-
8. OCJENA KVALITETA PONAANJA SISTEMA AUTOMATSKOG UPRAVLJANJA I
KRITERIJI ZA SINTEZU
[15, 31, 54, 66, 69, 70, 71, 77, 83, 84]
Pri projektovanju sistema automatskog upravljanja moraju se
analizirati odreeni uslovi rada, te pokuati zadovoljiti prema
sljedeem redosljedu: stabilan rad sistema se mora obezbijediti;
dobro ponaanje odziva-stanja sistema u stacionarnom reimu, koji
nastupa dovoljno dugo vremena nakon poetnog trenutka dejstva
ulaznog signala ili poremeaja; kvalitetan prelazni reim sistema; i
brz odziv.
Ovim redosljedom se vri analiza i sinteza sistema, jer nema
smisla govoriti o odzivu sistema u stacionarnom reimu ako
posmatrani sistem nije stabilan (kod nestabilnih sistema
stacionarni reim po prirodi je razliit od eljenog). Takoe se ne moe
govoriti o kvalitetu prelaznog reima ako nisu ispunjeni uslovi za
rad sistema u stacionarnom reimu rada.
Tehnika projektovanja sistema automatskog upravljanja se svodi
na zadovoljavanje jednog ili vie kriterija, koji u praksi mogu biti
zasnovani na:
- ocjeni tanosti i odstupanju objekta upravljanja od zadanog
i/ili poeljnog stanja, na ta ukazuje regulaciona greka. Poznato je,
da je greka neminovna u toku prelaznog reima, ali se esto
pojavljuje i poslije prelaska objekta upravljanja u novo
stacionarno stanje, kada se govori o statikoj greki.Takoe se moe
govoriti i o komponentama dinamike greke, od kojih svoju
fizikalnost imaju greke koje su posljedica promjena brzine i
ubrzanja zadane vrijednosti;
- procjeni priguenja objekta upravljanja, to u biti predstavlja
procjenu odstojanja objekta upravljanja od granice stabilnosti;
i
- istovremenom ocjenjivanju vie pokazatelja o ponaanju objekta
upravljanja, to omoguavaju kompleksni ili integralni kriteriji.
Svi navedeni kriteriji se baziraju na predpostavci o poznavanju
dinamike objekta upravljanja, kao i potrebnom zadovoljenju zadanog
i definisanog pokazatelja kvaliteta upravljanja. To znai da se
moraju imati odreene informacije o objektu upravljanja na osnovu
kojih e se izvesti projektovanje sistema automatskog upravljanja. U
zavisnosti od toga koje se informacije o objektu poznaju,
projektovanje se moe izvesti na osnovu:
- poznate prenosne funkcije )s(Q/)s(P)s(G nm= , odnosno same
karakteristine jednaine 0)s(Qn = ;
- poznate amplitudno fazne karakteristike ili poznatih Bodeovih
dijagrama; i - analize dijagrama vremenskog odziva na poznati
pobudni signal, kao to su
odskoni, impulsni i/ili prostoperiodini odziv.
Prije svega, zgodno je razmotriti osnovnu i najee susretanu
strukturnu emu rada sistema upravljanja. U direktnoj grani se ima
serijska veza bloka regulatora i bloka objekta
-
8. Ocjena kvaliteta ponaanja SAU i kriteriji za sintezu
268
upravljanja u irem smislu, a zatvoreni su jedininom negativnom
povratnom spregom, slika 8.1.
Na slici 8.1 je: )s(U kompleksni lik zadane vrijednosti signala
na ulazu )t(u ; )s(Gr prenosna funkcija regulatora; )s(Go prenosna
funkcija objekta u irem smislu, to u praksi predstavlja serijsku
vezu prenosnih funkcija izvrnog organa, samog objekta upravljanja i
transmitera; )s(X kompleksni lik upravljanog signala koji je mjerni
ekvivalenat upravljane veliine )t(x ; )s(E kompleksni lik signala
greke )t(e ili regulacionog odstupanja koje treba uiniti to manjim.
Sa slike je oigledno:
)t(x)t(u)t(e = (8.1)
Slika 8.1. Strukturna ema rada sistema upravljanja
Idealno bi bilo da se uspije zadovoljiti uslov da je 0)t(e , t ,
to je teko ispuniti jer svaki elemenat u strukturi upravljanja ima
inerciju. Zadani signal )t(u se jo naziva referentnim signalom.
Sistemi automatskog upravljanja (SAU) se mogu, prema namjeni,
podijeliti na odreene skupine.
1. Sisteme stabilizacije. Ovi sistemi imaju .konst)t(u = , a
osnovni zadatak im je da izlaznu veliinu odravaju konstantnom. Tako
je za analizu, bez umanjenja optosti, mogue traeni konstantni nivo
smatrati nultim i usvojiti da je 0)t(u . Zato se moe predpostaviti
da se ima struktura sistema kao na slici 8.2.
Slika 8.2. Pojednostavljena struktura upravljanja
G (s)U(s) +
_
X(s)G (s)or
E(s)Zadanisignal Regulator Objekat u
irem smislu
Spoljni ili unutranjiizvor smetnji (uticaja)
G(s)U(s) +
_
X(s)E(s)
-
Linearni sistemi automatskog upravljanja
269
Na slici 8.2 prenosnu funkciju otvorenog sistema )s(G ini
serijska veza regulatora i objekta upravljanja u irem smislu, pa je
odreena proizvodom ovih prenosnih funkcija, tj.
