Embed Size (px)
Citation preview
Roboguide V6.40
Руководство
1
© Copyright ООО ФАНУК Роботикс Россия
Копирование, тиражирование или передача третьим лицам настоящей документации даже в сокращенном виде разрешается только с явно выраженного согласия издателя.
Система управления может обладать другими функциями, не описанными в настоящем документе. Однако при новой поставке заказчик не имеет право требовать наличия этих функций.
Содержание настоящей брошюры было проверено нами на соответствие описанному аппаратному и программному обеспечению.
Тем не менее, нельзя исключить наличия отклонений, в связи с чем, мы не гарантируем полное соответствие. Однако данные, приведенные в настоящей брошюре, регулярно проверяются, и в последующие издания вносятся необходимые коррективы.
Право на внесение технических изменений, не влияющих на работу устройства, сохраняется. Авторы оригинальной версии: Вернер Шолленбергер (Werner Schollenberger). Адаптация: Острецов Илья
2
Содержание
Содержание ................................................................................................... 2
Системные требования ............................................................................... 4
Установка ....................................................................................................... 4
Регистрация продукта ................................................................................. 5Шаг 1 .............................................................................................................................................. 5Шаг 2 .............................................................................................................................................. 6
Перенос лицензий ........................................................................................ 7Описание........................................................................................................................................ 7Алгоритм ........................................................................................................................................ 7
Структура папок проекта ............................................................................ 9
Создание новой ячейки ............................................................................. 10
Команды мыши ........................................................................................... 15
Перемещение объектов и рабочей точки робота (TCP) ...................... 16
Добавление инструмента ......................................................................... 17Вариант 1 ..................................................................................................................................... 18Вариант 2 ..................................................................................................................................... 23Создание инструмента ............................................................................................................... 24
Добавление фиксирующего устройства (Fixture) ................................. 27Описание...................................................................................................................................... 27Добавление.................................................................................................................................. 28
Добавление препятствий .......................................................................... 30Описание...................................................................................................................................... 30Добавление ограждения ............................................................................................................. 31
Обзор созданной ячейки ........................................................................... 32
Добавление/удаление линий положения объекта ............................... 33
Изменение фона ......................................................................................... 34
Описание кнопок управления .................................................................. 35
Меню управления воспроизведением (Run Panel) .............................. 37
Проверка досягаемости командой мыши (Вариант 1) ....................... 39
Проверка досягаемости командой мыши (Вариант 2) ....................... 40
Проверка досягаемости (Вариант 3) ....................................................... 41
Создание пользовательской системы координат (User Frame) ........ 42
Пульт управления Teach Pendant ............................................................ 43
Создание программы с помощью пульта управления ....................... 44
Создание программы в окне навигации ................................................ 45Создание программы моделирования (Simulation program) ... 45
Запуск программ ........................................................................................ 46Запуск программ с пульта управления ....................................... Error! Bookmark not defined.Запуск программ из меню управления воспроизведением (Run Panel) ................................ 47
3
Запись видео в формате AVI ..................................................................................................... 47
Измерения ................................................................................................... 48Запись размеров ......................................................................................................................... 49Задание точек измерения .......................................................................................................... 49Определение и изменение расстояния между двумя объектами .......................................... 50Создание размерных линий ....................................................................................................... 51
Добавление детали .................................................................................... 52Добавление детали ..................................................................................................................... 52Перемещение детали ................................................................................................................. 53Изменение свойств детали ........................................................................................................ 53Привязка детали к устройству позиционирования (Fixture) .................................................... 54Подготовка детали к симуляции захвата и укладки ................................................................. 55Создание программы моделирования захвата и укладки ....................................................... 59Создание программы моделирования захвата ........................................................................ 62Завершение создания программы............................................................................................. 66Другие способы создания программы моделирования ........................................................... 67
Подвижное оборудование (Machines) .................................................... 68Описание...................................................................................................................................... 68Создание подвижного оборудования, управляемого цифровыми выходами (DO) .............. 69Создание подвижного оборудования с сервоприводом .......................................................... 72
Замена робота в существующей ячейке ................................................ 79
Добавление второго робота ..................................................................... 80
Автоматическое генерирование траектории ......................................... 81Описание...................................................................................................................................... 81Алгоритм генерирования траектории, привязанной к грани ................................................... 82Изменение точек подхода и отхода .......................................................................................... 83Другие настройки элемента Feature .......................................................................................... 84Деление на сегменты .................................................................................................................. 87
Заданные позиции (Target points) ........................................................... 88Задание позиций как точек в пространстве .............................................................................. 88Создание групп заданных позиций ............................................................................................ 89Описание...................................................................................................................................... 92
Алгоритм .................................................................................................................................. 92
Создание динамического инструмента .................................................. 93Описание...................................................................................................................................... 93Алгоритм ...................................................................................................................................... 93
4
Системные требования
Windows XP 1024 MB RAM Pentium 4 > 3.0 GHz Nvidia Quadro 4 или Nvidia Quadro FX
Установка
1. Запустите установку License Checker. 2. Запустите установку SimPro. 3. Последовательно выполните установку выбранных опций.
После установки вы можете использовать Roboguide и его опции в течении 30 дней. По истечении данного срока, вам необходимо зарегистрировать программное обеспечение (см. раздел «Регистрация продукта»).
Замечание: после отправки запроса на регистрацию Roboguide, Вы получите лицензионные ключи в течение недели.
5
Регистрация продукта
Шаг 1
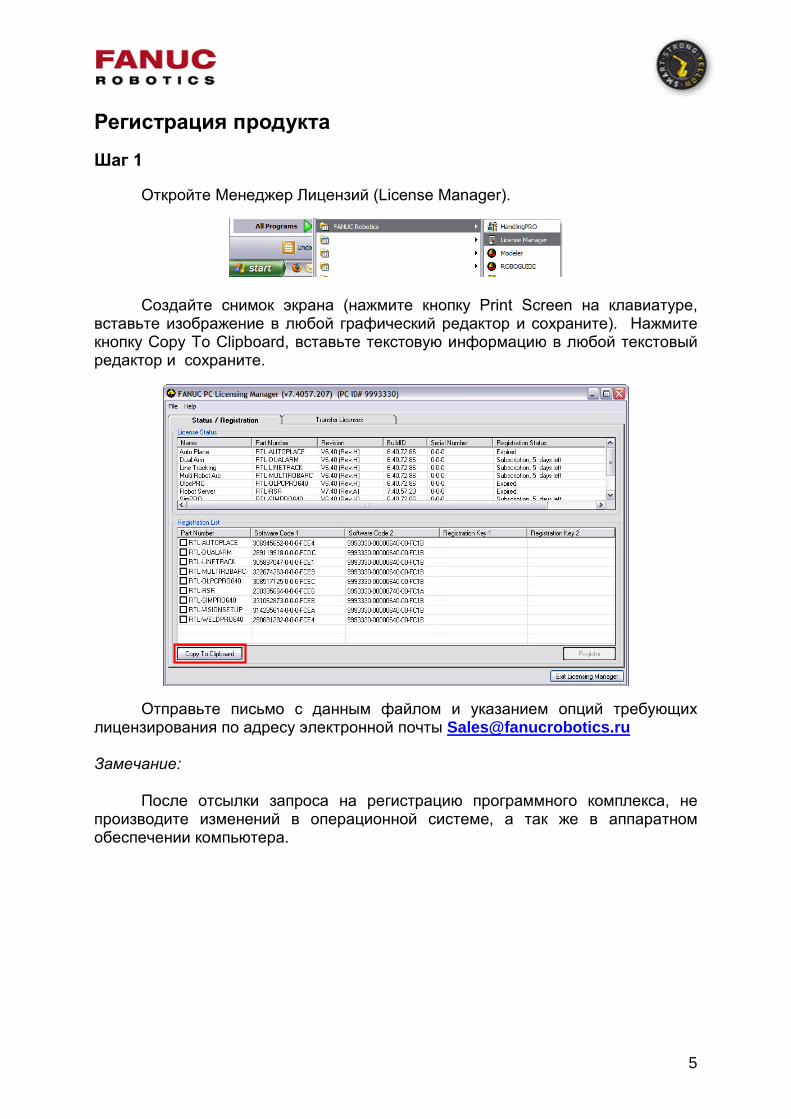
Откройте Менеджер Лицензий (License Manager).
Создайте снимок экрана (нажмите кнопку Print Screen на клавиатуре, вставьте изображение в любой графический редактор и сохраните). Нажмите кнопку Copy To Clipboard, вставьте текстовую информацию в любой текстовый редактор и сохраните.
Отправьте письмо с данным файлом и указанием опций требующих лицензирования по адресу электронной почты [email protected]
Замечание:
После отсылки запроса на регистрацию программного комплекса, не производите изменений в операционной системе, а так же в аппаратном обеспечении компьютера.

6
Шаг 2
После получения от компании FANUC Robotics регистрационной информации, вставьте полученные Registration Key 1 и 2 в соответствующие поля лицензируемой опции:
Откройте Менеджер Лицензий и выберите опцию (поставьте «галочку»).
Скопируйте в соответствующие желтые поля Registration Key 1 и 2 Нажмите кнопку Register
7
Перенос лицензий
Описание
Данная процедура необходима, в случае если Roboguide был успешно установлен и лицензирован на Компьютере 1, но потребовался перенос программного обеспечения и лицензий на Компьютер 2.
Алгоритм
Установите Roboguide на Компьютер 2. Подсоедините к Компьютеру 2 USB флеш-накопитель. Откройте Менеджер Лицензий и выберите вкладку Transfer Licenses. Выберите флеш-накопитель, нажав кнопку Browse. Нажмите кнопку PREPARE.
Теперь USB флеш-накопитель готов к переносу лицензий.
1 2
8
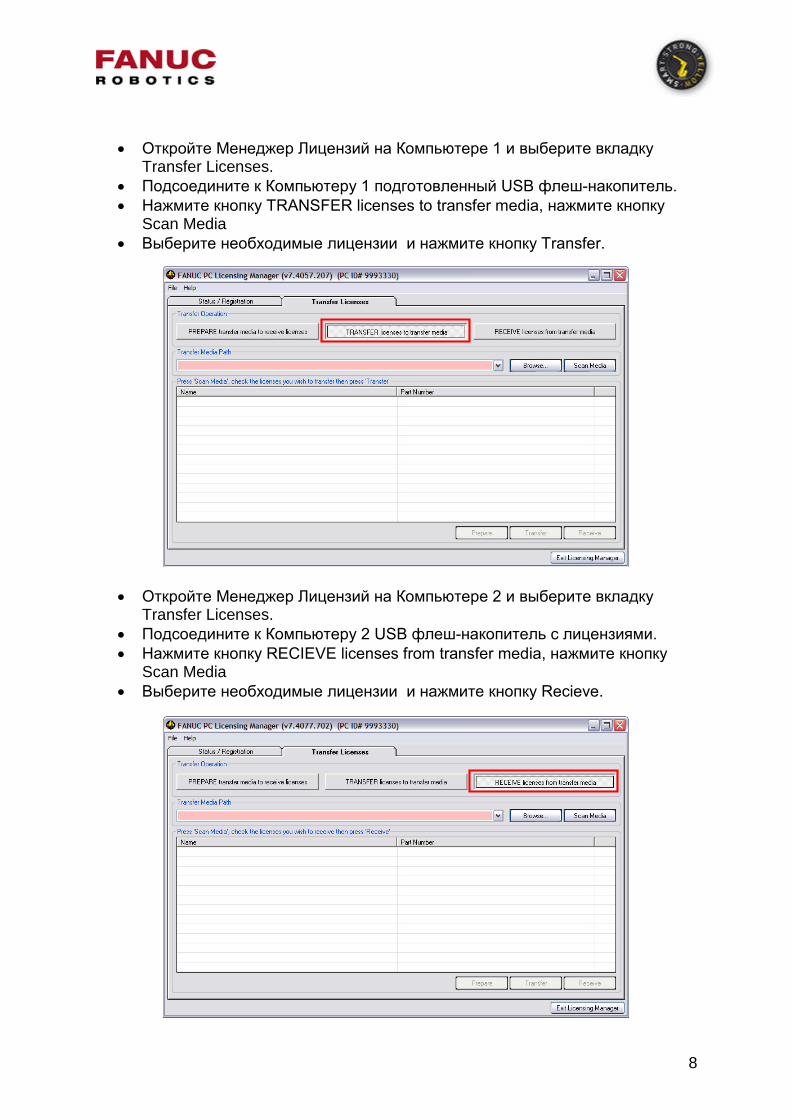
Откройте Менеджер Лицензий на Компьютере 1 и выберите вкладку Transfer Licenses.
Подсоедините к Компьютеру 1 подготовленный USB флеш-накопитель. Нажмите кнопку TRANSFER licenses to transfer media, нажмите кнопку
Scan Media Выберите необходимые лицензии и нажмите кнопку Transfer.
Откройте Менеджер Лицензий на Компьютере 2 и выберите вкладку Transfer Licenses.
Подсоедините к Компьютеру 2 USB флеш-накопитель с лицензиями. Нажмите кнопку RECIEVE licenses from transfer media, нажмите кнопку
Scan Media Выберите необходимые лицензии и нажмите кнопку Recieve.
9
Структура папок проекта
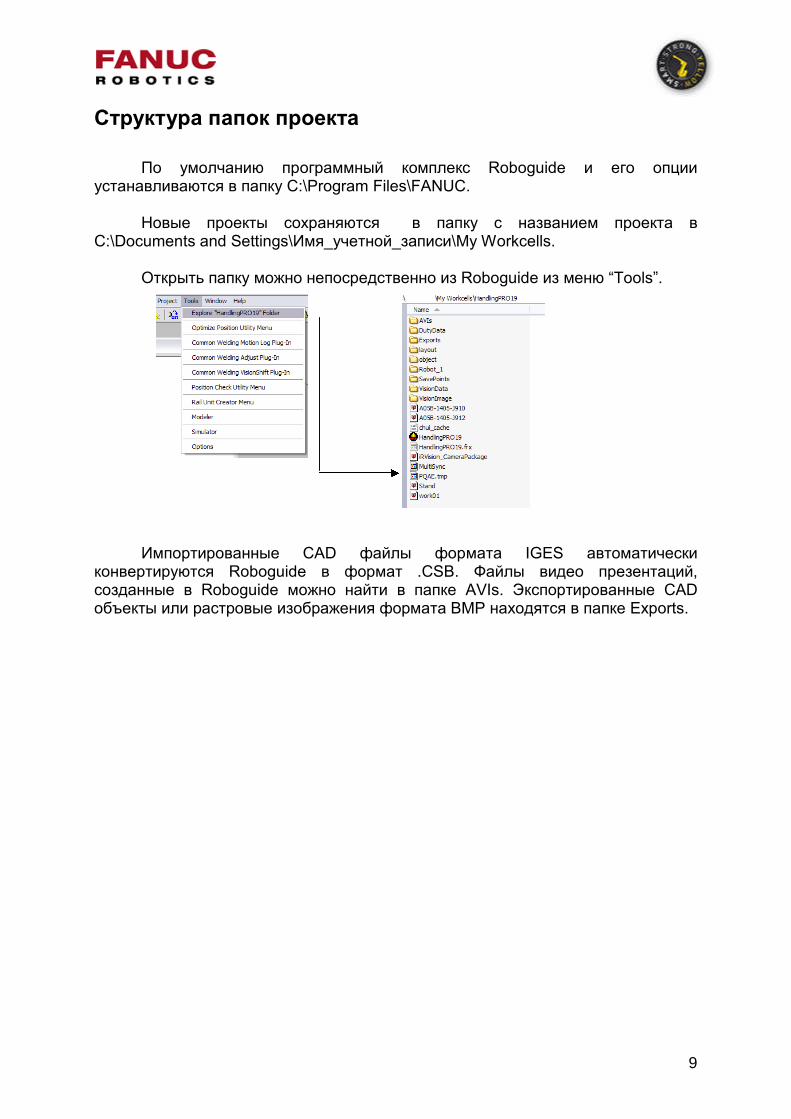
По умолчанию программный комплекс Roboguide и его опции устанавливаются в папку C:\Program Files\FANUC.
Новые проекты сохраняются в папку с названием проекта в C:\Documents and Settings\Имя_учетной_записи\My Workcells.
Открыть папку можно непосредственно из Roboguide из меню “Tools”.
Импортированные CAD файлы формата IGES автоматически конвертируются Roboguide в формат .CSB. Файлы видео презентаций, созданные в Roboguide можно найти в папке AVIs. Экспортированные CAD объекты или растровые изображения формата BMP находятся в папке Exports.
10
Создание новой ячейки
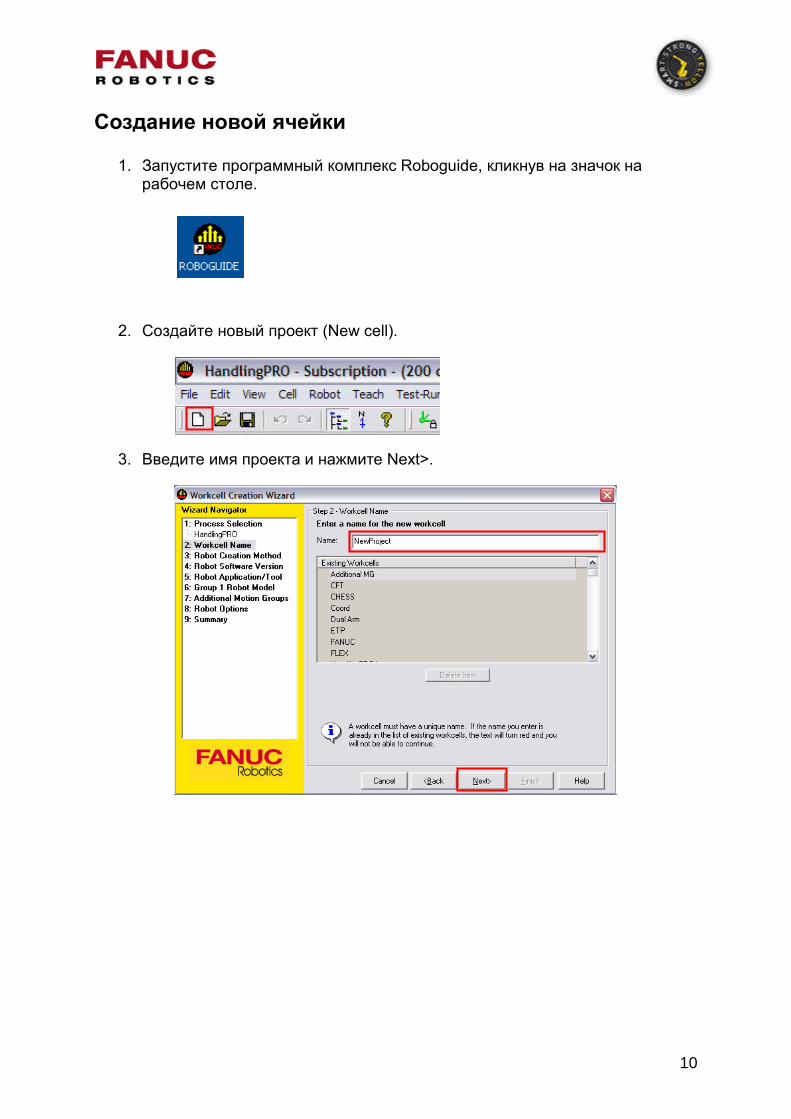
1. Запустите программный комплекс Roboguide, кликнув на значок на рабочем столе.
2. Создайте новый проект (New cell).
3. Введите имя проекта и нажмите Next>.
11
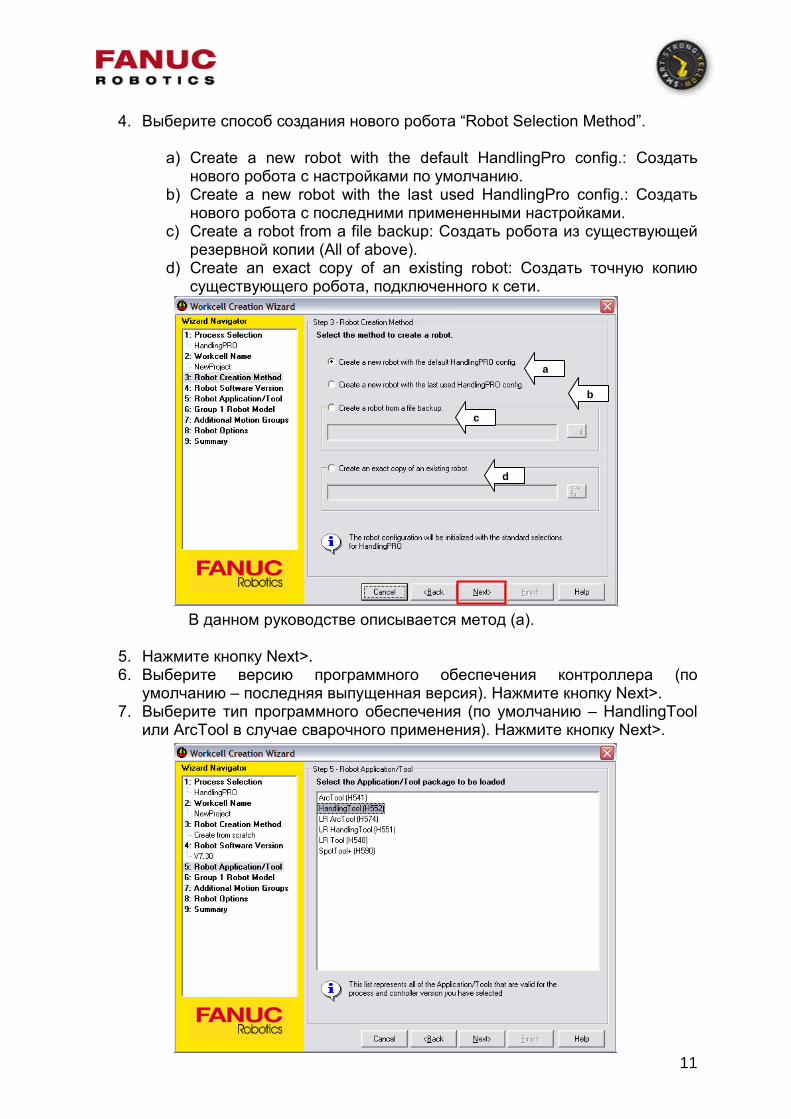
4. Выберите способ создания нового робота “Robot Selection Method”.
a) Create a new robot with the default HandlingPro config.: Создать нового робота с настройками по умолчанию.
b) Create a new robot with the last used HandlingPro config.: Создать нового робота с последними примененными настройками.
c) Create a robot from a file backup: Создать робота из существующей резервной копии (All of above).
d) Create an exact copy of an existing robot: Создать точную копию существующего робота, подключенного к сети.
В данном руководстве описывается метод (а).
5. Нажмите кнопку Next>. 6. Выберите версию программного обеспечения контроллера (по
умолчанию – последняя выпущенная версия). Нажмите кнопку Next>. 7. Выберите тип программного обеспечения (по умолчанию – HandlingTool
или ArcTool в случае сварочного применения). Нажмите кнопку Next>.
a
b
c
d
12
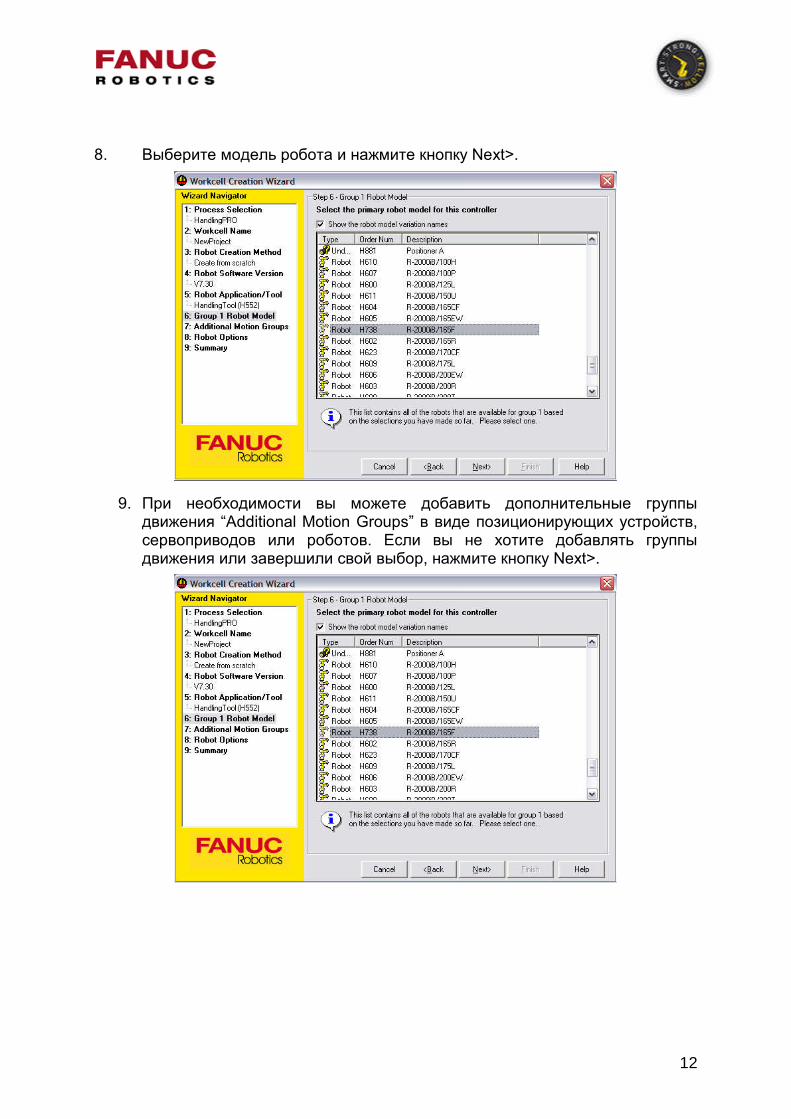
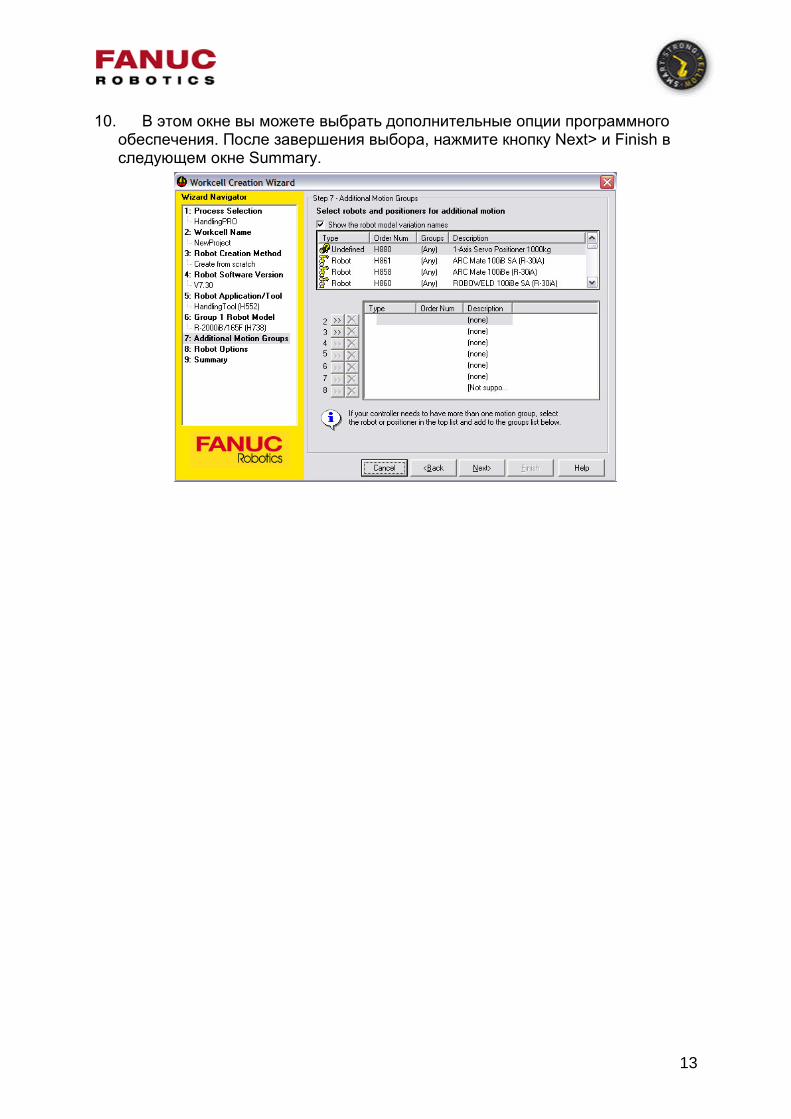
8. Выберите модель робота и нажмите кнопку Next>.
9. При необходимости вы можете добавить дополнительные группы движения “Additional Motion Groups” в виде позиционирующих устройств, сервоприводов или роботов. Если вы не хотите добавлять группы движения или завершили свой выбор, нажмите кнопку Next>.
13
10. В этом окне вы можете выбрать дополнительные опции программного обеспечения. После завершения выбора, нажмите кнопку Next> и Finish в следующем окне Summary.
14
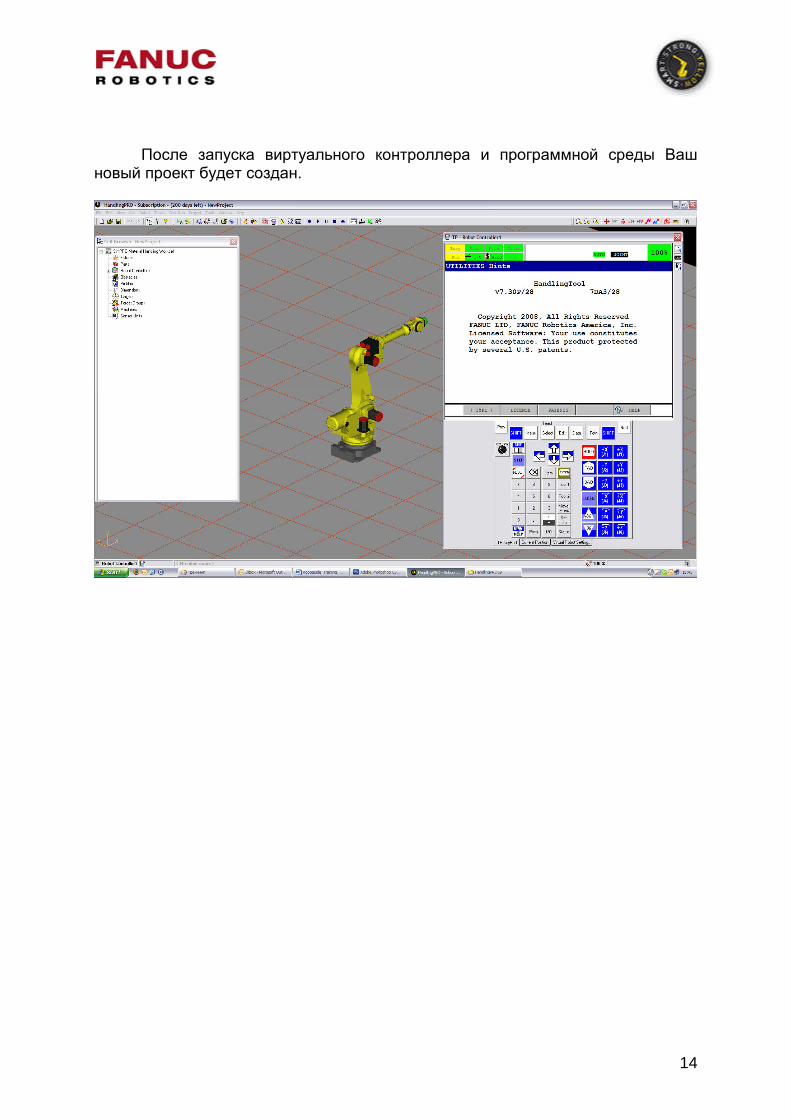
После запуска виртуального контроллера и программной среды Ваш новый проект будет создан.
15
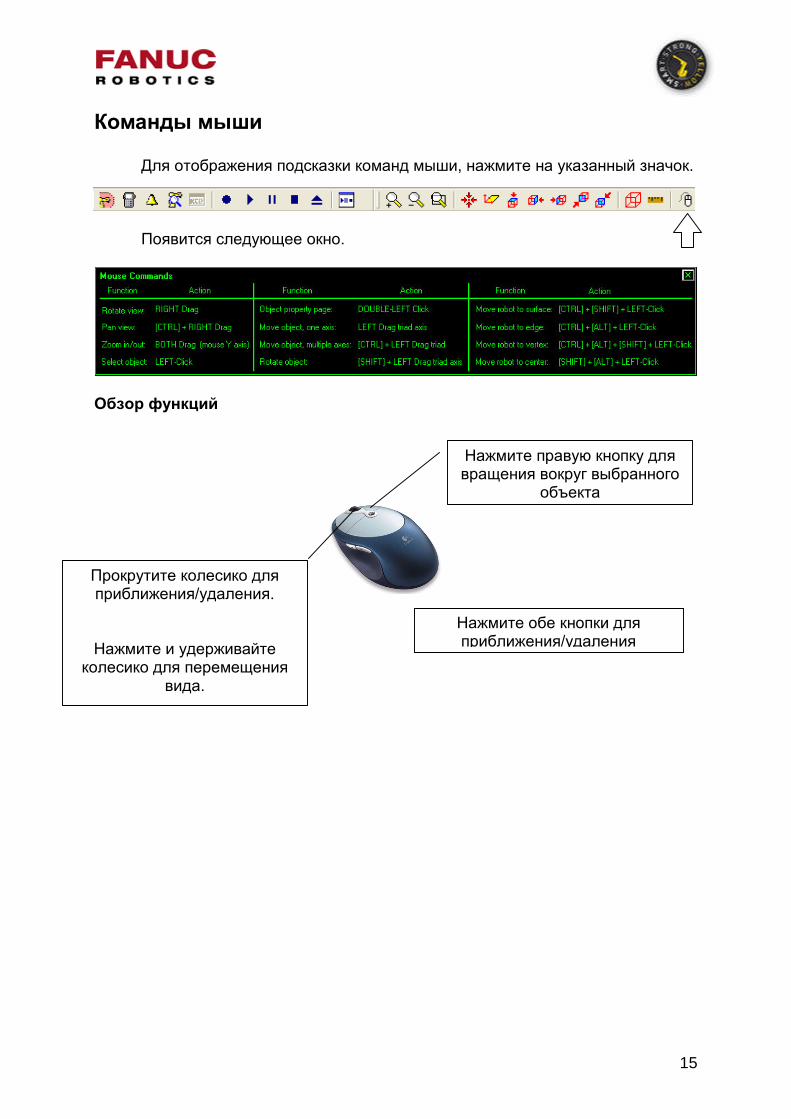
Команды мыши
Для отображения подсказки команд мыши, нажмите на указанный значок.
