Embed Size (px)
Citation preview

RobotStudio (5.15)
Tomislav Pavlic, mag.ing.mech.
OSNOVE ROBOTIKE VTŠBJ
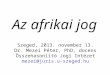
Stvaranje radne stanice sa upravljačkom jedinicom (New->Station with Robot Controller-> IRB140T 6kg
0.81m type C-> Create)
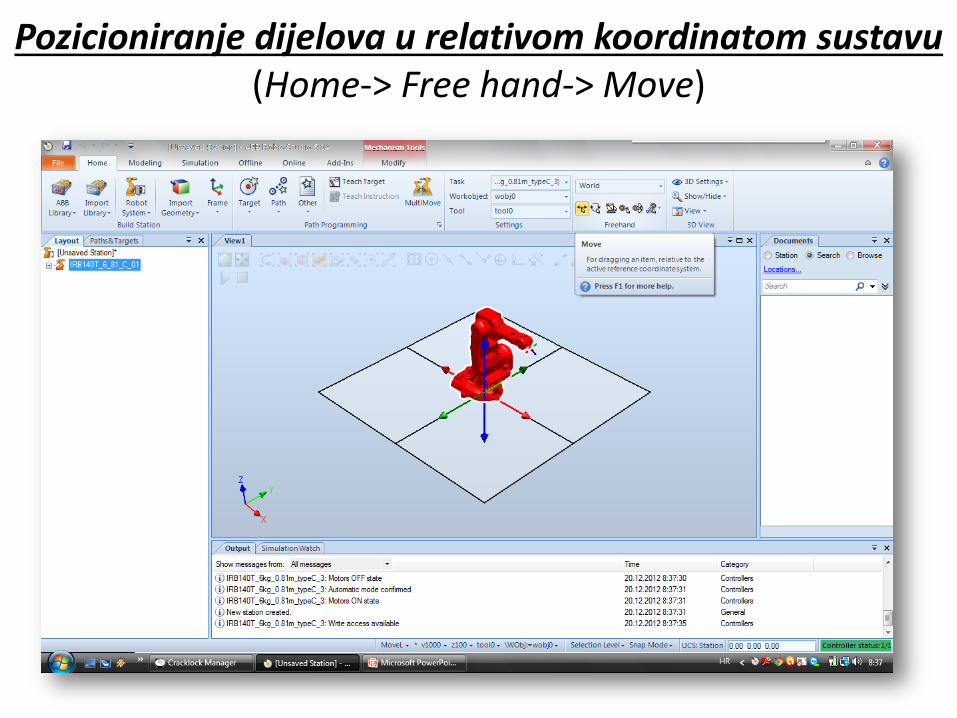
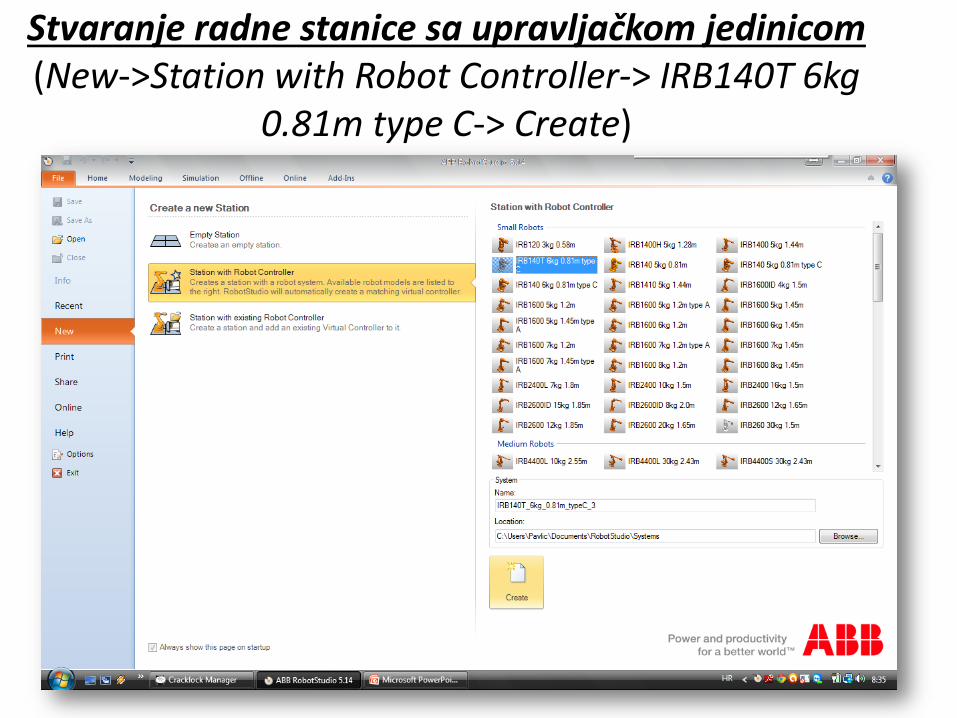
