Embed Size (px)
Citation preview

Univerzitet u Nisu
Prirodno-matematicki fakultet
Departman za matematiku
Radonova transformacija injene primene u tomografiji
MASTER RAD
Mentor: Student:Prof. dr Nebojsa Dincic Svetlana Stankovic
Nis, 2019.

Sadrzaj
1 Uvod 2
2 Kompjuterizovana tomografija 32.1 O X-zracima . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Otkrice i princip rada kompjuterizovane tomografije . . . . . . 52.3 Istorija CT uredaja . . . . . . . . . . . . . . . . . . . . . . . . 62.4 Razvoj CT uredaja . . . . . . . . . . . . . . . . . . . . . . . . 9
3 Furijeova transformacija 123.1 Furijeova transformacija funkcija u L1(R) . . . . . . . . . . . 123.2 Furijeova transformacija funkcija u L1(Rn) . . . . . . . . . . . 133.3 Furijeova transformacija funkcija u L2(R) . . . . . . . . . . . 153.4 Furijeova transformacija funkcija u L2(Rn) . . . . . . . . . . . 163.5 Konvolucija . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4 Radonova transformacija 204.1 Prostor pravih u ravni . . . . . . . . . . . . . . . . . . . . . . 204.2 Radonova transformacija . . . . . . . . . . . . . . . . . . . . . 234.3 Inverzna Radonova transformacija . . . . . . . . . . . . . . . . 33
4.3.1 Filtered Back-projection . . . . . . . . . . . . . . . . . 394.4 Hilbertova transformacija . . . . . . . . . . . . . . . . . . . . . 424.5 Aproksimativni inverzi Radonove transformacije . . . . . . . . 444.6 Radonova transformacija podataka sa ogranicenim nosacem . . 474.7 Neprekidnost Radonove transformacije i inverzne Radonove
transformacije . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.8 n-dimenzionalna Radonova transformacija . . . . . . . . . . . 52
1

Glava 1
Uvod
Tema izucavanja ovog master rada je Radonova transformacija i njenaprimena u tomografiji. Rad se sastoji od tri glave.
Na pocetku prve glave govorimo o X-zracima. Potom, paznju usmeravamona kompjuterizovanu tomografiju, njen razvoj i istoriju.
U drugoj glavi se nalaze osnovni pojmovi i rezultati vezani za Furijeovutransformaciju, koji se kasnije koriste.
U trecoj glavi uvodimo definiciju Radonove transformacije i navodimonjene osnovne osobine. Zatim, prikazujemo zanimljive primere i rezultatevezane za ovu transformaciju. Govorimo o primeni Radonove transformacijeu kompjuterizovanoj tomografiji, znacajnim rezultatima za rekonstruisanjeslike u medicini.
Neizmernu zahvalnost dugujem svom mentoru, prof. dr Nebojsi Dincicu,na ohrabrenju, strpljenju i strucnim savetima tokom izrade ovog master rada.
Veliku zahvalnost dugujem i svojoj porodici na bezuslovnoj ljubavi i podrsci,ne samo tokom studiranja, vec i tokom citavog skolovanja.
2
Glava 2
Kompjuterizovana tomografija
2.1 O X-zracima
Za prekretnicu u istrazivanju nemackog fizicara Vilhema Konrada Rend-gena (1845-1923) smatra se 1895. godina kada je vrsio eksperimente sa katod-nim zracima u Kruksovoj cevi (lampa iz koje je izvucen vazduh i u kojoj su narastojanju od nekoliko centimetara postavljene dve elektrode, katoda i anoda,prikljucene na izvor napona). Rendgen je zapazio fluorescentno svetlucanjeblizu aparature koje potice od ploce presvucene barijum-platina-cijanidom.Naslutio je da se radi o novom, nepoznatom zracenju, a ne o zracenju iz ka-todne cevi. Zbog svoje tada jos uvek neistrazene prirode, nazvao je zrake Xzracima, na osnovu matematicke oznake za nepoznatu vrednost, ali je nadaljeuporno istrazivao osobine istih. Sa tim ciljem uvio je lampu crnom hartijomi postavio u sobi fluorescentni materijal. Potom je izmedu uvijene lampe imaterijala redom stavljao knjige, razne predmete od metala, olovnu plocu.Primetio je da fluorescentni materijal svetli u svim slucajevima, osim kadaje izmedu lampe i materijala stavio olovnu plocu. Uz pomoc Hitorfove cevi(koja zraci katodne zrake) zakljucio je da ni ploce od zlata, zive, urana nepropustaju X-zrake. Veoma snazan osecaj u njemu ostavio je trenutak kadaje izmedu lampe i materijala stavio svoju ruku. Na materijalu su se prikazalekosti njegove sake, tamnije boje u odnosu na svetlu pozadinu. Zakljucio jeda su zraci prosli kroz sve meke delove njegove sake, a da ih cvrsto tkivokostiju ipak ne propusta. Postupak je ponovio koristeci saku svoje supruge,ali i saku slavnog svajcarskog anatoma Alberta fon Kelikera. Takode, u svom
3

eksperimentu, Rendgen je koristio i fotografsku plocu umesto fluorescentnogmaterijala. U radu ,,O novoj vrsti X-zraka”, Rendgen govori o svojstvimaovih zraka medu kojima su fotohemijsko dejstvo na fotografsku plocu, apsor-pcija, pravolinijsko prostiranje, kao i to da ne skrecu u prisustvu magnetnogili elektricnog polja. Za Rendgenovo otkrice, za koje je dobio najvece priz-nanje, Nobelovu nagradu za fiziku 1901. godine, ubrzo se culo po svetu. Naprestiznom Masacusetskom Institutu za tehnologiju (MIT), na departmanuza fiziku, naucnici su bili u mogucnosti ponovo stvoriti X-zrake. Na medicin-skom okupljanju u Bostonu 1896. godine bila je prikazana i slika celokupnogljudskog skeleta. Veliki znacaj X-zraka ogleda se i u koriscenju jednostavnihrendgen aparata za otkrivanje metaka u telu ratnika u Prvom svetskom ratu.
Javnosti je malo poznato da je X-zrake zapazio 1892. godine i NikolaTesla kao ,,vidljivu svetlost, crnu svetlost i neko narocito zracenje”.1 Iakodobijeni na razlicite nacine, Teslini zraci (zapazeni kod sijalice za molekulskobombardovanje) i Rendgenovi zraci, imali su veoma slicne osobine. Obojicasu bili duboko ganuti zapazanjima i postignucima drugog. Tesla je svojimtemeljnim radom postavio osnove radiologije i rendgenografije. Prvi uvodirendgensku foliju koja je ona nezaobilazna u rendgenografiji. Dele se na sit-nozrnaste i krupno zrnaste folije. Prvi uocava da kvalitet rendgenske slike za-visi od velicine zrna folije. Takode, prvi govori o negativnom uticaju X zrakana organizam coveka. Pazljivo je opisao promene na telu koje je uocavao:,,Prilikom izlaganja glave jakom zracenju zapazeni su neobicni efekti. Naprimer, nasao sam da se javlja sanjivost i izgleda kao da vreme brzo pro-lazi. Postoji opsti efekat smirenja, a ja sam imao osecaj toplote u gornjemdelu glave”.1 Dodaje: ,,...kada mi je nesto drugo odvuklo paznju, a nijeproslo ni 20 minuta kada sam zapazio da je ruka, koja je bila izlozena, veomapocrvenela i otekla”.1 Medutim, radio je i na pronalasku zastite od stetnogrendgenskog zracenja, pa je u tu svrhu uveo aluminijumske zavese kao prvezastitne paravane.
1,,Tesla o X-zracima”, Rade R. Babic
4
2.2 Otkrice i princip rada kompjuterizovane
tomografije
Nagli razvoj fizike, hemije, tehnike igra veoma bitnu ulogu u razvojudijagnosticke medicine. Dijagnosticke metode (rendgenska dijagnostika, bio-hemijske analize, geneticka dijagnostika...) su dobile na znacaju, pa danaspredstavljaju neizostavni deo procesa dijagnostike vecine bolesti. Svi po-daci, prikupljeni ispitivanjima pacijenta i pridruzeni osnovnoj dokumentaciji,danas su digitalni. Osnovni cilj je da se sacuva ljudski zivot.
Nekada se bolest utvrdivala samo na osnovu podataka, simptoma kojepacijent saopsti lekaru i znakova bolesti koje on sam uoci na pacijentu.Dolazilo je do nejasnoca u postavljanju dijagnoze, kasnjenja u njenom posta-vljanju, pa cak i do netacne dijagnoze. Zahvaljujuci danasnjim instrumen-tima, koji postaju sve brojniji, procedura postavljanja dijagnoze je znatnoolaksana. Cilj moderne tehnologije je pre svega spreciti nastanak bolesti ilije otkriti u ranoj fazi kada su moguce intervencije koje ce zaustaviti daljirazvoj bolesti.
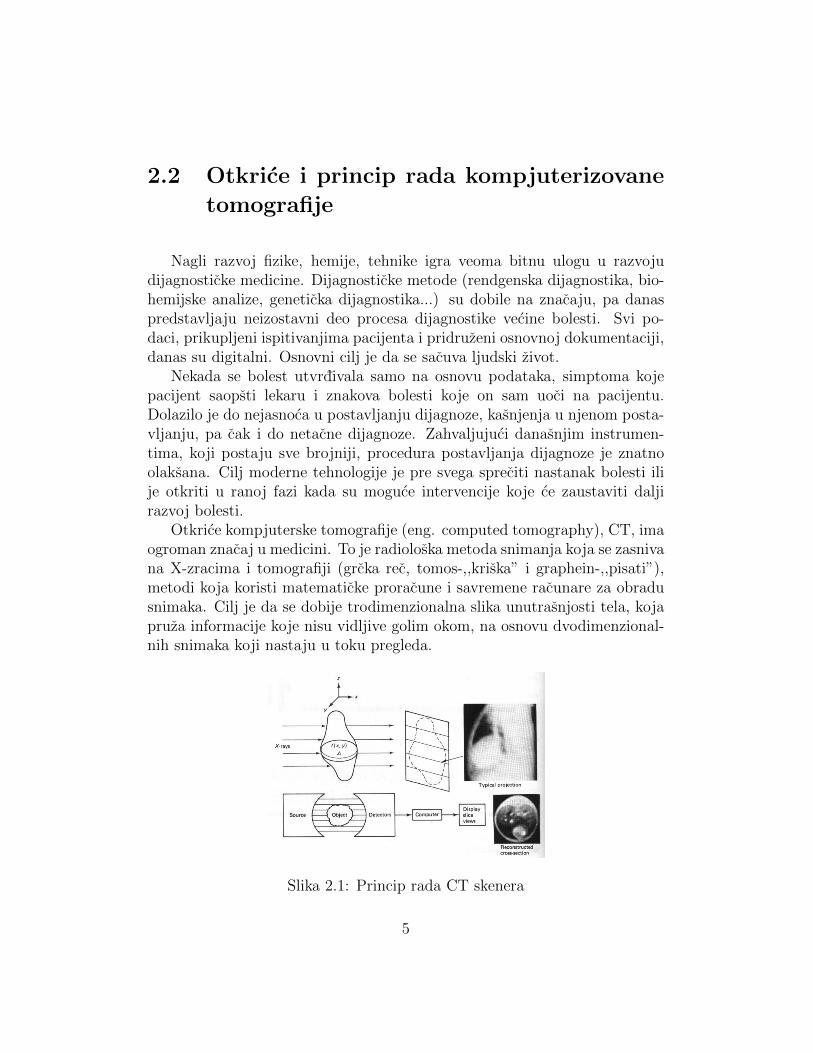
Otkrice kompjuterske tomografije (eng. computed tomography), CT, imaogroman znacaj u medicini. To je radioloska metoda snimanja koja se zasnivana X-zracima i tomografiji (grcka rec, tomos-,,kriska” i graphein-,,pisati”),metodi koja koristi matematicke proracune i savremene racunare za obradusnimaka. Cilj je da se dobije trodimenzionalna slika unutrasnjosti tela, kojapruza informacije koje nisu vidljive golim okom, na osnovu dvodimenzional-nih snimaka koji nastaju u toku pregleda.
Slika 2.1: Princip rada CT skenera
5

