Embed Size (px)
Citation preview
1
Sistemas de
Telecomunicações 2 (2004/2005)
Cap. 2 – Radares
2
Radares
1. Introdução aos Radares– História– Aplicações
2. Conceitos gerais 3. Radar Doppler de onda contínua e FM4. Radar Doppler de impulso e MTI

2
3
1- INTRODUÇÃO
• Radar – RAdio Detection And Ranging – meio de recolher informações sobre objectos distantes
(ou alvos), enviando ondas electromagnéticas sobre o alvo e analisando os ecos recebidos.
– O primeiro grande desenvolvimento desta tecnologia foi nos anos anteriores à 2ª guerra mundial, com o intuito de detectar a aproximação da aviação inimiga mesmo quando os aviões não eram visíveis devido ao mau tempo.
– Animais com “radares” naturais: morcego, golfinho (sonar)
4

3
5
História• 1886: Hertz
» mostrou que ondas rádio podem ser reflectidas por metais e dieléctricos
• 1903: Hülsmeyer» detectou ondas reflectidas nos navios e patenteou um
dispositivo detector de obstáculos útil para navegação marítima
• 1922: Marconi» reconheceu as potencialidades das ondas curtas para
detecção de obstáculos permitindo revelar a presença de um navio mesmo com nevoeiro denso
• 1922: A.H. Taylor e L.C. Young (Naval Research Laboratory)» detectaram barco de madeira usando radar de onda
contínua (com emissor separado do receptor)• 1925: Breit e Tuve
» usam radar de impulso para medir a altura da ionosfera
6
História (2)• 1930: L.A. Hyland (Naval Research Laboratory)
» primeira detecção de aviões• 1932: L.A. Hyland (Naval Research Laboratory)
» equipamento detector de aviões até 50 milhas do emissor
• 1934: Naval Research Laboratory» primeiros testes com radar impulso devido às
limitações do radar de onda contínua • 1936: Naval Research Laboratory
» primeiros resultados com radar de impulsos• Segunda guerra mundial
» grande evolução do radar (aumento da frequência e novos amplificadores com mais potência)

