Embed Size (px)
DESCRIPTION
Â
Citation preview
PROJECT MANAGEMENT PLANOPERATION: BAXTER
PORTLAND ROBOTICS MOBILITY SPECIALISTS1337 BAXTER DR.
PORTLAND, OREGON 97219
JUNE 6, 2014
HTTP://ISSUU.COM/WESLEYMCDANIEL/DOCS/PROJECT-MANAGEMENT-PLAN_A6349D92B3AD37

INTENTIONALLY LEFT BLANK
TABLE OF CONTENTS
1

1. Cover Page……………………………………………………………………………………………………………………………………………………………………..1
2. Introduction/Project Management Approach/Project Scope/Milestone List/Schedule Baseline and WBS...…..………….3
3. Communications Management Plan/ Cost/Procurement Management Plan................……………………………………………….4
4. Project Scope Management Plan/Schedule Management Plan/Risk Management Plan/Staffing Management Plan/Test Plan/Sponsor Acceptance………………………………………………………………………………………….5
5. CMET Learnings/Team Evaluation/Unfinished Business/Lessons learned/Reflection….…………………………………………….6
6. Photo Journal………………………………………………………………………………………………………………………………………………………………..7
7. Rapid Prototyped Parts…………………………………………………………………………………………………………………………………………………8
8. Team Biography……………………………………………………………………………………………………………………………………………………………9
2
INTRODUCTION
Portland Robotics Mobility Specialists was given the opportunity to make a manufacturing robot mobile by the use of electric hand drills, store bought assembly parts and rapid prototyped sprockets. Baxter will be able to maneuver up slight inclines and through doorways. This is important for demonstration. This project is to gain the attention of staff and students to the engineering program. Baxter will be a unique project that will appeal to all ages.
PROJECT MANAGEMENT APPROACH
The Project Manager, Alex Vollmer, has overall authority of the project. He is responsible for managing the project through each phase and assure completion according the project plan. The team consists of three technical leads as well as a communications specialist.
PROJECT SCOPE
IS IS-NOTTo make the “Maker-Bot” transportable through doorways, up ramps, and in elevators with minimal effort.
To be used for personal transportation.
To make the “Maker-Bot” a visible representation of the skills and tools that we have learned in the CMET program.
To exceed a speed faster than a normal walking pace (3 mph) or to be used for climbing stairways.
To act as an advertising tool to upcoming students as an example of the “real world” adaptations of the “cool stuff” they will learn in the future.
To compromise the existing framework of the original “Maker-Bot”.
To be designed in a way that is 100% safe and easily used by anyone.
To compromise the safety of the consumer.
MILESTONE LIST
SCHEDULE BASELINE AND WORK BREAKDOWN STRUCTURE
Week # Work Packages1 Designate roles2 Basic project ideas3 Finalized project design4 Calculations req'd for design
5List of materials req'd for project
6Rapid prototyping of base parts
7Assembly of the base and axel
8 Rapid prototyping of
Milestone Description DateComplete calculations Theoretical force calculations for testing 5/9/2014Complete list of materials
Materials required for assembly 5/16/2014
Complete base assembly with axel
Completed base assembly with working axel and sprockets
5/30/2014
Complete powertrain assembly
Completion of the full power train. Includes the electric drills mounted and chain in place
6/6/2014
Test Analysis All functionality tested and all identified errors corrected
6/13/2014
3

sprockets9 Completion of powertrain10 Testing phase
Communications Management PlanCommunicati
on TypeDescriptio
nFrequen
cyForma
tParticipant
s/ Distributio
n
Deliverable
Owner
Weekly Project Team
Meeting
Meeting to review action
register and status
Weekly In Person
Project Team and Sponsor
Updated Action
RegisterProject
Manager
Technical Design Review
Review of any
technical designs or
work associated with the project
As Needed
In Person Project Team
Technical Design
PackageProject
Manager
Project team directory for all communications is:
COST/PROCUREMENT Management Plan
Materials Where acquired Purchased By Cost2" and 3" aluminum stock PCC N/A $0
2 Cordless Drills Harbor Freight Sponsor $100
2 Chains McGuire Bearing Wes McDaniel $24 U-Bolts, cordless drill anchor, and strapping Home Depot Todd Moore $15
PEX Pipe (for axles) Home Depot Mike Mason $3
All thread rods PCC N/A $0 Misc. nuts, bolts, and washers Home Depot Mike Mason $30 Bicycle brake assembly N/A Mason Reyes $0
Gasketing PCC Sponsor $5
Name Title E mailGregg Meyer Project Sponsor [email protected] Vollmer Project Manager [email protected]
duMike Mason Technical Lead [email protected]
uMason Reyes Technical Lead [email protected]
mTodd Moore Technical Lead [email protected] McDaniel Communication
Specialist [email protected]
4