CT skener ima oblik velike kutije sa kruznim otvorom ili kracim tunelomu centru u kome se nalazi ispitni sto. Pacijent lezi na ispitnom stolu koji pro-lazi kroz skener i izlaze se rendgenskom zracenju. Izvor rendgenskog zracenjasalje X-zrake koji prolaze kroz telo pacijenta i putuju ka detektorima, kojisu poredani u obliku kruznog prstena poznatijeg kao ,,detektorska banana”.Rendgenski zraci i detektori putuju oko tela pacijenta u kordinaciji sa stolomna kome je pacijent. X-zraci mogu biti apsorbovani ili oslabljeni pri prolaskukroz telo pacijenta u zavisnosti od gustine telesnih tkiva. Kompjuter dobijaveliki broj podataka od detektora, pa obavljajuci matematicke proracunestvara dvodimenzionalnu sliku poprecnog preseka tela koja se prikazuje namonitoru racunara. Slika nam pruza veliki broj saznanja o zdravstvenomstanju pacijenta, jer detektori imaju mogucnost da razlikuju i najmanju ra-zliku u intenzitetu rendgenskog zracenja pri prolasku kroz telo pacijenta.Postoji mogucnost da se organ koji se snima ne razlikuje dobro od okolnihstruktura. U tom slucaju, da bi se poboljsao vizuelni prikaz organa, pacijentuse daje kontrasno sredstvo intravenski, oralnim ili rektalnim putem, zavisnood organa. Ono oslabljuje zracenje zbog svog visokog atomskog broja (jodili barijum). Lekar radiolog utvrduje da li je potrebna primena kontrasnogsredstva. U slucaju umerenih nezeljenih reakcija na kontrasno sredstvo, kaosto su mucnina, povracanje, osecaj toplote, bitno je da postoje oprema ilekovi za ukazivanje prve pomoci.
2.3 Istorija CT uredaja
U Japanu, 1946. godine, konstruisan je rendgenski aparat za rotacionutomografiju, koji je nazvan ”rotografija”. Princip rotografije se sastojao usledecem: pacijent je lezao na stolu, dok su rendgenska cev i rendgenskifilm u kaseti, koji su bili postavljeni sa razlicite strane bolesnika, paralelnorotirali oko njega praveci polukrug ili puni krug (od 0◦ za 230◦ ili 360◦) zavreme ekspozicije. Nedostatak odgovarajucih racunara (kompjutera) u tovreme prouzrokovao je obradivanje slika na uobicajen, klasican nacin. Neg-ativne strane ovog pristupa obradi slika su ogromno ulaganje napora, kao iupitna verodostojnost rezultata. Princip rotografije je postao idejni osnovnakon pojave racunara za kompjuterizovanu tomografiju (CT). Oldendorf2
2William H. Oldendorf, 1925-1992, americki neurolog, fizicar i osnivac tehnike CT
6

je 1961. godine, na osnovu eksperimenata koje je vrsio, ukazao na mogucnostmerenja apsorpcije u poprecnom preseku tela pomocu uskog snopa X-zraka.Medutim, problem je predstavljalo manuelno izracunavanje. Tek nakon po-jave kompjutera, na ovim principima, a nakon cetvorogodisnjeg istrazivanja,engleski fizicar Godfri Haunsfild (Godfrey Newbold Hounsfield), u sarad-nji sa americkim matematicarom Alenom Kormarkom (Allen Cormack) i uzsugestije neuroradiologa Embrouza (J. Ambrose), konstruisao je 1971. go-dine prvi aparat za kompjuterizovanu tomografiju, koji je proizveden u firmiEMI (Electronic Music Industries) u Londonu. Prototip prvog CT uredajaje montiran u bolnici ”Morley Hospital” u Atkinsonu 1971. godine. Ko-ristio se samo za snimanje glave. Prvi CT skeneri uvedeni su u klinickupraksu 1972. godine. Haunsfildov projekat je finansiran od strane Elek-tronske muzicke industrije (EMI) u koju je Godfri radio tokom sesdesetih isedamdesetih godina 20. veka. EMI je bila u mogucnosti da nacini ovaj ko-rak, jer je zaradivala zavidne svote novca zahvaljujuci uspesnim muzicarimai njihovim plocama. Haunsfildov doprinos razvoju kompjuterizovane tomo-grafije ogleda se i u upotrebi Haunsfildove skale koje se koristi za merenjeatenuacije 3 rendgenskih zraka na CT snimcima. Velicina Haunsfildove je-dinice se odreduje na sledeci nacin: vodi je dodeljena vrednost od 0 Hausfil-dovih jedinica, skraceno 0 HU (0 Housfiled unit), vazduhu -1000 HU, a gustojkortikalnoj kosti +1000 HU, tj. voda ima centralni denzitet4 u odnosu navazduh i kost. Ostala tkiva se nalaze izmedu ovih vrednostu u zavisnostiod svog denziteta. Vrednosti atenuacije brojnih zapreminskih jedinica u telupacijenta, poznate kao i CT vrednosti, mere se i sluze za dobijanje dvodi-menzionalne slike. Na osnovu Haunsfildovih jedinica se moze odrediti den-zitet patoloskih promena na CT pregledu. Na primer, cisticna struktura sahomogenom atenuacionom vrednoscu od oko 0 HU predstavlja jednostavnuvodenu cistu, dok mekotkivna promena sa atenuacionom vrednoscu od oko-100 HU predstavlja leziju koja sadrzi mast. U navedenim slucajevima, lez-ije se mogu smatrati benignim, pa biopsija nije neophodna. Juznoafrikanac,Alen Kormak, je pronasao skalu sive boje, koja je sluzila za slikovno prikazi-vanje koeficijenata atenuacije5 razlicitih tkiva na slici poprecnog preseka.Oba naucnika su 1979. godine nagradena Nobelovom nagradom za medicinui fiziologiju. Prvi skener za kompjuterizovanu tomografiju celog tela, cija
3proces kojim se smanjuje intenzitet zracenja pri prolazu kroz tkivo ili neki drugi ma-terijal
4gustina5opisuje slabljenje X-zraka pri prolasku kroz neki materijal
7

proizvodnja pocinje 1974. godine, je konstruisao naucnik Lendli (Lendley),Potom svi veci klinicki centri u svetu bivaju opremljeni ovim CT aparatima.
Koeficijent atenuacije u matematici predstavlja nenegativnu, realnu fu-nkciju µ definisanu na R3. Za razlicite tacke u objektu imamo u opstemslucaju razlicite vrednosti koeficijenta atenuacije, a u tackama izvan objektauzima se da je koeficijent atenuacije jednak nuli. Da bismo odredili ,,slice”funkcije µ, fiksiracemo koordinatni sistem x = (x1, x2, x3), sto je veoma bitnou tomografiji. U opstem slucaju, fiksira se poslednja koordinata. Za svakufiksiranu vrednost c x3 koordinate, ,,x3”− ,,slice” funkcije µ je funkcija fcdveju promenljivih definisana na sledeci nacin
fc(x1, x2) = µ(x1, x2, c).
Poznavanje kolekcije funkcija {fc : c ∈ [a, b]} ekvivaletno je poznavanju µ zasve tacke ploce {(x1, x2, x3) : x1, x2 ∈ R, a ≤ x3 ≤ b}.
Primer 2.3.1. Neka je D ⊂ Rn. Karakteristicna funkcija skupa D je defin-isana na sledeci nacin
χD(x) =
{1 ;x ∈ D0 ;x /∈ D
Primer 2.3.2. Neka je dat objekat D ⊂ R3 sa konstantnim koeficijentomatenuacije. Funkcija χD modelira ovaj objekat. Objekat je odreden svojimpresecima sa ravnima Hc = {(x1, x2, c)|x1, x2 ∈ R} na sledeci nacin
Dc = D ∩Hc, ∀c
Primer 2.3.3. Neka je koeficijent atenuacije objekta sadrzanog u lopti poluprecnika1 jednak
µ(x) =
{1− ‖x‖ ; ‖x‖ ≤ 1
0 ; ‖x‖ > 1
Tada je
fc(x1, x2) =
{1−
√x21 + x22 + c2 ;
√x21 + x22 + c2 ≤ 1
0 ;√x21 + x22 + c2 > 1
Ukoliko je |c| > 1, tada je fc ≡ 0.
8

Slika 2.2: Dvodimenzionalni ,,slice” trodimenzionalnog objekta
2.4 Razvoj CT uredaja
Sa pojavom prvog modela CT uredaja, javila se i teznja za usavrsavanjemistog. Nastojalo se da snimci budu sto jasniji, tj. da se poboljsa kon-trasna i prostorna rezolucija tkiva. Takode, cilj je bio da vreme trajanjapregleda bude smanjeno na minimum, kao i doza zracenja koju bi pacijentprimio, imajuci u vidu rizik od zracenja bolesnika rendgenskim zracima. Us-avrsavanje CT uredaja odvijalo se kroz nekoliko faza.
Prva generacija CT uredaja funkcionisala je na principu translacije irotacije rendgenske cevi. Sadrzala je samo jedan detektor. Koristio se uski,pravougaoni snop zraka usmeren prema detektoru. U skladu sa nedovoljnorazvijenom tehnologijom, javili su se i nedostaci ove generacije. Pre svega,skeniranje je zahtevalo mnogo vremena (3-5 minuta), a pacijent je morao dabude nepomican za to vreme, sto je bilo neudobno. Dobijene slike su bilegrube. Jos jedan veoma bitan nedostatak prve generacije CT uredaja suvelike doze zracenja pacijenta. Ova generacija CT uredaja je omogucavalasnimanja mozga.
Princip rada druge generacije CT uredaja bio je isti kao i kod prve gen-eracije (kretanje je i dalje translaciono-rotaciono). Sa ovom generacijom sejavljaju i prvi znaci usavrsavanja kao sto su veci broj detektora (i do 16) i
9

siri, lepezasti snop rendgenskih zraka. Ovaj napredak smanjuje vreme tra-janja ekspozicije, kao i zracenje pacijenta, sto je od izuzetnog znacaja. Osimmozga, omoguceno je snimanje ostatka tela pacijenta, organa trbusne dupljei grudnog kosa.
U daljem razvoju CT uredaja, ukinuto je translaciono kretanje, pa se trecageneracija CT uredaja zasniva samo na rotacionom kretanju rendgenske cevii detektorskog luka sa 380-600 detektora oko snimanog dela tela za 360◦.Koriscen je siroki, lepezasti snop rendgenskih zraka. Trajanje ekspozicijepo jednom sloju bilo je 1,4-14s. Ova naprednija generacija CT uredajaomogucila je preciznije snimke celog tela i svih organa.
Cetvrtu generaciju CT uredaja prati povecane detektora na 1200 do 2000.Detektori su smesteni u kruzni prsten sto je omogucilo kontinuiranu rotacijui metodu spiralnog snimanja. Vreme ekspozicije po jednom sloju se drasticnosmanjilo na jednu do tri sekunde.
10