4
7
Aplicações– Controlo de tráfego aéreo
• monitorização tráfego + sistemas de aterragem– Navegação aérea
• evitar regiões turbulência e mau tempo• evitar elevações de terreno• altímetro
– Segurança navios• impede colisões com outros navios• detecta bóias de navegação
– Espaço• Aterragem• docking• estações terrestres – detecção de satélites
8
Aplicações (2)– Remote sensing
• Radar Astronomia Satélites meteorológicos• mapeamento camadas de gelo marítimo
– Cumprimento da Lei (Polícia) • medir a velocidade de um veículo automóvel• detecção de intrusos
– Aplicações militares• vigilância• navegação• controlo e orientação de armas (mísseis)
– Outros• Medidas de velocidade e distância• Explorações de gás e de petróleo• Estudos de movimentos de insectos e aves
5
9
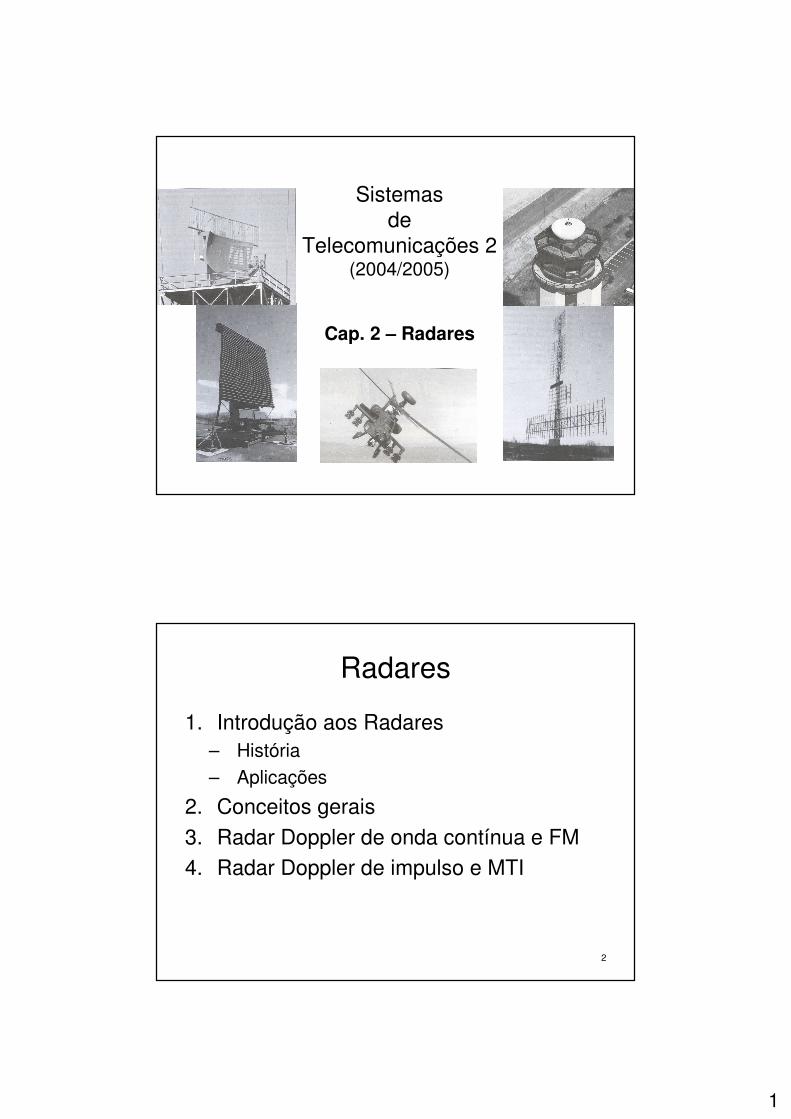
Mapa de frequências radar
Espectro electromagnético e frequências do radar
Bandas do radar
10
PPI e A-scope
(a) PPI – Alcance vs ângulo (b) A-scope – amplitude vs alcance
6
11
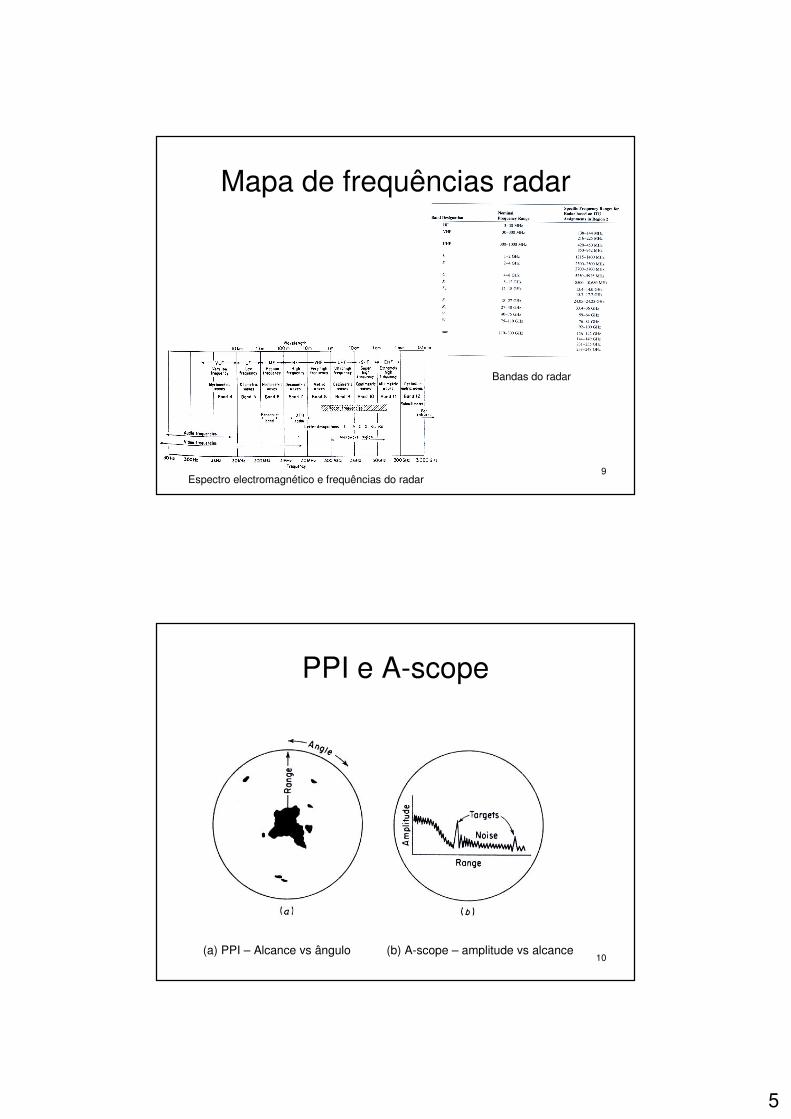
A-scope
Varrimentos sucessivos dum radar MTI num ecrã A-scope(amplitude do eco em função do tempo)
Em (f) vemos a sobreposição de muitos varrimentos; as setas indicam a posição de alvos em movimento
12
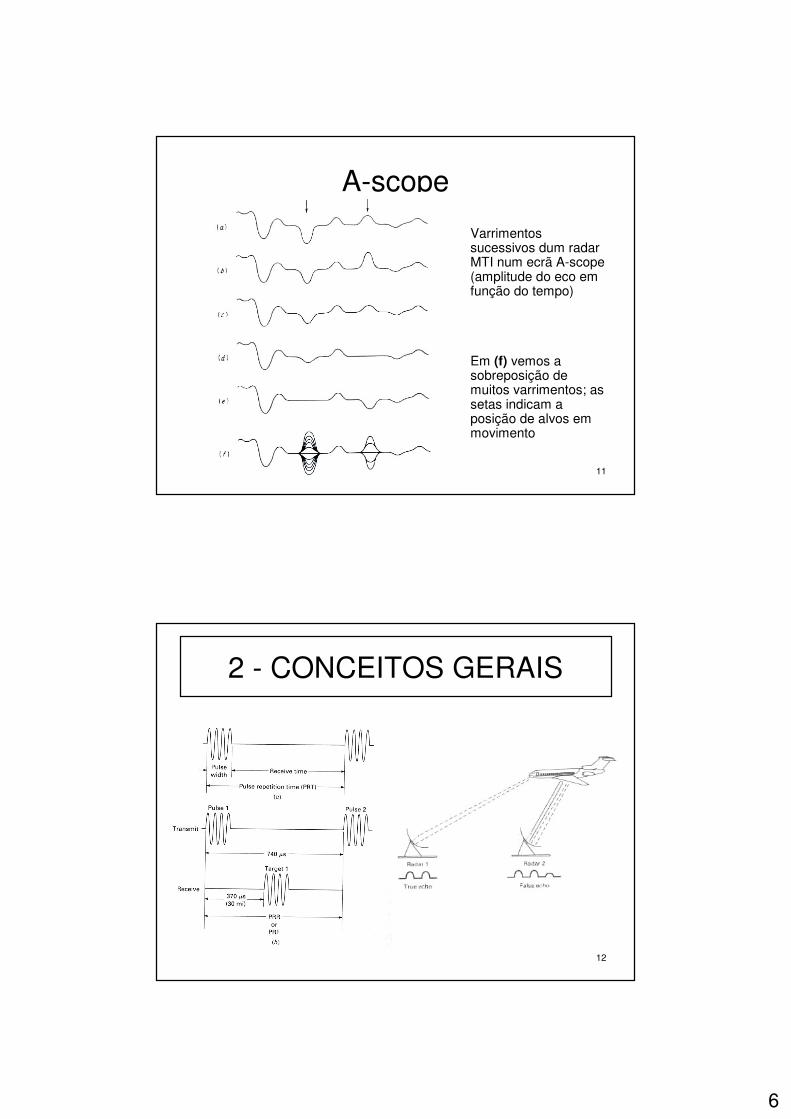
2 - CONCEITOS GERAIS

