Embed Size (px)
DESCRIPTION
Modele biomecanice propuse pentru studiul aparatului locomotor uman sub acțiunea vibrațiilor,, Capitolul 1, Introducere,1.1. Domeniul de studiu, 1.2. Scop și obiectiv 1.3. Principiile modelării Capitolul 2. Biocinematica. 2.1. Sisteme de referință 2.2. Transformări omogene 2.3 Convenția DENAVITT-HARTENBERG, Capitolul 3 Modelul cinematic 3.1. Cazul general 3.2. Modelarea cinematică a membrului inferior, Capitolul 4 Modelarea solicitărilor statice şi dinamice ale sistemelor anatomice gleznă-picior şi genunchi – gambă, Capitolul 5 , Expunerea organismului uman la vibrații, Capitolul 6 , Studiul stabilității unei proteze de gambă cu ajutorul mediului simulink. Și Ultimul capitol. Capitolul 7 Model biomecanic al gleznei realizat în Simmechanics.
Citation preview

Modele biomecanice propuse pentru studiul aparatului locomotor uman sub acțiunea
vibrațiilor
(Raport de cercetare științifică nr.2 )
Doctorand: ing. Vlad Marius Domeniul de doctorat: Inginerie Mecanică Specializarea: Mecanică tehnică și vibrații
Conducător științific: Prof.univ.dr.ing. Cristian Pavel
-2015-
Ministerul Educației Naționale
Universitatea Tehnică de Construcţii Bucureşti
Școala Doctorală

Cuprins
:Capitolul 1. Introducere.............................................................................................................2
1.1. Domeniul de studiu..........................................................................................................2
1.2. Scop și obiectiv................................................................................................................2
1.3. Principiile modelării........................................................................................................4
Capitolul 2. Biocinematica........................................................................................................6
2.1. Sisteme de referință.........................................................................................................7
2.2. Transformări omogene..................................................................................................12
2.3. Convenția DENAVITT-HARTENBERG.....................................................................17
Capitolul 3. Modelul cinematic................................................................................................23
3.1. Cazul general.................................................................................................................23
3.2. Modelarea cinematică a membrului inferior.................................................................25
3.2.1.Considerații anatomice............................................................................................25
3.2.2. Modelul cinematic complet al membrului inferior liber.........................................30
3.2.3. Modelul cinematic redus al membrului inferior.....................................................34
Capitolul 4. Modelarea solicitărilor statice şi dinamice ale sistemelor anatomice gleznă-picior şi genunchi – gambă.................................................................................................................39
4.1 Modelarea sistemului anatomic gleznă – picior folosind metoda dinamicii inverse......39
4.2. Modelarea sistemului anatomic genunchi – gambă folosind metoda dinamicii inverse..............................................................................................................................................44
Capitolul 5. Expunerea organismului uman la vibrații............................................................48
5.1 Determinarea limitelor de expunere a întregului corp la vibrații...................................49
5.2. Criteriile expunerii întregului corp la vibrații...............................................................53
Capitolul 6. Studiul stabilității unei proteze de gambă cu ajutorul mediului simulink............57
6.1. Introducere.....................................................................................................................57
6.2. Studiul modelului dinamic cu ajutorul mediului simulink............................................58
6.3. Rezultatele simulării......................................................................................................59
7.Model biomecanic al gleznei realizat în Simmechanics.......................................................61
Rezultatele simulării.............................................................................................................65
Direcţii viitoare de cercetare....................................................................................................66
Bibliografie:.............................................................................................................................67
1
Capitolul 1. Introducere
1.1. Domeniul de studiu
Înțelegerea relațiilor mecanice dintre cauză și efect, relații ce apar în timpul mișcării organismelor vii, a preocupat omenirea încă din cele mai vechi timpuri. Aristotel, Leonardo da Vinci, Borelli, Newton, iar mai aproape de noi, din perspectiva spațio – temporală, prof. Rainer, au fost atrași, alături de atâția alții, de studierea mecanismelor mișcării corpului omenesc.
Apar modele biomecanice asociate organismului uman care au suferit transformări succesive ce le-au sporit complexitatea și acuratețea explicării fenomenelor și proceselor care se produc în corpul omenesc.
Astfel, proiectul de cercetare: Analiza comportării dinamice a aparatului locomotor uman sub acțiunea vibrațiilor mecanice (LOCOVIB), va fi un rezultat din studiu științific ce stabilește priorități și domenii noi de cercetare științifică în abordarea fenomenelor vibrațiilor asupra unui sistem anatomic, având în vedere faptul că studiul cinematici corpului uman în general și a sistemului locomotor este la început.
Oportunitatea acestui raport de cercetare științifică este dată atât de evidenţierea unor aspecte insuficient abordate în cadrul domeniului multidisciplinar (biomecanică, mecanică), de analiza comportării dinamice a aparatului locomotor uman sub acțiunea vibrațiilor mecanice, cât şi de utilitatea abordărilor teoretice şi practice a biomecanici din perspectiva cinematică propusă în cadrul raportului de cercetare științifică.
1.2. Scop și obiectiv
Problematica modelării biomecanice a sistemului locomotor uman sub acțiunea vibrațiilor mecanice, justifică tema aleasă de cercetare astfel obiectivul principal al acestui raport este: fundamentarea biocinematici și validarea cu ajutorul modelelor biomecanice și a instrumentației virtuale a unui set de modele destinate studiului comportări dinamice a aparatului locomotor uman.
A fost dezvoltată o metodologie indirectă fără contact în scopul de detectare dinamică, pentru aplicația în biomecanică: aparatul locomotor uman
2

sub acțiunea vibrațiilor mecanice. Astfel, în lipsa unui model complex biomecanic se recurge la:
Identificarea și fundamentarea analitică a unor modele biomecanice cu legături reologice menite să asigure analiza sistemului locomotor uman sub acțiunea vibrațiilor mecanice;
Conceperea unor modele biomecanice versatile prin amplasarea corespunzătoare pe diverse trasee de acțiune a unor elemente, astfel încât răspunsul final al modelului să poată atingă precizia și gradul de fidelitate parametrică;
Conceperea și realizarea unui sistem de analiză numerică și instrumentală pentru evaluarea influenței vibrațiilor mecanice asupra sistemului osteo-articular (gleznă – picior) folosind instrumentație virtuală.
Contribuția teoretică, matematică care să fundamenteze soluțiile propuse, metodele și algoritmii utilizați și soluțiile propuse, pentru atingerea problemei propuse are în vedere:
Elaborarea unor noi modele și metode; Conceperea unor sisteme moderne; Adaptarea soluțiilor existente într-un domeniu de activitate la un proces
tehnologic sau sistem tehnic dintr-un alt domeniu de activitate.
Oamenii sunt mai sensibili la vibrațiile întregului corp sub excitație de șoasă frecvență conform literaturii de specialitate, astfel se pot considera mai multe porți de intrare a vibrațiilor mecanice în corpul uman (mâini, aparat locomotor, cutie toracică, etc).
Ca urmare, biodinamica omului sub acțiunea vibrațiilor mecanice a fost un subiect de interes de-a lungul anilor, și au fost stabilite o serie de modele matematice. În timp ce multe cercetări au fost efectuate pe construirea de modele biodinamice specifice, bazate pe anumite date experimentale în condiții de testare precise, o investigație amănunțită a modelelor umane matematice a aparatului locomotor sub acțiunea vibrațiilor din exterior nu a primit încă același nivel de atenție.
În această lucrare, a fost efectuat un studiu pornind de la principiile modelări în mod general, astfel raportul de față are 7 capitole : Introducere , Bioconematica,Modelul cinematic, Modelarea solicitărilor statice şi dinamice ale sistemelor anatomice gleznă-picior şi genunchi – gambă, Studiul stabilității unei proteze de gambă cu ajutorul mediului simulink, Model biomecanic al gleznei realizat în Simmechanics.
3

1.3. Principiile modelării
În natură nu există fenomene izolate. Totdeauna, simultan fenomenului investigat se desfăşoară un număr apreciabil de fenomene cu care acesta are relaţii şi influenţe reciproce. În vederea cercetării fenomenului respectiv, primul demers care trebuie înfăptuit este a delimita aria investigată, de a elimina influenţele parazite, nesemnificative pentru scopul propus. Aceasta implică de fapt emiterea unor ipoteze, elaborarea unor scheme sau conceperea modele ale fenomenului în cauză.
Paradoxal este faptul că pentru a modela corect un fenomen este necesară cunoaşterea cât mai cuprinzătoare a sa, ceea ce reduce nevoia de a-l cerceta. Pe de altă parte, modelul trebuie să fie adecvat scopului propus: un model excesiv de complicat - care îşi propune să aibă în vedere toate aspectele posibile ale fenomenului - poate deveni costisitor, greoi sau chiar inoperant, iar un model simplist prea sumar, poate fi incorect, ca urmare a neglijării unor aspecte importante ale fenomenului.
Conceput în sensul cel mai general, modelul poate fi funcţional, de calcul sau experimental.
Modelul funcţional este un model structural, teoretic sau experimental, care pune în evidenţă diversele componente ale fenomenului şi ilustrează calitativ legăturile reciproce ale acestora astfel încât să rezulte funcţiile globale fundamentale ale ansamblului.
Modelul de calcul este un model teoretic, care, pornind de la un set coerent de ipoteze, stabileşte o schemă de calcul, un număr de teoreme şi relaţii de calcul ce descriu cantitativ şi calitativ fenomenul. Trecerea modelului de calcul pe un calculator numeric sau analogic desigur că poate urmări considerabil eficienţa acestuia. Setul de programe care se utilizează pe calculator în legătură cu modelul investigat face parte integrantă din modelul respectiv .
4
Modelarea sistemelor biomecanice se pot realiza prin folosirea unuia din cele două tipuri de modele, și anume: modele analitice și modele experimentale. În acest raport se pune accent asupra modelelor analitice. Datorită complexității fenomenelor biomecanice, precum și datorită dificultăților matematice care apar la scrierea și rezolvarea ecuațiilor de mișcare ale aparatului locomotr uman, pentrul studiul dinamicii corpului uman se folosesc, adesea, modele experimentale, fie în mod direct, fie după o modelare analitică în prealabilă.[32]
Modelarea analitică comportă, în general, parcurgerea următoarelor etape:
modelare fizică;
modelarea matematică;
Modelarea fizică presupune formularea unui “model fizic” a cărui comportare să aproximeze cât mai bine pe cea a sistemului real. Modelul fizic se aseamănă cu sistemul real în ceea de ptivește caracteristicile de bază, dar este mai simplu și deci mai abordabil analizei. Astfel, elementele componente ale unui sistem biomecanic pot fi modelate prin corpuri solide rigide, arcuri, amortizoare etc., iar acțiunea reciprocă a două corpuri poate fi schematizată prin forțe concentrate, cupluri concentrate, sarcini distribuite etc.
În multe cazuri, răspunsul dinamic al structurilor biomecanice poate fi reprezentat printr-un model cu “parametri concentrați”, compus din mase, arcuri și amortizoare.
Aproximațiile care se fac la formularea modelelor se referă la:
neglijarea efectelor secundare;
neglijarea unor interacțiuni cu mediul abiant;
înlocuirea caracteristicilor ”distribuite” prin parametri “concentrați” similari;
liniarizarea relațiilor cauză efect între variabilel fizice;
neglijarea variașiei în timp a unor paramteri.
Pe parcursul îmbunătățirii modelului și a definirii mai precise a problemei analizate, se renunță la o parte dintre aceste aproximații.
Modelarea matematică presupune elaborarea unui “model matematic” care să reprezinte modelul fizic, respectiv scrierea ecuațiilor de stare (cinematice, statice, dinamice) ale sistemului fizic. Trecerea de la modelul fizic la modelul matematic se realizează în câteva etape succesive:
5

stabilirea ecuațiilor de stare (de exemplu, ecuațiile de echilibru, static sau dinamic) pentru sistemul analizat;
stabilirea ecuațiilor de compatibilitate, care exprimă legătura dintre mișcările subsistemelor interconectate;
scrierea legilor fizice.
Uneori nu este posibil să fie scrise ecuațiile matematice de stare ale sistemului biofizic, datorită complexității fenomenelor fizice din interior sistemului analizat. În acest caz, se utilizează alte tipuri de analiză (de exemplu, alaliza dimensională).[32]
Capitolul 2. Biocinematica
Studiul diferitelor mișcări ale corpului uman sau ale unor părți ale sale, fără a ține seama de factorii ce produc aceste mișcări, este denumit generic Biocinematică. Studiul acesta implică mai multe etape a căror tratare se realizează pornind logic de la cele mai simple aspecte spre cele mai complexe.
Într-o primă abordare se poate studia doar mișcarea corpului, fie în ansamblu, fie doar a anumitor părți ale sale, în ipoteza că este vorba despre un corp rigid sau un ansamblu de corpuri rigide. Această abordare se finalizează prin scrierea legilor de mișcare și stabilirea vitezei și accelerației pentru orice punct ce aparține corpului în ansamblu sau părții studiate din acesta. În mișcările uzuale, viteza și accelerația nu sunt importante pentru corpul uman, în această situație studiul rezumându-se la determinarea legilor de mișcare. Doar când se impun anumite criterii de performanță în mișcare este necesar să se realizeze anumite viteze și anumite accelerații, de regulă variabile după legi impuse. [19]
Studiul cinematic al mișcărilor umane este aparent simplu, deoarece nu ia în considerare faptul că ansamblul corpurilor sau părțile sale nu sunt rigide în realitate, ci au forme diferite în funcție de etapa de mișcare în care se află. Pentru anumite mișcări simple se poate modela corpul (sau partea studiată) ca un singur solid rigid, urmând a se compune mișcarea dintr-o succesiune de faze, meodelul rezultat pentru mișcare fiind mai mult sau mai puțin aproximativ. Modul global de abordare cinematică se realizaează în funcție de pretențiile
6
impuse asupra exactității modelării corpului și mișcării, acesta decizându-se prin luarea în considereare a aplicașiei reale în cadrul căreia vor fi utilizate.[19]
2.1. Sisteme de referință
Pentru o abordare pur cinematică, corpul uman poate fi privit ca un sistem de corpuri rigide legate prin articulații. Deși părțile corpului uman nu sunt structuri rigide, ele pot fi tratate astfel în timpul studierii biocinematicii, deoarece sistemul osos este format din corpuri nedeformabile (de lungime constantă). Această simplificare are avantajul unei abordări simple și, în același timp, oferă concluzii suficient de concordante cu realitatea. Adoptând această ipoteză, se poate defini, la orice moment, situarea corpului, sau ale unor părți ale sale, prin indicarea poziției și orientării, ceea ce se realizează prin definirea:
- unui sistem de referință fix (SF), unic și bine precizat;
- câte un sistem de referință (SA) atașat fie corpului, fie unei anumite părți a acestuia.[19]
În mod convențional, sistemul triortogonal fix este definit ca reper cartezian, într-un punct oarecare din spațiul exterior. Convenția de alegere a axelor nu prea are mare importanță; important este însă ca această convenție să fie păstrată atât pentru sistemul fix respectiv, cât și pentru sistemele atașate.
În studiul biomecanicii, sunt frecvent folosite și sistemele de referință în care exprimarea pozițiilor se realizează în coordonate intrinseci adaptate structurii organismului, având axele după direcțiile tangentei, normalei și binormalei într-un punct la curba reprezentată de un anumit traseu nervos sau vascular al corpului uman.
Între coordonatele aceluiași punct exprimate în diferite sistem de referință, ca și între sistemele de referință însele, se pot scrie relații de legătură care le definesc perfect, cele mai utilizate fiind cele matriciale. Acestea oferă avantajul unor algoritmi simpli de operare, astfel încât la orice moment se poate exprima, în urma efectuării unor operații simple de îmulțire a matricelor, poziția oricăruia sintre corpurile sistemului față de orice sistem de referință.
Cu preponderență în literatura medicală [26], [52], studiul mișcării corpului uman se realizează în mod convențional prin utilizarea a două sisteme de referință atașate corpului, îmbinându-se avatajele comasate ale celor mai simple mișcări, cea de translație și cea de rotație cu axă fixă. Nu numai că aceste mișcări pot fi simplu exprimate prin matricele de transformare omogenă
7

corespunzătoare, dar prin compunerea lor poate fi obținută orice altă mișcare a corpului, indiferent de complexitatea sa. Cele două sisteme de referință astfel utilizate sunt:
primul sistem ale cărui axe sunt mereu paralele cu cele ale sistemului de referință fix și care efectuează, deci, doar mișcare de translație; acesta este denumit impropriu sistem mobil și are, de regulă, origine în centrul maselor;
al doilea sistem, numit sistem somatic, cu origine într-un punct oarecare, își schimbă doar orientarea axelor în funcție de modificarea orientării corpului.
Cel mai frecvent sunt folosite sistemele somatice anatomice.
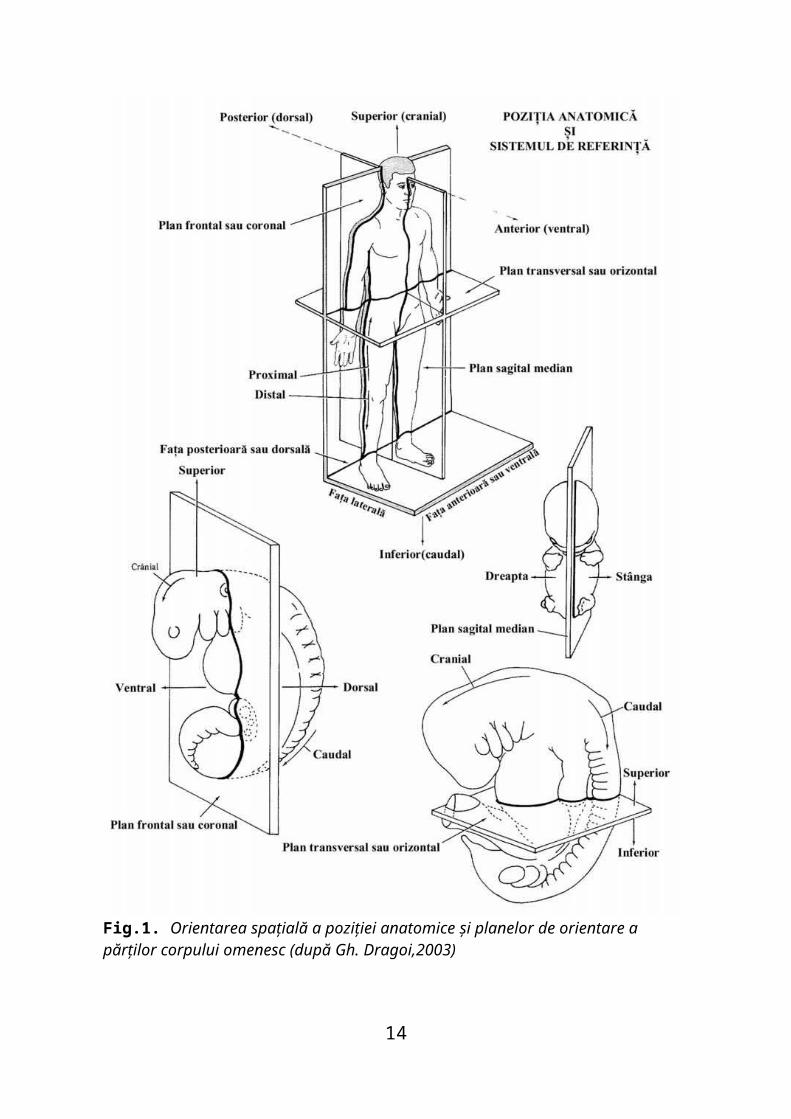
Unul din sistemele somatice frecvent utilizate este prezentat în figura 1.
8