Slika 2.3: CT uredaj
Pojava spiralnog CT uredaja dovodi do znatno kraceg vremena trajanjapregleda, jer uredaj omogucava skeniranje celog tela pacijenta bez pauzeizmedu snimanja pojedinih slojeva tela sto je bio slucaj kod prve tri generacijeCT uredaja. Pregled organa trbusne duplje spiralnim CT aparatom danastraje najvise dva minuta, a dobija se i bolji kvalitet snimaka.
11

Glava 3
Furijeova transformacija
3.1 Furijeova transformacija funkcija u L1(R)
Definicija 3.1.1. Neka je funkcija f L1−funkcija definisana na R. Furijeovatransformacija funkcije f , u oznaci f , je funkcija definisana na R:
f(ξ) =
∞∫−∞
f(x)e−ixξ dx
Definicija 3.1.2. Neka su funkcije f i f , definisane na R, L1 funkcije. Tada
f(x) =1
2π
∞∫−∞
f(ξ)eixξ dξ (3.1)
Formula (3.1) se naziva inverzna Furijeova transformacija.
Napomenimo da se u literaturi srecu razne slicne definicije Furijeove trans-formacije koje se obicno razlikuju po multiplikativnom faktoru.
Inverzna Furijeova transformacija predstavlja osnovu svih rekonstrukcionihmetoda za dobijanje slike koji se koriste u medicini.
Za Furijeovu i inverznu Furijeovu transformaciju cesto se koriste sledeceoznake
F(f) =
∞∫−∞
f(x)e−ixξ dx
12

i
F−1(f) =1
2π
∞∫−∞
f(ξ)eixξ dξ
Teorema 3.1.1. Neka je j pozitivan ceo broj. Ako funkcija f ima j integra-bilnih izvoda, tada postoji konstanta C da vazi
|f(ξ)| ≤ C
(1 + |ξ|)j.
Za 1 ≤ ` ≤ j, Furijeova transformacija za f [`] je tada na sledeci nacin
f [`](ξ) = (iξ)`f(ξ).
3.2 Furijeova transformacija funkcija u L1(Rn)
Neka x ∈ Rn, tj. x = (x1, x2, . . . , xn), gde je xi i-ta koordinata vek-tora x. Furijeova transformacija funkcije n promenljivih je takode funkcija npromenljivih. Neka je ξ tacka u prostoru Furijeovih transformacija funkcijan promenljivih, tj. ξ = (ξ1, ξ2, . . . , ξn).
Definicija 3.2.1. Neka je funkcija f definisana na Rn. Za funkciju f kazemoda je lokalno integrabilna ukoliko je integral∫
‖x‖<R
|f(x)| dx
definisan i konacan za svako R. Funkcija f je apsolutno integrabilna ili L1
funkcija ukoliko vazi
‖f‖1 =
∫Rn
|f(x)| dx <∞
Definicija 3.2.2. Neka je f ∈ L1(Rn). Furijeova transformacija funkcije f ,u oznaci f , je
f(ξ) =
∫Rn
f(x)e−i〈x,ξ〉 dξ za ξ ∈ Rn
13

Neka je ξ = rω, r = ‖ξ‖ je intenzitet ξ, a ω njegov pravac. Neka jex = x′+ tω, gde je x′ ortogonalan na ω. Tada 〈x,ω〉 = t, pa funkcija 〈x,ω〉zavisi samo od t. Vazi da je
ei〈x,ξ〉 = eirt.
Furijeova transformacija u ξ = rω se moze izraziti kao
f(rω) =
∞∫−∞
∫L
f(x′ + tω)e−irt dx′ dt,
gde je L (n− 1)−dimenzionalni potprostor prostora Rn ortogonalan na ω :
L = {x′ ∈ Rn, 〈x′,ω〉 = 0}.dx′ je (n− 1)− dimenzionalna Euklidska mera na L.
Definicija 3.2.3 (Inverzna Furijeova transformacija). Neka je f ∈L1(Rn). Ako je f ∈ L1(Rn), tada
f(x) =1
(2π)n
∫Rn
f(ξ)ei〈x,ξ〉 dξ
Multi-indeks je uredena n−torka nenegativnih, celih brojeva. Obicnose oznacava malim, podebljanim grckim slovom. Za α, multi-indeks, vaziα! = α1! · α2! · · · αn! i |α| = α1 + α2 + · · ·+ αn. Neka je x = (x1, x2, . . . , xn).Tada je xα = xα1
1 xα22 · · · xαn
n i ∂αx = ∂α1x1∂α2x2· · · ∂αn
xn .
Teorema 3.2.1. Neka je f neprekidna, L1− funkcija koja ima neprekidan,apsolutno integrabilan, α−ti parcijalni izvod za svako α tako da je |α| ≤ k.Tada postoji konstanta C da vazi
|f(ξ)| ≤ C
(1 + ‖ξ‖)k
i∂xαf(ξ) = (iξ)αf(ξ).
Teorema 3.2.2. Neka je f neprekidna L1− funkcija koja ima apsolutnointegrabilan, neprekidan, j-ti parcijalni izvod. Tada je
F(∂xjf)(ξ) = iξjF(f)(ξ).
14

3.3 Furijeova transformacija funkcija u L2(R)
Neka je f ∈ L2(R). Za svako R > 0, definisimo
fR(ξ) =
R∫−R
f(x)e−ixξ dξ
Definicija 3.3.1. Furijeova transformacija funkcije f ∈ L2(R) je odredenasa
f = limR→∞
fR
Za funkciju f ∈ L2(R) definisemo
fR(x) =1
2π
R∫−R
f(ξ)eixξ dξ.
Teorema 3.3.1 (Inverzna Furijeova formula). Neka je funkcija f ∈L2(R). Inverzna Furijeova transformacija funkcije f je
f = limR→∞
fR
Teorema 3.3.2 (Parsevalova formula). Ako je f apsolutno integrabilna iintegrabilna sa kvadratom, tada je i f kvadratno integrabilna i vazi
∞∫−∞
|f(x)|2 dx =1
2π
∞∫−∞
|f(ξ)|2 dξ
Naredna osnovna svojstva Furijeove transformacije funkcija u L2(R) proizilazeiz osnovnih svojstava integrala.
• LinearnostF(f + g) = F(f) + F(g)
,F(αf) = αF(f), α ∈ C
15

• Furijeova transformacija funkcije f(ax), gde je a ∈ R, je data sa
∞∫−∞
f(ax)e−iξx dx =1
af
(ξ
a
)
• Furijeova transformacija translirane funkcije ft(x) = f(x− t) je
ft(ξ) = f(ξ)e−iξt
• Ako f ima realne vrednosti, tada je
f(ξ) = f(−ξ)
• f ima realne vrednosti, ako je funkcija f parna funkcija sa realnimvrednostima. Ako f je neparna funkcija sa realnim vrednostima, tadaf ima cisto imaginarne vrednosti. Ako je funkcija f parna, tada je injena Furijeova transformacija parna i odredena je na sledeci nacin
f(ξ) = 2
∞∫0
f(x) cos(ξx) dx
Teorema 3.3.3. Neka je j pozitivan ceo broj. Funkcija f ∈ L2(R) ima j L2
izvoda ako i samo ako ξj f(ξ) ∈ L2(R). Tada za 1 ≤ ` ≤ j vazi
f [`](ξ) = (iξ)`f(ξ).
3.4 Furijeova transformacija funkcija u L2(Rn)
Definicija 3.4.1. Neka je f kompleksna funkcija definisana na Rn. Funkcijaf je L2−funkcija ili kvadratno integrabilna ako vazi
‖f‖2L2 =
∫Rn
|f(x)|2 dx <∞
16

Skup kvadratno integrabilnih funkcija sa normom ‖·‖L2 oznacavamo sa L2(Rn).Norma u L2(Rn) je definisana skalarnim proizvodom
〈f, g〉L2 =
∫Rn
f(x)g(x) dx
Teorema 3.4.1 (Kosi-Svarcova nejednakost). Neka su f, g ∈ L2(Rn).Tada je
|〈f, g〉|L2 ≤ ‖f‖2L2‖g‖2L2
Analogno slucaju f ∈ L2(R), definisacemo Furijeovu transformaciju funkcijef ∈ L2(Rn).
Definicija 3.4.2. Neka je
fR(ξ) =
∫‖x‖<R
f(x)e−i〈ξ,x〉 dx.
Furijeova transformacija f ∈ L2(Rn) je
f = limR→∞
fR
Teorema 3.4.2 (Inverzna Furijeova transformacija). Neka je f ∈ L2(Rn)i
fR(x) =1
(2π)n
∫‖ξ‖<R
f(ξ)ei〈ξ,x〉 dξ.
Tada je f = limR→∞
fR.
Posmatracemo sada osnovna svojstva Furijeove transformacije funkcija uL1(Rn) i L2(Rn)
• LinearnostF(f + g) = F(f) + F(g)
,F(αf) = αF(f), α ∈ C
17

• Furijeova transformacija funkcije f(ax), gde je a ∈ R, je data sa∫Rn
f(ax)e−i〈ξ,x〉 dx =1
anf(ξ
a)
• Furijeova transformacija funkcije ft(x) = f(x− t), gde je t vektor, je
ft(ξ) = f(ξ)e−i〈ξ,t〉
• Ako f(x) ima realne vrednosti, tada je
f(ξ) = f(−ξ)
• f ima realne vrednosti, ako je funkcija f parna funkcija sa realnimvrednostima. Ako f je neparna funkcija sa realnim vrednostima, tadaf ima cisto imaginarne vrednosti.
Teorema 3.4.3 (Parsevalova formula). Neka je funkcija f apsolutnointegrabilna i integrabilna sa kvadratom. Tada je∫
Rn
|f(x)|2 dx =1
(2π)n
∫Rn
|f(ξ)|2 dξ.
3.5 Konvolucija
Definicija 3.5.1. Neka je f L1−funkcija definisana na Rn i g ogranicena,lokalno integrabilna funkcija. Konvolucija funkcija f i g u oznaci, f ∗ g, jefunkcija na Rn odredena sa
(f ∗ g)(x) =
∫Rn
f(x− y)g(y) dy
Teorema 3.5.1. Neka su funkcije f , g, h definisane na L1(Rn). Konvolucijaima svojstva komutativnosti, distributivnosti i asocijativnosti, tj.
18

