Embed Size (px)
DESCRIPTION
1. Introducere. 1.1. Domeniul de studiu1.2. Scop și obiectiv1.3. Model neliniar pentru studiul vibrațiilor asupra sistemului locomotor2. Analiza biomecanică computerizată a mişcării2.1. Sistemele de achiziţie a mărimilor biomecanice2.2.Afişarea rezultatelor achiziţiilor computerizate de mărimi biomecanice2.3.Interpretarea rezultatelor achiziţiilor computerizate de mărimi biomecanice3.Virtualizarea modelelor numerice3.1 Introducere3.2 Dezvoltarea simulatoarelor virtuale în medii informatice integrate3.3 Propunere model virtualizat 5 grade de liberate realizat în Workingmodel3.4. Experimentare cu microcontroller ArduinoDirecţii viitoare de cercetare pentru experimentare
Citation preview
Determinări experimentale privind
comportarea aparatului locomotor uman sub
acțiunea vibrațiilor
(Raport de cercetare științifică nr.3 )
Doctorand: ing. Vlad Marius
Domeniul de doctorat: Inginerie Mecanică
Specializarea: Mecanică tehnică și vibrații
Conducător științific: Prof.univ.dr.ing. Cristian Pavel
Ministerul Educației Naționale
Universitatea Tehnică de Construcţii
Bucureşti
Școala Doctorală
1
-2015-
Cuprins: Capitolul 1. Introducere ........................................................................................ 2
1.1. Domeniul de studiu ..................................................................................... 2
1.2. Scop și obiectiv ........................................................................................... 2
1.3. Model neliniar pentru studiul vibrațiilor asupra sistemului locomotor ......... 5
2. Analiza biomecanică computerizată a mişcării .............................................. 21
2.1. Sistemele de achiziţie a mărimilor biomecanice ...................................... 21
2.2.Afişarea rezultatelor achiziţiilor computerizate de mărimi biomecanice .. 23
2.3.Interpretarea rezultatelor achiziţiilor computerizate de mărimi
biomecanice ..................................................................................................... 26
3.Virtualizarea modelelor numerice.................................................................... 28
3.1 Introducere ................................................................................................. 28
3.2 Dezvoltarea simulatoarelor virtuale în medii informatice integrate .......... 29
3.3 Propunere model virtualizat 5 grade de liberate realizat în Workingmodel
.......................................................................................................................... 31
3.4. Experimentare cu microcontroller Arduino .............................................. 32
Direcţii viitoare de cercetare pentru experimentare ............................................ 34
Bibliografie: ........................................................................................................ 35
2
Capitolul 1. Introducere
1.1. Domeniul de studiu
Înțelegerea relațiilor mecanice dintre cauză și efect, relații ce apar în
timpul mișcării organismelor vii, a preocupat omenirea încă din cele mai vechi
timpuri. Aristotel, Leonardo da Vinci, Borelli, Newton, iar mai aproape de noi,
din perspectiva spațio – temporală, prof. Rainer, au fost atrași, alături de atâția
alții, de studierea mecanismelor mișcării corpului omenesc.[8]
Apar modele biomecanice asociate organismului uman care au suferit
transformări succesive ce le-au sporit complexitatea și acuratețea explicării
fenomenelor și proceselor care se produc în corpul omenesc.
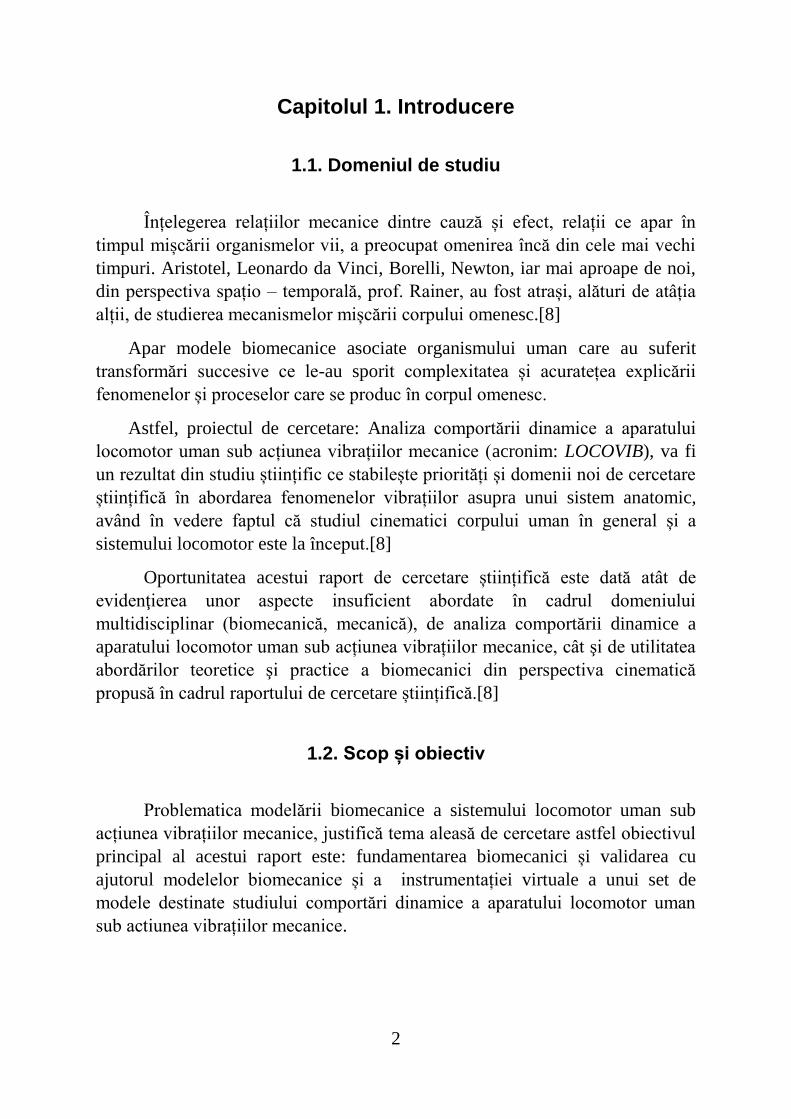
Astfel, proiectul de cercetare: Analiza comportării dinamice a aparatului
locomotor uman sub acțiunea vibrațiilor mecanice (acronim: LOCOVIB), va fi
un rezultat din studiu științific ce stabilește priorități și domenii noi de cercetare
științifică în abordarea fenomenelor vibrațiilor asupra unui sistem anatomic,
având în vedere faptul că studiul cinematici corpului uman în general și a
sistemului locomotor este la început.[8]
Oportunitatea acestui raport de cercetare științifică este dată atât de
evidenţierea unor aspecte insuficient abordate în cadrul domeniului
multidisciplinar (biomecanică, mecanică), de analiza comportării dinamice a
aparatului locomotor uman sub acțiunea vibrațiilor mecanice, cât şi de utilitatea
abordărilor teoretice şi practice a biomecanici din perspectiva cinematică
propusă în cadrul raportului de cercetare științifică.[8]
1.2. Scop și obiectiv
Problematica modelării biomecanice a sistemului locomotor uman sub
acțiunea vibrațiilor mecanice, justifică tema aleasă de cercetare astfel obiectivul
principal al acestui raport este: fundamentarea biomecanici și validarea cu
ajutorul modelelor biomecanice și a instrumentației virtuale a unui set de
modele destinate studiului comportări dinamice a aparatului locomotor uman
sub actiunea vibrațiilor mecanice.
3
Analiza mişcării este justificată de interesul pentru creşterea performanţei
motrice umane, în general, şi de îmbunătăţirea tehnicii sportive, în special. Un
alt interes al analizei mişcării este optimizarea refacerii, recuperării sau
ameliorării motricităţii umane în cazuri patologice congenitale, amputări,
paralizii, în urma traumatismelor accidentale, disfuncţii acute etc., având scop
de corecţie sau de stopare a involuţiei.
Subliniem faptul că analiza mişcării este doar o faza (adăugăm noi,
importanta şi necesară) a demersului de îmbunătăţire a performanţei sau de
ameliorare a deficienţelor de motricitate, fază ce vizează direct identificarea
unor difereţe sistematice. Alte faze, la care vom reveni, implică interpretarea,
raţionamentele cauzale, tactica şi strategia de implementare, corecţia dinamica
şi reevaluarea etc.
Considerăm util să zăbovim asupra noţiunii de diferenţă, proprie analizei,
indiferent dacă se referă la biomecanică sau la alte discipline sau ştiinţe.
Diferenţa incumbă doua aspecte, unul de constatare şi altul de interpretare. Cu
alte cuvinte, diferenţa poate fi remarcată (sesizată, observată, măsurată etc.) sau
nu, poate fi interpretată ca neglijabilă, nesemnificativă etc. sau poate fi
interpretată ca semnificativă, relevantă, importantă etc.
În practica cercetărilor ştiinţifice şi a biomecanicii, care, după cum se ştie,
sunt predominant aposteriorice, unele diferenţe nu sunt remarcate (sesizate,
observate etc.), fie din cauza instrumentarului ştiinţific neadecvat (ineficient,
insensibil etc.), fie din motive de metodă neadecvată (procedeu, concept,
tehnică) sau din motive datorate observatorului (cercetătorului, operatorului,
decidentului). Diferenţele remarcate pot fi, la rândul lor, semnificative
(relevante, importante) sau pot fi nesemnificative (neglijabile, fără importanţă
etc.).
În anumite circumstanţe, toate aceste tipuri de diferenţe devin nedorite
sau altfel anticipate, ca atare ele poartă numele de erori.
Diferenţele semnificative se împart în: sistematice (repetabile, iterate,
regulate etc.) şi nesistematice (întâmplătoare, accidentale, fără regulă aparentă
etc.).
Numai diferenţele sistematice pot fi interpretate cauzal sau corelativ. Se
va vedea în continuare că, în cazul diferenţelor cărora li se poate ataşa eticheta
de “sistematice” (cu un grad acceptabil de risc), se pot identifica factori
(cauzali) sau explicaţii (de paralelism, similitudine etc.) care aparţin euristicii.
4
Prin analogie, diferenţa logico-matematică este o formă de abstractizare a
unei diferenţe fizice (clase de echivalenţă), în care disocierea este o operaţie
concretă.
Revenind la analiza mişcării biomecanice, constatăm că aceasta poate fi
calitativă sau cantitativă, simplă sau complexă, on line sau off line etc.
Taxonomia acesteia nu este interesantă pentru teoria biomecanicii decât
în măsura în care se alege un compromis acceptabil între practicitatea şi
semnificaţia demersului de analiză. Analiza este, prin definiţie, un demers
practic de desfacere în părţi componente a unui întreg, demers prin care se obţin
informaţii semnifictive ce îmbogăţesc fondul de know-how. Analiza nu
inventează, ci descoperă, iar ulterior justifică sau critică, rămânând pe seama
altor metode raţionale de cunoaştere să valorifice concluziile ei. Se va vedea în
continuare că analiza şi sinteza, cu formele logice de deducţie, inducţie,
inferenţă etc. pot ridica rangul unei ipoteze confirmate la cel de teză.
În demersul de analiză, reperele faţă de care se consemnează diferenţele
sunt empirice, evolutive şi aposteriorice. De regulă, atunci când este vorba de
performanţă, se aleg drept repere tehnicile aşa-zis consacrate, care, iniţial, s-au
Aimpus ca stiluri. In fond, ele sunt combinaţii logice de mişcări, cu succesiuni
şi simultaneităţi precise. Când este vorba de ameliorarea mişcării, precum în
kinetoterapie, reperele sunt mişcări caracterizate statistic ca fiind normale şi
naturale.[8]
A fost dezvoltată o metodologie indirectă fără contact în scopul de
detectare dinamică, pentru aplicația în biomecanică: aparatul locomotor uman
sub acțiunea vibrațiilor mecanice. Astfel, în lipsa unui model complex
biomecanic se recurge la:
Identificarea și fundamentarea analitică a unor modele biomecanice
cu legături reologice menite să asigure analiza sistemului
locomotor uman sub acțiunea vibrațiilor mecanice;
Conceperea unor modele biomecanice versatile prin amplasarea
corespunzătoare pe diverse trasee de acțiune a unor elemente, astfel
încât răspunsul final al modelului să poată atingă precizia și gradul
de fidelitate parametrică;
Conceperea și realizarea unui sistem de analiză numerică și
instrumentală pentru evaluarea influenței vibrațiilor mecanice
asupra sistemului osteo-articular (gleznă – picior) folosind
instrumentație virtuală.
5
Contribuția teoretică, matematică care să fundamenteze soluțiile propuse,
metodele și algoritmii utilizați și soluțiile propuse, pentru atingerea problemei
propuse are în vedere:
Elaborarea unor noi modele și metode;
Conceperea unor sisteme moderne;
Adaptarea soluțiilor existente într-un domeniu de activitate la un proces
tehnologic sau sistem tehnic dintr-un alt domeniu de activitate.
Oamenii sunt mai sensibili la vibrațiile întregului corp sub excitație de
șoasă frecvență conform literaturii de specialitate, astfel se pot considera mai
multe porți de intrare a vibrațiilor mecanice în corpul uman (mâini, aparat
locomotor, cutie toracică, etc).[]
Ca urmare, biodinamica omului sub acțiunea vibrațiilor mecanice a fost
un subiect de interes de-a lungul anilor, și au fost stabilite o serie de modele
matematice. În timp ce multe cercetări au fost efectuate pe construirea de
modele biodinamice specifice, bazate pe anumite date experimentale în condiții
de testare precise, o investigație amănunțită a modelelor umane matematice a
aparatului locomotor sub acțiunea vibrațiilor din exterior nu a primit încă același
nivel de atenție.[8]
În această lucrare, a fost efectuat un studiu, analiza în continoarea
Raportului 2 din LOCOVIB, legat de modelarea sistemului locomotor uman
supus la vibrații atât analitic, virtualizat și cu direcții de experimentare, astfel
raportul de față are 3 capitole.
1.3. Model neliniar pentru studiul vibrațiilor asupra
sistemului locomotor Analiza comportării biomecanice a sistemului aparatului locomotor uman
sub acțiunea vibrațiilor necesită existența unor modele biomecanice cu un
anumit nivel de complexitate, stabilit, în general, în funcție de configurația
analizată, de disponibilitatea dateleor experimentale destinate estimării
parmametri proprii modelului, de cerințele finale.
Modelele reologice prezentate în rapoatele anterioare ale cercetării au
fiecare avantaje și desavantaje, fiind adoptate si adaptate corespunzător scopului
practic propus.
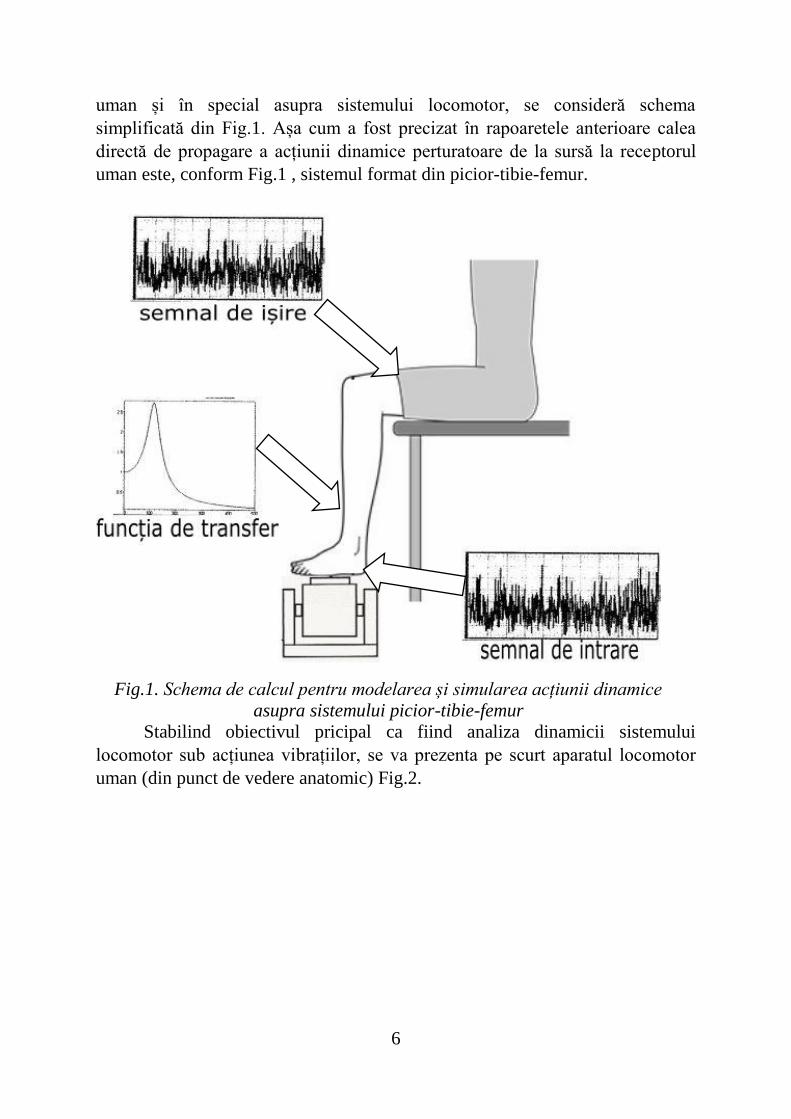
Pentru situațiile considerate în această lucrare, corespunzătoare acțiunii
vibrațiilor produse de diferite scule și echipamente tehnologice asupra corpului
6
uman și în special asupra sistemului locomotor, se consideră schema
simplificată din Fig.1. Așa cum a fost precizat în rapoaretele anterioare calea
directă de propagare a acțiunii dinamice perturatoare de la sursă la receptorul
uman este, conform Fig.1 , sistemul format din picior-tibie-femur.
