Embed Size (px)
Citation preview
1
Relazione finale del Seminario “Laboratorio di
Azionamenti Elettrici”
DOCENTE: STUDENTI:
Ing. Alessandro SERPI Claudia MUSIO
Maura MUSIO
Gianmarco CASULA
Alessio DEIANA
Simone FENU
Stefano MANCA
Lucio LOI
2
LEZIONE DEL 4 GIUGNO 2014 – SENSORI DI POSIZIONE
Premessa
Durante la prima lezione nel Laboratorio di Azionamenti Elettrici è stata fatta una
panoramica su alcuni sensori di posizione, applicabili alle macchine a magneti permanenti. Si
è rivolta particolare attenzione a tre tipi su cui sono state svolte le prove in laboratorio. Ci si
riferisce a:
- Sensori ad effetto Hall
- Resolver
- Encoder
Con l’utilizzo di tali sensori si vuole effettuare un controllo di posizione e velocità di un
motore. Una alternativa più economica e con una risposta più rapida è sicuramente l’utilizzo
di tecniche a ciclo aperto e sensorless; un esempio è dato dal motore passo-passo, nel quale la
posizione è assodata dal segnale dato al motore. Per il controllo sensorless si sviluppano una
serie di algoritmi che ricostruiscono le variabili velocità e spostamento in funzione di errori
di altre grandezze. Tuttavia se si desidera un controllo con feedback si ha necessità di un
sensore di posizione.
Sensori ad effetto Hall
Tali sensori funzionano con lo stesso principio dei sensori di corrente ma, poiché in tale sede
non è rilevante l’intensità di tensione indotta ma solo la polarità, si utilizzano dei sensori low-
cost.
Il sensore, costituito da una lamina alimentata a tensione generalmente costante, verrà
attraversato da una certa corrente I: quando investito da un campo magnetico B sarà sede di
interazione tra cariche elettriche in movimento e campo magnetico. Si genererà uno
spostamento e dunque una tensione indotta in direzione ortogonale al piano di B e I.
Sfruttando questa tensione indotta si riescono a carpire una serie di in formazioni, ma ai fini
dell’esercitazione, è sufficiente conoscere se la lamina, o in generale il sensore, è “affacciato”
ad un polo nord o sud.
3
La tensione indotta nei sensori viene misurata e processata dalla digital circuitry (interna al
sensore), che da un segnale analogico produrrà un segnale digitale.
Nel motore in esame sono presenti 3 sensori a 60 gradi uno rispetto all’altro. Tale
configurazione permette di avere una risoluzione di 1/6 di giro; in termini binari si ottengono
3 bit, con i quali è possibile rappresentare 8 combinazioni, ma 000 111 non sono ammissibili
poiché i sensori non possono stare contemporaneamente sotto uno stesso polo. Chiaramente
dal punto di vista della risoluzione siamo in presenza di un risultato scadente.
Viene analizzata ora la prova effettuata.
Preliminarmente è necessario alimentare i sensori, prelevare i segnali e, mandando in
rotazione il motore, verificare che funzionino come previsto. Per la prova sono stati
alimentati separatamente dal circuito di potenza.
Dopodiché dal datasheet si è appreso quali sono le uscite per realizzare il corretto
collegamento. Si è fornita una alimentazione a 5 V, con rosso (positivo) e nero (negativo), e
sono stati prelevati i segnali dai tre cavi.
E’ stato possibile notare da subito che con motore fermo i tre segnali risultano costanti.
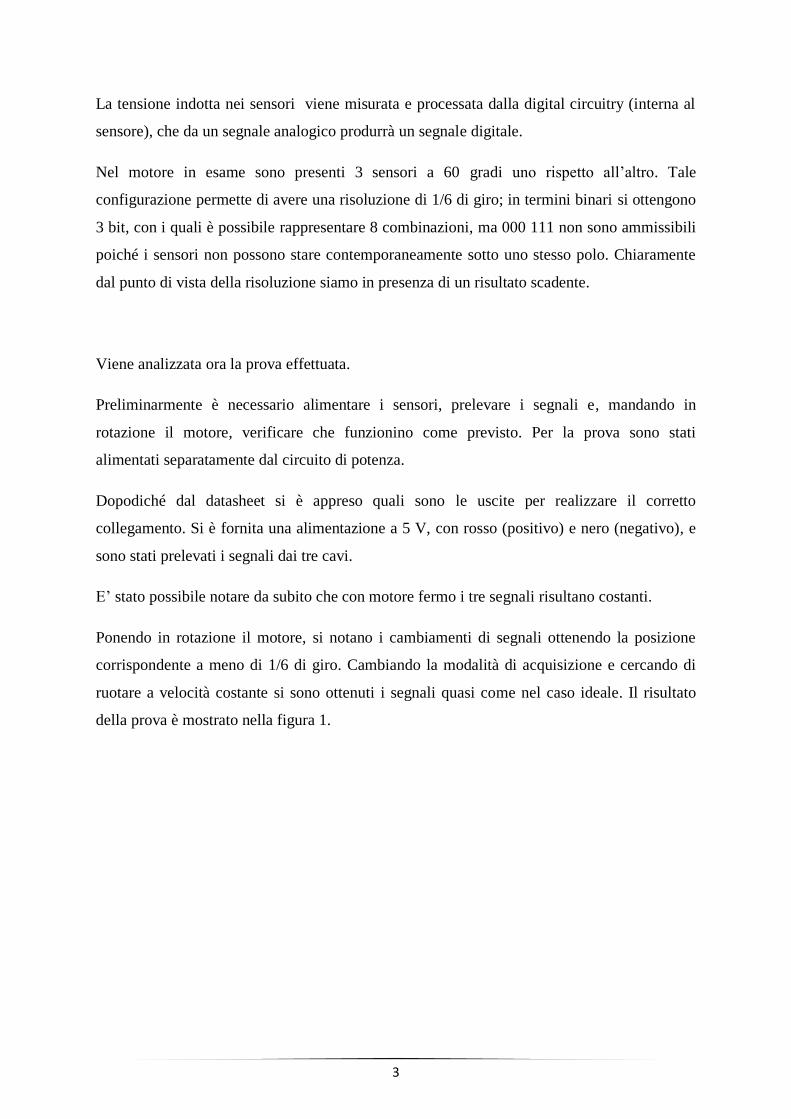
Ponendo in rotazione il motore, si notano i cambiamenti di segnali ottenendo la posizione
corrispondente a meno di 1/6 di giro. Cambiando la modalità di acquisizione e cercando di
ruotare a velocità costante si sono ottenuti i segnali quasi come nel caso ideale. Il risultato
della prova è mostrato nella figura 1.
4
Fig. 1. Evoluzione dei segnali delle tre sonde ad effetto Hall al variare della posizione del rotore.
Il vantaggio dato dai sensori Hall è che il segnale è già digitale a differenza degli altri sensori;
i tempi di acquisizione sono ridotti a zero e questo agevola poiché non bisogna effettuare una
interrogazione del sensore ma si ottengono tre segnali contemporaneamente.
5
Resolver
Con la seconda tipologia di sensori di posizione il segnale è molto più accurato rispetto al
primo; da ciò deriva la maggior diffusione del suo utilizzo.
Il resolver permette di risalire alla posizione assoluta del motore e inoltre in maniera molto
più accurata. Per quanto riguarda il funzionamento, si hanno tre avvolgimenti: 1 primario e 2
secondari.
Il primario è alimentato in corrente sinusoidale ad una certa frequenza tipicamente dell’ordine
dei KHz. È presente un avvolgimento intermedio di rotore tramite il quale, con il principio
del trasformatore rotante, viene trasferita la tensione sul secondario rotante; se il sistema è
fermo si ha un certo accoppiamento fra avvolgimento di rotore e i secondari in quadratura fra
loro. Si avranno due tensioni indotte, proporzionali, oltre che alla tensione di alimentazione,
al coseno e seno dell’angolo ϑ. Quindi per ϑ=0 si ha accoppiamento perfetto fra avvolgimento
di rotore e uno dei secondari (forniranno dunque la stessa tensione), mentre con l’altro
avvolgimento secondario non si ha l’accoppiamento. Viceversa, per ϑ = 90° la situazione si
inverte.
I due segnali V1 e V2, a meno di fattori costruttivi del resolver ( alfa, K1, K2 ), sono
proporzionali a sen(ϑ) e cos(ϑ) . Significa che i segnali sono modulati in ampiezza. Con il
motore fermo (ϑ = costante) si hanno ai capi dei morsetti due segnali che oscillano.
Viene analizzata la prova effettuata.
Il motore utilizzato è a magneti permanenti da 600 W, con Resolver montati sulla parte
posteriore.
Per ottenere il segnale è stato utilizzato un connettore costruito come da datasheet.
Collegando i riferimenti alto e basso per i tre avvolgimenti all’oscilloscopio e dopo aver
settato correttamente lo strumento, sono stati studiati i tre casi rappresentati nelle seguenti
figure.
6
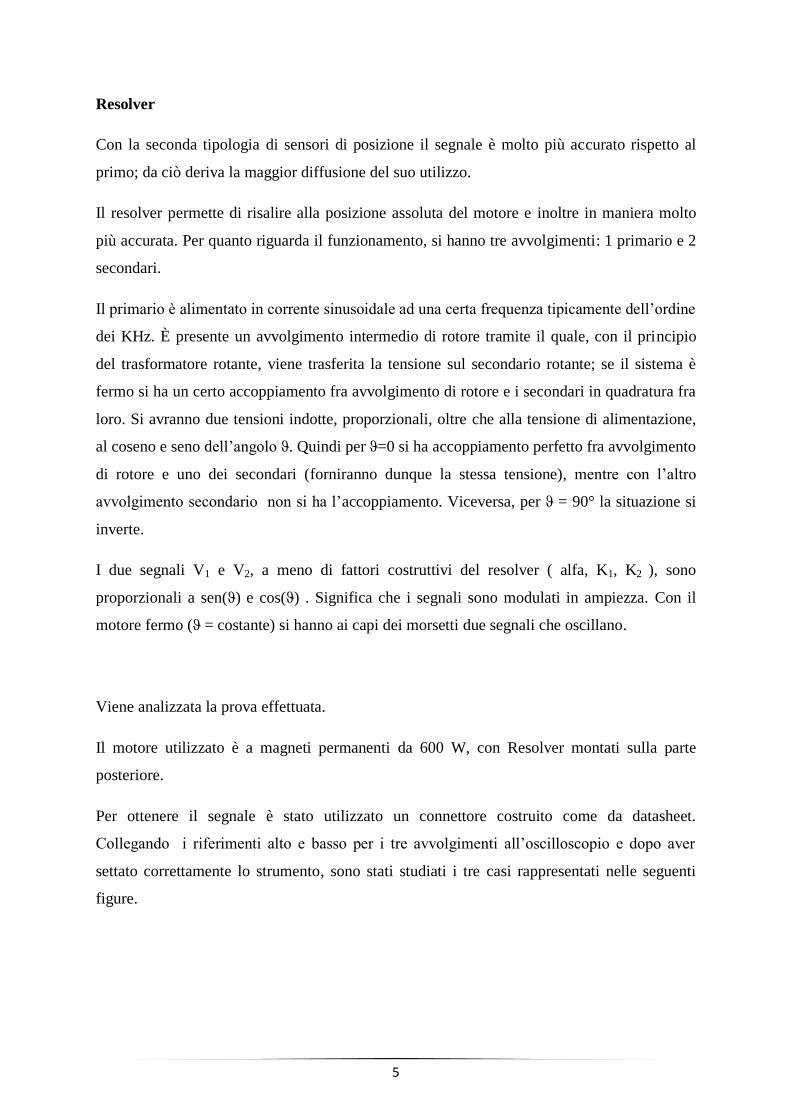
In figura 2, si ha l’ingresso (in blu), l’uscita coseno nulla (in giallo), uscita seno unitaria (in
verde). Un’analisi di seno e coseno evidenzia che il motore si trova a 90° o 270°, ma il
confronto del seno con l’ingresso, mostra che si trova in opposizione di fase, e dunque a
270°.
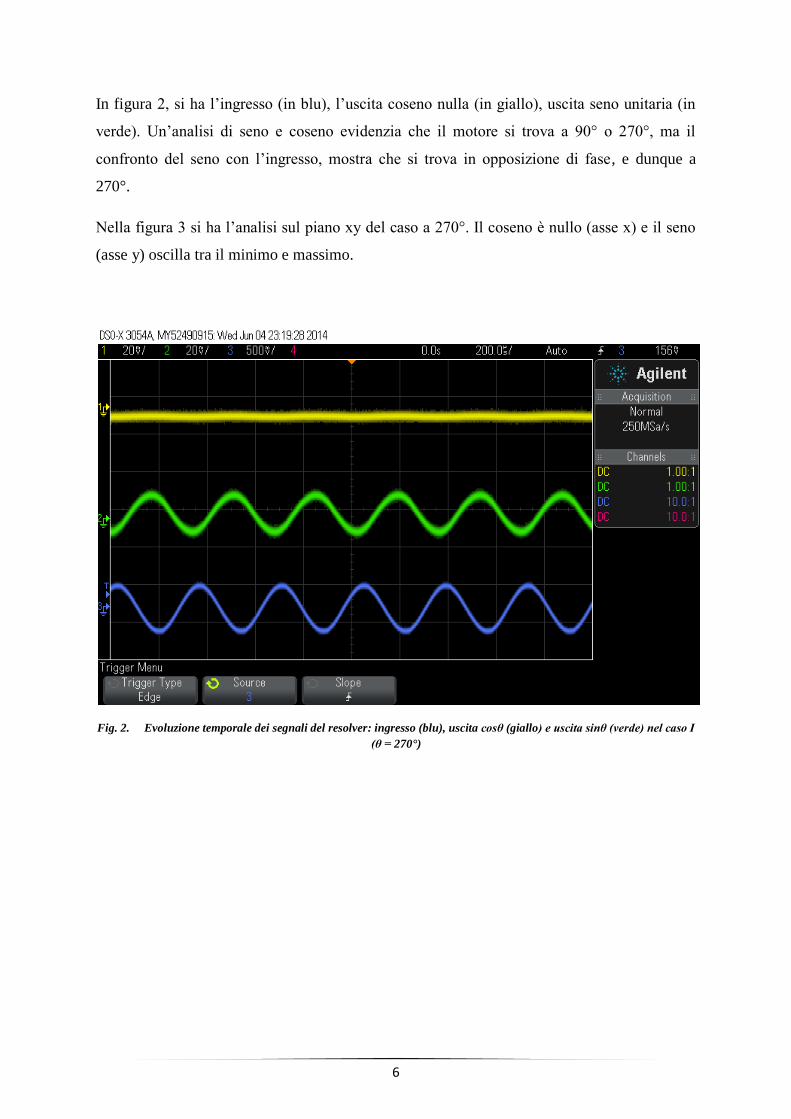
Nella figura 3 si ha l’analisi sul piano xy del caso a 270°. Il coseno è nullo (asse x) e il seno
(asse y) oscilla tra il minimo e massimo.
Fig. 2. Evoluzione temporale dei segnali del resolver: ingresso (blu), uscita cosθ (giallo) e uscita sinθ (verde) nel caso I
(θ = 270°)
7
Fig. 3. Evoluzione sul piano (cosθ, sinθ) dei segnali in uscita dal resolver nel caso I (θ = 270°)
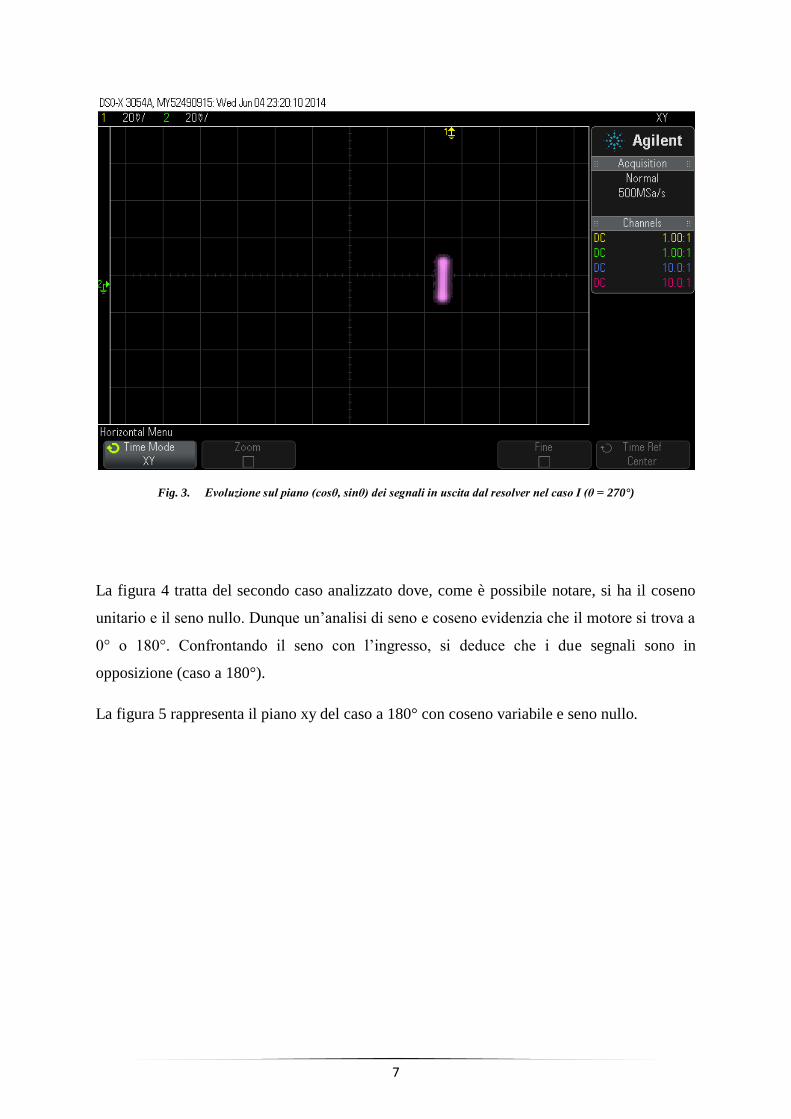
La figura 4 tratta del secondo caso analizzato dove, come è possibile notare, si ha il coseno
unitario e il seno nullo. Dunque un’analisi di seno e coseno evidenzia che il motore si trova a
0° o 180°. Confrontando il seno con l’ingresso, si deduce che i due segnali sono in
opposizione (caso a 180°).
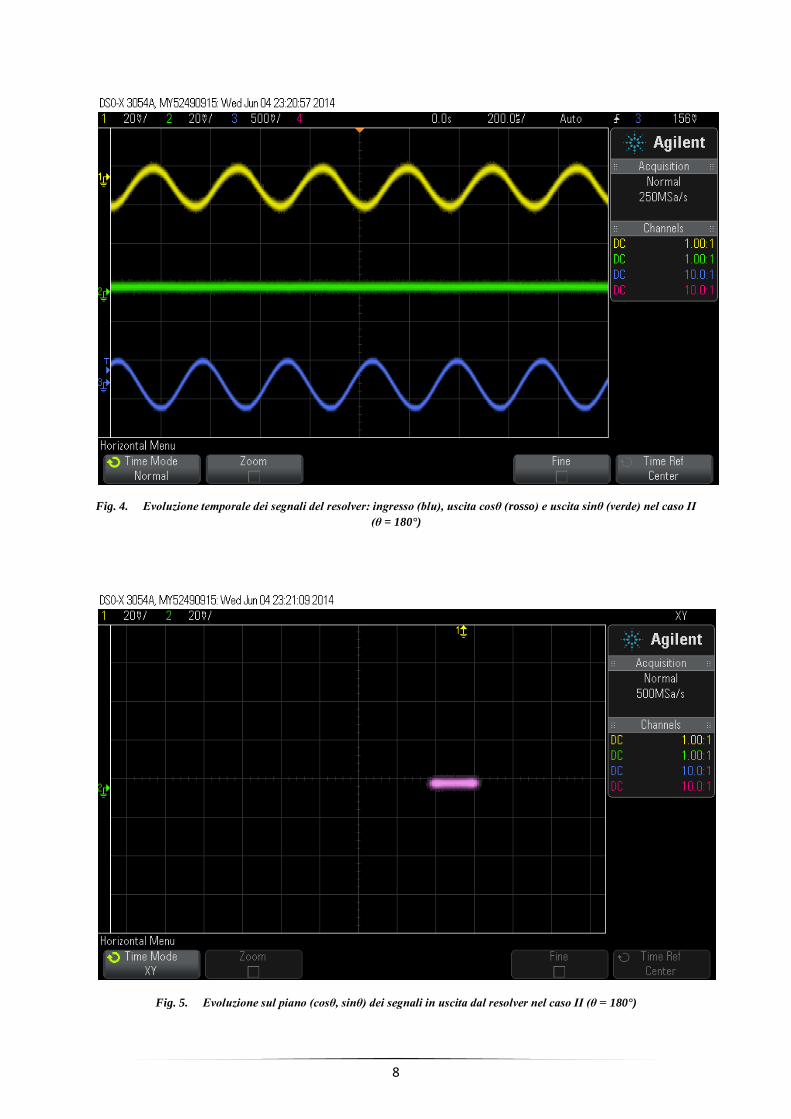
La figura 5 rappresenta il piano xy del caso a 180° con coseno variabile e seno nullo.
