Embed Size (px)
Citation preview

UNIVERZA V MARIBORU
FAKULTETA ZA ELEKTROTEHNIKO,
RAČUNALNIŠTVO IN INFORMATIKO
EKONOMSKO-POSLOVNA FAKULTETA
Matija Hrupački
PROJEKT HIŠNE AVTOMATIZACIJE PRI
OBNOVI DVORCA KULMER
Magistrsko delo
Maribor, avgust 2017

PROJEKT HIŠNE AVTOMATIZACIJE PRI
OBNOVI DVORCA KULMER
Magistrsko delo
Študent: Matija Hrupački
Študijski program: Študijski program 2. stopnje
Gospodarsko inženirstvo - Elektrotehnika
Smer: Avtomatika in robotika
Mentor FERI: izr. prof. dr. Marjan Golob
Mentor EPF: doc. dr. Igor Vrečko
Lektorica: Ksenija Pečnik, prof. slov. jezika


ZAHVALA
Zahvaljujem se družini, prijateljem in sošolcem za podporo v času študija. Prav tako se
zahvaljujem Regionalni energetski agenciji severozahodne Hrvaške za sodelovanje pri
pripravi magistrskega dela. Zahvaljujem se tudi mentorjema, prof. dr. Marjanu Golobu in
doc. dr. Igorju Vrečku, za koristne nasvete in ves čas, ki sta ga namenila za odgovore na moja
številna vprašanja.
i
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
Ključne besede: projekt, BMS, avtomatizacija objektov, komunikacijski protokoli, KNX,
M-Bus, Modbus, zagonski elaborat
UDK klasifikacija: 005.8:[681.5:728.82](043.2)
POVZETEK
Magistrsko delo predstavlja projekt hišne avtomatizacije pri obnovi dvorca Kulmer.
Pripravljen je zagonski elaborat, v katerem so pojasnjeni cilji projekta avtomatizacije,
aktivnosti, tveganja, projektna organizacija in potrebna dokumentacija za začetek njegovega
izvajanja. Podan je opis komunikacijskih protokolov, ki se uporabljajo pri povezovanju
sistemov ogrevanja, hlajenja, prezračevanja, razsvetljave in tehniške zaščite. Poleg tega so
opisani vgrajeni sistemi in oprema ki se vgrajuje v objekt. Pojasnjeni sta tudi integracija in
vizualizacija naprav v sistemu samodejnega krmiljenja stavbe (BMS).

ii
Building automation project in the reconstruction of the Kulmer castle
Keywords: project, BMS, building automation, communication protocols, KNX, M-Bus,
Modbus, project start-up.
UDK Classification: 005.8:[681.5:728.82](043.2)
ABSTRACT
The Master’s thesis presents the project of building automation in the reconstruction of the
Kulmer castle. Prepared is a project start-up, which presents the goals of the automation
project, activities, risks, the project organization and the necessary documentation for the
beginning of its execution. Provided is a description of communication protocols, which are
being used in the integration of heating systems, cooling systems, ventilation systems, lighting
systems and system for technical protection. In addition, the installed systems and the
equipment, which is being installed into the object, are described. Explained are also the
integration and visualisation of devices in the building management system.

iii
KAZALO
1 UVOD ................................................................................................................................. 1
1.1 Namen, cilji in osnovne trditve magistrskega dela ...................................................... 2
1.2 Predpostavke in omejitve magistrskega dela ............................................................... 3
1.3 Predvidene metode magistrskega dela ......................................................................... 3
2 PROTOKOLI IN ODPRTI STANDARDI V HIŠNOJ AVTOMATIZACIJI ............ 4
2.1 Protokol ....................................................................................................................... 4
2.2 Referenčni model ISO/OSI .......................................................................................... 4
2.3 Topologija .................................................................................................................... 6
2.4 Modbus protokol.......................................................................................................... 8
2.5 Protokol M-Bus ......................................................................................................... 13
2.6 Protokol TCP/IP ........................................................................................................ 17
3 KONNEX (KNX) ELEKTRIČNE INŠTALACIJE ..................................................... 18
3.1 Prednosti standarda KNX .......................................................................................... 18
3.2 Mednarodni standard ................................................................................................. 19
3.3 Področja uporabe ....................................................................................................... 20
3.4 Komunikacijski mediji za prenos podatkov .............................................................. 20
3.5 KNX v modelu ISO/OSI............................................................................................ 22
3.6 Senzorji in aktuatorji ................................................................................................. 22
3.7 Topologija KNX TP-1 ............................................................................................... 23
3.8 Tipi kablov vodila in povezovanje ............................................................................ 25
3.9 Tehnologija prenosa podatkov ................................................................................... 26
3.10 Fizični in skupinski naslovi ................................................................................... 27
3.11 Način programiranja .............................................................................................. 29
3.12 ETS − Engineering Tool Software ......................................................................... 29
iv
3.13 Vzorčni primer načina dela in krmiljenja razsvetljave .......................................... 30
3.14 Sheme inštalacije ................................................................................................... 32
4 SISTEM SAMODEJNEGA KRMILJENJA STAVBE (BMS)................................... 33
4.1 Vgrajena oprema in sistem BMS v dvorcu Kulmer .................................................. 34
4.2 Sistem ogrevanja........................................................................................................ 37
4.3 Prezračevalni sistem .................................................................................................. 44
4.4 Sistem hlajenja ........................................................................................................... 51
4.5 Upravljanje temperatur v prostorih ............................................................................ 53
4.6 Razsvetljava ............................................................................................................... 55
4.7 Meritve energije in vode ............................................................................................ 57
4.8 Tehnična zaščita ........................................................................................................ 62
4.9 Vremenska postaja ..................................................................................................... 64
4.10 Scenariji, spremljanje trendov in alarmna sporočila .............................................. 65
5 ZAGONSKI ELABORAT PROJEKTA ....................................................................... 67
5.1 Projekt kot proces ...................................................................................................... 67
5.2 Povzetek projekta obnove dvorca Kulmer ................................................................. 68
5.3 Cilji projekta .............................................................................................................. 70
5.4 Projektne aktivnosti ................................................................................................... 73
5.5 Terminski plan ........................................................................................................... 76
5.6 Projektno vodenje ...................................................................................................... 79
5.7 Projektna organizacija ............................................................................................... 80
5.8 Obvladovanje tveganj projekta .................................................................................. 81
5.9 Ekonomika projekta ................................................................................................... 86
6 SKLEP ............................................................................................................................. 90
7 VIRI IN LITERATURA ................................................................................................. 92
v
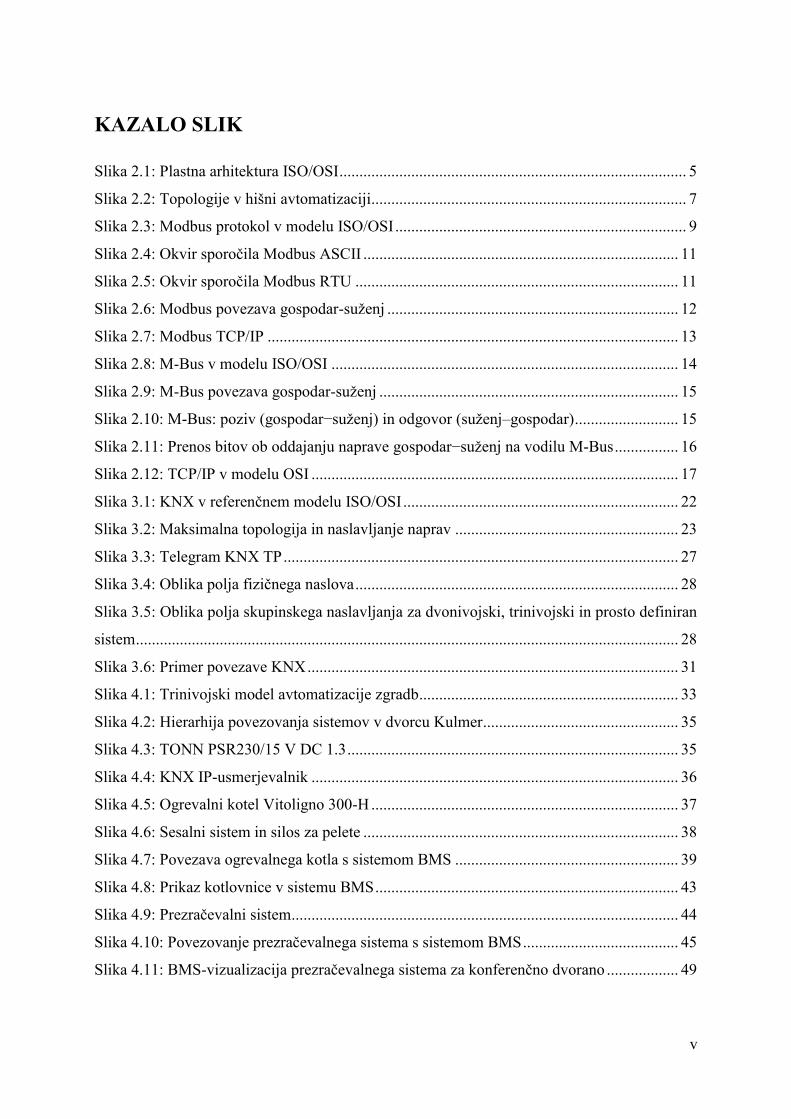
KAZALO SLIK
Slika 2.1: Plastna arhitektura ISO/OSI ....................................................................................... 5
Slika 2.2: Topologije v hišni avtomatizaciji ............................................................................... 7
Slika 2.3: Modbus protokol v modelu ISO/OSI ......................................................................... 9
Slika 2.4: Okvir sporočila Modbus ASCII ............................................................................... 11
Slika 2.5: Okvir sporočila Modbus RTU ................................................................................. 11
Slika 2.6: Modbus povezava gospodar-suženj ......................................................................... 12
Slika 2.7: Modbus TCP/IP ....................................................................................................... 13
Slika 2.8: M-Bus v modelu ISO/OSI ....................................................................................... 14
Slika 2.9: M-Bus povezava gospodar-suženj ........................................................................... 15
Slika 2.10: M-Bus: poziv (gospodar−suženj) in odgovor (suženj–gospodar) .......................... 15
Slika 2.11: Prenos bitov ob oddajanju naprave gospodar−suženj na vodilu M-Bus ................ 16
Slika 2.12: TCP/IP v modelu OSI ............................................................................................ 17
Slika 3.1: KNX v referenčnem modelu ISO/OSI ..................................................................... 22
Slika 3.2: Maksimalna topologija in naslavljanje naprav ........................................................ 23
Slika 3.3: Telegram KNX TP ................................................................................................... 27
Slika 3.4: Oblika polja fizičnega naslova ................................................................................. 28
Slika 3.5: Oblika polja skupinskega naslavljanja za dvonivojski, trinivojski in prosto definiran
sistem ........................................................................................................................................ 28
Slika 3.6: Primer povezave KNX ............................................................................................. 31
Slika 4.1: Trinivojski model avtomatizacije zgradb ................................................................. 33
Slika 4.2: Hierarhija povezovanja sistemov v dvorcu Kulmer ................................................. 35
Slika 4.3: TONN PSR230/15 V DC 1.3 ................................................................................... 35
Slika 4.4: KNX IP-usmerjevalnik ............................................................................................ 36
Slika 4.5: Ogrevalni kotel Vitoligno 300-H ............................................................................. 37
Slika 4.6: Sesalni sistem in silos za pelete ............................................................................... 38
Slika 4.7: Povezava ogrevalnega kotla s sistemom BMS ........................................................ 39
Slika 4.8: Prikaz kotlovnice v sistemu BMS ............................................................................ 43
Slika 4.9: Prezračevalni sistem ................................................................................................. 44
Slika 4.10: Povezovanje prezračevalnega sistema s sistemom BMS ....................................... 45
Slika 4.11: BMS-vizualizacija prezračevalnega sistema za konferenčno dvorano .................. 49

vi
Slika 4.12: BMS-vizualizacija prezračevalnega sistema za kuhinjo in restavracijo ................ 50
Slika 4.13: Zunanja VRV-enota ............................................................................................... 51
Slika 4.14: Mod ogrevanje/hlajenje ......................................................................................... 53
Slika 4.15: Določanje temperature ........................................................................................... 53
Slika 4.16: Upravljanje temperatur po prostorih v sistemu BMS ............................................ 54
Slika 4.17: Magnetni stiki na oknih v sistemu BMS ................................................................ 55
Slika 4.18: Stikalo KNX ........................................................................................................... 56
Slika 4.19: Upravljanje razsvetljave s pomočjo tlorisnega prikaza v sistemu BMS ................ 56
Slika 4.20: Upravljanje razsvetljave v sistemu BMS ............................................................... 57
Slika 4.21: Poraba električne energije v sistemu BMS ............................................................ 59
Slika 4.22: Prikaz porabe v obliki diagrama v sistemu BMS ................................................... 59
Slika 4.23: Merilniki porabe toplotne energije v sistemu BMS ............................................... 60
Slika 4.24: Merilnik vode z modulom M-Bus .......................................................................... 61
Slika 4.25: Merilniki porabe vode v sistemu BMS .................................................................. 61
Slika 4.26: Merilnik plina z modulom M-Bus ......................................................................... 62
Slika 4.27: Merilniki porabe plina v sistemu BMS .................................................................. 62
Slika 4.28: Vizualizacija videonadzora v sistemu BMS .......................................................... 64
Slika 4.29: Prikaz podatkov z vremenske postaje v sistemu BMS .......................................... 64
Slika 4.30: Določanje scenarijev v sistemu BMS .................................................................... 65
Slika 4.31: Temperaturni trend v sistemu BMS ....................................................................... 66
Slika 5.1: Lokacija projekta ..................................................................................................... 69
Slika 5.2: Dvorec Kulmer, stanje pred rekonstrukcijo ............................................................. 69
Slika 5.3: Projektna organizacija .............................................................................................. 80

vii
KAZALO TABEL
Tabela 3.1 Možna področja uporabe sistema KNX ................................................................. 20
Tabela 3.2 Prioritete pri prenosu podatkov .............................................................................. 26
Tabela 3.3 Primer naslavljanja KNX ....................................................................................... 31
Tabela 4.1 Podatkovne Modbus točke za ogrevalni sitem Vitoligno 300-H ........................... 39
Tabela 4.2 Podatkovne Modbus točke prezračevalnega sistema ............................................. 46
Tabela 4.3 Vgrajene kamere ..................................................................................................... 63
Tabela 5.1: Terminski plan prenove dvorca Kulmer ................................................................ 78
Tabela 5.2: Analiza tveganj pri obnovi dvorca Kulmer ........................................................... 83
Tabela 5.3: Finančna donosnost naložbe .................................................................................. 87
Tabela 5.4: Kazalniki ekonomskih vplivov .............................................................................. 89
viii
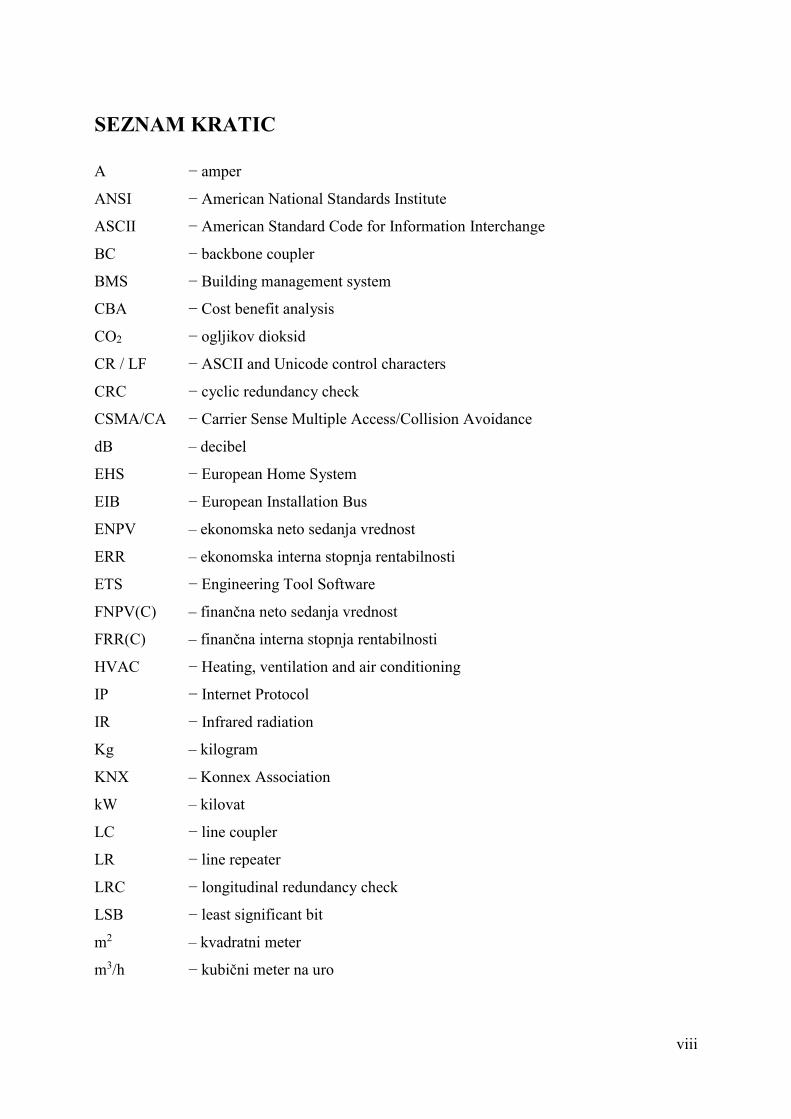
SEZNAM KRATIC
A − amper
ANSI − American National Standards Institute
ASCII − American Standard Code for Information Interchange
BC − backbone coupler
BMS − Building management system
CBA − Cost benefit analysis
CO2 − ogljikov dioksid
CR / LF − ASCII and Unicode control characters
CRC − cyclic redundancy check
CSMA/CA − Carrier Sense Multiple Access/Collision Avoidance
dB – decibel
EHS − European Home System
EIB − European Installation Bus
ENPV – ekonomska neto sedanja vrednost
ERR – ekonomska interna stopnja rentabilnosti
ETS − Engineering Tool Software
FNPV(C) – finančna neto sedanja vrednost
FRR(C) – finančna interna stopnja rentabilnosti
HVAC − Heating, ventilation and air conditioning
IP − Internet Protocol
IR − Infrared radiation
Kg – kilogram
KNX – Konnex Association
kW – kilovat
LC − line coupler
LR − line repeater
LRC − longitudinal redundancy check
LSB − least significant bit
m2 – kvadratni meter
m3/h − kubični meter na uro

ix
mm – milimeter
MSB − most significant bit
NSV – neto sedanja vrednost
REGEA – Regionalna energetska agencija sjeverozapadne Hrvatske
RTU − remote terminal unit
SELV − Safety Extra Low Voltage
S-FSK − spread frequency-shift keying
TCP − Transmission Control Protocol
TONN − Trend Open Network Node
V – volt
VRV − variable refrigerant volume
W – vat
Ω − ohm
€ − evro


Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
1
1 UVOD
Ljudje v različnih tipih zgradb imajo različne potrebe. Da bi tem lahko zadostili, je treba v
zgradbah vzpostaviti različne sisteme (angl. building services), ki ustvarijo prijetno okolje za
bivanje oz. delovanje [1]. Sistemi, kot so ogrevanje, klimatizacija, prezračevanje, osvetlitev,
ter varnostni sistemi se vedno bolj integrirajo. Kontrolni sistem, ki omogoča njihovo
avtomatiko (regulacijo), imenujemo sistem samodejnega krmiljenja stavb (angl. building
management system, v nadaljevanju tudi BMS). Cilj takšnega sistema je narediti stavbo čim
bolj »inteligentno«, tako se je posledično uveljavil strokovni termin »inteligentne stavbe«. Z
izrazom inteligentna stavba označujemo stavbo, ki ima povezane manjše podsisteme, ki
vsebujejo dodatne funkcije za izboljšanje kakovosti bivanja. Večina »inteligence« v zgradbah
je izvedena le programsko z vnaprej določenimi vzorci obnašanja. S povezavo različnih
sistemov stavbe imamo možnosti za večjo optimizacijo delovanja. Sistem tako na primer sam
ugasne luči in izklopi gretje ali klimo, če ugotovi, da je prostor po določenem času prazen.
Prednosti samodejnega krmiljenja stavb so:
• ekonomske prednosti in
• prednosti za uporabnika.
Ekonomske prednosti
Odločitev za avtomatizacijo v poslovnih zgradbah pomeni večji začetni vložek, dolgoročno pa
lahko pričakujemo pozitiven ekonomski učinek. Tipično so obratovalni stroški v življenjski
dobi sedemkrat večji kot stroški izgradnje, zato je smiselno stavbo načrtovati tako, da so
obratovalni stroški optimalni, kar lahko dosežemo s primerno avtomatizacijo. Z zmanjšanjem
porabe energije ugodno vplivamo tudi na zaščito naravnih virov, kar prinese dolgoročne
pozitivne učinke na celotno gospodarstvo [2]. Izboljšano ogrevanje in hlajenje stavb ima
enega od največjih potencialov za energetske prihranke, s tem izboljšano delovno okolje pa
vpliva na višjo storilnost zaposlenih.
Prednosti za uporabnika
Avtomatizacija nam omogoča, da lažje obvladujemo različne sisteme v stavbi tudi na daljavo,
kar uporabnikom daje občutek varnosti in kontrole. V večjih zgradbah nam globalni pogled na
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
2
sisteme omogoča lažje vzdrževanje in hitrejše odpravljanje napak. Poleg tega omogoča lažje
spreminjanje lastnosti sistemov.
1.1 Namen, cilji in osnovne trditve magistrskega dela
Hišna avtomatizacija je zelo zanimivo in koristno tehnološko področje, vendar lahko pri
izvedbi tovrstnih projektov naletimo na številne ekonomske in tehnološke težave. Številni
standardi in komunikacijski protokoli, različne tehnološke izvedbe, nezanesljivost ter cena so
razlogi za omejeno uporabo sistemov hišne avtomatizacije pri novogradnjah in obnovah
objektov. Napredek tehnologije v relativno kratkem časovnem obdobju omogoča dobre
tehnološke in cenovno sprejemljive rešitve; obstaja torej velik potencial, da takšna
avtomatizacija skozi čas postane del življenjskega standarda.
Koncept hišne avtomatizacije temelji na inteligentnem sistemu upravljanja, ki združuje
naprave ter avtomatizacijske in komunikacijske postopke. Da bi bil takšen sistem celovit, mu
je treba dodati določen način povezovanja naprav, kot so na primer: vrsta prenosnega medija,
komunikacijski protokol, topologija omrežja in hierarhija naprav.
Cilj magistrskega dela je bil predstaviti projekt »pametne hiše« na praktičnem primeru dvorca
Kulmer, kjer se načrtuje vzpostavitev Energetskega centra Bračak. Dvorec Kulmer je tako
postal vzorčni primer uporabe najmodernejše tehnologije na področju energetske obnove z
vgrajenim osrednjim nadzornim sistemom krmiljenja, s pomočjo katerega bo mogoče
nadzirati in upravljati z vsemi vgrajenimi sistemi v zgradbi.
Opisali smo način povezovanja in komunikacije ter postopek integracije s pomočjo sistema
samodejnega krmiljenja - BMS, ki bo vgrajen v zgradbi. Nato smo pojasnili vse funkcije
takšnega sistema. Z integracijo sistema se lahko najboljše izkoristijo možnosti opreme,
največja prednost pa je, da s pomočjo takšnega sistema v veliki meri zmanjšamo porabo
energentov in olajšamo vzdrževanje objekta, saj sistem ob kakršnikoli napaki samodejno
zazna okvaro in pošilja alarmno sporočilo na zaslon BMS sistema ali druge naprave,
povezane s sistemom. Poleg tega lahko v vsakem trenutku nadziramo in upravljamo s sistemi
z osrednjega mesta v stavbi ali z oddaljene lokacije.

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
3
Predstavili smo tudi zagonski elaborat projekta Energetskega centra Bračak, ki je temeljit
zapis projekta, na podlagi katerega se projekt lahko začne izvajati. V zagonskem elaboratu so
razloženi načrt projekta, namenski in objektni cilji, projektne aktivnosti, terminski plan
izvajanja, analiza tveganj, ekonomika projekta in projektna organizacija. V sklepu smo podali
revizijo celotnega projekta in njegovih prednosti ter možne prihodnje rešitve za optimizacijo.
1.2 Predpostavke in omejitve magistrskega dela
Sistem centralnega nadzora in upravljanja je samo del celotnega projekta prenove dvorca
Kulmer. V magistrskem delu smo podali tehnično in teoretično znanje s področij upravljanja
projektov in hišne avtomatizacije. Glede na to, da so prenova objekta in vgrajeni sistemi zelo
zapletene celote, smo v magistrskem delu opisali zgolj bistvene dele inteligentnega
upravljanja, njihove komunikacije in pripadajočo vgrajeno opremo.
Podrobno smo proučili proces in korake načrtovanja in vodenja projekta, poleg tega pa je
potrebno podrobno spoznati komunikacijske protokole in standarde, ki se uporabljajo za
komunikacijo, način mreženja sistema, tehnične podrobnosti opreme ter način delovanja in
krmiljenja celotnega sistema.
1.3 Predvidene metode magistrskega dela
Primarno smo pri raziskovanju uporabili metode analize, s katerimi smo bolj zapletene pojme
razčlenili na enostavnejše dele in elemente; metodo sinteze, s katero smo enostavnejše dele
združili v kompleksnejšo smiselno celoto; metodo klasifikacije ter metodo deskripcije, s
pomočjo katerih smo opisali projektno vodenje in sisteme, vgrajene v objekt.
Primarne podatke smo pridobili s pregledom domače in tuje strokovne literature, projektne
dokumentacije ter dostopne literature na internetu. Poleg tega smo številne podatke pridobili
prek ustnega izročila oziroma iz razgovora z inženirji in vodji projektov, ki so zadolženi za
izvedbo projekta, ter z ogledom terena in s sodelovanjem z zaposlenimi v Regionalni
energetski agenciji severozahodne Hrvaške.
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
4
2 PROTOKOLI IN ODPRTI STANDARDI V HIŠNOJ
AVTOMATIZACIJI
2.1 Protokol
»Protokol (angl. protocol) je formalen opis pravil za izmenjavo sporočil, ki jih je treba
spoštovati, da se lahko med seboj sporazumevajo računalniški sistemi v omrežju« [3].
2.2 Referenčni model ISO/OSI
Referenčni modeli definirajo koncepte in potrjujejo pravila povezovanja sistema v mrežo.
Omogočajo standardizacijo komunikacijskih procesov in kompatibilnost naprave s
ponujanjem rešitev, s pomočjo katerih se ustvarjajo komunikacijski sistemi neodvisno od
proizvajalca opreme. Od številnih referenčnih modelov za osnovnega velja model OSI z
navpično delitvijo na plasti. Ta model je leta 1979 ustvarila Mednarodna organizacija za
standardizacijo (angl. International Organisation for Standardisation − ISO) in je po
določenih revizijah prisoten še danes. Model je sestavljen iz sedmih plasti, razdeljenih v dve
skupini, kot prikazuje Slika 2.1. Fizična, podatkovna, mrežna in transportna plast spadajo med
transportno usmerjene plasti in opravljajo nalogo transporta uporabniških in upravljavskih
informacij. Sejna, predstavitvena in aplikacijska plast usklajujejo aplikacijske procese in jih
uvrščamo med uporabniško usmerjene plasti. Poudariti je treba, da je takšen model, skupaj z
vsemi poenostavitvami, precej zapleten in v svoji strukturi premalo precizno definira meje
posameznih plasti in nalog. Pogost je primer, da posamezni protokoli združujejo določene
plasti, pogoste pa so tudi dodatne razlage. Zaradi tega je nekatere protokole včasih težko
strukturirati in implementirati na osnovi referenčnega modela. Druga težava je, da je bil ta
model prepozno standardiziran. Kljub določenim težavam pa model ISO/OSI postaja splošni
model za ustvarjanje protokola in je vodilni na področju standardizacije komunikacijskih
sistemov. Jasno določa fizično povezavo, protokolarne storitve in uporabniške vmesnike, zato
je primeren kot komunikacijska referenca v sistemih pametnih hiš. Zaradi tega smo v
naslednjem delu podrobneje opisali naloge posameznih plasti, da bi dobili boljši vpogled v
protokole, ki se uporabljajo pri hišni avtomatizaciji [1].

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
5
Slika 2.1: Plastna arhitektura ISO/OSI
Fizična plast (1) (angl. Physical Layer)
Plast, ki opisuje fizične, tj. električne lastnosti informacij in podatkov, ki se prenašajo prek
določenih medijev. Opisuje pristop h komunikacijskemu kanalu (modulacije, redukcija,
napetostne razlike, impedanca, vrsta priključka in podobno). Medij ni del fizične plasti,
vendar se lastnosti medija upoštevajo v postopkih pristopa.
Povezovalna plast (2) (angl. Data Link Layer)
Opisuje neposredno povezavo med dvema mrežnima vozloma in tako zagotavlja prenos
podatkov. To vključuje generiranje in prenos podatkovnih okvirov (angl. frames), obenem pa
tudi procesiranje potrditvenih okvirov z namenom zanesljivega prejema podatkov. Ta plast
obenem s preverjanjem ciklične redundance (angl. Cyclic redudancy check − CRC) upravlja z
morebitnimi napakami.
Omrežna plast (3) (angl. Network Layer)
Služi kot delitelj uporabnih in popolnoma prenosnih procesov. Preverja mrežno pot med
mrežnimi vozli in usmerja enote podatkov, tj. pakete. Povezuje funkcionalne naprave in
upravlja funkcionalni tok podatkov ter napake.
Transportna plast (4) (angl. Transport Layer)
Definira izvor in končno destinacijo informacije ter zagotavlja zanesljiv prenos podatkov med
napravama t. i. prenos od mesta do mesta. Končna destinacija ne rabi biti ena naprava, lahko
gre za skupino naprav ali celotno mrežo. Transportna plast določa tok podatkov glede na dane

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
6
naprave in dodatno upravlja z napakami. Če ugotovi, da so določeni podatki manjkajo, zažene
ponovni prenos.
Plast seje (5) (angl. Session Layer)
Določeno število vozlov združi v »sejo« in sinhronizira komunikacijo. Ta sloj je odgovoren
za zanesljivo nadaljevanje povezave po prekinitvi komunikacije na istem mestu, kjer je prišlo
do prekinitve. Zagotavlja delovanje aplikacije v višjih plasteh in spada med uporabniško
usmerjene plasti.
Predstavitvena plast (6) (angl. Presentation Layer)
Ta plast dostavljene podatke interpretira in strukturira kodirane podatke, tj. izvaja semantične
in skladenjske naloge. To zagotavlja neodvisnost aplikacijskih procesov pri načinu
prikazovanja podatkov.
Aplikacijska plast (7) (angl. Application Layer)
Ta sloj je dejansko uporabniški vmesnik in uporabnikom omogoča dostop do komunikacije.
Zagotavlja jim storitve, a po drugi strani postavlja pogoje za realizacijo teh uslug. Zahtevki, ki
se izvajajo po zaslugi nižjih plasti, so dejansko bistvo celotne komunikacijske verige.
Pogosto se zadnje tri z modelom OSI definirane plasti zaradi majhnih zasebnih odgovornosti
združujejo v edinstveno aplikacijsko plast, ki vrši naloge za vse tri plasti. Podobno je tudi pri
protokolu hišne avtomatizacije.
2.3 Topologija
Mreža je opisana s topologijo vozlov, tj. naprav v primeru hišne avtomatizacije. Topologija
omogoča vpogled v celotni sistem in določa implementacijo protokola. Dejansko določa način
povezovanja fizičnih plasti naprav v komunikacijskem sistemu. V hišni avtomatizaciji
prevladuje 6 osnovnih oblik: prstan, zvezda, vodilo, steblo, decentralizirana in heterogena
oblika. Na Sliki 2.2 je prikazana oblika omenjenih topologij.
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
7
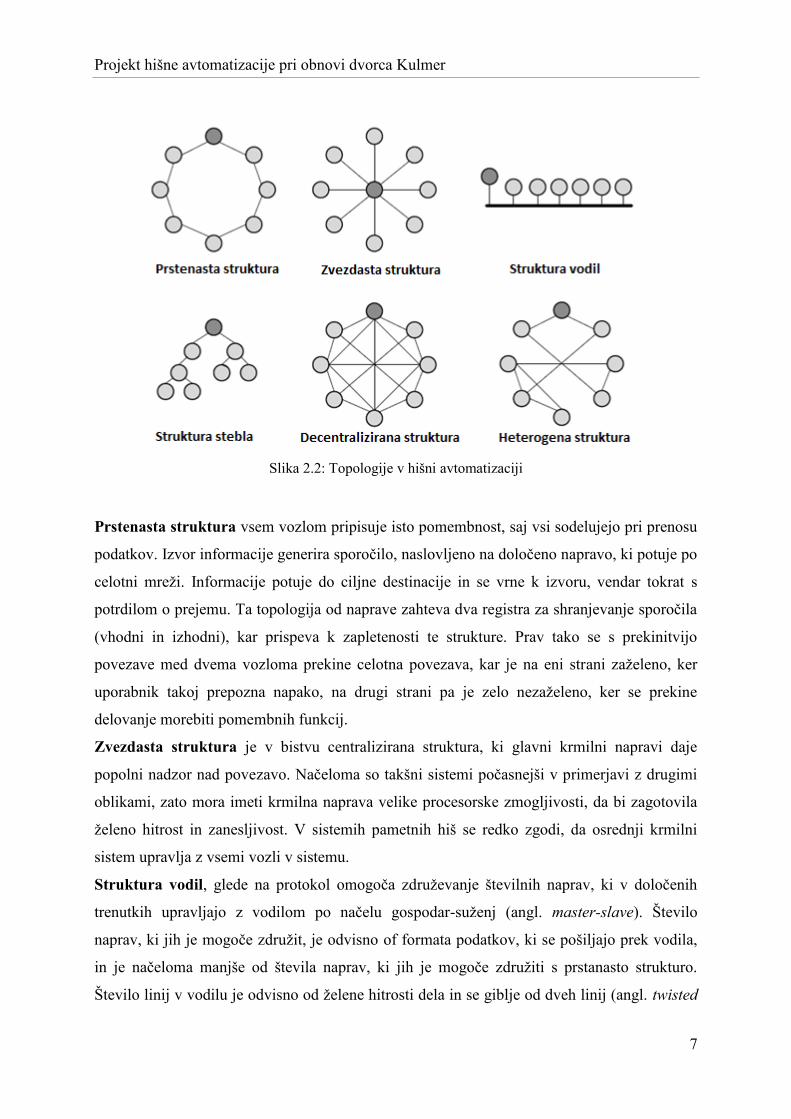
Slika 2.2: Topologije v hišni avtomatizaciji
Prstenasta struktura vsem vozlom pripisuje isto pomembnost, saj vsi sodelujejo pri prenosu
podatkov. Izvor informacije generira sporočilo, naslovljeno na določeno napravo, ki potuje po
celotni mreži. Informacije potuje do ciljne destinacije in se vrne k izvoru, vendar tokrat s
potrdilom o prejemu. Ta topologija od naprave zahteva dva registra za shranjevanje sporočila
(vhodni in izhodni), kar prispeva k zapletenosti te strukture. Prav tako se s prekinitvijo
povezave med dvema vozloma prekine celotna povezava, kar je na eni strani zaželeno, ker
uporabnik takoj prepozna napako, na drugi strani pa je zelo nezaželeno, ker se prekine
delovanje morebiti pomembnih funkcij.
Zvezdasta struktura je v bistvu centralizirana struktura, ki glavni krmilni napravi daje
popolni nadzor nad povezavo. Načeloma so takšni sistemi počasnejši v primerjavi z drugimi
oblikami, zato mora imeti krmilna naprava velike procesorske zmogljivosti, da bi zagotovila
želeno hitrost in zanesljivost. V sistemih pametnih hiš se redko zgodi, da osrednji krmilni
sistem upravlja z vsemi vozli v sistemu.
Struktura vodil, glede na protokol omogoča združevanje številnih naprav, ki v določenih
trenutkih upravljajo z vodilom po načelu gospodar-suženj (angl. master-slave). Število
naprav, ki jih je mogoče združit, je odvisno of formata podatkov, ki se pošiljajo prek vodila,
in je načeloma manjše od števila naprav, ki jih je mogoče združiti s prstanasto strukturo.
Število linij v vodilu je odvisno od želene hitrosti dela in se giblje od dveh linij (angl. twisted
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
8
pair – TP), po katerih se prenašajo podatkovni in upravljavski okviri z omejeno hitrostjo, do
velika števila linij (del naslovnih, del podatkovnih in del sinhronizacijskih), s čimer se doseže
velike hitrosti. V naprave je prav tako treba implementirati metodo pristopa k vodilu, t. i.
arbitražo. Najpogosteje se uporablja t. i. CSMA/CA arbitraža (angl. Carrier sense multiple
access with collision avoidance).
Struktura stebla nastane zaradi potrebe po funkcionalnem uskupinjevanju naprav in s tem
poenostavlja izvajanje želenih funkcij. To je zelo pogosto v sistemih hišne avtomatizacije,
kjer določena naprav odgovarja svoji nadzorni napravi vse do glavne krmilne naprave. Takšna
hierarhija je zelo produktivna, v določenih situacijah pa ni zaželena.
Decentralizirana struktura omogoča vsem vozlom določeno vrsto avtonomije in v sistemih
ustvarja velike hitrosti. Namestitev takšne oblike je infrastrukturno zahtevna. V pametni hiši
si je težko zamisliti, da bi bil vsak par naprav medsebojno povezan z žico. V primeru radijske
komunikacije pride do velike nezanesljivosti zaradi velikega števila uporabnikov istega
frekvenčnega področja. Zaradi tega obstaja trend heterogenizacije naprav do določene mere.
Heterogena struktura v določeni meri združuje iste funkcijske naprave in za razliko od
stebla zagotavlja določeno avtonomijo ter dosega večje delovne hitrosti. Takšna struktura
vključuje elemente zvezde, prstana in stebla. Proces decentralizacije je omejen s prostorskimi
in tehnološkimi specifikacijami, rezultat česar je heterogeni sistem.
2.4 Modbus protokol
Modbus komunikacijski protokol je leta 1979 razvil proizvajalec Modicon (danes je to
Schneider Electric´s Telemecanique). Gre za izmenjavo podatkov med napravami s sporočili,
ki temelji na komunikaciji gospodar-suženj. Najpogostejši fizični medij je bil na začetku
RS232, ki pa ga je kmalu nadomestil RS485. Slednji je omogočal več naprav na vodilu,
bistveno večje razdalje med njimi in večjo neobčutljivost na motnje. Modbus protokol ni
odvisen od fizičnega medija, po kateri se prenaša, zato so prisotne implementacije tudi za
druge medije npr. TCP/IP in brezžična omrežja. Ker so bile specifikacije protokola odprte in
zanj niso bile potrebne licence, poleg tega pa je bila njegova implementacija preprosta, so ga
kmalu začela uporabljati mnoga podjetja, ki so bila prisotna na trgu PLC-krmilnikov. Danes
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
9
ga lahko zasledimo ne samo v krmilnikih, ampak se uporablja tudi za različne elektronske
mikroprocesorske naprave, ki ga uporabljajo za prenos podatkov [3].
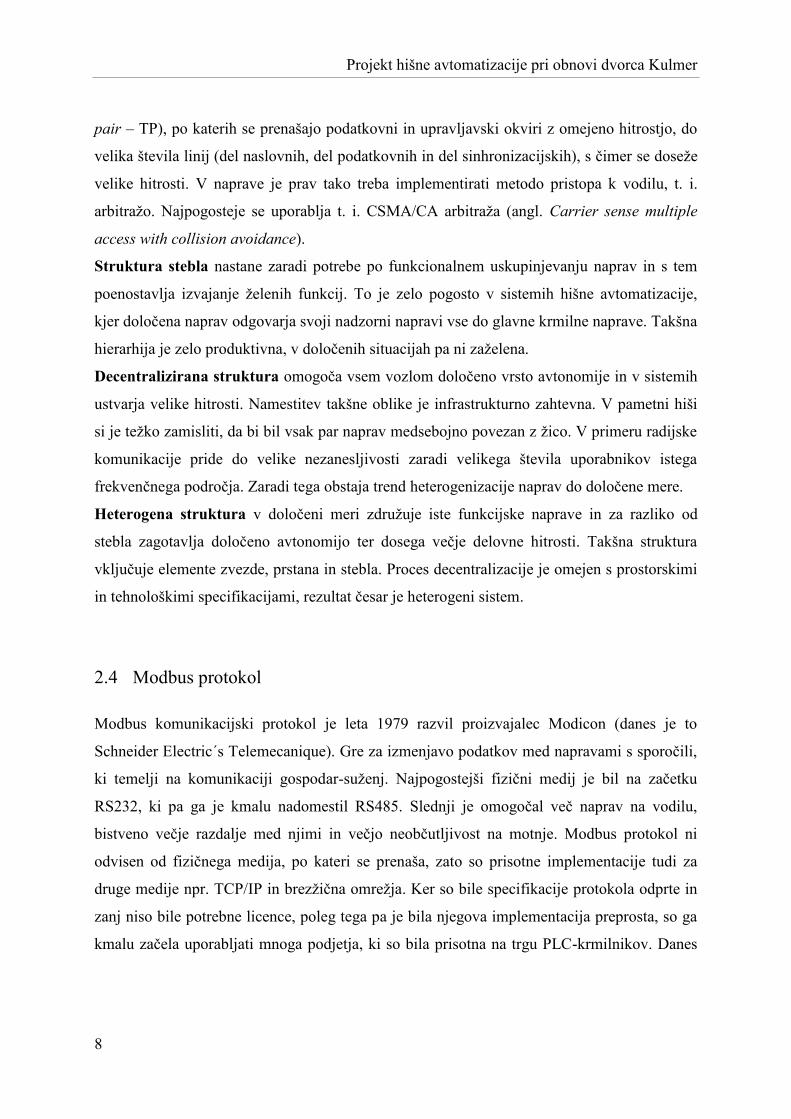
Naslednja slika 2.3 prikazuje splošno predstavitev RTU, ASCII in TCP/IP različic Modbus
komunikacijskega protokola v primerjavi s 7 plastmi modela OSI.
Slika 2.3: Modbus protokol v modelu ISO/OSI
Prenos podatkov
Pri serijskem prenosu se uporabljata dva načina prenosa, in sicer ASCII in RTU, ki določata
način kodiranja sporočil. Vsako sporočilo je sestavljeno iz istih delov: okvirja, naslovnega
dela, funkcijske kode, podatkovnega dela in dela za preverjanje točnosti sporočila, kot je
prikazano na slikah 2.4 in 2.5.
Okvir služi za označevanje začetka in konca sporočila, razlikuje pa se glede na način prenosa.
Koda prenosa ASCII je sestavljena iz dvopičja na začetku in znaka CRLF na koncu sporočila,
medtem ko se pri prenosu RTU kot okvir uporabljajo določeni premori pri prenosu podatkov.
Del za naslov je sestavljen iz dveh znakov ASCII oziroma 8 bitov. Enote suženj imajo
naslove v razponu od 1 do 247, med tem ko naslov ničel označuje ukaz »broadcast«.
Gospodar v naslovni del sporočila postavlja naslov, na katerega se sporočilo pošilja, enota
suženj pa v naslovni del postavlja svoj naslov.
Funkcijski del je sestavljen iz dveh znakov ASCII oziroma 8 bitov. Zajema funkcijsko kodo
sporočila v razponu od 0 do 255, ki enoti suženj prenese ukaz, ki ga mora izvršiti. Enota
suženj v odgovoru vrne nespremenjeno funkcijsko kodo v primeru prejema sporočila, v

