Embed Size (px)
DESCRIPTION
fr
Citation preview

Druga vežba
RAČUNARSKA SIMULACIJA POGONA SA TROFAZNIM ASINHRONIM MOTOROM
1. UVOD
Cilj vežbe jeste analiza rada asinhronog pogona pomoću računarske simulacije. Analiza je zasnovana na dinamičkom matematičkom modelu asinhrone mašine koji predstavlja skup diferencijalnih i algebarskih jednačina. Za pisanje ovih jednačina potrebno je najpre izvršiti transformaciju koordinata iz originalnog abc domena u tzv. qd0 domen. U okviru vežbe koristićemo gotov model asinhronog motora iz programskog paketa MATLAB. U prvom delu vežbe biće analiziran rad asinhronog motora napajanog direktno iz distributivne mreže: puštanje u rad, opterećivanje, kočenje, uticaj promene napona i frekvencije. Drugi deo vežbe odnosi se na asinhrone pogone sa podesivom brzinom. Simulacijama je potrebno sprovesti analizu rada aisnhronog motora napajanog iz naponskog invertora sa širinsko-impulsnom modulacijom (Pulse Width Modulation- PWM). Kompletan pogon (motor, pretvarač i upravljački sistem) modelovan je korišćenjem Simulink blokova i modela iz SimPowerSystems blockset-a. 2. PRIPREMA ZA VEŽBU
2.1. Matematički model asinhronog motora
Jednačine naponske ravnoteže u originalnom, faznom domenu su:
abcsabcssabcs ψiRutd
d+= , (1)
abcrabcrrabcr ψiRutd
d+= , (2)
gde su: ( ) [ ]csbsas
Tabcs uuu=u - vektor napona statora,
( ) [ ]crbrarT
abcr uuu=u - vektor napona rotora,

2 Druga vežba
( ) [ ]csbsasT
abcs iii=i - vektor struja statora,
( ) [ ]crbrarT
abcr iii=i - vektor struja rotora,
( ) [ ]csbsasT
abcs ΨΨΨ=ψ - vektor flukseva statora,
( ) [ ]crbrarT
abcr ΨΨΨ=ψ - vektor flukseva rotora, [ ]ssss rrrdiag=R - matrica otpornosti namotaja statora, [ ]rrrr rrrdiag=R - matrica otpornosti namotaja rotora.
pri čemu se podrazumeva da su sve rotorske veličine svedene na stator.
Usvajajući pretpostavku o linearnosti magnetnog kola motora, jednačine za flukseve mogu se izraziti u obliku:
( )
=
abcr
abcs
rT
sr
srs
abcr
abcs
ii
LLLL
ψψ
, (3)
gde su Ls, Lr i Lsr matrice induktivnosti statora, rotora i matrica međusobnih induktivnosti, respektivno:
+−−
−+−
−−+
=
mslsmsms
msmslsms
msmsmsls
s
LLLL
LLLL
LLLL
21
21
21
21
21
21
L , (4)
+−−
−+−
−−+
=
mrlrmrmr
mrmrlrmr
mrmrmrlr
r
LLLL
LLLL
LLLL
21
21
21
21
21
21
L , (5)

−+
+−
−+
=
rrr
rrr
rrr
mssr
((
((
((
L
θπθπθ
πθθπθ
πθπθθ
cos)3
2cos)3
2cos
)3
2coscos)3
2cos
)3
2cos)3
2coscos
L . (6)
U matricama induktivnosti, Lls i Lms predstavljaju induktivnost rasipanja i induktivnost magnećenja statorskog namotaja, Llr i Lmr predstavljaju induktivnost rasipanja i induktivnost magnećenja rotorskog namotaja, θr predstavlja ugao između osa namotaja statora i rotora. Naponske jednačine u domenu faznih veličina konačno se mogu napisati u obliku:
( )
+
+=
abcr
abcs
rrsr
srss
abcr
abcs
tt
ttii
LRL
LLR
uu
dd
dd
dd
dd
T. (7)
Jednačina mehaničke ravnoteže ima oblik:
−−= ωω
Pk
mmJP
ttr
medd , (8)
gde je : me - elektromagnetni momenat,
mm - momenat opterećenja, P - broj pari polova, J - momenat inercije, ω - električna ugaona brzina rotora, ktr - koeficijent viskoznog trenja.
Elektromegnetni moment može se dobiti na osnovu izraza:
( ) [ ] abcrsrr
abcse Pm iLiθ∂∂
= T . (9)
Jednačine (7-9) predstavljaju matamatički model trofazne asinhrone mašine u domenu faznih veličina. Pošto su matrice induktivnosti funkcije