Total $177
PROJECT SCOPE MANAGEMENT PLAN
The Project Manager has the responsibility for scope management. The scope is defined by the scope statement and Work Schedule. Each week, the PM assesses the work of the team and defines the goals for the following week. The final project shall be accepted by the Sponsor if the project meets standards.
SCHEDULE MANAGEMENT PLANThe Project Schedule will be created by the Project Manager. The PM will assure tasks are being completed on time. PM also contacts the Sponsor in case materials are required due to a necessary rebuild.
RISK MANAGEMENT PLAN
The Project Team gathered together in the beginning of the project to analyze the possible risks of the plan. Risks include tipping, inadequate power delivery, stability while moving, and safety during maneuverability. Triggers for failure might include a headline in the local newspaper or a story on a local news station. Phone calls from insurance companies as well. The team analyzed the stability of the robot from the manufacturer. No alterations to the base were made. All additions were made inside the confines of the base specifications.
STAFFING MANAGEMENT PLAN
Project Manager – Oversees the project and is responsible for managing the project to provide deliverables.Technical Lead – Responsible for calculations and building the project. Testing is done by technical leads.Communications specialist – Responsible for documentation of the project and presenting the project to the stake holders.
TEST PLAN
ITEM ACCEPTABLE LEVEL
DrivabilityRobot is able to move by the electric hands drills
Stability Robot is stable and does not tip
SPONSOR ACCEPTANCE
Approved by the Project Sponsor:
5

___________________________________________________ Date:________________________Gregg MeyerProject Management Instructor
6
CMET Learnings:
We used statics to determine forces required to get the robot to move as well as forces needed to move the robot up the inclines on campus. . Dynamics and Fluid Mechanics helped us determine the center of gravity for the robot as well as determining the coefficient of friction of the tire on the carpet and gauging stability. This was important in determining the correct forces in action so we plan our design around those forces. Once we were positive on the numbers, we acquired electric hand drills that could supply enough torque to move the robot. Machine Design allowed us to measure the torque produced by the hand drills in the machine shop as well as determining the correct gear ratio for the drills provided. Project Management kept our project on track. Without it, we would not have finished this project on time. Strength of Materials allowed us to determine the materials used for the project such as aluminum versus steel or thermoplastic. Structural Steel design and Machine Design helped us determine deflection in the members that have forces on them. MET Applied CAD allowed us to pull manufactured gears from the internet and change the files into a format that is used for 3D printing. Manufacturing processes gave us the opportunity to use new equipment to rapid prototype our designed parts. Materials Technology gave us insight for our 3d printed parts and how they would break.
Unfinished Business:
We would like to replace the electric drills. Electric motors on each wheel would provide an easier way to move the robot. Electric motors can be synced with a remote control. We would also like to paint the “flares” that hold the all-thread in place so it would be more visually appealing.
Team Member Evaluation:
Each member provided exceptional effort in the project. Alex helped the tech leads and managed the project so we could finish it on time. Mike, Mason, Todd, and Wes all contributed hours of work to finish the project. The team came together to make a great project happen.
Lessons Learned:
Definitely an ongoing process. Even in the testing phase, we are discovering small problems. Experience will tell us what to improve on in future projects.
Reflection:
The CMET program has taught us all a lot of useful and applicable information. This project has shown that to us. For future students, we would like to see the program separated so the CET’s and MET’s can specialize in their field more. For those of us that are MET’s, we feel that having the MET applied CAD class would be very beneficial early in the program. Manufacturing Processes, Machine Design, and Project Management would also be great to have within the first year because a big project can be planned for the graduates. Having a cornerstone project would be great for a resume! From our first class with Gregg, we learned how to apply the knowledge from the text books in real world applications. From finding focal points in mirrors to determining maximum weights for buoyancy to torsion arms, he has driven us to be more hands on with our knowledge. That is what being a mechanical engineer is all about. Building stuff and having fun!
7

