Embed Size (px)
Citation preview
Rabu, 12 Agustus 2009
PRESENTASI TUGAS AKHIR
Politeknik Manufaktur Negeri Bandung
PENDETEKSI POSISI ORIENTASIPADA
ROBOT PEMBERSIH LANTAI
OlehIlham Pratama 206 135 0235
PembimbingHadi Supriyanto, ST.MT
Agustinus Manguntam, MM.MT
SISTEMATIKA MATERI
• Pendahuluan• Perancangan dan pembuatan sistem• Hasil• Kesimpulan
PENDAHULUAN
• Latar Belakang• Rumusan Masalah• Batasan Masalah• Tujuan
LATAR BELAKANG
Kesibukan manusia yang semakin padat telah menyebabkan mereka lelah dan malas untuk membersihkan lingkungan tempat tinggalnya. Salah satunya adalah hal yang cukup sederhana, yaitu membersihkan lantai rumah yang sudah berdebu, baik itu dengan menggunakan sapu ataupun vacuum cleaner.
Padahal debu ataupun kotoran mikroskopis dapat menimbulkan penyakit dan menyebabkan alergi pada manusia. Sehingga untuk membantu mengatasi hal tersebut, diperlukan sebuah alat yang mampu menggantikan peran manusia dalam melakukan pekerjaan rumah tangga khususnya untuk membantu manusia dalam membersihkan lantai rumah dari debu dan kotoran-kotoran mikroskopis secara mandiri atau otomatis
RUMUSAN MASALAH
• Robot ini dapat bekerja secara mandiri atau otomatis, sehingga posisi robot berada harus diketahui dan ditampilkan pada sebuah display.
• Posisi keberadan robot yang harus diketahui adalah posisi orientasi robot dalam koordinat sumbu x dan sumbu y.
• Sensor yang digunakan untuk mendeteksi posisi orientasi robot adalah sensor pendeteksi posisi dengan kompas digital dan rotari encoder.
RUANG LINGKUP
• Penggunaan Sensor posisi untuk menampilkan dan menunjukkan posisi orientasi robot berada dalam koordinat sumbu x dan sumbu y.
• Penggunaan Kompas Digital CMPS03 dan Relatif Rotari Encoder sebagai sensor posisi.
• Bahasa C sebagai bahasa pemrograman yang akan diolah datanya dengan menggunakan Mikrokontroller ATMega 8535.
• Pembuatan hardware (rotary encoder).• Tidak membahas dan menganalisa rangkaian.• Medan yang digunakan berupa game field
dengan ukuran 2x2m
TUJUAN
Tujuan yang ingin dicapai dari proyek tugas akhir ini adalah :
Menampilkan posisi orientasi dari robot dalam sumbu x dan sumbu y.
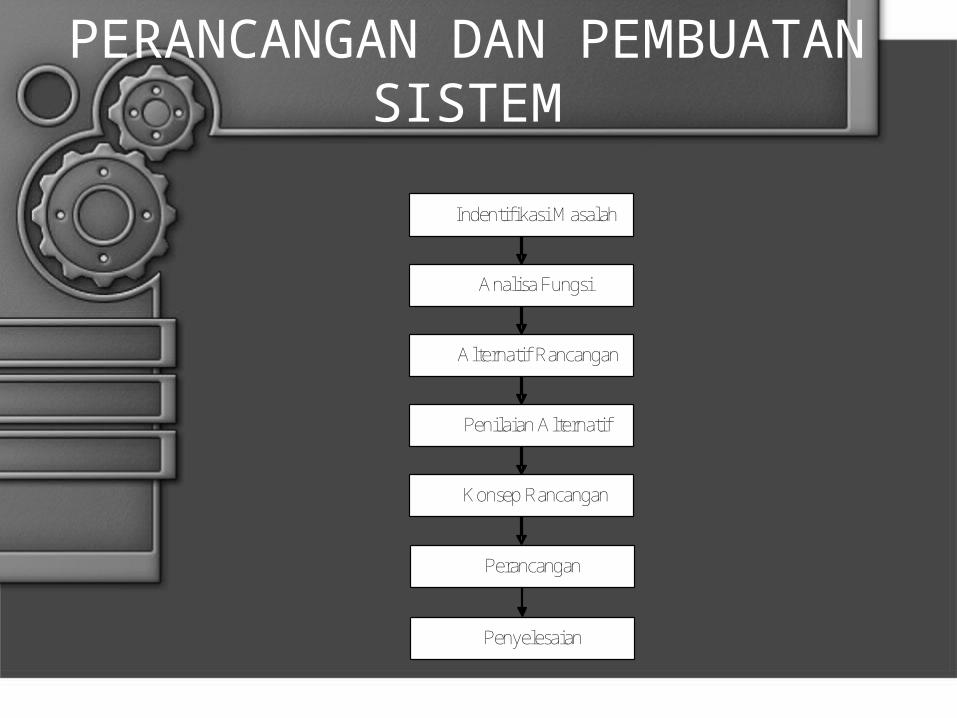
PERANCANGAN DAN PEMBUATAN SISTEM
Perancangan
Penyelesaian
Konsep Rancangan
Penilaian Alternatif
Alternatif Rancangan
Analisa Fungsi
Indentifikasi Masalah
IDENTIFIKASI MASALAH
• Alat yang dapat menggantikan peran manusia dalam melakukan pekerjaan rumah tangga, khususnya untuk membantu manusia dalam membersihkan lantai rumah dari debu dan kotoran-kotoran mikroskopis secara mandiri atau otomatis yaitu berupa sebuah robot. Karena robot ini bekerja secara mandiri atau otomatis, maka kita harus dapat mengetahui posisi dimana robot berada dari tempat semula, sehingga dapat diketahui robot sudah berjalan seberapa jauh.