Pozicioniranje dijelova u relativom koordinatom sustavu (Home-> Free hand-> Move)
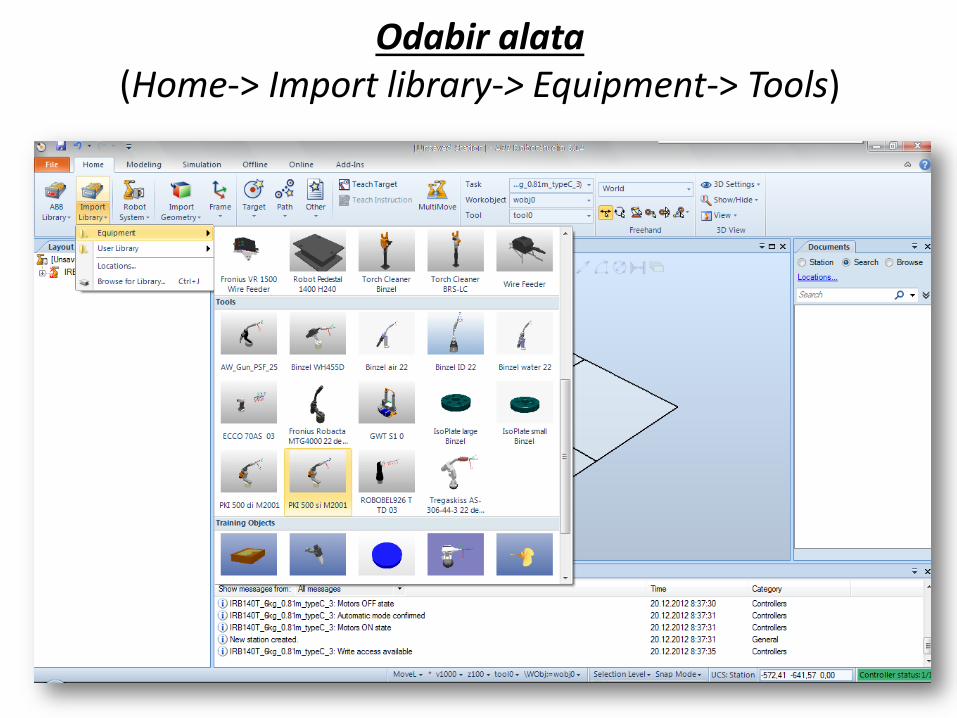
Odabir alata (Home-> Import library-> Equipment-> Tools)
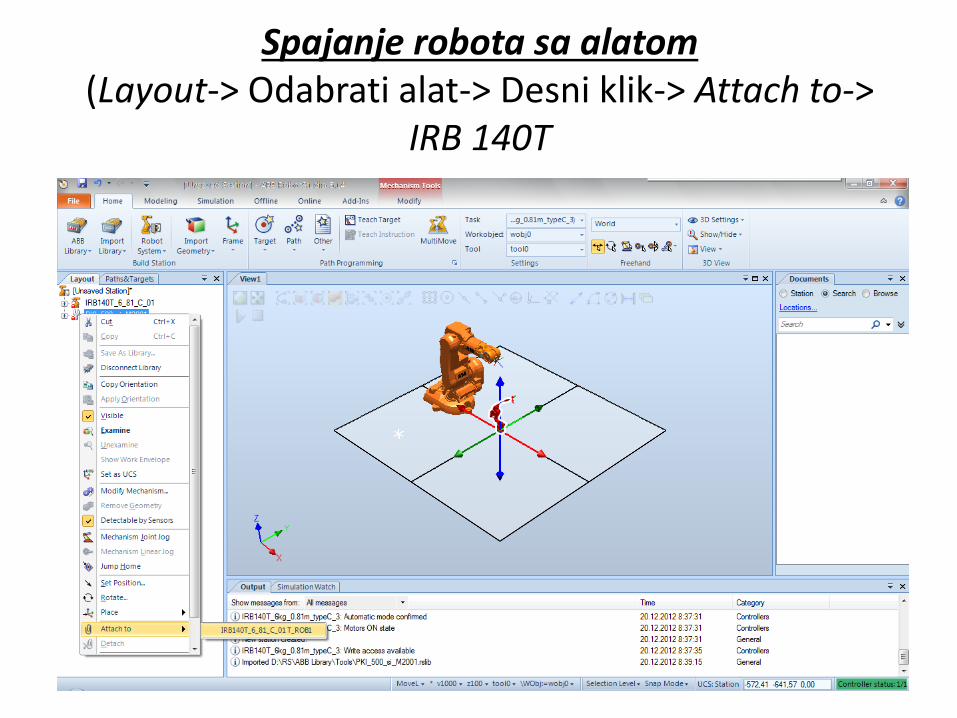
Spajanje robota sa alatom (Layout-> Odabrati alat-> Desni klik-> Attach to->
IRB 140T

Upravljanje zglobovima robota
• Jog Joint- za upravljanje pojedinim zglobom
• Jog Linear- za uprvljanje zglobom u koordinatnom sustavu
