Embed Size (px)
Citation preview

ContenidoBuses de campo.Protocolo MODBUS y su aplicación.Protocolo MCP (Multidrop Communications Protocol) y su aplicación.Perspectivas del sistema.

Buses campoUn bus de campo es un sistema de transmisión de datos seriales que simplifica enormemente la instalación y operación de máquinas y equipamiento industrial.

MODBUSModbus es un protocolo de comunicaciones estándar basado en la arquitectura maestro/esclavo.Existen dos variantes, Modbus RTU que es una representación binaria compacta de los datos y Modbus ASCII que es una representación legible del protocolo pero menos eficiente.
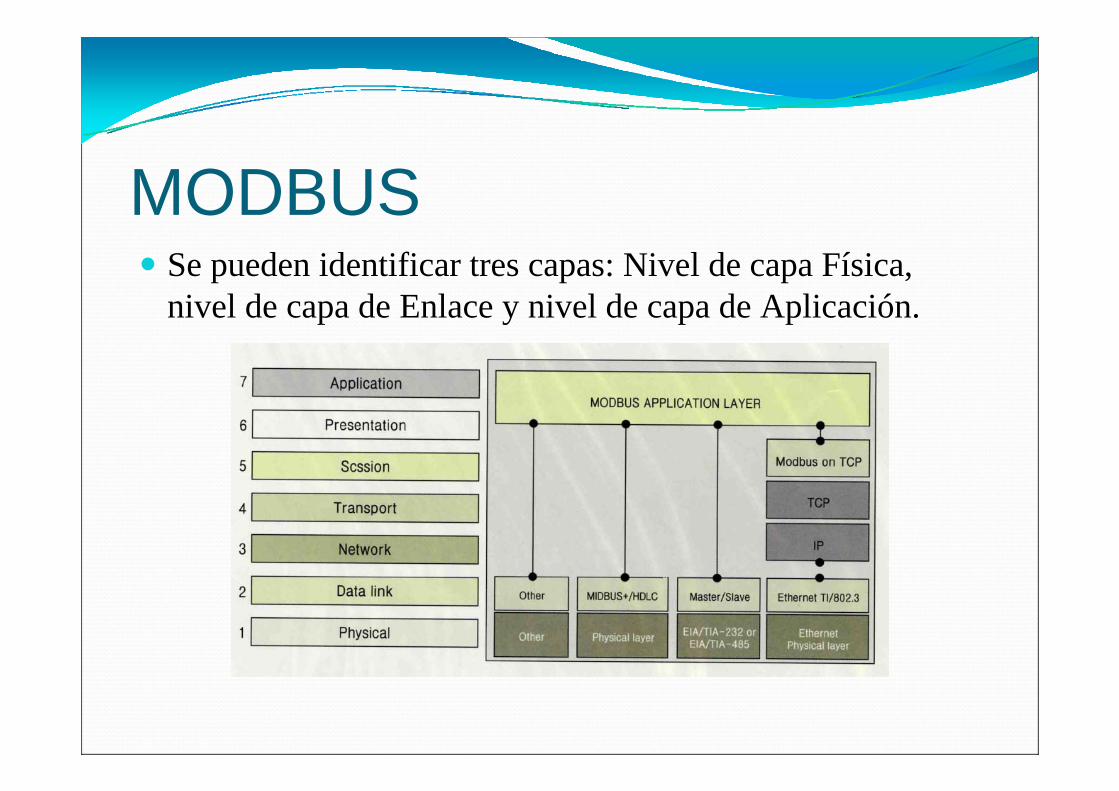
MODBUSSe pueden identificar tres capas: Nivel de capa Física, nivel de capa de Enlace y nivel de capa de Aplicación.

MODBUSFormato de trama modo RTU

MODBUSCampo código de Función (Function
code)

MODBUSFuncionamiento

MODBUSAplicación del protocolo en el ROJ.
Control de motores paso a paso para la tensión de pantalla de los tubos electrónicos correspondientes a los transmisores Driver y PA.Monitoreo de corrientes de los transmisores del ROJ.