• Posisi yang harus diketahui dan dideteksi adalah merupakan posisi orientasi dari robot, posisi orientasi ini berupa posisi koordinat dalam sumbu x dan sumbu y.
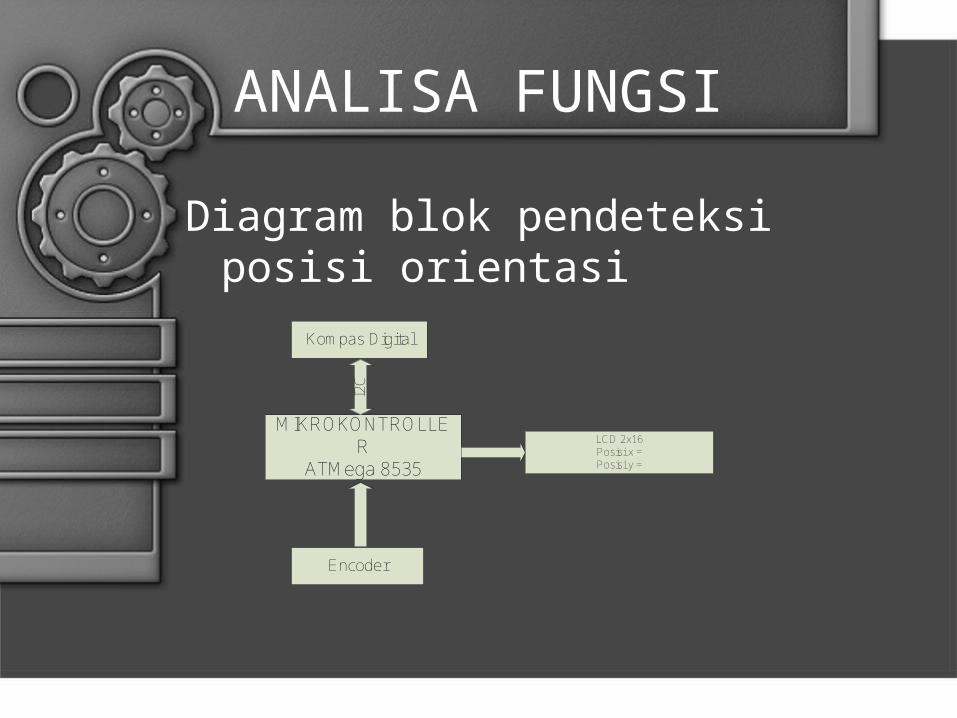
Diagram blok pendeteksi posisi orientasi
ANALISA FUNGSI
MIKROKONTROLLER
ATMega 8535
Kompas Digital
Encoder
LCD 2x16Posisi x = Posisi y =
I2C
ALTERNATIF PERANCANGAN
• Alternatif kompas Digital1. Kompas Digital CMPS032. Kompas Digital HMR3000• Alternatif rotari encoder1. Relative2. Absolut• Alternatif Mikrokontroler1. MCS (AT89C51) 2. AVR Atmega32• Alternatif Bahasa Pemrograman1. C 2. Assembler
KONSEP RANCANGAN• Kompas elektronik yang digunakan kompas elektronik CMPS03
karena mudah didapat selain itu kompas elektronik ini sering digunakan pada robotika.
• Untuk rotary encoder yang digunakan adalah dengan cara membuat sendiri dengan tipe relatif rotary encoder. Tipe ini memiliki kemudahan dalam pembacan bitnya.