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
10
primeru, da ukaza ni bilo mogoče izvršiti zaradi napake v vsebini sporočila, pa vrne
funkcijsko kodo, kjer je najvišji bit 1. Primeri ukazov, ki jih gospodar lahko pošlje enoti
suženj, so preverjanje statusa vhodnih pinov, branje vsebine registra, diagnostično preverjanje
enote suženj, pisanje v registre, sprememba stanja izhodnih pinov, nalaganje, snemanje in
preverjanje programa kontrolerja.
Podatkovni del je sestavljen iz parov heksadecimalnih znakov (0x00 do 0xFF), pri čemer
lahko ti glede na vrsto prenosa predstavljajo par znakov ASCII ali en znak RTU. Gospodar v
ta del sporočila vpisuje naslove registrov ali zunanjih pinov, h katerim je treba pristopiti,
število zahtevanih podatkov, če gospodar pošlje podatke, ki jih je treba nekje vpisati, število
bajtov podatkov in posledično podatke same. Za nekatere ukaze enota suženj ne potrebuje
dodatnih podatkov, ampak zadostuje funkcijska koda, tako nekatera sporočila ne zajemajo
podatkovnega dela. Enota suženj v podatkovnem delu odgovora pošilja zahtevane podatke ali
pa kodo napake, če iz nekega razloga ni zmožna izvršiti poslani ukaz.
Preverjanje pravilnosti sporočila je obvezno in poteka neodvisno od izbire paritetnega
preverjanja znakov. Glede na vrsto prenosa se pravilnost sporočila preverja s pomočjo
preračuna LRC za ASCII oziroma CRC za RTU. Preračun izvede enota gospodar pri
pošiljanju sporočila in vpisuje rezultat na konec sporočila, pred znakom, ki označuje konec.
Enota suženj med prejemom sporočila znova preračuna LRC oziroma CRC in primerja
rezultat s tistim, ki ga je poslal gospodar. Če se rezultati razlikujejo, to pomeni, da je prišlo do
napake med prenosom podatkov.
LRC se uporablja za sporočilo brez dvopičja in znaka CRLF, a je sestavljen iz dveh znakov
ASCII (1 bajt). LRC se preračunava s seštevanjem bajtov sporočila z zavračanjem prenosa, po
tem pa nad rezultatom izvede operacija dvojnega dopolnjevanja.
CRC se uporablja za celotno sporočilo, vendar se v preračunu upošteva samo 8 podatkovnih
bitov vsake besede, brez start in stop ter paritetnih bitov. CRC je sestavljen iz dveh bajtov, ki
se postavljajo na konec sporočila, pri čemer se najprej vpisuje nižji in nato višji bajt. Preračun
CRC se izvede na naslednji način:
1. 16-bitni register se napolni z enicami,
2. za 8-bitni znak in vsebino registra se izvede operacija ekskluzivno (XOR),
3. rezultat se pomakne za 1 bit v smeri najnižjega bita (LSB),
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
11
4. v najvišji bit (MSB) se vpiše ničla,
5. če je LSB = 1, se izvede operacija XOR za vsebino registra in neko predhodno
definirano vrednost.
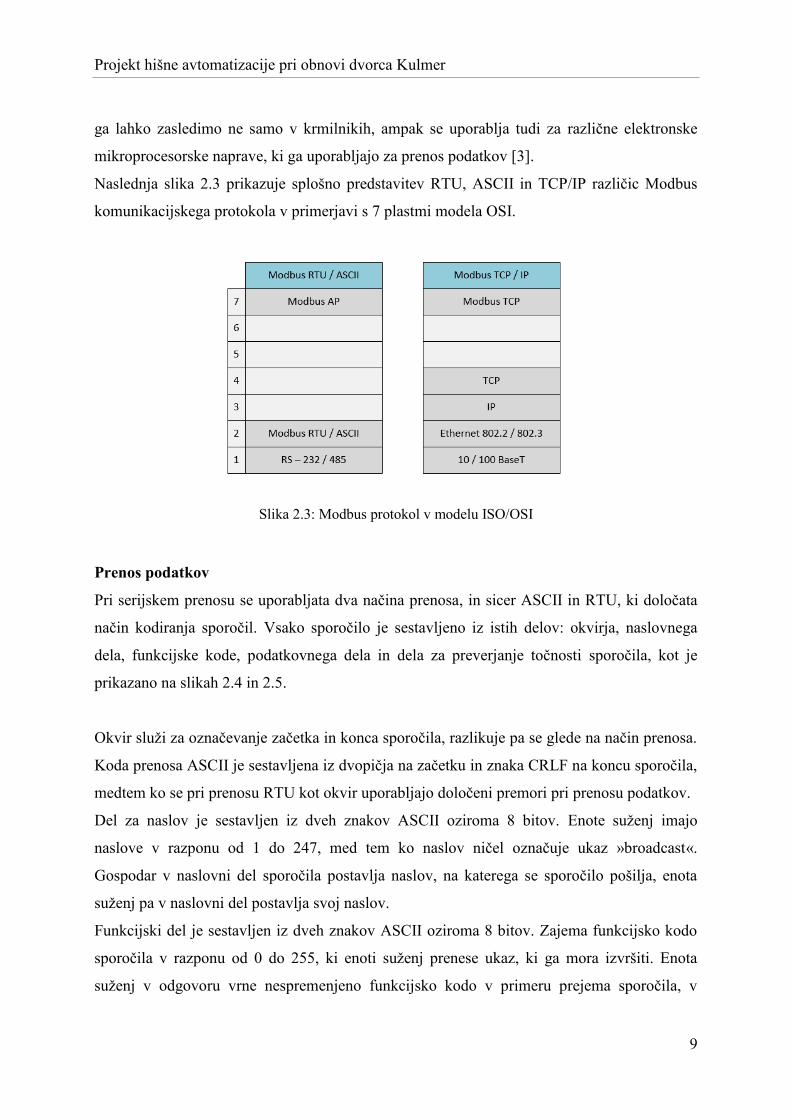
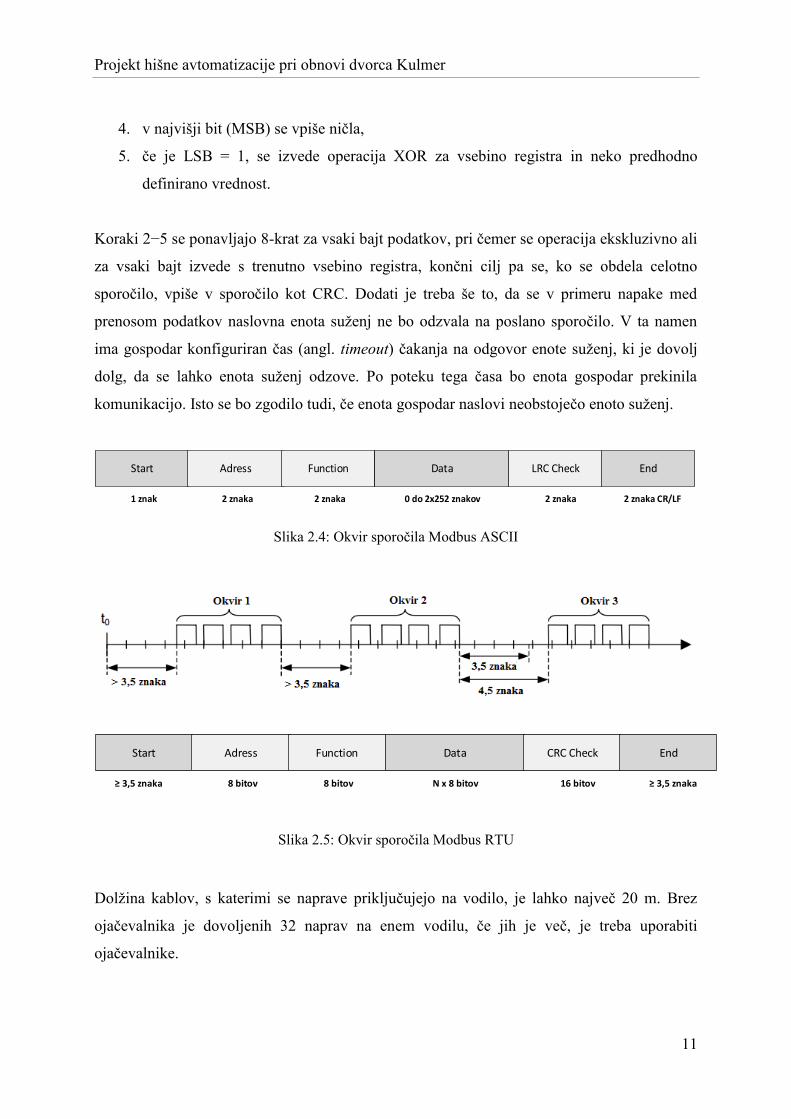
Koraki 2−5 se ponavljajo 8-krat za vsaki bajt podatkov, pri čemer se operacija ekskluzivno ali
za vsaki bajt izvede s trenutno vsebino registra, končni cilj pa se, ko se obdela celotno
sporočilo, vpiše v sporočilo kot CRC. Dodati je treba še to, da se v primeru napake med
prenosom podatkov naslovna enota suženj ne bo odzvala na poslano sporočilo. V ta namen
ima gospodar konfiguriran čas (angl. timeout) čakanja na odgovor enote suženj, ki je dovolj
dolg, da se lahko enota suženj odzove. Po poteku tega časa bo enota gospodar prekinila
komunikacijo. Isto se bo zgodilo tudi, če enota gospodar naslovi neobstoječo enoto suženj.
Start Adress Function Data LRC Check End
1 znak 2 znaka 2 znaka 0 do 2x252 znakov 2 znaka 2 znaka CR/LF
Slika 2.4: Okvir sporočila Modbus ASCII
Start Adress Function Data CRC Check End
3,5 znaka 8 bitov 8 bitov N x 8 bitov 16 bitov 3,5 znaka
Slika 2.5: Okvir sporočila Modbus RTU
Dolžina kablov, s katerimi se naprave priključujejo na vodilo, je lahko največ 20 m. Brez
ojačevalnika je dovoljenih 32 naprav na enem vodilu, če jih je več, je treba uporabiti
ojačevalnike.

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
12
Kadar na kablu RS485 ni aktivnosti, so linije bolj dovzetne na motnje iz okolja. Zaradi tega je
treba zagotoviti polarizacijo linije (angl. line polarization). Ta je po navadi izvedena na
gospodarju (angl. master). V dokumentaciji za Modbus napravo mora biti dokumentirano, če
naprava potrebuje polarizacijo oz. če je implementirana v napravi. Na vodilu lahko le ena
naprava izvaja polarizacijo. Za polarizacijo se uporabi »pull-up« upor, ki ga priključimo na
5 V (D1), in »pull-down« upor (D0), ki je povezan na ozemljitveno linijo (Slika 2.6). Velikost
uporov mora biti med 450 Ω in 650 Ω, pri čemer višja upornost omogoča večje število naprav
na liniji [4].
Slika 2.6: Modbus povezava gospodar-suženj
Zahtevane hitrosti prenosa so 9.600 bps in 19.200 bps, medtem ko so višje oz. nižje hitrosti
opcijske. 19.200 bps je privzeta hitrost za naprave. Vsaka implementirana hitrost prenosa ima
lahko največ 1 % napake pri oddaji in mora prenesti 2 % napako pri sprejemu (odstopanje od
hitrosti).
Modbus TCP/IP
Modbus TCP/IP je Modbus protokol RTU z vmesnikom TCP, ki deluje prek Etherneta.
Struktura sporočila je aplikacijski protokol, ki definira pravila za organizacijo in razlago
podatkov neodvisno od medija prenosa. Preprosto povedano, TCP/IP omogoča izmenjavo
binarnih blokov podatkov med računalniki (slika 2.7). Primarna funkcija TCP je zagotoviti,
da so vsi paketi podatkov pravilno prejeti, medtem ko IP poskrbi, da so sporočila pravilno
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
13
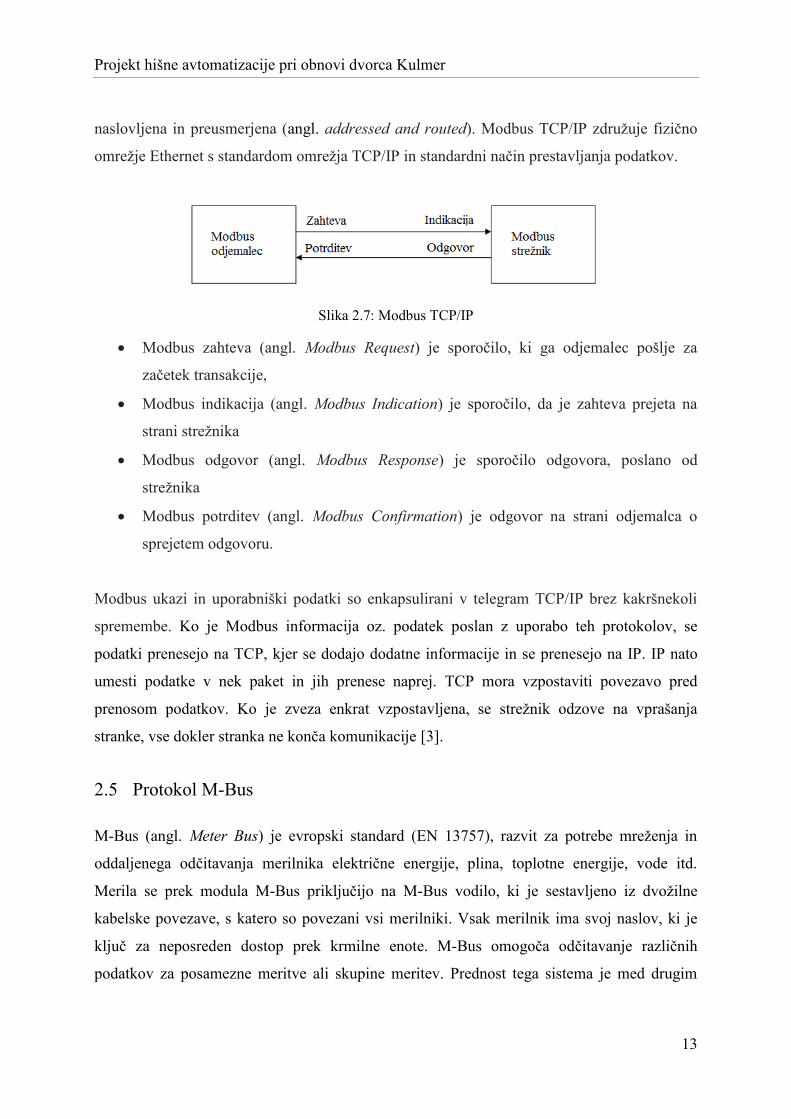
naslovljena in preusmerjena (angl. addressed and routed). Modbus TCP/IP združuje fizično
omrežje Ethernet s standardom omrežja TCP/IP in standardni način prestavljanja podatkov.
Slika 2.7: Modbus TCP/IP
• Modbus zahteva (angl. Modbus Request) je sporočilo, ki ga odjemalec pošlje za
začetek transakcije,
• Modbus indikacija (angl. Modbus Indication) je sporočilo, da je zahteva prejeta na
strani strežnika
• Modbus odgovor (angl. Modbus Response) je sporočilo odgovora, poslano od
strežnika
• Modbus potrditev (angl. Modbus Confirmation) je odgovor na strani odjemalca o
sprejetem odgovoru.
Modbus ukazi in uporabniški podatki so enkapsulirani v telegram TCP/IP brez kakršnekoli
spremembe. Ko je Modbus informacija oz. podatek poslan z uporabo teh protokolov, se
podatki prenesejo na TCP, kjer se dodajo dodatne informacije in se prenesejo na IP. IP nato
umesti podatke v nek paket in jih prenese naprej. TCP mora vzpostaviti povezavo pred
prenosom podatkov. Ko je zveza enkrat vzpostavljena, se strežnik odzove na vprašanja
stranke, vse dokler stranka ne konča komunikacije [3].
2.5 Protokol M-Bus
M-Bus (angl. Meter Bus) je evropski standard (EN 13757), razvit za potrebe mreženja in
oddaljenega odčitavanja merilnika električne energije, plina, toplotne energije, vode itd.
Merila se prek modula M-Bus priključijo na M-Bus vodilo, ki je sestavljeno iz dvožilne
kabelske povezave, s katero so povezani vsi merilniki. Vsak merilnik ima svoj naslov, ki je
ključ za neposreden dostop prek krmilne enote. M-Bus omogoča odčitavanje različnih
podatkov za posamezne meritve ali skupine meritev. Prednost tega sistema je med drugim

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
14
hitro odčitavanje brez napak, podatki so predstavljeni v čitljivem elektronskem formatu in jih
je mogoče dodatno obdelati. Koncept temelji na referenčnem modelu ISO/OSI za
vzpostavitev odprtega sistema, ki bi lahko uporabljal skoraj vsak želeni protokol [5].
Slika 2.8: M-Bus v modelu ISO/OSI
M-Bus ni omrežje in zato ne potrebuje transportne seje plasti ter predstavitvene plasti. Zaradi
tega so ravni 4−6 modela OSI prazne (slika 2.8). Za komunikacijo se uporabljajo funkcije
fizične plasti, povezovalne plasti, omrežne in aplikacije plasti.
Temelji na hierarhičnem sistemu gospodar-suženj, kjer komunikacijo nadzoruje osrednja
enota − gospodar. Uporabi se lahko M-Bus osrednja enota kot tudi nivojski pretvornik s
serijskim priključnim mestom RS-232 ali po izbiri druga inteligentna osrednja enota. Končne
naprave, tj. suženj, so podrejene enoti gospodar. Princip tega sistema M-Bus je prikazan na
Sliki 2.9. Končne naprave so lahko priključene na glavni vod vzporedno ali v obliki zvezde.
Največja razdalja med napravama gospodar in suženj je 350 m z maksimalnim priklopom 250
suženj naprav. Hitrosti prenosa so od 300 do 9.600 baudov [6].
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
15
Gospodar
Suženj 1 Suženj 2 Suženj 3
M- bus
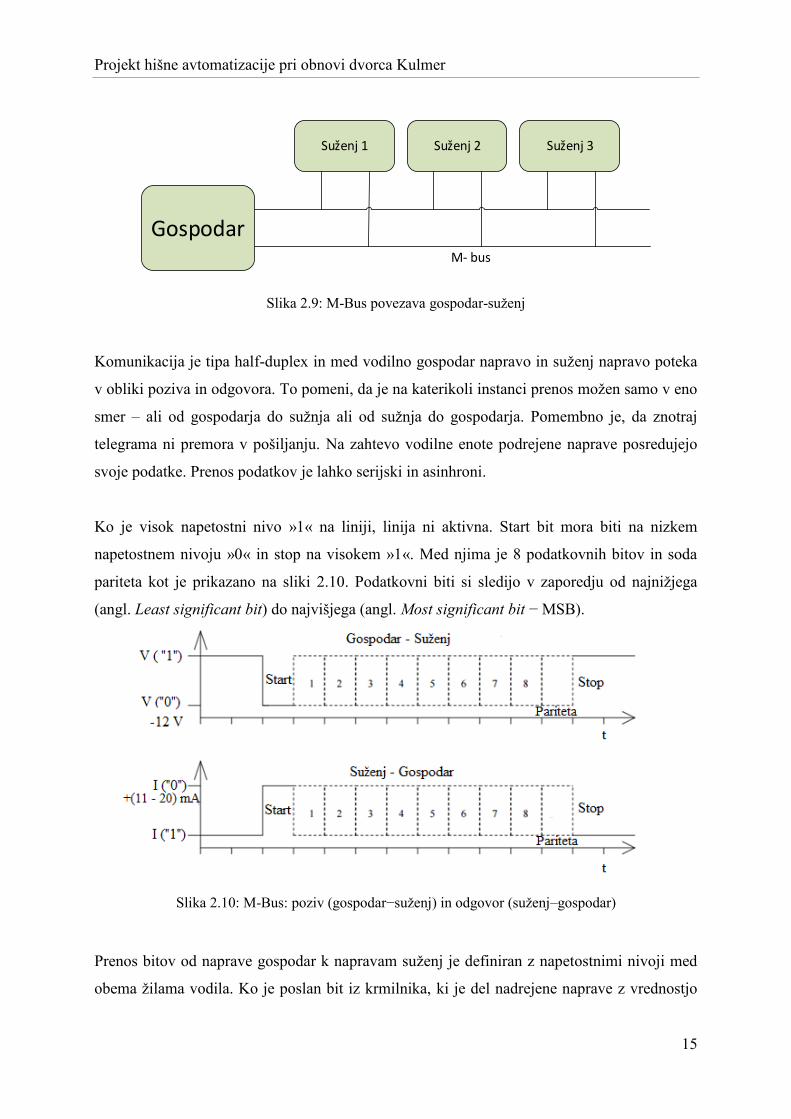
Slika 2.9: M-Bus povezava gospodar-suženj
Komunikacija je tipa half-duplex in med vodilno gospodar napravo in suženj napravo poteka
v obliki poziva in odgovora. To pomeni, da je na katerikoli instanci prenos možen samo v eno
smer – ali od gospodarja do sužnja ali od sužnja do gospodarja. Pomembno je, da znotraj
telegrama ni premora v pošiljanju. Na zahtevo vodilne enote podrejene naprave posredujejo
svoje podatke. Prenos podatkov je lahko serijski in asinhroni.
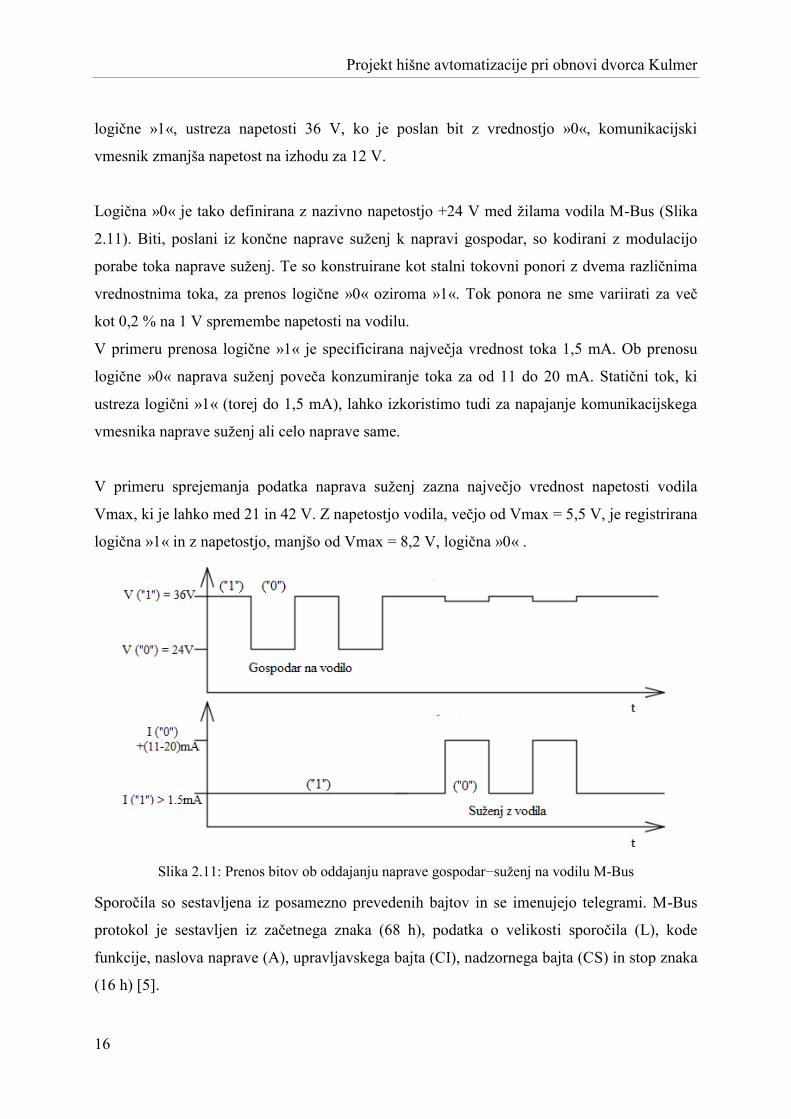
Ko je visok napetostni nivo »1« na liniji, linija ni aktivna. Start bit mora biti na nizkem
napetostnem nivoju »0« in stop na visokem »1«. Med njima je 8 podatkovnih bitov in soda
pariteta kot je prikazano na sliki 2.10. Podatkovni biti si sledijo v zaporedju od najnižjega
(angl. Least significant bit) do najvišjega (angl. Most significant bit − MSB).
Slika 2.10: M-Bus: poziv (gospodar−suženj) in odgovor (suženj–gospodar)
Prenos bitov od naprave gospodar k napravam suženj je definiran z napetostnimi nivoji med
obema žilama vodila. Ko je poslan bit iz krmilnika, ki je del nadrejene naprave z vrednostjo
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
16
logične »1«, ustreza napetosti 36 V, ko je poslan bit z vrednostjo »0«, komunikacijski
vmesnik zmanjša napetost na izhodu za 12 V.
Logična »0« je tako definirana z nazivno napetostjo +24 V med žilama vodila M-Bus (Slika
2.11). Biti, poslani iz končne naprave suženj k napravi gospodar, so kodirani z modulacijo
porabe toka naprave suženj. Te so konstruirane kot stalni tokovni ponori z dvema različnima
vrednostnima toka, za prenos logične »0« oziroma »1«. Tok ponora ne sme variirati za več
kot 0,2 % na 1 V spremembe napetosti na vodilu.
V primeru prenosa logične »1« je specificirana največja vrednost toka 1,5 mA. Ob prenosu
logične »0« naprava suženj poveča konzumiranje toka za od 11 do 20 mA. Statični tok, ki
ustreza logični »1« (torej do 1,5 mA), lahko izkoristimo tudi za napajanje komunikacijskega
vmesnika naprave suženj ali celo naprave same.
V primeru sprejemanja podatka naprava suženj zazna največjo vrednost napetosti vodila
Vmax, ki je lahko med 21 in 42 V. Z napetostjo vodila, večjo od Vmax = 5,5 V, je registrirana
logična »1« in z napetostjo, manjšo od Vmax = 8,2 V, logična »0« .
Slika 2.11: Prenos bitov ob oddajanju naprave gospodar−suženj na vodilu M-Bus
Sporočila so sestavljena iz posamezno prevedenih bajtov in se imenujejo telegrami. M-Bus
protokol je sestavljen iz začetnega znaka (68 h), podatka o velikosti sporočila (L), kode
funkcije, naslova naprave (A), upravljavskega bajta (CI), nadzornega bajta (CS) in stop znaka
(16 h) [5].
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
17
2.6 Protokol TCP/IP
Model TCP/IP je razvilo ameriško obrambno ministrstvo (angl. Department of Defense −
DoD). Kot odprti standard je bil na voljo vsem, zaradi česar se je tudi hitro razvijal in postal
standardni internetni protokol. Nastal je leta 1973 in že leta 1983 postal univerzalni »jezik«
interneta. Vsebuje in nadzira vse vidike komunikacije.
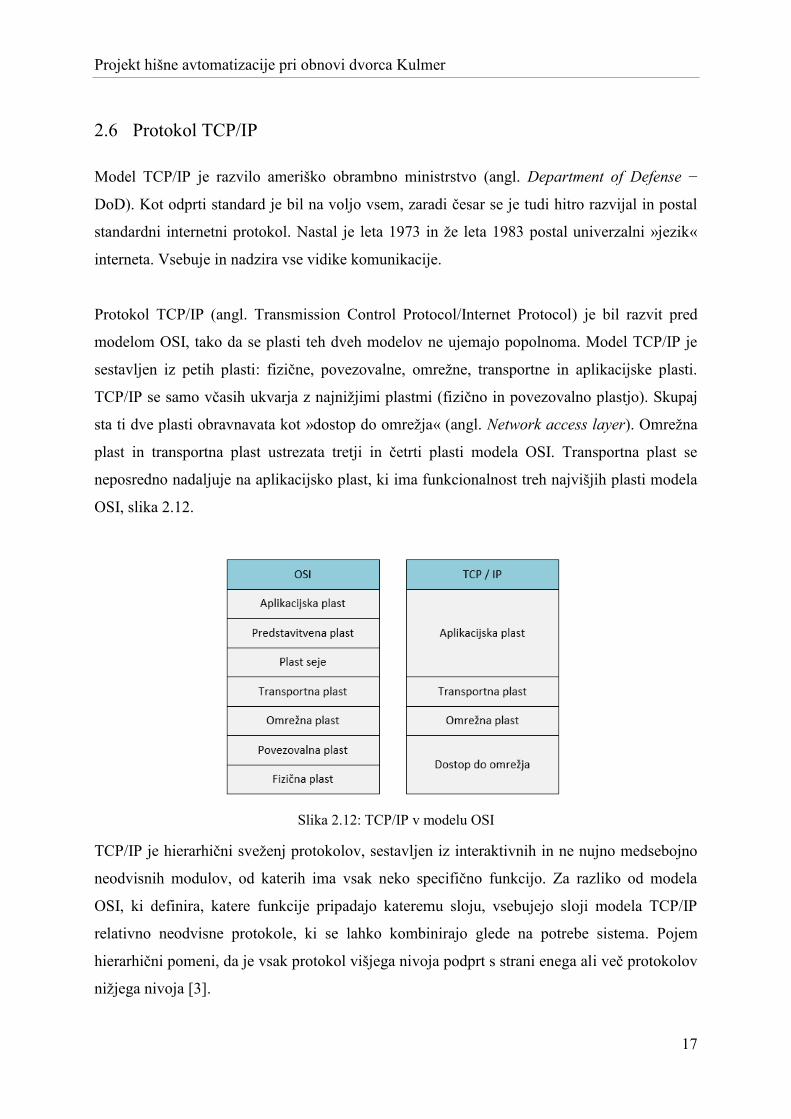
Protokol TCP/IP (angl. Transmission Control Protocol/Internet Protocol) je bil razvit pred
modelom OSI, tako da se plasti teh dveh modelov ne ujemajo popolnoma. Model TCP/IP je
sestavljen iz petih plasti: fizične, povezovalne, omrežne, transportne in aplikacijske plasti.
TCP/IP se samo včasih ukvarja z najnižjimi plastmi (fizično in povezovalno plastjo). Skupaj
sta ti dve plasti obravnavata kot »dostop do omrežja« (angl. Network access layer). Omrežna
plast in transportna plast ustrezata tretji in četrti plasti modela OSI. Transportna plast se
neposredno nadaljuje na aplikacijsko plast, ki ima funkcionalnost treh najvišjih plasti modela
OSI, slika 2.12.
Slika 2.12: TCP/IP v modelu OSI
TCP/IP je hierarhični sveženj protokolov, sestavljen iz interaktivnih in ne nujno medsebojno
neodvisnih modulov, od katerih ima vsak neko specifično funkcijo. Za razliko od modela
OSI, ki definira, katere funkcije pripadajo kateremu sloju, vsebujejo sloji modela TCP/IP
relativno neodvisne protokole, ki se lahko kombinirajo glede na potrebe sistema. Pojem
hierarhični pomeni, da je vsak protokol višjega nivoja podprt s strani enega ali več protokolov
nižjega nivoja [3].

