Embed Size (px)
Citation preview

I
@I
4 Los sensores en el automóvil
4 Concepto, definición, emp eo en el
automóvil
5 Clasificación
7 Exigenciasprincipales,tendencias
11 Cuadro: Miniaturas
'12 Sensores de posición (recorrido/
posición angular)
12 Caracteristicas, magnitudes, principios
de medición
28 Potenciómetro de plato sonda
29 Sensorde mariposa
30 Sensores de anillos de cortocircuito
semidiferencial
31 Sensor de nivel del combustible
32 Sensores de pedal acelerador
34 Sensor de ángulo del volante de
dirección
36 Sensores de eje
37 Sensores ultrasónicos
38 Cuadro: Radar regulador de la distancia
entre vehiculos
40 Sensores de velocidad de rotación/
velocidad lineal
40 l\4agnitudes, principios de medición
52 Sensores de revoluciones inductivos
53 Sensores incrementales de ángulo de giro
54 Sensores de fase Hall
56 Sensores de velocidad de giro de las
ruedas
58 Sensores tacométricos de cajas de
cambios
59 Sensor de movimiento de aguja
60 Sensor inductivo (TZ-l)
6l Sensor Hall (TZ-H)
62 Sensores de convolución de diapasón
63 Sensores de convolución ("vasos")
64 Sensores de convolución micromecánicos
66 Sensores de aceleración y de vibraciones
66 Magnitudes, principios de medición
72 Sensores de aceleración de efecto Hall
73 Sensores de aceleración realizados por
micromecánica de volumen
74 Sensores de aceleración realizados
por micromecánica de superlicie
76 Sensores de aceleración piezoeléctricos
77 Sensores de picado piezoeléctricos
78 Sensores de presión
78 Magnitudes, principios de medición
81 Sensores de presión de capas gruesas
82 Sensores de presión micromecánicos
85 Sensores de alta presión
86 Sensores de fuerzalpar
B6 Magnitudes, principios de medición
94 Sensores OC
96 Medidores de caudal
96 Magnitudes, principios de medición
102 Sonda volumétrica de aire de presión
dinámica
104 Medidor de masa de aire por hilo caliente
105 Medidor de masa de aire por película
caliente HFM2
106 Medidor de masa de aire por película
caliente HFM5
108 Sensores de gas, sondas de concentración
108 Magnitudes, principios de medición
11 1 Sensores de calidad del aire
112 Sondas lambda de dos puntos
'I 16 Sonda lambda de banda ancha
118 Sensoresdetemperatura
118 Magnitudes, principios de medición
128 Sensores de temperatura
129 Cuadro: Micromecánica
130 Perspectivas
130 Tendencia del desanollo, ejemplos
134 Tratamiento de señales de los sensores
134 Preparación de señales
135 Ejemplos de aplicación
140 Procesamiento de datos en el automóvil
140 Exigencias, microordenador, unidad de
control
143 Sistema global
144 lndice de vocabulario
144 Vocabulario
148 Abreviaturas
¡

fl
i¡r * . ¡r:trril moderno, la electróni ca gana en importan cia día a dia.
-,,rs rslr$ ron los "órganos sensoriales" del vehículo con los que puede captar recorrido,
tDrnl:rrc- rrtaciones, velocidad, aceleración, vibraciones, presión, caudal, temperatura y otras
de influencia.
irre -¡-:.r sus señales han llegado a ser indispensables para las funciones de mando y regulación
or r:s ::¡rentes sistemas de gestión del motor, del tren de rodaje, de seguridad y de confort.
I :r¡¡*¿miento de datos permite finalmente evaluar con rapidez los parámetros mencionados
rc¿-:dolos para las funciones previstas en elvehículo.
ke --;derno erplica las magnitudes y principios de medición de los diversos grupos de sensores,
rcsc:;ndo además ejemplos de los sensores correspondientes.

L*s s*¡:s*$'*s sri i:i: : i: . .,
Los automóviles que corresponden al estadoactual de la técnica poseen un sinnúmero de
sensores. Como "órganos de percepción" de unvehículo, los sensores convierten magnitudesvariables de entrada en señales eléctricas que pre-cisan las unidades de control de los sistemas de
gestión del motor, de seguridad y de confort parala realización de funciones de mando y regula-ción.
Principios fu ndamentales
Concepto, definiciónEl concepto "sensor" es equivalente a ias nocionesde sonda y transmisor I
). Los sensores conviertenuna magnitud física o química @ (generalmente noeléctrica) en una magnitud eléctrica E, teniendo encuenta magnitudes perturbadoras Il. Esta conver-sión se efectúa a menudo a través de fases interme-dias no eléctricas. Las magnitudes eléctricas consi-deradas no son sólo la corriente y la tensión, sinotambién las amplitudes de corriente y tensión, lafrecuencia, el período, la fase o asimismo la dura-ción de impulso de una oscilación eléctrica, así
como los parámetros eléctricos "resistencia'] "capa-
cidad" e "inductancia" (figuras I y 2).
Un sensor se caracteriza por las ecuaciones
siguientes:
l. Señal de salida del sensor
E=f(@,Yt,Yz, ) (t)2. Magnitud a medirQ = g (E,Yt,Yz, ..) (2)
Si las funciones/o g son conocidas, representan
un "sensor tipo" con cuya aluda se puede calcuiarmatemáticamente y casi sin error, partiendo de laseñal de salida E y de las magnitudes perturbado-ras )j,la magnitud del objeto de medición (véase
"Sensores Inteligentes").
No existe ninguna definición clara que precisesi ios sensores pueden incluir ya una parte del tra-tamiento de señales o no. Se recomienda, sin em-bargo, no hacer una distinción, por ejemplo, entre
r) La desionacton 'transmisor" se deberia evjtar oficialmente. para
magn tudes de medicion especiales los sensores en parte también
reciben las denominac ones de "sonda" o "medrdor' (p. ej. sonda
lambda. medrdor de masa de a re).
"sensor elemental", "célula sensible" u otros térmi-nos similares, y la denominación "sensor inte-grado'1
Empleo en elautomóvilEn su calidad de elementos periféricos, los sensores
y actuadores constituyen los interfaces entre el ve-
hículo con sus complejas funciones de transmisión,frenado, tren de rodaje, carrocería, conducción ynavegación, y la unidad electrónica de controi - de
ordinario digital - como unidad de tratamiento.Un circuito de adaptación (véase "preparación de
las señales") se encarga en general de dar a las seña-
les de los sensores la forma normalizada necesaria
para la unidad de control (cadena de medición, sis-
tema de registro de valores medidos, figura 3).
Hay a disposición un gran número de circuitosde adaptación integrados, a la medida de sensores
especiales y ajustados a los vehículos respectivos.
Constituyen un complemento esencial y muy va-lioso de los sensores que se describen a continua-ción (por razones de espacio no expuestos aquí
con detalle). La aplicación de sensores no sería
posible sin el empleo de circuitos de adaptación.
En realidad,la calidad de medición de los sensores
sólo queda definida en unión con circuitos de
adaptación.
Función básica de un sensor
lVagnitud física/ Señal
química rl(no eléctrica)
de salidaeléctrica á
Magnitudes perturbadoras )i¡
(temperatura, f luctuación dela tensión de alimentación)
J-l

Imnl -e Jorie\1o del bucle de regulación global* o(ml;!l,: -.
::eden intervenir también en el pro-
;3u .i¿: ::-:::laciones de sensores de otras unida-
firl tr :i-j::ento iunidades de control), así
jlmr: - :"::-du,1or mismo a través de simples ele-
rngrn:: = :,¿¡do. Unos visualizadores informan
/ir. ::mJr-:-a: =obre el estado y curso del proceso
rflia* i :::¡a { da una idea de la multitud de sis-
EtriE {tÉ--ltrnicos va existentes en el automóvil y.fw{ r-lru] ¿umentará sin duda considerable-
]mgfii ::- =-:¿fUfO.
ftsfrcaciórt-,J* ic:i-:3: para automóviles pueden clasificarse
3:5 -::{Lrfias:
: -,-: . -- . .:-icaciónLe*::: ¿ ia tunción y aplicación los sensores se
i.Lff¡-rJ€ll efli
l :c-i::.5 luncionales, destinados principal-
=E::. ¿ tareas de mando y regulación,
r -i{-1a:ñ para fines de seguridad y asegura-
rj,r-::ttr protección antirrobo) y
ü::c c dad de sistemas del automóvil equipados con sensores.
Los sensores en el automóvil Pnnc,o os'--ca-e¡:aes
..1i.1,, Simbolo de sensor.
Los sensores en el automóvil.
l
l
i
éou:€)
Figura 3
1 Sensor de valores
medidos
2 Circuito de
adaptac ón
3 Excitador
4 Elementos act-aca':s
AK Actor
AZ lnd cac o"
SA lnterruo:c'
SE Senso. es
SG Unidad de::':':@ Magnrtud 's ca
f Magnrtud e,ectr ca
l1 Magnitudes
perturbadoras
-:"x$r."*-sLa@@ouf
"st-ñsdg
@)i

-
Figura 5
S Señal de sa ida
X i\,lagn tud de med cion
;1 cont nua inca
b cont nua no tnea
c discontinua de
escalones multiples
d discont ¡ua de dos
e scaio n es
Figura 6
a Señal de sa rda {
Frecuencia /
b Seña de sai da I
Drrac ón de
mpu so /,,
Los sensores en el automóv¡l princip os fundamenta es
. sensores paralavigilancia del vehículo(diagnosis de a bordo, magnitudes de consumoy desgaste) y paralainformación del conductory de los pasajeros.
Llirsc tle Lut'\ il ailt'ilClct'r\tiCil
Los sensores previstos para el mando, la regulacióny la vigilancia han de presentar curvas característi-cas distintas (figura 5):
Curyas características clntinuas linealesEsta clase de curvas se utiliza en particular paratareas de mando a lo largo de un gran campo demedición.
La facilidad de verificar y ajustar las curvas line-ales constituye además una ventaja notable.
Clases de curvas caracteristicas.
Formas de señales (ejemplos).
tU
zX
clt_rIJlJ'U
X
Curyas características continuas n0 lineales
Esta clase de curvas sirve a menudo para regularuna magnitud de medida dentro de un margenmuy estrecho (p. ej. regulación de gases de escapea 7 = l,regulación de Ia compresión de elementosde la suspensión). Las curvas grandemente nolineales de forma especial (p. ej.logarítmicas)también ofrecen ventajas cuando se requiere porejemplo la divergencia admisible relativa del valormedido en todo el campo de medición (sonda vo-lumétrica de aire).
Curvas características discontinuas de dos escalones
Esta clase de curvas (eventualmente con histéresis)sirve para vigilar valores límite para los que, alalcanzarse, es posible poner fácil remedio. Si elponer remedio es difícil, se puede dar un avisopreventivo, p. ej. mediante escalonamiento múltiple.
Cl.r'c tie l¡ rcrirll dc s.rlid,l
Los sensores se diferencian también por Ia clase desu señal de salida (figura 6):
Señql de salida analógica:
o corriente/tensión o amplitud correspondiente,¡ frecuencia/duración de período yo duración de impulso/factor de trabajo de los
impulsos.
Señal de salida discreta:
¡ de dos escalones (codificado binario),o de varios escalones desiguales (codificado
analógico) o¡ de varios escalones equidistantes (codificado
analógico o digital).
Se hace además una distinción entre si la señal está
continuamente a disposición a la salida del sensoro sólo en momentos discretos (de modo disconti-nuo). Si la señal, p. ej., es digital y es emitida demodo serial por bitios, es entonces forzosamentediscontinua.
@
u)i3,
T
Ule
--------> I


Los sensores en el automóvil Princioios fundamentales
Ten den cia del de s ar r oIIo :
La fabricación se efectúa en gran parte medianteprocesos automatizados sumamente rentables.
Resulta ejemplar ia realización de sensores de
semiconductores en "Batch Processing'1 que se
caÍacteriza por la producción simultánea de 100
a 1000 sensores sobre una rodaja de silicio.Tales instalaciones de fabricación sólo son renta-
bles, sin embargo, cuando se trata de grandes series,
que pueden sobrepasar en parte ya el consumo pro-pio de un solo proveedor y alcanzan muy a menudoun nivel de I a 10 millones de unidades por año. La
alta demanda de la industria automovilística ha des-
empeñado un papel hasta ahora inaudito, que marcarumbos incógnitos yestablece nuevas normas.
Duras condiciones cle fr.rncionantiento
Los sensores se hallan en puntos particularmenteexpuestos del vehículo. Están sometidos por consi-guiente a cargas extremas y han de resistir todaclase de esfuerzos:
o mecánicos (vibraciones, golpes),
o climáticos (temperatura, humedad),r químicos (p. ej. salpicaduras de agua, niebla sa-
lina, combustible, aceite motor, ácido de batería),o electromagnéticos (irradiaciones, impulsos pa-
rásitos procedentes de cables, sobretensiones,
inversión de polaridad).
Por razón de las ventajas resultantes, los sensores
se disponen con preferencia directamente en lospuntos de medición previstos (in situ). Esta ten-dencia ha originado una considerable agravaciónde las exigencias,
Ten den cia del de s ar r oIIo :
Para hacer frente a las cargas mencionadas hay quetomar medidas de protección que implican un altogrado de conocimientos en la "técnica de encapsu-
lado" (Packaging) de los sensores. Estas medidas
son, entre otras:
o la técnica de pasivación y conexión,¡ la técnica de estanqueización y unión,r Iacompatibilidadelectromagnética,
r un montaje que genere vibraciones reducidas,o los modos de test de duración útil y de simula-
ción,
o el empleo de materiales resistentes, así como unconocimiento muy preciso de los esfuerzos de-rilados del lugar de montaje respectivo. La cali-
dad de un sensor depende del dominio de las
medidas de protección adecuadas. Estas requie-ren a menudo unas inversiones muy superiores
a las que necesita el elemento de medición pro-piamente dicho.
Los sensores de fibras ópticas, en los que en funciónde la magnitud de medición se puede influir sobre
la luz guiada por ñbras ópticas (vidrio, plástico),
presentan una buena inmunidad contra perturba-
ciones electromagnéticas hasta el punto en que las
señales ópticas son convertidas de nuevo en seña-
les eléctricas. Su empleo en el futuro depende en
todo caso del correspondiente trabajo de desarro-
llo que se realice para la consecución de elementos
de medición y técnicas acompañantes económicos.
Compactibilidad
El número en constante aumento de sistemas elec-
trónicos en el automóvil y la forma cada vez más
compacta de los vehículos, junto con la conserva-
ción simultánea del alto grado de confort conse-
guido para los pasajeros en el habitáculo, obligan a
construir sensores extremamente compactos. La
creciente presión por ahorrar combustible exige
también una minimización sistemática del peso de
los vehículos.
lVlicrosistemas de componentes electrónicos.
La5oU
,-
Mícro-
mecánica:
- sensores

