Embed Size (px)
DESCRIPTION
QBMATH
Citation preview
12MA251
QUESTION BANK
UNIT- 1 : MATRICES AND GAUSSIAN ELIMINATION
1 For the equations x + y = 4 , 2x – 2y = 4 draw the row picture and column picture2 Do the three planes x + 2y + z = 4 , y – z = 1 and x + 3y = 0 have at least one common
point of intersection ? Explain. Is the system consistent if the last equation is changed to x + 3y = 5 ? If so, solve the system completely.
3 Find an LU factorization of A =
. What is the
rank of A ?4 Solve for the columns of A-1 = given the systems of equations
and . Also find the matrix B such that A-1 B = I .
5 Find the factors L and U for the matrix A = . Write down
the permutation matrices, if any, that need to be used in the process of elimination.6 If the inverse of A = is known to be
, use Gauss – Jordan elimination on [ A I ] to find
the values of a and b.7 When is a system of equations called singular? Explain the different types of singular
systems of two equations in two unknowns with a suitable example for each case. Also provide a neat sketch of the row picture of these cases.
8 Apply elimination & back substitution to solve the equations 2x + 3y + z = 8,4x + 7y + 5z = 20, -2y + 2z = 0.
9 Apply elimination & back substitution to solve the system : 2x – 3y = 3,4x – 5y + z = 7, 2x – y – 3z = 5.
10 Which number q makes this system singular and which right-hand side t gives it infinitely many solutions? Find the solution that has z = 1x + 4y – 2z = 1, x + 7y-6z = 6, 3y + qz = t.
11 Find the pivots and the solution for these 4 equations2x + y = 0, x +2y + z = 0, y +2z + t = 0, z + 2t = 5.
12 Under what conditions on their entries are A and B invertible?
A= B =
13 Use Gauss –Jordan method to invert
A1 = A2 = A3 =
14 Find the pivots and the solution for the equations x + 4y -2z + 8t = 12, y -7z + 2t = -4, 5z - t = 7 and z + 3t = -5.