)s(G)s(G)s(G or= . Sa slike 8.2 se vidi da je:
)s(U)s(G1)s(G)s(X
+= (8.2)
Dalje je:
)s(U)s(G11)s(U)s(G1
)s(G)s(U)s(X)s(U)s(E+
=
+== (8.3)
Za svaki sistem upravljanja u praksi se mora obezbijediti uslov
stabilnosti, tj. da sistem nakon poetne perturbacije pree u novo
stacionarno stanje. Zato se na relaciju (8.3) mora moi primjeniti
osobina Laplaceove transformacije o izraunavanju krajnje
vrijednosti, ijom se primjenom dobija da je:
[ ]0s0stt )s(G1
)s(sU)s(sElim)t(x)t(ulim)t(elim)(e
+==== (8.4)
gdje je )(e greka u novom stacionarnom stanju ili statika greka,
koja zavisi od prenosne funkcije sistema u otvorenom, a koja se moe
predstaviti u obliku razlomljene racionalne funkcije:
n1n1n
1n
0
m1m1m
1m
0
n
m
asasasa
bsbsbsb)s(Q)s(P)s(G
++++
++++==
L
L (8.5)
a poto je u praksi mn > , to je:
pn
m
0s0sK
a
b)s(Glim)s(G ===
(8.6)
gdje je pK koeficijent pojaanja ili konstanta poloaja. U sluaju
da se u povratnoj grani na slici 8.2 ima blok )s(H , blok struktura
bi izgledala kao na slici 8.3. U ovom sluaju relacija (8.3) bi
imala oblik:
)s(U)s(H)s(G11)s(E
+= (8.7)
dok bi relacija (8.4) imala oblik:
-
8. Ocjena kvaliteta ponaanja SAU i kriteriji za sintezu
270
[ ]0s0stt )s(H)s(G1
)s(sU)s(sElim)t(x)t(ulim)t(elim)(e
+==== (8.8)
odakle se zakljuuje da bi se na isti nain odreivala tanost
ponaanja sistema u novom stacionarnom stanju.
Slika 8.3. Blok struktura sistema upravljanja kada se u
direktnoj grani nalazi blok G(s) a u grani povratne sprege blok
H(s)
2. Sistemi pozicionog upravljanja. Kod ovih sistema pobuda )t(u
je konstantna u pojedinim intervalima vremena, tj. )t(u se mijenja
prema zakonu odskone funkcije i ima konstantnu amplitudu u
pojedinim intervalima vremena t , to se moe prikazati kao na slici
8.4.
Slika 8.4. Izgled pobudnog signala kod sistema pozicionog
upravljanja
Izlaz sistema treba da prati ulaz, ali zbog inercije sistemu je
potrebno neko vrijeme da bi se zauzelo novo stanje. Tipini primjeri
ovih sistema su servomotori kao npr. promjena poloaja osovine. Ovi
sistemi imaju svoju konstantu poloaja. Neka je, po predpostavci,
ulazna funkcija u obliku odskone funkcije amplitude 0r . Ako se
jedinina odskona funkcija oznai kao )t(h , tada se u pojedinim
vremenskim intervalima moe pisati da je:
s
r)s(U)t(hr)t(u 00 == (8.9)
U(s) E(s)
Y(s)
G(s)
H(s)
X(s)_
0
t
u(t)
-
Linearni sistemi automatskog upravljanja
271
pa se na osnovu (8.4) dobija da je greka u novom stacionarnom
stanju:
( )p
0
0s
0
K1r
)s(G1s/rs)(e
+=
+=
(8.10)
gdje je )s(GlimK0sp
= konstanta poloaja. Ako sistem nema astatizma tada je 0r = , pa
je 0)(e ali konano, razmatrani sistem je statiki, odnosno javlja se
konana statika
greka. Grafik pobudnog signala i odziva sistema s jasno
naznaenim prelaznim reimom i stacionarnim stanjem, je prikazan na
slici 8.5. Statika greka je oznaena kao )(e i predstavlja razliku
izmeu pobude i odziva sistema u novom stacionarnom stanju. Sa slike
8.5 se vidi da je ovo primjer kod kojeg statika greka nije
eliminisana, tj. 0)(e .
Slika 8.5. Prikaz prelaznog reima i stacionarnog stanja
3. Sistemi upravljanja po brzini (brzinski servosistemi). Ovi
sistemi imaju zadatak da upravljaju npr. brzinom vrtnje motora.
Upravljajui brzinom, oni zadravaju poziciju koja se mijenja u
segmentima vremena po nekom linearnom zakonu. Ako se predpostavi da
je ulazna funkcija u obliku nagibne funkcije ili "rampe", pri emu
je
)t(h jedinina odskona funkcija:
)t(htv)t(u 0 = , .constv0 = (8.11)
tada je kompleksni lik ulaza:
20 s/v)s(U = (8.12)
pa je stacionarna greka:
( )v
0
0s
20
Kv
)s(G1s/vs)(e =
+=
(8.13)
u(t)x(t)
PRELAZNIREIM
u(t)
x(t)u(t)= r h(t)0
t
STACIONARNOSTANJE
e( )
-
8. Ocjena kvaliteta ponaanja SAU i kriteriji za sintezu
272
gdje je:
)s(sGlimK0sv
= (8.14)
i naziva se konstanta pojaanja po brzini ili brzinska konstanta
sistema. Ako je ulazna funkcija rampa, tada (8.13) daje konanu
vrijednost samo za sisteme )s(G koji imaju astatizam prvog reda,
odnosno kada je 1r = , tj.:
)s(sQ)s(P
K)s(G1n
m
= (8.15)
Za sluaj da sistem )s(G nema astatizma, tj. kada je 0r = , greka
bi bila beskonano velika, dok u sluaju da je 1r > greka bi bila
0)(e = , ali u oba ova sluaja nije mogue postii eljeni kvalitet
upravljanja. Sluaj kada je 1r = prikazan je na slici 8.6.
Slika 8.6. Grafik ulaza i izlaza brzinskog servomehanizma kada u
direktnoj grani imamo astatizam prvog reda
Neka sada, prema predpostavci, na ulazu sistema koji je prikazan
na slici 8.2 djeluje funkcija koja se mijenja po zakonu:
)t(hta21)t(u 20 = (8.16)
pri emu je h(t) jedinina odskona funkcija. U ovom sluaju se moe
definisati konstanta pojaanja po ubrzanju, ako je .consta0 = . Sada
je kompleksni lik ulaza:
30 s/a)s(U = (8.17)
pa se statika greka )(e moe odrediti kao:
tSTACIONARNIREIM
u(t)x(t)
x(t)u(t)
=
v th(t)
e( ) = vvKo
o
-
Linearni sistemi automatskog upravljanja
273
( )a
0
0s
30
Ka
)s(G1s/as)(e =
+=
(8.18)
gdje je:
)s(GslimK 20sa
= (8.19)
i naziva se konstanta pojaanja po ubrzanju sistema. Ona e imati
konstantnu vrijednost samo u sluaju kada sistem u direktnoj grani
ima astatizam drugog reda, tj. za 2r = . Ako je red astatizma 2r
< ova komponenta greke bi bila beskonano velika, dok u sluaju da
je red astatizma 2r > ova komponenta greke bi bila ravna
nuli.