L\
--t -
l:3s
Crrll
.''--:e
_¡a-
É -;:
lltr-:-_,Lr J
't:t-¡ s.
i¡
o
a
o
1.,'..'. ::.;.,1e1 desarrollo:
-,, .:::.lrlogías de miniaturización de los compo--: .:: :..ctrónicos conocidas de la técnica de cir-
-... i .i; aplican en gran escala (figura 8):
'.--;-¡;trgias de circuitos estratificados e híbridos
::)-r:incias en función de la dilatación, de la
.:-:iratura y del campo magnético),
. : :. -,-rioqias de semiconductores (sensores Hall' :. :emperatura),
:-,::lrmecánica de superficie y de volumen
::rSr-rr€S de presión y de aceleración sobre la
:... de silicio, figura 9),
.: ;rrrlo gías de microsistemas ( combinación de
:, ! rr más microtecnologías, p.ej. de la micro-
.,.;trónica y de la micromecánica).
::=nudo, componentes que son mecánicamente
:- :rensables se utilizan a la vez para "encapsu-
:' -!rs sensores (inherentes). Esta tendencia deno-
: emento micromecánico de medición (estructura).
Grados de integración de los sensores
Senso(es)
Convencional
-:a-:-:¿ es
minada mecatrónicaaumenta sin cesar con el finde economizar costes y espacio, de manera que en
un próximo futuro reemplazarásin duda a casi to-
dos los otros sistemas hoy conocidos.
Alta precisión
Comparada con las exigencias impuestas a los sen-
sores de procesos industriales, la precisión reque-
rida de los sensores de automóviles es, salvo pocas
excepciones (p.ej. sondas volumétricas de aire),
más bien modesta. Las tolerancias admisibles son
en general >10/o del valor final del alcance de me-
dición, particularmente teniendo en cuenta las in-fluencias inevitables del envejecimiento. Estas tole-
rancias pueden observarse gracias a una técnica es-
merada para equilibrar las dispersiones unitarias,
así como para ajustar medidas que aseguran una
compensación eficaz de inducciones parásitas.
Unos sistemas cadavez más complejos y sofistica-
dos exigen sin embargo también en este campo
una mayor precisión, particularmente desde que se
pueden cumplir ya en gran medida las exigencias
antes mencionadas,
Tendenci a del de s ar r ollo :
Para garantizar la alta precisión, es suficiente de
momento (hasta cierta medida) disminuir las tole-
rancias de fabricación y refinar las técnicas de
equilibrado y compensación. Un adelanto esencial
lo aporta aquí la integración híbrida o monolítica
del sensor y de ia electrónica de tratamiento de se-
ñales en el punto mismo de medición, hasta llegar
Los sensores en el automóvil
Circuito de comunicación
:<-
Unidad de control
------l-=wDubF
l tr----,----;-----lrsE lsnl4Zl sol
I it'n"t¿gi'l I W I
f r-------->---f€jpocas---l
---------ller grado de integración !!fl SG Il+r -lf--l
t----------l-sq offil2osradodeintegración I sr lsnlA
:ffii .u Illr-l La
ooUlLÜ,
Figura 10
SE Sensor(es)
SA Preparación de la
señal (analógica)
A/D Convertidor
analógrco-dig tal
SG Unidad de control
(d gital)
MC M croordenador
T----------l segurcGffil
sersradodeinresraciónl sE lsnlA ''r'¡clffil *o
Ittt-l

Los sensores en el automóvil Principios fundamentales
a obtener circuitos digitales complejos tales comolos convertidores analógico-digitaies y los micro-ordenadores (figura l0).
Esos microsistemas llamados también,,sensoresinteligentes" utilizan hasta el máximo la precisiónintrínseca del sensor y ofrecen las siguientes posi-bilidades:
o alivio de la unidad de control,o interface uniforme, flexible y compatible con
bus,
o utilización de los sensores por varios sistemas,o aprovechamiento de efectos físicos de reducida
amplitud, así como de efectos de medición dealta frecuencia (amplificación y demodulaciónen el mismo lugar) y
o corrección de divergencias del sensor en elpunto de medición, así como equilibrado ycompensación comunes del sensor y de su elec-trónica, simplificadas y mejoradas por memori-zación de las informaciones correspondientesen una PROM.
Mediante la detección y digitalización simulráneasde las magnitudes perturbadoras, los "sensores in-teligentes" pueden calcular prácticamente sin errorla magnitud de medición buscada, utilizando eimodelo matemático mencionado en el capítulo"Concepto, definición" (con las ecuaciones 1 y 2).A tal efecto, los parámetros de modelado específi-cos de los ejemplares (magnitudes auxiliares refe-ridas a unidades ejemplares) son determinados enun proceso inicial que corresponde al antiguoequilibrado, y memorizados en una pROM inte-grada en el sensor (figura ll, módulo de corrección).
Módulo de conección de un sensor inteligente.
Señal de medición(no corregida) ,\a
Señal de lamagnitud deinfluencia
De este modo se pueden mejorar considerable-mente no sólo propiedades estáticas, sino tambiéndinámicas de los sensores (evaluación de la ecua-ción diferencial descriptiva del comportamientodinámico).
Las estructuras de sensores múltiples, que detec-tan estados complejos (diversificados) y eventual-mente reducen ya en el lugar el contenido de in-formaciones de éstos por medio de un gran nú-mero de sensores idénticos o de sensores de
diferentes tipos, exigen también la implantaciónde la electrónica en el punto de medición mismo.Entre ellos hay que contar ante todo los sensores de
imágenes,que en el futuro desempeñarán un granpapel para la detección de la situación en el inte-rior y en el exterior del vehículo.
Con un gran número de sensores de presióninte-grados y la formación de un valor medio no sólose puede aumentar la fiabilidad de la medición,sino también reducir Ia deriva (desviación) debidaal envejecimiento y en general imposible de regu-lar. Si las diversas células de medición son concebi-das para alcances de medición diferentes - siendoidéntica su capacidad de sobrecarga -, con un sen-
sor de tal clase se puede ampliar vastamente el al-cance de medición de alta precisión.
Señal de med¡ciónrea Corfecta
digital
l-ea
--_-___-_-->analógico
ca
U)tE
Parámekos modelo

)-e-
li.en
Ir--)
.üü-
- -ld-
L-
t-
):l
llL-].
..- J,t-: t{l
ran
:nte-
lir-r
1-
.üidat¡ I-
cebi-
rdoi€n-
I el-
@La micromecánica hace posible ejecutar funciones
de detención en un espacio mínimo. Las dimensio-
nes mecánicas típicas son del orden de algunos mi-
crómetros. Particularmente el silicio con sus propie-
dades especificas constiiuye el material adecuado
para la fabricación de las estructuras mecánicas muy
compactas, a menudo de filigrana. Su elasticidad,
asociada a sus propiedades eléctricas, es práctica-
mente ideal para la producción de sensores. Unos
procesos derivados de la tecnología de semicon-
ductores hacen posible integrar en un chip las fun-
ciones mecánicas y electrónicas de detección pro-
pias de los sensores.
Sensor de aceleración micromecánico.
Circuito
Hilos de unión Chip de sensor
Los senso¡es eF er aJ:or€J ','- a:-':-:
En 1994, un sensor de presión de admisión para la
detección de la carga del motor de un automóvil
constituyó el primer producto Bosch con célula de
medición micromecánica fabricado en serie. Otros
ejemplos de miniaturización más recientes son los
sensores micromecánicos de aceleración y de con-
volución iniegrados en sistemas para la protección
de los pasajeros y la regulación de la dinámica de
marcha. Las siguientes ilustraciones demuestran muy
claramenie las proporciones mínimas.
Estructura de peine comparada con el tamaño de uninsecto
La
ouf
@
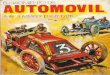
Sensores de convolución micromecánicos.
DRS-MM1 Regulación de la dinámica de marcha
Electrodos fijos
DRS-MM2 Detección de vuelco, navegación
100 um
Lado&D€0%#

Sensores de posrción (recorridolposición angular)
Sensores de posición (recorrido/posición angular) Caracteristicas/magnitudes de medición
Características
Los sensores de posición detectan recorridos y po-siciones angulares de los tipos más distintos y ocu-pan ciertamente el primer lugar entre los sensores
utilizados en los vehículos motorizados. En este
sector se persigue desde hace ya mucho tiempopasar al uso de sensores sin contqcto, que no están
sometidos a ningún desgaste y ofrecen por tantouna duración más larga y mayor fiabilidad. Confrecuencia, sin embargo, motivos económicos obli-gan a mantener el uso de sensores de cursor quecumplen aún bien su tarea en diferentes puntosdel automóvil.
Los sensores de posición son clasificados a
menudo entre los "senslres ex.tensiv0s",en los queel tamaño está fundamentalmente en correlacióncon la magnitud de medición. Con respecto a lossensores de propagación de ondas esta caracterís-tica ha de considerarse sin embargo con muchasrestricciones. Los principios de detección que mi-den sólo desplazamientos mínimos (algunos pm,p. ej. en el sentido de dilataciones), son asignadosen la presente clasificación a otros parámetros,
tales como p.ej.fierza,par y aceleración. La des-
cripción de los sensores de posición se limitaráprimero a los sensores que son apropiados paralamedición de recorridos y ángulos de mayordimensión (>1 mm y >1").
Tabla de magnitudes demedición
Existe en este campo un gran número de aplica-ciones en las que las posiciones constituyen las
verdaderas magnitudes de medición directas. Latabla 1 lo demuestra sinópticamente:
Reconidos y posiciones angulares como magnitudesde medición directas
Pos. de la mariposa g0o
de un motor de gasoilna
Pos. del acelerador/del pedal de freno 30"
Pos. de los asientos, faros y
espejos retrovisores
Recorido y pos. de la varilla de regul. 21 mm
de una bomba de inyec. diesel en línea
Pos. angular del mecanismo de control 60o
del caudal en una bomba rotativa deinyección diesel
Nivel de llenado en el dep. de combust. 20...50 cm
Canera del actuador del embrague 50 mm
Distancia vehículo-vehículo 150 m
o vehículo-obstáculo
Ángulo de la dirección (volante) 12.360'(t 2 vueltas)
Ángulo de inclinación 15o
Ángulo respecto al sentido de marcha 360'
El recorrido o la posición angular medidos repre-
sentan en otros casos otra magnitud de medición(tabla z):
Recorridos y posiciones angulares como magniludesde medición indirectas
Reconido de compres¡ón de los 25 cmelementos de suspensión (alcance delas luces, inclinación del vehículo)
Ángulo de torsión (par motor) 1 ...4'
Desplazam. de un plato sonda (caudal) 30...90o
Desplazamienlo de un sistema 0,5... 1 mm
masa-resorte (aceleración)
Los "sistemas de sensores incrementales", que se
utilizan sobre todo paralamedición de velocida-des de rotación, se designan con frecuencia comosensores de posición angular. Estos no son sensores
de ángulo en el sentido propio de Ia palabra,
puesto que parala medición de un ángulo de do-blez de las ruedas delanteras hay que contar en
función del signo adecuado, es decir, adicionar los
incrementos (valores en los que aumenta una
magnitud) mensurables con la aluda de esos sen-
sores, Tales sistemas de medición angular encuen-
tran una aplicación bastante limitada, pues las
indicaciones del contador pueden ser fácilmentefalsificadas de modo permanente por impulsosparásitos. EI empleo de marcas de referencia fijas,
detectables, no puede ayudar a resolver este pro-blema en toda su extensión. Además, esos sistemas

de medición angular pierden su posición absoluta
cuando se desconecta la tensión de funcionamiento.
La memorización no volátil del estado final no de-
para aquí remedio alguno, puesto que la mayoría de
las posiciones angulares puede sufrir variaciones
mecánicas también en estado desactivado.
Principios de medición
Sensores de potenciómetro
Elpotenciómetro de cursor (figura 1) utiliza para
trnes de medición la equivalencia existente entre la
longitud de una resistencia alámbrica o de capa
"Cermet" o "plástico conductor") y su valor
óhmico. Actualmente es el sensor de recorrido/posi-
ción angular más económico. Para evitar sobrecar-
gas, generalmente está aplicada la tensión a Ia pista
de medición a través de pequeñas resistencias en
serie Ry (también para elcalibrado del punto cero y
el ajuste de Ia elevación). La forma dada aI contorno
de la pista de medición (también por pequeñas sec-
ciones) influye en elrrazado de la curva caracterís-
tica. La conexión del cursor se efectúa generalmente
a través de una segunda pista de contacto de igual
superficie, que tiene debajo una capa de material
conductor de bajo ohmiaje.
Un bajo amperaje de la corriente de salida
1A < I mA) y un encapsulado a prueba de polvo
contribuyen a reducir el desgaste y el falseamiento
de los valores medidos. Un par de fricción óptimo
ibrmado por el cursor y la pista de contacto consti-
tuye lurnbtén una condición previa para un desgaste
reducido; el cursor puede tener entonces la forma de
una "cuchara" o de un "rascador" y disponer de una
sola o de varias ramas, teniendo incluso la forma de
una "escoba'l
Toda una serie de ventajas evidentes se halla frente
a un número considerable de graves desventajas:
\éntajas de los sensores de potenciórretlo
¡ Estructura sencilla, fácil de comprender,
o efecto de medición muy grande (carrera de
medición = tensión de alimentación),
o no se requiere electrónica,
r buena resistencia a tensiones parásitas,
r amplia gama de temperatura (<250"C),
o alta precisión (mejor del I % del valor final del
alcance de medición),
Sensores de oos c c.
amplio campo de medición (cubre casi 360o),
ejecución de redundancia sin problemas,
facilidad de calibrado (por láser, etc.),
curva característica flexible (pista de ancho
variable),
montaje flexible (sobre superficie plana o
curvada),
numerosos fabricantes,
examen rápido de las muestras.
Desr,entajas de los sensores de potenciómetro
o Desgaste mecánico, abrasión,
o errores de medición a causa de restos de abrasión,
o problemas en caso de empleo dentro de unlíquido,
o variación de la resistencia de contacto entre
cursor y pista de medición,
r levantamiento del cursor en caso de fuertes acele-
raciones y/o vibraciones,
. ensayos complicados y costosos,
o miniaturización limitada,
o producción de ruido.
Ejemplos de sensores de potenciómetro
o Potenciómetro de plato sonda
(KE- y L-Jetronic),
sensor de ángulo de mariposa
(M-Motronic),
sensor de pedal acelerador, módulo de pedal
acelerador,
sensor de nivel de combustible.
Potenciómetro de cursor
a
o
o
a
a
o
a
:--i-lltl
:: --:eS
:-
:-
._ -L'\
:(---
-i
,i
::1aS
u:€
Figura 1
'l Cursor
2 Pista de res stencia
3 Pista de contacto
/a Corriente del cursor
lro Tensión de
alimentación
t,'n Tensión de medicrón
/l Resrstencia
r¡,""* Ángulo de rotación
máxlmo
17 Ángulo de medición