Появится следующее окно.
Обзор функций
Нажмите правую кнопку для вращения вокруг выбранного
объекта
Прокрутите колесико для приближения/удаления.
Нажмите и удерживайте колесико для перемещения
вида.
Нажмите обе кнопки для приближения/удаления
16
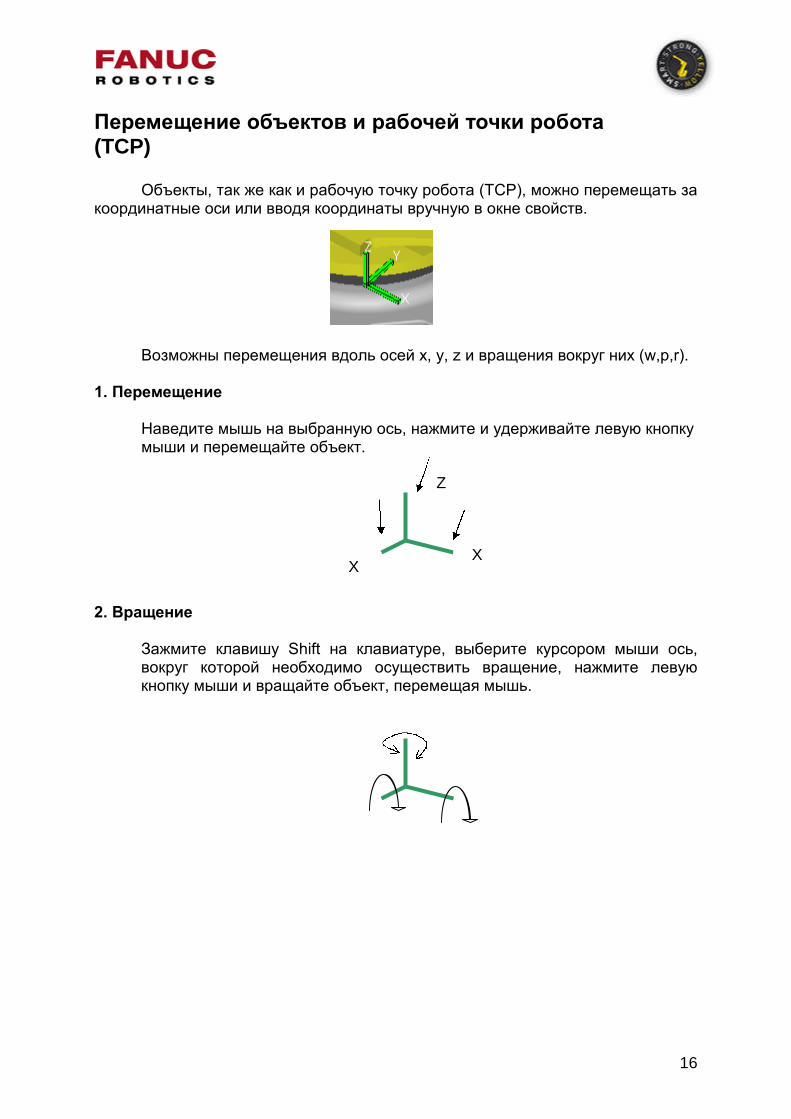
Перемещение объектов и рабочей точки робота (TCP)
Объекты, так же как и рабочую точку робота (TCP), можно перемещать за координатные оси или вводя координаты вручную в окне свойств.
Возможны перемещения вдоль осей x, y, z и вращения вокруг них (w,p,r).
1. Перемещение
Наведите мышь на выбранную ось, нажмите и удерживайте левую кнопку мыши и перемещайте объект.
2. Вращение
Зажмите клавишу Shift на клавиатуре, выберите курсором мыши ось, вокруг которой необходимо осуществить вращение, нажмите левую кнопку мыши и вращайте объект, перемещая мышь.
XX
Z
17
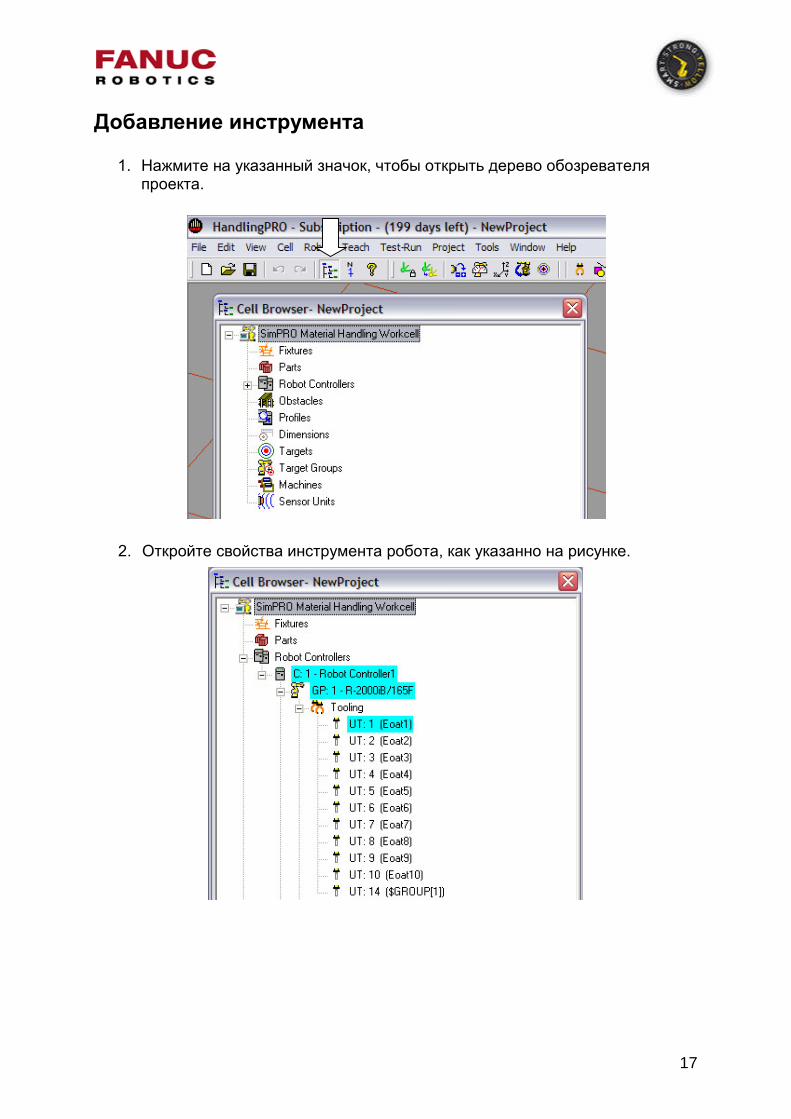
Добавление инструмента
1. Нажмите на указанный значок, чтобы открыть дерево обозревателя проекта.
2. Откройте свойства инструмента робота, как указанно на рисунке.
18
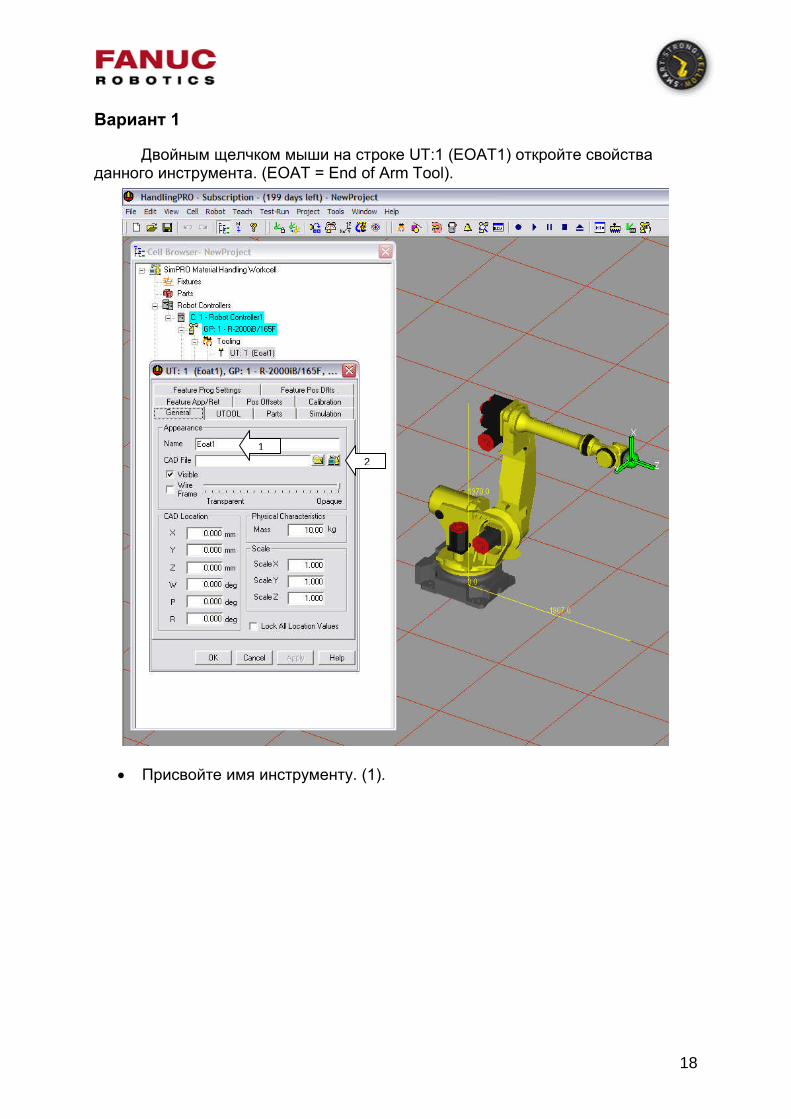
Вариант 1
Двойным щелчком мыши на строке UT:1 (EOAT1) откройте свойства данного инструмента. (EOAT = End of Arm Tool).
Присвойте имя инструменту. (1).
1
2
19
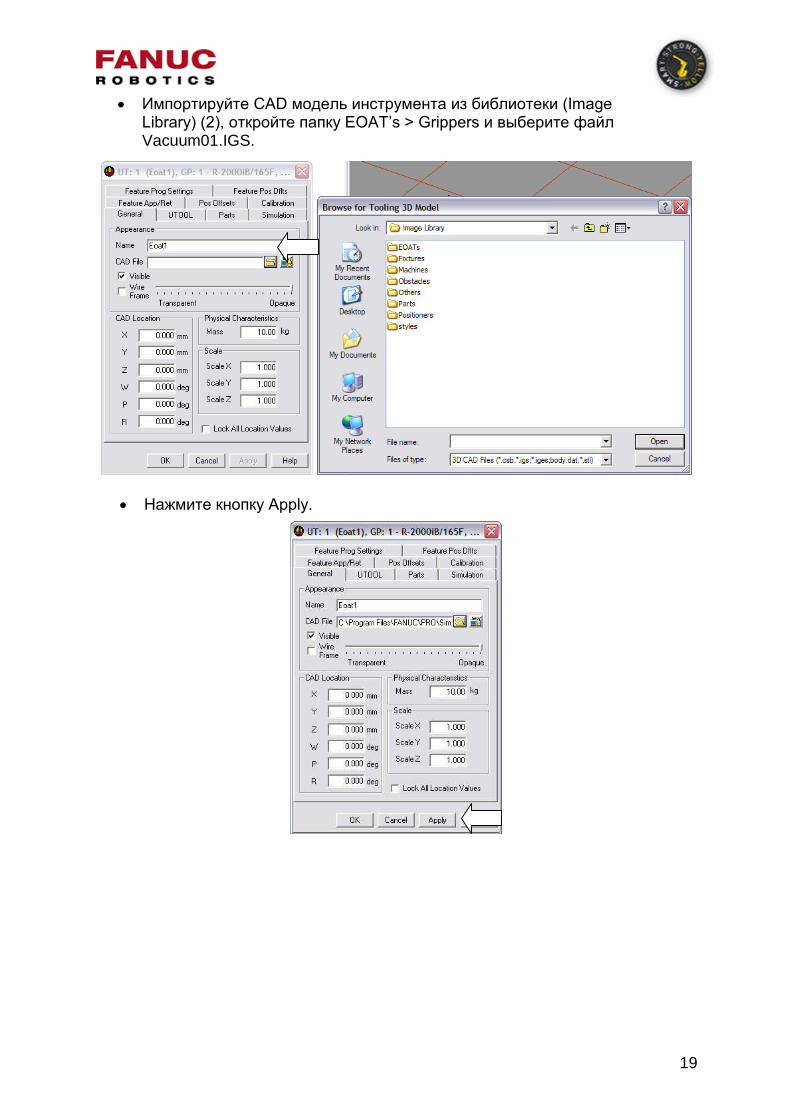
Импортируйте CAD модель инструмента из библиотеки (Image Library) (2), откройте папку EOAT’s > Grippers и выберите файл Vacuum01.IGS.
Нажмите кнопку Apply.
20
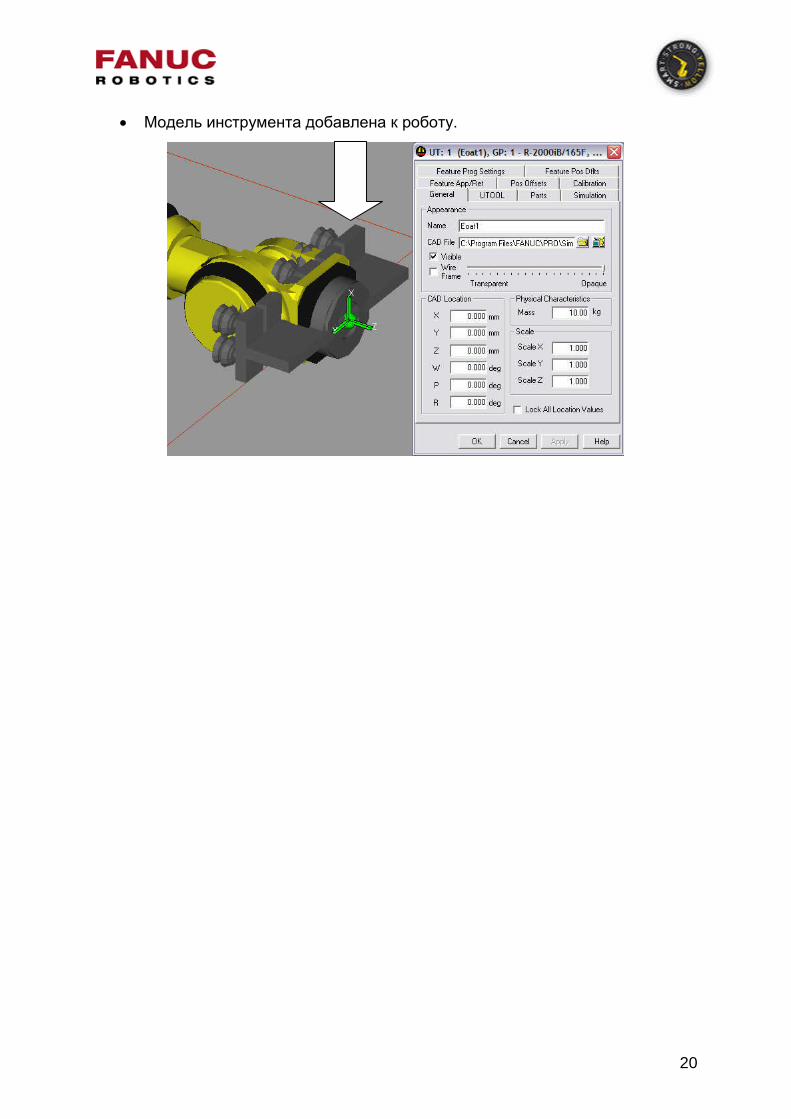
Модель инструмента добавлена к роботу.
21
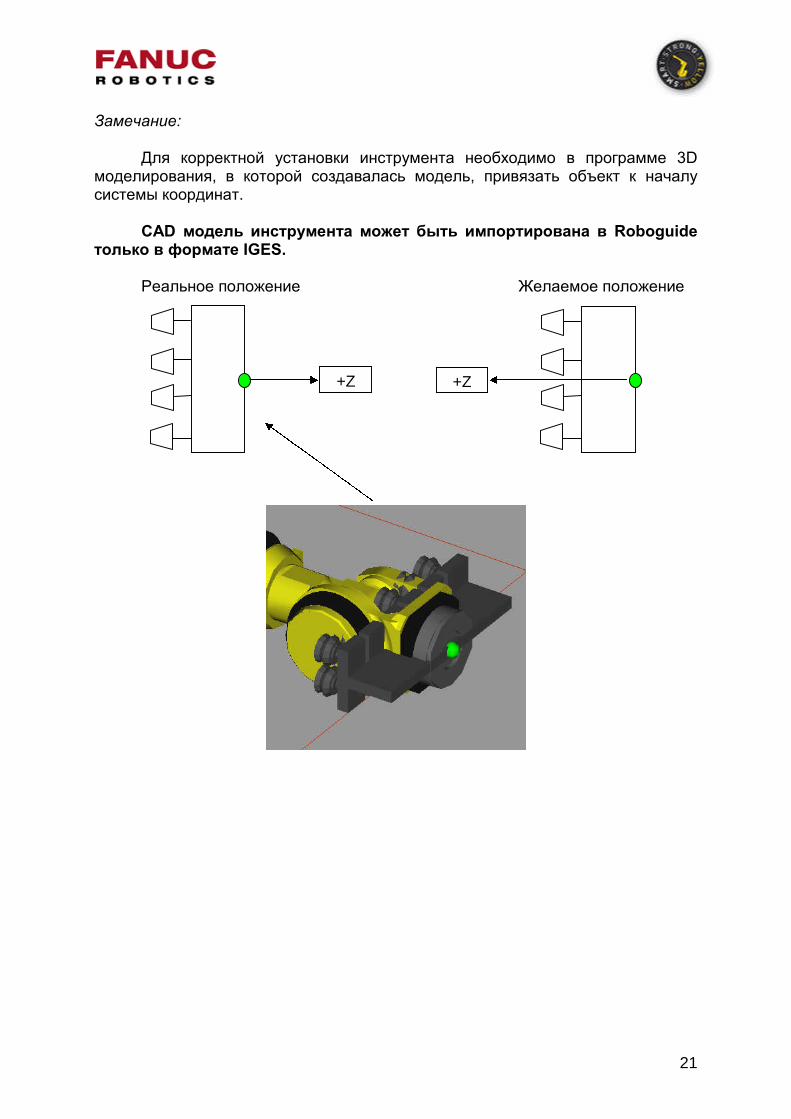
Замечание:
Для корректной установки инструмента необходимо в программе 3D моделирования, в которой создавалась модель, привязать объект к началу системы координат.
CAD модель инструмента может быть импортирована в Roboguide только в формате IGES.
Реальное положение Желаемое положение
+Z +Z
22
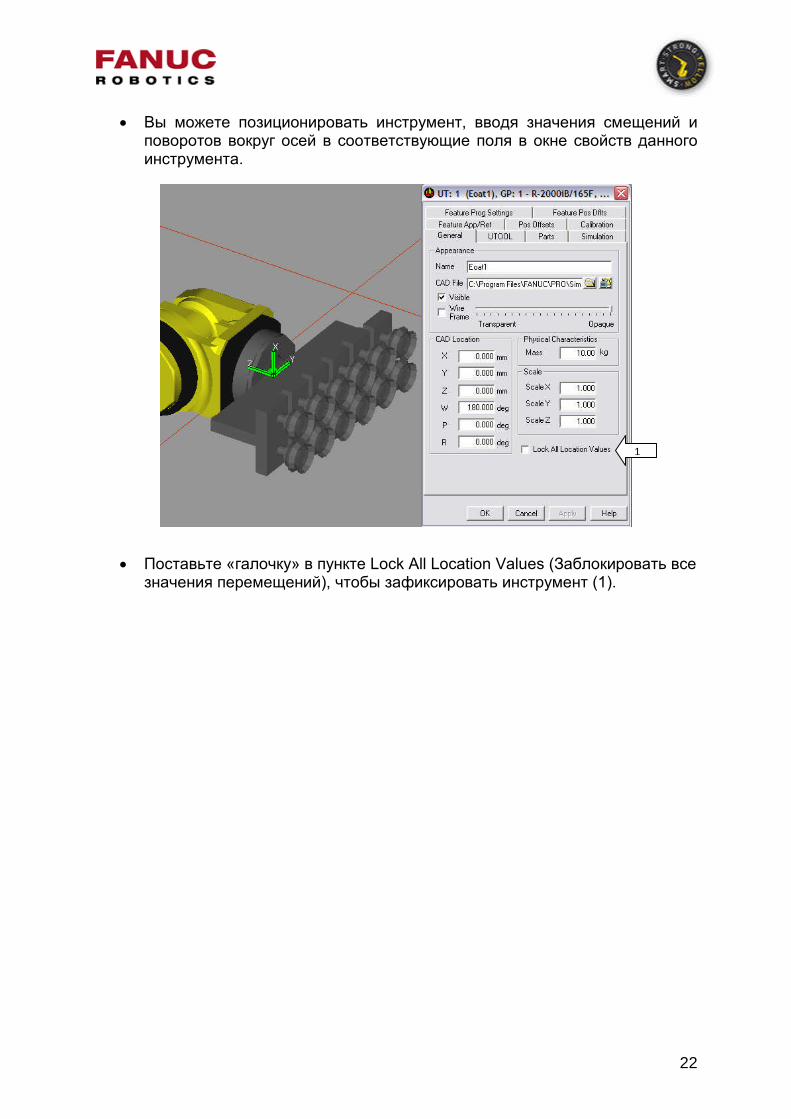
Вы можете позиционировать инструмент, вводя значения смещений и поворотов вокруг осей в соответствующие поля в окне свойств данного инструмента.
Поставьте «галочку» в пункте Lock All Location Values (Заблокировать все значения перемещений), чтобы зафиксировать инструмент (1).
1
23
Вариант 2
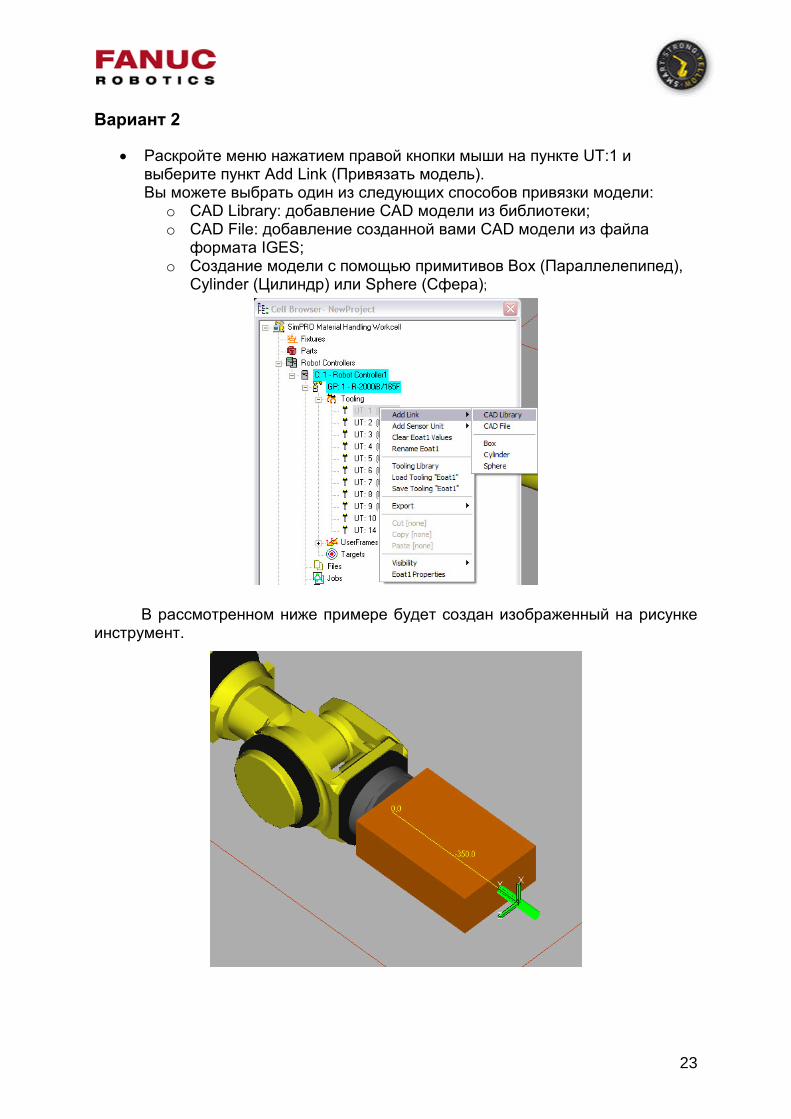
Раскройте меню нажатием правой кнопки мыши на пункте UT:1 и выберите пункт Add Link (Привязать модель). Вы можете выбрать один из следующих способов привязки модели:
o CAD Library: добавление CAD модели из библиотеки; o CAD File: добавление созданной вами CAD модели из файла
формата IGES; o Создание модели с помощью примитивов Box (Параллелепипед),
Cylinder (Цилиндр) или Sphere (Сфера);
В рассмотренном ниже примере будет создан изображенный на рисунке инструмент.
24
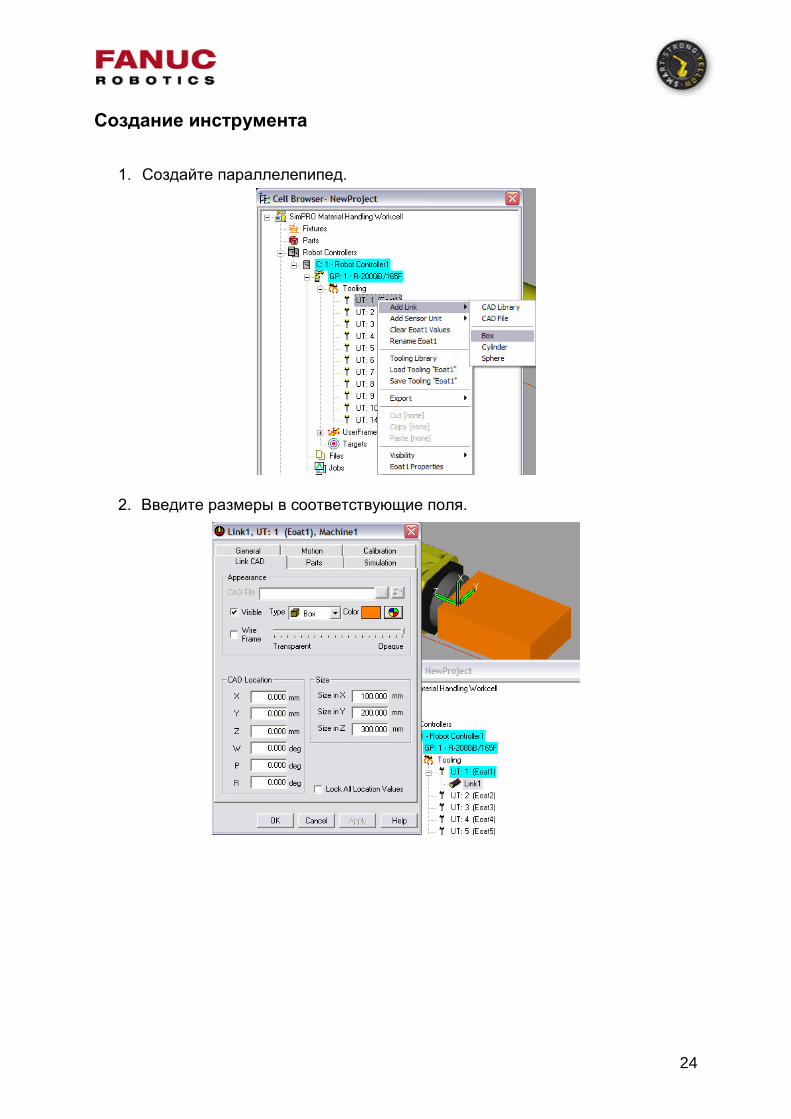
Создание инструмента
1. Создайте параллелепипед.
2. Введите размеры в соответствующие поля.
25
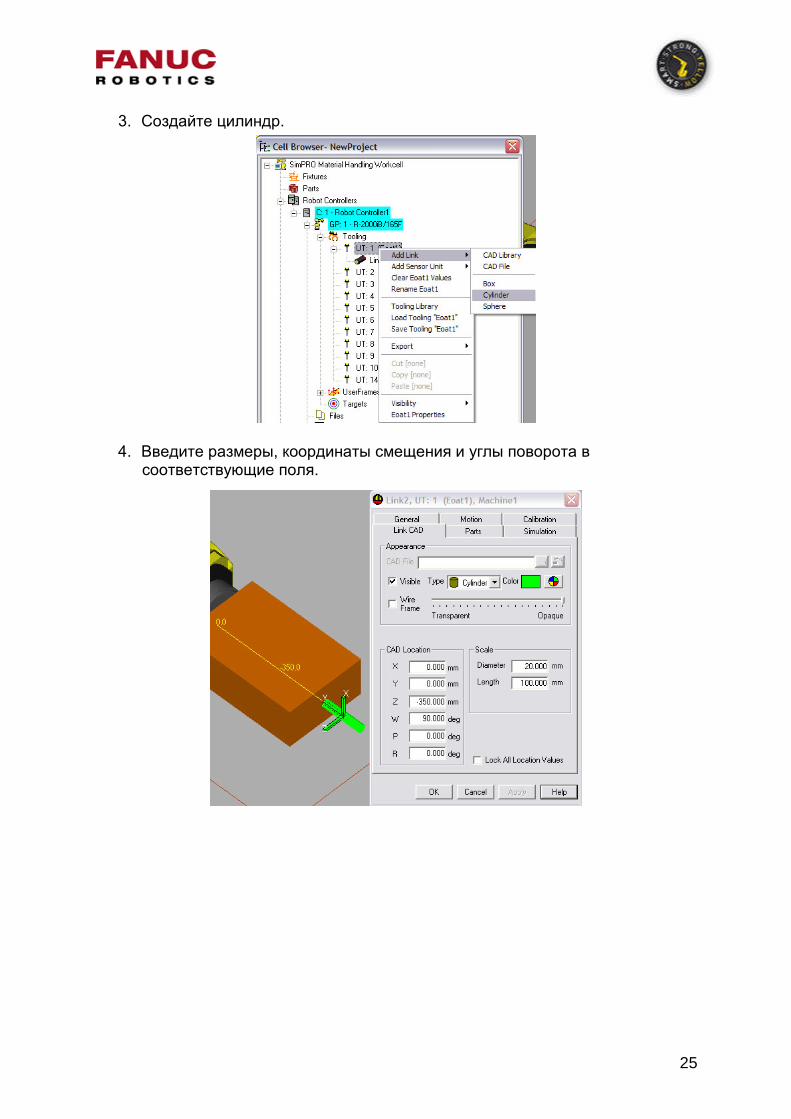
3. Создайте цилиндр.
4. Введите размеры, координаты смещения и углы поворота в соответствующие поля.
