Embed Size (px)
Citation preview

Réduction de modèle par POD ENIM 2007
Page 1 sur 55
SOMMAIRE
A - INTRODUCTION GENERALE ..................................................................................................................................2
CHAPITRE I - DECOMPOSITION ORTHOGONALE AUX VALEURS PROPRES (POD).................................4
A - PRESENTATION DE LA POD..................................................................................................................................5 1 - L’équation de Fredholm..................................................................................................................................6 2 - Propriétés des fonctions de bases POD.............................................................................................8 3 - Optimalité de la base POD...........................................................................................................................11
B - LES DIFFERENTES APPROCHES DE LA TECHNIQUE POD................................................................................11 1 - Méthode classique..........................................................................................................................................11
a - Discussion sur la taille du problème aux valeurs propres.......................................................................................12 2 - Méthode snapshots.........................................................................................................................................13 3 - Critère de choix de méthode des snapshots ou POD classique?............................................................14 4 - Troncature de la base POD..........................................................................................................................15
C - CONCLUSION........................................................................................................................................................16
CHAPITRE II - : POD- ROM METHODOLOGIE .............. ......................................................................................17
A - MODELE D’ORDRE REDUIT BASE SUR LA POD : POD ROM....................................................................................18 1 - Projection de Galerkin .......................................................................................................................................18
a - Généralités........................................................................................................................................................................18 b - Modèles d’ordre faibles basés sur la POD........................................................................................................................19 c - Conditions aux limites......................................................................................................................................................21
2 - Détermination des fonctions de base POD ........................................................................................................23 3 - Détermination des coefficients de projection temporels ....................................................................................24 4 - Détermination des coefficients de prédiction temporels ....................................................................................24
B - APPLICATION AU CONTROLE ACTIF DES ECOULEMENTS.................................................................................26 1 - Système d’équation sans contrôle ......................................................................................................................27 2 - Système d’équation avec contrôle ......................................................................................................................27 3 - Technique de calibration du système POD ROM...............................................................................................28
C - IMPLEMENTATION SUR L’ENVIRONNEMENT MATLAB ..............................................................................................30 D - CONCLUSION...........................................................................................................................................................32
CHAPITRE III - : RESULTATS ET DISCUSSIONS.................................................................................................33
A - VALIDATION PAR UN CHAMP NUMERIQUE...............................................................................................................34 1 - Analyse POD......................................................................................................................................................35 2 - Valeurs propres..................................................................................................................................................35 3 - Modes propres....................................................................................................................................................35 4 - Coefficients.........................................................................................................................................................41
B - APPLICATION SUR DES MESURES PIV ......................................................................................................................43 1 - Analyse POD......................................................................................................................................................44 2 - Valeurs propres..................................................................................................................................................44 3 - Modes propres....................................................................................................................................................45 4 - Coefficients.........................................................................................................................................................50
CHAPITRE IV - : CONCLUSION ET PERSPECTIVES ......... .................................................................................52
BIBLIOGRAPHIES........................................................................................................................................................54

Réduction de modèle par POD ENIM 2007
Page 2 sur 55
A - Introduction Générale
Au cours de ces dernières décennies et malgré le développement important des outils
d’analyse des systèmes dynamiques, que ce soit sur le plan numérique, analytique ou même
expérimental plusieurs systèmes dynamiques à intérêts importants restent inaccessibles ou le cas
échéant partiellement inaccessibles tel que les mécanismes de transition d’un écoulement de fluide
du régime laminaire au régime turbulent qui ne sont pas complètement élucidés. Etant donné la
difficulté qu’apporte l’analyse directe des équations différentielles régissant cet écoulement. Pour
cela, des modèles à faibles dimensions pouvant approcher ces équations sont recherchés.
L’opération qui consiste à obtenir un modèle de faibles dimensions à partir d’un modèle complexe
s’appelle une « réduction de modèle ». La POD « Proper Orthogonal Decomposition », s’inscrit
dans ce cadre et permet d’obtenir une approximation de faibles dimensions par projection du
système d’équations non linéaires de Navier Stokes et de l’énergie sur une base de fonctions
déterminée à partir de données empiriques. Parmi les propriétés intéressantes de la POD figure
l’optimalité. En effet, elle permet de capturer les composantes dominantes d’un processus infini
avec seulement quelques « modes ». La POD a été introduite dans le contexte de la turbulence par
Lumley (1967). Dans d’autres domaines, cette procédure prend le nom de la décomposition de
Karhunen-Loève, outil principal d’analyse singulière des systèmes. Cette décomposition POD a
été utilisée dans différentes disciplines allant depuis les variables aléatoires jusqu’à l’identification
des procédés en génie chimique et en océanographie en passant par traitement d’images,
compression de données. En mécanique des fluides, la convergence rapide de l’énergie contenue
dans chaque mode POD justifie la représentation de l’organisation des structures à grandes
échelles par troncature aux premiers modes. Braud, (2003) montre, par une théorie
mathématique rigoureuse, qu’il est possible de reproduire même un comportement
chaotique correspondant aux caractéristiques d’un écoulement turbulent à partir d’un
système dynamique présentant trois degrés de liberté. L’approche POD suivie d’une
décomposition de Galerkin et le développement de la théorie des systèmes dynamiques constituent
alors des outils performants pour analyse de la réorganisation des structures cohérentes ainsi que
l’analyse de la stabilité et des bifurcations dans les écoulements. La première application de cette
décomposition POD est expérimentale et a été réalisée par Payne et Lumley (1967). Sirovich
(1987), a introduit la notion de Snapshot POD qui est réalisée classiquement à partir de données
possédant une résolution spatiale importante et une résolution temporelle plus faible, de type
simulation numérique directe ou DNS ou mesures de PIV.
Ce travail s’inscrit dans le cadre d’un Mastère à l’Ecole Nationale d’Ingénieurs de Monastir.

Réduction de modèle par POD ENIM 2007
Page 3 sur 55
L’étude consiste à développer un modèle de faibles dimensions à partir de réalisations issues
de l’expérimentation ou de la résolution numérique. Le développement fait appel aux techniques
de décomposition orthogonale aux valeurs propres (POD) et de Galerkin. La POD offre la
possibilité de décomposer les réalisations sur une base modale optimale moyennent des
coefficients de pondération. La troncature de cette base aux modes les plus énergétiques permet
compacter la taille des réalisations. Les coefficients issues de la décomposition POD sont très
dépendants des réalisations initiales et du temps d’échantillonnage. Afin de généraliser ces
coefficients, nous avons introduit la décomposition POD des réalisations dans les équations de
Navier-Stockes. Cette opération est connue sous le nom de la projection de Galerkin. La résolution
du jeu d’équations obtenu suite à la projection de Galerkin, permet de formuler un modèle pour
les coefficients POD. L’association de ce modèle avec les modes retenus suite à la troncature
forme un modèle d’ordre réduit à faibles dimensions pour l’écoulement étudié.
Par ailleurs, la troncature des modes POD à une faible dimension fait ignorer une partie de
l’énergie initiale des réalisationsnous avons utilisé une technique de calibration qui consiste à
corriger la viscosité en la majorant par un facteur à déterminer à partir de la conservation de
l’énergie entre les réalisations initiales et le modèle développé. L’information sur l’énergie étant
contenu dans les coefficients de la POD. Dans une première approximation nous avons supposé
que le facteur de majoration est constant pour tous les modes POD retenues.
Nous avons validé le modèle développé sur des réalisations numériques issues d’une
simulation DNS. La configuration étudiée est celle d’un écoulement autour d’un cylindre
(Re=200). L’écoulement étant caractérisé par une intense lâchée tourbillonnaire dans le sillage.
L’application de la POD a permis l’extraction des principaux modes de l’écoulement ainsi que les
coefficients de la dynamique de l’écoulement.
Par la suite, nous avons appliqué la routine développée sur une base de données expérimentale
traitant le cas d’un écoulement dans le sillage d’une plaque plane. Une configuration similaire à
celle du test de validation. Malgré le niveau important de bruit des mesures, la technique
développée a permis de produire un modèle à faibles dimensions satisfaisant qui permet de tenir
compte de la dynamique de l’écoulement étudié.

Réduction de modèle par POD ENIM 2007
Page 4 sur 55
Chapitre I - Décomposition Orthogonale aux valeurs Propres (POD)

Réduction de modèle par POD ENIM 2007
Page 5 sur 55
Dans ce chapitre, nous introduisons la technique POD et les différentes étapes de son
algorithme d’exécution ainsi que la réduction de modèle.
A - Présentation de la POD
La Décomposition Orthogonale aux valeurs Propres ou Proper Orthogonal
Décomposition (POD) est une technique élégante et très efficace d’analyse de données.
Elle permet d’approximer un système de dimension élevée par un autre de dimension
nettement plus faible. Essentiellement, cette méthode est une procédure linéaire, qui
consiste à déterminer une base de modes propres orthogonaux représentatifs par
définition (équation(I.2)) des réalisations les plus probables. Ces modes propres sont
obtenus par résolution d’une équation intégrale de Fredholm (équation (I.4)) dont le
noyau est construit à partir d’un ensemble de données provenant selon le cas de
simulations numériques ou d’expériences. Enfin, on peut montrer que ces fonctions
propres sont optimales au sens de la représentation énergétique (§ Chapitre I - A - 3 - ),
ce qui nous permet d’espérer pouvoir les utiliser pour construire un modèle réduit de
dynamique de l’écoulement.
Historiquement, la POD a été introduite en turbulence par Lumley (1967) comme une
méthode objective permettant d’identifier et d’extraire les structures cohérentes
d’un écoulement. Intuitivement, la POD peut être vue comme une idée naturelle pour
remplacer la décomposition de Fourier lorsque les directions de l’écoulement ne peuvent
plus être supposées homogènes ou périodiques. Ce problème étant assez général, cela
explique que la décomposition orthogonale ait été reprise de manière régulière au siècle
dernier. En effet, la POD est encore connue dans d’autres domaines scientifiques
sous le nom de Décomposition de Karhunen-Loève (Karhunen, 1946) ou analyse
d’Hotelling (Hotelling, 1933). Au delà du domaine historique d’application lié à la
turbulence, la POD couvre maintenant un vaste domaine d’utilisations regroupant
toutes sortes de disciplines. On la retrouve par exemple dans des applications au
traitement d’images pour la caractérisation de visages humains (Kirby et Sirovich,
1990) ou pour l’étude de l’activité neuronale (Sornborger et al., 2003), en analyse de
signal (Algazi et Sakrison, 1969), en compression de données (Andrews et al.,
1967) et beaucoup plus récemment en contrôle optimal (Ravindran, 2000a,b;
Afanasiev et Hinze, 2001). Le point central de toutes ces applications est
l’extraction des caractères dominants d’un ensemble de données, permettant