4. Sistemi programskog upravljanja. Kod ovih sistema )t(u je
unaprijed zadana programirana funkcija.
8.1. Komponente greke koje su posljedica promjene ulaza i
dejstva smetnje
U prvu grupu greaka koje karakteriu )t(e spadaju greke u
stacionarnom stanju, a nastaju kao promjena )t(u ili kao posljedica
djelovanja jednokratne smetnje. Ako u sistemu automatskog
upravljanja dejstvuje neka smetnja )s(Fk , to se vidi na slici
8.7a, tada je istu poeljno preslikati na izlaz, slika 8.7b, ili na
ulaz, slika 8.7c.
Tako je na osnovu slike 8.7 mogue dobiti dvije ekvivalentne eme,
na kojima su smetnje koje djeluju na objekat u irem smislu
preslikane na izlaz, slika 8.8a, ili na ulaz, slika 8.8b. U
obadvije eme na slici 8.8 je:
)s(G)s(G)s(G or= (8.20)
Za emu sa slike 8.8a se moe odrediti E(s) i na nju primjeniti
osobina Laplaceove transformacije za izraunavanje konane
vrijednosti. Poto se radi o klasi linearnih sistema, tada e
vrijediti princip superpozicije. Tako je prvo mogue predpostaviti
da na sistem ne djeluju smetnje, tj. da je:
0)t(f i ; i=1,2,,n (8.21)
i odrediti prvu komponentu greke )s(E1 koju je prouzrokovala
promjena )s(U . Sada je:
)s(E)s(G)s(X 1=
-
8. Ocjena kvaliteta ponaanja SAU i kriteriji za sintezu
274
)s(E)s(G)s(U)s(X)s(U)s(E 11 == (8.22)
a)
b) c)
Slika 8.7. Dejstvo smetnje na sistem (a) i njeno preslikavanje
na izlaz (b) i/ili na ulaz (c)
Iz (8.22) se dobija da je promjena )s(E , usljed promjene )s(U
pri 0)t(f i , ravna:
)s(U)s(G11)s(E1 += (8.23)
a)
G (s)
F (s)k+
++G (s)k-1 k
PRESLIKAVANJE NA IZLAZ
G (s)
+++
G (s)k-1
k
k
F (s)k
G (s)+
++
G (s)k-11
PRESLIKAVANJE NA ULAZ
F (s)k
G (s)k-1 kG (s)
F (s)1
+++
F (s)2
+++
F (s)n
+++
....
X(s)U(s)G(s)
G (s) F1 G (s) F G (s) F2 n....
_
-
Linearni sistemi automatskog upravljanja
275
b)
Slika 8.8. Preslikavanje smetnji koje djeluju na objekat
upravljanja u irem smislu na izlaz (a) i/ili na ulaz (b)
U drugom sluaju se predpostavlja da je 0)s(U = , a potom odredi
komponenta greke )s(E2 koja je posljedica dejstva smetnji na
sistem. Sada je:
+== =
)s(F)s(G)s(E)s(G)s(X)s(E in
iFi
122
[ ] =
=+n
iiF )s(F)s(G)s(G)s(E i
12 1 (8.24)
pa je komponenta greke )s(E2 , koja je posljedica dejstva
smetnji na sistem, ravna:
)s(G
)s(F)s(G)s(E
i
n
iFi
+=
=
11
2 (8.25)
Po principu superpozicije, ukupna greka E(s) je ravna:
)s(E)s(E)s(E 21 += (8.26)
Neka se, prema predpostavci, ima specijalan sluaj kada nema
dejstva smetnji na sistem. Neka je do trenutka 0t = , kada se
poinje posmatrati sistem, bilo i 0)t(e = i neka je u tom trenutku
dolo do promjene zadane-referentne vrijednosti )t(u . Sada se
posmatra ta se deava nakon vremena potrebnog da se uspostavi
stacionarno stanje, tj. nakon prelaznog procesa. Neka je dejstvo na
sistem u obliku odskone funkcije:
+++
+++
+++
.... G(s)
F (s)1 F (s)2 F (s)n
G (s) F1 G (s) F G (s) F2 n
U(s) X(s)
....
_
-
8. Ocjena kvaliteta ponaanja SAU i kriteriji za sintezu
276
{ }s
r)t(hrL)s(U)t(hr)t(u 000 === (8.27)
gdje je )t(h jedinina odskona funkcija:
=
+=
00000
0 r,
r,
)s(KP)s(Qs)s(Qsr
limmrn
r
rnr
s (8.32)
Ako se uvede oznaka:
)s(Qs)s(KPlim)s(GlimK
rnr
m
0s0sp
== (8.33)
tada je:
-
Linearni sistemi automatskog upravljanja
277
p
0
0s
000s1t K1
r
)s(Glim1r
)s(G1r
lim)t(elim+
=
+=
+=
(8.34)
Vidi se da u sluaju kada analizirani sistem posjeduje astatizam,
0r , i npr. ako se ima astatizam bar prvog reda tada je =pK , pa je
greka poslije zavretka prelaznog procesa ravna nuli:
0)t(elim 1t
=
(8.35)
i nema greke u stacionarnom stanju, tj. statika greka je nulta.
Za sluaj kada je 0r = , koeficijent pK ima neku konanu vrijednost i
naziva se koeficijent pojaanja sistema. Poto je ( )p01
tK1/r)t(elim +=
, to slijedi da se statika greka moe smanjiti poveanjem
pojaanja regulatora. Meutim, ovo pojaanje se ne moe poveevati u
beskonanost, kada bi se u potpunosti eliminisala greka u novom
stacionarnom stanju, ali se moda moe svesti u tehnologijom
dozvoljene granice odstupanja oko zadane vrijednosti. Druga
mogunost uticaja, pa i potpunog eliminisanja statike greke, je
preko astatizma sistema. Kako objekti obino ne posjeduju astatizam,
to je neophodno u regulator koji je opisan prenosnom funkcijom
)s(Gr , uvesti astatizam bar prvog reda, tj. potrebno je koristiti
npr. PI regulator.
Jo je potrebno posmatrati uticaj promjena smetnje, npr. po
zakonu odskone funkcije, tj.:
s
1f)s(F 0kk = (8.36)
gdje je 0kf amplituda tih promjena.
U ovom sluaju prenosna funkcija u odnosu na greku mora imati
astatizam bar prvog reda da se nebi unosila trajna statika greka.