15 Given a system of three equations in three unknowns, mention any five singular cases of the row picture of the system. Also write down the number of solutions in each case.
16 Given A = , what conditions apply on the entries of
A to get a full set of pivots? Write down the permutation matrices that need to be used to reduce A to an upper triangular form.
17 Sketch these three lines and decide if the equations are solvable : x + 2y = 2, x – y = 2 and y = 1 . What happens if all right hand sides are zeros? Is there any nonzero choice of right hand sides that allows the three lines to intersect at the same point ? Also, draw the column picture for the first two equations.
18 If A = which three matrices put A
into triangular form U? Multiply these three matrices to get one matrix M that does the elimination M A = U.
19 Apply elimination to produce the factors L and U for A = .
Find also the LDU factorization and explain why A = LU is not possible.20 Describe the intersection of the three planes x + y + z + t = 6, x + z + t = 4 and x + z = 2 in
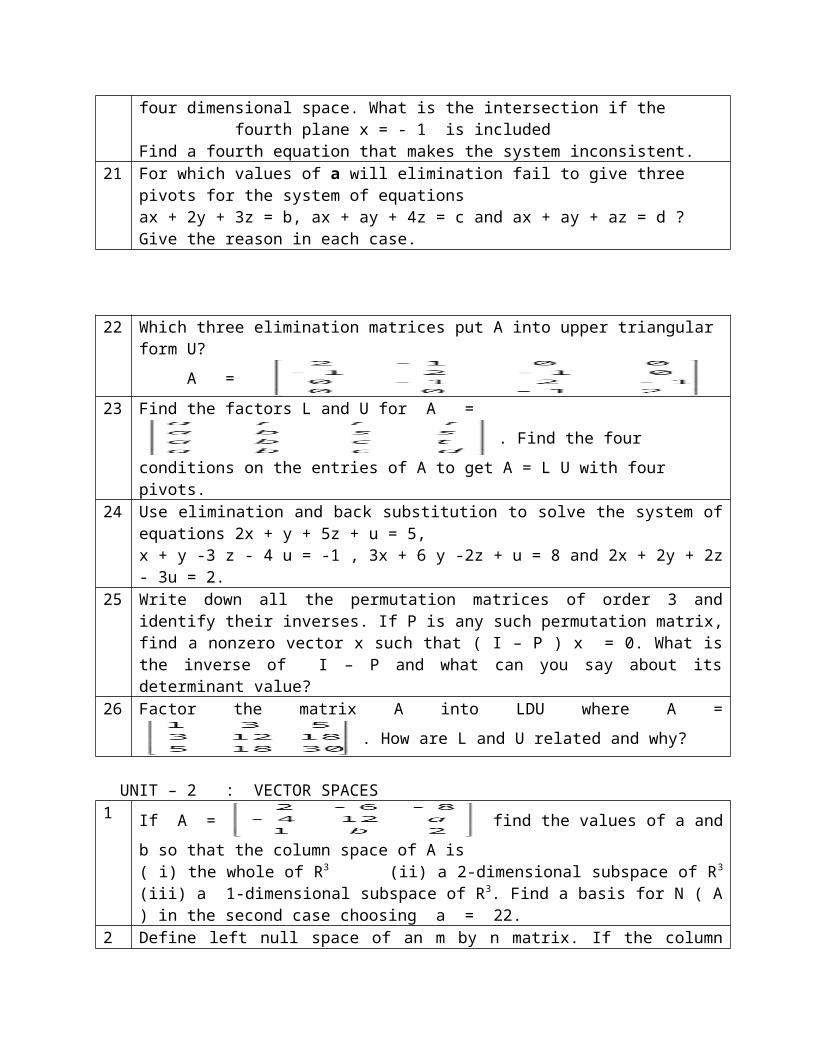
four dimensional space. What is the intersection if the fourth plane x = - 1 is includedFind a fourth equation that makes the system inconsistent.
21 For which values of a will elimination fail to give three pivots for the system of equationsax + 2y + 3z = b, ax + ay + 4z = c and ax + ay + az = d ? Give the reason in each case.
22 Which three elimination matrices put A into upper triangular form U?
A =
23 Find the factors L and U for A = .
Find the four conditions on the entries of A to get A = L U with four pivots.24 Use elimination and back substitution to solve the system of equations 2x + y + 5z + u = 5,
x + y -3 z - 4 u = -1 , 3x + 6 y -2z + u = 8 and 2x + 2y + 2z - 3u = 2. 25 Write down all the permutation matrices of order 3 and identify their inverses. If P is any