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
18
3 KONNEX (KNX) ELEKTRIČNE INŠTALACIJE
Konnex je nastal z združitvijo treh evropskih standardov za avtomatizacijo zgradb s ciljem, da
bi imeli en standard, ki bi pokrival celotno področje [7]. Standardi, ki so bili združeni, so:
• EIB (angl. European Installation Bus),
• EHS (angl. European Home System),
• Batibus.
KNX je danes vodilni svetovni sistem inteligentne električne inštalacije, ki bo slej kot prej
popolnoma zamenjal tradicionalne električne inštalacije in omogočal, da življenjski prostor
prilagodimo svojim potrebam in željam. Sistem KNX lahko prevzema skrb in nadzor nad
vsemi funkcijami v zgradbi. Nima nobenih tehničnih omejitev v smislu obsega sistema ali
preobremenjenosti informacijskega protokola. Vse je izključno odvisno od kreativnosti
projektanta in želj uporabnika. Deluje kot določeno število komponent, nameščenih v
prostoru, od katerih vsaka izvaja funkcijo, za katero je zadolžena.
Pri klasičnih električnih inštalacijah je porabnik vedno priključen neposredno. Stikalo in/ali
senzor je neposredno povezano na porabnika ali prek inštalacijskega releja. Funkcijo
porabnika določa način povezave s stikalom ali senzorjem. V električnih inštalacijah s
tehnologijo KNX je porabnik priključen posredno. Vsi operativni elementi, ki jih imenujemo
senzorji, in vsi izvršni elementi, ki jih imenujemo aktuatorji, so povezani s skupnim
prenosnim medijem. Če se na primer pritisne stikalo, to pošlje informacijo oz. podatkovni
telegram (angl. data telegram) prek prenosnega medija do pridruženega aktuatorja, ki potem
vključi porabnika oz. več porabnikov. Delovanje se modificira programsko s pomočjo
programskega paketa ETS (angl. Engineering Tool Software) ali v nekaterih enostavnejših
primerih z uporabo tipke za programiranje na napravi.
3.1 Prednosti standarda KNX
Prednosti standarda KNX so medsebojna usklajenost, neodvisno od proizvajalcev posameznih
delov, ob visoki kakovosti proizvodov zaradi doseženega nadzora kakovosti in profesionalne
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
19
verifikacije proizvodov KNX na osnovi funkcionalnosti, določene s standardom EN 50090 .
Standard je zaradi njegove prilagodljivosti mogoče koristiti v stavbenih, poslovnih in
industrijskih objektih z uporabo različnih tipov komunikacije [9]. Prav tako je mogoče
funkcije naprave z različnih področij medsebojno povezati, naknadne spremembe in
nadgradnje pa so enostavne in ne zahtevajo ponovnega načrtovanja izvedbe inštalacij in
napeljav. Spremembe in razširitve so mogoče tudi po številnih letih, saj so nove naprave
kompatibilne z obstoječimi. Inštalacija se izvede kot do zdaj v konvencionalnih stikalnih
omaricah, napeljava pa je bolj pregledna in enostavnejša. Sistem omogoča različne funkcije,
ki povečujejo udobje zaradi uporabe logičnih operacij, na katere v konvencionalnih sistemih
ni bilo mogoče niti pomislite ali pa so prekomerno povečevale stroške npr. osredni zaslon
in/ali prikaz in nadzor objektov prek mobilne aplikacije z oddaljene lokacije. Poleg tega je
dostop do inštalacije KNX mogoč prek interneta, npr. za diagnostične namene.
Prednosti pametne inštalacije KNX pred klasično inštalacijo so:
• prihranek pri polaganju kabla,
• spremembe namembnosti elementov se izvajajo z delom na osebnem računalniku,
gradbena dela niso potrebna,
• krajši čas montaže,
• večja obsežnost namembnosti,
• zmanjšuje tveganje pred požarom zaradi manjšega obsega kablov,
• večja uporabnost in velika izbira opreme,
• uporabniku prijaznejša.
3.2 Mednarodni standard
Ob koncu leta 2003 je Evropski komite za standardizacijo v elektrotehniki (CENELEC)
odobril standard KNX kot evropski standard za stanovanjske in stavbne elektronske sisteme
kot del serije EN 50090. Standard KNX je prav tako oboril CEN (EN 13321-1 za medije in
protokole ter EN 13321-2 za KNXnet/IP). Ob koncu leta 2006 je bil standard KNX prav tako
odobren kot svetovni standard (ISO/IEC 14543-3-1 to 7). Še več, maja 2013 je bila

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
20
tehnologija KNX odobrena kot kitajski standard (GB/T 20965). KNX so prav tako odobrile
ZDA v obliki ANSI/ASHARE 135 [7].
3.3 Področja uporabe
Glavni izziv na področju avtomatizacije zgradb je, kako nadzirati čim več različnih zadev
naenkrat, končni cilj pa je popolna integracija sistema in naprav v nekem objektu, da bi bilo
vse pod nadzorom in sledljivo npr. prek osrednje enote in/ali pametnega telefona. Mogoče pa
je tudi povezovanje z drugimi avtomatizacijskimi sistemi, kot je sistem samodejnega
krmiljenja - BMS. [8]. Tebela 3.1 prikazuje možna področja uporabe sistema KNX.
Tabela 3.1 Možna področja uporabe sistema KNX
Razsvetljava Meritve Oddaljen nadzor Sistemi HVAC Upravljanje z
energijo
Nadzorni
sistemi Varnostni
sistemi Avdio/video
nadzor Žaluzije
in rolete Bela
tehnika
3.4 Komunikacijski mediji za prenos podatkov
KNX standard danes podpira več vrst medijev za prenos podatkov. Vsak komunikacijski
medij se lahko uporablja v kombinaciji z enim ali več načini konfiguracije. To omogoča lažje
oblikovanje in izbiro najboljše kombinacije na vseh področij uporabe.
TP-0 − sukana parica (angl. twisted pair):
• povzeta od BatiBUS,
• osnovni značilnosti sta prenos napajanja in podatkov po isti parici,
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
21
• hitrost prenosa: 2.400 bit/s,
• za preprečevanje trkov na vodilu uporablja CSMA/CA.
TP-1 − sukana parica:
• prevzeta od EIB,
• hitrost prenosa: 9.600 bit/s,
• napajanje: SELV 24 V, deluje brez napak pri napetostih med 21 in 30 V,
• topologija: zvezdna, linijska, drevesna ali mešana,
• tip prenosa: asinhronski, znakovno usmerjen in pol duplex dvosmerna komunikacija,
• mehanizem preprečevanja trkov: CSMA/CA
PL110 − električno omrežje (angl. Power line):
• medij: električno napajalno omrežje 230/400 V/50 Hz,
• hitrost prenosa: 1.200 bit/s,
• tip modulacije: S-FSK (angl. Spread frequency shift keying signaling),
• tip prenosa: asinhronski,
• tip komunikacije: poldupleksna, dvosmerna,
• nosilna frekvenca: 110 kHz (95−125 kHz),
• mehanizem preprečevanja trkov: CSMA.
PL132 − električno omrežje:
• prevzet od EHS,
• hitrost prenosa: 2.400 bit/s,
• mehanizem preprečevanja trkov: CSMA.
RF − radijski signal (angl. Radio Frequency):
• komunikacijski vmesnik, razvit v organizaciji KNX,
• medij: radijski signal,
• napajanje: baterijsko/zunanje napajanje,
• hitrost prenosa: 16.384 bit/s,
• zip modulacije: FSK (angl. Frequency shift keying),
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
22
• nosilna frekvenca: 868.300 MHz (širina prenosa 600 kHz),
• Telegrami se pošiljajo z maksimalno močjo sevanja 25 MW.
IR − infrardeče sevanje (angl. Infrared radiation):
• prevzeto od EIB,
• brezžična povezava.
IP (Ethernet) telegrami so pakirani v telegrame IP:
• standardi povezovanja: Ethernet (IEEE 802.3), WiFi/Wireless LAN (IEEE 802.11),
Bluetooth in FireWire (IEEE 1394). [7]
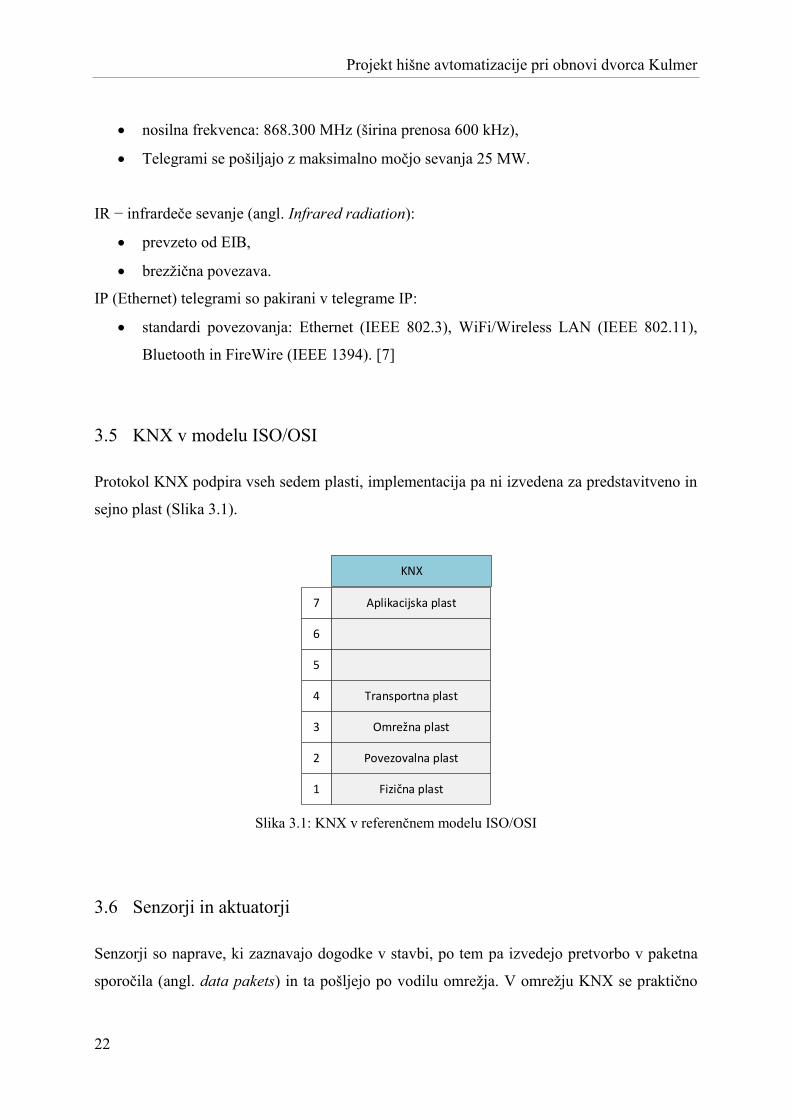
3.5 KNX v modelu ISO/OSI
Protokol KNX podpira vseh sedem plasti, implementacija pa ni izvedena za predstavitveno in
sejno plast (Slika 3.1).
Aplikacijska plast
Transportna plast
Omrežna plast
Povezovalna plast
Fizična plast
7
6
5
4
3
2
1
KNX
Slika 3.1: KNX v referenčnem modelu ISO/OSI
3.6 Senzorji in aktuatorji
Senzorji so naprave, ki zaznavajo dogodke v stavbi, po tem pa izvedejo pretvorbo v paketna
sporočila (angl. data pakets) in ta pošljejo po vodilu omrežja. V omrežju KNX se praktično

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
23
vse spremembe začnejo s poslanim sporočilom iz enega od senzorjev. To so lahko senzorji
temperature, tipke stikala, senzorji gibanja, senzorji osvetlitve, IR-senzorji in podobno. V eni
napravi je lahko integriranih več senzorjev. Zbirajo se glede na želeno uporabo.
Aktuatorji so izvršni elementi krmilnih sistemov, ki pretvarjajo električni signal v obliko,
primerno za upravljanje sistema. Sprejemajo podatke iz senzorjev in izvršujejo različne
naloge, na primer prižiganje luči, vklop ogrevanja ali hlajenja in podobno. Zbrani so glede na
zahtevano uporabo in vrsto vodila ali inštalacije in so proženi s pomočjo sporočil iz senzorjev.
Aktuatorji imajo na razpolago več funkcij, ki jih določamo s programiranjem [10]. Primeri so:
releji, zatemnilni aktuatorji, električni ventili in podobno.
3.7 Topologija KNX TP-1
Instalacija TP-1 je danes najbolj razširjeni komunikacijski medij za prenos podatkov v
inštalacijah KNX in se kot takšna uporablja v inštalacijah v dvorcu Kulmer. Slika 3.2
prikazuje maksimalno topologijo takšne mreže.
BC
LC
DVC 1
DVC 63
LR LR LR
DVC 65
DVC 127
DVC 129x.x.129
DVC 191x.x.191
DVC 193
DVC 255
DVC 1 DVC 48 BC
LC
DVC 1
DVC 63
Glavna linija
Področna linija
Max.64 devices
3x Max.
64 devices
Sekundarna linija
X.0.0 15.0.0
X.X.0
X.X.1
X.X.63
X.X.64
X.X.65
X.X.127
X.X.193
X.X.255
X.X.192X.X.128
Slika 3.2: Maksimalna topologija in naslavljanje naprav

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
24
BC − področni sklopnik (angl. Backbone coupler)
LC − linijski sklopnik (angl. Line coupler)
LR − linijski repetitor (angl. Line Repeater)
DVC − naprava na vodilu (angl. bus Device)
Linija
Najmanjša instalacijska enota je linija (angl. Line) in vsaka podpira priklop do 64 naprav.
Vsaka linija se lahko paralelno razširi na največ tri linijske segmente s pomočjo linijskega
repetitorja. V praksi je dejansko število naprav na liniji odvisno od izbranega napajanja
električne energije in potrošnje naprav, priklopljenih na vodilo.
Področje
Na glavni liniji (angl. main line) je mogoče priključiti največ 15 linij z uporabo linijskih
spojnikov. Mogoč je tudi neposreden priklop do 64 naprav na glavno linijo. Pri tem se
največje število naprav na glavni liniji zmanjšuje za število uporabljenih linijskih
kontaktorjev.
Več področij
Področje se lahko razširi prek področne linije (angl. Backbone line). S področno linijo je
mogoče inštalacijo razširiti na največ 15 področij s pomočjo pripadajočih kontaktorjev. Na
področno linijo je mogoče priključiti tudi različne naprave, vendar je njihovo število prav tako
odvisno od števila izkoriščenih področnih kontaktorjev v inštalaciji. Z izkoriščenim
maksimumom 15 področij, lahko v inštalaciji povezano deluje več kot 58.000 naprav [12].
Vsak linijski segment, glavna linija in področna linija se morajo oskrbeti s primernim
napajanjem KNX z dušilko (angl. Power Supply, Choke; PS/Ch).
Področni kontaktor, linijski kontaktor in linijski repetitor so identične naprave. Naloge, ki jih
opravljajo, izhajajo iz njihovega položaja v topologijo, fizičnega naslova, definiranega v
skladu s tem in z zahtevami aplikacije. Področni in linijski kontaktorji so zadolženi za
pošiljanje telegrama področjem in linijam, linijski repetitor pa samo usmerja telegrame.

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
25
Razporeditev na linije in področja ima pomembne koristi:
• povečanje operativne zanesljivosti glede na to, da so linije in področja oskrbljeni z
lastnim napajanjem – električno so izolirani, preostanek sistema nadaljuje z delom v
primeru napak na eni od linij;
• lokalni pretok informacij linije ali področja ne vpliva na pretok informacij na drugih
linijah in področjih;
• jasen pregled inštalacije KNX z namenom dela, diagnostike in vzdrževanje.
3.8 Tipi kablov vodila in povezovanje
YCYM 2 x 2 x 0,8:
• uporabljamo za polaganje v notranjih suhih in vlažnih prostorih podometno,
nadometno, v cevi ali za zunanje polaganje ob zaščiti pred sončnim sevanjem,
• zunanji: potrebna je zaščita pred neposredno sončno svetlobo,
• preizkusna napetost: 4 kV po navedbah EN 50090.
J-Y (St) Y 2 x 2 x 0,8:
• uporabljamo samo za notranje inštalacije v ceveh pod ometom ali nad ometom,
• zunanji: podometno,
• preizkusna napetost: 2,5 kV po navedbah EN
50090.
Kabel se priključi na naslednji način:
• parica: rumena/bela (+/−) rezerva ali se uporabi
za napajanje porabnika SELV,
• parica: črna/rdeča (+/−), uporablja se za prenos
telegramov,
• zaščitni ovoj se ne priključuje.
Upornost vodnika sme znašati 72 Ω/km in kapacitivnost zanke 100 nF/km. Prek vodila se
poleg prenosa informacij izvaja tudi napajanje elementov na vodilu. Vodila se lahko med
elementi polagajo zankasto ali kot odcep. Položeno je lahko paralelno z energetskimi

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
26
instalacijami, celo v skupni cevi. Dolžina celotnega vodila je lahko do 1.000 m, vključno z
vsemi odcepi. Največja razdalja med dvema napravama je lahko 700 m, razdalja med
napajalniki največ 200 m, razdalja od napajalnika do naprave pa je lahko največ 350 m.
Mreža KNX se napaja z varnostnim malim naponom (angl. Safety Extra Low Voltage –
SELV) do največ 30 V. Vodilo je izolirano od električnega/energetskega sistema. Enota za
napajanje z električno energijo izpolnjuje zahteve standarda DIN EN 50090 in ima omejeno
elektriko ter je odporna na kratki stik. Dobavljena je večinoma z vgrajeno dušilko [2].
3.9 Tehnologija prenosa podatkov
Informacije, ukazi in druga signalizacija se izmenjujejo med posameznimi bus elementi prek
telegrama, ki se prenaša simetrično s kablom vodila. Naprava na vodilu zaznava razliko v
naponu med dvema žilama kabla. V primeru kakršnihkoli motenj te vplivajo na obe žili kabla
istočasno in s tem ne vplivajo na razliko v naponu, tj. koristen signal. Hitrost prenosa je
9.600 bit/s, povprečni čas pošiljanja potrjenega telegrama pa je približno 25 ms.
Izmenjava informacij med bus napravami se vodi dogodkovno (angl. Event-controlled) in
posamezni deli informacij se prenašajo serijsko v sekvencah. Zaradi tega se v enem trenutku
na liniji nahaja samo en del informacije.
Če je dva ali več telegramov poslanih istočasno, lahko pride do trka, zato se za večjo
zanesljivost pri prenosu telegrama in pristop k vodilu uporablja distribuirani proces pristopa k
vodilu za preprečevanje trkov (CSMA/CA). Distribuirani proces pristopa zagotavlja, da se
nobena informacija ne izgubi in se vodilo optimalno izkoristi. Zaradi dodatnega mehanizma
prioritete vsebine telegrama je mogoče informaciji določiti tudi prioriteto. Vrste prioritet so
prikazane v Tabeli 3.2.
Tabela 3.2 Prioritete pri prenosu podatkov
00 Prioriteta 1 Sistemske funkcije
10 Prioriteta 2 Alarmne funkcije
01 Prioriteta 3 Normalen način, visoka prioriteta
11 Prioriteta 4 Normalen način, nizka prioriteta
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
27
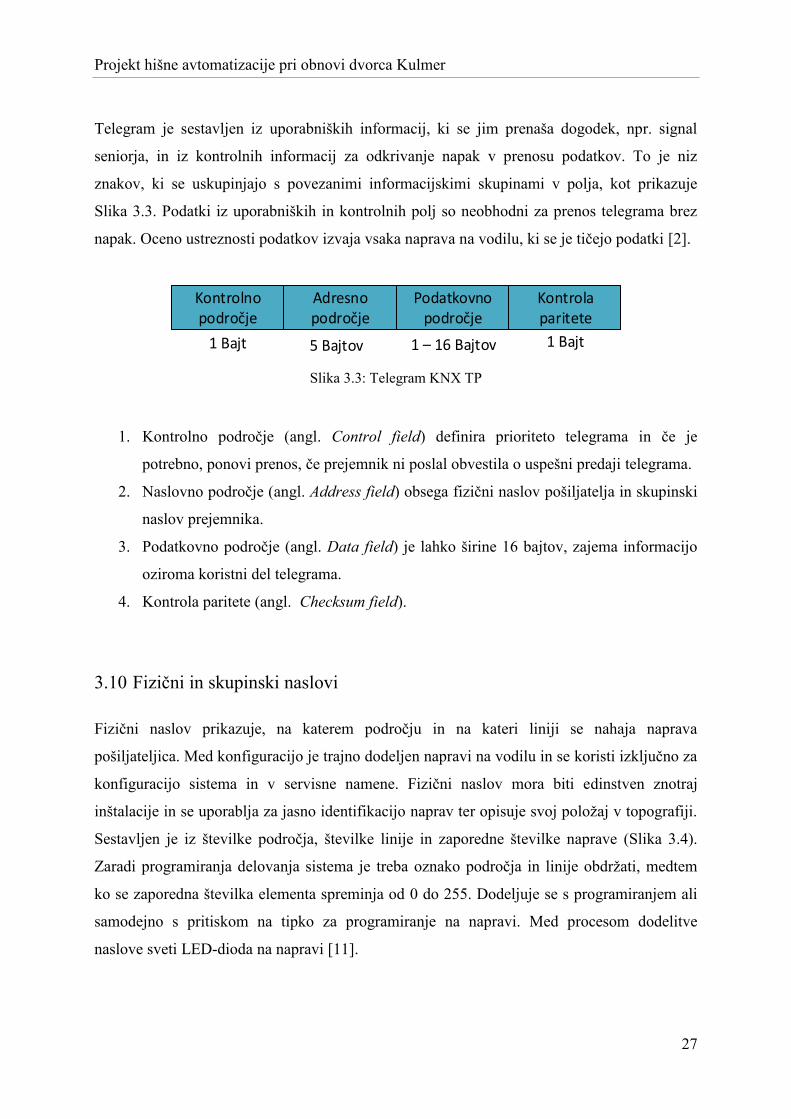
Telegram je sestavljen iz uporabniških informacij, ki se jim prenaša dogodek, npr. signal
seniorja, in iz kontrolnih informacij za odkrivanje napak v prenosu podatkov. To je niz
znakov, ki se uskupinjajo s povezanimi informacijskimi skupinami v polja, kot prikazuje
Slika 3.3. Podatki iz uporabniških in kontrolnih polj so neobhodni za prenos telegrama brez
napak. Oceno ustreznosti podatkov izvaja vsaka naprava na vodilu, ki se je tičejo podatki [2].
Kontrolno področje
Adresno področje
Podatkovno področje
Kontrola paritete
1 Bajt 5 Bajtov 1 – 16 Bajtov 1 Bajt
Slika 3.3: Telegram KNX TP
1. Kontrolno področje (angl. Control field) definira prioriteto telegrama in če je
potrebno, ponovi prenos, če prejemnik ni poslal obvestila o uspešni predaji telegrama.
2. Naslovno področje (angl. Address field) obsega fizični naslov pošiljatelja in skupinski
naslov prejemnika.
3. Podatkovno področje (angl. Data field) je lahko širine 16 bajtov, zajema informacijo
oziroma koristni del telegrama.
4. Kontrola paritete (angl. Checksum field).
3.10 Fizični in skupinski naslovi
Fizični naslov prikazuje, na katerem področju in na kateri liniji se nahaja naprava
pošiljateljica. Med konfiguracijo je trajno dodeljen napravi na vodilu in se koristi izključno za
konfiguracijo sistema in v servisne namene. Fizični naslov mora biti edinstven znotraj
inštalacije in se uporablja za jasno identifikacijo naprav ter opisuje svoj položaj v topografiji.
Sestavljen je iz številke področja, številke linije in zaporedne številke naprave (Slika 3.4).
Zaradi programiranja delovanja sistema je treba oznako področja in linije obdržati, medtem
ko se zaporedna številka elementa spreminja od 0 do 255. Dodeljuje se s programiranjem ali
samodejno s pritiskom na tipko za programiranje na napravi. Med procesom dodelitve
naslove sveti LED-dioda na napravi [11].
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
28
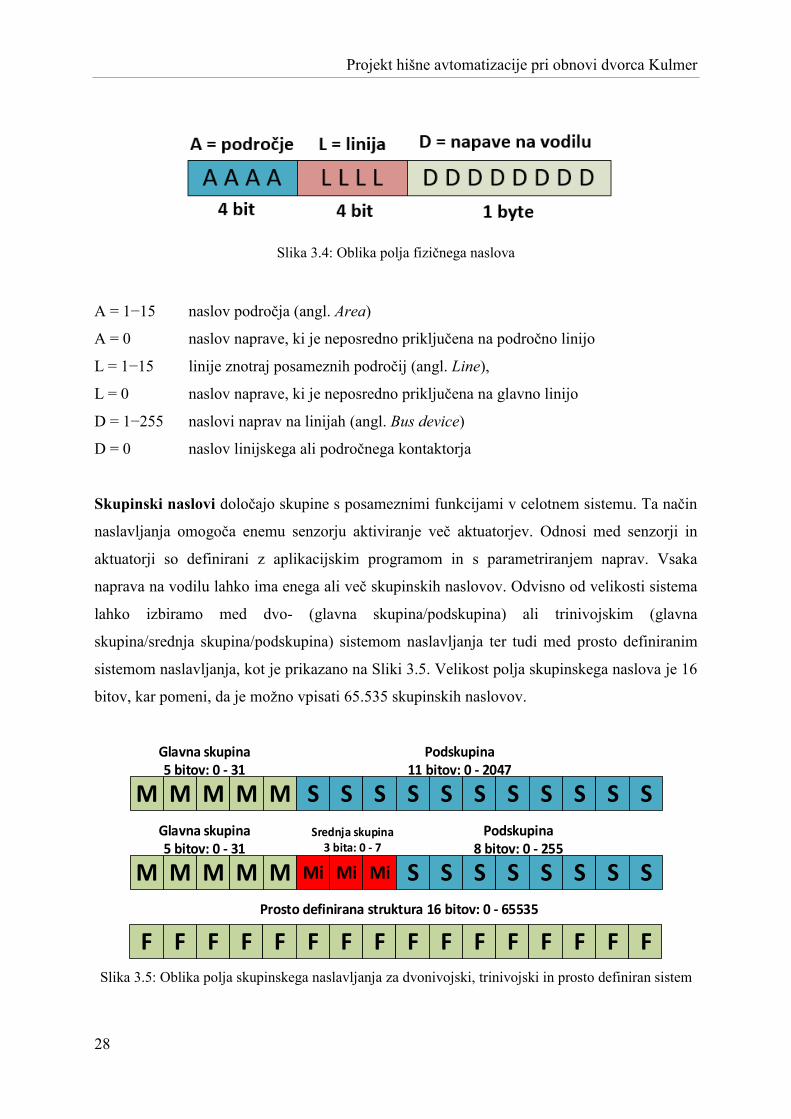
Slika 3.4: Oblika polja fizičnega naslova
A = 1−15 naslov področja (angl. Area)
A = 0 naslov naprave, ki je neposredno priključena na področno linijo
L = 1−15 linije znotraj posameznih področij (angl. Line),
L = 0 naslov naprave, ki je neposredno priključena na glavno linijo
D = 1−255 naslovi naprav na linijah (angl. Bus device)
D = 0 naslov linijskega ali področnega kontaktorja
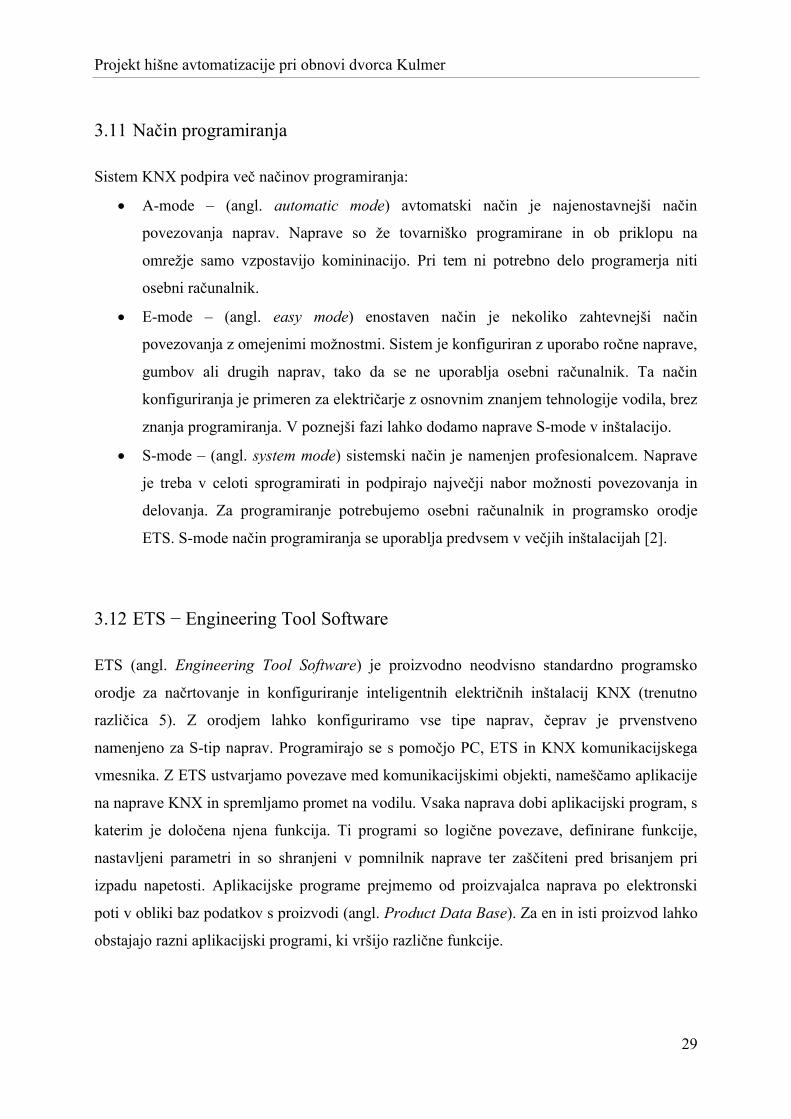
Skupinski naslovi določajo skupine s posameznimi funkcijami v celotnem sistemu. Ta način
naslavljanja omogoča enemu senzorju aktiviranje več aktuatorjev. Odnosi med senzorji in
aktuatorji so definirani z aplikacijskim programom in s parametriranjem naprav. Vsaka
naprava na vodilu lahko ima enega ali več skupinskih naslovov. Odvisno od velikosti sistema
lahko izbiramo med dvo- (glavna skupina/podskupina) ali trinivojskim (glavna
skupina/srednja skupina/podskupina) sistemom naslavljanja ter tudi med prosto definiranim
sistemom naslavljanja, kot je prikazano na Sliki 3.5. Velikost polja skupinskega naslova je 16
bitov, kar pomeni, da je možno vpisati 65.535 skupinskih naslovov.
M M M M M S S S S S S S S S S S
Glavna skupina 5 bitov: 0 - 31
Podskupina11 bitov: 0 - 2047
M M M M M Mi Mi Mi S S S S S S S S
Glavna skupina 5 bitov: 0 - 31
Podskupina8 bitov: 0 - 255
Srednja skupina3 bita: 0 - 7
F F F F F F F F F F F F F F F F
Prosto definirana struktura 16 bitov: 0 - 65535
Slika 3.5: Oblika polja skupinskega naslavljanja za dvonivojski, trinivojski in prosto definiran sistem
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
29
3.11 Način programiranja
Sistem KNX podpira več načinov programiranja:
• A-mode – (angl. automatic mode) avtomatski način je najenostavnejši način
povezovanja naprav. Naprave so že tovarniško programirane in ob priklopu na
omrežje samo vzpostavijo komininacijo. Pri tem ni potrebno delo programerja niti
osebni računalnik.
• E-mode – (angl. easy mode) enostaven način je nekoliko zahtevnejši način
povezovanja z omejenimi možnostmi. Sistem je konfiguriran z uporabo ročne naprave,
gumbov ali drugih naprav, tako da se ne uporablja osebni računalnik. Ta način
konfiguriranja je primeren za električarje z osnovnim znanjem tehnologije vodila, brez
znanja programiranja. V poznejši fazi lahko dodamo naprave S-mode v inštalacijo.
• S-mode – (angl. system mode) sistemski način je namenjen profesionalcem. Naprave
je treba v celoti sprogramirati in podpirajo največji nabor možnosti povezovanja in
delovanja. Za programiranje potrebujemo osebni računalnik in programsko orodje
ETS. S-mode način programiranja se uporablja predvsem v večjih inštalacijah [2].
3.12 ETS − Engineering Tool Software
ETS (angl. Engineering Tool Software) je proizvodno neodvisno standardno programsko
orodje za načrtovanje in konfiguriranje inteligentnih električnih inštalacij KNX (trenutno
različica 5). Z orodjem lahko konfiguriramo vse tipe naprav, čeprav je prvenstveno
namenjeno za S-tip naprav. Programirajo se s pomočjo PC, ETS in KNX komunikacijskega
vmesnika. Z ETS ustvarjamo povezave med komunikacijskimi objekti, nameščamo aplikacije
na naprave KNX in spremljamo promet na vodilu. Vsaka naprava dobi aplikacijski program, s
katerim je določena njena funkcija. Ti programi so logične povezave, definirane funkcije,
nastavljeni parametri in so shranjeni v pomnilnik naprave ter zaščiteni pred brisanjem pri
izpadu napetosti. Aplikacijske programe prejmemo od proizvajalca naprava po elektronski
poti v obliki baz podatkov s proizvodi (angl. Product Data Base). Za en in isti proizvod lahko
obstajajo razni aplikacijski programi, ki vršijo različne funkcije.
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
30
Uporaba orodja ETS:
• ETS teče na računalnikih z operacijskim sistemom Windows,
• jamstvo za največjo združljivost programske opreme s standardom ETS in KNX,
• združljivost ETS z informacijami o izdelkih in s projekti iz prejšnjih različic sistema
ETS,
• povsod v svetu vsi oblikovalci in inštalaterji uporabljajo isto orodje ETS za vsak
projekt KNX in za vsako certificirano napravo,
• zagotovljena je zanesljiva izmenjava podatkov.
ETS se osredotoča na vse uporabnike sistema KNX, od začetnikov do usposobljenih in
izkušenih partnerjev ali inštalaterjev KNX. Za doseganje optimalnih delovnih rezultatov za
vse uporabnike KNX ponuja več različic orodja ETS za različne ciljne skupine. Trenutno
obstajajo naslednje tri osnovne različice ETS5:
• ETS5 Demo za zelo majhne testne projekte,
• ETS5 Lite za majhne in srednje velike projekte,
• ETS5 Professional Za večje projekte z vsemi funkcijami.
Predpogoj za začetek programiranja sta zaključena energetska inštalacija in inštalacija KNX,
poleg tega pa mora biti mreža priključena na napajanje. Programiranje se lahko vrši v
vgrajenem in nevgrajenem stanju naprave.
3.13 Vzorčni primer načina dela in krmiljenja razsvetljave
Naslednji primer prikazuje načina delovanja sistema električnih inštalacij KNX. Prikazuje
način skupinskega naslavljanja in komunikacije ter pošiljanja telegrama posameznim
napravam na vodilu. Za to je zadolžen programer, ki na temelju projekta električnih inštalacij
KNX v programskem paketu ETS določa funkcije naprav. Slika 3.6 in Tabela 3.3 prikazujeta
naslavljanje in način dela inštalacij KNX.

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
31
P1
P2
S1
L11
L12
L13
L21
L22
L23
1/1/1
1/1/2
1/1/11
1/1/11/1/11
1/1/1
1/1/1
1/1/21/1/11
1/1/2
1/1/2
KNX
Slika 3.6: Primer povezave KNX
Tabela 3.3 Primer naslavljanja KNX
L11 L12 L13 L21 L22 L23
Skupinski naslovi
S1 1/1/11
1/1/11
P1 1/1/1 1/1/1 1/1/1
P2
1/1/2 1/1/2 1/1/2
P = stikalo; L = razsvetljava (svetlobna telesa); S = svetlobni senzor
S pritiskom na stikalo P1 se pošlje telegram z naslovom skupine 1/1/1. Telegram potuje skozi
mrežo in ga poslušajo vse naprave ali samo aktuatorji svetilk L11, L12, L13 s skupnim
naslovom 1/1/1 izvršujejo ukaz.
S pritiskom na tipko P2 se po mreži pošlje telegram 1/1/2. S tem telegramom so zajeti
aktuatorji svetlobnih teles L21, L22 in L23, vrši pa se ukaz v odvisnosti od aplikacijskega
programa. Če svetlobni senzor zazna določeno stopnjo svetlobe SI, pošlje skupinski naslov
1/1/11, pri čemer vse naprave na vodilu spremljajo telegram, vendar samo aktuatorji svetilke
L11 in L21 izvršujejo ukaz neodvisno od drugih naslovov.