Fig.1. Orientarea spațială a poziției anatomice și planelor de orientare a părților corpului omenesc (după Gh. Dragoi,2003)
9

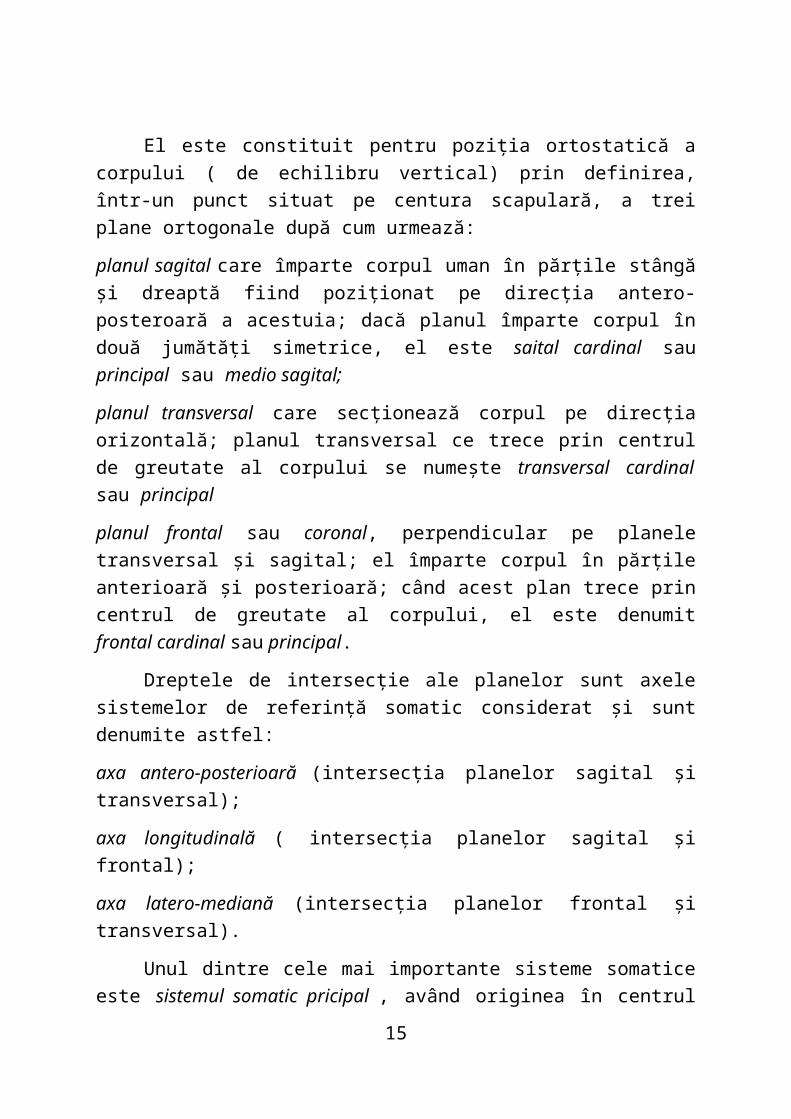
El este constituit pentru poziția ortostatică a corpului ( de echilibru vertical) prin definirea, într-un punct situat pe centura scapulară, a trei plane ortogonale după cum urmează:
planul sagital care împarte corpul uman în părțile stângă și dreaptă fiind poziționat pe direcția antero-posteroară a acestuia; dacă planul împarte corpul în două jumătăți simetrice, el este saital cardinal sau principal sau medio sagital;
planul transversal care secționează corpul pe direcția orizontală; planul transversal ce trece prin centrul de greutate al corpului se numește transversal cardinal sau principal
planul frontal sau coronal, perpendicular pe planele transversal și sagital; el împarte corpul în părțile anterioară și posterioară; când acest plan trece prin centrul de greutate al corpului, el este denumit frontal cardinal sau principal.
Dreptele de intersecție ale planelor sunt axele sistemelor de referință somatic considerat și sunt denumite astfel:
axa antero-posterioară (intersecția planelor sagital și transversal);
axa longitudinală ( intersecția planelor sagital și frontal);
axa latero-mediană (intersecția planelor frontal și transversal).
Unul dintre cele mai importante sisteme somatice este sistemul somatic pricipal , având originea în centrul de greutate al corpului și axele dirijate de-a lungul axelor sale principale de inerție. Reprezentarea sistemului somatic principal al corpului comportă anumite dificultăți legate de necesitatea cunoașterii pozițiilor tuturor părților corpului la orice moment, pentru a putea defini printr-un algoritm corespunzător direcțiile principale de inerție la momentul respectiv.
Din cauza acestor dificultăți reale de a preciza sistemul somatic principal, se poate recurge la divizarea corpului în două părți ale căror configurații individuale să poată fi considerate relativ mai stabile decât ale ansamblului. Astfel se poate realiza divizarea corpului în părțile sale superioară și inferioară și determinarea poziției centrelor de greutate pentru fiecare parte. Prima axă a sistemului de referință se va alege de-a lungul direcției determinată de centrele de greutate calculate. Originea sistemului de referință se află în centrul de greutate al ansamblului întregului corp care, de obicei, se află pe pelvis. A doua axă a sistemului de referință este dirijată de-a lungu axei latero-medială a pelvisului. A treia axă este determinată astfel ca, împreună cu primele două, să formeze un triedru drept.
10
Acest sistem nu evidențiază în mod satisfăcător mișcările de răsucire a corpului, putând să considere doar rotațiile solidare cu pelvisul, ceea ce realitatea infirmă prin existența unei game foarte diverse de răsuciri posibile ale corpului. Un alt dezavantaj al său constă în faptul că, în unele poziții, axele nu coincid cu direcțiile principale de inerție, ceea ce în studiul dinamic implică necesitatea calculării nu numai a momentelor de inerție axiale, ci și a celor centrifugale.
Dar principlalul aspect pozitiv, legat de acest mod de abordare a alegerii sistemelor de referință prin divizarea corpului, este acela că el a deschis calea spre conceptul de utilizare a câte unui sistem de referință propriu pentru fiecare parte a corpului uman aflată în mișcare, ceea ce complică puțin formalismul scrierii relațiilor corpului uman, dar simplifică algoritmul de calcul. Prin generalizare, se poate împărți corpul uman în atâtea părți considerate rigide câte sunt necesare pentru ca rezultatele să aibă relevanță științifică, adică să se poată descrie cu eroare cât mai mică mișcarea ansamblului sau a părților componente. În final, se poate ajunge la o structură suficient de complicată pentru a oferi rezultate satisfăcător de corecte.
Pentru a atașa unui corp rigid un sistem de referință propriu, se poate proceda în mai multe moduri.
Conform preceptelor cinematicii clasice se propune alegerea arbitrară a unui sistem de referință cartezian pentru care trebuie precizate: coordonatele originii (3 parametri scalari independenți) și 3 din cele 9 cosinusuri directoare ale versorilor axelor acestui sistem față de sistemul fix (alți 3 parametri scalari independenți); în total rezultă ca necesară și suficientă precizarea a 6 parametri scalari independenți ce caracterizează cele 6 grade de libertte ale unui corp rigid în mișcarea sa cea mai generală în spațiul 3D; un astfel de sistem de referință se poate plasa în orice punct aparținând corpului, având axele dirijate după direcții arbitrare, cu condiția să formeze un sistem triortogonal.
Conform preceptelor uzuale ale geometriei euclidiene ce precizează că poziția oricărui corp în spațiul 3D este geometric determinată dacă se cunosc pozițiile a 3 puncte necoliniare ce îi aparțin; distanța dintre cele 3 puncte trebuid să rămână constntă la modelul de solid rigid, rezultă și în acest caz 6 grade de liberate pentru corp ( din cele 3x3=9 coordonate ale celor 3 puncte se scad cele 3 relații ce exprimă constanța distanțelor, rezultând existența a 6 parametri scalari independenți); astfel, fiind cunoscute coordonatele celor 3 puncte necoliniare care precizează geometric poziția corpului, se pot determina vectorii de poziție care precizează geometric poziția corpului, definirea unui plan și versori direcțiilor.
11

Conform convețiilor utilizate în robotică, cea mai frecvent utilizată fiind convenția Denavitt-Hartenberg [15][30][36]. Aceasta este cea care se pretează optim la modelarea cinematică și dinamică a corpului uman, deoarece în structura sa se întâlnesc corpuri legate între ele în același mod ca și elementele unui robot. De fapt, evoluția acestui domeniu este oarecum ciudată deoarece roboții au apărut ca și creaturi tehnice cu forme și manifestări umanoide a căror realizare efectivă a presupus copierea funcțiilor corpului uman. După definirea modalităților de abordare matematică a acestor structuri mecanice umanoide, acestea se utilizează acum la modelarea organismului uman.
Indiferent de modul în care se aleg sistemele de referință atașate, este clar că trecerea de la un sistem de referință la altul se realizează printr-o succesiune de trnsformări omogene. În plus, toate mișcările diferitelor părți ale corpului pot fi în todeauna considerate ca diverse combinații de mișcări de translație și rotație cu axă fixă. De accea, este necesar să se studieze atât aceste mișcări simple ale corpului rigid, cât și ale mișcări mai complexe care se regăsesc în ansamblul de mișcări ale corpului uman.
2.2. Transformări omogene
Orice corp rigid poate fi perfect determinat în spațiul 3D dacă se cunos poziția originii și drecțiile axelor unui sistem de referință atașat acestuia ce reflectă exact mișcarea corpului și în raport cu care poziția oricărui punct ce îi aparține este dată de un vector de modul constant. Orice punct din corp este astfel simplu de precizat dacă se cunoaște sistemul de referință atașat reprezentat printr-o matrice de tip general G (2.1) în care primele trei coloane conțin cosinusurile directoare ale versorilor iar ultima coloană proiecțiile originii în raport cu un sistem fix [15][30][36].. Când corpul se mișcă, într-o mișcare generală de exemplu, sistemul de referință atașat își modifică poziția originii și orientarea axelor. Noua matrice G ce reprezintă poziția modificată a corpului va avea coloanele modificate datorită unei transalații și unei rotații generale și se va obține din matricea inițială prin aplicarea unei succesiuni de transformări de transalație și rotație exprimate prin matricea de transformare corespunzătoare. Este, deci, necesar să se stabilească matricea ce exprimă aceste transformări simple și care, înmulțite cu matricea generală ce reprezintă sistemul de referință atașat corpului în stare inițială, să permită exprimarea noii sale stări.
Matricea G de dimensiuni 4x4
12

G=[nx ox
ny oy
ax px
ay p y
nz oz
0 0az pz
0 1] (2.1)
exprimă de fapt poziția și orientarea unui corp față de un sistem de referință fix oarecare x0O 0 y0 z0, sistemul atașat confundându-se din punct de vedere matematic cu însuși corpul.
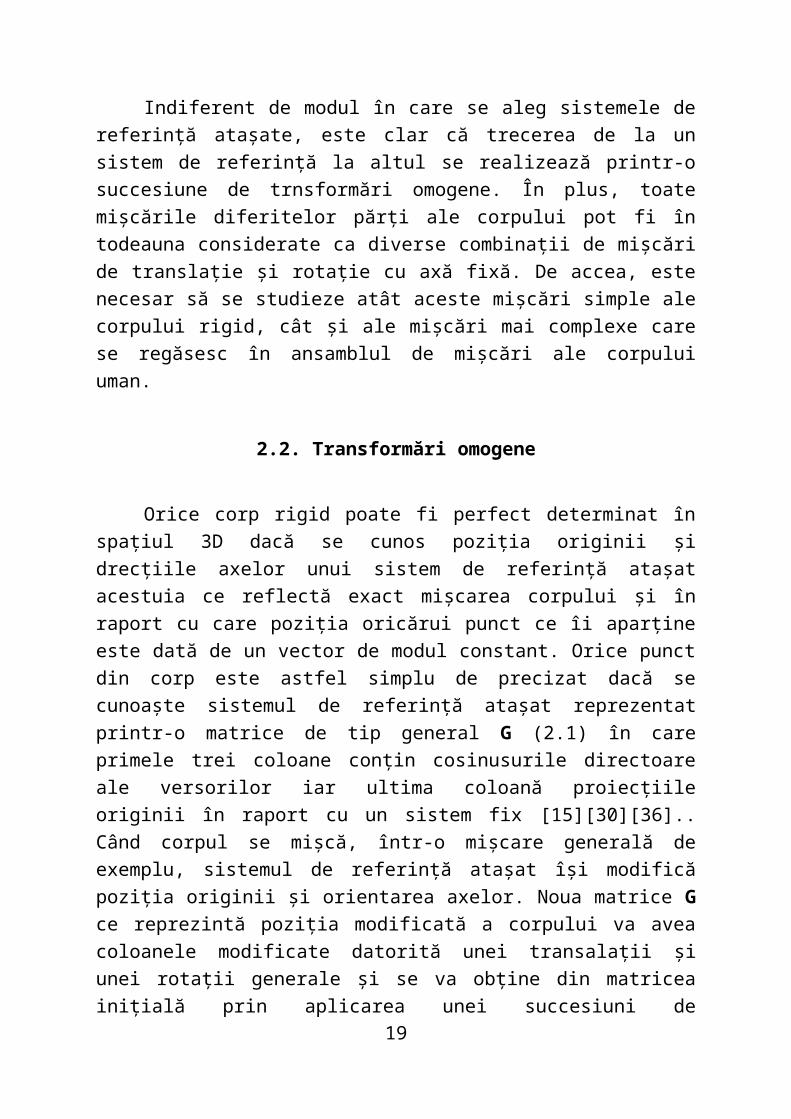
Supunând corpul unei transformări de transalație reprezentată de vectorul constant r10=x10 i+ y10 j+z10 k , axele sistemului său atașat vor rămâne paralele cu direcțiile lor inițiale, dar coordonatele originii sale se vor modifica prin adăugarea proiecțiilor vectorului constant r10 (fig.2)
Fig 2. Transformarea omogenă de translație
Astfel, matricea de transformare omogenă de transalație este de tip 4x4, având coloanele cosinusurilor directoare identice cu cele ale versorilor sistemului de referință fix, ultima coloană conținând proiecțiile vectorului de transalațier10:
T=[1 00 1
0 x10
0 y10
0 00 0
1 z10
0 1] (2.2)
13
A supune corpul unei translații, în sistemul de referință x0O 0 y0 z0, înseamnă a îmulți la stânga matricea sa de poziție cu matrice de transformare omogenă de translație. Poziția translatată a corpului este exprimată de matricea:
T ∙G=[1 00 1
0 x10
0 y10
0 00 0
1 z10
0 1]∙ [nx ox
n y o y
ax px
a y py
nz oz
0 0az pz
0 1]
T ∙G=[nx ox
ny oy
ax px+ x10
ay p y+ y10
nz oz
0 0az pz+z10
0 1]
(2.3)
Transformarea de rotație poate fi abordată în mai multe moduri distincte.
Rotația simplă de unghi θ în jurul unei axe a sistemului de referință, care se exprimă printr-o matrice 4x4 la care coloana ce exprimă versorul în jurul căruia se face rotația rămâne nemodificată, celelalte două coloane reprezentând versorii ortogonali pe aceasta rotiți cu unghiul θ față de direcția lor inițială. Coloana a patra are elemente nule pentru că transformarea de rotație afectează doar direcțiile axelor (fig.3).
Fig. 3 Transformarea omogenă de rotație în jurul axei O x a sistemului de referință
Cu aceste precizări, matricele de rotație simplă sunt:
în jurul axei O0 x0:
14
R(x , θ)=[1 00 cosθ
0 0−sinθ 0
0 sinθ0 0
cosθ 00 1
] (2.4)
în jurul axei O0 y0:
R( y , θ)=[ cosθ 00 1
sinθ 00 0
−sinθ 00 0
cosθ 00 1
] (2.5)
în jurul axei O0 z0:
R(z , θ)=[cosθ −sinθsinθ cosθ
0 00 0
0 00 0
1 00 1
] (2.6)
A supune corpul dat, respectiv sistemul său de referință atașat, unei rotații în jurul uneia dintre axele sistemului de referință x0O 0 y0 z0, înseamnă a îmulți la stânga matricea sa generală cu matrice de transformare omogenă corespunzătoare rotației respective. Spre exemplu, poziția rotită a corpului în jurul axei O x x0 este exprimată de:
R ( x , θ ) ∙G=[1 00 cosθ
0 0−sinθ 0
0 sinθ0 0
cosθ 00 1
] ∙[nx ox
ny oy
ax px
ay p y
nz oz
0 0az pz
0 1]=[ nx ox
n y cosθ−nz sinθ o y cosθ−oz sinθax px
ay cosθ−az sinθ py cosθ−pz sinθny sinθ+nz cosθ o y sinθ+oz cosθ
0 0a y sinθ+az cosθ p y sinθ+ pz cosθ
0 1](2.7)
Rotația generală, de unghi θ în jurul unei drepte oarecare (D), al cărei studiu apare ca necesar pentru că nu este întodeauna posibil să se studieze rotația unui corp doar în jurul axelor sistemului de referință. Se presupune cunoscut versorul dreptei (D) oarecare, cunoscând cosinusurile sale directoare în raport cu un sistem de referință fix exprimat prin matricea generală S (fig.4). Fără a restrânge generalitatea problemei, axa de rotație se poate considera ca fiind axa O' z ' a unui alt sistem de referință concurent cu cel inițial și exprimat printr-o matrice S'. Astfel, versorul dreptei (D) va avea forma corespunzătoare din matricea generală:a=ax i+a y j+az k.
15