Ako se pogleda sliku 8.9, tada smetnja )s(F2 nee reprodukovati
trajnu statiku greku, dok e smetnja )s(F1 proizvoditi trajnu
statiku greku ako sistem, koji je opisan prenosnom funkcijom )s(G ,
ne posjeduje astatizam.
Slika 8.9. Dejstvo smetnji na sistem u obliku odskone funkcije i
njihov uticaj na statiku greku
G (s)1sU(s) +
_
F (s)1 F (s)2
X(s)++ ++
-
8. Ocjena kvaliteta ponaanja SAU i kriteriji za sintezu
278
Neka se sada ima brzinski servomehanizam za koji je:
)t(htv)t(u 0= (8.37)
Ako je .constv0 = , t tekue vrijeme, a )t(h jedinina odskona
funkcija, tada je 2
0 s/v)s(U = , to bi komponenta greke koja je posljedica
eventualnih promjena brzine bila:
( ))s(G1sv)s(E 2
01
+= (8.38)
pa bi statika greka, razlika izmeu zadane i stvarne vrijednosti
poslije zavretka prelaznog procesa, bila:
=
+==
)s(G1v
s
1lim)s(sElim)t(elim 00s10s1t
v
000s
00s K
v
)s(sGvlim)s(sGs
vlim ==+
=
(8.39)
Da bi ova granina vrijednost bila ravna nuli potrebno je da )s(G
ima astatizam bar drugog reda. U posljednjoj relaciji je:
)s(sGlimK0sv
= (8.40)
i naziva se konstanta pojaanja po brzini. Za konane vrijednosti
vK stvarna vrijednost e biti razliita od zadane. Za sluaj da je 0K
v = , G(s) nema astatizma, tj. 0=r , greka e teiti u beskonanost.
Za prenosne funkcije koje imaju astatizam prvog reda )t(elim 1
t e
imati konanu vrijednost, koja je razliita od nule, odnosno, )t(x
e pratiti )t(u sa konanim odstupanjem. Tada se javlja konstantna
brzinska greka. Ova greka se moe smanjiti poveavanjem koeficijenta
pojaanja, ali samo do odreene rezerve stabilnosti (koeficijent
pojaanja pripada klasi realnih i fiziki ostvarivih sistema i ne moe
se poveavati u beskonanost). Dejstvo, odziv i pojava greke kod
brzinskog servomehanizma je prikazana na slici 8.10.
Takoe je mogue posmatrati i greku koja nastaje usljed promjene
ubrzanja referentnog signala. Neka je, prema predpostavci, dat
referentni signal:
)t(hta21)t(u 20= (8.41)
gdje je .konsta0 = , t je tekue vrijeme, a )t(h jedinina odskona
funkcija. Sada je:
-
Linearni sistemi automatskog upravljanja
279
30
s
a)s(U = (8.42)
Slika 8.10. Dejstvo, odziv i greka kod brzinskog
servomehanizma
Tako se dobija da je:
)s(Gssa)s(sE 22
01
+= (8.43)
Iz relacije (8.43) slijedi da je:
a
02
00s22
00s10s1t K
a
)s(Gsalim
)s(Gssalim)s(sElim)t(elim ==
+==
(8.44)
pri emu je:
)s(GslimK 20sa
= (8.45)
Kada je =aK komponenta greke tei nuli, ali u ovome sluaju )s(G
mora imati astatizam bar treeg reda r=3. Za sluaj kada je RK a \ {
}0 statika greka nije ravna nuli ali ima konanu vrijednost. U ovom
sluaju )s(G mora imati astatizam drugog reda. Za sluaj da je 0K a =
greka divergira. Ove mogunosti su prikazane na slici 8.11.
Neka se sada posmatra opti sluaj kada je )t(u proizvoljna
funkcija koja pripada klasi funkcija tipa poetnih uslova i iji je
kompleksni lik )s(U . Ve je odreena greka koja potie od promjena
ulaznog signala:
u(t)x(t)
t
u(t)
x(t)
e(t)
-
8. Ocjena kvaliteta ponaanja SAU i kriteriji za sintezu
280
)s(U)s(G11)s(E
+= (8.46)
Slika 8.11. Dejstvo, odziv i greka koja je posljedica promjene
ubrzanja referentnog signala
Statika greka moe biti odreena primjenom osobine Laplaceove
transformacije o konanoj vrijednosti:
)t(elim)s(sElim)(et0s
== (8.47)
Poznato je da stacionarna greka zavisi od spoljanjeg dejstva,
strukture samog sistema i parametara sistema. U sluaju da je ulazna
funkcija )t(u diferencijabilna u intervalu
-
Linearni sistemi automatskog upravljanja
281
0s0 )s(G1
1C=
+= ;
0s1 )s(G1
1s
C=
+
= ;
0s2
2
2 )s(G11
sC
=
+
= ;...; 0s
m
m
m )s(G11
sC
=
+
= ;... (8.51)
Generalisani koeficijent 0C se naziva koeficijent statike greke,
generalisani koeficijent 1C se naziva koeficijent greke po brzini,
a generalisani koeficijent 2C se naziva
koeficijent greke po ubrzanju. Reciprone vrijednosti
generalisanih koeficijenata 1C i 2C se zovu koeficijenti dobrote po
brzini i po ubrzanju, respektivno. Sada se mogu odrediti komponente
greke:
)t(uCe 00 = ; dt)t(duCe 1v = ; 2
2
2a dt)t(udCe = ;...;
m
m
mm dt)t(udCe = ;... (8.52)
pri emu je 0e statika greka, ve greka po brzini, a ae greka po
ubrzanju.
8.2. Procjena kvaliteta upravljanja na osnovu vremenskog toka
upravljane veliine
U praksi se esto puta pojavljuju problemi zbog nepoznavanja
prenosne funkcije u otvorenom )s(G , ili prenosne funkcije
zatvorenog sistema ))s(G1/()s(G)s(W += , ili karakteristine
jednaine 0)s(Qn = , ili amplitudno fazne karakteristike )j(G ili
Bodeovih dijagrama. U ovakvim sluajevima je najjednostavnije
snimiti odziv sistema )t(x na odskonu funkciju )t(u . Tipini odziv
sistema je prikazan na slici 8.12.