such permutation matrix, find a nonzero vector x such that ( I – P ) x = 0. What is the inverse of I – P and what can you say about its determinant value?
26 Factor the matrix A into LDU where A = . How are L and
U related and why?
UNIT – 2 : VECTOR SPACES1 If A = find the values of a and b so that the column
space of A is( i) the whole of R3 (ii) a 2-dimensional subspace of R3 (iii) a 1-dimensional subspace of R3. Find a basis for N ( A ) in the second case choosing a = 22.
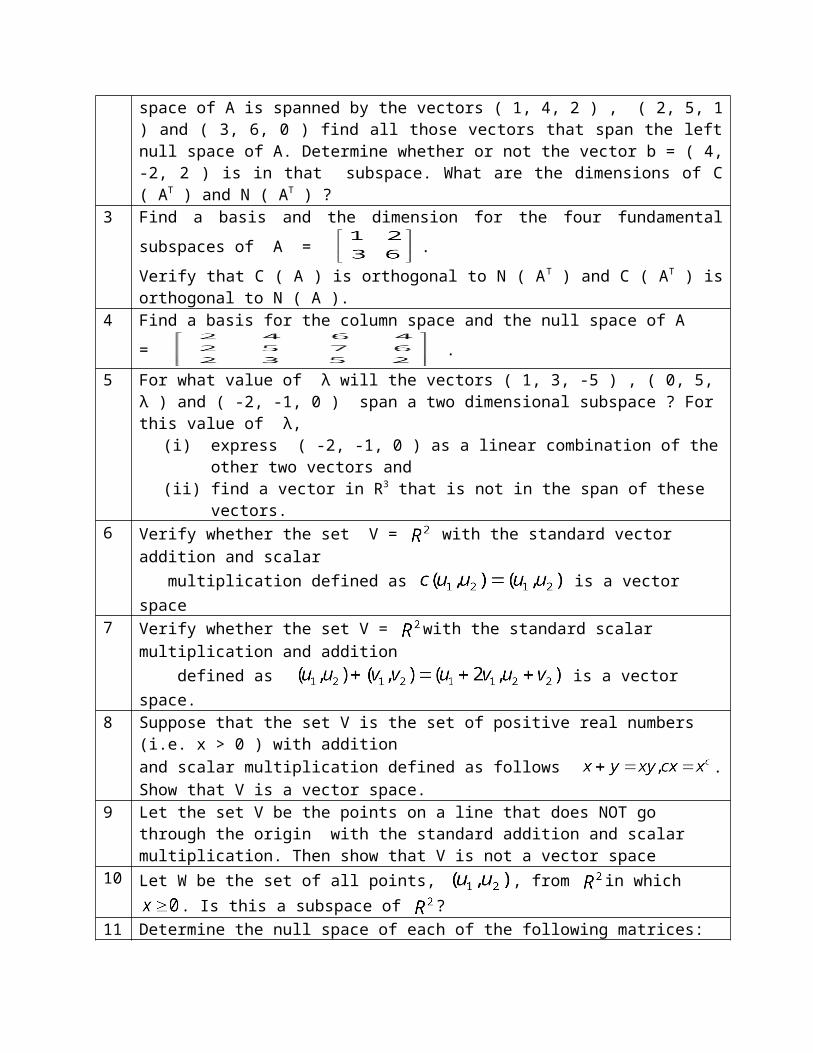
2 Define left null space of an m by n matrix. If the column space of A is spanned by the vectors ( 1, 4, 2 ) , ( 2, 5, 1 ) and ( 3, 6, 0 ) find all those vectors that span the left null space of A. Determine whether or not the vector b = ( 4, -2, 2 ) is in that subspace. What are the dimensions of C ( AT ) and N ( AT ) ?
3 Find a basis and the dimension for the four fundamental subspaces of A = .
Verify that C ( A ) is orthogonal to N ( AT ) and C ( AT ) is orthogonal to N ( A ).4 Find a basis for the column space and the null space of A =
.
5 For what value of λ will the vectors ( 1, 3, -5 ) , ( 0, 5, λ ) and ( -2, -1, 0 ) span a two dimensional subspace ? For this value of λ,
(i) express ( -2, -1, 0 ) as a linear combination of the other two vectors and(ii) find a vector in R3 that is not in the span of these vectors.
6 Verify whether the set V = with the standard vector addition and scalar multiplication defined as is a vector space
7 Verify whether the set V = with the standard scalar multiplication and addition defined as is a vector space.
8 Suppose that the set V is the set of positive real numbers (i.e. x > 0 ) with additionand scalar multiplication defined as follows . Show that V is a vector space.