26
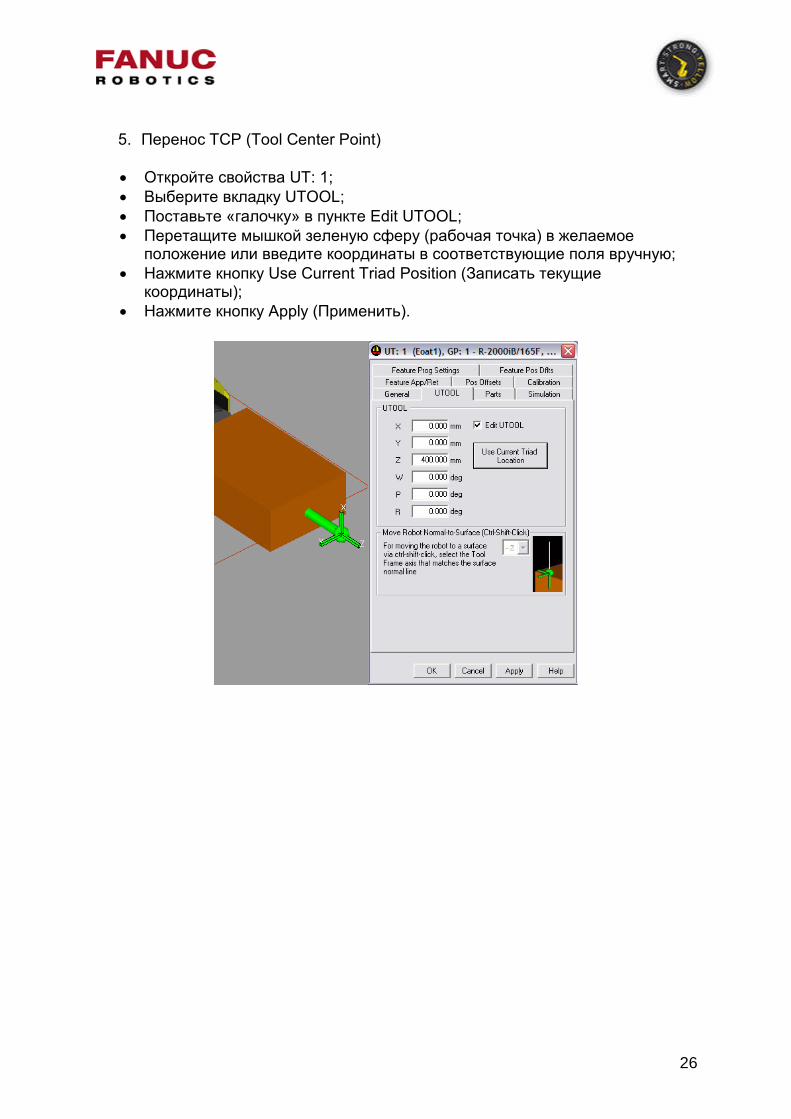
5. Перенос TCP (Tool Center Point)
Откройте свойства UT: 1; Выберите вкладку UTOOL; Поставьте «галочку» в пункте Edit UTOOL; Перетащите мышкой зеленую сферу (рабочая точка) в желаемое
положение или введите координаты в соответствующие поля вручную; Нажмите кнопку Use Current Triad Position (Записать текущие
координаты); Нажмите кнопку Apply (Применить).
27
Добавление фиксирующего приспособления (Fixture)
Описание
Фиксирующие приспособления включают в себя
Конвейерные ленты (Conveyer) Обрабатывающие станки FANUC (Machine) Разное (Misc) Электромоторы (Motors) Паллеты (Pallets) Стойки (Racks, Shelf) Столы (Table)
CAD модель фиксирующего устройства может быть импортирована в формате IGES или создана в программном комплексе Roboguide с помощью простейших геометрических форм.
Перед импортированием CAD моделей изделий и заготовок, необходимо создать фиксирующее приспособление, для последующей привязки деталей.
28
Добавление
Пример добавления конвейера из библиотеки
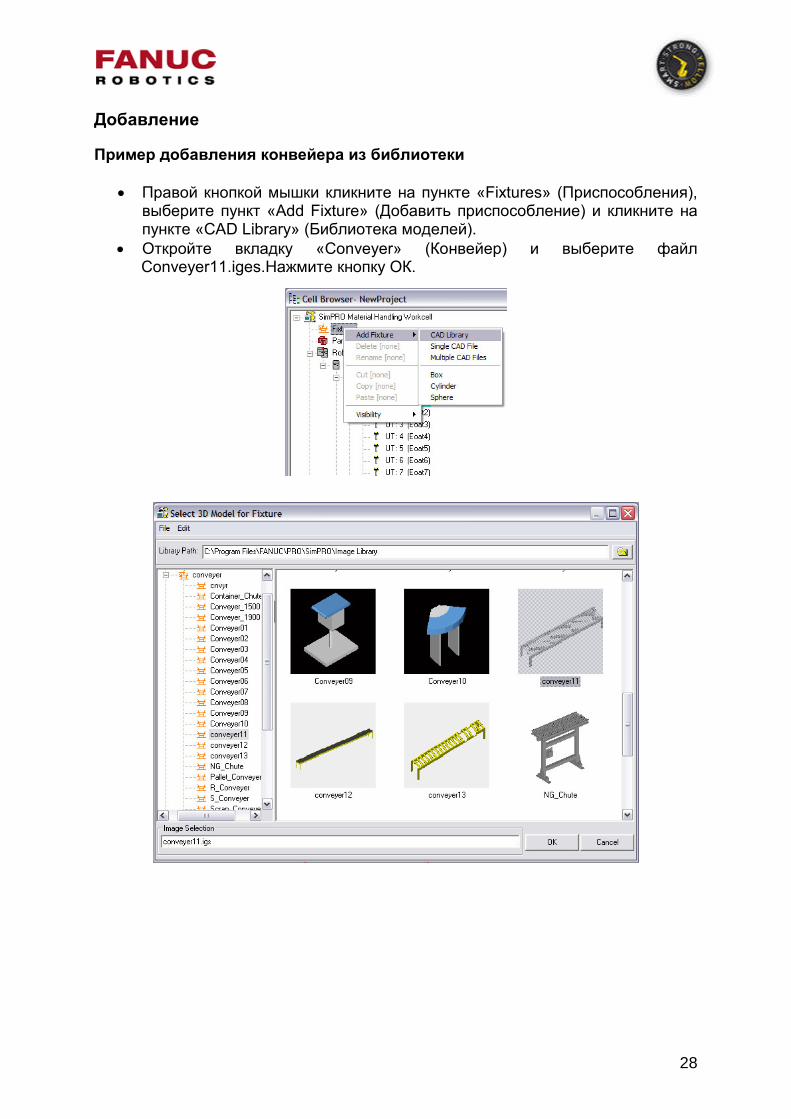
Правой кнопкой мышки кликните на пункте «Fixtures» (Приспособления), выберите пункт «Add Fixture» (Добавить приспособление) и кликните на пункте «CAD Library» (Библиотека моделей).
Откройте вкладку «Conveyer» (Конвейер) и выберите файл Conveyer11.iges.Нажмите кнопку ОК.
29
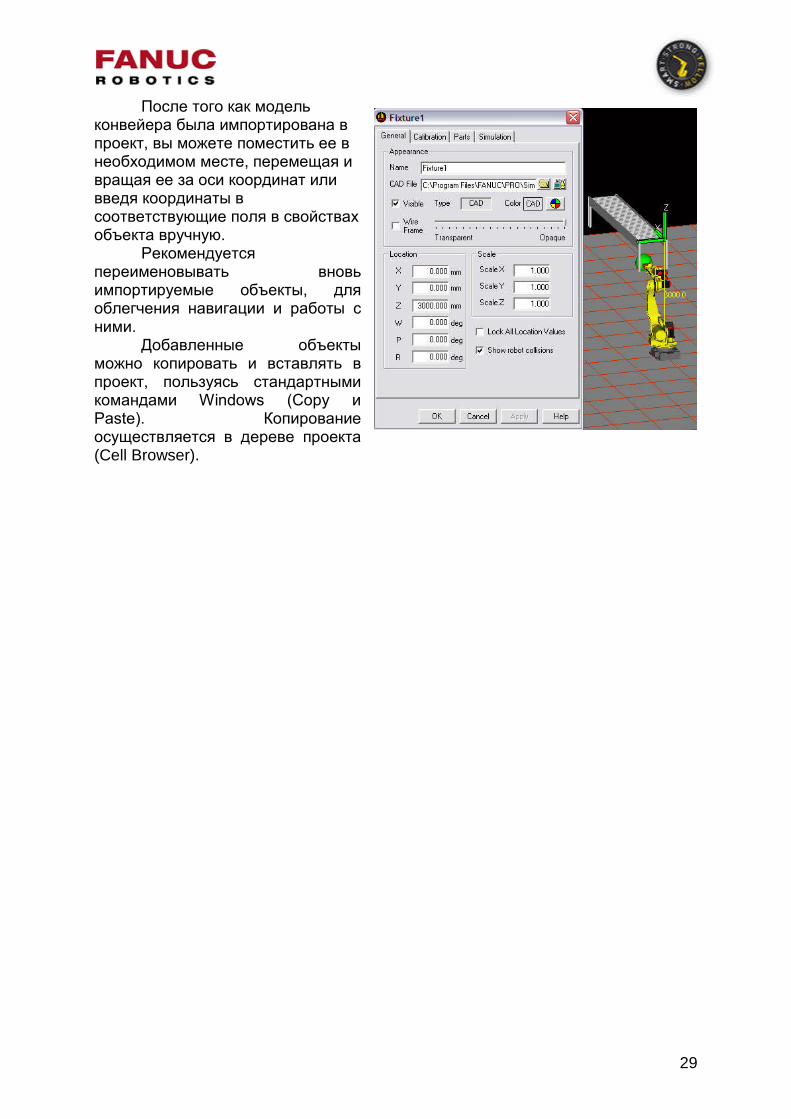
После того как модель конвейера была импортирована в проект, вы можете поместить ее в необходимом месте, перемещая и вращая ее за оси координат или введя координаты в соответствующие поля в свойствах объекта вручную. Рекомендуется переименовывать вновь импортируемые объекты, для облегчения навигации и работы с ними.
Добавленные объекты можно копировать и вставлять в проект, пользуясь стандартными командами Windows (Copy и Paste). Копирование осуществляется в дереве проекта (Cell Browser).
30
Добавление препятствий
Описание
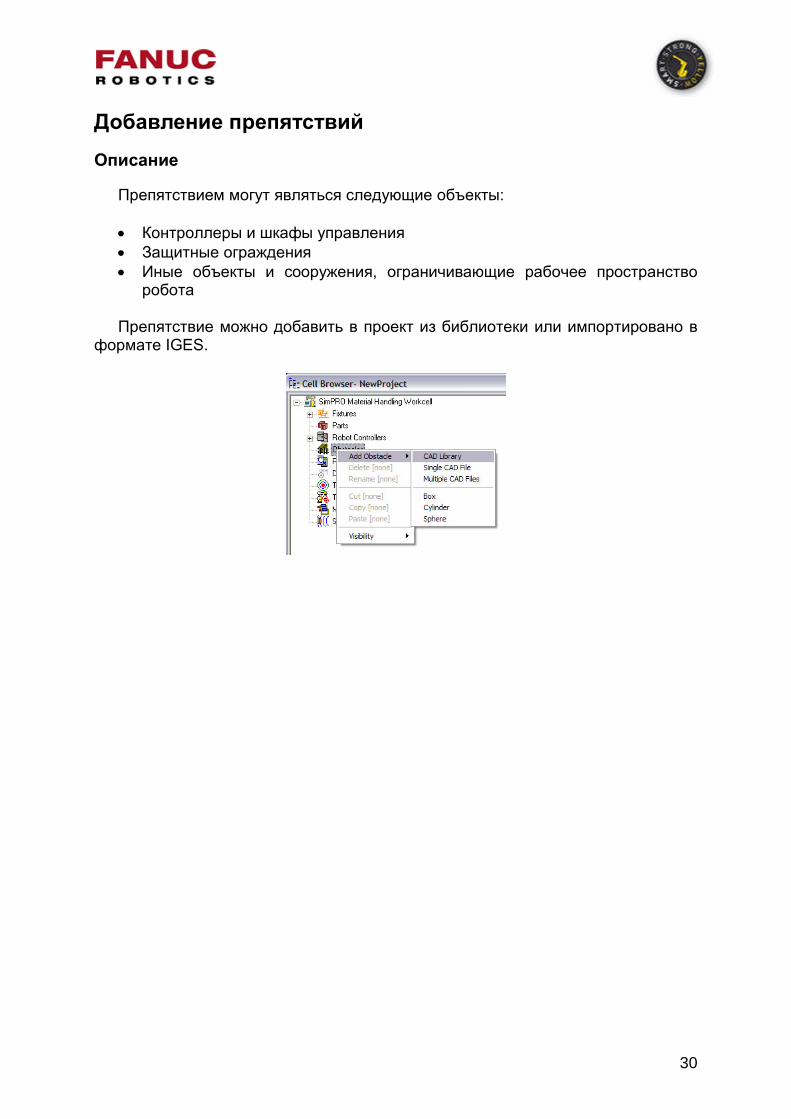
Препятствием могут являться следующие объекты:
Контроллеры и шкафы управления Защитные ограждения Иные объекты и сооружения, ограничивающие рабочее пространство
робота
Препятствие можно добавить в проект из библиотеки или импортировано в формате IGES.
31
Добавление ограждения
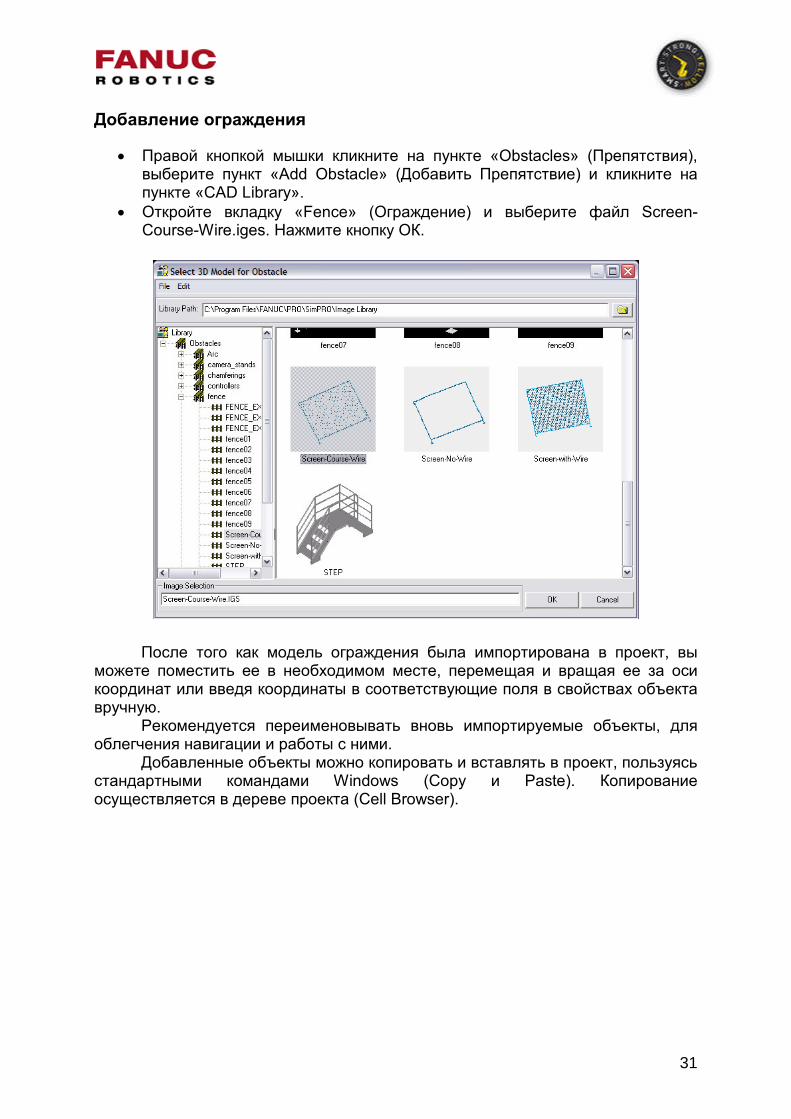
Правой кнопкой мышки кликните на пункте «Obstacles» (Препятствия), выберите пункт «Add Obstacle» (Добавить Препятствие) и кликните на пункте «CAD Library».
Откройте вкладку «Fence» (Ограждение) и выберите файл Screen-Course-Wire.iges. Нажмите кнопку ОК.
После того как модель ограждения была импортирована в проект, вы можете поместить ее в необходимом месте, перемещая и вращая ее за оси координат или введя координаты в соответствующие поля в свойствах объекта вручную. Рекомендуется переименовывать вновь импортируемые объекты, для облегчения навигации и работы с ними.
Добавленные объекты можно копировать и вставлять в проект, пользуясь стандартными командами Windows (Copy и Paste). Копирование осуществляется в дереве проекта (Cell Browser).
32
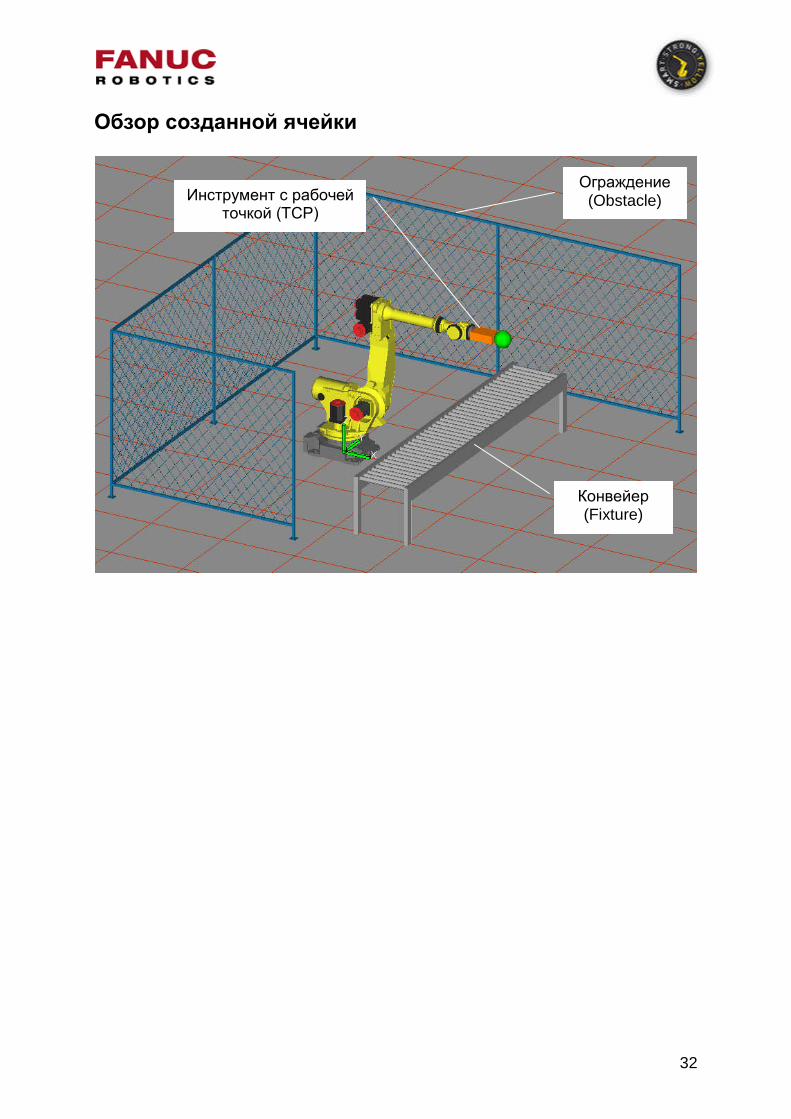
Обзор созданной ячейки
Ограждение (Obstacle)Инструмент с рабочей
точкой (TCP)
Конвейер (Fixture)
33
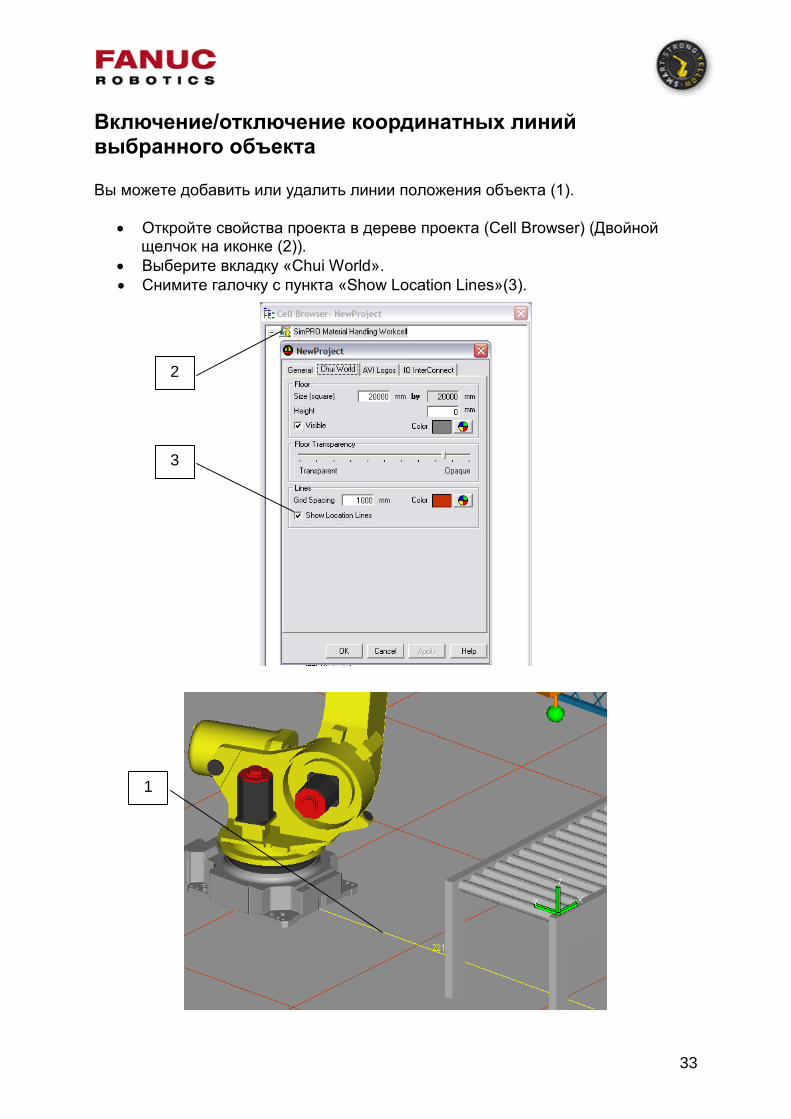
Включение/отключение координатных линий выбранного объекта
Вы можете добавить или удалить линии положения объекта (1).
Откройте свойства проекта в дереве проекта (Cell Browser) (Двойной щелчок на иконке (2)).
Выберите вкладку «Chui World». Снимите галочку с пункта «Show Location Lines»(3).
2
3
1
2
3

34
Изменение фона и цветовой индикации
Выберите пункт «Tool» в панели инструментов Выберите «Options». Выберите вкладку «Colors».
В этом окне вы можете изменить цвет фона и другие настройки цветовой индикации.
35
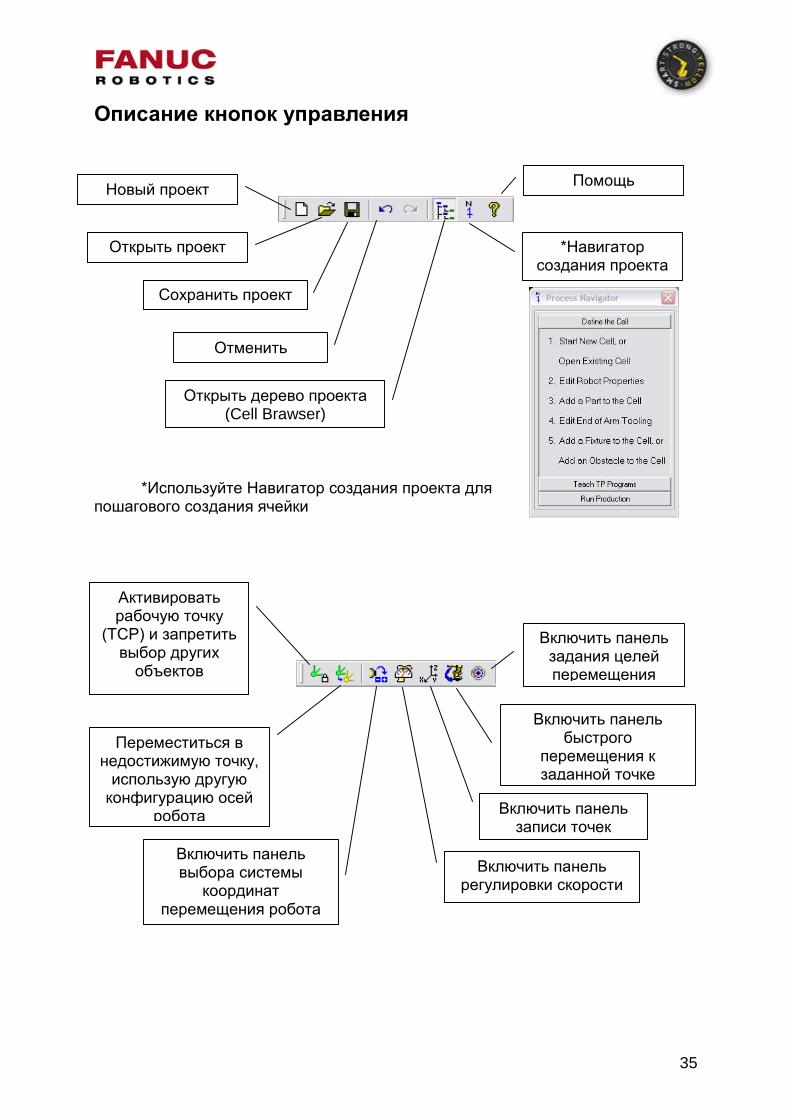
Описание кнопок управления
*Используйте Навигатор создания проекта для пошагового создания ячейки
Новый проект
Открыть проект
Сохранить проект
Отменить
Открыть дерево проекта (Cell Brawser)
*Навигатор создания проекта
Помощь
Активировать рабочую точку
(TCP) и запретить выбор других
объектов
Переместиться в недостижимую точку,
использую другую конфигурацию осей
робота
Включить панель выбора системы
координат перемещения робота
Включить панель регулировки скорости
Включить панель задания целей перемещения
Включить панель быстрого
перемещения к заданной точке
Включить панель записи точек
36
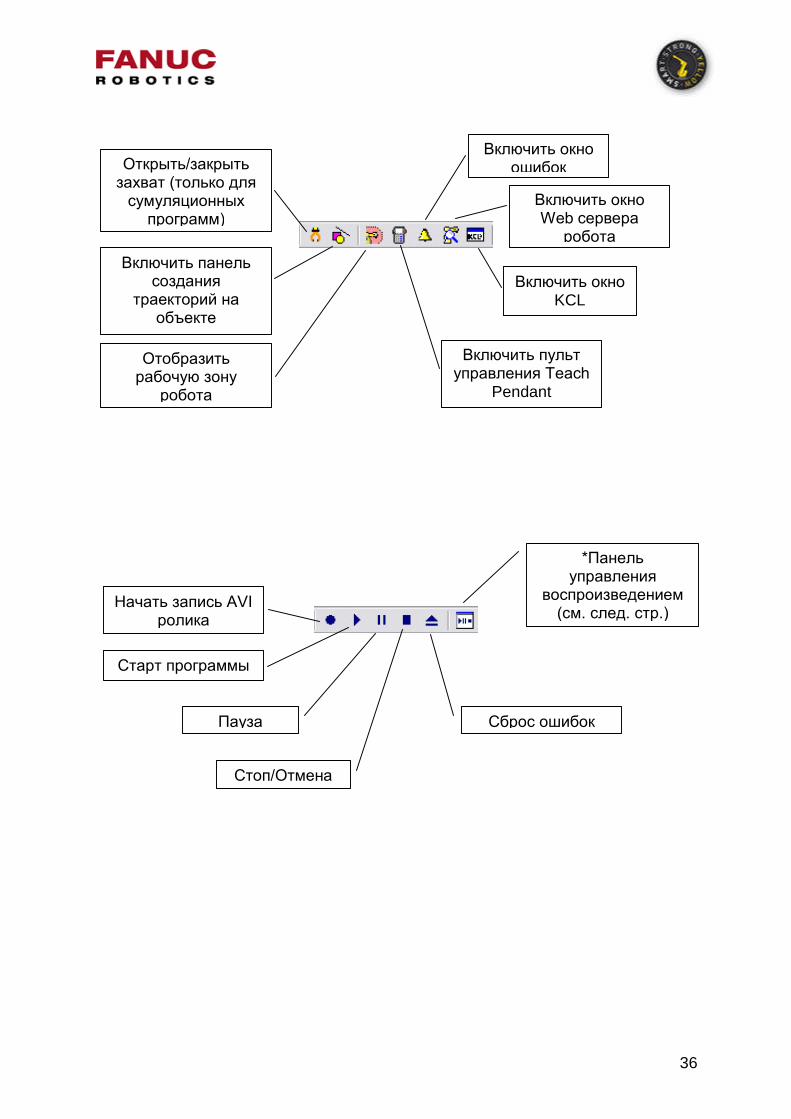
Открыть/закрыть захват (только для
сумуляционных программ)
Включить панель создания
траекторий на объекте
Отобразить рабочую зону
робота
Включить пульт управления Teach
Pendant
Включить окно ошибок
Включить окно Web сервера
робота
Начать запись AVI ролика
Старт программы
Сброс ошибокПауза
*Панель управления
воспроизведением (см. след. стр.)
Стоп/Отмена
Включить окно KCL
37
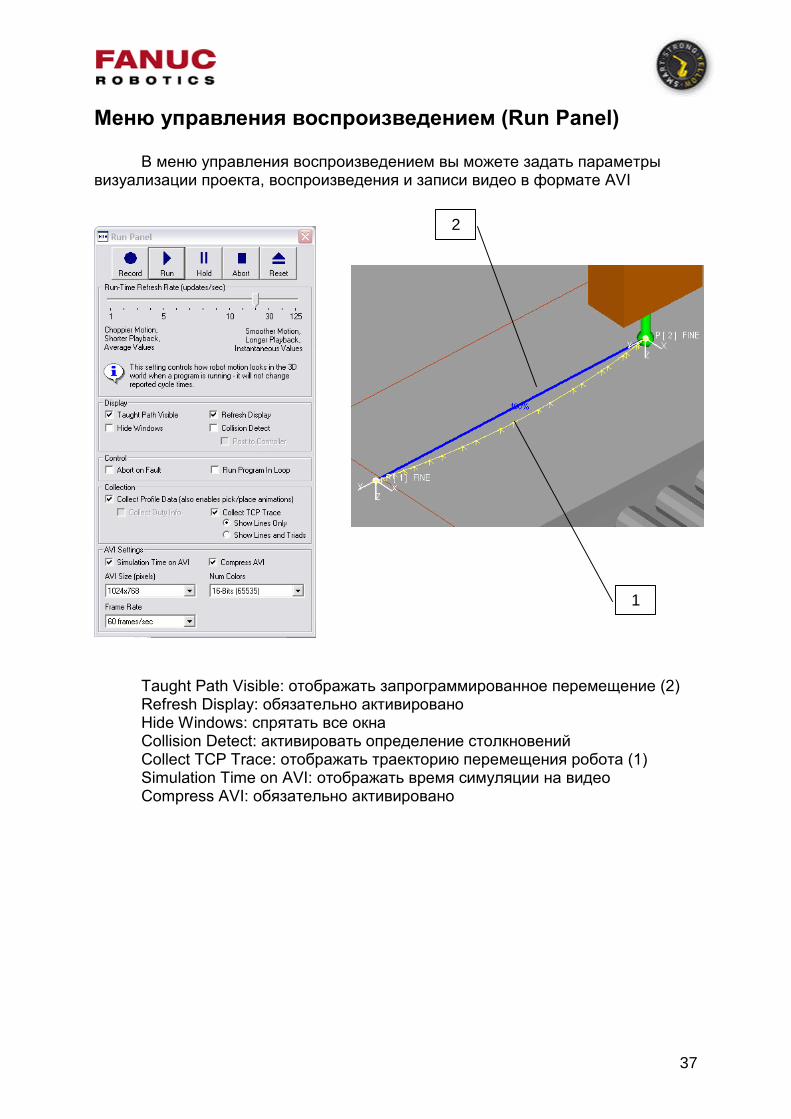
Меню управления воспроизведением (Run Panel)
В меню управления воспроизведением вы можете задать параметры визуализации проекта, воспроизведения и записи видео в формате AVI
Taught Path Visible: отображать запрограммированное перемещение (2) Refresh Display: обязательно активировано Hide Windows: спрятать все окна Collision Detect: активировать определение столкновений Collect TCP Trace: отображать траекторию перемещения робота (1) Simulation Time on AVI: отображать время симуляции на видео Compress AVI: обязательно активировано
1
2
38
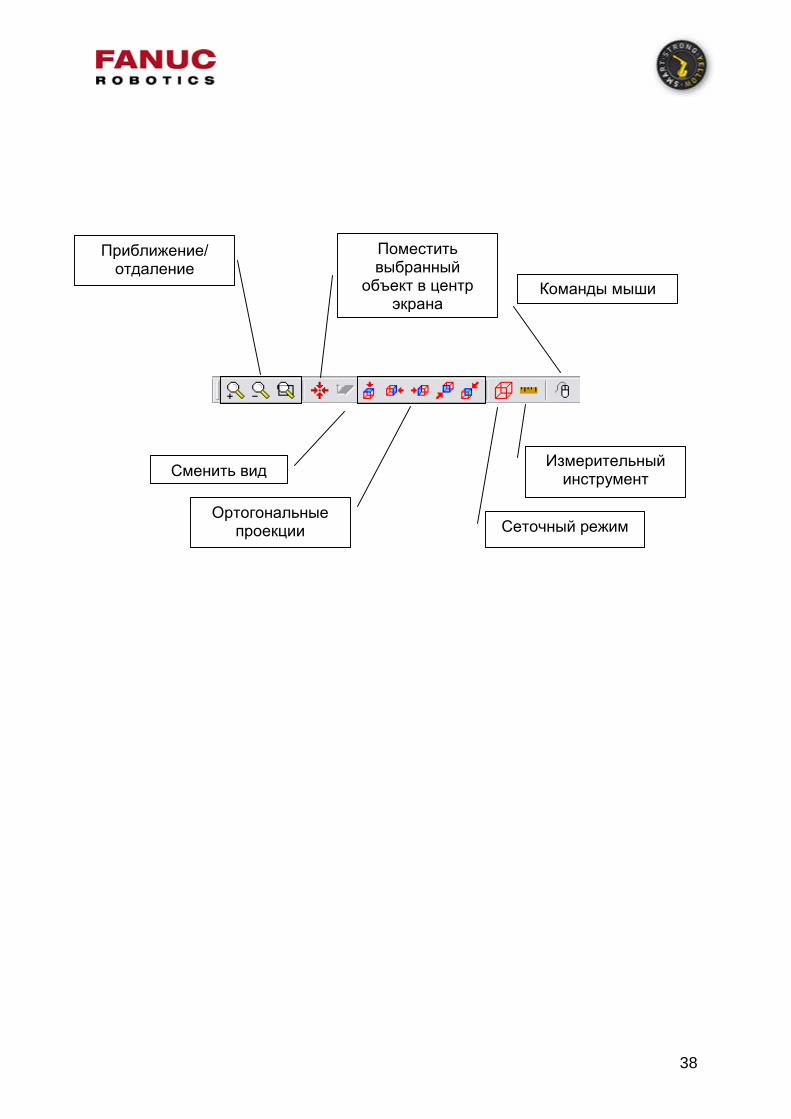
Приближение/ отдаление
Поместить выбранный
объект в центр экрана
Сменить вид
Ортогональные проекции Сеточный режим
Измерительный инструмент
Команды мыши
39
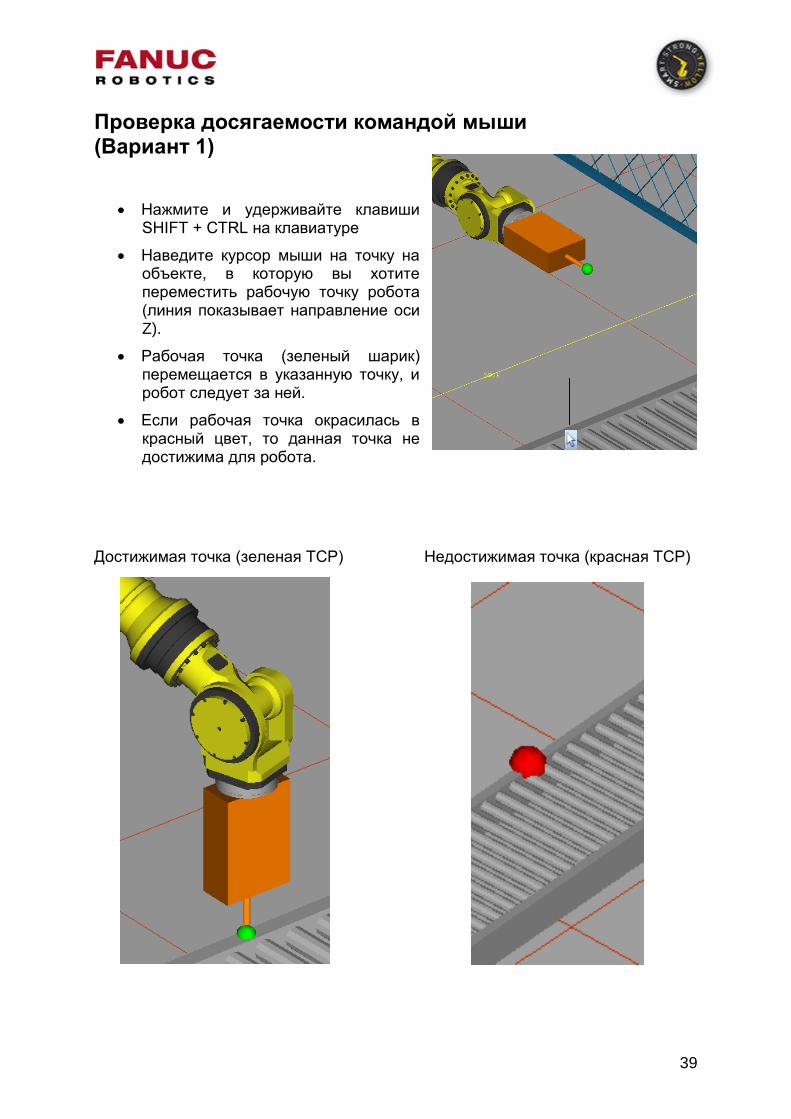
Проверка досягаемости командой мыши (Вариант 1)
Нажмите и удерживайте клавиши SHIFT + CTRL на клавиатуре
Наведите курсор мыши на точку на объекте, в которую вы хотите переместить рабочую точку робота (линия показывает направление оси Z).