Sensores de posición principios de med c or
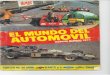
Principio del sensor HF de corrientes de Foucault
Sensores inductivosDe todos los principios de medición de posiciónsin contacto, los sensores de circuito magnéticoson particularmente insensibles a las perturbacio_nes y muy robustos. Eso rige sobre todo para losprincipios basados en la corriente alterná, o sea,sistemas inductivos de circuito magnético. Las dis_posiciones de bobinas necesarias para esos senso_res requieren sin embargo mucho más espacio encomparación con los sensores micromecánicos, nofacilitando p.ej.la realización de un montaje re_dundante (medición paralela). Además, la cone_xión que requieren las bobinas constituye un fac_tor poco favorable respecto a los costes y a la fiabi_lidad. Entre el gran número de principios de estetipo conocidos, dos sistemas muy parecidos en sumodo de funcionar han encontrado aplicación enel automóvil:
Sensores clc' corrientes cle FoucaultClando una placa (p. ej. de aluminio o de cobre)plana o curvada eléctricamente conductiva seacerca a una bobina (generalmente sin núcleo)recorrida por una corriente alterna de altafrecuencia, la resistencia efectiva y la inductanciade esta bobina sufren una variación. Las corrientesde Foucault que se forman en la placa amortigua_dora (spoiler) por el aumento del acoplamieniomagnético son la causa de este efecto. La posiciónde esta placa amortiguadora representa elrecorrido de medición s (figura 2).
Si bien el principio funciona ya bien en la gama dekHz, se recomienda adoptar una frecuencia de uti-lización superior, del orden de MHz, para la detec_ción fiable de movimientos rápidos (y parareducirel consumo de corriente), Eso exige en general unacoordinación directa de la electrónica con el sen_sor, Para convertir el efecto de medición en un ten_sión eléctrica de salida se puede utilizar tanto elefecto de amortiguación (resistencia efectiva)como el efecto de desplazamiento del campo mag-nético (inductancia). En el primer caso es apro-piado p. ej. un oscilador de amplitud variable; enel segundo caso, un oscilador de frecuencia varia-ble o un divisor de tensión inductivo de alimenta_ción constante (disposición diferencial).
El principio de corrientes de Foucault es adap-table en formas muy variadas a la tarea de medi-ción. Es muy a propósito para detectar tanto gran_des recorridos y ángulos como también p.qu.nu,magnitudes, presentando generalmente sólo unreducido cambio de temperatura.
Sensores cle anillo cle cortocircnitcrAl contrario del sensor de corrientes de Foucault,la bobina de un sensor de anillo de cortocircuitoposee siempre un núcleo de material magnéticodulce, generalmente chapeado, en forma de U o deE derecha o curvada (figura 3). Laplaca(spoiler)móvil está conformada aquí como "anillo de cor-tocircuito" de material perfectamente conductor,tal como cobre o aluminio, que puede desplazarsesobre uno o sobre todos los brazos del núileo. portener un núcleo ferromagnético, estos sensores
Sensor de anillo de cortocircuíto.
Figura 2
I Placa amortrguadora
2 Corr entes de
Foucault
3 Boblna sin núcleo
4 Oscriador de
ampliiud variable
5 Demodulador
.r Recorido de
medicion
.1/\I Tens ón del oscilador
[ ¡r i r Tensión de salida
Figura 3
1 Ani lo de
cortocircuito
2 Núcieo de mater al
magnetico dulce
3 Bobina
1 Coriente
lv¡ Corlente de
Foucault
Lt¡t lnductanciay
rl' ', flulo magnético
para el recorrido
de medición .i
oU:¡,1::
ouf
ail)

poseen una inductancia muy superior a la de los
sensores de corriente de Foucault. Pueden funcio-
nar por tanto igualmente bien a bajas frecuencias y
no requieren imprescindiblemente que se incor-
pore la electrónica de tratamiento de señales en el
sensor mismo.
El campo alterno generado por la corriente de la
bobina 1 en el interior y alrededor del núcleo fe-
rromagnético no puede atravesar el anillo de cor-
tocircuito, puesto que por las corrientes de
Foucault es prácticamente reducido a cero. Estas
corrientes de Foucault limitan, pues, la propaga-
ción del flujo magnético alespacio comprendido
entre la bobina y el anillo de cortocircuito. La po-
sición del anillo influye así sobre la inductancia de
modo casi lineal en un amplio campo. Casi toda la
longitud de construcción dei sensor se puede
aprovechar para la medición.
La masa móvil del anillo de cortocircuito es
muy reducida. Un contorneado (conformación)
del espacio entre los brazos influye en la forma de
la curva característica: una reducción de la distan-
cia entre los brazos hacia el final del campo de me-
dición mejora aún más la buena linealidad ya exis-
tente. El funcionamiento se efectúa generalmente
en el margen de 5...50 kHz, según el material y la
forma. El sensor es utilizable igualmente en condi-
ciones de servicio muy duras, p. ej. en bombas de
inyección diesel,
También este principio de medición es adaptable
de modo muy flexible a la respectiva tarea y es co-
nocido por sus muy distintas formas de ejecución
y aplicación (figuras 4 y 5).
Sensores de reconido de anillo de cortocircuilo,
Sensores ce 33s c:'
El "sensor semidiferencial'l que dispone de un
anillo de cortocircuito de medición (móvil) yde un anillo de cortocircuito de referencia (fijo),ofrece una precisión muy grande; el circuito de
evaluación está constituido por un
o divisor de tensión inductivo (evaluación de las
inductancias Lyl L2 o lLt - LtU [L, + Lr])o por un
¡ circuito resonante que utiliza el sensor comoelemento determinante de frecuencia, para la
generación de una señal de frecuencia analógica(extremamente insensible a las perturbaciones,
fácil de digitalizar).
Sensores angulares de anillo de cortocircuito
15
¡ gama de
::¿ de uti-
" la detec-
i:: reducir
.:eral una
:. el sen-
:t un ten-
:.ftO el
::i'a I
:fo mag-
:! .1PrO-
-:¡le; en
--:¡ r'aria-
-:nlenta-
: -s adap-
:- medi-
::IO gran-
:;queñas:.-.lo un
: -''¡cault,:.:::cuito:.:etico::eUode
,:oiler).- le cor-
:-.J.uctor,
..:lazarse:-;.eo. Por
:l:rlIeS
oú3rit!)
b,3(g
og:{ii)
Figura 4
a Sensor de ani io de
cortoc rcuito
b Sensor de disco de
cortocircuito
1 Anlllo de cortoc rcuito
2 D sco de cortoc rcu to
1-l¡r) lnductancia
,7 Ángu o de medición
Figura 5
a Sensor sencillo
b Sensor sem -
diferencia
c Sensor integramenie
diferencial de ani 1o
de cortocircu to
1 Anillo de cortoc rcuito
2 Núcleo
3 S stema de medicrón
4 Srstema de referencia
(equilibrado)
/- lnductancia

Figura 7
1 Bobina de varlas
cámaras
2 Núc eo de ferita
3 Recubr m ento de
p ásiico con coiisa
4 Eje de rotac on con
esp ga de guia 5
1.r rt lnductanc a para e
recorido de medrc ón .r
9 Ánou o de med ción
Figura 6
1 Ani lo de cortocircuito
de referencia (f jo)
2 Bob na de referenc a
3 An llo de cortocircu to
de medición (móvil)
4 Flulo de acoplamiento
5 Bobina de medrc ón
6 Un dad de contro
.i Recorrido de la varila
de regulación
SA Tratam ento de señales
A/D Convertidor analógico-
dig ta
Sensores de posición Principios de nedicro-
El efecto de medición de los sensores de anillo de
cortocircuito es relativamente elevado; su valortípico es: L^6,lLn ¡, = 4. El comportamiento elec-
tromagnético de un sensor de anillo de cortocir-cuito se puede calcular de modo tridimensional yy realista con ayuda de diferentes programas de
simulación comerciales (figura 6).
Ejemplos de sensores de anillo de cortocircuito
o Sensores del recorrido de regulación para
bombas de inyección en línea (sensor de
carga adosado, sensor EDC),
o sensor de ángulo para bombas rotativa de
inyección,
Sensores de bobina cle núrcleo buzo
El principio de este tipo de sensor (figura 7) se
basa en la variación de la inductancia de una bo-bina con ayuda de un núcleo móvil. Este núcleopuede estar formado por un hierro macizo (alam-
bre), una chapa de hierro arrollada o material de
ferrita, y requiere una guía precisa (de fricción).Mediante circuitos especiales de tratamiento de la
señal se puede reducir la no-linealidad natural de
este tipo de sensor. La longitud de construcciónsobrepasa a menudo considerablemente el reco-
rrido de medición.
Desarrollo calculado de las líneas de campo en un sensor dereconido semidiferencial de anillo de cortocircuito para bom-bas de inyección diesel en línea de regulación eleclrónica.
Sensor de bobina de núcleo buzo.
L(s)
Un arroilamiento escalonado en cámaras desigua-
les permite evitar estas desventajas.
El montaje de una segunda bobina de núcleo
buzo (móvil) facilita ampliar el principio de medi-
ción, formando un "sensor de inductancia diferen-
cial" que (conectado como divisor de tensión al-
terna) presenta una mejor linealidad y estabilidad
del punto cero. Si las dos bobinas, que actúan en
sentido inverso, no son alimentadas directamente,
sino por una bobina primaria simétrica acoplada
magnéticamente (principio del transformador di-ferencial), se puede evitar entonces la influencia
negativa de las resistencias de cobre de las bobinas.
Este principio de medición es poco apropiado para
la medición de posiciones angulares, puesto que
para ello hay que convertir primero mecánica-
mente el ángulo de rotación en un recorrido. Esta
conversión implica otros errores.
Ejemplos de sensores de bobina de núcleo buzo
. Sensor de pedal acelerador (vehículos eléctricos)
o Electroválvulas proporcionales de posiciona-
miento
Sensores magnetostáticosLos sensores magnetostáticos sirven para medirun campo magnético de corriente continua. Alcontrario de los sensores inductivos (de bobina),
son mucho más apropiados para la miniaturiza-ción y se pueden fabricar económicamente con los
medios de la tecnología de los microsistemas. Las
aplicaciones galvanomagnéticas (efectos Hall yGauB, figura 8), así como los elementos metálicos
anisótropos magnetorresistivos (AMR) de capas
delgadas, son los más extendidos.
3
1.ü)
L


Sensores de posición Principios de medicrón
Sensor Hall diferencial (sensor Hall doble)
Figura 10
a Estructura
b Desano o de campo
(paso ncrementa
de 1,5)
c Desarrollo de a señal
en función de ancho
del entrehierro 1-
I Corona dentada
2 Circu to integrado Ha
diferencial
P aqu ta de homogenei
zación (hreno dulce)
lman permanente
Figura 11
a Posición a
b Posconb
c Señal de salida
1 Culata magnét ca
2 Estator
(1,2 hierro dulce)
3 Rotor ( mán
permanente)
4 Entrehierro
5 Sensor Hall
,i Ángulo de rotacion
occ
:6ñó
Sensor angular Hall analógico ("imán móvil,,)de característica lineal para ángulos de hasta 1gO"
trolada de los electrodos, o la permutación cíclicade los electrodos y la promediación de la señal de
salida, se suprimen los efectos mecánicos pertur-badores (efectos piezorresistivos). Las influenciastérmicas, a menudo considerables, sobre la sensibi-lidad de medición no disminuyen sin embargo porello.
Táles circuitos integrados Hall son principal-mente apropiados para la medición de pequeños
recorridos (véase "Sensores de aceieración"), pordetectar las variaciones de campo magnético indu-cidas por el acercamiento o alejamiento de unimán permanente.
S e n s o r e s H all difer en ci ale s
Desde hace algunos años existen también sensores
Hall dobles ("disposiciones de sensores Hall dife-renciales", figura l0) en forma completamente in-tegrada. Dos sistemas Hall completos están
dispuestos en un chip a una distancia exactamente
definida, eyaluando la correspondiente electrónicala diferencia entre las dos tensiones Hall. La ven-
taja de esos sensores diferenciales radica en el he-cho de que su señal de salida es ampliamente inde-pendiente delvalor absoluto del campo magné-tico, detectando sólo la variación de la inducciónmagnética en el espacio, o sea, el gradiente de
campo (por eso también su frecuente designacióncomo "sonda de gradiente").
Thles sensores se utilizan generalmente para
medir velocidades de rotación, ya que la polaridadde su señal de salida no depende del entrehierroentre el rotor y el sensor. Para obtener una señal de
salida máxima, la distancia entre cada uno de losdos sensores Hall - dispuestos generalmente alborde del chip (oblongo) - corresponde a la mitaddel ancho del incremento (medio vano entre dien-tes).
Este máximo de la señal es muy ancho, es decir,
cubre un amplio sector de variación de la distanciaincremental. Toda diferencia mayor del ancho delincremento requiere sin embargo un "rediseño"
muy complejo y costoso del sensor.
Como sonda de gradiente, el sensor no puede ser
montado en cualquier posición, sino que ha de ser
orientado lo más exactamente posible en el sen-tido de rotación del rotor incremental.
Ia
(:'U
t:.:
cPtP
U:'1i
Angulo de rotac¡ón q _>

-.-;.-.,
::, úe
: -Jl-
::.iasi.::sibi-I irr frOf
'::---:--Ll5
.;rrr- -rdu-
-:
i: Sr)IeS
- :ir!-..:l in-
:::;-.::idad:-;:iO:;ial de: - I _--: 105
::: .11
-.: :llitad::: dien-
:- -;,
:-:t¿nCia
:::tl del
:i:io"
:.ie ser
:: de ser
.-.en-
-i j,:.iorss Hall para ángulos inferiores a 180o:
:.1:diante un anillo magnético ("imán móvil")y... ¡nas piezas conductoras fijas de hierro dulce se
: ...de obtener directamente, sin conversión, una.. .:l lineal de salida incluso para grandes márge-
. , :nsulares (figura I I ). Ello consiste en dirigir el
:.:rno bipolar del anillo magnético a través de un
,:,,strr Hall dispuesto entre dos piezas semicircula-
::: .onductoras de flujo. El flujo magnético efec-'. r que atraviesa el sensor Hall depende del án-
: -... de rotación E.
- ,cnsor angular Hall del tipo ARSI, que abarca
-.. ;rnpo de medición de aprox.90o, representa
-... concepción derivada del principio básico del
-:¿n móvil" (figura l2). El flujo magnético gene-
¡.-.'r por un rotor que tiene aproximadamente la
::la de un disco semicircular de magnetismo
- :::ranente, es reconducido al rotor a través de
-:..: zapata pola¡ de otras dos piezas conductoras
:: un eje asimismo ferromagnético. Una parte
-., tlujo, más o menos grande en función de la
: .ición angular, es conducida a través de las dos
- ,.2¿s conductoras, en cuya pista magnética se
: ,.uentra también un sensor Hall. De ese modo
Sensor angular Hall ("imán móvil")de característica lineal para ángulos de hasta 90",
Sensores de pos c o^
se puede obtener la característica casi lineal en la
mayor parte del campo de medición,
El tipo ARS2 se caracteriza por una disposición
más sencilla, sin piezas conductoras de magne-
tismo suave (figura 13). El imán se mueve aquí
sobre un arco circular alrededor del sensor Hall,El desarrollo sinusoidal de la curva característica
resultante posee una buena linealidad sólo sobre
un sector relativamente corto. Pero si el sensor
Hall está situado un poco fuera del centro del cír-culo, la curva característica se aparta en medida
creciente de 1a forma sinusoidal. Entonces presenta
un alcance corto de medición de escasamente 90o
y una sección bien lineal más larga de más de 180".
Hay que considerar como inconvenientes, sin
embargo, el reducido blindaje contra campos ex-
traños, la dependencia restante de tolerancias geo-
métricas del circuito magnético y variaciones del
campo del imán permanente en función de la tem-peratura y del envejecimiento. En cambio, un sen-
sor de este tipo se puede integrar mecánicamente
bien en un pedal acelerador o en un módulo de
pedal acelerador.
Sensor angular Hall ("imán móvil")
de caracterislica lineal para ángulos de hasta 180".
0s
l
.:.
mTaa
.s 60f
530cEU(úC^^ó -JUc^^o -OUo
mT
.q 60f
530ooU(ú
;-30c^^o -OUO
Tnl150
100
50
&ü)
c
ú:,t il
Figura 12
a Estructura
b Curva caracteristica y
campo uti A
I Rotor {de magnetismo
permanent.")
2 Zapata po ar
3 Pieza conductora
4 Entrehierro
5 Sensor Hall
6 Ele (de magnetismo
du ce)
Figura 13
a Princ p o
b Curva caracteristica
1 C rcu to ntegrado Ha
co ocado en e centro
de apstacrcular
2 CircLr to integrado Ha
desplazado de centro
( rnealizac on)
3 lnran
270" Angulo de rotación q,
.4.
/15" 90' 35"18b" eZS" ZZO' SrS\
Angulo de rotación q
Angulo de rotación q
-50