7
13
Densidade de potência
• Antena isotrópica
• Antena directiva (ganho G)
• O alvo intercepta parte da potência incidente e reflecte em várias direcções
( ) (1.2) �
�
� �������
�
( ) (1.1)�������������
�
� �������
�
( ) (1.3) �
��
� �����������
� σ×
Densidade de Potência que chega de volta ao radar após ser reflectida no alvo
14
Alcance do radar
• Potência recebida pela antena do radar
• Alcance máximo do radar ( ) (1.5)
41
�� ��
����
���
�
����� �
�
���
�=
( ) (1.4) ������
�
����
�� ���
�� ×=
Forma fundamental da equação do alcance do radar

8
15
Área efectiva duma antena (Ae)
16
Alcance do radar (2)
• A mesma antena é usada para emissão e recepção ( ) (1.6)
41
��
���
�=
���
�
��
����
��
����
(1.7) 41
��
���
�=
���
�
�
�����
����
����
�
�
�
��� = OU

9
17
Equação do Radar
( )41
��
���
�=
���
�
�����
��
����
– O projectista do radar só não controla o parâmetro σ– Para termos um grande alcance, necessitamos de:
• Transmitir com potência elevada, com a energia concentrada num feixe estreito (ganho de emissão elevado)
• Usar uma antena receptora de ganho elevado capaz de captar a energia do eco
• Usar um receptor sensível a sinais fracos
18
– Na prática, a equação anterior é insuficiente para prever o desempenho de um radar real.
– Por vezes o alcance real do radar pode corresponder a apenas metade do previsto.
– Isto deve-se a:• Natureza estatística do sinal mínimo detectável
(geralmente determinado pelo ruído do receptor)• Flutuações e incertezas na secção do alvo• Perdas existentes num sistema de radar• Efeitos de propagação na superfície terrestre na
atmosfera• Outros efeitos estatísticos:
– Condições meteorológicas– Erro do operador humano

10
19
Mínimo sinal detectável
• A capacidade de um radar detectar um sinal de eco fraco é limitada pelo ruído existente na mesma banda do sinal.
• O sinal mais fraco que um radar consegue detectar é chamado de sinal mínimo detectável (Smin). – Não é fácil de especificar devido à sua
natureza estatística e porque o critério para decidir se existe ou não um alvo pode não estar bem definido.
20
Detecção por limiar
• A detecção baseia-se no estabelecimento de um limiar mínimo à saída do receptor.
• Se o nível de sinal ultrapassar o limiar, diz-se que existe eco.
Envolvente da tensão de saída do receptor em função do tempo

11
21
• Como definir o limiar?
• Um erro pode ser causado por:
1. Não reconhecer um alvo que está presente– Falha
(caso C na figura anterior)
2. Reconhecer um alvo que não existe– Falso Alarme
(se um pico de ruído ultrapassar o limiar)
22
Diagrama de blocos Radar
Diagrama de blocos dum radar de impulsos (versão ultra-simplificada)
Diagrama de blocos dum radar de impulsos