9 Let the set V be the points on a line that does NOT go through the origin with the standard addition and scalar multiplication. Then show that V is not a vector space
10 Let W be the set of all points, , from in which . Is this a subspace of ?11 Determine the null space of each of the following matrices:
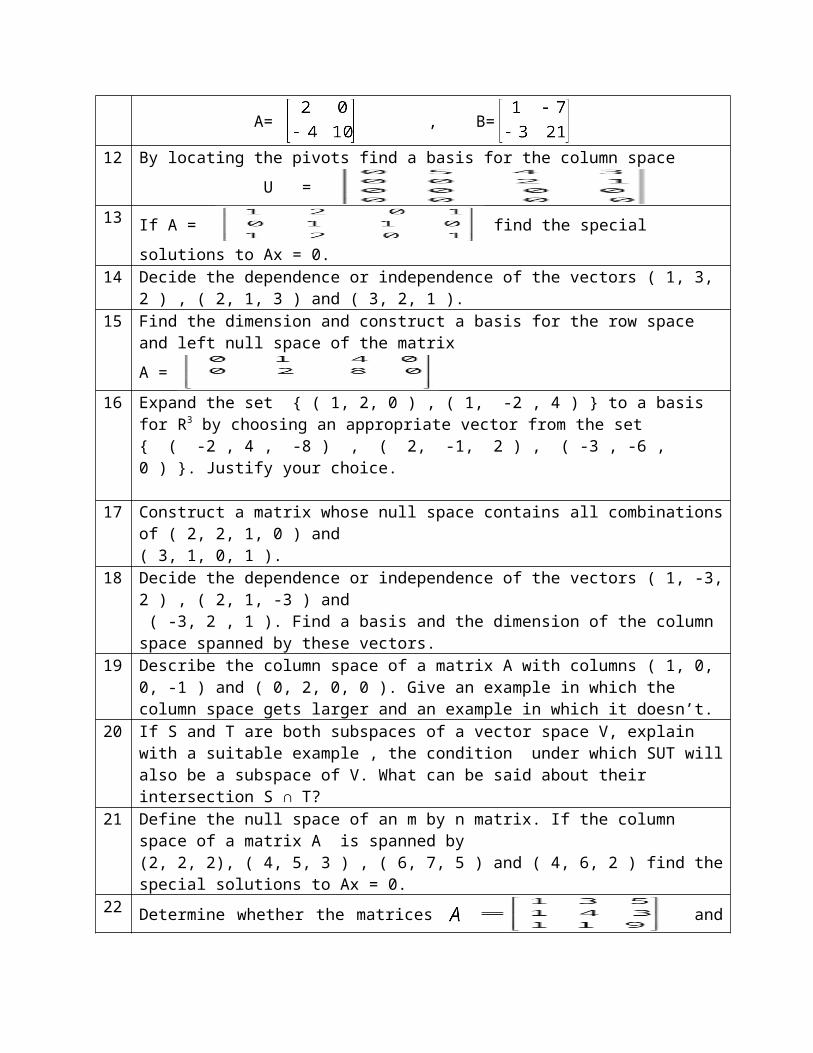
A= , B=
12 By locating the pivots find a basis for the column space U =
13 If A = find the special solutions to Ax = 0.
14 Decide the dependence or independence of the vectors ( 1, 3, 2 ) , ( 2, 1, 3 ) and ( 3, 2, 1 ).15 Find the dimension and construct a basis for the row space and left null space of the matrix
A =
16 Expand the set { ( 1, 2, 0 ) , ( 1, -2 , 4 ) } to a basis for R3 by choosing an appropriate vector from the set { ( -2 , 4 , -8 ) , ( 2, -1, 2 ) , ( -3 , -6 , 0 ) }. Justify your choice.
17 Construct a matrix whose null space contains all combinations of ( 2, 2, 1, 0 ) and( 3, 1, 0, 1 ).
18 Decide the dependence or independence of the vectors ( 1, -3, 2 ) , ( 2, 1, -3 ) and ( -3, 2 , 1 ). Find a basis and the dimension of the column space spanned by these vectors.
19 Describe the column space of a matrix A with columns ( 1, 0, 0, -1 ) and ( 0, 2, 0, 0 ). Give an example in which the column space gets larger and an example in which it doesn’t.
20 If S and T are both subspaces of a vector space V, explain with a suitable example , the condition under which SUT will also be a subspace of V. What can be said about their intersection S ∩ T?
21 Define the null space of an m by n matrix. If the column space of a matrix A is spanned by(2, 2, 2), ( 4, 5, 3 ) , ( 6, 7, 5 ) and ( 4, 6, 2 ) find the special solutions to Ax = 0.
22 Determine whether the matrices and B =
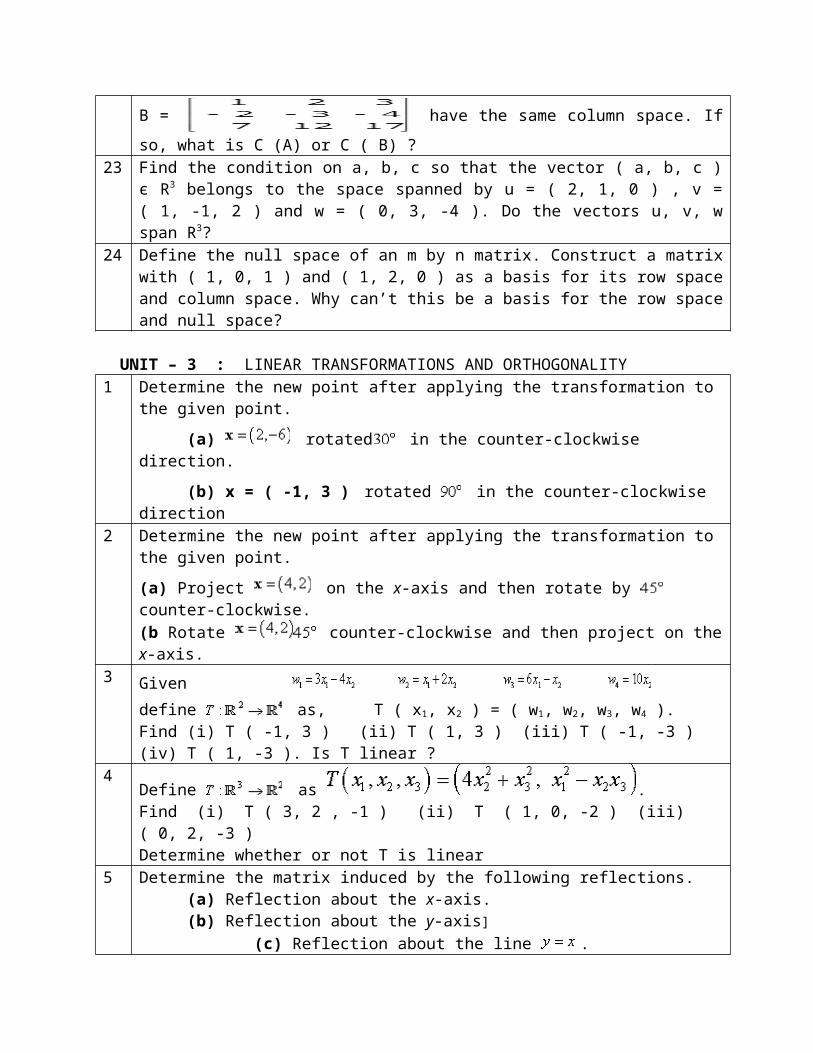
have the same column space. If so, what is C (A) or C (