Sensores de posición Principios de medición
Sensor angular Hall digital LWS3 para ángulos de hasta360" con interruptores Hall sencillos equidistantesdispuestos en círculo.
Sensor Hall analógico para ángulos de 360',
Sensores Hall para óngulos superilres a l80o:
Los sensores de ángulo de giro de la dirección(tipo LWS3) son circuitos integrados Hall ("inte-rruptores Hall") muy sencillos, como los que se
utilizan para la medición de velocidades de rota-ción. Ellos permiten formar - junto con unpequeño imán permanente - sensores angulares
digitales con un alcance de medición de hasta
360". A tal efecto, para una resolución de n bits hay
dispuestos n interruptores Hall en círculo, a igualdistancia unos de otros (figura 14). Un disco de
codificación de hierro dulce intercepta o deja pa-
sar el campo producido por los diversos imanes
permanentes que se encuentran encima, de ma-nera que los interruptores Hall generan sucesiva-
mente n palabras de código diferentes con cada
r,uelta del disco. A fin de evitar grandes errores de
indicación en los estados intermedios, se utiliza el
código Gray.
Para realizar un sensor de ángulo de giro del
volante de dirección, se une fijamente p. ej. el disco
de codificación con el husillo de la dirección y el
resto del sensor con el chasis.
Elnúmero de vueltas del volante se puede de-
tectar con una sencilla disposición adicional de
3 bits, cuyo disco de codificación es movido a tra-vés de un engranaje reductor. La resolución de ta-les disposiciones no es en general mayor de 2,5o.
Se forma un sensor angular Hall analógico con unalcance de medición de hasta 360" (figura 15)
cuando se gira en la manera representada un imánpermanente sobre una disposición en ángulo recto
de dos sensores Hall. En este caso los dos sensores
Hall están orientados paralelamente al eje de rota-ción del imán permanente, de modo que detectan
cada uno los componentes x e y del vector de in-ducción B que gira sobre ellos:
Uat = U*- B sin rp
Uuz= Uy= B cose
Partiendo de estas dos señales es fácil calcular el
ángulo E por medio de la relación trigonométricag = arctan (Un I Unz) y de un correspondientechip de evaluación ya comercializado. Una confi-guración semejante de sensores Hall se puede ob-tener también de la manera representada mediante"VHD'(Vertical Hall Devices) por tecnologíaplanar, de modo que el plano del chip del sensor
ril@
xü
Figura 14
1 Tapa de la cqa con
imanes permanentes
2 Disco de codificación
3 Placa de circuitos
impresos con
intenuptores Hall
Figura 15
a Formación partiendo
de circuitos integrados
Hall discretos
b Formación partiendo
de circuitos integrados
Hall en tecnología
planar'l Elecfónica de señal
2 Árbol de levas
3 lmán de mando
B lnducción
1 Corriente
U Tensión
Ua Tensión de salida
r¡ Ángulo de rotación
3
:oou:(:t
hmuüMT
@hhL[d{U
IÉl[
úiU&rqIilq
F&flud&I
FhhüFqFt[Iütd
Iü-
oou:(¿)
I

...
:l:"inte-
( - rrLd-
:.
--:res¡:J: ::ts hay
: isual.-- l-rt\r.Ld
:-::test---..: -itd-
:-3si!a--.1.-JUd
:.rres de
:::-iiza el
:r Jel'. el disco
-i_ l-:-i úC-
- -- I -: tl(
i: : tra--- i. t"
: - a :c
'- .tr0 Ull
i -:-: imán
;-.rr recto
t:tsores: ie rota-
i3:ectan
: ie in-
esté perpendicular al eje de rotación. La integra-
.ión monolítica gannfiza también una aita preci-
,ión de la disposición necesaria en ángulo recto
le los dos sistemas Hall.
:¡nsores diferenciales r.uagnetorresistivos
El efecto de resistencia o efecto GauB ya mencio-
rado anteriormente y específico de las plaquitas
:erniconductoras es aprovechado en las "magneto-
:resistencias", que se fabrican a partir de un "semi-
;irnductor III-V'I de antimoniuro de indio crista-
.:no (lnSb). Al contrario de los sensores Hall, la
-orma óptima de la plaquita de una magnetorresis-
.¡ncia es más bien corta y compacta, constituyendo
:lectricamente por tanto una resistencia al
:omienzo muy baja. Para obtener valores técnica-
:lente utilizables del orden de kQ, muchas de estas
:laquitas han de estar conectadas en serie. Eso se
:rrnsigue airosamente incorporando agujas
:ricroscópicas de antimoniuro de níquel de alta
:¡nductibilidad en el cristal semiconductor,
:ispuestas perpendicularmente al sentido de la
.!rrriente, así como formando adicionalmente
:reandros al nivel de la resistencia semiconductora
.iguras 16 y 17a).
Las magnetorresistencias se depositan en
.eneral sobre un substrato de ferrita, con objeto
:e reducir a un mínimo el entrehierro activo al
,;r montadas en circuitos magnéticos. Como su'. ¡lor de resistencia depende en gran manera del
:¡sarrollo de la temperatura (reducción de aprox.
-n -i0 %o por encima de 100 K), se suministran
.eneralmente sólo como disposición doble
-ormando un circuito de divisores de tensión
nagnetorresistencias diferenciales). La regulación
:agnética de cada una de las dos resistencias
:arciales ha de tener lugar luego, en la aplicación
:espectiva, a ser posible en sentido contrario. A
:esar del alto coeficiente de temperatura de cada
:esistencia, el circuito de divisores de tensión ga-
:antiza sin embargo una estabilidad muy buena
delpunto de simetría (punto de funcionamiento),
en ei que las dos resistencias parciales alcanzan el
nismo valor.
Las magnetorresistencias se suministran habi-
tualmente en cinta, en un embalaje semejante al de
un filme "súper 8" (figura 17 b).
Sensores de posición
Act¡vación magnética de un sensor magnetorresistivo diferencial para la exploración de una rueda dentada (medición deángulo incremental, detección de la velocidad de rotación).
Sensor diferencial maonetonesistivo
Un recubrimiento de cobre estructurado ofrece en
esta forma un modo de unión ventajoso de la co-
nexión interna de semiconductor con el contacto
de montaje externo.
Figura 16
1 lVlagnetonesstencias
1ir, 112
2 Sustrato de mater aJ
magnét co duice
3 lman permanerte
4 Rueda dentaca
t ¡ Tens on Ce
a rmeniaa :-[ ¡ Tensron ce s: :: ::':-
un ancL a :: -:::_ :-
Figura 17
a Vista en el microscopio
(detalle)
b Sobre sustrato de
ferrita en soporte "filme
súper 8"
UZ
2

Sensores de posición Principios de medicron
Con miras a sus aplicaciones en el automóvil, esos
sensores están concebidos en el entretanto para so-portar una temperatura continua de servicio dehasta 160 "C y una breve temperatura de punta decasi 200"C. La variación de la resistencia en funciónde la inducción magnética B tiene lugar hasta valo-res de aprox. 0,3 T de manera proporcional al cua-drado de Ia inducción; más allá de esos valores, laresistencia se !.uelve progresivamente lineal. Haciaarriba, el margen de equilibrado dinámico es ilimi-tado; para las aplicaciones técnicas, el comporta-miento en función del tiempo puede considerarse
como prácticamente exento de inercia de respuesta.
A fin de obtener una buena sensibilidad demedición, es conveniente utilizar las magnetorresis-tencias en un punto de funcionamiento de
0,1...0,3 T. La tensión de polarización necesaria la su-ministra en general un pequeño imán permanente,cuya acción puede ser amplificada mediante un pe-
queño deflector. Sin este imán de polarización, lasensibilidad de medición del sensor sería práctica-mente nula. Para la medición de un recorrido o de
un ángulo, sobre la disposición del sensor se mueveen la mayoría de los casos una pequeña pieza con-ductora de material magnético dulce; en posiciónmedia simétrica, esta pieza conductora equilibra las
dos resistencias del sensor, pero fuera de la posiciónmedia ocasiona un desequilibrado del divisor detensión,1o que induce tensiones de salida de buenalinealidad ¡ por consiguiente, una alta sensibilidadde medición, Por razónde su importante variacióntérmica residual, la magnetorresistencia encuentraaplicación casi exclusivamente en medidores incre-mentales de ángulos y velocidades de rotación o sen-sores binarios de valores límite (con característica deconmutación).
La ventaja de las magnetorresistencias es su alto nivelde señal que, incluso sin amplificación, se halla gene-
ralmente dentro del margen de algunos voltios, 1o
que hace innecesario el montaje de una eiectrónica yla toma de las correspondientes medidas de protec-ción. Además, en su calidad de componentes pasivos
resistivos son muy insensibles a perturbaciones elec-tromagnéticas;por razón de su alto campo de pola-rización son también casi inmunes a campos mag-néticos perturbadores (para ejemplos de aplicación,véase el capítulo "sensores de veiocidad de
rotación").
Scrrsorcs ntaqnetollcsistivos cle capas dcltatlas lr
b¿sc dr'NiFc (AIil{)Los sensores magnetorresistivos de capas deigadas
a base de NiFe (AMR Anisotrop MagneroResistive, de capas delgadas de 30...50 nm de
NiFe, llamado también Permalloy) hacen posiblela formación de sensores angulares sin contactoextremamente compactos. La resistencia eléctrica
de una pista conductora es anisótropa, es decir, en
el sentido del vector de magnetización es algunostantos por ciento más alta que la correspondienteal sentido transversal a este vector.
Sin campo de mando externo, se establece unapequeña magnetización espontánea en ei sentidolongitudinal de la pista conductora (anisotropía de
forma). A fin de darle un sentido definido - teóri-camente podría presentar un sentido inverso -, lossensores AMR se equipan a menudo con un débilimán de premagnetización. Si el vector de magne-tización es girado alrededor del ángulo E bajo el
efecto de campos exteriores, la resistencia dismi-nuye poco a poco hasta alcanzar su valor mínimoa e = 90o. La resistencia depende sólo del ánguloq, que es delimitado por la magnetizacióny la co-rriente, y ella presenta un desarrollo casi cosenoi-dal en función de q. Si el campo exterior es muchomayor que la magnetización espontánea (lo que es
generalmente el caso con imanes permanentes pi-loto), entonces en la práctic a el sentido del campo
exterior exclusivamente determina el ángulo Eeficiente. El valor del campo magnético no desem-peña ya ningún papel, es decir, el sensor funciona"en saturación".
Unas tiras de cortocircuito altamente conducti-vas (p. ej. de oro) sobrepuestas a la capa AMR obli-gan a la corriente a fluir bajo un ángulo de 45"
contra la magnetización espontánea (sentido lon-gitudinal), aun sin generación de un campo exte-
rior. Gracias a este ardid - llamado "sensor
Barberpol" - se desplaza la característica del sensoren 45o en relación con la de una resistencia senci-lla. Ya con un campo magnético exterior nulo, ellase encuentra pues en el punto de sensibilidad má-xima de medición (punto de inversión). La dispo-sición en estrias de sentido lpuestl de dos resisten-
cias hace también que el valor de cada una de éstas
varíe en sentido inverso bajo el efecto del mismocampo, es decir, que mientras una se vuelve mayor,disminuya la otra simultáneamente. Sirven de ma-
l
:"
ú


Sensores de posición Principios de med c on
cias de puente llega a alterar demasiado la formasinusoidal de la señal, siempre que el ancho de esos
meandros no sea inferior a un valor prefijado.Otra condición previa para una alta precisión
de este principio de sensor es como mínimo que elcampo magnético tenga el mismo sentido en am-
Forma de puente completo utilizadalécnicamente para el sensor "pseudohall".
u l,uV
b Lh = const . arctan (L sl U¿2\
0 180.
Ángulo de rotación E --,->
Diseño de dos puentes AMR entrelazadosdesplazados en 45o.
bos puentes (el valor no tiene importancia a partirde determinada intensidad),lo que, en realidad,
sólo se puede garantizar si los dos puentes están
superpuestos. Se pudo encontrar un diseño en el
que los dos puentes se entrelazan desplazados unode otro en 45o, de tal manera que los puentes se
pueden considerar como si se encontraran en el
mismo punto y casi uno sobre el otro (figura 21).
Una ventaja esencial de estos sensores según el
principio "pseudohall" es que son ampliamenteindependientes del valor del campo de mando, al
contrario de las correspondientes versiones de los"verdaderos" sensores Hall, Desde el momento en
que este valor ha sobrepasado determinada magni-tud, la señal de salida depende sólo del ángulo del
campo de mando. La razón de ello radica en el
hecho de que los sensores funcionan dentro del"margen de saturación'] en el que el ángulo de la
magnetización interna espontánea se ha ajustado
prácticamente por completo al sentido impuestodesde fuera. No hay que exigir pues ningún valorconstante del campo de mando, sino sólo ciertahomogeneidad direccional en el punto de medi-ción. El envejecimiento de los imanes y de las
piezas conductoras magnéticas, así como las tole-rancias y variaciones de los entrehierros, apenas
tienen importancia en este principio de sensor.
Mediante una disposición doble de "sensores
pseudohall de ángulo de rotación" se pueden
medir varias vueltas de una pieza rotativa (p. ej,
un husillo de dirección). La pieza en rotaciómueve los dos imanes permanentes a través de
dos pequeñas ruedas dentadas altamente multipli-cadas. Como una de las dos ruedas dentadas tieneun dienfe más que la otra, su posición de fase recí-
proca constituye una clara medida de la posiciónangular absoluta. Además, cada sensor no ofrece
por sí solo ninguna resolución precisa del ángulode rotación. La disposición descrita con dos senso-
res permite por el contrario, p. ej. en un campo
total de ángulo de giro de la dirección de cuatrovueltas completas, una resolución muy exacta,
superior a 1o.
i
"llnit
lllLi
:ütu
:rltirlu
lüti1
::lilillii
,liuixl
lur
1l
llll:
Figura 20
a l\lonta1e en puente
b Señal de salida {r¡ de
circuito de evaluacion
ü Inducción de mando
/y Corr ente de
aiimentación
{ ¡, Tensiones de med ción
['ut
9 Ángulo de rotacrón
lj
:..:
-lU'
rül:
:ll
!-1í;lt'
rlur
,- Li
iei:
&
Z::i
360"
lI
I
^.F::2 0oa:6o->oLU¡
ouZ¡,ll
uA

iensores GMR
Desde fecha reciente existen también sensores
rragnetorresistivos GMR realizados en "nanotec-
rología'l con varias capas delgadas superpuestas
Je un espesor correspondiente a pocas capas ató-
:ricas (figura 23). Su comportamiento es muy
:e mejante al de los sensores AMR, pero su efecto
:e medición es mucho mayor (figura 22). Al con-
::ario de los sensores AMR, la resistencia de los
rnsores GMR (en disposición "pseudohall")
iepende sólo del simple ángulo de rotación y nojel seno del ángulo de rotación mecánico doble.
?rrr consiguiente, es posible determinar claramente
:i ángulo de rotación en todo el campo circular
:e i60o.
,-.:oscopios (sondas de campo magnético
. =:restre)
-Lrs sistemas de navegación montados en los auto-
:oviles requieren un sensor angular de tipo muy
:iterente. Por lo menos en bifurcaciones y crucesje carreteras hay que medir el ángulo del sentido
i: marcha tomado (ángulo de rumbo), indepen-
ientemente de la existencia de un sensor del án-
¡¡lo de dirección. Antes de que se dispusiera de
j.nsores inerciales adecuados (señal de sensor
:¿ convolución integrada en función del tiempo),
=e utilizaron a tal efecto sensores de campo mag-
:etico terrestre ("sondas de núcleo de saturación",
-gra 24), que determinaban el sentido de marcha
:. base del campo magnético terrestre (brújulas).
Comparación entre sensores AMR (a) y sensores GMR (b).
Sensores de posidrx >-.: : ':: o: -€a ; :^
Sensor GMR individual (estructura).
Núcleo sensor de la sonda de campo magnét¡co teresfe(principio).
----- --- l¡
l
25
n a partirdidad,
s están
no en el
rdos uno
ntes se
nenel
;ura 21).
¡ln el
mente
nndo, al
:s de los
nento en
da magni-
ryulo del
¡enelruo del
ilo de la
aiustado
npuesto
ún r-alor
¡ cierta
e medi-
le las
¡ las tole-
,¿Penas
Ensor,
ül5'ores
dena tp. ej.
Eiór¡-es de
:multipli-das tiene
e fase recí-
posición
o ofrece
d ángulo
dos senso-
campo
B cuatro
5acta,
1
1
N@oaU2
Figura 23
1 Capas de Fe
2 Capas delgadas
de CuCo anti-
ferromagnéticas
B lnducción de mando
q Ángulo de rotación
Figura 24
1 Anollamiento de sensor
(eje x)
2 Anollamiento de sensor
(eje y)
4
B
Anollamiento de
excitación
Núcleo anular
Campo de medición
(componente horizontal
del campo magnético
teneslre)
ooÉv3
a 9=t8o'
rb ffi\\-Á,2./*'mF
E¡c6)@aú
o-('c'of
L¡J
Ercoo(ú
o!c'6lolr¡
-180' 0
Ángulo de rotación E
Laoa€ouz@
E = 360"
GMR