8
Fig. 4. Evoluzione temporale dei segnali del resolver: ingresso (blu), uscita cosθ (rosso) e uscita sinθ (verde) nel caso II
(θ = 180°)
Fig. 5. Evoluzione sul piano (cosθ, sinθ) dei segnali in uscita dal resolver nel caso II (θ = 180°)
9
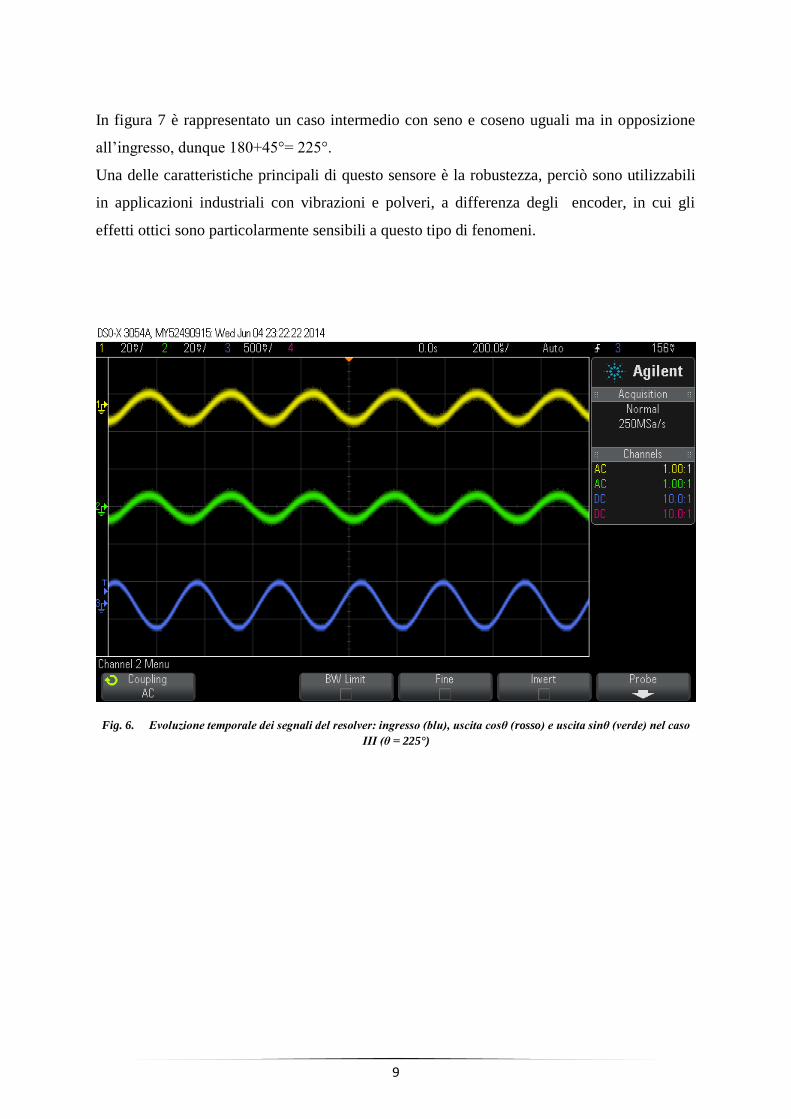
In figura 7 è rappresentato un caso intermedio con seno e coseno uguali ma in opposizione
all’ingresso, dunque 180+45°= 225°.
Una delle caratteristiche principali di questo sensore è la robustezza, perciò sono utilizzabili
in applicazioni industriali con vibrazioni e polveri, a differenza degli encoder, in cui gli
effetti ottici sono particolarmente sensibili a questo tipo di fenomeni.
Fig. 6. Evoluzione temporale dei segnali del resolver: ingresso (blu), uscita cosθ (rosso) e uscita sinθ (verde) nel caso
III (θ = 225°)
10
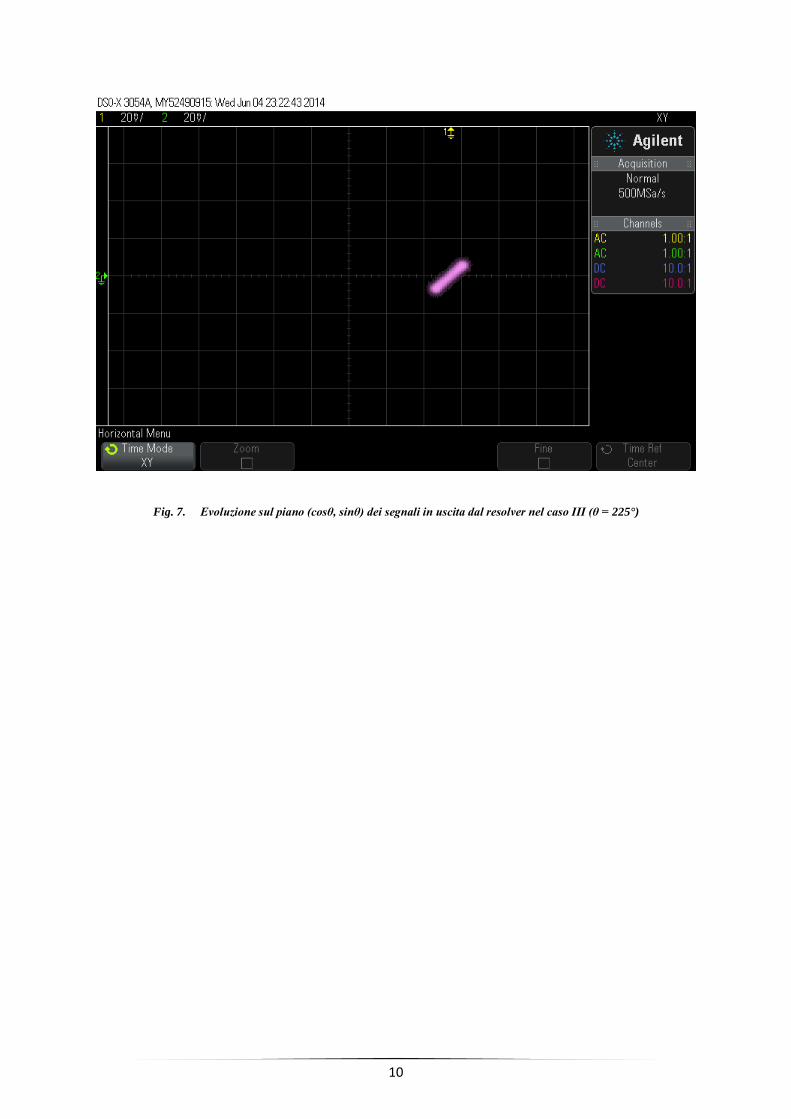
Fig. 7. Evoluzione sul piano (cosθ, sinθ) dei segnali in uscita dal resolver nel caso III (θ = 225°)
11
Encoder
Sono stati analizzati principalmente gli encoder ottici, di tipo incrementale e assoluto.
Gli Encoder incrementali forniscono informazioni su come varia la posizione del motore
piuttosto che la sua posizione assoluta. Sono composti di un disco forato codificato con una
traccia incrementale e una di riferimento. Sono generati due segnali luminosi da emettitori
ottici A e B, i quali vengono ricevuti dai ricevitori se passano attraverso il disco.
Le coppie A e B sono poste in sfasamento per discriminare il verso di rotazione del motore.
Contando il numero di impulsi si risale all’angolo spaziato. Se non si conosce la posizione
iniziale, non si può determinare la posizione assoluta. A questo proposito è stata introdotta la
traccia di riferimento citata. Essa fornisce un impulso a giro che si può utilizzare per resettare
l’encoder, ovvero per comunicargli la posizione assumibile come zero.
È il sistema più semplice ed economico tra gli encoder.
Gli Encoder assoluti possiedono un numero maggiore di tracce rispetto ai precedenti e
vengono codificate in modo da leggere segnali alti o bassi, interpretabili come bit. Maggiore
è il numero delle coppie e maggiore sarà la risoluzione. La realizzazione è più complicata e si
ha un limite di tracce da mettere, sia per limite radiale sia circonferenziale (è necessaria una
minima distanza fra due fori e coppie successive).
Si può avere una codifica binaria o in codice Gray. Quest’ultima si basa sulla variazione, tra
due posizioni successive, di un solo bit. In tale maniera una lettura errata, o un salto, sarà
immediatamente riconosciuta da una variazione di due bit e dunque scartato dal sistema di
acquisizione.
L’encoder analizzato nel laboratorio è un ECN 1123 della HEIDENHAIN. Nel datasheet
della casa madre si possono leggere tutta serie di dati tra cui: frequenza, calculation time,
current, Velocità max (12000 RPM), temperature di funzionamento, risoluzione (23 bit, ogni
giro è suddiviso in 8 milioni di parti), momento d’inerzia ecc..
Il cavetto in dotazione presenta diversi segnali: una coppia di alimentazione; un’altra coppia
per il segnale di clock; il canale dati bidirezionale, il quale permette di trasmettere le
12
interrogazioni allo strumento, di ricevere i dati in seriale e avviare la chiusura della chiamata.
Il protocollo per tali procedure è ENDAT 2.2.
Uno dei limiti dello strumento è la frequenza di clock che dovrà essere fissata tenendo conto
degli effetti di propagazione, per cui anche la lunghezza del cavo va presa in considerazione.
Durante la comunicazione si avrà il segnale che si accumula per un certo tempo prima che
venga ritrasmesso, per cui si deve tener conto di questo tempo di latenza. A maggior ragione
se il ritardo di propagazione è dello stesso ordine di grandezza del periodo di
campionamento. Si deve dunque sapere quando leggere l’informazione ricercata.
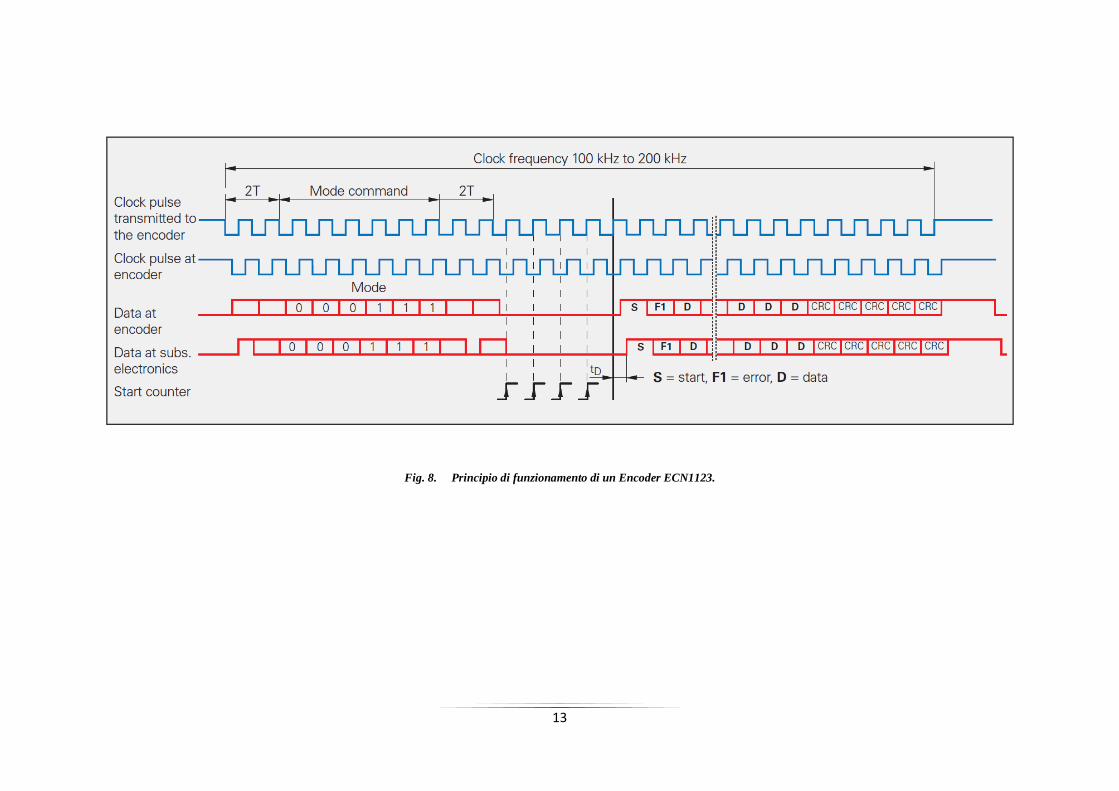
All’avvio la procedura invia una riga che richiede il dato. Dopo un tempo di attesa, sul canale
dati appare il segnale alto e inizia la trasmissione: in particolare si ha un segnale di guasto
seguito dai dati e dopo la conclusione (vedi figura 8). Seguirà la procedura di messa in
standby in modo che, in seguito, l’encoder sia pronto per la nuova interrogazione.
Il dato è trasmesso bit per bit. Se si volesse una trasmissione più rapida, in teoria si potrebbe
rinunciare ad un paio di bit in base alla precisione richiesta, in modo da poter utilizzare il
segnale mentre l’encoder sta ancora trasmettendo in parallelo. Tuttavia questo non si può fare
perché il primo bit è il meno significativo. L’alternativa è aumentare la frequenza di clock
entro i limiti.
Si ottiene l’informazione ogni Ts e dunque ogni 102.4 [μs].
Sono necessarie compensazioni per il cavo, altrimenti si verifica un crollo della frequenza che
raddoppierebbe il tempo necessario per avere l’informazione.
13
Fig. 8. Principio di funzionamento di un Encoder ECN1123.
14
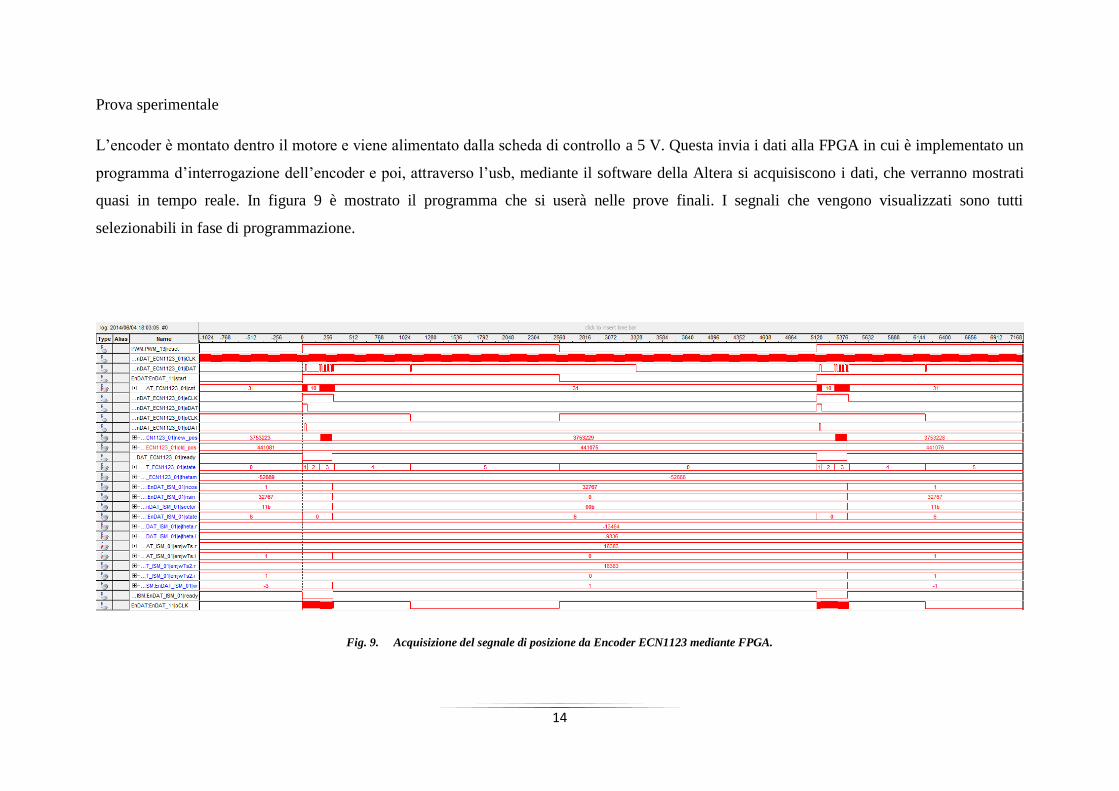
Prova sperimentale
L’encoder è montato dentro il motore e viene alimentato dalla scheda di controllo a 5 V. Questa invia i dati alla FPGA in cui è implementato un
programma d’interrogazione dell’encoder e poi, attraverso l’usb, mediante il software della Altera si acquisiscono i dati, che verranno mostrati
quasi in tempo reale. In figura 9 è mostrato il programma che si userà nelle prove finali. I segnali che vengono visualizzati sono tutti
selezionabili in fase di programmazione.
Fig. 9. Acquisizione del segnale di posizione da Encoder ECN1123 mediante FPGA.
15
LEZIONE DEL 30 MAGGIO 2014 – SENSORI DI CORRENTE
Resistenza di Shunt
Per misurare la corrente i che circola su un conduttore si inserisce in serie una resistenza di
valore noto, detta “shunt resistance”, indicata con Rs. Ai capi di Rs si misura la caduta di
potenziale, dalla quale si risale al valore di corrente tramite la legge di Ohm.
In realtà si deve tener conto di fenomeni di non idealità, come resistenze e induttanze
parassite, derivanti da uno scorretto collegamento della stessa Rs, e come le variazioni dai
valori nominali dovute alla deriva termica. Si indicano questi elementi con rs e Ls.
In prima approssimazione si possono considerare valori molto piccoli sia per rs che per Ls, e
applicare la legge nel caso ideale. In particolare, Ls può essere certamente trascurato quando
le correnti da misurare sono prevalentemente costanti, e il suo valore inciderà solo sul
transitorio. Andrà invece correttamente valutato nel caso di correnti fortemente variabili,
poiché comporterà un ritardo che va a inficiare la misura.
Si possono considerare due classi di shunt resistance. Si hanno quelle ad alte prestazioni, di
tipo coassiale, che sono idonee per misurare correnti impulsive (con valori di picco molto
elevati per breve durata). Nel loro caso il sensore deve rispondere in tempi molto rapidi,
dunque è necessario che abbia piccoli valori per Ls, oltre che per rs . Devono inoltre resistere
a correnti di diversi kA. In questa classe troviamo sensori ingombranti e costosi, che
certamente non vengono utilizzati per la misura delle correnti di un motore in laboratorio. Si
utilizzano, invece, l’altra classe dei lowcost, il “Surface Mounted Device” (o SMD), i quali
sono più economici e adatti a essere integrati all’interno di una scheda di controllo
elettronica. Le SMD sono strutture a film sottile, comunque capaci di resistere a correnti
elevate ma non troppo (correnti maggiori comporterebbero perdite di diversi Watt, tollerabili
in laboratorio ma non in ambito commerciale, dove il sensore può essere usato per ottenere
un controllo di corrente di tipo feedback). Altra cosa importante è che il segnale è costruito
16
tramite una procedura integrale, quindi non si è interessati a una misura istantanea della
corrente, ma piuttosto a una misura del valor medio in un certo intervallo (μs).
Uno degli svantaggi principali di una resistenza di shunt è che non garantisce l’isolamento
galvanico tra il circuito su cui circola la corrente da misurare e lo strumento di misura, e
dunque servirà un ulteriore elemento per ottenere l’isolamento fra la parte di potenza e quella
di segnale. I materiali utilizzati sono leghe Ni-Cr, Mn-Cu e altre leghe che garantiscono una
bassa deriva termica (low thermal drift), solitamente minore di 20 [ppm/K], e dunque hanno
valori di resistenza molto stabili.
Per completare il discorso sulla resistenza di shunt, si introduce anche la trace resistance,
basata sullo stesso principio di funzionamento: è una tecnologia ancora immatura, che
permette di evitare il problema delle resistenze parassite dovute al collegamento della
resistenza di shunt. Al posto di una resistenza esterna si utilizza una resistenza intrinseca a un
componente in conduzione del circuito. In tal modo non si aggiungono perdite al sistema e si
risparmiano i costi di elementi aggiuntivi. Il problema è che le resistenze interne al circuito
difficilmente avranno valori di resistenza elevati, e perciò, con correnti moderate, in uscita si
avranno piccole tensioni (mV), la cui misura potrebbe essere problematica, soprattutto in
presenza di rumore di fondo non trascurabile: è un problema di sensibilità della misura. Un
secondo problema è dato dal fatto che non si possono scegliere le caratteristiche costruttive
della trace resistance, e quindi sicuramente presenteranno una deriva termica peggiore delle
resistenze di shunt.
Modulazione sigma-delta
Si sposta l’attenzione verso gli elementi della catena di controllo immediatamente a valle, che
si occupano di convertire il segnale analogico in digitale, per poter essere elaborato dalla
scheda di controllo. La necessità di analizzare questi elementi nasce dalla mancanza di un
filtro digitale già montato sulla scheda di controllo (per contenere i costi): si dovrà perciò
comprendere che tipo di segnale ci sarà in uscita dal convertitore, e che andrà in ingresso ad
un filtro digitale implementato. In particolare si utilizza un modulatore sigma-delta. È
costituito da due componenti: HCPL7860, che ha lo scopo di generare in uscita due segnali
(un clock e un segnale di dati), e poi un filtro di decimazione che acquisisce questi segnali e li
integra opportunamente per ricostruire il segnale di corrente. Il primo problema è

17
comprendere che tipo di segnali e arrivano dalla sonda: inizialmente possono
sembrare dei segnali provenienti da una modulazione PWM, in realtà non è così. Infatti, nella
PWM, una volta scelto il tempo di campionamento, realizziamo il valore di tensione previsto
tramite un impulso (centrato o non centrato) con larghezza proporzionale al rapporto tra la
tensione desiderata e la tensione massima del bus. Quindi nella PWM abbiamo la certezza del
periodo e facciamo variare la larghezza dell’impulso, in modo tale che in quell’intervallo
risulti applicata una tensione media proprio del valore voluto. Invece il segnale che
arriva non fornisce il periodo della modulazione, ma un segnale a 10 MHz. Non si conosce
dunque il periodo su cui si andrà a ricostruire il valore di tensione. La domanda che sorge
spontanea è: come si ricostruisce un valore medio del segnale se il periodo su cui calcolare la
media non è noto?