• f ∗ g = g ∗ f
• f ∗ (g + h) = f ∗ g + f ∗ h
• f ∗ (g ∗ h) = (f ∗ g) ∗ h
Teorema 3.5.2. Neka su f, g ∈ L1(Rn). Tada vazi
F(f ∗ g) = F(f)F(g)
Teorema 3.5.3. Neka je funkcija f lokalno integrabilna, a g funkcija saogranicenim nosacem i k neprekidnih parcijalnih izvoda. Tada i f ∗ g ima kneprekidnih parcijalnih izvoda i vazi
∂αx (f ∗ g) = f ∗ (∂αx g), |α| ≤ k
19

Glava 4
Radonova transformacija
4.1 Prostor pravih u ravni
Prava u ravni je skup tacaka koje zadovoljavaju jednacinu oblika
ax+ by = c,
gde je a2 + b2 6= 0. Prethodnu jednacinu mozemo zapisati i na sledeci nacin:
a√a2 + b2
x+b√
a2 + b2y =
c√a2 + b2
.
Koeficijent ( a√a2+b2
, b√a2+b2
) definise tacku ω na jedinicnoj kruznici6, S1 ⊂R2, a konstanta c√
a2+b2moze biti bilo koji broj. Prave u ravni parametrizo-
vane su parom koji cine jedinicni vektor ω = (ω1, ω2) i realan broj t.Prava `t,ω je skup tacaka u R2 koja zadovoljava jednacinu
〈(x, y),ω〉 = t. (4.1)
Vektor ω je normalan na tu pravu.U nekim slucajevima, pogodno je da tacku jedinicnog kruga parametrizu-
jemo realnim brojem. Stavicemo
ω(θ) = (cos θ, sin θ).
6S1 def= {x ∈ R2, ‖x‖2 = 1}, ‖x‖2 = ‖(x1, x2)‖2
def=√x1
2 + x22
20

Zapazamo da je ω(θ) = ω(θ+2π) ista tacka jedinicnog kruga, jer su sin i cos2π periodicne funkcije. Koristeci ovu parametrizaciju, dobijamo jednacinu
〈(x, y), (cos θ, sin θ)〉 = t,
cija su resenja `t,ωdef= `t,ω(θ).
Ako je (t,ω) = (−t,−ω), skup tacaka koje zadovoljavaju (4.1) ostaje isti,pa sledi
`t,ω = `−t,−ω
Takode, iz jednakosti `t1,ω1 = `t2,ω2 , proizilazi da je ili (t1 = t2 ∧ω1 = ω2) ili(t1 = −t2 ∧ ω1 = −ω2.)
Uredeni par (t,ω) odreduje orijentisanu pravu. Vektor ω = (−ω2, ω1) jeortogonalan sa ω i zato paralelan pravoj `t,ω. Vektor ω biramo iz uslova daje determinanta matrice (
ω1 −ω2
ω2 ω1
)jednaka +1, tj. ω(θ) = (− sin θ, cos θ). Vektorom ω se definise pozitivanpravac ili orijentacija prave `t,ω.
Teorema 4.1.1. Parovi (t,ω) ∈ R×S1 su u bijekciji sa skupom orijentisanihpravih u ravni.
Slika 4.1: Parametrizacija orijentisanih pravi u ravni
21

Vektor ω je pravac normalan na pravu, a broj t nazivamo afini parametarprave; |t| predstavlja rastojanje prave od koordinatnog pocetka. Uredeni par(t,ω) definise dve poluravni:
H+t,ω = {x ∈ R2|〈x,ω〉 > t}
iH−t,ω = {x ∈ R2|〈x,ω〉 < t},
cija je granica prava `t,ω.
Na osnovu predstavljanja ω ∈ S1 na sledeci nacin
ω(θ) = (cos θ, sin θ),
mozemo poistovetiti R× S1 sa R× [0, 2π). Zbog ovoga, d θ se moze koristitikao element prave u S1−pravcu. Integral funkcije h po S1 × R je dat sa
2π∫0
∞∫−∞
h(t,ω(θ)) dt dθ,
koji se cesto oznacava2π∫0
∞∫−∞
h(t,ω) dt dω.
Definicija 4.1.1. Skup L2(R × S1) sadrzi lokalno integrabilne funkcije sarealnim vrednostima za koje je kvadratni integral,
‖h‖2L2(R×S1) =
2π∫0
∞∫−∞
|h(t,ω(θ))|2 dt dθ,
konacan.
Funkcija h u R×S1 je neprekidna ako je h(t, θ)def= h(t,ω(θ)) 2π−periodicna
po θ i neprekidna kao funkcija na R × [0, 2π]. h je diferencijabilna ako je2π−periodicna i diferencijabilna na R × [0, 2π] i ∂θh je 2π−periodicna. Di-ferencijabilnost viseg reda ima slicne definicije.
22

Definicija 4.1.2. Neka je funkcija f definisana na Rn. Tacka x pripadanosacu funkcije f ako postoji niz tacaka {xn} da vazi:
• f(xn) 6= 0
• limn→∞
xn = x
Nosac funkcije f se oznacava sa supp(f).
Primer 4.1.1. Neka je D ⊂ Rn. Nosac funkcije χD je zatvorenje skupa D,tj. skup svih tacaka cije se granicne vrednosti nizova nalaze u D. Podsetimo,takav skup se naziva zatvoren skup.
Primer 4.1.2. Nosac funkcije f(x) = x je skup R, iako je f(0) = 0. Pos-matrajmo funkciju f(x, y) = xy. Nosac ove funkcije je cela ravan, iako jef(0, y) = f(x, 0) = 0. Nosac funkcije χ(0,1)(x) je [0, 1].
Definicija 4.1.3. Za funkciju f kazemo da ima ogranicen nosac ako pos-toji R da vazi f(x) = 0 ako ‖x‖ > R. Kazemo da je nosac funkcije f sadrzanu lopti poluprecnika R.
4.2 Radonova transformacija
Razmotricemo matematicki model CT uredaja. Posmatracemo dvodi-menzionalnu krisku trodimenzionalnog objekta i njen atenuacioni koeficijentf. Slabljenje intenziteta X-zraka, I(t,ω), duz prave `t,ω pri prodoru u objekatje dato diferencijalnom jednacinom koja predstavlja Beerov zakon7:
dI(t,ω)ds
= −fI(t,ω),
gde je s duzina duzi koja se dobija u preseku objekta i prave kojom putujuX-zraci. Nakon integraljenja dobijamo∫
`t,ω
f ds = log
[I0,(t,ω)I1,(t,ω)
],
7zakon povezuje slabljenje X-zraka sa osobinama objekta kroz koji X-zraci prolaze
23

gde I0,(t,ω) predstavlja pocetni intenzitet X-zraka u tacki x0 u kojoj X-zraciprodiru u objekat, a I1,(t,ω) oznacava intenzitet X-zraka u tacki x1 u kojojX-zraci izlaze iz objekta. I0,(t,ω) i I1,(t,ω) su poznate vrednosti. Leva stranajednakosti predstavlja Radonovu transformaciju funkcije f. Cilj je odreditinepoznatu funkciju f uz pomoc inverzne Radonove transformacije. Poznatje samo skup vrednosti Rf za konacan broj pravih `t,ω koje prolaze krozobjekat, sto ujedno predstavlja i manu.
Radonova transformacija je integralna transformacija koja funkciju defin-isanu u ravni slika u funkciju definisanu na dvodimenzionalnom prostorupravih u ravni, i cija vrednost na konkretnoj pravoj je jednaka krivolini-jskom integralu funkcije po toj pravoj. Radonovu transformaciju je otkrioaustrijski matematicar Radon8 1917. godine. Veoma bitnu ulogu ima ukompjuterizovanoj tomografiji.
Definicija 4.2.1. Pretpostavimo radi jednostavnosti da je funkcija f defin-isana u ravni neprekidna sa ogranicenim nosacem. Integral funkcije f duzprave `t,ω je
Rf(t,ω) =
∫`t,ω
f ds
=
∞∫−∞
f(sω + tω) ds
=
∞∫−∞
f(tω1 − sω2, tω2 + sω1) ds
Kolekcija integrala funkcije f duz pravih u ravni definise funkciju naR× S1, koja se naziva Radonova transformacija funkcije f .
Kada je rec o upotrebi CT uredaja u medicini, cesto se pretpostavljada je vazduh propustljiv za X-zrake, pa je koeficijent atenuacije (u matem-atici to je funkcija f) jednak nuli u svim tackama van posmatranog objekta(obicno pacijenta). Uopsteno govoreci, posmatramo konacan broj kriski (ko-lutova) nekog objekta na osnovu kojih zelimo da rekonstruisemo njegovu
8Johann Karl August Radon, 1887-1956, austrijski matematicar. Doktorirao je naUniverzitetu u Becu 1910. godine.
24

unutrasnjost. U skladu sa tim je i uslov da funkcija ima ogranicen nosac,tj. da postoji oblast izvan koje je funkcija jednaka nuli, a posmatrano saaspekta fizike koeficijent atenuacije je nula van te oblasti.
Medutim, nije nuzno da funkcija bude neprekidna ili sa ogranicenimnosacem. Za funkciju f , cija je restrikcija na svakoj pravoj lokalno inte-grabila, tj.
∞∫−∞
|f(tω + sω)| ds <∞ ∀(t,ω) ∈ R× S1 (4.2)
mozemo definisati Radonovu transformaciju. Funkcije za koje vazi (4.2) senalaze u prirodnom domenu Radonove transformacije. To su u stvari dvarazlicita uslova:
• funkcija je dovoljno regularna da je njena restrikcija na bilo kojoj pravojlokalno integrabilna
• funkcija tezi nuli dovoljno brzo da nesvojstveni integral konvergira.
Posmatrajmo funkciju f ≡ 1. Funkcija ne opada u beskonacnosti, pa se nenalazi u prirodnom domenu Radonove transformacije. Za funkciju f(x, y) =(x2 + y2)−1 integral (4.2) je divergentan u t = 0, pa ni ova funkcija ne pri-pada prirodnom domenu Radonove transformacije. Razumevanje prirodnogdomena Radonove transformacije je od vaznosti u matematici. U medicinipaznja je usmerena ka deo po deo neprekidnim funkcijama koje su nula vannekog diska.
Teorema 4.2.1 (Osnovna svojstva Radonove transformacije). Nekasu funkcije f i g definisane na prirodnom domenu Radonove transformacije.Tada vazi
• Radonova transformacija je linearna
R(αf) = αR ∀α ∈ R
R(f + g) = Rf +Rg
• Radonova transformacija je parna funkcija
Rf(t,ω) = Rf(−t,−ω)
25

