Embed Size (px)
Citation preview

Referat iz tehničkog i informatičkog obrazovanja
OŠ ,,Branko Radičević”
1. Konstrukcija robota
2. Interfejs sistem veza sa računarom
3. Portovi računara
Nastavnici: Gordana Vukčević Učenik: Marko Momir Cvejić Dimitrijevic

1. KONSTRUKCIJA ROBOTA
Iako je teško dati opštu definiciju robota, mi ćemo za robota reći da je kompjuterski-kontrolisana mašina koja je programirana da se kreće, manipuliše objektima i da izvršava posao. Roboti su u stanju da izvrše određene zadatke brže, jeftinije i češće nego ljudi. Termin robot potiče od češke reči "robota" koja znači teški rad. Prvi put je upotrebljena 1921. godine u naučno-fantastičnom komadu R. U. R. (Rosumovi Univerzalni Roboti), češkog pisca Karela Čapeka. On je tako nazvao mašinu u obliku čoveka, namenjenu za obavljanje teških poslova. Koncept automatizovane mašine datira još iz antičkih vremena i mitova o mehaničkim stvorenjima. Razvoju modernog robota prethodio je razvoj veštačke ruke, ili manipulatora.
Što se tiče proizvodnje čovekolikih robota prvo mesto zauzimaju
korporacije iz Japana, pri čemu su najbolje Honda i Sony. . Honda je novembra 2000 predstavila je prvu verziju ASIMO (Advanced Step in Innovative Mobility) robota. Robot je bio visok 1,20 m, a težak 54 kg (slika 1.1)
Slika 1.1 Asimo

Mehanika robota
Robot se sastoji od elemenata (segmenata) koji su čvrsto spojeni ili se mogu pomerati. Dva međusobom povezana-pomerljiva elementa robota čine kinematički par. Nizovi tela povezanih kinematičkim parovima nazivamo kinematičkim lancima. Za ostvarivanje kretanja i prenošenje određenog opterećenja robota koriste se razni elementi i prenosni mehanizmi, a najčešće se koriste: poluge, zupčasti i lančasti prenosnici. Osim toga, kod robota se primenjuju i specifični uređaji, kao što su senzori na pritisak, senzori na svetlost, elektroprekidački senzori, senzori za kontrolu položaja (potenciometri, brojači itd.).
Pogon robota
Pogonski sistemi koji se najčešće koriste u robotici su različite vrste elektromotora, a to su električni, hidraulični i pneumatski.
Pogon robota je najčešće električni: elektromotorima jednosmerne struje i ređe elektromagnetima. Tada je potrebno da se obrtno kretanje prilagodi potrebnom kretanju. Zato se elektromotori obično sprežu sa nekim od prenosnika, na primer, pužnim reduktorom zbog prilagođavanja brzine najčešće obrtanja. Ponekad se primenjuju i hidraulični pogon robota, kada se koriste hidraulični cilindri, ili hidraulični motori.
Pogonski motori robota deluju većinom u zglobovima mehanizma izazivajući pomeranja u zglobovima. Tako, pokrećući zglobove motori pokreću ceo robot. Jedan od prestavnika takvih motora je Magmotor, a koriste se i razni mikromotori.

Robotska ruka
Upravljanje robotima
Upravljanje robotima možemo definisati na sledeći način: Obezbediti takvu promenu upravljačkih veličina koja će proizvesti zadato kretanje u zglobovima robota. Dakle, zadatak se svodi na zadato pokretanje zglobova.
Postoje dva načina upravljanja: - po otvorenoj i - zatvorenoj sprezi.
Po otvorenoj sprezi elementima robota se zadaje kretanje i registruje stanje samo kad je kretanje izvršeno za nastavljanje ciklusa.