Рабочая точка (зеленый шарик) перемещается в указанную точку, и робот следует за ней.
Если рабочая точка окрасилась в красный цвет, то данная точка не достижима для робота.
Достижимая точка (зеленая TCP) Недостижимая точка (красная TCP)
40
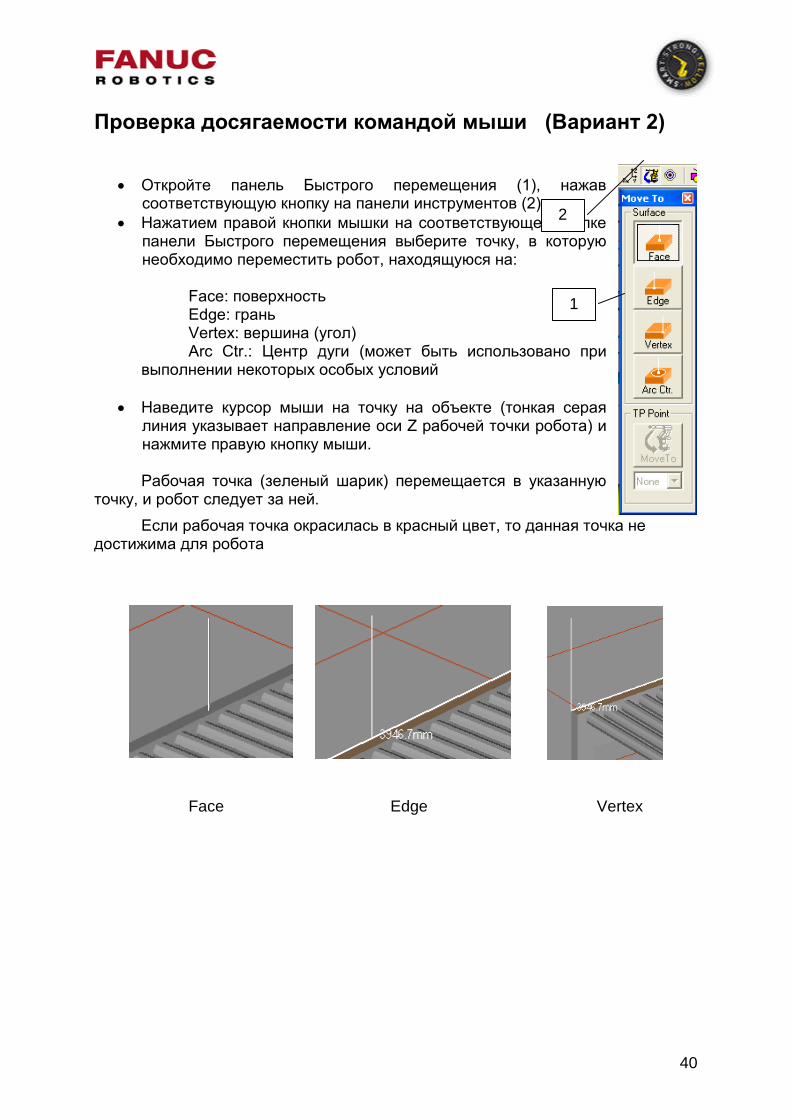
Проверка досягаемости командой мыши (Вариант 2)
Откройте панель Быстрого перемещения (1), нажав соответствующую кнопку на панели инструментов (2).
Нажатием правой кнопки мышки на соответствующей кнопке панели Быстрого перемещения выберите точку, в которую необходимо переместить робот, находящуюся на:
Face: поверхность Edge: грань Vertex: вершина (угол) Arc Ctr.: Центр дуги (может быть использовано при
выполнении некоторых особых условий
Наведите курсор мыши на точку на объекте (тонкая серая линия указывает направление оси Z рабочей точки робота) и нажмите правую кнопку мыши.
Рабочая точка (зеленый шарик) перемещается в указанную точку, и робот следует за ней.
Если рабочая точка окрасилась в красный цвет, то данная точка не достижима для робота
Face Edge Vertex
2
1
41
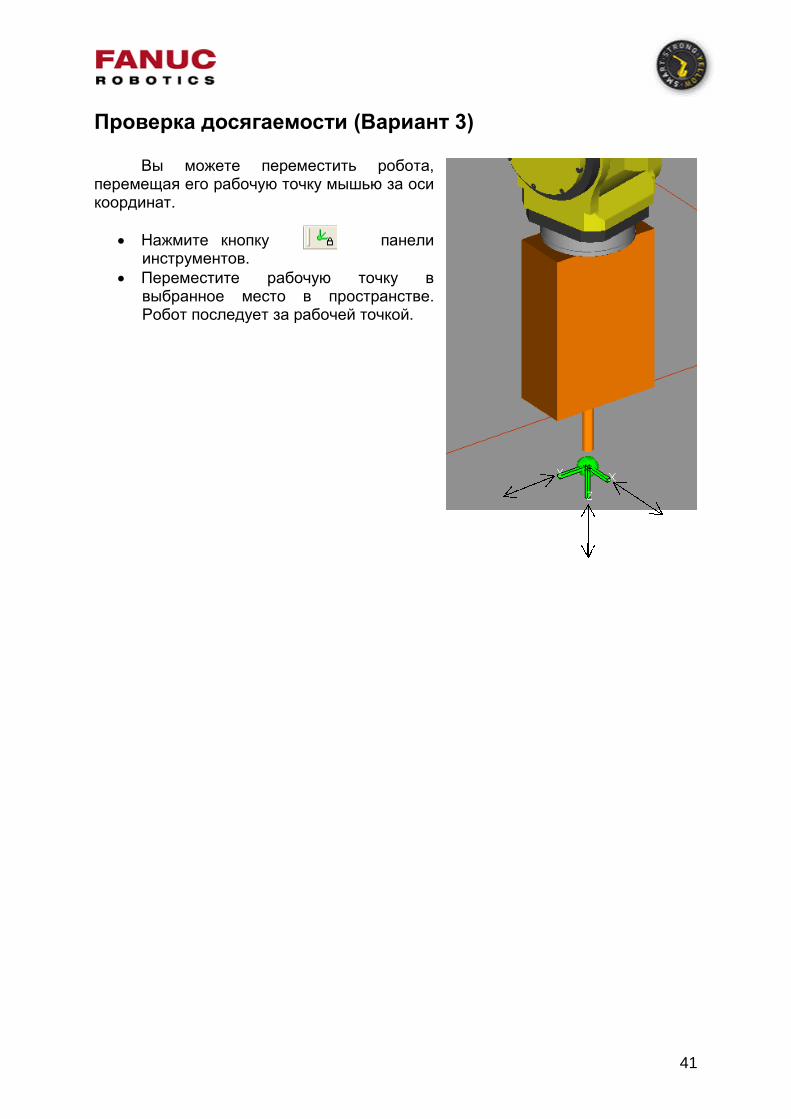
Проверка досягаемости (Вариант 3)
Вы можете переместить робота, перемещая его рабочую точку мышью за оси координат.
Нажмите кнопку панели инструментов.
Переместите рабочую точку в выбранное место в пространстве. Робот последует за рабочей точкой.
42
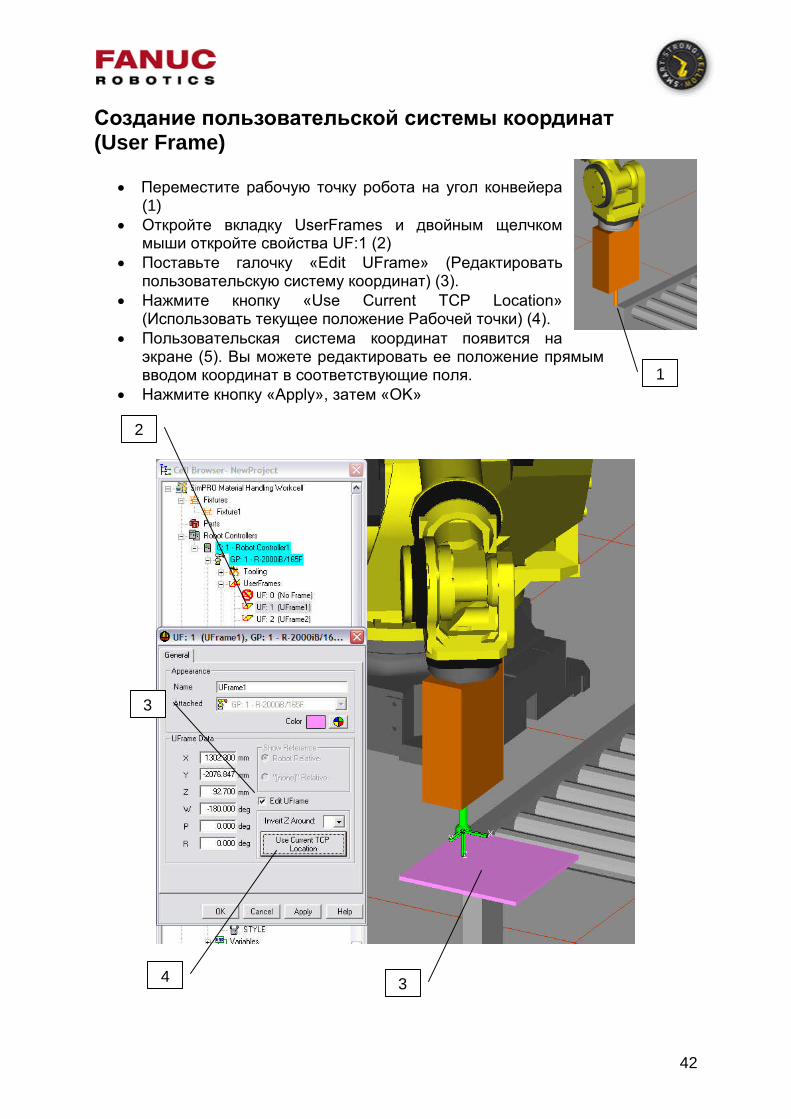
Создание пользовательской системы координат (User Frame)
Переместите рабочую точку робота на угол конвейера (1)
Откройте вкладку UserFrames и двойным щелчком мыши откройте свойства UF:1 (2)
Поставьте галочку «Edit UFrame» (Редактировать пользовательскую систему координат) (3).
Нажмите кнопку «Use Current TCP Location» (Использовать текущее положение Рабочей точки) (4).
Пользовательская система координат появится на экране (5). Вы можете редактировать ее положение прямым вводом координат в соответствующие поля.
Нажмите кнопку «Apply», затем «OK»
4
3
3
1
2
43
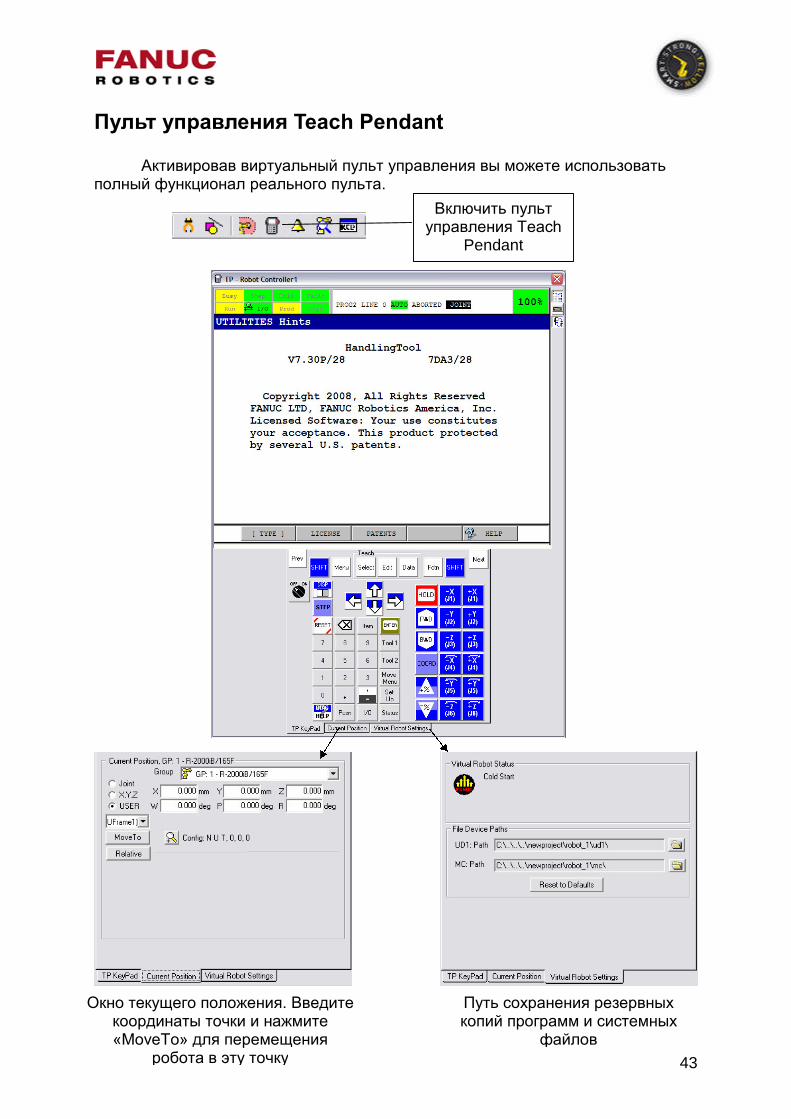
Пульт управления Teach Pendant
Активировав виртуальный пульт управления вы можете использовать полный функционал реального пульта.
Окно текущего положения. Введите координаты точки и нажмите «MoveTo» для перемещения
робота в эту точку
Путь сохранения резервных копий программ и системных
файлов
Включить пульт управления Teach
Pendant
44
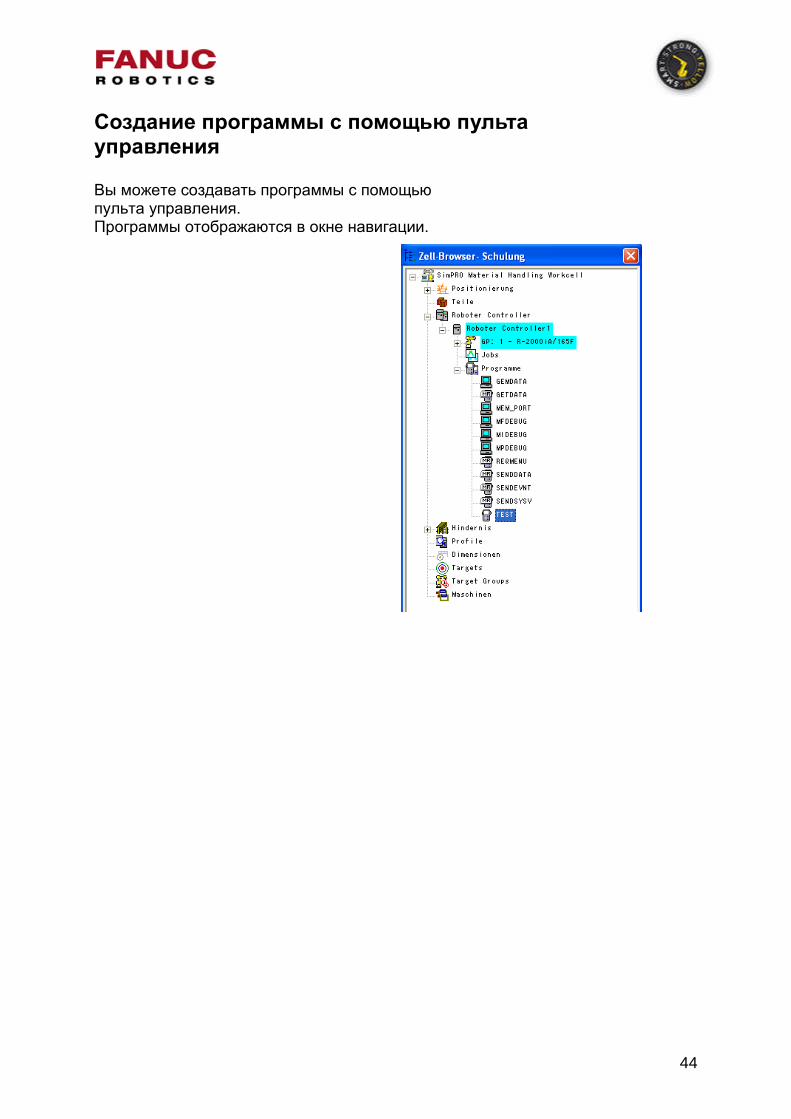
Создание программы с помощью пульта управления
Вы можете создавать программы с помощью пульта управления. Программы отображаются в окне навигации.
45
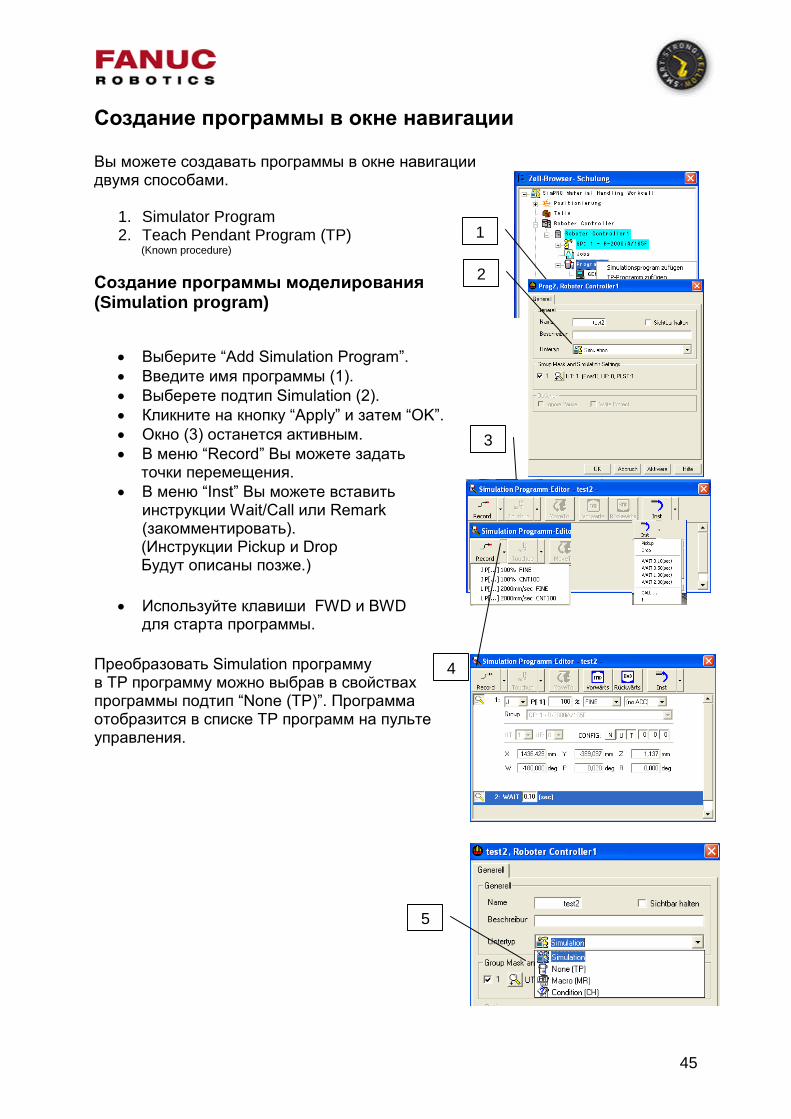
Создание программы в окне навигации
Вы можете создавать программы в окне навигации двумя способами.
1. Simulator Program2. Teach Pendant Program (TP)
(Known procedure)
Создание программы моделирования (Simulation program)
Выберите “Add Simulation Program”. Введите имя программы (1). Выберете подтип Simulation (2). Кликните на кнопку “Apply” и затем “OK”. Окно (3) останется активным. В меню “Record” Вы можете задать
точки перемещения. В меню “Inst” Вы можете вставить
инструкции Wait/Call или Remark (закомментировать). (Инструкции Pickup и Drop Будут описаны позже.)
Используйте клавиши FWD и BWD для старта программы.
Преобразовать Simulation программу в TP программу можно выбрав в свойствах программы подтип “None (TP)”. Программа отобразится в списке TP программ на пульте управления.
5
1
2
3
4
46
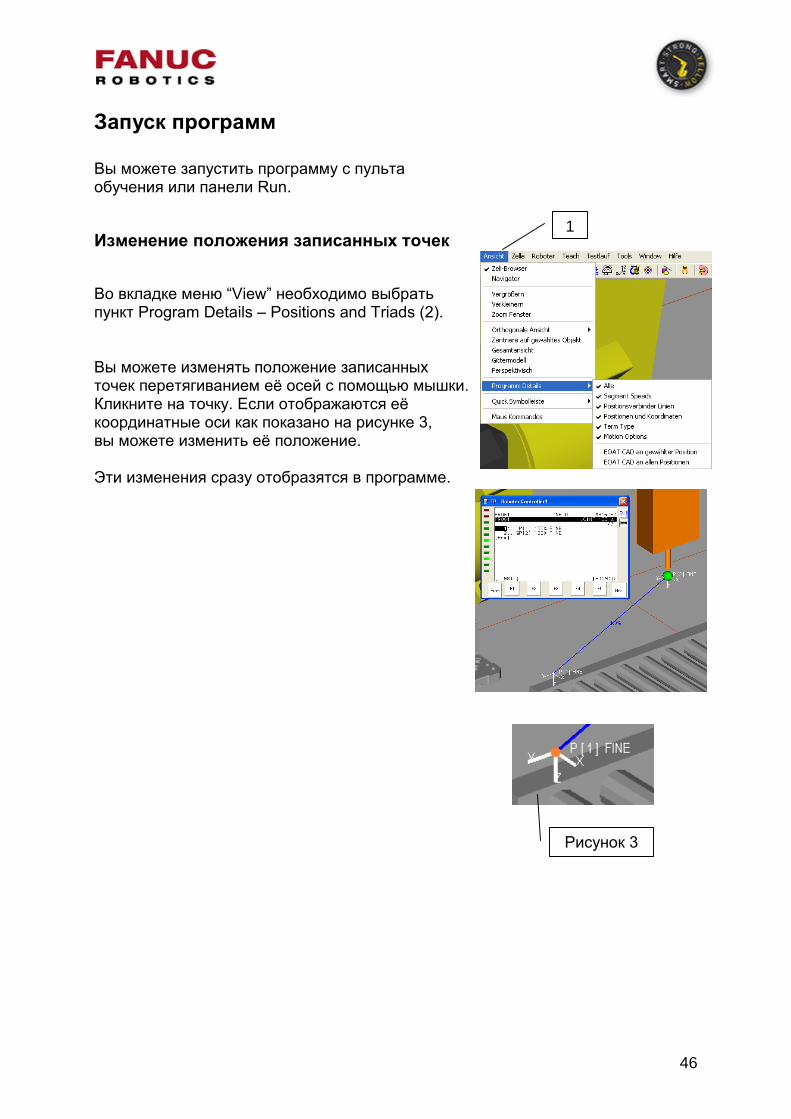
Запуск программ
Вы можете запустить программу с пульта обучения или панели Run.
Изменение положения записанных точек
Во вкладке меню “View” необходимо выбрать пункт Program Details – Positions and Triads (2).
Вы можете изменять положение записанных точек перетягиванием её осей с помощью мышки. Кликните на точку. Если отображаются её координатные оси как показано на рисунке 3, вы можете изменить её положение.
Эти изменения сразу отобразятся в программе.
1
Рисунок 3
47
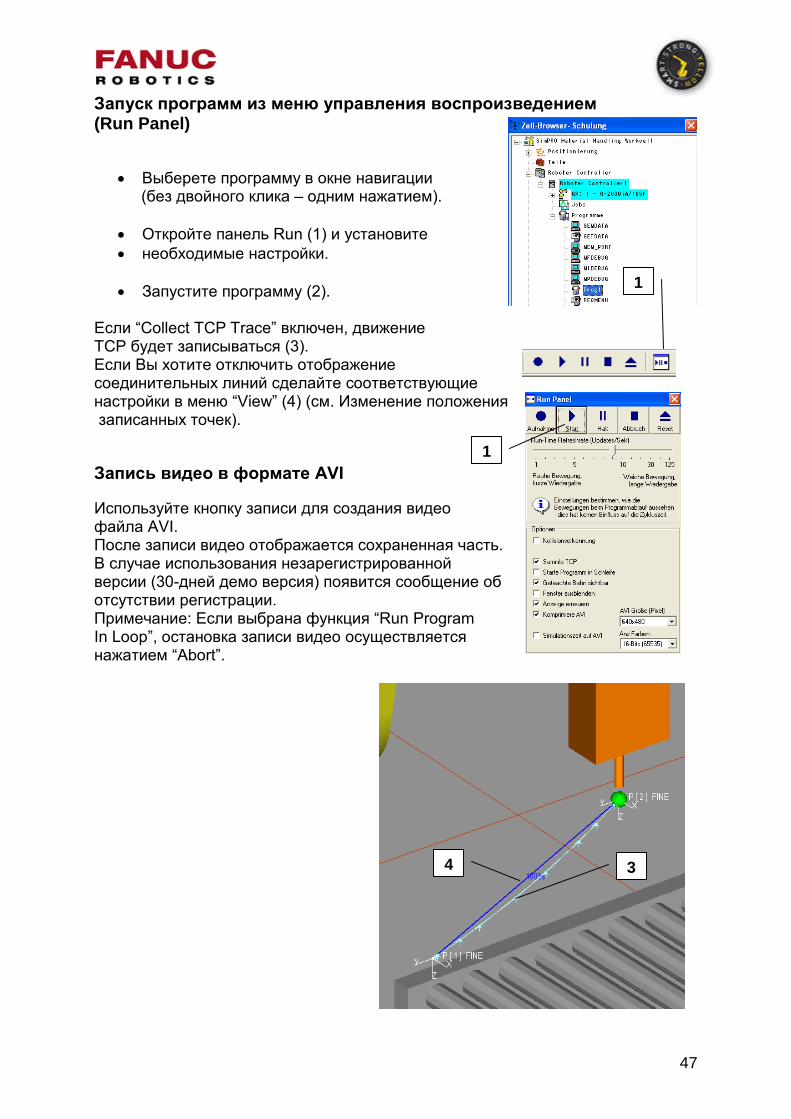
Запуск программ из меню управления воспроизведением (Run Panel)
Выберете программу в окне навигации (без двойного клика – одним нажатием).
Откройте панель Run (1) и установите необходимые настройки.
Запустите программу (2).
Если “Collect TCP Trace” включен, движение TCP будет записываться (3). Если Вы хотите отключить отображение соединительных линий сделайте соответствующие настройки в меню “View” (4) (см. Изменение положения записанных точек).
Запись видео в формате AVI
Используйте кнопку записи для создания видео файла AVI. После записи видео отображается сохраненная часть. В случае использования незарегистрированной версии (30-дней демо версия) появится сообщение об отсутствии регистрации. Примечание: Если выбрана функция “Run Program In Loop”, остановка записи видео осуществляется нажатием “Abort”.
1
1
34
48
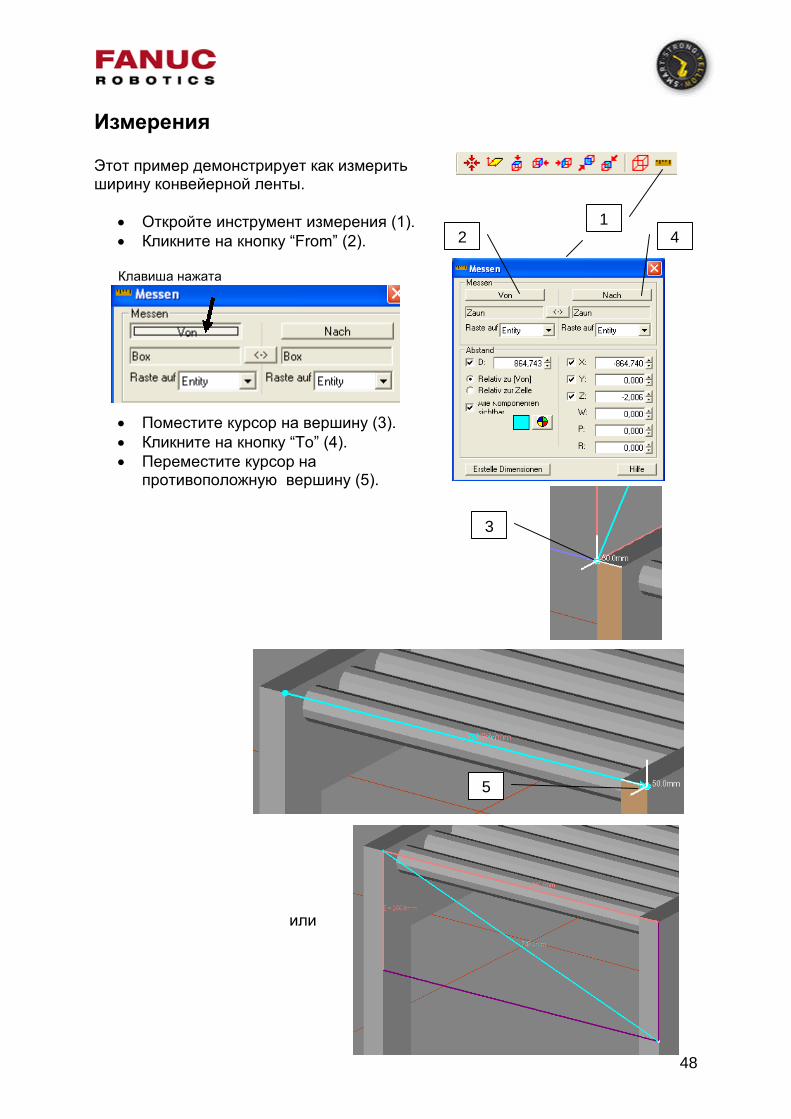
Измерения
Этот пример демонстрирует как измерить ширину конвейерной ленты.