• Radonova transformacija je monotona. Ako je f nenegativna u prirod-nom domenu Radonove transformacije, sledi
Rf(t,ω) ≥ 0 ∀(t,ω)
Dokaz. Linearnost Radonove transformacije sledi iz linearnosti integraladuz prave. Iz `t,ω = `−t,−ω zakljucujemo o parnosti Radonove transformacije.Monotonost Radonove transformacije proizilazi iz analogne osobine integrala.
Primer 4.2.1. Neka je E ⊂ R2. Radonova transformacija funkcije χE jeduzina duzi koja se dobija u preseku skupa E i `t,ω. Ako je skup E zatvoren,ogranicen podskup R2, tada funkcija χE pripada prirodnom domenu Radonovetransformacije. Ovakve funkcije opisuju objekte sa konstantnim koeficijentomatenuacije.
Primer 4.2.2. Neka je data funkcija
f(x, y) =
{1 ; (x, y) = (0, 0)
0 ; (x, y) 6= (0, 0)
Radonova transformacija date funkcije je Rf(t,ω) = 0 za svako (t,ω).
Definicija 4.2.2. Skup
Br(a) = {x : ‖x− a‖ < r}
predstavlja loptu u Rn sa centrom u a poluprecnika r.Br(0) oznacavamo krace sa Br. Skup Br(a) u R2 se naziva disk.
Primer 4.2.3. Posmatracemo disk u R2 poluprecnika 1 i funkciju χB1. Radonovatransformacija funkcije χB1 je
RχB1(t,ω) =
{2√
1− t2 ; |t| ≤ 1
0 ; |t| > 1
Za |t| > 1 imamo pravu `t,ω koja ne preseca skup B1.
26

Primer 4.2.4. Neka je funkcija f definisana na sledeci nacin:
f(x, y) =
{1−
√x2 + y2 ;x2 + y2 ≤ 1
0 ;x2 + y2 > 1
Slika 4.2: Konus definisan funkcijom f
Slika 4.3: Grafik Radonove transformacije konusa
27

Definicija 4.2.3. Funkcija definisana na Rn je radijalna funkcija ako njenavrednost zavisi samo od rastojanja od koordinatnog pocetka. Tada postojifunkcija jedne promenljive, oznacimo je sa F , tako da vazi
f(x) = F (‖x‖).
Primer 4.2.5 (Radonova transformacija radijalne funkcije). Fik-siracemo pravac ω = (1, 0), pa sledi
Rf(t,ω) =
∞∫−∞
f(t, s) ds
=
∞∫−∞
F (√t2 + s2) ds
Koristicemo smenu promenljivih r2 = t2 + s2, 2rdr = 2sds. Dalje sledi
Rf(t,ω) = 2
∞∫t
F (r)r√r2 − t2
dr
Dobili smo Radonovu transformaciju radijalne funkcije koja predstavlja jednodi-menzionalnu integralnu transformaciju.
Teorema 4.2.2. Neka su f i g deo po deo neprekidne funkcije sa ogranicenimnosacem. Tada je
R[f ∗ g](t,ω) =
∞∫−∞
Rf(s,ω)Rg(t− s,ω) ds.
Dokaz. Fiksirajmo pravac ω. Koordinate (s, t) su definisane na sledecinacin:
(s, t) 7−→ sω + tω
Ovo je ortogonalna smena promenljivih, pa je element povrsine u R2 dat sadsdt. Konvolucija funkcija f i g je sada
28

f ∗ g(sω + tω) =
∞∫−∞
∞∫−∞
f(aω + bω)g((s− a)ω + (t− b)ω) da db.
U Radonovoj transformaciji f ∗ g menjamo mesta integraciji
R[f ∗ g](τ,ω) =
∞∫−∞
(f ∗ g)(τω + sω) ds
=
∞∫−∞
∞∫−∞
∞∫−∞
f(aω + bω)g((s− a)ω + (τ − b)ω) da db ds
=
∞∫−∞
∞∫−∞
∞∫−∞
f(aω + bω)g((s− a)ω + (τ − b)ω) ds da db
=
∞∫−∞
Rf(b,ω)Rg(τ − b,ω) db.
Komentar 4.2.1. Radonova transformacija konvertuje konvoluciju u ravniu konvoluciju po afinom parametru.
Komentar 4.2.2. Glatkoca funkcije sa ogranicenim nosacem se opaza usvojstvu brzine opadanja njene Furijeove transformacije. Takode, glatkocafunkcije sa ogranicenim nosacem ogleda se i u glatkoci njene Radonove trans-formacije po afinom parametru, sto zakljucujemo iz prethodne teoreme. Nekaje f neprekidna funkcija sa ogranicenim nosacem, ϕ radijalno simetricnafunkcija sa ogranicenim nosacem i neprekidnim parcijalnim izvodima reda k.Radonova transformacija konvolucije
R(f ∗ ϕ)(t,ω) =
∞∫−∞
Rf(τ,ω)Rϕ(t− τ) dτ,
je barem onoliko glatka koliko je glatka Rϕ u t.
29

Neka je fv(x) = f(x − v) za v ∈ R2 translacija funkcije f za vektorv. Povezanost Radonove transformacije funkcije f i funkcije fv nam dajesledeca teorema.
Teorema 4.2.3. Neka je f deo po deo neprekidna funkcija sa ogranicenimnosacem. Tada je
Rfv(t,ω) = Rf(t− 〈ω,v〉,ω). (4.3)
Lema 4.2.1. Neka je f funkcija sa ogranicenim nosacem i neprekidnimprvim parcijalnim izvodima. Tada je Rf(t,ω) diferencijabilna po t i
R∂xf(t,ω) = ω1∂tRf(t,ω)
R∂yf(t,ω) = ω2∂tRf(t,ω).
Dokaz. Dokaz cemo izvesti za parcijalni izvod po x. Postupak je analogani za parcijalni izvod po y. Neka je e1 = (1, 0). Parcijalni izvod funkcije f popromenljivoj x je definisan na sledeci nacin
∂xf(x) = limh→0
fhe1(x)− f(x)
−h
Na osnovu (4.3) i linearnosti Radonove transformacije, zakljucujemo
R[fhe1 − f−h
](t,ω) =
Rf(t− hω1,ω)−Rf(t,ω)
−h.
Zatim, pustimo da h −→ 0.Ovaj rezultat prosirujemo i za parcijalne izvode visih redova.
Teorema 4.2.4. Neka je funkcija f sa ogranicenim nosacem i ima neprekidneparcijalne izvode reda k. Tada je Rf(t,ω) k−puta diferencijabilna po t i, zanenegativne cele brojeve i i j za koje vazi i+ j ≤ k, je
R[∂ix∂
jyf]
(t,ω) = ωi1ωj2∂
i+jt Rf(t,ω).
30

Neka je A : R2 → R2 cvrsta rotacija ravni, tj. linearno preslikavanje takoda
〈Av, Aω〉 = 〈v,ω〉 ∀v,ω ∈ R2.
Ukoliko je f deo po deo neprekidna funkcija sa ogranicenim nosacem,tada je fA(x) = f(Ax).
Veza izmedu Radonove transformacije funkcije fA i funkcije f data je nared-nom teoremom.
Teorema 4.2.5. Neka je A : R2 → R2 cvrsta rotacija ravni i neka je f deopo deo neprekidna funkcija sa ogranicenim nosacem. Tada
RfA(t,ω) = Rf(t, Aω).
Dokaz. Vazi 〈Aω, Aω〉 = 〈ω, ω〉 = 0.
RfA(t,ω) =
∞∫−∞
f(t Aω + sAω) ds = Rf(t, Aω).
Primer 4.2.6. Posmatrajmo funkciju
f(x, y) =
{1 ;x ∈ [−1, 1] ∧ y = 0
0 ;x /∈ [−1, 1] ∨ y 6= 0
Rf(t,ω) = 0 ako je ω 6= (0,±1) i R(0, (0,±1)) = 2. U ovom slucaju,Radonova transformacija je nula osim za izvesne prave. Vazice da je Rf =Rf ako funkciju f zamenimo funkcijom f koja je 1 na nekom drugom pod-skupu od R× {0} ukupne duzine 2. Ovo nam pruza netrivijalne primere gdeRadonova transformacija ne sadrzi dovoljno informacija da bi razlikovala dvefunkcije.
Definicija 4.2.4. Kaze se da E ⊂ Rn ima n-dimenzionalnu meru nula akoza svako ε > 0 postoji familija lopti Bri(xi) da vazi
E ⊂∞⋃i=1
Bri(xi)
31

i∞∑i=1
rni < ε.
Takav skup ne nosi nikakvu n− dimenzionalnu masu.
Na primer, tacka je skup mere nula na pravoj, prava je skup mere nula uravni, a ravan je skup mere nula u R3.
Teorema 4.2.6. Neka je funkcija f definisana u ravni ciji je nosac skup merenula. Tada je skup uredenih parova (t,ω) ∈ R× S1 za koje je Rf(t,ω) 6= 0skup mere nula.
Teorema 4.2.7. Neka je funkcija f definisana u ravni tako da vazi da jef(x, y) = 0 za x2 + y2 > R2. Tada je
Rf(t,ω) = 0 za |t| > R.
Dokaz. Za |t| > R bilo koja prava `t,ω se nalazi izvan nosaca funkcije f ,pa je na osnovu definije Rf(t,ω) = 0 za |t| > R.
Zapitajmo se da li vazi obrat prethodne teoreme. Naredni primer ce nampomoci da dobijemo ispravan odgovor.
Primer 4.2.7. Definisimo funkciju u polarnim koordinatama
fn(r, θ) = r−n cos(nθ)
za svako n > 1. Ove funkcije ne pripadaju prirodnom domenu Radonovetransformacije zato sto mnogo brze teze ka ∞ u r = 0 nego r−1. To je zatosto se funkcije ne mogu integraliti duz bilo koje prave koja prolazi kroz (0, 0).Sa druge strane, integrali Radonove transformacije Rfn(t,ω) apsolutno kon-vergiraju za svako t 6= 0, jer fn teze nuli, kao i r−1 kada r →∞ i n > 1.
Lema 4.2.2. Integrali ∫`t,ω
fn(tω + sω) ds
su apsolutno konvergentni i jednaki nuli za svako n > 1, t 6= 0, i ω ∈ S1.
32

S obzirom da vazi
∞∫−∞
|fn(−s sin θ, s cos θ)| ds =∞
za svako θ, funkcije fn ne pripadaju prirodnom domenu Radonove transfor-macije. Medutim, Rfn(t,ω) = 0 za ∀t 6= 0. Rfn ima nosac mere nula{0} × S1.Dodefinisacemo funkcije fn za svako n do funkcije Fn koja ce pripadati prirod-nom domenu Radonove transformacije da vazi RFn(t,ω) = 0 za ∀(t,ω),|t| > 1 :
Fn(r, θ) =
{fn(r, θ) , r > 1
0 , r ≤ 1
Funkcije Fn ne iscezavaju van diska poluprecnika 1.Prave `t,ω, gde je |t| > 1, se nalaze potpuno van diska poluprecnika 1. Na
osnovu pomenute leme, sledi da je
RFn(t,ω) =
∫`t,ω
fn ds = 0.
Takode vazi da su funkcije Fn ogranicene u okolini tacke (0, 0), pa je zatoRFn(t,ω) definisana za svako (t,ω) ∈ R × S1. Dakle, zakljucili smo daiako funkcija van diska poluprecnika r nije jednaka nuli, njena Radonovatransformacija moze iscezavati za svako t koje je |t| > r.
Dakle, u opstem slucaju obrat prethodne teoreme ne vazi.
4.3 Inverzna Radonova transformacija
U rekonstruisanju slike u medicini, Furijeova transformacija i Radonovatransformacija su povezane teoremom koja se naziva centralna ,,slice” teo-rema.
Teorema 4.3.1 (Centrala ,,slice” teorema). Neka je f apsolutno inte-grabilna funkcija na prirodnom domenu R. Za ∀r ∈ R i jedinicni vektor ω,
33