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
32
3.14 Sheme inštalacije
Sheme prikazujejo, na kakšen način so posamezni deli elektroenergetske mreže, objekti,
skupine naprav ali naprave medsebojno povezani in v kakšnem funkcijskem odnosu so. V
prilogah A in B so predstavljene sheme električnih inštalacij.
V Prilogi A je shema povezovanja vseh elementov KNX v inštalaciji v dvorcu Kulmer.
Prikazuje v tloris objekta vrisano električno opremo in njeno povezanost. V Prilogi B sta
shema spajanja distribucije električne energije v hiši in enopolna shema povezovanja ene od
električnih omaric, vgrajenih v dvorec Kulmer. Prikazuje podroben prikaz vezja z jasno
razvidnim načinom delovanja.
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
33
4 SISTEM SAMODEJNEGA KRMILJENJA STAVBE (BMS)
Sistem samodejnega krmiljenja stavbe (angl. Building Management System – BMS) je
računalniški nadzorni upravljalni sistem, ki krmili in nadzoruje mehansko in električno
opremo stavbe, kot so oprema za prezračevanje in ogrevanje, razsvetljava, varnostni sistemi
itd. Zagotavlja, da stavba deluje na najvišji ravni učinkovitosti ter odpravlja izgube porabljene
energije in s tem povezane stroške. Optimalno raven porabe energije in učinkovitosti
dosežemo z neprekinjenim vzdrževanjem pravilnega ravnovesja med obratovalnimi
zahtevami, zunanjimi in notranjimi okoljskimi pogoji. Krmilni sistem temelji na uporabi
večjega števila mikroračunalnikov, pri čemer vsak od njih izvaja eno ali več upraviteljskih
nalog. Osnovna značilnost BMS je, da se s samostojnimi mikroprocesorskimi upraviteljskimi
postajami upravlja s posameznimi upraviteljskimi sistemi, lahko pa so tudi integrirane. To
pomeni, da se večina upraviteljskih odločitev lahko sprejme lokalno, medtem ko se
menedžment in optimizacija lahko izvajata kolektivno. S standardoma CEN TC247 in ISO
TC 205/WG3 se urejajo področja avtomatizacije, nadzora in upravljanja sistemov v
stanovanjskih in nestanovanjskih stavbah [13][14].
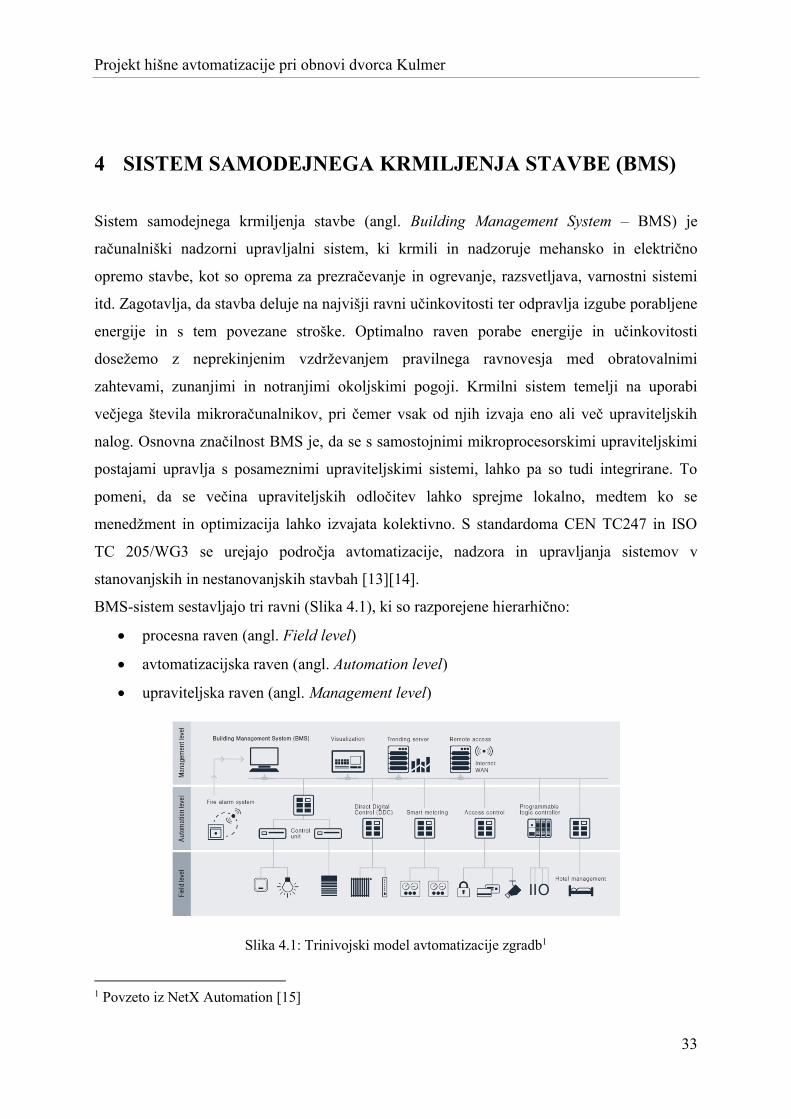
BMS-sistem sestavljajo tri ravni (Slika 4.1), ki so razporejene hierarhično:
• procesna raven (angl. Field level)
• avtomatizacijska raven (angl. Automation level)
• upraviteljska raven (angl. Management level)
Slika 4.1: Trinivojski model avtomatizacije zgradb1
1 Povzeto iz NetX Automation [15]

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
34
Procesna raven je najnižja in predstavlja fizični stik z okoljem oz. s procesom. Sestavljajo jo
senzorji, ki zbirajo podatke iz okolja ter jih potem pošiljajo na hierarhično višjo
avtomatizacijsko raven, s katere dobivajo ukaze aktuatorji in ustrezno prilagajajo razmere
okolju oziroma procesu vodenja. Senzorji in aktuatorji so s krmilniki in med sabo na
avtomatizacijski ravni povezani prek področnih vodil ali neposredno.
Avtomatizacijska raven poskrbi za obdelavo podatkov, ki jih dobi s procesne ravni, in
pošilja ukaze za potrebne akcije nazaj na procesno raven. Na tej ravni se nahajajo krmilniki,
ki izvajajo regulacijo in krmiljenje procesa, poleg tega pa se tukaj zbirajo in ustrezno
oblikujejo podatki za upraviteljsko raven.
Upraviteljska raven omogoča pregled nad celotnim sistemom in njegovo upravljanje. To
raven predstavlja nadzorna soba, kjer ima operater enoten spletni vmesnik do sistema, prek
katerega nanj ročno vpliva s spreminjanjem parametrov krmilnikom na avtomatizacijski ravni
oziroma neposredno z aktuatorji na procesni ravni. Na tej ravni se izvaja tudi zbiranje in
shranjevanje zgodovinskih podatkov, možna pa je tudi povezava z drugimi oz. oddaljenimi
sistemi.
V takšni hierarhiji se izvajata dva tipa komunikacije, horizontalna in vertikalna. Horizontalna
komunikacija poteka znotraj posamezne ravni, kot je na primer komunikacija med krmilniki
prek avtomatizacijske ravni. Vertikalna komunikacija pa poteka med posameznimi ravnmi.
Kjer se omrežja na posameznih ravneh po navadi razlikujejo, tj. uporabljajo različne
protokole za komunikacijo, je treba izvršiti pretvorbo protokola, za kar poskrbijo ustrezni
prehodi. S tem se zagotovi dvosmerna razmenjava podatkov in informacij med različnimi
sistemi [16].
4.1 Vgrajena oprema in sistem BMS v dvorcu Kulmer
BMS-sistem dvorca Kulmer služi za integracijo, zbiranje in obdelavo podatkov iz vgrajenih
električnih in mehanskih sistemov. S pomočjo vizualnega prikaza na osebnem računalniku sta
omogočena nadzor in upravljanje s celotnim sistemom iz osrednje sobe v objektu. Slika 4.2
prikazuje način integracije sistemov. Namen je prilagoditi sisteme, da komunicirajo v
skupnem komunikacijskem protokolu TCP/IP. Iz tega razloga je treba vgraditi različne
omrežne naprave in vmesnike.
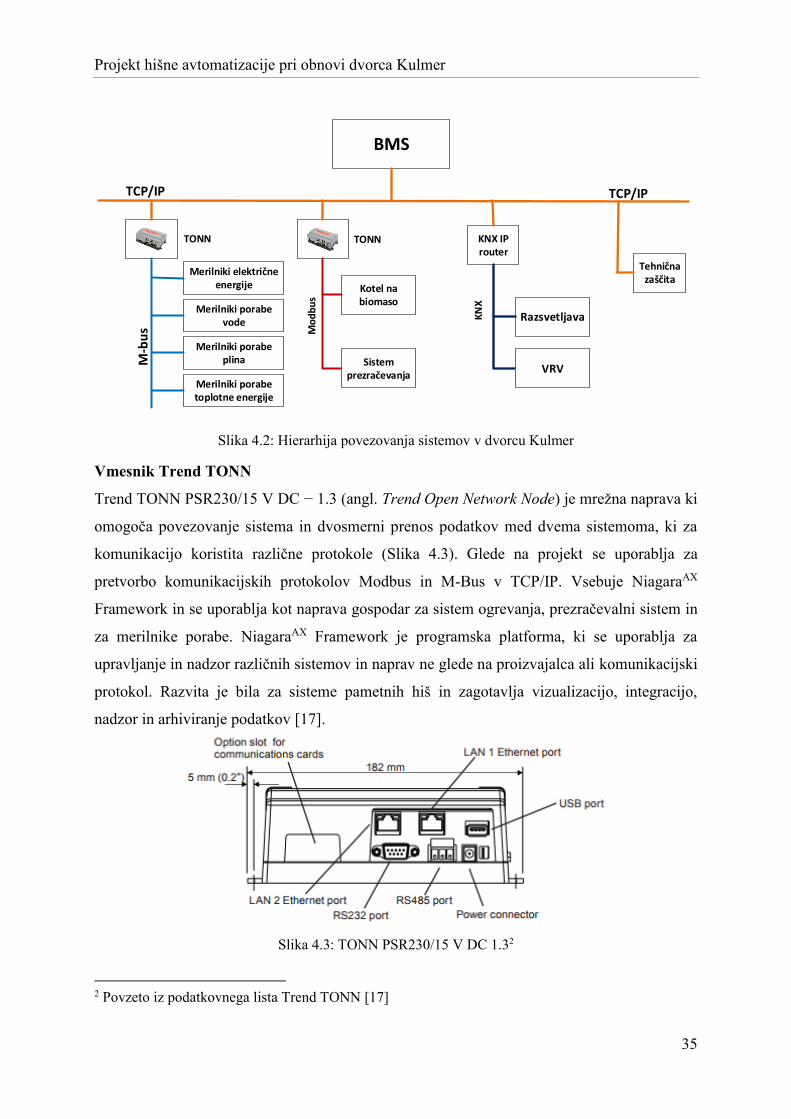
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
35
Kotel na biomaso
Merilniki električne energije
BMS
TCP/IPTCP/IP
Merilniki porabe vode
Merilniki porabe plina
Merilniki porabe toplotne energije
M-b
us M
od
bu
s
KNX IP router
RazsvetljavaKN
X
Tehnična zaščita
TONN TONN
VRVSistem
prezračevanja
Slika 4.2: Hierarhija povezovanja sistemov v dvorcu Kulmer
Vmesnik Trend TONN
Trend TONN PSR230/15 V DC − 1.3 (angl. Trend Open Network Node) je mrežna naprava ki
omogoča povezovanje sistema in dvosmerni prenos podatkov med dvema sistemoma, ki za
komunikacijo koristita različne protokole (Slika 4.3). Glede na projekt se uporablja za
pretvorbo komunikacijskih protokolov Modbus in M-Bus v TCP/IP. Vsebuje NiagaraAX
Framework in se uporablja kot naprava gospodar za sistem ogrevanja, prezračevalni sistem in
za merilnike porabe. NiagaraAX Framework je programska platforma, ki se uporablja za
upravljanje in nadzor različnih sistemov in naprav ne glede na proizvajalca ali komunikacijski
protokol. Razvita je bila za sisteme pametnih hiš in zagotavlja vizualizacijo, integracijo,
nadzor in arhiviranje podatkov [17].
Slika 4.3: TONN PSR230/15 V DC 1.32
2 Povzeto iz podatkovnega lista Trend TONN [17]

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
36
Naprava TONN vsebuje:
• 64 MB RAM/64 MB Flash spomina,
• 2 x 10/100 Mb Ethernet vrata,
• 1 x RS-485 serijska vrata,
• 1 x RS-232 serijska vrata,
• 2 reži za komunikacijske kartice.
Vključuje naslednje gonilnike za različne funkcije:
BACnet IP, BACnet MSTP, EIB/KNX IP, LONFTT, LON IP, ModbusRTU Master,
ModbusRTU Slave, ModbusTCP Master, ModbusTCP Slave, M-Bus Serial, M-Bus IP, oBIX,
in sisteme SNMP.
KNX IP-usmerjevalnik:
KNXnet/IP usmerjevalnik je vmesnik (angl. gateway) ki služi za povezovanje, pretvorbo
protokola in dvosmerni prenos telegrama med mrežo KNX TP in sistemom BMS z uporabo
omrežja TCP/IP (Slika 4.4). Napajanje vmesnika poteka prek vodila KNX [18]. Po
zaključenem programiranju inštalacije KNX v orodju ETS se celotni aplikacijski program
enostavno uvozi v sistem BMS. S tem je omogočen dostop do vseh funkcij mreže KNX, v
sistemu BMS pa se izvede spletna vizualna predstava sistema.
Slika 4.4: KNX IP-usmerjevalnik3
3 Povzeto iz podatkovnega lista GIRA IP Router 1030 00
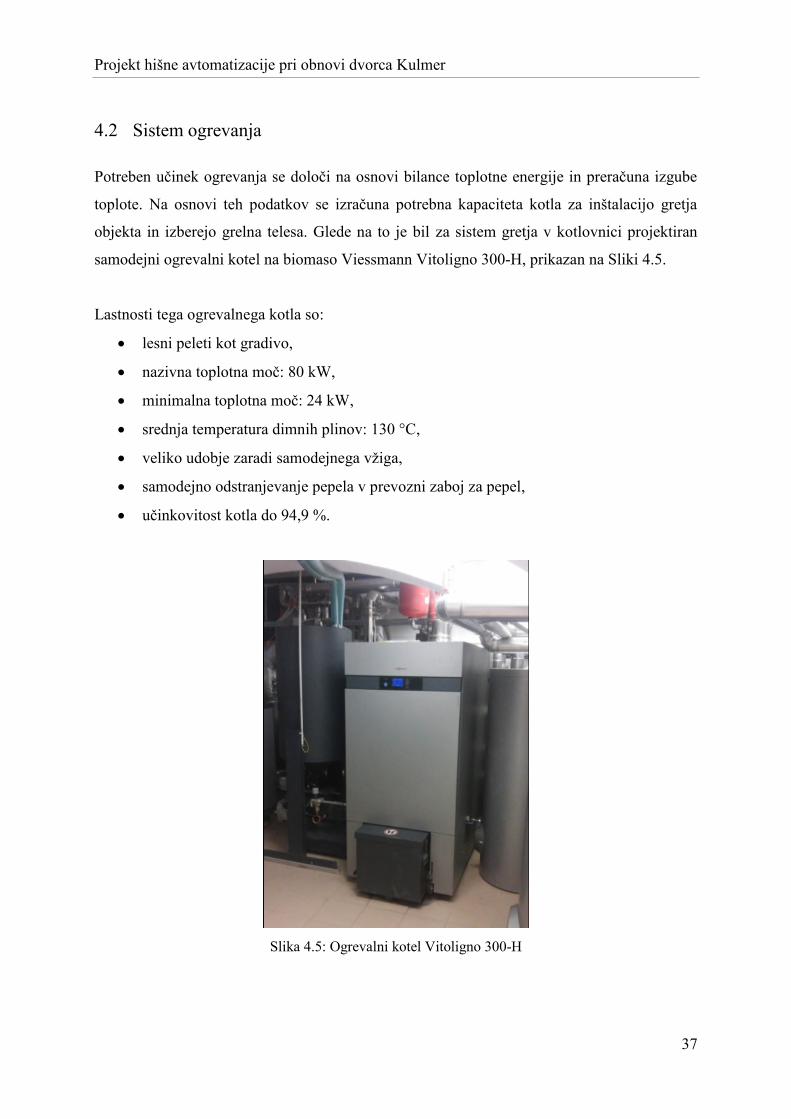
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
37
4.2 Sistem ogrevanja
Potreben učinek ogrevanja se določi na osnovi bilance toplotne energije in preračuna izgube
toplote. Na osnovi teh podatkov se izračuna potrebna kapaciteta kotla za inštalacijo gretja
objekta in izberejo grelna telesa. Glede na to je bil za sistem gretja v kotlovnici projektiran
samodejni ogrevalni kotel na biomaso Viessmann Vitoligno 300-H, prikazan na Sliki 4.5.
Lastnosti tega ogrevalnega kotla so:
• lesni peleti kot gradivo,
• nazivna toplotna moč: 80 kW,
• minimalna toplotna moč: 24 kW,
• srednja temperatura dimnih plinov: 130 °C,
• veliko udobje zaradi samodejnega vžiga,
• samodejno odstranjevanje pepela v prevozni zaboj za pepel,
• učinkovitost kotla do 94,9 %.
Slika 4.5: Ogrevalni kotel Vitoligno 300-H
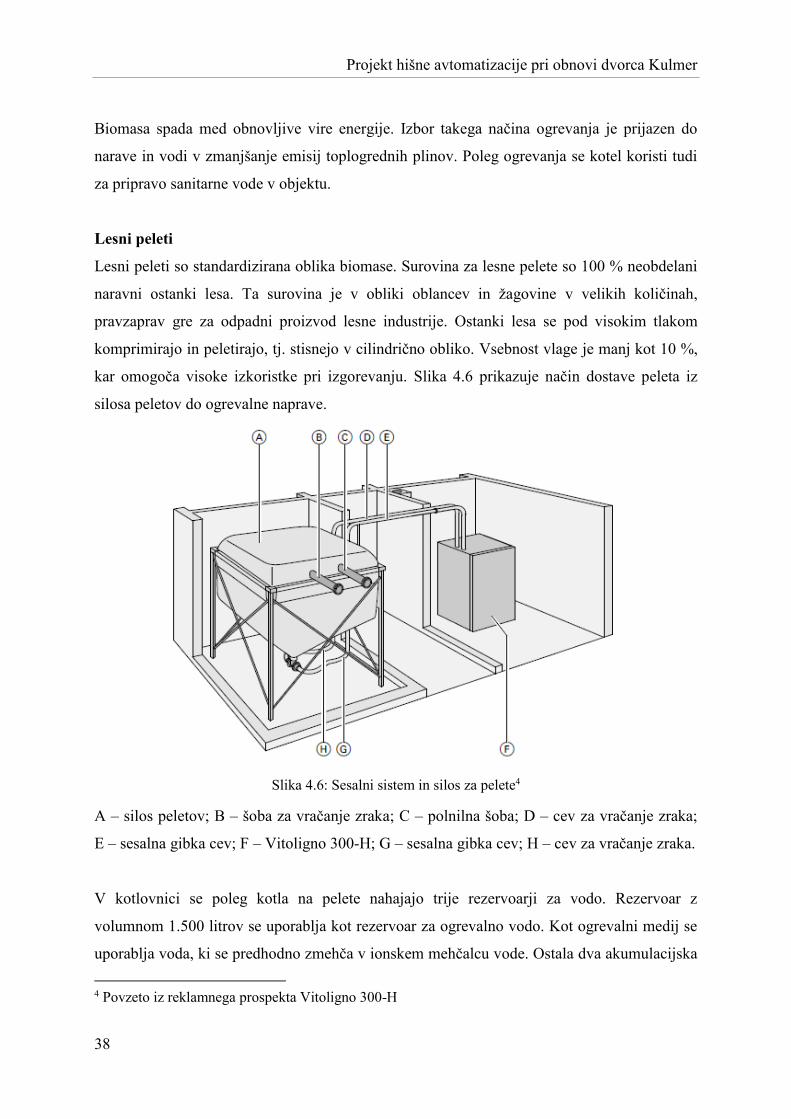
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
38
Biomasa spada med obnovljive vire energije. Izbor takega načina ogrevanja je prijazen do
narave in vodi v zmanjšanje emisij toplogrednih plinov. Poleg ogrevanja se kotel koristi tudi
za pripravo sanitarne vode v objektu.
Lesni peleti
Lesni peleti so standardizirana oblika biomase. Surovina za lesne pelete so 100 % neobdelani
naravni ostanki lesa. Ta surovina je v obliki oblancev in žagovine v velikih količinah,
pravzaprav gre za odpadni proizvod lesne industrije. Ostanki lesa se pod visokim tlakom
komprimirajo in peletirajo, tj. stisnejo v cilindrično obliko. Vsebnost vlage je manj kot 10 %,
kar omogoča visoke izkoristke pri izgorevanju. Slika 4.6 prikazuje način dostave peleta iz
silosa peletov do ogrevalne naprave.
Slika 4.6: Sesalni sistem in silos za pelete4
A – silos peletov; B – šoba za vračanje zraka; C – polnilna šoba; D – cev za vračanje zraka;
E – sesalna gibka cev; F – Vitoligno 300-H; G – sesalna gibka cev; H – cev za vračanje zraka.
V kotlovnici se poleg kotla na pelete nahajajo trije rezervoarji za vodo. Rezervoar z
volumnom 1.500 litrov se uporablja kot rezervoar za ogrevalno vodo. Kot ogrevalni medij se
uporablja voda, ki se predhodno zmehča v ionskem mehčalcu vode. Ostala dva akumulacijska
4 Povzeto iz reklamnega prospekta Vitoligno 300-H
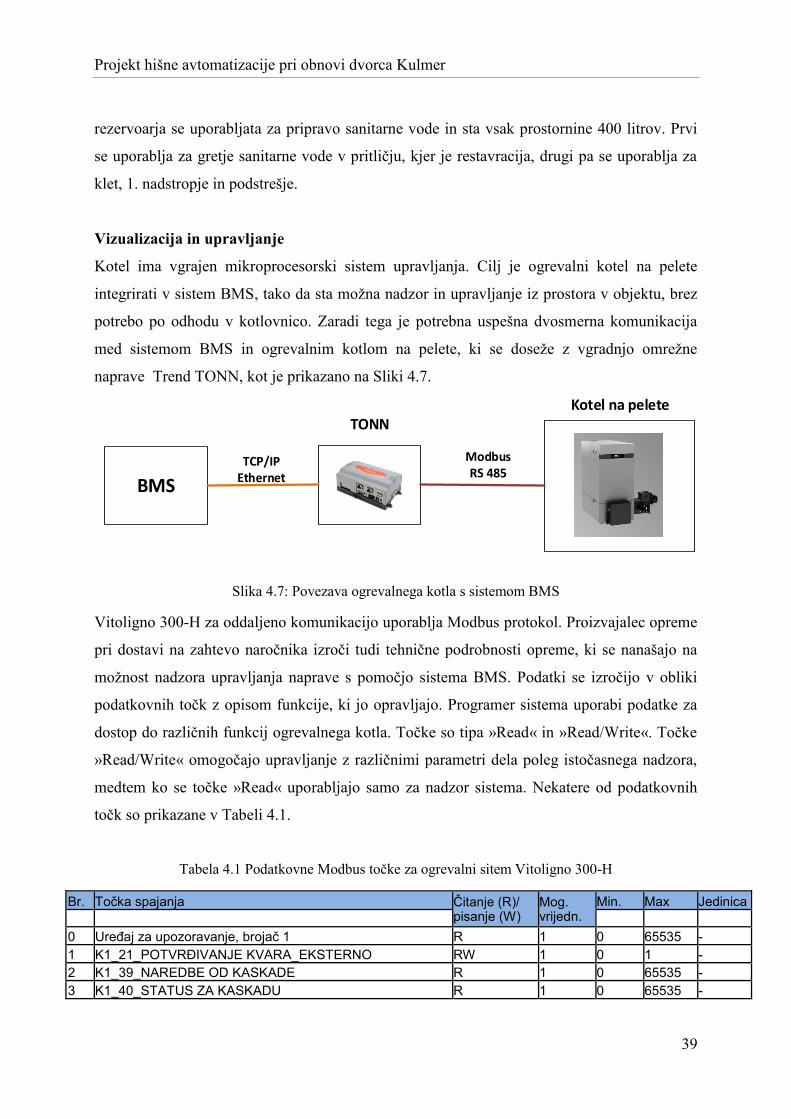
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
39
rezervoarja se uporabljata za pripravo sanitarne vode in sta vsak prostornine 400 litrov. Prvi
se uporablja za gretje sanitarne vode v pritličju, kjer je restavracija, drugi pa se uporablja za
klet, 1. nadstropje in podstrešje.
Vizualizacija in upravljanje
Kotel ima vgrajen mikroprocesorski sistem upravljanja. Cilj je ogrevalni kotel na pelete
integrirati v sistem BMS, tako da sta možna nadzor in upravljanje iz prostora v objektu, brez
potrebo po odhodu v kotlovnico. Zaradi tega je potrebna uspešna dvosmerna komunikacija
med sistemom BMS in ogrevalnim kotlom na pelete, ki se doseže z vgradnjo omrežne
naprave Trend TONN, kot je prikazano na Sliki 4.7.
BMS
Modbus RS 485
TCP/IPEthernet
TONNKotel na pelete
Slika 4.7: Povezava ogrevalnega kotla s sistemom BMS
Vitoligno 300-H za oddaljeno komunikacijo uporablja Modbus protokol. Proizvajalec opreme
pri dostavi na zahtevo naročnika izroči tudi tehnične podrobnosti opreme, ki se nanašajo na
možnost nadzora upravljanja naprave s pomočjo sistema BMS. Podatki se izročijo v obliki
podatkovnih točk z opisom funkcije, ki jo opravljajo. Programer sistema uporabi podatke za
dostop do različnih funkcij ogrevalnega kotla. Točke so tipa »Read« in »Read/Write«. Točke
»Read/Write« omogočajo upravljanje z različnimi parametri dela poleg istočasnega nadzora,
medtem ko se točke »Read« uporabljajo samo za nadzor sistema. Nekatere od podatkovnih
točk so prikazane v Tabeli 4.1.
Tabela 4.1 Podatkovne Modbus točke za ogrevalni sitem Vitoligno 300-H
Br. Točka spajanja Čitanje (R)/ pisanje (W)
Mog. vrijedn.
Min. Max Jedinica
0 Uređaj za upozoravanje, brojač 1 R 1 0 65535 -
1 K1_21_POTVRĐIVANJE KVARA_EKSTERNO RW 1 0 1 -
2 K1_39_NAREDBE OD KASKADE R 1 0 65535 -
3 K1_40_STATUS ZA KASKADU R 1 0 65535 -
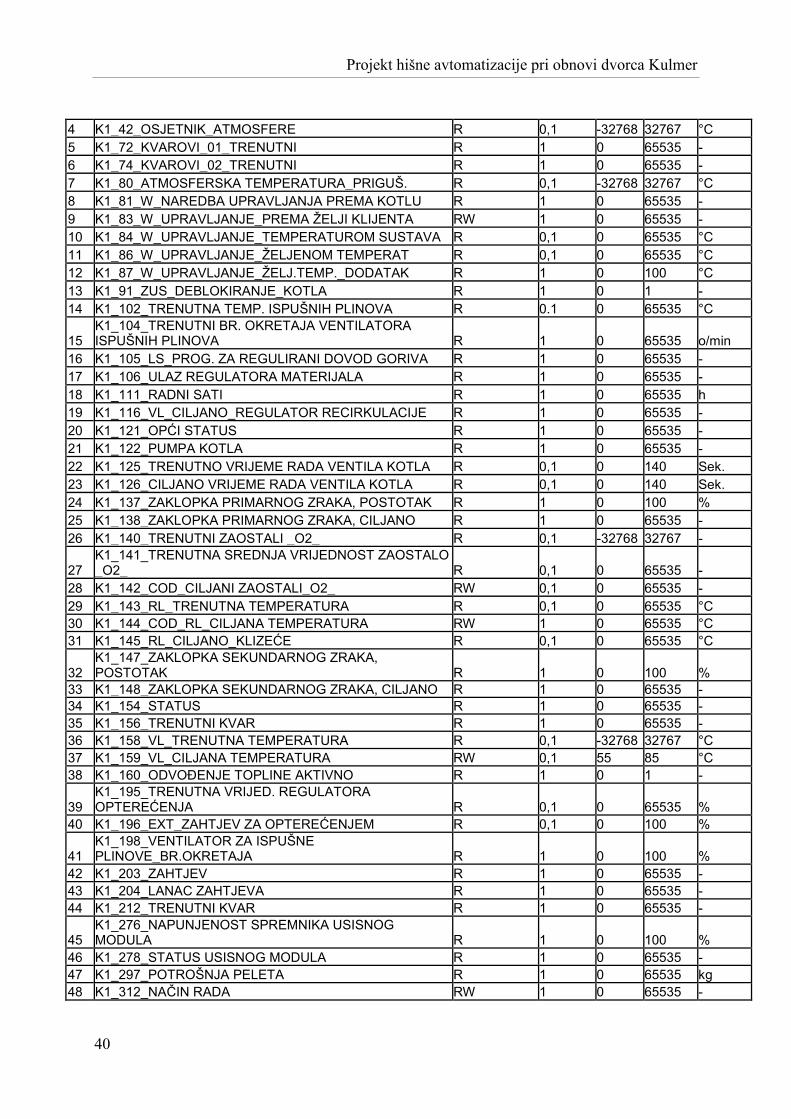
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
40
4 K1_42_OSJETNIK_ATMOSFERE R 0,1 -32768 32767 °C
5 K1_72_KVAROVI_01_TRENUTNI R 1 0 65535 -
6 K1_74_KVAROVI_02_TRENUTNI R 1 0 65535 -
7 K1_80_ATMOSFERSKA TEMPERATURA_PRIGUŠ. R 0,1 -32768 32767 °C
8 K1_81_W_NAREDBA UPRAVLJANJA PREMA KOTLU R 1 0 65535 -
9 K1_83_W_UPRAVLJANJE_PREMA ŽELJI KLIJENTA RW 1 0 65535 -
10 K1_84_W_UPRAVLJANJE_TEMPERATUROM SUSTAVA R 0,1 0 65535 °C
11 K1_86_W_UPRAVLJANJE_ŽELJENOM TEMPERAT R 0,1 0 65535 °C
12 K1_87_W_UPRAVLJANJE_ŽELJ.TEMP._DODATAK R 1 0 100 °C
13 K1_91_ZUS_DEBLOKIRANJE_KOTLA R 1 0 1 -
14 K1_102_TRENUTNA TEMP. ISPUŠNIH PLINOVA R 0.1 0 65535 °C
15 K1_104_TRENUTNI BR. OKRETAJA VENTILATORA ISPUŠNIH PLINOVA R 1 0 65535 o/min
16 K1_105_LS_PROG. ZA REGULIRANI DOVOD GORIVA R 1 0 65535 -
17 K1_106_ULAZ REGULATORA MATERIJALA R 1 0 65535 -
18 K1_111_RADNI SATI R 1 0 65535 h
19 K1_116_VL_CILJANO_REGULATOR RECIRKULACIJE R 1 0 65535 -
20 K1_121_OPĆI STATUS R 1 0 65535 -
21 K1_122_PUMPA KOTLA R 1 0 65535 -
22 K1_125_TRENUTNO VRIJEME RADA VENTILA KOTLA R 0,1 0 140 Sek.
23 K1_126_CILJANO VRIJEME RADA VENTILA KOTLA R 0,1 0 140 Sek.
24 K1_137_ZAKLOPKA PRIMARNOG ZRAKA, POSTOTAK R 1 0 100 %
25 K1_138_ZAKLOPKA PRIMARNOG ZRAKA, CILJANO R 1 0 65535 -
26 K1_140_TRENUTNI ZAOSTALI _O2_ R 0,1 -32768 32767 -
27 K1_141_TRENUTNA SREDNJA VRIJEDNOST ZAOSTALO _O2_ R 0,1 0 65535 -
28 K1_142_COD_CILJANI ZAOSTALI_O2_ RW 0,1 0 65535 -
29 K1_143_RL_TRENUTNA TEMPERATURA R 0,1 0 65535 °C
30 K1_144_COD_RL_CILJANA TEMPERATURA RW 1 0 65535 °C
31 K1_145_RL_CILJANO_KLIZEĆE R 0,1 0 65535 °C
32 K1_147_ZAKLOPKA SEKUNDARNOG ZRAKA, POSTOTAK R 1 0 100 %
33 K1_148_ZAKLOPKA SEKUNDARNOG ZRAKA, CILJANO R 1 0 65535 -
34 K1_154_STATUS R 1 0 65535 -
35 K1_156_TRENUTNI KVAR R 1 0 65535 -
36 K1_158_VL_TRENUTNA TEMPERATURA R 0,1 -32768 32767 °C
37 K1_159_VL_CILJANA TEMPERATURA RW 0,1 55 85 °C
38 K1_160_ODVOĐENJE TOPLINE AKTIVNO R 1 0 1 -
39 K1_195_TRENUTNA VRIJED. REGULATORA OPTEREĆENJA R 0,1 0 65535 %
40 K1_196_EXT_ZAHTJEV ZA OPTEREĆENJEM R 0,1 0 100 %
41 K1_198_VENTILATOR ZA ISPUŠNE PLINOVE_BR.OKRETAJA R 1 0 100 %
42 K1_203_ZAHTJEV R 1 0 65535 -
43 K1_204_LANAC ZAHTJEVA R 1 0 65535 -
44 K1_212_TRENUTNI KVAR R 1 0 65535 -
45 K1_276_NAPUNJENOST SPREMNIKA USISNOG MODULA R 1 0 100 %
46 K1_278_STATUS USISNOG MODULA R 1 0 65535 -
47 K1_297_POTROŠNJA PELETA R 1 0 65535 kg
48 K1_312_NAČIN RADA RW 1 0 65535 -

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
41
49 K1_351_CILJANA TEMPERATURA R 0,1 0 65535 °C
50 K1_363_STANJE PUNJENJA R 1 0 65535 %
51 K1_365_TRENUTNO VRIJEME RADA PRIGUŠNOG VENTILA R 0,1 0 65535 Sek.
52 K1_366_CILJANO VRIJEME RADA PRIGUŠNOG VENTILA R 0,1 0 65535 Sek.
53 K1_370_TRENUT. STANJE SENZORA SPREMNIKA _1_ R 0,1 -32768 32767 °C
54 K1_371_ TRENUT. STANJE SENZORA SPREMNIKA _2_ R 0,1 -32768 32767 °C
55 K1_372_ TRENUT. STANJE SENZORA SPREMNIKA _3_ R 0,1 -32768 32767 °C
56 K1_373_ TRENUT. STANJE SENZORA SPREMNIKA _4_ R 0,1 -32768 32767 °C
57 K1_374_ TRENUT. STANJE SENZORA SPREMNIKA _5_ R 0,1 -32768 32767 °C
58 K1_375_SENZOR SPREMNIKA_SRED.VRIJED._TRENUTNA R 0,1 -32768 32767 °C
59 K1_381_STANJE NAPUNJ._SPREMNIKA ZA UKL.PEPELA R 0,1 0 100 %
60 K1_383_TRENUTNI KVAR R 1 0 65535 -
61 K1_390_TRENUTNI KVAR KOTLA R 1 0 65535 -
62 K1_HZG_1_11_PROGRAM RADA RW 1 0 65535 -
63 K1_HZG_1_16_PUMPA KRUGA GRIJANJA R 1 0 65535 -
64 K1_HZG_1_17_INTERNI STATUS R 1 0 65535 -
65 K1_HZG_1_18_NAGIB RW 0,1 0,2 3,5 -
66 K1_HZG_1_19_RAZINA RW 0,1 -13 40 -
67 K1_HZG_1_72_TRENUTNA TEMP. PROSTORA R 0,1 -32768 32767 °C
68 K1_HZG_1_73_CILJANA TEMP. PROSTORA RW 0,1 -32768 32767 °C
69 K1_HZG_1_74_SMANJENA TEMP. PROSTORA RW 0,1 -32768 32767 °C
70 K1_HZG_1_79_TRENUTNO VRIJEME RADA VENTILA R 0,1 0 65535 Sek.
71 K1_HZG_1_81_VL_TRENUTNI R 0,1 -32768 32767 °C
72 K1_HZG_1_82_VL_CILJANI R 0,1 -32768 32767 °C
73 K1_HZG_1_83_TRENUTNI KVAR R 1 0 65535 -
74 K1_HZG_2_11_PROGRAM RADA RW 1 0 65535 -
75 K1_HZG_2_16_PUMPA KRUGA GRIJANJA R 1 0 65535 -
76 K1_HZG_2_17_INTERNI STATUS R 1 0 65535 -
77 K1_HZG_2_18_NAGIB RW 0,1 0,2 3,5 -
78 K1_HZG_2_19_RAZINA RW 0,1 -13 40 -
79 K1_HZG_2_72_TRENUTNA TEMP. PROSTORA R 0,1 -32768 32767 °C
80 K1_HZG_2_73_CILJANA TEMP. PROSTORA RW 0,1 -32768 32767 °C
Upravljanje in nadzor sistema sta prikazana na Sliki 4.8. Izvajalec del oziroma programer
sistema je na zahtevo vlagateljev omogočil naslednje funkcije za upravljanje in nadzor
ogrevalnega sistema prek sistema BMS:
Kotel:
• ukaz vklop/izklop, ki služi za vklop in izklop ogrevalnega kotla po potrebi. Ukazu je
dodan splošni status z vizualnim indikatorjem dela;
• status okvare z vizualnim indikatorjem sporoča morebitno napako ogrevalne naprave;
• status peleta z vizualnim indikatorjem podaja informacijo o porabi pelet oziroma
sporoča, da je treba napolniti silos;
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
42
• status temperature v ceveh ogrevalnega kotla;
• statusi so obenem tudi sporočila o napakah, ki se pošljejo na e-poštni naslov.
Črpalke in rezervoarji za vodo:
• upravljanje vklopa in izklopa črpale s statusom količine pretoka;
• upravljanje z želeno vrednostjo temperature rezervoarja s sanitarno vodo;
• omogočeno je časovno upravljanje s cirkulacijskimi črpalkami s pomočjo koledarja
glede na uro, dan v tednu in mesecu;
• statusi temperature v vsakem od rezervoarjev prikazujejo informacije o trenutnih
temperaturah vode v sistemu gretja in sistemu s sanitarno vodo.
Možnosti za izboljšave
Glede na tehnične podatke proizvajalca ogrevalna naprava omogoča veliko več možnosti
upravljanja in nadzora. Z integracijo in vizualiziranjem večjega števila funkcij, tj.
podatkovnih točk v sistem BMS, bi zagotovili celovitejše upravljanje z ogrevalno napravo z
osrednje lokacije v objektu. Nekatere od možnosti, ki jih nudi sistem in se lahko prav tako
integrirajo in posledično vizualizirajo, so:
• obratovalno stanje z regulacijo nazivne izhodne moči,
• upravljanje z želeno temperaturo rezervoarja ogrevalne vode,
• statusi različnih temperatur v času dela iz integriranih temperaturnih senzorjem
dimnih plinov, temperature kotla, vrnjenih voda, zunanje temperature itd.,
• natančna temperaturna razslojitev v rezervoarjo ogrevalne vode,
• upravljanje pretoka cirkulacijskih črpalk.
Upravljanje in nadzor naštetih funkcij sistema ogrevanja bi pomagalo v celoti optimizirati
sistem ogrevanja, da bi deloval na najbolj optimalni način glede na trenutne potrebe. Preostalo
upravljanje in nadzor se za zdaj opravljata prek integriranega zaslona kotla s fizičnim
odhodom v prostore strojnice.