Si consideri in ingresso un segnale x(t) che oscilla tra 0 e un valore massimo, pari a 1 per
semplicità. Tale segnale viene trasformato in un segnale digitale (yk), che può assumere solo
due valori, ovvero proprio 0 e 1.
Si parte dalla seguente condizione iniziale:
Il dato digitale viene convertito in analogico e viene comparato con il segnale in ingresso:
Questo segnale di errore viene integrato: partendo da una condizione , il segnale in uscita
dall’integratore, , inizierà a crescere seguendo una rampa lineare. L’uscita rimane a
fino a che non raggiunge la soglia , per cui si verifica la commutazione di . Ora
dunque vale : quando viene confrontata nuovamente con l’ingresso otteniamo:
18
Quindi l’integratore somma questo valore al valore precedente e la sua uscita decresce, sino a
raggiungere la soglia , che fa commutare l’uscita in modo che ritorni a . Idealmente
è dunque una serie di rampe crescenti e decrescenti alternate. Il tempo di salita e il
tempo di discesa coincidono nel caso il valore in ingresso si trovi a centro scala. La loro
somma da sempre il periodo del segnale.
Ipotizzando che il segnale si trovi molto vicino al valore 1. Inizialmente, quando
, l’errore è molto grande, e dunque raggiunge molto rapidamente la soglia 1. Allora
l’uscita commuta ( ) e l’errore diventa negativo, ma molto piccolo in modulo, e
dunque decresce, ma molto lentamente. Come risultato si avrà un piccolo intervallo in
cui , e un grande intervallo in cui : è ragionevole che sia così, considerando
che il segnale in ingresso era prossimo a . Quanto è grande l’intervallo in cui ?
Teoricamente, se l’ingresso fosse , tale intervallo sarebbe infinito, e ciò è
inaccettabile ai fini pratici. Si provi a calcolare il periodo. Scrivendo l’espressione di , e
imponendo che questo, a partire da diventi , si ricava il tempo , ovvero il tempo in cui
. Analogamente, per , si ricava , intervallo in cui . La somma è
pari al periodo. Dall’espressione analitica di si nota un problema: oltre a
dipendere dal guadagno dell’integratore, dipende anche dal valore del segnale . Si
considerino i duty cycles,
Ovvero, i duty cycles coincidono con il valore in ‘per unit’ del segnale. Ancora non si
conosce per quanto tempo di deve osservare il segnale. Se si avesse questa informazione, si
potrebbe contare la densità di e la densità di , e quindi risalire ai duty cycle prima, e poi al
valore del segnale. Non conoscendo l’informazione sul tempo di osservazione, si procede
considerando la seguente parabola:
19
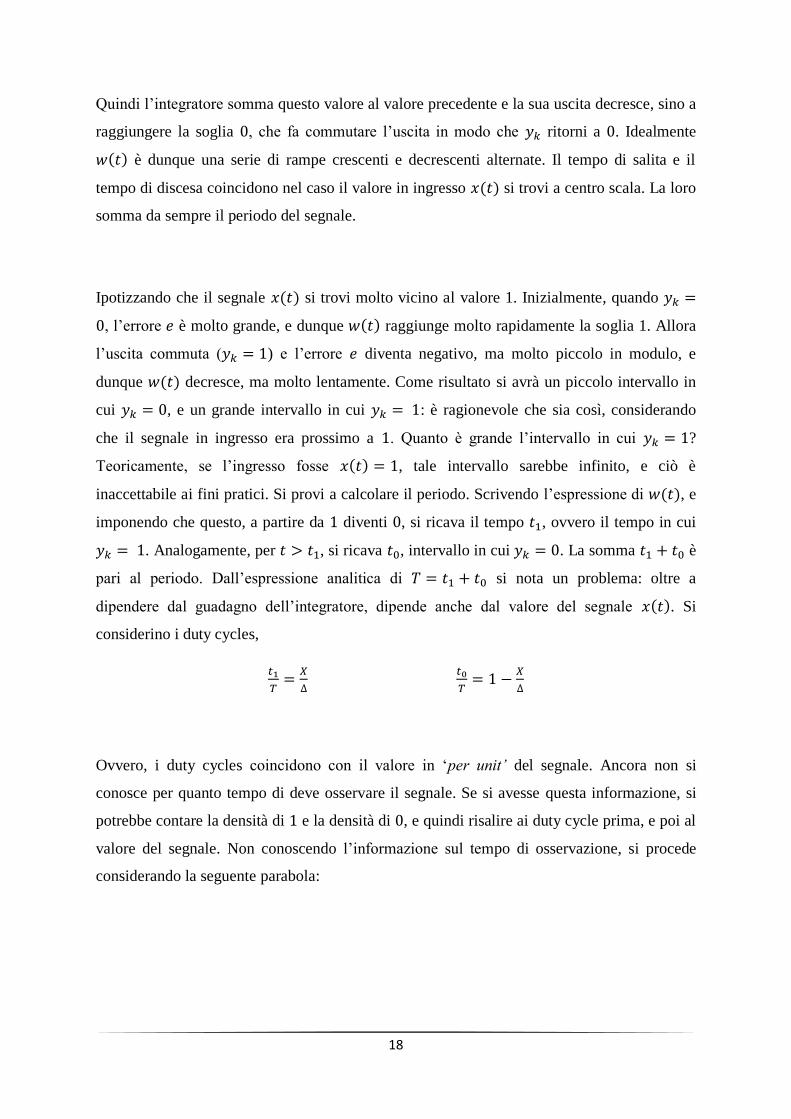
Questa curva mostra come
varia il tempo in funzione
del segnale: il punto di
minimo lo si ha per
; verso gli estremi
il periodo tende a infinito.
Allora, invece di
considerare il range che va
da -320 [mV] a +320 [mV],
si resta all’interno del range
che va da -200 [mV] a +200
[mV], in modo che la
variazione del periodo del
segnale sia più limitata. Si
utilizza anche un’altra
strategia: prendendo il periodo minimo del segnale, . Aspettando solo questo intervallo si
rischia di commettere un errore grossolano sulla misura. Conviene quindi aspettare un certo
numero di multipli interi di : se il segnale è costante (in realtà non lo è), si attende,
ad esempio, . Si calcola quindi il valore medio in 16 periodi, che sarà lo stesso per
ogni periodo nell’ipotesi di segnale costante. Se il periodo è sbagliato l’errore commesso
viene ripartito su 16 periodi invece che su uno solo, diminuendo in maniera sensibile l’errore
relativo. Riassumendo, viene risolto il problema del periodo variabile restringendo il campo
di funzionamento della sonda e contando un numero di periodi adeguato. Il vantaggio di
questo metodo è che, con l’aumentare di periodi che si è disposti ad aspettare, aumenta anche
la risoluzione con cui si acquisisce il segnale. Questo accorgimento permette di utilizzare lo
stesso sensore per diverse situazioni: misure rapide ma meno accurate, oppure misure più
lente (più periodi Tmin da aspettare) ma molto accurate.
Fig.10: Andamento del segnale in funzione del tempo
20
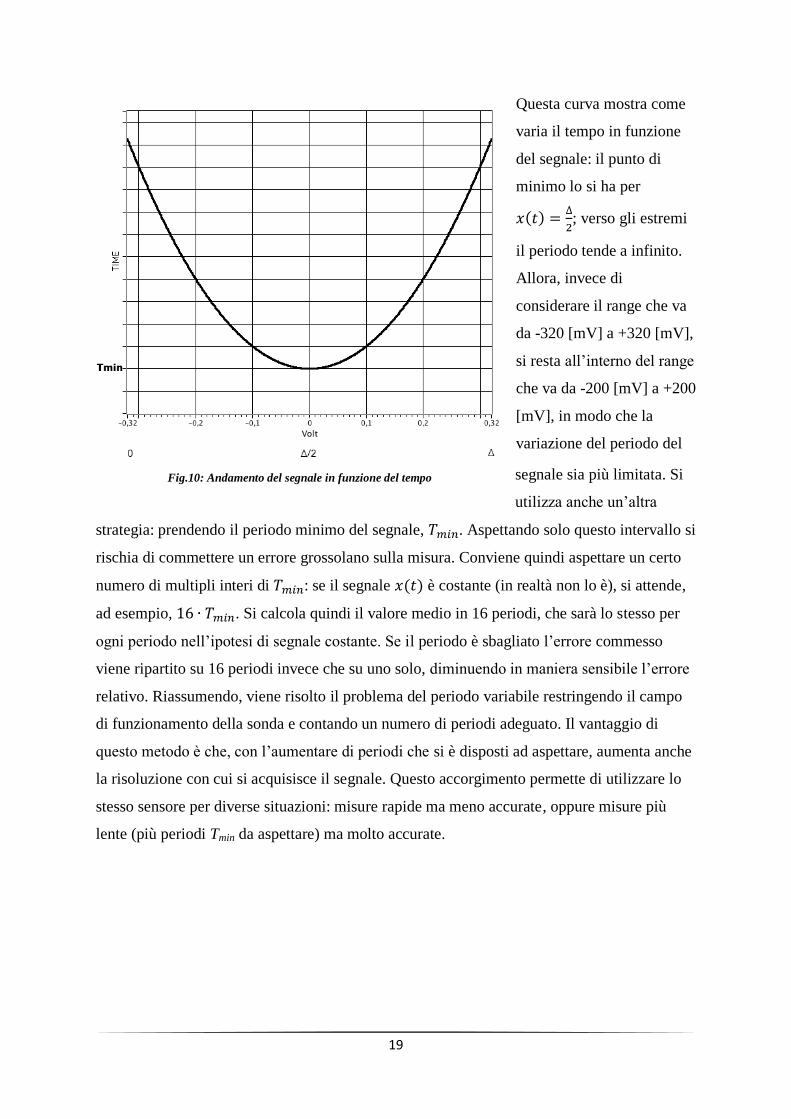
Fig.11: Rappresentazione schematica di un sistema di conversione Σ-Δ per la misura dei segnali di corrente.
Fig. 11: Principio di funzionamento di un convertitore Σ-Δ.
Fig.12: Rappresentazione conversione Σ-Δ per la misura dei segnali di corrente
21
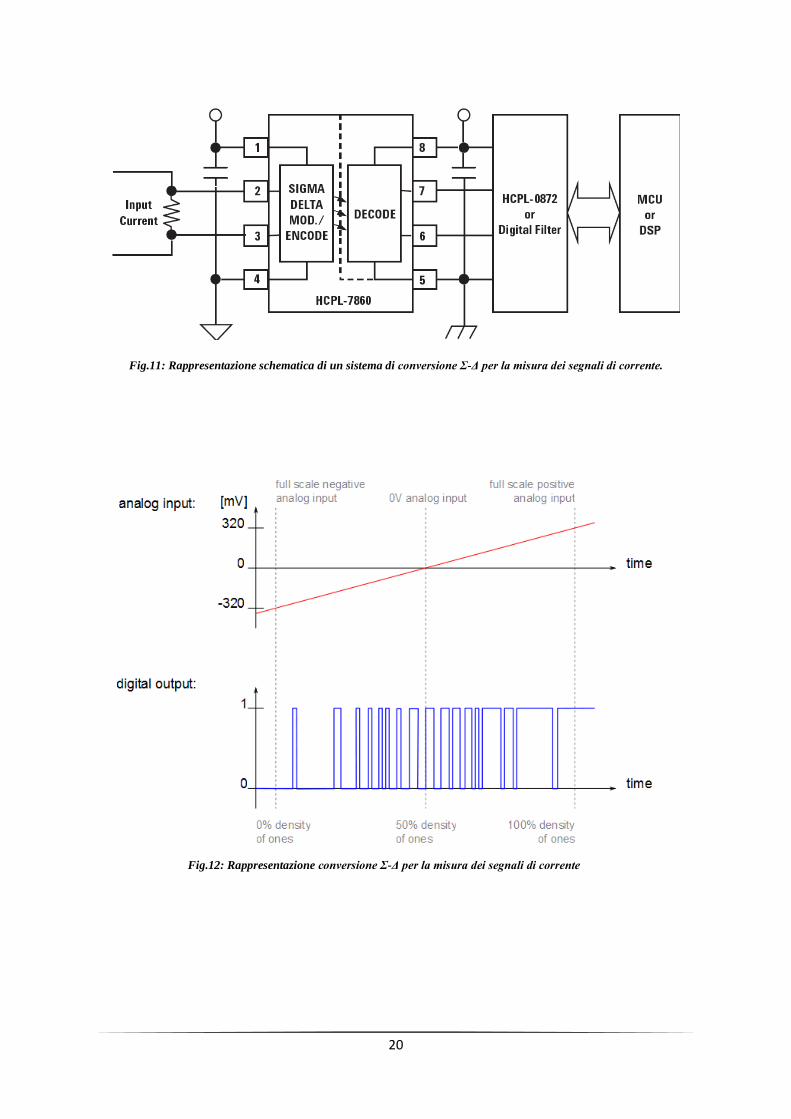
Ora viene considerata la procedura di integrazione: questa è implementata attraverso un filtro
di decimazione.
Fig. 13: Schema a blocchi di un filtro di decimazione
È composto da due parti: la prima, detta sigma stage, con i sommatori, e la seconda, detta
delta stage, con dei sottrattori. Si preleva il segnale digitale, con una frequenza del , e
viene fatto passare attraverso una serie di integratori (sommatori) successivi. Dopo che viene
completata questa serie di somme (una volta ogni 100 [ns]), si trasferisce il risultato al delta
stage, quello con i sottrattori. Questo stage lavora alla frequenza
, essendo N il numero dei
dati sommati. In questo caso vengono svolte sottrazioni successive in serie. Il numero di
componenti (sommatori/sottrattori) successivi che si hanno, è un parametro libero ed è pari
all’ordine del sistema. In letteratura si consiglia di utilizzarne 3. Nella prova sperimentale si
hanno N=32, con ordine del sistema pari a h = 3.
La risoluzione dipenderà dai valori scelti per N e h. N viene scelto in maniera tale che la
risoluzione risulti di 15 bit. Incrementare N per avere maggiore risoluzione (N=64 per 18 bit)
comporta un tempo di acquisizione doppio, che nel caso di N=32 vale 9.6 [μs]. Esiste quindi
un compromesso tra la risoluzione che si vuole ottenere e il tempo che si è disposti ad
aspettare.
Si introduce un altro problema: il segnale in realtà non è costante, ma varia. Però in 9.6
[μs] non ci si aspettano grandi variazioni delle correnti di fase del motore, ne a maggior
ragione della tensione di bus. È anche questo uno dei motivi per cui non ci si può permettere
il lusso di aspettare troppo tempo. Si considerino i 9.6 [μs] necessari: l’encoder impiega 6
22
[μs], mentre queste sonde ne impiegano 9.6 [μs]. Finché non si ha la posizione non è
possibile effettuare la trasformazione di coordinate, e dunque l’algoritmo di controllo non
può proseguire. Allo stesso modo, anche avendo la posizione, senza correnti non si ha alcun
dato da trasformare. È chiaro dunque che la sonda che fornisce la corrente fa da tappo di
bottiglia. Si potrebbe peggiorare la risoluzione della sonda di corrente per accelerare la
procedura. In realtà si utilizza un altro stratagemma: dato che si calcola un valor medio, si
anticipa l’acquisizione della sonda di corrente prima che inizi l’intervallo di campionamento,
in modo che a partire dall’inizio dell’intervallo di campionamento trascorrano solo 4.8 [μs]
prima che il dato sia disponibile, e dopo altri 1.2 [μs] è disponibile anche il dato dell’encoder.
Si è ottenuto anche un altro vantaggio: il valor medio calcolato con questa temporizzazione
sarà più vicino al valore effettivo della corrente nell’istante di campionamento.
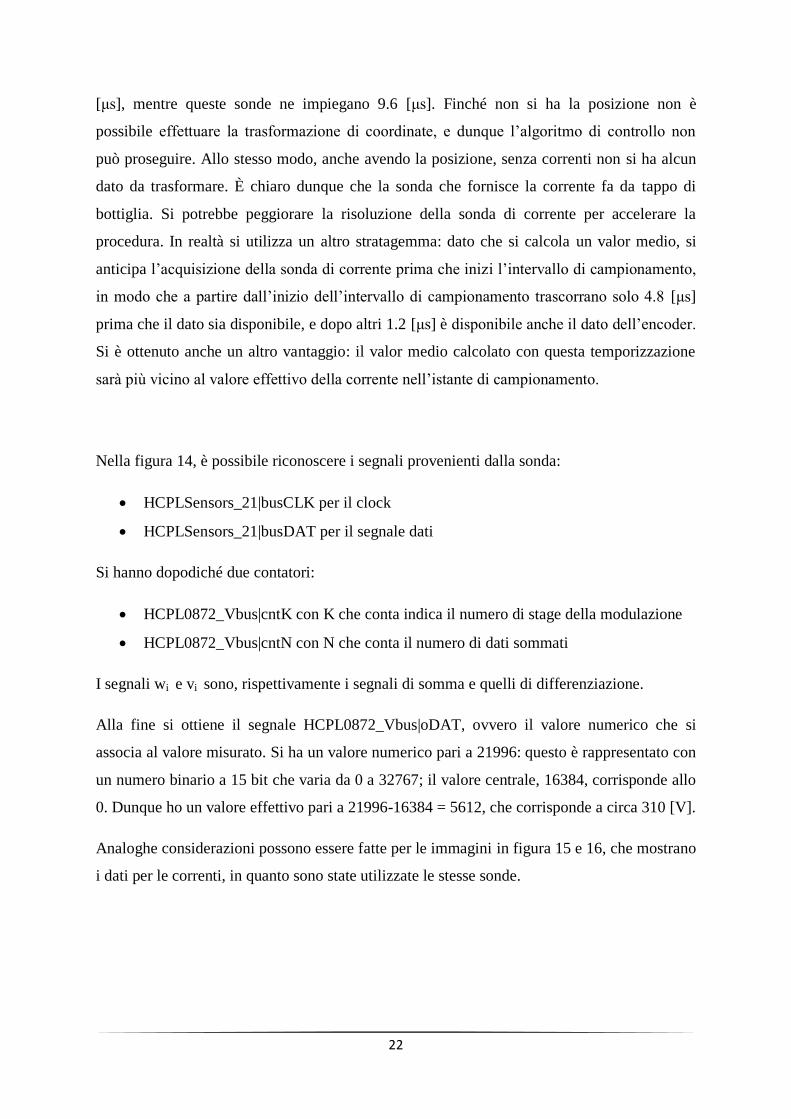
Nella figura 14, è possibile riconoscere i segnali provenienti dalla sonda:
HCPLSensors_21|busCLK per il clock
HCPLSensors_21|busDAT per il segnale dati
Si hanno dopodiché due contatori:
HCPL0872_Vbus|cntK con K che conta indica il numero di stage della modulazione
HCPL0872_Vbus|cntN con N che conta il numero di dati sommati
I segnali wi e vi sono, rispettivamente i segnali di somma e quelli di differenziazione.