Po zatvorenoj sprezi elementu robota se zadaje kretanje i odmah se dobija podatak o izvršenju, vrši upoređenje sa zadatim kretanjem i automatska korekcija kretanja.
Najjednostavnija realizacija upravljanja robotom postiže se korišćenjem računara.
Tada se postavljeni zadatak lako realizuje korišćenjem određenog programa i uključenjem/isključenjem upravljačkog relejnog sistema preko interfejsa u realnom željenom vremenu.
U vezi konstrukcije i dizajna ima više vrsta robota. Postoje roboti koji se koriste kao napr. igračke. Karakteristika im je da obuhvataju i više kretanja: trčanje, bacanje, udaranje, zamah, igru i dr. Ovi i njima slični roboti predstavljaju početak veštačke inteligencije moćnih i inteligentnih robota, koji su vrlo značajni za budućnost.
2. INTERFEJS SISTEM VEZA SA RAČUNAROM
Prvi računar sa zapamćenom memorijom napravljen je 1949. godine i zvao se EDSAC izgrađen na Univerzitetu Kembridž u Velikoj Britaniji. Njegov autor bio je Moris Vilks (Maurice Wilkes). Njega su sledili JOHNIAC napravljen u firmi Rand Corporation, ILLIAC napravljen na Univerzitetu u Ilinoisu, MANIAC iz Los Alamos Laboratory i WEIZAC sa Vajcmanovog instituta u Izraelu.
Ekert (J. Presper Eckert) i Džon Mokli (John Mauckley) su počeli da rade na narednom računaru EDVAC (Electronic Discrete Variable Automatic Computer), ali je taj projekat bio fatalno ugrožen kada su njih dvojica napustila Univerzitet u Pensilvaniji radi osnivanja kompanije u Filadelfiji (Eckert-Mauchley Computer Corporation).

U međuvremenu Džon fon Nojman (John von Neumann) je otišao na Prinstonov Institut za napredne studije da bi radio na sopstvenoj verziji EDVAC-a, koju je nazvao IAS mašina. U vreme kada je počeo da se bavi računarima fon Nojman je bio jedan od najvećih matematičara toga doba. Za njega kažu da je bio genije kalibra Leonarda da Vinčija. Govorio je više jezika, bio je stručnjak za fiziku i matematiku i mogao je da se priseti svega što je ikada čuo, video ili pročitao.
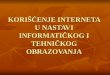
Fon Nojman je zaključio da je programiranje računara pomoću velikog broja prekidača i kablova sporo i teško, i da je bolje program predstaviti u digitalnom obliku u memoriji računara. On je takođe shvatio da je, umesto decimalne aritmetike bolje koristiti binarnu aritmetiku. Njegov arhitekturni princip, poznat kao fon Nojmanova mašina, primenjen je kod prvog računara sa zapamćenim programom EDSAC, i još uvek je osnova za gotovo sve računare i do današnjih dana. Ova arhitektura, kao i IAS mašina koju je fon Nojman izradio u saradnji sa Hermanom Goldštajnom (Herman Goldstine), imala je ogroman uticaj na dalji razvoj računara. Skica ove arhitekture je prikazana na slici 2.1.
Slika 2.1 Originalna fon Nojmanova mašina
Upravljačka jedinica
Arimetričko logička jedinica
Ulaz
Izlaz
Memorija
Akumulator

Fon Nojmanova mašina je imala pet osnovnih delova: memoriju, aritmetičko logičku jedinicu, jedinicu za upravljanje programom i ulaznu i izlaznu opremu. Memorija se sastojala od 4096 reči od kojih je svaka imala 40 bitova. Svaka reč je sadržala ili dve 20-bitne instrukcije ili dva 39-bitna označena cela broja. Osam bitova instrukcije je definisalo operaciju, a prostalih 12 je specificiralo reč u memoriji.
Unutar aritmetičko logičke jedinice, preteča savremene CPU (Central Processing Unit) je bio specijalni interni 40-bitni registar nazvan akumulator. Tipična instrukcija, na primer, sabira memorijsku reč sa sadržajem akumulatora ili upisuje sadržaj akumulatora u memoriju. Mašina nije imala aritmetiku u pokretnom zarezu, jer je fon Nojman smatrao da će svaki kompetentni matematičar moći da sam odredi poziciju decimalne tačke.
Recimo nekoliko reči i o softveru. Jezik na kome se programiralo bio je mašinski jezik - jezik nula i jedinica. Programi na takvom jeziku bili su nepregledne liste redova ispisanih nulama i jedinicama. Pisanje takvih programa bilo je mukotrpno, njihovo čitanje još teže, a najgore je bilo pronaći grešku u programu. Uz sve to, mašinski jezici (kako im to i ime kaže) su mašini orijentisani: drugi računar - drugi jezik. Takve računare mogli su da programiraju samo oni koji su dobro poznavali njihovu arhitekturu. Vrlo brzo su programeri počeli da razmišljaju o tome kako da svoje programe skrate i učine jasnijim pa su se dosetili da binarne nizove pretvore u brojeve u dekadnom, a kasnije u heksadekadnom brojnom sistemu. Ovo je tek malo smanjilo fizički obim listinga programa, a uvelo je potrebu za prvim rudimentarnim prevodiocima koji su prevodili dekadne, odnosno heksadekadne brojeve, nazad u binarni sistem (računari su još uvek, pa i danas, razumevali isključivo mašinski jezik). Nešto kasnije su uvedeni asemblerski jezici, ili jezici II generacije, gde su naredbe predstavljane simboličkim oznakama. Ovo je dovelo do daljeg smanjenja obima programa, do nešto bolje čitljivosti, ali i do složenijih prevodilaca - asemblera. Međutim, i dalje se radi o mašini orijentisanim jezicima, a odnos broja naredbi mašinskog i asemblerskog jezika je 1:1. O operativnim sistemima nije bilo ni govora. Sve potrebne radnje je uglavnom izvršavao sam operater.