4 Druga vežba
trenutnog položaja rotora, a samim tim i vremena, diferencijalne jednačine su nelinearne sa vremenski promenljivim koeficijentima, pa je model u ovom obliku nepogodan za analizu. Primenom odgovarajućih transformacija moguće je eliminisati vremensku zavisnost koeficijenata matrica induktivnosti tako što se originalni trofazni namoti statora (as, bs, cs) i rotora (ar, br, cr) ekvivalentiraju odgovarajućim fiktivnim namotima koji su međusobno pomereni za 90°, čime se ujedno eleminišu sprege između namota. To se postiže transformacijom rasprezanja i obrtnom transformacijom.
Veza između originalnog, trofaznog i qd0 domena opisana je sledećim jednačinama:
abcsssqd iKi =0 ; abcsssqd uKu =0 ; abcsssqd ψKψ =0 (10)
abcrrrqd iKi =0 ; abcrrrqd uKu =0 ; abcrrrqd ψKψ =0 Matrice transformacija statorskih (Ks ) i rotorskih veličina (Kr ), su:
+−
+−
=
21
21
21
)3
2sin()3
2(sinsin
)3
2(cos)3
2(coscos
32 πθπθθ
πθπθθ
sK ,
+−
+−
=
21
21
21
)3
2sin()3
2sin(sin
)3
2cos()3
2(coscos
32 πβπββ
πβπββ
rK , (11)
∫+=t
g dtt0
)()0( ωθθ ; rθθβ −= ; ∫+=t
rr dtt0
)()0( ωθθ , (12)
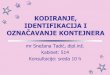
gde je: ωg - brzina rotacije referentnog sistema. Ilustracija transformacije originalnih faznih namota na ekvivalentne
namote u qd0 referentnom sistemu data je na slici 1 na kojoj se vidi međusobni odnos uglova definisanih u jednačinama (6), (11) i (12).

Slika 1. Transformacija namota asinhrone mašine na obrtni sistem
zajedničkih osa
Nakon pomenutih transformacija (detaljan postupak se može naći u [1]), jednačine asinhrone mašine u opštem, qd0 referentnom sistemu, nezavisno od brzine referentnog sistema, su:
qsdsgqssqs tiru ψψω
dd
++⋅= , (13)
dsqsgdssds tiru ψψω
dd
+−⋅= , (14)
ssss tiru 000 d
d ψ+⋅= , (15)
( ) qrdrgqrrqr tiru ψψωω
dd
+−+⋅= , (16)
( ) drqrgdrrdr tiru ψψωω
dd
+−−⋅= , (17)
rrrr tiru 000 d
d ψ+⋅= , (18)
( )qrqsqslsqs iiMiLψ ++⋅= , (19) ( )drdsdslsds iiMiL ++⋅=ψ , (20)

6 Druga vežba
ψ 0 0s ls sL i= ⋅ , (21) ( )qrqsqrlrqr iiMiL ++⋅=ψ , (22) ( )drdsdrlrdr iiMiL ++⋅=ψ , (23) rlrr iL 00 ⋅=ψ , (24) gde je M induktivnost magnećenja. Jednačina mehaničke ravnoteže ostaje nepromenjena:
−−= ωω
Pk
mmJP
dtd tr
me , (25)
dok se elektromagnetni momenat može izraziti kao:
)(23
dsqsqsdse iiPm ψψ −= . (26)
Kod asinhrone mašine postoji mogućnost pogodnog izbora brzine referentnog sistema osa (ωg). Najčešće korišćene varijante su: - ωg=ωs=2⋅π⋅fs, gde je fs frekvencija napona napajanja statora, što odgovara sinhronom referentnom sistemu, - ωg=ω, za referentni sistem koji je vezan za rotor, - ωg=0, za stacionarni referentni sistem.
Treba napomenuti da date jednačine, kojima se opisuje asinhrona mašina u qd0 domenu, ne zavise od izbora referentnog sistema, osim što će ωg imati odgovarajuću vrednost. Matematički model asinhrone mašine predstavlja jedan od načina opisivanja pojava u mašini. Drugi način predstavljanja pojava u električnim mašinama su ekvivalentne šeme. Ekvivalentna šema asinhrone mašine za proizvoljni referentni sistem prikazana je na slici 2.
2.2. MATLAB model asinhrone mašine
Na osnovu jednačina (13-26) moguće je na različite načine u MATLAB-
u formirati simulacioni model asinhronog motora (S-funkcija, model u prostoru stanja, Simulink model, ekvivalentna šema).