Fig.4 Transformarea de rotație generalăOriginile celor două repere fiind suprapuse, se poate presupune că
sistemul S' se obține din S printr-o transformare de rotație generală Rg, ceea ce revine la a scrie:
S'=Rg ∙ S (2.8)în care Rg este o matrice 4x4 provenită din matricea generală G din din care se rețin doar coloanele cosinusurilir directoare:
Rg=[nx ox
n y o y
ax 0a y 0
nz oz
0 0az 00 1
] (2.9)
coloan a treia având drept element proiecțiile versorului a al axei O' z '.Se presupune că în sistemul de referință S se află un corp al cărui sistem
de referință atașat este dat de matricea C. Este evident că același corp, față de reperul S', se va exprima printr-o matrice C ', astfel încât:
S ∙C=S ' C' (2.10)Ținând seama de relația (1.45), [2.8], rezultă:C=RgC '. Este evident că
rotirea corpului C, în jurul dreptei (D) în sistemul de referință S, reprezintă aceeași acțiune ca și rotirea corpului C ', în jurul axei O' z ' a sistemului de referință S':
S ∙ R ( D , θ ) ∙C=S' ∙ R (z' , θ)∙ C' (2.11) Rezultă astfel expresia matricei de rotație oarecare:
R ( D ,θ )=Rg ∙ R(z ' ,θ) ∙Rg−1 (2.12)
Înlocuind matricele și observând că:
16

produsul scalar între oricare două linii sau două coloane ale matricei Rg este nul, pentru că versorii respectivi sunt ortogonali,
produsul scalar al oricărei linii sau al oricărei coloane prin ea însăși este 1 pentru că elementele respective ale matricei sunt cosinusuri directoare,
versorii matricei S' formează un sistem triortogonal, rezultă matricea de rotație oarecare:
R (d ,θ )=¿ [ax2 (1-cosθ )+cosθ ax ay (1-cosθ) -az sinθ
ax ay (1-cosθ ) +az sinθ ay2 (1-cosθ) +cosθ
ax az (1-cosθ) +a y sinθ 0ay az (1-cosθ) -ax sinθ 0
ax az (1-cosθ) -ay sinθ ay az (1-cosθ ) +a xsinθ0 0
az2 (1-cosθ ) +cos θ 0
0 1] (2.13)
Oricare dintre matricele de rotație simplă se pot obține din matrice de rotație generală, prin particularizarea corespunzătoare a proiecțiilor versorului a. Astfel, pentru a obține matricea de rotație în jurul axei Oy se considerăax =az =0 și a y=1.
2.3. Convenția DENAVITT-HARTENBERG
Pentru a concepe modelele cinematice în biomecanică este necesară acceptarea ipotezei simplificatoare că un corp uman este un ansamblu sistemic structurat din corpuri perfect rigide legate prin cuple simple, în principal de rotație, ce permit, ca unică mișcare principală, rotația cu axă fixă având un singur grad de libertate. Articulațiile ce realizează o astfel de mișcare se numesc articulații cilindrice (de exemplu: articulațiile interfalangiene). Există însă și articulații sferice ce permit rotația în jurul unui punct fix, caracterizat prin 3 grade de libertate (de exemplu articulațiile: șoldului, umărului, gleznei, mâinii). Orice combinație de mișcări permise de articulații (plană, sferică, rototranslație etc.) poate fi modelată prin suprapunerea unor cuple simple corespunzătoare. Astfel, articulația sferică (de rotație cu punct fix) poate fi considerată ca o suprapunere a trei articulații cilindrice, axele respective de rotație formând un sistem triortogonal. Articulația ce permite două rotații distincte poate fi considerată ca o suprapunere de două articulații cilindrice cu axele perpendiculare.
În afară de mișcarea principală de rotație, în articulații pot avea loc aluncări ce se modelează prin translații curbilinii sau, uneori, prin mișcări plan-paralele. În modelarea biomecanică a ansamblului corpului uman, sau a aparatelor sale, se consideră însă legăturile asigurate în principal prin cuple simple de rotație, mișcările suplimentare menționate nefiind esențiale în stabilirea legilor de mișcare a extremităților. Aceste mișcări apar datorită unei geometri specifice fiecărei articulații, dându-i acesteia caracterul care o
17

difernțiază de o altă articulație cu număr identic de grade de libertate și evidențiind rolul său particular în ansamblul corpului uman. Sunt aspecte speciale și de finețe a mișcărilor, produse de particularități anatomice, care nu au neapărat un rol în modelarea mecanică a structurii ansamblului.
Fiecărei cuple i se asociază o singură variabilă articulară q reprezentată de unghiul de rotație θ în jurul axei respective sau deplasarea d de-a lungul axei cuplei. Corpurile din sistem și cuplele care le leagă formează, la corpul uman, lanțuri cinematice deschise sau închise, după tipurile de mișcări sau de posturi în care se află pe parcursul acestora.
Astfel conceptul ca o succesiune de corpuri legate între ele prin cuple ce le permit mișcări relative, orice sistem reprezentat de corpul uman în ansamblu sau de porțiuni ale sale (aparatele acestuia) poate fi aborat, din punct de vedere cinematic, ca o succesiune de sisteme de referință atașate componentelor. Fiecare din aceste sisteme este perfect exprimat printr-o matrice de tip general G, fie față de reperul precedent din succesiunea de corpuri, fie față de reperul fix.
Se consideră ansamblul realizat din n corpuri rigide succesive legate prin n cuple simple de rotație. Problema principală a modelării matematice este exprimarea matricei generale Gn ce precizează poziția și orientarea ultimului corp al lanțului față de reperul fix, prin intermediul unei succesiuni de matrice ce poziționează fiecare corp de precedentul. Astel între reperele atașate corpului i−1 și i, legătura este asigurată printr-o matrice de transfer notată T i❑
i−1
,care are în todeauna forma unei matrice generale în care mărime dependentă de timp este variabila cuplei i.
Poziția corpului i față de sistemul de referință în raport cu care se studiază mișcarea, considerat corpul 0 al lanșului cinematic, se va exprima, deci, prin produsul matricelor de transfer corespunzătoare tuturor sistemelor de referință atașate corpurilor, de la 0 la i:
Gi= T 1∙❑0 T2❑
0 … T i❑i−1 (2.14)
în care apar toate variabile articulare de la q1 la q i. Corpul final n din succesiune va fi exprimat, față de bază, prin matricea:
Gn= T 1 ∙❑0 T2❑
0 … Tn❑n−1 (2.15)
Exprimarea matricelor de transfer se poate realiza în mai multe moduri, funcție de convențiile adoptate pentru modelarea corpului din sistemul analizat și precizarea sistemului de referință atșate acestora. Cea mai răspândită este convenția Denavitt-Hartenberg care pornește de la următoarele condiții.
18
Numărul corpurilor începe de la cel considerat bază la cel final (de la stânga la dreapta). Astfel baza este corpul 0 și nu este considerată ca făcând parte dintre corpurile sistemului.
Fiecare corp are numărul cuplei plasată la stânga sa, care îi imprimă și mișcarea. Astfel corpul i are la stânga cupla i și la dreapta cupla i+1. Ultima cuplă a sistemului modelat este cea cu numărul n, situată la stânga corpului final. La dreapta acestui corp nu mai există cuplă.
Fiecare corp i al lanțului, ce are rolul strict de a asigura legătura dintre cuplele de la capetele sale, este caracterizat prin două mărimi gemometrice (fig. 5):
lungimea Li, reprezentată de distanța între axele cuplelor respective și măsurată pe perpendiculara comună pe axele cuplelor i și i+1;
unghiul de răsucire α i, reprezentat de unghiul dintre axele cuplelor de la capete.
Fig.5. Axele și mărimile geometrice ale sistemului
19

Pe axa cuplei oarecare i se află picioarele a două perpendiculare: perpendiculara comună axelor i−1 și i; perpendiculara comună axelor i și i+1;
Poziția relativă a corpurilor i−1 și i este precizată prin: distanța d i măsurată pe axa cuplei i−1 între perpendicularele
comune pe axele (i−1 , i) și respectiv (i ,i+1); unghiul θi dintre cele două perpendiculare, măsurat în plan
perpendicular pe axa cuplei i. Sistemul de referință atașat corpului i, trebuie să reflecte poziția acestuia
la orice moment, se plasează pe axa cuplei i+1. Modul de amplasare diferă în funcție de natura cuplei i, adică de caracterul mișcării imprimate de acesta corpului considerat.
Sistemul de referință S0, atașat bazei, se plasează pe axa cuplei 1 și reprezintă reperul fix, atunci S0 se exprimă față de aceasta preintr-o matrice generală cu elemente constnte.
De regulă, sistemul de refrință Sn, atașat corpului final, este plasat pe axa corpului n împreună cu sistemul atașat corpului n−1. Dacă ultimul corp din sistem este în mod artificial prelungit cu un alt corp cu care este legat rigid (de exemplu o proteză de deget care este rigid legată de ultima falangă activă) și trebuie evidențiat separat, atunci la extremitatea din dreapta a corpului n se plasează un reper legat de Sn printr-o matrice generală cu elemente constante.Considerând corpul i legat de corpul i-1 prin cupa simplă de rotație i, variabila articulată aferentă este unghiul θ (fig.6).
20
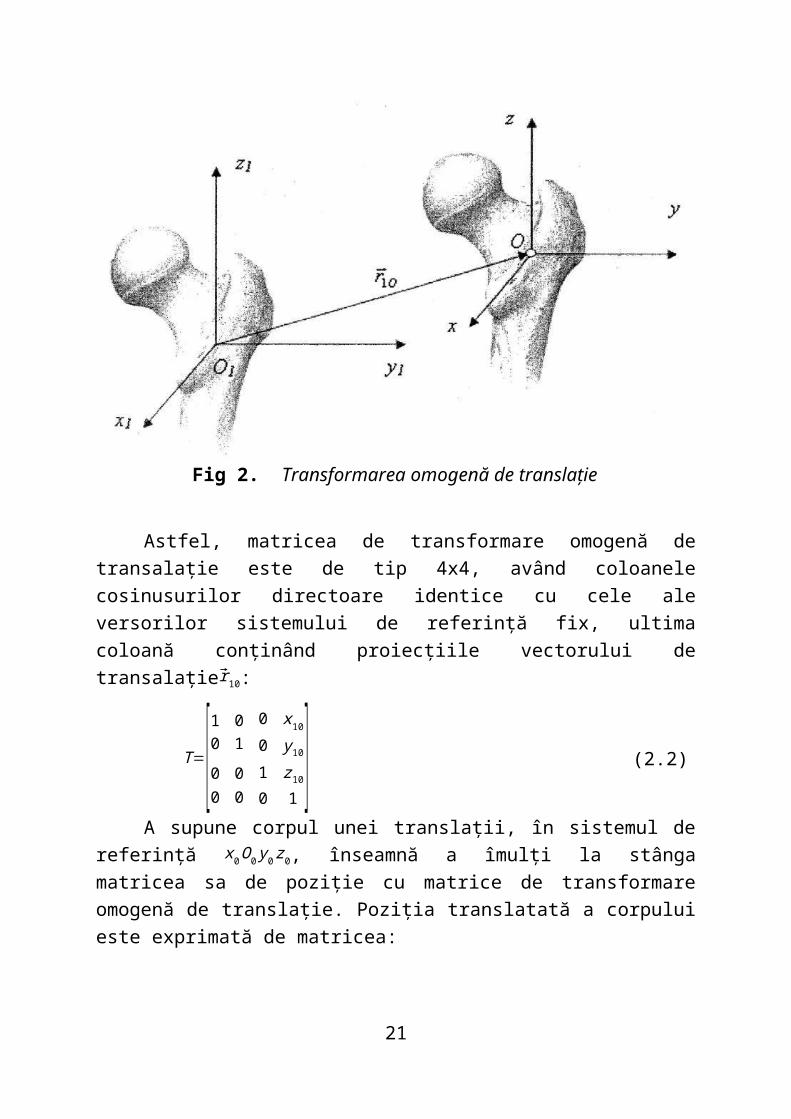
Fig.6 Alegera sistemului de referință atașat corpului legat prin cuplă de rotație
Sistemul de referință Si atașat corpului i se alege astfel:
Originea Oi a reperului este punctul de intersecție dintre axa cuplei i+1 și perpendiculara comună pe axele cuplelor i−1 și i. În cazul în care aceste axe sunt concurente, originea Oi se poate elege în punctul de concurență. Când axele sunt paralele sau coliniare, originea reperului se alege astfel ca d i=0.
Axele sistemului atașat se alege astfel: axa Oi zi se suprapune peste axa cuplei i+1; sensul său pozitiv este
dat de sensul de creștere a unghiului θi; axa Oi x i are direcția perpendicularei comune pe axele cuplelor i și
i+1 (care sunt axele Oi−1 zi−1 respectivOi zi). Sensul său pozitiv este sensul produsului vectorial al versorului celor două axe. Aceași observație este valabilă dacă axele Oi−1 zi−1 și Oi zi sunt concurente. Dacă axele cuplelor i și i+1 sunt paralele sau coliniare, axa Oi x i se alege perpendiculară pe planul determinat de cele două direcții
21

paralele, respectiv pe direcția lor comună, cu sensul astfel precizat pentru ca trecera de la un reper la altul să se realizeze cât mai simplu;
axa Oi y i are direcția și sensul necesare pentru ca triedrul Si să fie drept.
Ținând seama de aceste precizări convenționale, rezultă că sistemul de referință atașat corpului i se obține din sistemul atașat corpului i−1, de care este legat prin cupla simplă de rotație i, prin următoarea succesiune de transformări:
o rotație de unghi θi, în jurul axei Oi−1 zi−1 ; o translație de mărimea d i de-alungul axei Oi−1 zi−1; o translație de mărime Li de-alungul axei Oi x i; o rotație de unghi α i în jurul axei Oi x i.
Astfel:
T i =[cosθi -sin θi
sin θi cosθi
0 00 0
0 00 0
1 00 1
]❑
i-1
∙[ 1 00 1
0 00 0
0 0 0 0
1 di
0 1] ∙[ 1 0
0 10 Li
0 0 0 0 0 0
1 00 1
] ∙[1 00 cos αi
0 0−sin αi 0
0 sin αi
0 0cosα i 0
0 1] (2.1
6)
matrice de transfer, ce precizează reperul Si, se obține prin produsul matricelor care reprezintă transformările omogene menționate în ordinea respectivă de la stînga la dreapta:
T i=[cosθi −sin θi cosα i
sin θi cosθi cosα i
sin θ isin α i Li cosθi
−cosθ isin αi Li sin θi
0 sin α i
0 0cosα i d i
0 1]
❑
i−1
(2.17)
Este evident că în matrice de transfer (2.17) singura mărime variabilă în funcție de timp este unghiul de rotație θi, toți ceilalți parametri gemometrici d i, Li și α i fiind mărimi constante.
Considerând corpul i legat de corpul i−1 prin cupla simplă de translație i, variabila articulată aferentă este distanța d i. Matricea de transfer se stabilește în mod similar, urmărind aceeași modalitate de trecere de la un sistem de referință la următorul. Ținând însă seama de propietatea mișcării de translație care precizează că toate punctele corpului ce execută o astfel de mișcare sunt identice din punct de vedere cinematic (au aceași lege de mișcare, aceeași viteză și aceeași accelerație la același moment al mișcării), este evident că se poate preciza sistemul de referință Si în orice punct al corpului i. Astfel, se poate simplifica matrice de transfer (2.18) prin anularea lungimi Li a corpului respectiv, expresia sa devenind:
22