Sensores de posición Principios de med c ón
Sensores de propagación de ondasPara la medición de distancias en el automóvil sona propósito procedimientos ultrasónicos de medi-ción del tiempo de propagación (zona de accióninmediata de 0,5...5 m), procedimientos ópticosde triangulación o medición del tiempo de propa-gación mediante la luz del campo infrarrojo inme-diato (lidar; zona de alcance medio de hasta 50 m)y 1a detección por radar electromagnético (zona deacción lejana de hasta 150 m).
Sensores acústicos (ultlasónicos)
Análogamente al procedimiento de ecosondeo, lossensores emiten impulsos ultrasónicos de una fre-
Diagrama de radiación de antena de un sensor ultrasónico.
0"
cuencia de aprox. 40kHz (figura 25) y detectan eltiempo que tardan en llegar los impulsos de eco
reflejados por obstáculos. La distancia a que hayhasta el obstáculo más cercano se calcula a partirdel tiempo de propagación del primer impulso de
eco llegado t y de la velocidad del sonido c en el
aire de aprox. 340 m/s (véase Ia figura26):a = 0,5. te'c
Sensores electt oru¿rgnéticos ( rad¿rr )
Un sensor de radar de largo alcance está integradopor ejemplo en el sistema ACC (Adaptive CruiseControl), que es un regulador de la velocidad de
marcha con detección automática de vehículos quemarchan delante en el mismo carril y exigen even-tualmente una deceleración del automóvil propio.La frecuencia de trabajo de76 GHz (longitud de
onda de aprox. 3,8 mm) hace posible una cons-trucción compacta, requerida para el empleo en
vehículos. Un oscilador Gunn (diodo Gunn dentrode una caja ecoica) alimenta en paralelo tres ante-nas patch dispuestas en luxtaposición, que sirvenal mismo tiempo paralarecepción de las señales
reflejadas (figura 27). Una lenre de plástico colo-cada delante (lente de Fresnel) concentra el haz de
rayos de emisión dentro de una ventana angularde +5o en el plano horizontal y de +1,5o en el
n:Figura 25
1 Vertical
2 Horizonlal
Figura 26
a Distancia para'
choques/obstáculo
b Distanc a sensor 1/
obstáculo
c Distancia sensor 2/
obstáculo
d Distancia sensor l/sensor 2
1 Sensor emisor y
receptor
2 Sensor receptor
3 Obstáculo
Cálculo ultrasónico de distancias respecto a un obstáculo único (ejemplo)
O).:ir
(d2+cz-fu2)z

.:-:cal, referida al eje del vehículo. Por el despla-
.::riento lateral de las antenas, la característica de-:-'::ción de éstas (ancho de 6-dB :4o) señala en
- .::entes direcciones. Además de la distancia de
, '.:hículos que marchan delante y de su veloci-
- . - :e lativa, se puede averiguar de ese modo tam-
.: .¿ dirección en la que son detectados. Unos
- - :.¡dores direccionales separan las señales emi-' -,, de las señales recibidas. Tres mezcladores
: ,:,rnectados transponen la frecuencia de recep-
: - in bajas frecuencias casi hasta el cero (0...300
. ---- . nediante su mezcla con la frecuencia de
: -.,::t.rrr. Las señales de baja frecuencia son digita-
: - :is para su ulterior evaluación y sometidas a
- - :':ido análisis de Fourier para determinar la--:: ..itlCi0.
-: Irecuencia del oscilador Gunn se compara
. -.r:luamente con la de un oscilador estable de
': :::ncia DRO (Dielectric Resonance Oscillator),
:-irr regulada a un valor teórico prefijado. A la
:- :; \'irtía la tensión de alimentación del diodo
. -,.:. hasta que corresponde de nuevo al valor': r-,tr. Para la medición, a través de este bucle de-.
- --:ción se aumenta y reduce brevemente la fre-
- -:r..ir del oscilador Gunn cada 100 ms alrededor
-. -' i \lHz en forma de dientes de sierra (FMCW
i:.:--encv Modulated Continuous Wave). La se-
'- :.tlejada en un vehículo que marcha delante
-._: un retardo relacionado con el tiempo de pro-
- -:.;ión de la onda (que se traduce en una dismi-
Sensor y unidad de control ACC (esquema de conlunto)
Acoplador direccional
Punto dealimentaciónde la antena
nución de la frecuencia en el flanco ascendente v
un aumento igual de la frecuencia en el flanco des-
cendente).
La diferencia de frectencia lf es directamente
proporcional a la distancia (p.ej,2 kHz/m). Si los
dos vehículos empero no marchan a la misma ve-
locidad, la frecuencia de recepciónf, aumenta en-
tonces por razóndelefecto Doppler, tanto en el
flanco ascendente como en el descendente, en unvalor Af¿proporcional a la velocidad reiativa (p. ej.
512H2 por m/s), es decir, resultan dos divergen-
cias de frecuencia diferentes lf V /fr. Su suma da
la distancia, su sustracción la velocidad relativa de
los vehículos (figura27). Con este método se pue-
den detectar y seguir incluso varios vehículos
(hasta 32).
Medición de distancia y de velocidadpor radar FMCW
Sensores de pos c c'
..:¿n eli - - -^-: (!u
-; :la\'
. :¿rtil: --..r de
,.nel
I GHz
- 76,36'6Cofooü 76,0
Alimentación +BV
Señal de activacióndel oscilador Gunn
Tensión de mandoen diente de sierra
de la frecuencia
Alimentación +5V
2 Señal radar izquierda
Señal radar central
2 Señal radar derecha
Figura 28
/s Frecuenc a de
emsón
/,//" Frecuencia de
recepción sin/con
velocidad re ativa
J/¿ Aumento de ia
frecuenc a por efecto
Doppler (ve1oc dad
re ativa)
J¡s/ Frecuencia de
l/r! dferenciasn/con
velocidad relativa
Figura 27
/:1-1- FrecuencyLocked
Loop
Iq)
óU
=
\rl-'ll,¡
: Masa
---
o,a
oL!:it--
A¿ Af,l¡rñ.-
^f"
\t, JE
I^f//.^l¡
Tiempo r --->
Bucle deregulación
de frecuenciaFLL.ASIC
Preamplificadorde 3 canales
ASIC
Mezclador

Sensores de posición Potenciómetro de plato sonda
Potenciómetro de plato sonda
AplicaciónUn potenciómetro detecta la posición (ángulo degiro) del plato sonda en la sonda volumétrica deaire del sistema de inyección de gasolina KE-fetro-nic. EI movimiento de este plato sonda, que sólosufre un retardo insignificante en relación con elmovimiento de la mariposa, determina la veloci-dad de aceleración. Esta señal, que corresponde a
la variación de la cantidad de aire aspirado en frrn-ción del tiempo (o sea, aproximadamente a la po-tencia del motor), la suministra el potenciómetrodel plato sonda a la unidad electrónica de control,que activa el actuador de presión electrohidráulico(figura 2).
Potenciómetro de plato sonda (esquema simplificado).
Potenciómetro de plato sonda en la sonda volumétrica deaire de la KE-Jetronic (esquema).
En función del estado de funcionamiento delmotor y de la señal de corriente condicionada porla unidad de control, el actuador de presión varía a
su vez la presión en las cámaras de depresión de las
válvulas de presión diferencial del distribuidor do-sificador de combustible ¡ con ello, el caudal de
combustible dosificado para las válvulas de inyec-ción.
Estructura y f uncionamientoEl potenciómetro de Ia sonda volumétrica de aireestá construido según la técnica multicapa sobre unsubstrato cerámico. Se trata de un sensor angularpotenciométrico que aprovecha para la medición laproporcionalidad existente entre la longitud de unaresistencia de capas (pista conductora) y su valoróhmico. La curva característica del potenciómetrono es lineal, a causa de la variación del ancho de lapista. Por ello la señal de aceleración presenta su
amplitud máxima en el caso de un movimientopartiendo de la posición de ralentí. Ella disminuye a
medida que aumenta la potencia del motor.Un cursor de escobilla se desliza sobre la pista
del potenciómetro. La escobilla se compone de va-rios alambres muy finos soldados a una palanca.
Los diversos alambres ejercen una presión redu-cida sobre la pista resistiva, siendo el desgaste portanto extremamente bajo. Merced al gran númerode finos alambres, el cursor garantizaun buencontacto eléctrico incluso en caso de ser rugosa Iasuperficie de la pista y de producirse movimientosmuy rápidos. La palanca del cursor está sujeta aleje de la palanca del plato sonda. Ella está aisladaeléctricamente de este eje. La tensión del cursor latoma un segundo cursor de escobilla, que está
unido eléctricamente con el cursor principal (fi-gura 1),
El cursor puede salir hasta más allá del campode medición por ambos lados, estando descartadopor tanto un deterioro en caso de reflujos repenti-nos de la corriente de aire en el tubo de admisión.Una resistencia eléctrica fija, r ealizada asimismoen técnica multicapa, está conectada en serie alcursor para proteger el potenciómetro contra cor-tocircuitos,
jm¡[ü
ilfrÍñnt:
iillmiÍn
milü
gr
m&mü
uisqür
,mr I
rMÍmnlillfm|l¡f
ilüm
.&ü1r,1
MN
im.
irll¡ ti
Irnfliüü
Umrd
mü5n
rlt¡O
Eür5 rüt
:Ínnlllt
]Iüü[
Jüü ,ltf,-11
iüW ¡
!rf,.fÍ{ñr
3rH!
,üiümi
.IlüthM
füa]
-¡&:!um:!¡
iimmle
;:iittirL
-]llt 3'irrltlll
Figura 1
1 Escobilla detectora
2 Escobrila principa
3 Palanca de cursor
4 Eje de la sonda
volumétrica de aire
5 Pacade
potenciometro
6 Prsta de deteccrón
7 Pista de medición
Figura 2
1 Distribuidordosifica
dor de combustible
2 Actuador de presron
electrohidrául co
3 hacia la unidad de
control
Sonda volumétnca
de aire
Plato sonda
Potenciómetro
Caudal de a re
o
:e)
5
6
Qt
o
)(:¡)

- : -l
:: for: ', lria a
,: .le las
;-.: do-, .t,
_:"'ec-
.: ::re
. --ar
-;:!rn la
i:e una_,_:,
t-l f
.:letro- i,l ,
:: ]u
:-::ufe a
.::lPO\::tadO::renti-::l:ión.:--!:uo_ - .t- -i Jl
t::f cor-
Sensor de mariposa
:: cación:-.. .:nsor detecta el ángulo de giro de la mari-
. ,' je aire del motor de gasolina. Los motores
, -'-.:ldos con el sistema M-Motronic disponen
, -: rna señal de carga secundaria que es utili-
- -. :rtre otras cosas como información adicional
- . -:nciones dinámicas, para identificar el régi-
-. , je funcionamiento (ralentí, carga parcial,
: : : ;arga) y como señal de marcha de emergen-
- , :r. c¡1so de fallar el sensor de carga principal
r.::dor de masa de aire). Para el empleo del sen-
: :e mariposa como sensor de carga principal se
- -,::ue la precisión necesaria mediante dos po-' : ,.!rmetros para dos campos angulares.
:. nar motor exigido lo ajusta el sistema ME-
- .:rrnic mediante la mariposa de aire. Para com-
- : r:r si 1a mariposa ocupa la posición calculada,
- - ::nsor adecuado evalúa la posición de Ia mari-
, ,. regulación de la posición). Para asegurar el--.---:onamiento, este sensor posee dos potenció-
- :-:os Qü€ trabajan en paralelo (redundancia)
- , :ensión de referencia separada.
istructura y funcionamiento
- .=nsor de mariposa es un sensor angular poten-
- .:retrico de una (o dos ) curva(s) caracterís-'-. s lineales.
-t'rS cursor€s fijados en el brazo detector sujeto
- .:'¡ol de la mariposa se deslizan a lo largo de
., :istas resistivas correspondientes. El ángulo
:: .iro de la mariposa es convertido así en una
::.=;iór de tensiones U ¡lUy proporcional a este
.-:.rlo (figura 2), siendo la tensión de funciona--.:nto Uv = 5V. La conexión del cursor se efectúa
::-iralmente a través de una segunda pista de
- ::acto de iguai superficie, que tiene empero
-.--¡jo una capa de material conductor de bajo
:riaje(figurasIy3).Como protección contra sobrecargas, está apli-
:.,¡ la tensión a la pista de medición a través de
:::_ueñas resistencias en serie (también para el ca-
::¿do del punto cero y de la inclinación de la
:,:acterística). Una variación del ancho de la pista
-. nedición (incluso en secciones) repercute en la
:ina de la curva característica.
Sensores de posición Sensor de mariposa
Sensor de mariposa (estructura)
Sensor de mariposa de dos lineas caracteristicas.
Sensor de mariposa (circuito)
ü
:.J
-<li!t-
c)c.o@qc)o:(fc.o'6(ú6cc
Figura 1
1 Ele de mariposa
2 P sta resist va 1
3 Pstaresstva2
4 Srazo con cursor
5 Conexion eléctr ca
(cuadripolar)
Figura 2
A Tope nterno
1 Linea caracteristlca
para alta resoluc on
en e margen angular
0".. 23"
2 Línea caracteristica
para margen angular
15" ... 88'
{'c Tens on de
alimentación
{ ¡ Tensión de medición
i y Tensión de
func onamiento
¡rvr' Angulo de medic ón út I
Figura 3'1 lVlariposa
2 Sensor de mar posa
f 'n Tensión de medición
{'y Tens ón de
funcionamlento
Rr, /i: Pistas resistivas
1y2/i3, /la Resistenc as de
equ librado
R¡, /i¡ Res stencias de
proieccion
I6
)Q¡)
:
Angulo de rotación (t,

Sensores de posición Sensores de anillos de cortocircuito semidiferencial
Sensores de anillos decortocircu ito sem idiferencial
AplicaciónLos sensores de anillos de cortocircuito semidife-rencial son sensores de posición para Ia detecciónde recorridos o ángulos. Estos sensores, llamadostambién transmisores de cortocircuito semidife-rencial, son muy precisos y robustos. Se empleancomo:
. sensor dei recorrido de regulación para detectarla posición de la varilla de regulación de lasbombas de inyección Diesel en línea y
a sensor de ángulo en el mecanismo de controlde caudal de las bombas rotativas de invecciónDiesel.
Estructura y funcionamientoLos sensores (figuras I y 2) consisten en un núcleode hierro dulce chapeado. En sendos brazos delnúcleo hay fijadas una bobina de medición y unabobina de referencia.
Cuando fluye corriente alterna a través de lasbobinas procedente de la unidad de control, se ge-neran campos magnéticos alternativos. Los anillosde cortocircuito de cobre que encierran el brazorespectivo del núcleo de hierro dulce protegen es-
tos campos magnéticos. El anillo de cortocircuitode referencia está fijo, mientras que el anillo decortocircuito de medición está sujeto a la varilla deregulación o al árbol de la corredera de regulación(recorrido de regulación s o ángulo devariación q).
Estructura del sensor del recorrido de regulación parabombas de inyección en línea Diesel.
I u,"
tri
Con el desplazamiento del anillo de medición se
modifica el flujo magnético y con él la tensión en
la bobina, ya que la unidad de control mantienela corriente constante (corriente aplicada).
Un circuito de evaluación conforma la relaciónentre tensión de salida U¡ ytensión de referenciaUp.1 (figura 3). Esta relación es proporcional a ladesviación del anillo de medición y puede ser eva-
luada por la unidad de control. La pendiente de
esta curva característica se puede ajustar com-bando el anillo de referencia, y el punto cero, me-diante la posición normal del anilio de medición,
Estructura del transmisor de anillos de cortocircuitosemidrferencial para bombas rotativas de inyecciónDresel.
60"
Relación de tensión en función del recorrido deregulación.
demedición lineal(aorox. 30 mm)
Reconido deregulación.i +
slm
lilnuur
lllllultiill
'lllt
&lu
,{ür
15fim
ü¡mil
$ui'lllilÍü1
Figura 1
1 Núcleo de hteno
dulce
2 Bobina de referencra
3 Ani lo de cortocircuito
de referenc a
4 Varll a de regu ac ón
5 Bobina de med ción
6 An Ilo de cortocircuito
de medición
' Recon do de a varil a
de regulac ón
Figura 2
1 Bob na de medic on
2 Anil o de cortoc rcu to
de medición
3 Núcleo de hieno
dulce
4 Árbol de la corredera
de regulación
5 Bobina de referencia
6 Anillo de cortocircuito
de referencra
9 ,,n, Campo del ángu o de
regu ac ón del árbol
de la corredera
17 Ángulo de medrc on
Figura 3
{ a Tensión de salida
['p"1 Tensión de referencia
¡lüüllll
d;tillllllll
rü til
üürllll¡
fi'f,n
*[r:iriiur
.lüu
¡.!:!lt:
Er0r, r
.üllüiilllt
rmÍu
utJ
J¡OII
ltiülllj!
ütiüuülr
ümü
,Iuu :l
uuu
r':L'it
glr:rt ir
"l¡ll¡frgt 'ór5J
La+o
:,lt
ou)(¡!)
(.-l