Alla fine si ottiene il segnale HCPL0872_Vbus|oDAT, ovvero il valore numerico che si
associa al valore misurato. Si ha un valore numerico pari a 21996: questo è rappresentato con
un numero binario a 15 bit che varia da 0 a 32767; il valore centrale, 16384, corrisponde allo
0. Dunque ho un valore effettivo pari a 21996-16384 = 5612, che corrisponde a circa 310 [V].
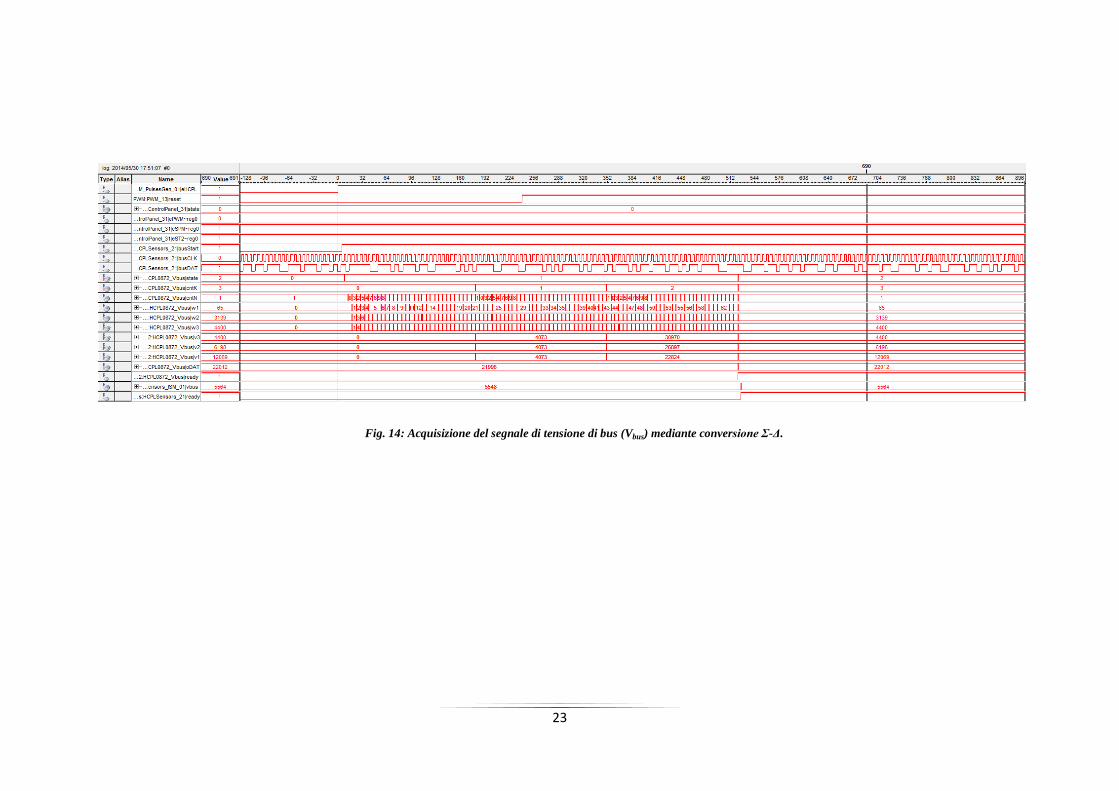
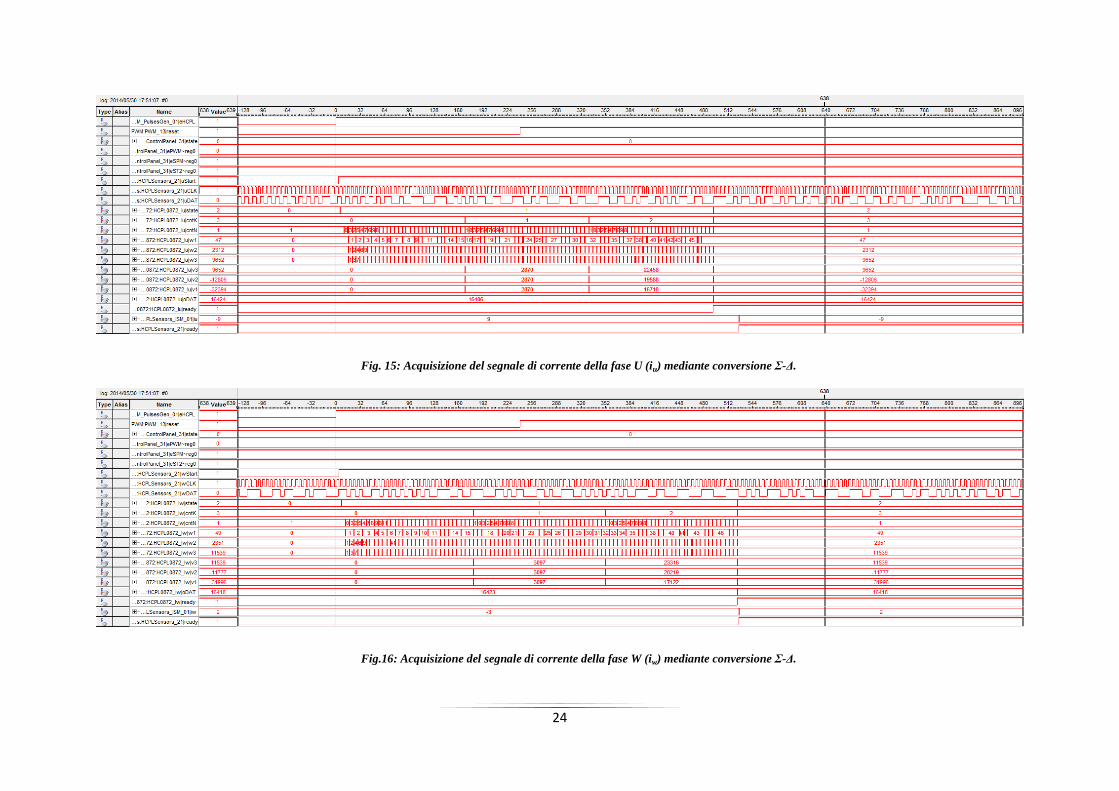
Analoghe considerazioni possono essere fatte per le immagini in figura 15 e 16, che mostrano
i dati per le correnti, in quanto sono state utilizzate le stesse sonde.
23
Fig. 14: Acquisizione del segnale di tensione di bus (Vbus) mediante conversione Σ-Δ.
24
Fig. 15: Acquisizione del segnale di corrente della fase U (iu) mediante conversione Σ-Δ.
Fig.16: Acquisizione del segnale di corrente della fase W (iw) mediante conversione Σ-Δ.
25
LEZIONE DEL 5 GIUGNO 2014 – PULSE WIDTH
MODULATION
Premessa
Durante le simulazioni precedenti si è potuto osservare come, una volta calcolati i valori di
tensione da applicare per ottenere determinate correnti, quindi coppie e velocità, è necessario
costruire dei segnali di comando per gli interruttori che costituiscono il convertitore, in modo
da poter poi applicare i segnali desiderati al motore. La tensione da applicare è vincolata al
valore di bus, il valore ai capi del convertitore che si sta utilizzando. Avendo a disposizione
quindi un solo valore, ottenuto raddrizzando opportunamente la tensione di linea, è necessario
applicarlo per un certo intervallo di tempo in modo da ottenere un valore medio di tensione
applicata equivalente a quello desiderato. Questa procedura è chiamata Tecnica della
Modulazione di Impulso (la tecnica PWM). Le tensioni applicate alla macchina sono
costruite modulando degli impulsi di forma rettangolare, di larghezza proporzionale al valore
di riferimento.
Questo risultato lo si ottiene prendendo il segnale di riferimento V*, che viene dal sistema di
controllo, e confrontandolo con una portante a forma triangolare all’interno di un periodo di
campionamento Ts. In questo modo si riesce a controllare una singola gamba del convertitore
con due segnali, uno che comanda l’interruttore alto e uno che comanda l’interruttore basso
della gamba. Il valore medio della tensione ottenuta, controllando gli interruttori della gamba,
è proprio pari a V*, ottenendo l’uguaglianza dei due segnali dal punto di vista matematico.
Il convertitore è costituito da tre gambe, chiamate generalmente u, v e w. In simulazione si è
deciso di controllarle singolarmente in maniera autonoma, quindi i segnali che controllano i
singoli interruttori alto e basso sono stati costruiti soltanto in funzione della gamba che
devono controllare. Questo modo di procedere funziona, ma non è un procedimento
ottimizzato. Il controllo della singola gamba senza tener conto delle altre non considera il
fatto che si sta alimentando un motore trifase. Il rischio è quello di ottenere si un risultato
soddisfacente dal punto di vista del controllo, ma utilizzando più tensione di quella
strettamente necessaria.
26
Ci si può accorgere di questo fatto facendo alcune considerazioni: fornendo un segnale V*
maggiore di V/2 , o minore di -V/2 , il segnale in uscita viene tagliato, si va in saturazione di
tensione. Si sta chiedendo al sistema di applicare una tensione di cui non dispone, e ciò si
traduce nel fatto che il sistema tiene una coppia di interruttori chiusi, o un solo interruttore,
per tutto il tempo massimo (pari a Ts). Non si riesce poi a ottenere il valore di tensione
desiderato. In realtà sulle tensioni concatenate, e non più sulle tensioni fase-gnd, si può
applicare una tensione V o –V, controllando opportunamente gli interruttori sulle gambe.
Sapendo che l’alimentazione del motore è sinusoidale, e che il valore massimo è pari a V, le
corrispondenti tensioni di fase dovrebbero avere un valore massimo di
. In realtà,
eseguendo la modulazione, si hanno delle tensioni con un valore massimo pari a V/2. Ciò
vuol dire che non si riesce a realizzare delle tensioni di fase più elevate. Con la modulazione
della gamba singola e indipendente dalle altre, viene fuori che non si riesce a sfruttare circa il
15% della tensione.
Quando si vuole cercare di ottimizzare il controllo cercando di sfruttare al massimo la
tensione, è evidente che tale strategia di controllo non si può utilizzare. Avere inoltre più
tensione significa avere un sistema più performante e un utilizzo migliore di tutti i
componenti che fanno parte del controllo.
Per realizzare un sistema di controllo più efficace si parte dall’unico vincolo presente; ai capi
dei morsetti (u-v), (v-w) e (w-u) non si può applicare una tensione maggiore di quella di bus.
È sulla tensione concatenata che si ha il vincolo, e questa tensione dipende esclusivamente da
come si comandano gli switch. Dai calcoli ne risulta che la tensione ai capi di due fasi
generiche dipende soltanto dai duty cycles degli interruttori nelle due fasi. In funzione quindi
della scelta di questi duty cycles si può modulare la tensione a piacimento.
Ragionare sulle tensioni concatenate e non più su quelle di fase porta diversi vantaggi.
Innanzitutto si possono rappresentare le tensioni con i delta T, cioè con le larghezze di
impulso. Altro vantaggio è che, per come sono definite, la loro somma è sempre pari a zero.
Questo è molto importante perché permette di dire che, escludendo il caso in cui tutte e tre
sono uguali a zero, almeno una è positiva, una è negativa, mentre la terza può essere positiva
o negativa. Quindi se due sono positive e una negativa, la più grande in modulo sarà quella
negativa, e viceversa. La tensione più grande è quella che crea più problemi: se si riesce a
realizzare questa tensione nel Ts, allora sicuramente le altre due sono certamente realizzabili.
In tutto si hanno 6 possibilità (chiamati anche settori, in riferimento alla tabella che si
27
costruisce), combinando tutti i possibili segni. In funzione della combinazione variano gli
stati degli switch.
SI procede in questo modo: arrivano le tre tensione concatenate, si controlla il segno, e si
verifica in quale delle 6 combinazioni si presenta. Trovandosi nel primo settore, per esempio,
la tensione (u-v) è quella più grande e positiva, mentre le altre due sono più piccole e
negative. Di fatto però dei 6 casi possibili se ne considerano solo 2, quando la tensione più
grande è positiva e quando è negativa, gli altri casi ruotano semplicemente gli indici.
Modulando gli impulsi per ogni settore, o combinazione, si fa variare il valore medio della
tensione. In questo caso ci si accorge che, modulando opportunamente gli switch, una gamba
delle tre rimane sempre ferma e ogni gamba modula per 4 settori su 6, mentre per due sta
ferma. Se si muovesse sarebbe controproducente: il problema della modulazione
indipendente di ogni singola gamba è proprio questo, tutte si muovevano. Questo tipo di
modulazione è decisamente più efficiente, non richiede calcoli aggiuntivi, ma solo
l’indirizzamento dei segnali, per esempio con delle look-up table.
Il problema di questo procedimento è che le commutazioni all’interno dell’inverter non sono
ideali, non si riesce infatti a chiudere un interruttore e aprirne un altro contemporaneamente.
Si rischia infatti di avere un istante in cui entrambi gli interruttori sono chiusi, in quanto le
aperture e le chiusure non sono istantanee, creando problemi di corto circuito.
Per questo motivo le commutazioni vanno gestite in modo opportuno. Se si vuole essere
sicuri che un interruttore sia aperto prima di chiudere l’altro si deve introdurre un certo
intervallo temporale tra le due operazioni. Questo intervallo viene chiamato Tempo Morto,
in cui entrambi gli interruttori sono aperti. Questo crea però anche un problema in quanto non
si conosce il potenziale del punto; si deve capire come gestire tale potenziale in questo lasso
di tempo. Nella prova sperimentale che viene svolta, e nei calcoli eseguiti, il tempo morto è
di 1 [μs], più un altro μs perché si deve fare da entrambe le parti. Quindi su 100 [μs] si ha un
errore del 2 %. Questo errore può diventare non trascurabile, dipende dall’applicazione che si
sta considerando. Si immagini infatti di raddoppiare la frequenza, avendo quindi un tempo di
campionamento di 50 [μs], l’errore diventa del 4%.
Per tener conto di questo tempo morto si può fare una compensazione approssimativa, per
esempio stringendo leggermente l’impulso dell’interruttore positivo e allargando quello
28
dell’interruttore negativo (ampliando la parte di zero), in modo che ciascuno compensi il
50%. È una soluzione accettabile.
Un altro metodo più efficace si basa sulla conoscenza del verso della corrente, e quindi del
comportamento del sistema quando i due interruttori sono aperti. Invece di diminuire la
larghezza dell’ impulso e allargare l’altro si può fare solamente una delle due cose in
funzione del verso della corrente, effettuando una compensazione del tempo morto più
intelligente ed efficace. Questo metodo necessita particolare attenzione in quanto la lettura e
la conoscenza della corrente, fondamentale in questo caso, può presentare alcuni problemi:
uno di questi è lo “zero crossing”, ovvero l’attraversamento dello zero. Se non controllati
questi problemi di misura portano inevitabilmente a errori sugli algoritmi di controllo, che
sarebbero maggiori di quelli che si intendeva eliminare facendo una compensazione più
intelligente.
Una volta scelto quale algoritmo di compensazione utilizzare, non rimane che calcolare gli
istanti di commutazione. Il programma deve infatti decidere gli istanti, che sono in tutto 4, in
cui aprire e chiudere gli interruttori. I segnali si possono calcolare, come detto, in funzione
del segno delle correnti che vengono campionate all’inizio di ogni intervallo.
Nella tecnica PWM non è possibile realizzare impulsi troppo ristretti (troppo piccoli), in
quanto gli interruttori necessitano di un tempo fisiologico per aprire o chiudersi, non sono
istantanei. Il Minimum Pass Width, quindi l’ampiezza minima di impulso, è di 0,8 [μs]. Gli
interruttori impiegano circa 500-600 [ns] per le operazioni di chiusura/apertura, quindi dare
un comando di chiusura, ad esempio, mentre il dispositivo sta ancora aprendo, non porta
alcun beneficio: l’impulso viene tagliato.
Per programmare l’FPGA si utilizza un software che va a generare i segnali PWM, che poi
verranno visualizzati sull’oscilloscopio. Si parte ora con l’analisi della prova sperimentale.
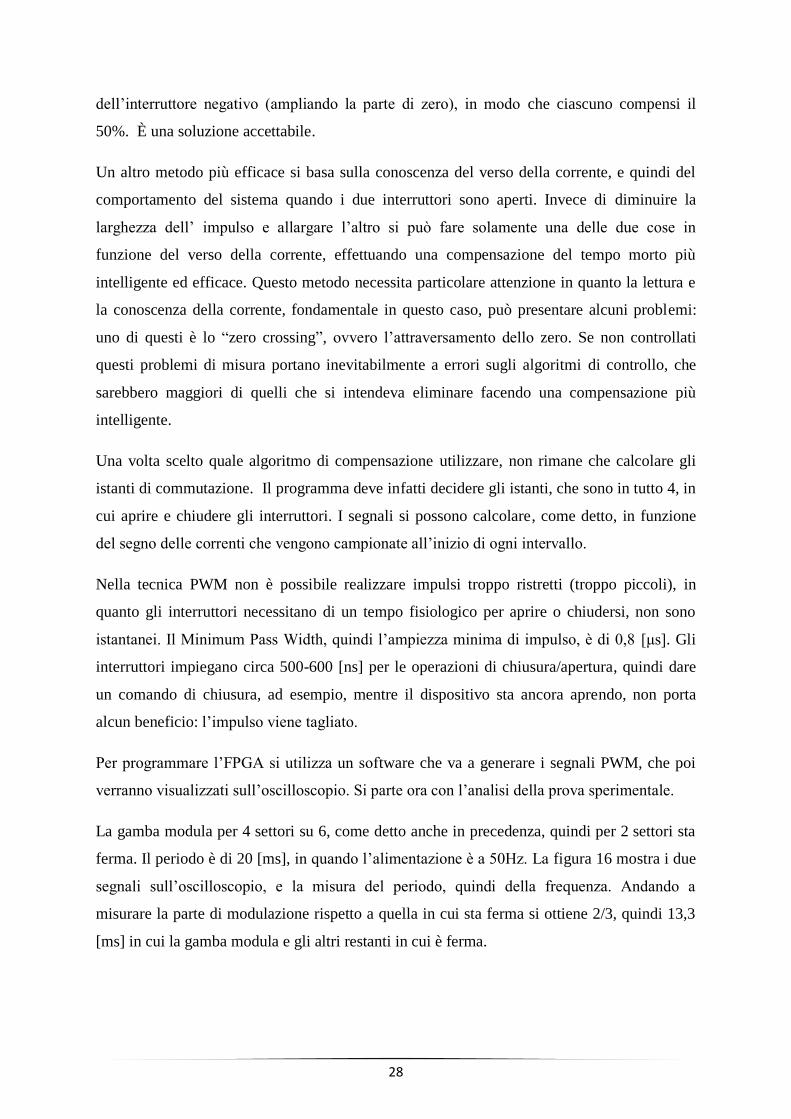
La gamba modula per 4 settori su 6, come detto anche in precedenza, quindi per 2 settori sta
ferma. Il periodo è di 20 [ms], in quando l’alimentazione è a 50Hz. La figura 16 mostra i due
segnali sull’oscilloscopio, e la misura del periodo, quindi della frequenza. Andando a
misurare la parte di modulazione rispetto a quella in cui sta ferma si ottiene 2/3, quindi 13,3
[ms] in cui la gamba modula e gli altri restanti in cui è ferma.
29
Fig.17: Evoluzione dei segnali PWM relativi ai due interruttori di una gamba dell’inverter (X+ in giallo, X-
in verde).
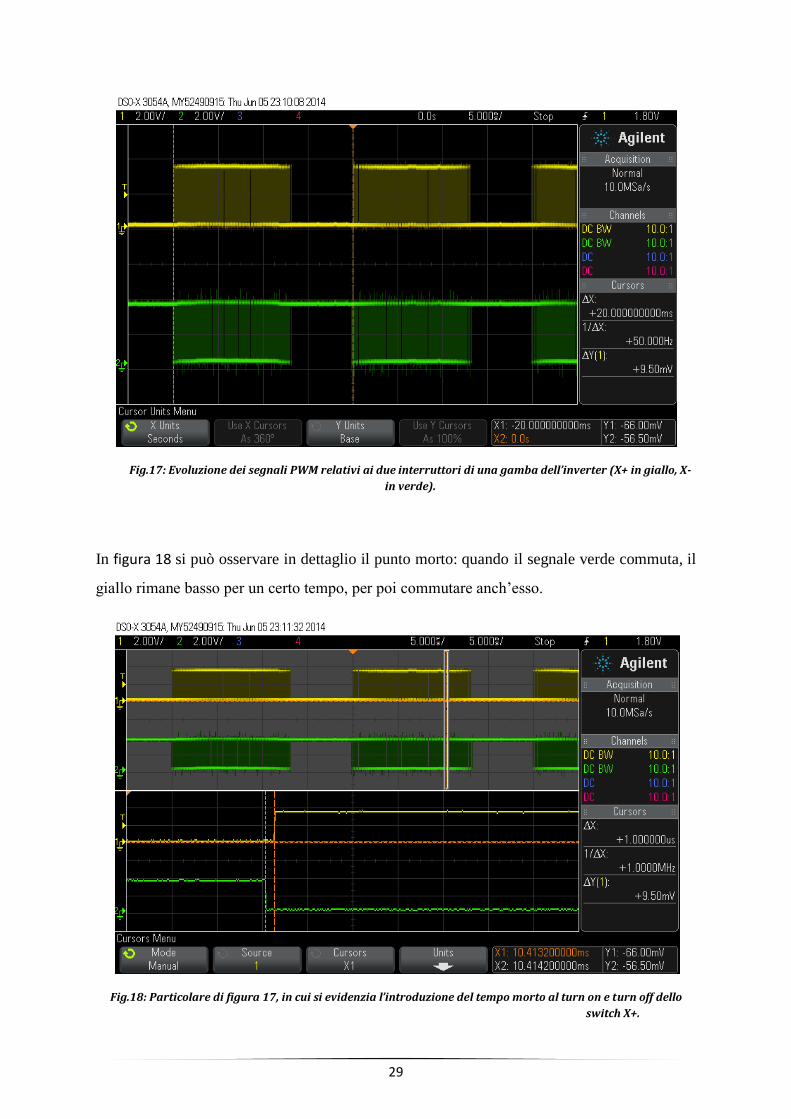
In figura 18 si può osservare in dettaglio il punto morto: quando il segnale verde commuta, il
giallo rimane basso per un certo tempo, per poi commutare anch’esso.
Fig.18: Particolare di figura 17, in cui si evidenzia l’introduzione del tempo morto al turn on e turn off dello
switch X+.