Réduction de modèle par POD ENIM 2007
Page 6 sur 55
d’accéder ainsi à une réduction de modèle.
1 - L’équation de Fredholm
Soit ( ), nX x t= une variable spatio-temporelle, considérons u(X ) un ensemble
d’observations, obtenu en Nt instants différents tn sur un domaine spatial noté
Ω. Par la suite, pour simplifier les notations, on considérera queX D +∈ = Ω× .
Selon le cas, ces observations seront des données expérimentales ou numériques
correspondant à des champs de vitesse, de vorticité, de température, ... Par ailleurs,
rien n’oblige à priori que les caractéristiques physiques du système ou les
paramètres de contrôle (nombre de Reynolds, par exemple) soient les mêmes pour
toutes les observations de la base de données (Christensen et al., 1998). Le problème à
résoudre consiste donc à extraire de ces champs considérés comme aléatoires, un mode
dominant ou encore structure cohérente. D’après Lumley (1967), une structure
cohérente correspond à la fonction déterministe la mieux corrélée en moyenne
aux réalisations u(X ). En d’autres mots, nous recherchons une fonction Φ qui
possède, au sens des moindres carrés, la plus grande projection sur les
observations i.e. qui maximise la quantité ( ) 2,u ψ . Or, puisque nous cherchons
uniquement à tester le parallélisme des fonctions Φ avec les observations, la
dépendance de l’amplitude de Φ doit être supprimée. Une manière de le faire est de
normaliser à 1, l’amplitude des fonctions Φ. Par conséquent, il est naturel de
s’intéresser à un espace de fonctions Φ pour lequel le produit scalaire existe. Un
choix naturel est donc d’imposer à Φ d’appartenir à l’espace des fonctions de carré
intégrable sur soit D, soit L2(D) Finalement, dans le but d’introduire les statistiques
relatives à l’ensemble des observations, nous allons chercher à maximiser l’expression :
( ) 2
2
,u ϕ
ϕ (I.1)
sous une certaine moyenne (temporelle, spatiale, moyenne de phase, ...) notée ici et que
l’on précisera au cas par cas. Le choix de l’opérateur de moyenne est au cœur des
différentes approches de la POD.
Par conséquent, d’un point de vue mathématique, la fonction Φ correspond
à la solution du problème d’optimisation avec contraintes suivantes :

Réduction de modèle par POD ENIM 2007
Page 7 sur 55
( )
( ) ( )2
2 2
2 2
, ,max
L D
u u
ψ
ψ ϕ
ψ ϕ∈= (I.2)
Avec
( ) 2, 1ϕ ϕ ϕ= =
Où ( ).,. .et représentent respectivement le produit scalaire canonique sur L2 et la norme
associée.
Bergmann 2004 a montré que le problème de maximisation (I.2) peut se
reformuler sous la forme d’un problème aux valeurs propres. Pour cela, il a introduit
l’opérateur ( ) ( )2 2: L D L Dℜ → définie par :
( ) ( ) ( ), ' ' 'D
X R X X X dXφ φℜ = ∫
Où ( ) ( ) ( )*, ' 'R X X u X u X= ⊗ est le tenseur des corrélations spatio-temporelles
en deux points.
A condition de supposer que l’on peut permuter les opérations de moyenne et
d’intégration, on obtient de manière évidente :
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) 2
, * ' ' ',
* ' ' '. *
* ' * ' '
,
D
D D
D D
R u X u X X dX X
u X u X X dX X dX
u X X dX u X X dX
u
ϕ ϕ ϕ ϕ
ϕ ϕ
ϕ ϕ
ϕ
= ⊗
= ⊗
=
=
∫
∫ ∫
∫ ∫
En pratiquant de la même manière, il a pu montrer également que
( ) ( ), ,R Rϕ ψ ϕ ψ= quelles que soient ( ) ( ) 2
2, L Dϕ ψ ∈
On en déduit alors que R est un opérateur linéaire, auto adjoint et positif sur L2(D). Par
conséquent, la théorie spectrale s’applique (Riesz et Nagy, 1955) et garantit que le
problème de maximisation (I.2) admet une solution égale à la plus grande valeur propre
du problème
Rϕ λϕ= (I.3)

Réduction de modèle par POD ENIM 2007
Page 8 sur 55
que l’on peut reformuler comme une équation intégrale de Fredholm, soit :
( ) ( ) ( )1
, ' ' 'cn
ij j ij D
R X X X dX Xϕ λϕ=
=∑∫ (I.4)
où nc est le nombre de composantes de u.
Dans l’équation(I.4), l’intégrale . 'D
dX∫ est définie sur tout le domaine D considéré.
Par conséquent, le tenseur des corrélations en deux points Rij devra être connu sur tout
le domaine D. Le volume de données correspondant peut alors devenir rapidement très
conséquent (plusieurs giga octets ne sont pas rares) et il est alors nécessaire de faire
appel à une procédure de compression de données pour réduire la taille du stockage
(Cordier et Bergmann, 2002b, par exemple). Cela explique en grande partie qu’il a fallu
attendre les développements importants des méthodes numériques et expérimentales qui
se sont produits au début des années 90 pour voir un renouveau de l’utilisation de la
POD.
A titre de remarque, on peut constater que le problème de maximisation (I.2)
revient encore à maximiser le quotient de Rayleigh défini par ( ) ( ),
²
Rr
ϕ ϕϕ
ϕ= sous la
contrainte que ² 1ϕ = . Une condition nécessaire pour la solution est que le gradient du
quotient de Rayleigh soit nul. Or, le gradient du quotient de Rayleigh se calcule de la
manière suivante :
( ) ( )2T
r R rϕ ϕ ϕ ϕϕ ϕ
∇ = −
Annuler celui-ci revient à imposer la condition :
( )R rϕ ϕ ϕ=
Le quotient de Rayleigh ( )r ϕ correspond donc à la valeur propre de l’opérateur R
associée au vecteur propreϕ . On retrouve ainsi le problème aux valeurs propres(I.3).
2 - Propriétés des fonctions de bases POD
A l’exception de l’optimalité de la POD, qui est discutée à la section Chapitre I -
A - 3 - , les propriétés principales des fonctions propres POD sont successivement

Réduction de modèle par POD ENIM 2007
Page 9 sur 55
présentées ici.
1. Dans un domaine d’intégration borné, la théorie de Hilbert-Schmidt in
Riesz et Nagy (1955) s’applique et assure l’existence d’une infinité
dénombrable de solutions au problème (I.5). L’équation de Fredholm
possède donc un ensemble discret de solutions satisfaisantes
( ) ( ) ( )1
, ' ' 'cn
j iij n n n
j D
R X X X dX Xϕ λ ϕ=
=∑∫ (I.5)
Où et in nλ ϕ représentent respectivement les valeurs propres et les fonctions
propres POD d’ordre 1,2,3...,n = +∞ . Chaque fonction propre est déterminée
comme solution du problème de maximisation (I.2) en imposant comme
contrainte supplémentaire d’être orthogonale à toutes les fonctions propres
trouvées précédemment. Ainsi, par construction, les fonctions propres sont
orthogonales mais, pour des raisons pratiques, elles sont généralement
choisies comme orthonormales.
2. L’opérateur R étant auto-adjoint et positif, toutes les valeurs propres sont
réelles et positives. Quitte à les rénuméroter, on peut toujours les indexer
par ordre décroissant :
1 2 ... 0λ λ λ+∞≥ ≥ ≥ f
Par ailleurs, ces valeurs propres forment une série convergente :
1n
n
λ+∞
=+∞∑ p
3. Les fonctions propres POD formant une base complète, toute réalisation u
pourra être reconstruite sur cette base :
( ) ( )1
ii n n
n
u X a Xϕ+∞
==∑
4. Par construction, les fonctions propres PODnϕ sont orthogonales deux à
deux. Toutefois, il est toujours possible de leur imposer d’être
orthonormales et de vérifier :
( ) ( )*
1
cni im n mn
i D
X X dXϕ ϕ δ=
=∑∫
5. Les coefficient de projection de u sur , ,naϕ peuvent alors être évalués en

Réduction de modèle par POD ENIM 2007
Page 10 sur 55
utilisant l’orthogonalité des fonctions propres.
( ) ( ) ( )*
1
,cn
in i n
i D
a u u X X dXϕ ϕ=
= =∑∫
6. La matrice des corrélations spatio-temporelle en deux points ijR peut se
décomposer en une série convergente (Courant et Hilbert, 1953) :
( ) ( ) ( )*
1
, ' 'i jij n n n
n
R X X X Xλ ϕ ϕ+∞
==∑
Ce résultat est connu sous le nom de théorème de Mercer.
7. Le théorème de Mercer, combiné avec la représentation de u sur la base
PODϕ , et en tenant compte de l’orthonormalité des fonctions propres POD
permet de montrer que les coefficients de projection na sont non corrélés
entre eux et que leur moyenne quadratique est égale aux valeurs propres de
la POD.
*n m mn na a δ λ= (I.6)
La démonstration de cette relation peut être trouvée dans Cordier et
Bergmann (2002a, page 22).
8. Finalement, le théorème de Mercer et l’orthonormalité des fonctions
propres POD conduisent à :
( )1 1
,cn
ii ni nD
R X X dX Eλ+∞
= =
= =∑ ∑∫ (I.7)
Si les réalisations u représentent des champs de vitesse alors E
correspond à l’énergie cinétique turbulente intégrée sur tout le
domaine D. Chaque structure d’ordre (n) contribue donc de manière
indépendante à l’énergie cinétique turbulente. L’amplitude des valeurs
propres λn mesure l’importance relative des différents modes POD pour la
représentation de l’écoulement.