Sensor de nivel de combustible
Aplicación
-. iarea de este sensor es detectar el nivel actual de
-.rado del depósito de combustible y transmitir
-:¡ señal correspondiente a la unidad de control
-. al instrumento indicador en el cuadro de ins-
::-:rentos del vehículo. funto con la electrobomba
:: ;ombustible, el filtro de combustible, etc.,
::.¡ sensor constituye una parte integrante de las
-..-dades que están montadas en los depósitos de
¡.:.rlina o gasóleo y aseguran la alimentación fia-
.. lel motor con combustible (figura 1).
!structura:. .¡nsor de nivel (figura2) consta de un poten-
- . :retro encapsulado estanco al combustible y co-- ---:ado en forma de resistencia variable, un brazo
-.:. cursor (resorte cursor), conductores impresos
- rtacto doble), una placa portarresistencias y
- : eriones eléctricas. La palanca en cuyo extremo.: .rcuentra el flotador (orientable o fijo, en fun-
: ,: de la aplicación) de nitrófilo resistente al
- -:bustible, está fijada en el eje giratorio (pivote)
-:. :otenciómetro y, por tanto, también en el re-. ::3 cursor. El diseño de la placa portarresisten-
- ,, i' la forma del flotador y de su palanca están
-:.:tados a la conformación respectiva del depó-
.. Je combustible.
=.¡ncionamiento-- '.'¡¡iar el nivel de combustible, el brazo detector'
.:rente unido a través del pivote con la palanca
-:. -lotador, se desliza con sus cursores especiales
:.:raches chapeados para contactos) a lo largo de
-: :istas resistivas del potenciómetro doble. En-- :..es transforma el ángulo de giro del flotador en
, : relación de tensiones proporcional al ángulo.'-
-. rs topes de fin de carrera limitan el margen an-
. --:r de 100" para los niveles mínimo y máximo e
.--.:iden simultáneamente la producción de tra-
- -::eOS.
-a tensión de funcionamiento es de 5...13 V.
Sensores de posición
Sensor de nivel de combustible (esfuclura).
31
J:!rII Se
:!:rrn en
:-:iene
::ra,
Figura 1
1 Depósito de
combustible
2 E ectrobomba de
combustible
3 Sensor de n vel
4 F otador
Figura 2
1 Conexioneseléctricas
2 Resorte cursor
3 Remache chapeado
para contacto
4 Placa porta-
rres stencias
5 P vote
6 Contacto doble
7 Palanca de flotador
8 Flotador
9 Fondo del depósito
de combustible
f-
)I
1
:
Ln:o
==> )
Sensor de nivel de combustible en el depósito
:.:!,

30 Sensores de posición Sensores de anil os de cortocircuito semidiferencial
Sensores de anillos decortoci rcuito semidiferencial
AplicaciónLos sensores de anillos de cortocircuito semidife-rencial son sensores de posición para la detecciónde recorridos o ángulos. Estos sensores, llamadostambién transmisores de cortocircuito semidife-rencial, son muy precisos y robustos. Se empleancomo:
. sensor del recorrido de regulación para detectarla posición de la varilla de regulación de las
bombas de inyección Diesel en línea y. sensor de ángulo en el mecanismo de control
de caudal de las bombas rotativas de inyecciónDiesel.
Estructura y funcionamientoLos sensores (figuras 1 y 2) consisten en un núcleode hierro dulce chapeado. En sendos brazos delnúcleo hay fijadas una bobina de medición y unabobina de referencia.
Cuando fluye corriente alterna a través de lasbobinas procedente de la unidad de control, se ge-neran campos magnéticos alternativos. Los anillosde cortocircuito de cobre que encierran elbrazorespectivo del núcleo de hierro dulce protegen es-
tos campos magnéticos. El anillo de cortocircuitode referencia está fijo, mientras que el anillo decortocircuito de medición está sujeto a la varilla deregulación o al árbol de la corredera de regulación(recorrido de regulación s o ángulo de
variación E).
Estructura del sensor del recorrido de regulación parabombas de inyección en linea Diesel,
* ttr"'
1,,I t¡
Con el desplazamiento del anillo de medición se
modifica el flujo magnético y con él la tensión en
la bobina, ya que la unidad de control mantienela corriente constante (corriente aplicada).
Un circuito de evaluación conforma la relaciónentre tensión de salida Ua y tensión de referencia
Uq.1 (figura 3). Esta relación es proporcional a ladesviación del anillo de medición y puede ser eva-
luada por la unidad de control. La pendiente de
esta curva característica se puede ajustar com-bando el anillo de referencia, y el punto cero, me-diante la posición normal del anillo de medición.
Estructura del transmisor de anillos de cortocircuitosemidiferencial para bombas rotativas de inyecciónDiesel.
Relación de tensión en función del reconido deregulación,
demedición lineal(aprox.30 mm)
<----::_____-J>
Recorrido deregulación.r +
Figura 1
1 Núc eo de hierro
du ce
2 Bob na de referencia
3 Anillo de cortocircuito
de referencia
4 Var la de regulacrón
5 Bob na de nred ción
6 Anlllo de cortocircuiio
de medlc ón
.r Recorr do de la var la
de regulación
Figura 2
1 Bobina de medicion
2 An llo de cortocrrcu to
de medicrón
3 Núcleo de hierro
dulce
Arbo de la corredera
de regulac ón
Bobina de referenc a
An llo de cortocircu to
de referencia
Campo del ángulo de
regulación de árbol
de la corredera
Ánguio de medic ón
60'
.i,i
5
6
Figura 3
t.'¡ Tensión de salida
{ p,,¡ Tensión de referencra
lI
l
bE¡-
La+O
:
óo
f
(-l

:,rn se
i-rlll el-)
l::.ne
i.:!rn
::- a la
Sensor de nivel de combustible
Aclicación
-, ::rea de este sensor es detectar el nivel actual de
.,.:do del depósito de combustible y transmitir
--. señal correspondiente a la unidad de control
.i instrumento indicador en el cuadro de ins--:
-:rentos del vehículo. Junto con la electrobomba
-: : -rmbustible, el filtro de combustible, etc.,
:: .: iinsor constituye una parte integrante de las
- -.:¡des que están montadas en los depósitos de
--,,.:na o gasóleo y aseguran la alimentación fia-
: . ::l motor con combustible (figura l).
3s:ructura: ,.:sor de nivel (figura 2) consta de un poten-
. :-.itro encapsulado estanco al combustible y co--:---:do en forma de resistencia variable, un brazo
- .. .ursor (resorte cursor), conductores impresos
: ::,rcto doble), una placa portarresistencias y
- :..r;iones eléctricas. La palanca en cuyo extremo,: ::,uentra el flotador (orientable o fijo, en fun-
: , de 1a aplicación) de nitrófilo resistente al
- :.¡ustible, está fijada en el eje giratorio (pivote)
-:. :trtcflcióffietro y, por tanto, también en el re-
, :.: .ursor. El diseño de la placa portarresisten-
- ., ', la forma del flotador y de su palanca están
- -.:iados a la conformación respectiva del depó-
. ie combustible.
:lncionamiento
-- ','¡riar el nivel de combustible, el brazo detectol
.rente unido a través del pivote con la palanca
-.. --otador, se desliza con sus cursores especiales
:::r¿.hes chapeados para contactos) a lo largo de
., :istas resistivas del potenciómetro doble. En-
:-;es transforma el ánguio de giro del flotador en
--: relación de tensiones proporcional al ángulo.
- :..rs topes de fin de caÍrera limitan el margen an-
:-.:r de l00o para los niveles mínimo y máximo e
.:::iden simultáneamente la producción de tra-
-_ -: !eOS,
,a tensión de funcionamiento es de 5...13 V.
Sensores de posición S:-::' :=
Sensor de nivel de combustible (esfuctura)
eIa-
Je
::,. nte-
:-;ión.
f)
:3fo
Figura 1
1 Depos to de
combusl b e
2 Electroborca c:combust b e
3 Sensor ie " ,:4 Floiacor
Figura 2
1 Conexioneseléctricas
2 Resorte cursor
3 Remache chapeado
para contacto
4 Placa porta-
rresistenc as
5 Prvote
6 Contacto doble
7 Palanca de flotador
:l4.1,
8
IFLotador
Fondo del depósito
de combustible
Sensor de nivel de combustible en el depósito.

Sensores Sensores de pedal acelerador
Sensores de pedal acelerador
AplicaciónEl deseo de aceleración, de marcha constante o dereducir la velocidad lo manifiesta el conductor enun motor de mando convencional accionando conel pedal acelerador ia válvula de mariposa del mo-tor de gasolina o la bomba de inyección delmotorDiesel, mecánicamente a través de un cable o unvarillaje.
Cuando el motor está equipado con un sistemade mando electrónico, un sensor de pedal acelera-dor (también llamado transmisor de posición delpedal) reahza la función de la unión mecánica. Eldetecta el recorrido o la posición angular del pedaly lo transmite eléctricamente a la unidad de con-trol del motor.
Línea característica de un sensor de pedal aceleradorcon potenciómetro redundanle.
4,75
Recorrido del pedal ------+ aprox. 25 mm
Formas construclivas del sensor de pedal acelerador.
a
l::::::xl5cm
Como alternativa al sensor individual (figura2a)existen también módulos de acelerador (b, c)como unidades listas para el montaje, compuestasde pedal y sensor. Estos módulos no requieren tra-bajos de ajuste en el vehículo.
Estructura y funcionamiento
Sensor poteucionlétrico cle pedaI aceleraclor
Su componente principal es un potenciómetro en
el que se ajusta una tensión en función de la posi-ción del acelerador. Con ayuda de una curva ca-
racterística de sensor almacenada, la unidad de
control convierte esta tensión en el recorrido rela-tivo o posición angular del acelerador.
Para fines de diagnosis y para elcaso de un funcio-namiento irregular hay integrado un sensor re-dundante (doble). Éste es parte integrante del sis-
tema de control. Una versión del sensor trabajacon un segundo potenciómetro que en todos lospuntos de servicio suministra siempre la mitad de
la tensión del primer potenciómetro, a fin de reci-bir dos señales independientes para la identifica-ción de defectos (figura 1). Otra versión trabaja,en lugar del segundo potenciómetro, con un inte-rruptor de ralentí que señala a la unidad de con-trol la posición de ralentí del pedal acelerador.Para vehículos con cambio automático, un inte-rruptor adicional puede generar una señal eléc-
trica de sobregás.
]
I
J
it
rl
til
llt
üt
iü
,tü
I
1l¡
iftil
I
(sp(6@ocg:9qcoF
0,75
,1ilüFigura 1
I Potenctomctro l
(potenc ometro piloto)
2 Potenciometro 2
(med a tens on)
Figura 2
a Sensor de pedai
acelerador rndiv dua
b Módulo de pedai
ace erador suspendido
c lVodulo de pedal
ace erador enh esto
FIVPl
I bensor
2 Pedal especifico a
vehiculo
3 Soporte de peda
L'J)a\NaI
:
sNt\oulriir

Itr lnetro en
rla posi-
r\a ca-
ad de
ido rela-
m tuncio-
or re-
e del sis-
rabaja
dos los
mitad de
r de reci-
ntihca-rabaja,
un inte-
de con-
ador.
n i¡rte-
ú elec-
ura 2a)
LC,
Ipuestas
reren tra-
-1
I
-3
I
Sensores Sersc'es !s ceca ace erador
Sensor de ángulo Hall ARSl (vista).: -: riS de ángulo Hall: :<:sor de ángulo Hall del tipo ARSI (Angle of' ,:::ion Sensor) está derivado del principio bá-- : - -imán móvil'i Tiene un alcance de medición
; irrr-x. 90" (figuras 3 y 4).:' -luio magnético de un rotor (figura 4, pos. 1),
- -':::uido por un disco semicircular de magne-
...:- - rermanente, es reconducido al rotor a través
:: -:.:zapafapolar (2), dos conductores de flujo,' :' :l eje de poca energía magnética (6). Según la
:',:--:on angular (q), el flujo es conducido en ma-
.: -, menor medida a través de los dos conductos
:. -:io en cuyo circuito magnético se encuentra
:*e-:-:ien un sensor Hall (5). Así se consigue una
: - -.::erística considerablemente lineal en el
:-:-:o de medición,
: s:sor del tipo ARS2 posee una disposición
--:.:,lhcada sin conductores de flujo magnética-
:::-:e suaves, en la cual el imán es movido sobre
-:- ::;o circular en torno al sensor Hall. Como el
----.r de la característica sinusoidal resultante pre-
r.-:: una buena linealidad tan sólo en una sección-:-.::r'amente corta, se coloca el sensor Hall un
:,..:.¡ tuera del centro del círculo. De este modo; :::acterística se aparta de su forma sinusoidal
:::senta una sección lineal más larga, de más
:. - i,,l'.
:.:: sensor se puede integrar mecánicamente sin
:-;¡ltad en un módulo de pedal acelerador
:¡.:ra 5).
Sensor de ángulo Hall ARS2.
o@rou:3
@
Figura 3
1 Tapa del cuerpo
2 Disco de rotor
(de magnetismo
permanente)
3 Sistema electrónico
evaluador con sensor
Hall
4 Parte inferior del
cuerp0
5 Muelle de retroceso
6 Elemento articulado
(p,ej. rueda dentada)
Figura 4
1 Disco de rotor
(de magnetismo
permanente)
2 Zapalapolar
3 Conduclor de flujo
4 Entrehiero
5 Sensor Hall
6 Eje (magnélico suave)
r¡ Ángulo de giro
Figura 5
a Montqe en el módulo
del pedal acelerador
b Componenles
1 Sensor Hall
2 Eje del pedal
3 lmán
Sensor de ángulo Hall ARSl (estructura con posicionesangulares a ... d).
@woNNoUl
@
:
I
ffi
,T'
a
0:N:N'otu:<i3.m,
Nro,U
-(o

q;1
II
Figura 1
1 Tapa con nLreve
intanes permanentes
equ distantes
2 D sco de codificac ón
(de mater ai
magnético du ce)
3 P aca de c rcuitos
mpresos con 9
interruptores Ha y
m croprocesador
4 Engranaje
5 Otras cinco barreras
Hal
6 Casqu 1lo de fijacion
para columna de
dirección
Sensores de posición Sensores de ángulo del voiante de drrección
Sensores de ángulo del volantede dirección
AplicaciónEl control electrónico de la estabilidad (ESP) tienepor función mantener el vehículo en la trayectoriaprescrita por el conductor mediante intervencio-nes apropiadas en los frenos. Para ello, una unidadde control compara el ángulo de giro ajustado al
volante y la presión de frenado deseada con el mo-vimiento de giro y la velocidad efectivos del vehí-culo, efectuando en caso necesario un frenado se-
lectivo de las ruedas. De este modo se consigue un"ángulo de deriva" (desviación de la trayectoria en
relación con el eje longitudinal del vehículo) pe-queño y se impide un derrape hasta los límites fi-jados por la física.
Para la detección del ángulo del volante sonapropiados en principio todos los tipos de sensores
angulares. Sin embargo, con objeto de garantizarlaseguridad se requieren versiones cuya plausibilidadse pueda comprobar fácilmente o que, mejor aún,posean una función de autocontrol. Se utilizan po-tenciómetros, detectores ópticos de código y siste-
mas magnéticos. En la mayoría de sensores utiiiza-dos es necesario sin embargo registrar y memorizarconstantemente la posición actual del volante, ya
que los sensores angulares usuales pueden medircomo máximo 360o, mientras que un volante de tu-rismo puede describir en cambio un ángulo de+720o (cuatro vueltas en total).
Estructura y funcionamientoExisten dos sensores angulares magnéticos de me-dición absoluta adaptados a unidades de controlBosch, que (al contrario de los sensores de medi-ción incremental) pueden detectar en todo mo-mento el ángulo de giro del volante en todo el
campo angular que alcanza éste.
Sensor Hall clc iíngulo de giro clel r,olante L\\/S1
El sensor del tipo LWSI detecta mediante 14 "ba-rreras Hall" la posición angular y el número de
vueltas del volante. El funcionamiento de una ba-rrera Hall es semejante al de una barrera de luz: unelemento Hall mide el campo generado por unimán vecino, campo que puede ser fuertementedebilitado o tapado por un disco metálico de codi-ficación. La utilización de nueve circuitos integra-
dos Hall permite obtener una información digitalsobre el ángulo del volante. Los otros cinco senso-
res Hall restantes registran el número de lueltas,que es transmitido por medio de un engranaje en
relación 4:1 dentro del campo unívoco de 360".
La representación en despiece del sensor de án-
gulo delvolante LWS1 (figura 1) muestra arribalos nueve imanes que son tapados, cada uno porseparado según la posición del volante, por el
disco magnético dulce de codificación dispuesto
debajo. Sobre la placa de circuitos impresos que
sigue inmediatamente al disco de codificación se
encuentran interruptores Hall (C.1.) y un micro-procesador en el que se desarrolian pruebas de
plausibilidad y se descodifica la informaciónangula¡ siendo preparadapara el bus CAN.En la parte inferior siguen el engranaje reductory las otras cinco barreras Hall.
El gran número de elementos sensores, así como
la equidistancia necesaria en la disposición de ios
imanes que han de estar alineados con los circuitos
Representación en despiece del sensor de ángulo delvolante Hall LWS1,
{
r
I
nl
o::O