30
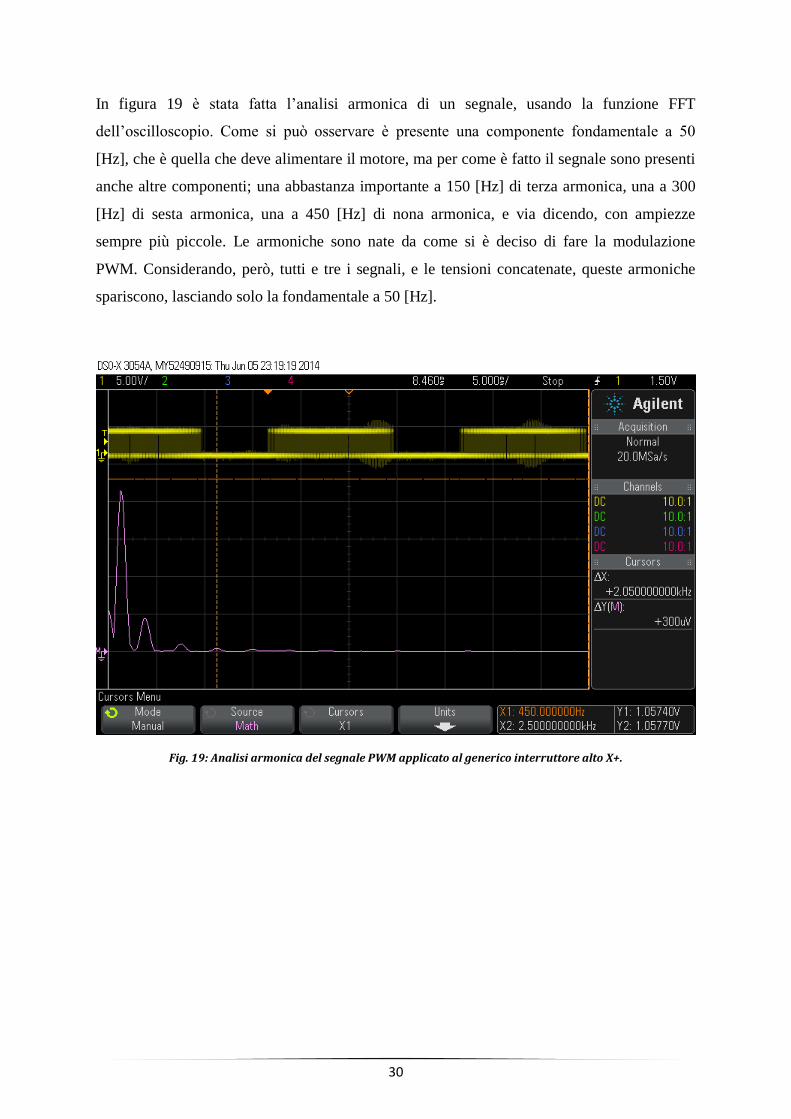
In figura 19 è stata fatta l’analisi armonica di un segnale, usando la funzione FFT
dell’oscilloscopio. Come si può osservare è presente una componente fondamentale a 50
[Hz], che è quella che deve alimentare il motore, ma per come è fatto il segnale sono presenti
anche altre componenti; una abbastanza importante a 150 [Hz] di terza armonica, una a 300
[Hz] di sesta armonica, una a 450 [Hz] di nona armonica, e via dicendo, con ampiezze
sempre più piccole. Le armoniche sono nate da come si è deciso di fare la modulazione
PWM. Considerando, però, tutti e tre i segnali, e le tensioni concatenate, queste armoniche
spariscono, lasciando solo la fondamentale a 50 [Hz].
Fig. 19: Analisi armonica del segnale PWM applicato al generico interruttore alto X+.
31
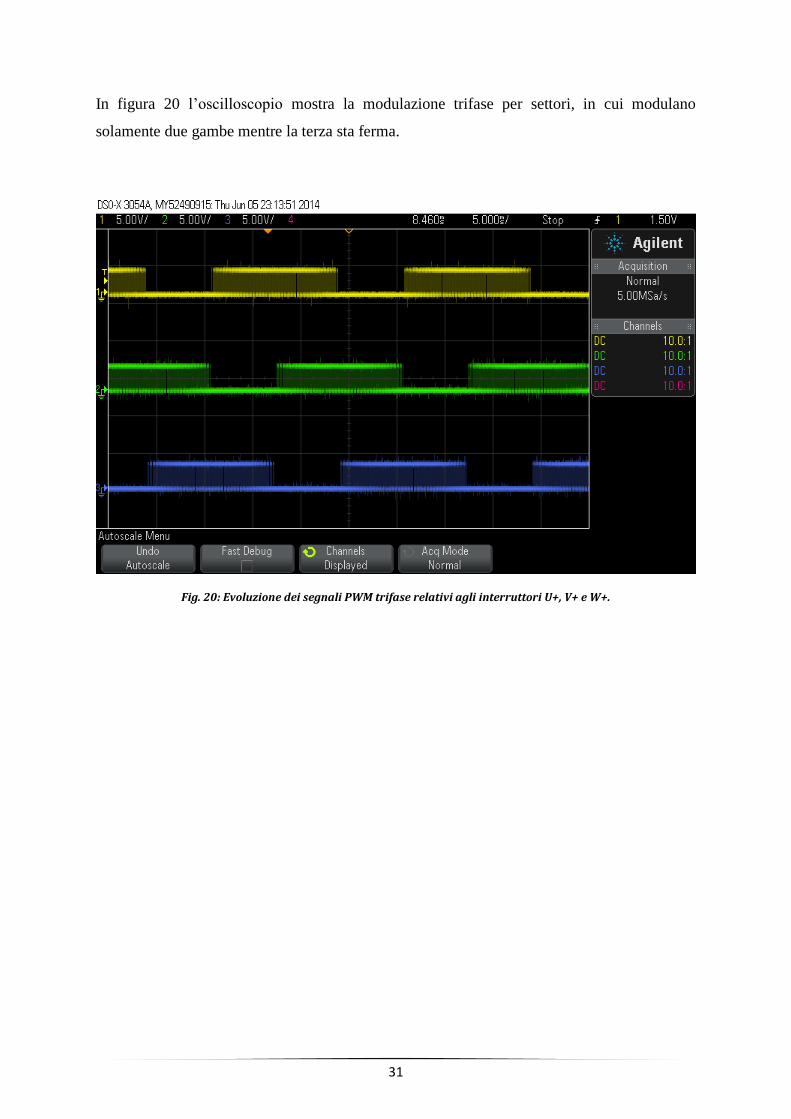
In figura 20 l’oscilloscopio mostra la modulazione trifase per settori, in cui modulano
solamente due gambe mentre la terza sta ferma.
Fig. 20: Evoluzione dei segnali PWM trifase relativi agli interruttori U+, V+ e W+.
32
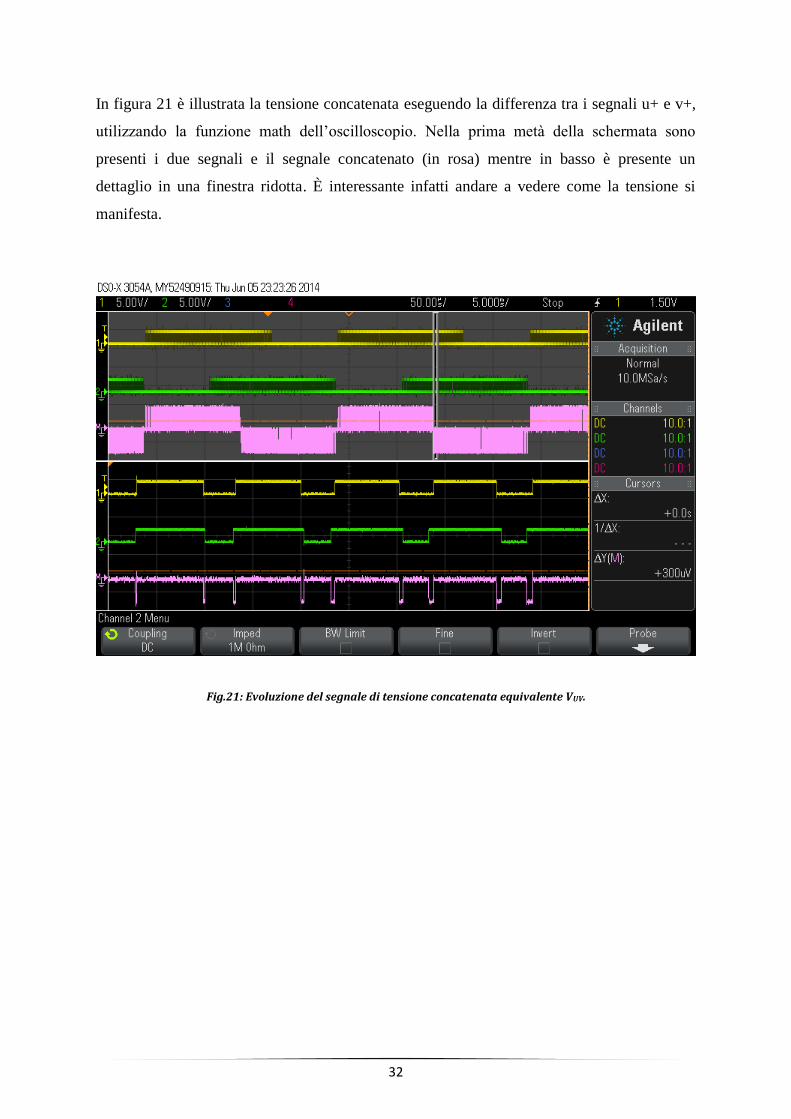
In figura 21 è illustrata la tensione concatenata eseguendo la differenza tra i segnali u+ e v+,
utilizzando la funzione math dell’oscilloscopio. Nella prima metà della schermata sono
presenti i due segnali e il segnale concatenato (in rosa) mentre in basso è presente un
dettaglio in una finestra ridotta. È interessante infatti andare a vedere come la tensione si
manifesta.
Fig.21: Evoluzione del segnale di tensione concatenata equivalente VUV.
33
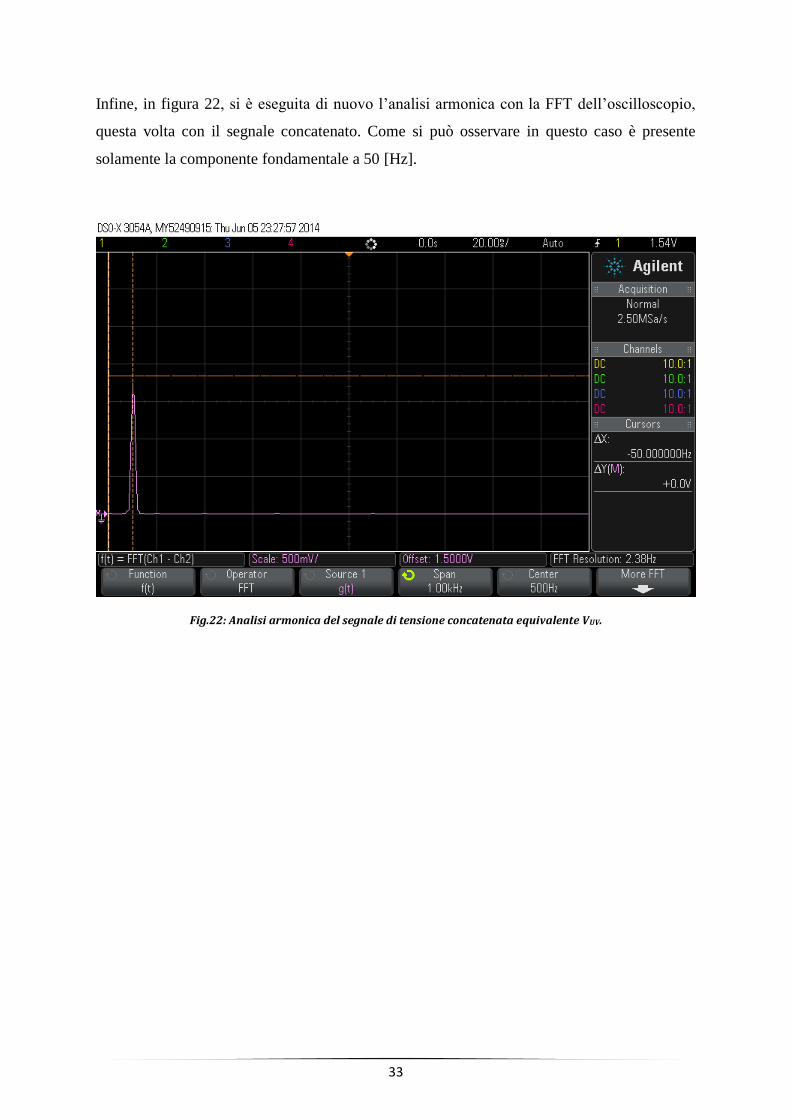
Infine, in figura 22, si è eseguita di nuovo l’analisi armonica con la FFT dell’oscilloscopio,
questa volta con il segnale concatenato. Come si può osservare in questo caso è presente
solamente la componente fondamentale a 50 [Hz].
Fig.22: Analisi armonica del segnale di tensione concatenata equivalente VUV.
34
LEZIONE DEL 6 GIUGNO 2014 – PROVE SPERIMENTALI
Premessa
Sono state viste nella trattazione teorica tre strategie di controllo:
- CTA: prevede che si imponga id = 0; da solo la componente di coppia;
- CMFL: è la strategia a modulo di flusso costante, pari a quello del magnete. Prevede una
certa componente id;
- UPF: è la strategia a fattore di potenza unitario. Richiede di porre il vettore di corrente
perfettamente in fase con il vettore di tensione.
Queste tre strategie danno la stessa coppia, in modo differente, nella quale di impone una
certa corrente id: nulla nel primo caso, nel secondo di una certa entità e nel terzo caso ancora
più grande.
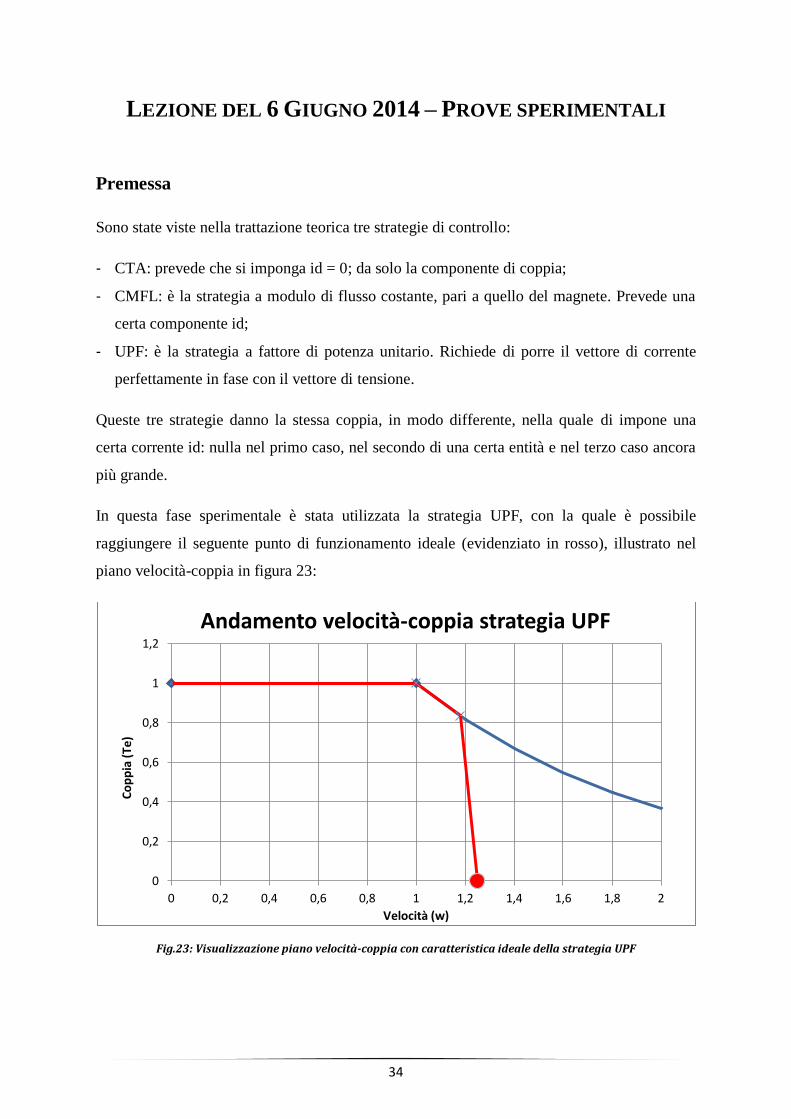
In questa fase sperimentale è stata utilizzata la strategia UPF, con la quale è possibile
raggiungere il seguente punto di funzionamento ideale (evidenziato in rosso), illustrato nel
piano velocità-coppia in figura 23:
Fig.23: Visualizzazione piano velocità-coppia con caratteristica ideale della strategia UPF
0
0,2
0,4
0,6
0,8
1
1,2
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2
Co
pp
ia (
Te)
Velocità (w)
Andamento velocità-coppia strategia UPF
35
In cui si riesce a raggiungere circa il 25 % in più della velocità nominale (quindi 1.25 volte la
velocità).
Con la strategia UPF si ottiene una regione a potenza costante più ampia rispetto a ciò che si
ottiene con le altre strategie. Quindi si dovrebbero ottenere delle prestazioni migliori.
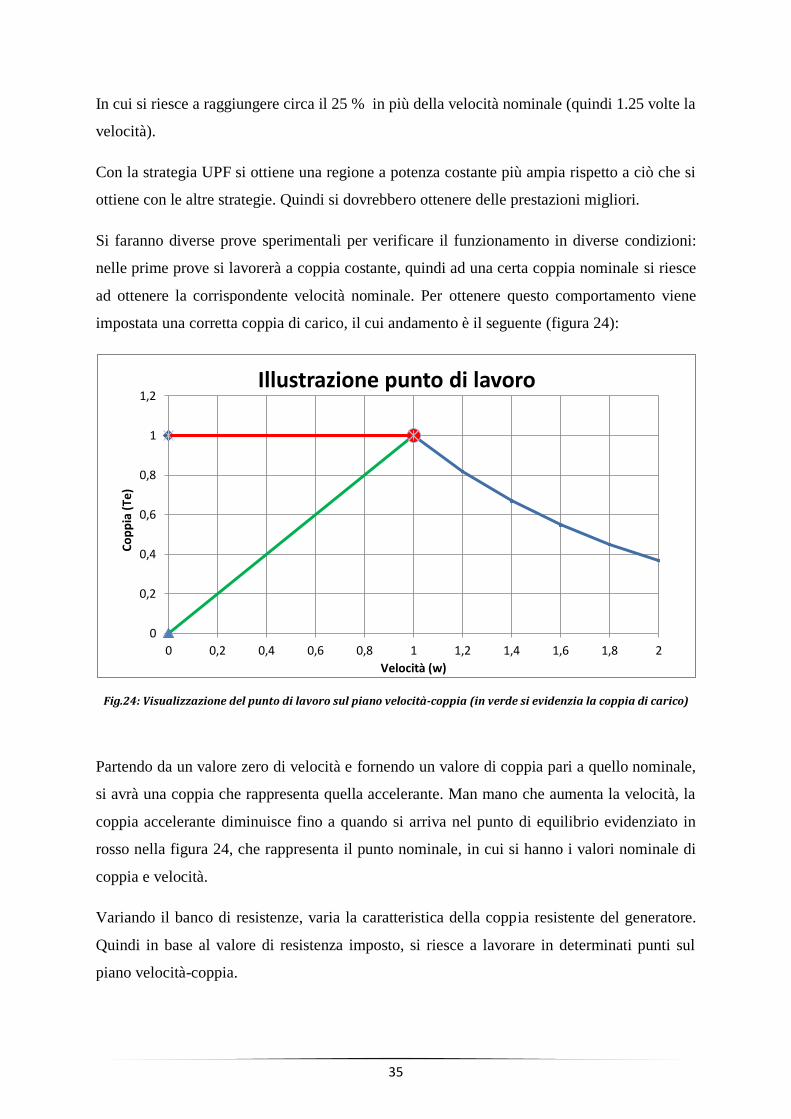
Si faranno diverse prove sperimentali per verificare il funzionamento in diverse condizioni:
nelle prime prove si lavorerà a coppia costante, quindi ad una certa coppia nominale si riesce
ad ottenere la corrispondente velocità nominale. Per ottenere questo comportamento viene
impostata una corretta coppia di carico, il cui andamento è il seguente (figura 24):
Fig.24: Visualizzazione del punto di lavoro sul piano velocità-coppia (in verde si evidenzia la coppia di carico)
Partendo da un valore zero di velocità e fornendo un valore di coppia pari a quello nominale,
si avrà una coppia che rappresenta quella accelerante. Man mano che aumenta la velocità, la
coppia accelerante diminuisce fino a quando si arriva nel punto di equilibrio evidenziato in
rosso nella figura 24, che rappresenta il punto nominale, in cui si hanno i valori nominale di
coppia e velocità.
Variando il banco di resistenze, varia la caratteristica della coppia resistente del generatore.
Quindi in base al valore di resistenza imposto, si riesce a lavorare in determinati punti sul
piano velocità-coppia.