Fig.1. Schema de calcul pentru modelarea și simularea acțiunii dinamice
asupra sistemului picior-tibie-femur Stabilind obiectivul pricipal ca fiind analiza dinamicii sistemului
locomotor sub acțiunea vibrațiilor, se va prezenta pe scurt aparatul locomotor
uman (din punct de vedere anatomic) Fig.2.
7
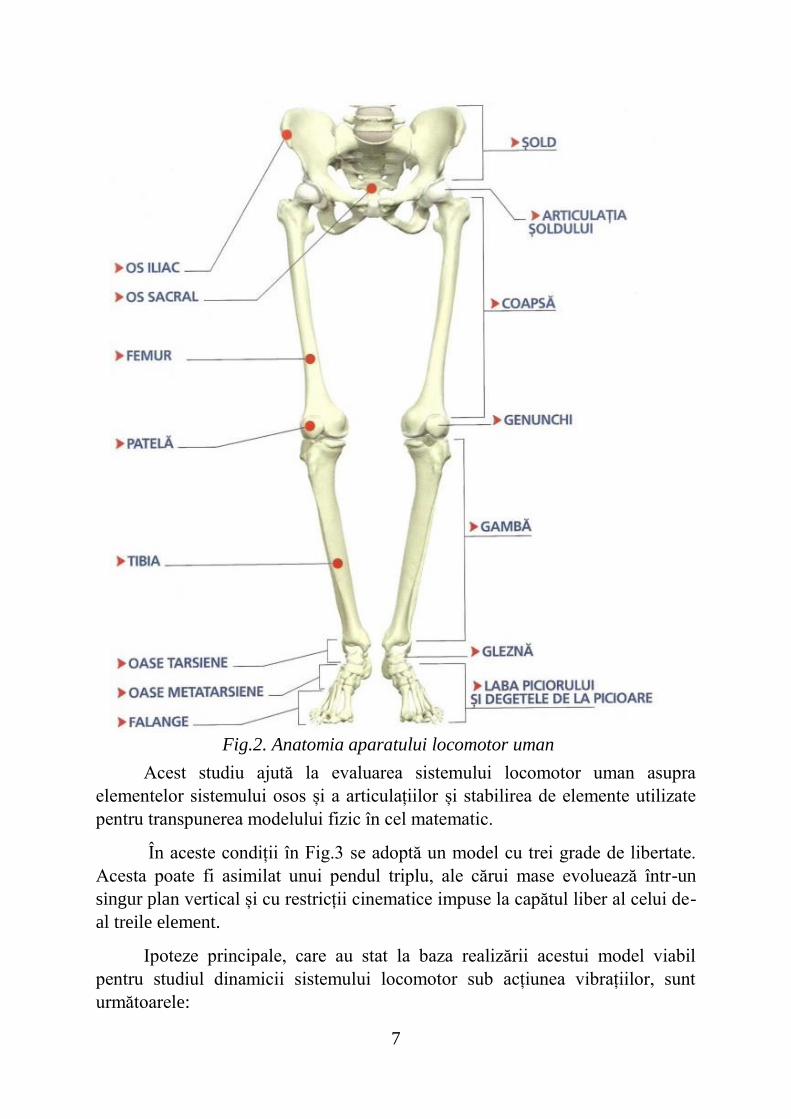
Fig.2. Anatomia aparatului locomotor uman
Acest studiu ajută la evaluarea sistemului locomotor uman asupra
elementelor sistemului osos și a articulațiilor și stabilirea de elemente utilizate
pentru transpunerea modelului fizic în cel matematic.
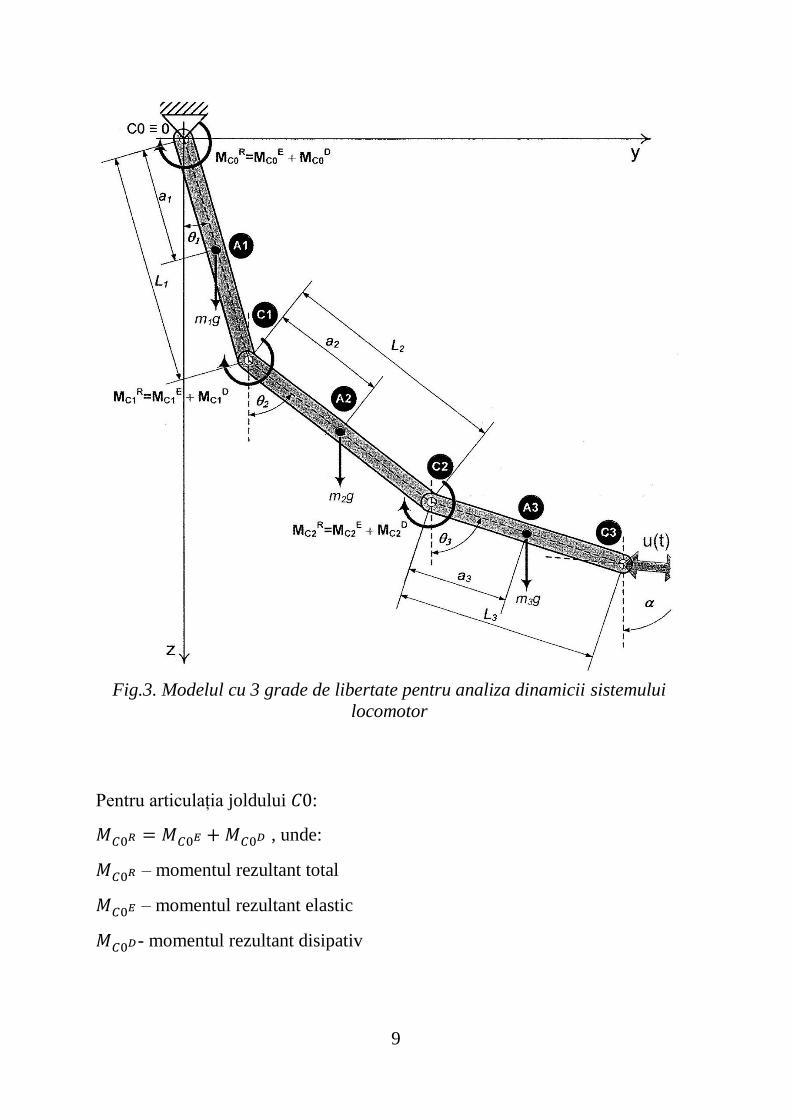
În aceste condiții în Fig.3 se adoptă un model cu trei grade de libertate.
Acesta poate fi asimilat unui pendul triplu, ale cărui mase evoluează într-un
singur plan vertical și cu restricții cinematice impuse la capătul liber al celui de-
al treile element.
Ipoteze principale, care au stat la baza realizării acestui model viabil
pentru studiul dinamicii sistemului locomotor sub acțiunea vibrațiilor, sunt
următoarele:
8
mișcarea este studiată în plan vertical;
legătura între cele trei elemente ale modelului este realiztă prin
intermediul unor articulații cilindrice;
în fiecare articulație acționează un moment rezistent de tip elastic și
vâscos, ambele având caracteristica liniară într-o primă aproximare;
nu au fost luate în considerare forțele de tip frecare uscată din articulații,
deoarece aportul acestora în disiparea energiei totale a sistemului este
relativ redusă coparativ cu cel al forțelor de frecare vâscoasă;
restricționarea mișcării de pendul triplu la capătul liber este justificată de
tipul de acțiune al perturbației externe sistemului;
piciorul a fost modelat printr-un solid rigid deoarece s-a considerat că în
timpul lucrului acesta nu efectuează decât o mișcare globală impusă de
sursa perturbatoare, fără a căpăta mișcări suplimentare ale părților
componente;
deducerea ecuațiilor diferențiale de mișcare a fost realizată în ipoteza
deplasărilor unghiulare mari, astfel încât nu au fost eliminate din modelul
matematic funcțiile trigonometrice.
9
Fig.3. Modelul cu 3 grade de libertate pentru analiza dinamicii sistemului
locomotor
Pentru articulația joldului 𝐶0:
𝑀𝐶0𝑅 = 𝑀𝐶0𝐸 +𝑀𝐶0𝐷 , unde:
𝑀𝐶0𝑅 – momentul rezultant total
𝑀𝐶0𝐸 – momentul rezultant elastic
𝑀𝐶0𝐷- momentul rezultant disipativ

10
Pentru articuația genuchiului 𝐶1:
𝑀𝐶1𝑅 = 𝑀𝐶1𝐸 +𝑀𝐶1𝐷 , unde:
𝑀𝐶1𝑅 – momentul rezultant total
𝑀𝐶1𝐸 – momentul rezultant elastic
𝑀𝐶1𝐷- momentul rezultant disipativ
Pentru articulația gleznei 𝐶2:
𝑀𝐶1𝑅 = 𝑀𝐶0𝐸 +𝑀𝐶0𝐷 , unde:
𝑀𝐶1𝑅 – momentul rezultant total
𝑀𝐶1𝐸 – momentul rezultant elastic
𝑀𝐶1𝐷- momentul rezultant disipativ
Pentru stabilirea sistemului de ecuații diferențiale de mișcare
corespunzător modelui prezentat în Fig.3 au fost utilizate ecuațiile lui Lagrange
de speța a II-a, scrise sub forma:
𝑑
𝑑𝑡(𝜕𝐸
𝜕�̇�𝑖) −
𝜕𝐸
𝜕𝑞𝑖=𝜕𝑈
𝜕𝑞𝑖+𝜕𝐷
𝜕�̇�𝑖
(1)
în care 𝐸 este energia cinetică totală a sistemului, 𝑈 energia potențială, 𝐷
disiparea, iar 𝑞𝑖 sunt coordonatele generalizate ce definesc complet mișcarea
sistemului considerat.
În cazul acestui model, cele trei coordonate generalizate sunt unghiurile
din fiecare articulație (𝜃1, 𝜃2, 𝜃3), dintre axa longitudinală a elementului și axa
verticală 𝑂𝑧.
Energia cinetică a ansamblului din Fig.3 este dată de expresia:
𝐸 =1
2𝐽1,𝐶𝑂𝜃1
2 +1
2𝐽2,𝐴2𝜃2
2 +1
2𝐽3,𝐴3𝜃3
2 +1
2𝑚2𝑉𝐴2
2 +1
2𝑚3𝑉𝐴3
2 (2)
în care 𝐽𝑖,𝑝 sunt momentele de inerție ale fiecărui element 𝑖, evaluate în punctul
𝑝 (pentru prima masă față de punctul de articulație, iar pentru celelalte două față
de centrul propriu de greutate al fiecăreia); 𝑚𝑖 sunt masele elementelor; 𝑉𝑖 sunt
vitezele centrelor de greutate.
Pentru evaluarea vitezelor 𝑉𝐴2 și 𝑉𝐴3, au fost determinate coordonatele
celor două centre de greutate 𝐴2, respectiv 𝐴3.
Coordonatele punctului 𝐴2 (C.G. al masei 𝑚2) sunt:

11
{𝑧𝐴2 = 𝐿1 cos(𝜃1) + 𝑎2 cos(𝜃2)
𝑦𝐴2 = 𝐿1 sin(𝜃1) + 𝑎2 sin(𝜃2)
(3)
iar coordonatele punctului 𝐴3 (C.G. al masei 𝑚3) sunt:
{𝑧𝐴3 = 𝐿1 cos(𝜃1) + 𝐿2 cos(𝜃2) + 𝑎3cos(𝜃3)
𝑦𝐴3 = 𝐿1 sin(𝜃1) + 𝐿2 sin(𝜃2) + 𝑎3sin(𝜃3)
(4)
Coordonatele punctului 𝐶3, în care sunt aplicate restricțiile cinematice, sunt:
{𝑧𝐶3 = 𝑧𝐶30 + 𝑢 cos (𝛼)𝑦𝐶3 = 𝑦𝐶30 + 𝑢 sin (𝛼)
(5)
unde:
{𝑧𝐶30 = 𝐿1 cos(𝑜𝜃1) + 𝐿2 cos(𝑜𝜃2) + 𝐿3 cos(𝑜𝜃3)
𝑦𝐶30 = 𝐿1 sin(𝑜𝜃1) + 𝐿2 sin(𝑜𝜃2) + 𝐿3 sin(𝑜𝜃3)
(6)
reprezintă coordonatele inițiale ale punctului 𝐶3 (fixe în lipsa oricărei acțiuni
exterioare în acest punct) și:
𝑢 = 𝑢(𝑡) = 𝑢0sin (𝜔𝑡) (7)
În relațiile (5), (6) și (7), mărimile au următoarele semnificații:
(0𝜃1, 0𝜃2 , 0𝜃3) – sunt valorile inițiale ale celor trei coordonate unghiulare;
(𝐿1𝐿2𝐿3) – sunt lungimile celor trei elemente componente ale modelului;
𝑢(𝑡) – funcția de excitație cinematică a modelului;
𝜔 – este viteza unghiulară a perturbației externe de tip cinematic;
𝑢0 – este amplitudinea mișcării perturbatoare externe.