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
43
Slika 4.8: Prikaz kotlovnice v sistemu BMS

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
44
4.3 Prezračevalni sistem
Prezračevalni sistem služi za izmenjavo zraka v prostoru. Skladno s projektom se vgrajujeta
dva ločena sistema proizvajalca Pro-klima za dve ločeni celoti v dvorcu. To je izvedeno s
pomočjo sistema zračne komore, kjer priprava zraka poteka v osrednih enotah, nato pa se zrak
distribuira v prostore (Slika 4.9).
Slika 4.9: Prezračevalni sistem
Prva celota obsega restavracijo s kuhinjo, kjer je projektiran sistem s tlačno komoro, sesalno
komoro in sekcijskim grelcem in hladilnikom. Komore so opremljene s frekvenčno
reguliranimi ventilatorji, toplovodnim grelcem in hladilnikom ter z različnimi senzorji, s
katerimi se spremlja trenutno stanje dela sistema. Tlačna zračna komora je predvidena za delo
s 100 % deležem svežega zraka v času celotnega režima obdelave. Za absorpcijo vonjav iz
kuhinje se uporablja filter z aktivnim ogljem. Za restavracijo je pomembno vzpostaviti
izmenjavanje zraka, zato se kuhinja nahaja v podtlaku glede na ostale prostore, kar preprečuje
širjenje vonjav iz kuhinje. Največja pretočna količina zraka za ta sistem je 3.300 m3/h.
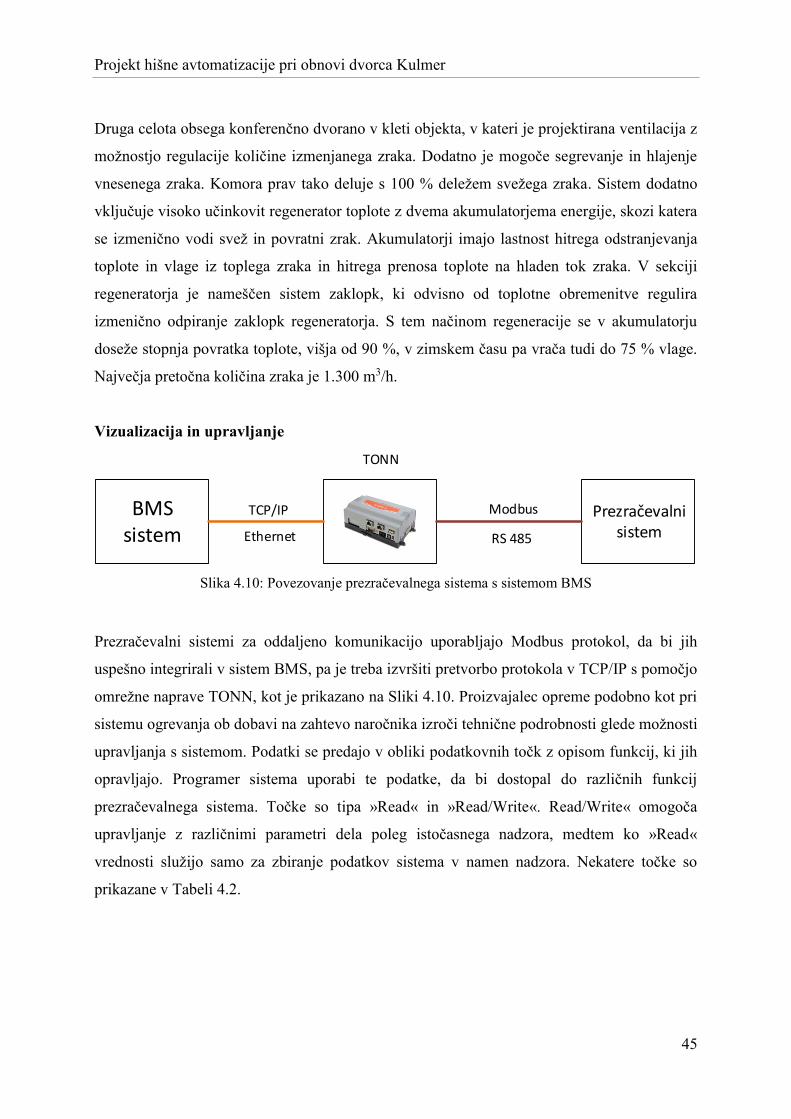
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
45
Druga celota obsega konferenčno dvorano v kleti objekta, v kateri je projektirana ventilacija z
možnostjo regulacije količine izmenjanega zraka. Dodatno je mogoče segrevanje in hlajenje
vnesenega zraka. Komora prav tako deluje s 100 % deležem svežega zraka. Sistem dodatno
vključuje visoko učinkovit regenerator toplote z dvema akumulatorjema energije, skozi katera
se izmenično vodi svež in povratni zrak. Akumulatorji imajo lastnost hitrega odstranjevanja
toplote in vlage iz toplega zraka in hitrega prenosa toplote na hladen tok zraka. V sekciji
regeneratorja je nameščen sistem zaklopk, ki odvisno od toplotne obremenitve regulira
izmenično odpiranje zaklopk regeneratorja. S tem načinom regeneracije se v akumulatorju
doseže stopnja povratka toplote, višja od 90 %, v zimskem času pa vrača tudi do 75 % vlage.
Največja pretočna količina zraka je 1.300 m3/h.
Vizualizacija in upravljanje
BMS sistem
ModbusTCP/IP Prezračevalni sistem
TONN
RS 485Ethernet
Slika 4.10: Povezovanje prezračevalnega sistema s sistemom BMS
Prezračevalni sistemi za oddaljeno komunikacijo uporabljajo Modbus protokol, da bi jih
uspešno integrirali v sistem BMS, pa je treba izvršiti pretvorbo protokola v TCP/IP s pomočjo
omrežne naprave TONN, kot je prikazano na Sliki 4.10. Proizvajalec opreme podobno kot pri
sistemu ogrevanja ob dobavi na zahtevo naročnika izroči tehnične podrobnosti glede možnosti
upravljanja s sistemom. Podatki se predajo v obliki podatkovnih točk z opisom funkcij, ki jih
opravljajo. Programer sistema uporabi te podatke, da bi dostopal do različnih funkcij
prezračevalnega sistema. Točke so tipa »Read« in »Read/Write«. Read/Write« omogoča
upravljanje z različnimi parametri dela poleg istočasnega nadzora, medtem ko »Read«
vrednosti služijo samo za zbiranje podatkov sistema v namen nadzora. Nekatere točke so
prikazane v Tabeli 4.2.
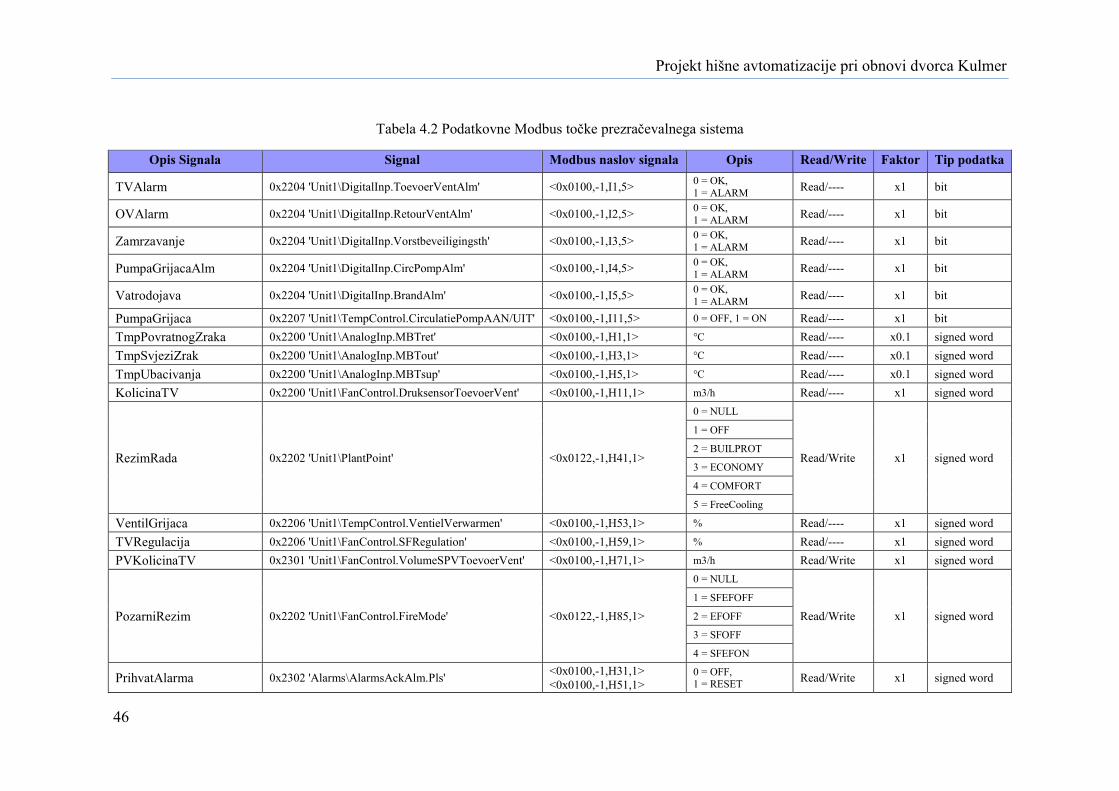
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
46
Tabela 4.2 Podatkovne Modbus točke prezračevalnega sistema
Opis Signala Signal Modbus naslov signala Opis Read/Write Faktor Tip podatka
TVAlarm 0x2204 'Unit1\DigitalInp.ToevoerVentAlm' <0x0100,-1,I1,5> 0 = OK,
1 = ALARM Read/---- x1 bit
OVAlarm 0x2204 'Unit1\DigitalInp.RetourVentAlm' <0x0100,-1,I2,5> 0 = OK,
1 = ALARM Read/---- x1 bit
Zamrzavanje 0x2204 'Unit1\DigitalInp.Vorstbeveiligingsth' <0x0100,-1,I3,5> 0 = OK,
1 = ALARM Read/---- x1 bit
PumpaGrijacaAlm 0x2204 'Unit1\DigitalInp.CircPompAlm' <0x0100,-1,I4,5> 0 = OK,
1 = ALARM Read/---- x1 bit
Vatrodojava 0x2204 'Unit1\DigitalInp.BrandAlm' <0x0100,-1,I5,5> 0 = OK,
1 = ALARM Read/---- x1 bit
PumpaGrijaca 0x2207 'Unit1\TempControl.CirculatiePompAAN/UIT' <0x0100,-1,I11,5> 0 = OFF, 1 = ON Read/---- x1 bit
TmpPovratnogZraka 0x2200 'Unit1\AnalogInp.MBTret' <0x0100,-1,H1,1> °C Read/---- x0.1 signed word
TmpSvjeziZrak 0x2200 'Unit1\AnalogInp.MBTout' <0x0100,-1,H3,1> °C Read/---- x0.1 signed word
TmpUbacivanja 0x2200 'Unit1\AnalogInp.MBTsup' <0x0100,-1,H5,1> °C Read/---- x0.1 signed word
KolicinaTV 0x2200 'Unit1\FanControl.DruksensorToevoerVent' <0x0100,-1,H11,1> m3/h Read/---- x1 signed word
RezimRada 0x2202 'Unit1\PlantPoint' <0x0122,-1,H41,1>
0 = NULL
Read/Write x1 signed word
1 = OFF
2 = BUILPROT
3 = ECONOMY
4 = COMFORT
5 = FreeCooling
VentilGrijaca 0x2206 'Unit1\TempControl.VentielVerwarmen' <0x0100,-1,H53,1> % Read/---- x1 signed word
TVRegulacija 0x2206 'Unit1\FanControl.SFRegulation' <0x0100,-1,H59,1> % Read/---- x1 signed word
PVKolicinaTV 0x2301 'Unit1\FanControl.VolumeSPVToevoerVent' <0x0100,-1,H71,1> m3/h Read/Write x1 signed word
PozarniRezim 0x2202 'Unit1\FanControl.FireMode' <0x0122,-1,H85,1>
0 = NULL
Read/Write x1 signed word
1 = SFEFOFF
2 = EFOFF
3 = SFOFF
4 = SFEFON
PrihvatAlarma 0x2302 'Alarms\AlarmsAckAlm.Pls' <0x0100,-1,H31,1>
<0x0100,-1,H51,1> 0 = OFF, 1 = RESET
Read/Write x1 signed word

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
47
TlacniFilterAlarm 0x2204 'Unit1\DigitalInp.ToevoerFilterAlarm' <0x0100,-1,I18,5> 0 = OK,
1 = ALARM Read/---- x1 bit
OtpadniFilterAlarm 0x2204 'Unit1\DigitalInp.RetourFilterAlarm' <0x0100,-1,I19,5> 0 = OK,
1 = ALARM Read/---- x1 bit
TVstart/stop 0x2207 'Unit1\FanControl.SFstart/stop' <0x0100,-1,I20,5> 0 = OFF, 1 = ON Read/---- x1 bit
OVstart/stop 0x2207 'Unit1\FanControl.EFstart/stop' <0x0100,-1,I21,5> 0 = OFF, 1 = ON Read/---- x1 bit
LEVKitAlarm 0x2204 'Unit1\DigitalInp.LEVkitAlarmCK1' <0x0100,-1,I23,5> 0 = OK,
1 = ALARM Read/---- x1 bit
VRF Start 0x2207 'Unit1\TempControl.LevKitCK1Start' <0x0100,-1,I25,5> 0 = OFF, 1 = ON Read/---- x1 bit
PreklopZima/Ljeto 0x2207 'Unit1\TempControl.InverterChangeover' <0x0100,-1,I26,5> 0 = HEATING Read/---- x1 bit
StvarnaPVKolicineTV 0x230A 'Unit1\FanControl.VolumeTVActualValue' <0x0100,-1,H117,3> m3/h Read/---- x1 signed long
MinPVTemp 0x2301 'Unit1\aoMinMaxTmpCtlr.MinSpv' <0x0100,-1,H121,3> °C Read/---- x1 signed long
MaksPVTemp 0x2301 'Unit1\aoMinMaxTmpCtlr.MaxSpv' <0x0100,-1,H123,3> °C Read/---- x1 signed long
PPZOtvorena 0x2204 'Unit1\DigitalInp.PPZ1Status' <0x0100,-1,I39,5> 0 = OFF, 1 = ON Read/---- x1 bit
VRF Regulacija 0x2206 'Unit1\TempControl.LEVkitRegelaar' <0x0100,-1,H135,1> % Read/---- x1 signed word
MBSPVTmpHtgCmf 0x2301 'Unit1\TempControl.MBSPVTmpHtgCmf' <0x0100,-1,H153,1> °C Read/Write x10 signed word
MBSPVTmpClgCmf 0x2301 'Unit1\TempControl.MBSPVTmpClgCmf' <0x0100,-1,H155,1> °C Read/Write x10 signed word
MBSPVTmpHtgEco 0x2301 'Unit1\TempControl.MBSPVTmpHtgEco' <0x0100,-1,H157,1> °C Read/Write x10 signed word
MBSPVTmpClgEco 0x2301 'Unit1\TempControl.MBSPVTmpClgEco' <0x0100,-1,H159,1> °C Read/Write x10 signed word
MBSPVTmpOutMax 0x2301 'Unit1\TempControl.MBSPVTmpOutMax' <0x0100,-1,H163,1> °C Read/Write x10 signed word
MBSPVTmpSplyMin 0x2301 'Unit1\TempControl.MBSPVTmpSplyMin' <0x0100,-1,H165,1> °C Read/Write x10 signed word
MBSPVTmpSplyMax 0x2301 'Unit1\TempControl.MBSPVTmpSplyMax' <0x0100,-1,H167,1> °C Read/Write x10 signed word
ZaluzinaSvjeziZrakStart 0x2207 'Unit1\FanControl.BuitenluchtStart' <0x0100,-1,I43,5> 0 = OFF, 1 = ON Read/---- x1 bit
ZaluzinaOtpadniZrakStart 0x2207 'Unit1\FanControl.AfvoerluchtStart' <0x0100,-1,I44,5> 0 = OFF, 1 = ON Read/---- x1 bit
OVRemenAlarm 0x2204 'Unit1\DigitalInp.RetourVentBeltAlm' <0x0100,-1,I46,5> 0 = OK, 1 = ALARM Read/---- x1 bit
LEVKitOdmrzavanje 0x2204 'Unit1\DigitalInp.LEVkitOntodooicyclusCK1' <0x0100,-1,I47,5> 0 = OK, 1 = DEFROST
Read/---- x1 bit
SobnaTemperatura 0x2200 'Unit1\AnalogInp.MBRoomTemp' <0x0100,-1,H197,1> °C Read/---- x0.1 signed word
PumpaGrijHlad 0x2207 'Unit1\TempControl.CirculatiePompAAN/UIT' <0x0100,-1,I85,5> 0 = OFF, 1 = ON Read/---- x1 bit
KrilnaSklopka 0x2204 'Unit1\DigitalInp.FlowSw' <0x0100,-1,I88,5> 0 = OFF, 1 = ON Read/---- x1 bit
OdsisniFilter2Alm 0x2204 'Unit1\DigitalInp.ExtFltr2Alm' <0x0100,-1,I89,5> 0 = OK, 1 = ALARM Read/---- x1 bit
VentilPlina 0x2207 'Unit1\FanControl.GasValveOpen' <0x0100,-1,I91,5> 0 = OFF, 1 = ON Read/---- x1 bit
PPZGrupniAlarm 0x2207 'Unit1\FanControl.PPZCommAlm' <0x0100,-1,I92,5> 0 = OK, 1 = ALARM Read/---- x1 bit

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
48
Vizualizirani prikaz upravljanja s sistemoma prezračevanja v objektu je prikazan s slikama
4.11 in 4.12 ter zajema vse pomembne informacije, ki so potrebne za varno in kakovostno
rokovanje s sistemom na najoptimalnejši način. Izvajalec del je na zahtevo vlagateljev
omogočil naslednje funkcije za upravljanje in nadzor sistema izmenjave zraka:
• vklop in izklop sistema na daljavo,
• izbira med štirimi načini dela: Eco, Comfort, Free Cool, Protection,
• regulacija temperature vpihovanja z možnostjo dodatnega gretja in hlajenja zraka,
• frekvenčna regulacija hitrosti ventilatorja od 0 do 100 % glede na želje in potrebe,
• status količine pretoka, prikazan v kubičnih metrih na uro [m3/h],
• status filtra, ki daje informacijo o potrebi po zamenjavi filtra. Sistem javlja sporočila o
napaki s pomočjo vizualnega indikatorja, ki se prikazuje na zaslonu, istočasno pa
pošlje e-pošto na e-naslove ljudi, zadolžene za vzdrževanje sistema,
• status vhodnih in izhodnih temperatur zraka,
• status odprtja zaščitnih rešetk,
• koledarski izbor časa po dnevu in uri, s čimer je omogočeno določanje časovnih
dogodkov dela sistema,
• status rekuperacije zraka pove, v kakšnem odstotku se trenutno rekuperira zrak,
• sistem je integriran s protipožarnim sistemom in če bi prišlo do požarnega alarma, bi
ventilacijskih sistem samodejno zaprl zaščitne rešetke, da zmanjša dotok kisika v
prostore.
Možnosti za izboljšave
Možnosti za izboljšave so v prvi vrsti vezane na zbiranje podatkov s preostalih senzorjev,
vgrajenih v sistem. Največje možnosti izboljšanja so oblikovalske narave, da bi bili podatki
bolj čitljivi za uporabnika sistema. Boljša rešitev bi bilo upravljanje prezračevanja v
konferenčni dvorani prek CO2 senzorja, ki trenutno ni vgrajen, ampak bi se lahko
implementiral v sistem. Z njim bi bilo mogoče merjenje kakovosti zraka v prostoru, v katerem
prebivajo ljudje.
Koncentracija CO2 je tesno povezana s številom ljudi v prostoru ter z njihovo aktivnostjo, s
tem pa je dober pokazatelj onesnaženosti zraka v bivalnih prostorih. Zanimivo je, da ko se
koncentracija CO2 v prostoru ustali, ta ni odvisna od velikosti prostora, ampak le od količine
izmenjanega zraka. Tako nam lahko koncentracija CO2 pravzaprav pokaže resnično
izmenjavo zraka v prostoru oz. stopnjo prezračevanja.

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
49
Slika 4.11: BMS-vizualizacija prezračevalnega sistema za konferenčno dvorano

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
50
Slika 4.12: BMS-vizualizacija prezračevalnega sistema za kuhinjo in restavracijo

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
51
4.4 Sistem hlajenja
Za hlajenje objekta se v skladu s projektom vgrajuje sistem z variabilnim pretokom VRV
(angl. Variant Refigerent Volume) zeotropne hladilne snovi R-410A proizvajalca Daikin.
Zunanje enote so predvidene v izvedbi toplotne črpale z vgrajenimi hermetičnimi kompresorji
in izmenjevalci (Slika 4.13). Notranje enote predstavljajo parapetne, zidne in kasetne enote
kot grelna/hladilna telesa. Opremljene so z ventilatorji za distribucijo zraka, izmenjevalcem
toplote z neposredno ekspanzijo freona, z elektronskim ekspanzijskim ventilom in z vsemi
potrebnimi elementi za zaščito, nadzor in regulacijo. Projektirani so zasebni sistemi hlajenja
za vsako etažo posebej.
Slika 4.13: Zunanja VRV-enota
Zunanje enote:
2 x Daikin VRV IV – TIP: RYYQ8T
Tehnične značilnosti:
• Qgr = 25 kW
• Qhi = 22,4 kW
• Pel = 5,91 kW
• delovno področje: gretje: od −20° do 15 °C
• delovno področje: hlajenje: od −5° do 43 °C
• dimenzije skupaj: 930 x 765 mm ; h = 1685 mm
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
52
• teža skupaj: 261 kg
• raven zvočnega tlaka: 58 dB(A) na oddaljenosti 1 m od enote
1 x Daikin VRV III tip REYQ10P8.OU
Tehnične lastnosti:
• Qh skupaj = 28,0 kW
• delovno področje: gretje: od −20° do 15 °C
• delovno področje: hlajenje: od −5° do 43 °C
• dimenzije skupaj: 1.300 x 765 mm; h = 1.680 mm
• teža skupaj: 331 kg
• raven zvočnega tlaka: 58 dB(A) na oddaljenosti 1 m od enote
• teža skupaj: 331 kg
Notranje enote
Notranje enote so prav tako od proizvajalca Daikin v razponu moči od 1,7 do 3,6 kW, na
katere je vgrajen vmesnik tipa Daikin Klic-DI, ki omogoča popolno integracijo klimatskih
naprav s krmilnimi sistemi KNX. Vmesnik omogoča dupleksno komunikacijo med sistemom
KNX in klimatsko napravo. Zaradi dvosmerne komunikacije se lahko klimatska naprava
upravlja na enak način kot z lastnimi krmilnimi napravami, medtem ko se dejansko stanje
klimatske naprave spremlja in redno pošlje na vodilo KNX, da obvesti druge naprave. S
sistemom KNX se lahko nadzira naslednje osnovne funkcije klimatske naprave:
• vklop/izklop klimatske naprave,
• nastavitev temperature med 16 in 32 ºC.
• način delovanja: samodejno, toplotno, hladno, ventilatorsko in suho (angl. Automatic,
Heat, Cool, Fan and Dry),
• hitrost ventilatorja: konfiguracija 3 stopenj hitrosti,
• funkcija Swing: vedno v enem položaju ali neprekinjeno gibanje.
Tej funkcionalnosti sledijo spremembe v stanju naprave, ki se redno pošiljajo na Klic-DI. Ko
Klic-DI od naprave prejme stanje, ki je drugačno kot prejšnje, posodablja statusne objekte in
jih pošlje na vodilo KNX.

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
53
VRV-enote se primarno koristijo za hlajenje objekta in po potrebi v primeru nizkih
temperatur,
če se ne bi uspela doseči želena temperatura z uporabo primarnega sistema ogrevanja, bi se
vključilo dodatno ogrevanja z enotami VRV. Upravljanje in vizualizacija sta opisana v
naslednjem poglavju.
4.5 Upravljanje temperatur v prostorih
Upravljanje temperatur v dvorcu Kulmer je izvedeno consko in za vsak prostor posebej.
Odvisno od vremenskih razmer in zunanje temperature oseba, zadolžena za management,
izbere osrednji režim dela sistema, ki je lahko v načinu gretja ali hlajenja. Skozi sistem BMS
se izbere jakost delovanja z enostavnim klikom na tipko »ljeto/zima«. »Ljeto« pomeni, da gre
sistem v način hlajenja, in »zima« sistem prestavi v način ogrevanja (Slika 4.14).
Slika 4.14: Mod ogrevanje/hlajenje
Temperaturni senzorji so naprave KNX i se nahajajo v vseh prostorih v objektu. S tem je
omogočeno zasebno fizično določanje želene vrednosti temperature v kateremkoli prostoru
glede na želje in potrebe uporabnika. Slika 4.15 prikazuje funkcijski blok diagram
upravljanja temperature.
Kontrolni algoritem
Kotni ventil
Grelec/hladilec
Soba
Vstopna temperatura
Sončna svetlobaZunanja
temp Ljudje
Sobni termostat
+
-
Sobna temperatura
Ciljna temperatura
Slika 4.15: Določanje temperature
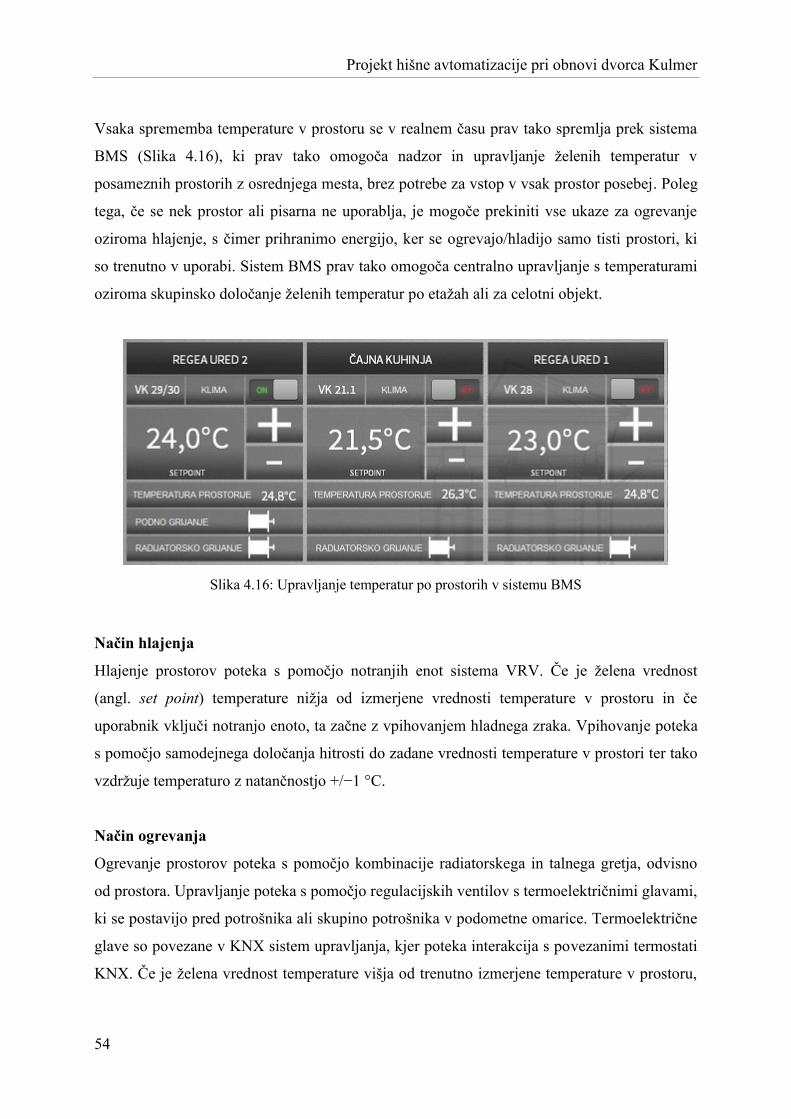
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
54
Vsaka sprememba temperature v prostoru se v realnem času prav tako spremlja prek sistema
BMS (Slika 4.16), ki prav tako omogoča nadzor in upravljanje želenih temperatur v
posameznih prostorih z osrednjega mesta, brez potrebe za vstop v vsak prostor posebej. Poleg
tega, če se nek prostor ali pisarna ne uporablja, je mogoče prekiniti vse ukaze za ogrevanje
oziroma hlajenje, s čimer prihranimo energijo, ker se ogrevajo/hladijo samo tisti prostori, ki
so trenutno v uporabi. Sistem BMS prav tako omogoča centralno upravljanje s temperaturami
oziroma skupinsko določanje želenih temperatur po etažah ali za celotni objekt.
Slika 4.16: Upravljanje temperatur po prostorih v sistemu BMS
Način hlajenja
Hlajenje prostorov poteka s pomočjo notranjih enot sistema VRV. Če je želena vrednost
(angl. set point) temperature nižja od izmerjene vrednosti temperature v prostoru in če
uporabnik vključi notranjo enoto, ta začne z vpihovanjem hladnega zraka. Vpihovanje poteka
s pomočjo samodejnega določanja hitrosti do zadane vrednosti temperature v prostori ter tako
vzdržuje temperaturo z natančnostjo +/−1 °C.
Način ogrevanja
Ogrevanje prostorov poteka s pomočjo kombinacije radiatorskega in talnega gretja, odvisno
od prostora. Upravljanje poteka s pomočjo regulacijskih ventilov s termoelektričnimi glavami,
ki se postavijo pred potrošnika ali skupino potrošnika v podometne omarice. Termoelektrične
glave so povezane v KNX sistem upravljanja, kjer poteka interakcija s povezanimi termostati
KNX. Če je želena vrednost temperature višja od trenutno izmerjene temperature v prostoru,