Slika 2. Ekvivalentna šema asinhrone mašine u qd0 referentnom sistemu
U MATLAB-u već postoji formirana grupa blokova specijalno
namenjenih za oblast elektroenergetike pod nazivom SymPowerSystems. Prednost korišćenja blokova iz ove biblioteke je mogućnost upotrebe vremenske diskretizacije modela algoritmom bilinearne (Tustin-ove) aproksimacije. Na taj način značajno se skraćuje vreme simulacije. Osim toga, povezivanje blokova iz biblioteke SymPowerSystems sa drugim blokovima iz Simulink okruženja (pa i korisnikovim) moguće je samo preko specijalnih mernih portova ili mernih elemenata (Current i Volgate Measurement). Prema tome, kao najefektnije rešenje nameće se korišćenje gotovog modela asinhrone mašine iz biblioteke SymPowerSystems.
U biblioteci SymPowerSystems nalaze se dva bloka asinhrone mašine: Asynchronous Machine SI Units i Asynchronous Machine pu Units (slika 3). Ova dva bloka predstavljaju isti model asinhrone mašine, a jedina razlika je u načinu unošenja parametara, u apsolutnim ili relativnim jedinicama. Detaljniji opis načina kako su formirani ovi modeli prevazilazi obim ovog Praktikuma. Treba još napomenuti da se ovi modeli mogu koristiti za simulaciju motornog i generatorskog režima rada zadavanjem pozitivnog, odnosno negativnog momenta opterećenja, respektivno.

8 Druga vežba
m
ir_abcir_qd
phir_qdv r_qd
is_abcis_qd
phis_qdv s_qd
wmTe
thetam
MachinesMeasurement
Demux
A
B
C
Tm
a
b
c
m
Asynchronous Machinepu Units
A
B
C
Tm
a
b
c
m
Asynchronous MachineSI Units
a) b) c)
Slika 3. a) Blok asinhrone mašine (Asynchronous Machine pu Units) b) Blok asinhrone mašine (Asynchronous Machine SI Units) c) Blok za merenje karakterističnih veličina
U bloku Asynchronous Machine SI Units (slika 4) najpre se bira tip rotora mašine (namotani ili kavezni rotor). U drugoj liniji može se izabrati brzina referentnog sistema (ref. sistem vezan za rotor, stacionarni, sinhroni referentni sistem). Na sledećoj liniji unose se: nominalna prividna snaga Pn (VA), linijski napon Vn (V) i frekvencija fn (Hz). U narednim linijama unosi se: otpornost statora Rs (Ω ) i induktivnost rasipanja statora Lls (H); svedena otpornost rotora R’r(Ω ) i induktivnost rasipanja rotora L’lr (H); međusobna induktivnost Lm[H], momenat inercija J (kgm2), koeficijent trenja F (Nms) i broj pari polova p. Na kraju se unose početne vrednosti za klizanje, električni ugao (u stepenima) i statorske struje (apsolutna vrednost u A, fazni ugao u stepenima).
U blok Asynchronous Machine pu Units (identičan izgled bloka kao na slici 4) se unose parametri u relativnim jedinicama. Prvo se unose nominalna prividna snaga Pn (VA), linijski napon Vn (V) i frekvencija fn (Hz). Zatim se unose električni i mehanički parametri u relativnim jedinicama, osim konstante inercije H (konstanta inercije) koja se izražava u sekundama (s). Početni uslovi se unose na isti način kao u prethodnom slučaju, osim što je struja u relativnim jedinicama.
Blok asinhrone mašine može se priključiti na napajanje preko tri kraja statora označena sa A, B i C. Rotorski priključci (označeni sa a, b i c) mogu biti kratkospojeni ili povezani na spoljne elemente (npr. dodati otpori u kolu rotora ili napajanje sa strane rotora). Namotaji statora i rotora