0
0,2
0,4
0,6
0,8
1
1,2
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2
Co
pp
ia (
Te)
Velocità (w)
Illustrazione punto di lavoro
36
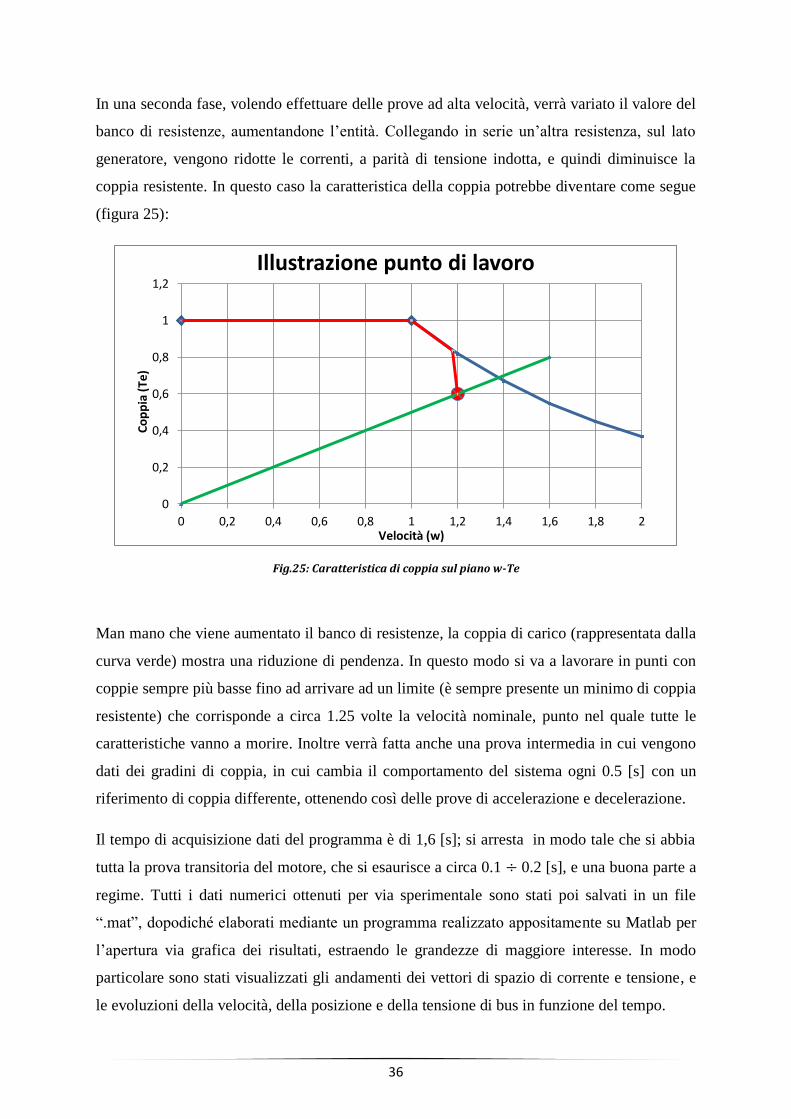
In una seconda fase, volendo effettuare delle prove ad alta velocità, verrà variato il valore del
banco di resistenze, aumentandone l’entità. Collegando in serie un’altra resistenza, sul lato
generatore, vengono ridotte le correnti, a parità di tensione indotta, e quindi diminuisce la
coppia resistente. In questo caso la caratteristica della coppia potrebbe diventare come segue
(figura 25):
Fig.25: Caratteristica di coppia sul piano w-Te
Man mano che viene aumentato il banco di resistenze, la coppia di carico (rappresentata dalla
curva verde) mostra una riduzione di pendenza. In questo modo si va a lavorare in punti con
coppie sempre più basse fino ad arrivare ad un limite (è sempre presente un minimo di coppia
resistente) che corrisponde a circa 1.25 volte la velocità nominale, punto nel quale tutte le
caratteristiche vanno a morire. Inoltre verrà fatta anche una prova intermedia in cui vengono
dati dei gradini di coppia, in cui cambia il comportamento del sistema ogni 0.5 [s] con un
riferimento di coppia differente, ottenendo così delle prove di accelerazione e decelerazione.
Il tempo di acquisizione dati del programma è di 1,6 [s]; si arresta in modo tale che si abbia
tutta la prova transitoria del motore, che si esaurisce a circa 0.1 0.2 [s], e una buona parte a
regime. Tutti i dati numerici ottenuti per via sperimentale sono stati poi salvati in un file
“.mat”, dopodiché elaborati mediante un programma realizzato appositamente su Matlab per
l’apertura via grafica dei risultati, estraendo le grandezze di maggiore interesse. In modo
particolare sono stati visualizzati gli andamenti dei vettori di spazio di corrente e tensione, e
le evoluzioni della velocità, della posizione e della tensione di bus in funzione del tempo.
0
0,2
0,4
0,6
0,8
1
1,2
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2
Co
pp
ia (
Te)
Velocità (w)
Illustrazione punto di lavoro
37
PROVA 1
Come test iniziale viene effettuata una verifica di sicurezza: viene data una coppia bassa per
testare la caratteristica del sistema (senza raggiungere eccessive velocità), in maniera tale da
non provocare danni al motore. Se il tutto funziona, è possibile aumentare la coppia, andando
a lavorare nel punto prestabilito. In particolare è stata imposta una coppia pari a 8 (con
corrispondente valore numerico: 8*265 = 2048), meno di ¼ della coppia nominale (essendo
pari a 9000).
In un primo momento, senza aver alimentato il motore, è stato possibile visualizzare il
segnale dell’encoder, essendo già alimentato, mediante il programma di acquisizione. Tutti
gli altri segnali sono circa pari a zero. Compiuta la verifica, è stato possibile aumentare
ulteriormente la coppia, e dopo varie prove con velocità man mano crescenti, si è arrivati ad
impostare la coppia pari a quella massima nominale, ovvero C=9216 (corrispondente a 36).
In realtà la coppia rilevata dal motore e misurata dal programma è stata = 8996.
I grafici riportati in seguito sono i risultati ottenuti in questa prima prova.
In modo particolare, nella figura 26, sono riportate le componenti diretta (in rosso) e in
quadratura (in blu) dei vettori di spazio di corrente e tensione: la linea di colore azzurro
rappresenta la coppia di riferimento e non è ben visibile essendo coperta dalla linea blu
ottenuta sperimentalmente; ciò significa che il sistema segue ottimamente l’andamento di
riferimento che è stato imposto. Lo stesso vale per la linea viola di riferimento, alla quale si
sovrappone la linea rossa sperimentale. Quindi in questo primo caso, il sistema ben risponde
ai set point impostati per eseguire la prova.
38
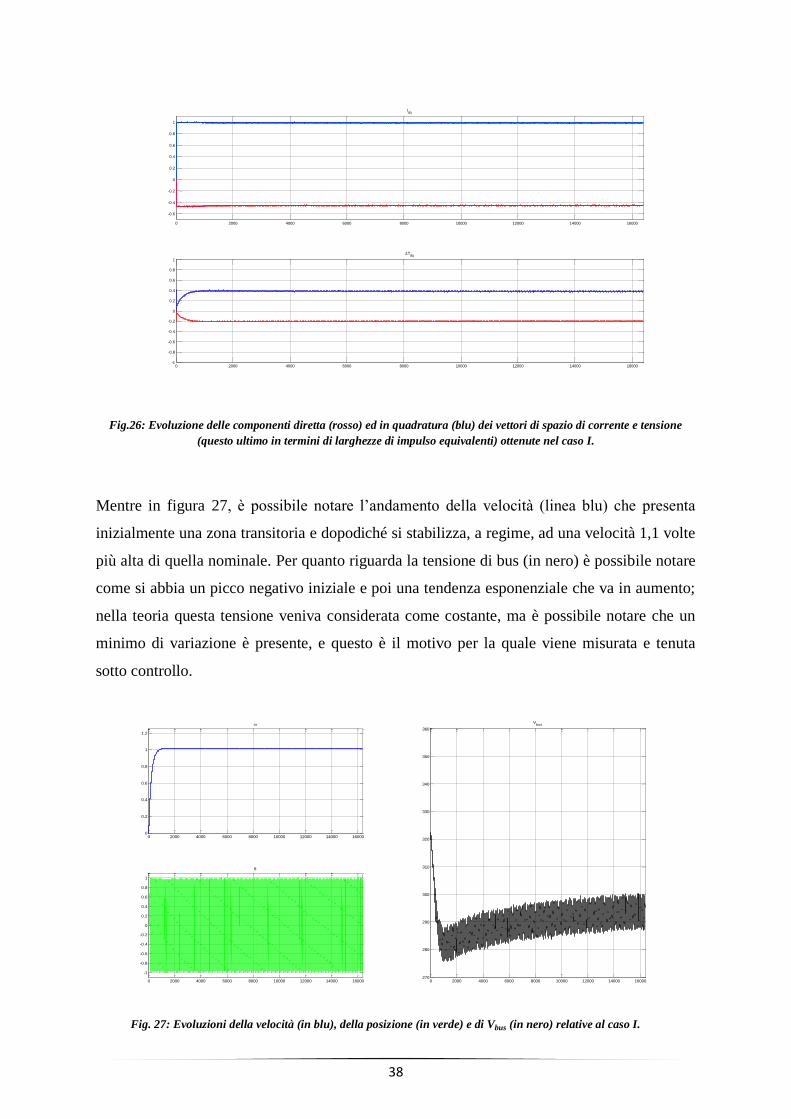
Fig.26: Evoluzione delle componenti diretta (rosso) ed in quadratura (blu) dei vettori di spazio di corrente e tensione
(questo ultimo in termini di larghezze di impulso equivalenti) ottenute nel caso I.
Mentre in figura 27, è possibile notare l’andamento della velocità (linea blu) che presenta
inizialmente una zona transitoria e dopodiché si stabilizza, a regime, ad una velocità 1,1 volte
più alta di quella nominale. Per quanto riguarda la tensione di bus (in nero) è possibile notare
come si abbia un picco negativo iniziale e poi una tendenza esponenziale che va in aumento;
nella teoria questa tensione veniva considerata come costante, ma è possibile notare che un
minimo di variazione è presente, e questo è il motivo per la quale viene misurata e tenuta
sotto controllo.
0 2000 4000 6000 8000 10000 12000 14000 16000
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Idq
0 2000 4000 6000 8000 10000 12000 14000 16000-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Tdq
0 2000 4000 6000 8000 10000 12000 14000 160000
0.2
0.4
0.6
0.8
1
1.2
0 2000 4000 6000 8000 10000 12000 14000 16000
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0 2000 4000 6000 8000 10000 12000 14000 16000270
280
290
300
310
320
330
340
350
360
Vbus
Fig. 27: Evoluzioni della velocità (in blu), della posizione (in verde) e di Vbus (in nero) relative al caso I.
39
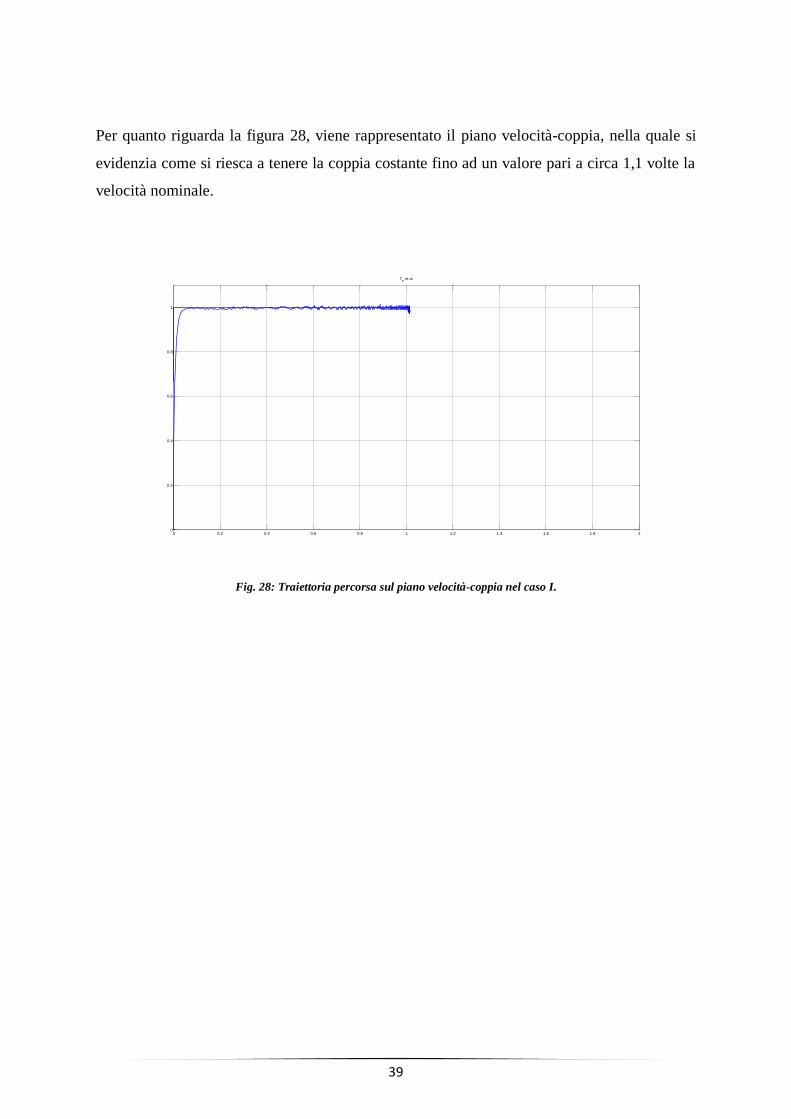
Per quanto riguarda la figura 28, viene rappresentato il piano velocità-coppia, nella quale si
evidenzia come si riesca a tenere la coppia costante fino ad un valore pari a circa 1,1 volte la
velocità nominale.
Fig. 28: Traiettoria percorsa sul piano velocità-coppia nel caso I.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.2
0.4
0.6
0.8
1
Te vs w
40
0 100 200 300 400 500 600 700 800 900 1000
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Idq
0 100 200 300 400 500 600 700 800 900 1000-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Tdq
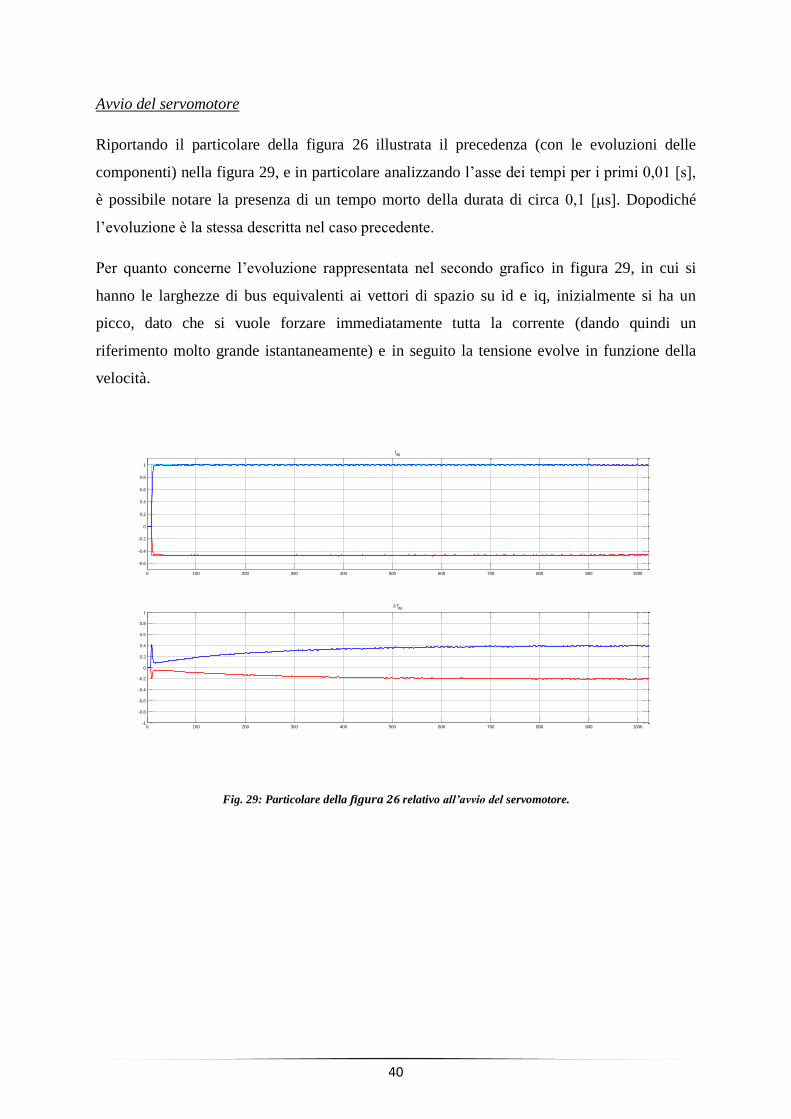
Avvio del servomotore
Riportando il particolare della figura 26 illustrata il precedenza (con le evoluzioni delle
componenti) nella figura 29, e in particolare analizzando l’asse dei tempi per i primi 0,01 [s],
è possibile notare la presenza di un tempo morto della durata di circa 0,1 [μs]. Dopodiché
l’evoluzione è la stessa descritta nel caso precedente.
Per quanto concerne l’evoluzione rappresentata nel secondo grafico in figura 29, in cui si
hanno le larghezze di bus equivalenti ai vettori di spazio su id e iq, inizialmente si ha un
picco, dato che si vuole forzare immediatamente tutta la corrente (dando quindi un
riferimento molto grande istantaneamente) e in seguito la tensione evolve in funzione della
velocità.
Fig. 29: Particolare della figura 26 relativo all’avvio del servomotore.
41
0 100 200 300 400 500 600 700 800 900 1000
-1
-0.5
0
0.5
1
Iuvw
0 100 200 300 400 500 600 700 800 900 1000
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Tuvvw w u
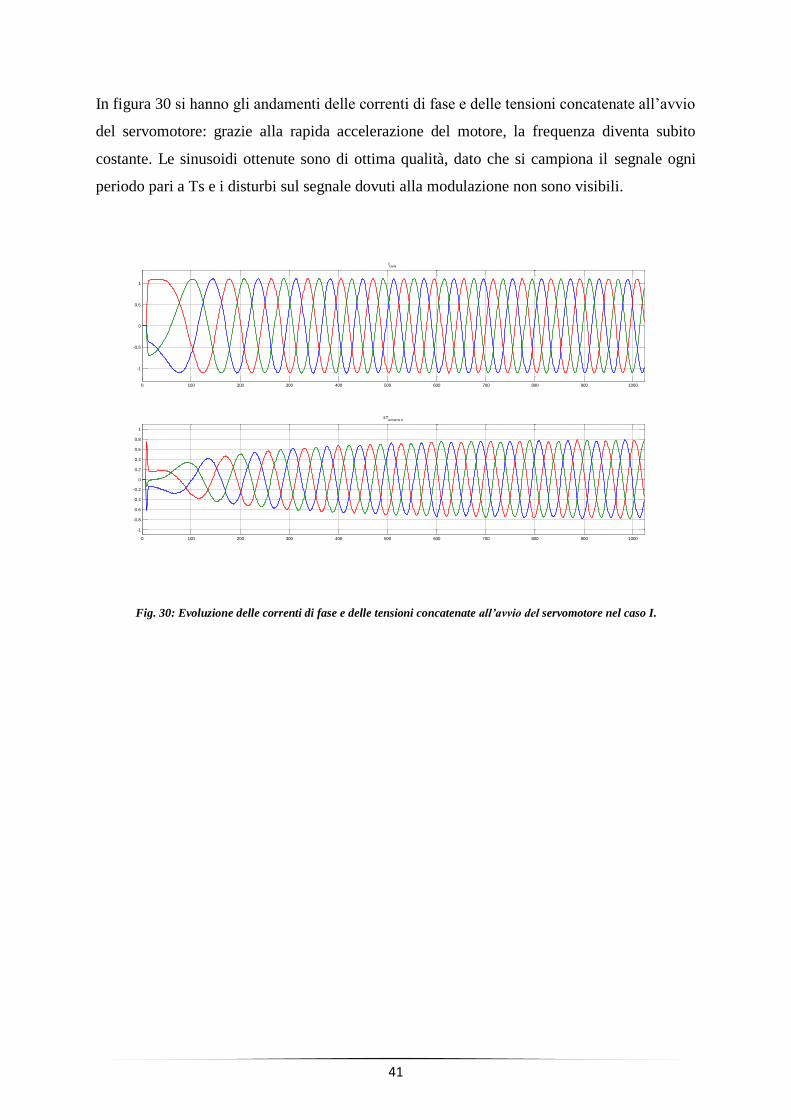
In figura 30 si hanno gli andamenti delle correnti di fase e delle tensioni concatenate all’avvio
del servomotore: grazie alla rapida accelerazione del motore, la frequenza diventa subito
costante. Le sinusoidi ottenute sono di ottima qualità, dato che si campiona il segnale ogni
periodo pari a Ts e i disturbi sul segnale dovuti alla modulazione non sono visibili.
Fig. 30: Evoluzione delle correnti di fase e delle tensioni concatenate all’avvio del servomotore nel caso I.
42
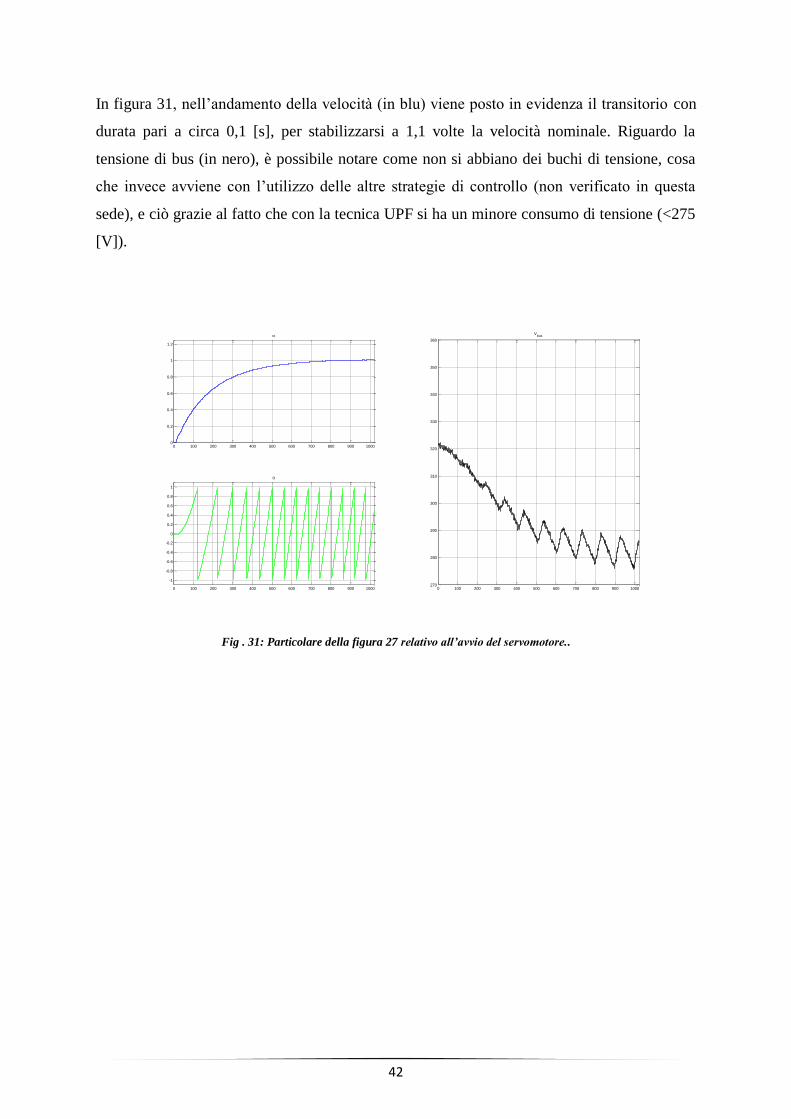
In figura 31, nell’andamento della velocità (in blu) viene posto in evidenza il transitorio con
durata pari a circa 0,1 [s], per stabilizzarsi a 1,1 volte la velocità nominale. Riguardo la
tensione di bus (in nero), è possibile notare come non si abbiano dei buchi di tensione, cosa
che invece avviene con l’utilizzo delle altre strategie di controllo (non verificato in questa
sede), e ciò grazie al fatto che con la tecnica UPF si ha un minore consumo di tensione (<275
[V]).