Réduction de modèle par POD ENIM 2007
Page 11 sur 55
3 - Optimalité de la base POD
Soient u(X) une fonction telle que ( )2u L D∈ et au une approximation de u, nous
pouvons écrire sur une base orthonormale quelconque ( ) , 1,2,...,n X nψ = +∞ :
( ) ( )1
a ii n n
n
u X b Xψ+∞
==∑
Par ailleurs soient ( ) ( ) ( ) 1 2, ,...,X X Xϕ ϕ ϕ∞ , un ensemble de fonctions propres
POD orthonormales et 1 2, ,...,λ λ λ∞ les valeurs propres associées, nous pouvons
également considérer l’approximation ( )Piu X de u sur la base POD :
( ) ( )1
P ii n n
n
u X a Xϕ+∞
==∑
Les équations (I.6) et (I.7) indiquent clairement que si les vecteurs de la base
( )in Xψ sont non dimensionnés alors l’expression *
n mb b représente l’énergie cinétique
moyenne comprise dans le nième mode. Le lemme suivant (Cordier et Bergmann 2002b),
établi l’optimalité de l’approche POD.
* *
1 1 1
N N N
n m n n mn n n
a a b bλ= = =
= ≥∑ ∑ ∑
Par conséquent, parmi toutes les décompositions linéaires, la POD est la
plus efficace dans le sens où, pour un nombre donné de modes POD N , la
projection sur le sous-espace engendré par les N premières fonctions propres POD
contient en moyenne la plus grande quantité d’énergie cinétique possible.
B - Les différentes approches de la technique POD
1 - Méthode classique
Cette approche correspond à celle introduite par Lumley (1967). Dans ce cas, la
moyenne <·> est temporelle :
1.
T
dtT
= ∫

Réduction de modèle par POD ENIM 2007
Page 12 sur 55
Elle est évaluée à l’aide d’une moyenne d’ensemble en invoquant des hypothèses de
stationnarité et d’ergodicité .La variable X, quand à elle, est assimilée à la variable
( )x , ,x y z= définie sur tout le domaineΩ .
Figure I-1: Représentation classique de POD classique (Bergmann 2004)
Le problème aux valeurs propres correspondant se déduit facilement de l’équation (I.5)
en remplaçant le domaine d’intégration D par et la variable X par x. L’équation intégrale
de Fredholm à résoudre est donc :
( ) ( ) ( )1
, ' ' 'cn
j iij n n n
j
R x x x dx xϕ λ ϕ= Ω
=∑∫ (I.8)
Où ( ), 'ijR x x est le tenseur des corrélations spatiales en deux points définis par :
( ) ( ) ( ) ( ) ( )1
1, ' , ', '
PODNi j
ij i j n n nnT
R x x u x t u x t dt x xT
λ ϕ ϕ=
= = ∑∫
où T est une période de temps suffisamment longue sur laquelle les réalisations
( ),u x t sont connues. Dans cette approche, les fonctions propres sont purement spatiales.
a - Discussion sur la taille du problème aux valeurs propres.
Soit M le nombre de points de l’espace où sont connues les réalisations utilisées
pour déterminer la base POD et nc le nombre de composantes vectorielles de u
alors POD cN M x n= . Si l’on considère que les réalisations contenues dans la base de
données utilisée pour résoudre la POD ont été déterminées à partir d’une simulation
numérique détaillée d’un écoulement, ou mesurée par Vélocimétrie à Images de

Réduction de modèle par POD ENIM 2007
Page 13 sur 55
Particules (Particle Image Velocimetry ou PIV) alors ce nombre de points de grille M
peut rapidement devenir très important.
Enfin, considérons que le nombre de réalisations nécessaire pour décrire
l’écoulement est égal à Nt où Nt << M. Dans ces conditions, même si le problème aux
valeurs propres peut être résolu de manière précise, beaucoup de temps de calcul peut
être économisé en cherchant à résoudre uniquement un problème de taille Nt. Cette
remarque est au coeur de la méthode des snapshots présentée à la section suivante.
2 - Méthode snapshots
La méthode des snapshots, conçue par Sirovich (1987a,b,c), est l’exacte
symétrique de la POD classique.
L’opérateur de moyenne correspond alors à une moyenne spatiale évaluée sur tout
le domaine :
. dxΩ
= ∫
et la variable X est assimilée à t.
Figure I-2: Représentation schématique de la méthode des snapshots ( Bergmann 2004)
L’idée, à la base de la méthode, est de considérer que les fonctions propres
spatiales ( )xϕ peuvent s’écrire comme combinaison linéaire des réalisations
( ), kx x t contenues dans la base de données, soit :
( ) ( ) ( )1
,tN
k kk
x a t u x tϕ=
=∑ (I.9)

Réduction de modèle par POD ENIM 2007
Page 14 sur 55
On recherche alors les coefficients ( ) , 1,...,k ta t k N= tels que les fonctions propres
ϕ soient solution de l’équation(I.8). Le problème aux valeurs propres à résoudre est
donné par (Cordier et Bergmann (2002a)) :
( ) ( ) ( ), ' ' 'n n n
T
C t t a t dt a tλ=∫ (I.10)
Ou ( ), 'C t t est le tenseur des corrélations temporelles défini comme :
( ) ( ) ( ) ( ) ( )1
1 1, ' , , ' '
PODN
i i n nn
C t t u x t u x t dx a t a tT T =Ω
= = ∑∫
Les caractéristiques principales de la méthode des snapshots sont les suivantes :
1. Les fonctions propres ne dépendent que du temps.
2. Les corrélations croisées n’apparaissent pas dans le noyau du problème.
3. Il n’est pas nécessaire de faire appel à une hypothèse d’homogénéité pour
éventuellement diminuer la taille du problème aux valeurs propres.
4. Les réalisations sont supposées linéairement indépendantes.
5. La taille du problème aux valeurs propres (I.10) est égale à POD tN N= . Par
conséquent, comme cela a déjà été mentionné à la section 2 - Chapitre I - B
- 1 - , la méthode des snapshots permet de réduire de manière considérable
le coût numérique associé à la résolution du problème POD, lorsque M, le
nombre de points en espace est bien plus grand que Nt, le nombre
d’échantillons temporels. Pour cette raison, à chaque fois que cette
condition sera vérifiée, la méthode des snapshots sera préférée.
3 - Critère de choix de méthode des snapshots ou P OD classique?
Puisqu’il existe deux différentes approches POD, il est légitime de se demander
comment choisir au cas par cas la méthode la plus performante?
La réponse à cette question dépende essentiellement du type de données
accessibles pour évaluer le noyau du problème POD.
Les données issues de simulations numériques qu’elles soient directes ou aux
grandes échelles, sont souvent très bien résolues en espace et en temps. Cependant, en
raison du coût de calcul souvent important, seul un petit échantillon temporel est
disponible. De même, si une bonne résolution spatiale est obtenue par vélocimétrie par
images de particules, la résolution temporelle est souvent faible. Ces deux

Réduction de modèle par POD ENIM 2007
Page 15 sur 55
configurations, caractérisées par une histoire temporelle limitée et par une résolution
spatiale élevée, correspondent à des situations pour lesquelles le tenseur des corrélations
temporelles ( ), 'C t t est statistiquement bien convergé. De l’autre côté, les techniques
anémométriques fils chauds ou Laser Doppler fournissent une description temporelle
bien résolue et des échantillons temporels très longs mais s’accompagnent d’une
description spatiale très limitée. Dans ces conditions, c’est le tenseur des corrélations
spatiales en deux points ( ), 'ijR x x qui est alors bien convergé statistiquement.
4 - Troncature de la base POD La base POD étant optimale d’un point de vue énergétique, cela suggère qu’un
petit nombre de modes noté Ngal peut être suffisant pour obtenir une bonne
représentation de n’importe quelle réalisation u. Il reste alors à définir un critère
mathématique permettant de qualifier la notion qualitative évoquée plus haut.
Soit NPOD , le nombre de modes POD obtenus par résolution de l’équation de
Fredholm (I.5), l’erreur de troncature, commise en ne retenant que les Ngal premiers
modes POD pour représenter une réalisation u, est donnée par :
( ) ( ) ( ) ( )( ) ( )
( ) ( )( ) ( )
2
1
2
1
,
,
gal
POD
gal
N
gal n nn
N
n nn N
N u X u X X X
u X X X
ε ϕ ϕ
ϕ ϕ
=
= +
= −
=
∑
∑
(I.11)
Pour déterminer la valeur de Ngal , un critère possible est de minimiser
l’erreur (I.11). Cependant, en pratique, ce critère n’est jamais utilisé et la
détermination de Ngal est plutôt basée sur des considérations heuristiques.
En effet, l’équation (I.7) indique que 1
galN
nn
λ=∑ correspond à l’énergie moyenne contenue
dans les Ngal premiers modes de la POD. Par conséquent, pour capturer la majorité de
l’énergie contenue dans les NPOD modes de la POD, il suffit de choisir Ngal tel
que1 1
galN N
n nn n
λ λ= =
≈∑ ∑ . Par définition, le rapport 1 1
galN N
n nn n
λ λ= =∑ ∑ est le pourcentage d’énergie
cinétique total représentée par les NPOD modes POD à être contenu dans Ngal premiers
modes de la POD. Pour un pourcentage d’énergie prédéfini Pε , la dimension Ngal des sous

Réduction de modèle par POD ENIM 2007
Page 16 sur 55
espace engendré par les Ngal première fonctions propres POD peut être déterminée de
façon que la condition
( )( )
1
1
gal
POD
N
ngaln
NPOD
nn
E NP
E N ε
λ
λ
=
=
= ≥∑
∑
soit vérifiée (Ravindran, 2000b; Fahl, 2000; Cordier et Bergmann, 2002b).
Finalement, le sous-espace POD contenant un pourcentage d’énergie cinétique
turbulente supérieur à Pε % de l’énergie du système initial correspond à 1 2, ,...,galNϕ ϕ ϕ .
C - Conclusion
Jusqu’ici, seul l’aspect réduction de modèle associé à l’approximation d’une
réalisation quelconque par les fonctions propres POD a été évoqué. Or,
l’optimalité énergétique de la POD suggère également qu’un tout petit nombre de
modes POD devrait suffire pour décrire la dynamique du système. Par conséquent,
il semble raisonnable d’espérer construire, à partir d’une base de données issue de
simulations numériques ou d’expériences, un système dynamique d’ordre faible par
projection de Galerkin des équations d’état sur les modes POD. Bien qu’il n’existe
pas, à l’heure actuelle, de preuve de l’optimalité de la base POD en terme de
modélisation de la dynamique, cette approche a d’ores et déjà été utilisé avec succès, que
ce soit en turbulence (Aubry et al., 1988; Ukeiley et al., 2001) ou pour des
applications du contrôle optimal au contrôle d’écoulement (Ravindran, 1999, 2000a,b;
Afanasiev et Hinze, 2001).