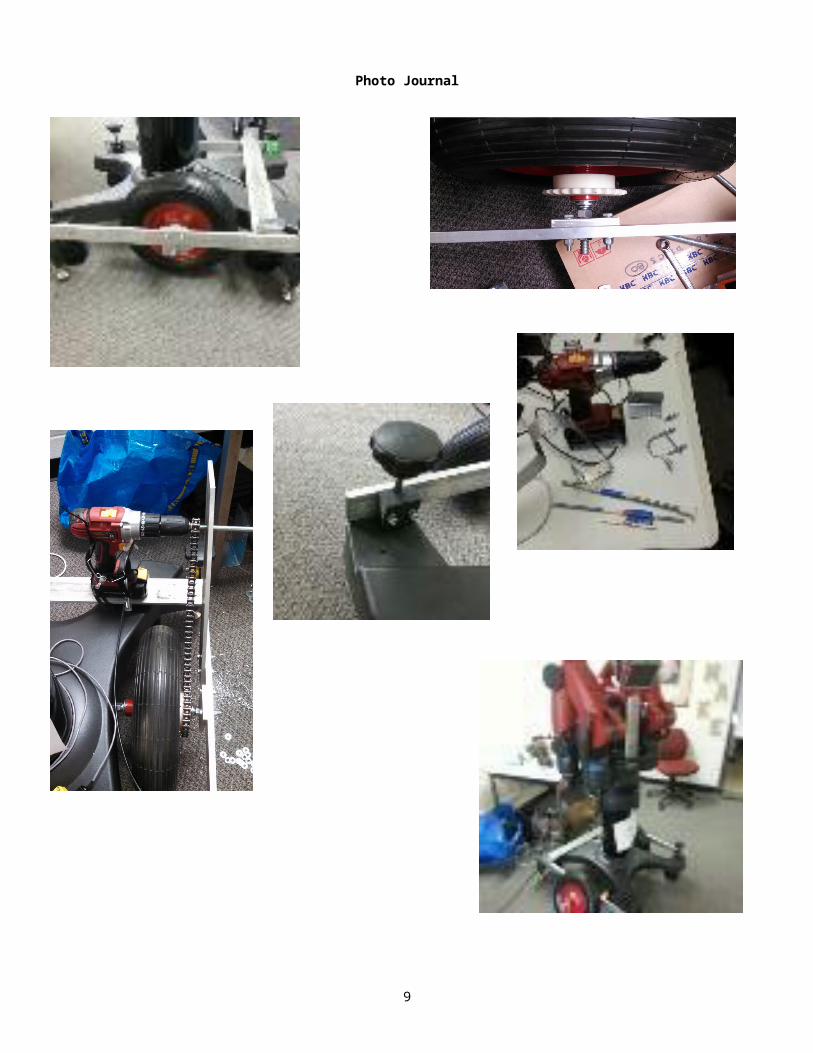
Photo Journal
8

Designed Rapid Prototyped Parts
9
Team Biography
Alex VollmerI got into the CMET program after hearing about it during a fortuitous campus visit with my
roommate. I’ve always been interested in taking things apart and (eventually) putting them back together to see how they work. After looking at the courses and subjects studied, the Mechanical Engineering Technology program seemed like a perfect fit. I’ve always loved math when it involves physical parts and concepts, so it’s been a very fun if challenging and rigorous program! After 2 years and a dozen or so math and physics based courses, I’m ready to graduate and get to work on anything with moving parts! Right now I’m excited to be employed at Volta Volare and working on making electric luxury private aircraft right here in Portland, Oregon. I plan to come back to PCC later for the aviation programs and possibly even get my license to fly what I build!
Mason ReyesI started the MET program because being a mechanical engineer has been an idea in my head for
a long time. I have been pulling stuff apart to see how it works since I was a child. Ever since I was a kid I wanted to make things and make them better. Cars have been a big part of that too. The day I got my first car was the first day it came apart to see how it worked. I came to PCC to gain the knowledge to achieve the goal of designing and making cars and car parts. My goal is to take this knowledge I have gained to the performance market of cars!
Mike MasonWhat got me really interested in the mechanical technology program at PCC was when a member
of the faculty in the program (Professor Greg Gerstner) visited a Math 65 class I was taking three years ago. He peaked my interest by pointing out the great opportunities there are in the Portland area in this field. My initial interest was that of architectural design since this is what my profession had been for over 25 years on the construction side of things until the economy took a turn for the worse. I moved near the Portland area, Tualatin, finding employment in the HVAC manufacturing industry. PCC seemed to be a great fit due to the fact that it was so close. I worked full time at Huntair while taking comp classes which worked out just fine until I began the CMET classes 2 years ago. I soon found that doing both was not going to be an option due to this rigorous program. As luck would have it, the weekend shift I was working at the time, was discontinued and I was then able to devote all of my time and energy into this program.
Todd MooreIt all started a few years ago when my wife Kendra convinced me to go back to school and finish
what I started years earlier. The goal at the time was to get enrolled at P.C.C. for some basic classes. After a few terms had passed by, I had decided that I was going to try for bachelors in science with a nursing degree. My math 60 class was taught by an electrical engineer Bill Diss. Mr. Diss had announced that a guest speaker from the engineering department would be stopping by. Once Mr. Meyer (guest speaker) started talking about all these physics and engineering related subjects, it was at that moment that I knew I was going to have to tell my wife about my new academic interest. Next thing you know, I’m trying to do static calculations in Jan Chambers Class. I can’t wait to visit P.C.C in the future and talk with people I know and future engineers.
Wes McDanielWhen I was young, I loved to build with Legos and kinects. My dad always had a project vehicle at
his house to I got to watch and learn. When I bought my first car, I bought upgrades for it and installed them myself so the car scene was already appealing to me. After discharging from the military, I knew I had to do something with my life. I found a link for a professional drift racing event in Washington. After going to the event, I was hooked on becoming a racecar driver. At the races, I asked the crews what I needed to be a racecar mechanic and they told me to get an engineering degree. A friend of mine was going to PCC for quite a few things and he told me about the engineering program. I worked at a 5th wheel RV manufacturing plant in eastern Oregon at the time and I enrolled into the CMET program winter term. I want to learn how to build cars and design my own performance parts. One day, I might even be a racecar driver.
10




