Ținând cont de expresiile (3) și (4) se pot determina vitezele liniare ale
maselor 𝑚2 și 𝑚3. Astfel, pentru 𝑚2 rezultă:
{�̇�𝐴2 = −𝐿1�̇�1 sin(𝜃1) − 𝑎2�̇�2sin (𝜃2)
𝑦𝐴2 = 𝐿1�̇�1 cos(𝜃1) + 𝑎2�̇�2cos (𝜃2)
(8)
de unde:
{�̇�𝐴22 = 𝐿1
2�̇�12𝑠𝑖𝑛2(𝜃1) + 𝑎2
2�̇�22𝑠𝑖𝑛2(𝜃2) + 2𝐿1𝑎2�̇�1�̇�2sin (𝜃1)sin (𝜃2)
�̇�𝐴22 = 𝐿1
2�̇�12𝑐𝑜𝑠2(𝜃1) + 𝑎2
2�̇�22𝑐𝑜𝑠2(𝜃2) + 2𝐿1𝑎2�̇�1�̇�2cos (𝜃1)cos (𝜃2)
(9)
iar, în final, pătratul vitezei 𝑉𝐴2 este:
𝑉𝐴22 = �̇�𝐴2
2 + �̇�𝐴22 = 𝐿1
2�̇�12 + 𝑎2
2�̇�22 + 2𝐿1𝑎2�̇�1�̇�2cos (𝜃2 − 𝜃1) (10)
Analog, pentru 𝑚3 rezultă:

12
{�̇�𝐴3 = −𝐿1�̇�1 sin(𝜃1) − 𝐿2�̇�2 sin(𝜃2) − 𝑎3�̇�3sin (𝜃3)
𝑦𝐴3 = 𝐿1�̇�1 cos(𝜃1) + 𝐿2�̇�2 cos(𝜃2) + 𝑎3�̇�3cos (𝜃3)
(11)
de unde:
{
�̇�𝐴32 = 𝐿1
2�̇�12𝑠𝑖𝑛2(𝜃1) + 𝐿2
2 �̇�22𝑠𝑖𝑛2(𝜃2) + 𝑎3
2�̇�32𝑠𝑖𝑛2(𝜃3)
+2𝐿1𝐿2�̇�1�̇�2 sin(𝜃1) sin(𝜃2) + 2𝐿1𝑎3�̇�1�̇�3 sin(𝜃1) sin(𝜃3)
+2𝐿2𝑎3�̇�2�̇�3 sin(𝜃2) sin(𝜃3)
�̇�𝐴32 = 𝐿1
2�̇�12𝑐𝑜𝑠2(𝜃1) + 𝐿2
2 �̇�22𝑐𝑜𝑠2(𝜃2) + 𝑎3
2�̇�32𝑠𝑖𝑛2(𝜃3)
+2𝐿1𝐿2�̇�1�̇�2 cos(𝜃1) cos(𝜃2) + 2𝐿1𝑎3�̇�1�̇�3 cos(𝜃1) cos(𝜃3)
+2𝐿2𝑎3�̇�2�̇�3 cos(𝜃2) cos(𝜃3)
(12)
și pătratul vitezei 𝑉𝐴3 este:
𝑉𝐴32 = �̇�𝐴3
2 + �̇�𝐴32
= 𝐿12 �̇�1
2 + 𝐿22 �̇�2
2 + 𝑎32�̇�3
2 ++2𝐿1𝐿2�̇�1�̇�2 cos(𝜃2 − 𝜃1)
+ 2𝐿1𝑎3�̇�1�̇�3 cos(𝜃1 − 𝜃3) + 2𝐿2𝑎3�̇�2�̇�3 cos(𝜃3 − 𝜃2)
(13)
În ceea ce privește mișcarea suplimentară a masei 𝑚3 datorită restricției
cinematice aplicată în articulația 𝐶3, se determină în continoare viteza
adițională a C.G. (punctul 𝐴3) al acestei mase. Astfel, coordonatele punctului
𝐴3, exprimate în funcție de coordonatele articluației 𝐶3 sunt:
{𝑢𝑧𝐴3 = 𝑧𝐶3 − (𝐿3 − 𝑎3)cos (𝜃3)
𝑢𝑦𝐴3 = 𝑦𝐶3 − (𝐿3 − 𝑎3)sin (𝜃3)
(14)
Prin apicarea operatorului de derivare în funcție de variabila timp rezultă:
{𝑢�̇�𝐴32 = �̇� cos(𝛼) + (𝐿3 − 𝑎3)�̇�3sin (𝜃3)
𝑢�̇�𝐴32 = �̇� sin(𝛼) − (𝐿3 − 𝑎3)�̇�3cos (𝜃3)
(15)
respectiv:
{
𝑢�̇�𝐴32 = �̇�2𝑐𝑜𝑠2(𝛼) + (𝐿3 − 𝑎3)
2�̇�32𝑠𝑖𝑛2(𝜃3)
+2�̇�(𝐿3 − 𝑎3)�̇�3cos (𝛼)sin (𝜃3)
𝑢�̇�𝐴32 = �̇�2𝑠𝑖𝑛2(𝛼) + (𝐿3 − 𝑎3)2�̇�3
2𝑐𝑜𝑠2(𝜃3)
−2�̇�(𝐿3 − 𝑎3)�̇�3sin(𝛼)cos (𝜃3)
(16)
și, în final:
𝑢𝑉𝐴32 = 𝑢�̇�𝐴32 + 𝑢�̇�𝐴32
= �̇�2 + (𝐿3 − 𝑎3)2�̇�3
2 − 2�̇�(𝐿3 − 𝑎3)�̇�3sin (𝛼 − 𝜃3)
(17)
În aceste condiții energia cinetică a întregului sistem devine:

13
𝐸 =1
2𝐽1,𝐶0�̇�1
2 +1
2𝐽2,𝐴2�̇�2
2 +1
2𝐽3,𝐴3�̇�3
2
+1
2𝑚2[𝐿1
2�̇�12 + 𝑎2
2 + 2𝐿1𝑎2�̇�1�̇�2 cos(𝜃2 − 𝜃1)]
+1
2𝑚3[𝐿1
2�̇�12 + 𝐿2
2 �̇�22 + 𝑎3
2�̇�32 + 2𝐿1𝐿2�̇�1�̇�2 cos(𝜃2 − 𝜃1)
+ 2𝐿1𝑎3�̇�1�̇�3 cos(𝜃1 − 𝜃3) + 2𝐿2𝑎3�̇�2�̇�3 cos(𝜃3 − 𝜃2) + �̇�2
+ (𝐿3 − 𝑎3)2�̇�3
2 − 2�̇�(𝐿3 − 𝑎3)�̇�3sin (𝛼 − 𝜃3)]
(18)
Aplicând operatorii diferențiali asupra expresiei energiei (18), ținând cont
de fiecare coordonată generalizată și grupând termenii după variabila
independentă, rezultă:
𝜕𝐸
𝜕𝜃1= (𝑚2𝐿1𝑎2 +𝑚3𝐿1𝐿2)�̇�1�̇�2 sin(𝜃2 − 𝜃1)
− (𝑚3𝐿1𝑎3)�̇�1�̇�3sin (𝜃1 − 𝜃3)
(19)
𝜕𝐸
𝜕𝜃2= −(𝑚2𝐿1𝑎2 +𝑚3𝐿1𝐿2)�̇�1�̇�2 sin(𝜃2 − 𝜃1)
+ (𝑚3𝐿1𝑎3)�̇�1�̇�3sin (𝜃3 − 𝜃2)
(20)
𝜕𝐸
𝜕𝜃3= (𝑚3𝐿1𝑎3)�̇�1�̇�3 sin(𝜃1 − 𝜃3) − (𝑚3𝐿2𝑎3)�̇�2�̇�3 sin(𝜃3 − 𝜃2)
+ 𝑚3�̇�(𝐿3 − 𝑎3)�̇�3cos (𝛼 − 𝜃3)
(21)
În ceea ce privește derivarea în funcție de viteza de variație a fiecărei
coordonate independente, rezultă:
𝜕𝐸
𝜕�̇�1= 𝐽1,𝐶0�̇�1 +𝑚2[𝐿1
2�̇�1 + 𝐿1𝑎2�̇�2 cos(𝜃2 − 𝜃1)]
+ 𝑚3[𝐿12�̇�1
+ 𝐿1𝐿2�̇�2 cos(𝜃2 − 𝜃1) + 𝐿1𝑎3�̇�3cos (𝜃1 − 𝜃3)]
(22)
𝜕𝐸
𝜕�̇�2= 𝐽2,𝐴2�̇�2 +𝑚2[𝑎2
2�̇�2 + 𝐿1𝑎2�̇�1 cos(𝜃2 − 𝜃1)]
+ 𝑚3[𝐿22 �̇�2
+ 𝐿1𝐿2�̇�1 cos(𝜃2 − 𝜃1) + 𝐿2𝑎3�̇�3cos (𝜃3 − 𝜃2)]
(23)
𝜕𝐸
𝜕�̇�3= 𝐽3,𝐴3�̇�3
+𝑚3[𝑎32�̇�3 + 𝐿1𝑎3�̇�1 cos(𝜃1 − 𝜃3) + (𝐿3 − 𝑎3)
2�̇�3− �̇�(𝐿3 − 𝑎3)sin (𝛼 − 𝜃3)]
(24)

14
iar după aplicarea operatorului (d/dt) asupra expresiilor (22)-(24) rezultă:
𝑑
𝑑𝑡(𝜕𝐸
𝜕�̇�1) = (𝐽1,𝐶0 +𝑚2𝐿1
2 +𝑚3𝐿12)�̈�1
+ (𝑚2𝐿1𝑎2 +𝑚3𝐿1𝐿2)�̈�2 cos(𝜃2 − 𝜃1)
+ (𝑚3𝐿1𝑎3)�̈�3 cos(𝜃1 − 𝜃3)
− (𝑚2𝐿1𝑎2 +𝑚3𝐿1𝐿2)�̇�2(�̇�2 − �̇�1) sin(𝜃2 − 𝜃1)
− (𝑚3𝐿1𝑎3)�̇�3(�̇�1 − �̇�3)sin (𝜃1 − 𝜃3) (25)
𝑑
𝑑𝑡(𝜕𝐸
𝜕�̇�2) = (𝐽2,𝐴2 +𝑚2𝑎2
2 +𝑚3𝐿22)�̈�2
+ (𝑚2𝐿1𝑎2 +𝑚3𝐿1𝐿2)�̈�2 cos(𝜃2 − 𝜃1)
+ (𝑚3𝐿2𝑎3)�̈�3 cos(𝜃3 − 𝜃2)
− (𝑚2𝐿1𝑎2 +𝑚3𝐿1𝐿2)�̇�1(�̇�2 − �̇�1) sin(𝜃2 − 𝜃1)
− (𝑚3𝐿2𝑎3)�̇�3(�̇�3 − �̇�2)sin (𝜃3 − 𝜃2) (26)
𝑑
𝑑𝑡(𝜕𝐸
𝜕�̇�3) = (𝐽3,𝐴3 +𝑚3𝑎3
2 +𝑚3(𝐿3 − 𝑎3)2)�̈�3 + (𝑚3𝐿1𝑎3)�̈�2 cos(𝜃2 − 𝜃1)
+ (𝑚3𝐿2𝑎3)�̈�1 cos(𝜃1 − 𝜃3) + (𝑚3𝐿2𝑎3)�̈�2 cos(𝜃3 − 𝜃2)
− (𝑚3𝐿1𝑎3)�̇�1(�̇�1 − �̇�3) sin(𝜃1 − 𝜃3)
− (𝑚3𝐿2𝑎3)�̇�2(�̇�3 − �̇�2) sin(𝜃3 − 𝜃2)
− 𝑚3�̈�(𝐿3 − 𝑎3) sin(𝛼 − 𝜃3) + 𝑚3�̇�(𝐿3 − 𝑎3)�̇�3cos (𝛼 − 𝜃3) (27)
Se consideră că energia înmagazinată de elementele elastice din
articulațiile 𝐶0, 𝐶1, 𝐶2 este inclusă în funcția de potențial 𝑈. În aceste condiții,
energia potențială a modelului prezentat în Fig.3 este dată de expresia:
𝑈 = 𝑚1𝑔𝑎1 cos(𝜃1) + 𝑚2𝑔[𝐿1 cos(𝜃1) + 𝑎2cos (𝜃2)]
+ 𝑚3𝑔[𝐿1 cos(𝜃2) + 𝑎3cos (𝜃3)] +1
2𝑘1𝜃1
2
+1
2𝑘2(𝜃2 − 𝜃1)
2 +1
2𝑘3(𝜃3 − 𝜃2)
2
(28)
Disiparea în sistemul din Fig.3 este dată de funcția:
𝐷 =1
2𝑐1�̇�1
2 +1
2𝑐2(�̇�2 − �̇�1)
2+1
2𝑐3(�̇�3 − �̇�2)
2
(29)
Aplicând celor două expresii operatorul de derivare în raport cu cele trei
coordonate independente – pentru energia potențială, respectiv în raport cu
viteza de variație a coordonatelor independente – pentru energia disipată,
rezultă:

15
𝜕𝑈
𝜕𝜃1= −(𝑚1𝑎1 +𝑚2𝐿1 +𝑚3𝐿1)𝑔𝑠𝑖𝑛(𝜃1) + (𝑘1 + 𝑘2)𝜃1 − 𝑘2𝜃2
(30)
𝜕𝑈
𝜕𝜃2= −(𝑚2𝑎2 +𝑚3𝐿2)𝑔𝑠𝑖𝑛(𝜃2) − 𝑘2𝜃1 + (𝑘2 + 𝑘3)𝜃2 − 𝑘3𝜃3
(31)
𝜕𝑈
𝜕𝜃3= −𝑚3𝑔𝑎3 sin(𝜃3) − 𝑘3𝜃2 + 𝑘3𝜃3
(32)
respectiv:
𝜕𝐷
𝜕𝜃1̇= (𝑐1 + 𝑐2)�̇�1 − 𝑐2�̇�2
(33)
𝜕𝐷
𝜕𝜃2̇= −𝑐2�̇�1 + (𝑐2 + 𝑐3)�̇�2 − 𝑐3�̇�3
(34)
𝜕𝐷
𝜕𝜃3̇= −𝑐3�̇�2 + 𝑐3�̇�3
(35)
Ținând cont de expresiile (19-36) și folosind ecuațiile lui Lagrange în
formularea (1), se poate asamba forma finală a sistemuluyi de ecuații
diferențiale corespunzător modelului din Fig.3. Datorită structurii funcțiilor
energetice și considerând cele trei coordonate generalizate (𝜃1, 𝜃2, 𝜃3), precum
și derivatele lor, rezultă un sistem de trei ecuații diferențiale neliniare, astfel:
{
(𝐽1,𝐶0 +𝑚2𝐿1
2 +𝑚3𝐿12)�̈�1 + (𝑚2𝐿1𝑎2 +𝑚3𝐿1𝐿2)�̈�2 cos(𝜃2 − 𝜃1) +
+(𝑚3𝐿1𝑎3)�̈�3𝑐𝑜𝑠(𝜃1 − 𝜃3) − (𝑚2𝐿1𝑎2 +𝑚3𝐿1𝐿2)�̇�22𝑠𝑖𝑛(𝜃2 − 𝜃1) +
+(𝑚3𝐿1𝑎3)�̇�32𝑠𝑖𝑛(𝜃1 − 𝜃3) =
= −(𝑚1𝑎1 +𝑚2𝐿1 +𝑚3𝐿1)𝑔𝑠𝑖𝑛(𝜃1) + (𝑘1 + 𝑘2)𝜃1 − 𝑘2𝜃2 +
+(𝑐1 + 𝑐2)�̇�1 − 𝑐2�̇�2
(𝐽2,𝐴2 +𝑚2𝑎22 +𝑚3𝐿2
2)�̈�2 + (𝑚2𝐿1𝑎2 +𝑚3𝐿1𝐿2)�̈�2 cos(𝜃2 − 𝜃1) +
+(𝑚3𝐿2𝑎3)�̈�3𝑐𝑜𝑠(𝜃3 − 𝜃2) + (𝑚2𝐿1𝑎2 +𝑚3𝐿1𝐿2)�̇�22𝑠𝑖𝑛(𝜃2 − 𝜃1) −
−(𝑚3𝐿2𝑎3)�̇�32𝑠𝑖𝑛(𝜃3 − 𝜃2) =
= −(𝑚2𝑎2 +𝑚3𝐿2)𝑔𝑠𝑖𝑛(𝜃2) − 𝑘2𝜃1 + (𝑘2 + 𝑘3)𝜃2 − 𝑘3𝜃3 −
−(𝑐2 + 𝑐3)�̇�2 − 𝑐3�̇�3
(𝐽3,𝐴3 +𝑚3𝑎32 +𝑚3(𝐿3 − 𝑎3)
2)�̈�3 + (𝑚3𝐿1𝑎3)�̈�1 cos(𝜃1 − 𝜃3) +
+(𝑚3𝐿2𝑎3)�̈�2𝑐𝑜𝑠(𝜃3 − 𝜃2) − (𝑚3𝐿1𝑎3)�̇�22𝑠𝑖𝑛(𝜃3 − 𝜃2) −
−𝑚3�̈�(𝐿3 − 𝑎3)𝑠𝑖𝑛(𝛼 − 𝜃3) =
= −(𝑚3𝑎3)𝑔𝑠𝑖𝑛(𝜃3) − 𝑘3𝜃2 + 𝑘3𝜃3 − 𝑐3�̇�2 + 𝑐3�̇�3

16
(36)
Pentru a facilita manipularea și studiul acestor ecuații se va transpune
sistemul de ecuații (37) în formulare matricială. Astfel acesta devine:
[𝐽𝑐𝑜𝑠][�̈�] + [𝐽𝑠𝑖𝑛][�̇�2] + [𝐾][𝜃] + [𝐶][�̇�] + [𝑆]𝑔[sin ([𝜃])] = [𝐸𝑥]�̈� (37)
în care s-a ținut cont de următoarele notații:
- matricea principală de inerție:
[𝐽𝑐𝑜𝑠] =
[
(𝐽1,𝐶0 +𝑚2𝐿12 +𝑚3𝐿1
2) (𝑚2𝐿1𝑎2 +𝑚3𝐿1𝐿2) cos(𝜃2 − 𝜃1) (𝑚3𝐿1𝑎3) cos(𝜃1 − 𝜃3)
(𝑚2𝐿1𝑎2 +𝑚3𝐿1𝐿2) cos(𝜃2 − 𝜃1) (𝐽2,𝐴2 +𝑚2𝑎22 +𝑚3𝐿2
2) (𝑚3𝐿2𝑎3)𝑐𝑜𝑠(𝜃3 − 𝜃2)
(𝑚3𝐿1𝑎3) cos(𝜃1 − 𝜃3) (𝑚3𝐿2𝑎3)𝑐𝑜𝑠(𝜃3 − 𝜃2) (𝐽3,𝐴3 +𝑚3𝑎32 +𝑚3(𝐿3 − 𝑎3)
2)
]
- matricea adițional de inerție:
[𝐽𝑠𝑖𝑛] =
[
0 −(𝑚2𝐿1𝑎2 +𝑚3𝐿1𝐿2)𝑠𝑖𝑛(𝜃2 − 𝜃1) (𝑚3𝐿1𝑎3)𝑠𝑖𝑛(𝜃1 − 𝜃3)
(𝑚2𝐿1𝑎2 +𝑚3𝐿1𝐿2)𝑠𝑖𝑛(𝜃2 − 𝜃1) 0 −(𝑚3𝐿1𝑎3)𝑠𝑖𝑛(𝜃3 − 𝜃2)
−(𝑚3𝐿1𝑎3)𝑠𝑖𝑛(𝜃1 − 𝜃3) (𝑚3𝐿2𝑎3)𝑠𝑖𝑛(𝜃3 − 𝜃2) 0
]
- matricea de rigiditate:
[𝐾] = [
−(𝑘1 + 𝑘2) 𝑘2 0
𝑘2 −(𝑘2 + 𝑘3) 𝑘30 𝑘3 −𝑘3
]
- matricea coeficienților de disipare vâscoasă:
[𝐶] = [
−(𝑐1 + 𝑐2) 𝑐2 0
𝑐2 −(𝑐2 + 𝑐3) 𝑐30 𝑐3 −𝑐3
]
- matricea de influență:
[𝑆] = [
(𝑚1𝑎1 +𝑚2𝐿1 +𝑚3𝐿1) 0 0
0 (𝑚2𝑎2 +𝑚3𝐿2) 00 0 𝑚3𝑎3
]
- vectorul de excitație:
[𝐸𝑥]𝑇 = [0 0 𝑚3(𝐿1 − 𝑎3)sin (𝛼 − 𝜃3)]
- vectorul coordonatelor independente:
[𝜃]𝑇 = [𝜃1 𝜃2 𝜃3]

17
- vectorul vitezelor unghiulare:
[�̇�]𝑇= [
𝑑
𝑑𝑡𝜃1
𝑑
𝑑𝑡𝜃2
𝑑
𝑑𝑡𝜃3]
Dacă se definește o matrice de forma:
[∆𝜃] = (𝜃𝑖 − 𝜃𝑗) = [
(𝜃1 − 𝜃1) (𝜃1 − 𝜃2) (𝜃1 − 𝜃3)
(𝜃2 − 𝜃1) (𝜃2 − 𝜃2) (𝜃2 − 𝜃3)
(𝜃3 − 𝜃1) (𝜃3 − 𝜃2) (𝜃3 − 𝜃3)]
𝑖 = 1,2,3 / 𝑗 = 1,2,3
(38)
și se consideră matricea de inerție a sistemului având următoarea formă:
[𝐽] = [
(𝐽1,𝐶0
+ 𝑚2𝐿12 + 𝑚3𝐿1
2) (𝑚2𝐿1𝑎2 + 𝑚3𝐿1𝐿2) (𝑚3𝐿1𝑎3)
(𝑚2𝐿1𝑎2 + 𝑚3𝐿1𝐿2) (𝐽2,𝐴2
+ 𝑚2𝑎22 + 𝑚3𝐿2
2) (𝑚3𝐿2𝑎3)
(𝑚3𝐿1𝑎3) (𝑚3𝐿2𝑎3) (𝐽3,𝐴3
+ 𝑚3𝑎32 + 𝑚3(𝐿3 − 𝑎3)
2)
]
(39)
rezultă că cele două componente ale matricei de inerție, cea principală și cea
adițională, pot fi scrise astfel:
[𝐽𝑐𝑜𝑠] = [𝐽][cos ([∆𝜃])] (40)
[𝐽𝑠𝑖𝑛] = [𝐽][sin ([∆𝜃])] (41)
În aceste condiții ecuația matriceală (38) a sistemului devine:
[𝐽][cos ([∆𝜃])][�̈�] + [𝐽][sin ([∆𝜃])][�̇�2] + [𝑘][𝜃] + [𝐶][�̇�]
+ [𝑆]𝑔[𝑠𝑖𝑛([𝜃])] = [𝐸𝑥]�̈�
(42)
Dacă în formularea (43) se grupeză în partea stângă a ecuației termenii
corespunzători coordonatelor independente, a vitezelor acestora și a
accelerațiilor, se pun în evidență componentele neliniare ce influențează
comportarea dinamică a sistemului considerat. Astfel:
[𝐽][cos ([∆𝜃])][�̈�] + [𝑘][𝜃] + [𝐶][�̇�]
= −[𝑆]𝑔[𝑠𝑖𝑛([𝜃])] − [𝐽][sin([∆𝜃])][�̇�2] + [𝐸𝑥]�̈�
(43)
Această formulare rată că deși în partea stângă a ecuației au rămas
termenii aparent specifici unei formulări liniare, existența termenului
[cos ([∆𝜃])] face ca sistemul să capete o evoluție neliniară chiar în condițiile
unor valori constante ale caracteristicilor de material (rigiditate, disipare).