Slika 8.12. Odziv sistema na odskonu funkciju
u(t)x(t)
t
u(t)
x(t)
t1ts
x( )
x1max
2
-
8. Ocjena kvaliteta ponaanja SAU i kriteriji za sintezu
282
Analizom dijagrama sa slike 8.12 se dobija itavi niz korisnih
pokazatelja o kvalitetu upravljanja procesom. Dijagrami odziva
sistema mogu biti i drugaiji, pa su navedeni neki karakteristini
primjeri prelaznih procesa koji se esto pojavljuju u praksi. Neka
se ima struktura upravljanja kao na slici 8.13, tada su tipini
odzivi na jedininu odskonu funkciju
)t(h prikazani na slici 8.14.
Slika 8.13. Blok struktura sistema upravljanja u praksi
a) b)
c) d)
Slika 8.14. Tipini odzivi sistema upravljanja na jedininu
odskonu funkciju: jedinina odskona funkcija (a), odziv aperiodskog
bloka prvog reda (b),
lo kvazioscilatorni odziv (c) i dobar odziv sa malim prvim
preskokom (d)
Detaljan prikaz kvazioscilatornog odziva prikazan je na slici
8.15, gdje su kotirani neki od interesantnih parametara i dat
grafiki nain njihovog odreivanja. Na slici 8.15 je: ut vrijeme
uspona, kt vrijeme kanjenja, st vrijeme smirivanja prelaznog
procesa, pT kvazi
u(t) = h(t) +_
G (s)x(t)
u(t)
t
x(t) APERIODSKIODZIV
u(t) = h(t)
h(t)
t
ULAZ
1
x(t)
x(t)DOBAR ODZIV
t
x(t)
x(t)LO ODZIV
t
-
Linearni sistemi automatskog upravljanja
283
period, dT dominantno vrijeme ili vremenska konstanta
eksponencijalne ovojnice signala na izlazu, )(x novo stacionarno
stanje, )(xx max1 vrijednost prvog preskoka preko novog
stacionarnog stanja i )(xx min2 vrijednost prvog preskoka ispod
novog stacionarnog stanja.
Dijagram sa slike 8.15 je za praksu od posebne vanosti. Da bi se
ovakav dijagram mogao snimiti u praksi to sistem upravljanja mora,
prije svega, biti stabilan i mora imati odreenu rezervu
stabilnosti. Za praksu je bitno da odziv, a time i tipina vremena
odziva budu unutar nekih propisanih ili tehnologijom zahtijevanih
granica. Prije svega, da se oko novog stacionarnog stanja javljaju
oscilacije ije su amplitude priguene po envelopi koja je definisana
dominantnim vremenom dT i konstantnim kvaziperiodom oscilovanja pT
. Broj tih oscilacija je najee jedna do dvije, a jako rijetko smiju
biti tri ili etiri. Brzina reagovanja sistema se priblino
procjenjuje na osnovu vremena smirenja st , a to je vrijeme koje
protekne od trenutka kada je poremeaj djelovao na sistem do
trenutka kada su se kvazioscilacije smirile unutar zone 2 , tj. do
trenutka kada je zadovoljena relacija:
)(x)(x)t(x (8.53)
pri emu je unaprijed zadana mala vrijednost i obino iznosi
05,001,0 = .
Slika 8.15. Kvazioscilatorni odziv sistema i interesantni
parametri
Sam sistem, iji je odziv na odskonu funkciju prikazan na slici
8.15, je sklon ka oscilovanju, pa je potrebno povesti rauna o
rezervama stabilnosti i prvom preskoku iznad novog stacionarnog
stanja. Tako se definie eksponencijalni preskok kao:
[ ] %100)(x)(xx
% max1
= (8.54)
x(t)
t
100%90%
50%
10%
t tk ut s
x( )Tp
x x( )2min_x x( )1max _Td
2
-
8. Ocjena kvaliteta ponaanja SAU i kriteriji za sintezu
284
Doputene vrijednosti za [ ]% se dobiju u odgovarajuim
prirunicima i tablicama. Najee se nalaze u granicama od 10% do 30%,
a vrlo rijetko se mogu kretati i do 70%. Kod aperiodinih odziva je
[ ] %0% = .
Stepen oscilatornosti ili sklonost sistema ka oscilovanju se moe
definisati kao:
[ ] %100)(xx)(xx
%max1
min2
= (8.55)
i poeljno je da ovaj faktor bude to manji. Manji stepen
oscilatornosti kae da je sistem manje sklon oscilovanju, da je
prelazni reim krai i da je vea brzina reagovanja.
Vrijeme kanjenja kt je mogue definisati i na nain kako je to
prikazano na slici 8.16. Sada je kt odreeno kao vrijeme koje
protekne od trenutka dejstva poremeaja, u ovom sluaju odskone
funkcije, pa do trenutka kada pravac povuen u prevojnoj taki
presjeca vremensku osu.
Slika 8.16. Drugi nain odreivanja vremena kanjenja
Primjer 8.1. Veina sistema se u praksi kvalitativno ponaa kao
zatvoreni sistem drugog reda, ija prenosna funkcija u s domenu ima
oblik:
1Ts2sT1)s(W 22 ++
= (8.56)
ili u j domenu:
2nn
2
2n
s2s)j(W
++
= , T/1n = (8.57)
x(t)
t
tk
-
Linearni sistemi automatskog upravljanja
285
gdje je n prirodna uestanost, a koeficijent priguenja inercionog
sistema drugog reda. Sada se mogu nacrtati logaritamske amplitudno
frekventne (AF) i fazno frekventne (FF) karakteristike sistema
(8.56), slika 8.17.
Sa slike 8.17 se vidi da se javlja karakteristini rezonantni vrh
na AF karakteristici, a koji direktno utie na propusni opseg.