interno su spregnuti u zvezdu. Stator se može napajati preko trofaznog izvora spregnutog u zvezdu (slika 5) ili preko izvora spregnutog u trougao (slika 6). U prvom slučaju se koriste tri izvora povezana u zvezdu, a u drugom dva izvora povezana redno. Veza sa Simulink-om moguća je preko ulaza Tm za zadavanje momenta opterećenja. Kao što je već rečeno, ovaj ulaz mora biti pozitivan u motornom režimu i negativan u generatorskom režimu rada. Simulink izlaz bloka asinhronog motora (m) daje vektor koji sadrži 20 merenih veličina u zavisnosti od tipa bloka asinhrone mašine. Ove promenljive mogu biti demultipreksirane korišćenjem specijalnog bloka Asynchronous Machine Demux (slika 3c) koji se nalazi u grupi blokova pod nazivim Machine. Na izlaze ovog bloka se mogu povezati osciloskopi u cilju posmatranja željene veličine.
Slika 4. Maska za unošenje parametara mašine

10 Druga vežba
Slika 5. Napajanje statora preko trofaznog izvora spregnutog u zvezdu
Slika 6. Napajanje statora preko trofaznog izvora spregnutog u trougao
2.3. Opis asinhronog pogona sa frekvencijskim pretvaračem
Asinhroni motor zahteva trofazni izvor promenljive frekvencije za rad sa promenljivom brzinom. Ovaj izvor može biti realizovan korišćenjem frekvencijskog pretvarača koji se sastoji od ispravljača, jednosmernog međukola i invertora. Na slici 7 prikazana je principijelna blok šema tipičnog asinhronog pogona promenljive frekvencije.
Slika 7. Asinhroni pogon promenljive frekvencije

Napon mreže se konvertuje u jednosmerni napon pomoću ispravljača. Filter u jednosmernom (DC) međukolu služi za “peglanje” jednosmernog napona koji se dovodi na ulaz invertora. Invertor se sastoji od šest prekidača snage koji mogu biti Mosfet ili IGBT tranzistori, zavisno od snage pogona. Invertor pretvara napon jednosmernog kola u odgovarajući trofazni naizmenični napon podesive efektivne vrednosti i frekvencije. Postoje različiti algoritmi upravljanja naponom i frekvencijom. Jedna od najčešće korišćenih metoda je sinusna širinsko impulsna modulacija (SPWM modulacija) u kojoj se talasni oblici trofaznog promenljivog napona dobijaju na osnovu poređenja trougaonog nosioca i sinusnog modulacionog signala.
2.4. MATLAB model asinhronog pogona sa frekvencijskim
pretvaračem
Korišćenjem komponenti iz Power System Blockset-a formiran je model asinhronog pogona sa frekvencijskim pretvaračem (fajl Lab2FP.mdl). Izgled simulacionog modela prikazan je na slici 9.
Slika 9. Asinhroni pogon sa frekvencijskim pretvaračem

12 Druga vežba
Prikazani model sadrži više podblokova: trofazni izvor, frekvencijski pretvarač, asinhroni motor, blokove za merenje snage, kao i blokove (Scope) za grafičku predstavu posmatranih veličina. Unutrašnji izgled podbloka PWM frekvencijski pretvarač prikazan je na slici 10. Ovaj podblok je takođe hijerarhijski organizovan te sadrži sledeće podblokove: diodni ispravljač, jednosmerno međukolo, invertor, kolo za upravljanje invertorom, i kolo za kočenje. Lista parametara koji se mogu podešavati dobijaju se dvostrukim klikom na željeni blok. Detaljan izgled ovih blokova može se dobiti opcijom Look under mask iz Edit menija i u daljem tekstu se neće razmatrati.
Slika 10. Blok šema frekvencijskog pretvarača
2.5. Podaci za simulacioni model Asinhroni motor korišćen u ovoj laboratorijskoj vežbi je trofazni, dvopolni, nominalnih podataka: W2200=nP , Un= 380Vx3 , fn=50Hz,
A44.5=nI , 86.0cos =ϕ , 1/min2810=nn i eksperimentalno određenih parametara: Rs= 3.2583 Ω , L1s =8.1733 mH , Ω= 2.6240'
rR , 7.2133' =lrL mH,