-,.srados Hall, ha conducido a la sustitución
-:r:resiva del tipo LWS1 por el LWS3.
. - ,r' nrasnetorresistivo de iinqulo clcl volantc-:
-::¡ién el sensor de ángulo del volante LWS3-- .:-ona con sensores AMR (Anisotrop Magneto
: :,,:tive), cuya resistencia eléctrica varía en fun-. .. lel sentido de un campo magnético externo.
-, .-irmación angular sobre un campo de cuatro
-..::s completas del volante resulta de la medi-
. ., je las posiciones angulares de dos ruedas
-: .:das que acciona una corona dentada fijada
, - :. :rbol de la dirección. Las dos ruedas dentadas
: - -rencian por tener una de ellas un diente de
- - ¡ ..'r que permite asignar a cada posición posi-- : -:, r'olante un par de valores de ángulo unívo-
-- :rt€ definido.
- :- ¡lsoritmo matemático (operación de cál-
- --Je se desarrolla según un esquema determi-' - - . calificado como principio de vernier modi-
' . -: . permite a un microprocesador calcular el-:-.-, del volante, pudiéndose corregir incluso*
- :-:isiones de medición de los dos sensores
" -- \dicionalmente existe Ia posibilidad de un
- -- : rtrol, de manera que a través de la salida- . :e puede transmitir un valor de medición
* - :-.rusible a la unidad de control.
-. :-qura 2 muestra la estructura esquemática
-: -:r.:or de ángulo del volante LWS3. Se pueden
- - .lir las dos ruedas dentadas, en las que hay-' " :, integrados. Encima están dispuestos los
: - r:S v la electrónica de evaluación.:
-- -.res económicas obligan también en esta
: - r f, estudiar nuevas alternativas de detección.
, : :::ina actualmente si un solo sensor de án-
'\ÍR (LWS4), que sólo puede efectuar por: .'
-r'rd medición precisa de 360o, montado en
: r:lo del árbol de la dirección, es suficiente-
- - - :=:¿ntizar la seguridad necesaria para el sis-
, - - ::P ttigura 4).
Sensor magnetonesistivo AMR LWS3 (principio)
Sensor magnetonesistivo AMR LWSS (aspecto)
Sensor magnelonesistivo AMR LWS4 para el montaje
extremo del árbol de la dirección.
Figura 2
1 Arbo de d recc o¡
2 Ce r as de n¡ed cron
AV] R
3 Rreda d..ntada de m
d e¡tes
4 E cctron ca de
eva uacion
5 lmanes
6 Corona dcntada dc
n)r¡dentes7 Rucda dcntada dc
m +1 d enles
Figura 4
I Columna de d reccion
2 Engranale de la
d rección
3 Sensor de angulo de
la d rección
4 Bara cremal era
oI:
!. :sr como
:-.,:l de los,-. circuitos
,:-: :el
-¿
-3
-4
-5
L:
en el
\\4
!
=
o
:,c
-6

Sensores de posición Sensores de eje
Sensores de eje
AplicaciónCon aluda de la regulación automática del alcance
de las luces se corrige el enfoque de los faros del ve-
hículo. Estando conectada la luz de cruce se regulala inclinación del automóvil, de manera que se
pueda disponer de una visibilidad suficiente al vo-lante sin peligro de deslumbrar a los conductoresque circulan en sentido contrario. El sistema de re-
gulación estático corrige la inclinación del vehículoocasionada porlacargadel vehículo. El sistema de
regulación dinámico corrige adicionalmente los
movimientos de cabeceo del vehículo ocasionadospor las aceleraciones y los frenados (dinámica de
marcha). Los sensores de eje detectan muy exacta-mente el ángulo de inclinación de la carrocería.
Estructur¡ y fr-rncionamiento
La medición de la inclinación del vehículo se efec-
túa por medio de sensores de eje (sensores de án-gulo de giro), montados en las partes delantera ytrasera de la carroceria. Mediante una palanca gi-ratoria unida a través de una biela con el respec-
tivo eje del vehículo o suspensión de rueda, se
mide la compresión de los elementos de suspen-
sión que se produce. La inclinación del vehículo se
calcula luego partiendo de la diferencia de tensiónentre los sensores de los ejes delantero y trasero.
El funcionamiento de los sensores de eje se basa
en el principio del efecto Hall. En el estator (figura
1, pos. 5) hay integrado un C.l. Hall, que se en-
cuentra dentro de un campo magnético homogé-
Sensor de eje (sección).
neo. El campo magnético produce en el C.l. una
tensión Hall que es proporcional a este campo. Algirarse los imanes anulares (6) con el árbol (2) se
produce una variación del campo magnético que
atraviesa el C.l. Hall.
En función de la compresión de los elementos
de suspensión por la carga y/o las aceleraciones, la
biela (figura 2, pos. 4) transmite el vaior corres-
pondiente a la palanca giratoria del sensor de eje,
que lo convierte en una señal de tensión eléctrica
proporcional al ángulo de giro.
La unidad de control detecta las señales de los
sensores de eje, evalúa la diferencia entre el eje de-
lantero y el eje trasero y calcula el valor teóricopara la posición de los servomotores, teniendo en
cuenta la velocidad de marcha. En marcha cons-
tante, la regulación dinámica del alcance de las lu-ces permanece en el modo de gran amortiguación.Los motores paso a paso son adaptados sólo lenta-
mente a la inclinación del vehículo, para evitar que
ondulaciones o baches de la calzada ocasionen co-
rrecciones constantes del alcance de los faros. En
las aceleraciones o frenados se conecta inmediata-mente el modo dinámico. En pocas milésimas de
segundo asegura la adaptación del alcance de las
luces. A continuación el sistema conecta de nuevo
automáticamente al modo de amortiguación lenta.
I
,ull
'tt
ilt[
J{
JN
tu
,iilü
Lff
¡ü
ll
ü
¡ü
¡ü
lflll
,u
,ül&
,üü
ql
ünlr
¡0
d
]lU
Figura 1
1 Pa anca g rator a
2 Árbol
3 Caja
4 Alojamiento de os
manes anulares
5 Estator con C.l. Ha I
6 lmán anular
Figura 2
1 Fijacrón en ia
canocería
2 Sensor de ele con
conexrón por enchufe
3 Palanca grratorra
4 Btela
5 E e de vehicu o
ISensor de eje (montaje en el vehiculo).

-.-. una
.:po. Al'.. l)se
' -1,¡r qu€
i:tintosi:-rrileS, la
: -r:res-
-: Je eje,
. -.ctrica
., de los
, .' eie de-
:...iico'.::ndo en
:-: ;OllS-
' ie las lu-:::uación.
' -.io lenta-
i ;i'itar que
-i-,_ri.Ien co-
:.:.1S. En
:,::ediata-:-r-:ll.1S de
:-. de las
' i; nuevo
: --.l.rn lenta.
Sensores ultrasónicos
:: cación
- : ::i'rSores ultrasónicos se utilizan para averiguar
. -..:.rncias a que se encuentran posibles obstá-
., ) i'para vigilar un espacio; están integrados
:' ¡ parachoques de vehículos p. ej. para facilitar. : -,r.rda y salida de aparcaderos y las maniobras
- : :::.:cionamiento. El gran ángulo de abertura
. -. ,: obtiene con el empleo de varios sensores
- . . -,r parte trasera y de 4 a 6 en Ia parte delan-
: -- :ermite determinar con ayuda de la "triangu-
. - -'la distancia y el ángulo en relación con un' . .:ulo. El alcance de detección de un sistema
.: .. ;lase cubre una distancia de aprox.0,25 a
:..
. - . .iI.l- ::rSor se compone de una caja de plástico con-: ,-:t.rll por enchufe integrada, un convertidor
-, -.::.rsonidos (membrana de aluminio en cuyo
" - ,:terior haypegada una pastilla piezocerá-." -: ,,' una placa de circuitos impresos con elec-- - :: de emisión y evaluación (figura 1). Dos
-: :: -rcs líneas eléctricas de conexión a la unidad
-: - :irol sirven para la alimentación de tensión.: - . :ercera línea, bidireccional, se conecta la', - - :r emisora y se transmite la señal de recep-
- =','¿luada de vuelta a la unidad de control
. : rion de colector abierto de alto potencial
- : -:l.lSO ).
Sensores de pos c c.
Funcionarriento
El sensor ultrasónico funciona según el princrpio"impulso-eco" en combinación con la triangula-
ción, Cuando recibe de la unidad de control un
impulso digital de emisión, el circuito electrónico
excita la membrana de aluminio mediante impul-sos rectangulares dentro de la frecuencia de reso-
nancia para generar vibraciones típicas de aprox.
300 ¡rs, emitiéndose entonces ondas ultrasónicas:
la onda sonora reflejada por el obstáculo hace vi-brar a su vez la membrana, que entretanto se había
estabilizado (durante el período de extinción de
aprox. 900 ls no es posible ninguna recepción). La
piezocerámica convierte estas vibraciones en una
señal eléctrica analógica, que la electrónica del
sensor amplifica y transforma en una senal digital(figura 2). El sensor tiene prioridad frente a la uni-dad de control ¡ al detectar una señal de eco, con-muta la conexión de la señal a "bajo potencial"(<0,5 V). Si se encuentra una señal de eco en la lí-nea, no se puede procesar la señal de emisión.Cuando la tensión se vuelve inferior al umbral de
conmutación de 1,5 V en la línea de señales, la uni-dad de control incita al sensor a que realice la emi-sión.
A fin de poder cubrir una zona lo más extensa
posible, el ángulo de detección es grande en el
plano horizontal. En el plano vertical, por el con-trario, es necesario que el ángulo sea pequeño,
para evitar reflexiones perturbadoras procedentes
del suelo.
S='sor ultrasónico (sección). Esquema de conlunto del sensor ultrasónico.
))))
((tt?,:i
iña
l-.-; [;;lF[9t+,.Tu'.[ffi:,H
--r-
Figura I
1 P aca de circu tos
impresos
2 Masa de relleno
3 Cala de plástico
4 Soporte de sistema
5 Anillo de
desacoplam ento
(caucho sil cónico)
6 lVlanguito
7 Convert dor de
u trasonidos
I Caperuza
9 Conexión eléctr ca
(enchufe)
4

sensores de posición Radar regurador de ra distancia enfe vehicuros
éUn sensor más?Claro que este radar regulador (figura .l)es
un sensor,pues el mide la disiancia, la velocidad relativa y la po_sición lateral de los vehículos que marchan deiante.Para ello el radar (Radiation Detecting and Ranging)emite paquetes de ondas milimétricas. para su emlpleo en la circulación por las principales marcas deautomóviles se ha autorizado la banda de frecuenciasde 76...77 GHz (longitud de onda =4 mm). Los pa_quetes de ondas emitidos son reflejados por las su_perficies de metalo material de alta dielectricidad yson detectados de nuevo por el módulo receptor delradar. La duración y/o frecuencia de las señales reci_bidas es comparada con la de las señales emitidas. Afin de que la comparación pueda ser utilizada para lasinterpretaciones deseadas, el paquete de ondas queha de ser emitido es conformado en función del trans_curso frecuencia-tiempo (modulación). Los modosmás conocidos son la modulación de impulsos, en laque se forman impulsos de una dimensión de 10...30ns (lo que corresponde a una longitud de 3...10 m), yla modulación de frecuencia, que en el momento de laemisión varía la frecuencia (momentánea) de las on_das en función del tiempo.
La señal recibida ha de ser demodulada para quepueda suministrar la información deseada. Si setrata de una señal de modulación de impulsos, semide el tiempo transcunido r entre la emisión y la re_
cepción. La distancia d puede ser determinada apartir de esta diferencia de tiempo y en relación conla velocidad de la luz c (- 300000 km/s):
d=t.cl2
El divisor 2 tiene en cuenta el recorrido de ida yvuelta de la señal (ejemplo: r =
.l ls corresponde a
una distancia de r/ = 1b0 m).
Si se trata de la modulación de frecuencia, la va_riación de la fecuencia tiene lugar durante la emi_sión. En caso de variación lineal, la señal de impactoretardada en función del tiempo de reconido pre_
senta, en comparación con la señal actual emitida,una diferencia de frecuencia que es proporcional ala distancia (para 100 MHz/rns y una distancia 11=150 m, la di{erencia de frecuencia obtenida es de100 kHz). Si bien h velocidad relativa del objero demedición se puede determinar a partir de medicio_nes sucesivas de la distancia, este parámetro sepuede medir con una fiabilidad y precisión conside_rablemente mayores utilizando el efecto Doppler.
En caso de un acercamiento aumenta la frecuenciade las ondas recibidas en Sl0 Hz por m/s de veloci_dad relativa (a 76 GHz).
La posición lateral del objeto del radar constituyela tercera dimensión de base buscada. Esta sólopuede ser determinada si el haz del radar es dirigidoen diferentes direcciones; partiendo de la intensidadde la señal, se determina la dirección que ofrece lareflexión más fuerte. Para ello es necesario un rápidobanido ("scanear") mediante un haz o una configura-ción multihaz con varias antenas.
óNingún sensor más?Claro que este radar regulador de la distancia esmucho más que sólo un sensor. pues además de de_terminar la distancia, la velocidad relativa y la posi_ción lateral de vehículos que marchan delante, esteaparato que los ingenieros constructores de Boschllaman SCU (Sensor & Conkol Unit), o sea, unidadsensible y de control), realiza un procesamiento sub_siguiente muy complejo que lermina con instruccio_nes de regulación para el motor y los frenos (figura2), Las funciones de este aparato exceden a unasimple regulación de la distancia y se extienden auna regulación inteligente de la velocidad de marchaACC (Adaptive Cruise Control).
Radar regulador de la distancia entre vehículos.
ooóI
f
Gl)
L-