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
55
termostat pošlje zahtevo za gretje prostora. Pri tem se ventili radiatorja in/ali talnega gretja
vklopijo in v sistemu zakroži topla voda. Z dosegom želene vrednosti temperature v prostoru,
se termoelektrične glave zaprejo in se prekine pretok tople vode skozi radiatorje in talno
gretje. Tako se vzdržuje konstantna temperatura v prostoru z natančnostjo kot pri hlajenju
(+/−1 °C).
Magnetni stiki
Okna objekta so opremljena z magnetnimi stiki, ki so povezani s sistemom KNX. Ti
zaznavajo odprtje okna in v primeru, da je okno odprto, se samodejno prekine ukaz za
gretje/hlajenje prostora. To je pametna rešitev v poslovnih prostorih, kjer uporabniki
neposredno ne plačujejo računov in zato ne dajejo pozornosti potrošnji energije. S takšno
rešitvijo se onemogoča nepotrebno razsipavanje z energijo.
Slika 4.17: Magnetni stiki na oknih v sistemu BMS
Slika 4.17 prikazuje statuse magnetnih stikov na oknih v sistemu BMS. Kot je razvidno, so
okna v pisarnah »Ured 2« in »Ured 3« zaprta, v pisarni »Ured 1« pa je okno odprto. V Prilogi
C je shema priključevanja magnetnih stikov v električno inštalacijo KNX.
4.6 Razsvetljava
Celoten sistem razsvetljave v objektu je izveden s pomočjo sistema električnih inštalacij
KNX, in sicer s klasičnim On/Off načinom. Deluje kot omrežje senzorjev in aktuatorjev
KNX. Razsvetljavo je mogoče upravljati:
• ročno s pomočjo stikala v prostorih (Slika 4.18),
• prek vizualiziranega vmesnika BMS, posamezno ali skupinsko,
• avtomatično prek senzorja premikanja,
• avtomatično prek senzorja prisotnosti.
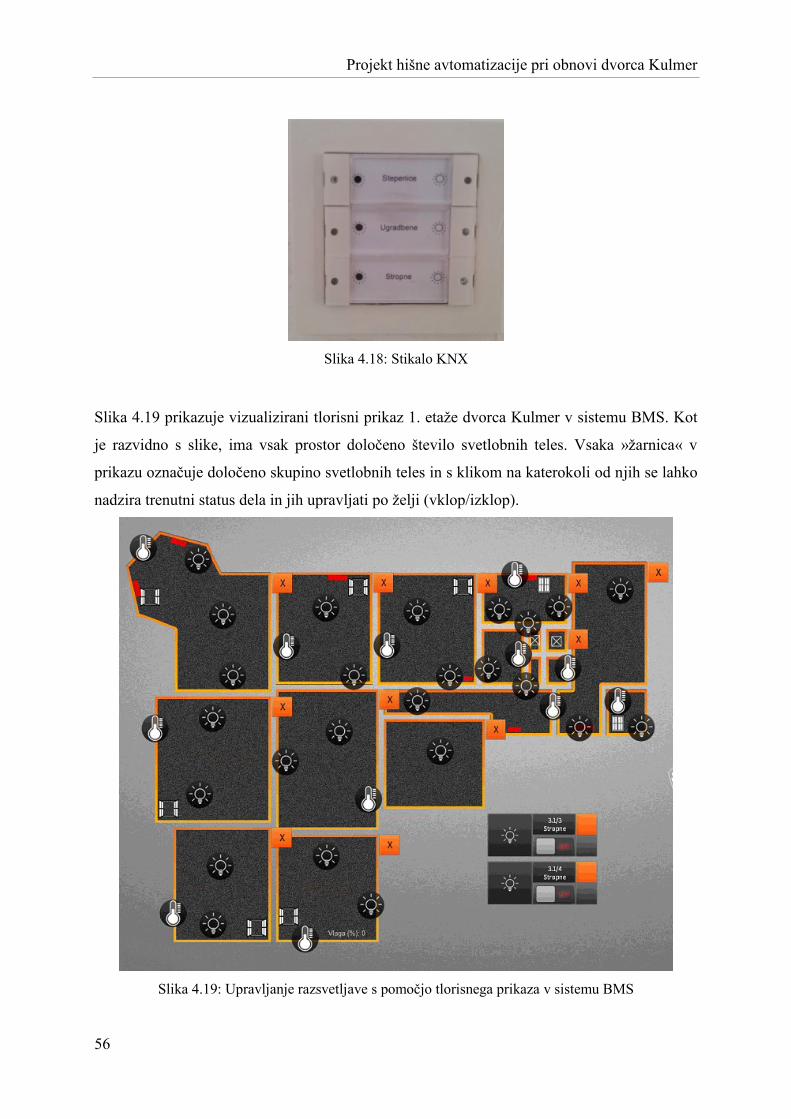
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
56
Slika 4.18: Stikalo KNX
Slika 4.19 prikazuje vizualizirani tlorisni prikaz 1. etaže dvorca Kulmer v sistemu BMS. Kot
je razvidno s slike, ima vsak prostor določeno število svetlobnih teles. Vsaka »žarnica« v
prikazu označuje določeno skupino svetlobnih teles in s klikom na katerokoli od njih se lahko
nadzira trenutni status dela in jih upravljati po želji (vklop/izklop).
Slika 4.19: Upravljanje razsvetljave s pomočjo tlorisnega prikaza v sistemu BMS
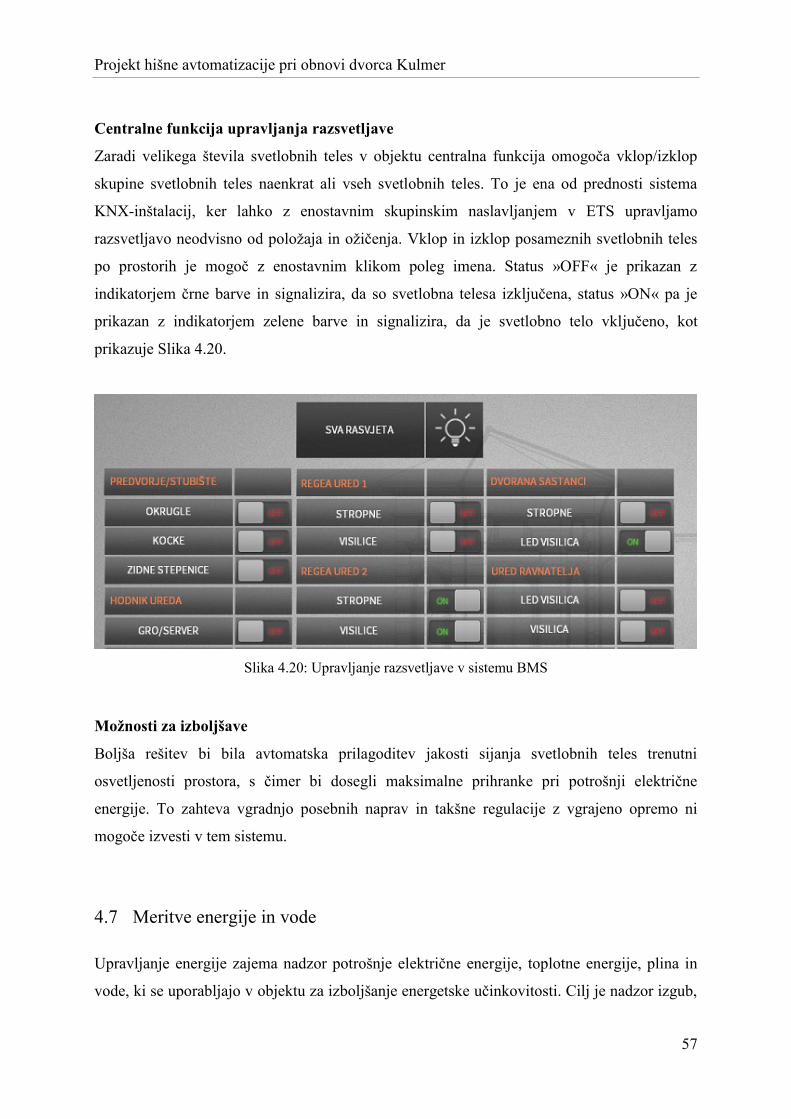
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
57
Centralne funkcija upravljanja razsvetljave
Zaradi velikega števila svetlobnih teles v objektu centralna funkcija omogoča vklop/izklop
skupine svetlobnih teles naenkrat ali vseh svetlobnih teles. To je ena od prednosti sistema
KNX-inštalacij, ker lahko z enostavnim skupinskim naslavljanjem v ETS upravljamo
razsvetljavo neodvisno od položaja in ožičenja. Vklop in izklop posameznih svetlobnih teles
po prostorih je mogoč z enostavnim klikom poleg imena. Status »OFF« je prikazan z
indikatorjem črne barve in signalizira, da so svetlobna telesa izključena, status »ON« pa je
prikazan z indikatorjem zelene barve in signalizira, da je svetlobno telo vključeno, kot
prikazuje Slika 4.20.
Slika 4.20: Upravljanje razsvetljave v sistemu BMS
Možnosti za izboljšave
Boljša rešitev bi bila avtomatska prilagoditev jakosti sijanja svetlobnih teles trenutni
osvetljenosti prostora, s čimer bi dosegli maksimalne prihranke pri potrošnji električne
energije. To zahteva vgradnjo posebnih naprav in takšne regulacije z vgrajeno opremo ni
mogoče izvesti v tem sistemu.
4.7 Meritve energije in vode
Upravljanje energije zajema nadzor potrošnje električne energije, toplotne energije, plina in
vode, ki se uporabljajo v objektu za izboljšanje energetske učinkovitosti. Cilj je nadzor izgub,
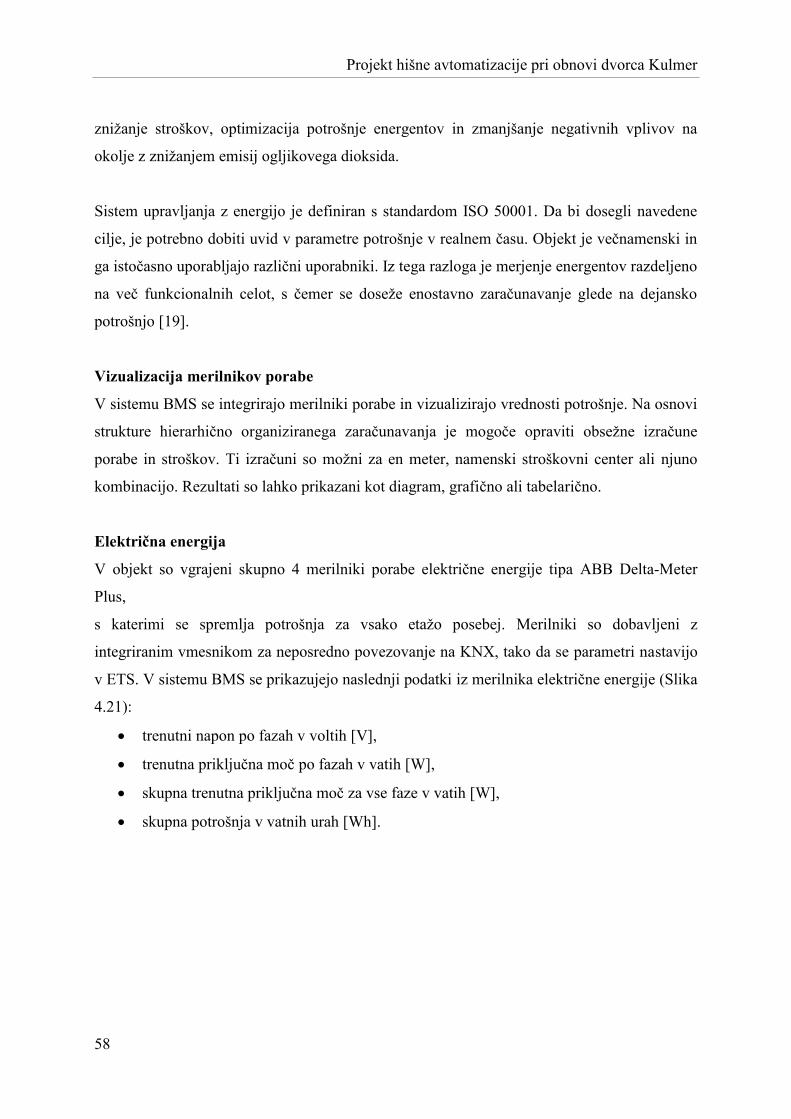
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
58
znižanje stroškov, optimizacija potrošnje energentov in zmanjšanje negativnih vplivov na
okolje z znižanjem emisij ogljikovega dioksida.
Sistem upravljanja z energijo je definiran s standardom ISO 50001. Da bi dosegli navedene
cilje, je potrebno dobiti uvid v parametre potrošnje v realnem času. Objekt je večnamenski in
ga istočasno uporabljajo različni uporabniki. Iz tega razloga je merjenje energentov razdeljeno
na več funkcionalnih celot, s čemer se doseže enostavno zaračunavanje glede na dejansko
potrošnjo [19].
Vizualizacija merilnikov porabe
V sistemu BMS se integrirajo merilniki porabe in vizualizirajo vrednosti potrošnje. Na osnovi
strukture hierarhično organiziranega zaračunavanja je mogoče opraviti obsežne izračune
porabe in stroškov. Ti izračuni so možni za en meter, namenski stroškovni center ali njuno
kombinacijo. Rezultati so lahko prikazani kot diagram, grafično ali tabelarično.
Električna energija
V objekt so vgrajeni skupno 4 merilniki porabe električne energije tipa ABB Delta-Meter
Plus,
s katerimi se spremlja potrošnja za vsako etažo posebej. Merilniki so dobavljeni z
integriranim vmesnikom za neposredno povezovanje na KNX, tako da se parametri nastavijo
v ETS. V sistemu BMS se prikazujejo naslednji podatki iz merilnika električne energije (Slika
4.21):
• trenutni napon po fazah v voltih [V],
• trenutna priključna moč po fazah v vatih [W],
• skupna trenutna priključna moč za vse faze v vatih [W],
• skupna potrošnja v vatnih urah [Wh].
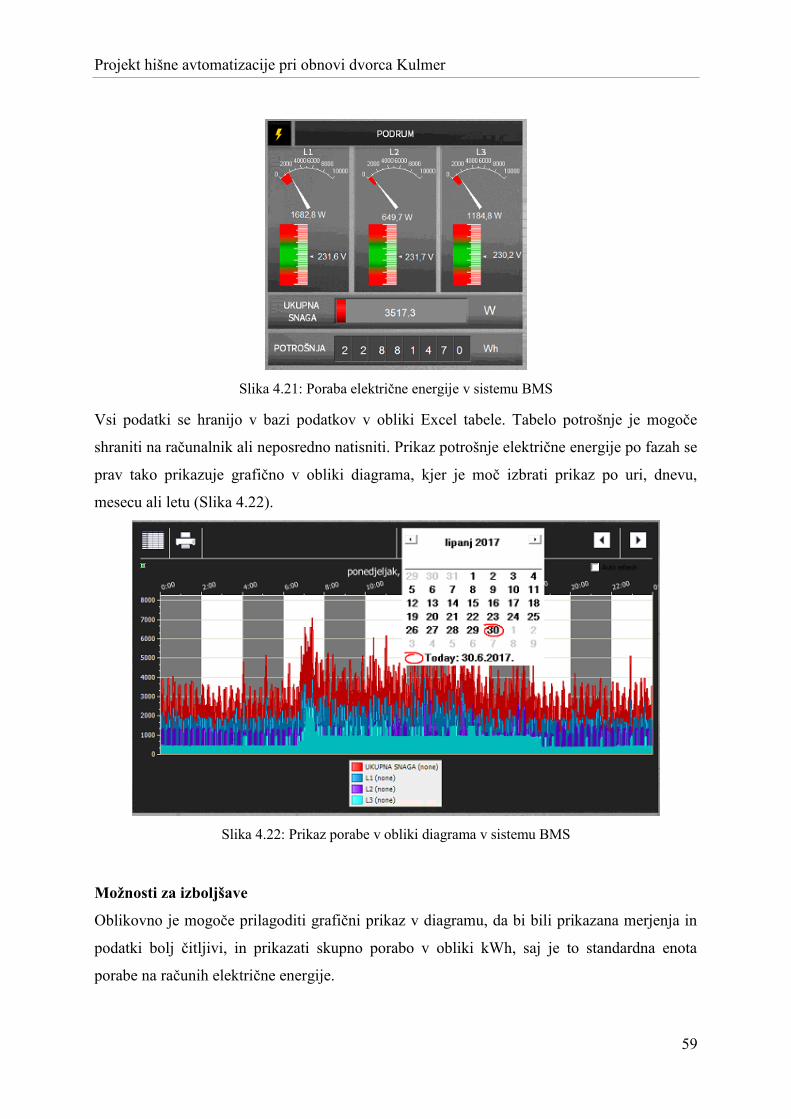
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
59
Slika 4.21: Poraba električne energije v sistemu BMS
Vsi podatki se hranijo v bazi podatkov v obliki Excel tabele. Tabelo potrošnje je mogoče
shraniti na računalnik ali neposredno natisniti. Prikaz potrošnje električne energije po fazah se
prav tako prikazuje grafično v obliki diagrama, kjer je moč izbrati prikaz po uri, dnevu,
mesecu ali letu (Slika 4.22).
Slika 4.22: Prikaz porabe v obliki diagrama v sistemu BMS
Možnosti za izboljšave
Oblikovno je mogoče prilagoditi grafični prikaz v diagramu, da bi bili prikazana merjenja in
podatki bolj čitljivi, in prikazati skupno porabo v obliki kWh, saj je to standardna enota
porabe na računih električne energije.

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
60
Toplotna energija
Merjenje toplotne energije v objektu poteka s pomočjo 5 merilnikov porabe toplotne energije
– kalorimetrov tipa Danfoss Sonometer. Izračun energije vključuje merjenje temperature na
izhodni in povratni cevi kot tudi faktor korekcije za gostoto medija in energijo. Na osnovi
pretoka vode in temperaturne razlike med dotokom in odtokom toplotni merilnik izračuna
količino oddane toplotne energije in jo prikaže v fizikalnih enotah. Postavljen je na odsek za
gretje in na odsek sanitarne vode za vsako celoto posebej. V sistemu BMS so vizualizirani
naslednji podatki iz merilnika toplotne energije (Slika 4.23):
• trenutni in skupni pretok v kubičnih metrih [m3],
• trenutna potrošnja energije v vatih [W],
• skupna potrošena energija v vatnih urah [Wh].
Slika 4.23: Merilniki porabe toplotne energije v sistemu BMS
Vsi podatki se hranijo v bazi podatkov v obliki Excel tabele. Tabelo potrošnje toplotne
energije je mogoče shraniti na računalniku ali neposredno natisniti. Prikaz potrošnje toplotne
energije se prav tako prikaže grafično v obliki diagrama z možnostjo izbire želenega prikaza
po uri, dnevu, mesecu in letu. Ker je v času pisanja tega dela celoten sistem potekal v načinu
hlajenja, kalorimeter na Sliki 4.23 prikazuje trenutno izmerjeno moč in pretok 0.

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
61
Voda
V dvorcu Kulmer je skupno 8 merilnikov porabe vode. Opremljeni so z impulznimi izhodi, na
katere se priključi modul M-Bus (Slika 4.24). S parametri merjenja se določi pomen enega
izmerjenega impulza. Prenos informacij poteka prek vodila M-Bus in omogoča oddaljeno
odčitavanje. Način prenosa informacij je pojasnjen v poglavju o protokolu M-Bus.
Slika 4.24: Merilnik vode z modulom M-Bus
Oddaljeno odčitavanje merilnika vode poteka v realnem času prek vizualiziranega vmesnika v
sistemu BMS, kot prikazuje Slika 4.25. Merilniki so razdeljeni tako, da se spremlja poraba
vode po celotah oziroma etažah in poraba deževnice, ki se je zbrala in koristi za izpiranje
sanitarnih vozlov in zalivanje parka.
Slika 4.25: Merilniki porabe vode v sistemu BMS

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
62
Plin
V dvorcu Kulmer se nahajata skupno 2 merilnika porabe plina. Opremljena sta z impulznimi
izhodi, na katere se priključi modul M-Bus (Slika 4.26). S parametri merjenja se določa
pomen enega izmerjenega impulza. Prenos informacij poteka prek vodila M-Bus in omogoča
oddaljeno odčitavanje. Način prenosa informacij je pojasnjen v poglavju o protokolu M-Bus.
Slika 4.26: Merilnik plina z modulom M-Bus
Oddaljeno odčitavanje merilnika poteka v realnem času s pomočjo vizualiziranega vmesnika
v sistemu BMS, kot prikazuje Slika 4.27. Merilnik 1 je za restavracijo, merilnik 2 pa za
mikrogeneracijski kotel, ki v času pisanja tega dela še ni deloval.
Slika 4.27: Merilniki porabe plina v sistemu BMS
4.8 Tehnična zaščita
Z analizo nevarnosti glede na namen, lokacijo in okolico dvorca Kulmer se lahko
predpostavlja, da bo ta v prvi vrsti izpostavljen nevarnosti vloma in kraj. Dostop do dvorca je
mogoče urediti iz vseh smeri, vendar visoki gozd olajšuje neopazen dostop. Vlom v dvorec je
mogoč v pritličju skozi vsa vrata in okna.

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
63
Iz tega razloga je bila izvedena kategorizacija objekta s ciljem ocene ogroženosti. Na osnovi
določil Pravilnika o pogojih in načinu ocenjevanja tehnične zaščite (NN 198/3) se dvorec
Kulmer uvršča v 4. kategorijo, za katero je predvidena srednja stopnja zaščite. Na tej stopnji
tehnične zaščite se izvaja preventivno delovanje, zgodnje odkrivanje in rekonstrukcija
nevarnih situacij in dogodkov.
Protivlomni sistem temelji na profesionalni protivlomni centrali, s katero se povezujejo
periferni elementi protivlomnega sistema; magnetni stiki, senzorji gibanja, senzorji lomljenja
stekla, upraviteljske tipkovnice, alarmne sirene. Centrala se lahko poveže v IP-omrežje, ki se
uporablja za integracijo protivlomnega sistema s sistemom videonadzora in požarnega
javljanja. Videonadzorni sistem je prav tako integriran v sistem BMS in služi v prvi vrsti za
nadzor objekta, medtem ko so pomembnejše funkcije, povezane s shranjevanjem alarmnih
dogodkov in poročanjem varnostnim službam, povezane s profesionalno protivlomno
centralo.
Videonadzorni sistem zajema 15 kamer, od katerih je 6 kamer pritrjenih na fasado, 9 pa se jih
nahaja znotraj dvorca. Vse kamere so HD 720p ločljivosti in omrežne izvedbe. Notranje
kamere so tipa SONY SNC-DH120, zunanje pa SONY SNC-DH160 (Tabela 4.3).
Tabela 4.3 Vgrajene kamere
Tip kamere/videz Število kamer Ločljivost Goriščna razdalja
objektiva
Notranje
kamere
9 1280 x 720p 3,1 mm
Zunanje
kamere
6 1280 x 720p 3,1 mm
Sitem videonadzora je vizualiziran v sistemu BMS, kot prikazuje Slika 4.28. S klikom na
videonadzor se v meniju pojavi tlorisni prikaz objekta z vrisanimi položaji notranjih in
zunanjih kamer. Z enostavnim klikom na kamero se odpre prikaz slike glede na položaj
kamere na objektu.
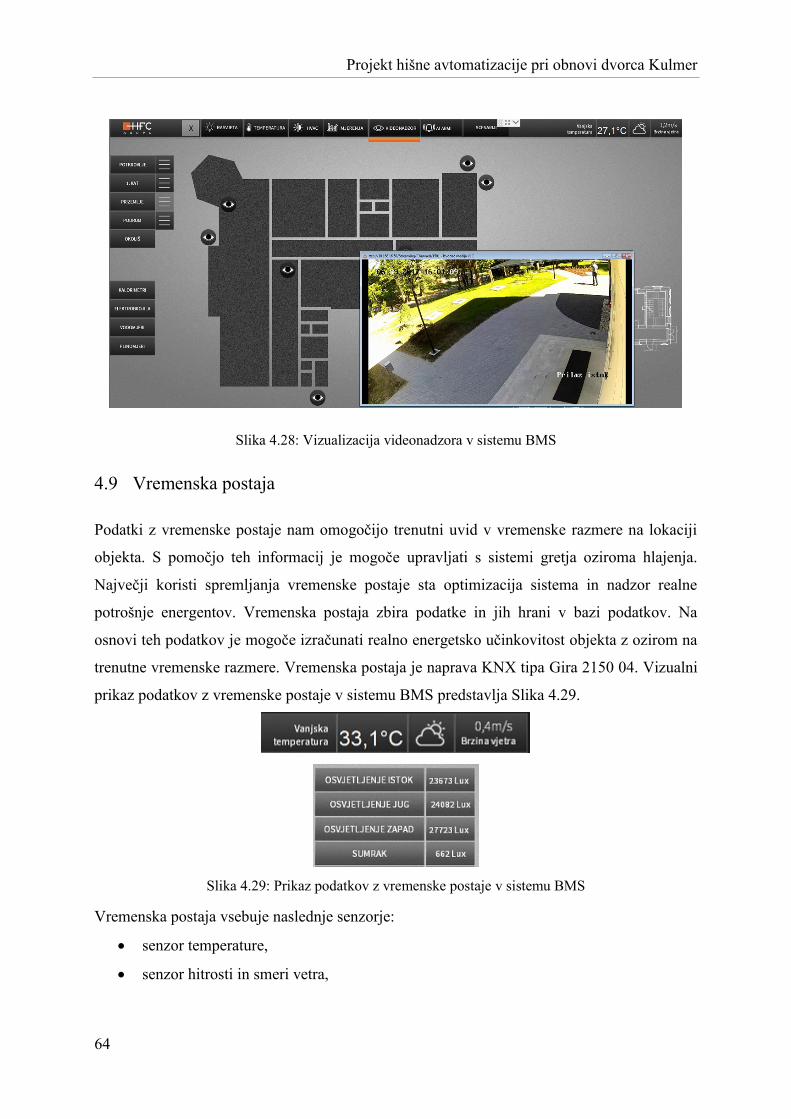
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
64
Slika 4.28: Vizualizacija videonadzora v sistemu BMS
4.9 Vremenska postaja
Podatki z vremenske postaje nam omogočijo trenutni uvid v vremenske razmere na lokaciji
objekta. S pomočjo teh informacij je mogoče upravljati s sistemi gretja oziroma hlajenja.
Največji koristi spremljanja vremenske postaje sta optimizacija sistema in nadzor realne
potrošnje energentov. Vremenska postaja zbira podatke in jih hrani v bazi podatkov. Na
osnovi teh podatkov je mogoče izračunati realno energetsko učinkovitost objekta z ozirom na
trenutne vremenske razmere. Vremenska postaja je naprava KNX tipa Gira 2150 04. Vizualni
prikaz podatkov z vremenske postaje v sistemu BMS predstavlja Slika 4.29.
Slika 4.29: Prikaz podatkov z vremenske postaje v sistemu BMS
Vremenska postaja vsebuje naslednje senzorje:
• senzor temperature,
• senzor hitrosti in smeri vetra,

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
65
• senzor padavin,
• senzor svetlobe.
4.10 Scenariji, spremljanje trendov in alarmna sporočila
Sistem BMS omogoča definiranje različnih delovnih scenarijev, s pomočjo katerih se upravlja
s celotnim sistemom ali zdeli sistema glede na želje in potrebe. Izbor scenarija je pogost
koncept v modernih sistemih hišne avtomatizacije, kjer uporabnik z enim pritiskom sproži
predhodno definirane naloge. Uporabniku sta zagotovljeni enostavnost upravljanja in
prihranek časa. Za sistem dvorca Kulmer so definirani 3 scenariji dela (Slika 4.30):
• nočni,
• dnevni in
• ekonomični.
Delovni scenariji se razlikujejo med sabo po določeni temperaturi prostora, načinu dela
prezračevalnega sistema in delovne razsvetljave.
Izbor scenarija se določi z enostavnim klikom v vizualnem prikazu poleg imena scenarija, ki
ga želimo vklopiti. Scenarije je mogoče prav tako regulirati s pomočjo koledarja, kjer obstaja
možnost določanja vklopa posameznih scenarijev po urah, dnevih in tednih.
Slika 4.30: Določanje scenarijev v sistemu BMS
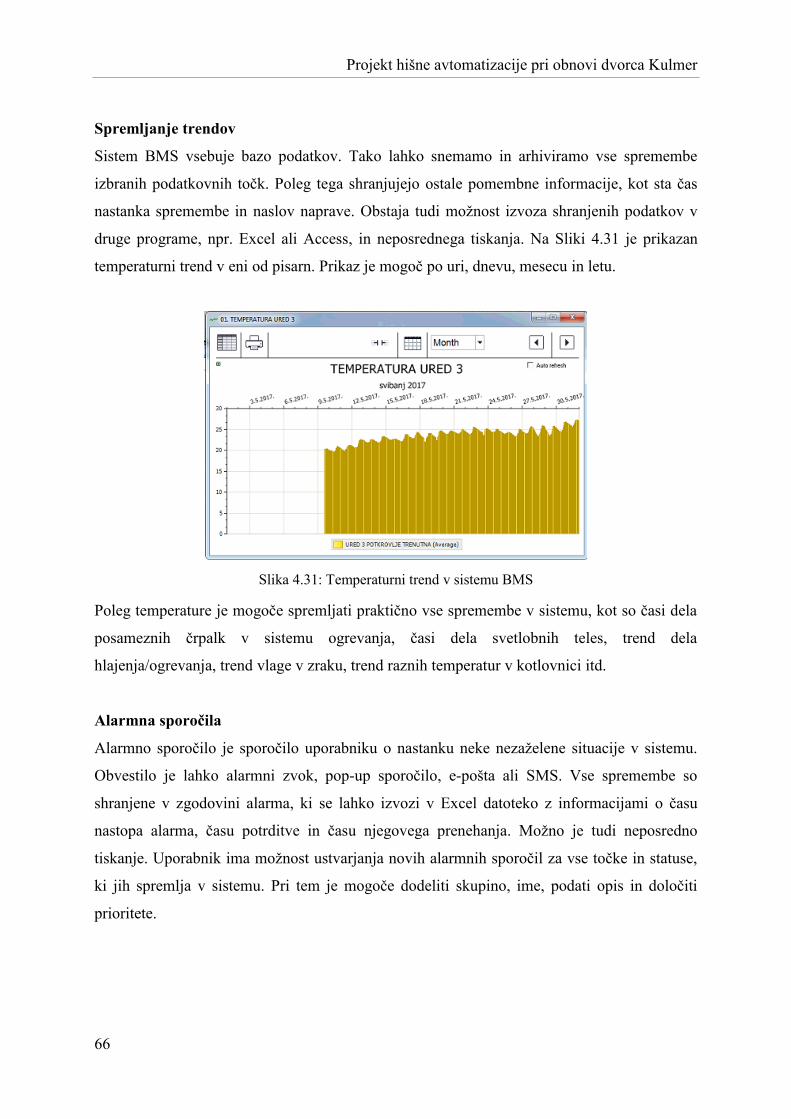
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
66
Spremljanje trendov
Sistem BMS vsebuje bazo podatkov. Tako lahko snemamo in arhiviramo vse spremembe
izbranih podatkovnih točk. Poleg tega shranjujejo ostale pomembne informacije, kot sta čas
nastanka spremembe in naslov naprave. Obstaja tudi možnost izvoza shranjenih podatkov v
druge programe, npr. Excel ali Access, in neposrednega tiskanja. Na Sliki 4.31 je prikazan
temperaturni trend v eni od pisarn. Prikaz je mogoč po uri, dnevu, mesecu in letu.
Slika 4.31: Temperaturni trend v sistemu BMS
Poleg temperature je mogoče spremljati praktično vse spremembe v sistemu, kot so časi dela
posameznih črpalk v sistemu ogrevanja, časi dela svetlobnih teles, trend dela
hlajenja/ogrevanja, trend vlage v zraku, trend raznih temperatur v kotlovnici itd.
Alarmna sporočila
Alarmno sporočilo je sporočilo uporabniku o nastanku neke nezaželene situacije v sistemu.
Obvestilo je lahko alarmni zvok, pop-up sporočilo, e-pošta ali SMS. Vse spremembe so
shranjene v zgodovini alarma, ki se lahko izvozi v Excel datoteko z informacijami o času
nastopa alarma, času potrditve in času njegovega prenehanja. Možno je tudi neposredno
tiskanje. Uporabnik ima možnost ustvarjanja novih alarmnih sporočil za vse točke in statuse,
ki jih spremlja v sistemu. Pri tem je mogoče dodeliti skupino, ime, podati opis in določiti
prioritete.
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
67
5 ZAGONSKI ELABORAT PROJEKTA
Zagonski elaborat projekta je končni dokument faze priprave projekta. S potrditvijo elaborata
nadrejeni v združbi potrdijo mejnike projekta, način izvedbe, proračun projekta, razmerja med
udeleženci, njihove vloge itd. Formalna potrditev se običajno izvede na predstavitvenem
sestanku.
5.1 Projekt kot proces
Po Hauc (2007) je projekt časovno omejen proces, star toliko kot človeštvo, in trdimo lahko,
da je star toliko časa, kolikor poznamo ustvarjalnost. Človek je največ dosegel s pomočjo
enkratnih in časovno omejenih procesov, ne glede na to, na katero področje človeškega
delovanja se to nanaša. Pojem projekt lahko ima v praksi zelo različne pomene. Tako pomeni
na primer:
• dokumentacijo, načrt, elaborat,
• tehnično ali drugo dokumentacijo,
• projektno dokumentacijo kot npr. projekt za pridobitev gradbenega dovoljenja, projekt
za razpis, projekt za izvedbo itd.,
• načrt postopka za izvedbo projektnega namena,
• objekt v pripravljalni fazi za gradnjo,
• objekt v gradnji,
• naložbo,
• terminski plan neke zaključene akcije posebnega pomena,
• idejo, namero, pa čeprav še ni izvedena itd. [20]
S projektom dosežemo cilj, ki si ga zastavimo pred njegovo pripravo in izvajanjem. Osnovna
značilnost cilja je, da ga najpogosteje povezujemo s časom, v katerem naj bi ga dosegli.
V bistvu je projekt tudi »pot, ki privede do realizacije končnega produkta«. V splošnem gre
pri vseh projektih za izvajanje logičnega zaporedja aktivnosti, ki segajo od ideje, študije in
zagona projekta, specifikacije zahtev, načrtovanja, razvoja, testiranja, uvedbe, ocenitve
vrednosti/koristi, uporabe in vzdrževanja vse do končne izločitve iz uporabe [22].
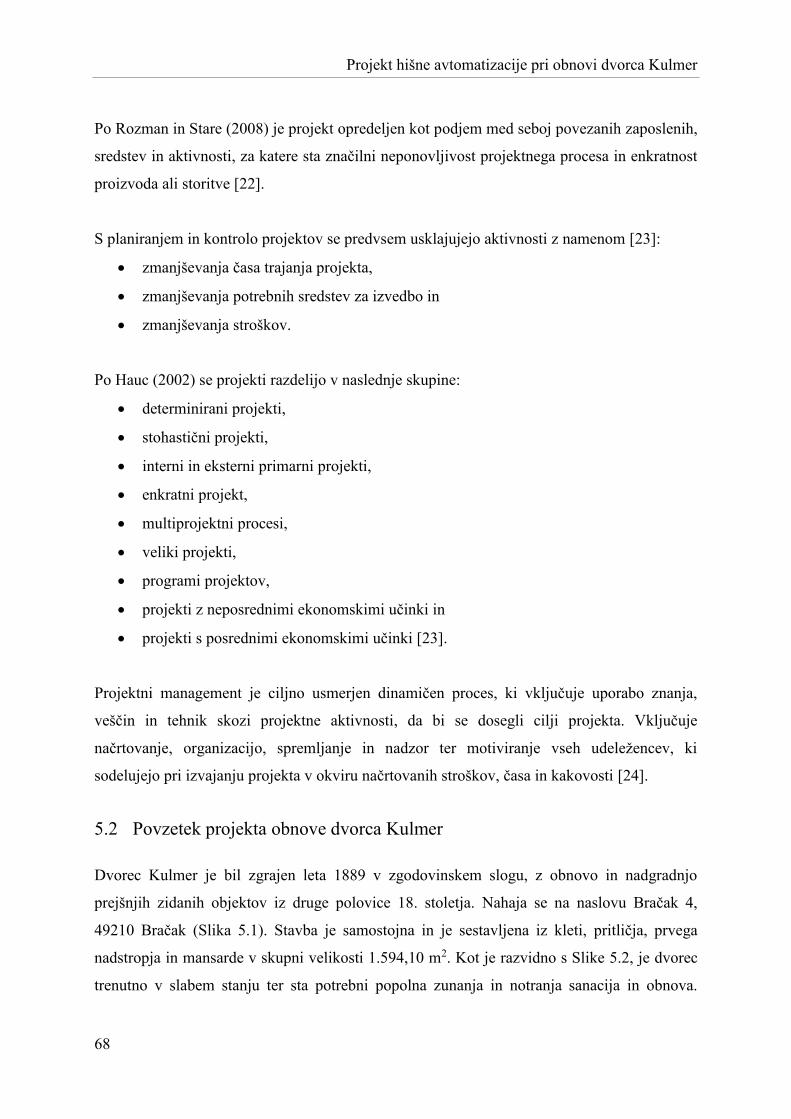
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
68
Po Rozman in Stare (2008) je projekt opredeljen kot podjem med seboj povezanih zaposlenih,
sredstev in aktivnosti, za katere sta značilni neponovljivost projektnega procesa in enkratnost
proizvoda ali storitve [22].
S planiranjem in kontrolo projektov se predvsem usklajujejo aktivnosti z namenom [23]:
• zmanjševanja časa trajanja projekta,
• zmanjševanja potrebnih sredstev za izvedbo in
• zmanjševanja stroškov.
Po Hauc (2002) se projekti razdelijo v naslednje skupine:
• determinirani projekti,
• stohastični projekti,
• interni in eksterni primarni projekti,
• enkratni projekt,
• multiprojektni procesi,
• veliki projekti,
• programi projektov,
• projekti z neposrednimi ekonomskimi učinki in
• projekti s posrednimi ekonomskimi učinki [23].
Projektni management je ciljno usmerjen dinamičen proces, ki vključuje uporabo znanja,
veščin in tehnik skozi projektne aktivnosti, da bi se dosegli cilji projekta. Vključuje
načrtovanje, organizacijo, spremljanje in nadzor ter motiviranje vseh udeležencev, ki
sodelujejo pri izvajanju projekta v okviru načrtovanih stroškov, časa in kakovosti [24].
5.2 Povzetek projekta obnove dvorca Kulmer
Dvorec Kulmer je bil zgrajen leta 1889 v zgodovinskem slogu, z obnovo in nadgradnjo
prejšnjih zidanih objektov iz druge polovice 18. stoletja. Nahaja se na naslovu Bračak 4,
49210 Bračak (Slika 5.1). Stavba je samostojna in je sestavljena iz kleti, pritličja, prvega
nadstropja in mansarde v skupni velikosti 1.594,10 m2. Kot je razvidno s Slike 5.2, je dvorec
trenutno v slabem stanju ter sta potrebni popolna zunanja in notranja sanacija in obnova.
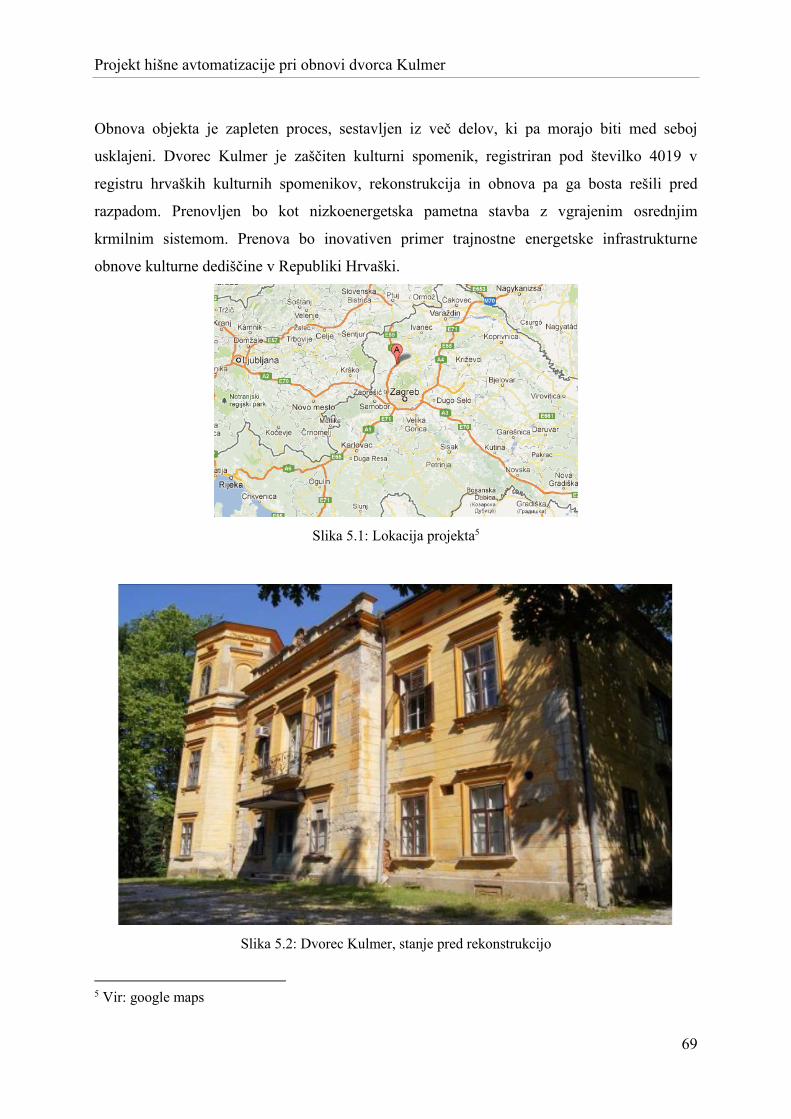
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
69
Obnova objekta je zapleten proces, sestavljen iz več delov, ki pa morajo biti med seboj
usklajeni. Dvorec Kulmer je zaščiten kulturni spomenik, registriran pod številko 4019 v
registru hrvaških kulturnih spomenikov, rekonstrukcija in obnova pa ga bosta rešili pred
razpadom. Prenovljen bo kot nizkoenergetska pametna stavba z vgrajenim osrednjim
krmilnim sistemom. Prenova bo inovativen primer trajnostne energetske infrastrukturne
obnove kulturne dediščine v Republiki Hrvaški.
Slika 5.1: Lokacija projekta5
Slika 5.2: Dvorec Kulmer, stanje pred rekonstrukcijo
5 Vir: google maps