Откройте инструмент измерения (1). Кликните на кнопку “From” (2).
Клавиша нажата
Поместите курсор на вершину (3). Кликните на кнопку “To” (4). Переместите курсор на
противоположную вершину (5).
или
12
3
4
5
49
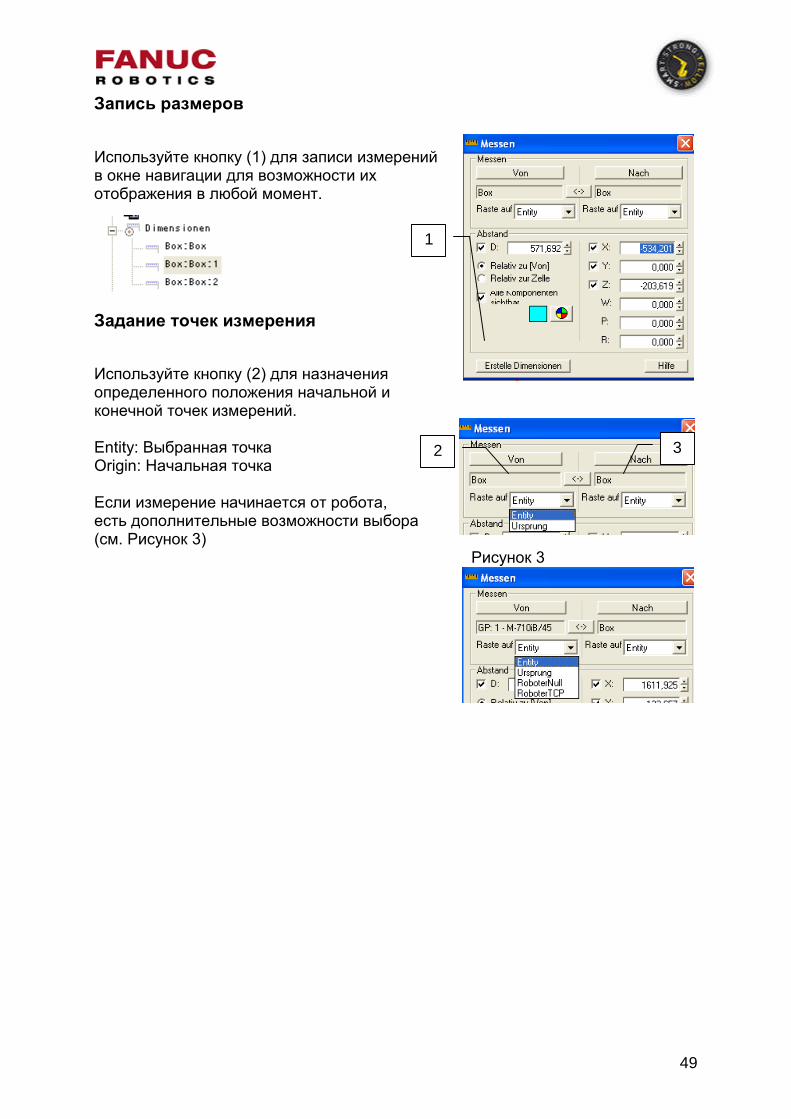
Запись размеров
Используйте кнопку (1) для записи измерений в окне навигации для возможности их отображения в любой момент.
Задание точек измерения
Используйте кнопку (2) для назначения определенного положения начальной и конечной точек измерений.
Entity: Выбранная точка Origin: Начальная точка
Если измерение начинается от робота, есть дополнительные возможности выбора (см. Рисунок 3) Рисунок 3
1
32
50
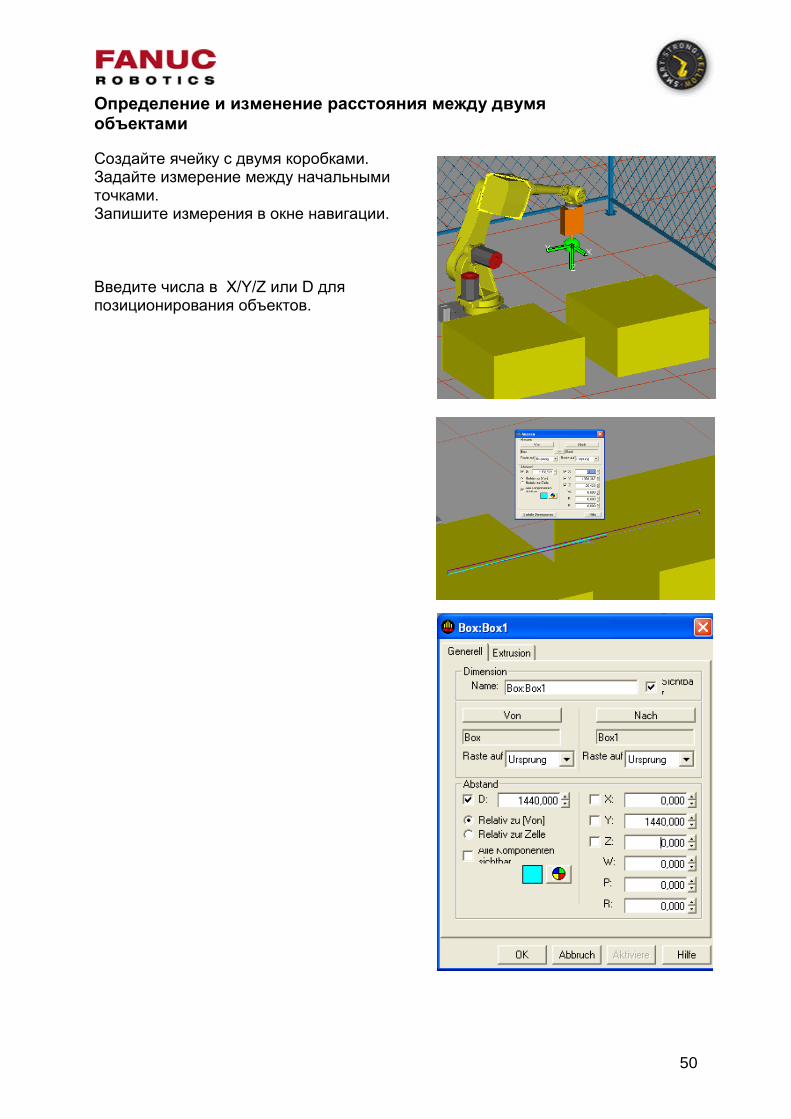
Определение и изменение расстояния между двумя объектами
Создайте ячейку с двумя коробками. Задайте измерение между начальными точками. Запишите измерения в окне навигации.
Введите числа в X/Y/Z или D для позиционирования объектов.
51
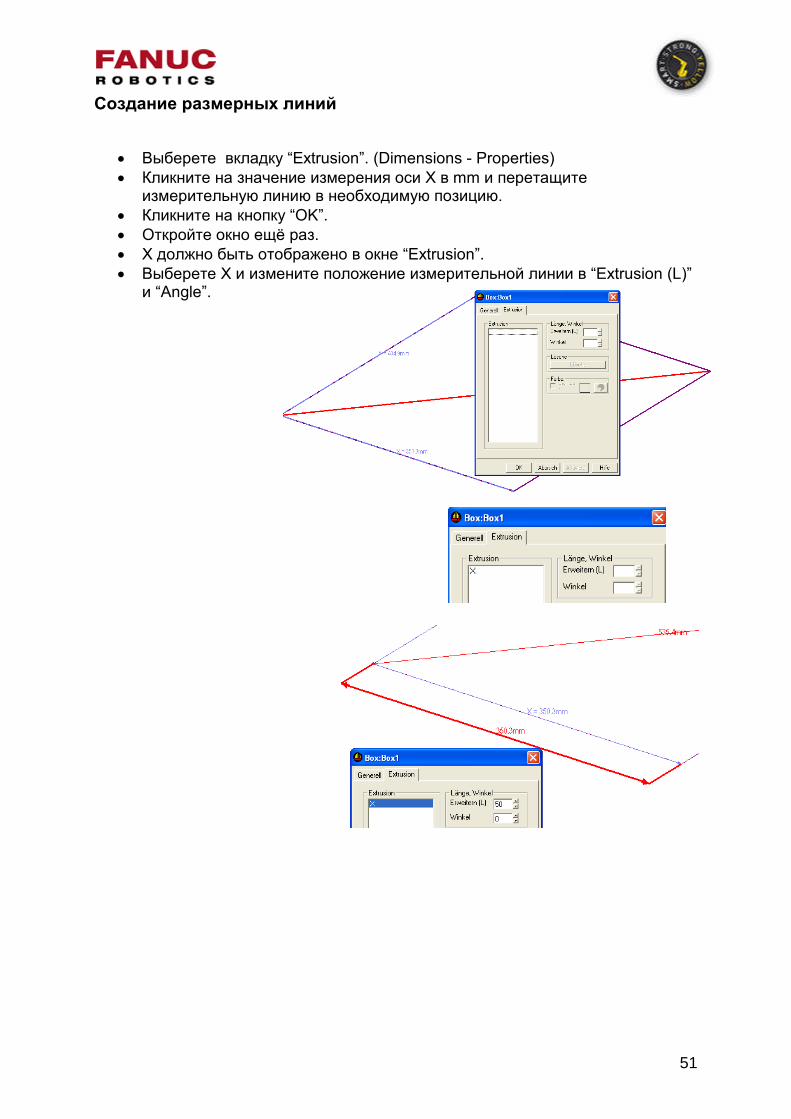
Создание размерных линий
Выберете вкладку “Extrusion”. (Dimensions - Properties) Кликните на значение измерения оси X в mm и перетащите
измерительную линию в необходимую позицию. Кликните на кнопку “OK”. Откройте окно ещё раз. X должно быть отображено в окне “Extrusion”. Выберете X и измените положение измерительной линии в “Extrusion (L)”
и “Angle”.
52
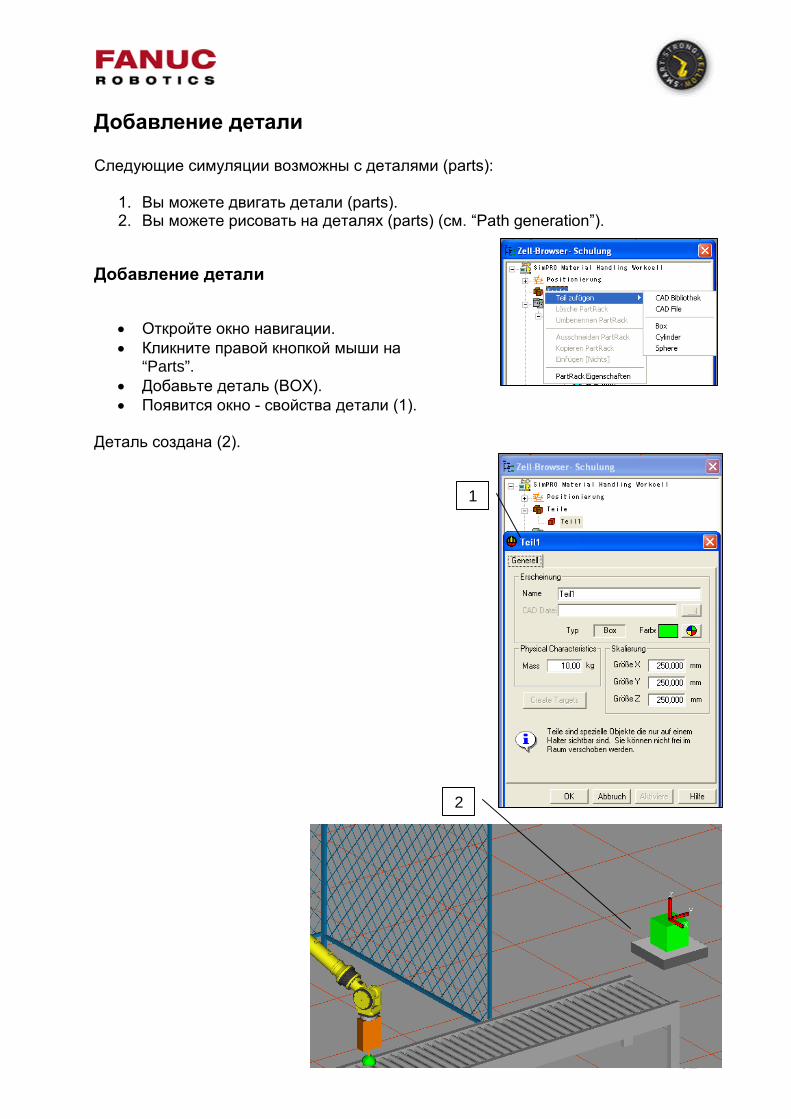
Добавление детали
Следующие симуляции возможны с деталями (parts):
1. Вы можете двигать детали (parts). 2. Вы можете рисовать на деталях (parts) (см. “Path generation”).
Добавление детали
Откройте окно навигации. Кликните правой кнопкой мыши на
“Parts”. Добавьте деталь (BOX). Появится окно - свойства детали (1).
Деталь создана (2).
1
2
53
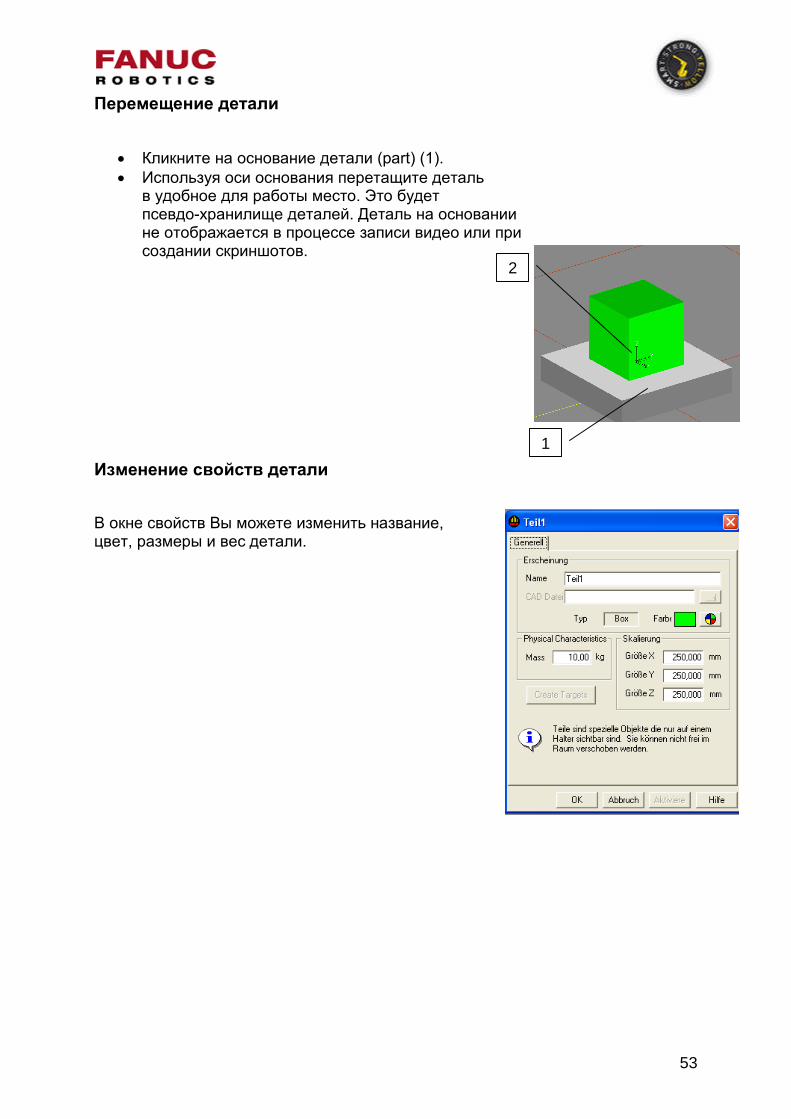
Перемещение детали
Кликните на основание детали (part) (1). Используя оси основания перетащите деталь
в удобное для работы место. Это будет псевдо-хранилище деталей. Деталь на основании не отображается в процессе записи видео или при создании скриншотов.
Изменение свойств детали
В окне свойств Вы можете изменить название, цвет, размеры и вес детали.
1
2
54
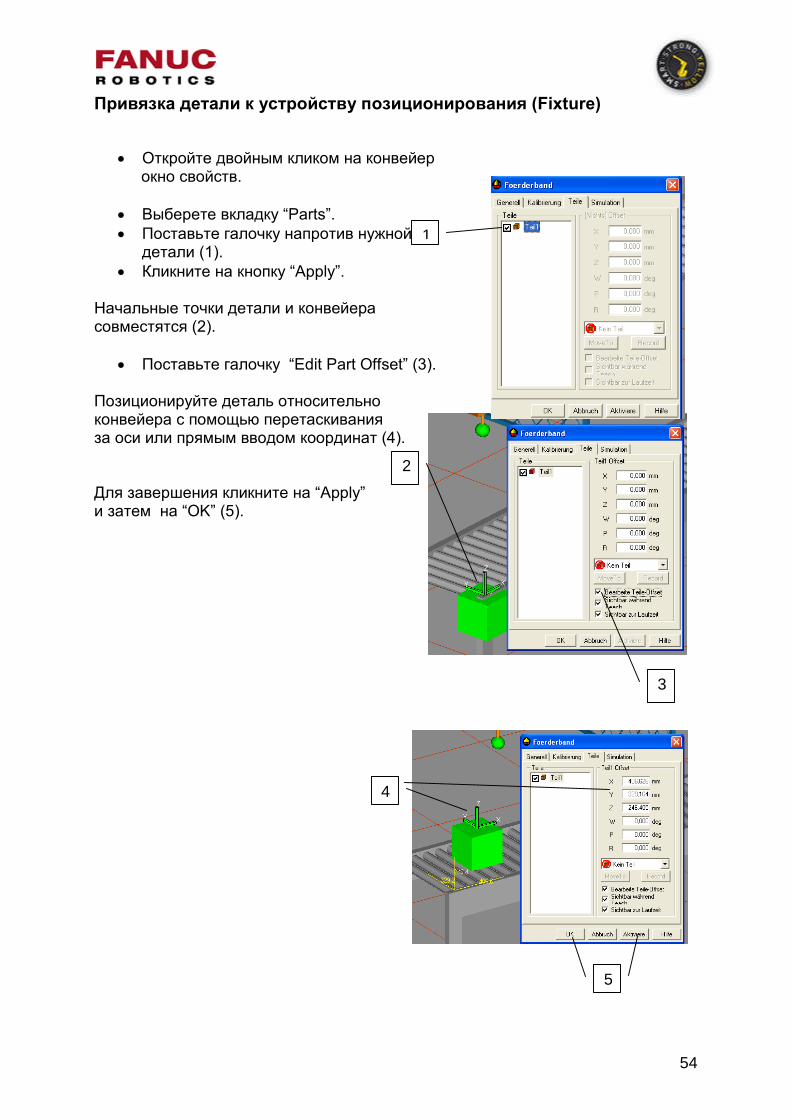
Привязка детали к устройству позиционирования (Fixture)
Откройте двойным кликом на конвейер окно свойств.
Выберете вкладку “Parts”. Поставьте галочку напротив нужной
детали (1). Кликните на кнопку “Apply”.
Начальные точки детали и конвейера совместятся (2).
Поставьте галочку “Edit Part Offset” (3).
Позиционируйте деталь относительно конвейера с помощью перетаскивания за оси или прямым вводом координат (4).
Для завершения кликните на “Apply” и затем на “OK” (5).
2
3
4
1
5
55
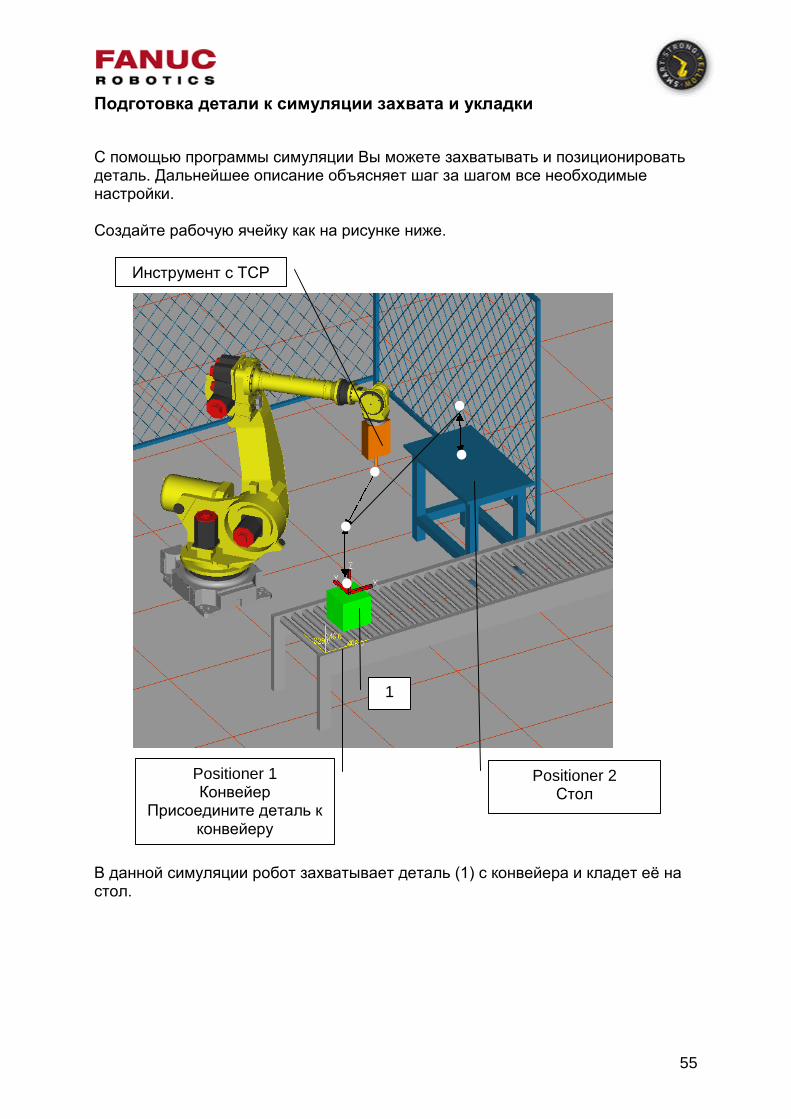
Подготовка детали к симуляции захвата и укладки
С помощью программы симуляции Вы можете захватывать и позиционировать деталь. Дальнейшее описание объясняет шаг за шагом все необходимые настройки.
Создайте рабочую ячейку как на рисунке ниже.
В данной симуляции робот захватывает деталь (1) с конвейера и кладет её на стол.
Positioner 1Конвейер
Присоедините деталь к конвейеру
Positioner 2Стол
Инструмент с TCP
1
56
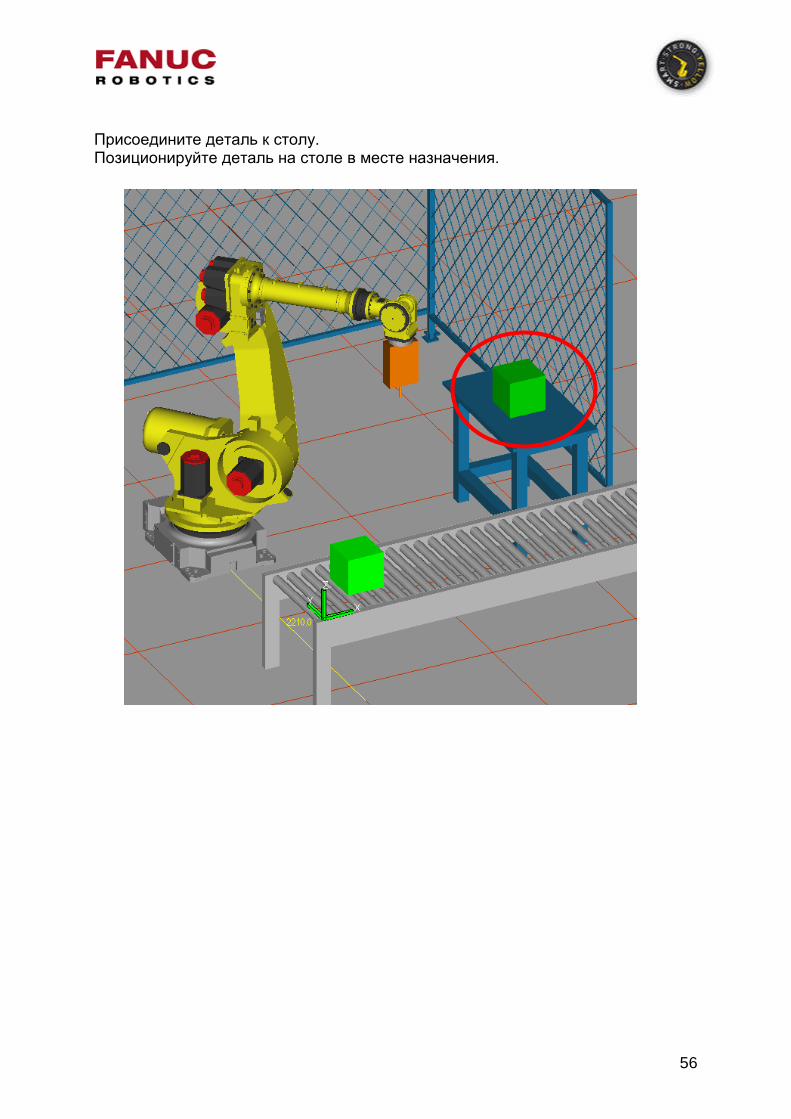
Присоедините деталь к столу. Позиционируйте деталь на столе в месте назначения.
57
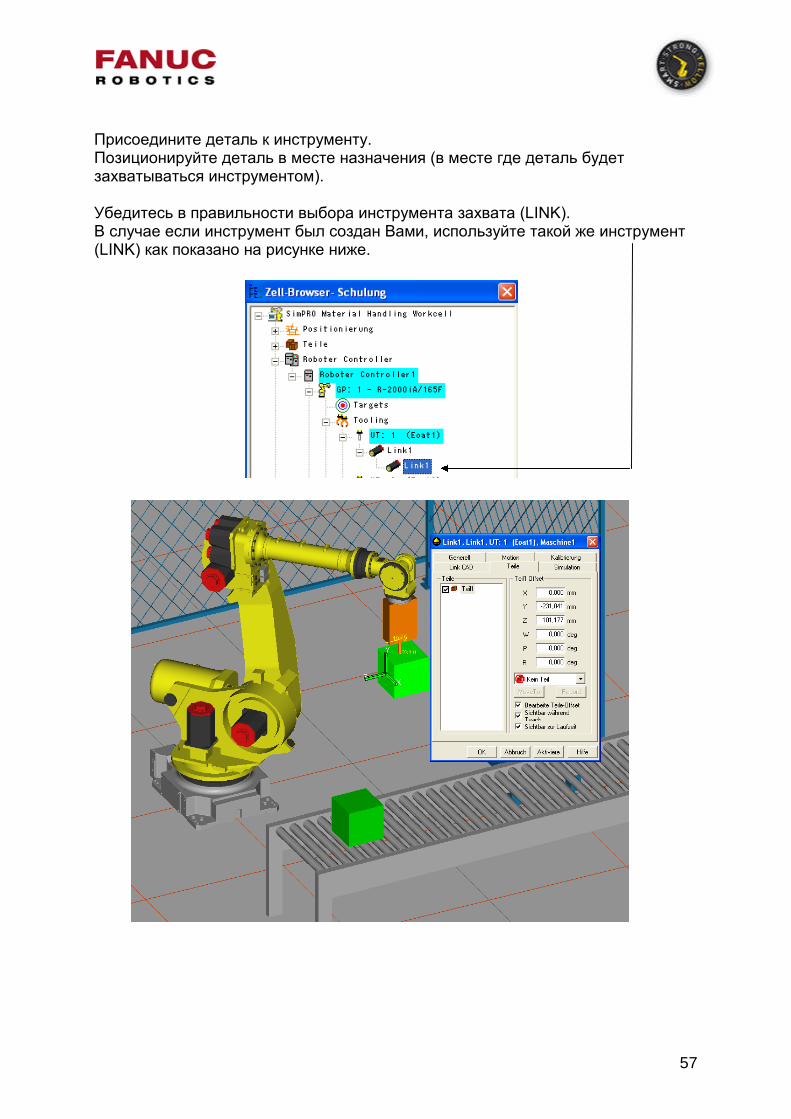
Присоедините деталь к инструменту. Позиционируйте деталь в месте назначения (в месте где деталь будет захватываться инструментом).
Убедитесь в правильности выбора инструмента захвата (LINK). В случае если инструмент был создан Вами, используйте такой же инструмент (LINK) как показано на рисунке ниже.
58
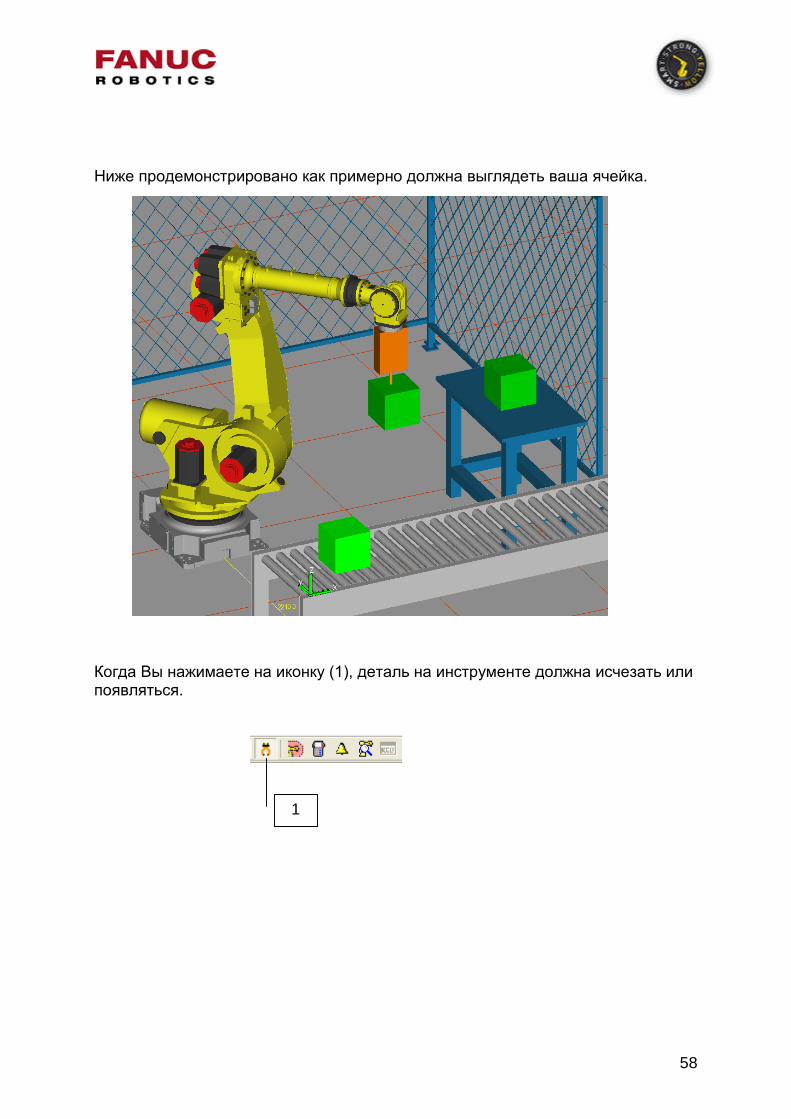
Ниже продемонстрировано как примерно должна выглядеть ваша ячейка.
Когда Вы нажимаете на иконку (1), деталь на инструменте должна исчезать или появляться.