• Jog Reorient- za rotiranje zglobova
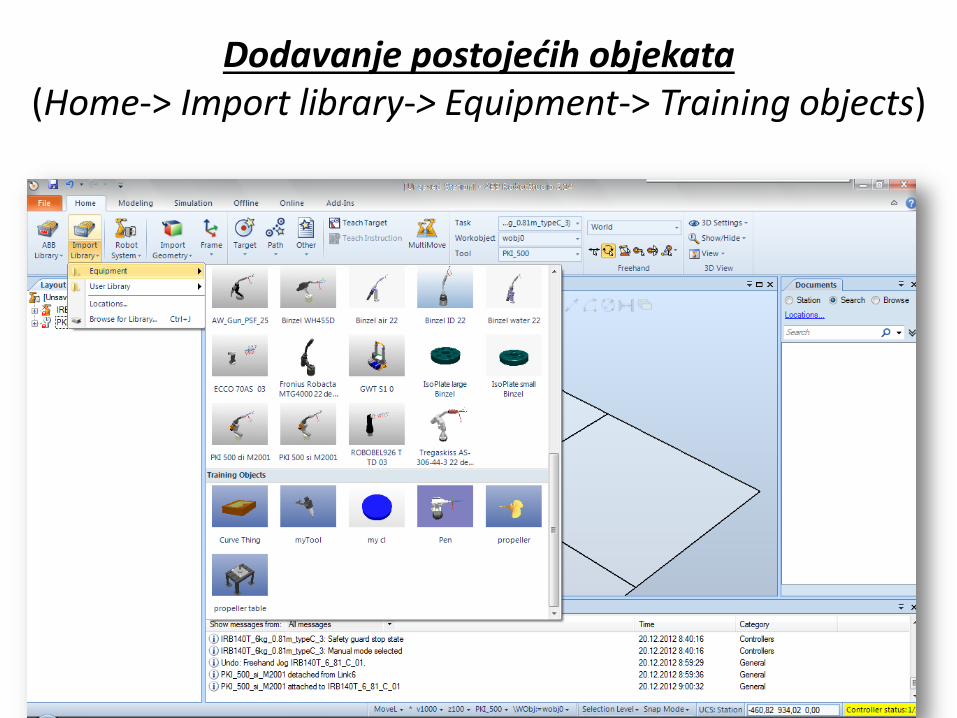
Dodavanje postojećih objekata (Home-> Import library-> Equipment-> Training objects)
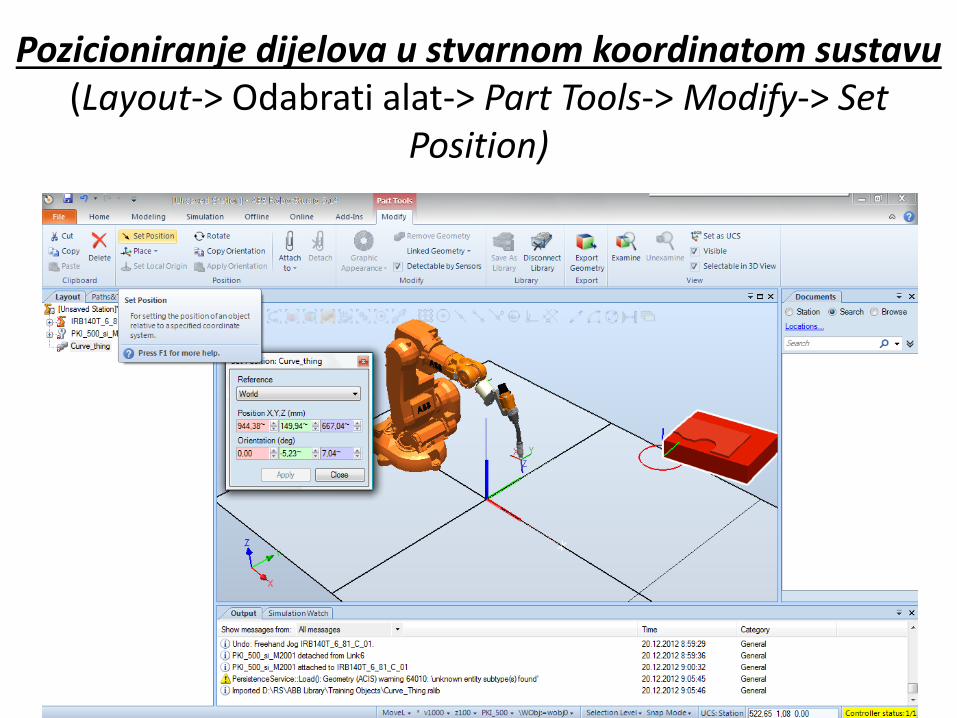
Pozicioniranje dijelova u stvarnom koordinatom sustavu (Layout-> Odabrati alat-> Part Tools-> Modify-> Set
Position)
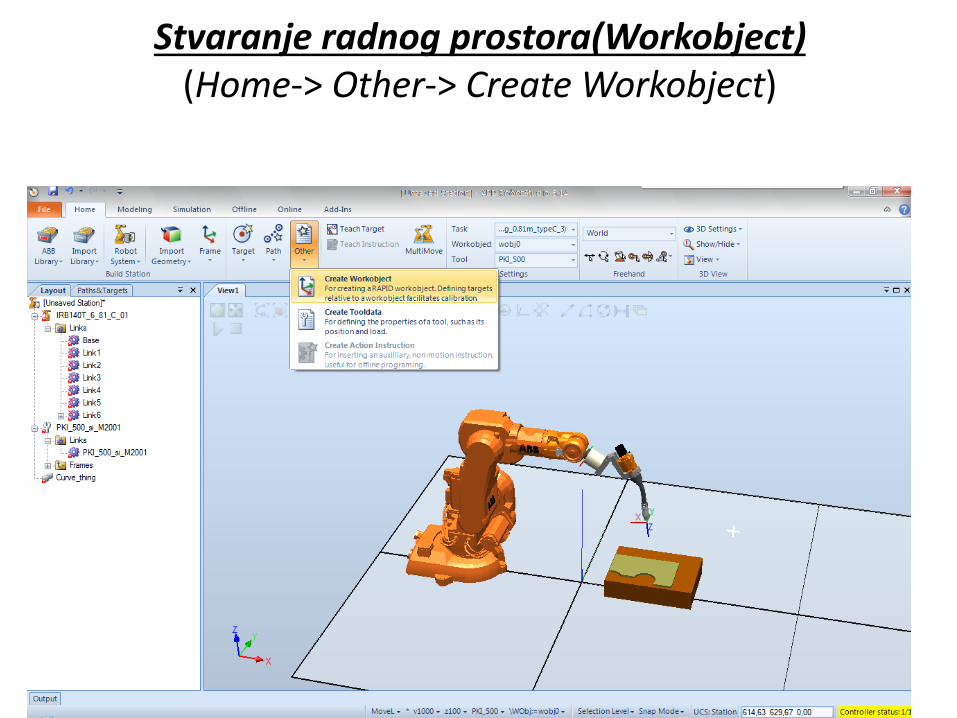