B) ?23 Find the condition on a, b, c so that the vector ( a, b, c ) є R 3 belongs to the space spanned
by u = ( 2, 1, 0 ) , v = ( 1, -1, 2 ) and w = ( 0, 3, -4 ). Do the vectors u, v, w span R3?24 Define the null space of an m by n matrix. Construct a matrix with ( 1, 0, 1 ) and ( 1, 2, 0 )
as a basis for its row space and column space. Why can’t this be a basis for the row space and null space?
UNIT – 3 : LINEAR TRANSFORMATIONS AND ORTHOGONALITY1 Determine the new point after applying the transformation to the given point.
(a) rotated in the counter-clockwise direction.
(b) x = ( -1, 3 ) rotated in the counter-clockwise direction 2 Determine the new point after applying the transformation to the given point.
(a) Project on the x-axis and then rotate by counter-clockwise.(b Rotate counter-clockwise and then project on the x-axis.
3 Given define as, T ( x1, x2 ) = ( w1, w2, w3, w4 ).Find (i) T ( -1, 3 ) (ii) T ( 1, 3 ) (iii) T ( -1, -3 ) (iv) T ( 1, -3 ). Is T linear ?
4Define as .Find (i) T ( 3, 2 , -1 ) (ii) T ( 1, 0, -2 ) (iii) ( 0, 2, -3 )Determine whether or not T is linear
5 Determine the matrix induced by the following reflections.(a) Reflection about the x-axis. (b) Reflection about the y-axis]
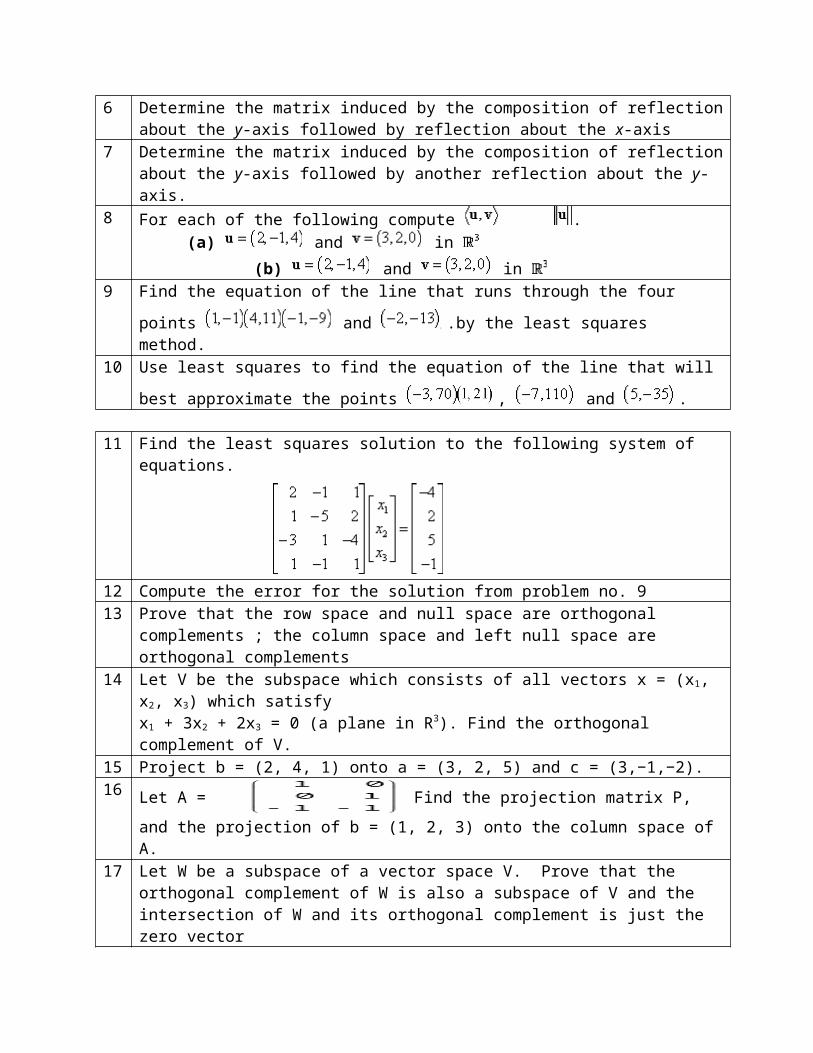
(c) Reflection about the line . 6 Determine the matrix induced by the composition of reflection about the y-axis followed
by reflection about the x-axis7 Determine the matrix induced by the composition of reflection about the y-axis followed
by another reflection about the y-axis.8 For each of the following compute .
(a) and in (b) and in
9 Find the equation of the line that runs through the four points and
by .by the least squares method.10 Use least squares to find the equation of the line that will best approximate the points
, and .
11 Find the least squares solution to the following system of equations.