vazi∞∫
−∞
Rf(t,ω)e−itr dt = f(rω).
Dokaz. Na osnovu definicije Radonove transformacije, sledi
∞∫−∞
Rf(t,ω)e−itr dt =
∞∫−∞
∞∫−∞
f(tω + sω)e−itr ds dt.
Integral je apsolutno konvergentan, pa koristeci smenu promenljivih da jex = tω + sω, t = 〈x,ω〉 i Jakobijan jednak jedinici, dobijamo
∞∫−∞
∞∫−∞
f(tω + sω)e−itr ds dt =
∫R2
f(x)e−i〈x,ω〉r dx = f(rω).
Centralna ,,slice” teorema nam pokazuje da dvodimenzionalna Furijeovatransformacija, f(rω), je jednodimenziona Furijeova transformacijaRf(t,ω).
Definisacemo Furijeovu transformaciju funkcije f(x), x = (x, y), na sledecinacin
f(w) =
∞∫−∞
∞∫−∞
f(x)e−2πı〈x,w〉 dx dy.
Oznacicemo Rα[f ](s) = R[f ](αs). Centralna ,,slice” teorema kazuje da je
Rα[f ](σ) = f(σn(α)),
gde je n(α) = (cosα, sinα). Zakljucujemo da je dvodimenzionalna Furijeovatransformacija pocetne funkcije duz prave pod uglom nagiba α je jednodi-menzionalna Furijeova transformacija Radonove transformacije (uzete poduglom α) te pocetne funkcije.
Neka je dat vektor ξ. Skalarni proizvod 〈x, ξ〉 je konstantan duz bilokoje prave koja je normalna na pravac vektora ξ. Prethodna teorema nampredstavlja izracunavanje Furijeove transformacije u ξ u dva koraka.
34

• Kada integralimo funkciju duz bilo koje prave koja je normalna napravac vektora ξ, dobijamo funkciju koja zavisi samo od afinog parame-tra.
• Potom, izracunavamo jednodimenzionu Furijeovu transformaciju dobi-jene funkcije koja zavisi samo od afinog parametra.
Primer 4.3.1. Neka je e1 = (1, 0) , e2 = (0, 1) i (t,ω) = (x, e1). Kako jee1 = e2, Radonova transformacija funkcije f u (x, e1) je
Rf(x, e1) =
∞∫−∞
f(xe1 + ye2) dy =
∞∫−∞
f(x, y) dy
Furijeova transformacija Rf(x, e1) je
∞∫−∞
Rf(x, e1)e−irx dx =
∞∫−∞
∞∫−∞
f(x, y)e−irx dy dx
Kako je 〈re1, (x, y)〉 = rx, to je ovo definicija f(re1).
Neka je
h(r,ω)def=
∞∫−∞
h(t,ω)e−itr dt
jednodimenzionalna Furijeova transformacija funkcije h(t,ω) definisane naR× S1. Ukoliko h(t,ω) ∈ L2(R) za fiksirano ω, tada iz jednodimenzionalneParsevalove formule sledi
∞∫−∞
|h(t,ω)|2 dt =1
2π
∞∫−∞
|h(r,ω)|2 dr
Uz pomoc Parsevalove formule za 2D-Furijeovu transformaciju i centralne,,slice” teoreme dolazimo do Parsevalove formule za Radonovu transforma-ciju.
35

Teorema 4.3.2 (Parsevalova formula za Radonovu transforma-ciju). Neka je funkcija f , definisana na prirodnom domenu Radonove trans-formacije, kvadratno integrabilna. Tada∫
R2
|f(x)|2 dx =1
(2π)2
π∫0
∞∫−∞
|Rf(r,ω)|2|r| dr dω.
Dokaz. Dokazacemo teoremu uz dodatnu pretpostavku da je f i apso-lutno integrabilna. Na osnovu centralne ,,slice” teoreme i parnosti Radonovetransformacije funkcije f , iz koje sledi Rf(r,ω) = Rf(−r,−ω), dobijamo
∫R2
|f(x)|2 dx =1
(2π)2
2π∫0
∞∫0
|f(rω)|2r dr dω
=1
(2π)2
π∫0
∞∫−∞
|Rf(r,ω)|2|r| dr dω
Ukoliko izuzmemo dodatnu pretpostavku za funkciju f, aproksimiracemoistu apsolutno integrabilnim funkcijama. Neka je ϕ nenegativna, beskonacnodiferencijabilna, radijalna funkcija na disku poluprecnika 1 sa totalnim in-tegralom 1. Stavimo ϕε(x) = ε−2ϕ(ε−1x) za ε > 0. Glatka funkcija saogranicenim nosacem koja aproksimira funkciju f data je sa
fε = [χ[0,ε−1](r)f ] ∗ ϕεZa ε > 0, funkcije zadovoljavaju pretpostavke centralne ,,slice” teoreme iParsevalove formule za Radonovu transformaciju, pa se prethodni argumentmoze primeniti na fε. Pokazujuci da vazi
1
(2π)2
π∫0
∞∫−∞
|Rf(r,ω)|2|r| dr dω = limε↓0
1
(2π)2
π∫0
∞∫−∞
|Rf ε(r,ω)|2|r| dr dω
i da fε konvergira ka f u L2(R2) kada ε→ 0, dokaz teoreme je kompletan.
Definisacemo operator diferenciranja reda 12
na sledeci nacin
D 12Rf(t,ω) =
1
2π
∞∫−∞
Rf(r,ω)|r|12 eirt dr.
36

Sada mozemo izraziti Parsevalovu formulu kao integral na prostoru ori-jentisanih pravih∫
R2
|f |2 dx dy =1
2π
π∫0
∞∫−∞
|D 12Rf(t,ω)|2 dt dω.
Komentar 4.3.1. Prethodna teorema implicira da R nema ekstenziju koja jeneprekidno preslikavanje prostora L2(R2) na prostor L2(R2×S1) i da R−1 nemoze biti neprekidno preslikavanje prostora L2(R2 × S1) na prostor L2(R2).Ovo proizilazi iz
‖h‖2L2(R×S1) =1
2π
2π∫0
∞∫−∞
|h(r,ω)|2 dr dω.
Posto se |r| nalazi u granicama izmedu 0 i ∞ u Parsevalovoj formuli zaRadonovu transformaciju, sledece ocene ne mogu biti korektne
‖Rf‖L2(R×S1) ≤M‖f‖L2(R2) ∨ ‖Rf‖L2(R×S1) ≥M1‖f‖L2(R2)
Centralna ,,slice” teorema i inverzna Furijeova transformacija za funkcijuf ∈ L1(Rn) nas dovode do inverzne Radonove transformacije.
Teorema 4.3.3 (Radonova inverzna formula). Neka je f apsolutnointegrabilna funkcija definisana na prirodnom domenu Radonove transfor-macije i neka je f apsolutno integrabilna. Tada je
f(x) =1
(2π)2
π∫0
∞∫−∞
eir〈x,ω〉Rf(r,ω)|r| dr dω (4.4)
Dokaz. Vazi da je
Rf(r,ω) = Rf(−r,−ω) (4.5)
37

jer je Rf parna funkcija. Funkcije f i f su apsolutno integrabilne, pa naosnovu inverzne Furijeove transformacije sledi
f(x) =1
(2π)2
∫R2
f(ξ)ei〈x,ξ〉 dξ
Koristeci inverznu Furijeovu formulu u polarnim koordinatama i centralnu,,slice” teoremu, dobijamo
f(x) =1
(2π)2
∫R2
f(ξ)ei〈x,ξ〉 dξ
=1
(2π)2
2π∫0
∞∫0
eir〈x,ω〉f(rω)r dr dω
=1
(2π)2
2π∫0
∞∫0
eir〈x,ω〉Rf(r,ω)r dr dω
Koristeci (4.5) dokaz teoreme je kompletan.
Na slici (4.4) levo je prikazan matematicki fantom kojeg su u medicini zapotrebe rekonstruisanja slike uveli Sep (Larry Shepp9) i Logan (Benjamin F.Logan10). Slika opisuje funkciju koja modelira koeficijent atenuacije ,,slice”-aljudske glave. Najveca atenuacija je predstavljena belom bojom (lobanja), anajmanja atenuacija crnom bojom (vazduh oko lobanje). Slika u sredini pred-stavlja primenu Radonove transformacije, tj. krivolinijski integral funkcijeprikazane na prvoj slici. Horizontalna koordinatna osa je ugaona promenljiva,θ, za koju je ω(θ) = (cos θ, sin θ), dok vertikalna koordinatna osa predstavljaafini parametar. Ugao θ se krece izmedu 0 i 2π. Kao i ranije, velika gustinaje prikazana belom bojom, a crnom bojom manja gustina. Poslednja, trecaslika prikazuje rekonstrukciju fantoma uz pomoc formule (4.4). Zapazamoda rekonstruisana slika je skoro pa istovetna sa originalnom, prvom slikom.
9americki matematicar10americki inzenjer
38

Slika 4.4: Graficki prikaz Radonove transformacije
4.3.1 Filtered Back-projection
Za pravac ω prava u familiji {`t,ω|t ∈ (−∞,∞)} koja prolazi kroz tackux je prava sa afinim parametrom t = 〈x,ω〉. Back-projection formula jeodredena na sledeci nacin
f(x) =1
2π
2π∫0
Rf(〈x,ω(θ)〉, θ) dθ.
Vrednost u x je polovina sredine Radonove transformacije funkcije f posvim pravama koje prolaze kroz x. Pomenuta back-projection formula nijeispravna, sto mozemo uociti kada je uporedimo sa inverznom Radonovomformulom (4.4). Ona ne daje zadovoljavajuce rezultate pri rekonstrukcijislike, sto se ogleda i na primeru rekonstrukcije crno bele slike. Iako je objekatprepoznatljiv, primenom back-projection formule, on je ipak mutan (slika4.5).
Slika 4.5: Primena back-projection formule
Koliko god pravaca budemo koristili pri rekonstrukciji slike, uvek cemodobijati kao rezultat nedovoljno jasnu sliku zbog suma i buke. Vidi sliku
39

(4.6). U inverznoj formuli Radonove transformacije (4.4), |r| ima ulogu danisko frekventne komponente potisne, dok su visoko frekventne komponentesa |r| pojacane. Otuda nam je jasna nekorektnost back-projection formule,kao i potreba za filtriranom back-projection formulom (filtered back-projectionformulom).
Slika 4.6: Back-projection formula primenjena na kvadratu u 5, 25, 100 i1000 pravaca
Tumacicemo Radonovu inverznu formulu kao proces koji se sastoji iz dvakoraka:1. Filter, koji se primenjuje na Radonovu transformaciju i deluje samo naafini parametar, je radijalni integral. Kao rezultat primene filtera dobija se
GRf(t,ω) =1
2π
∞∫−∞
Rf(r,ω)eirt|r| dr (4.6)
2. Ugaoni integral se opisuje kao back projection primenjen na filtriranuRadonovu transformaciju. Funkcija f je predstavljena na sledeci nacin
f(x) =1
2π
π∫0
(GR)f(〈x,ω)〉,ω) dω
Odavde lako zakljucujemo zasto inverznu Radonovu transformaciju cestonazivamo filtered back-projecton formula.
40