Réduction de modèle par POD ENIM 2007
Page 17 sur 55
Chapitre II - : POD- ROM Méthodologie

Réduction de modèle par POD ENIM 2007
Page 18 sur 55
Ce chapitre est consacré à la réduction de modèle à base de POD. La technique de
projection de Galerkin est introduite ainsi que la calibration du modèle réduit.
A - Modèle d’ordre réduit basé sur la POD : POD ROM
1 - Projection de Galerkin
a - Généralités
La projection de Galerkin est un cas particulier des méthodes à résidus pondérés. Ces
méthodes sont généralement utilisées pour résoudre des systèmes d’équations
différentielles ordinaires ou aux dérivées partielles ou encore des équations intégrales.
Par exemple, dans notre cas, nous considérons l’équation :
( ) 0L u = (II.1)
Où L est un opérateur différentiel de ( )u x le champ scalaire inconnu défini sur
un domaineΩ . On cherche une approximation,%u , de la solution exacte, u . Le résidu de
l’équation (II.1) est définie par :
%( ) %( ) 0r u L u= = (II.2)
La meilleur approximation possible de u correspond à celle qui réduit au minimum
le résidu r pondéré par jw, fonctions quelconques, dites fonctions de pondération ou
encore fonction test, et cela de manière intégrale sur tout le domaine Ω. La méthode des
résidus pondérés consiste donc à annuler le résidu pondéré Rj , défini ainsi :
0, 1,..., .j jR w rd j nΩ
= Ω = =∫ (II.3)
Dans la méthode de Galerkin, les fonctions de poids sont choisies identiques aux
fonctions de base utilisées dans le développement de la solution approchée. Par
conséquent, si %u est approximée par
% ( ) ( )1
i ii
u x xχ ϕ∞
==∑ (II.4)
Où ( )i xϕsont les fonctions de base et iχ les coefficients à déterminer, alors les

Réduction de modèle par POD ENIM 2007
Page 19 sur 55
fonctions de poids sont telles que ( ) , 1,...,j jw x jϕ= = +∞. Le fait que u appartienne à
un espace vectoriel de dimension infinie est une difficulté pratique. L’étape de
discrétisation de la méthode de Galerkin consiste à tronquer la somme intervenant
dans l’équation (II.4) à un indice fini, noté imax , transformant ainsi le problème en
dimension finie. Par conséquent, l’équation (II.3) devient :
( ) %( ) max0, 1,..., .j x L u d j iϕΩ
Ω = =∫ (II.5)
Soit encore, en utilisant un produit scalaire homogène à celui considéré dans
l’équation (II.18) :
( )max
max1
, 0, 1,..., .i
i i ji
L x j iχ ϕ ϕ=
= =
∑ (II.6)
Finalement, la projection de Galerkin revient à imposer aux imax produits
scalaires définis par l’équation (II.6) de s’annuler.
Pour qu’une telle méthode fonctionne, nous devons nous assurer que les deux
conditions suivantes soient vérifiées (Rempfer, 1996) :
1. les fonctions de base ( )i xϕ doivent former un espace complet et, pour des raisons
pratiques qui deviendront évidentes à la section suivante, il est préférable que celles-ci
forment une base orthonormée.
2. les fonctions de base doivent satisfaire les conditions aux limites du problème.
b - Modèles d’ordre faibles basés sur la POD
En raison de leurs propriétés (§ Chapitre I - A - 2 - ), les fonctions de base POD,
( )i xϕ , sont bien appropriées pour être utilisées dans une projection de Galerkin.
Nous allons Considérer les équations de Navier Stokes écrites pour un fluide
incompressible étudié dans un domaine Ω :
( )uF u
t
∂ =∂
(II.7)
Où F est un opérateur différentiel spatial, ( ), , et 0u u x t x t= ∈Ω ≥ . A ces équations
sont ajoutées des conditions initiales ( ) ( )0, 0u x t u x= = et des conditions aux limites. En
mécanique des fluides, ces équations peuvent être utilisées dans le cadre d’un problème
de contrôle (instationnaire) de paroi. Supposons que les frontières Γ du domaine Ω

Réduction de modèle par POD ENIM 2007
Page 20 sur 55
peuvent se décomposer en des frontières Γc sur lesquelles le contrôle est appliqué et des
frontières Γ \ Γc non contrôlées. Les conditions aux limites s’écrivent alors :
( ) ( ) ( ), pour ,cu x t t c x xγ= ∈Γ (II.8)
( ) ( ), pour \ ,cu x t g x x= ∈Γ Γ (II.9)
Dans ces équations, γ(t) peut être interprété comme la variation temporelle de la
fonction spatiale c(x) sur Γc .
Le champ vectoriel u peut être projeté sur l’espace de dimension NPOD défini par
les vecteurs propres POD( )i xϕ , correspondant aux modes les plus énergétiques de
l’écoulement :
( ) ( ) ( )1
,galN
i ii
u x t a t xϕ=
=∑ (II.10)
En introduisant l’expression (II.10) de u dans l’équation(II.7), on obtient :
( ) ( ) ( )1 1
gal galN Ni
i i ii i
dax F a t x
dtϕ ϕ
= =
=
∑ ∑
Les fonctions ( )i xϕ formant une base, la relation précédente se réécrit :
( ) ( ) ( )1 21
, ,...,gal
gal
Ni
i j N ji j
dax F a a a x
dtϕ ϕ
=
=∑ ∑ (II.11)
Compte tenu de l’orthonormalité des fonctions propres POD, une projection de
Galerkin des équations (II.11) sur la base ( )n xϕ donne :
( )1 2, ,..., , 1,...,gal
nn N gal
daF a a a n N
dt= = (II.12)
L’opérateur F représentant les termes convectifs et diffusifs des équations de
Navier Stokes, l’opérateur F fait en général intervenir des combinaisons linéaires et
quadratiques des coefficients temporels an(t).
Pour que le système (II.12) soit bien posé, nous lui ajoutons les conditions
initiales ( ) 00n na t a= = avec ( ) ( )( )00 ,n na u x xϕ= .
En résumé, nous avons montré qu’en réalisant une projection de Galerkin sur les
fonctions de base POD, les équations de Navier Stokes pouvaient être approchées

Réduction de modèle par POD ENIM 2007
Page 21 sur 55
par un système dynamique d’ordre réduit (non- linéaire), représenté mathématiquement
par des Equations Différentielles Ordinaires (Ordinary Differential Equations, ODE).
c - Conditions aux limites
Nous avons montré, précédemment, que les fonctions POD ( )n xϕ , peuvent s’écrire
de manière linéaire en fonction des réalisations ( ),u x t :
( ) ( ) ( )1,n n
n T
x u x t a t dtT
ϕλ
= ∫ (II.13)
Où nλ représente les valeurs propres de la matrice de corrélation temporelle.
La relation (II.13) montre que les fonctions de base nϕ héritent des
propriétés qui peuvent s’écrire de manière linéaire et homogène en fonction des champs
de vitesse u. En particulier, dans le cas où les équations de Navier Stokes sont résolues
sur un domaine muni de conditions aux limites homogènes, i.e. u(x, t) = 0, alors les
fonctions de base POD vérifient également des conditions aux limites homogènes.
Dans ce cas, la décomposition suivante, réalisée sur les Ngal premiers modes POD,
peut être utilisée :
% ( ) ( ) ( )1
,galN
i ii
u x t a t xϕ=
=∑
Où %u est une approximation de Galerkin de la solution exacte de u des équations
de Navier Stokes.
Si maintenant les équations de Navier Stokes sont munies de conditions aux
limites non homogènes pour les vitesses, i.e. ( ), 0u x t = sur certaines frontières du
domaine de calcul, alors les fonctions de base POD ne peuvent plus être utilisées dans la
projection de Galerkin comme le montre l’équation(II.13). L’objectif est alors de
transformer le problème initial muni de conditions aux limites non homogènes en un
problème muni de conditions aux limites homogènes.
Si les conditions aux limites sont indépendantes du temps, i.e. si ( ) ( ),u x t f x= ,
nous calculons une base POD correspondante aux fluctuations des champs de
vitesse autour de la moyenne temporelle ( )mu x . Les fonctions de base POD sont alors

Réduction de modèle par POD ENIM 2007
Page 22 sur 55
estimées à l’aide des données modifiées ( ) ( ) ( ) ( ) 1, ,..., ,tm N mu x t u x u x t u x− − où tN est le
nombre de réalisations disponibles. Par construction, les champs ( )mu x et donc
( ) ( ), mu x t u x− sont à divergence nulle. Le champ moyen ( )mu x vérifie les
conditions aux limites non homogènes du problème et donc, le champ
( ) ( ) ( ), ,POD mu x t u x t u x= − vérifie, lui, des conditions aux limites homogènes.
En résumé, la base POD peut être déterminée dans le cas de conditions
aux limites non homogènes et indépendantes du temps par la décomposition suivante :
( ) ( ) ( ) ( )1
,galN
m i ii
u x t u x a t xϕ=
= +∑ (II.14)
Cette relation peut s’écrire de manière condensée
( ) ( ) % ( )1
,gal
gal
NNsi i
i
a t x u x tϕ=
=∑
En posant
% ( ) ( ) ( ), ,galN
s mu x t u x t u x= −
Les conditions aux limites non homogènes peuvent également dépendre du temps,
i.e. u(x, t) = f (x, t). Ce cas est très courant dans des problèmes de contrôle
instationnaire avec contrôle frontière par exemple. Afin de rendre les conditions aux
limites homogènes, nous adoptons la méthode de la fonction de contrôle Graham et al.
(1999a, b), Ravindran (2000a, b) et Fahl (2000), qui consiste à utiliser la décomposition
suivante :
( ) ( ) ( ) ( ) ( ) ( )1
,galN
m c i ii
u x t u x t u x a t xγ ϕ=
= + +∑ (II.15)
Cette relation peut également s’écrire de manière condensée :
( ) ( ) % ( )1
,gal
gal
NNci i
i
a t x u x tϕ=
=∑
En posant
% ( ) ( ) ( ) ( ) ( ), ,galN
c m cu x t u x t u x t u xγ= − −
La décomposition du champ de vitesse sur g a lN modes propres POD dans le cas