Stvaranje radnog prostora(Workobject) (Home-> Other-> Create Workobject)
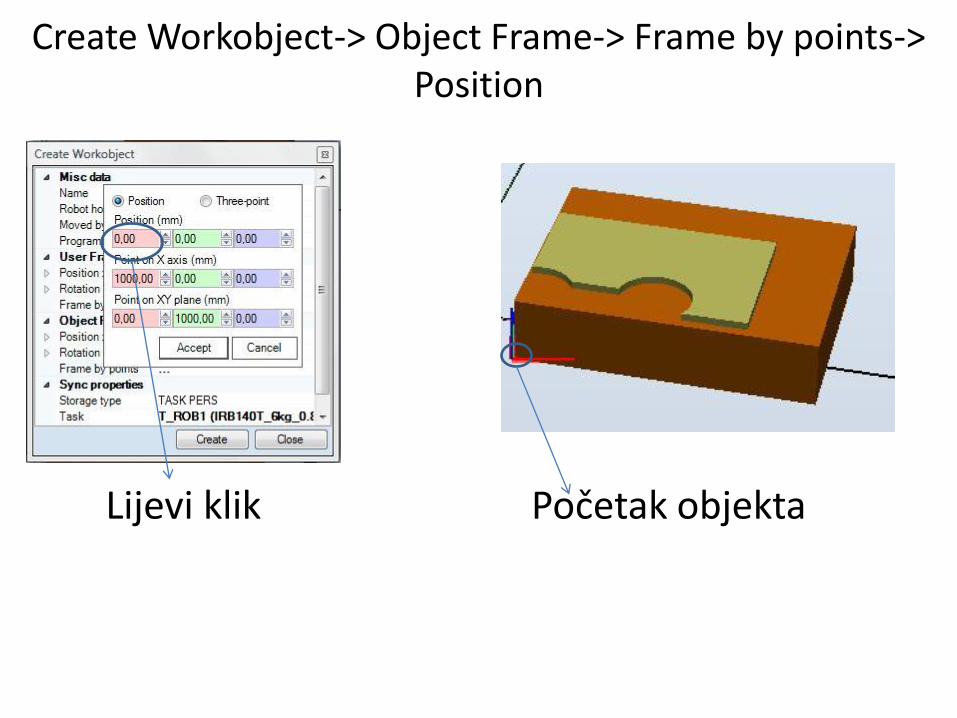
Create Workobject-> Object Frame-> Frame by points-> Position
Lijevi klik Početak objekta
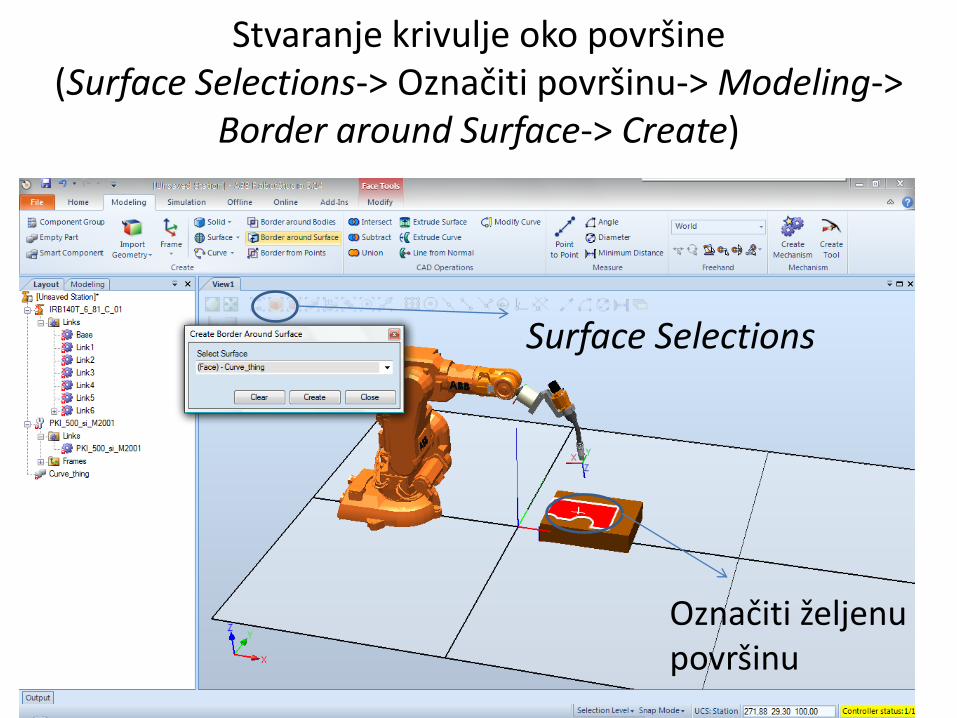
Stvaranje krivulje oko površine (Surface Selections-> Označiti površinu-> Modeling->
Border around Surface-> Create)
Surface Selections
Označiti željenu površinu