Drugi korak je jednostavan, dok prvi korak zahteva vise paznje. Izuzecemo|r|, pa ce funkcija f , kao rezultat primene jednodimenzionalne Furijeove
transformacije na Rf , imati oblik
f(x) =1
(2π)2
π∫0
∞∫−∞
eir〈x,ω〉f(rω) dr dω
=1
2π
π∫0
Rf(〈x,ω)〉,ω) dω
Ova formula je u stvari back-projection formula.
Na sledecoj slici uocavamo razliku izmedu back-projection formule, pri-menjene na slici levo, i filtrirane back-projection formule, primenjene na slicidesno, na primeru matematickog fantoma.
Slika 4.7: Razlika izmedu back-projection formule i filtrirane back-projectionformule
Podsetimo se da vazi ∂tg(ξ) = (iξ)g(ξ). Ako bi u inverznoj Radonovojformuli umesto |r| bilo r, tada bi vazilo
1
2πi
π∫0
∂tRf(〈x,ω〉,ω) dω,
41

sto predstavlja back-projection formulu izvoda Radonove transformacije po t.Ako je f realna funkcija, onda je ova funkcija cisto imaginarna. Diferenciranjeje lokalna operacija, pa nije tesko ovo razumeti. Da bismo videli razlikuizmedu r i |r|, uvescemo Hilbertovu transformaciju.
4.4 Hilbertova transformacija
Podsetimo, signum funkcija je definisanana sledeci nacin:
sgn(r) =
1 ; r > 0
0 ; r = 0
−1 ; r < 0
Definicija 4.4.1. Neka je funkcija g L2− funkcija definisana na R. Hilber-tova transformacija funkcije g je
Hg = F−1(sgn(g)).
Ako je g apsolutno integrabilna, tada je
Hg(t) =1
2π
∞∫−∞
g(r)sgn(r)eitr dr.
Zapazamo da Hilbertova transformacija funkcije g je funkcija cija je Fu-rijeova transformacija funkcija sgn(g).Hilbertova transformacija nije lokalna operacija, sto je slucaj sa diferenci-ranjem. Da bismo izracunali Hg(t0), gde je t0 data tacka, moramo znativrednost g(t) za svako t.
Primer 4.4.1. Neka je
f(x) =sinx
πx.
42

Furijeova transformacija funkcije f je
f(ξ) = χ[−1,1](ξ) =
{1 ; |ξ| ≤ 1
0 ; |ξ| > 1
Hilbertova transformacija funkcije f je
H(
sinx
πx
)=
1
2π
1∫0
eixξ dx−0∫
−1
eixξ dx
= i
1− cosx
πx
Navescemo neke aproksimacije Hilbertove transformacije.
Teorema 4.4.1. Neka je {φε} uniformno ogranicena familija lokalno inte-grabilnih funkcija koje tackasto kovergiraju ka sgn(ξ) kada ε → 0. Ako jefunkcija f kvadratno integrabilna, tada je njena Hilbertova transformacijadata limesom u srednjem (konvergencija po L2-normi)
Hf(t) = limε↓0F−1(φεf).
Ako je f dovoljno glatka, da f iscezava, tada Hf(t) mozemo predstavitina sledeci nacin
Hf(t) = limε↓0
1
2π
∞∫−∞
φε(ξ)f(ξ)eırξ dξ
Za ε > 0, mozemo definisati aproksimativnu Hilbertovu transformacijukao
Hεf = F−1(f hε) = f ∗ hε,gde je
hε =i
π
t
t2 + ε2
inverzna Furijeova transformacija funkcije hε, a hε je odredena sa
φε(ξ) = hε(ξ)def= sgn(ξ)e−ε|ξ|,
za svako ε > 0. Ovako odredena familija funkcija φε zadovoljava usloveprethodne teoreme.
43

Teorema 4.4.2. Neka funkcija f ima ogranicen nosac i neka za α > 0zadovoljava Helderov uslov sa konstantom α, tj.
|f(t)− f(s)||t− s|α
≤M.
Tada vazi
H(f) =i
πP.V.(f ∗ 1
s).
Posledica 4.4.1. Neka je f neprekidna funkcija koja zadovoljava Helderovuslov sa konstantom α i ima nosac u
[−R
2, R2
]. Tada je
Hf(t) =i
π
R∫−R
f(t− s)− f(t)
sds, za t ∈
[−R
2,R
2
].
4.5 Aproksimativni inverzi Radonove transfo-
rmacije
Racunanjem Hilbertove transformacije mozemo ispravno naci inverznuRadonovu transformaciju. Izmereni podaci su predstavljeni funkcijom gmna prostoru pravih. Inverzna Radonova transformacija zahteva da se nadu∂tgm, medutim, dobijeni podaci cesto nisu diferencijabilni. Ako funkcija gmima operator diferenciranja reda 1
2, ona ne predstavlja Radonovu transforma-
ciju L2− funkcije, sto znamo iz Parsevalove formule, pa je ovo razlog zastozelimo naci aproksimativnu inverznu Radonovu formulu. Imajmo u viduda je svaka aproksimacija Hilbertove transformacije vodi do aproksimacijeinverzne Radonove transformacije.
Na osnovu osobine konvolucije za parcijalne izvode vazi
∂x(f ∗ g) = ∂xf ∗ g = f ∗ ∂xg
44

Podsetimo se da je Hεf = F−1(f hε) = f ∗hε, pa je aproksimativna inverznaRadonova formula data sa
f(x) ≈ 1
2πi
π∫0
Hε(∂tRf)(〈x,ω〉),ω) dω
=1
2πi
π∫0
hε ∗ (∂tRf)(〈x,ω〉),ω) dω
Koristeci da je hε = iπ
tt2+ε2
i ∂tf ∗ g = f ∗ ∂tg, dalje sledi
f(x) ≈ 1
2πi
π∫0
∞∫−∞
Rf(s,ω)∂thε(〈x,ω〉 − s) ds
=1
2π2
π∫0
∞∫−∞
[Rf(s,ω)
ε2 − (t− s)2
(ε2 + (t− s)2)2ds |t=〈x,ω〉
]dω.
Neka je ψ(r) ogranicena, parna funkcija za koju vazi ψ(0) = 1 i ψ(r) = 0za |r| > W. Za l funkcija na R× S1 definise
Gψ(l)(t,ω) =1
2π
∞∫−∞
l(r,ω)eirt ˆψ(r)|r| dr
i
R−1ψ l(x) =1
2π
π∫0
Gψ(l)(〈x,ω〉,ω) dω.
Oznacimo fψ = R−1ψ ◦ Rf. Na osnovu teoreme (4.2.2), sledi
R(f ∗ g)(t,ω) =
∞∫−∞
Rf(t− τ,ω)Rg(τ,ω) dτ
Koristeci teoremu o konvoluciji za Furijeovu transformaciju, dobijamo
Rf ∗ g(r,ω) = Rf(r,ω)Rg(r,ω).
45

Pretpostavimo da je g radijalna funkcija takva da Rg ne zavisi od ω. Filtri-rana back-projection formula za f ∗ g daje
f ∗ g =1
4π2
π∫0
∞∫−∞
Rf(r,ω)Rg(r)eir〈x,ω〉|r| dr dω
Kada ovaj rezultat uporedimo sa definicijom funkcije fψ, zakljucujemo daukoliko mozemo naci radijalnu funkciju, kψ , definisanu na R2, da vazi
R(kψ)(t,ω) = ψ(t),
ondafψ(x) = kψ ∗ f(x)
Egzistencija funkcije kψ oblika kψ(ρ) = − 1π
∞∫ρ
ψ′(t)√t2−ρ2
je posledica naredne
teoreme
Teorema 4.5.1. Neka ψ, dva puta neprekidno diferencijabilna funkcija naR, zadovoljava sledece uslove:
• ψ(t) = ψ(−t)
• Postoji konstanta M da |ψ(t)| ≤M ∧ |ψ′(t)| ≤M
• ψ i ψ′ su apsolutno integrabilne
Tada postoji ogranicena, neprekidna funkcija g(x) = G(‖x‖) u prirodnomdomenu Radonove transformacije da je Rg = ψ.
Sada mozemo rezultat predstaviti teoremom.
Teorema 4.5.2. Neka je funkcija ψ ogranicena, parna funkcija za koju vaziψ(0) = 1 i ψ(r) = 0 za |r| > W. Neka je ψ apsolutno integrabilna funkcija.Tada je
fψ(x) = kψ ∗ f(x),
gde je kψ(ρ) = − 1π
∞∫ρ
ψ′(t)√t2−ρ2
.
46

Vratimo se na trenutak medicini. Kada funkciju f zamenimo funkcijomfψ, dobicemo zamuceniju sliku. Da bismo umanjili novonastalu zamucenost,
mozemo povecati nosac funkcije ψ, pri cemu ce funkcije ψ i kψ biti ostrijeizrazene. Ovaj postupak nas ipak dovodi do druge poteskoce-sum u slici cebiti intenzivniji.
4.6 Radonova transformacija podataka sa ogra-
nicenim nosacem
U medicini je paznja usmerena na podatke koji imaju ogranicen nosac,pa cemo pretpostaviti da je funkcija f jednaka nuli izvan diska poluprecnikaR. Tada je Rf(t,ω) = 0 za |t| > R. Za nenegativan ceo broj n vazi
Mn(f)(ω) =
∫R2
f(x)(〈x,ω〉)n dx (4.7)
Ukoliko f ima ogranicen nosac, onda su ovi integrali dobro definisani za bilokoje n ∈ N0. Za dovoljno veliko n ovi integrali mozda nemaju smisla ukolikovrednost funkcije f nije jednaka nuli van diska sa konacnim poluprecnikom.Stavivsi x = tω + sω , napisacemo ovaj integral u smislu Rf
Mn(f)(ω) =
∫R2
f(tω + sω)tn ds dt
=
∞∫−∞
Rf(t,ω)tn dt.
Funkcija Mn(f)(ω) se naziva n-ti moment Radonove transformacije funkcijef . Integral je dobro definisan ako je Rf jednaka nuli za |t| > R. Izrazicemoω kao funkciju od θ
ω(θ) = (cos θ, sin θ)
Koristeci binomnu teoremu, dobijamo
47

(x,ω(θ))n = (x cos θ + y sin θ)n
=n∑j=0
(n
j
)(x cos θ)j(y sin θ)n−j
=n∑j=0
(n
j
)cosj θ sinn−j θxjyn−j
Vratimo se sada (4.7). Dobicemo trigonometrijski polinom stepena n
Mn(f)(θ) =n∑j=0
(n
j
)cosj θ sinn−j θ
∫∫R2
f(x, y)xjyn−j dx dy
=n∑j=0
anj sinj θ cosn−j θ.
gde su
anj =
(n
j
)∫∫R2
f(x, y)xjyn−j dx dy
Ako funkcija ima ogranicen nosac, tada je Mn(f)(θ) trigonometrijski poli-nom stepena n.
Teorema 4.6.1. Neka funkcija f ima ogranicen nosac. Tada:
• Rf ima ogranicen nosac
• Za sve nenegativne cele brojeve n, postoje konstante {an0, an1 . . . ann}da
∞∫−∞
Rf(t,ω(θ))tn dt =n∑j=0
anj sinj θ cosn−j θ
Pitamo se: Da li postoji funkcija f definisana na domenu Radonove trans-formacije koja je jednaka nuli van diska poluprecnika R da je h = Rf , gdefunkcija h zadovoljava sledece :
48