12 Compute the error for the solution from problem no. 913 Prove that the row space and null space are orthogonal complements ; the column space
and left null space are orthogonal complements14 Let V be the subspace which consists of all vectors x = (x1, x2, x3) which satisfy
x1 + 3x2 + 2x3 = 0 (a plane in R3). Find the orthogonal complement of V.15 Project b = (2, 4, 1) onto a = (3, 2, 5) and c = (3,−1,−2).16 Let A = Find the projection matrix P, and the projection of b = (1,
2, 3) onto the column space of A.17 Let W be a subspace of a vector space V. Prove that the orthogonal complement of W is
also a subspace of V and the intersection of W and its orthogonal complement is just the zero vector
18 Find a basis for the orthogonal complement of the space spanned by (1,0,1,0,2), (0,1,1,1,0) and (1,1,1,1,1).
19 Let S be the 2-dimensional subspace of R3 spanned by the orthogonal vectors v1 = (1, 2, 1) and v2 = (1, −1, 1). Write the vector v = (−2, 2, 2) as the sum of a vector in S and a vector orthogonal to S.
20 Consider the subspace V of R3 span by (1,1,1) and (1,0,1). Find all the vectors orthogonal to V.
21 Find the projection of (1,2,3) onto the subspace of R3 spanned by (1,1,0) and (1,0,0).22 Find the orthogonal complement V where V is the subspace of R3 spanned by
(1,1,0) and (1,0,0).23 Let V = R4, W = Span { u = [1 1 0 2]; v = [2 0 1 1];w = [1 ¡1 1 ¡1] } . Find a basis of .24 In , find the orthogonal complement of the plane
25 Find the orthogonal projection of the vector v onto this subspace P given
26Show that the three vectors v1 = (1, 2, 1) ; v2 = ( 2, 1, -4 ) ; v3 = (3, -2, 1) are mutually orthogonal. Express the the vector v = (7, 1, 9) as a linear combination of v1; v2; v3.
27Project the vector b = (1, 2, 1) onto the line through a = (2, -3, 1). Also check that the vector e = b – p is orthogonal to a.