Control de motores paso a paso y monitoreo de corrientes.Esquema de aplicación
DL305
DL350R E LA Y O U T P U T
D3-16TR110 V A C I N P U T
D3-16NA
0 4 0 41 5 1 52 6 2 63 7 3 7
I I I 0 4 0 41 5 1 52 6 2 63 7 3 7
I I I
0
2
4
6
C
1
3
5
7
C
1
3
5
7
0
2
4
6
I
I I
0
2
4
6
C
1
3
5
7
C
1
3
5
7
0
2
4
6
I
I I
ESTACION REMOTA
TX1
ESTACION REMOTA
TX4
BUS DE COMUNICACIONES RS485
PLC(Maestro)
MODULOACROMAG
Nº 1
MODULOACROMAG
Nº 8
Esclavos

Control de motores paso a paso y monitoreo de corrientes.Unidad central PLC.
Sistema conformado por controlador lógico programable (PLC) Direct 305 con soporte para MODBUS RTU con las siguientes funciones implementadas:

Ejemplo: Escritura de un solo registro (Function code 0x06)
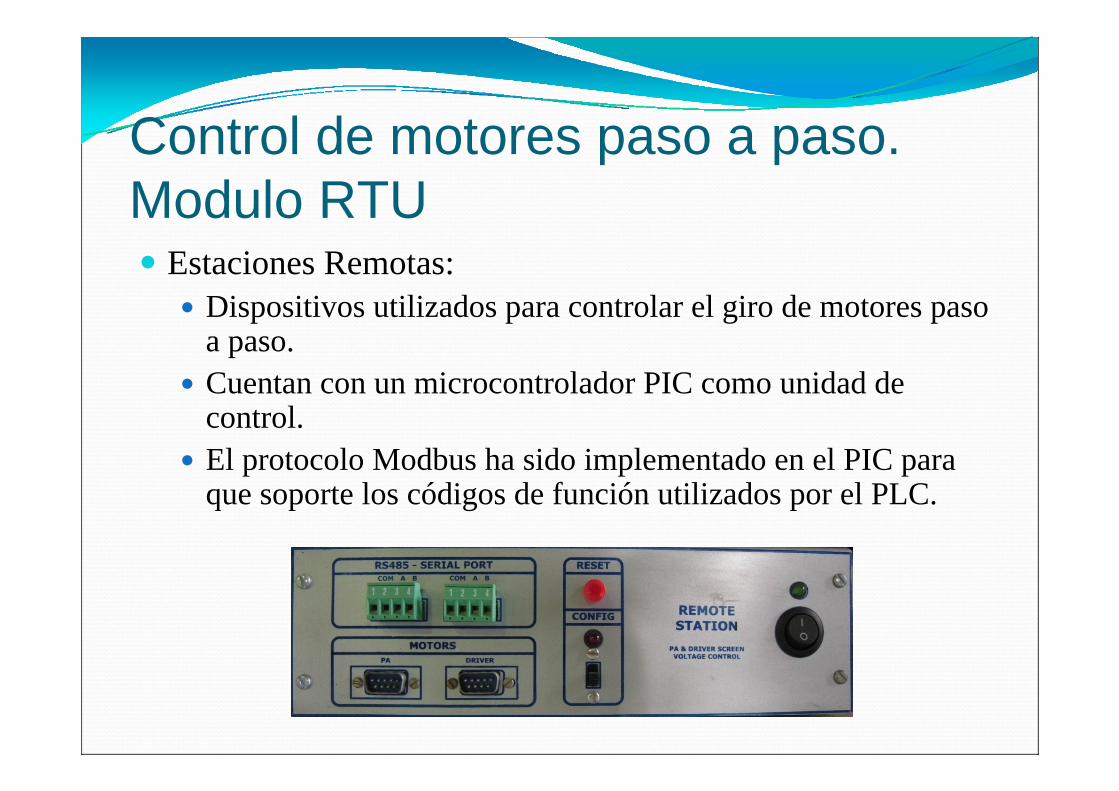
Control de motores paso a paso.Modulo RTU