T i=[cosθi −sin θi cosα i
sin θi cosθi cosα i
sin θ isin α i 0−cosθ isin αi 0
0 sin α i
0 0cos αi d i
0 1]
❑
i−1
(2.18)
Descriind trecerea de la un reper la altul prin intermediul unei cuple de translație, în matrice de transfer (2.18) singura mărime variabilă în funcție de timp este deplasarea d i, parametri geometrici θi și α i fiind mărimi constante.
Capitolul 3. Modelul cinematic3.1. Cazul general
Modelarea cinematică a unui sistem de corpuri implică:
alegerea sistemelor de referință atașate corpurilor care îl compun; scrierea matricelor de transfer; îmulțirea matricelor de transfer de la stânga spre dreapta sau de la dreapta
spre stânga, conform relației (2.15); dacă îmulțirea se face de la stânga spre dreapta atunci produsele parțiale reprezintă, pe rând, poziția și orientarea fiecărui corp din sistem față de bază; dacă îmulțirea se face de la dreapta spre stânga, atunci produsele parțiale reprezintă, pe rând, poziția și orientarea fiecărui corp din sistem față de corpul final al lanțului cinematic; indiferent de sensul în care se îmulțesc matricele, produsul (2.15) exprimă orientarea și poziția sistemului atașat corpului final față de bază [15][30][36].
Astfel, după calcularea matricei Gn, se identifică elementele sale cu cele din forma generală (2.1), obținându-se ecuațiile cinematice ale sistemului de corpuri studiat. Acesta se reprezintă, deci, sub forma unui sistem de 11 ecuații scalare și materializează modelul cinematic direct al sistemului de corpuri
nx=nx (q1 ,…qn)n y=ny (q1 , …qn)nz=nz(q1 , …qn)ox=ox(q1 , …qn)o y=o y (q1 ,…qn)oz=oz(q1 ,…qn)ax=ax (q1 ,…qn)a y=a y (q1 , …qn)az=az(q1 , …qn)
(3.1)
23
px=px (q1 ,…qn)py=p y (q1 ,…qn)pz=pz(q1 , …qn)
Modelarea cinematică directă conduce întodeauna la soluție unică întrucât, pentru valori bine precizate ale variabilelor articulare, se obține o poziție bine precizată în spațiu a sistemului mecanic descris de ecuațiile (3.1).
Nu aceeași afirmație se poate face despre modelul cinematic invers, care este reprezentat de sistemul de n ecuații ce exprimă variabilele articulare în funcție de poziția și orientarea sistemului atașat corpului final din lanțul cinematic:
q1=q2 (nx , …, pz )⁞
q i=q i ( nx ,…, pz )⁞
qn=qn ( nx , …, pz )
(3.2)
Sistemul (3.2) nu are, în general, soluție unică deoarece multe dintre configurațiile lanțurilor cinematice ce alcătuiesc modelul corpului uman pot fi atinse în diverse combinații de valori pentru variabile articulare. Se pot, de asemenea, obține soluții nedeterminate pentru anumite variabile articulre, situație în care se consideră modelul cinematic respectiv este degenerat.
Modelul cinematic invers se obține prin rezolvarea ecuațiilor cinematice (3.2), principiul constând în identificarea printre ecuațiile cinematice pe acele din care se pot determina direct anumite variabile articulare. Expresiile prea complicate nu mai pot fi utilizate ca atare pentru că ar fi mult prea dificilă rezolvarea unor astfel de ecuații trigonometrice. În acest caz se procedează la îmulțirea la stânga pe rând a matricei Gn în forma sa generală (2.1) cu inversele matricelor de transfer, începând cu T 1
−1❑0 .
Se obține pe rând ecuații matriciale la care membrul stâng apar ca mărimi cunoscute parametrii ce exprimă poziția și orientarea sistemului atașat corpului final din lanțul cinematic, iar în membrul drept se află parametrii articulari necunoascuți ce trebuie determinați sub forma (3.2):
T 1−1
❑0 ∙Gn= T 2⋯❑
1 T n❑n−1
T 2−1
❑0 ∙ T 1
−1❑0 ∙ Gn= T 3 ∙ T 4⋯❑
3❑2 T n❑
n−1
⋮T n−1
−1❑
n−2 ∙ T 1−1
❑0 ∙Gn= T n❑
n−1
(3.3)
În aceste ecuații se identifică elementele cele mai favorabile din punct de vedere al simplității expresiilor lor, iar din egalitățile astfel create se determină variabilele articulte q i. Numai experiența în rezolvarea unor astfel de probleme pot conduce la alegerea celei mai simple variante.
24

Rezolvarea problemei geometrice inverse poate conduce la diferite situații:
absența soluției, dacă poziția și orientarea corpului final se află în afara spațiului anatomic descris de extremitatea sa;
o infinitate de soluții, în cazul în care corpul final fie este redundant în raport cu mișcarea pe care o efectuează, fie se află într-o configurație singulară când nu poate executa anumite mișcări;
un număr finit de soluții, dacă toate variabilele ariculare se pot calcula fără ambiguitate.
3.2. Modelarea cinematică a membrului inferior3.2.1.Considerații anatomice
Scheletul membrului inferior este format din centura pelviană și scheletul membrului inferior liber, reprezentând o serie de particularități, imprimate de trecerea la ortostatism și de locomoție bipedă.
Centura pelviană conține osul coxal, format la rândul său din trei oase: ileonul în partea superioară, pubisul plasat anterior și ischionul plasat posterior. Ultimile două oase coxale se articulează anterior formând simfiza pubiană. Acest ansamblu se articulează posterior cu osul sacru formând articulația sacroiliacă (fig.7).
25

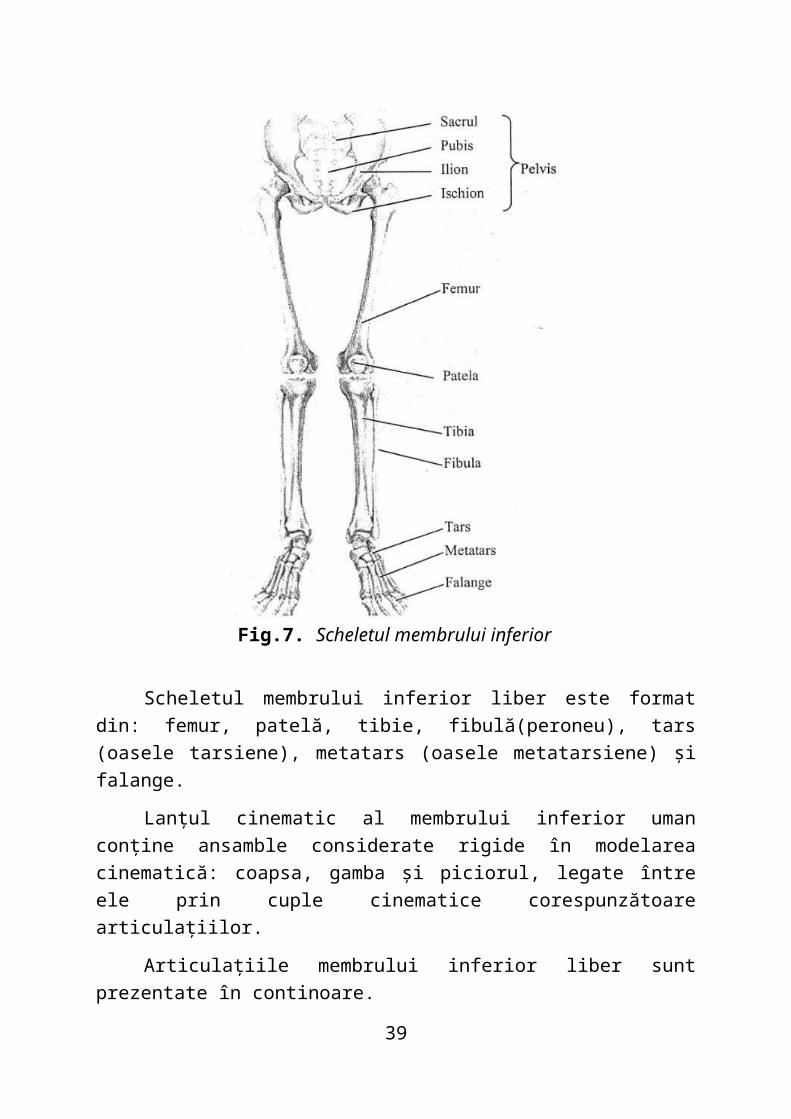
Fig.7. Scheletul membrului inferior
Scheletul membrului inferior liber este format din: femur, patelă, tibie, fibulă(peroneu), tars (oasele tarsiene), metatars (oasele metatarsiene) și falange.
Lanțul cinematic al membrului inferior uman conține ansamble considerate rigide în modelarea cinematică: coapsa, gamba și piciorul, legate între ele prin cuple cinematice corespunzătoare articulațiilor.
Articulațiile membrului inferior liber sunt prezentate în continoare.
Articulațiile piciorului
În principal sunt: articulația talocrurală (trohleană) și articulația talotarsală ce conține ca articulații secundare articulațiile tarsului posterior (subtalară, talocalcaneonaviculară și calcaneocuboidiană ce funcționează solidar) și articulațiile tarsului anterior care au rol doar de a asigura elasticitatea tarsului și în care singurele mișcări posibile sunt alunecările (fără rol în modelarea cinematică a membrului inferior).
26

Articulația talocrurală
Permite mișcări de flexie dorsală-plantară (flexie-extensie), fiind o articulație cilindrică a cărei axă fixă trece aproximativ prin vârful celor două maleole (fig.8). De fapt, axa intră sub vârful maleolei mediale, trece prin corpul talusului și iese prin vârful maleolei laterale. Prin flexia dorsală (flexia), fața dorsală a piciorului se apropie de cea anterioară a gambei. Prin flexia plantară (extensia) fața dorsală a piciorului se îndepărtează de gambă. Amplitudinea celor două mișcări este de 60-80º.
Fig.8 Axa de rotație a articulației talocrurale
Flexia este limitată de posibilitățile de întindere a fasciculelor posterioare ale ligamentelor colaterale si tendonului lui Ahile, precum și de întâlnirea colului talusului cu marginea anterioară a scoabei gambiere. În poziția de flexie maximă, trohleea este strânsă și imobilizată în scoaba tibiofibulară, datorită întinderii ligamentelor colaterale. În timpul execuției flexiei, acesteia i se asociază mișcări reduse de oscilație laterală tibială și/sau fibulară. Este foarte important de precizat rolul talusului în timpul flexiei, rol care conduce la o anumită posibilitate de simplificare a modelului cinematic al membrului inferior. Astfel, prin solidarizarea realizată între talus și oasele tarsului, flexia-extensia se produc în articulația talocrurală, între talus și gambă.
27
Extensia este limitată de posibilitățile de întindere ale fasciculelor anterioare ale ligamentelor colaterale, oprindu-se la întâlnirea procesului posterior al talusului cu marginea posterioară a scoabei tibio-fibulare. Pe măsură ce piciorul execută flexie plantară și trohleea se îngustează, mișcărilor principale de flexie-extensie li se asociază și mișcări foarte reduse de oscilație laterală tibială sau fibulară.
Articulația talotarsală
Deși formată din articulații independente anatomic, se comportă unitar din punct de vedere biomecanic. Mișcarea rezultată în acest ansamblu de articulații este o rotație în jurul unei axe ce trece prin colul talusului și un punct situat în apropierea trohleei fibulare a calcaneului (fig.9). Axa de rotație nefiind fixă, mișcările ce se produc pot fi asamblate, în funcție de poziția sa la anumite faze ale mersului, sub denumirea de inversie (răsturnarea spre interior), rspectiv eversie (răsturnarea spre exterior).
Inversia este o combinație adducție-supinație-extensie, iar eversia conține abducția-pronația-flexia [39]. În aceste condiții adducția este mișcarea în cursul căreia vârful haluceului se apropie de planul medio-sagital al corpului, iar abducția se produce în sens contrar. Prin execuția alternativă a acestor două mișcări, vârful haluceului descrie un cerc, mișcarea respectivă fiind numită circumducție. Perechea de mișcări supinație-pronație realizează înclinarea feței plantare față de marginile sale. În timpul pronației, marginea medială părăsește solul iar fața plantară se orientează spre exterior.
28
Fig.9. Axa de rotație a articulațiilor tarsului posterior
Combinațiile menționate nu sunt neapărat obligatorii. Astfel, flexia nu se produce obligatoriu simultan cu abducția și pronația, ci o extensie puternică poate fi la rândul său însoțită de ansamblul abducție-pronație. În mișcările de supinație-pronație și abducție-adducție, talusul se solidarizează de oasele gambei, mișcările respective producându-se între ele și celelalte oase ale piciorului.
În modelul cinematic se consideră articulația talocrurală reprezentată ca o cuplă simplă de rotație, cea tarotarsală luându-se în considerare tot ca o cuplă de același tip într-un model mai complex și real, dar putându-se neglija la un model simplificat.
Articulațiile degetelor
Cuprind articulațiile metatarsofalangiene și interfalangiene . În articulațiile degetelor se produc mișcări de flexie-extensie, ca mișcări principale, flexia fiind mai amplă decât extensia la ambele categorii de articulații ale degetelor. La articulațiile metatarsofalangiene flexia este însoțită de adducție, abducția fiind posibilă doar când degetele sunt întinse. La articulațiile interfalangiene mișcările de flexie-extensie sunt mai libere între
29

falangele proximale și mijlocii decât între cele mijlocii și distale. Ca mișcări secundare, la aceste articulații sunt abducția-adducția și rotația. În modelarea cinematică a modelului inferior liber, articulațiile interfalangiene se neglijează, ultima articulație în lanțul cinematic considerându-se o articulație cilindrică unica rezultată prin asamblarea articulațiilor tetatarsofalagiene.
Oasele membrului inferior și articulațiile sale formează în cursul diferitelor poziții și mișcări un lanț cinematic ce se comportă uneori ca lanț închis în următoarele poziții și mișcări: susținerea corpului în poziția ortostatică, stînd pe genuchi sau șezând, propulsia corpului în sus, înainte sau înapoi, căderea la sol. Membrul inferior se comportă ca lanț cinematic deschis în toate mișcările ce realizează ciclul de mers, în lovirea-împingerea cu piciorul și,în cazuri speciale, chiar apucarea cu piciorul.
Întrucât mișcările uzuale ale membrului inferior sunt cele în care acesta apare ca lanț cinematic deschis, modelarea cinematică se realizează doar pentru acest caz.
3.2.2. Modelul cinematic complet al membrului inferior liber
Pentru studiul cinematic complet al membrului inferior uman liber, privit mai ales din punct de vedere al mersului și alergării, se consideră o structură în lanț cinematic deschis cu 10 grade de libertate. Toate legăturile între corpurile lanțului sunt asigurate prin cuple simple de rotație, parametrul articular variabil fiind unghiul de rotație θ, celelalte mărimi geometrice în conformitate cu convenția Denavitt-Hartenberg fiind constante [52].
Se consideră la membrul inferior doar patru articulații: coxofemurală modelată ca o articulație sferică cu 3 grade de liberate, a genuchiului modelată ca o articulție sferică cu 3 grade de liberate, a gleznei modelată ca o articulație sferică cu 3 grade de liberate și cea metatarsofalangiană modelată ca o articulație cilindrică unică. Structura adoptată este reprezentată în figura 10 , toate articulațiile avînd ca variabile unghiurile de rotație. Se consideră sistemul de referință fix xo Oo y0 z0 cu originea în punctul situat la jumătatea lățimii bazinului. Celelalte sisteme sunt plasate în articulații având originile distanțate în funcție de dimensiunile anatomice [18].
30
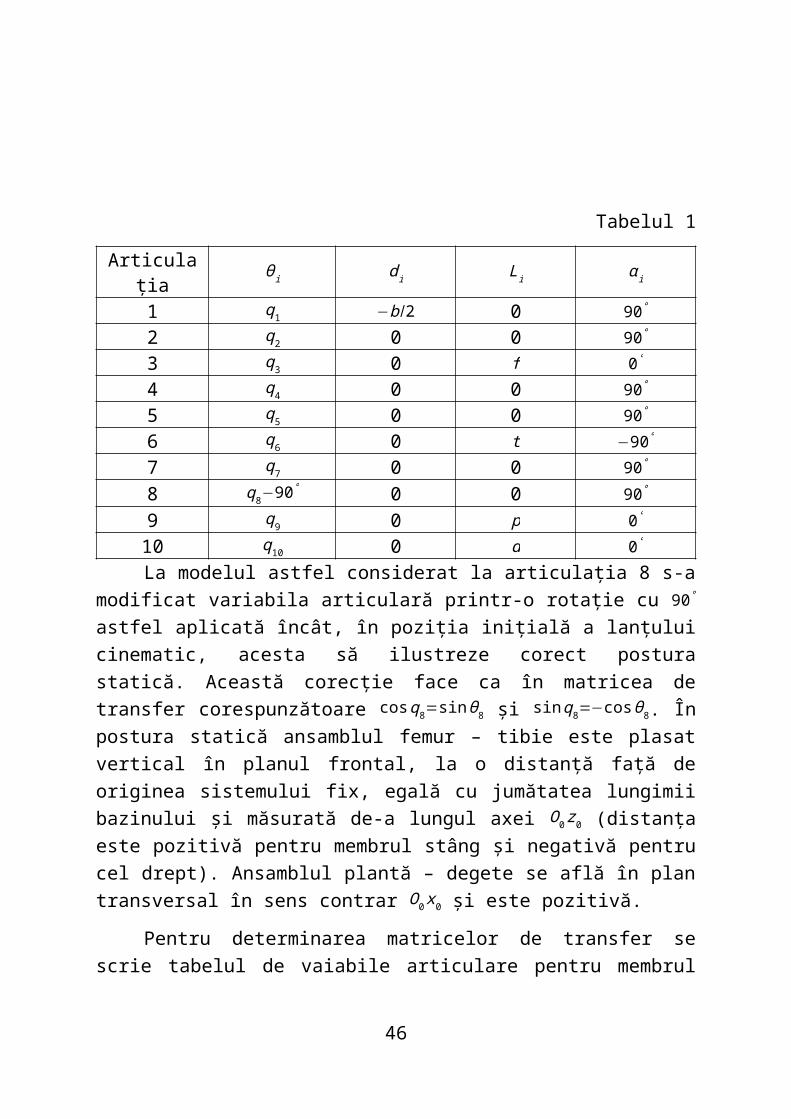
Tabelul 1
Articulația θi d i Li α i
1 q1 −b /2 0 90°
2 q2 0 0 90°
3 q3 0 f 0°
4 q4 0 0 90°
5 q5 0 0 90°
6 q6 0 t −90°
7 q7 0 0 90°
8 q8−90° 0 0 90°
9 q9 0 p 0°
10 q10 0 d 0°
La modelul astfel considerat la articulația 8 s-a modificat variabila articulară printr-o rotație cu 90° astfel aplicată încât, în poziția inițială a lanțului cinematic, acesta să ilustreze corect postura statică. Această corecție face ca în matricea de transfer corespunzătoare cos q8=sinθ8 și sin q8=−cos θ8. În postura statică ansamblul femur – tibie este plasat vertical în planul frontal, la o distanță față de originea sistemului fix, egală cu jumătatea lungimii bazinului și măsurată de-a lungul axei O0 z0 (distanța este pozitivă pentru membrul stâng și negativă pentru cel drept). Ansamblul plantă – degete se află în plan transversal în sens contrar O0 x0 și este pozitivă.
Pentru determinarea matricelor de transfer se scrie tabelul de vaiabile articulare pentru membrul inferior drept (tabelul 1) în concordanță cu figura 10.
31