28
Solve Ax = b by least squares, and find p = A if A = , b =
. Verify that the error b-p is perpendicular to the column of A29
Find the best least squares solution to 3x = 10, 4x = 5. What error E2 is mininmised? Check the error vector (10 - 3 , 5-4 ) is perpendicular to the column (3,4).
30 Find the best straight line fit (least squares) to the measurements b = 4 at t = -2, b = 3 at
t = -1, b = 1 at t = 0, b = 0 at t = 2. Then find the projection of b = (4,3,1,0) onto the
column space of A =
UNIT – 4 : ORTHOGONALIZATION, EIGEN VALUES AND EIGEN VECTORS1 Let Q = and x = ( . Show that Q has
orthonormal columns and 2 Project b = ( 1, 2, 3 ) onto the lines through a1 = ( 0, 0, 1 ) , a2 = ( 0, 1, 1 ) and a3 = ( 1, 1, 1 ).
Apply the Gram- Schmidt process to a1, a2, a3 to produce an orthonormal set of vectors and write the result in the form A = QR.
3 Apply Gram – Schmidt process to a = (0, 0, 1), b = (0, 1, 1) and c = (1, 1, 1) and write the result in the form A=QR.
4 Find the eigen values and eigen vectors of A = . Check that the sum
of the eigen values equals the trace of A and their product equals the determinant of A. What
are the eigen values of A2 ?5 Find the matrix A whose eigen vales are 1 and 4 and whose eigen vectors are ( 3, 1 ) and
( 2, 1 ) respectively. What are the eigen values of A-1 ?6 Let λ be an eigen value of A with x as the corresponding eigen vector. Show that
(i) λ2 is an eigen value of A2 with the same eigen vector x.1 / λ is an eigen value of A-1 with the same eigen vector x provided A is nonsingular.
7 Find the eigen values and eigen vectors of A = .Check that
the sum of the eigen values equals the trace of the matrix A and their product equals the determinant of A. Is A diagonalizable ? If so, write down the matrix S that diagonalizes A .
8 Find the eigen values and the corresponding eigen vectors of A = .
9 Use the power method to compute the numerically largest eigen value of
A = starting with an initial approximation of ( 0 , 0 , 1 ).
( Correct to 3 decimal places ) .10 Diagonalize A = and find one of its square roots – a matrix R such that
R2 = A.11 Find all the eigen values of the operator defined by
121. Find eigenvalues and eigenvectors of and . Check that sum of
the eigenvalues equals to the trace and product of eigenvalues equals the determinant.
13 If x is a eigenvector corresponding to the eigenvalue ( ), show that x is also the eigenvector of A –1
14Find eigenvalues and eigenvectors of and .
15Diagonalize the matrix and find one of its square roots. (Square root of A is a
matrix R such that R2 = A). How many square roots will there be?16
Factor these two matrices into A = for and .
17Diagonalize and hence prove that .
18 Using the power method determine the largest Eigen value and the corresponding Eigen
vector of the matrix: by considering the initial approximation as (1, 0).
192. Using power method, find the largest Eigen value & the corresponding Eigen vector of the
matrix
by choosing (1, 0, 0) as initial approximation
UNIT – 5 : NUMERICAL SOLUTION OF LINEAR SYSTEM OF EQUATIONS AND LPP
1 Solve the following equations by gauss - Seidel method:
1. 2. 3.
4. 5. 6.
2 Solve the following equations by Jacobi’s iteration method.
1. 5x+2y+z = 12 2. 3x+9y-2z = 11 3. 2x+y+6z = 9
X+4y+2z = 15 4x+2y13z = 24 8x+3y+2z = 13
X+2y+5z = 20 4x-4y+3z = -8 x+5y+z = 7.
4. 5x-y+z = 11
x+y+z = 12
2x+2y+z =-2. 3 An aeroplane can carry a maximum of 200 passengers. A profit of Rs. 400 is made on
each first class ticket and a profit of Rs. 300 is made on each economy class ticket . The airline reserves at least 20 seats for first class. How many tickets of each class must be sold in order to maximize profit for the airline? Formulate the problem
4 Maximize Z = subject to using Graphical method.
5 Using graphical method solve the following LPP, Minimize Z = .
6 Convert the following LPP to standard form; Maximize

7 Using simplex method solve, Maximize: subject to
.8 Minimize: subject to
.
Use simplex method