3. PORTOVI RAČUNARA
Računar može da razmenjuje informacije i sa spoljnim (perifernim) uređajima. Ti uređaji se priključuju na računar preko digitalnih priključnika koje zovemo portovi.
Postoje različite vrste portova kao što su:- serijski ili paralelni port,- gejm port,- USB port,- Infra Red – infracrveni port i- Bluetooth – blutut port-
Serijski i paralelni port
Serijski (slika 3.1) i paralelni (slika 3.2) port PC računara spada u najvažnije portove preko kojih PC računari komuniciraju sa svojom okolinom. Na ovaj port se pre svega priključuje štampač ali je on dostupan i drugim uređajima koji pravilno koriste njegove signale. Uređaji - interfejsi koji se priključuju na ovaj port moraju biti programski podržani.
Ovi portovi mogu da rade na sledećih pet načina rada:Kompatibilni način (Compatibility mode) Nibl način (Nibble mode)Bajt način (Byte mode)ECP način (Extended Capabilities Port Mode)EPP način (Enhanced Parallel Port Mode)

Slika 3.1 Serijski port Slika 3.2 Paralelni port
Gejm port
Gejm port (Games port, slika 3.3) koristi se najčešće za priključivanje pomagala za igranje igara - džoistika, volana i sl. Ovi portovi se koriste i za ostvarivanje veze između računara i muzičkih instrumenata. Gejm port se može koristiti i za priključivanje drugih uređaja, izuzev onih koji su prilagođeni na druge, već pomenute vrste portova.
Slika 3.3 Gejm port

USB port
USB port (Universal Serial Bus, slika 3.4) nadmašuje sve ostale vrste portova. Omogućuje serijski prenos podataka brzinom 12 Mb\s. Postoje razne varijante a na USB može se priključiti ukupno 128 uređaja. Veoma je brz i jednostavan za korišćenje. Zbog velike popularnosti i traženosti, nasatale su nove generacije USB priključaka nazvane USB 2.0 sa brzinom prenosa čak 480 Mb\s i USB 3.0 sa 4.8 Gb\s.
Slika 3.4 USB priključak
Infra Red port
Veza za prenos podataka Infra Red (infracrvenim, slika 3.5) portom ne ostvaruje se preko kabla nego preko infracrvenih zraka. Oni nisu vidljivi u ljudskim okom i ima ih jako malo u pirodi. Port podržava brzinu prenosa od 4 Mb\s i oba uređaja moraju posedovati infracrveni port. Razdaljina sa koje se informacije mogu preneti je mala, 1 do 2 metra i ne sme biti nikakvih prepreka između zraka prilikom prenosa podataka. Ovaj prenos se uglavnom koristi za razmenu podataka mobilnim telefonom, ali je u skorije vreme već prevaziđen stvaranjem Bleutooth porta.

Slika 3.5 Infra Red port
Bluetooth port
Bluetooth (blutut, slika 3.6) port se koristi za prenos podataka na male razdaljine, oko 10 metara. Uglavnom se koristi za razmenu podataka između prenosnih uređaja - laptopa, mobilnog itd. Funkioniše putem signala koji se prostiru u krugu određene širine i prenos podataka može se obavljati samo između dva uređaja istovremeno. Veoma je bitno ime uređaja pri prenosu, jer signal može uhvatiti više uređaja sa uključenin blututom, da bi se znalo na koji uređaj se šalju podaci.
Slika 3.6 Bluetooth port