Fig.10. Modelul cinematic complet al membrului inferior liber.Notațiile din figura 10 și tabelul 1 se referă la mărimile anatomice
caracteristice modelului:
f =¿ lungimea femurului; t=¿ lungimea tibiei; p=¿ lungimea plantei (cumulând lungimile tars-metatars); d=¿ lungimea cumulată a falangelor; b=¿ lungimea bazinului (osului sacru).
Matrice de transfer de la un sistem de referință la cel precedent s-au obținut pe baza expresiei generale (2.17):
32
T1= [ cos θ1 0sin θ1 0
sin θ1 0- cosθ1 0
0 10 0
0 -b/20 1
]❑
0
(3.4)
T2= [ cosθ2 0sinθ2 0
sinθ2 0-cosθ2 0
0 10 0
0 00 1
]❑
1
T 3=[cosθ3 −sinθ3
sin θ3 cos θ3
0 fcos θ3
0 f sin θ3
0 00 0
1 00 1
]❑
2
T 4=[cosθ4 0sin θ4 0
sin θ4 0−cos θ4 0
0 10 0
0 00 1
]❑
3
T 5=[cosθ5 0sin θ5 0
sin θ5 0−cos θ5 0
0 10 0
0 00 1
]❑
4
T 6=[cosθ6 0sin θ6 0
sin θ6 tcosθ6
cosθ6 tsinθ6
0 −10 0
1 00 1
]❑
5
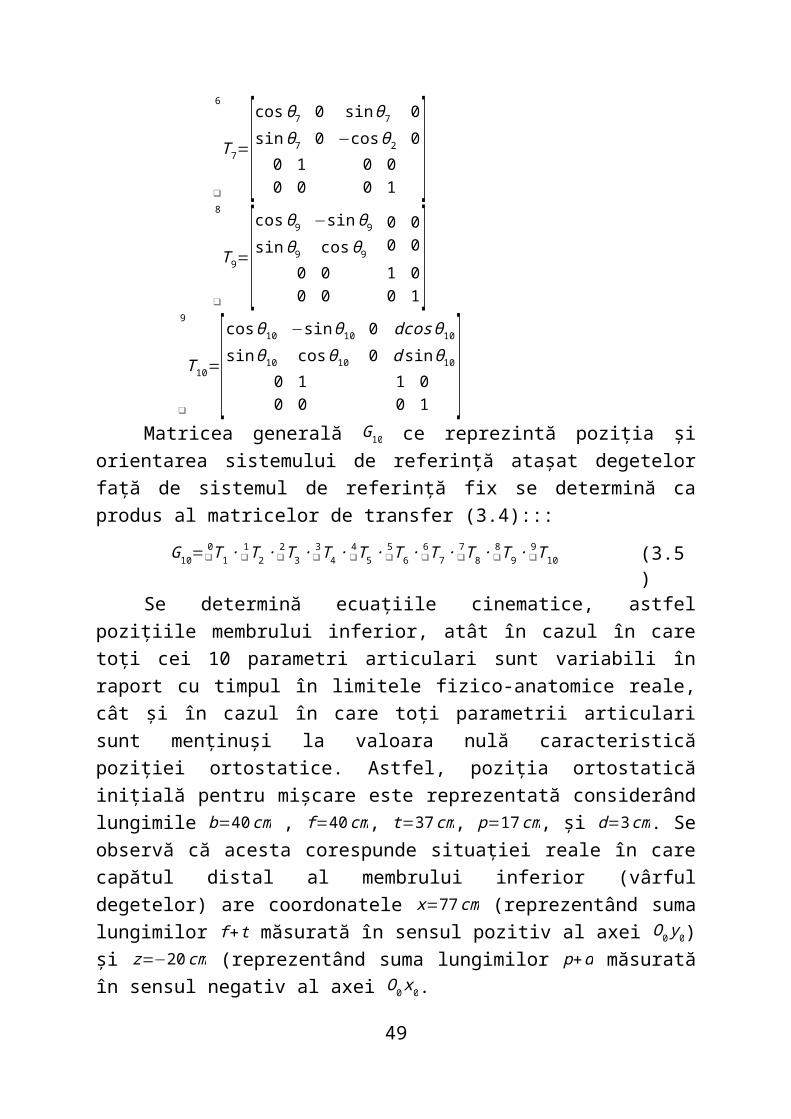
T 7=[cosθ7 0sin θ7 0
sinθ7 0−cosθ2 0
0 10 0
0 00 1
]❑
6
T 9=[cosθ9 −sin θ9
sin θ9 cosθ9
0 00 0
0 00 0
1 00 1
]❑
8
T 10=[cos θ10 −sin θ10
sinθ10 cosθ10
0 dcosθ10
0 d sin θ10
0 10 0
1 00 1
]❑
9
Matricea generală G10 ce reprezintă poziția și orientarea sistemului de referință atașat degetelor față de sistemul de referință fix se determină ca produs al matricelor de transfer (3.4):::
33

G10= T 1 ∙❑0 T 2 ∙ T 3∙ T 4 ∙ T5 ∙ T 6 ∙ T 7 ∙ T 8 ∙ T 9 ∙ T 10❑
9❑8
❑7
❑6
❑5
❑4
❑3
❑2
❑1 (3.5)
Se determină ecuațiile cinematice, astfel pozițiile membrului inferior, atât în cazul în care toți cei 10 parametri articulari sunt variabili în raport cu timpul în limitele fizico-anatomice reale, cât și în cazul în care toți parametrii articulari sunt menținuși la valoara nulă caracteristică poziției ortostatice. Astfel, poziția ortostatică inițială pentru mișcare este reprezentată considerând lungimile b=40 cm , f =40 cm, t=37 cm, p=17 cm, și d=3cm. Se observă că acesta corespunde situației reale în care capătul distal al membrului inferior (vârful degetelor) are coordonatele x=77 cm (reprezentând suma lungimilor f +t măsurată în sensul pozitiv al axei O0 y0) și z=−20 cm (reprezentând suma lungimilor p+d măsurată în sensul negativ al axei O0 x0.
Dacă toate cuplele cinematice execută mișcări simultane în intervalele unghiulare permise de configurația articulațiilor, extremitatea piciorului descrie un spațiu denumit activ, în interiorul căruia se va găsi în permanență membrul inferio, indiferen de mișcarea executată. Dacă modelul este corect, aceste mișcări trebuie să respecte limitele impuse variabilelor articulare, și astfel să rezulte o comportare cât mai naturală.
3.2.3. Modelul cinematic redus al membrului inferior
Pentru studiul cinematic simplificat am membrului inferior uman liber se consideră o structură în lan cinematic deschis cu 4 grade de liberate, care neglijează mișcările care nu au un rol foarte important în mers. Astfel, se consideră membrul inferior liber cele patru articulații, coxofemurală, a genuchiului, a gleznei și a ansamblului metatarsofalagial , cu câte 1 grad de liberate [18],[16],[17]. Structura adoptată este reprezentată în figura 11.
Se consideră același sistem de referință fix x0O 0 y0 z0 ca și în cazul modelului complet, celelalte sisteme alegându-se cu respectare convenției Denavitt-Hartenberg. În vederea asigurării posturii inițiale corecte a membrului inferior, se consideră că în cadrul modelului redus articulația 3 este introdusă cu corecția menționată la articulația 8 a modelului complet. Astfel în matrice de transfer corespunzătoare cos q3=sin θ3 și sin q3=−cosθ3. Tabelul 2 al variabilelor articulare este prezentat pentru membrul inferior drept, în concordanță cu figura 11.
34

Fig.11. Modelul cinematic redus al membrului inferio
Tabelul 2Articulația θi d i Li α i
1 q1 −b /2 f 0°
2 q2 0 t 0°
3 q3−90° 0 p 0°
4 q4 0 d 0°
Cu datele din tabelul 2 și ținând seama de această observație se obțin cele patru matrice de transfer:
35

T 1=[cos θ1 −sin θ1
sinθ1 cosθ1
0 fcos θ1
0 f sin θ1
0 00 0
1 −b/20 1
]❑
0
(3.6)
T 2=[cos θ2 0sinθ2 0
−sin θ2 tcosθ2
cosθ2 tsinθ2
0 00 0
1 00 1
]❑
1
T 3=[ sin θ3 cosθ3
−cosθ3 sin θ3
0 p sin θ3
0 −p cosθ3
0 00 0
1 00 1
]❑
2
T 4=[cosθ4 −sinθ4
sin θ4 cos θ4
0 dcosθ4
0 d sin θ4
0 10 0
1 00 1
]❑
3
Matricea generală G4, ce reprezintă poziția și orientarea sistemului de referință atașat degetelor față de sistemul de referință fix, se determină ca produs al matricelor de transfer:
G4= T1 ∙❑0 T 2∙ T3 ∙ T 4❑
3❑2
❑1 (3.7)
Calculele s-au efectuat în Matlab, rezultând ecuațiile cinematice ale modelului redus al membrului inferior uman:nx=s1¿
n y=−c1¿
nz=0
O x=c1¿
O y=c1¿
O z=0
ax=0a y=0az=1
px=d∗s1¿+ p∗s1¿+t∗c12+f ∗c 1py=−d∗c 1¿−p∗c 1¿+t∗s12+f ∗s1pz=−b /2
(3.8)
Se observă că ecuațiile cinematice sunt mult simplificate față de modelul complet (unde nu au fost detaliate), forma lor datorându-se faptului că, toate cuplele cinematice fiind paralele, variabilele articulare se însumează câte două,
36

trei și respectiv toate patru, în funcție de nivelul la care se studiază mișcarea. Astfel, în legea de mișcare a femurului intervine doar cupla 1 ce modelează articulația coxofemurală, în cea a tibiei intervin cuplele 1 și 2, în cea a plantei intervin cuplele 1,2 și 3 , iar în cea a degetelor intervin toate cuplele.
Pe baza ecuațiilor cinematice (3.8) s-au reprezentat pozițiile membrului inferior, atât în cazul în care toți cei patru parametri articulari sunt variabili în raport cu timpul , în limitele fizico-anatomice reale, cât și în cazul în care toți parametrii articulari sunt menținuți la valoare nulă caracteristică poziției orostatice.
Poziția ortostatică inițială pentru mișcare este aceași cu cea reprezentată la modelul complet, considerând aceleași lungimi ale segmentelor considerate. De asemenea, intervalele, în care pot lua valori variabilele articulare, sunt aceleași cu cele menționate la modelul complet cuplele având poziții identice.
Spațiul activ, pentru cazul în care toți parametrii articulari sunt variabili, fost reprezentat prin împărțirea intervalelor unghiulare într-un număr mai mare de diviziuni decât la modelul complet, acțiune posibilă tot datorită simplității ecuațiilor cinematice. Astfel, în figura 12 este prezentat spațiul activ al membrului inferior în model redus, obținut prin divizarea tuturor intervalelor unghiulare în 10 diviziuni. Se observă că, datorită posibilității de execuție în toate articulațiile doar a mișcărilor de flexie-extensie în jurul unor axe paralele cu axa fixă O z z0, hipersuprafața ce delimitează spațiul activ nu are geometrie
3D, ci degenerează la un domeniu 2D în planul de ecuație z=−b2
=−20 cm.
Extinderea maximă a deplasării vârfului degetelor se înregistrează la coordonatele f +t+ p+d=97 cm pe axa fixă O0 y0 în sens negativ și pe axa fixă O x x0 în sens pozitiv, corespunzător flexiei, așa cum se observă mai clar din considerarea doar a proiecției în planul x0O 0 y0, paralel cu cel în care efectiv se produce mișcarea (fig.13).
În extensie, vârful degetelor nu depășește coordonatele x=−76 cm și y=90 cm din cauza limitărilor impuse variabilelor articulare
37

Fig.12. Spațiul activ al membrului inferior (model redus), când domeniile unghiulare ale articulațiilor sunt divizate în câte 10 intervale
Fig.13. Proiecția în plan sagital a spațiului activ al membrului inferior
38
Capitolul 4. Modelarea solicitărilor statice şi dinamice ale sistemelor anatomice gleznă-picior şi genunchi – gambă
4.1 Modelarea sistemului anatomic gleznă – picior folosind metoda dinamicii inverse
Modelarea biomecanică a sistemului anatomic gleznă – picior se bazează pe metoda dinamicii inverse, ce include o serie de tehnici specifice de calcul mecanic şi matematic, în vederea extragerii de informaţii utile specifice proiectării şi realizării unor implanturi de osteosinteză specifice fracturilor transsindesmotice de peroneu.
Metoda dinamicii inverse presupune ca, datele cinematice ale sistemului biomecanic să fie definite în detaliu, iar obiectivul constă în determinarea parametrilor dinamici ce cauzează mişcările sistemului. Metoda foloseşte modele ale corpurilor rigide pentru a reprezenta comportamentul mecanic al pendulelor aflate în conexiune, sau mai concret, al membrelor corpului uman unde, parametrii antropometrici1, parametrii dinamici şi parametrii cinematici ai segmentelor corpului uman sunt folosiţi ca date de intrare pentru sistemul de ecuaţii al echilibrului dinamic, pentru determinarea forţelor de reacţiune internă şi a momentelor ce cauzează mişcările sistemului.
Metoda dinamicii inverse presupune folosirea unor condiţii speciale, astfel:
corpul uman este împărţit în segmente anatomice individuale; segmentele sunt considerate corpuri rigide cu masa concentrată în centrul
lor de greutate; parametrii antropometrici ai segmentelor sunt consideraţi constanţi în
timpul deplasări; forţa de frecare cu aerul este minimă; forţele de frecare cu solul şi din articulaţii sunt considerate nule; viteza de deplasare a întregului sistem este considerată constantă; mersul este considerat un ciclu repetitiv şi simetric pentru ambele
membre inferioare.
În vederea determinării forţelor de reacţiune şi a momentului reactiv din articulaţia gleznei s-au parcurs două etape, reprezentate schematic în figura 4.1, după cum urmează:
1 Antropometria este o metodă de studiu a posibilităţilor de identificare a oamenilor în funcţie de forma, amprente şi părţi ale corpului uman. Este o metodă fundamentală în cercetările bio-antropologiei populaţionale. (Vlădescu, M., Vulpe, C.: Atlasul antropologic al Transilvaniei, Editura Academiei Române, 2005) [V7].
39

1. reducerea forţelor interioare (forţele musculare, din tendoane şi de contact între suprafeţele osoase) la o singură forţă ce reprezintă rezultantă tuturor forţelor interioare;
2. scrierea şi rezolvarea analitică a ecuaţiilor de echilibru dinamic pentru fiecare fază de suport a piciorului pe sol în vederea determinării parametrilor caracteristici modelării statice şi dinamice a sistemului anatomic gleznă – picior.
Fig. 4.1 Schema de principiu a metodei alese pentru modelarea biomecanică în vederea determinării parametrilor caracteristici modelării statice şi dinamice a sistemului anatomic gleznă – picior.
Tehnica reducerii forţelor interioare la o singură rezultantă are la bază condiţiile impuse anterior. Astfel, membrul inferior este împărţit pe segmente anatomice (coapsă, gambă şi picior), urmând apoi obţinerea modelelor solidelor rigide pentru fiecare segment în parte. Fiecărui segment în parte i s-a asociat un model, respectiv: pentru coapsă şi gambă modelul asociat este o bară articulată la capete iar pentru picior, modelul asociat este un triunghi rigid oarecare.
Pentru determinarea forţelor de reacţiune şi a momentului reactiv din articulaţia gleznei este necesar să se cunoască toate forţele interne ce se exercită în muşchi, tendoane şi între suprafeţele osoase aflate în contact, punctele de inserţie a muşchilor precum şi distanţele dintre punctele de inserţie şi centrul de rotaţie al gleznei. Toate aceste cerinţe sunt aproape imposibil de determinat şi complică foarte mult modelul. Astfel, cu ajutorul modelului propus, va fi posibilă
40

determinarea forţelor de reacţiune şi a momentului net muscular, folosind tehnica de reducere a forţelor. Această tehnică presupune următoarele:
se consideră toate forţele externe şi interne ce acţionează asupra sistemului gleznă- picior;
articulaţia gleznei, călcâiul şi vârful tarsienelor formează un triunghi rigid oarecare ABC;
forţa F este considerată ca fiind rezultanta tuturor forţelor exercitate de muşchi, tendoane şi structuri osoase aflate în contact;
se consideră F* ca fiind rezultanta forţelor exercitate de muşchi, tendoane şi structuri osoase aflate în contact, translatată în articulaţia gleznei;
corespondenta forţei F* este forţa ce echilibrează sistemul, - F*, forţă care are acelaşi punct de aplicaţie, aceeaşi direcţie dar sens contrar;
cuplul de forţe (F, - F*) dă naştere unui moment net muscular Mg ce acţionează în articulaţia gleznei. Acest moment muscular ia în calcul atât muşchii agonişti cât şi pe cei antagonişti;
forţa rezultantă F*, translatată în centrul de rotaţie al articulaţiei gleznei se descompune pe direcţiile Ox, Oy, în Rgx respectiv Rgy.
41