• Untuk mikrokontroler digunakan Atmega32 karena mikrokontroler yang digunakan harus mempunyai persyaratan sebagai berikut:- Mempunyai cukup memori untuk menampung program (32K Bytes).- Mudah dihapus dan diprogram ulang.- Mempunyai sejumlah port untuk :
• I2C (Serial) (Port C, pin 0 (SCL) dan pin 1(SDA)).• Timer 16 bit untuk rotary encoder (PB1-T1)• Penggunaan port A, B dan D lainnya bisa digunakan
sesuai dengan syarat • Konsep untuk bahasa pemrograman menggunakan bahasa C
yang mampu diterjemahkan oleh mikrokontroler yang digunakan. Program dengan bahasa C menggunakan software AVR Studio 4 yang di-download mengunakan software Ponyprog
PERANCANGAN
Untuk perancangan dibagi ke dalam 2 bagian yaitu :
1. Perancangan hardware (Rotari Encoder).
2. Perancangan Software (Kompas Elektrik dan Rotari Encoder)
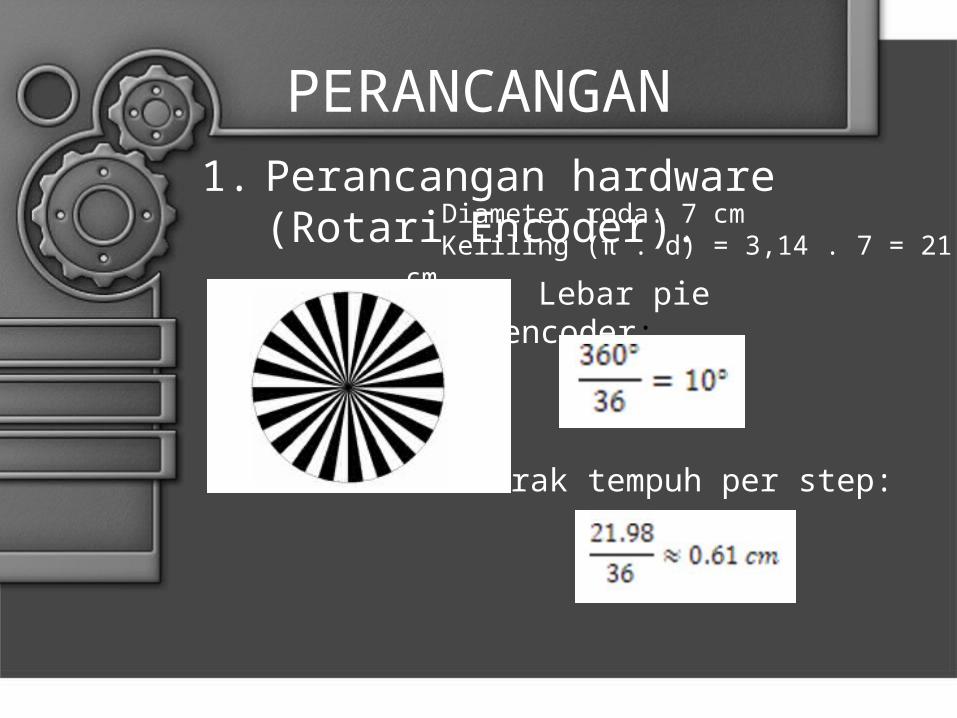
PERANCANGAN1. Perancangan hardware (Rotari
Encoder). Diameter roda: 7 cm Keliling (π . d) = 3,14 . 7 = 21.98
cm Lebar pie
encoder:
Jarak tempuh per step:
PERANCANGAN
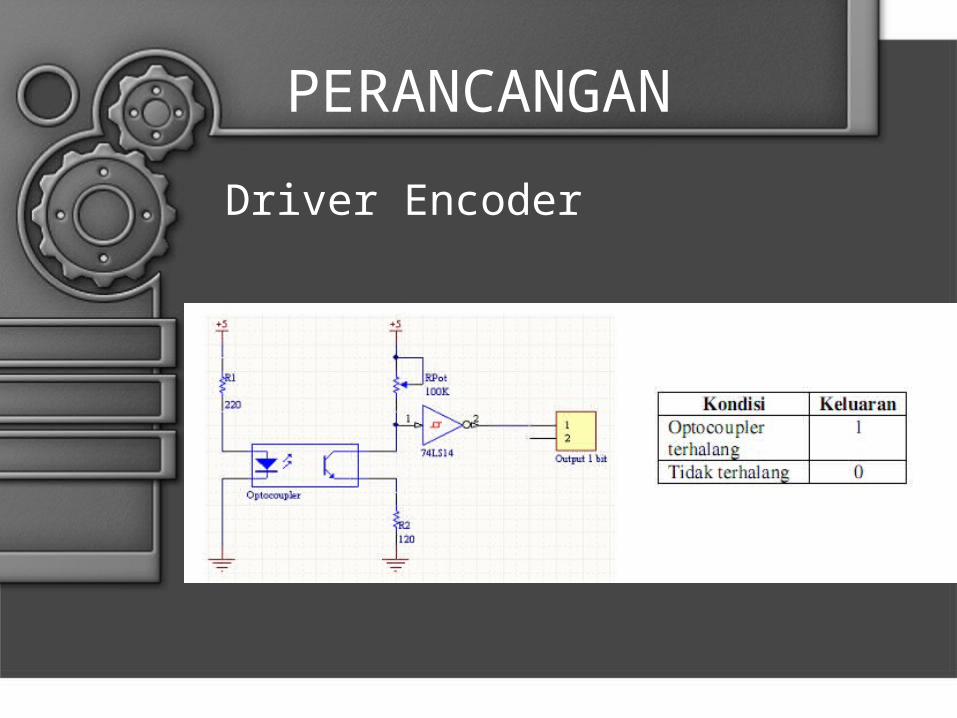
Driver Encoder
PERANCANGAN
2. Perancangan Software (Kompas Elektrik dan Rotari Encoder)
PERANCANGAN
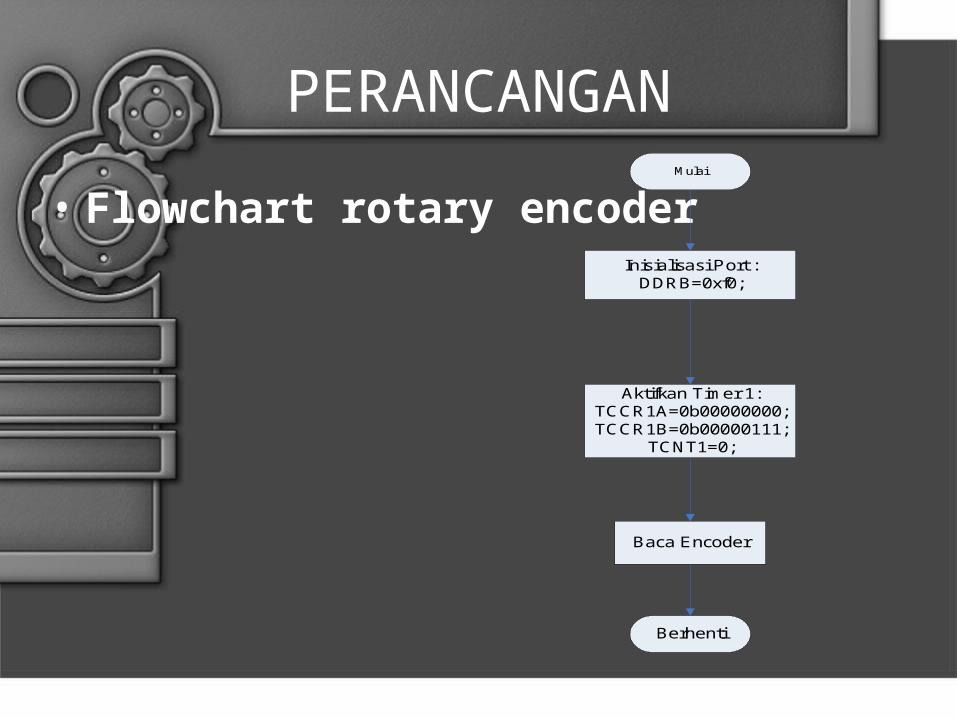