12
23
Ruído do receptor– O ruído do receptor é o principal factor limitativo
da sensibilidade do receptor• Ruído térmico = K T B• A figura de ruído (F) é igual ao quociente entre o ruído
à saída dum receptor real e o ruído térmico dum receptor ideal à temperatura T0
(Ga – ganho disponível)
Como KT0B = Nin num receptor ideal F pode ser escrito:
���������
� �
���
����
=
��
���
�
� =
����������
�
������
����
=
24
• Podemos interpretar a figura de ruído como uma medida da degradação da relação sinal-ruído à medida que o sinal passa no receptor
• Se o valor mínimo de sinal detectável (Smin) for o valor de Sin correspondente à mínima relação sinal-ruído detectável à saída do amplificador IF então:
• Substituindo na eq. (1.5) vem:
���������
����������
� �
� ���� =
�������� � �������
���
���
��� =
( ) ( ) ����������������������
����
���� �� ��
�
�����
41
���
�
���
�=

13
25
Probabilidade de falso alarme– Queremos especificar uma relação sinal-ruído à
saída do amplificador IF de modo a obtermos uma determinada probabilidade de detecção de alvo sem exceder uma determinada probabilidade de falso alarme
Parte do receptor de radar: o sinal de eco é detectado e a decisão de detecção é feita
26
– O ruído que entra no amplificador IF é gaussiano e pode ser descrito por:
onde ψ0 é a variância da tensão do ruído e p(v)dv é a probabilidade de encontrar a tensão de ruído v entre v e v+dv (valor médio v assume-se zero)
– A probabilidade de falso alarme é:VT – limiar de tensãoPfa – probabilidade de ruído
ultrapassar o limiar
�������!���
" � �
�
!�
�
��
�
�
�−
=�
���
������� �
�
!�
#�
��
�
�
�−
=��
�
14
27
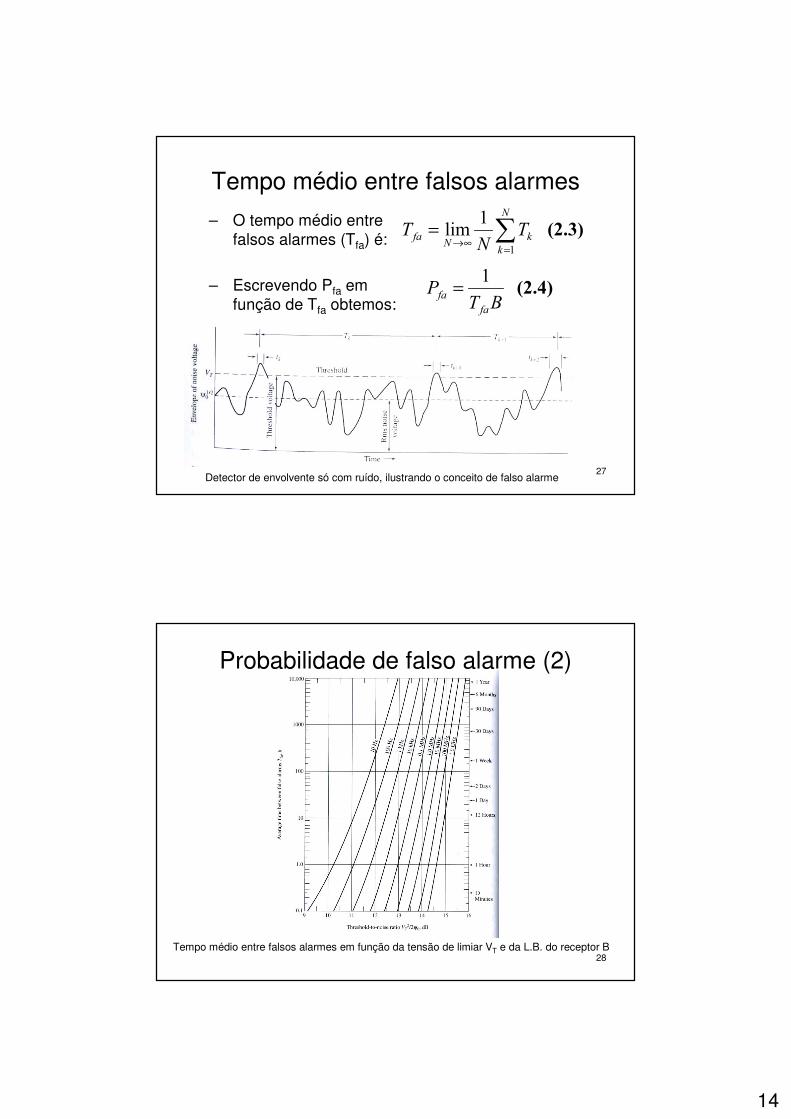
Tempo médio entre falsos alarmes– O tempo médio entre
falsos alarmes (Tfa) é:
– Escrevendo Pfa em função de Tfa obtemos:
�������"
$��
"
=∞→
=
�
�
�� �
�
�������"
���
��
�� =
Detector de envolvente só com ruído, ilustrando o conceito de falso alarme
28
Probabilidade de falso alarme (2)
Tempo médio entre falsos alarmes em função da tensão de limiar VT e da L.B. do receptor B

