura 3: Repetibilidad de la componente Este a lo largo de 20 semanas
Figura 5: RMS semanal de la comparación de coordenadas GPS vs GLO y GPS vs GPS + GLO
Figura 4: Repetibilidad de la componente Altura a lo largo de 20 semanas
Tabla 4: Precisión con respecto a la solución GPS por cada semana (GPS vs GLO y GPSvs GPS+GLO)es procesadas (GPS, GLO o GPS+GLO)