Astfel, pulsațiile proprii sistemului vor fi afectate de condițiile efective de lucru
(poziția inițială a sistemului și pozițiile instantanee relative ale fiecărei
componente în raport cu celelalte).
Ținând cont de complexitatea sistemului de ecuații și de neliniarității
prezentate în formularea acestora, rezolvarea sistemului (37) s-a realizat cu
18
ajutorul metodei numerice de rezolvare a sistemelor de ecuații diferențiale de tip
Runger-Kutta de ordin superior, implementată în cadrul unor aplicații dezvoltate
în programul de calcul Matlab®. (Gekeler,2008)(Karris,2008), (Marghitu,
2009), (Wilson, ș.a.2003) [4],[5],[1].
Dacă într-o anumită configurație funcțională cele trei brațe ale modelului
au aceeași direcție (sau foarte apropiată) ceea ce implică valori aproximativ
egale ale unghiurilor, rezultă că matricea diferențelor unghiulare (34) devine
nulă, ceea ce implică transformarea ecuației (44) în:
[𝐽][1][�̈�] + [𝑘][𝜃] + [𝐶][�̇�]
= −[𝑆]𝑔[𝑠𝑖𝑛([𝜃])] − [𝐽][0][�̇�2] + [𝐸𝑥]�̈�
(43’)
în care [1] și [0] sunt matricile unitate, respectiv nulă. În aceste condiții ecuația
matriceală a sistemului este:
[𝐽][�̈�] + [𝑘][𝜃] + [𝐶][�̇�] = −[𝑆]𝑔[𝑠𝑖𝑛([𝜃])] + [𝐸𝑥]�̈� (43’’)
ceea ce înseamnă că sistemul se va comporta ca un sistem liniar supus unei
perturbații externe formată dintr-o excitație cinematică [𝐸𝑥]�̈� și o forță
suplimentară ce ține seama de configurația geometrică a modelului și pozițiile
instantanee ale celor trei componente. Din ultima expresie (43’’) se observă că
pentru evoluții ale sistemului apropiate direcției orizontale (astfel cele trei
coordonate unghiulare capăta valori în jurul lui 𝜋 2⁄ ) această forță suplimentară
poate fi considerată constantă și astfel întregul model poate fi asimilat unui
model liniar. Considerațiile expuse în acest paragraf nu restrânge caracterul
neliniar general al modelului propus și nu limitează aria de utilizare a acestuia în
cazul analizei dinamice a sistemului locomotor.
Utilizarea acestui model acoperă două direcții, în funcție de tipul
echipamentului și procesului tehnologic ca sursă de excitație externă.
Astfel:
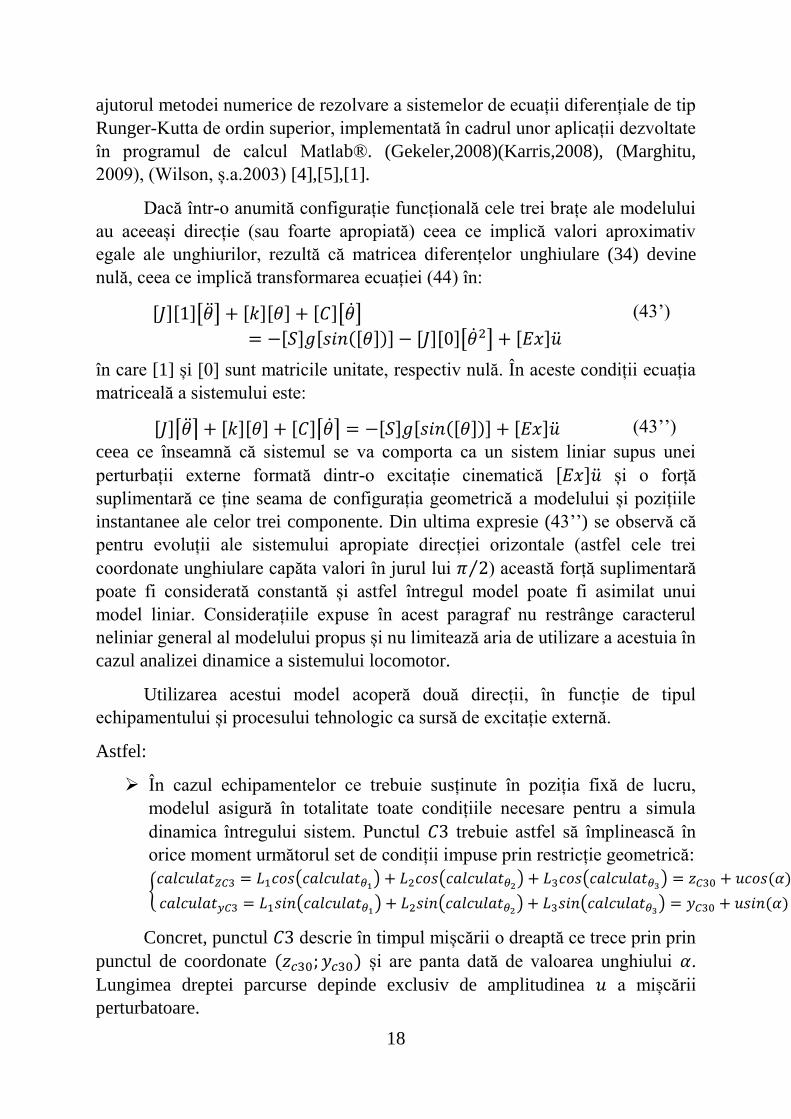
În cazul echipamentelor ce trebuie susținute în poziția fixă de lucru,
modelul asigură în totalitate toate condițiile necesare pentru a simula
dinamica întregului sistem. Punctul 𝐶3 trebuie astfel să împlinească în
orice moment următorul set de condiții impuse prin restricție geometrică:
{𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑡𝑍𝐶3 = 𝐿1𝑐𝑜𝑠(𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑡𝜃1) + 𝐿2𝑐𝑜𝑠(𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑡𝜃2) + 𝐿3𝑐𝑜𝑠(𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑡𝜃3) = 𝑧𝐶30 + 𝑢𝑐𝑜𝑠(𝛼)
𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑡𝑦𝐶3 = 𝐿1𝑠𝑖𝑛(𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑡𝜃1) + 𝐿2𝑠𝑖𝑛(𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑡𝜃2) + 𝐿3𝑠𝑖𝑛(𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑡𝜃3) = 𝑦𝐶30 + 𝑢𝑠𝑖𝑛(𝛼)
Concret, punctul 𝐶3 descrie în timpul mișcării o dreaptă ce trece prin prin
punctul de coordonate (𝑧𝑐30; 𝑦𝑐30) și are panta dată de valoarea unghiului 𝛼.
Lungimea dreptei parcurse depinde exclusiv de amplitudinea 𝑢 a mișcării
perturbatoare.
19
În cazul echipamentelor care solicită din partea operatorului uman doar
coordonate pe o anumită direcție este posibil ca unghiul 𝛼 de aplicare a
excitației cinematice să varieze în timp. În această situație restricțiile
impuse modelului, referitoare la punctul 𝐶3, se schimbă corespunzător,
acest punct parcurgând în timpul mișcării curbe în planul (yOz) ce se
înscriu într-o arie finită (mișcarea fiind stabilă). Poziționarea și mărimea
acestei arii de acoperire va depinde de valorile parametrilor de rigitate și
de amortizare din fiecare articulație a modelului, precum și de
amplitudinea maximă a mișcării de excitație și de domeniul de variație al
unghiului de aplicare al acestei excitații. Dacă în primul caz și în lipsa
oricărei perturbații externe, punctul 𝐶3 nu își schimbă poziția, în acest al
doilea caz, de asemenea în lipsa excitației, acest punct 𝐶3 acoperă o arie
a cărei poziție și mărime sunt funcții de rigiditatea și amortizarea
sistemului.
Sistemul de ecuații de mișcare corespunzător modelului a fost dedus în
ipoteza unghiului 𝛼 constant; cel de-al doilea caz prezentat anterior va fi
analizat cu ajutorul instrumentației virtuale. Acest caz are ca scop de a arăta
utilitatea identificării unui model general, care o dată fundamentat analitic
pentru o anumită situație de lucru, poate fi ușor adaptat unei alte situații
principial echivalente, doar prin reconsiderarea setului de condiții inițiale și de
restricții impuse.
Trebuie menționat de asemenea că pentru rezolvarea modelului, în oricare
dintre cazurile menționate anterior, trebuie să se țină cont de deformațiile
unghiulare inițiale, astfel încât momentul rezistent în cele trei articulații
𝐶0, 𝐶1, 𝐶2 să asigure o evoluție corectă a modelului, conform cu rezultatele
înregistrate pe cale experimentală pe model real.
Astfel, în cazul în care unghiul de aplicare a excitaţiei este constant, în
momentul iniţial este necesar ca indiferent de valorile unghiurilor, momentele
rezistente generate de componentele elastice să fie nule (cele generate de
componentele vâscoase sunt oricum nule pentru că vitezele unghiulare în
condiţii iniţiale sunt nule). Aceasta cerinţă suplimentară se rezolvă prin
aplicarea în expresiile finale ale momentelor rezistente de tip elastic a unor
deplasări unghiulare egale şi de semn contrar cu valorile unghiurilor inţiale.
Pentru cel de-al doilea caz prezentat, când unghiul de aplicare al
perturbaţiei externe este variabil în timp, aceste momente rezistente din
articulaţiile 𝐶0, 𝐶1, 𝐶2 trebuie să asigure poziţionarea întregului ansamblu în
configuraţia inţiala stabilită, iar valorile acestora rezultă din condiţiile de
echilibru static aplicate întregului ansamblu, împreună cu restricţia
20
corespunzătoare punctului 𝐶3 în momentul iniţial. Neidentificarea iniţială a
valorilor corecte pentru cele trei momente rezistente din articulaţiile 𝐶0. . 𝐶2
conduce inevitabil la evoluţii ulterioare incorecte ale modelului datorită faptului
că menţinerea pe traiectoria impusă a punctului C3 este compromisă şi acest
fapt are implicaţii directe asupra dinamicii întregului ansamblu.
Evaluarea momentului rezistent iniţial dat de componentele elastice are o
foarte mare importanţă în cazul în care se analizează dinamica sistemului propus
pentru o perturbaţie externă de tip dinamic (forţa externă aplicată în punctul
𝐶3). în această situaţie, punctul 𝐶3 capătă o evoluţie liberă în timp, neavând nici
un fel de restricţie cinematică sau geometrică impusă. Astfel, singura
componentă care restrânge aria de mişcare a punctului 𝐶3 este rezultanta
momentelor rezistente din articulaţiile sistemului.
Analiza comportării şi validarea modelului propus va fi realizată pe baza
unui simulator virtual dezvoltat în pachetul aplicaţii Matlab®R2007b, utilizând
modulul de instrumentaţie şi prototipare virtuală SimMechanics® din
componenţa acestui pachet.
21
2. Analiza biomecanică computerizată a mişcării
Este un fapt binecunoscut că, în ultimele două decenii ale secolului XX,
tehnologia computerizată a avansat extrem de mult; aşa se face că analiza
biomecanică a devenit o problemă de rutină, a cărei performanţă este
dependentă numai de calitatea hardware-sofware şi, implicit, de costurile
acestora.
Se ştie că softurile de analiză şi sinteză biomecanică se diferenţiază în
funcţie de aplicaţiile cerute de beneficiari. Acestea, de regulă, privesc cercetările
de biomecanică ale execuţiilor tehnice din sportul de performanţă, biomecanică
teoretică, inginerie biomecanică, kinetoterapie, reabilitate medicală, ortopedie şi
dizabilităţi motrice.
Primele procesări computerizate de biomecanică erau, după cum se ştie,
online, adică se bazau pe date prelucrate grafo-analitic direct de pe kinograme
sau cu analizatoare de filme proiectate pe ecran gradat. Se mai foloseau şi
sisteme hibride analog-digitale de goniometrie, având ca regulă introducerea
manuală a datelor în fişiere reaccesabile.
În actuala fază de tehnologizare computerizată, când există procesoare de
mare viteză, cu memorii de dimensiuni şi rate de achiziţie inimaginabile acum
20- 30 de ani, analiza biomecanică a evoluat extraordinar, permiţând afişarea
aproape instantanee a variaţiilor în timp şi spaţiu a poziţiilor, a distanţelor, a
vitezelor momentale, chiar şi a acceleraţiilor şi forţelor, desigur cunoscându-se,
în acest ultim caz, masele implicate în mişcare.[5]
Beneficiul analizei şi sintezei computerizate a mişcărilor biomecanice nu
este numai unul de promptitudine, ci şi unul de fidelitate. în schimb,
interpretarea a rămas un apanaj al operatorului sau decidentului, cu toate
încercările de standardizare a informaţiilor. Computerul nu poate încă, şi
probabil nu va putea niciodată, să interpreteze automat mişcările biomecanice,
întrucât criteriile de optimizare nu sunt întotdeauna de natură biomecanică; ele
sunt şi de natură umană, prin reguli şi convenţii.[2]
2.1. Sistemele de achiziţie a mărimilor biomecanice
Computerele stochează, procesează şi afişează ceea ce sistemul de
achiziţie converteşte în mărimi digitale şi transferă eşantionat. De regulă,
sistemele de achiziţie sunt dispozitive externe sau periferice ale computerelor,
având forma unor plăci de achiziţie, convertoare analog-digitale sau
microcontrolere. Prin urmare, tehnicile computerizate de analiză biomecanică se
22
referă la procesarea datelor digitale sau analogice achiziţionate şi stocate în
computere.
Toate aceste tehnici depind însă de modalităţile de conversie a mărimilor
mecanice în semnale electrice, adică de traductori. De exemplu, dacă unghiurile
dintre segmentele corporale sunt măsurate cu goniometre galvanice montate pe
articulaţie, atunci semnalele electrice convertite în date numerice secvenţiale şi
stocate în fişiere sunt direct proporţionale cu unghiurile măsurate.
În cazul când unghiul este evidenţiat cu markeri luminoşi sau de altă
natură, montaţi pe segmentele corporale adiacente şi în articulaţie, atunci
tehnica de procesare va folosi calcule analitice de triangulaţie până la afişarea
mărimii unghiulare. Vrem să spunem că o variabilă importantă a tehnicilor
computerizate de analiză biomecanică este clasa traductorilor.
Nu este vorba de tipologia traductorilor, cum ar fi de pildă cei galvanici,
inductivi sau capacitivi, de prezenţă, de proximitate etc., ci este vorba de relaţia
cu mărimea mecanică; în acest caz ne referim la traductorii proporţionali, de
variaţie (diferenţiali) şi la cei de integralitate (de diferite ordine). De exemplu,
accelerometrele măsoară derivata a doua a schimbărilor de poziţie, pe când
markerii de poziţie pot sesiza traiectoria, cu forma sa cea mai simplă, distanţa,
fără a face în mod direct referire la timp.