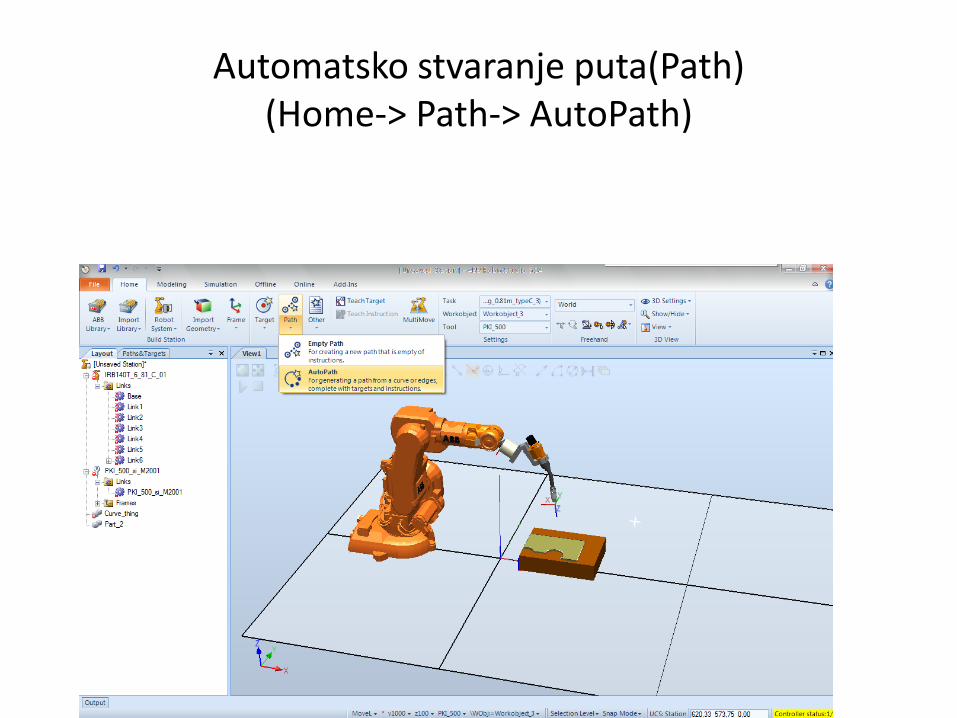
Automatsko stvaranje puta(Path) (Home-> Path-> AutoPath)
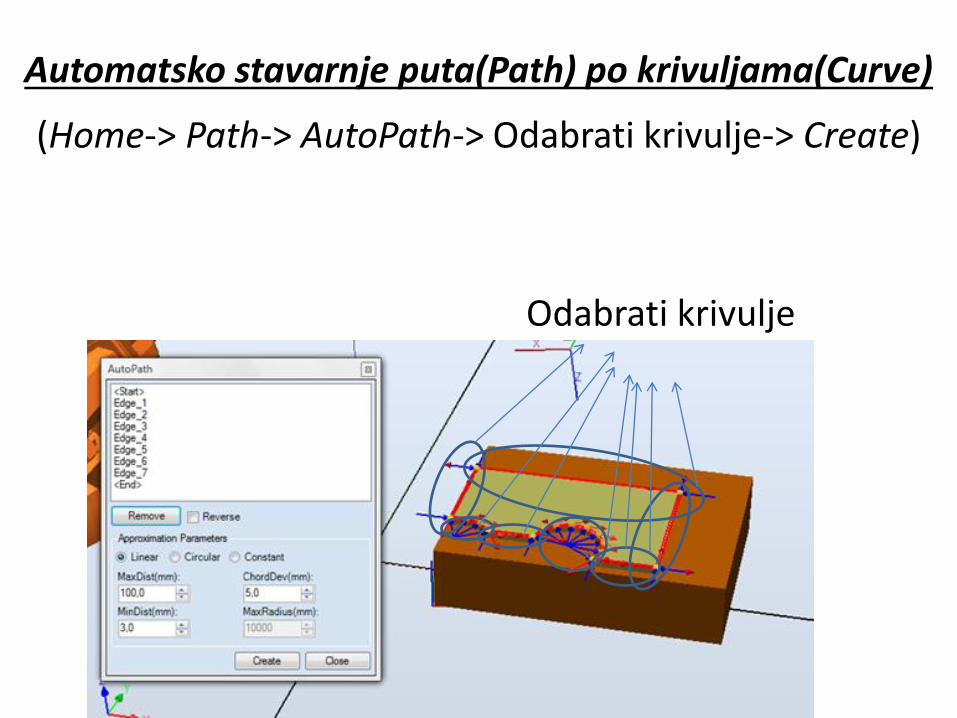
Automatsko stavarnje puta(Path) po krivuljama(Curve)
(Home-> Path-> AutoPath-> Odabrati krivulje-> Create)
Odabrati krivulje
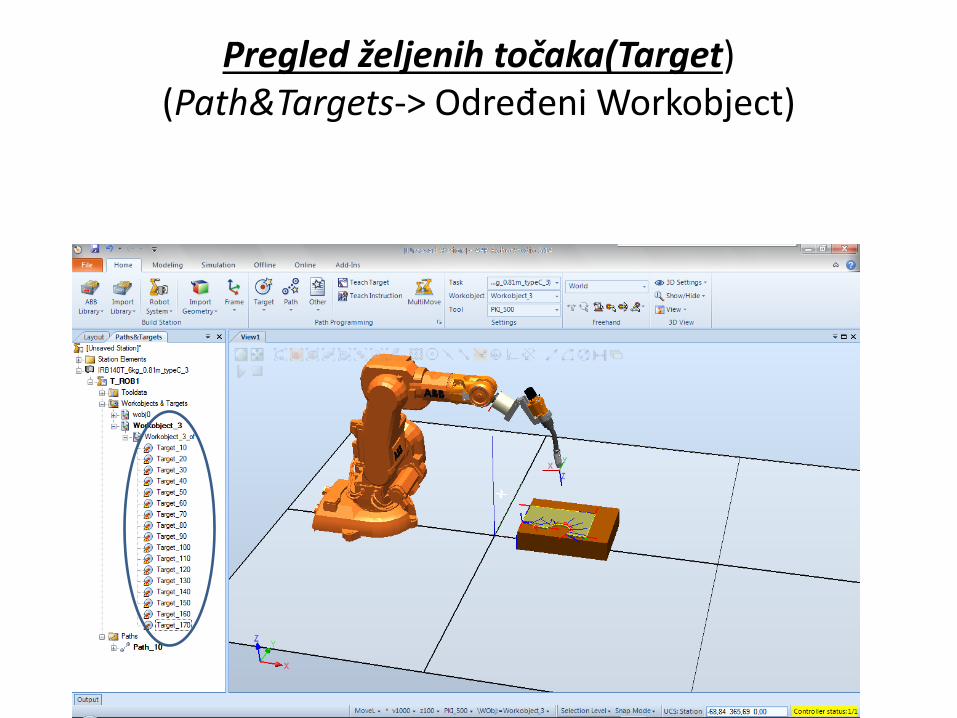
Pregled željenih točaka(Target) (Path&Targets-> Određeni Workobject)