1
59
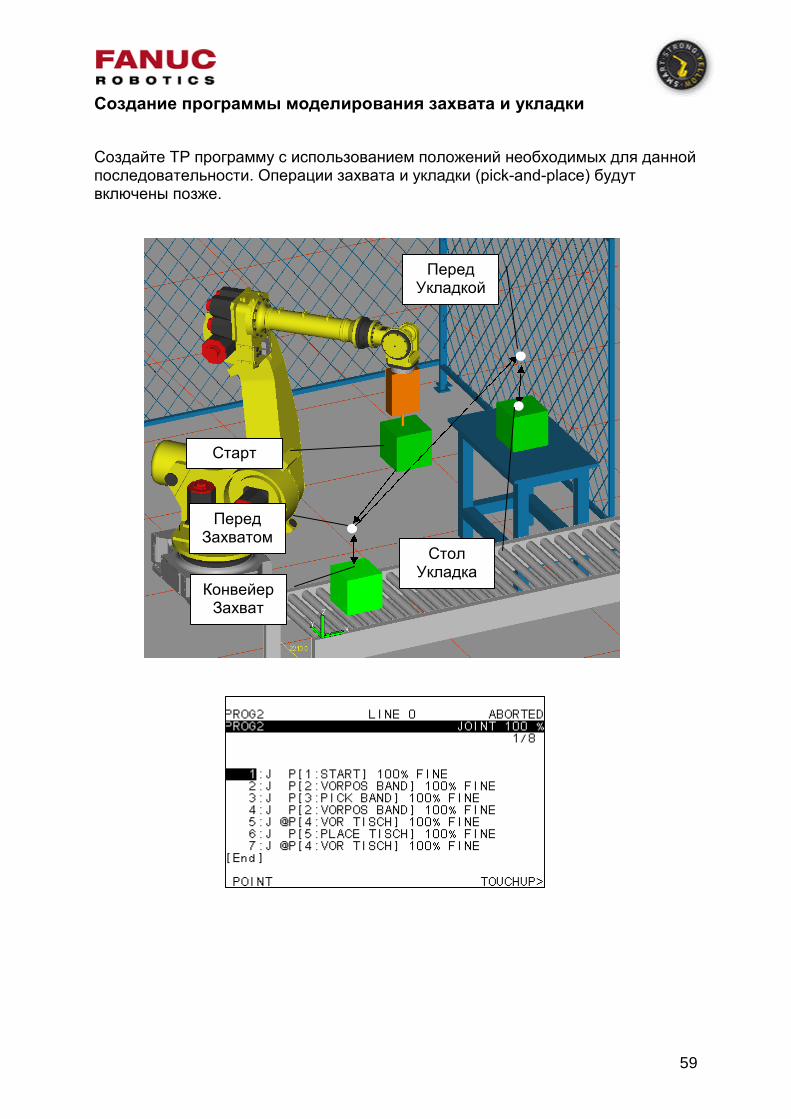
Создание программы моделирования захвата и укладки
Создайте TP программу с использованием положений необходимых для данной последовательности. Операции захвата и укладки (pick-and-place) будут включены позже.
Старт
Перед Захватом
Конвейер Захват
Перед Укладкой
Стол Укладка

60
Вставьте пустые строчки (см. рисунок). Эти линии будут нужны для операций захвата и укладки (pick-and-place).
61
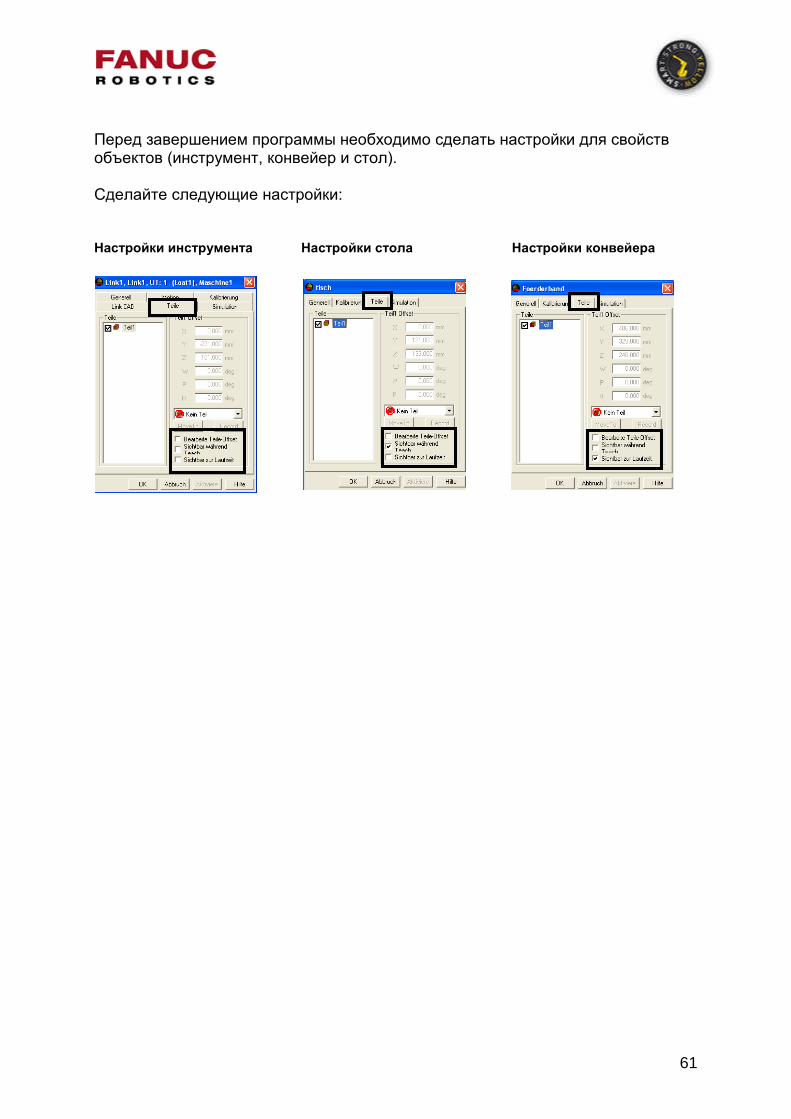
Перед завершением программы необходимо сделать настройки для свойств объектов (инструмент, конвейер и стол).
Сделайте следующие настройки:
Настройки инструмента Настройки стола Настройки конвейера
62
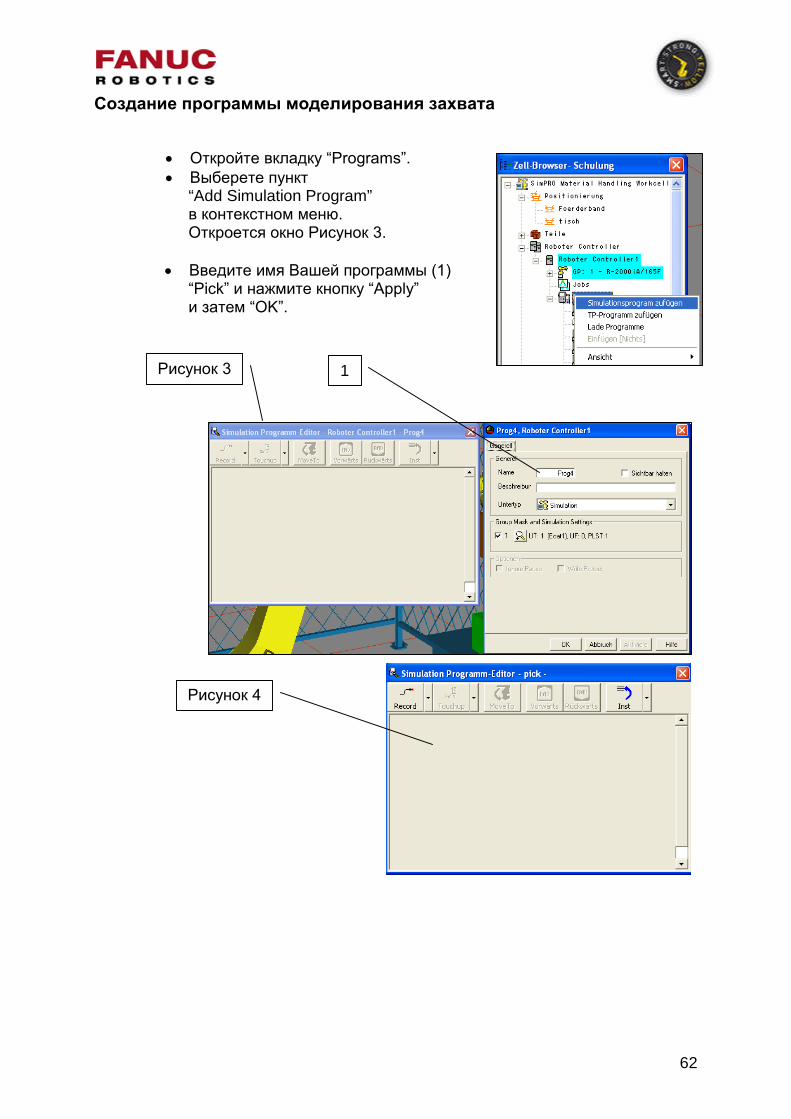
Создание программы моделирования захвата
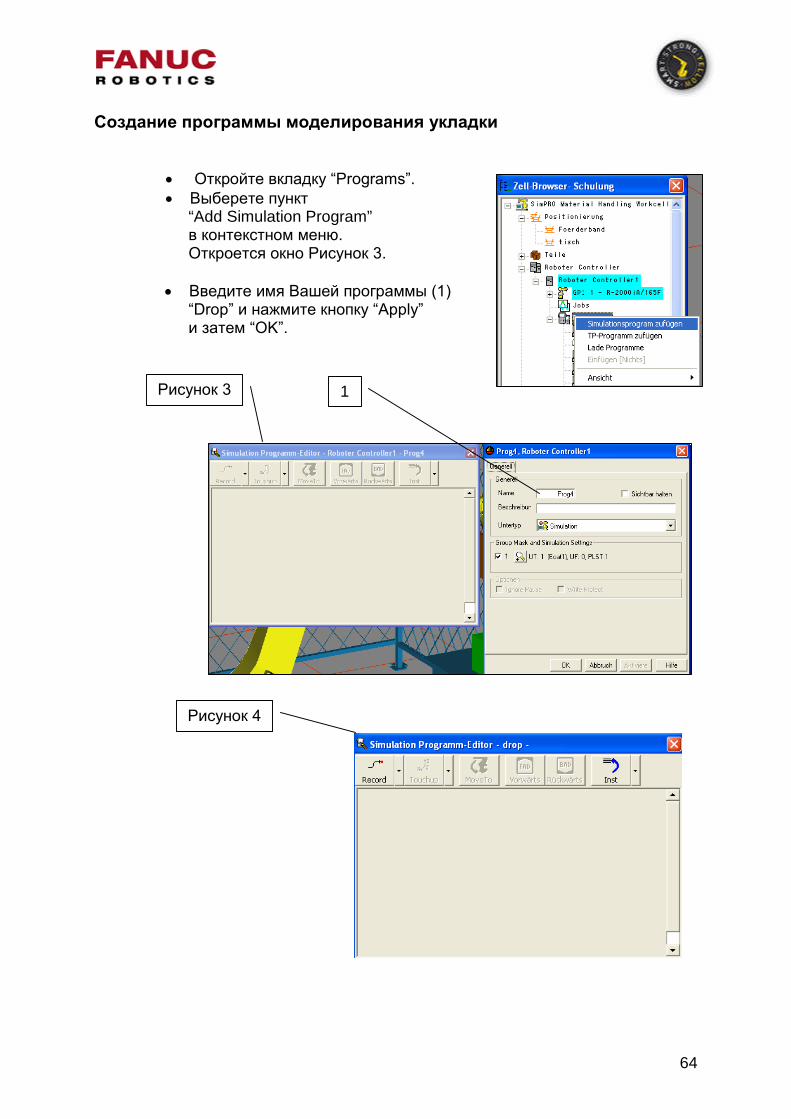
Откройте вкладку “Programs”. Выберете пункт
“Add Simulation Program”в контекстном меню. Откроется окно Рисунок 3.
Введите имя Вашей программы (1) “Pick” и нажмите кнопку “Apply” и затем “OK”.
Рисунок 3 1
Рисунок 4
63
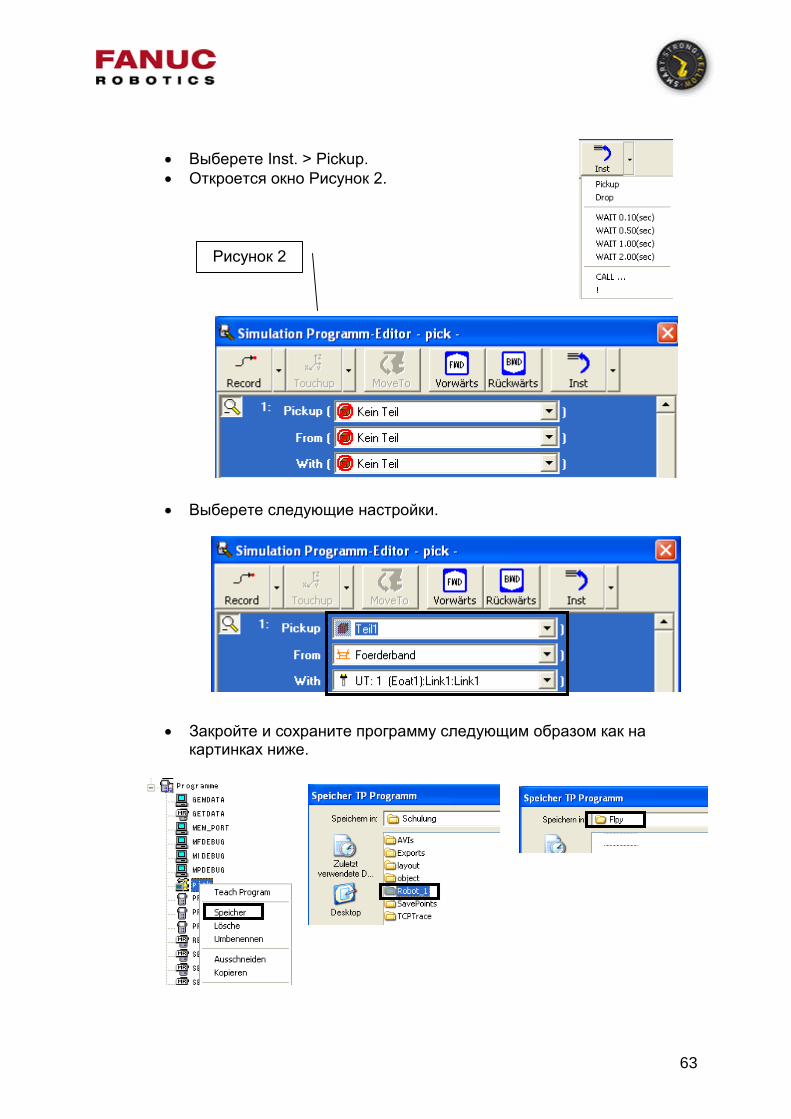
Выберете Inst. > Pickup. Откроется окно Рисунок 2.
Выберете следующие настройки.
Закройте и сохраните программу следующим образом как на картинках ниже.
Рисунок 2
64
Создание программы моделирования укладки
Откройте вкладку “Programs”. Выберете пункт
“Add Simulation Program”в контекстном меню. Откроется окно Рисунок 3.
Введите имя Вашей программы (1) “Drop” и нажмите кнопку “Apply” и затем “OK”.
Рисунок 3 1
Рисунок 4
65
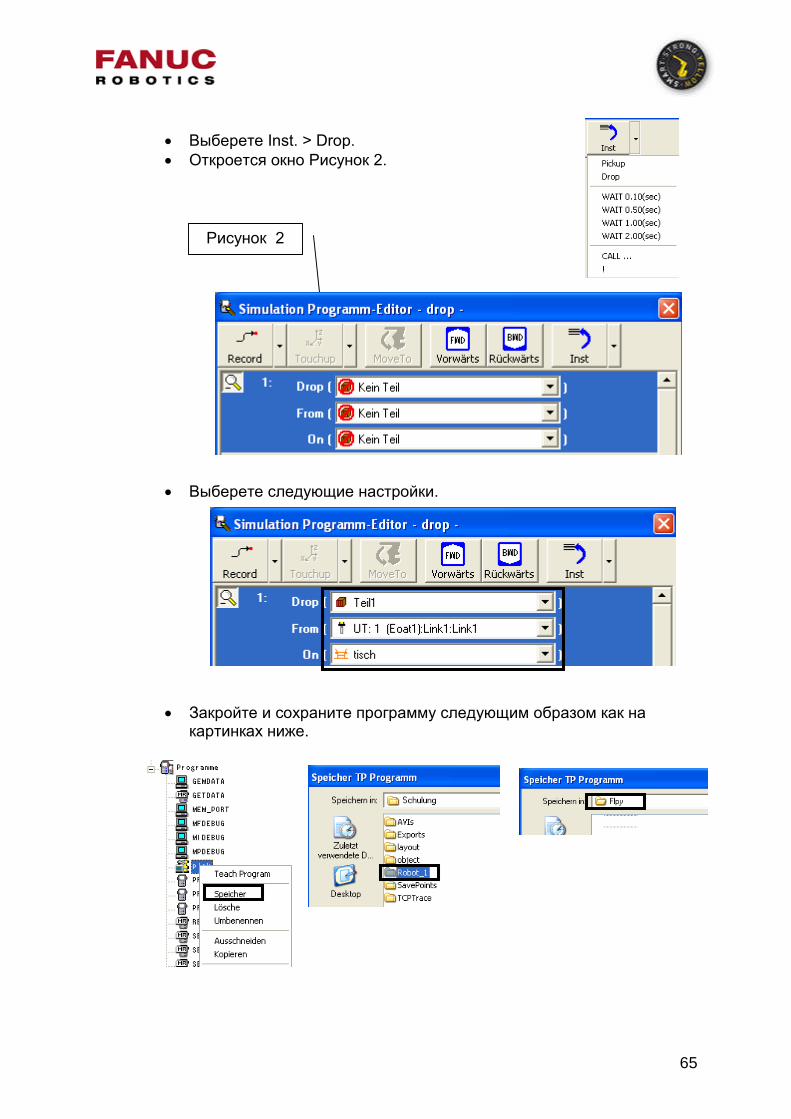
Выберете Inst. > Drop. Откроется окно Рисунок 2.
Выберете следующие настройки.
Закройте и сохраните программу следующим образом как на картинках ниже.
Рисунок 2
66
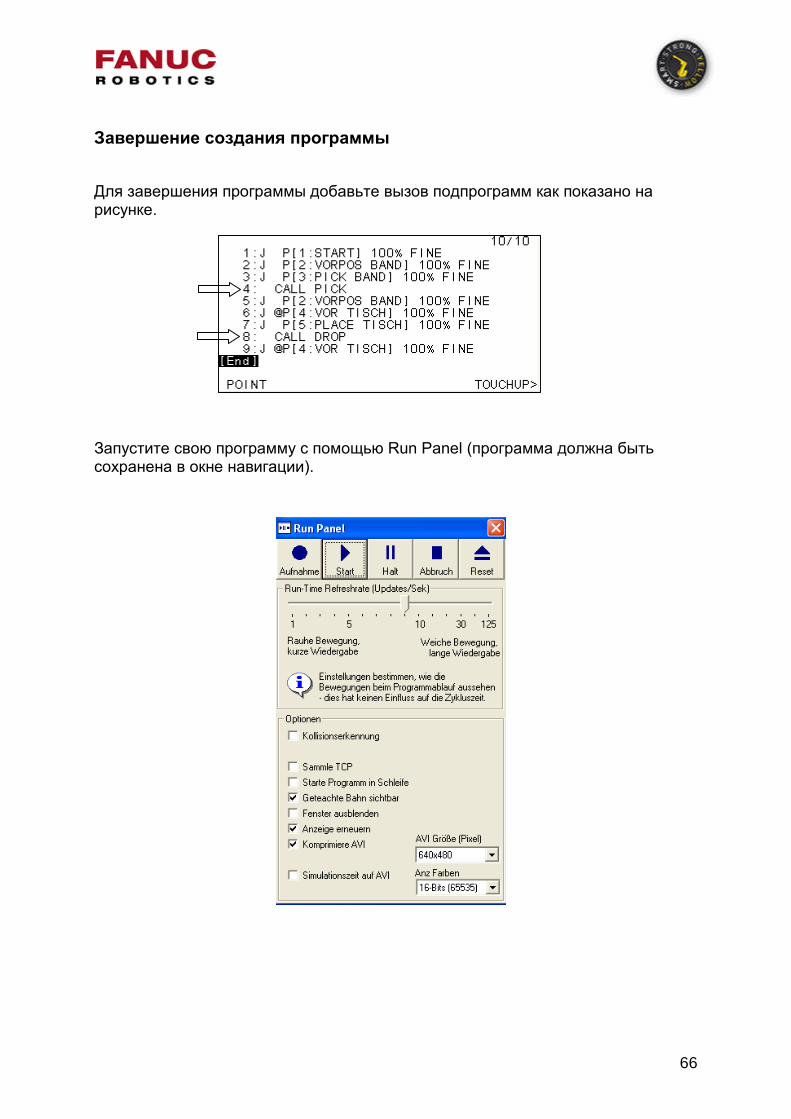
Завершение создания программы
Для завершения программы добавьте вызов подпрограмм как показано на рисунке.
Запустите свою программу с помощью Run Panel (программа должна быть сохранена в окне навигации).
67
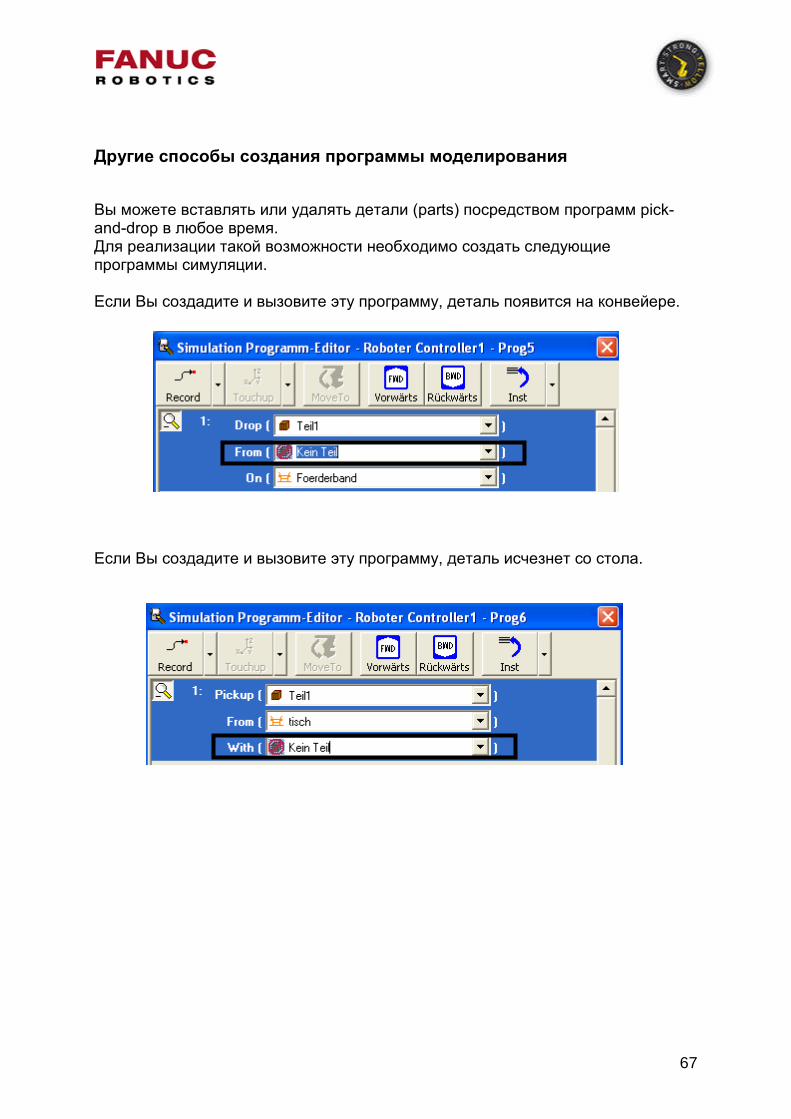
Другие способы создания программы моделирования
Вы можете вставлять или удалять детали (parts) посредством программ pick-and-drop в любое время. Для реализации такой возможности необходимо создать следующие программы симуляции.
Если Вы создадите и вызовите эту программу, деталь появится на конвейере.
Если Вы создадите и вызовите эту программу, деталь исчезнет со стола.
68
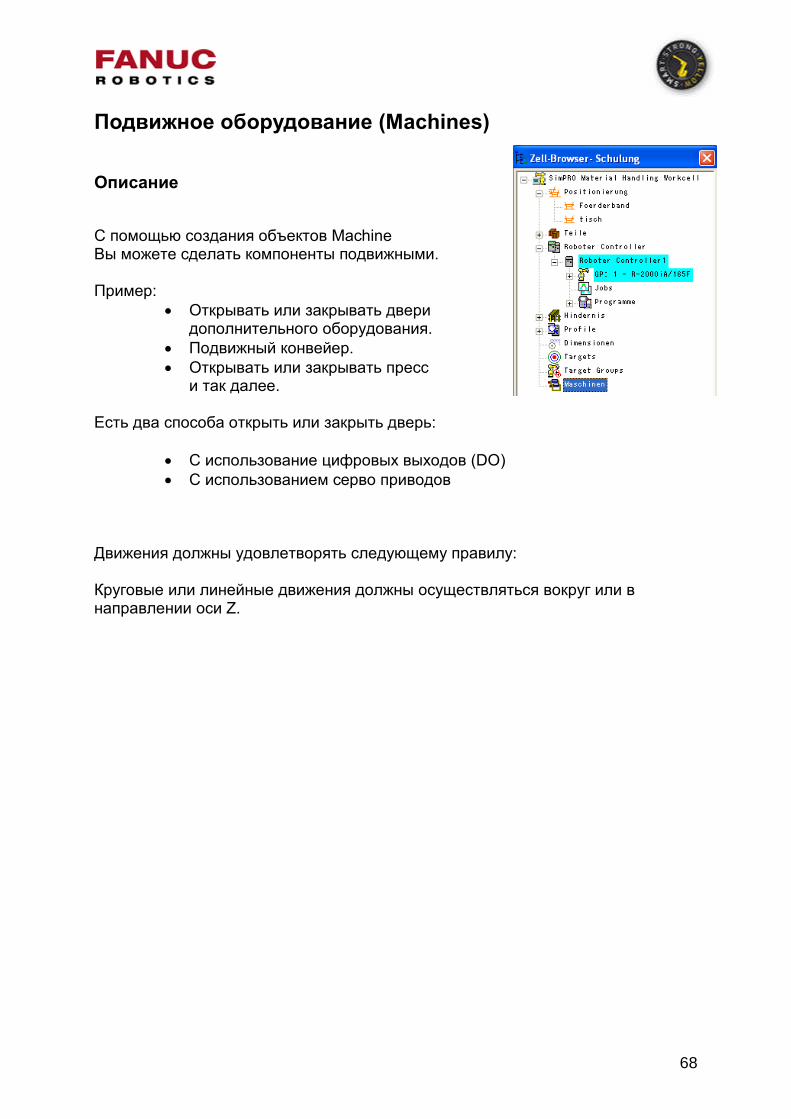
Подвижное оборудование (Machines)
Описание
С помощью создания объектов Machine Вы можете сделать компоненты подвижными.
Пример: Открывать или закрывать двери
дополнительного оборудования. Подвижный конвейер. Открывать или закрывать пресс
и так далее.
Есть два способа открыть или закрыть дверь:
С использование цифровых выходов (DO) С использованием серво приводов
Движения должны удовлетворять следующему правилу:
Круговые или линейные движения должны осуществляться вокруг или в направлении оси Z.
69
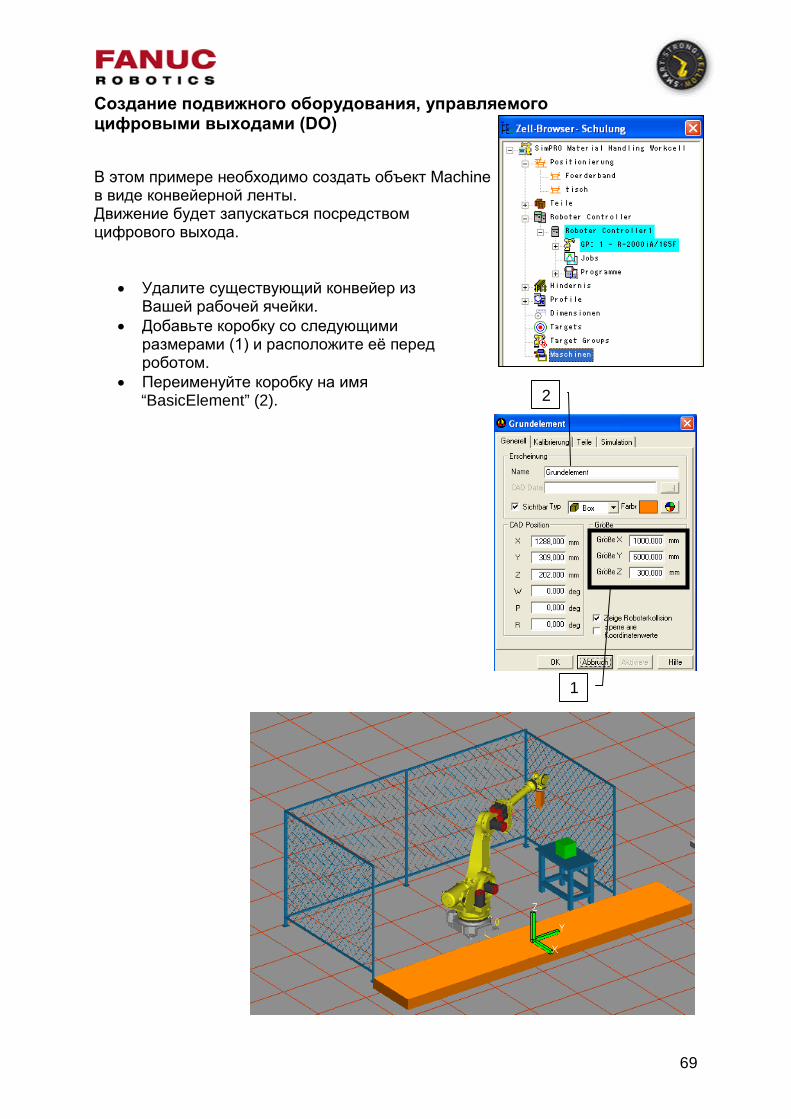
Создание подвижного оборудования, управляемого цифровыми выходами (DO)
В этом примере необходимо создать объект Machine в виде конвейерной ленты. Движение будет запускаться посредством цифрового выхода.
Удалите существующий конвейер из Вашей рабочей ячейки.
Добавьте коробку со следующими размерами (1) и расположите её перед роботом.
Переименуйте коробку на имя “BasicElement” (2).
1
2
70
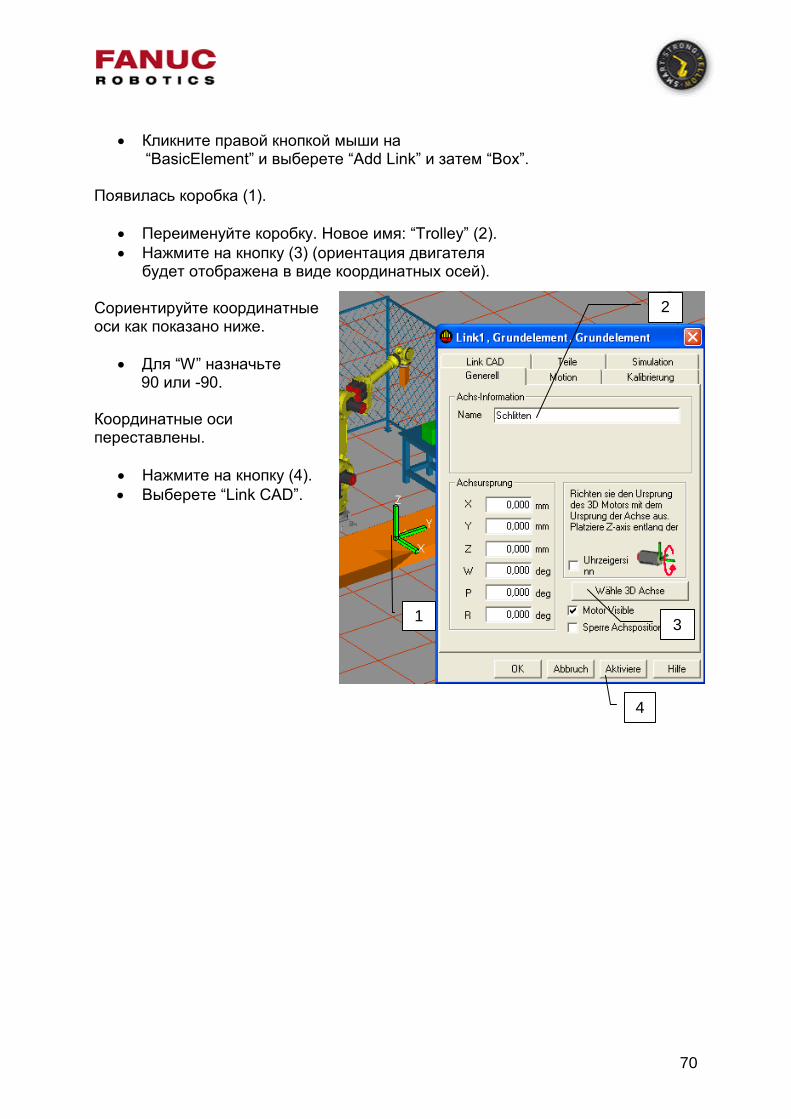
Кликните правой кнопкой мыши на “BasicElement” и выберете “Add Link” и затем “Box”.
Появилась коробка (1).
Переименуйте коробку. Новое имя: “Trolley” (2). Нажмите на кнопку (3) (ориентация двигателя
будет отображена в виде координатных осей).
Сориентируйте координатные оси как показано ниже.
Для “W” назначьте 90 или -90.
Координатные оси переставлены.
Нажмите на кнопку (4). Выберете “Link CAD”.