15
29
Processo de detecção por limiar
Função densidade de probabilidade para ruído e para ruído+sinal
30
Probabilidade de detecção
Probabilidade de detecção de uma onda sinusoidal em função da relação S/N e de Pfa

16
31
Integração– A análise feita até agora
sobre a probabilidade de falso alarme e a probabilidade de detecção aplica-se a apenas um impulso de radar e a um eco recebido desse mesmo impulso.
– Normalmente vários ecos são recebidos de um alvo e podem ser usados para melhorar a detecção
– Ao processo de juntar vários ecos para melhorar a detecção chama-se INTEGRAÇÃO
�
%�
&
%�
��'(
#)
)
#)� ==
�
nB – nºimpulsos recebidos do alvoθB – largura do feixe (graus)fp – freq. Repetição impulsos (Hz)θS – taxa de exploração da antena
(graus/seg)Wm – taxa de exploração da antena (rpm)Valores típicos:nB: 15 ecos, θB: 1,5 º, fp: 300 Hz, θS: 30º/s, Wm: 5 rpm
32
pré-detecção vs. pós-detecção
– Se a integração dos vários ecos for feita antes do segundo detector, i.e., no IF, é chamada pré-detecção ou integração coerente
– Caso a integração seja feita após o segundo detector, i.e., no video, é chamada pós-detecção ou integração não coerente
17
33
pré-detecção vs. pós-detecção (2)
– A pré-detecção usa a fase do sinal de eco. – O segundo detector destrói a informação de fase,
pelo que a pós-detecção não a usa.– n impulsos � pré-detecção:
• (S/N)n = (S/N)1 / n.
– n impulsos � pós-detecção :• (S/N)n > (S/N)1 / n.
– Em resumo:• Pré-detecção é mais eficiente• Pós-detecção mais fácil de implementar (mais usada)
34
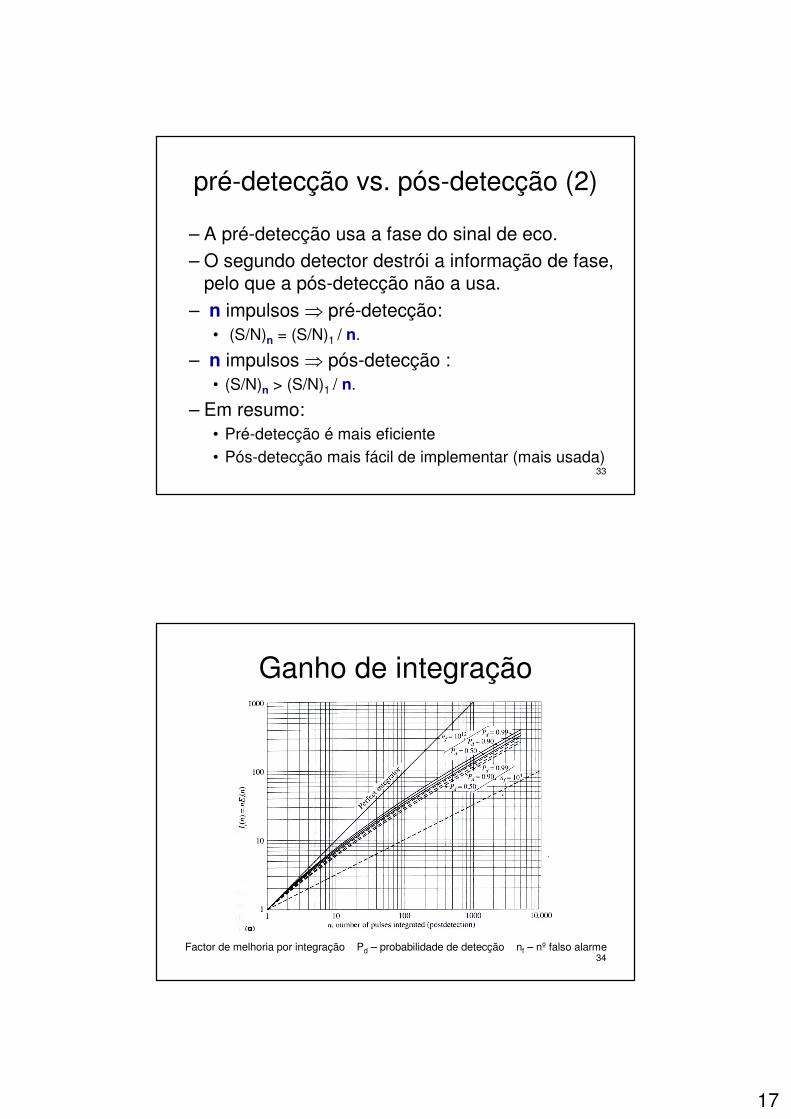
Ganho de integração
Factor de melhoria por integração Pd – probabilidade de detecção nf – nº falso alarme