Estaciones Remotas:Dispositivos utilizados para controlar el giro de motores paso a paso.Cuentan con un microcontrolador PIC como unidad de control.El protocolo Modbus ha sido implementado en el PIC para que soporte los códigos de función utilizados por el PLC.
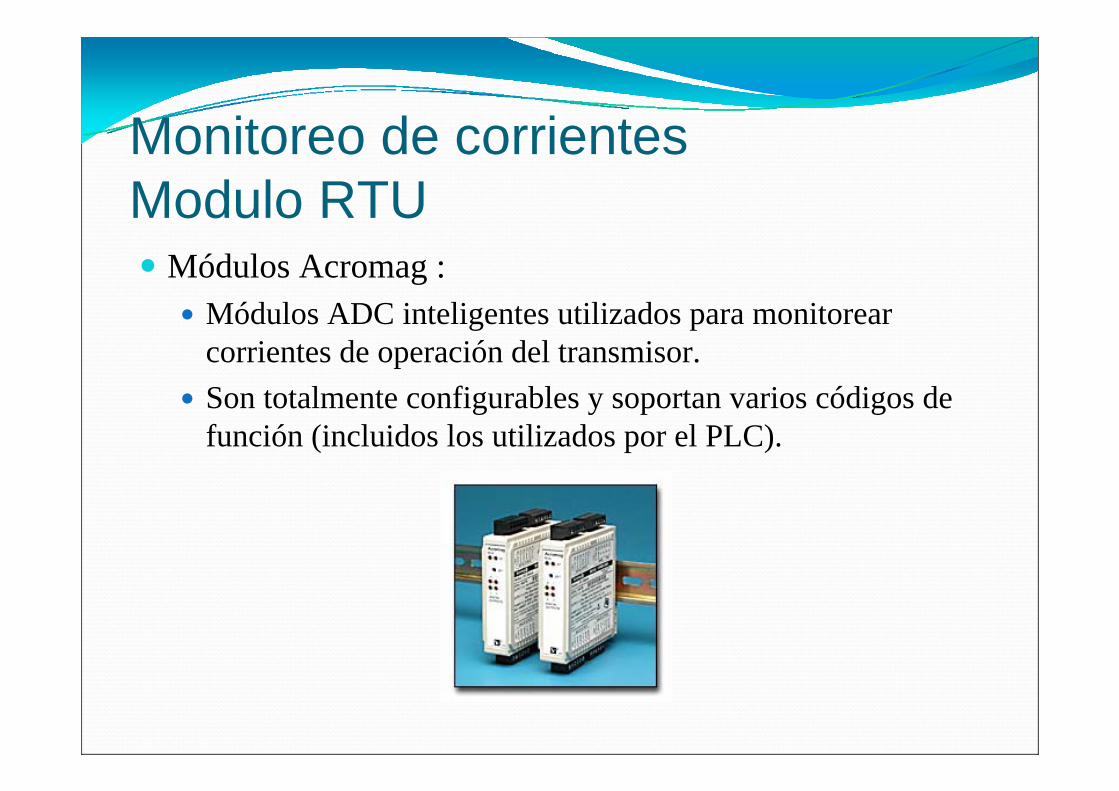
Monitoreo de corrientesModulo RTU
Módulos Acromag :Módulos ADC inteligentes utilizados para monitorear corrientes de operación del transmisor.Son totalmente configurables y soportan varios códigos de función (incluidos los utilizados por el PLC).
Multidrop Communications Protocol MCP.
MCP es un protocolo de comunicaciones propietario basado en la arquitectura maestro/esclavo o cliente/servidor. Su arquitectura es análoga a la capa “information protocol” del protocolo TCP/IP.
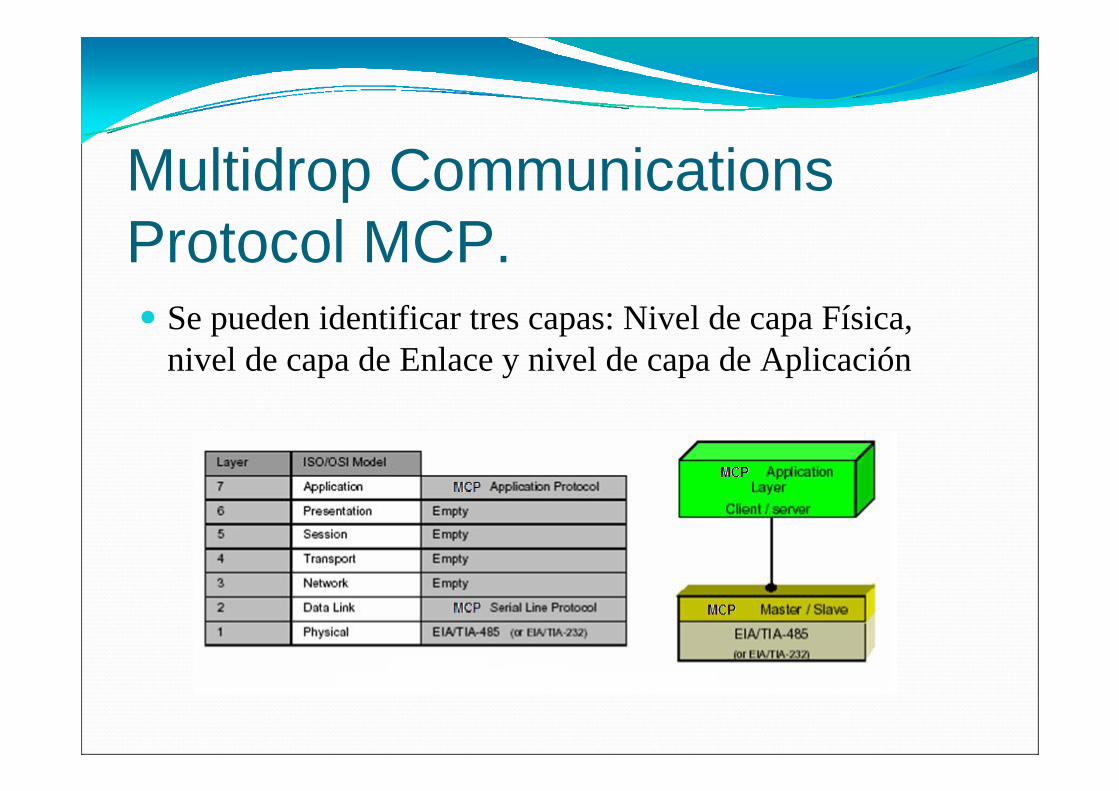
Multidrop Communications Protocol MCP.
Se pueden identificar tres capas: Nivel de capa Física, nivel de capa de Enlace y nivel de capa de Aplicación