Timpul este relevat de rata de achiziţie sau de clock-ul intern al
computerului, în cazul cel mai frecvent de analiză biomecanică, acela de
achiziţie de imagini ale mişcărilor segmentale sau ale corpului unui sportiv, ale
unui accesoriu sau obiect, însăşi frecvenţa cadrelor reprezintă referirea la timpul
fizic, ceea ce rezolvă relaţia spaţiului cu timpul. Succesiunea de poziţii defineşte
traiectoria, iar din frecvenţa cadrelor (frame) sau a tactului de achiziţie se
determină timpul.
Prin procesare, cum ar fi integrarea curbilinie, se determină analitic
spaţiul, iar din segvenţele spaţiale se pot determina vitezele momentale,
acceleraţiile momentale şi alţi parametri ai mişcării biomecanice.
Partea de achiziţie a imaginilor şi de procesare a traiectoriilor în raport cu
secvenţele (sau cadrele) poartă de numirea de analiză 2D (două dimensiuni) sau
3D (trei dimensiuni) a mişcărilor biomecanice (a tehnicilor de execuţie
sportivă). Când filmarea sau captura video se face cu un singur aparat, adică
într-un plan cu două dimensiuni, analiza este 2D, iar când se filmează sau se
captează imaginea video cu două aparate, montate astfel încât mişcarea să fie
sesizată spaţial în trei dimensiuni, atunci analiza este 3D.
23
Markerii pot fi luminoşi, fluorescenţi, de contrast etc.; mai nou însă,
softurile performante pot recunoaşte automat, din succesiunea de framuri,
variaţia unui punct ales randomizat. Recunoaşterea se face prin simpla
comparaţie de proximitate a culorilor, a strălucirii sau a contrastului. Astfel, în
mod spectaculos, traiectoria unui punct este extrasă din contextul suprafeţei în
mişcare şi poate fi analizată şi interpretată separat faţă de imagine.[2]
2.2.Afişarea rezultatelor achiziţiilor computerizate de mărimi
biomecanice
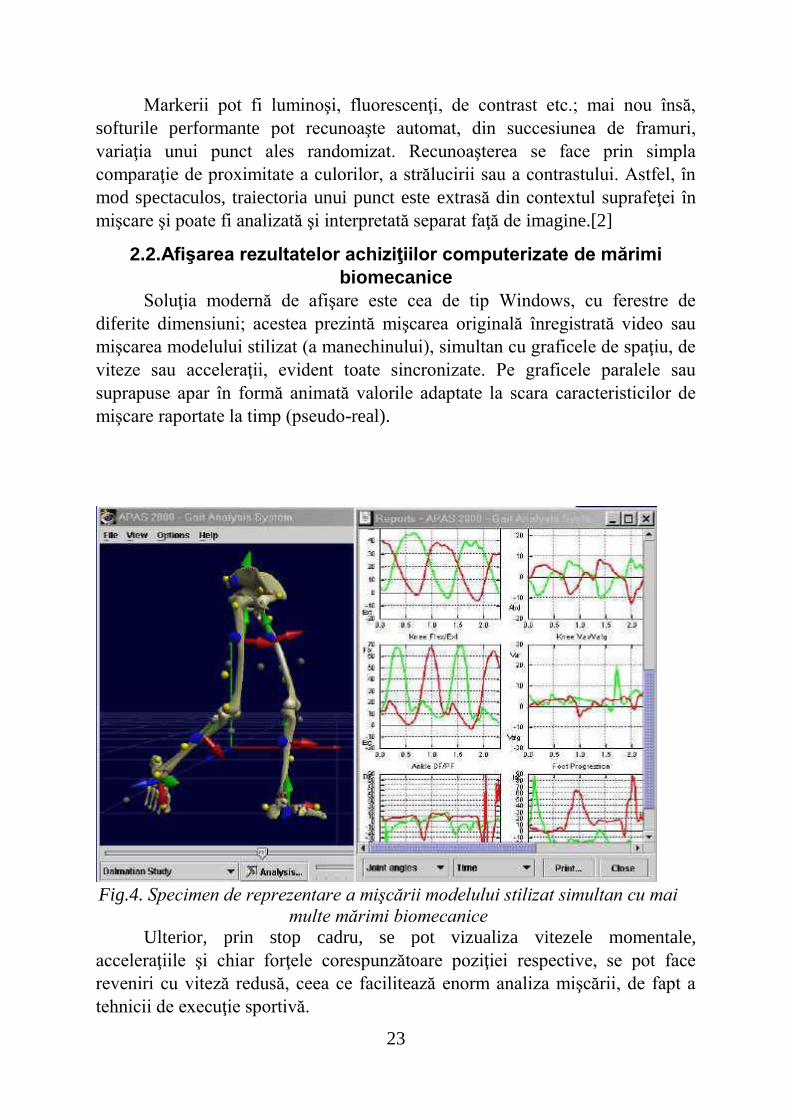
Soluţia modernă de afişare este cea de tip Windows, cu ferestre de
diferite dimensiuni; acestea prezintă mişcarea originală înregistrată video sau
mişcarea modelului stilizat (a manechinului), simultan cu graficele de spaţiu, de
viteze sau acceleraţii, evident toate sincronizate. Pe graficele paralele sau
suprapuse apar în formă animată valorile adaptate la scara caracteristicilor de
mişcare raportate la timp (pseudo-real).
Fig.4. Specimen de reprezentare a mişcării modelului stilizat simultan cu mai
multe mărimi biomecanice Ulterior, prin stop cadru, se pot vizualiza vitezele momentale,
acceleraţiile şi chiar forţele corespunzătoare poziţiei respective, se pot face
reveniri cu viteză redusă, ceea ce facilitează enorm analiza mişcării, de fapt a
tehnicii de execuţie sportivă.

24
Uneori este utilă reprezentarea în coordonate polare a mişcării, ca de
pildă a variaţiilor unghiulare dintre segmentele corporale sau în aşa-numitul
plan al fazelor (spaţiu şi viteze), atunci când mişcarea este ciclică.
Ergometrele, mai ales cele utilizate pentru canotaj, expun, în funcţie de
poziţie, lucrul mecanic sau variaţia de putere. În cazul ergometrelor de
antrenament, de body building sau de recuperare după traumatisme, efortul este
afişat atât ca debit de energie (putere), cât şi odometric (în formă cumulativă),
iar prezentarea grafică încearcă să fie cât mai sugestivă, prin culori sau bare.
Parametrii biomecanici ai mişcării şi efortului se pot afişa simultan cu EMG, ca
indicator on—off al intervalului de contracţie a unor muşchi, sau cu alţi
indicatori fiziologici, precum frecvenţa cardiacă, tensiunea arterială, frecvenţa
respiratorie etc. Procesarea computerizată simultană a acestor mărimi permite
introducerea on line a unor limite de avertizare, a unor semnale sonore sau
vizuale de alertă pentru cazul depăşirii unor valori din ecartul prestabilit. Astfel,
se poate declanşa un semnal de alertă, dacă frecvenţa cardiacă a crescut peste o
anumită limită, sau dacă puterea a scăzut sau a depăşit limita critică, aşa cum se
întâmplă în cazul exerciţiilor de recuperare după traumatisme etc.
În afişarea propriu-zisă a rezultatelor achiziţiilor de mărimi biomecanice
nu exista standarde, deoarece acestea sunt cel mai adesea probleme de estetică.
Totuşi, se ţine cont că, practic, nu pot fi urmărite vizual mai mult de 5-6 variaţii
simultane şi că procesarea mărimilor înseamnă un decalaj în timp (faţă de
înregistrarea video), care, dacă este mai mare de 120 ms, deranjează percepţia
vizuală.
Alegerea rezoluţiei, în special a numărului de cadre pe secundă în
înregistrările video, depinde de scop. Astfel, pentru a vizualiza creşterea unei
plante este nevoie de un cadru la câteva ore, sau pentru a vizualiza impactul
unui glonte sunt necesare câteva mii de cadre pe secundă, în timp ce în cazul
mişcărilor atletice sunt suficiente 30 sau 60 de cadre pe secundă. Chiar şi 24 de
cadre pe secundă sunt percepute de majoritatea observatorilor ca o mişcare
continuă, datorită remanenţei imaginii pe retină, apreciată prin frecvenţa de
fuziune a impulsurilor luminoase (SLI). Din datele noastre experimentale
rezultă că sunt rare cazurile când persoanele adulte au o frecvenţă critică de
fuziune mai mare de 30 Hz, astfel că acestea percep înregistrarea video cu 30 de
cadre pe secundă ca pe o mişcare sacadată, discontinuă.
Când se folosesc platforme de presiune pentru a înregistra distribuţia
forţelor pe o suprafaţă, afişarea acestora poate fi de tip topografic, asemănătoare
curbelor şi suprafeţelor de nivel marcate cu diferite culori. Uneori este
convenabil ca distribuţia presiunilor să fie reprezentată ca o grupare de vectori,

25
a căror magnitudine este proporţională cu presiunea şi care sunt orientaţi după
direcţia forţelor reactive.
Fig.5. Specimen de înregistrare a presiunii piciorului pe latformă
tensiometrică simultan cu afișarea unor mărimi biomecanice
Pare curios faptul că acest tip de reprezentare s-a perfecţionat datorită
sponsorizărilor făcute de marile corporaţii de confecţionat încălţăminte. De fapt,
beneficiarii acestor cercetări de presiune pe suprafaţa tălpii au dorit, din motive
comerciale, să perfecţioneze încălţămintea sportivă şi s-o diversifice pe ramuri
de sport.
Indiferent de modul de reprezentare, fiecare valoare grafică este la
început o cifră dintr-o matrice stocată în fişiere speciale. Lungimea mesajului,
de fapt măsura în biţi a informaţiei, determină rezoluţia grafică. Afişarea grafică
a rezultatelor are întotdeauna o rezoluţie optimă în funcţie de scop. In
biomecanica aplicată la tehnicile de execuţie sportivă, 16 biţi par a fi suficienţi
pentru o vizualizare rezonabilă. Ar mai fi de adăugat că transferul de imagini la
distanţă este astăzi o problemă relativ simplă, astfel încât analiza biomecanică
se poate face quasi- instantaneu în laboratoare, în timp ce înregistrările se
derulează pe terenul sportiv.
26
2.3.Interpretarea rezultatelor achiziţiilor computerizate de mărimi
biomecanice
În sens larg, achiziţiile computerizate de mărimi biomecanice pot fi
considerate măsurători ce se supun regulilor metrologiei. Reamintim că orice
proces de măsurare este supus erorilor aleatoare sau sistematice, care pot fi, pe
de o parte, nesemnificative, sau, în partea opusă, pot altera rezultatul într-o
măsură inacceptabilă. Fără a intra în detalii, prima întrebare pe care un specialist
în biomecanică şi-o pune sau ar trebui să şi-o pună, atunci când intenţionează o
achiziţie de mărimi biomecanice, este aceea dacă mărimea măsurată este şi cea
dorită. De exemplu, multe instalaţii care pretind că măsoară stabilitatea
posturală, adică mecanograma proiecţiei centrului de greutate, de fapt măsoară
viteza de variaţie a deplasărilor proiecţiei centrului de greutate în poligonul de
sustentaţie, deoarece folosesc traductoare accelerometrice şi nu lineare. Tot ca
exemplu, menţionăm o confuzie frecventă referitoare la interpretarea tensiunii
mecanice din muşchiul contractat, care este văzut de multe ori ca o mărime
proporţională cu amplitudinea semnalului electromiografic global.
Amplitudinea EMG, dar şi frecvenţa spike-urilor sau schimbările de fază sunt,
într-adevăr, proporţionale cu tensiunea mecanică, dar numai într-un ecart extrem
de îngust, corelaţia lineară fiind, astfel, nesemnificativă.
Referitor la erori, un exemplu de eroare sistematică este aceea legată de
paralaxă, adică de unghiul sub care se înregistrează video o mişcare plană.
Desigur că aceste erori sistematice pot fi corectate analitic, cel mai adesea prin
înlocuirea valorii lungimii corzii (planului de mişcare) cu lungimea arcului
aferent. Este adevărat că, de cele mai multe ori, erorile sistematice, cum ar fi
cele introduse de etalonul necorespunzător, nu schimbă interpretarea globală a
mişcării în sensul formei acesteia, dar pot genera interpretări greşite atunci când
se fac comparaţii între înregistrări diferite.[2]
Erorile întâmplătoare sau nesistematice au, prin definiţie, o multitudine
de cauze, ele fiind, în mare măsură, atribuite operatorului. Probabil că tot atât de
multe sunt şi tipurile de filtre sau metodele care pot elimina aceste erori în mod
automat (computerizat) sau decizional, prin intervenţia operatorului, considerat
aprioric că este competent şi că are experienţa statistică necesară în legătură cu
fenomenul respectiv. De exemplu, aşa-numitul criteriu Grubs de eliminare a
erorilor întâmplătoare, pretinde că mărimi izolate, a căror magnitudine se află în
afara intervalului delimitat de media aritmetică plus trei abateri standard, trebuie
considerate erori întâmplătoare.
Uneori erorile pot fi aparente sau pot ascunde fenomene neelucidate încă.
27
Interpretarea rezultatelor unei achiziţii ştiinţifice de mărimi biomecanice,
cum ar fi mişcarea sau tehnica de execuţie sportivă, ca şi a oricărui fenomen,
trebuie să fie sistematică şi sistemică. Atributul ştiinţific impune o anumită
ordine şi claritate a raţionamentelor, dar mai ales raportarea cauzală a efectului.
Logica aristotelică, prin care se leagă direct efectul de cauză, pare a fi
insuficientă pentru o interpretare corectă în ştiinţa de avangardă, unde între
cauză şi efect se interpune un proces (sau procesor, mecanism etc.). De pildă,
chiar teoretic vorbind, acelaşi antrenament practicat de doi sportivi diferiţi duce
la rezultate sportive diferite. Ceea ce diferenţiază în acest caz rezultatele poate fi
talentul diferit al celor doi sportivi, adică factorul (procesorul) individual al
heterostaziei de efort, în acest context se poate spune că toate mărimile
biomecanice măsurate au o cauză, de regulă forţele interne (contracţiile
musculare), coroborate cel puţin cu forţa gravitaţională.
Interpretarea rezultatelor procesării computerizate a acestor mărimi
trebuie să ţină cont de legile biomecanicii; amintim legea demarării mişcării,
legea conservării puterii şi legea eforturilor obositoare. O interpretare corectă nu
trebuie să ţină cont, însă, de convenţiile mecanice, în care, de exemplu, forţele
apar şi dispar instantaneu, sau lucrul mecanic nu s-ar produce fără deplasare şi
nu ar produce oboseală etc.
Subliniem, ori de câte ori avem ocazia, chiar cu riscul a ne repeta, că
dintr-un raţionament ipotetic, adică dintr-o ipoteză, chiar dacă ea se confirmă
într-un experiment, nu se poate scoate o teză, adică un fapt demonstrat.
Ipotezele sunt ca premizele particulare dintr-un silogism. Fără premiza
principală silogismul nu rezistă logic. Ipoteza, pentru a deveni teză, trebuie să
fie demonstrată, fapt imposibil de realizat experimental. Un experiment poate
doar să confirme o ipoteză şi nimic mai mult. Concluzia unui astfel de
experiment este o ipoteză confirmată (deci tot o ipoteză), fiind totuşi un pas
important în ştiinţă. Cu alte cuvinte, validarea ipotezei se face de către practică,
de regulă cu verificări multiple. Pentru a putea demonstra ceva într-un
experiment, în sens logic, ar trebui să plecăm de la premiza principală conform
căreia eşantionul studiat este cu siguranţă reprezentativ pentru pupulaţia
statistică la care ne referim. Faptul că nu ştim de la început, ci doar bănuim, că
eşantionul face parte din populaţia statistică provoacă experimentul.
Ar mai fi de adăugat faptul că optimizarea mişcării biomecanice nu
înseamnă întotdeuna şi optimizarea tehnicii de execuţie sportivă. De exemplu,
viteza maximă a mingii de tenis în serviciu se obţine atunci când serva se face
cu braţul întins şi racheta coliniară cu acesta. Numai că, după cum se vede din
practică, majoritatea jucătorilor celebri de tenis servesc cu cotul flexat, probabil
28
pentru a masca direcţia în care pleacă mingea şi a-1 surprinde pe adversar. La
fel se întâmplă şi la săritura de blocaj la volei, unde flexia genunchilor, cu toate
că ajută la înălţimea săriturii, este mascată şi redusă, tot pentru a-1 surprinde pe
adversar. Este de înţeles că în unele sporturi, precum gimnastica artistică,
criteriul de optimizare este cel estetic, care, de cele mai multe ori, se află în
contradicţie cu cel biomecanic.
3.Virtualizarea modelelor numerice
3.1 Introducere
În acest capitol sunt evidenţiate câteva aspecte esenţiale privind
modul de rezolvare, verificare şi validare a unui model numeric.
Rezolvarea modelelor numerice poate fi realizată în următoarele moduri:
rezolvarea utilizând metode analitice (în cazul în care acest lucru este
posibil) a sistemului de ecuaţii diferenţiale de mişcare al modelului;
rezolvarea sistemului de ecuaţii de mişcare al modelului cu ajutorul
metodelor numerice (situaţie foarte des întâlnită în practică, datorită
neliniarităţilor sau complexităţii deosebite a ecuaţiilor, combinate cu
inexistenţa unor metode analitice adecvate).
Prima variantă este de preferat, datorită acurateţii rezultatelor. Trebuie
luat în considerare următorul aspect important şi anume: dacă sunt necesare
ipoteze simplificatoare pentru liniarizarea modelului, acestea nu trebuie să
restrângă gradul de generalitate al acestuia sau nivelul de încredere al
rezultatelor.