• Flowchart rotary encoderMulai
Inisialisasi Port :DDRB=0xf0;
Baca Encoder
Berhenti
Aktifkan Timer 1:TCCR1A=0b00000000;TCCR1B=0b00000111;
TCNT1=0;
PERANCANGAN
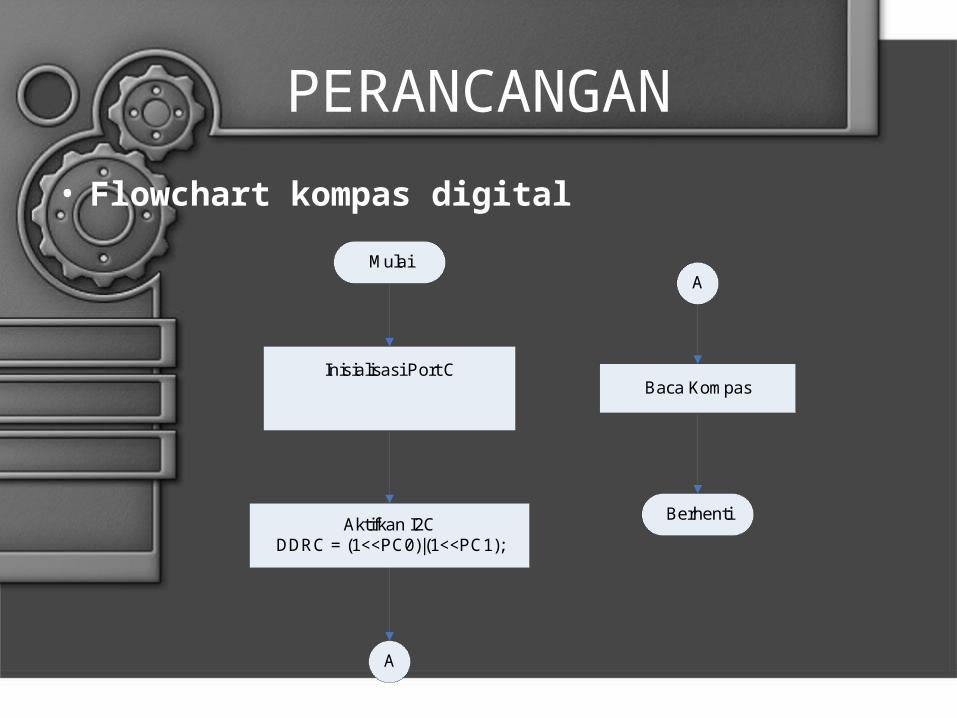
• Flowchart kompas digital
Mulai
Inisialisasi Port C
Aktifkan I2CDDRC = (1<<PC0)|(1<<PC1);
Baca Kompas
Berhenti
A
A
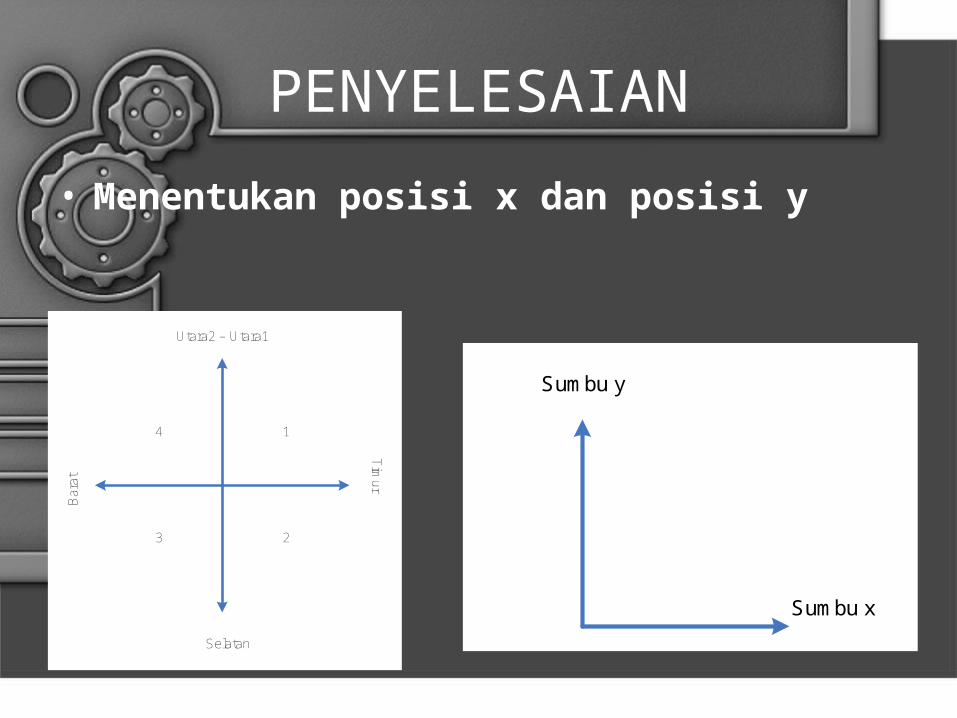
PENYELESAIAN
• Menentukan posisi x dan posisi y
• Flowchart program baca posisi x dan posisi y
PENYELESAIAN
• Menentukan posisi x dan posisi y
Utara2 – Utara1
Bar
at
Selatan
Tim
ur
1
3
4
2
Sumbu y
Sumbu x
PENYELESAIAN