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
70
V magistrskem delu je poudarek na tistem delu projekta, v katerem smo bili udeleženi pri
izvajanju, in je povezan z avtomatizacijo stavbe in osrednjega krmilnega sistema. Sistem
omogoča pametno upravljanje objekta in združuje vgrajene podsisteme v stavbi, kot so sistem
gretja, sistem hlajenja, sistem prezračevanja, razsvetljava in tehnična zaščita. Naše naloge pri
izvajanju projekta so bile povezane z nadzorom del v sodelovanju z vodjo projekta in
usklajevanjem dela v zvezi z inteligentnim sistemom upravljanja zgradbe v skladu z željami
in potrebami naročnika projekta, tj. vlagatelja.
Seznaniti se je bilo treba z možnostmi za inteligentno upravljanje stavb in z načini
komunikacije s pomočjo uporabe sodobnih komunikacijskih tehnologij. Zraven tega pa tudi z
možnostmi sistema in opreme za enoten sistem osrednjega krmiljenja. Takšno vodenje ves čas
zahteva spremljanje različnih informacij, kot so zunanja temperatura, čas, svetloba in vlaga, ki
služijo za prilagoditev sistema HVAC in delovne razsvetljave. S tabelaričnim in z grafičnim
nadzorom potrošnje vseh energentov je mogoče ustvariti pogoje za minimalne obratovalne
stroške z izbiro optimalnega načina dela. To je opisano v evropskem standardu, ki podrobno
opisuje metode ocenjevanja vplivov avtomatizacije objekta glede porabe energije (EN 15232)
»Energetska učinkovitost objekta – Vpliv avtomatizacije, kontrole in upravljanja stavb« [21].
Iz njega je razvidno, da so prihranki pri stroških energije neposredno in tesno povezani s
stopnjo avtomatizacije, ki se izvaja v sistemu stavbe.
5.3 Cilji projekta
Cilje projekta delimo v dve skupini:
• namenski cilji in
• objektni cilji.
Za lažje razumevanje namenskih ciljev odgovarjamo na vprašanje, zakaj sploh izvajamo ta
projekt, kaj želimo doseči s projektom obnove ter kakšne realne rezultate lahko pričakujemo.
Objektne cilje pa lahko poenostavljeno razumemo kot definicijo načina, kako bomo prišli do
uspešnega konca obnove dvorca Kulmer. Objektni cilji izhajajo iz namenskih ciljev in so
zmeraj zelo konkretni.
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
71
Namenski cilji projekta
Namenski cilj 1:
Izdelati potrebno projektno dokumentacijo in skleniti primerne pogodbe z izvajalci del,
nabave opreme in storitve s klavzulami v zvezi s kakovostjo dela, z morebitnimi zamudami in
jamstvom za delo.
Namenski cilj 2:
Integrirati vse elektro in strojne sestavine v sistem samodejnega krmiljenja stavbe − BMS,
funkcionalno prikazati sestavo gretja, hlajenja, ventilacije z možnostjo nadzora in upravljanja.
Namenski cilj 3:
Integrirati in funkcionalno prikazati notranjo in zunanjo razsvetlitev z možnostjo nadzora
upravljanja skozi BMS.
Namenski cilj 4:
Integrirati merilnike porabe energije (elektrika, plin, toplotna energija) in vode v sistem BMS.
Spremljati potrošnjo energentov in vode ter omogočiti pregled potrošnje v tabelarični in
grafični obliki po uri, dnevu, tednu, mesecu z možnostjo samodejnega izpisa potrošnje
določenega dela stavbe.
Namenski cilj 5:
Integrirati in funkcionalno prikazati ter vizualizirati delovanje tehnične zaščite v sistemu
BMS.
Namenski cilj 6:
Izdelati in definirati vremenske scenarije delovanja vseh vgrajenih elektro in strojnih sestavin
v dogovoru z vlagateljem.
Namenski cilj 7:
Vzpostaviti sistem pošiljanja alarmnih sporočil na e-pošto v primeru kakršnihkoli napak in
nepredvidljivih situacij med delom na vgrajeni opremi.
Namenski cilj 8:
Zmanjšati porabo energentov na način pametnega upravljanja in povečati udobje uporabnikov
objekta.
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
72
Objektni cilji projekta
Objektni cilj 1:
Izbor profesionalnega projektnega tima in priprava celotne projektne dokumentacije.
Objektni cilj 2:
Pridobiti vsa ustrezna dovoljenja in gradbeno dovoljenje.
Objektni cilj 3:
Uspešno izvesti javno nabavo, ki vključuje izbor najboljšega izvajalca in pravočasno dobavo
materiala in opreme.
Objektni cilj 4:
Usklajevanje dela po privzetih dejavnostih in urniku ter motiviranje projektne skupine.
Objektni cilj 5:
Zagotoviti kakovosten nadzor dela in dobavljanja opreme.
Objektni cilj 6:
Demontirati stare električne inštalacije in vgraditi nove pametne inštalacije (kabli, delilne
omare, ostala oprema), ki temelji na KNX.
Objektni cilj 7:
Vgraditi, inštalirati in povezati vse strojne sestavine, naprave in opremo projekta, ki vključuje
kotlovnico na pelete, sistem hlajenja, prezračevalni sistem in ostale naprave.
Objektni cilj 8:
Namestitev in priključitev merilnikov električne energije, vode, plina in toplotne energije za
namen oddaljenega spremljanja potrošnje v sistemu BMS.
Objektni cilj 9:
Namestitev in priključitev zaščitnega tehničnega sistema, ki združuje sistem videonadzora in
protivlomni sistem.
Objektni cilj 10:
Integrirati, programirati in vizualizirati celoten sistem BMS v skladu z zahtevami uporabnika,
v sodelovanju s programerji in strokovnjaki s področja avtomatizacije.
Objektni cilj 11
Individualno in skupno testirati delovanje in funkcionalnost vgrajenih sistemov ter pridobiti
uporabno dovoljenje.
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
73
5.4 Projektne aktivnosti
Pripravljalne aktivnosti
Pripravljalne aktivnosti vključujejo razvoj celotne projektne dokumentacije, ki je pogoj za
začetek projekta. Projektna dokumentacija, ki jo je treba izdelati in pridobiti v delu izvajanja
projekta v zvezi s pametnim upravljanjem stavbe, vključuje:
• načrt projekta,
• projekt elektroinštalacije s podrobnim seznamom vseh signalov in komunikacijske
topologije,
• projekt strojne inštalacije,
• projekt tehničnega varovanja,
• oceno stroškov gradnje in opreme.
Upravljanje projekta
Aktivnosti se izvajajo v namen usklajevanja in izvajanja vseh delov projekta v okviru danih
finančnih in časovnih omejitev. Vključuje izvajanje javnih naročil, sklepanje pogodb,
spremljanje izvajanja vseh sporazumov, obvladovanje tveganja ter pripravo faznih in končnih
poročil izvajanja dela.
Ustrezno upravljanje projekta med njegovim izvajanjem je v območju odgovornosti projektne
skupine. V okviru projektnega vodenja bodo potekala srečanja s projektnimi partnerji kakor
tudi interni sestanki članov tima za upravljanje projekta ter srečanja z izvajalci. V okviru teh
srečanj projektna skupina ocenjuje napredek projekta in podaja nadaljnje ukrepanje. Tudi na
sestankih bo tema, kako se izogniti morebitnim težavam in tveganjem.
Projektna skupina je odgovorna za izdelavo faznih poročil vlagatelju o napredku projekta v
skladu s pogodbo o financiranju ter za izdelavo končnega poročila. Na ta način se zagotavlja
ustrezno upravljanje s tveganji in pravočasna izvedba projekta v okviru proračuna glede na
finančne omejitve.
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
74
Izvajanje javnih naročil
Aktivnost izvajanja javnih naročil vključuje pripravo dokumentov za ponudbe ter izvajanje
procedur javne nabave za izvajalna dela, ponudbo in nabavo materiala ter opreme.
Postopek javne nabave prične in vodi vodja projekta s pomočjo članov projektnega tima ter
po potrebi strokovnjakov, zadolženih za javno nabavo. Te osebe pripravijo dokumentacijo za
razpis natečaja za javno naročilo za vse faze izvedbe projekta ter izvajajo javno naročilo po
obstoječih predpisih o javni nabavi v Republiki Hrvaški. Po prejemu ponudb s strani
ponudnikov nosilci aktivnosti s pomočjo strokovnjakov iz projektnega tima analizirajo prejete
ponudbe in izberejo najboljšega ponudnika. Za opremljanje se izbere najugodnejši dobavitelj
za določen sklop opreme v skladu s projektom za opremljanje in tehničnimi specifikacijami.
Po procesu evaluacije se podpisujejo pogodbe z izbranimi izvajalci, dobavitelji opreme in s
ponudniki storitev.
Aktivnosti, povezane s izvajanjem
Aktivnosti se izvajajo z namenom implementacije sistema nadzora in upravljanja objekta, ki
ga projekt pokriva. Aktivnosti vključujejo vsa predvidena gradbena dela in dela v zvezi z
elektrotehničnimi instalacijami, strojnimi inštalacijami in programerska dela.
Elektrotehnične instalacije:
• demontaža obstoječe inštalacije,
• priključek na mrežo NN,
• dobava in montaža novih elektroinštalacij ter vgradnja in opremljanje razdelilnih
omaric, ki temeljijo na protokolu KNX,
• dobava in montaža elektrotehnične opreme,
• gradbena dela, potrebna za izvajanje elektroinštalacijskih del.
Strojne inštalacije:
• dobava, vgradnja in ožičenje novih strojnih inštalacij z vso pripadajočo opremo
(elektro-krmilne omare, ventili, črpalke),
• dobava in montaža ogrevalnega sistema z vso pripadajočo opremo,
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
75
• dobava in montaža hladilnega sistema z vso pripadajočo opremo,
• dobava in montaža prezračevalnega sistema z vso pripadajočo opremo.
Tehnična zaščita:
• dobava in montaža sistema videonadzora,
• dobava in montaža protivlomnega sistema.
Merilniki porabe:
• dobava, montaža, spajanje in zagon opreme z vsemi potrebnimi manjšimi montažnimi
deli in materialom do doseganja polne funkcionalnosti,
• dobava, montaža, spajanje merilnikov električne energije,
• dobava, montaža, spajanje merilnikov toplotne energije,
• dobava, montaža, spajanje merilnikov vode,
• dobava, montaža, spajanje merilnikov plina.
Sistem samodejnega krmiljenja stavbe (BMS):
• programiranje in zagon inštalacij KNX ter njihova integracija in vizualizacija v
sistemu za upravljanje BMS,
• programiranje in zagon sistema HVAC ter integracija in vizualizacija v sistemu za
upravljanje BMS,
• integracija in vizualizacija merilnikov porabe v sistemu za upravljanje BMS,
• integracija in vizualizacija sistema tehnične zaščite v sistemu za upravljanje BMS,
• programiranje, vizualizacija in zagon nadzornega krmilnega sistema BMS do
doseganja popolne funkcionalnosti,
• usposabljanje uporabnika.
Nadzor projekta
Nadzor projekta zajema spremljane projekta v regularnih časovnih intervalih s ciljem
pridobivanja informacij o stopnji zaključka, stroških in rokih. Zbrane informacije se
dokumentirajo v poročila, ki služijo nadzoru napredka projekta in zaznavi odstopanja od

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
76
plana. Bolj kot je projekt pod nadzorom, manjša je možnost tveganja izvedbe projekta. Zaradi
tega je treba implementirati uravnoteženi sistem nadzora.
Storitve inženiringa nadzora so zelo pomemben del projekta, saj se nanašajo na koordinacijo
in nadzor izvajanja del. Projektantski in gradbeni nadzor jih zagotavlja skladno z zakonom in
s predpisi Zakona o gradnji Republike Hrvaške. V gradbenem nadzoru so vključeni nadzorni
strokovnjaki vseh strok. Vključujejo nadzor nad opravljanjem vseh del pri prenovi, skladno s
stroko. Vsa dela se morajo izvajati v skladu z »Zakonom o prostornom uređenju i građenju«
(NN br. 76/2007 in 50/2012). Inženiring in nadzor se zaključita s tehničnim pregledom,
zagonom in s pridobitvijo uporabnega dovoljenja.
5.5 Terminski plan
S pripravljanjem terminskega plana kot iterativnim procesom določamo planirane začetne in
končne datume za projektne aktivnosti. Terminski plan kaže časovni okvir in medsebojno
odvisnost večjih aktivnosti, ki so potrebne za izvedbo projekta in realizacijo ciljev. Med
potekom in napredovanjem projekta se ves čas nadaljuje s tem procesom. Vsebuje planirani in
končni datum za vsako planirano aktivnost. Z dobro izdelanim terminskim planom se lahko
močno vpliva na stroške projekta, izboljša se kakovost in motiviranost, projekt pa se lahko
izvede v planiranem roku.
V procesu ocenjevanja trajanja planiranih aktivnosti uporabljamo informacije o obsegu dela
planiranih aktivnosti in potrebnih vrstah virov. Vložke za ocene trajanja planiranih aktivnosti
pridobivamo od osebe ali skupine v projektnem teamu, ki je najbolj seznanjena z naravo
vsebine dela v konkretni planirani aktivnosti. Trajanje se ocenjuje s postopno podrobno
obdelavo, v procesu pa se upošteva kakovost in razpoložljivost vstopnih podatkov. Z več
podrobnih in natančnih podatkov se izboljšuje tudi točnost ocenjevanja trajanja.
Terminski plan obnove dvorca Kulmer je prikazan v Tabeli 5.1. Terminski plan se nanaša na
celotni projekt, ki je sestavljen iz pripravljalnega in izvedbenega dela. Najboljši ponudniki, ki
so bili izbrani na osnovi postopka javne nabave, so imeli na razpolago 14 mesecev za
izvajanje del. Projekt se je začel 1. 9. 2012, predvideni konec projekta pa je bil 28. 10. 2016.

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
77
Zaradi nekaterih nepredvidenih del med obnovo projekta, natančneje sanacije kapilarne vlage,
ter potrebe po izboljšanju hidroizolacije vlage tal in odpravljanja šibkih točk v sistemu
samodejnega krmiljena stavbe je projekt je trajal dlje kot pričakovano.
S kontroliranjem terminskega plana obravnavamo naslednje postavke:
• določamo trenutni status terminskega plana,
• vplivamo na dejavnike, ki povzročajo rokovne spremembe,
• ugotavljamo, da se je terminski plan projekta spremenil,
• obvladujemo dejanske spremembe, ko nastanejo.
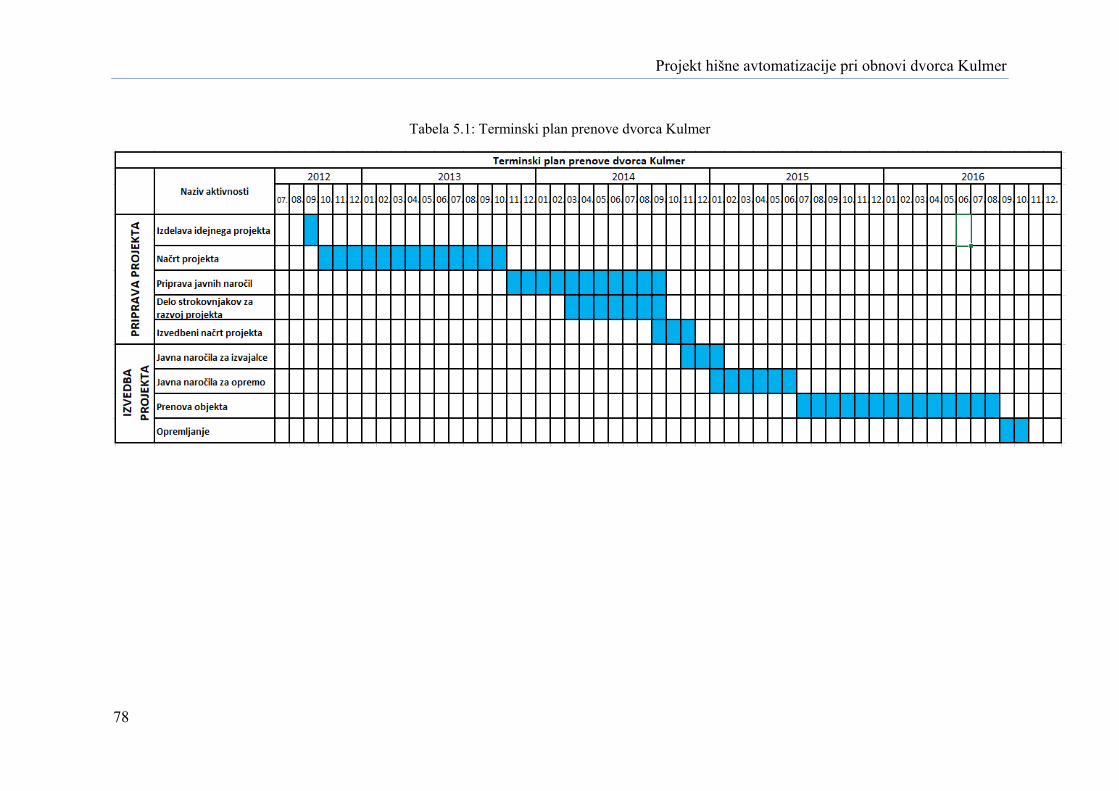
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
78
Tabela 5.1: Terminski plan prenove dvorca Kulmer
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
79
5.6 Projektno vodenje
Projektno vodenje je uporaba znanja, veščin, orodja in tehnik v aktivnostih projekta, da se
izpolni zahteve projekta. Projektno vodenje je uspešno izvedeno s procesi, ki sprejemajo
vložke in generirajo izhode, pri tem pa uporablja znanje, spretnosti, orodja in tehnike
projektnega vodenja.
Da bi bilo projektno vodenje uspešno, mora projektni tim:
• izbrati ustrezne procese, ki so potrebni za doseganje ciljev projekta,
• delovati skladno z zahtevami, da izpolni potrebe, želje in pričakovanja naročnika
projekta,
• iskati ravnovesje med konkurenčnimi zahtevami obsega, časa, stroškov, kakovosti,
virov in tveganj.
Odgovornost projektnega vodenja je dokumentiranje informacij, ki so potrebne, da se projekt
zažene, planira, izvede, kontrolira in zaključi. To zahteva integrirano delovanje, integracija pa
zahteva, da je vsak projektni proces ustrezno usklajen in povezan z drugimi procesi, kar olajša
njihovo koordinacijo.
Projektni vodja imenuje nadzornega inženirja izvajanja del, tj. odgovorno osebo, ki vodi
gradnjo oz. dele prenove. Zraven tega je nadzorni inženir odgovoren za medsebojno
usklajenost izvajalnih del, usklajuje pa izvajanje predpisov, ki urejajo varnost in zdravje
delavcev v času gradbenih del. Nadzorni inženir mora biti oseba, ki izpolnjuje pogoje za
opravljanje dela v skladu z zakonom.
Izvajalec je dolžan izvajati dela v skladu s prvotno projektno dokumentacijo, tehničnimi
predpisi, posebnimi predpisi, pravili in istočasno:
• opraviti delo tako, da so izpolnjene zahteve projekta,
• kontrolirati gradbene in druge proizvode v skladu z Zakonom o gradnji objektov,
• zagotoviti dokaze o značilnostih vgrajenih elektrotehničnih in mehanskih proizvodov
v zvezi z njihovimi bistvenimi lastnostmi, zagotoviti tudi dokazilo o odobritvi opreme
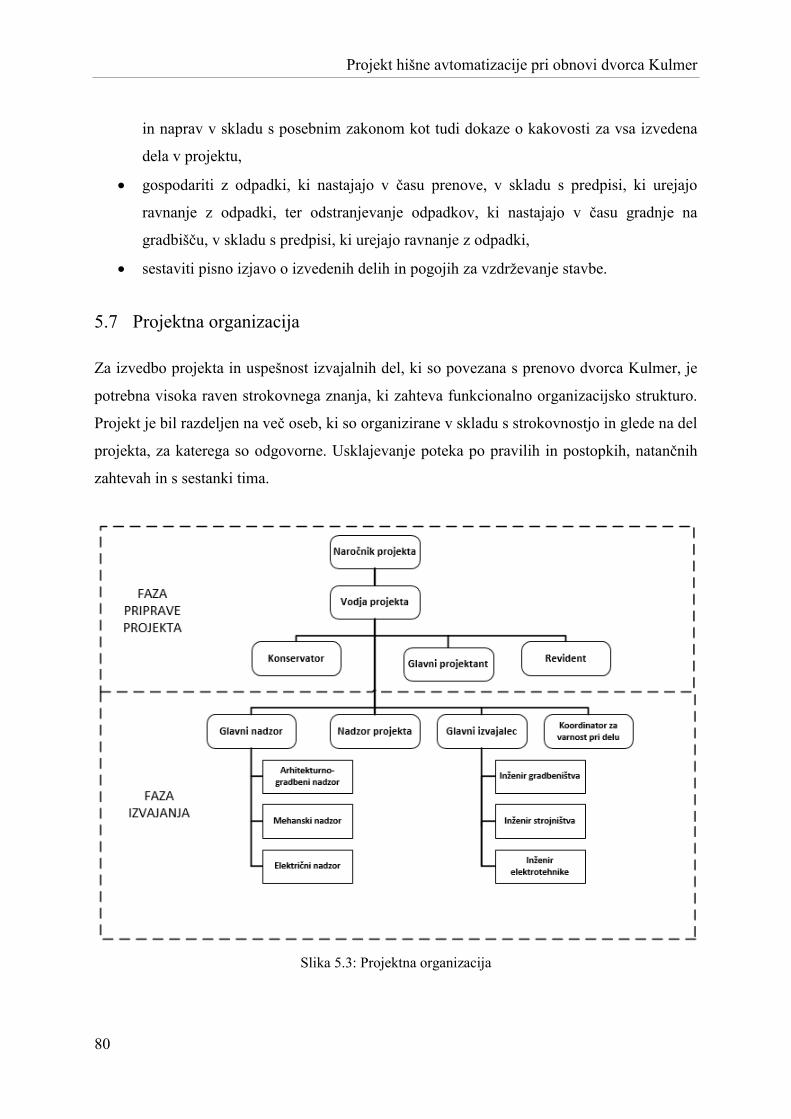
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
80
in naprav v skladu s posebnim zakonom kot tudi dokaze o kakovosti za vsa izvedena
dela v projektu,
• gospodariti z odpadki, ki nastajajo v času prenove, v skladu s predpisi, ki urejajo
ravnanje z odpadki, ter odstranjevanje odpadkov, ki nastajajo v času gradnje na
gradbišču, v skladu s predpisi, ki urejajo ravnanje z odpadki,
• sestaviti pisno izjavo o izvedenih delih in pogojih za vzdrževanje stavbe.
5.7 Projektna organizacija
Za izvedbo projekta in uspešnost izvajalnih del, ki so povezana s prenovo dvorca Kulmer, je
potrebna visoka raven strokovnega znanja, ki zahteva funkcionalno organizacijsko strukturo.
Projekt je bil razdeljen na več oseb, ki so organizirane v skladu s strokovnostjo in glede na del
projekta, za katerega so odgovorne. Usklajevanje poteka po pravilih in postopkih, natančnih
zahtevah in s sestanki tima.
Slika 5.3: Projektna organizacija

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
81
5.8 Obvladovanje tveganj projekta
Obvladovanje tveganj projekta vsebuje procese, povezane s planiranjem obvladovanja
tveganj, prepoznavanjem, z analiziranjem, odzivanjem, s spremljanjem in kontroliranjem
tveganj v projektu. Večina teh procesov se dopolnjuje ves čas trajanja projekta. Cilji
obvladovanja tveganj projekta so povečanje verjetnosti in vpliva pozitivnih dogodkov
tveganja ter zmanjševanje verjetnosti in vpliva dogodkov tveganja, ki so nenaklonjeni
projektu.
Tveganje projekta je negotov dogodek ali stanje, ki ima, če se pojavi, pozitiven ali negativen
vpliv na najmanj en projektni cilj, npr. na čas, stroške, obseg ali kakovost. Tveganje lahko
ima enega ali več vzrokov in če se pojavi, tudi enega ali več vplivov. Izhaja iz negotovosti, ki
je opazna v vseh projektih. Znana tveganja so tista, ki smo jih prepoznali in analizirali ter za
katera je moč izdelati plan s procesi. Pazljivo in razumljivo planiranje povečuje možnosti za
uspeh projekta. Udeleženci v aktivnostih za prepoznavanje tveganj so po potrebi naslednji:
projektni vodja, člani projektnega tima, strokovnjaki za posamezna področja zunaj
projektnega tima in udeleženci projekta. Planirane odzive na tveganja v planu za
obvladovanje projekta izvajamo ves čas izvajanja projekta. S procesom spremljanja in
kontroliranja tveganj prepoznavajo, analizirajo in planirajo novo nastala tveganja, sledijo že
prepoznana tveganja in tveganja na opozorilnem spisku, nato analizirajo obstoječa tveganja.
Procesi za obvladovanje tveganj projekta so:
• planiranje obvladovanja tveganj,
• prepoznavanje tveganj,
• kvalitativna analiza tveganj,
• kvantitativna analiza tveganj,
• planiranje odzivov na tveganja,
• spremljanje in kontroliranje tveganj.
Za posamezne dele projekte smo dodali tveganja glede na njihove specifike (Tabela 5.2).
Ocena tveganja vključuje vse projektne dejavnosti. Posamezni dejavniki tveganja so ocenjeni
za verjetnost pojavljanja v odvisnosti od naslednje metodologije:
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
82
• verjetnost pojava (VN),
• vpliv na projektne aktivnosti (UA),
• splošni dejavnik tveganja (ORF = VN * UA).
Vsako tveganje se ocenjuje skozi 3 stopnje:
• L – nizko tveganje (pridružuje se mu število 1),
• M – srednje tveganje (pridružuje se mu število 2),
• H – visoko tveganje (pridružuje se mu število 3).
Na podlagi pridobljenih podatkov je izračunana povprečna ocena vseh dejavnikov tveganja:
• nizko tvegan (povprečna ocena 1–1,65),
• srednje tvegan (povprečna ocena 1,66–2,32),
• visoko tvegan (povprečna ocena 2,33–3).
Upravljanje s tveganji je kompleksen proces, včasih z verižno reakcijo dogodkov, ki bi lahko
privedli do pojava novih tveganj. Za vsako tveganje za zagotavljanje preventivnih in
veljavnih ukrepov se prepreči nastanek nevarnosti ali zmanjšajo njene posledice.

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
83
Tabela 5.2: Analiza tveganj pri obnovi dvorca Kulmer
Št. Tveganje Aktivnosti zmanjševanja tveganj
Zgodnji indikator opozoril
Kdo je odgovoren za spremljanje tveganj
Verjetnost tveganja (H/M/L)
Vpliv na projektne aktivnosti (H/M/L)
Splošni faktor tveganja (H/M/L)
FT1
Tveganje
pridobivanja
dokumentacije
Vključitev odgovornih
državnih organov v projekt Tehnične težave
REGEA,
vodja projekta L (1) M (2) M (2)
FT2
Pomanjkanje sredstev za sofinanciranje projekta
Kredit, optimizacija projekta
Naraščajoči stroški
REGEA, vodja projekta
L (1) M (2) M (2)
FT3 Zagotovljena likvidnost
Predfinanciranje − dogovor z ministrstvom, zagotavljanje sredstev v proračunu, kredit
Nezmožnost plačila tekočih stroškov
REGEA, finančni vodja
M (2) H (3) H (3)
FT4
Povečanje investicijskih stroškov, investicijsko upravljanje s stroški
Redno mesečno finančno spremljanje, nadzor kakovosti izvajanja projekta
Nepredvidena dela
REGEA, glavni nadzorni inženir in vodja projekta
L (1) M (2) M (2)
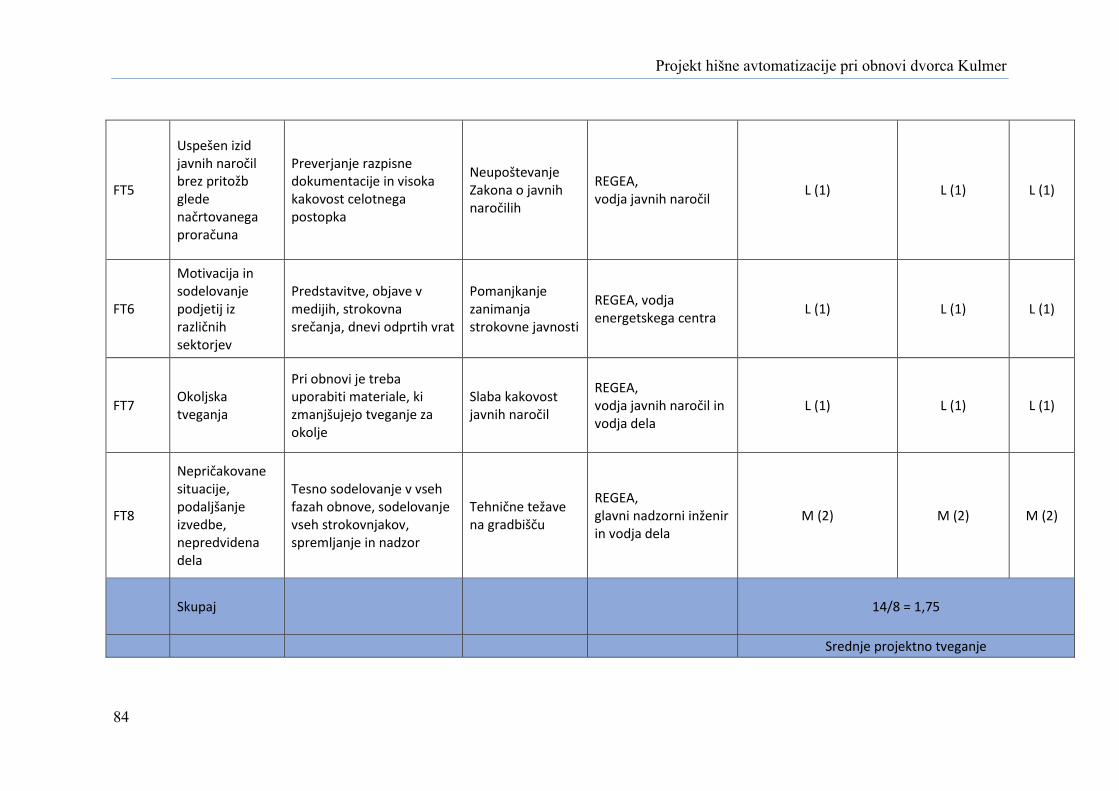
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
84
FT5
Uspešen izid javnih naročil brez pritožb glede načrtovanega proračuna
Preverjanje razpisne dokumentacije in visoka kakovost celotnega postopka
Neupoštevanje Zakona o javnih naročilih
REGEA, vodja javnih naročil
L (1) L (1) L (1)
FT6
Motivacija in sodelovanje podjetij iz različnih sektorjev
Predstavitve, objave v medijih, strokovna srečanja, dnevi odprtih vrat
Pomanjkanje zanimanja strokovne javnosti
REGEA, vodja energetskega centra
L (1) L (1) L (1)
FT7 Okoljska tveganja
Pri obnovi je treba uporabiti materiale, ki zmanjšujejo tveganje za okolje
Slaba kakovost javnih naročil
REGEA, vodja javnih naročil in vodja dela
L (1) L (1) L (1)
FT8
Nepričakovane situacije, podaljšanje izvedbe, nepredvidena dela
Tesno sodelovanje v vseh fazah obnove, sodelovanje vseh strokovnjakov, spremljanje in nadzor
Tehnične težave na gradbišču
REGEA, glavni nadzorni inženir in vodja dela
M (2) M (2) M (2)
Skupaj
14/8 = 1,75
Srednje projektno tveganje

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
85
Vrednotenje tveganja
V skladu z evropsko direktivo za vse velike infrastrukturne projekte je treba izdelati tudi
vrednotenje tveganja. To je sestavljeno iz proučevanja verjetnosti, da bo projekt dosegel
zadovoljive rezultate. V tem poglavju želimo identificirati ključne spremenljivke tveganja,
katerih razlika (pozitivna ali negativna) ima največji vpliv na uspešnost prenove dvorca
Kulmer. Vrednotenje tveganja je vrednotenje verjetnosti, da projekt ne bo dosegel zadanih
ciljev.
Vrste tveganj, ki se lahko pojavijo pri izvedbi projekta, se lahko razdelijo na:
• tveganje razvoja,
• tveganje za čas prenove objekta,
Vrednotenje tveganj, ki se lahko pojavijo pri izvedbi projekta, se deli na:
• 1 (nizko tveganje),
• 2 (srednje tveganje),
• 3 (visoko tveganje).
Tveganje razvoja
Tveganje je večinoma prisotno v primerih projektne in investicijske dokumentacije,
dokumentacije s področja zaščite okoliša, planske dokumentacije in tehnične dokumentacije.
Dejavniki, ki vplivajo na tveganje, so povezani z volumnom in vrednostjo naložbe, s
kompleksnostjo naložbe, z lokacijo naložbe in z zakonodajo.
Dejavniki, ki vplivajo na tveganja, povezana s pridobivanjem odobritve, so: kriteriji in pogoji
za gradbena dela, tveganja iz prostorno-planske dokumentacije, lastništva nad zemljiščem,
vrsta gradnje in drugih del kot tudi namembnost zgradbe itd. Projekt je dobil oceno 2
(srednje tveganje).
Tveganje v času prenove objekta
Dejavniki, ki vplivajo na tveganje, povezano z gradnjo objekta, so: zanesljivost izvajalca,
število podizvajalcev in finančna stabilnost naročnikov projekta. Pri izboru izvajalca in
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
86
podizvajalca se zahteva dokaz o kvalificiranosti za določeno vrsto in obseg del. Večja
zanesljivost izvajalca in manjše število podizvajalcev vplivata na manjše tveganje za
vlagatelja. Dejavnik, povezan s tveganjem financiranja projekta, je tudi, če ima vlagatelj
dovolj finančnih sredstev, da lahko sam nadomesti izgubo sredstev. Nevarnost za okolico se
nanaša na negativen učinek naložbe na okolje kakor tudi na spremembe v zakonodaji in
standardih na področju zaščite okolja. Dejavniki, ki vplivajo na tveganje uspešnega prevzema
stavbe, so: vrsta objekta, izkušnje izvajalca projekta in izkušnje vlagatelja. Projekt je dobil
oceno 2.
Vrednotenje tveganja potrjuje, da ima obnova dvorca Kulmer srednje tveganje projekta.
Glavna tveganja so povečanje investicijskih stroškov in pomanjkanje finančnih sredstev za
sofinanciranje projekta ter neplanirana dela. Predpostavke trajnosti po izvajanju so stabilna
ekonomska situacija na Hrvaškem ter da prioritete razvoja regionalnega gospodarstva ostajajo
osredotočene na inovacije, tehnologije in znanje s področja podjetništva.
5.9 Ekonomika projekta
Z ekonomiko projekta izračunamo, ali se obnova dvorca, v katerem se planira izgradnja
Energetskega centra Bračak, izplača. Obnova dvorca Kulmer zahteva kompletno energetsko
obnovo objekta, natančneje nadgradnjo objekta iz energetskega razreda F v energetski razred
B. V izračun je vzeta celotna naložba obnove z vsemi potrebnimi deli.
Da bi se pri realizaciji projekta lahko čim bolj izkoristile dostopne finančne podpore iz
evropskih skladov, je treba pripraviti projektno dokumentacijo skladno z zahtevami in s
priporočeno metodologijo EU. Ključni dokument v pripravi takih projektov je študija
izvedljivosti ter analiza koristi in stroškov (angl. Cost-Benefit Analysis − CBA), v kateri se
podrobno in po predpisani metodologiji analizirajo vse koristi in stroški projekta ter se
demonstrira njegova upravičenost za financiranje iz skladov EU.
CBA-analiza je sestavljena iz finančne analize stroškov in koristi ter ekonomske analize
stroškov in koristi. Namen finančne analize je vrednotenje denarnega toka projekta ob
ustrezni ravni prihodka. Namen ekonomske analize pa je, da se ugotovi ekonomsko

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
87
upravičenost projekta z izračunom dodatne koristi za družbo kot celoto. Z navedenima
analizama se izračunava neto sedanja vrednost projekta − NSV (finančna in ekonomska), ki
predstavlja skupno vrednost, zreducirano na prvo leto celotnega trajanja.
Finančna analiza koristi in stroškov
Za finančno analizo stroškov se uporablja analiza finančne sposobnosti podjetja. Za namen
tega izračuna se uporabita finančna neto sedanja vrednost naložbe FNPV(C) v (5.1), in
finančna stopnja povračila naložbe FRR(C) v (5.2). Ti spremenljivki primerjata stroške
naložbe z neto prihodki in mero sposobnosti neto prihodkov za poplačanje naložbe ne glede
na izvor in metodo financiranja. FNPV(C) je definirana kot znesek, ki nastane, ko se
predvideni stroški naložbe in operativni stroški projekta (diskontirani) odvzamejo od
diskontirane vrednosti pričakovanih prihodkov:
• finančna interna stopnja rentabilnosti (FRR(C)),
• FNPV(C),
• čas povračila naložbe,
• finančna relativna NSV in
• finančno razmerje relativne koristnosti.
Tabela 5.3: Finančna donosnost naložbe
Finančna interna stopnja rentabilnosti (FRR(C)) −17,11 %
Finančna neto sedanja vrednost (FNPV(C)) −2.928.871,00 EUR
Obdobje donosnosti naložbe Ne vrača se
neposredno
Finančna relativna neto sedanja vrednost −0,953
Finančno razmerje relativne uporabnosti 0,541
𝐹𝑁𝑃𝑉(𝐶) =∑𝑎𝑡𝑆𝑡
𝑛
𝑡=0
=𝑆0
(1 + 𝑖)0+
𝑆1(1 + 𝑖)1
+⋯+𝑆𝑛
(1 + 𝑖)𝑛
(5.1)
Pri tem je: St stanje denarnega toka v času t, at finančni diskontni faktor, izbran za
diskontiranje v času t, in i je finančna diskontna stopnja.
Finančna stopnja donosnosti naložbe je definirana kot diskontna stopnja, ki daje FNPV = 0, tj.
FRR (finančna donosnost naložbe), ki jo izračunamo s pomočjo naslednje enačbe.
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
88
0 =∑𝑆𝑡
(1 + 𝐹𝑅𝑅(𝐶))𝑡
(5.2)
Finančna neto sedanja vrednost je −2.928.871,00 EUR, finančna relativna neto sedanja
vrojenost pa −0,953. Zaradi negativnih predznakov vrednosti projekt ni finančno primeren.
Finančna relativna koristnost, ki predstavlja razmerje med sedanjo vrednostjo vseh koristi in
sedanjo vrednosti vseh stroškov, je 0,541. To pokaže, da so stroški naložbe višji od prihodkov
oziroma prihodki ne morejo v celoti pokriti stroškov, posledično pa je naložba finančno
neupravičena.
Družbeno-ekonomska analiza
Namen družbeno-ekonomske analize stroškov in koristi je opredelitev ekonomske odzivnosti
projekta s preračunavanje ostalih dodatnih koristi kot utemeljitev rezultata izvedbe projekta.
Projekt ima namreč različne posredne ekonomske, socialne, gospodarske in družbene učinke.
Naložbe v projekt se tako lahko pravilno precenijo le v primeru, ko se upošteva tudi ostale
posredne učinke, saj so slednji lahko mnogokrat tudi razlog za zagon projekta [25].
Z ekonomsko analizo se ocenjuje prispevek projekta k severozahodni regiji Hrvaške. Na
izvajanje projekta je treba gledati v širšem kontekstu, in sicer z analizo koristnih učinkov na
celotno družbo in ne le na lastnika infrastrukture, kot se to počne pri finančni analizi.
Ekonomska ocena projekta se meri z ekonomsko interno stopnjo donosnosti naložbe (ERR) in
s primerno finančno neto sedanjo vrednostjo (ENPV) ter z ekonomskim razmerjem med
koristmi in stroški (B/C).
Da bi projekt bil ocenjen kot upravičljiv in da bi lahko postal kandidat za sofinanciranje s
strani EU, mora biti ENPV v (5.3) pozitivna, ERR v (5.4) mora biti večja od predpostavljene
ekonomske diskontne stopnje, razmerje B/C pa mora biti večje od 1. Elementi ekonomskih
stroškov vključujejo korigirane investicijske stroške in operativne stroške ter eksterne
ekonomske stroške. Elementi ekonomskih koristi vključujejo korigirane finančne prihodke,
preostalo vrednost projekta ter eksterne ekonomske koristi.
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
89
Kot izhodišče za ekonomsko analizo se štejejo denarni tokovi iz finančne analize ob
določenih popravkih, vključno s fiskalnimi popravki, popravki razmerja med koristmi in
stroški ter popravki cen na trgu s pomočjo faktorja pretvorbe.
Pokazatelji ekonomskih učinkov so:
• ekonomska interna stopnja rentabilnosti (ERR),
• ekonomska neto sedanja vrednost (ENPV),
• ekonomska doba odplačevanja,
• ekonomska relativna neto sedanja vrednost,
• ekonomsko razmerje med koristmi in stroški.
Tabela 5.4: Kazalniki ekonomskih vplivov
Ekonomska interna stopnja rentabilnosti (ERR) 9,21 %
Ekonomska neto sedanja vrednost (ENPV) 884.794,00 EUR
Ekonomska doba odplačevanja 11,9 leta
Ekonomska relativna neto sedanja vrednost 0,288
Ekonomsko razmerje med koristmi in stroški 1,14
𝐸𝑁𝑃𝑉 =∑𝑎𝑡𝑆𝑡
𝑛
𝑡=0
=𝑆0
(1 + 𝑖)0+
𝑆1(1 + 𝑖)1
+⋯+𝑆𝑛
(1 + 𝑖)𝑛
(5.3)
0 =∑𝑆𝑡
(1 + 𝐸𝑅𝑅)𝑡
(5.4)
Ekonomska neto sedanja vrednost projekta je 884.794,00 EUR in je pozitivna. Ekonomska
interna stopnja rentabilnosti je 9,21 % in je nad maksimalno vrednostjo 5 %. Ekonomska
relativna neto sedanja vrednost je 0,288. Ekonomsko razmerje koristi in stroškov, ki
predstavlja razmerje med sedanjo vrednostjo vseh koristi in sedanjo vrednostjo vseh stroškov,
je 1,14. To nam pove, da so stroški naložbe nižji od ekonomskih koristi, tj. da je projekt
družbeno sprejemljiv. Povračilo naložb se realizira v 11,9 leta. Kot prikazujejo pridobljeni
pokazatelji, ima naložba pozitivne družbene koristi in je zaradi tega tudi ekonomsko
zanimiva.
Projekt je tako kljub dejstvu, da finančni kazalniki kažejo drugače, učinkovit zaradi širših
družbenih koristi in koristi za okolje, v katerem bo projekt realiziran.