• h(t,ω) ∈ R× S1
• h(t,ω) = h(−t,−ω)
• h(t,ω) = 0 za |t| > R.
• mn(h)(θ) =∞∫−∞
h(t,ω(θ))tn dt je trigonometrijski polinom stepena n,
gde je n nenegativan ceo broj.
• h(t,ω) je dovoljno glatka funkcija.
Helgason11 i Ludvig12 su dali potvrdan odgovor na postavljeno pitanje. AlenKormak je takode proucavao prethodno opisan problem.
4.7 Neprekidnost Radonove transformacije i
inverzne Radonove transformacije
Izmerene podatke u CT uredaju predstavljamo kao Radonovu transfor-maciju deo po deo neprekidne funkcije f sa ogranicenim nosacem. Problemnastaje jer svi izmereni podaci sadrze buku nastalu usled cak i malog pomer-aja pacijenta prilikom snimanja (bilo da je to unutrasnji pomeraj: disanje,kucanje srca, ... ili spoljasnji pomeraj), pa podaci mogu biti neverodosto-jni. U nameri da ovaj problem bude prevaziden, preslikavanje f 7−→ Rf bitrebalo biti neprekidno, jer u suprotnom promene koje se desavaju tokompregleda CT uredajem imaju veci uticaj na merenja koja se vrse. OsetljivostRf kvantifikuju procene neprekidnosti preslikavanja f 7−→ Rf na promenekoje se desavaju unutar CT uredaja tokom snimanja. Ukoliko se zapitamokoliko je rekonstrukcioni metod dobijanja slike osetljiv na greske, u stvarimi govorimo o svojstvima neprekidnosti inverzne Radonove transformacije.Procene neprekidnosti inverznog preslikavanja, h 7−→ R−1h, kvantifikuju
11islandski matematicar roden 1927. godine12nemacki matematicar, 1886-1982
49

uticaj gresaka koje su prisutne u izmerenim podacima na kvalitet rekon-strukcione slike. Procene za R−1 su veoma bitne u procesu rekonstruisanjaslike.
U medicini, Radonova transformacija predstavlja idealizaciju. Uopsteno,funkcija f je ogranicena, tj. f ≤M , i jednaka je nuli van diska poluprecnikaL i verovatno prekidna. Gruba procena Radonove transformacije funkcije fje
|Rf(t,ω)| =
∣∣∣∣∣∣∣∫lt,ω
f ds
∣∣∣∣∣∣∣ ≤ 2ML,
gde 2L predstavlja gornju granicu duzina preseka `t,ω sa nosacem funkcije f.Neka je
‖Rf(t,ω)‖1,∞ = maxω∈S1
∞∫−∞
|Rf(t,ω)| dt
i
‖f‖1 =
∫R2
|f(x)| dx
Podsetimo, funkcija za koju vazi ‖f‖1 < ∞ je apsolutno integrabilna iliL1 funkcija. Skup ovakvih funkcija oznacavamo sa L1(R2).
Teorema 4.7.1. Neka je funkcija f ∈ L1(R2) definisana na prirodnomdomenu Radonove transformacije. Tada je
‖Rf‖1,∞ ≤ ‖f‖1
Radonova transformacija je linearna, pa za funkcije f i g, koje su defin-isane na prirodnom domenu Radonove transformacije, vazi
‖Rf −Rg‖1,∞ ≤ ‖f − g‖1
Snimanje CT uredajem zahteva odredeno vreme, pa veoma lako mozedoci do toga da se pacijent pomeri. Neka je fτ , funkcija f translirana zavektor τ = (τ1, τ2), data sa
fτ (x, y) = f(x− τ1, y − τ2)
50

Ukoliko pacijent promeni svoj polozaj i veoma malo tokom snimanja, izmerenepodatke cemo bolje predstaviti {Rfτ(ω)(t,ω)}, gde {τ (ω)} predstavljajuvektore u R2 koji opisuju poziciju pacijenta kao funkcije od ω. Vazi
‖Rf −Rfτ‖1,∞ ≤ maxω∈S1‖f − fτ(ω)‖1
Ukoliko pomeraji pacijenta nisu veliki i funkcija f ne varira brzo, merenja{Rfτ(ω)(t,ω)} se ne razlikuju mnogo od {Rf(t,ω)}.
Funkcije sa ogranicenim nosacem dopustaju bolje L2 procene.
Teorema 4.7.2. Neka funkcija f ∈ L2(R2) iscezava van diska poluprecnikaL. Tada, za ∀ω vazi
∞∫−∞
|Rf(t,ω)|2 dt ≤ 2L‖f‖2L2
Dokaz. Funkcija f iscezava van diska poluprecnika L, pa je
Rf(t,ω) =
L∫−L
f(tω + sω) ds
Na osnovu Kosi-Svarcove nejednakosti dobijamo
∞∫−∞
|Rf(t,ω)|2 dt =
L∫−L
∣∣∣∣∣∣L∫
−L
f(tω + sω) ds
∣∣∣∣∣∣2
dt
≤ 2L
L∫−L
L∫−L
|f(tω + sω)|2 ds dt
Teorema nam pokazuje da ukoliko f iscezava van ogranicenog skupa, mine nadgledamo samo ukupne L2 normeRf , vec i L2 norme po svakom pravcuω posebno.
51

Teorema 4.7.3. Neka funkcija f ∈ L2(R2) iscezava van diska poluprecnikaL. Tada, za ∀ω vazi
∞∫−∞
|Rf(t,ω)|2√L2 − t2
dt ≤ 2‖f‖2L2
Dokaz. Posmatrajmo f(x, y) = χ[o,L2](x2 + y2)f(x, y)
Na osnovu Kosi Svarcove nejednakosti, ∀|t| ≤ L, vazi
|Rf(t,ω)|2 =
∣∣∣∣∣∣L∫
−L
f(tω + sω)χ[0,L2](s2 + t2) ds
∣∣∣∣∣∣2
≤ 2
L∫−L
|f(tω + sω)|2 ds
√L2−t2∫0
ds
= 2√L2 − t2
L∫−L
|f(tω + sω)|2 ds
Dalje sledi
∞∫−∞
|Rf(t,ω)|2√L2 − t2
dt ≤L∫
−L
2√L2 − t2√L2 − t2
L∫−L
|f(tω + sω)|2 ds dt = 2‖f‖2L2
4.8 n-dimenzionalna Radonova transformacija
Afine hiperravne u prostoru Rn predstavicemo na sledeci nacin
`t,ω = {x ∈ Rn; 〈x,ω〉 = t},
gde je t ∈ R i ω jedinicni vektor u Rn. Kao i ranije, i sada vazi da je
`t,ω = `−t,−ω.
52

Izbor vektora ω predstavlja orijentaciju u hiperravni.Posmatrajmo vektore {e1, e2, . . . , en−1} za koje vazi 〈ω, ej〉 = 0 i 〈ei, ej〉 =δij za i, j = 1, . . . , n− 1.〈ω, e1, . . . , en−1〉 je ortonomirana baza u Rn. Definisimo nove ortogonalnekoordinate, (t, s1, . . . , sn−1), na Rn na sledeci nacin
x = tω +n−1∑j=1
sjej .
Definicija 4.8.1. n-dimenzionalna Radonova formula je definisana na sledecinacin
Rf(t,ω) =
∫`t,ω
f dσn−1 =
∫Rn−1
f(tω +
∑sjej
)ds1 . . . dsn−1.
Kao i ranije, n− dimenzionalna Radonova transformacija je parna funkcija,tj. Rf(t,ω) = Rf(−t,−ω).
Teorema 4.8.1 (Centralna ,,slice” teorema). Ako je f apsolutno inte-grabilna funkcija na Rn, tada je
Rf(r,ω) =
∞∫−∞
Rf(t,ω)e−irt dt = f(rω).
Teorema 4.8.2 (Inverzna Radonova formula). Neka je f glatka funkcijasa ogranicenim nosacem u Rn. Tada je
f(x) =1
2(2π)n
∫Sn−1
∞∫−∞
Rf(r,ω)rn−1eir〈ω,x〉 dr dω. (4.8)
Ukoliko je dimenzija prostora neparna, tj. ako je n = 2k + 1, tada rintegral u (4.8) mozemo izracunati kao
1
2π
∞∫−∞
Rf(r,ω)rn−1eir〈ω,x〉 dr = (−1)k∂t2kRf(t, 〈ω,x〉),
53

pa uz (4.8) dobijamo
f(x) =(−1)k
2(2π)2k
∫Sn−1
(∂t2kRf)(〈ω,x〉,ω) dω.
Laplasov operator na Rn je definisan sa ∆Rnf =n∑j=1
∂2xjf. Za koordinate
(t, s1, . . . , sn−1), takode vazi i ∆Rnf = ∂2t f +n−1∑j=1
∂2sjf.
Sledeca teorema nam daje vezu izmedu R(∆Rnf) i Rf .
Teorema 4.8.3. Neka je funkcija f dva puta neprekidno diferencijabilnafunkcija sa ogranicenim nosacem na Rn. Tada vazi
R(∆Rnf) = ∂2tRf.
54

Literatura
[1] Charles L. Epstein, Introduction to the Mathematics of Medical imaging.University of Pennsylvania, Philadelphia, Pennsylvania, 2007.
[2] Marija Frkovic, Klaudija Viskovic, Radioloska oprema, Zagreb, 2011.
[3] Prof. dr Momcilo Babic, Medicinski leksikon, 1999.
[4] Rade R. Babic, Tesla o X-zracima, Vojnosanitetski pregled 63(11), 2006,979-982.
[5] Timothy F. Feeman, The Mathematics of Medical Imaging, Beginner’sGuide, Springer, 2010.
[6] Richard B. Gunderman, Osnovi radiologije, Klinicka slika •Patofiziologija • Imidzing, Data Status, Beograd, 2016.
[7] Joerg Wilhelm Oestmann, Christoph Wald, Janne Crossin, Osnoviklinicke radiologije, Od slike do dijagnoze, Data Status, Beograd, 2008.
[8] www.bib.irb.hr.
[9] https://digitalcommons.colby.edu
[10] https://www.wikipedia.org
[11] https://ivamilosevic5.wordpress.com
[12] https://my.clevelandclinic.org
[13] https://velikirecnik.com
[14] https://www.sk.rs
55

[15] http://www.desy.de
[16] https://www.opsteobrazovanje.in.rs
[17] https://fizikaokonas.wordpress.com
[18] https://www.fer.unizg.hr
56

Biografija
Svetlana Stankovic je rodena 17.06.1992. godine u Nisu. Osnovnu skolu,,Dobrosav Jovanovic Stanko” (danas ,,Stefan Nemanja”) u Nisu, kao i gim-naziju ,,Bora Stankovic”, prirodno-matematicki smer, u Nisu, zavrsila jeodlicnim uspehom. Osnovne studije, odsek matematika, na Prirodno-ma-tematickom fakultetu u Nisu upisala je 2011. godine i zavrsila 2015. godine.Iste godine upisuje master studije na smeru Matematicki modeli u fizici kojezavrsava 2019. godine.
57