•Flowchart program baca posisi x dan posisi y
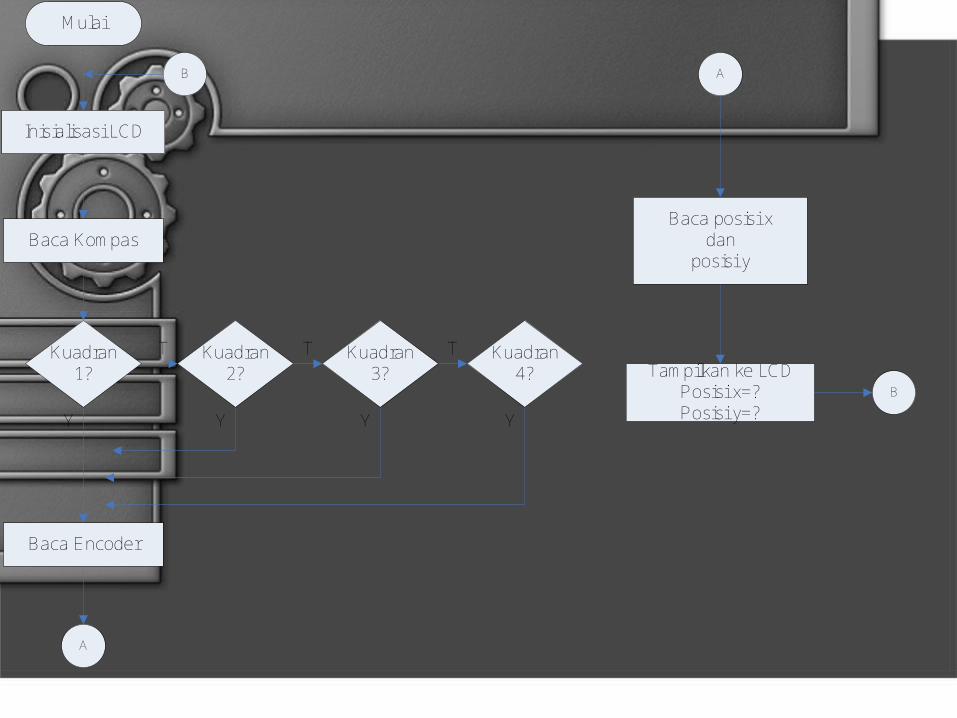
Mulai
Baca Kompas
Inisialisasi LCD
Baca Encoder
Baca posisi x dan
posisi y
Kuadran 1?
Kuadran 2?
Kuadran 3?
Kuadran 4? Tampilkan ke LCD
Posisi x=?Posisi y=?
A
AB
B
TT T
YY Y Y
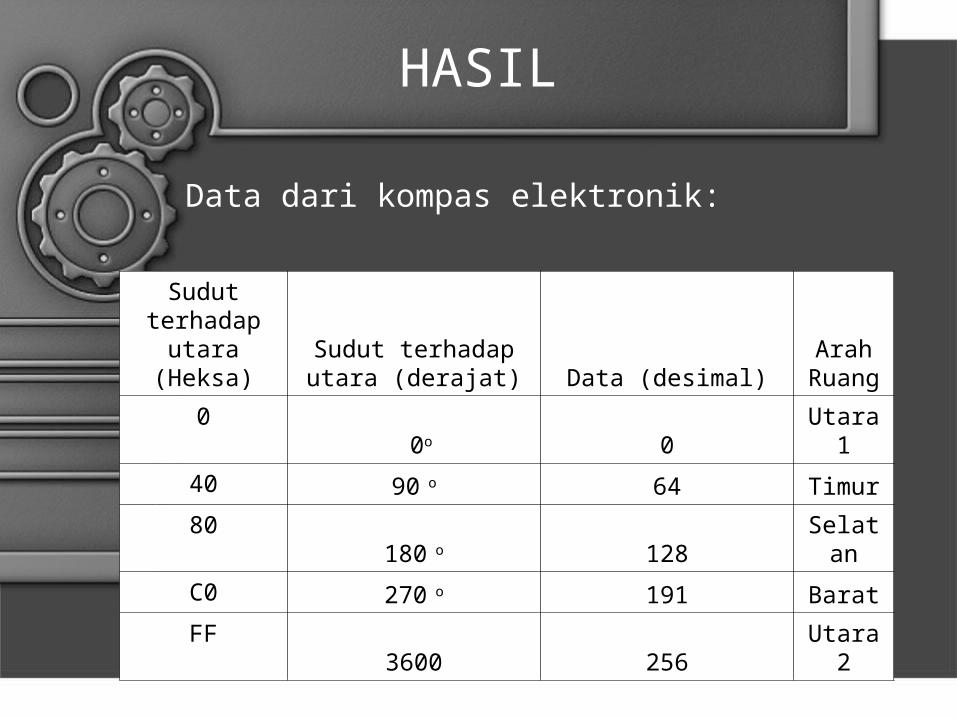
HASIL
Data dari kompas elektronik:
Sudut terhadap
utara (Heksa)
Sudut terhadap utara (derajat) Data (desimal)
Arah Ruang
0 0o 0
Utara1
40 90 o 64 Timur
80180 o 128
Selatan
C0 270 o 191 Barat
FF3600 256
Utara2
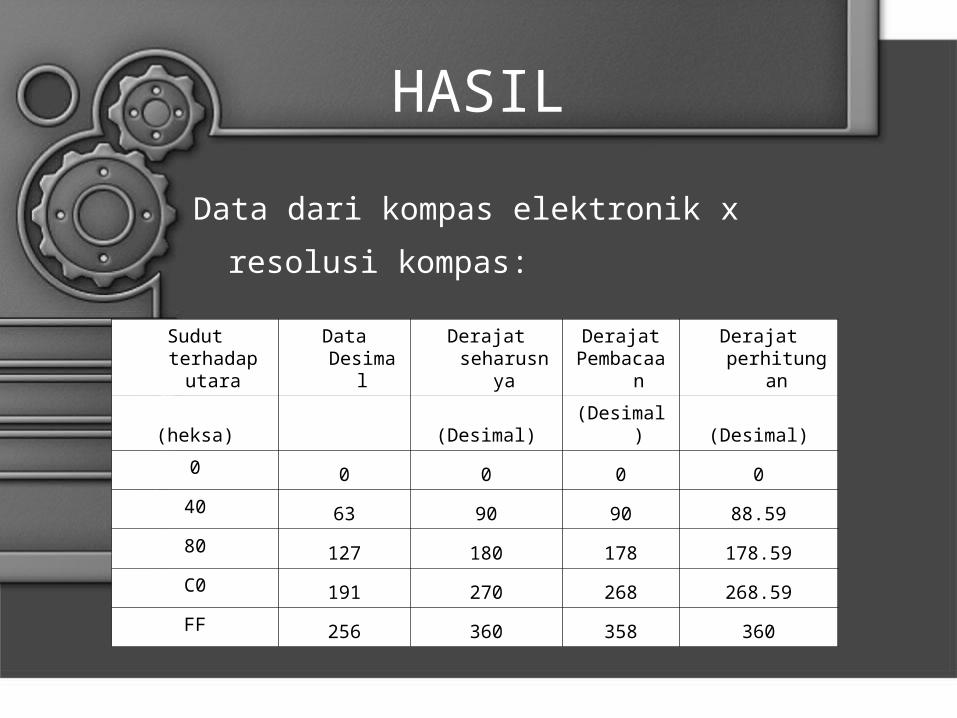
HASIL
Data dari kompas elektronik x resolusi