Fig. 4.2 Metoda reducerii forţelor aplicată modelului sistemului anatomic gleznă – picior.
În figura 4.2 sunt reprezentate modelele biomecanice ale sistemului gleznă-picior, folosind metoda dinamicii inverse, unde: Rgx,y este forţa de reacţiune din gleznă ce acţionează pe direcţiile Ox, Oy, în N; Rsx,y este forţa de reacţiune a solului asupra piciorului ce acţionează pe direcţiile Ox, Oy, în N, cu punctul de aplicaţie în călcâi B (pentru prima fază de suport), la 23,6% din lungimea piciorului faţă de călcâi (pentru a II-a fază), la 70,5% din lungimea piciorului faţă de călcâi (pentru faza a III-a), în vârful degetelor C (pentru fazele IV şi V) ; Gp este greutatea piciorului care are originea în centrul de greutate al triunghiului oarecare ABC, în N; Mg, momentul net ce acţionează în articulaţia gleznei şi face posibilă rotirea acesteia, în Nm; mp este masa piciorului, în kg; M este masa totală a subiectului, în kg; ax,y este acceleraţia piciorului în centrul de greutate al acestuia, pe direcţia Ox, Oy, în m/s2; este unghiul pe care îl face axa de simetrie a gambei cu orizontală, în ; , unghiul dintre suprafaţa plană a solului şi suprafaţa plantară a piciorului în ; A, glezna; B, călcâiul; C, vârful degetelor considerat a fi vârful celui de-al doilea metatars; O, centrul de greutate al piciorului; p, acceleraţia unghiulară a piciorului în planul mişcării, în rad/s2; Ip, momentul de inerţie al piciorului kgm2; d1,2, distanţele, pe orizontală şi verticală, dintre centrul de rotaţie al gleznei şi punctul de aplicaţie al călcâiului, în m; d3,4, distanţele, pe orizontală şi verticală, dintre centrul de greutate al piciorului şi centrul de rotaţie al articulaţiei gleznei, în m.[32]
42

Fig. 4.3 Modelarea sistemului anatomic gleznă-picior folosind metoda dinamicii inverse, în timpul fazelor de suport ale piciorului pe sol: contactul iniţial (a); încărcarea (b); mijlocul sprijinului (c) sprijinul terminal (d); desprinderea de pe sol (e).
Pentru determinarea reacţiunilor ce se dezvoltă în gleznă, în timpul fazelor de suport ale piciorului pe sol, conform metodei dinamicii inverse, s-au scris ecuaţiile de echilibru dinamic:
prima fază de suport
43

.
;
;
34312 damdamIdGdRdRM
amGRR
amRR
ypxppppysxsg
yppysyg
xpxsxg
(4.1)a doua fază de suport
.
;
;
ppypxpyssxpg
ypyspyg
xpxsxg
IdamdamdRdRdGM
amRGR
amRR
34123
(4.2)a treia fază de suport
.
;
;
ppypxpyssxpg
ypyspyg
xpxsxg
IdamdamdRdRdGM
amRGR
amRR
34123
(4.3)a patra fază de suport
.
;
;
ppypxpyssxpg
ypyspyg
xpxsxg
IdamdamdRdRdGM
amRGR
amRR
34123
(4.4)a cincea fază de suport
.
;
;
ppypxpyssxpg
ypyspyg
xpxsxg
IdamdamdRdRdGM
amRGR
amRR
34123
(4.5)
4.2. Modelarea sistemului anatomic genunchi – gambă folosind metoda dinamicii inverse
Modelarea biomecanică a sistemului anatomic genunchi – gambă se bazează pe aceleaşi condiţii speciale ale metodei dinamicii inverse, trecând prin aceleaşi etape ce au fost urmate şi la modelarea sistemului anatomic gleznă – picior.
44

a) b)
c) d)
45
e)Fig. 4.4 Modelarea biomecanică a subsistemului anatomic genunchi-gambă folosind metoda dinamicii inverse, în timpul fazelor de suport ale piciorului pe sol: contactul iniţial al călcâiului cu solul (a); contactul total cu solul (b); mijlocul suportului (c); ridicarea călcâiului (d); desprinderea de pe sol (e).
În figura 4.4 sunt reprezentate modelele biomecanice ale sistemului anatomic genunchi - gambă, folosind metoda dinamicii inverse, în timpul fazelor de suport ale piciorului pe sol, unde: mg, masa gambei, în kg; M, masa totală a subiectului, în kg; ax,y, acceleraţia gambei faţă de centrul de greutate al acesteia, pe direcţia Ox, Oy, în m/s2; , unghiul dintre axa de simetrie a coapsei şi orizontală, în ; g, acceleraţia unghiulară a gambei în planul mişcării (planul sagital), în rad/s2; Ig, momentul de inerţie al gambei, în kgm2; d5,6, distanţele, pe orizontală şi verticală, dintre centrul de rotaţie al gleznei şi centrul de rotaţie al genunchiului, în m; d7,8, distanţele, pe orizontală şi verticală, dintre centrul de rotaţie al genunchiului şi centrul de greutate al gambei, în m.
Pentru determinarea reacţiunilor ce se dezvoltă în genunchi, în timpul fazelor de suport ale piciorului pe sol, conform metodei dinamicii inverse, s-au scris ecuaţiile de echilibru dinamic:
prima fază de suport,
.IdRdRdamdamdGMM
;amGRR
;amRR
gg6xg5yg7'yg8
'xg7gg
'g
'yggyg
'yg
'xgxg
'xg
(6.6)
46

a doua fază de suport
.IdRdRdamdamdGMM
;amGRR
;amRR
gg6xg5yg7'yg8
'xg7gg
'g
'yggyg
'yg
'xgxg
'xg
(6.7)a treia fază de suport,
.IdRdamMM
;amGRR
;amRR
gg6xg8'xgg
'g
'yggyg
'yg
'xgxg
'xg
(6.8)a patra fază de suport,
.IdRdRdamdamdGMM
;amGRR
;amRR
gg6xg5yg7'yg8
'xg7gg
'g
'yggyg
'yg
'xgxg
'xg
(6.9)a cincea fază de suport,
.IdRdRdamdamdGMM
;amGRR
;amRR
gg6xg5yg7'yg8
'xg7gg
'g
'yggyg
'yg
'xgxg
'xg
(6.10)Studiul teoretic asupra modelării biomecanice a sistemului anatomic
gleznă-picior şi genunchi-gambă, prezentat în paragraful 4.1 și 4.2 , s-a bazat pe utilizarea metodei dinamicii inverse. Folosind această metodă s-au putut scrie ecuaţiile analitice de echilibru dinamic pentru modelele biomecanice ales, în cele cinci faze ale suportului piciorului pe sol, din care au rezultat anumite necunoscute ce sunt caracteristice parametrilor necesari modelării statice şi dinamice a sistemului anatomic gleznă-picior şi genunchi-gambă. Astfel, aceşti parametrii sunt reprezentaţi de forţele de reacţiune ale solului asupra piciorului pe cele două direcţii Ox, Oy (Rsx şi Rsy), acceleraţiile piciorului şi a gambei pe cele două direcţii Ox, Oy (ax, ay respectiv a
x, ay), unghiurile de înclinaţie dintre
segmentul piciorului şi segmentul gambei (), respectiv dintre gambă şi coapsă () şi unghiurile de atac ale piciorului pe sol ().
47

Capitolul 5. Expunerea organismului uman la vibrații
S-au comparat efectele vibrațiilor asupra organismelor supuse la vibrația întregului corp în cazul șoferilor utilajelor grele cu cele asupra muncitorilor dintr-un mediu similar, dar care nu au fost supuși la vibrații ale întregului corp. Studiile au indicat că problemele spatelui sunt mult mai des întâlnite și mult mai grave în cazul expunerii la vibrații (Boshuizen ș.a. ,2000,2002).
Industrie: Vehicule, elevatoare
Construcții: Excavatoare, remorci, macarale, buldozere, tractoare cu șenile
Transporturi: Autobuze, camioane, autoturisme, avioane, elicoptere, metrouri, locomotive, vapoare
Agricultură: Tractoare, mașini de terasament
A) Expunerea pe termen scurt la vibrații din domeniul 2-20 Hz, la 1 m /s2, duce
la apariția următoarelor simtome (Boshuizen ș.a. ,2000,2002):
Dureri abdominaleStare generală de disconfort, inclusiv dureri de cap
Dureri ale pieptului
Greață
Pierderea echilibrului
Contracții ale mușchilor și scăderea preciziei la executarea
manevrelor
Respirație îngreunată
Vorbire greoaie
B) Expunera pe termen lung poate duce la apariția unor probleme grave de
sănătate, în special probleme ale coloanei vertebrale:
Hernie de disc
Schimbări degenerative în coloană
Scolioză lombală
Boli ale discurilor intervertebrale
Boli degenerative ale coloanei
Deplasarea de disc
Boli ale sistemului gastrointestinal
Boli ale sistemului uro-genital.
48
Răspunsul omului la vibrația întregului corp depinde de frecvența vibrației, de accelerația vibrației și de timpul de expunere (Seidel,2003). Din cauza evaluării dificile a răspunsului la vibrații și a inconsistenței datelor obținute în urma cercetării, Organizația de Standardizare Internațională, prin ISO 2631/1:1997 ÷ 2631/5:2004 a stabilit Evaluarea expunerii omului la vibrații ale întregului corp. Când se folosesc aceste criterii și limite, este important să se țină cont de restricțiile aplicațiilor.
Unele studii indică faptul că standardele nu sunt suficient de joase și că bolile sistemelor musculare și osos apar și în urma expunerii la valori ale vibrațiilor sub nivelul valorilor din standard. Standardul este potivit doar în cazul oamenilor sănătoși, cu o rutină a vieții normală, care sunt supuși stresului unei zile normale la muncă. Standardul oferă limite numerice pentru expunerea la vibrații transmise de la suprafețe solide către corpul uman, în domeniul de frecvență 1-80Hz.
Standardul se referă la trei nivele definite de interes: reducerea confortului, scăderea îndemănării datorate oboselii și limitele expunerii.
5.1 Determinarea limitelor de expunere a întregului corp la vibrații
Mai multe studii au publicat nivele ale vibrațiilor pentru diferite vehicule folosite în construcții, agricultură și industrie. Valorile vibrațiilor au fost măsurate pe diferite tipuri de sol, cu vehicule din diferiți ani de fabricație, etc.
Tabelul 3 Comparația valorilor vibrațiilor pentru diferite vehicule (Hulshof, Zanten,
1997)
Vehicul Accelerații pe direcțiile x,y,z (m /s2 ¿
Elevator 0,8
Buldozer cu scaun standard 0,52 – 0,64
Tractor pe drum pavat 1,76 – 2,03
Buldozer cu scaun ce absoarbe
vibrațiile
0,43 – 0,80
Macara 0,4 – 2,3
49
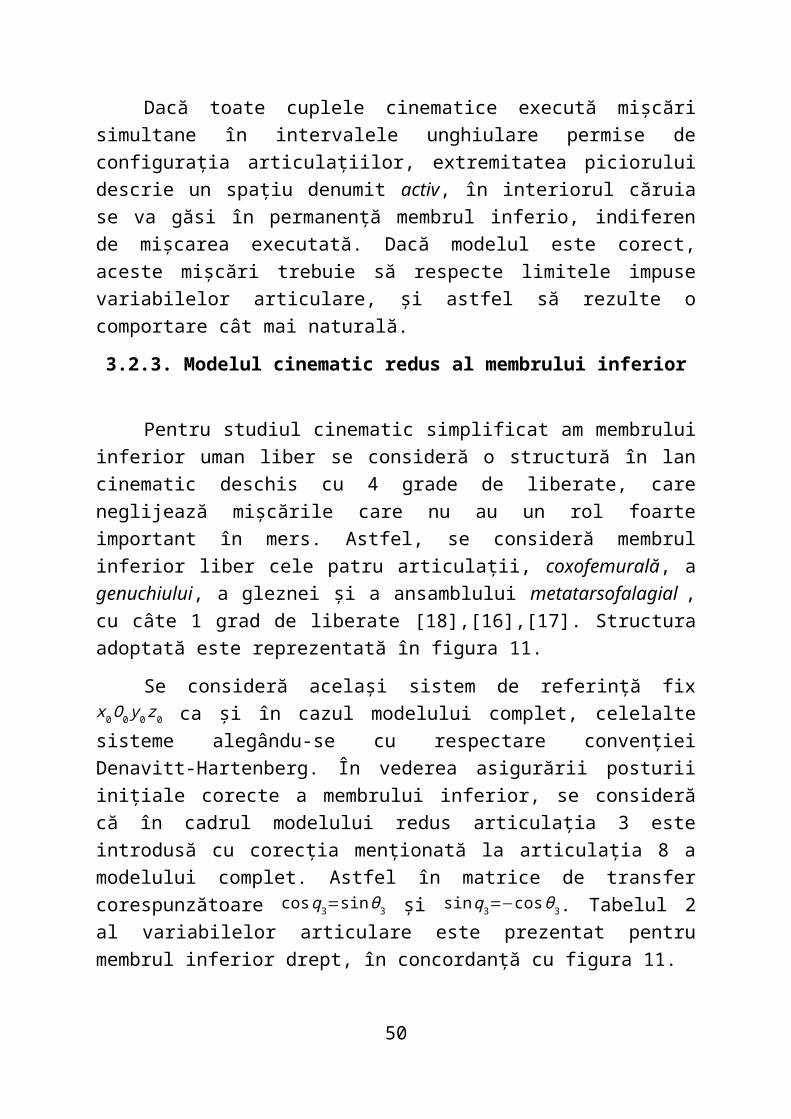
Tractor pe câmp 0,6
Vagon de marfă 1,0
Excavator 0,5 – 2,3
În Fig. 5.1 și 5.2 sunt prezentate dependențele accelerației pe direcții longitudinale și transversală în funcție de frecvență, pentru diferiți timpi de expunere.
Studiile au arătat că domeniul de frecvență la rezonanță în partea de jos a spatelui (lombara) este de 4÷8 Hz. Cu acceastă informație și valoarea accelerației măsurată în timpul activității, pot fi determinate limita accelerației în cazul vibrației întregului corp (direcția veriticală – Fig.3.7) acceptă timp de 8h într-o zi de lucru, este de 0,315 m /s2 (dacă se ia drept criteriu scăderea îndemănării datorată oboselii) și de 0,63 m /s2 având drept criteriu starea sănătății (limita timpului de expunere) (Wilder, 2003).
Fig. 5.1 Dependența accelerației pe direcție longitudianlă az , în funcție de
frecvență
(∆)- 25 min, (□)- 1 h, (▲)- 2,5 h, (■)- 8 h, (○)- 16h
50

Fig. 5.2 Dependența accelerației pe direcției transversale ax , ay , în funcție de
frecvență (∆)- 25 min, (□)- 1 h, (▲)- 2,5 h, (x)- 4 h, (■)- 8 h, (○)- 16h
Vibrația se transmite întregului corp prin suprafețele suport ale acestuia: picioarele, în cazul poziției veritcale sau fesele și spatele, în cazul poziției șezut.
În mod normal nu se ajungel la efecte vătămătoare, ceea ce înseamnă, că organismul se află în situația de a compensa microtraumatismele produse eventual la nivelul oaselor, ligamentelor și articulațiilor, în cadrul capacității sale naturale de rezistență, respectiv de regenerare (Kjellberg, ș.a. 1994). Uzarea articulației prin vibrațiile mecanice nu depășesc în mod normal modificările artritice apărute ca urmare a procesului fiziologic de îmbătrînire.
În cazul anumitor persoane, totuși, sunt sunt semnalate afecțiuni la cot, articulația pumnului și a umărului, corespunzând imaginii clinice ale unei artroze deformate care trebuie considerată ca fiind amplificată și prematură față de evoluția normală în vârstă.
Cea mai solicitată este articulația humero-cubitală, după care urmează articulația pumnului și articulația scapulo-umerală.
De asemenea acțiunea vibrațiilor poate afecta și circulația periferică (Bovenzi, ș.a. 1995).
51

Când se vorbește de influența dăunătoare, ca urmare a activităților efectuate cu ajutorul uneltelor vibratoare, una dintre primele probleme care trebuie abordată o reprezintă apariția tulburărilor circulatorii.
Turburările circulatorii se manifestă prin apariția unor crize de spasme vasculare în degete, urmate imediat de cianozarea pielii sau de tumefacție (Smith, 1998).
Tulburările circulatorii apar, independent de faptul că persoana expusă la vibrații lucrează într-un microclimat cald sau rece.
Pe lângă problemele sistemelor muscular și osos, expunera întregului corp la vibrațiile ocupaționale creează probleme și sistemelor psihomotor, fiziologic și psihologic (Mansfield, 2005).
Pentru precizarea corectă a acțiunii virbațiilor asupra organismului uman trebuie luați în considerare simultan doi dintre parametrii mecanici care caracterizează vibrațiile, pe de-o parte frecvența și pe de altă parte depasarea, accelerația sau energia vibrației (Matsumoto și Griffini, 1998, 2002, 2003, 2005).
Vibrațiile de joasă frecvență (sub 1Hz), ca urmare a acțiunii variațiilor de accelerație asupra labirintului urechi interne, produc dezichilibrări și senzații de vomă (rău de mare, de autovehicul, de avion, etc.).
Vibrațiile care acționează asupra omului pot produce: jenarea activității fizice și intelectuale, deteriorări mecanice, fenomene subiective.
Acțiunea vibrațiilor asupra activității fizice și psihice a omului este puțin precizată, cunoscându-se doar că un factor important îl constituie oboseala dar care la rândul ei nu permite o măsurare corespunzătoare și o apreciere orientativă.
Deteriorările mecanice se pot produce dacă accelerațiile sunt destul de mari și se manifestă prin fracturi ale oaselor, deteriorarea plămânilor, leziuni ale peretelui interior al intestinului, leziuni ale craniului, deteriorări cardiace (Conway, ș.a., 2006).
Fenomenele subiective care se manifestă la omul supus vibrațiilor includ perceperea lor, lipsa de confort, durerea și teama. Durerile apar de obicei în regiunea abdominală, în coșul pieptului, se manifestă dureri testiculare, de cap, respirația este îngreunată, apare o stare de neliniște (Nishida, ș.a.,2000).
În general se consideră trei trepte de apreciere a efectelor vibrațiilor: pragul de percepere, de neplăcere și de intoleranță.
52