MCPFormato de trama

MCPDescripción de campos de la trama
Destination address: Dirección de los módulos de la red, va desde la dirección 64 (0x40) a la dirección 95 (0x5f).Packet length: Cantidad de bytes contenidos en la trama sin considerar los campos “destination address” y el campo “packet length”.Packet sequence: Contador de los comandos enviados a los dispositivos de la red, este campo se utiliza para verificar la respuesta frente a un comando.Command class: Campo que define que tipo de comando será enviado, de uso general o de uso especifico.Command member: Campo que define la operación a realizarse. Dependiendo los dispositivos conectados a la red existen distintos tipos de funciones.Variant data: Campo utilizado para aquellos comandos o respuestas que requieren enviar datos en su trama.Checksum: Es la suma de todos los bytes en la trama sin incluir “destination address” y el propio campo checksum.

MCP Lista de comandos

MCP Aplicación del protocolo en el ROJ
Configuración de pulsos de transmisión según descripción de un archivo .TXCMonitoreo del estado del transmisor mediante el uso del programa MCP.exe

Transmisores de estado solido TOMCO de 20 KW.
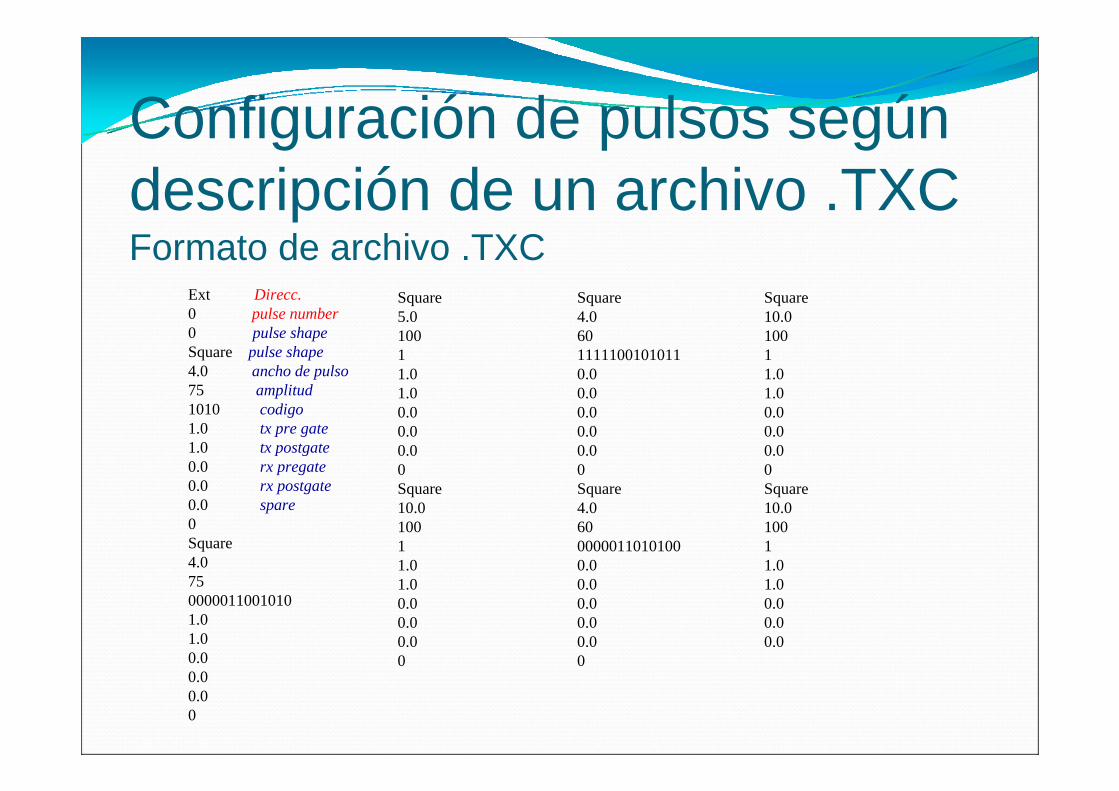
Configuración de pulsos según descripción de un archivo .TXCFormato de archivo .TXC
Ext Direcc.0 pulse number0 pulse shapeSquare pulse shape4.0 ancho de pulso75 amplitud1010 codigo1.0 tx pre gate1.0 tx postgate0.0 rx pregate0.0 rx postgate0.0 spare0Square4.07500000110010101.01.00.00.00.00
Square4.06011111001010110.00.00.00.00.00Square4.06000000110101000.00.00.00.00.00
Square5.010011.01.00.00.00.00Square10.010011.01.00.00.00.00
Square10.010011.01.00.00.00.00Square10.010011.01.00.00.00.0