Réduction de modèle par POD ENIM 2007
Page 23 sur 55
d’un système contrôlé.
Ici ( )cu x est un champ de vitesse de référence traduisant de quelle manière le
contrôle ( ) ( )ct u xγ affecte l’écoulement. Le champ ( )cu x correspond aux conditions
aux limites suivantes :
( )
0 c
c
c x sur
sur
Γ
Γ Γ
Ainsi, le champ % ( ) ( ) ( ) ( ) ( ), ,galN
c m cu x t u x t u x t u xγ= − − vérifie des conditions aux
limites homogènes et peuvent être utilisées dans une projection de Galerkin.
2 - Détermination des fonctions de base POD
Afin de déterminer les fonctions de base POD, nous avons utilisé la
décomposition(II.14). En définissant% ( ) ( ) ( ), ,galN
s i i mu x t u x t u x= − , le calcul des fonctions
de base s’effectue en plusieurs étapes :
1. Calcul du champ moyen ( )mu x obtenu sur l’ensemble des réalisations
( ) 1,...,
,t
i i Nu x t
= :
( ) ( )1
1,
tN
m iit
u x u x tN =
= ∑
2. Calcul de la matrice de corrélations temporelles Composantes ijc :
% ( ) % ( ), . , .gal galN N
s sij i jc u x t u x t dxΩ
= ∫
3. Calcul des valeurs propres 1,..., tNλ λ et des vecteurs propres
temporels 1,..., tNψ ψ , de la matrice C.
4. Calcul des fonctions POD spatiales iϕ par combinaison linéaire des
vecteurs propres temporels iψ et des réalisations et des réalisations % galNsu :
( ) ( ) % ( )1
,t
galN
Nsi i j j
j
x t u x tϕ ψ=
=∑
5. Normalisation des fonctions de base :

Réduction de modèle par POD ENIM 2007
Page 24 sur 55
ii
i
ϕϕϕ
=
3 - Détermination des coefficients de projection t emporels
Les coefficients de projection temporels ( ) ( )i ia t a tτ = peuvent se calculer
simplement en projetant la relation (II.14) sur la base POD. On a donc :
% ( ) ( )( ) ( ) ( ) ( )1
, , ,gal
gal
NNs j i i j
i
u x t x a t x xϕ ϕ ϕ=
= ∑
Compte tenu de l’orthonormalité de la base POD 1,..., PODϕ ϕ, les coefficients de
projection temporels se déterminent simplement de la manière suivante :
( ) % ( ) ( )( ), ,galNsj ja t u x t xϕ=
4 - Détermination des coefficients de prédiction tempor els
Les coefficients de prédiction temporels sont, calculés par résolution d’un système
dynamique d’ordre réduit. Ce système est déterminé en réalisant une projection de
Galerkin des équations de quantité de mouvement du modèle de Navier Stokes sur les
fonctions de base POD, déterminées précédemment :
( ) 1, . ,
Rei i
uu u p u
tϕ ϕ∂ + ∇ = −∇ + ∆ ∂
Après intégrations par partie, en utilisant la formule de Green, on abouti à :
( ) ( ) ( )( ) [ ] ( )1 1, . , . ,
Re ReT
i i i i i
uu u p u p u
tϕ ϕ ϕ ϕ ϕ∂ + ∇ = ∇ − ∇ ⊗ ∇ ⊗ − + ∇ ⊗ ∂
(II.16)
On constate que des termes faisant intervenir le champ de pression sont présents
dans l’équation (II.16). Le champ de pression ne se décomposant pas à priori sur la
même base que les champs de vitesse, la pression ne peut pas être facilement utilisé
dans une projection de Galerkin. On souhaite alors éliminer les termes de pression
indésirables. Le développement du champ de vitesse (II.14) est alors utilisé.
L’introduction de ce développement dans l’équation de continuité . 0u∇ = impose aux
fonctions de base d’être à divergence nulle, soit. 0iϕ∇ = . Le terme ( ), . ip ϕ∇ présent dans
l’équation (II.16) est alors égal à zéro.

Réduction de modèle par POD ENIM 2007
Page 25 sur 55
Le terme de pression [ ]ipϕ− s’annule sous plusieurs configurations :
Pression nulle : Ce terme s’annule sur toutes les frontières où la pression
de référence p est égale à zéro. Ceci est couramment le cas sur la
frontière d’entrée, Γe , du domaine de calcul. Parfois, cette condition
est appliquée sur la frontière de sortie pour des écoulements cisaillés
(Deane et al., 1991)
Conditions aux limites homogènes : Le terme de pression s’annule sur
les frontières où des conditions aux limites homogènes peuvent être
obtenues pour les fonctions de base iϕ , i.e. 0iϕ = . C’est le cas, par
exemple, des domaines d’écoulements possédant des frontières rigides
(Fahl, 2000, dans le cas d’une cavité).
Conditions aux limites périodiques : Lorsque des conditions aux limites
périodiques sont appliquées sur les frontières du domaine de calcul, le
terme de pression s’annule (Deane et al., 1991). Pour un écoulement de
canal simulé avec des conditions aux limites périodiques, le terme de
pression a alors une contribution nulle.
Frontières parallèles à l’écoulement : Ce terme s’annule également sur
les frontières qui sont locale- ment parallèles à l’écoulement car on a
alors . 0i nϕ = . Cette condition est vérifiée sur les frontières Γinf et Γsup. En
cas d’application du contrôle sur le cylindre, cette condition est également
vérifiée sur la frontière Γc.
Conditions aux limites "naturelles" : La combinaison du terme de
pression [ ]ipϕ− et du terme de vitesse ( )1
Re iu ϕ∇ ⊗ , peut s’annuler. Cette
combinaison est principalement effectuée sur la frontière de sortie ou
l’impose les conditions aux limites suivantes (Ravindran, 2000a) :
10 et 0
Re
u vp
x x
∂ ∂− + = =∂ ∂
Dans ce qui suit nous allons considérer des conditions aux limites « naturelles »

Réduction de modèle par POD ENIM 2007
Page 26 sur 55
B - Application au contrôle actif des écoulements
Le but ultime de ce travail est le contrôle de manière optimale des écoulements de
fluides visqueux et incompressibles. Prandtl (1925) a été l’un des premiers à
s’intéresser au contrôle d’écoulements d’un point de vue expérimental, en essayant de
retarder le décollement d’une couche limite. Cependant, avec Gad-el-Hak, (2002) et
Gunzburger, (1995) il y’a eu un regain d’intérêt pour le contrôle actif en mécanique des
fluides
Dans un problème d’optimisation numérique en Mécanique des Fluides, les
systèmes matriciels obtenus après discrétisation spatiale sont généralement de grande
taille. Or, les procédures d’optimisation étant souvent itératives, il est nécessaire de
résoudre les équations d’état un grand nombre de fois, ce qui représente au final la
majeure partie des temps de calcul. Il existe donc une réelle nécessité de développer des
modèles d’ordre réduit (Reduced Order Model, ROM) susceptibles d’approximer les
modèles discrétisés d’ordre élevé au cours du processus d’optimisation. Un grand
nombre de bases peut être utilisé pour réduire l’ordre des modèles, citons les
bases de Lagrange, d’Hermite, de Taylor, les bases POD, ...
Précédemment, il a été démontré que les fonctions propres POD formaient une
base complète de fonctions orthonormales, c’est à dire que chaque réalisation spatio-
temporelle u(x,t) pouvait se décomposer sur cette base de la manière suivante :
( ) ( ) ( )1
,PODN
n nn
u x t a t xϕ=
= ∑ (II.17)
Avec
( ) ( ) ( )( ) ( ) ( ), , , .n n n
D
a t u x t x u x t x dxϕ ϕ= = ∫ (II.18)
Ou ( )n xϕ sont les fonctions propres spatiales POD et NPOD, le nombre total de
modes POD.
L’objectif est d’utiliser la convergence optimale énergétique des fonctions de base
POD pour construire un système dynamique d’ordre réduit pour les coefficients
temporels ( )na t . Une méthode classique pour obtenir ce type de système consiste à
utiliser une projection de Galerkin des équations d’état sur la base POD. Cette
méthode de Galerkin, permet d’obtenir, à partir d’un ensemble de réalisations ( ),u x t issu
par exemple d’une configuration non contrôlée de l’écoulement, un modèle d’ordre

Réduction de modèle par POD ENIM 2007
Page 27 sur 55
réduit des équations de Navier Stokes, capable de représenter la dynamique de la
configuration de départ.
1 - Système d’équation sans contrôle
On considère alors l’équation suivante :
( ) ( )( ) ( )1 1, . ,
Re ReT
i i i
uu u u u
tϕ ϕ ϕ∂ + ∇ = − ∇ ⊗ ∇ ⊗ + ∇ ⊗ ∂
(II.19)
L’introduction du développement (II.14) dans l’équation (II.19) donne le système
dynamique suivant :
( ) ( ) ( ) ( )1 1 1
gal gal galN N Ni
i ij j ijk j kj j k
da tA B a t C a t a t
dt = = =
= + +∑ ∑∑ (II.20)
muni de la condition initiale
( ) ( ) ( )( )00 , ,i ia u x t t xϕ= = pour 1,..., gali N=
Les coefficients A, B et C intervenant dans le système dynamique (II.20) s’écrivent :
( )( ) ( )( ) ( )1 1, . ,
Re ReT
i i m m i m m iA u u u uϕ ϕ ϕ= − ∇ − ∇ ⊗ ∇ ⊗ + ∇ ⊗
( )( ) ( )( ) ( )( ) ( )1 1, . , . ,
Re ReT
ij i m j i j m i j j iB u uϕ ϕ ϕ ϕ ϕ ϕ ϕ ϕ = − ∇ − ∇ − ∇ ⊗ ∇ ⊗ + ∇ ⊗
( )( ), .ijk i j kC ϕ ϕ ϕ= − ∇
2 - Système d’équation avec contrôle
La méthode générale est identique à celle présentée au paragraphe précédent. Les
seules différences sont :
la méthode de la fonction de contrôle est mise en œuvre : la
décomposition (II.15) est utilisée afin de prendre en compte le contrôle
dans le système POD.
le champ moyen est calculé de la façon suivante :
( ) ( ) ( ) ( )( )1
1,
tN
m cit
u x u x t t u xN
γ=
= −∑ (II.21)