Cea de a doua variantă este cel mai des utilizată datorită faptului că teoria
calculului numeric oferă în acest moment suficiente metode şi tehnici de
rezolvare pentru o gamă largă de modele matematice, pentru care calculul
analitic nu este posibil sau necesită un proces de simplificare ce schimbă total
sau parţial fundamentarea respectivului model. Folosirea acestor metode
numerice trebuie să ţină cont însă de varianta optimă dintre următorii parametri:
gradul de aproximare a soluţiei, specific metodei de rezolvare adoptate;
nivelul de discretizare a variabilelor independente, cu influenţă directă
atât asupra volumului de calcul şi a resurselor informatice necesare, cât şi
asupra preciziei şi volumului specific de date pentru variabilele ce trebuie
evaluate;
complexitatea modelului, cu referire directă la numărul caracteristicilor
esenţiale preluate şi la numărul celor ignorate, astfel încât capacitatea
29
rezultatelor finale de a caracteriza comportarea sistemului real să se
încadreze în limitele impuse iniţial.
Se menţionează de asemenea faptul că utilizarea metodelor numerice pe
scară largă este susţinută în ultimii ani atât de dezvoltarea accentuată a
sistemelor electronice de calcul automat şi de accesul facil la aceste resurse, cât
şi de apariţia şi dezvoltarea unor medii informatice integrate destinate calcului
numeric asistat (de exemplu: Mathematica®, Maple®, Matlab®, Derive®, etc.)
sau analizei dinamice asistate (de exemplu, pentru inginerie mecanica:
SimMechanics®, MapleSim®, Adams®, WorkingModel®, Dymola®,
Modellica®, etc.).
Verificarea şi validarea modelelor numerice poate fi realizată printr-o
analiză comparativă a rezultatelor obţinute prin rezolvare matematică versus
cele obţinute pe cale experimentală.
Ţinând cont de următoarele argumente:
■ dezvoltarea şi utilizarea pe scară largă a sistemelor numerice de achiziţie
şi prelucrare a datelor experimentale,
■ obţinerea soluţiilor matematice (analitice sau numerice) cu ajutorul
sistemelor informatice destinate calculului matematic asistat,
■ existenţa mediilor integrate de dezvoltare a aplicaţiilor complexe, ce
includ achiziţie, pre- şi post-procesare, calcul numeric, analiză şi prezentare a
rezultatelor,
se consideră că implementarea, evaluarea comportării şi analiza rezultatelor
unui model matematic trebuie realizate în mediul virtual, cu ajutorul sistemelor
informatice de calcul asistat. Astfel, sunt create condiţiile unei verificări şi
validări facile, prin integrarea în cadrul aplicaţiei iniţiale a unei componente
suplimentare bazată pe instrumentaţie virtuală şi achiziţie numerică a datelor
experimentale.
3.2 Dezvoltarea simulatoarelor virtuale în medii informatice
integrate
În acest capitol vor fi prezentate succint câteva consideraţii referitoare la
utilizarea sistemelor informatice de calcul şi analiza dinamică asistată de
calculator.
În general, aceste sisteme utilizează programarea de tip grafic, bazată pe
simboluri intuitive grupate după funcţionalitate şi domeniul de utilizare. Modul
de programare include de asemenea, conceptul de modularizare pe niveluri
multiple, astfel încât este facilitată dezvoltarea aplicaţiilor complexe.
30
Prezentarea grafică a rezultatelor beneficiază de instrumente puternice,
capabile sa ofere utilizatorului majoritatea uneltelor de care acesta are nevoie
pentru preluarea, structurarea, diferenţierea şi individualizarea datelor supuse
analizei finale.
Conexiunile dintre module sunt efectuate de utilizator, operaţie efectuată
manual de acesta, dar care beneficiază total de asistenţă automată din partea
sistemului informatic. Această asistenţă include analiza asociativă a tipurilor de
date manipulate şi, dacă este necesară, armonizarea tipurilor de date solitate de
o structură de tip "sursă-destinaţie", acolo unde acest lucru este posibil sau,
generarea unui mesaj de eroare cu indicaţie clară asupra cerinţelor necesare, în
cazul în care armonizarea datelor nu poate fi executată automat.
Interfaţa de intrare - ieşire a mediului virtual cu utilizatorul este realizată
pe baze intuitiv-cognitive, astfel încât dezvoltarea unei aplicaţii noi să solicite
un efort cât mai redus din partea programatorului în asimilarea unei cantităţi
iniţiale de informaţii, necesare implementării şi rezolvării modelului. Moduri
uzuale de furnizare a datelor (prin citirea datelor din fişiere, prin generarea cu
ajutorul unei expresii matematice, prin introducerea de la tastatură, prin preluare
din reţeaua informatică locală sau internet, prin achiziţie numerică directă de la
o sursă externă), precum şi cele de preluare a datelor finale (scrierea datelor în
fişiere, prezentarea tabelară sau grafică cu suport 2D/3D, transferarea prin reţea
informatică locală sau internet, transferul prin intermediul unei componente
hardware către destinaţii externe, tipărirea sub formă tabelară sau grafică pe
dispozitive periferice de tip imprimantă sau plotter) beneficiază de asemenea, de
suport şi asistenţă automată, extinse până la limita nivelului actual în acest
domeniu.
Toate consideraţiile expuse în paragrafele anterioare includ asistenţă
automată sub formă de manual de utilizare cu exemple funcţionale şi suport de
îmbunătăţire, atât a mediului informatic în general, cât şi a tipurilor, a
funcţionalităţii şi a caracteristicilor modulelor interne.
În paragrafele următoare ale acestui capitol voi fi prezentate aplicaţii
implementate, în mediul asistat de calcul şi analiză Workingmodel™ (Aceste
aplicaţii sunt destinate rezolvării, verificării şi validării modelelor matematice.)
31
3.3 Propunere model virtualizat 5 grade de liberate realizat în
Workingmodel
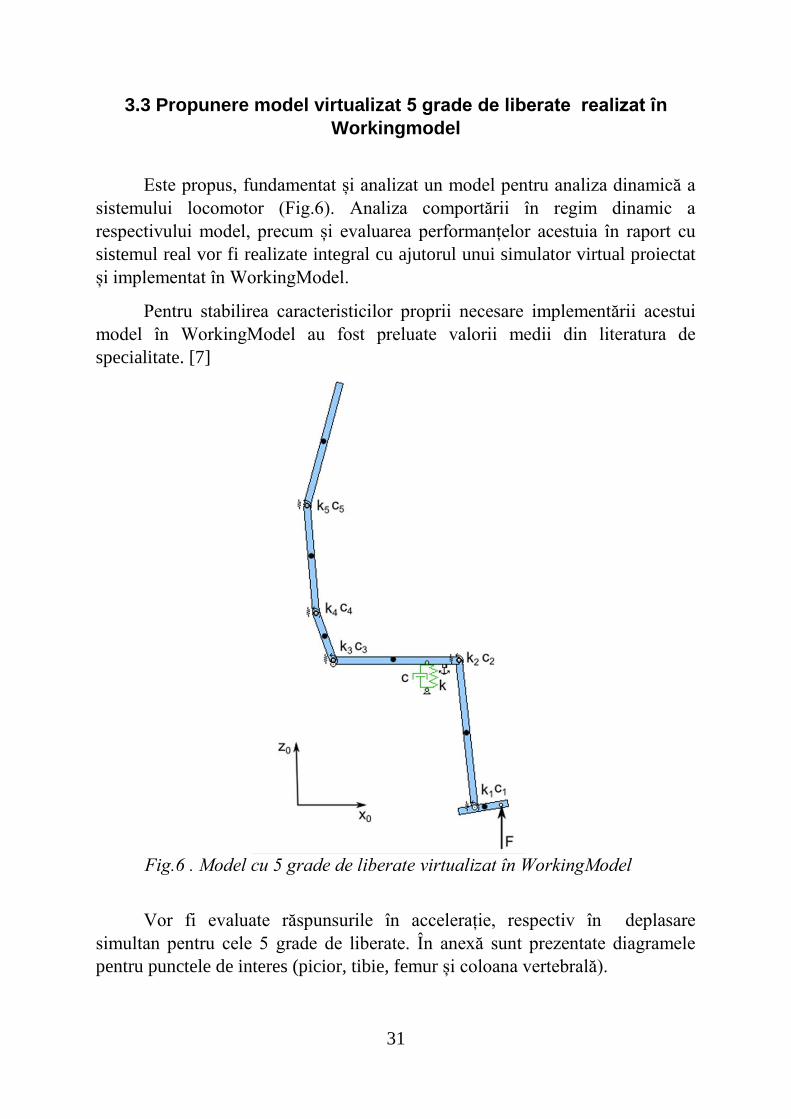
Este propus, fundamentat și analizat un model pentru analiza dinamică a
sistemului locomotor (Fig.6). Analiza comportării în regim dinamic a
respectivului model, precum și evaluarea performanțelor acestuia în raport cu
sistemul real vor fi realizate integral cu ajutorul unui simulator virtual proiectat
și implementat în WorkingModel.
Pentru stabilirea caracteristicilor proprii necesare implementării acestui
model în WorkingModel au fost preluate valorii medii din literatura de
specialitate. [7]
Fig.6 . Model cu 5 grade de liberate virtualizat în WorkingModel
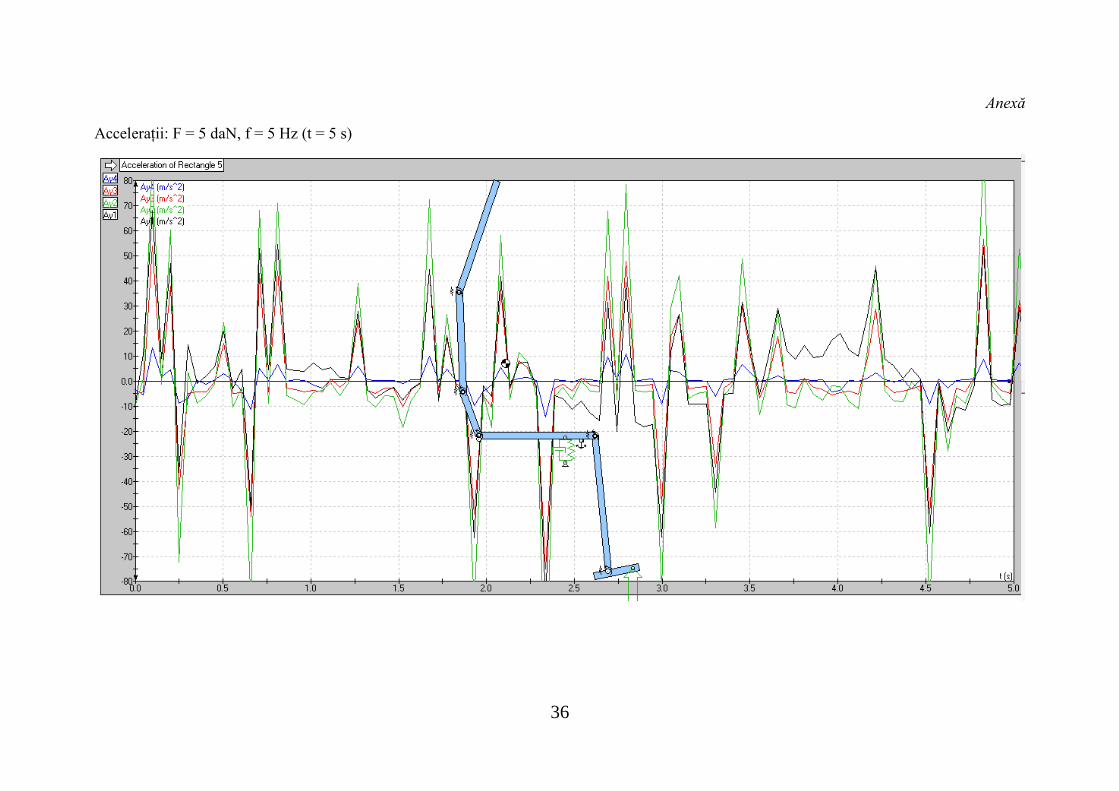
Vor fi evaluate răspunsurile în accelerație, respectiv în deplasare
simultan pentru cele 5 grade de liberate. În anexă sunt prezentate diagramele
pentru punctele de interes (picior, tibie, femur și coloana vertebrală).
32
3.4. Experimentare cu microcontroller Arduino
Arduino este una dintre cele mai simplu de utilizat platforme cu
microcontroller. Te poți gandi la el ca la un minicalculator (are puterea de calcul
a unui computer obișnuit de acum 15 ani), fiind capabil să culeagă informații
din mediu și să reacționeze la acestea.
În jurul lui Arduino există un ecosistem de dispozitive extrem de bine
dezvoltat. Orice fel de informație ți-ai dori să culegi din mediu, orice fel de
conexiuni cu alte sisteme ai avea nevoie, există o șansă foarte mare să gasești un
dispozitiv pentru Arduino capabil să iți ofere ceea ce ai nevoie. Astfel se dorește
măsurarea accelerațiilor pentru validarea modelelor teoretice și vitualizate.
Pentru achiziția accelerației am folosit un Arduino Mega 2560 plus 4
accelerometre ADXL345 (digitale) prezentate în fotografia din Fig.7.
Fig.7. Fotografie Arduino Mega 2560 plus accelerometre ADXL345
33
Senzorii de accelerație detectează (destul de evident), accelerația Fig.8.
Se pot folosi pentru măsurarea accelerațiilor instantanee pe care le înregistrează
un element în mișcare, sau pentru a detecta direcția verticală (pe baza
accelerației gravitaționale g, care are întotdeauna direcția verticală).
Fig.8.Fotografie accelerometru ADXL345 (digital)
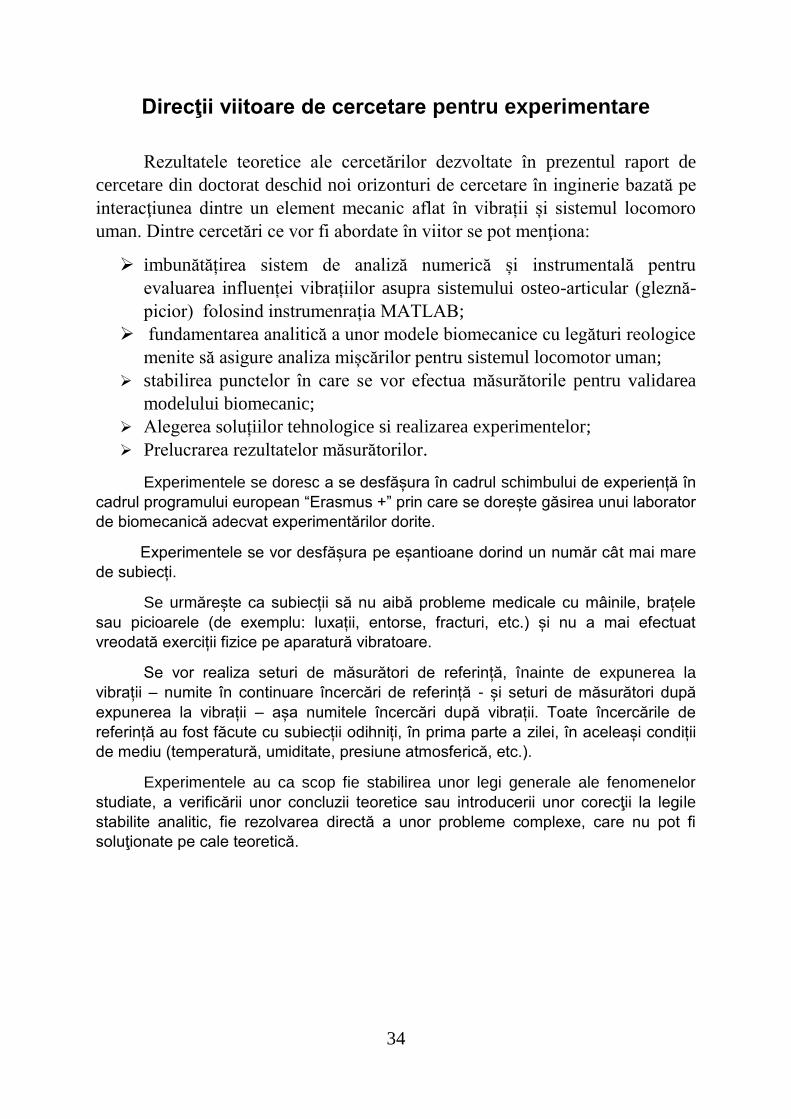
Valorile de la accelerometru pot fi obținute în timp real și vizualizate din
program cu ajutorul SerialMonitor, de exemplu în Fig.9 informațiile de la un
singur accelerometru.
Fig.9. SerialMonitor Arduino pentru un accelerometru
34
Direcţii viitoare de cercetare pentru experimentare
Rezultatele teoretice ale cercetărilor dezvoltate în prezentul raport de
cercetare din doctorat deschid noi orizonturi de cercetare în inginerie bazată pe
interacţiunea dintre un element mecanic aflat în vibrații și sistemul locomoro
uman. Dintre cercetări ce vor fi abordate în viitor se pot menţiona:
imbunătățirea sistem de analiză numerică și instrumentală pentru
evaluarea influenței vibrațiilor asupra sistemului osteo-articular (gleznă-
picior) folosind instrumenrația MATLAB;
fundamentarea analitică a unor modele biomecanice cu legături reologice
menite să asigure analiza mișcărilor pentru sistemul locomotor uman;
stabilirea punctelor în care se vor efectua măsurătorile pentru validarea
modelului biomecanic;
Alegerea soluțiilor tehnologice si realizarea experimentelor;
Prelucrarea rezultatelor măsurătorilor.