Configuración de pulsos según descripción de un archivo .TXC
Se crea programa con soporte para la configuración de pulsos de transmisión basados en la descripción del protocolo MCP.El programa posee tres funciones que realizan tal tarea:
Process file: Encargado de procesar un archivo TXC.Setup serial Port: Encargado de configurar el puerto de comunicaciones.Send multidrop packet: Encargado de enviar los datos con tramas en formato MCP.


Monitoreo del estado del transmisor mediante el uso del programa MCP.exe
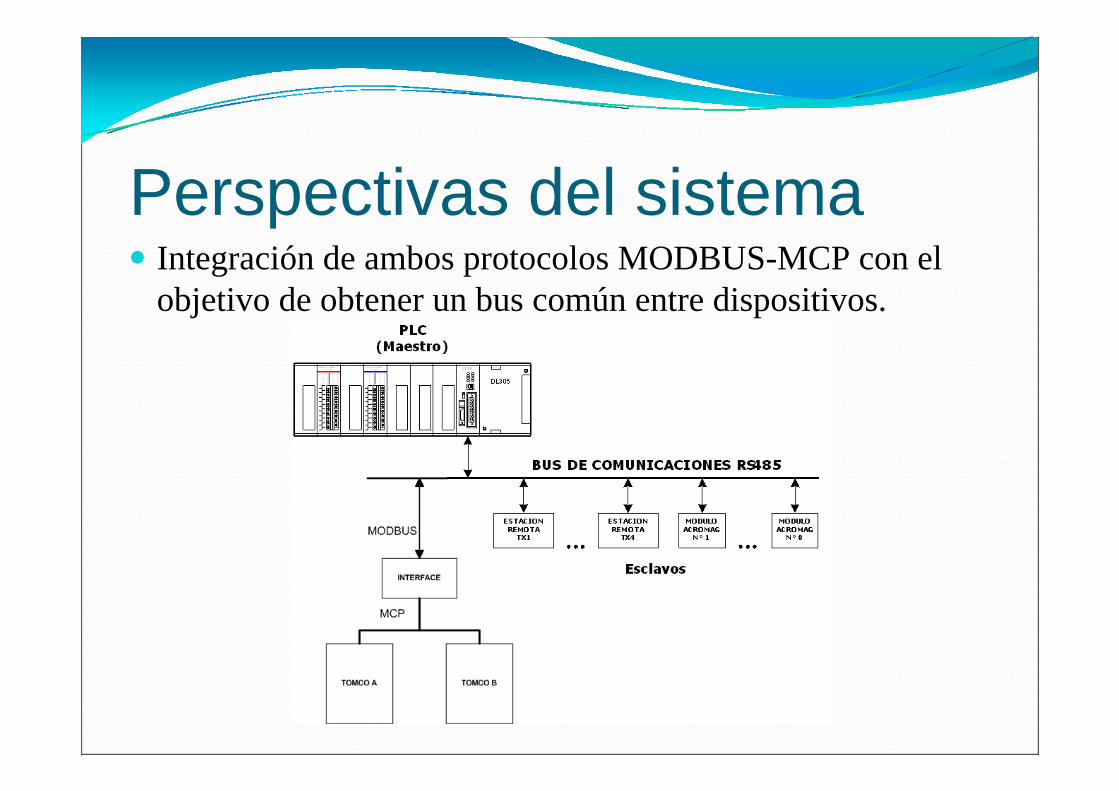
Perspectivas del sistemaIntegración de ambos protocolos MODBUS-MCP con el objetivo de obtener un bus común entre dispositivos.

GRACIAS





