Réduction de modèle par POD ENIM 2007
Page 28 sur 55
Le système dynamique réduit représentant l’écoulement contrôlé peut finalement
s’écrire pour 1,..., gali N=
( ) ( ) ( ) ( ) ( ) 2
1 1 1 1
gal gal gal galN N N Ni
i ij j ijk j k i i ij j ij j k j
da t dA B a t C a t a t D F a t G
dt dt
γ ε γ γ= = = =
= + + + + + +
∑ ∑∑ ∑ (II.22)
Ces équations sont munies de la condition initiale
( ) ( ) ( )( )00 , ,i ia u x t t xϕ= = pour 1,..., gali N=
Des termes supplémentaires D, E, F et G interviennent dans le système(II.22). Ces termes
dépendent de la fonction de contrôle, uc et s’écrivent
( ),i i cD uϕ= −
( )( ) ( )( ) ( )( ) ( )1 1, . , . ,
Re ReT
i i c m i m c i c c iu u u u u uε ϕ ϕ ϕ ϕ= − ∇ − ∇ − ∇ ⊗ ∇ ⊗ + ∇ ⊗
( )( ) ( )( ), . , .ij i j c i c jF u uϕ ϕ ϕ ϕ= − ∇ − ∇
( )( ), .i i c cG u uϕ= − ∇
3 - Technique de calibration du système POD ROM
On se propose ici d’optimiser le système d’ordre faible afin de restituer au mieux
l’information contenue sur chaque mode et cela à chaque instant.
La divergence de la solution du système dynamique (II.22) peut provenir de
l’erreur commise en négligeant le terme de pression sur la frontière de sortie lors de la
construction des coefficients intervenant dans le système réduit. Une autre explication,
plus probable, peut également être avancée. Les fonctions de base POD retenues pour
construire un modèle réduit de dynamique sont représentatives des caractères
énergétiques dominants d’un écoulement, générés par les grosses et moyennes structures.
Les plus petites structures sont, quant à elles, négligées du fait de leur faible apport
énergétique. Or, la dissipation visqueuse s’effectue principalement dans les petites
structures de l’écoulement. Par conséquent, le système POD ne dissipe pas assez
d’énergie et les modes prédits s’amplifient au cours du temps. Il convient donc de
modéliser les interactions entre les modes calculés (grandes échelles) et les modes non
résolus (petites échelles). En s’inspirant encore une fois de la Turbulence, une
modélisation naturelle d’interactions consiste à ajouter des viscosités artificielles dans le
système dynamique POD afin de le rendre plus dissipatif.

Réduction de modèle par POD ENIM 2007
Page 29 sur 55
La méthode la plus évidente est d’ajouter une viscosité globale dans le système
POD ROM. Ainsi, la viscosité ν du système POD, représentée par l’inverse du nombre
de Reynolds, sera remplacée parτν ν+ , où, par analogie avec la Turbulence, τν est une
viscosité tourbillonnaire à déterminer. La viscosité ν est donc multipliée par un facteur
correctif (1 + c) où c est une constante qu’il reste à évaluer. Concrètement, cela
revient à remplacer dans le système POD ROM, le terme 1 1
par Re Re
c+
Rempfer et Fasel (1994) puis Rempfer (1996) prolongent cette idée et considèrent
que chaque mode propre dissipe une certaine quantité d’énergie. Selon eux, il est donc
préférable d’ajouter une viscosité tourbillonnaire différente sur chacun des modes POD.
Ainsi, en conservant le formalisme précédent, et en supposant que iν est la
viscosité contenue sur le ième mode, la viscosité totale sur le ième mode devient
( )1 icν + , ce qui revient encore à remplacer 1
Re dans le système POD ROM par
1
Reic+.
Rempfer considère que cette viscosité tourbillonnaire, prise en compte par
l’intermédiaire du terme ci , varie comme une fonction linéaire des modes POD, soit :
xic K i= où K est une constante à déterminer.
Selon les traveaux de Cazemier (1997) et Cazemier et al. (1998), nous utilisons
des équations de transport de l’énergie cinétique modale afin de déterminer les viscosités
à ajouter au système POD ROM pour le stabiliser. Nous supposons que l’absence
d’interaction avec les modes non-résolus se traduit sur le système par une croissance
linéaire des coefficients de prédiction temporels. Pour éviter ce problème, nous ajoutons
alors un terme d’amortissement linéaire dans le système. Le système POD ainsi construit
s’écrit :
( )1 1 1
gal gal galN N Ni
i ij j ijk j k i ij j k
da tA B a C a a H a
dt = = =
= + + +∑ ∑∑ (II.23)
L’énergie contenue dans la directioniϕ , par le iéme modes, est2ia . La dérivée temporelle
de l’énergie du mode i est alors :
( )2
2i ii
da t daa
dt dt=

Réduction de modèle par POD ENIM 2007
Page 30 sur 55
L’équation de transport de l’énergie s’écrit donc :
( )2
1 1 1
2 2 2 2gal gal galN N N
ii i ij i j ijk i j k i i i
j j k
da ta A B a a C a a a H a a
dt = = =
= + + +∑ ∑∑
En moyenne l’énergie doit se conserver i.e 2
0ida
dt= . On a donc :
( )2
1 1 1
2 2 2 2 0gal gal galN N N
ii i ij i j ijk i j k i i i
j j k
da ta A B a a C a a a H a a
dt = = =
= + + + =∑ ∑∑
Si la solution du système POD ROM est sur l’attracteur du système dynamique alors les
propriétés de la POD imposent que i j i ija a λ δ= et que 0ia =
Soit :
1 1
0gal galN N
ijk i j k i ii i ij k
C a a a B Hλ λ= =
+ + =∑∑
Finalement, on obtient :
1 1
1 gal galN N
i ijk i j k iij ki
H C a a a Bλ = =
= − −∑∑ (II.24)
L’équation (II.24) obtenue, sera résolue en premier lieu, afin d’obtenir les
coefficients iH qui seront injecter dans (II.23) pour assurer la correction des coefficients ( )na t .
C - Implémentation sur l’environnement Matlab
Afin de mettre cette méthode de réduction de modèle par POD en exécution, nous avons
fait appel au Matlab comme logiciel de programmation, qui permet à la fois d’avoir une interface de
communication facile entre l’utilisateur et le PC et de faire sortir les résultat sous une base de
données qui pourrait par la suite être afficher (Figure II-1).
La routine développée est divisée en trois sous routine
1. La décomposition POD (Calcul des modes, des coefficients, troncature)
2. POD ROM
3. La calibration par ajout de la viscosité

Réduction de modèle par POD ENIM 2007
Page 31 sur 55
Figure II-1 : Interface du programme de calcul
Dans notre travail nous nous sommes intéressés à l’étude des champs de vitesse issue de la
PIV, et comme il a été discuté dans la section Chapitre I - B - 3 - du choix des méthodes, nous
allons opter pour la méthode des Snapshots.
Sachant que la famille d’observations discrètes ( ) 1,...,,
tk k N
u x t=
prises à des
instants ( )1 1,..., 1t t N t+ − ∆ , la matrice de corrélation temporelle s’écrit dans ce cas :
( ) ( ) ( )( )1, , , ,i jC i j u x t u x t
N= (II.25)
Cette matrice est bien évidemment symétrique et définie positive. Elle est donc
diagonalisable, et admet pour valeurs propres 1 2 ... 0Nλ λ λ> > > > qui ont été ordonnées dans le
sens décroissant. Notons par ( ) ( ) ( )1 2, ,..., NV V V les vecteurs propres associées à ces valeurs propres
(issues de la diagonalisation de( ),C i j )
Ces vecteurs vérifient la propriété suivante :
( ) ( )( ) 1,k l
klk
V VN
δλ
=
Le mode d’ordre k de la décomposition POD, associé à la valeur propre kλ s’écrit dans ce
cas :
( )( )
( )1
,kN
jk j
j k
Vx u x t
Nϕ
λ==∑

Réduction de modèle par POD ENIM 2007
Page 32 sur 55
Dans la pratique, au lieu de formuler le problème comme présenté dans l’équation (II.25) ,
il est préférable de définir la matrice de corrélation temporelle sous la forme suivante :
( ) ( ) ( ) ( ) ( )( )1, , , ,i jC i j u x t u x u x t u x
N= − −
Où
( ) ( )1
1,
N
ii
u x u x tN =
= ∑
Dans ce cas le champ ( ),u x t peut s’écrire :
( ) ( ) ( ) ( )1
,N
k kk
u x t u x a t xϕ=
= +∑
D - Conclusion
Dans ce chapitre, nous avons exposé les différentes étapes de l’obtention d’un modèle
d’ordre réduit POD ROM.