1
2
3
4
71
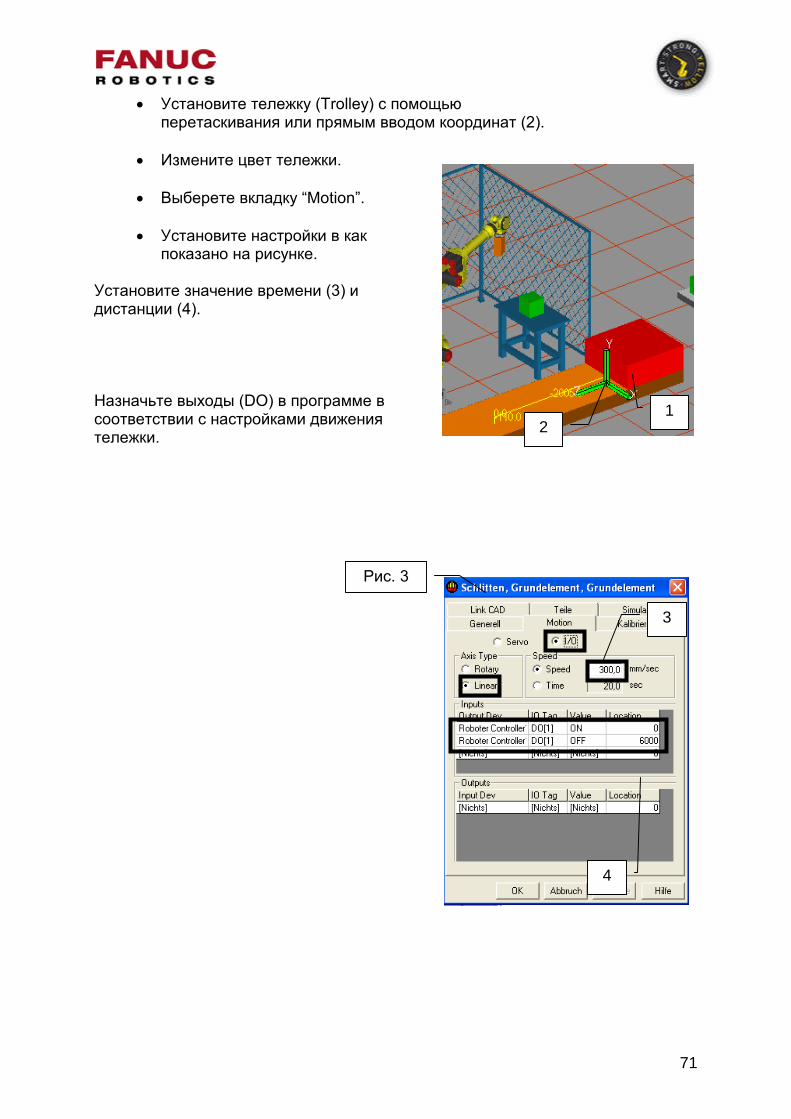
Установите тележку (Trolley) с помощью перетаскивания или прямым вводом координат (2).
Измените цвет тележки.
Выберете вкладку “Motion”.
Установите настройки в как показано на рисунке.
Установите значение времени (3) и дистанции (4).
Назначьте выходы (DO) в программе в соответствии с настройками движения тележки.
1
Рис. 3
3
4
2
72
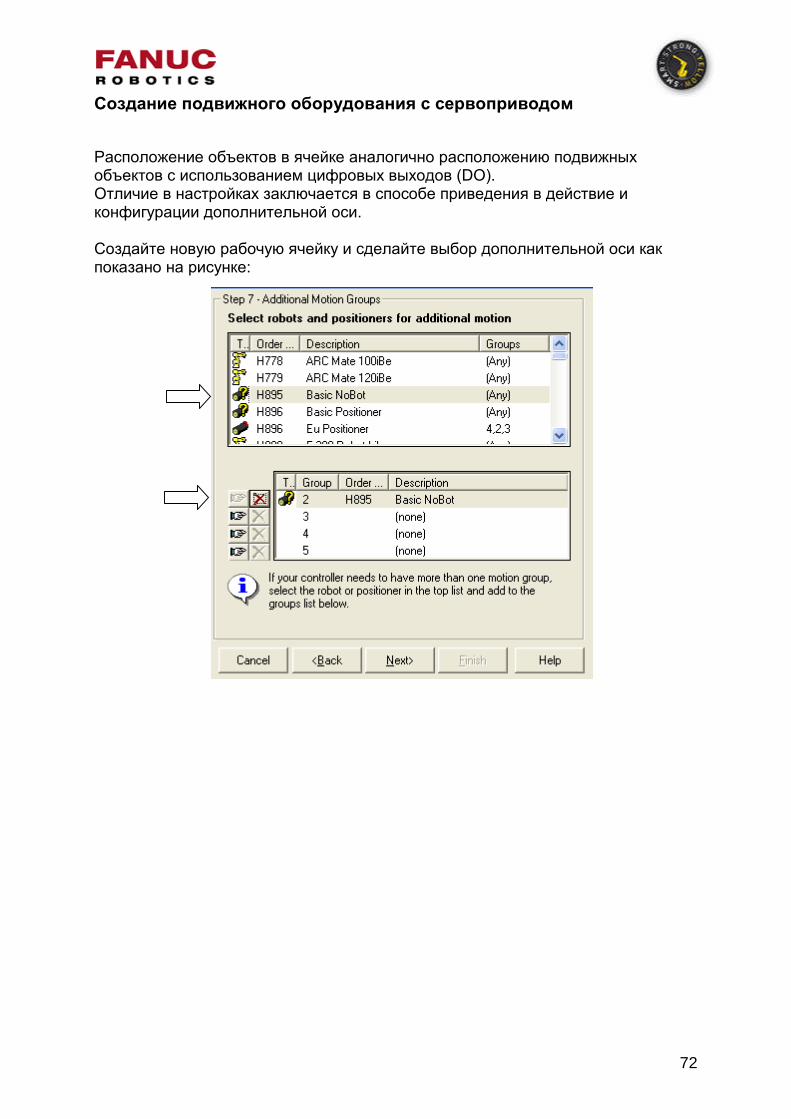
Создание подвижного оборудования с сервоприводом
Расположение объектов в ячейке аналогично расположению подвижных объектов с использованием цифровых выходов (DO). Отличие в настройках заключается в способе приведения в действие и конфигурации дополнительной оси.
Создайте новую рабочую ячейку и сделайте выбор дополнительной оси как показано на рисунке:
73
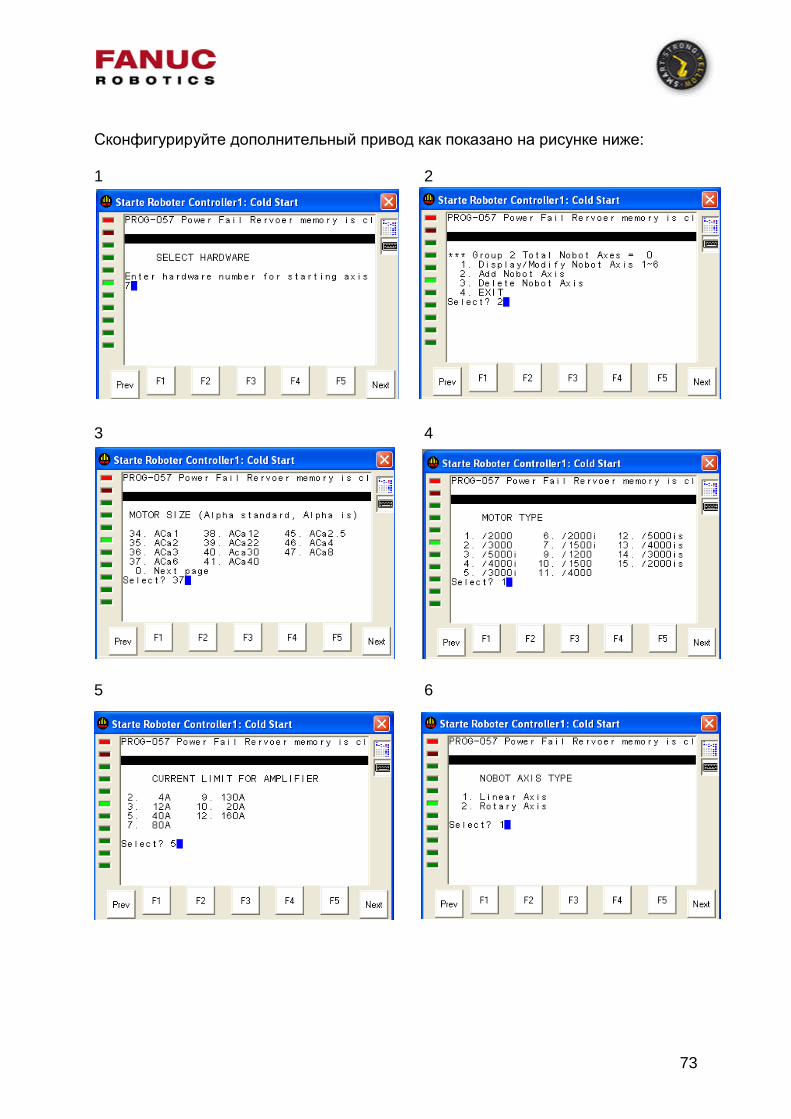
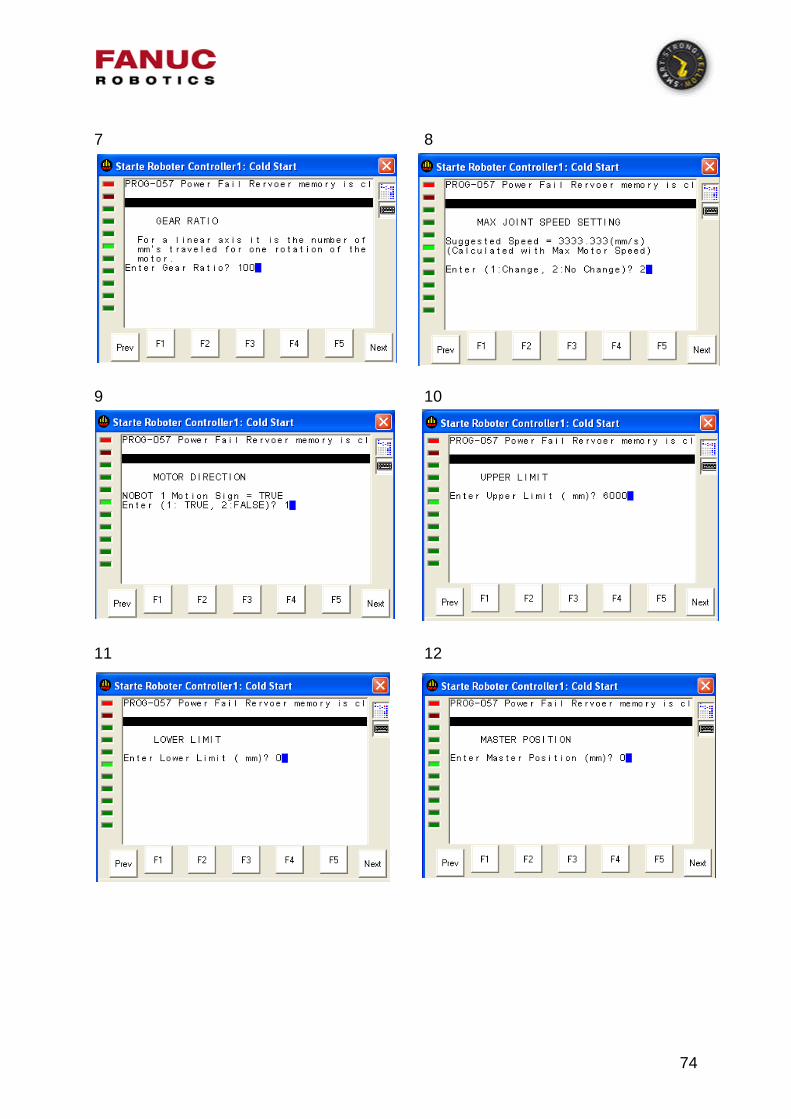
Сконфигурируйте дополнительный привод как показано на рисунке ниже:
1 2
3 4
5 6
74
7 8
9 10
11 12
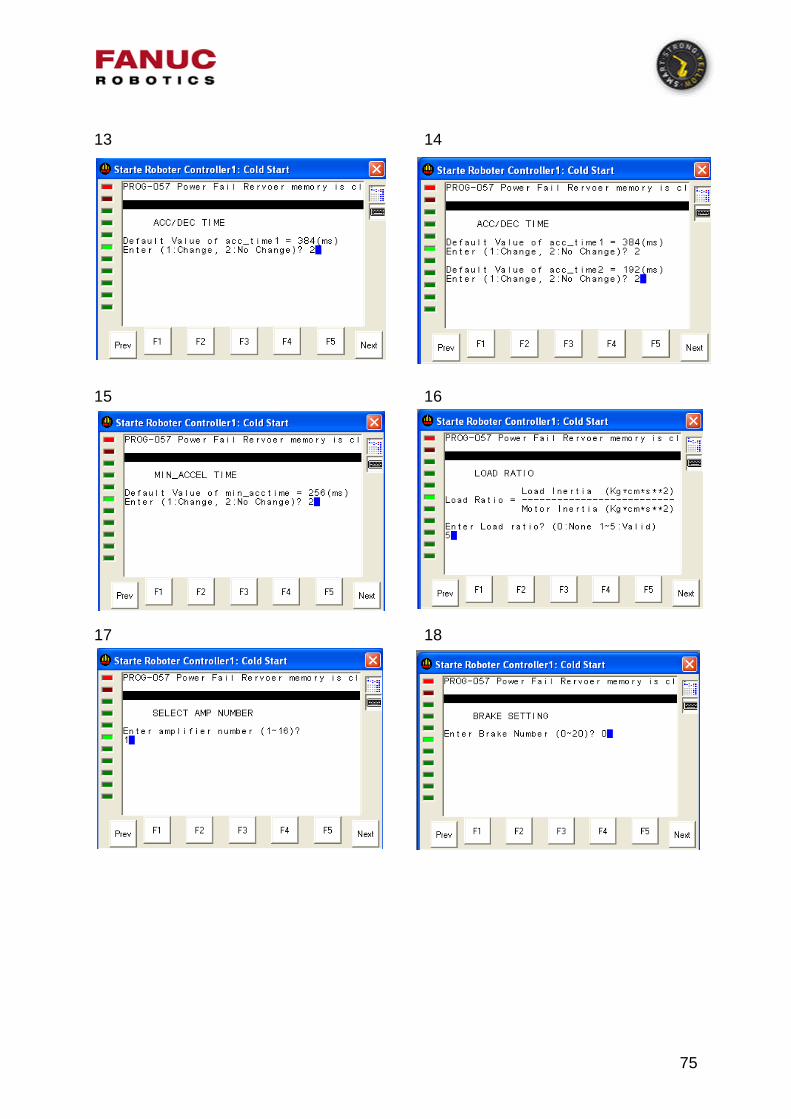
75
13 14
15 16
17 18
76
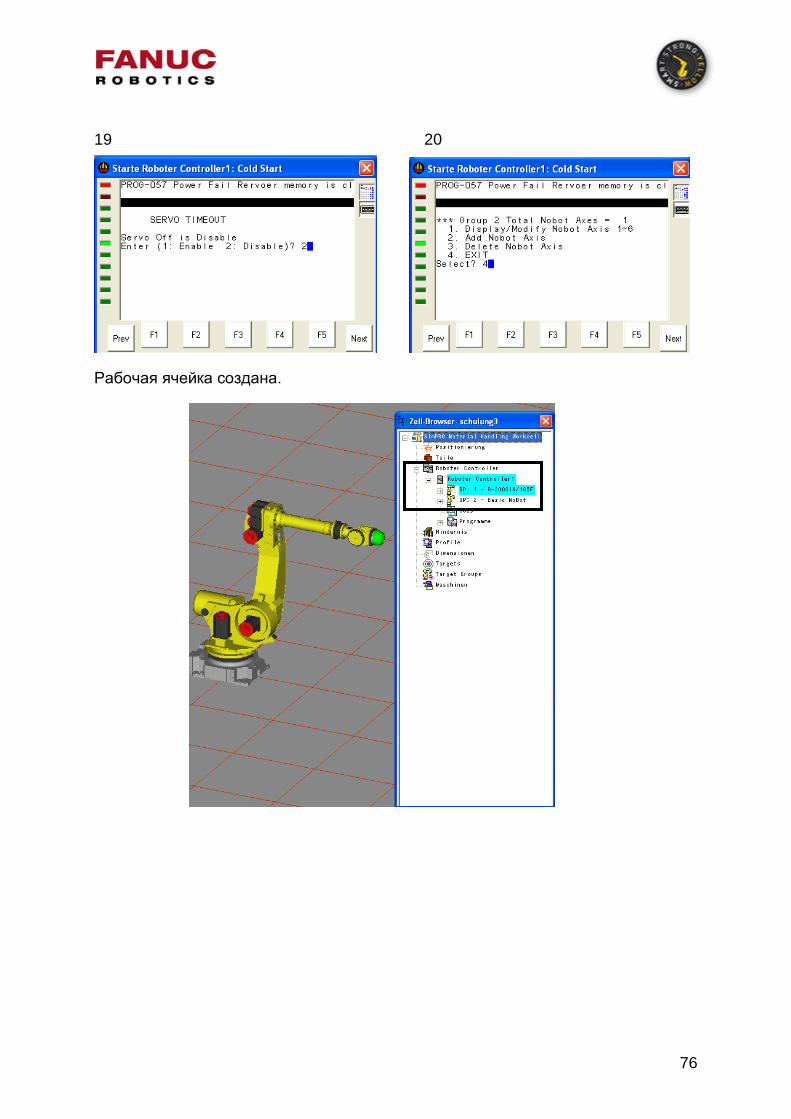
19 20
Рабочая ячейка создана.
77
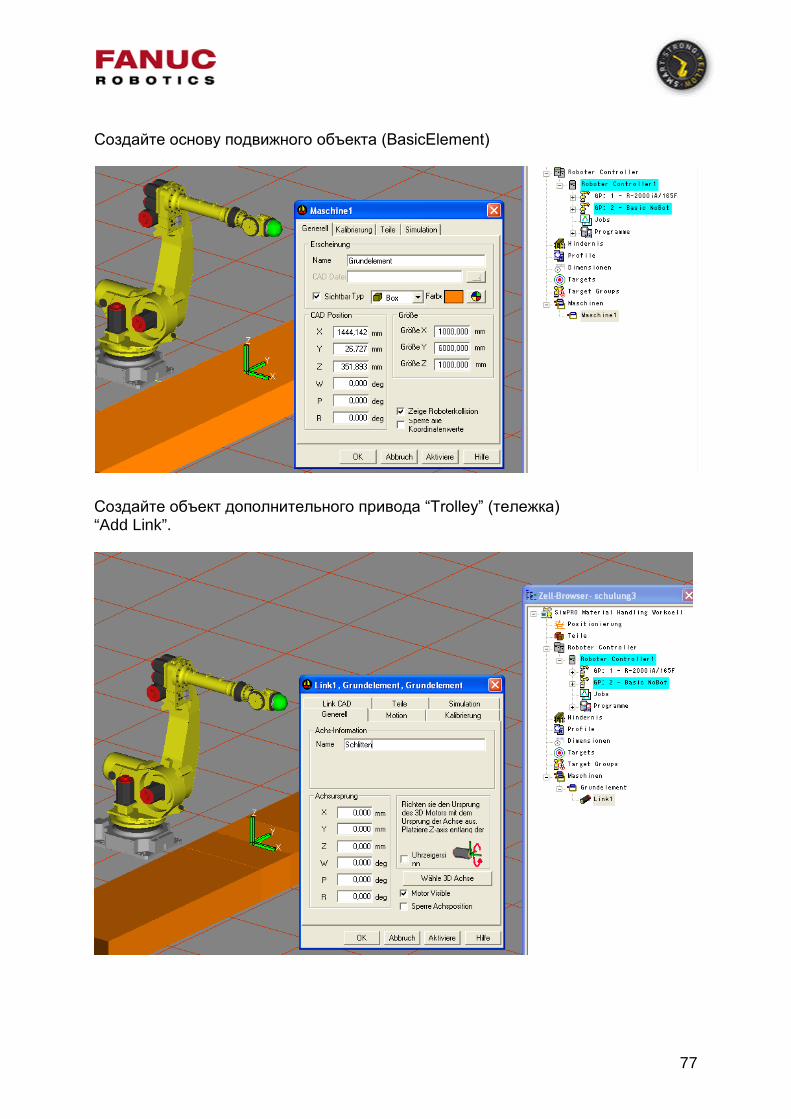
Создайте основу подвижного объекта (BasicElement)
Создайте объект дополнительного привода “Trolley” (тележка) “Add Link”.
78
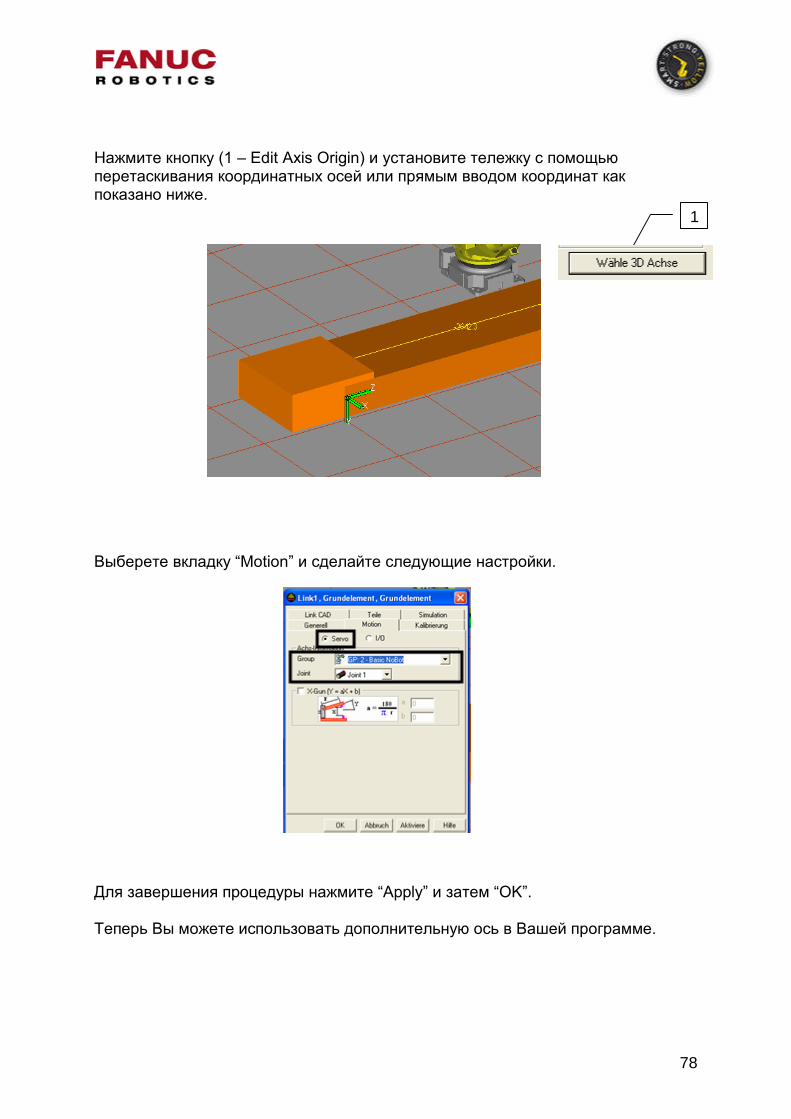
Нажмите кнопку (1 – Edit Axis Origin) и установите тележку с помощью перетаскивания координатных осей или прямым вводом координат как показано ниже.
Выберете вкладку “Motion” и сделайте следующие настройки.
Для завершения процедуры нажмите “Apply” и затем “OK”.
Теперь Вы можете использовать дополнительную ось в Вашей программе.
1

79
Замена робота в существующей ячейке
Откройте окно свойств робота и нажмите на кнопку (1 – Serialize Robot). Выберете желаемую модель робота в окне создания проекта. Нажмите на кнопку “Apply”. Установлен новый робот. Все данные, за исключением программ TP восстановлены. Вы можете скопировать (2) и вставить (3) TP программы.
После процедуры копирования, Вы можете загружать программы в пульт управления без необходимости их переобучения.
2
3
1
80
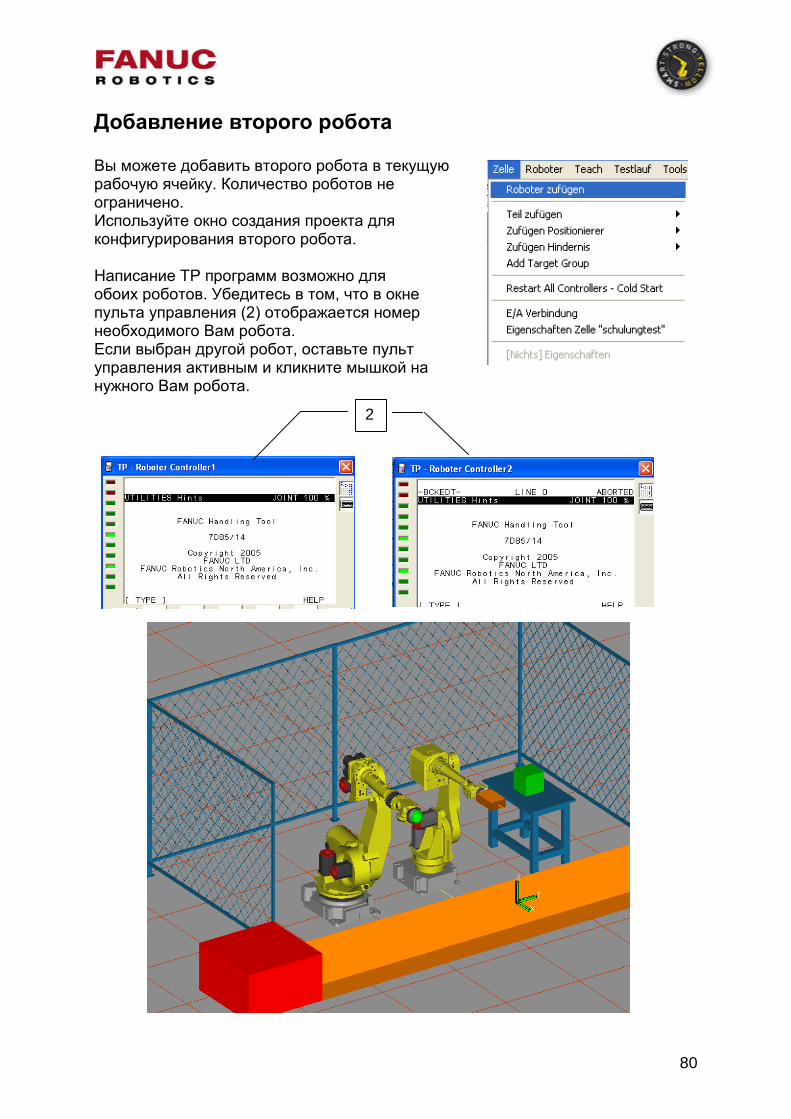
Добавление второго робота
Вы можете добавить второго робота в текущую рабочую ячейку. Количество роботов не ограничено. Используйте окно создания проекта для конфигурирования второго робота.
Написание TP программ возможно для обоих роботов. Убедитесь в том, что в окне пульта управления (2) отображается номер необходимого Вам робота. Если выбран другой робот, оставьте пульт управления активным и кликните мышкой на нужного Вам робота.
2

81
Автоматическое генерирование траектории
Описание
Используйте графическую функцию CAD-To-Path (1) для автоматического генерирования программы по заданной траектории. Графическая функция активна только с деталями Parts. Вы можете выбрать между следующими вариантами:
Edge line – Краевая линия (2) Freehand line – Свободная линия (3) Surface fit line – Линия на поверхности
(выступ на поверхности) (4) Curve - Кривая (5)
3
4
5
2 3
4 5
1
2
82
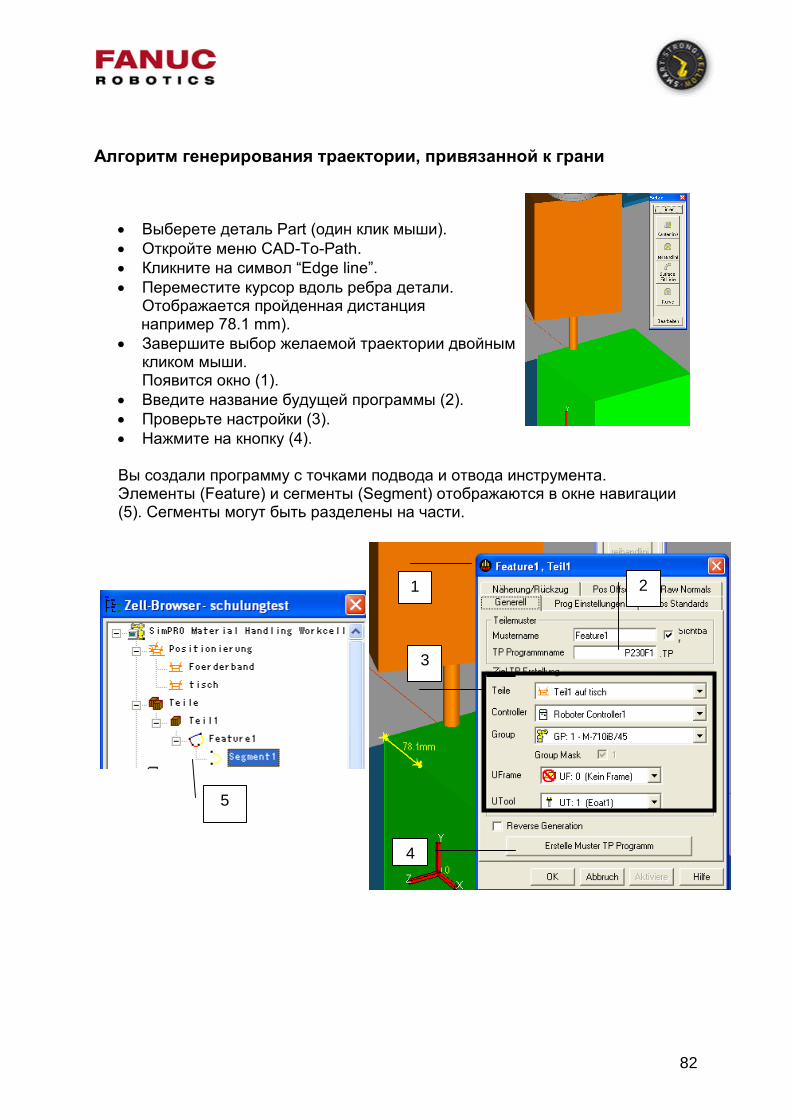
Алгоритм генерирования траектории, привязанной к грани
Выберете деталь Part (один клик мыши). Откройте меню CAD-To-Path. Кликните на символ “Edge line”. Переместите курсор вдоль ребра детали.
Отображается пройденная дистанция например 78.1 mm).
Завершите выбор желаемой траектории двойным кликом мыши. Появится окно (1).
Введите название будущей программы (2). Проверьте настройки (3). Нажмите на кнопку (4).
Вы создали программу с точками подвода и отвода инструмента. Элементы (Feature) и сегменты (Segment) отображаются в окне навигации (5). Сегменты могут быть разделены на части.
1
3
4
2
5
83
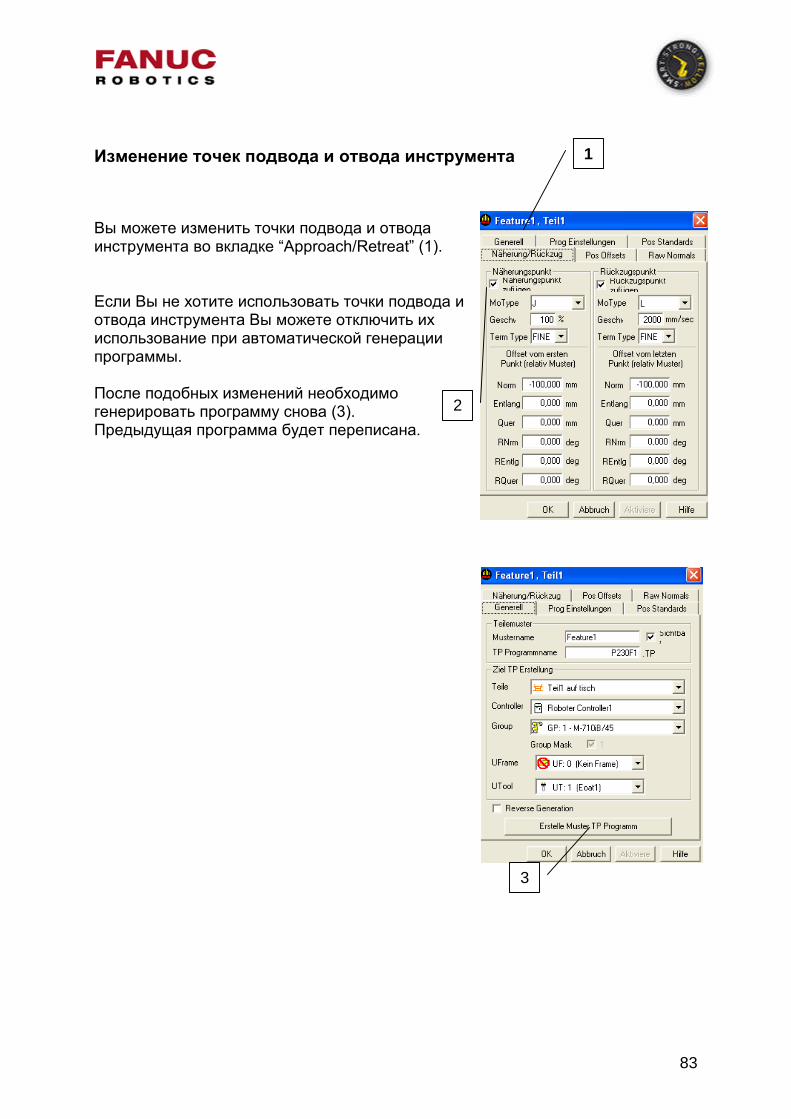
Изменение точек подвода и отвода инструмента
Вы можете изменить точки подвода и отвода инструмента во вкладке “Approach/Retreat” (1).