18
35
Perdas de integração
Perdas de integração em função do nº impulsos, Pd e nf
36
De regresso à equação do alcance do radar:
Podemos agora escrevê-la:
Onde (S/N)n corresponde à relação sinal-ruído de cada um dos n impulsos integrados
Substituindo (S/N)n por (S/N)1/n Ei(n) vem:
( ) ( ) ����������������������
����
���� �� ��
�
��
���
41
���
�
���
�=
( ) ( ) �� �����������������
����
�
�
��
���
41
��
���
�=
�
( ) ( ) ��������������������
�� *�������
"�
�
������
41
��
���
�=
Ver gráfico acetato 32
Ver gráfico acetato 28
19
37
Secção do alvo vista pelo radar
– A secção dum alvo tem grandes variações devido a inúmeros factores:
• Varia com a incidência (ângulo)• Varia com a polarização• Varia com a frequência
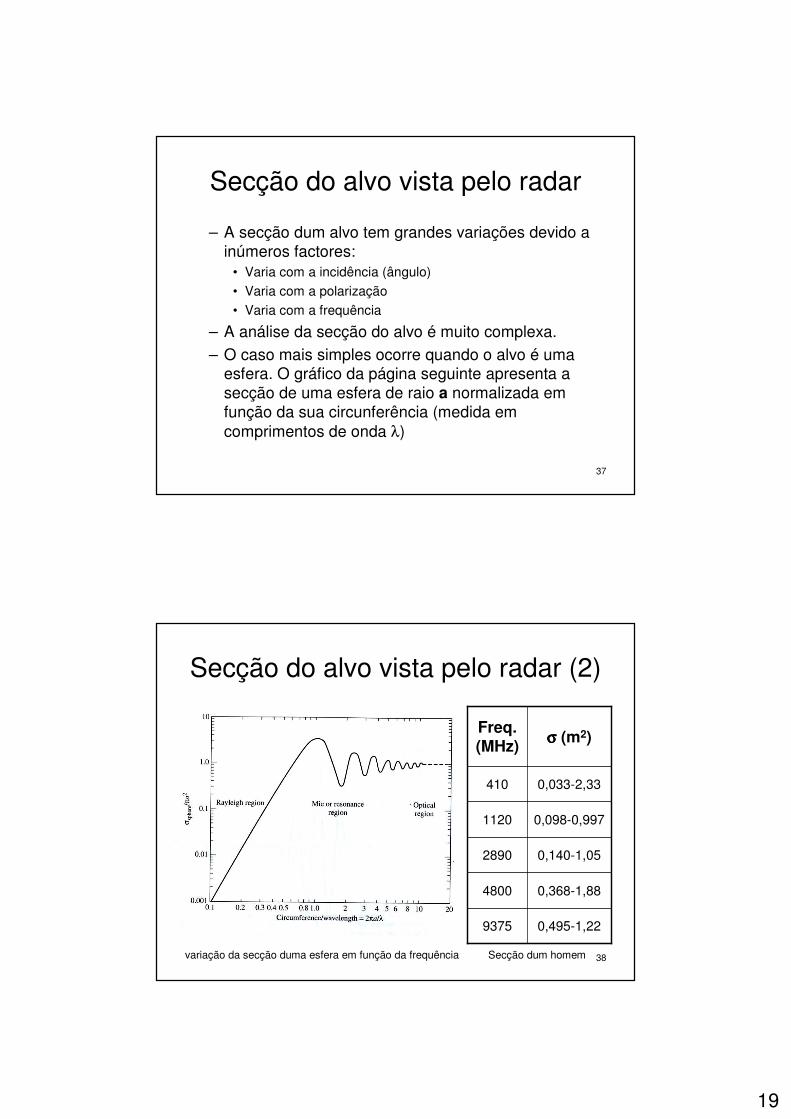
– A análise da secção do alvo é muito complexa. – O caso mais simples ocorre quando o alvo é uma
esfera. O gráfico da página seguinte apresenta a secção de uma esfera de raio a normalizada em função da sua circunferência (medida em comprimentos de onda λ)
38
Secção do alvo vista pelo radar (2)
0,495-1,229375
0,368-1,884800
0,140-1,052890
0,098-0,9971120
0,033-2,33410
σσσσ (m2)Freq. (MHz)
variação da secção duma esfera em função da frequência Secção dum homem