Experimentele se doresc a se desfășura în cadrul schimbului de experiență în
cadrul programului european “Erasmus +” prin care se dorește găsirea unui laborator
de biomecanică adecvat experimentărilor dorite.
Experimentele se vor desfășura pe eșantioane dorind un număr cât mai mare
de subiecți.
Se urmărește ca subiecții să nu aibă probleme medicale cu mâinile, brațele
sau picioarele (de exemplu: luxații, entorse, fracturi, etc.) și nu a mai efectuat
vreodată exerciții fizice pe aparatură vibratoare.
Se vor realiza seturi de măsurători de referință, înainte de expunerea la
vibrații – numite în continuare încercări de referință - și seturi de măsurători după
expunerea la vibrații – așa numitele încercări după vibrații. Toate încercările de
referință au fost făcute cu subiecții odihniți, în prima parte a zilei, în aceleași condiții
de mediu (temperatură, umiditate, presiune atmosferică, etc.).
Experimentele au ca scop fie stabilirea unor legi generale ale fenomenelor
studiate, a verificării unor concluzii teoretice sau introducerii unor corecţii la legile
stabilite analitic, fie rezolvarea directă a unor probleme complexe, care nu pot fi
soluţionate pe cale teoretică.
35
Bibliografie:
1. A. Constantinescu, C.
Pavel.
Vibrații mecanice, ISBN 978-973-755-468-0, Editura
MATRIXROM, București, 2009
2. A. GAGEA Biomecanică analictică. Editura A.N.E.F.S, București
2006
3. A. Iliescu Biomecanica exercițiilor fizice, Editura C.N.E.F.S,
București, 1968
4. A. Picu Modelarea biomecanică neliniară a dinamicii corpului
uman sub acțiunea vibrațiilor transmise, Teză de
doctorat, 2010
5. R. Panaitescu-Liess Modelarea biomecanică a organismului uman sub
acțiunea vibrațiilor, Teză de doctorat, UTCB, București
2013
6. Griffin, M.J. Vibration and human responses , Handbook of Human
Vibration London. Academic Press. Inc.2000.
7. Guangtai Zheng, Yi
Qiu, Michael J
Griffin
An analytic model of the in-line and cross-axis apparent
mass of the seated human body exposed to vertical
vibration with and without a backrest, Journal of Sound
and Vibration,2010
8. Vlad Marius Raport de cercetare 2; 2015
**SURSĂ COPERTĂ.
..WWW.PORTFOLIOBIOMECANICABRUNA.BLOGSPOT.RO (2014)
36
Anexă
Accelerații: F = 5 daN, f = 5 Hz (t = 5 s)
37
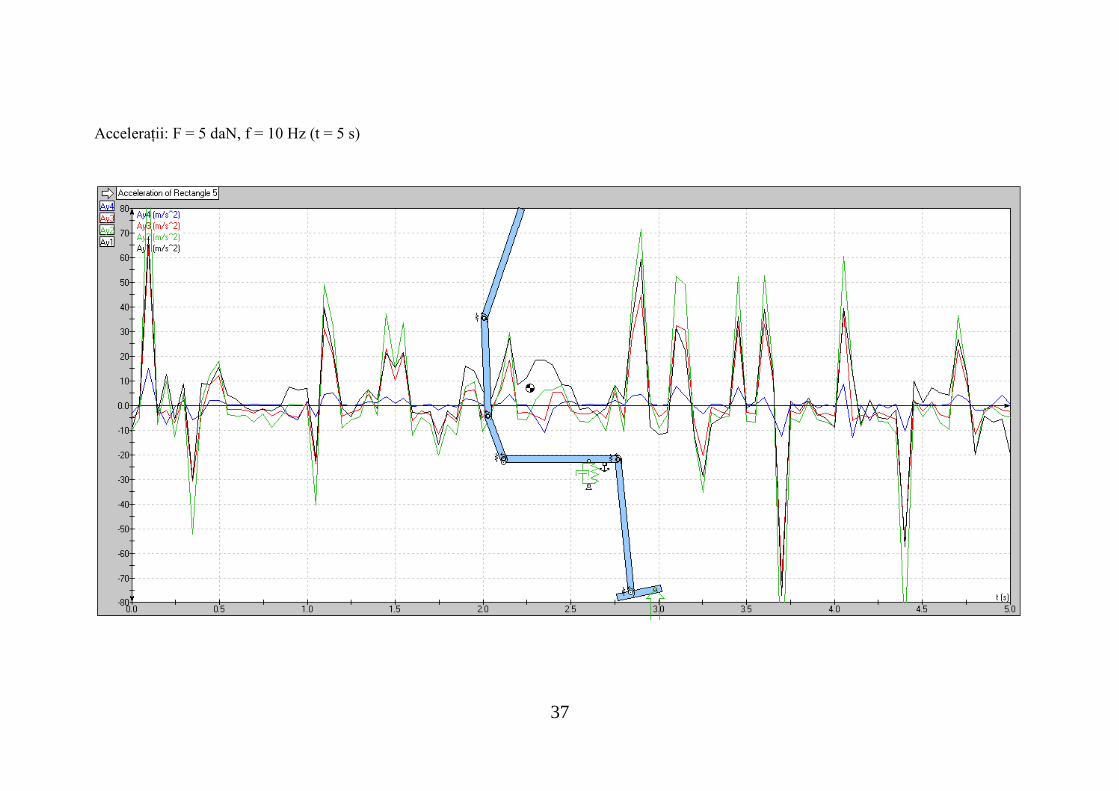
Accelerații: F = 5 daN, f = 10 Hz (t = 5 s)
38
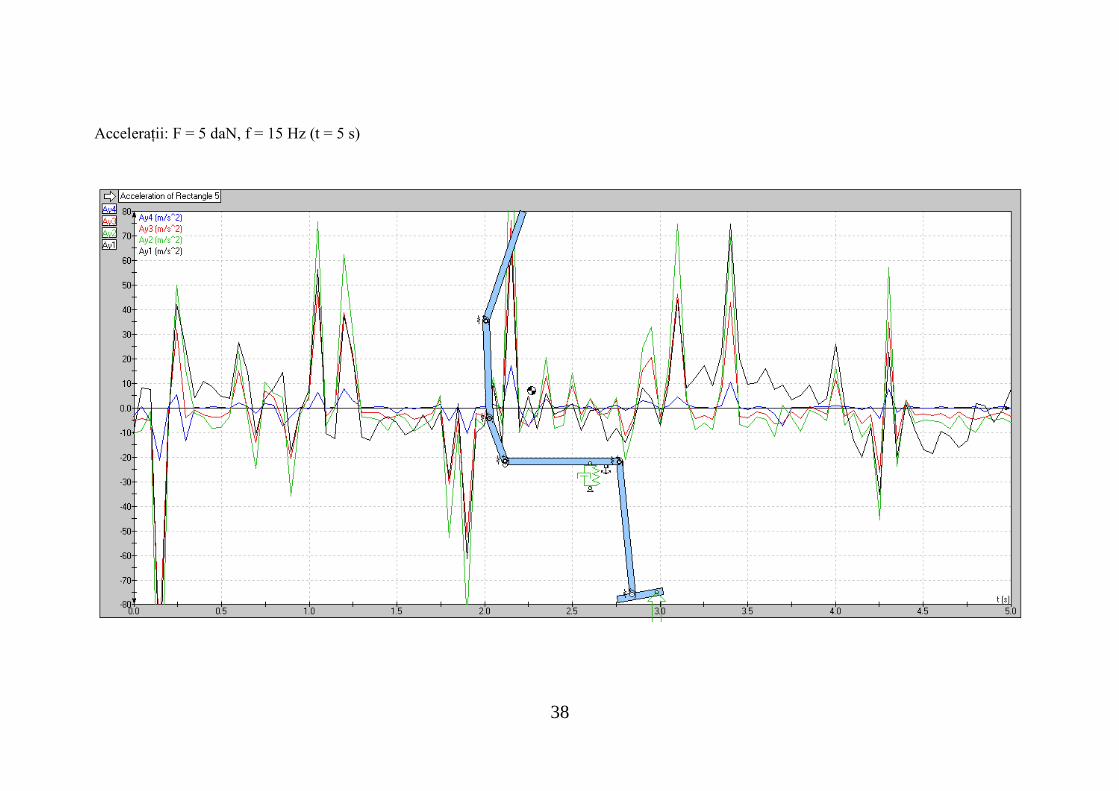
Accelerații: F = 5 daN, f = 15 Hz (t = 5 s)
39
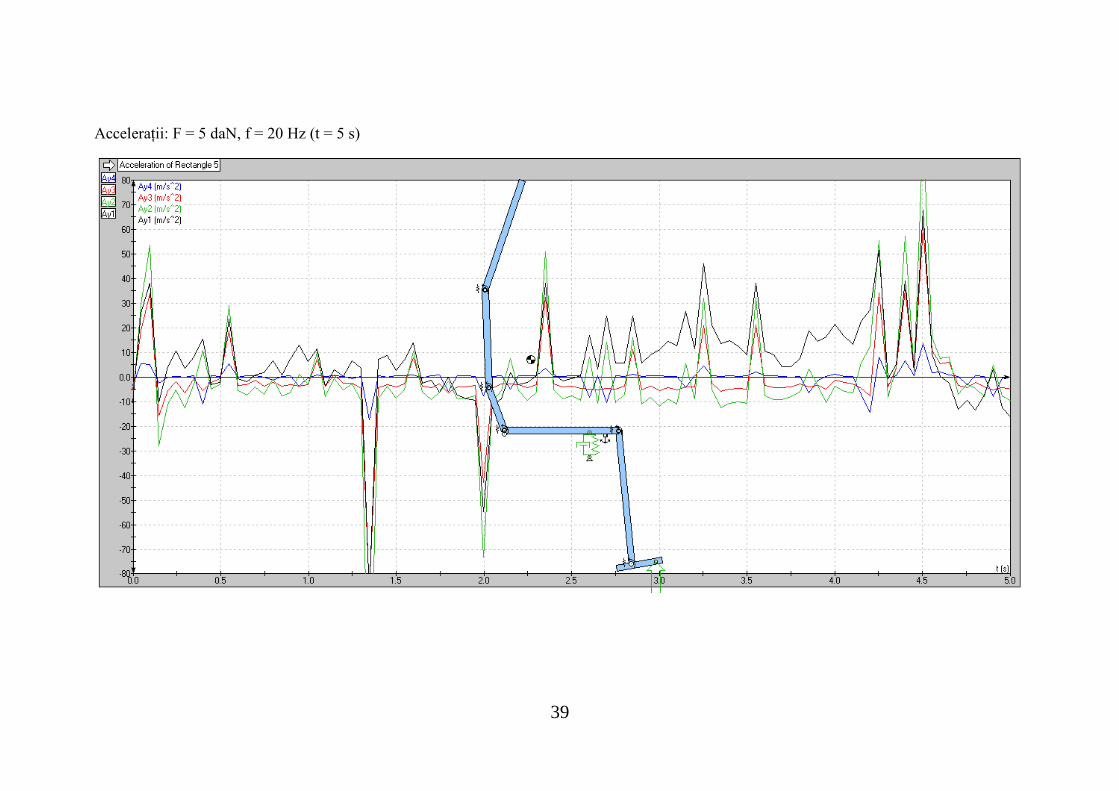
Accelerații: F = 5 daN, f = 20 Hz (t = 5 s)
40
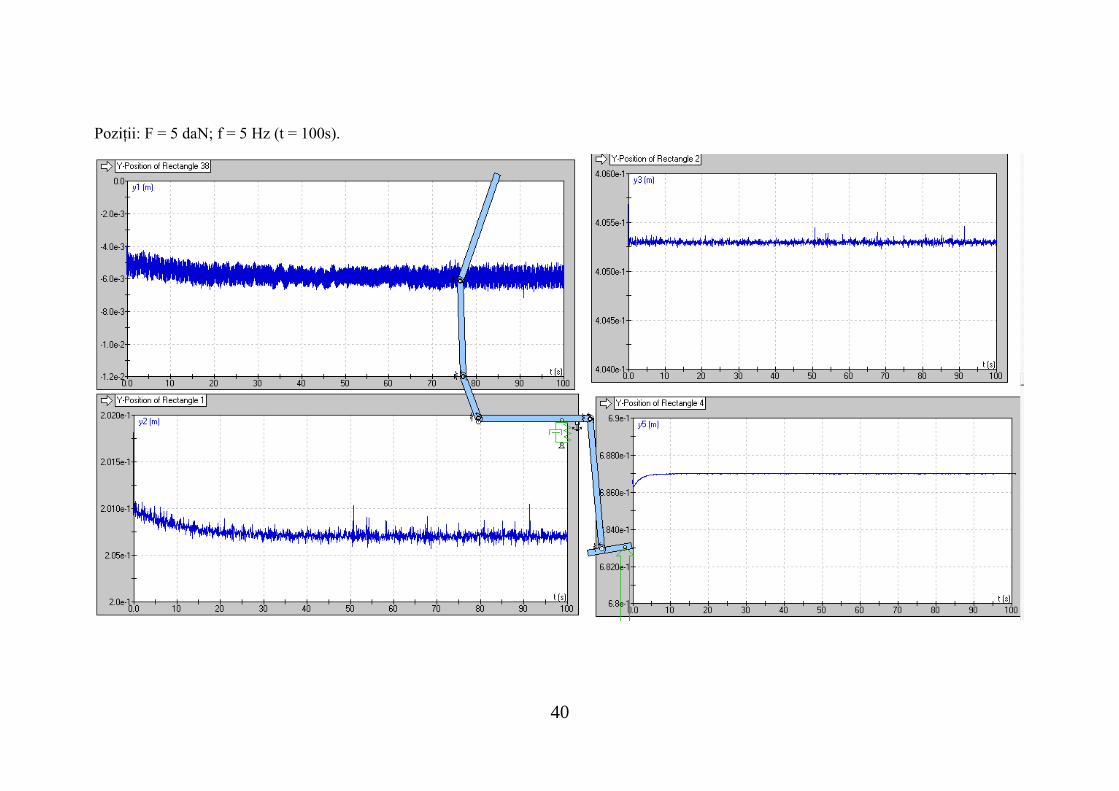
Poziții: F = 5 daN; f = 5 Hz (t = 100s).
41
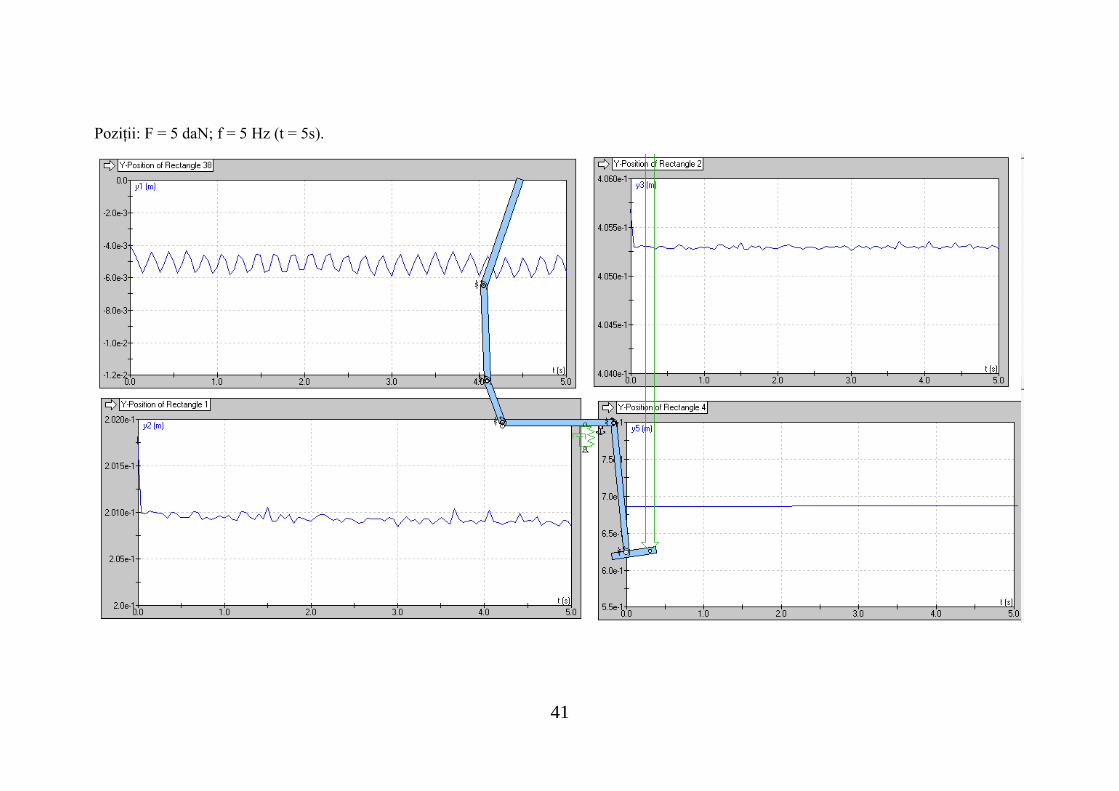
Poziții: F = 5 daN; f = 5 Hz (t = 5s).