Réduction de modèle par POD ENIM 2007
Page 33 sur 55
Chapitre III - : Résultats et discussions

Réduction de modèle par POD ENIM 2007
Page 34 sur 55
Dans ce chapitre, nous présentons une validation de algorithme développé en utilisant un
ensemble de réalisation DNS avant d’appliquer cette routine sur des réalisations issues de
l’expérience obtenue par PIV.
A - Validation par un champ numérique
La base de données employée à été fournie amicalement par les collègues de l’IMFT. Elle
représente un ensemble réalisations numériques issues d’une simulation DNS d’un écoulement
derrière un cylindre.
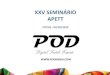
Le champ moyen est représenté sur la Figure III-1, les caractéristiques de l’écoulement
étudié sont les suivantes (Bergmann 2004) :
o Ecoulement autour d’un cylindre (non contrôlé)
o Le nombre de Reynolds =200
o La période est égale 6 s
o La résolution est de 230 x 200
Figure III-1 : Champ moyen de vitesse

Réduction de modèle par POD ENIM 2007
Page 35 sur 55
1 - Analyse POD La décomposition en modes propres orthogonaux (POD) basée sur la méthode des «
snapshots » permet de projeter chaque réalisation, dont on a soustrait la moyenne d’ensemble
( ) >< txU ,r
du champ de vitesse, sur une base modale suivant la relation :
200
1
( , ) ( ). ( )nnn
u x t a t xϕ=
=∑r r ur r
(III.1)
Dans la suite, les valeurs propres nλ associées aux modes )(xnφ sont rangées dans l'ordre
décroissant. nλ représente la contribution du mode )(xnφ à l’énergie totale de l’écoulement
fluctuant.
2 - Valeurs propres
Nous donnons dans le tableau suivant les valeurs propres associées aux premiers modes. On
remarque que chaque paire de modes successifs présente un poids énergétique de même ordre. Le
premier et le deuxième mode contiennent chacun plus de 46% de l’énergie totale. Le poids de ces
deux modes est supérieur à 96%. Ceci explique l’importance de ce mode dans la structure globale
de l’écoulement. Les deux modes suivants (3 et 4) contiennent moins d’énergie (46 fois plus faible),
mais la somme de leur énergie ne dépasse pas les 2%. La contribution énergétique individuelle des
modes suivants est plus marginale. Cette analyse énergétique montre que les quatre premiers modes
fluctuants contiennent plus de 98 % de l’énergie du signal. Une troncature dans la décomposition à
l’ordre 4 sera étudiée dans la suite de ce travail.
Numéro du mode Poids énergétique (%) Somme cumulée (%)
1 50.40% 50.40% 2 46.10% 96.40% 3 1.00% 97.50% 4 1.00% 98.50%
Tableau III-1 : Valeurs propres fournies par le calcul POD
3 - Modes propres Nous présentons, sur la Figure III-2 , Figure III-5 , Figure III-4 et Figure III-5 les quatre
premiers modes spatiaux issus de l’analyse POD. Il apparaît très clairement que les modes sont
deux à deux complémentaires.
Les deux premiers modes (Figure III-2 et Figure III-5) possèdent une structure spatiale axi-
antisymétrique : les structures tourbillonnaires associées au mode 2 sont décalées spatialement d’un

Réduction de modèle par POD ENIM 2007
Page 36 sur 55
quart de longueur d’onde sur l’axe de symétrie par rapport à celles du mode d’ordre 1. Une certaine
forme d’organisation de ces structures est visible. On observe l’alternance de l’apparition sur l’axe
médian de structures contrarotatives. C’est pourquoi les valeurs propres correspondantes sont
pratiquement du même ordre de grandeur.

Réduction de modèle par POD ENIM 2007
Page 37 sur 55
Figure III-2 : Premier mode propre fluctuant issu de la décomposition POD :
représentation du champ de vitesse (en haut), et la carte de la norme (en bas).

Réduction de modèle par POD ENIM 2007
Page 38 sur 55
Figure III-3 : Deuxième mode propre fluctuant issu de la décomposition POD :
représentation du champ de vitesse (en haut), et la carte de la norme (en bas).

Réduction de modèle par POD ENIM 2007
Page 39 sur 55
Les modes 3 et 4 (Figure III-4 et Figure III-5), quant à eux, ne le sont plus. Une forme
d’évolution par convection d’un mode à un autre est visible : les modes 3 et 4 doivent donc aussi
être associés.
Figure III-4 : Troisième mode propre fluctuant issu de la décomposition POD :
représentation du champ de vitesse (en haut), et la carte de la norme (en bas).

Réduction de modèle par POD ENIM 2007
Page 40 sur 55
Figure III-5 : Quatrième mode propre fluctuant issu de la décomposition POD :
représentation du champ de vitesse (en haut), et la carte de la norme (en bas).

Réduction de modèle par POD ENIM 2007
Page 41 sur 55
4 - Coefficients
Les deux premiers coefficients (Figure III-6) possèdent une bonne prédiction au niveau de
la projection de Galerkin. Nous remarquons que les courbes coïncident parfaitement, sachant que
les deux premiers modes emmagasinent 96.4% de l’énergie cinétique, la reconstruction du champ
de vitesse à partir de ces deux modes serai donc fiable.
Figure III-6 Représentation des coefficients a1 et a2 issus de la décomposition POD (Valeurs discrète), de la
projection de Galerkin et de la calibration des cœfficients de la projection de Galerkin

Réduction de modèle par POD ENIM 2007
Page 42 sur 55
Les coefficients a3 et a4 (Figure III-7), quant à eux, ne le sont plus. Il y’a eu une légère
différence au niveau de la projection de Galerkin et qui a été corrigé un petit peu avec la calibration.
Figure III-7 Représentation des coefficients a3 et a4 issus de la décomposition POD (Valeurs discrète), de la
projection de Galerkin et de la calibration des cœfficients de la projection de Galerkin

Réduction de modèle par POD ENIM 2007
Page 43 sur 55
B - Application sur des mesures PIV Les mesures PIV réalisées dans cette partie ont été réalisées dans la thèse de Ben Cheikh
(2004). Elle traite l’écoulement derrière le culot d’une plaque plane. La zone d’essais est limitée en
envergure par des plaques de garde afin de s’approcher au maximum d’une configuration
bidimensionnelle. L’envergure résultante est de 100 mm. La plaque plane, de longueur L= 520 mm,
est placée sans incidence par rapport à l’écoulement. Elle se termine par un culot à angle droit de
hauteur h=12 mm.
Théoriquement, les propriétés de l’écoulement autour d’une plaque plane dépendent
essentiellement de deux paramètres qui sont le nombre de Mach incident, M, qui reste faible dans
notre cas (M< 0,1), et le nombre de Reynolds, ν
= ∞LUReL basé sur la longueur de
la plaque. Pour la valeur de la vitesse amont, =18 m/s, le nombre de Reynolds basé sur la
longueur L est de LRe =2 410 .
Les mesures de vitesses sont effectuées par vélocimétrie par images de particules (PIV) dans
le plan vertical de symétrie de l’installation, et seules les composantes de vitesse dans ce plan sont
étudiées. Le système d’acquisition et de traitement est un système commercial de marque Dantec
fonctionnant à une cadence de 4,5 Hz. La caméra utilisée possède un capteur CCD de 1280 * 1024
pixels. La dimension des fenêtres d’interrogation est de 0.870 mm x 0.871 mm. Les mesures sont
faites dans un domaine contenant le sillage, et les moyennes statistiques sont alors établies à l’aide
de 200 acquisitions réparties aléatoirement.
Les caractéristiques suivantes :
o Ecoulement derrière une plaque (non contrôlé)
o Le nombre de Reynolds =20000
o La période est égale 6.791 s
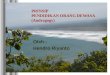
La Figure III-8 montre le champ de vitesse moyen. On peut facilement distinguer le sillage
moyen symétrique qui s’est formé au culot de la plaque. Il est dominé par deux structures
contrarotatives, le sillage s’étend de façon visible jusqu’à la distance x/h = 2 environ.
∞U

Réduction de modèle par POD ENIM 2007
Page 44 sur 55
Figure III-8 : Champ moyen de vitesse
1 - Analyse POD
La décomposition en modes propres orthogonaux (POD) basée sur la méthode des «
snapshots » permet de projeter chaque réalisation, dont on a soustrait la moyenne d’ensemble
( ) >< txU ,r
du champ de vitesse, sur une base modale suivant la relation :
200
1
( , ) ( ). ( )nnn
u x t a t xϕ=
=∑r r ur r
(III.2)
Dans la suite, les valeurs propres nλ associées aux modes )(xnφ sont rangées dans l'ordre
décroissant. nλ représente la contribution du mode )(xnφ à l’énergie totale de l’écoulement
fluctuant.
2 - Valeurs propres
Nous donnons dans le tableau suivant les valeurs propres associées aux premiers modes. On
remarque que chaque paire de modes successifs présente un poids énergétique de même ordre. Le
premier et le deuxième mode contiennent chacun plus de 36% de l’énergie totale. Le poids de ces
deux modes est supérieur à 75%. Ceci explique l’importance de ce mode dans la structure globale
de l’écoulement. Les deux modes suivants (3 et 4) contiennent moins d’énergie (18 fois plus faible),
mais la somme de leur énergie dépasse les 5%. La contribution énergétique individuelle des modes

Réduction de modèle par POD ENIM 2007
Page 45 sur 55
suivants est plus marginale. Cette analyse énergétique montre que les quatre premiers modes
fluctuants contiennent plus de 80 % de l’énergie du signal. Une troncature dans la décomposition à
l’ordre 4 sera étudiée dans la suite de ce travail.
Numéro du mode Poids énergétique (%) Somme cumulée (%)
1
2
3
4
39.19
36.66
2.40
2.02
39.2
75.6
78.0
80.3
Tableau III-2 : Valeurs propres fournies par le calcul POD
3 - Modes propres
Nous présentons, sur la Figure III-9, la Figure III-10, la Figure III-11 et la Figure III-12, les
quatre premiers modes spatiaux issus de l’analyse POD. Il apparaît très clairement que les modes
sont deux à deux complémentaires.
Les deux premiers modes (Figure III-9 et Figure III-10) possèdent une structure spatiale
axi-antisymétrique : les structures tourbillonnaires associées au mode 2 sont décalées spatialement
d’un quart de longueur d’onde sur l’axe de symétrie par rapport à celles du mode d’ordre 1. Une
certaine forme d’organisation de ces structures est visible. Ils représentent le mode de convection
des structures cohérentes qui se forment dans le sillage de la plaque plane. On observe l’alternance
de l’apparition sur l’axe médian de structures contrarotatives. C’est pourquoi les valeurs propres
correspondantes sont pratiquement du même ordre de grandeur. Ces résultats sont similaires à celle
cités dans Ben Chiekh et al. 2004

Réduction de modèle par POD ENIM 2007
Page 46 sur 55
Figure III-9 : Premier mode propre fluctuant issu de la décomposition POD :
représentation du champ de vitesse (en haut), et la carte de la norme (en bas).

Réduction de modèle par POD ENIM 2007
Page 47 sur 55
Figure III-10 : Deuxième mode propre fluctuant issu de la décomposition POD :
représentation du champ de vitesse (en haut), et la carte de la norme (en bas).
Les modes 3 et 4 (la Figure III-11 et la Figure III-12), quant à eux, sont axisymétriques.
Une forme d’évolution par convection d’un mode à un autre est visible : les modes 3 et 4 doivent
donc aussi être associés.