Lm=0.1737 H, 2kgm0184.0=J , 004075.0=trk Nm/(rad/s)
Frekvencija rada pretvarača je 1kHz, a parametri jednosmernog međukola: Lf=1 mH i C=340 µF. 3. ZADATAK
1. Koristeći model asinhronog motora iz biblioteke SymPowerSystems formirati simulacioni model asinhronog motora kada se napaja iz mreže. Proučiti ponašanje asinhronog motora pri polasku i opterećivanju za nominalni, a zatim za sniženi napon napajanja. Nakon toga treba realizovati i analizirati generatorski režim rada.
2. Koristeći gotov simulacioni model asinhronog pogona koji se napaja iz frekvencijskog pretvarača posmatrati karakteristične veličine i pojave pri smanjenju i povećanju frekvencije. Analizirati rad pogona sa otpornikom za kočenje u jednosmernom kolu pretvarača frekvencije.
4. POSTUPAK
Startovati MATLAB/Simulink. U Simulink-u otvoriti novi model. Iz odgovarajućih menija sastaviti model asinhronog motora koji se napaja iz mreže. Trofazni izvor se može izabrati iz SymPowerSystems i biblioteke Extra Library/Three-Phase Library u okviru koje postoji model trofaznog izvora (Inductive Source with neutral). Naravno, parametri koje treba podesiti dobijaju se dvostrukim klikom na ikonu. Kao druga varijanta formiranja modela trofaznog izvora jeste da se iz biblioteke Electrical Sources izabere AC Voltage Source i na odgovarajući način formira trofazni izvor. Nakon toga iz biblioteke Machines treba izabrati model asinhronog motora (Asynchronous Machine SI Units) u koji treba uneti parametre motora. Zatim treba izabrati veličine koje želite da posmatrate (u tački 5 ove vežbe koja se odnosi na izveštaj nalazi se prostor u kome treba nacrtati tražene dijagrame).
Najpre treba podesiti parametare u Simulation Parameters meniju i to:
Simulation time: Start time: 0 Stop time: 2.5 Solver Type: Variable-step ode 15s (stiff/NDF) Max. Step Size: auto Initial Step size: auto Relative Tolerance: 1e-3 Absolute Tolerance: 1e-3 Maximum order: 5

14 Druga vežba
Simulacija se pokreće selektovanjem Start-a iz menija Simulation u Simulink-u.
Kada je simulacija završena, vraćanjem u MATLAB prozor mogu se posmatrati rezultati sa više detalja korišćenjem plot funkcije (npr. plot(ω, t)).
4.1 Start neopterećenog motora . Napon napajanja podesiti na nominalnu vrednost. Motor je u praznom hodu. U modelu posmatrati i formirati datoteke sledećih veličina: elektromagnetnog momenta, brzine, struje statora i rotora po q i d osi. Na osnovu snimljenih podataka nacrtati dijagrame me(t), ω(t), me(ω), iqs(t), iqr(t), ids(t), idr(t). Nakon toga simulaciju ponoviti sa sniženom vrednošću napona napajanja od 0,7Un i nacrtati dijagrame me(t) i me(ω).
4.2 Opterećenje i rasterećenje . Ponoviti simulaciju starta pri nominalnom naponu. Nakon dostizanja stacionarnog stanja zapamtiti sve početne vrednosti (kao u Vežbi 1). Blokom step funkcija iz Simulinka realizovati opterećivanje, a nakon dostizanja stacionarnog stanja, i rasterećivanje motora. Nacrtati tražene dijagrame.
4.3 Ponovo pokrenuti prethodni model i realizovati generatorski režim rada promenom znaka momenta opterećenja. Nacrtati tražene dijagrame.
4.4 Asinhroni pogon napajan iz pretvarača frekvencije. Učitati model Lab2FP.mdl i proučiti organizaciju modela. Na odgovarajućem mestu uneti vrednost zadate, referentne brzine. Moment opterećenja podesiti tako da najpre imamo start motora u praznom hodu. Nakon isteka vremena od 0.5s naglo opteretiti motor (mm = mn), a u t=1s naglo rasteretiti motor (mm=0 Nm). Simulaciju izvesti za dva slučaja i to kada je referentna brzina 50% nominalne brzine i kada je referentna brzina 150% nominalne brzine.
4.5 U drugom delu vežbe, koristeći model Lab2FP.mdl, treba analizirati režim kočenja pomoću otpornika u jednosmernom kolu pretvarača. Podesiti referentnu brzinu na ωn. Nakon dostignutog stacionarnog stanja podesiti moment opterećenja na mm=-mnom. Veličine koje treba posmatrati su: brzina, napon i struja jednosmernog kola, struja kroz otpornik za kočenje.