Ukoliko je propusni opseg vei, tj. ukoliko je n vee, utoliko je
odziv bri a vrijeme uspona i kanjenja manje. Ukoliko je na AF
karakteristici rezonantni vrh vei, utoliko je vei i prvi preskok, a
time je vee i vrijeme smirivanja. Maksimum na AF karakteristici
odreuje i karakterie rezonantna uestanost rez i ona nije identiki
jednaka n . Dalje je oigledno da kvalitativno povezuje parametre u
frekventnom i vremenskom domenu. Ako na ulaz sistema djeluje
odskona funkcija:
{ } s/1)t(hL)s(U0t,00t,1)t(h)t(u ==
(8.93)
pa se prelazni proces moe smatrati zavrenim kada vrijednost
odziva )t(x opadne na neku unaprijed zadanu vrijednost 0X . Iz
relacije:
0s X)t(x = (8.94)
gdje je unaprijed odreen mali pozitivni broj, obino iznosi do
5%, se odreuje vrijeme smirenja st u zavisnosti od i . Ta zavisnost
je:
1ln1t s = (8.95)
to za granicu smirenja od 1%, koja se esto koristi u praksi, da
je 01,0= , odnosno:
6,4100ln1t s == (8.96)
Ako se unaprijed zada vrijeme za koje treba da se zavri prelazni
proces st , tada se uvijek moe formirati karakteristina jednaina
iji e najblii korjen imaginarnoj osi j zadovoljavati relaciju:
01,0smax t
6,4
=
=
(8.97)
Pojam oscilabilnosti predstavlja sklonost sistema ka
oscilovanju, te ga je potrebno unaprijed poznavati ili odrediti na
osnovu tehnologije procesa. Zbog relativno velikih varijacija
upravljane veliine moe doi do havarije na objektu upravljanja, ak i
kada se radi o stabilnom sistemu upravljanja. Ovo oscilovanje je
posljedica postojanja jednog dominantnog konjugovano kompleksnog
korjena 000 js = . Zato se kao mjera sklonosti sistema ka
oscilovanju uvodi pojam oscilabilnosti , koja predstavlja kolinik
imaginarnog i realnog dijela tog dominantnog konjugovano
kompleksnog korjena:
0
0
= (8.98)
Neka je 0= , sistem nema dominantni konjugovano kompleksni par
korjena, pa se radi o aperiodskom odzivu. Ako je 0 , sistem ima
dominantni konjugovano kompleksni korjen, pa se iz odziva priguenih
oscilacija moe odrediti opadanje amplitude za vrijeme od jednog
kvazi perioda pT , pri emu je 0p /2T pi= . Mogui kvazi oscilatorni
odziv je prikazan na slici 8.26.
-
8. Ocjena kvaliteta ponaanja SAU i kriteriji za sintezu
296
Slika 8.26. Kvazi oscilatorni odziv sistema
U trenutku 1tt = je prva maksimalna vrijednost odziva:
10t011 eX)t(xx == (8.99)
Nakon jednog kvazi perioda pT je trenutak 2tt = :
012
2tt
pi+= (8.100)
u kome je vrijednost odziva neto manja i iznosi:
)/2t(022
010eX)t(xx pi +== (8.101)
Priguenje u toku jednog kvazi perioda se moe definisati kao
relativni pad amplitude:
pi /21
21 e1x
xx
=
= (8.102)
pa se oscilabilnost procesa moe izraziti kao:
)1ln(2
pi
= (8.103)
U praksi se najee zahtijevaju visoke vrijednosti za , pa se za
unaprijed zadanu i/ili dobijenu iz tehnolokih uslova vrijednost
odreuje oscilabilnost 00 / = .
x(t)
tt1 t2
Tp
x =
x(t
)
11 x = x(t )2 2
-
Linearni sistemi automatskog upravljanja
297
Odreena ili zadana vrijednost oscilabilnosti sistema se moe
grafiki predstaviti u kompleksnoj ravni { }s , u kojoj se lociraju
korjeni karakteristine jednaine 0)s(Qn = , slika 8.27a. Sa slike
8.27a se vidi da zahtjev na zadanu vrijednost oscilabilnosti zad
dovodi do znaajnog smanjenja lijeve poluravni kompleksne ravni { }s
, u kojoj mogu biti locirana rjeenja karakteristine jednaine. Ugao
na slici 8.27a se odreuje pomou relacije:
zadarctg = (8.104)
Zahtjevu na zadanu oscilabilnost se dodaje zahtjev zadanog
stepena stabilnosti 0 . To dovodi do novog smanjenja lijeve
poluravni komleksne ravni { }s , u kojoj mogu biti locirana rjeenja
karakteristine jednaine, slika 8.27b.
a) b)
Slika 8.27. Zahtjevi koji se nameu na oscilabilnost (a) i stepen
stabilnosti (b)
Na ovaj nain se dobija poeljna i nepoeljna oblast u kojoj mogu
biti locirana rjeenja karakteristine jednaine sistema 0)s(Qn = ,
slika 8.28. Na ovoj slici pravac AB predstavlja zahtjev za
potrebnim stepenom stabilnosti, dok pravci kroz koordinatni poetak
i C i D predstavljaju zahtjev za potrebnom oscilabilnou
sistema.
Primjer 8.2. Neka se posmatra sistem ija je prenosna
funkcija:
2nn
2
2n
s2sK)s(G
++= (8.105)
ija karakteristina jednaina ima oblik:
0s2s)s(Q 2nn22 =++= (8.106)
s
j
-
8. Ocjena kvaliteta ponaanja SAU i kriteriji za sintezu
298
a koja ima rjeenja:
2nn2,1 1jjs == (8.107)
Slika 8.28. Poeljna i nepoeljna oblast lociranja rjeenja
karakteristine jednaine
Oigledno je n2,1s = , za sve vrijednosti iz segmenta 10 , to se
moe prikazati kao na slici 8.29. Na sve SAU se namee uslov
stabilnosti, tj. rjeenja karakteristine jednaine moraju imati
negativan realni dio 0
-
Linearni sistemi automatskog upravljanja
299
Slika 8.29. Raspored korjena karakteristine jednaine inercionog
sistema drugog reda
a) b)
Slika 8.30. Nametanje uslova da vrijeme smirivanja bude u
dozvoljenim granicama (a) i da odziv ne bude previe lo (b)
gdje je K promjenljivi parametar. Prenosna funkcija sistema
zatvorenog jedininom negativnom povratnom spregom, koji u direktnoj
grani ima blok )s(G , je:
j
= -arc cos( )j
= const
.
C A
D B
0n
n
s
s
1
2jn
s
n
1- 2
1- 2
j
A
B
sC
D
s
j
0
-
8. Ocjena kvaliteta ponaanja SAU i kriteriji za sintezu
300
K)as(sK
)s(G1)s(G)s(W
++=
+= (8.109)
Karakteristina jednaina sada glasi:
0K)as(s =++ (8.110)
a njeni korjeni su:
22
2,1 2aKj
2aK
2a
2a
s
=
= (8.111)
Dijagram promjene vrijednosti parametra K je dat na slici
8.31.