Fig . 31: Particolare della figura 27 relativo all’avvio del servomotore..
0 100 200 300 400 500 600 700 800 900 10000
0.2
0.4
0.6
0.8
1
1.2
0 100 200 300 400 500 600 700 800 900 1000
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0 100 200 300 400 500 600 700 800 900 1000270
280
290
300
310
320
330
340
350
360
Vbus
43
1.54 1.55 1.56 1.57 1.58 1.59 1.6 1.61 1.62 1.63
x 104
-1
-0.5
0
0.5
1
Iuvw
1.54 1.55 1.56 1.57 1.58 1.59 1.6 1.61 1.62 1.63
x 104
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Tuvvw w u
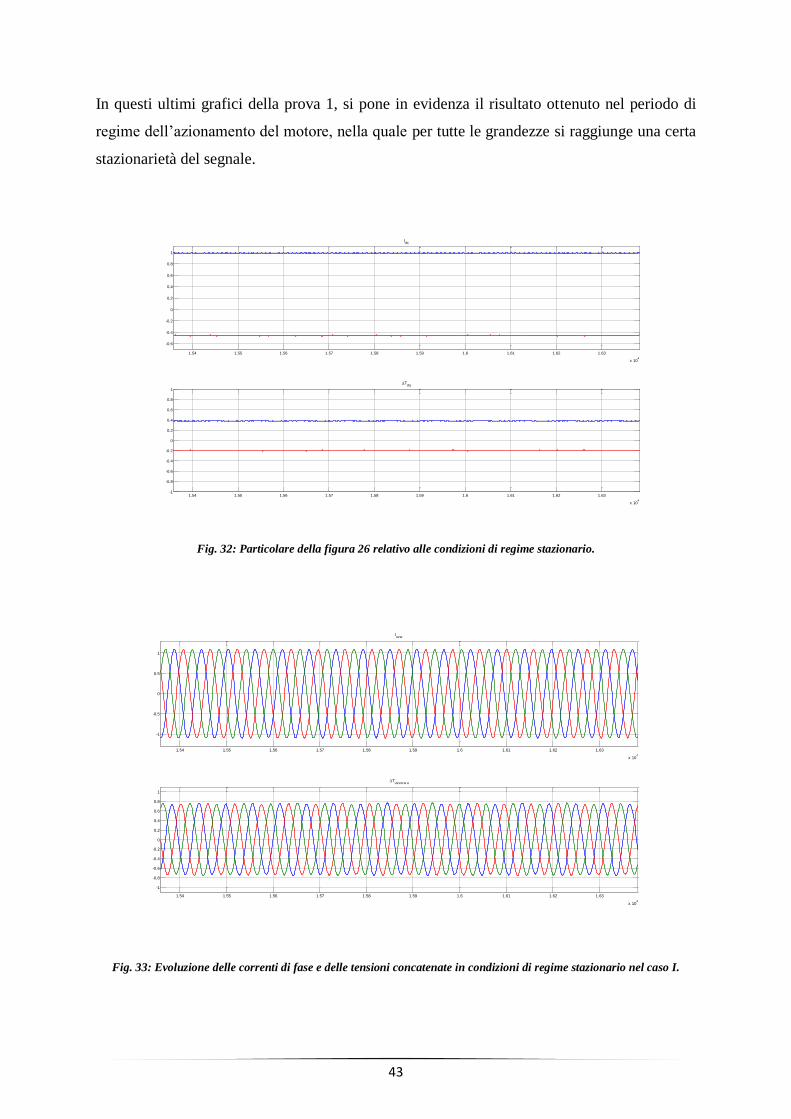
In questi ultimi grafici della prova 1, si pone in evidenza il risultato ottenuto nel periodo di
regime dell’azionamento del motore, nella quale per tutte le grandezze si raggiunge una certa
stazionarietà del segnale.
Fig. 32: Particolare della figura 26 relativo alle condizioni di regime stazionario.
Fig. 33: Evoluzione delle correnti di fase e delle tensioni concatenate in condizioni di regime stazionario nel caso I.
1.54 1.55 1.56 1.57 1.58 1.59 1.6 1.61 1.62 1.63
x 104
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Idq
1.54 1.55 1.56 1.57 1.58 1.59 1.6 1.61 1.62 1.63
x 104
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Tdq
44
1.54 1.55 1.56 1.57 1.58 1.59 1.6 1.61 1.62 1.63
x 104
0
0.2
0.4
0.6
0.8
1
1.2
1.54 1.55 1.56 1.57 1.58 1.59 1.6 1.61 1.62 1.63
x 104
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.54 1.55 1.56 1.57 1.58 1.59 1.6 1.61 1.62 1.63
x 104
270
280
290
300
310
320
330
340
350
360
Vbus
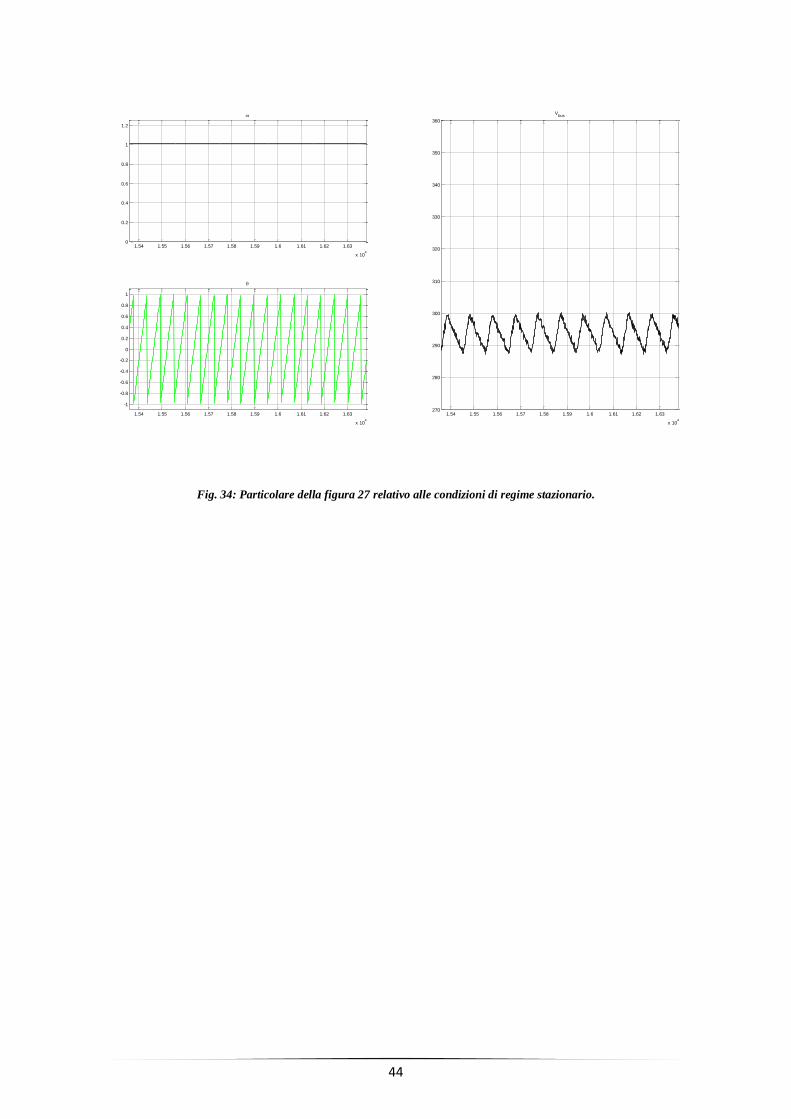
Fig. 34: Particolare della figura 27 relativo alle condizioni di regime stazionario.
45
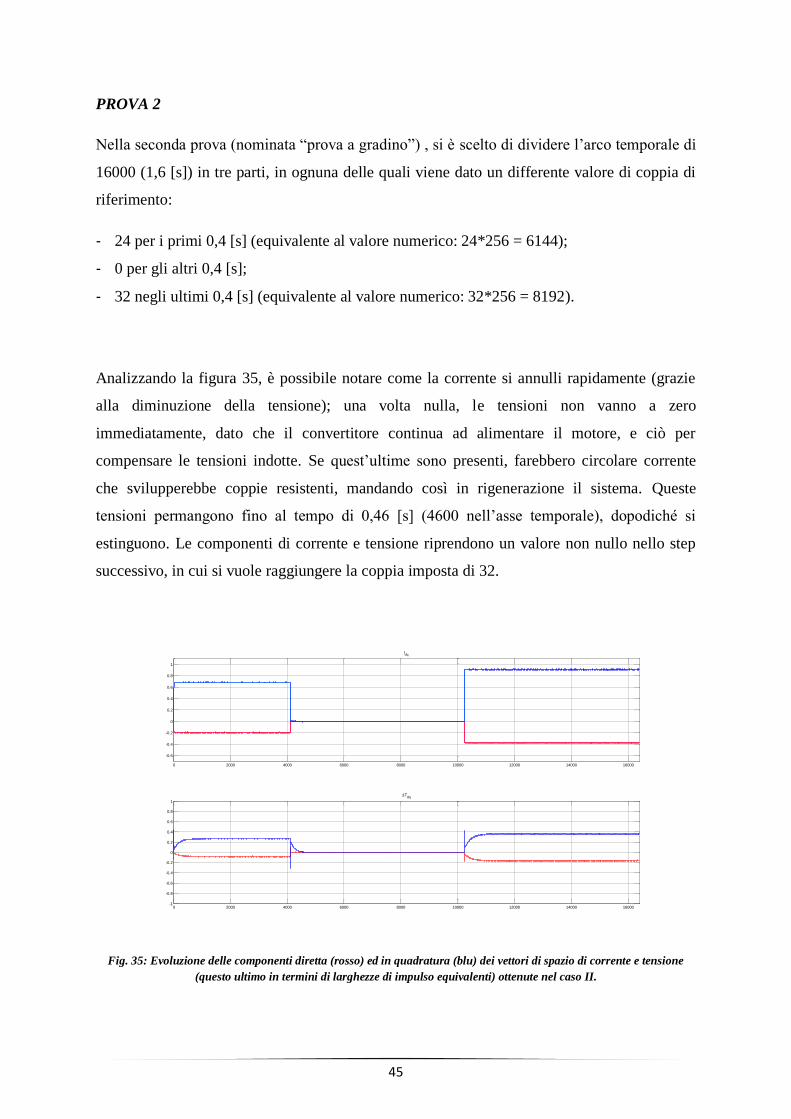
PROVA 2
Nella seconda prova (nominata “prova a gradino”) , si è scelto di dividere l’arco temporale di
16000 (1,6 [s]) in tre parti, in ognuna delle quali viene dato un differente valore di coppia di
riferimento:
- 24 per i primi 0,4 [s] (equivalente al valore numerico: 24*256 = 6144);
- 0 per gli altri 0,4 [s];
- 32 negli ultimi 0,4 [s] (equivalente al valore numerico: 32*256 = 8192).
Analizzando la figura 35, è possibile notare come la corrente si annulli rapidamente (grazie
alla diminuzione della tensione); una volta nulla, le tensioni non vanno a zero
immediatamente, dato che il convertitore continua ad alimentare il motore, e ciò per
compensare le tensioni indotte. Se quest’ultime sono presenti, farebbero circolare corrente
che svilupperebbe coppie resistenti, mandando così in rigenerazione il sistema. Queste
tensioni permangono fino al tempo di 0,46 [s] (4600 nell’asse temporale), dopodiché si
estinguono. Le componenti di corrente e tensione riprendono un valore non nullo nello step
successivo, in cui si vuole raggiungere la coppia imposta di 32.
Fig. 35: Evoluzione delle componenti diretta (rosso) ed in quadratura (blu) dei vettori di spazio di corrente e tensione
(questo ultimo in termini di larghezze di impulso equivalenti) ottenute nel caso II.
0 2000 4000 6000 8000 10000 12000 14000 16000
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Idq
0 2000 4000 6000 8000 10000 12000 14000 16000-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Tdq
46
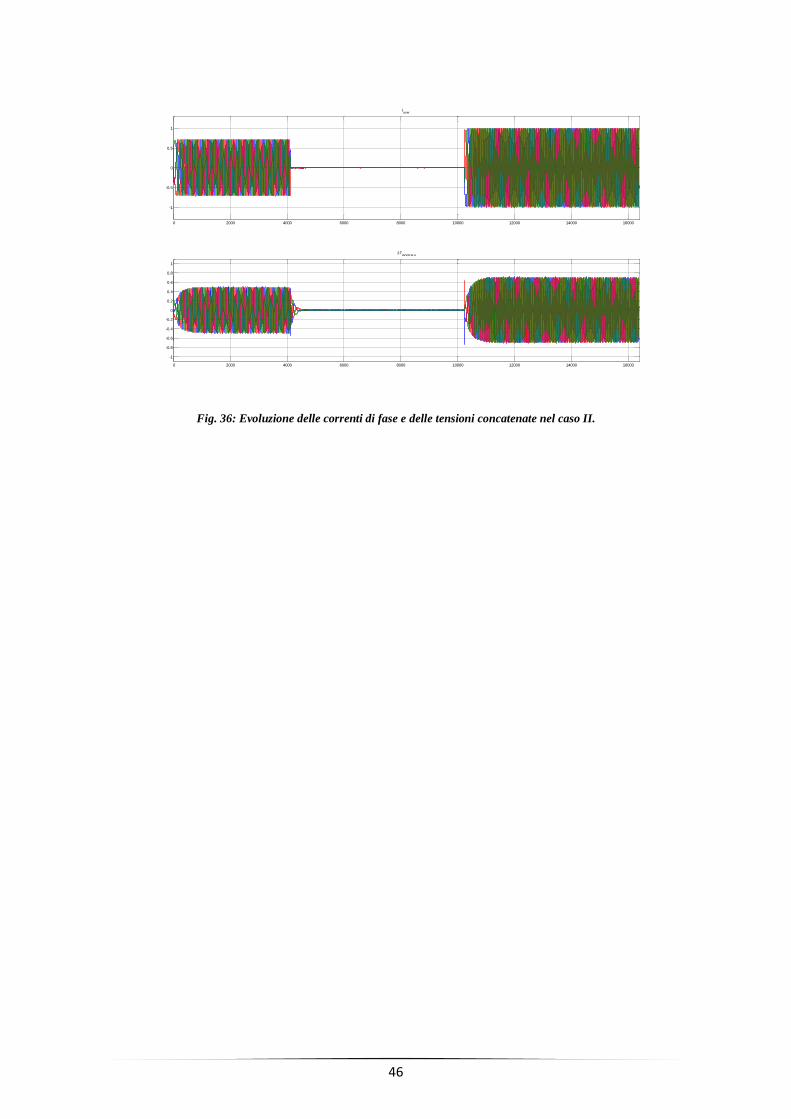
Fig. 36: Evoluzione delle correnti di fase e delle tensioni concatenate nel caso II.
0 2000 4000 6000 8000 10000 12000 14000 16000
-1
-0.5
0
0.5
1
Iuvw
0 2000 4000 6000 8000 10000 12000 14000 16000
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Tuvvw w u
47
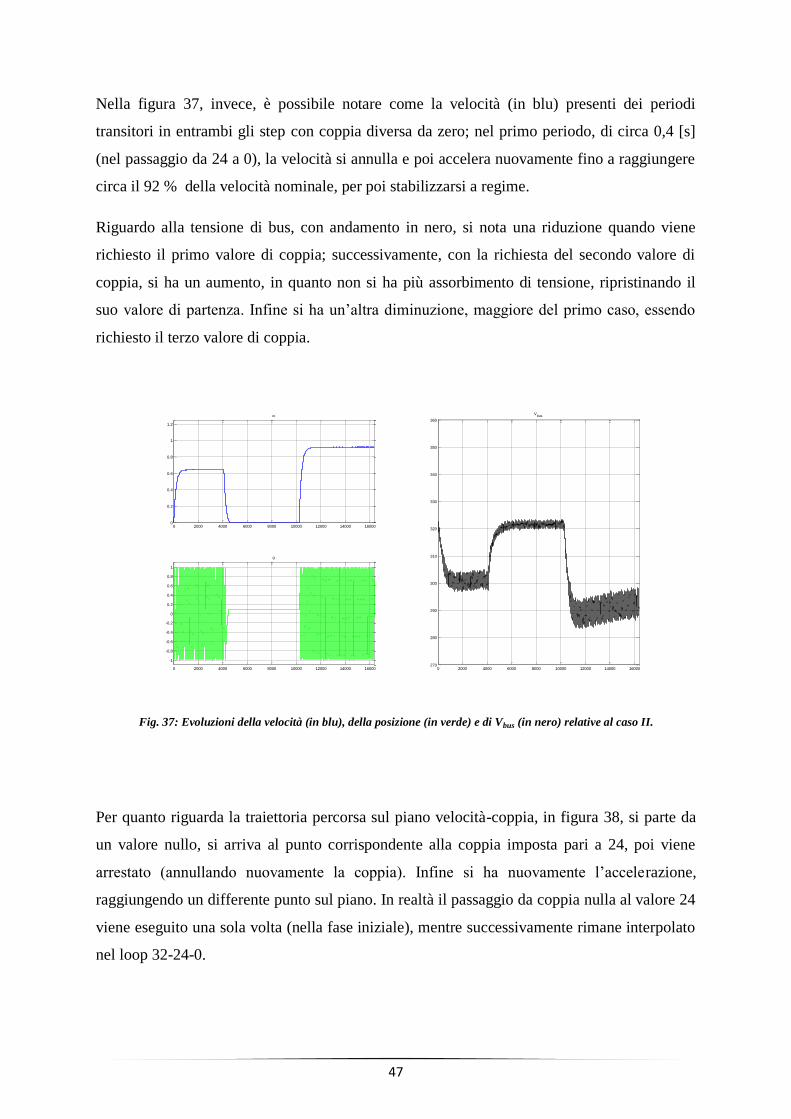
Nella figura 37, invece, è possibile notare come la velocità (in blu) presenti dei periodi
transitori in entrambi gli step con coppia diversa da zero; nel primo periodo, di circa 0,4 [s]
(nel passaggio da 24 a 0), la velocità si annulla e poi accelera nuovamente fino a raggiungere
circa il 92 % della velocità nominale, per poi stabilizzarsi a regime.
Riguardo alla tensione di bus, con andamento in nero, si nota una riduzione quando viene
richiesto il primo valore di coppia; successivamente, con la richiesta del secondo valore di
coppia, si ha un aumento, in quanto non si ha più assorbimento di tensione, ripristinando il
suo valore di partenza. Infine si ha un’altra diminuzione, maggiore del primo caso, essendo
richiesto il terzo valore di coppia.
Fig. 37: Evoluzioni della velocità (in blu), della posizione (in verde) e di Vbus (in nero) relative al caso II.
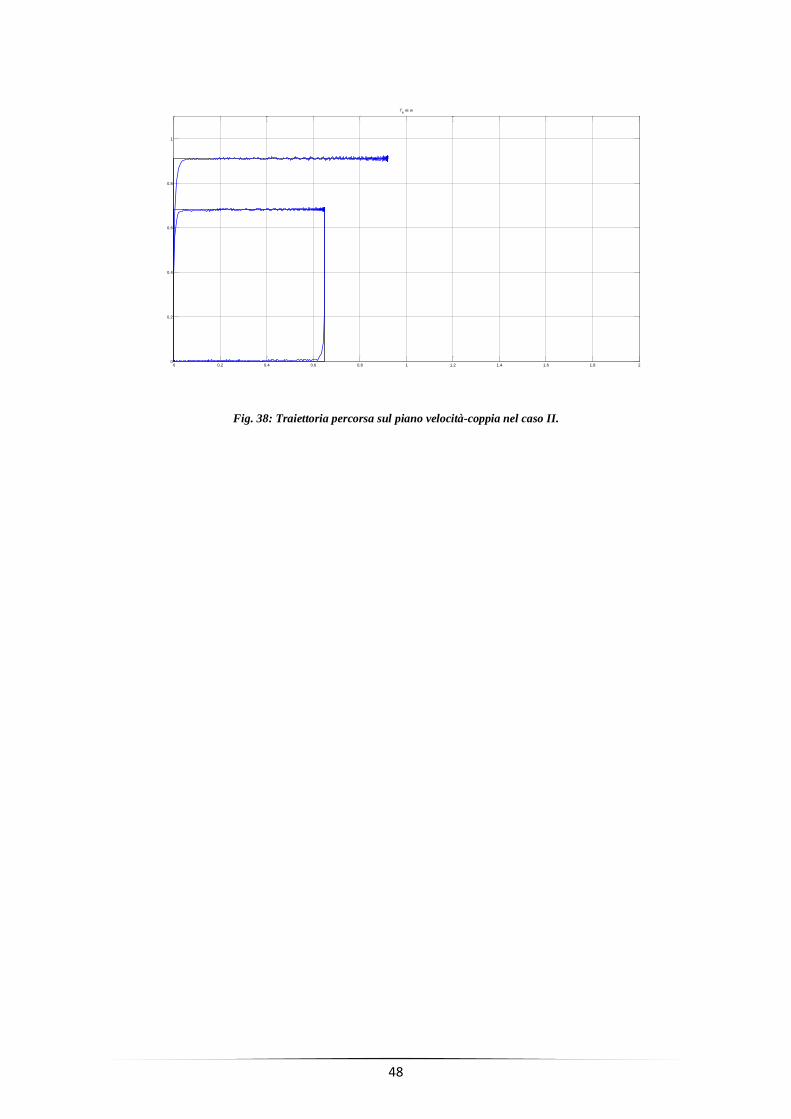
Per quanto riguarda la traiettoria percorsa sul piano velocità-coppia, in figura 38, si parte da
un valore nullo, si arriva al punto corrispondente alla coppia imposta pari a 24, poi viene
arrestato (annullando nuovamente la coppia). Infine si ha nuovamente l’accelerazione,
raggiungendo un differente punto sul piano. In realtà il passaggio da coppia nulla al valore 24
viene eseguito una sola volta (nella fase iniziale), mentre successivamente rimane interpolato
nel loop 32-24-0.