Если Вы не хотите использовать точки подвода и отвода инструмента Вы можете отключить их использование при автоматической генерации программы.
После подобных изменений необходимо генерировать программу снова (3). Предыдущая программа будет переписана.
1
2
3
84
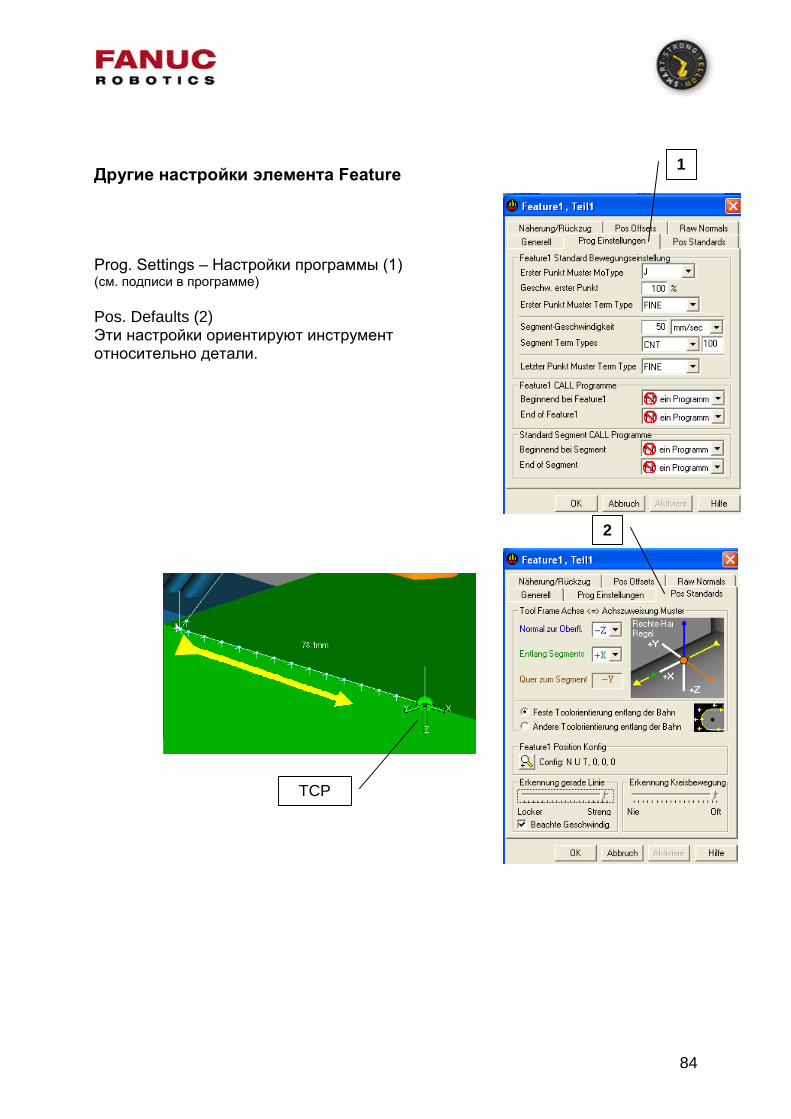
Другие настройки элемента Feature
Prog. Settings – Настройки программы (1) (см. подписи в программе)
Pos. Defaults (2)Эти настройки ориентируют инструмент относительно детали.
TCP
1
2
85
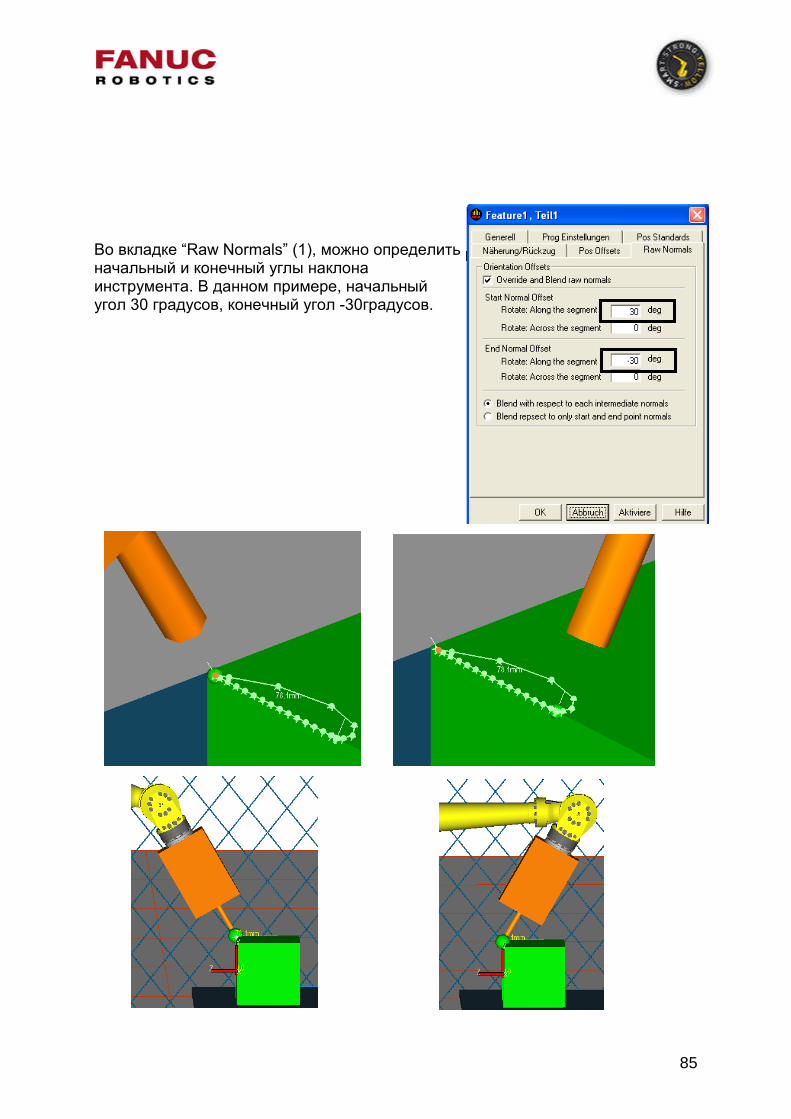
Во вкладке “Raw Normals” (1), можно определить начальный и конечный углы наклона инструмента. В данном примере, начальный угол 30 градусов, конечный угол -30градусов.
86
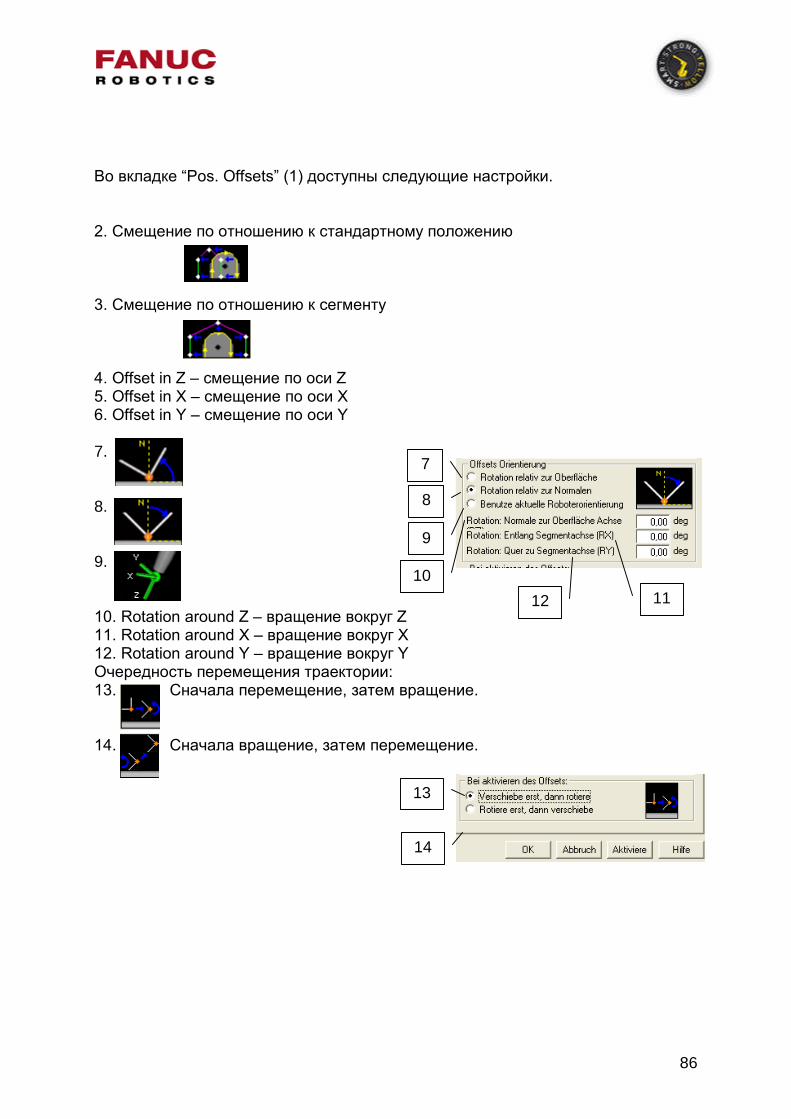
Во вкладке “Pos. Offsets” (1) доступны следующие настройки.
2. Смещение по отношению к стандартному положению
3. Смещение по отношению к сегменту
4. Offset in Z – смещение по оси Z 5. Offset in X – смещение по оси X 6. Offset in Y – смещение по оси Y
7.
8.
9.
10. Rotation around Z – вращение вокруг Z 11. Rotation around X – вращение вокруг X 12. Rotation around Y – вращение вокруг Y Очередность перемещения траектории: 13. Сначала перемещение, затем вращение.
14. Сначала вращение, затем перемещение.
7
8
9
12
13
14
10
11
87
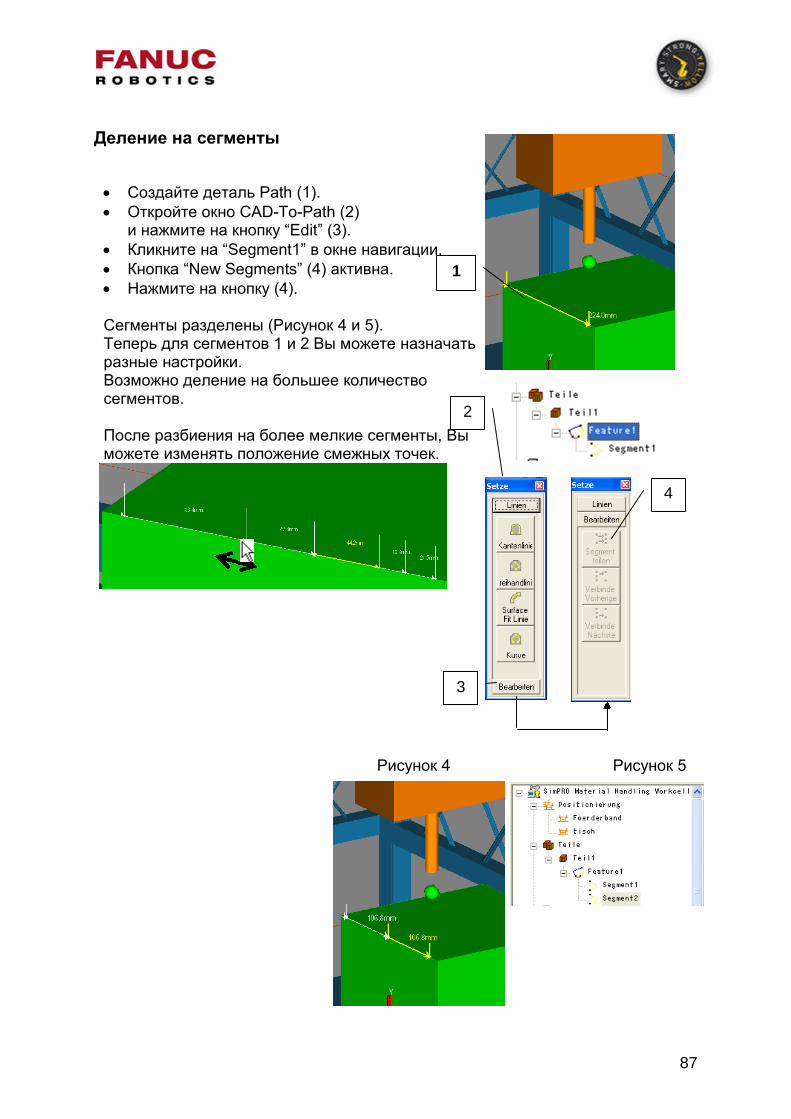
Деление на сегменты
Создайте деталь Path (1). Откройте окно CAD-To-Path (2)
и нажмите на кнопку “Edit” (3). Кликните на “Segment1” в окне навигации. Кнопка “New Segments” (4) активна. Нажмите на кнопку (4).
Сегменты разделены (Рисунок 4 и 5). Теперь для сегментов 1 и 2 Вы можете назначать разные настройки. Возможно деление на большее количество сегментов.
После разбиения на более мелкие сегменты, Вы можете изменять положение смежных точек.
Рисунок 4 Рисунок 5
1
2
3
4
88
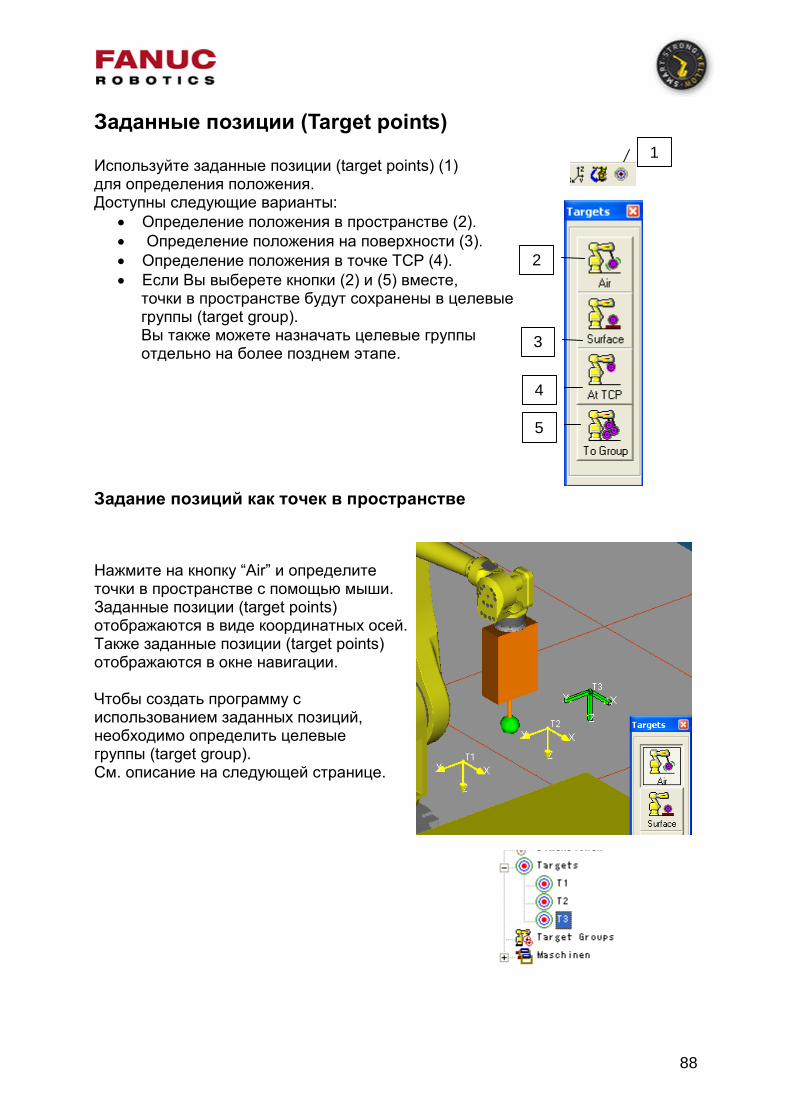
Заданные позиции (Target points)
Используйте заданные позиции (target points) (1) для определения положения. Доступны следующие варианты:
Определение положения в пространстве (2). Определение положения на поверхности (3). Определение положения в точке TCP (4). Если Вы выберете кнопки (2) и (5) вместе,
точки в пространстве будут сохранены в целевые группы (target group). Вы также можете назначать целевые группы отдельно на более позднем этапе.
Задание позиций как точек в пространстве
Нажмите на кнопку “Air” и определите точки в пространстве с помощью мыши. Заданные позиции (target points) отображаются в виде координатных осей. Также заданные позиции (target points) отображаются в окне навигации.
Чтобы создать программу с использованием заданных позиций, необходимо определить целевые группы (target group). См. описание на следующей странице.
1
5
2
3
4
89
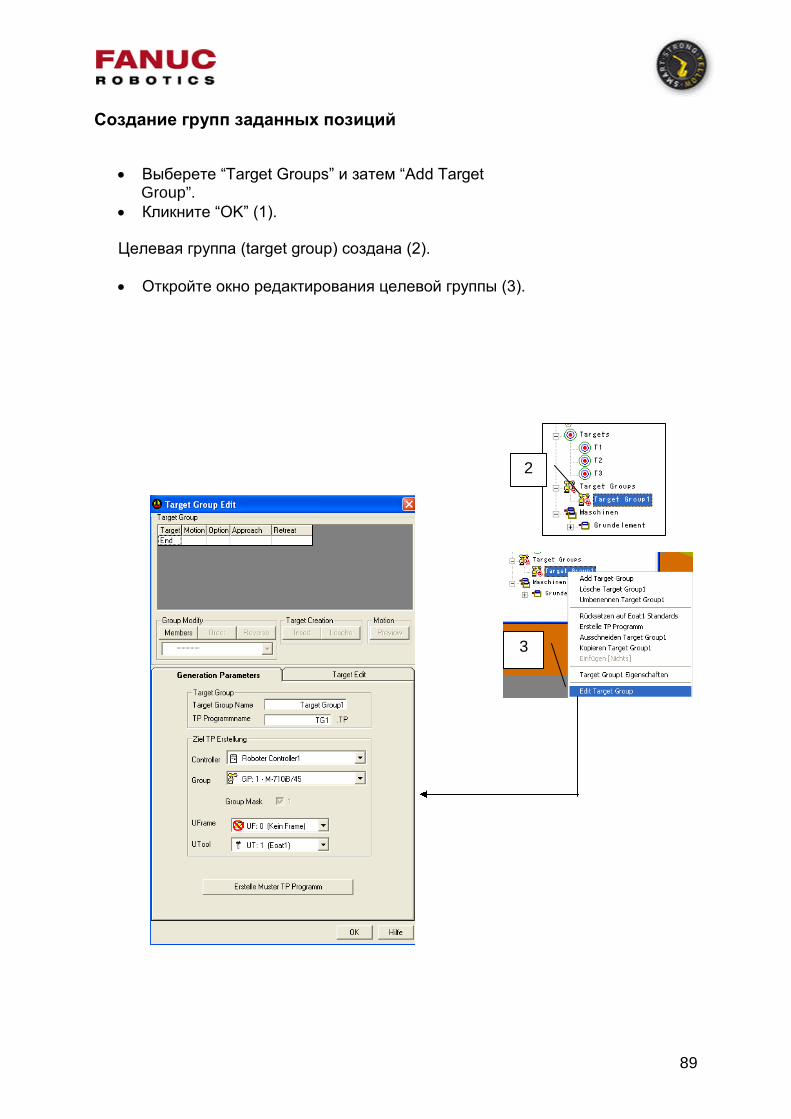
Создание групп заданных позиций
Выберете “Target Groups” и затем “Add Target Group”.
Кликните “OK” (1).
Целевая группа (target group) создана (2).
Откройте окно редактирования целевой группы (3).
2
3
90
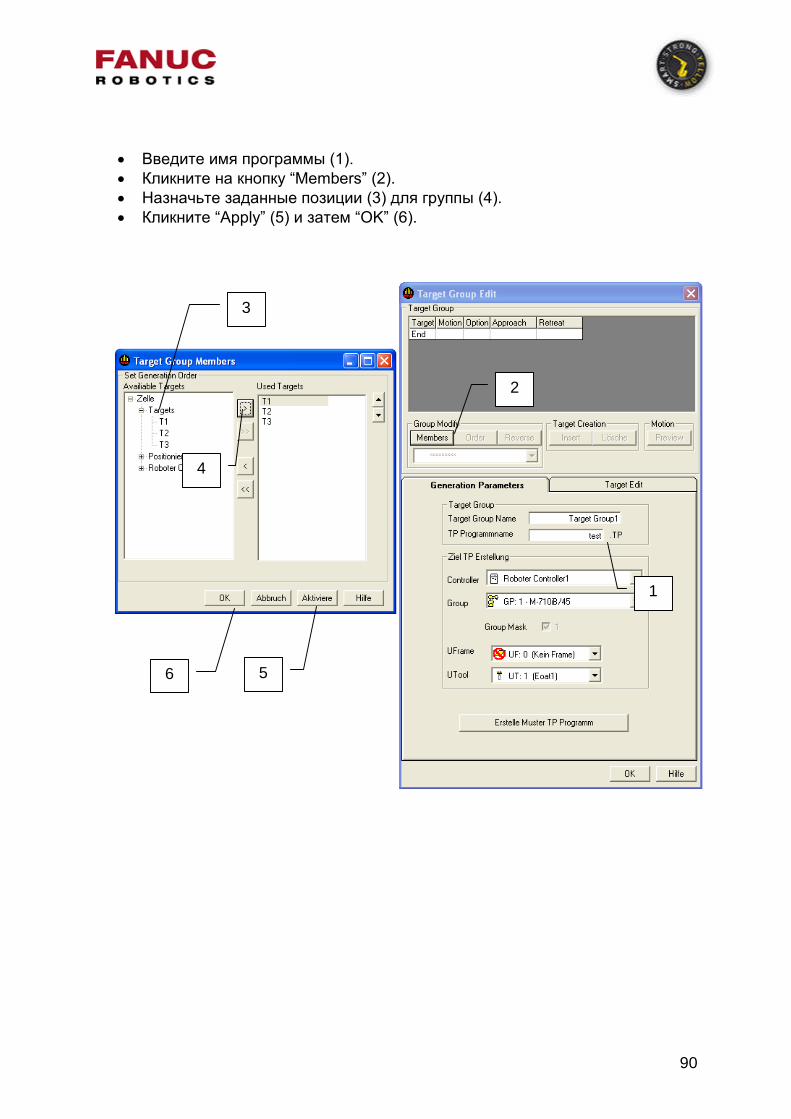
Введите имя программы (1). Кликните на кнопку “Members” (2). Назначьте заданные позиции (3) для группы (4). Кликните “Apply” (5) и затем “OK” (6).
1
2
3
4
56
91
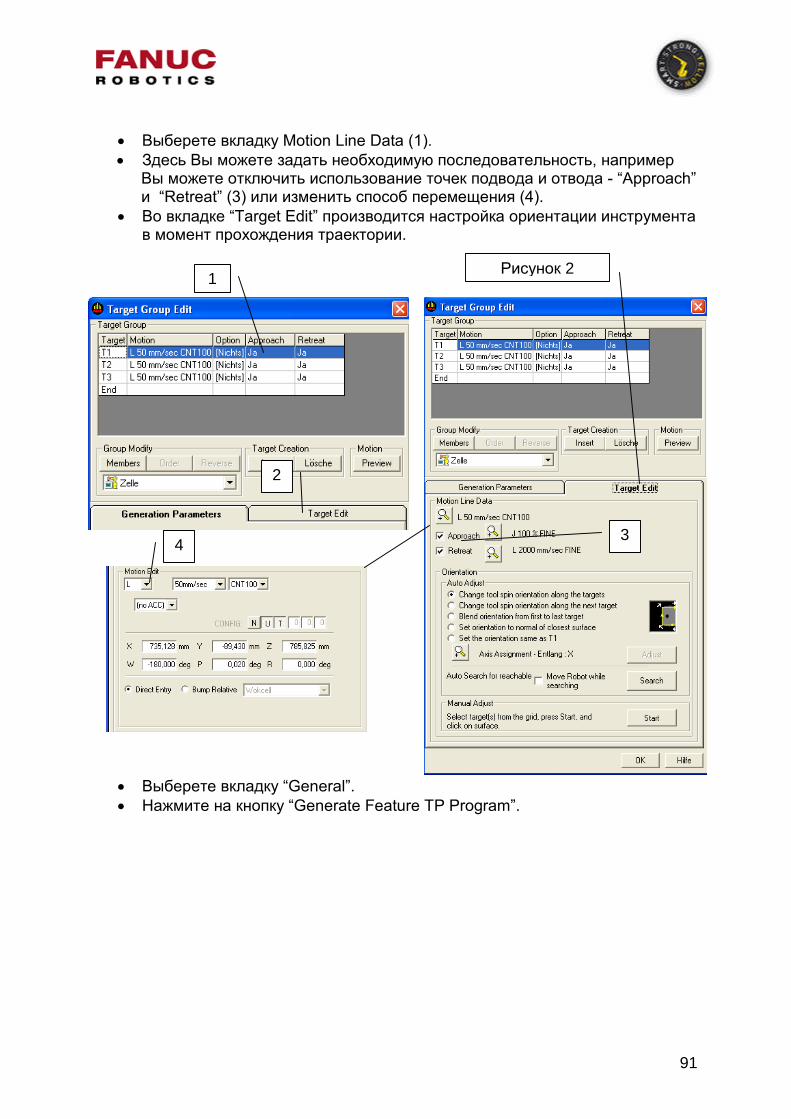
Выберете вкладку Motion Line Data (1). Здесь Вы можете задать необходимую последовательность, например
Вы можете отключить использование точек подвода и отвода - “Approach” и “Retreat” (3) или изменить способ перемещения (4).
Во вкладке “Target Edit” производится настройка ориентации инструмента в момент прохождения траектории.
Выберете вкладку “General”. Нажмите на кнопку “Generate Feature TP Program”.
1
2
34
Рисунок 2
92
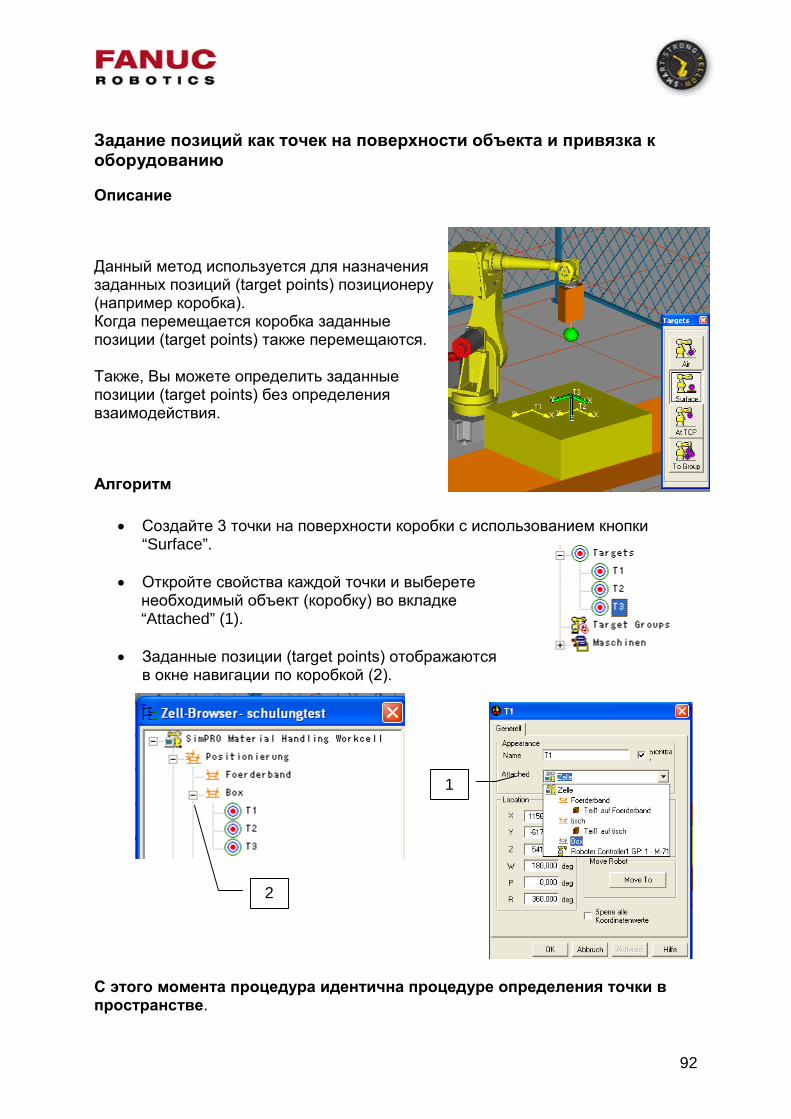
Задание позиций как точек на поверхности объекта и привязка к оборудованию
Описание
Данный метод используется для назначения заданных позиций (target points) позиционеру (например коробка). Когда перемещается коробка заданные позиции (target points) также перемещаются.
Также, Вы можете определить заданные позиции (target points) без определения взаимодействия.
Алгоритм
Создайте 3 точки на поверхности коробки с использованием кнопки “Surface”.
Откройте свойства каждой точки и выберете необходимый объект (коробку) во вкладке “Attached” (1).
Заданные позиции (target points) отображаются в окне навигации по коробкой (2).
С этого момента процедура идентична процедуре определения точки в пространстве.
2
1
93
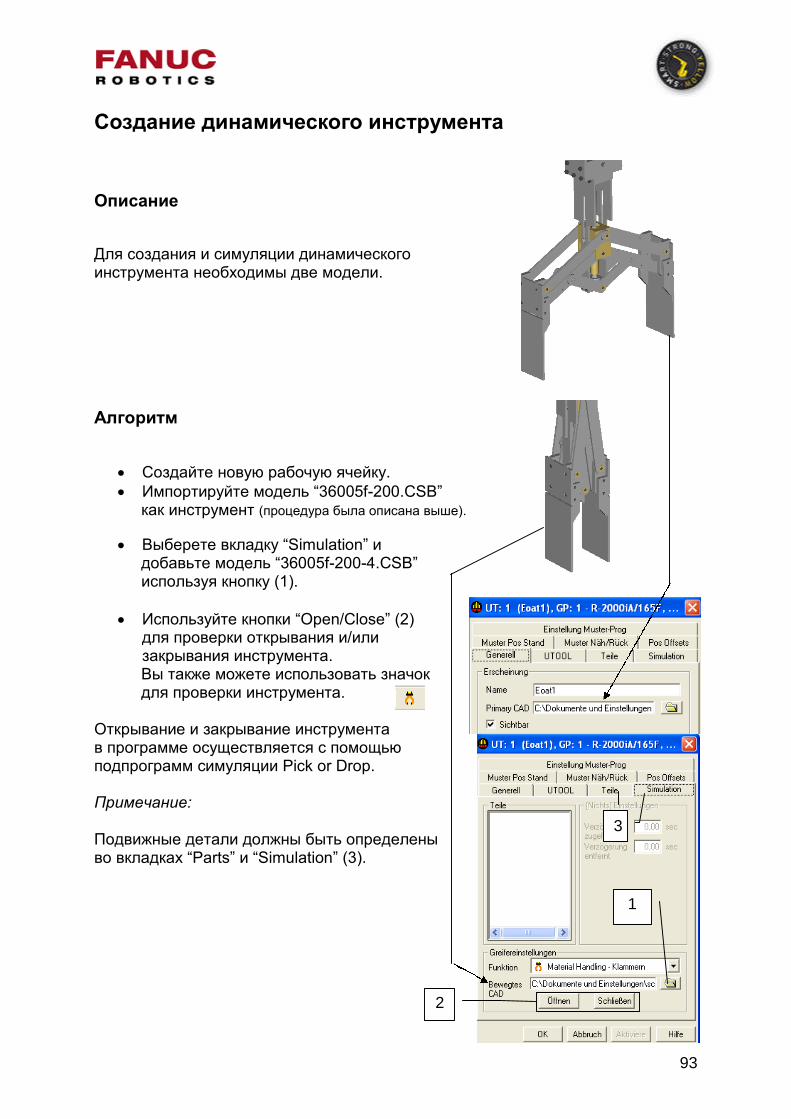
Создание динамического инструмента
Описание
Для создания и симуляции динамического инструмента необходимы две модели.
Алгоритм
Создайте новую рабочую ячейку. Импортируйте модель “36005f-200.CSB”
как инструмент (процедура была описана выше).
Выберете вкладку “Simulation” и добавьте модель “36005f-200-4.CSB” используя кнопку (1).
Используйте кнопки “Open/Close” (2) для проверки открывания и/или закрывания инструмента. Вы также можете использовать значок для проверки инструмента.
Открывание и закрывание инструмента в программе осуществляется с помощью подпрограмм симуляции Pick or Drop.
Примечание:
Подвижные детали должны быть определены во вкладках “Parts” и “Simulation” (3).
1
2
3





