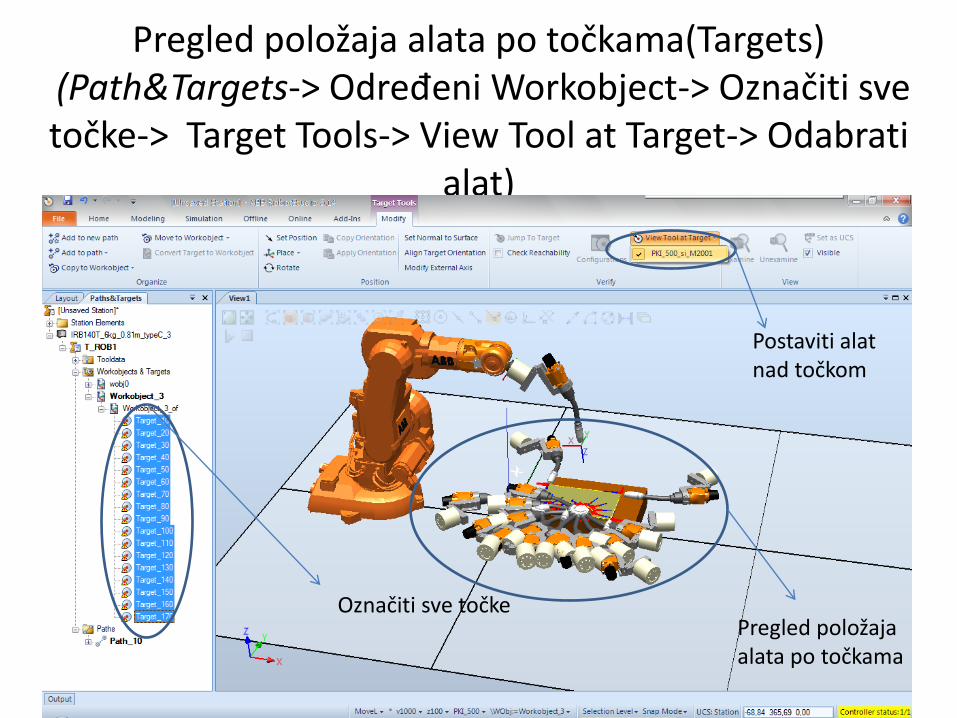
Pregled položaja alata po točkama(Targets) (Path&Targets-> Određeni Workobject-> Označiti sve točke-> Target Tools-> View Tool at Target-> Odabrati
alat)
Označiti sve točke
Postaviti alat nad točkom
Pregled položaja alata po točkama
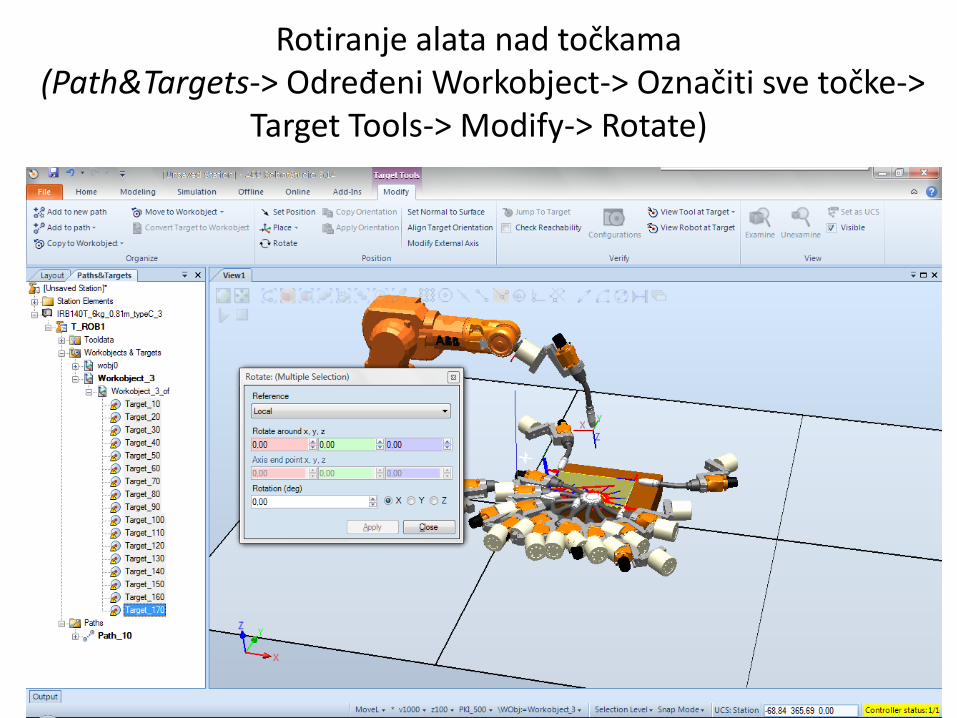
Rotiranje alata nad točkama
(Path&Targets-> Određeni Workobject-> Označiti sve točke-> Target Tools-> Modify-> Rotate)