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
90
6 SKLEP
Obnova dvorca Kulmer je inovativen primer obnove objekta pod kulturno dediščino v
Republiki Hrvaški. Objekt, ki je bil zgrajen leta 1889 in se nahaja v ruševinah, se tako
obnavlja kot nizkoenergetska pametna hiša z vgrajenim centralnim krmilnim sistemom.
Čeprav projekt na osnovi finančnih kazalnikov ni ekonomsko upravičen, so z realizacijo
projekta začeli bolj zaradi družbeno-ekonomske upravičenosti in koristi. Obnovljen dvorec bo
Energetsko-izobraževalno predstavitveno središče, kjer bodo tudi pisarne Regionalne
energetske agencije severozahodne Hrvaške, Vzgojno-izobraževalnega centra in inkubacijski
prostor za podjetja s področja energetike, informacijsko-komunikacijskih tehnologij,
obnovljivih virov energije in podobnih dejavnosti. S tem se planira doseči konkurenčnost
podjetij severozahodne Hrvaške na osnovi »pametne« specializacije v regiji in dviga
kompetenc prebivalstva ter ustvariti infrastrukturne predpogoje in inovativno poslovno okolje.
Primeri dobre prakse iz držav Evropske unije kažejo, da tehnologija, inovacije in tržno
usmerjena javna infrastruktura s povezanimi strokovnimi službami lahko predstavljajo
pomembno spodbudo za osnovanje in rast malih in srednje velikih podjetij v določenem
sektorju.
Projekt hišne avtomatizacije, v katerem smo sodelovali in ki je predmet tega dela, je samo del
celotne obnove dvorca Kulmer. Pametni sistem, ki se vgrajuje v objekt in služi za integracijo
sistemov gretja, hlajenja, ventilacije, razsvetljave in tehnične zaščite, ni enostaven koncept,
ker zahteva široko znanje z mnogih tehničnih področij. Iz tega razloga so ključ do uspeha
predvsem kakovostna in temeljita priprava, izdelava projekta in izbor kakovostnega tima
strokovnjakov za nadzor in izvedbo del. Zaradi tega je bilo treba proučiti komunikacijske
protokole hišne avtomatizacije in možnosti integracije opreme v sistem BMS, da bi definirali
cilje in zagotovili kakovosten nadzor del.
Po realizaciji projekta lahko kljub temu, da ima izvajalec del sistema avtomatizacije
kakovostne reference, zaradi katerih je tudi bil izbran na javnem natečaju, zaznamo kakšne
pomanjkljivosti, ki jih je treba odpraviti. Zaradi tega smo v tem delu navedli možnosti za
izboljšave in dodatne optimizacije sistema. Realnost hrvaškega tržišča je, da se trenutno le
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
91
malo podjetij ukvarja s hišno avtomatizacijo, a večina teh nima dovolj izkušenj in znanja.
Vgradnja sistemov hišne avtomatizacije je še vedno relativno draga, vendar so tovrstni sistemi
zagotovo tehnologija prihodnosti, ki se bo v naslednjih letih hitro razvijala.

Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
92
7 VIRI IN LITERATURA
[1] Sauter, T., Dietrich, D., Kastner, W. EIB – Installation Bus System, Munich
Njemačka: Publicis KommunikationsAgentur GmbH GWA, 2001.
[2] ZVEI, Njemačka udruga elektro i informatičkih zanata, Zbornik: Priručnik za
upravljanje kućama i zgrdama, ZVEI, 2006.
[3] IDC Technologies, Data Communications and Networking, Practical, Technology
training that Works, 2010.
[4] Mackay S. Practical Industrial Data Networks: Design, Installation and
Troubleshooting. Newnes: IDC Technology, 2004
[5] Hoentzsch, C., M-Bus Usergroup, Department Physik, 2017 Dostopno na:
http://www.m-bus.com/ [26. 4. 2017].
[6] Hersent, O., Boswarthick, D., Elloumi, O., The Internet of Things: Key Applications
and Protocols. Hoboken: John Wiley & Sons, 2011
[7] KNX Assosiation, KNX Basics,
Dostopno na:http://www.knx.org/media/docs/Flyers/KNX-Basics/KNX-Basics_en.pdf
[15.6.2017.]
[8] KNX Assosiation, Home and Building managment system,
Dostopno na: http://www.knx.org/hr/knx/stambene-zgrade/ [17.6.2017.]
[9] EN 50090 2011. Home and Building Electronic Systems (HBES), European
Commission, 2011
[10] Knok Ž., Trstenjak B., Trstenjak J., Intelligent or smart house. Čakovec: Međumursko
veleučilište Čakovec 2010
[11] KNX Association cvba, KNX Osnovna načela, 5. Izdanje
[12] Merz, H., Hansemann, T., Hübner, C. Building Automation: Communication systems
with EIB/KNX, LON and BACnet. Springer Science & Business Media, 2009
[13] CEN/TC 247 – Building Automation, Control and Building Managment Systems,
European Committee for Standardization, 2016
[14] ISO/TC 205 Building environment design. ANSI, United States, 1992,
Dostopno na: https://www.iso.org/committee/54740.html [26.7. 2017]
Projekt hišne avtomatizacije pri obnovi dvorca Kulmer
93
[15] NETx Automation: Integration of KNX with other technologies and protocols, Verena
Katzlinger, 2016, Dostopno na:
https://www.netxautomation.com:8443/display/BMS20/KNX2%3A+Integration+of+
KNX+with+other+technologies+and+protocols [3.8.2017.]
[16] Kastner W., Neugschwandenter G., Soucek S., and Newman H. M., »Communication
Systems for Building Automation and Control«, Proceedings of the IEEE, vol. 93 no.
6, Junij 2005.
[17] Trend Open Network Node (TONN) Data Sheet TA201127 Issue 10, 15-Apr-2016,
Dostopno na: https://partners.trendcontrols.com/trendproducts/cd/it/pdf/en-te201130-
uk0yr1210.pdf [20.6.2017]
[18] Kyas, O., How To Smart Home: A Step by Step Guide for Smart Homes & Building
Automation, Key Concept Press, 2017
[19] European Commission. Executive Agency for SMEs, Intelligent Energy Europe
European Commission, 2003. Dostopno na: https://ec.europa.eu/energy/intelligent/
[30.7.2017.]
[20] Hauc, A., Projektni managment / Anton Hauc. – 2., spremenjena in dopolnjena izd. -
Ljubljana: GV Založba, 2007
[21] EN 15232. Evropski standardi za energetsku efikasnost zgrada - EN 15232. Dostopno
na: http://grejanje.com/download.php?pID=75 [30.6.2017]
[22] Rozman, R., Stare, A., 2008. Projektni management ali ravnateljevanje projekta.
Ljubljana: Ekonomska Fakulteta.
[23] Hauc, A. Projektni management. Ljubljana: GV Založba, 2002.
[24] Lewis, J. P. Mastering Project Management – appllyng advanced concepts of system
thinking, control and evaluation, resource allocation. New York: McGraw Hill, 1998.
[25] Hauc, A., Vrečko, I. ABC projektnega managementa. Slovenija: EPF in ZPM
(seminar), 2000.
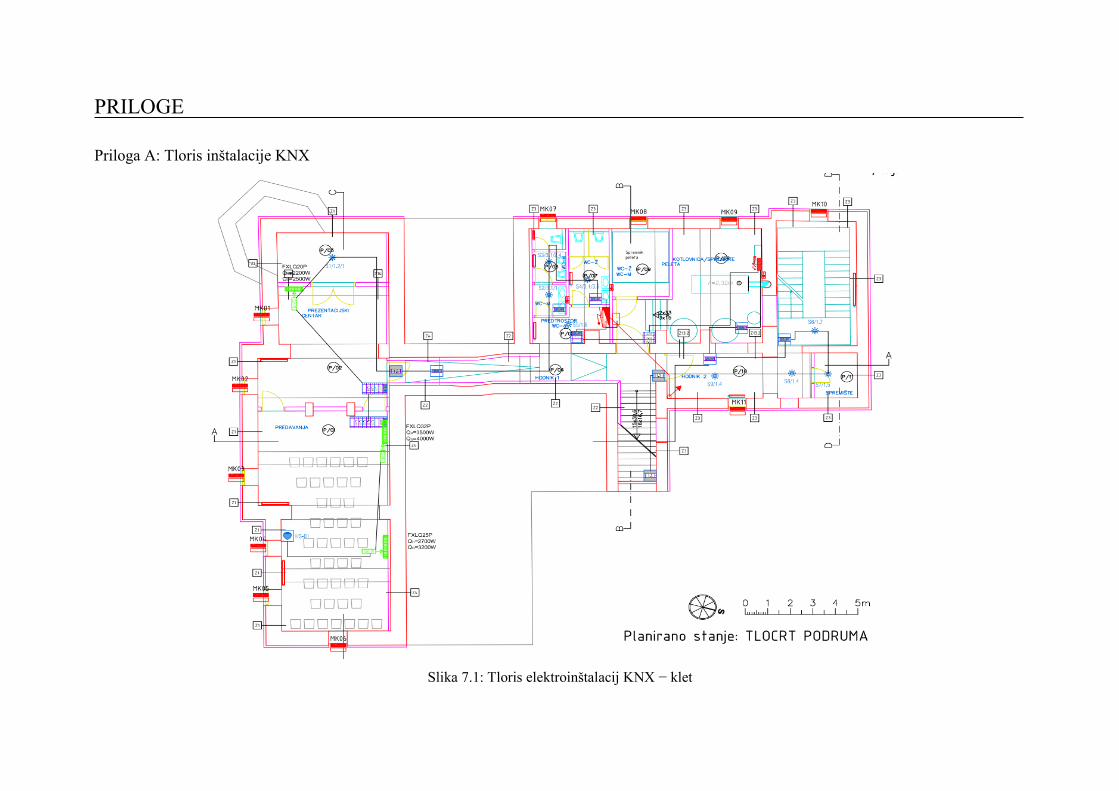
PRILOGE
Priloga A: Tloris inštalacije KNX
Slika 7.1: Tloris elektroinštalacij KNX − klet
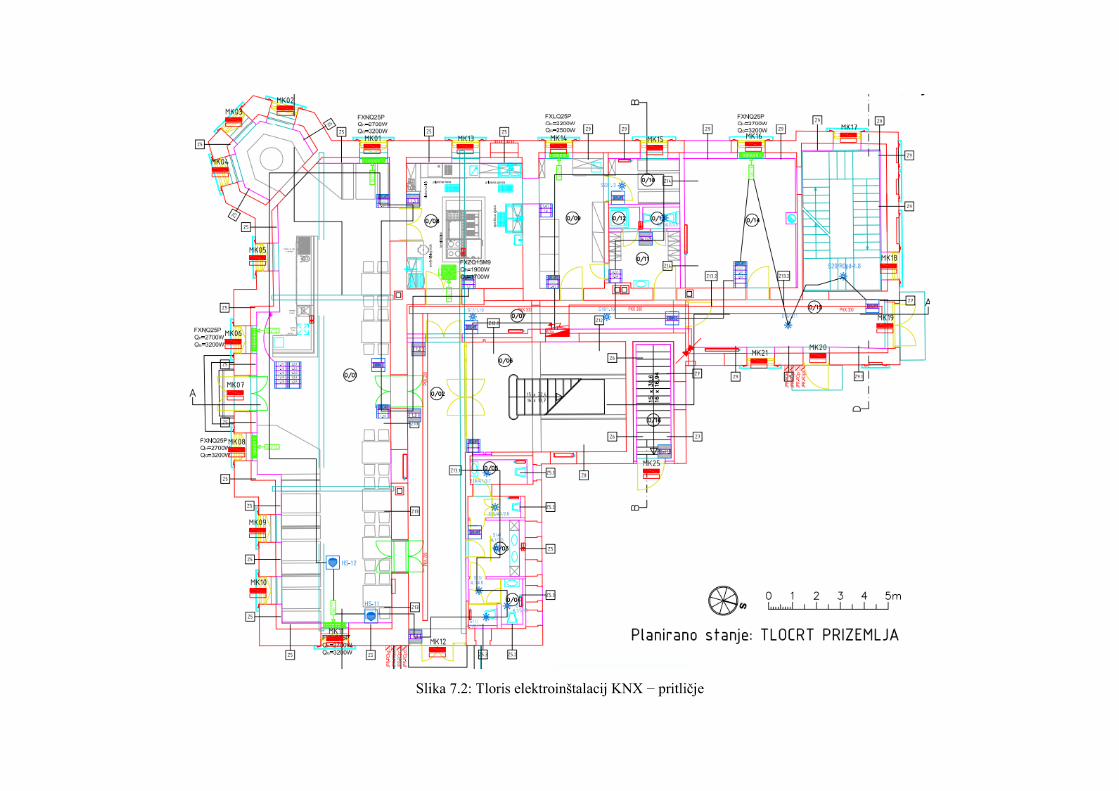
Slika 7.2: Tloris elektroinštalacij KNX − pritličje
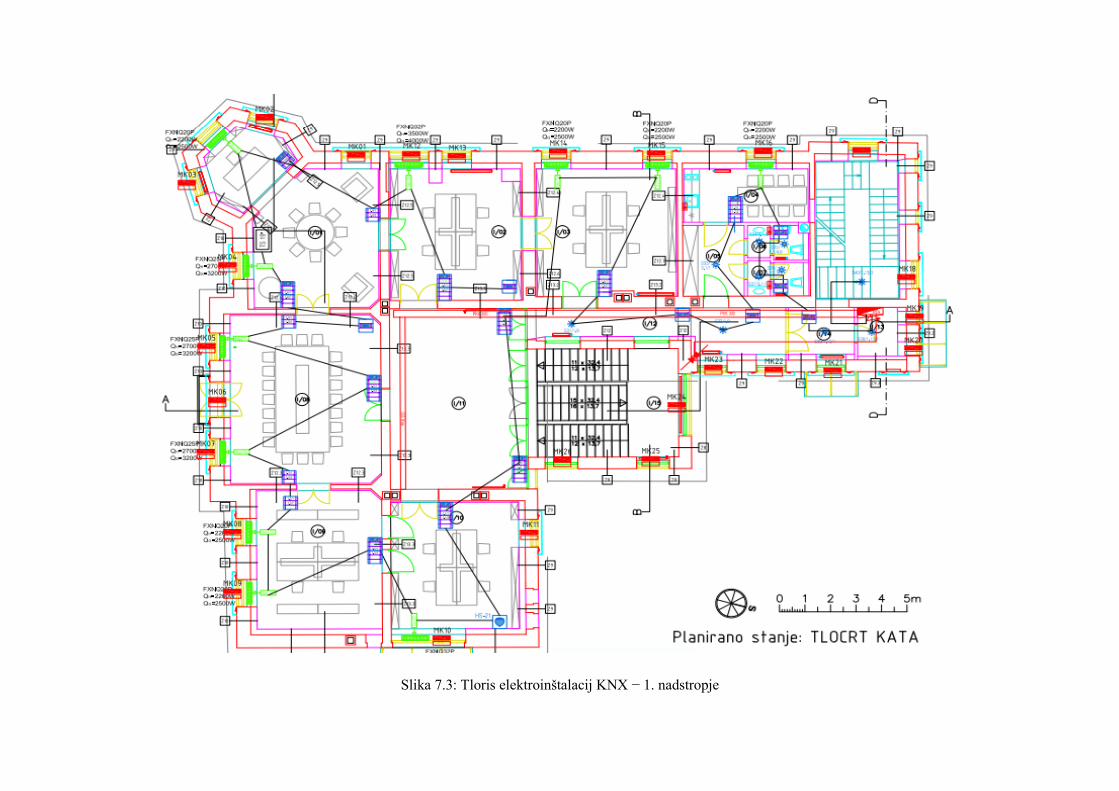
Slika 7.3: Tloris elektroinštalacij KNX − 1. nadstropje
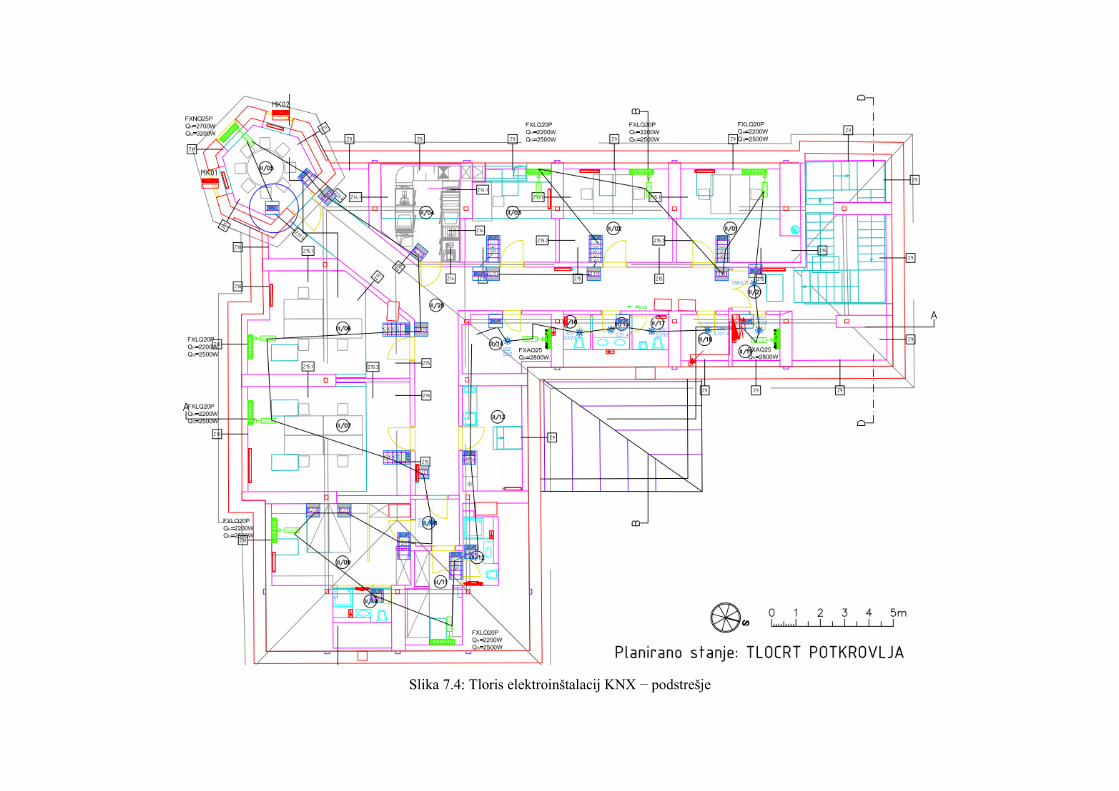
Slika 7.4: Tloris elektroinštalacij KNX − podstrešje
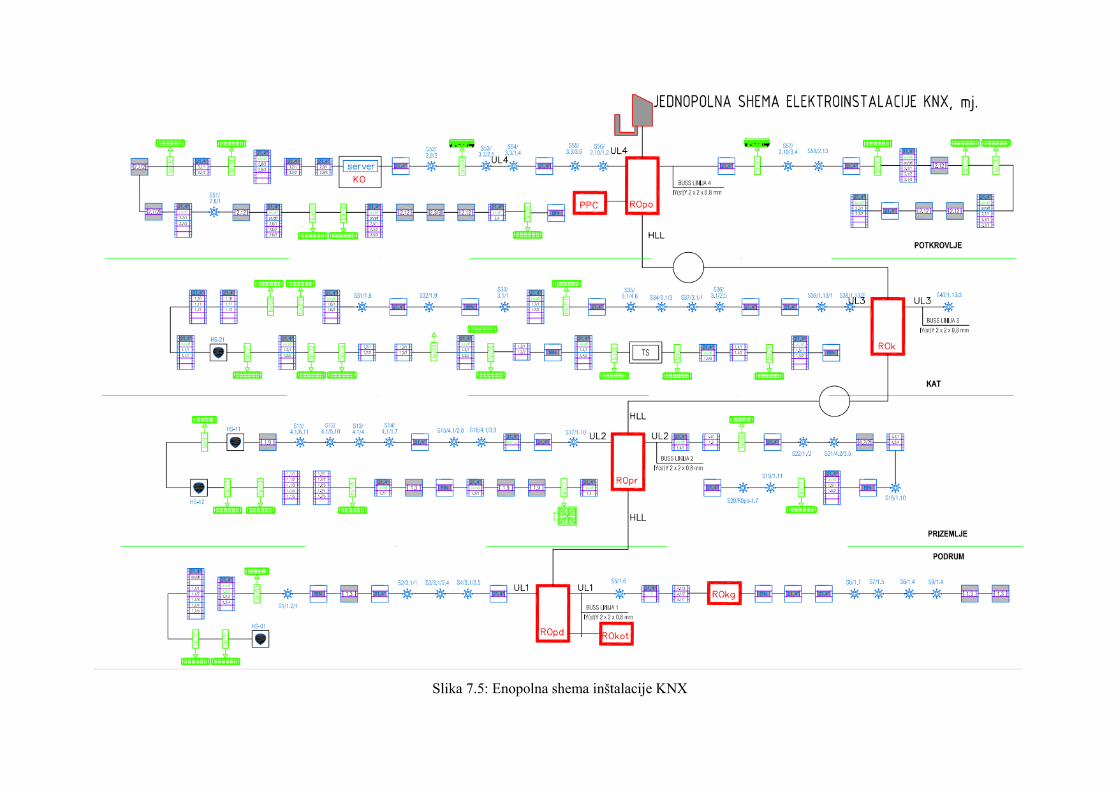
Slika 7.5: Enopolna shema inštalacije KNX

Priloga B: Shema za distribucijo električne energije v hiši in enopolna shema ene od stikalnih omaric
Slika 7.6: Shema za distribucijo električne energije v hiši
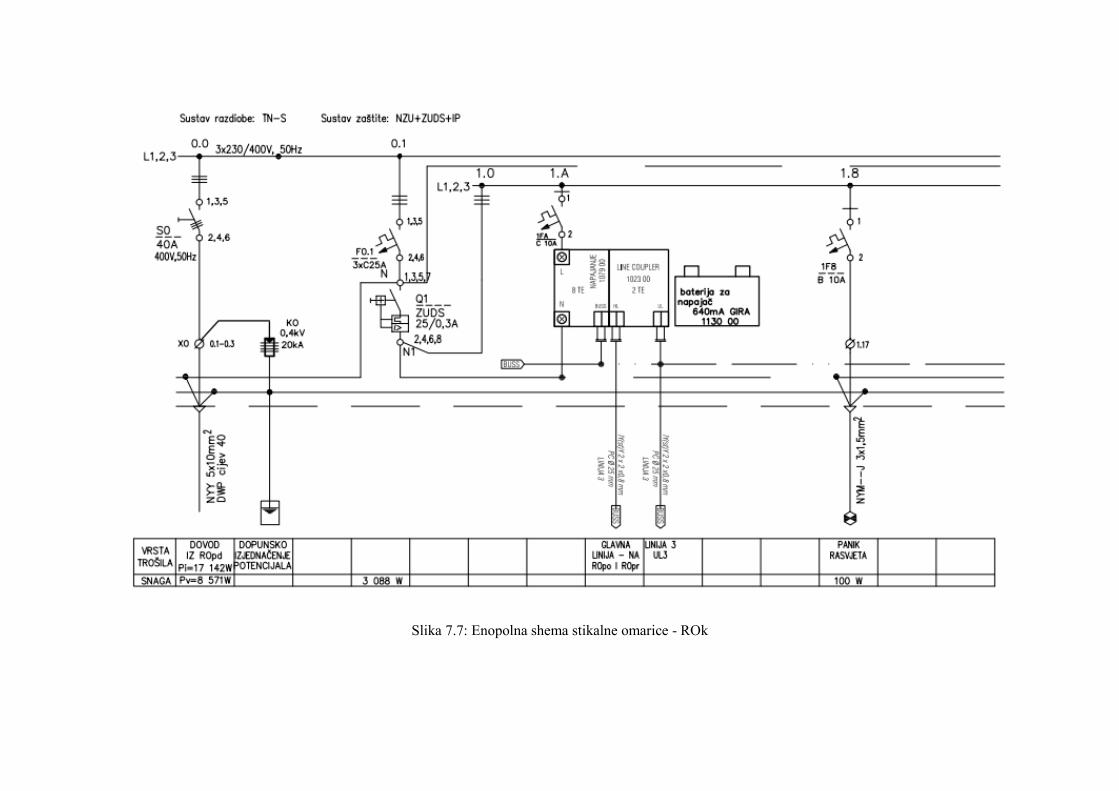
Slika 7.7: Enopolna shema stikalne omarice - ROk

Slika 7.8: Enopolna shema stikalne omarice - ROk
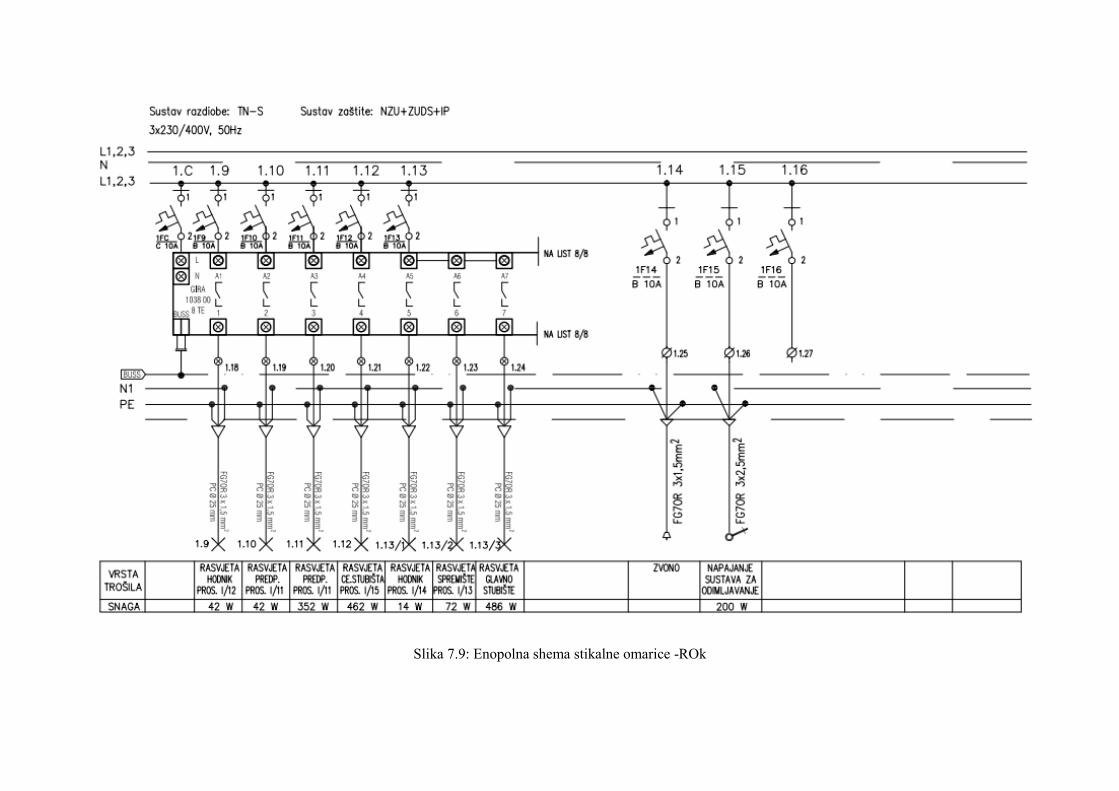
Slika 7.9: Enopolna shema stikalne omarice -ROk

Slika 7.10: Enopolna shema stikalne omarice -ROk

Slika 7.11: Enopolna shema stikalne omarice -ROk

Slika 7.12: Enopolna shema stikalne omarice -ROk
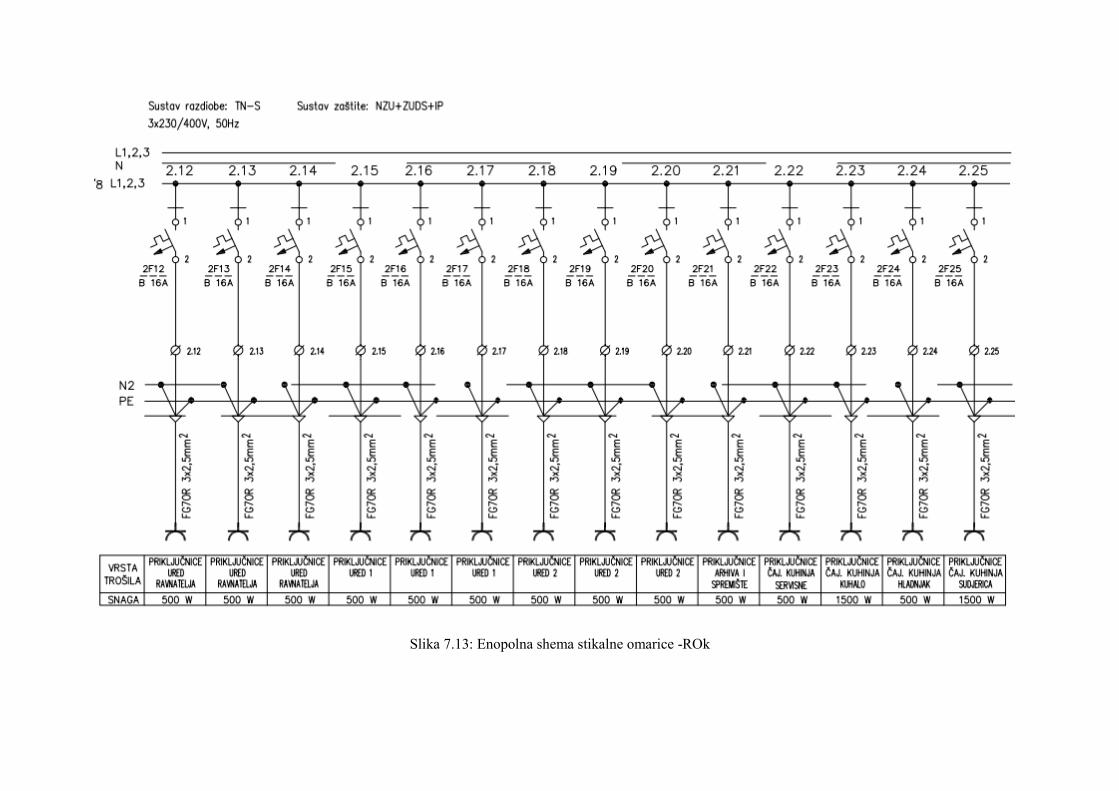
Slika 7.13: Enopolna shema stikalne omarice -ROk
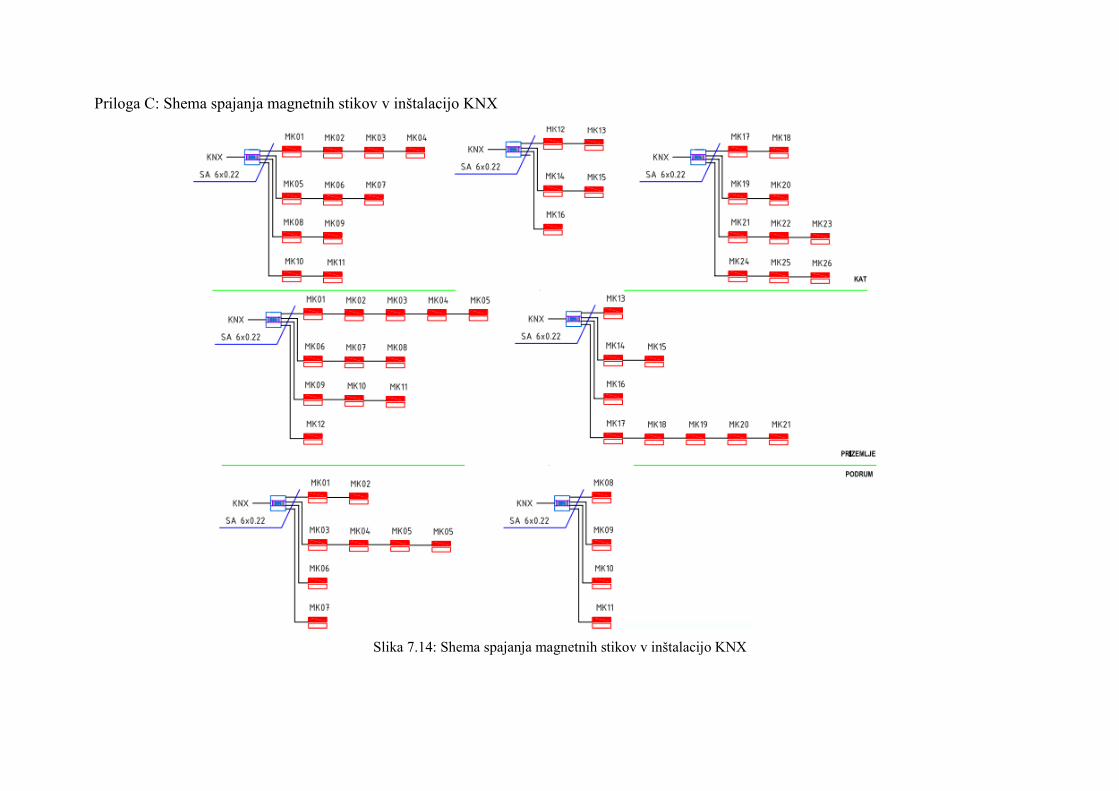
Priloga C: Shema spajanja magnetnih stikov v inštalacijo KNX
Slika 7.14: Shema spajanja magnetnih stikov v inštalacijo KNX