5.2. Criteriile expunerii întregului corp la vibrațiiCorpul uman este, atât din punct de vedere fizic cât si biologic, un
„sistem” extrem de complex. Când e privit ca un sistem mecanic se poate considera ca fiind format din „elemente” liniare cât și neliniare, cu propietăți mecanice destul de diferite de la o persoană la alta (Nawayseh și Griffini, 2003, 2005). Din punct de vedere biologic situația este mai complicată, mai ales atunci când sunt introduse efectele psihologice (Miyashita ș.a., 1992).
Se consideră corpul uman ca un sistem mecanic pentru care efectul de rezonanță distinct are loc în intervalul 3÷6 Hz. De asemenea, s-a constatat că în domeniul 60÷90 Hz perturbările sunt resimțite la nivelul globului ocular, ceea ce sugerează rezonanța, iar în domeniul 100÷200 Hz, efectul de rezonanță s-a observat în partea de jos a sistemului mandibulă/craniu.
Din punct de vedere al impactului vibrațiilor, domeniul frecvențelor joase este cel mai important. Unele dintre cele mai importante măsurători au fost efectuate de către Griffini (2000) și se referă la atenuarea vibrațiilor de-a lungul corpului uman. Rezultatele obținute la 50Hz arată că atenuarea de la picior la cap este de aproximativ 40dB.
Experimentele care s-au efectuat pentru a determina criteriile expuneri la vibrații s-au axat, în cea mai mare parte , asupra modificărilor produse în asimilarea alimentelor, în activitatea musculară, activitatea de reproducere, etc. precum și asupra leziunilor interne. Efectele psihologice, cum ar fi percepția, disconfortul și durerea au fost recent studiate în detaliu. Cele mai multe studii au fost efectuate pe conducători auto și piloții de aeronave, a căror capacitate de a efectua sarcini complexe, în condiții nefavorabile, inclusiv în prezența vibrațiilor, este deosebit de importantă (Wilkstrom, ș.a., 2004), (Bovenzi și Betta, 1994), (Howarth și Griffini, 1991), (Martin, ș.a., 1980).
Datele disponibile sunt, prin urmare, în principal pentru subiecți ce se află în picioare sau așezați (Griffin și Nawayseh, 2005), (Aldien, ș.a., 2005), (Wang, ș.a.2006). Standardul ISO 2631 adună aceste date într-un set de curbe ale criteriilor vibrațiilor pentru vibrații longitudianele și transversale în domeniul de frecvențe 1÷80 Hz.
Tabelul.4 Simtomele expunerii la vibrații la frecvențe din domeniul 1÷20 Hz
Simptome Frecvență (Hz)
Stare generală de disconfort 4 – 9
53
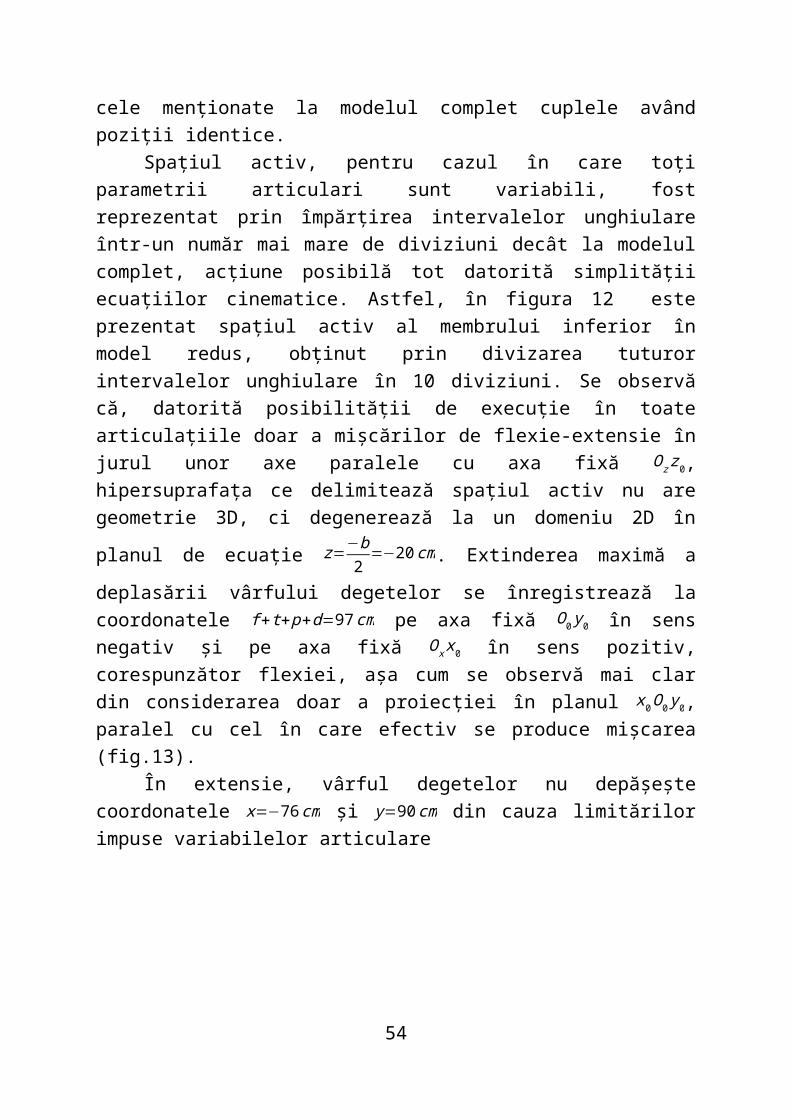
Dureri de cap 13 – 20
Dureri ale mandibulei 6 – 8
Deficiențe de vorbire 13 – 20
Respirație îngreunată 12 – 16
Dureri în pipt 5 – 7
Dureri abdominale 4 – 10
Probleme de urinare 10 – 18
Creșterea tonusului muscular 13 – 20
Îngreunarea mișcării 4 – 8
Contracția mușchilor 4 - 9
Vibrațiile la frecvențe mai mici de 1 Hz apar la mai mult tipuri de mașini de transport și produc efecte, de exemplu cinetoză (rău de transport), care au caracteristici complet diferite de cele produse la frecvențe mai înalte.
Aceste efecte nu pot fi ușor corelate cu cei trei parametrii ai mișcării: intensitatea, durata și frecvența, așa cum au fost posibile în intervalul 1÷80. În plus reacțiile omului la vibrații sub 1 Hz sunt extrem de variabile și par să depindă de un număr mare de factori externi care nu au nici o legătură cu mișcarea, de exemplu vârsta, sexul, imagini, activitate, mirosuri (Kittusamy și Buchholz, 2004).
În cida acestei variabilități și a puținelor date disponibil, a fost făcută o încercare pentru a exprima standarde experimentale pentru domeniul de frecvență cuprins între 1 si 0,1 Hz ca o completare la ISO 2631.
Peste 80 Hz, senzațiile și efectele depind foarte mult de condițiile locale de la punctul de aplicare, de exemplu, direcția, poziția și zona reală spre care este transmisă vibrația, precum și amortizarea acestui punct, cauzat de exemplu de îmbrăcăminte sau de încălțăminte. Acești factori externi influențează puternic raspunsul țesutului superficial afectat de frecvențe mai mari de 80 Hz. Astfel in general nu este posibil, în prezent, să fie specificate criterii în afara domeniului 1÷80 Hz.
54
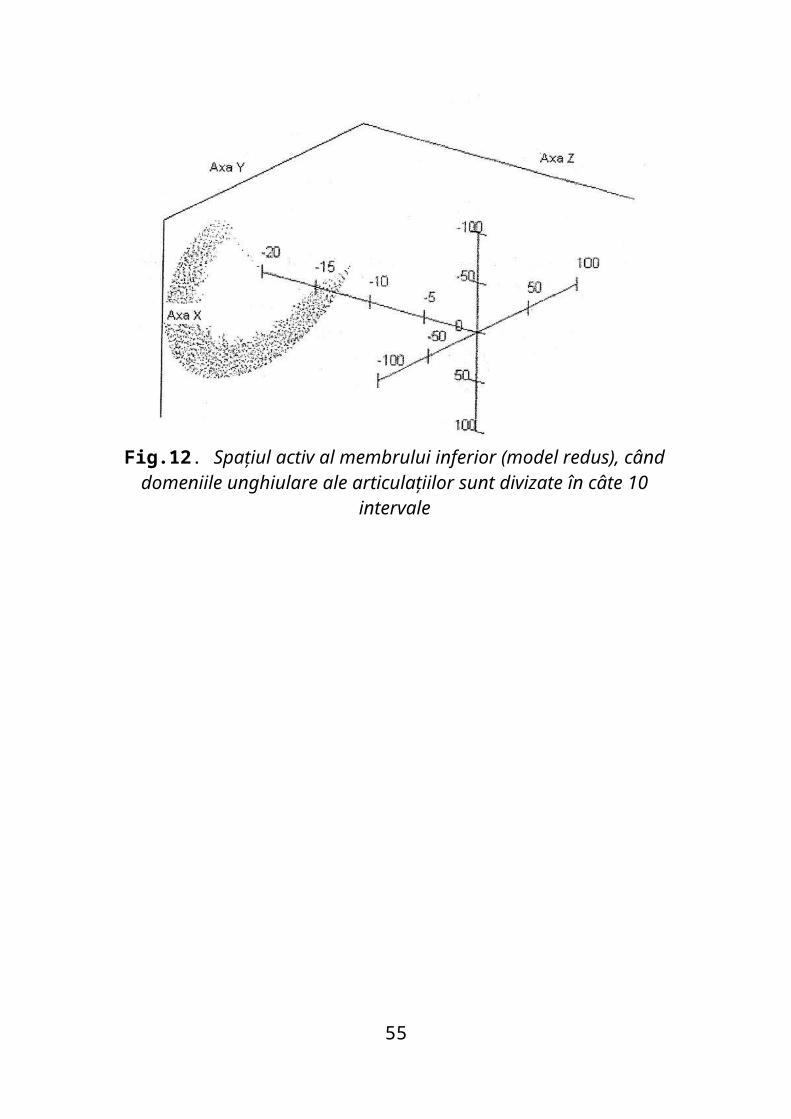
Nu există deocamdată criterii stabilite în cazul vibrațiilor unghiulare, echivalente celor transversale descrise mai sus. În practică, mișcările unghiulare (de exemplu rotație, ruliu și tangaj) ale căror centre de rotație se află la o anumită distanță de la punctul de aplicare la corp, pot fi aproximate satisfăcător printr-o mișcare de transversală.
În Fig.5.3. este prezentată reacția subiectivă ca funcție de deplasare maximă a
vibrației inițiale și de durată. Numerele indică următoarele relații ale zonelor dintre
linii:
Ia – pragul perceției;
Ib – percepție slabă;
IC – percepție puternică, deranjantă;
IIa – percepție foarte deranjantă, periculoasă în cazul expunerii îndelungate;
IIb – foarte neplăcut, categoric periculoasă.
Dacă s-a scăzut durata unui puls, nu s-a constatat o creștere a tolerenței.
Fig. 5.3. Toleranța subiecților umani, în picioare sau culcați pe spate, în cazul
vibrațiilor longitudinale în impusluri datorate unor pickhammere, unelte grele, trafic
intens, etc.
( ) 1 impuls / s , ( - - - ) 6 impuls / s
55

Fig. 5.4 Răspunsul corpului uman la diferite vibrații
1-Rău de mișcare/confort redus, 2-Rău de mișcare/disconfort accentuat, 3-Întregul
corp/vibrații transversale ax și a y, 4-Întregul corp/vibrații longitudinale az, 5-Mână-
braț
În Fig.5.4. sunt date nivelele de expunere permise la vibrații pentru 24h
(Mansfield și Griffin, 2000, 2001, 2002).
56

Capitolul 6. Studiul stabilității unei proteze de gambă cu ajutorul mediului simulink
În aceast capitol se face studiul stabilității unei proteze de gambă modelată printr-un sistem dinamic cu un grad de libertate cu ajutorul software-ului Simulink. Din interpretarea diagramelor trasate în spațiul fazelor rezultă frecvențele pentru care mișcarea protezei de gambă este stabilă.
6.1. IntroducereÎn vederea studiului se utilizează o proteză de gambă modulară prezentată
în figura 6.1.
Proteza de gambă modulară are o structură tubulară (endoscheletică) din duraluminiu, oțel-inox și/sau titan. Partea estetică a protezei de gambă modulară este din spumă poliuretan (burete) modelată anatomic și ciorap estetic.
Articulația de gleznă a protezei poate fi monoaxială, biaxială, sau dinamică din oțel-inox sau titan.
Pentru proteza din figura 6.1 se propune un model dinamic cu un grad de libertate prezentat în figura.6.2
Fig.6.1. Proteză de gambă modulară
57
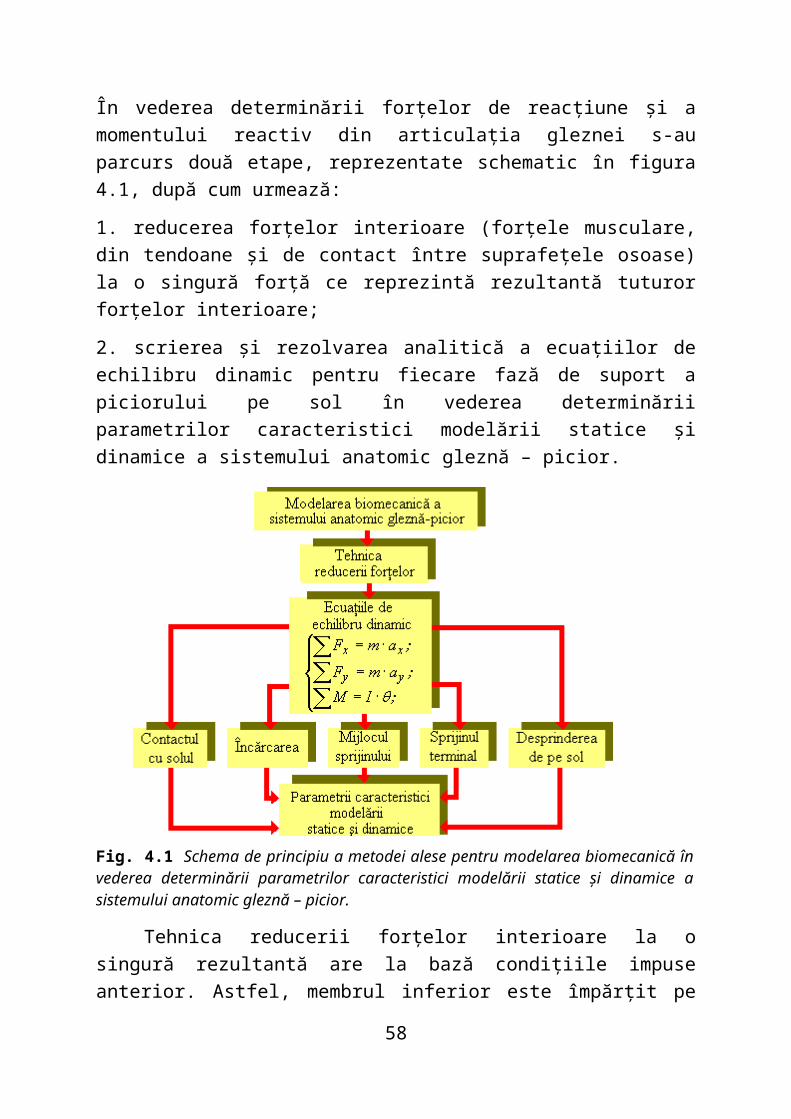
Fig. 5.2 Modelul dinamic
6.2. Studiul modelului dinamic cu ajutorul mediului simulinkUtilizând ecuația lui Lagrange de speța a II-a , pentru modelul dinamic
din figura 6.2 se obține ecuația diferențială de ordinul al doilea, lineară și cu coeficienți constanți și neomogenă:
m x+c x+kx=F0sin ωt (6.1)unde m- greutatea [kg]; c- coeficientul de amortizare vâscoasă [N/(m/s)]; k- coeficientul de rigiditate [N/m]; x- deplasarea[m] și ω- pulsația [rad/s] au semnificațiile cunoscute din mecanică [6].
Ecuaţia diferenţială (6.1) trebuie rescrisă pentru a putea fi utilizată în construirea schemei bloc dinamică din Simulink. Obţinem astfel:
x= 1m [−c x−kx+F0 sin ωt ] (6.2)
Pentru ecuația diferențială (6.2) schema bloc dinamică din mediul Simulink este prezentată în figura 6.3.
Fig.5.3 Schema bloc dinamică aferentă ecuației diferențiale (5.2)
58

Pentru integrarea ecuației diferențiale (5.2) cu ajutorul schemei bloc dinamice din fig.5.3 s-au utilizat din [41] următoarele date experimentale:
m = 0,813 kg ; k = 28500 N/m ; c = 950 N.s/m
S-a considerat un subiect având greutatea corpului de 90 [kg] deci amplitudinea forței F0=900 N .
6.3. Rezultatele simulăriiPentru frecvențele de 15 Hz, 30 Hz, 60 Hz, 120 Hz, 240 Hz și 480 Hz ,
după rularea simulării s-au trasat diagramele din spațiul stărilor prezentate în figurile de mai jos.
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
deplasare [m]
vite
za [
m/s
]
reprezentare in spatiul fazelor pt frecventa de 30 Hz
Fig. 5.4. Diagrama în spațiul stărilor pt f =15 Hz
Fig. 5.5. Diagrama în spațiul stărilor pt f =30 Hz
-0.01 -0.005 0 0.005 0.01 0.015 0.02 0.025 0.03 0.035-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
deplasare [m]
vite
za [
m/s
]
reprezentare in spatiul fazelor pt frecventa de 60 Hz
-0.01 -0.005 0 0.005 0.01 0.015 0.02 0.025 0.03-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
deplasare [m]
vite
za [
m/s
]
reprezentare in spatiul fazelor pt frecventa de 120 Hz
Fig.5.6. Diagrama în spațiul stărilor pt f =60 Hz
Fig.5.7 Diagrama în spațiul stărilor pt f =120 Hz
59