kompas:
Sudut terhadap utara
Data Desimal
Derajat seharusny
a
DerajatPembacaa
n
Derajat perhitunga
n
(heksa) (Desimal) (Desimal) (Desimal)
0 0 0 0 0
40 63 90 90 88.59
80 127 180 178 178.59
C0 191 270 268 268.59
FF 256 360 358 360
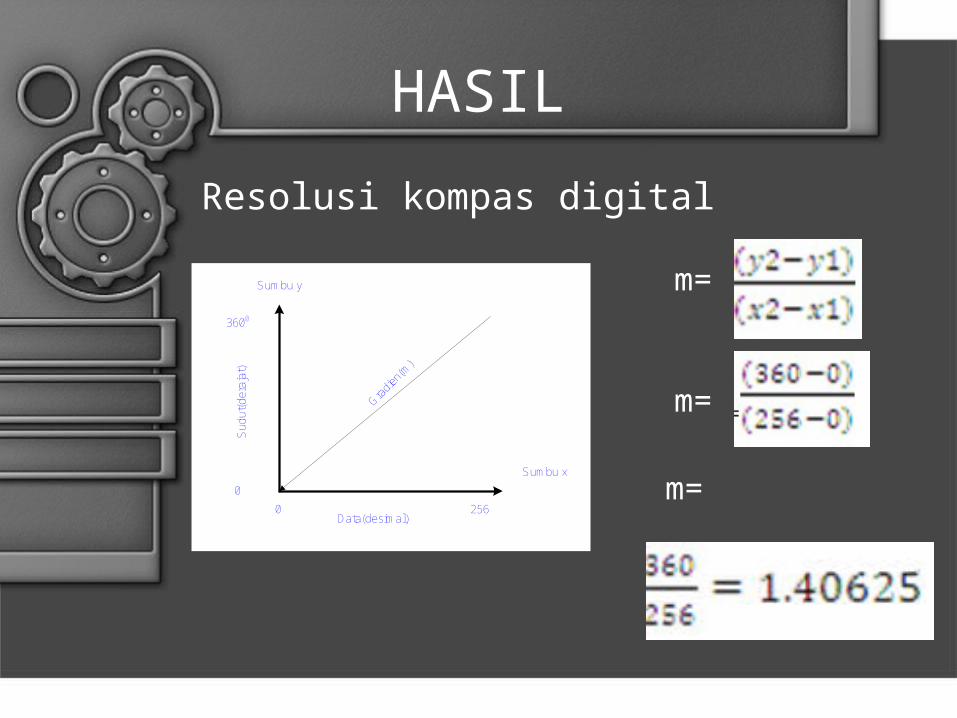
HASIL
Resolusi kompas digital
Sumbu y
0
256
Sumbu x
0
3600
Sud
ut(d
eraj
at)
Data(desimal)
Gradie
n(m
)
m=
m=
m=
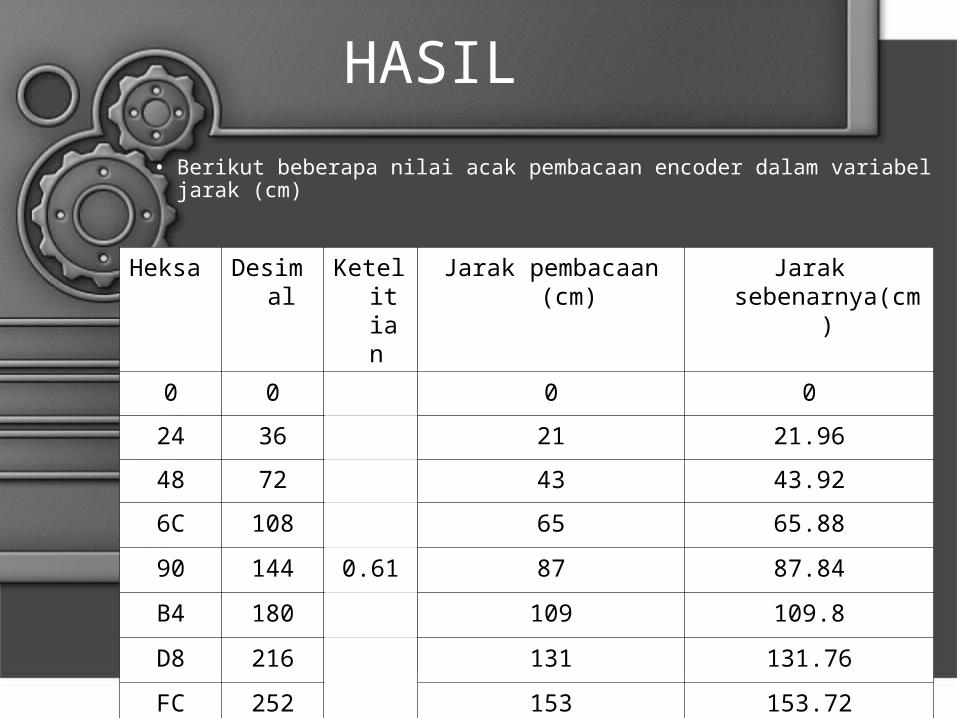
HASIL
• Berikut beberapa nilai acak pembacaan encoder dalam variabel jarak (cm)
Heksa Desimal Ketelitian
Jarak pembacaan (cm) Jarak sebenarnya(cm)
0 0 0 0
24 36 21 21.96
48 72 43 43.92
6C 108 65 65.88
90 144 0.61 87 87.84
B4 180 109 109.8
D8 216 131 131.76
FC 252 153 153.72
HASIL
KESIMPULAN
• Posisi orientasi pada sumbu x dan sumbu y dapat dideteksi dengan mengunakan kompas digital dan rotary encoder.
• Kompas digital digunakan untuk mendeteksi nilai derajat dari pergerakan robot dan sedangkan rotary encoder digunakan untuk mendeteksi jarak yang telah ditempuh robot.
• Cosinus atau sinus dari nilai derajat dikalikan dengan jarak menghasilkan posisi orientasi robot pada sumbu x dan sumbu y.
Terima Kasih …
AEC06





