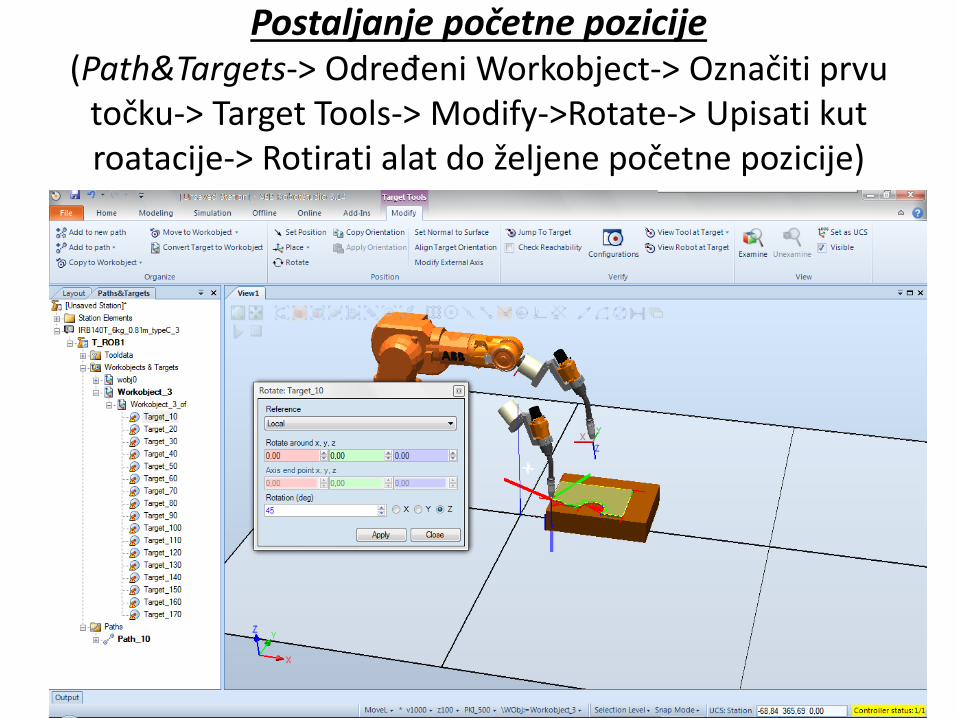
Postaljanje početne pozicije (Path&Targets-> Određeni Workobject-> Označiti prvu
točku-> Target Tools-> Modify->Rotate-> Upisati kut roatacije-> Rotirati alat do željene početne pozicije)
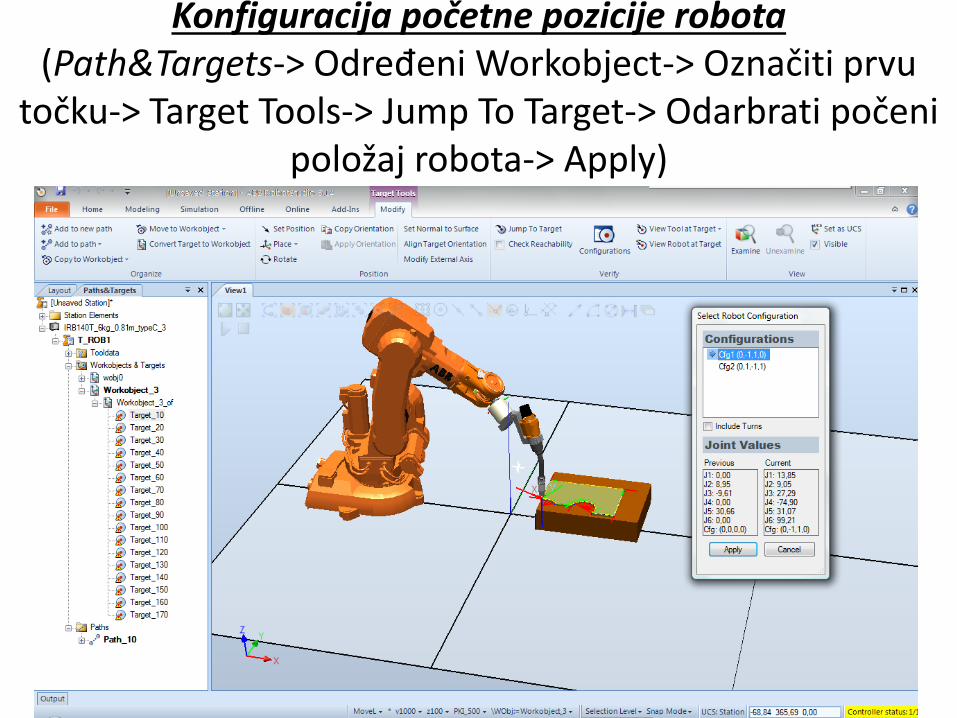
Konfiguracija početne pozicije robota (Path&Targets-> Određeni Workobject-> Označiti prvu
točku-> Target Tools-> Jump To Target-> Odarbrati počeni položaj robota-> Apply)





![A nemzetközi jog és a magyar jog viszonya - IJOTENA nemzetközi jog és a magyar jog kapcsolatának alkotmányos rendezése: történeti áttekintés [2] A nemzetközi jog és a](https://img.pdfslide.tips/doc/110x75/5e5f750bbd9b2420976e197b/a-nemzetkzi-jog-s-a-magyar-jog-viszonya-ijoten-a-nemzetkzi-jog-s-a-magyar.jpg)