-0.01 -0.005 0 0.005 0.01 0.015 0.02 0.025 0.03-0.5
0
0.5
1
deplasare [m]
vite
za [
m/s
]
reprezentare in spatiul fazelor pt frecventa de 240 Hz
-0.01 -0.005 0 0.005 0.01 0.015 0.02 0.025-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
deplasare [m]
vite
za [
m/s
]
reprezentare in spatiul fazelor pt frecventa de 480 Hz
Fig.5.8. Diagrama în spațiul stărilor, f = 240 Hz
Fig.5.9. Diagrama în spațiul stărilor, f = 480 Hz
Concluzii privind studiul modelului dinamic cu ajutorul mediului simulink. Analizând figurile 5.4-5.9 se pot trage următoarele concluzii:
Conform teoriei haosului [48] dacă reprezentarea din spațiul stărilor este o curbă închisă atunci formează un ciclu limită și mișcarea descrisă esta stabilă.
Deci :
1) pentru frecvențele de 15 Hz și 30 Hz mișcarea este stabilă
2) pentru frecvențele de 60 Hz și 120 Hz mișcarea este stabilă cu un domeniu mai restrâns
3) pentru frecvențele de 240 Hz și 480 Hz mișcarea devine instabilă.
60
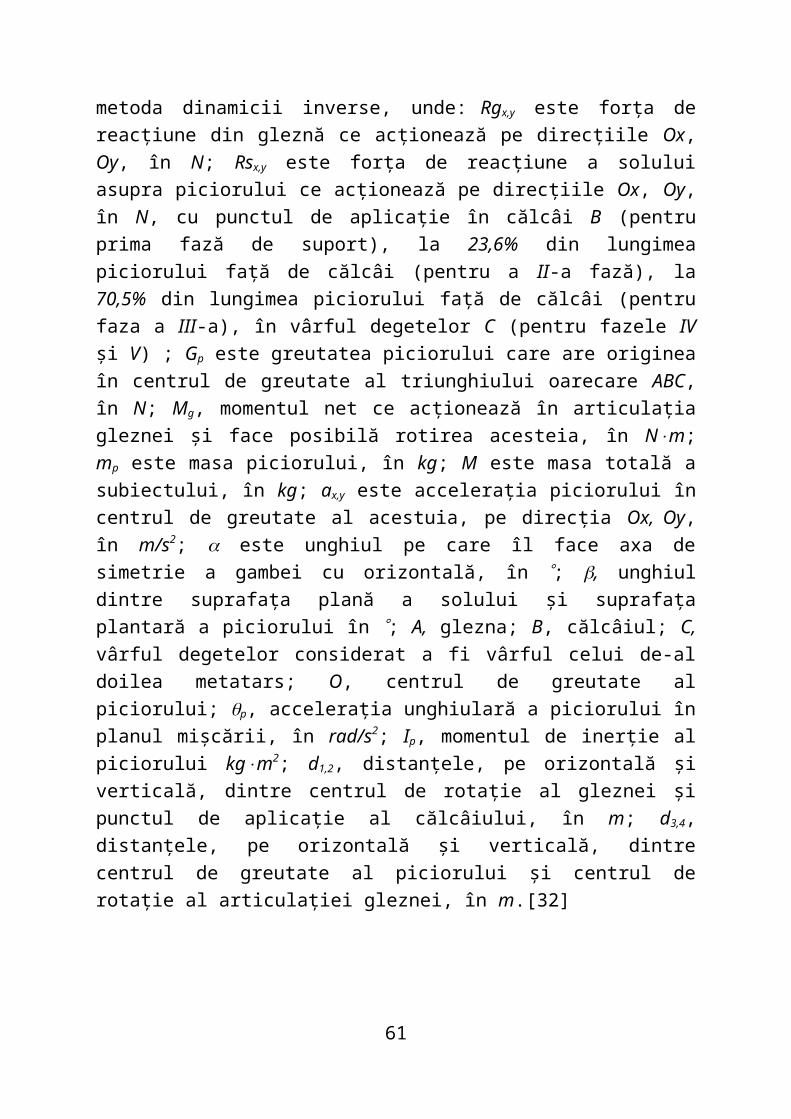
Capitolul 7.Model biomecanic al gleznei realizat în Simmechanics
Modelarea biomecanică matematică a aparatului locomotor fiind foarte complexă, rezultă necesitatea modelări cu ajutorul programări grafice în Simmechanics sub Matlab.
Astfel schema bloc dinamică realizată în Simmechanics este prezentată în figura 7.2 având la bază porțiune din modelul biomecanic de studiu asupra vibrațiilor mecanice din figura 7.1 (G.H.M.J. Subashia, Y. Matsumoto 2008)
Fig 7.1 Model biomecanic de studiu. (a) Model 1, (b) Model 2. (G.H.M.J. Subashia, Y. Matsumoto 2008)
61

Fig.7.2. Schema bloc dinamică a modelului biomecanic realizat în Simmechanics
62

Acțiunea vibrațiilor mecanice asupra organismului uman poate fi apreciată în mod corect numai dacă se tine seama simultan din doi dintre parametrii mecanici care caracterizează mișcarea:
-frecvența; -amplitudinea,accelerația sau energia vibrațiilor.
Analiza cu programare grafică a vibrațiilor umane asupra aparatului locomotor uman simplifică aspectele matematice, punându-se accent asupra structurii modelului cu obținerea de rezultate rapide în urma modelări virtualizate, astfel se dorește apropierea cât mai mult de cazul anatomic studiat real.
Diferiți parametri care carcterizează mișcarea vibratorie sunt corelați între ei prin intermediul blocurilor grafice.
Se face studiul unui model biomecanic prin modelarea unui sistem dinamic cu două grade de libertate cu ajutorul software-ului Simmechanics.
Astfel, blocurile grafice programate și valorile modelului biomecanic propus sunt:
Masa m1=2.48 Kg
Blocul reprezintă o masă de translație mecanică ideală. Blocul are un port de translație mecanică de conservare. Sensul pozitiv al blocului este de la portul de la punctul de referință. Acest lucru înseamnă că forța de inerție este pozitivă în cazul în care masa este accelerată în direcție pozitivă.Inerția 0.6251 kg*m^2 Blocul reprezintă o inerție de rotație mecanică ideală. Sensul pozitiv al blocului este de la portul de la punctul de referință. Acest lucru înseamnă că cuplul de inerție este pozitiv în cazul în care inerția este accelerată în direcția pozitivă.
63

Arc de translațieBlocul reprezintă un arc mecanic linear ideal.Coeficientul de rigiditate:k 1=24100 N /m
Amortizor de translațieBlocul reprezintă o translație mecanică, amortizor vâscos ideal.Coeficientul de amortizare:c1=3840 N / (m /s)
Arc de rotațieBlocul reprezintă un arc mecanic de rotație ideal.Coeficientul de rigiditate:k 2=12600 N∗m /rad
Amortizor de rotațieBlocul reprezintă un amortizor vâscos de rotație ideal.c2=0.0162 N∗m /(rad / s)
Articulația modeluluiunghiul inițialα 2=95.22 (grade)
Convertor ideal din mișcarea de translație în mișcarea de rotație.Raza50mm
64

Generatorul de semnal (Output a sine wave)O(t) = Amp*Sin(Freq*t+Phase) + Bias)Amplitudinea:24,8 NFrecvența de 15 Hz
Rezultatele simulării Pentru frecvențele de 15 Hz, 30 Hz, 60 Hz și 120Hz, după rularea
simulării s-au trasat diagramele vitezelor prezentate în figurile de mai jos.
15HZ 30Hz
60Hz 120HzFig. 7.3. Diagrama vitezelor, f =15,30,60,120 Hz.
Concluzii privind studiul modelului dinamic cu ajutorul mediului simulink. Analizând figurile 7.3 se pot trage următoarele concluzii:
Conform teoriei haosului [48] dacă reprezentarea vitezei este stabilă atunci formează un ciclu limită și mișcarea descrisă esta stabilă.
Deci :
1) pentru frecvențele de 15 Hz și 30 Hz mișcarea este stabilă;
2) pentru frecvențele până la 60 Hz mișcarea este stabilă cu un domeniu mai restrâns;
3) pentru frecvențele de 120 Hz și mai mari mișcarea devine instabilă.
65

Direcţii viitoare de cercetare
Rezultatele teoretice ale cercetărilor dezvoltate în prezentul raport de cercetare din doctorat deschid noi orizonturi de cercetare în inginerie bazată pe interacţiunea dintre un element mecanic aflat în vibrații și sistemul locomoro uman. Dintre cercetări ce vor fi abordate în viitor se pot menţiona:
Conceperea și realizarea unui sistem de analiză numerică și instrumentală pentru evaluarea influenței vibrațiilor asupra sistemului osteo-articular (gleznă-picior) folosind instrumenrația MATLAB;
Identificarea și fundamentarea analitică a unor modele biomecanice cu legături reologice menite să asigure analiza mișcărilor pentru sistemul locomotor uman;
Conceperea unor modele biomecanice versatile prin amplasarea corespunzătoare pe diverse trasee de acțiune a unor elemente, astfel încât răspunsul final al modelului să poată atingă precizia și gradul de fidelitate parametrică;
Stabilirea punctelor în care se vor efectua măsurătorile pentru validarea modelului biomecanic realizat in Matlab;
Alegerea soluțiilor tehnologice si realizarea experimentelor; Prelucrarea rezultatelor măsurătorilor.
66

Bibliografie:
1. A. Constantinescu, C. Pavel.
Vibrații mecanice, ISBN 978-973-755-468-0, Editura MATRIXROM, București, 2009;
2. A. GAGEA Biomecanică analictică. Editura A.N.E.F.S, București 2006
3. A. Iliescu Biomecanica exercițiilor fizice, Editura C.N.E.F.S, București, 1968, pag. 9-14;
4. A. Picu Modelarea biomecanică neliniară a dinamicii corpului uman sub acțiunea vibrațiilor transmise, Teză de doctorat, 2010
5. Abdullah H. A., Tarry, C.,Datta, R., Mittal, G. S.,Abderrahim, M.
Dynamic biomechanical model for assessing and monitoring robot-assisted upper-limb therapy, JRRD, vol. 44 nr. 1/ 2007, pag. 43 – 62;
6. Baușic, Fl., Pavel, Cr. , Diaconu, Cr
Mecanică Teoretică. Vibrațiile sistemelor mecanice cu un grad de libertate, Ed. Matrix Rom, ISBN 978-973-755-243-3, București,(2007)
7. Boboc, D. Aplicații ale vibrațiilor pasive în sport și recuperarea neuromotorie, Revista Știința sportului, 2006;
8. Bovenzi, M și Betta, A.
Low back disordars in africultural tractor drivers exposed to whole body vibration and postural stress. Applied Ergonomics 25. 231-240, 1994
9. Bratu, P. Izolarea și amortizarea vibrațiilor le utilaje de construcții, Editura Institutul de cercetări în Construcții și Economia Construcțiilor, București, 1982.
10.
Bratu, P. Vibrații Mecanice, Editura Impuls, București, 1998
11.
Bratu, P. Vibrațiile sistemelor elastice, Editura Tehnică , București, 2000
12.
Broman, H.,Pope, M.,Hansson, T.
A mathematical model of the impact response of the seated subject, Medical Engineering & Physics, Volume 18, Issue 5, July 1996, Pages 410–419;
13.
Brüel & Kjaer Human vibrations, Brüel & Kjaer Sound and Vibrations Measurement, 2003;
14.
Cho-Chung Liang,Chi-Feng Chiang
A study on biodynamic models of seated human subjects exposed to vertical vibration, International Journal of Industrial Ergonomics 36 (2006) pag. 869–890;
67

15.
Drăgulescu D. Dinamica roboților , Editura Didactică și Pedagogică, 1997
16.
Drăgulescu D. Toth-Tașcău M, Dreucean M, Rusu L,
Vibrations influence on the human composite motion, Proc. 30th JUPITER Conf. Univ. of Belgrad, Serbia&Muntenegru , 2004
17.
Drăgulescu D. Toth-Tașcău M, Dreucean M, Rusu L,
Vibrations influence on the human pelvic girdle motion, Bul. Șt. al Universității Politehnica din Timișoara, Transactions on Automatic Control and Computer Science, Tom49(63), No.2. 143-148, 2004
18.
Drăgulescu D., TothTașcău M. Couturier C.
Human upper and lower limbs modeling using Denavit-Hartenberg’s convention, Proc. Int.Conf. Situation and Perspective of Research and development in Chemical and Mechanical Industry,Krusevac,95-101, 2001
19.
Drăgulescu D. Modelarea în biomecanică , Editura Didactică și Pedagogică R.A.,2005 ISBN 973-30-1725-6
20.
Fairley, T.E. și Griffin, M.J.
The apparent mass of the seted human body:Vertical vibration, Jurnal of Biomechanics, Vol.22, Issue 2,pp 81-94, 1989
21.
G. NENCIU Biomecanica în educaţie fizică şi sport, Aspecte generale. Editura Fundaţiei România de Mâine, București 2005 , ISBN 973-725-369-8
22.
Goel, Vijay K.,Schimmels, J. M., ș.a
Contributions of Mathematical Models in the Understanding and Prevention of the Effects of Whole-Body Vibration on the Human Spine, CRC Press LLC, 2001, pag. 20;
23.
Griffin, M.J. Vibration and human responses , Handbook of Human Vibration London. Academic Press. Inc.2000.
24.
Griffin, M.J. The Validation of Biodynamic models, Clinical Biomechanics,16, Supplement No. 1:S81-S92,2001.
25.
Griffin, M.J. și Huang Y.
Effect of seat surface angle on forces at the seat surface during whol-body vertical vibration , Journal Of Sound and Vibration, Vol. 284, Issue 3-5, 21 pp613-634, 2005
26.
Ifrim M., Iliescu A. Anatomia și biomecanica educației sportive și sportului, Editura Didactica și Pedagogică, București, 1978
27.
ISO 2631-1 :1997 Mechanical vibration and shock- Evaluation of human exposure to whole-body vibration
28.
Karakasis, K., Skarlatos, D. și Zakinthinos, T.
A factorial analysis for the determination of an optiman train speed with a desired ride confort. Applied Acustics, 66(10), 1121-1134, 2005
68

29.
Kjellberg, A., Wikstrom, B.O., Landstrom,.
Injuries and other adverse effects of ocuppational esposure to ehole body vibration. A review for criteria document Arbete och halsa vetenskapling skriftserie 41. 1-80, 1994
30.
Lallemand J.P., Zeghloul S.
Robotique.Aspects foundamentaux, Ed. Masson, Paris, 1994
31.
Liu, X.X.,Shi, J.,Li, G.H.
Biodynamic response and injury estimation of ship personnel to ship shock motion induced by underwater explosion, Proceeding of 69th Shock and Vibration Symposium, vol. 18, St. Paul, 1998, pag. 1–18;
32.
M. Vlad Performanțe actuale în modelarea biomecanică a organismului uman sub acțiunea vibrațiilor, Raport de cercetare științifică nr.1, Scoala Doctorală U.T.C.B. București,2014
33.
M. Vlad, N.L. Hornea
Vibrațiile mecanice în mediu înconjurător. Al XIX-lea Simpozion național de utilaje pentru construcții.Secția I. București, 12-13 Decembrei 2013, ISSN 2285-9209
34.
Magheți, I. șiSavu, M.
Teoria și practica vibrațiilor mecanice , Editura Didactică și Pedagogică , 2007
35.
Magheți, I.,Savu, M.
Vibrații mecanice. Teorie și practică, ISBN 973-648-389-4, Editura BREN,București, 2004;
36.
McKerrow P.J. Introduction to tobotics, Ed. Addison-Wesley, Sydney,1991
37.
Miwa, T. Studies on hand protectors for portablevibrating tools, Industrial Health,1964;
38.
Muksian, R.,Nash, C.D.
On frequency-dependent damping coefficients in lumped-parameter models of human beings, Journal of Biomechanics 9 (1976), pag. 340–342;
39.
Nawayseh, N. și Griffin, MJ
Non-linear dual-axis biodynamic rsponse to vertical whole-body vibration, Journal Of Sound and Vibration, Vol.268. Issue 3, 27 pp 503-523, 2003
40.
Papilian V. Anatomia Omului, vol1 Aparatul locomotor, Editura Didactică și Pedagogică-București, 1982
41.
Patil, M.K., Palanichamy, M.S., Ghista, D.N
Dynamic response of human body seated on a tractor and effectiveness of suspension systems, SAE Paper 770932, (1977), pag. 755–792
69

42.
Qassem, W.,Othman, M.O.
Vibration effects on sitting pregnant women—subjects of various masses,Journal of Biomechanics 29 (4), 1996, pag. 493–501;
43.
R. Ciprian Contribuţii la studiul elementelor de protezare obţinute prin Prototipare RapidăUniversităţii Teză de doctorat „Transilvania” din Braşov
44.
R. Panaitescu-Liess Modelarea biomecanică a organismului uman sub acțiunea vibrațiilor, Teză de doctorat, UTCB, București 2013
45.
R. Penrose Mintea noastră…cea de toate zilele, ISBN 973-31-1589-4, Editura Tehnică, București, 2001, pag. 183;
46.
Rasmussen, G. Human body Vibration Exposure and is Mesrurmet , in Bruel & Kjaer brochure, 1996
47.
Rasmussen, G. Human Body Vibration Exposure and its Measurement, Bruel & Kjaerbrochure, 1996, pag. 5;
48.
Strogatz, Steven Nonlinear Dynamics And Chaos: With Applications To Physics, Biology, Chemistry, And Engineering, ISBN-13: 978-0738204536 , (2015) , USA
49.
Suggs, C.W.,Abrams, C.F.,Stikeleather, L.F.
Application of a damped spring-mass human vibration simulator in vibration testing of vehicle seats, Ergonomics, 1969;
50.
Truța, A.,Arghir, M.
Noțiuni de biomcanica organismului uman în mediu vibrațional, ISBN 978-606-92133-3-9, Arcadia Media, Cluj-Napoca, 2010, pag. 69;
51.
Yan, Jun A computer simulation model of the human head-neck musculoskeletalsysyem, A Thesis presented for the Graduate Studies Council, TheUniversity of Tennessee, Health Science Center, December, 2006;
52.
Zatsiorsky V.M. Kinematics of human motion, Ed. Human kinetics, USA, 1998
**SURSĂ COPERTĂ. ..WWW.PORTFOLIOBIOMECANICABRUNA.BLOGSPOT.RO (2014)
70