Slika 8.31. Dijagram promjene parametra K i poeljna oblast
poloaja korjena karakteristine jednaine
Vidi se da za sve vrijednosti parametra K trajektorija ostaje u
lijevoj poluravni kompleksne ravni { }s , pa je dati sistem
stabilan bez obzira na promjene parametra K . Meutim, prevelike
vrijednosti parametra K loe utiu na kvalitet prelaznog procesa, to
se zakljuuje na osnovu poeljne oblasti.
Prednost ove metode je u mogunosti odreivanja granica poeljnih
vrijednosti parametra K . Ove trajektorije se nazivaju korjenskim
hodografom, a pravila za njegovo crtanje su uraena u poglavlju
7.
K
s = aK=0
s = 0K=0
2
4K=a
e
2a( ,0)
R s
smIs
-
Linearni sistemi automatskog upravljanja
301
8.6. Indeks stabilnosti sistema
Nekada nije zgodno odreivati rezerve stabilnosti po modulu i po
fazi, nego se koristi indeks stabilnosti koji predstavlja
integralnu rezervu stabilnosti, koja se odreuje iz amplitudno fazne
karakteristike sistema upravljanja u otvorenom. Amplitudno fazna
karakteristika
)j(W sistema upravljanja zatvorenog jedininom negativnom
povranom spregom, kod koga je amplitudno fazna karakteristika
direktna grane )j(G - sistema u otvorenom, je:
)j(G1)j(G)j(W
+= (8.112)
odakle se dobija da je amplitudno frekventna karakteristika
ravna:
)j(G1)j(G)j(W
+= (8.113)
Amplitudno frekventna karakteristika linearnih stabilnih sistema
ima karakteristian tok sa ili bez izrazitog maksimuma maxM , kao to
je prikazano na slici 8.32.
Slika 8.32. Karakteristini izgled amplitudno frekventne
karakteristike linearnih sistema
Maksimum funkcije na slici 8.32 odreuje indeks stabilnosti
sistema. to je maxM vee, sistem je loije priguen i pokazuje veu
sklonost ka oscilovanju. Doputena vrijednost za
maxM zavisi od uslova eksploatacije sistema i u praksi kod dobro
priguenih sistema treba da se nalazi imeu 1,1 i 1,5. U specifinim
sluajevima, kada to dozvoljava tehnologija objekta upravljanja,
prihvatljive su vrijednosti i do 2 ili 2,5.
Analiza priguenja procesa pomou indeksa stabilnosti je pogodna
iz razloga to za njegovo odreivanje nije potrebno crtati i raunati
funkciju )j(W , nego se cijeli postupak izvodi
rez. p
Mm
ax
A
M
= M A =
W( )W(0)
1
-
8. Ocjena kvaliteta ponaanja SAU i kriteriji za sintezu
302
analizom amplitudno fazne karakteristike sistema u otvorenom.
Naime, ordinata take A na slici 8.32 zavisi od modula funkcije )j(W
, tj. )j(W :
)j(G1)j(G)j(W)(MM
+===
pri emu je )(jv)(u)j(G += i predstavlja amplitudno faznu
karakteristiku sistema u otvorenom.
Prenosna funkcija sistema, koji u direktnoj grani ima funkciju
)j(G i koji je zatvoren jedininom negativnom povratnom spregom, se
moe predstaviti u polarnim koordinatama:
)(jv)(u1)(jv)(u
)j(G1)j(G
e)(M)j(W )(j
++
+=
+== (8.114)
Iz relacije (8.114) moe se odrediti:
( ) )(v)(u1)(v)(u
)(jv)(u1)(jv)(u)(M
22
22
++
+=
++
+= (8.115)
Sreivanjem relacije (8.115) se dobija jednaina familije
krunica:
2
22
2
2
2
1)(M)(M)(v
1)(M)(M)(u
=+
+
(8.116)
Relacija (8.116) predstavlja jednaine krunica iji centri lee na
realnoj osi, a koordinate tih centara su ( )122 = )(M/)(M)(u i 0)(v
= . Poluprenik ovih krunica je
( )1)(M/)(Mr 2 = . Varirajui vrijednosti za M, u intervalu od 0
do , moe se nacrtati univerzalna familija M krugova koja ne zavisi
od sistema koji se ispituje. Familija ovih krunica je predstavljena
na slici 8.33. Za 1M = krug se deformie u pravu 2/1u = ili u krug
beskonano velikog poluprenika, dok za 0M = krug se transformie u
taku koja se nalazi u koordinatnom poetku. Za M krug se ponovo
transformie ali u taku
)0j,1( .
Prilikom projektovanja sistema automatskog upravljanja potrebno
je poznavati ili usvojiti maksimalno dozvojenu vrijednost za M, pa
tada amplitudno fazna karakteristika sistema u otvorenom ne smije
sjei krug koji ima tu ili veu vrijednost M. Ovaj uslov treba biti
ispunjen da bi sistem imao bolji indeks stabilnosti od tog
unaprijed zadanog.
-
Linearni sistemi automatskog upravljanja
303
Slika 8.33. Familija M krugova
Identina razmatranja su mogua i preko fazno frekventne
karakteristike sistema, koja se moe odrediti kao:
)j(WRe)j(WIm)j(Wargtg)(tg)(N
=== (8.117)
U cilju odreivanja vrijednosti (8.117) ponovo se polazi od:
=
++
+= )(jv)(u1
)(jv)(u)j(W
( ) ( ) )(v)(u1)(vj
)(v)(u1)(v)(u)(u
2222
22
++
++
++= (8.118)
Iz jednaine (8.118) se dobija:
)(v)(u)(u)(v)(N
22 ++
= (8.119)
Sreivanjem relacije (8.119) se dobija jednaina familije
krunica:
)(N41)(N
)(N21)(v
21)(u
2
222
+=
+
+ (8.120)
jv
u
M>1 M
-
8. Ocjena kvaliteta ponaanja SAU i kriteriji za sintezu
304
Relacija (8.120) predstavlja jednaine krunica iji centri lee u
takama 2/1)(u = i )(N2/1)(v = , a iji su poluprenici 2/)(N/11r 2 +=
. Familija ovih krunica
moe se predstaviti kao na slici 8.34. Na ovaj dijagram se moe
ucrtati amplitudno fazna karakteristika otvorenog sistema sa
potrebnim ili nametnutim uslovima za fazno frekventnu
karakteristiku.