5. IZVEŠTAJ • Matematički model asinhronog motora u sinhronom referentnom
sistemu.
4.1 Start neopterećenog asinhronog motora
• Dijagram elektromagnentog momenta u zavisnosti od vremena pri startu neopterećenog asinhronog motora
vreme [s]
mom
ent
[Nm
]

16 Druga vežba
• Dijagram brzine u zavisnosti od vremena pri startu neopterećenog
asinhronog motora
vreme [s]
brzi
na [
1/m
in]
• Dijagram elektromagnentog momenta u zavisnosti od brzine pri startu neopterećenog motora
brzina [1/min]
mom
ent
[Nm
]

• Dijagram q komponente struje statora i rotora u sinhronom referentnom sistemu pri startu neopterećenog asinhronog motora
vreme [s]
i qs
[A],
i qr [A
]
• Dijagram d komponente struje statora i rotora u sinhronom referentnom sistemu pri startu neopterećenog asinhronog motora
vreme [s]
i ds
[A],
i dr [A
]

18 Druga vežba
• Dijagram momenta u zavisnosti od vremena pri startu neopterećenog
asinhronog motora za sniženi napon napajanja (U=0,7Unom)
vreme [s]
mom
ent
[Nm
]
• Dijagram elektromagnetnog momenta u zavisnosti od brzine pri startu neopterećenog asinhronog motora za sniženi napon napajanja (U=0,7Unom)
brzina [1/min]
mom
ent
[Nm
]

4.2 Opterećenje i rasterećenje
• Dijagram elektromagnetnog momenta u zavisnosti od vremena pri naglom opterećenju i naglom rasterećenju asinhronog motora
vreme [s]
mom
ent
[Nm
]
• Dijagram elektromagnentog momenta u zavisnosti od brzine pri naglom opterećenju i naglom rasterećenju asinhronog motora
brzina [1/min]
mom
ent
[Nm
]

20 Druga vežba
4.3 Generatorski režim rada
• Dijagram momenta u zavisnosti od vremena u generatorskom režimu rada (Mopt=-Mnom)
vreme [s]
mom
ent
[Nm
]
• Dijagram momenta u zavisnosti od brzine u generatorskom režimu rada (Mopt=-Mnom)
brzina [1/min]
mom
ent
[Nm
]

• Dijagram napona i struje (jedna perioda) u stacionarnom stanju u
generatorskom režimu (Mopt=-Mnom)
vreme [s]
Us [V
]
I s [A]
4.4 Asinhroni pogon napajan iz pretvarača frekevencije
• Dijagram momenta u zavisnosti od vremena za asinhroni motor napajan iz pretvarača frekvencije. Start - opterećenje - rasterećenje, f=25 Hz
vreme [s]
mom
ent
[Nm
]

22 Druga vežba
• Dijagram brzine u zavisnosti od vremena za asinhroni motor napajan iz pretvarača frekvencije. Start - opterećenje - rasterećenje, f=25 Hz
vreme [s]
brzi
na [
1/m
in]
• Napon jednosmernog međukola pretvarača frekvencije. Start - opterećenje - rasterećenje, f=25 Hz
vreme [s]
Udc
[V]

• Struja jednosmernog međukola pretvarača frekvencije. Start - opterećenje - rasterećenje, f=25 Hz
vreme [s]
I dc [A
]
• Jedna perioda napona i struje motora napajanog iz pretvarača frekvencije, u stac. stanju pri nominalnom opterećenju, f=25 Hz
vreme [s]
Us [V
]
I s [A]

24 Druga vežba
• Dijagram momenta u zavisnosti od vremena za asinhroni motor napajan iz pretvarača frekvencije. Start - opterećenje - rasterećenje, f=75 Hz
vreme [s]
mom
ent
[Nm
]
• Dijagram brzine u zavisnosti od vremena za asinhroni motor napajan iz pretvarača frekvencije. Start - opterećenje - rasterećenje, f=75 Hz
vreme [s]
brzi
na [
1/m
in]

4.5 Režim kočenja
• Momenat motora u zavisnosti od vremena u režimu kočenja m=-mnom, f=50Hz
vreme [s]
mom
ent
[Nm
]
• Brzina motora u zavisnosti od vremena u režimu kočenja m=-mnom, f=50Hz
vreme [s]
brzi
na [
1/m
in]

26 Druga vežba
• Napon DC kola u režimu kočenja
vreme [s]
Udc
[V]
• Struja kroz otpornik za kočenje i struja u DC kolu u režimu kočenja
vreme [s]
I dc [A
], I R [
A]