Réduction de modèle par POD ENIM 2007
Page 48 sur 55
Figure III-11 : Troisième mode propre fluctuant issu de la décomposition POD :
représentation du champ de vitesse (en haut), et la carte de la norme (en bas).

Réduction de modèle par POD ENIM 2007
Page 49 sur 55
Figure III-12 : Quatrième mode propre fluctuant issu de la décomposition POD :
représentation du champ de vitesse (en haut), et la carte de la norme (en bas).

Réduction de modèle par POD ENIM 2007
Page 50 sur 55
4 - Coefficients
Les deux premiers coefficients (Figure III-13) possèdent presque les mêmes
caractéristiques :
• La projection de Galerkin suit la même allure sauf que au ne légère différence se
manifeste au niveau des pics.
• La calibration raffine les résultats
0 10 20 30 40 50 60 70-15
-10
-5
0
5
10
15
POD
GalerkinGalerkin + Calibration
0 10 20 30 40 50 60 70-15
-10
-5
0
5
10
15
POD
Galerkin
Galerkin + Calibration
Figure III-13 Représentation des coefficients a1 et a2 issus de la décomposition POD (Valeurs discrète), de la
projection de Galerkin et de la calibration des cœfficients de la projection de Galerkin

Réduction de modèle par POD ENIM 2007
Page 51 sur 55
Les coefficients a3 et a4 (Figure III-7), quant à eux, ne le sont plus. Un déphasage
remarquable s’ajoute et s’amplifie de plus en plus au cours du temps.
0 10 20 30 40 50 60 70-6
-4
-2
0
2
4
6
POD
Galerkin
Galerkin + Calibration
0 10 20 30 40 50 60 70-5
-4
-3
-2
-1
0
1
2
3
4
5
POD
Galerkin
Galerkin + Calibration
Figure III-14 Représentation des coefficients a3 et a4 issus de la décomposition POD (Valeurs discrète), de la
projection de Galerkin et de la calibration des cœfficients de la projection de Galerkin

Réduction de modèle par POD ENIM 2007
Page 52 sur 55
Chapitre IV - : Conclusion et Perspectives

Réduction de modèle par POD ENIM 2007
Page 53 sur 55
L’idée de base de ce travail de mettre en pratique un programme qui permet de faire
décomposition aux valeurs propres, de faire la réduction de modèle (POD ROM) et de l’améliorer.
La réduction de modèle est basée sur la projection de Galerkin et la résolution des équations
de Navier Stokes.
Il ressort de cette étude :
- La décomposition POD est un outil qui permet d’avoir une représentation dynamique
d’un champ énorme de vitesse dans quelques modes;
- La projection de Galerkin permet de transformer représentation dynamique à valeurs
discrète en une représentation dynamique continue qui pourra être utilisé pour la
prédiction
- La calibration de la projection de Galerkin par la méthode d’ajout d’un terme linéaire
permet de calibrer les résultats de projection en assurant la conservation de l’énergie
du signal. D’autres techniques de calibration plus complexes sont envisageables.

Réduction de modèle par POD ENIM 2007
Page 54 sur 55
Bibliographies
1. AFANASIEV K.ET HINZE M. , 2001 : Adaptive control of a wake flow using Proper Orthogonal
Decomposition. In Shape Optimization and Optimal Design, Lecture Notes in Pure and Applied Mathematics,
volume 216. Marcel Dekker.
2. ALGAZI V.R. ET SAKRISON D.J. , 1969 : On the optimality of the Karhunen-Loève expansion. IEEE Trans.
Inform. Theory, 15.
3. ANDREWS C.A., DAVIES J.M. ET SCHWARTZ G.R. , 1967 : Adaptative data compression. Proc. IEEE, 55.
4. AUBRY N., HOLMES P., LUMLEY J.L. ET STONE E. , 1988 : The dynamics of coherent structures in the wall
region of a turbulent boundary layer. J. Fluid Mech., 192:115–173
5. BEN CHEIKH , M., 2004, Contrôle d’écoulement par jet synthétique analyse à partir des mesures de
vélocimétrie par image de particule, Thèse Ecole National d’Ingénieur de Monastir.
6. BEN CHIEKH M., M ICHARD M., GROSJEAN N., ET BERA J.C 2004 : « Reconstruction temporelle d’un champ
aérodynamique instationnaire à partir de mesures PIV non résolues dans le temps » , 9ème Congrès Francophone
de vélocimétrie Laser.
7. ”, Thèse de doctorat de l’Université de Poitiers.
8. BERGMANN M. , 2004 : Optimisation aérodynamique par réduction de modèle POD et contrôle optimal.
Application au sillage laminaire d’un cylindre circulaire. (Document annexe). Thèse de doctorat, Institut
National Polytechnique de Lorraine, Nancy, France.
9. BRAUD C. , 2003 : “Étude de la dynamique d’un écoulement à cisaillements croisées : Interaction couche de
mélange Sillage ”, Thèse de doctorat de l’Université de Poitiers
10. CAZEMIER W. , 1997 : Proper Orthogonal Decomposition and low-dimensionnal models for turbulent flows.
Thèse de doctorat, université de Groningen.
11. CAZEMIER W., VERSTAPPEN R.W.C.P. ET VELDMAN A.E.P. , 1998 : Proper Orthogonal Decomposition and
lowdimensional models for driven cavity flows. Phys. Fluids, 10(7):1685–1699.
12. CHRISTENSEN E.A., BRONS M. ET SORENSEN J.N. , 1998 : Approximation of large-scale dynamical systems:
an overview. Evaluation of POD-based decomposition techniques applied to parameter-dependent non
turbulent flows. Rapport technique, université Technique du Danemark.
13. CORDIER L. ET BERGMANN M. , 2002A : Proper Orthogonal Decomposition: an overview. In Lecture series
2002-04 on post-processing of experimental and numerical data. Von Kármán Institute for Fluid Dynamics.
14. CORDIER L. ET BERGMANN M. , 2002B : Two typical applications of POD: coherent structures eduction and
reduced order modelling. In Lecture series 2002-04 on post-processing of experimental and numerical data.
Von Kármán Institute for Fluid Dynamics.
15. DEANE A.E., KEVREKIDIS I.G., KARNIADAKIS G.E. ET ORSZAG S.A. , 1991 : Low-dimensional models for
complex geometry flows: Application to grooved channels and circular cylinders. Phys. Fluids, 10(3):2337–
2354.

Réduction de modèle par POD ENIM 2007
Page 55 sur 55
16. FAHL M. , 2000 : Trust-Region methods for flow control based on Reduced Order Modeling. Thèse de
doctorat, université de Trier.
17. GAD-EL-HAK M. , 2002 : The MEMS Handbook. CRC Press, Boca Raton, Florida.
18. GRAHAM W.R., PERAIRE J. ET TANG K.T. , 1999A : Optimal Control of Vortex Shedding Using Low Order
Models. Part 1. Open-Loop Model Development. Int. J. for Numer. Meth. in Engrg., 44(7):945–972.
19. GRAHAM W.R., PERAIRE J. ET TANG K.T. , 1999B : Optimal Control of Vortex Shedding Using Low Order
Models. Part 2: Model-based control. Int. J. for Numer. Meth. in Engrg., 44(7):973–990.
20. GUNZBURGER M.D. , 1995 : Flow control. Springer, New York.
21. HOTELLING H. , 1933 : Analysis of a complex statistical variables into principal components. Journal of
Educational Psychology, 24:417–441.
22. KARHUNEN K. , 1946 : Zur spektral theorie stochasticher prozesse. Ann. Acad. Sci. Fennicae, Ser. A1, 34.
23. K IRBY M. ET SIROVICH L. , 1990 : Application of the Karhunen-Loève procedure for the characterization of
human faces. IEEE Transactions on Pattern Analysis and Machine Intelligence, 12(1):103–108.
24. LUMLEY J.L. , 1967 : Atmospheric Turbulence and Wave Propagation. The structure of inhomogeneous
turbulence, pages 166–178. A.M. Yaglom & V.I. Tatarski.
25. PAYNE F., LUMLEY J. , 1967 : “Large eddy structure of the turbulent wake behind a circular cylinder”, Phys.
Fluid. 194
26. PRANDTL L. , 1925 : The magnus effect and windpowered ships. Naturwissenschaften, 13:93.
27. RAVINDRAN S.S. , 1999: Proper Orthogonal Decomposition in optimal control of fluids. Rapport technique,
NASA, Langley Research Center, Hampton, Virginia.
28. RAVINDRAN S.S. , 2000A : Reduced-order adaptive controllers for fluid flows using POD. J. of Scientific
Computing, 15(4):457–478.
29. RAVINDRAN S.S. , 2000B : A reduced-order approach for optimal control of fluids using Proper Orthogonal
Decomposition. Int. J. Numer. Meth. Fluids, 34:425–448.
30. REMPFER D. , 1996 : Investigations of boundary layer transition via Galerkin Projections on Empirical
Eigenfunctions. Phys. Fluids, 8(1):175–188.
31. REMPFER D. ET FASEL H.F. , 1994 : Evolution of three-dimensional coherent structures in a flat-plate
boundary layer. J. Fluid Mech., 260:351–375.
32. RIESZ F. ET NAGY B.S. , 1955 : Functionnal Analysis. Ungar, N.Y..
33. SIROVICH L. , 1987A : Turbulence and the dynamics of coherent structures. Part 1: Coherent structures.
Quarterly of Applied Mathematics, XLV(3):561–571.
34. SIROVICH L. , 1987B : Turbulence and the dynamics of coherent structures. Part 2: Symmetries and
transformations. Quarterly of Applied Mathematics, XLV(3):573–582.
35. SIROVICH L. , 1987C : Turbulence and the dynamics of coherent structures. Part 3: Dynamics and scaling.
Quarterly of Applied Mathematics, XLV(3):583–590.
36. SORNBORGER A., SAILSTAD C., KAPLAN E. ET SIROVICH L. , 2003 : Spatiotemporal analysis of optical
imaging data. NeuroImage, 18:610–621.
37. UKEILEY L., CORDIER L., MANCEAU R., DELVILLE J., GLAUSER M. ET BONNET J.-P. , 2001 : Examination
of largescale structures in a turbulent mixing layer. Part 2. Dynamical systems model. J. Fluid Mech., 441:67–
108.