20
39
Secção do alvo vista pelo radar (3)
O radar tem que ser especificado para um determinado tipo de alvo, pois como se pode ver na tabela seguinte, a secção dum alvo varia bastante de alvo para alvo
Exemplos de secções de alvos diferentes a frequências micro-ondas
40
Flutuações da secção do alvoO sinal de eco varia com o tempo.Se o alvo estiver em movimento a secção do alvo varia relativamente ao radar e provoca variações no sinal do eco.Uma forma de ter em conta uma área de alvo flutuante quando resolvemos a equação fundamental é seleccionar um limiar inferior, i.e., um determinado valor para a secção que sabemos que vai ser excedido a maior parte do tempo (95% ou 99% do tempo).Para efeitos práticos o valor escolhido é mínimo e o alvo vai apresentar sempre uma área maior do que a escolhida.

21
41
Perdas do sistema– Existem vários factores para além dos especificados
na equação do radar que introduzem perdas• Perdas de acoplamento
– Linha transmissão (1dB)– Ligações fracas (0,5dB)– Perdas no duplexer (1,5dB)
• Perdas da antena – O ganho que se usa na equação assumiu-se constante mas
isto não é sempre válido.• Perdas processamento de sinal• Perdas colapso• Perdas operador• Outras perdas
– Perdas propagação– Degradação do equipamento
42
Perdas do sistema (2)
• Entrando em conta com o factor de perdas do sistema (Ls) na equação do alcance do radar obtemos:
( ) ( ) �������+��������������
�� *�������
&"�
�
������
41
��
���
�=