Slika 8.34. Familija N krugova
8.7. Uraeni primjeri
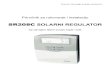
Primjer 10. Analizirati regulacioni krug na slici u smislu
praenja odskone promjene zadane vrijednosti u(t), odnosno
eliminisanja utjecaja smetnji f1(t), f2(t) i f3(t) koje su takoe
odskonog karaktera.
Slika p-1. Regulaciona kontura: regulator, objekat upravljanja,
signali zadane vrijednosti i karakteristinih smetnji
jv
u
G (j )
AF karakteristika sistema
( 1, j0)
-
Linearni sistemi automatskog upravljanja
305
Primjenom algebre blokova, ili koristei princip superpozicije,
lahko moemo dobiti slijedeu relaciju:
)s(F)s(G)s(G)s(F)s(G)s(G)s(G
)s(F)s(G)s(G)s(G)s(G)s(U)s(G)s(G
)s(G)s(G)s(X
RR
R
R
R
R
32
1
11
1
11
++
++
++
++
=
(p-1)
Regulaciona greka se dobije kao:
)s(F)s(G)s(G)s(F)s(G)s(G)s(G
)s(F)s(G)s(G)s(G)s(G)s(U)s(G)s(G)s(X)s(U)s(E
RR
R
R
R
32
1
11
1
111
+
+
+
+==
(p-2)
Primjenom inverzne Laplace-ove transformacije, teoreme o konanoj
vrijednosti, i stavljajui:
s
d)s(F,s
c)s(F,s
b)s(F,s
a)s(U ==== 321 , gdje su a, b, c i d proizvoljne realne
konstante, dobijemo:
++++
++++
+++
++++
+++
++++
=
==
s
d
)ss)(s(s,
slims
c
)ss)(s(s,
)ss)(s(s
lim
s
b
)ss)(s(s,
)ss)(s(s,
s
lims
a
)ss)(s(s,
slim
)s(sElim)t(elim
ss
ss
st
221101
221101
2211
221101
22110
221101
20
2
2
0
2
2
02
0
0
(p-3)
Rjeavajui dobijene limese, imamo: 000 =
b)t(elim
t (p-4)
Iz posljednje jednaine se lahko vidi da data regulaciona kontura
omoguuje praenje skokovite promjene zadane vrijednosti u(t) bez
statike greke, te eliminisanje smetnji f2(t) i f3(t), dok smetnju
f1(t) nije mogue otkloniti. Ovo je i oekivano, s obzirom da se
smetnja f1(t) moe protumaiti kao "obmanjivanje" regulatora jer isti
ne prima tanu informaciju o regulacionom odstupanju e(t).
Rezultate provedene analize moemo potkrijepiti adekvatnom
simulacijom datog sistema. Na slici p-2 je prikazano ponaanje
sistema, za konkretne profile zadane vrijednosti i smetnji.
-
8. Ocjena kvaliteta ponaanja SAU i kriteriji za sintezu
306
0 200 400 600 800 1000 1200 1400 1600 1800 2000-0.5
00.5
11.5
u(t)
0 200 400 600 800 1000 1200 1400 1600 1800 2000-0.2
0
0.2
0.4
f1(t)
0 200 400 600 800 1000 1200 1400 1600 1800 2000-0.4-0.2
00.2
f2(t)
0 200 400 600 800 1000 1200 1400 1600 1800 2000-0.4-0.2
00.2
f3(t)
0 200 400 600 800 1000 1200 1400 1600 1800 20000
0.5
1
t
x(t)
Slika p-2. Profili ulaza i smetnji na sistem i odziv sistema
Primjer 2. Za sistem automatskog upravljanja, dat na slici,
pronai vrijednost parametra T,
koja minimizira kriterijalni funkcional
=
0
22 dt)t(eI , gdje je e(t)= u(t)-x(t), a u(t)=1(t).
-
Linearni sistemi automatskog upravljanja
307
Slika p-3. Regulaciona kontura sa PD lanom u povratnoj grani
Prenosna funkcija cjelokupnog sistema je:
( ) ( )( )
Ks)KT(sK
ss
)Ts(Kss
K
sGz+++
=
+
++
+=
1111
12 (p-5)
Uvedemo li smjene nn KT,K 212 =+= (p-6) dobijamo tipini prikaz
sistema drugog reda ije je pojaanje jednako 1. Oito je da, za
fiksno K (osobina objekta), promjenom parametra T (parametar
kompenzatora) utiemo samo na koeficijent priguenja , te se problem
svodi na nalaenje optimalne vrijednosti , za fiksno n.
( ) 222
2 nnn
zss
sG
++= (p-7)
Ukoliko je ( )10, , tada je odziv na jedininu odskonu funkciju
sistema ija je prenosna funkcija data sa (p-7) dat sa (kasnije e
biti pokazano da optimalna vrijednost stvarno lei u intervalu (0,
1)):
( )
arccos),t(tsine)t(x n
tn=
+
=
122
11
1 (p-8)
Koristei injenicu da za 0t vrijedi e(t) = 1-x(t), dobije se:
2
212
11
1
2
2
22
22
2
+
=
+
=
tcos
etsine)t(e
nt
n
t nn (p-9)
Ukoliko komplexna funkcija F(s) predstavlja Laplace-ovu
transformaciju veliine date sa (p-9), lahko se moe dobiti:
-
8. Ocjena kvaliteta ponaanja SAU i kriteriji za sintezu
308
( )242
0
22 1
4314
10
+===
n
dt)t(e)(FI (p-10)
Posmatrajui desnu stranu (p-10) kao funkciju od , upotrebom
diferencijalnog rauna moemo utvrditi da je = 0,5 vrijednost koja
minimizira I2.
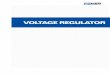
U cilju verifikacije analize uz pomo simulacionih rezultata,
posmatrajmo funkciju gornje granice za razne vrijednosti parametra
:
( ) =t
d)(etI0
22 (p-11)
Za potrebe simulacije je, bez umanjenja optosti (vidi (p-10))
uzeto da je n = 1. Na slici p-4 je prikazano ponaanje funkcije (
)tI2 za nekoliko vrijednosti .
-
Linearni sistemi automatskog upravljanja
309
Slika p-4. Ponaanje kriterijalnog funkcionala, kao funkcije
gronje granice, za razne vrijednosti koeficijenta priguenja
-
8. Ocjena kvaliteta ponaanja SAU i kriteriji za sintezu
310