0 2000 4000 6000 8000 10000 12000 14000 160000
0.2
0.4
0.6
0.8
1
1.2
0 2000 4000 6000 8000 10000 12000 14000 16000
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0 2000 4000 6000 8000 10000 12000 14000 16000270
280
290
300
310
320
330
340
350
360
Vbus
48
Fig. 38: Traiettoria percorsa sul piano velocità-coppia nel caso II.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.2
0.4
0.6
0.8
1
Te vs w
49
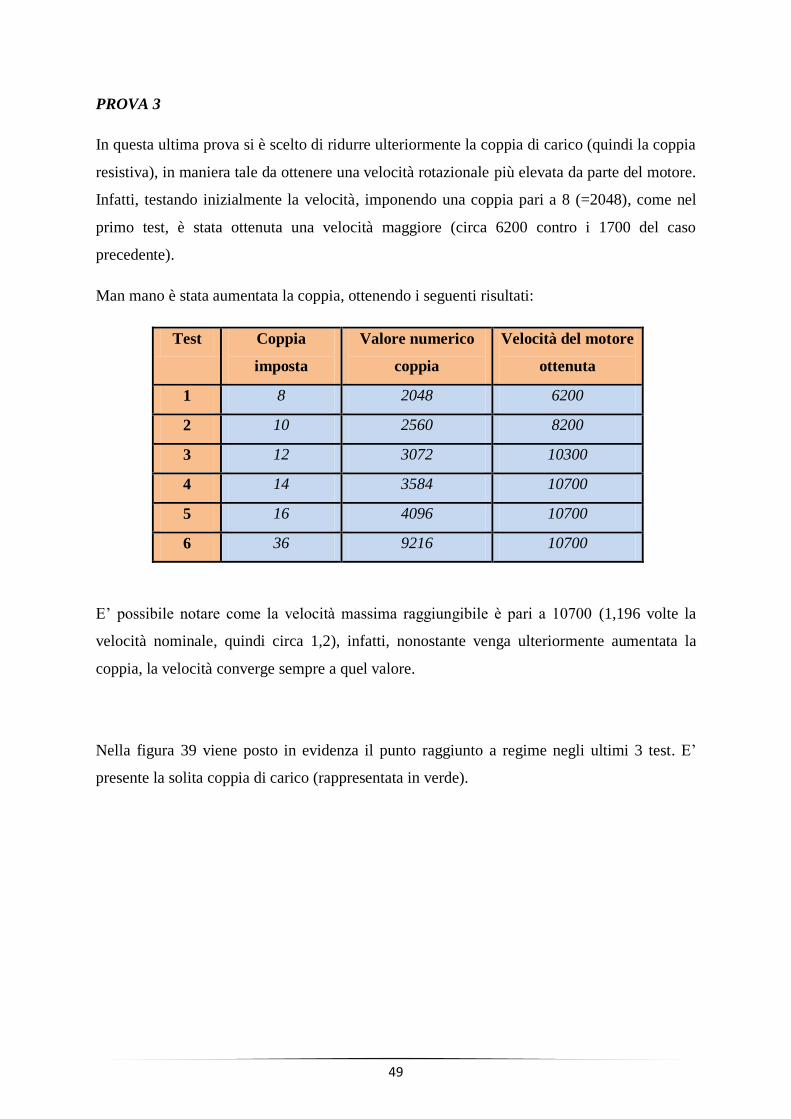
PROVA 3
In questa ultima prova si è scelto di ridurre ulteriormente la coppia di carico (quindi la coppia
resistiva), in maniera tale da ottenere una velocità rotazionale più elevata da parte del motore.
Infatti, testando inizialmente la velocità, imponendo una coppia pari a 8 (=2048), come nel
primo test, è stata ottenuta una velocità maggiore (circa 6200 contro i 1700 del caso
precedente).
Man mano è stata aumentata la coppia, ottenendo i seguenti risultati:
Test Coppia
imposta
Valore numerico
coppia
Velocità del motore
ottenuta
1 8 2048 6200
2 10 2560 8200
3 12 3072 10300
4 14 3584 10700
5 16 4096 10700
6 36 9216 10700
E’ possibile notare come la velocità massima raggiungibile è pari a 10700 (1,196 volte la
velocità nominale, quindi circa 1,2), infatti, nonostante venga ulteriormente aumentata la
coppia, la velocità converge sempre a quel valore.
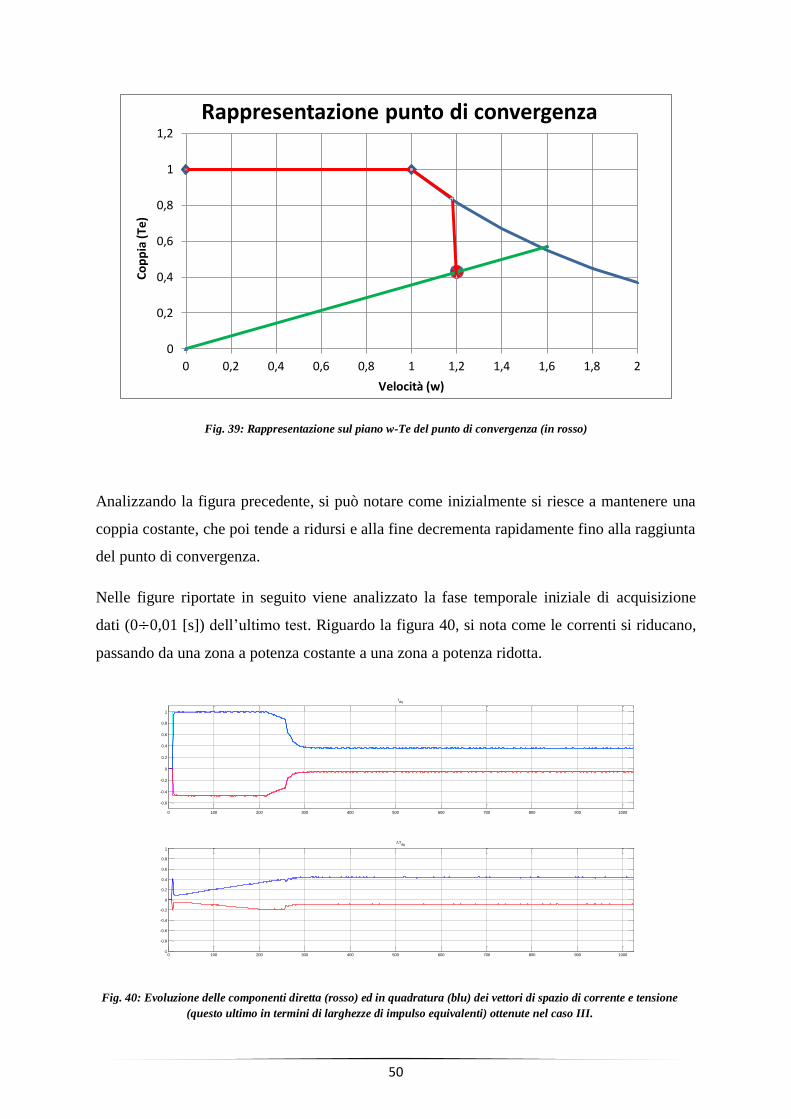
Nella figura 39 viene posto in evidenza il punto raggiunto a regime negli ultimi 3 test. E’
presente la solita coppia di carico (rappresentata in verde).
50
0 100 200 300 400 500 600 700 800 900 1000
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Idq
0 100 200 300 400 500 600 700 800 900 1000-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Tdq
Fig. 39: Rappresentazione sul piano w-Te del punto di convergenza (in rosso)
Analizzando la figura precedente, si può notare come inizialmente si riesce a mantenere una
coppia costante, che poi tende a ridursi e alla fine decrementa rapidamente fino alla raggiunta
del punto di convergenza.
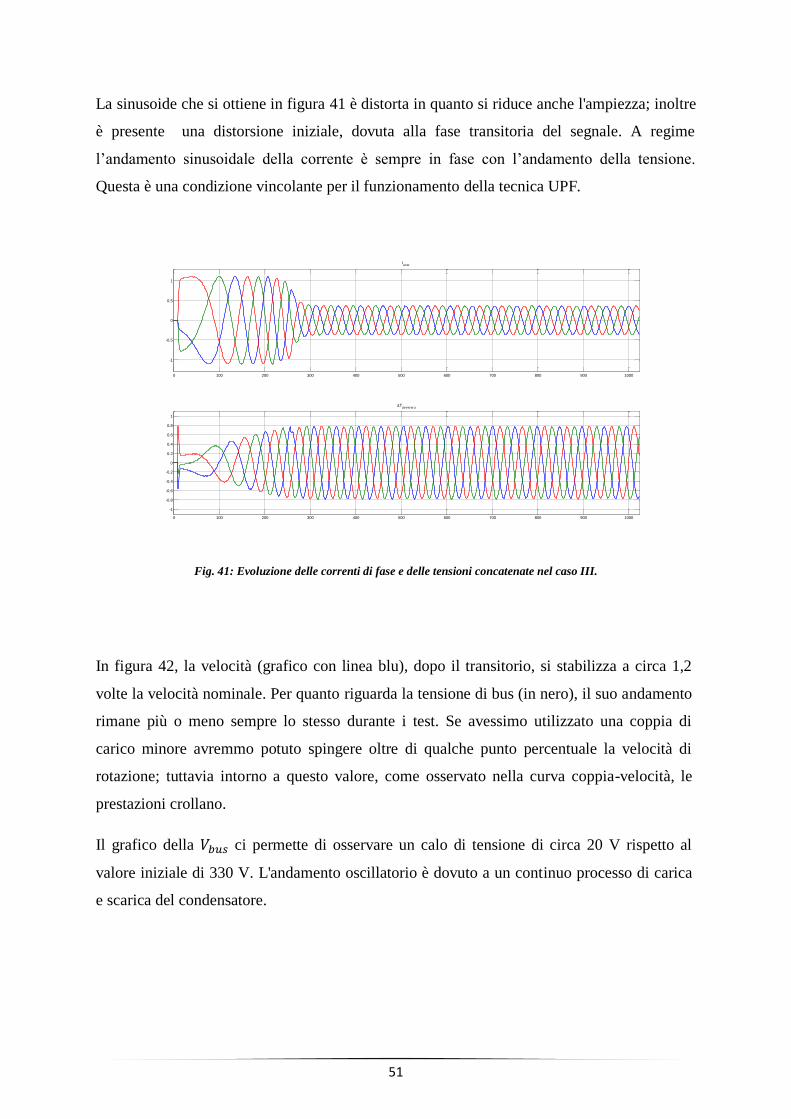
Nelle figure riportate in seguito viene analizzato la fase temporale iniziale di acquisizione
dati (0 0,01 [s]) dell’ultimo test. Riguardo la figura 40, si nota come le correnti si riducano,
passando da una zona a potenza costante a una zona a potenza ridotta.
0
0,2
0,4
0,6
0,8
1
1,2
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2
Co
pp
ia (
Te)
Velocità (w)
Rappresentazione punto di convergenza
Fig. 40: Evoluzione delle componenti diretta (rosso) ed in quadratura (blu) dei vettori di spazio di corrente e tensione
(questo ultimo in termini di larghezze di impulso equivalenti) ottenute nel caso III.
51
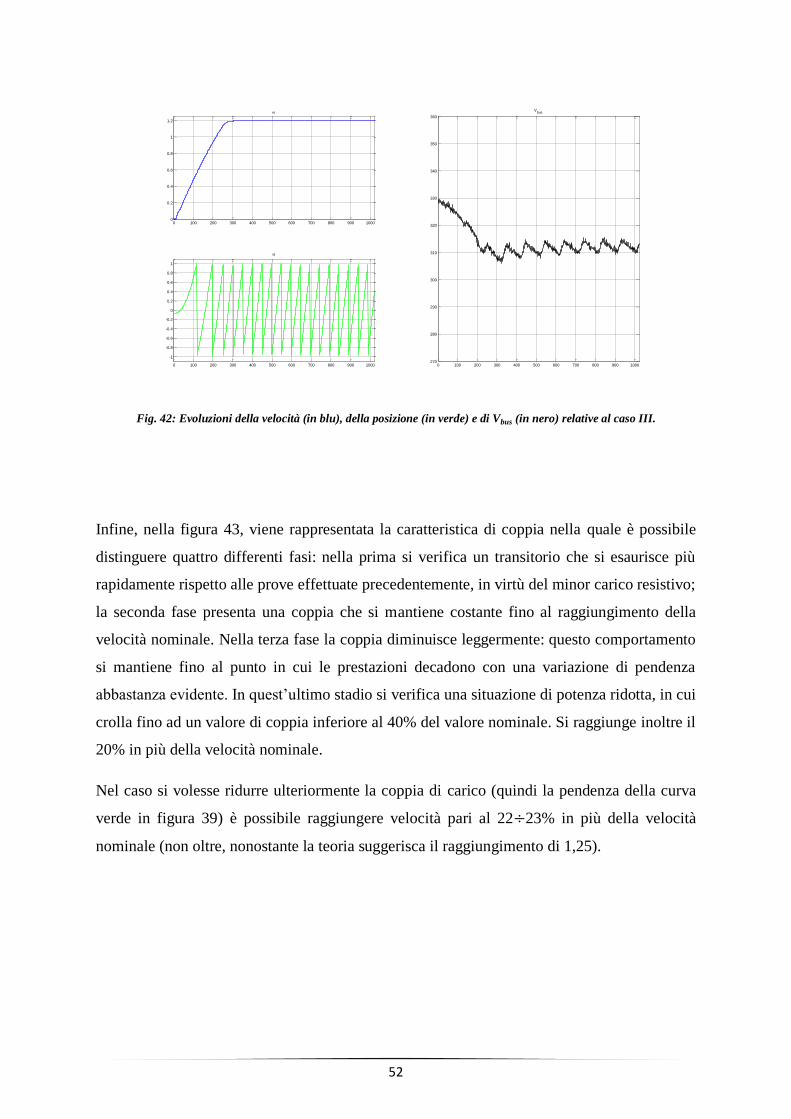
La sinusoide che si ottiene in figura 41 è distorta in quanto si riduce anche l'ampiezza; inoltre
è presente una distorsione iniziale, dovuta alla fase transitoria del segnale. A regime
l’andamento sinusoidale della corrente è sempre in fase con l’andamento della tensione.
Questa è una condizione vincolante per il funzionamento della tecnica UPF.
Fig. 41: Evoluzione delle correnti di fase e delle tensioni concatenate nel caso III.
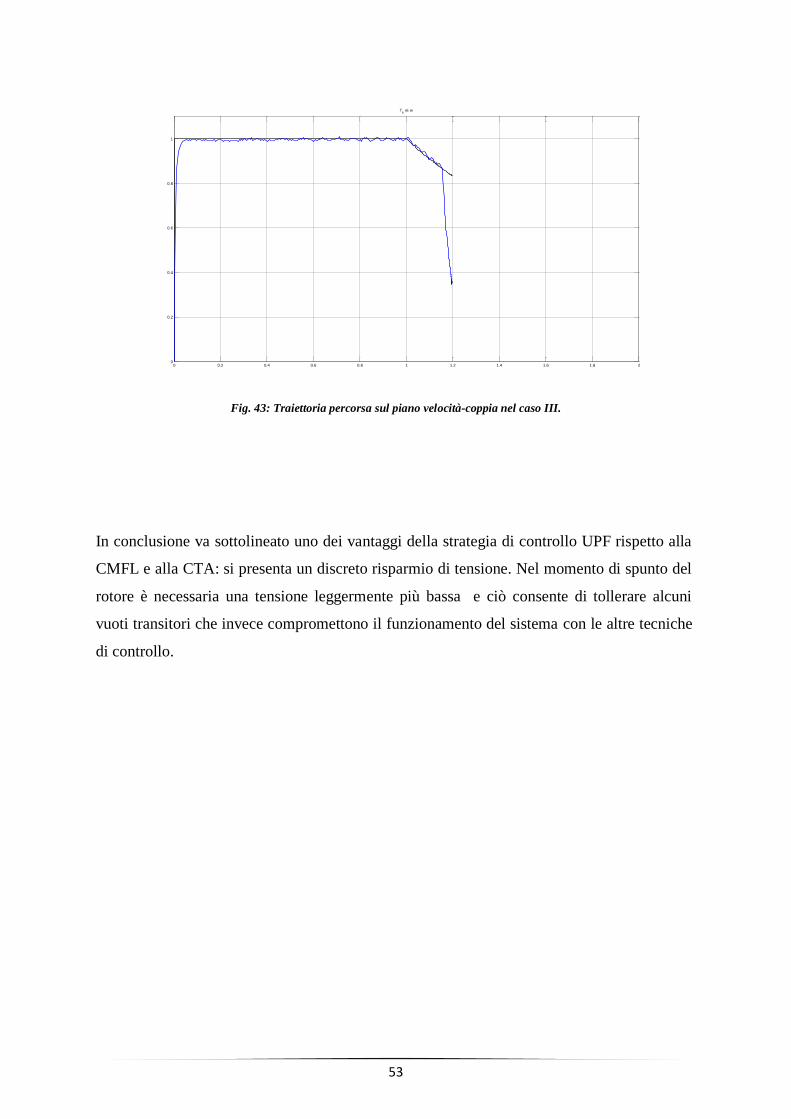
In figura 42, la velocità (grafico con linea blu), dopo il transitorio, si stabilizza a circa 1,2
volte la velocità nominale. Per quanto riguarda la tensione di bus (in nero), il suo andamento
rimane più o meno sempre lo stesso durante i test. Se avessimo utilizzato una coppia di
carico minore avremmo potuto spingere oltre di qualche punto percentuale la velocità di
rotazione; tuttavia intorno a questo valore, come osservato nella curva coppia-velocità, le
prestazioni crollano.
Il grafico della ci permette di osservare un calo di tensione di circa 20 V rispetto al
valore iniziale di 330 V. L'andamento oscillatorio è dovuto a un continuo processo di carica
e scarica del condensatore.
0 100 200 300 400 500 600 700 800 900 1000
-1
-0.5
0
0.5
1
Iuvw
0 100 200 300 400 500 600 700 800 900 1000
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Tuvvw w u
52
Fig. 42: Evoluzioni della velocità (in blu), della posizione (in verde) e di Vbus (in nero) relative al caso III.
Infine, nella figura 43, viene rappresentata la caratteristica di coppia nella quale è possibile
distinguere quattro differenti fasi: nella prima si verifica un transitorio che si esaurisce più
rapidamente rispetto alle prove effettuate precedentemente, in virtù del minor carico resistivo;
la seconda fase presenta una coppia che si mantiene costante fino al raggiungimento della
velocità nominale. Nella terza fase la coppia diminuisce leggermente: questo comportamento
si mantiene fino al punto in cui le prestazioni decadono con una variazione di pendenza
abbastanza evidente. In quest’ultimo stadio si verifica una situazione di potenza ridotta, in cui
crolla fino ad un valore di coppia inferiore al 40% del valore nominale. Si raggiunge inoltre il
20% in più della velocità nominale.
Nel caso si volesse ridurre ulteriormente la coppia di carico (quindi la pendenza della curva
verde in figura 39) è possibile raggiungere velocità pari al 22 23% in più della velocità
nominale (non oltre, nonostante la teoria suggerisca il raggiungimento di 1,25).
0 100 200 300 400 500 600 700 800 900 10000
0.2
0.4
0.6
0.8
1
1.2
0 100 200 300 400 500 600 700 800 900 1000
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0 100 200 300 400 500 600 700 800 900 1000270
280
290
300
310
320
330
340
350
360
Vbus
53
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.2
0.4
0.6
0.8
1
Te vs w
In conclusione va sottolineato uno dei vantaggi della strategia di controllo UPF rispetto alla
CMFL e alla CTA: si presenta un discreto risparmio di tensione. Nel momento di spunto del
rotore è necessaria una tensione leggermente più bassa e ciò consente di tollerare alcuni
vuoti transitori che invece compromettono il funzionamento del sistema con le altre tecniche
di controllo.
Fig. 43: Traiettoria percorsa sul piano velocità-coppia nel caso III.













![Norme di prodotto per azionamenti elettrici a velocità variabile [PDS] Standard internazionali, Norme europee, Norme italiane, Direttive Europee, Standard](https://img.pdfslide.tips/doc/110x75/5542eb76497959361e8dfc5c/norme-di-prodotto-per-azionamenti-elettrici-a-velocita-variabile-pds-standard-internazionali-norme-europee-norme-italiane-direttive-europee-standard.jpg)