42
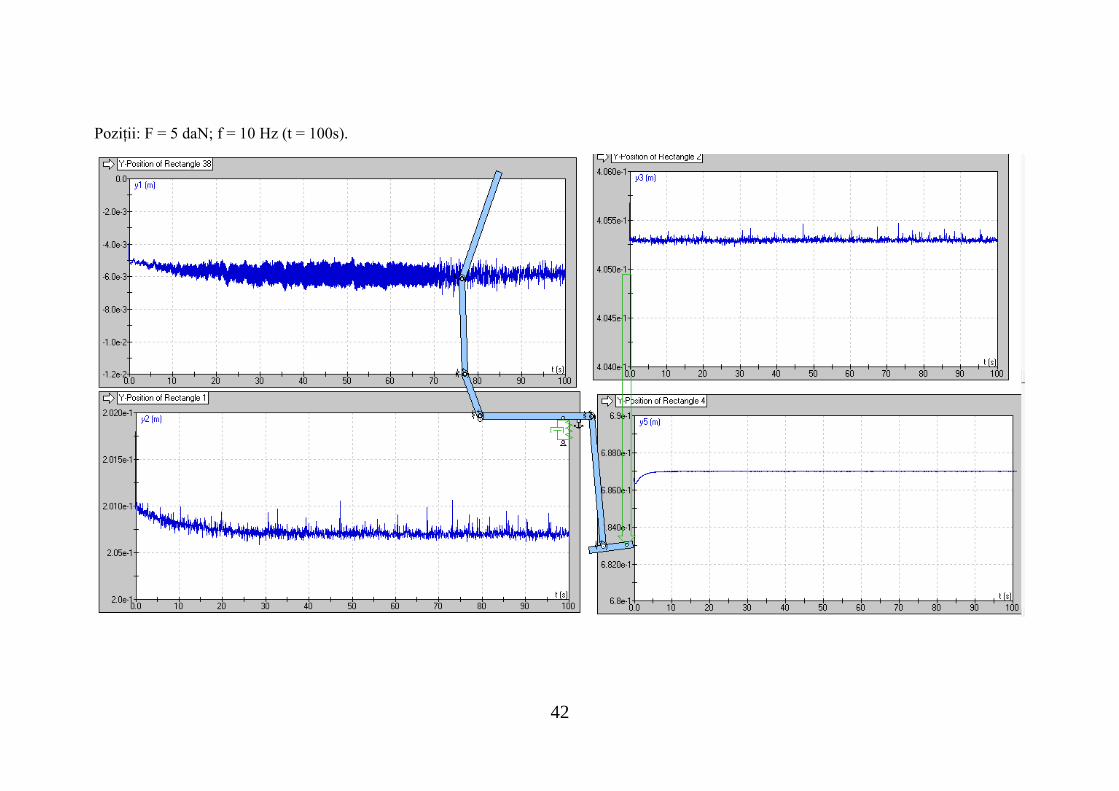
Poziții: F = 5 daN; f = 10 Hz (t = 100s).
43
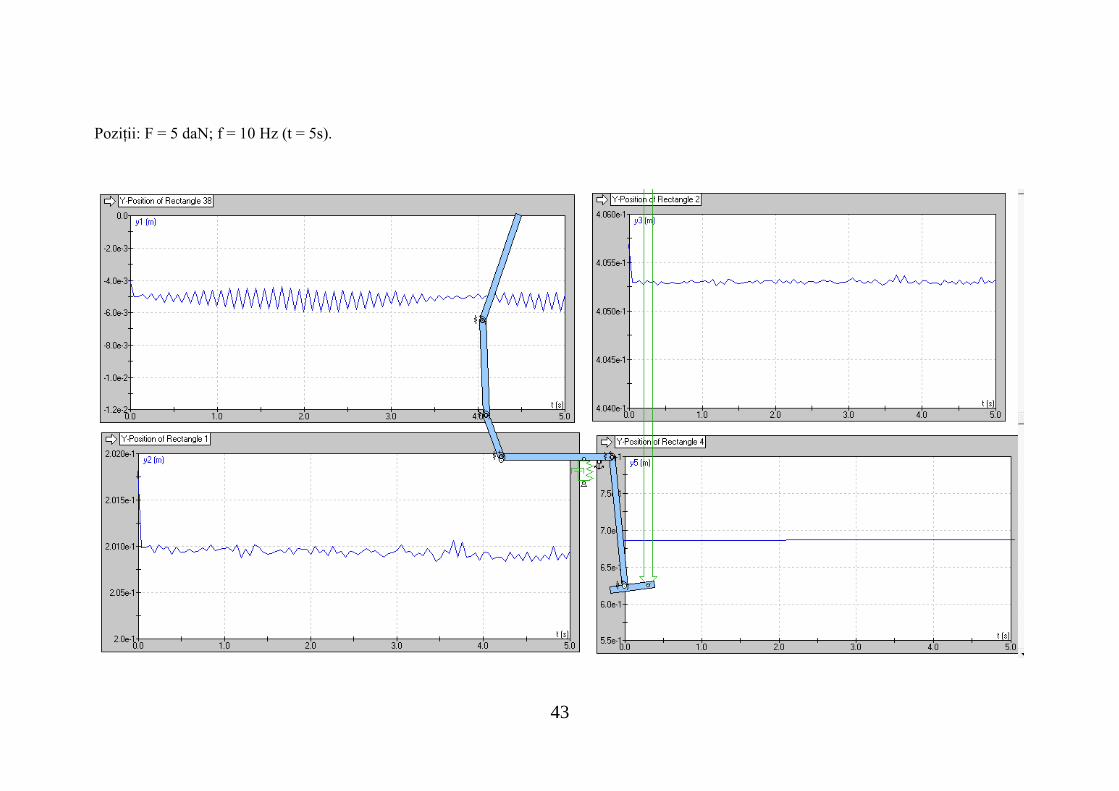
Poziții: F = 5 daN; f = 10 Hz (t = 5s).
44
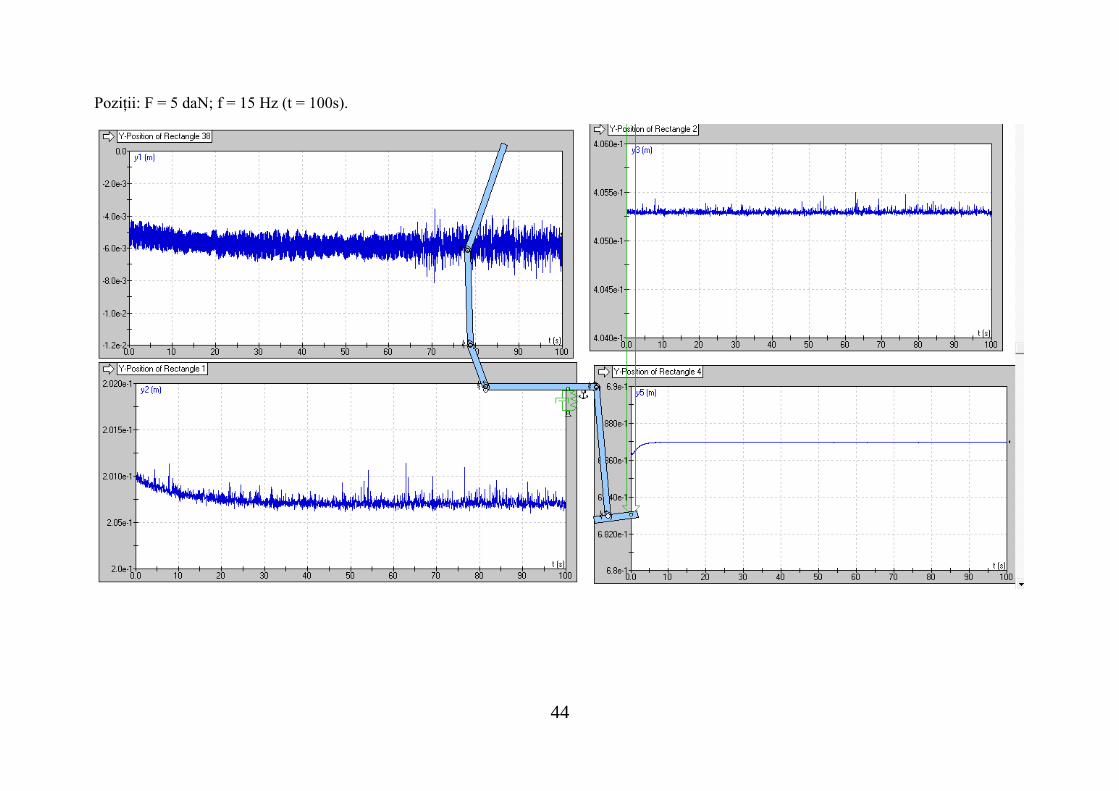
Poziții: F = 5 daN; f = 15 Hz (t = 100s).
45
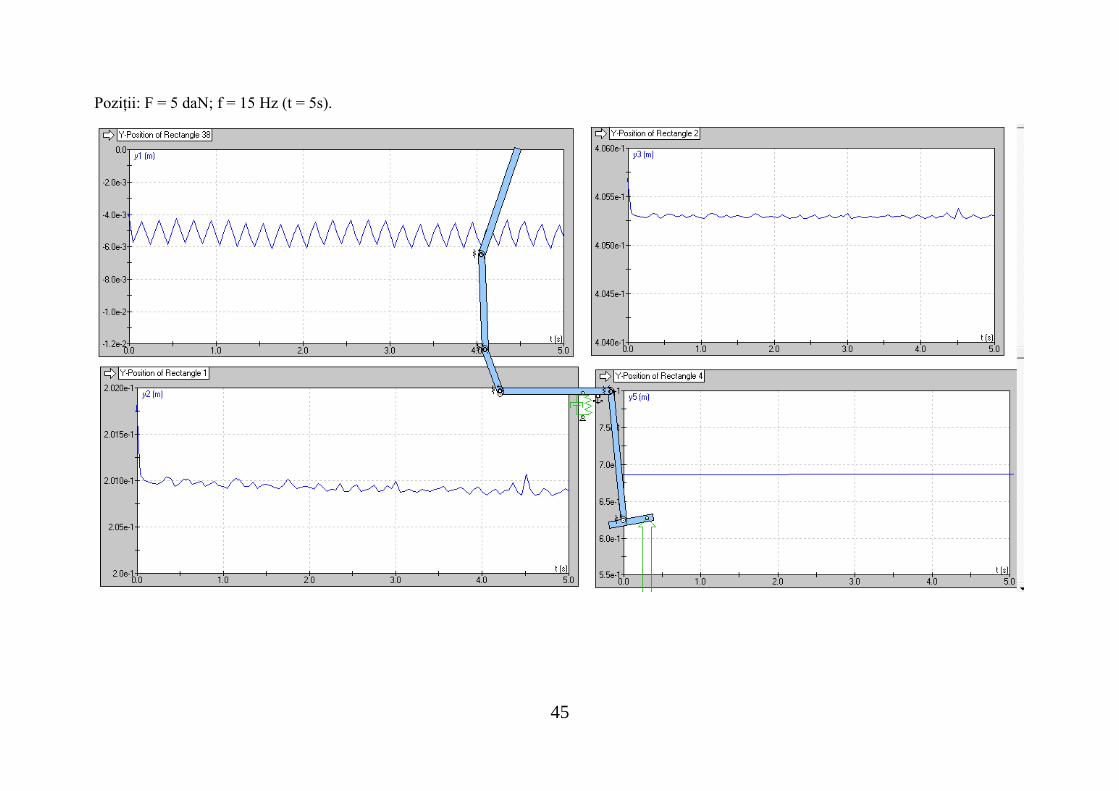
Poziții: F = 5 daN; f = 15 Hz (t = 5s).
46
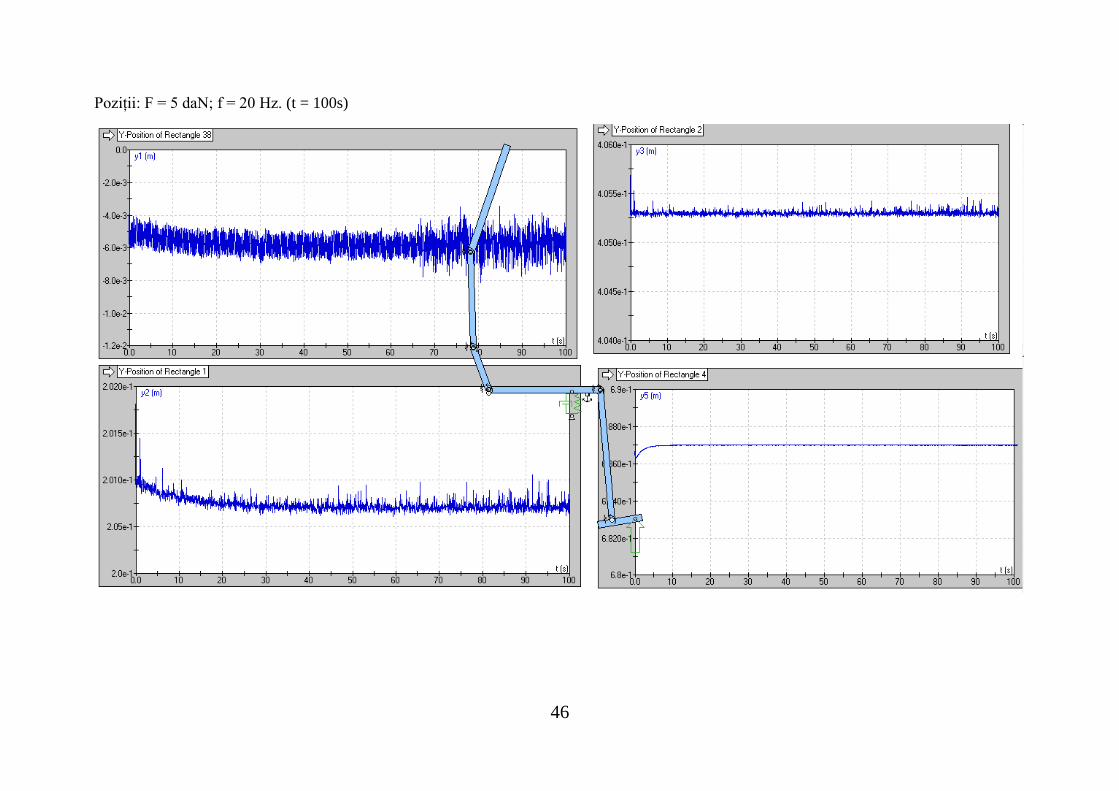
Poziții: F = 5 daN; f = 20 Hz. (t = 100s)
47
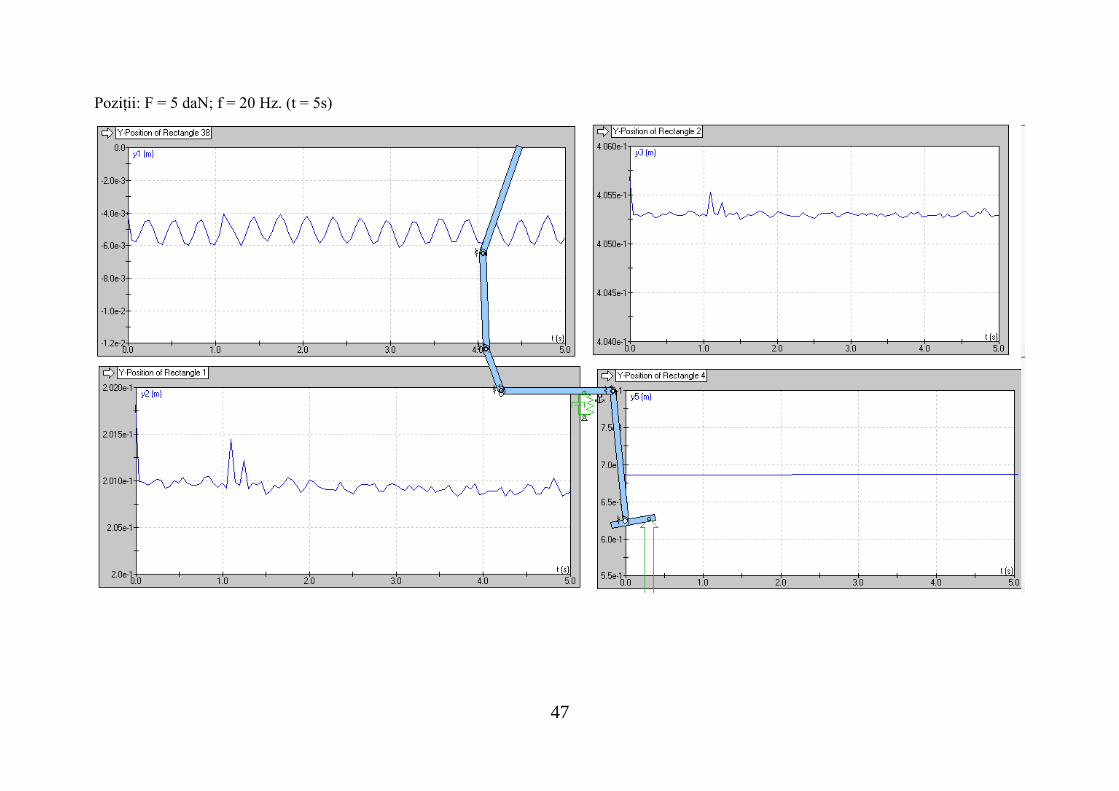
Poziții: F = 5 daN; f = 20 Hz. (t = 5s)