Sensores de posición Radar reguhdor de h dstanc€ erye ven,oJ€s
Una de las funciones de base es en primer lugar la
regulación convencional de la velocidad de marcha,
con la que se mantiene constante, una vez ajustada,
la velocidad de marcha deseada. Esta función per-
manece act¡va mientras no se detecte ningún vehí-
culo precedente cuya velocidad sea inferior a la ve-
locidad deseada ajustada por el conductor. Pero
cuando en la zona de detección del radar (aprox.
100 a 150 m) se descubre un vehículo que impide
roseguir la marcha con la velocidad deseada, ésta
se adapta entonces a la velocidad del vehículo que
precede, Si las diferencias de velocidad son ligeras,
ello se puede realizar simplemente reduciendo la ad-
misión de gas; si las diferencias son de mayor impor-
tancia, se hace necesaria una intervención en los
frenos.
Una vez se ha compensado la velocidad, el
vehículo equipado con ACC sigue al vehículo
precedente con un intervalo de tiempo ampliamente
constante, es decir, con una distancia que aumenta
si aumenta también la velocidad.
La dificultad técnica mayor para el procesamiento de
las señales dentro de la ACC-SCU la depara la
elección del vehículo objetivo "correcto". Se trata en
primer lugar de reconocer, entre las muchas reflexio-
nes del radar, aquéllas que proceden de los vehícu-
los precedentes ya detectados, Luego hay que apre-
ciar si esos vehículos marchan realmente en el
mismo carril (lo que particularmente antes de las
curvas y durante ellas no es fácil de evaluar, si bien
los sensores del sistema de control electrónico de la
estabilidad ESP para la regulación de la dinámica de
marcha suministran importantes magnitudes compa-
rativas).
El lector se puede formar ahora él mismo un juicio
sobre si debe considerar la ACC-SCU como un
sensor con unidad de control o como una unidad de
control con sensor integrado. En todo caso existirán
en el futuro nuevos sistemas de sensores para abar-
car el entorno del vehículo que, como p. ej. los "sen-
sores vídeo", realizarán varias funciones partiendo
de un solo aparato.
" R.g'r19iól ill.grjgrl9 99 rgy9l99l9i9 d9 T1'9F
("9"'".9: *lj*tg|
I
I>lP¡o'olL¡<¡
el
L(t
Ouó@
Figura 2
1 Oscilador
2 Modulador
3 Conmutador electró-
4
5
6
7
Ig
10
11
12
13
14
15
16
17
18
19
20
nico de emisión/
recepción
Antena
Demodulador
Amplificación
Control del radar
Síntesis de Fourier
Detección
Adaptación
Exploración
Vigilancia del radar
Selección del blanco
Detección en curvas
Regulación de la
distancia
Regulación de la
velocidad
Priorización
lnstrucciones de
mando para el grupo
motopropulsor
Vigilancia del sistema
lnstrucciones de
mando para los frenos
Visualización del
funcionamiento ACC
lndicación de la
velocidad y del
intervalo de tiempo
deseados
lnterruptor de mando
Lógica de vigilancia
Control de pares
Coeficiente de giro
sobre el eje vertical
Ángulo del volante
Velocidades de giro
de las ruedas
lntervención en los
frenos regulada
electrónicamente
23
24
26
27
28

sensores de velocidad de rotación/velocidad lineal
Sensores de velocidad de rotación/velocidad lineal Magn tudes/principios de medición
Magnitudes de medición
Los sensores de velocidad de rotación y de veloci-dad lineal miden el ángulo descrito o el trecho re-corrido por unidad de tiempo. En ambos casos deaplicación en el automóvil se trata generalmentede magnitudes de medición relativas que aparecenentre dos piezas o también en relación con la cal-zada u otro vehículo. En algunos casos, sin em-bargo, hay que medir también la velocidad de ro-tación absoluta en el espacio o alrededor de losejes del vehículo, parámetro designado a menudo"velocidad de convolución'i Así, p. ej., para la regu-lación de la dinámica de marcha hay que detectarla velocidad de giro del vehículo alrededor de sueje vertical.
Para la detección de la velocidad de rotación re-lativa se hace una distinción, según el número y eltamaño de las marcas periféricas exploradas de unrotor, entre los siguientes sensores (figura l):
o Sensor incremental de paso estrecho, que per-mite detectar también hasta cierto grado lavelocidad instantánea periférica y/o una subdi-visión angular muy fina,
. senslr segmentado, que distingue un pequeñonúmero de segmentos periféricos (p. ej. elnúmero de cilindros delmotor)y
o sensor de velocidad de rotaciónsencillo, que conla ayuda de una sola marca detecta únicamentela velocidad de rotación media por luelta.
Son ejemplos de velocidad de rotación relativa Ia
¡ velocidad de rotación del cigüeñal ydel árbol de levas,
r velocidad de giro de las ruedas(para ABS/ASR/ESP) y
r velocidad de rotación de la bombade inyección diesel.
La medición se efectúa generalmente con la ayudade un sistema detector incremental, compuesto de
rueda dentada y sensor tacométrico.
Son además nuevas aplicaciones:
¡ medición de velocidades de rotación por mediode sensores tacométricos integrados en los coji-netes (cojinetes de rueda, módulo de retén de
aceite en el cigüeñal),r velocidad en relación con el suelo,
o velocidad de giro del vehículo alrededor de su
eje longitudinal (alzable) y del eje de cabeceo(protección contra el vuelco).
Principios de medición
Los sensores tacométricos convencionales se basan
en efectos de medición grandes (p. ej. inducción).Por eso son en la mayoría de los casos eléctrica-mente "pasivos'l es decir, no poseen generalmenteninguna electrónica integrada. Los sensores másrecientes se basan en efectos de medición muy pe-queños (p, ej. Hall) y requieren por tanto una elec-
trónica integrada. Según la definición dada en Ia
introducción, forman parteya de los sensores "in-teligentes" (llamados a menudo también sensores"activos"). Los detectores de velocidades de rota-ción absolutas (velocidad de convolución) requie-ren incluso una electrónica muy compleja directa-mente en el sensor, pues los efectos de mediciónaquí utilizados no sólo son muy pequeños, sinoque necesitan también una compleja regeneración
de las señales.
Para la medición incremental de la velocidad derotación se pueden aprovechar efectos ftsicos muydiferentes (algunos también muy económicos). Sinembargo,los detectores ópticos y capacitivos p. ej.
son muy poco apropiados para las duras condicio-nes de funcionamiento en los automóviles. En la
*üo,ft
um
rüllu
m[M
1@
rtOa
Sülr
JUil
rm
,rux
$mir
üll0
,,E¡ti¡
ml
r[üU
'mf,l
ü[[
It{t
'mü
,tflu
müt
mfl
Mlü
üllle
¡üm
guB
Detecc¡ón de la velocidad de rotación relativa
H
Figura 1
a Sensor incremenial
b Sensor de segmentos
c Sensor tacométrico
ar.l)

.:ila la
, ¡rUda
-:sto de
-: rredio.os coji-
':.n de
:¡esui-.:ceo
t-lad de
:_1S muy
-,-trs i. Sin
'. p.ej.
:dicio-,. !n la
- ::;tica se prefieren exclusivamente los sensores
-: ;lecto magnético.
:crmas actuales de los sensores
- : Serlsor€s utilizados se distinguen por las dife-':..:3s fbrmas siguientes (figura 2):
r -r tbrma de barra,
r .r tbrma de horquilla o de barrera y
r .r tbrma de anillo (interior o exterior).
- .:nsor en forma de barra, que se aproxima
- :t) ürl dedo al rotor para explorarlo, es el más', --- de montar y el preferido. El sensor en forma
-: -orquilla o de barrera, cuyo montaje requiere
, :.irto centrado respecto al rotor, se acepta y
- --u ¿ también en parte. La forma que envuelve
. r-..r un anillo el eje del rotor, ha sido práctica-
-:..:e abandonada. Solamente un anillo interior- . -'ducido en el extremo hueco del árbol, de es-
r -.:ura incremental, se sigue utilizando todavía
: - .:s puntas del árbol.
I : :esgracia la forma de barra utilizada con más
::: *¿ncia es la que ofrece la menor sensibilidad
-: ,:edición, creando problemas en caso de ser de-
-.,.:do grande el entrehierro. Por el contrario, la. :::a de horquilla es ampiiamente insensible al
-:.,r arial y al radial. Las formas de anillo, que son
-: :¿s complejas en su realización, generan una
'.... de medición muy intensa y presentan una
-:.- insensibilidad a las tolerancias geométricas.
:crmas de sensores,
Sensoresdevelocidadderotación/velocidad lineel :--: : :: :: -::
Nuevas formas de sensoresLos sensores inductivos convencionales son poco
satisfactorios en muchos aspectos. Como sea que
la amplitud de su señal depende de la veiocidad de
rotación, no son apropiados para la medición de
velocidades de rotación muy bajas. Comparados
con otros sensores sólo permiten una pequeña to-lerancia de entrehierro y en general no son capaces
de diferenciar las variaciones del entrehierro (vi-
braciones) de los impulsos tacométricos. Por lo
menos la punta del sensor debería poder resistir
altas temperaturas, por razón de su proximidad a
componentes calientes (p. ej. frenos). En conse-
cuencia, los nuevos sensores deben presentar las
propiedades adicionales siguientes:
o Detección estática (es decir, velocidad cero o
velocidades muy bajas de arranque o de giro
de las ruedas),
o entrehierros mayores (montaje no ajustado al
entrehierro > 0),
. tamaño reducido,
r insensibilidad a variaciones del entrehierro,
o resistencia a las temperaturas(s 200 "C),o identificación del sentido de rotación
(opcional paralanavegación) e
o identificación de marcas de referencia
(encendido).
Para el cumplimiento de la primera condición son
extraordinariamente apropiados p. ej. Ios sensores
magnetostáticos ( Hall, magnetorresistencia,
AMR). Ellos permiten en general cumplir también
con las condiciones segunda y tercera.
La figura 3 (en la página siguiente) muestra tres
formas apropiadas de sensores de barra que son
ampliamente insensibles a las fluctuaciones del en-
trehierro. Aquí se hace una distinción entre los
sensores que detectan en sentido radial y aquellos
otros que están orientados en sentido tangencial.
Las sondas magnetostáticas pueden distinguirsiempre, independientemente del entrehierro, los
polos norte y sur de una rueda polar magnética-
mente activa.
En el caso de rotores magnéticamente pasivos,
e1 signo de la señal de salida no es independiente
del entrehierro cuando detectan el campo magné-
tico tangencial (aquí es a menudo un inconve-
'#.
g'-É
o
a
Figura 2
a Forma de horqu lla
(prnc p o de rotor de
panta 1as o de barrera)
b Forma de bara
(princip o de
acercamiento)
,L Fntrehleno

Sensores de velocidad de rotación/velocidad lineal princ pios de medición
Sensores insensibles a variaciones del entrehieno
niente el aumento del entrehierro causado porel sensor mismo).
Se utilizan también a menudo sondas de campodiferencial o de gradiente que miden de modoradial. Ellas detectan fundamentalmente sólo elgradiente del componente radial del campo, cuyosigno no varía con el entrehierro, sino sólo con elángulo de rotación (figura 3).
RotoresEl rotor es de una importancia decisiva para la me-dición de velocidades de rotación. Generalmentelo pone a disposición el fabricante del automóvil,mientras que el detector propiamente dicho pro-cede del proveedor. Hasta ahora eran usuales casiexclusivament e rltlres magnéticamente pasivos, fa-bricados de materialmagnético dulce (en la mayo-ría de los casos hierro). Ellos son más económicosque las ruedas polares de material magnético degran remanencia. Además son más f,iciles de ma-nejar, puesto que no están magnetizados y noexiste el peligro de una desmagnetización (recí-proca) durante su permanencia en almacén. pero
precisamente en combinación con sensores debarra constituyen el tipo de rotor más difícil deexplorar.
El magnetismo propio de\as ruedas polares (rotores
magnéticamente activos) permite en general un en-trehierro claramente mayor para un ancho de in-cremento igual y una misma señal de salida,
Los rltlres pa.slyos se hallan sobre todo en formade ruedas dentadas, existentes ya en el automóvil(corona dentada de arranque) o que se montanespecialmente para la generación de señales (ABS).
En el último caso se utilizan a veces también den-tados planares y formas que facilitan una detec-ción axial.
Para la detección de la velocidad de rotación yde la posición angular del cigüeñal (p. ej. en la co-rona dentada de arranque) ha de existir una"marca de referencia" detectable en cada revolu-ción. Esta marca de referencia ha de asegurar unasincronización fiable y óptima del encendido y lainyección, particularmente cuando no existe nin-guna detección paralela de la posición angular delárbol de levas. Puede servir de marca de referenciap. ej, la falta total o parcial de un diente. Este huecoentre dientes puede identificarse por su mayor du-ración temporal, puesto que se sabe que la veloci-dad de rotación del motor varía sólo paulatina-mente y no de golpe.
Además de ruedas dentadas se utilizan a veces
también discos perforados estampados o anillos dechapa ondulada (ABS), como rotores económicos.
Únicamente la introducción de sensores ABS inte-grados en los cojinetes de ruedas ha conducido alempleo de ruedas polar¿s, que en parte desempe-ñan simultáneamente la función de un anillo-retén elástico (partículas magnéticas unidas porplástico). También los "sensores tacométricos" de
forma compacta y encapsulada, que están unidosmediante un eje flexible corto con una de las rue-das del vehículo, contienen ruedas polares de re-ducido número de polos para generar una señal de
velocidad. Estas ruedas polares son detectadas ge-
neralmente por sensores Hall integrados.
¿5h-rJ
<-+-H
Figura 3
a Sonda de campo radial
y rueda polar
b Sonda tangenc al
c Sonda diferencial y
rueda dentada
{f;

'a: r()t)res
:.- Un en-
ie in-:.!:.
::¡rma- t:tó\'il:,:rtan
-.s \BS).::: den-
:i;iiln y: l.r co-
: : i-eces
:.:illos de
:--.rnticos.
:-3S inte-
::;ido al
:!:nlpe--:-'^--,U-
-:s por
::;.-lS" de
:- ;nidos.: -.15 IUe-
.i de re-
r: ieñal de
*:Jas ge-
','edición relativa de la velocidad: e rotac¡ón/velocidad lineal
Sensores inductivos: ¡ios finr.lamentales
- : lensores inductivos de bobina estaban ya dispo-- :,:s para la medición de velocidades de rotación
- -,:do no existía aún ninguna versión en absoluto
:ar-ía no adecuada en tecnología de microes-----,-:ura (p. ej. Hall). Ellos aprovechan la ley de la
- : -cción para medir la velocidad (de rotación),
::-:rando en su salida bipolar una tensión U4, Que
: . ::rrporcional a la variación en ei tiempo de un
' - , magnético iD (w número de espiras):
-=L'ind=w'dQldt
: -:io magnético @ es también una función de la
- ,..-ión angular x y del entrehierro r/¡:
:, = Q(x, d¡) y r/¡= const
: ¡iiene entonces:
- = L'ind = w' 0Ql6x' dxldt
':, :isentando dx/dr la velocidad (de rotación)
- -..dir.
:- , ecuación muestra también claramente el
. -::tr débil de los sensores inductivos: a saber, si el
- :.rtr del entrehierro d¡ no se puede mantener
, :i¿nte (p. ej. en caso de vibraciones o de juego
-'.--:nico), genera entonces una variación del flujo
: -;nción del tiempo, del mismo importe que la
.. .idad de medición. Este efecto puede ocasio-- -: -npulsos de tensión que no pueden ser distin-
- -, ttrs, o sólo difícilmente, de las verdaderas seña-
,, :e velocidad. Tales impulsos parásitos pueden
: r.:r urr? gran amplitud, pues el flujo varía con el
: :ihierro siguiendo una función exponencial y
, =nómenos
de oscilación (p. ej. vibraciones de
, .:enos) son a menudo de alta frecuencia.
,t.rS s€rlSor€s inductivos son siempre, por tanto,
:.=.:rrr€s dinámicos. En principio no son apropia-
- : rara detectar velocidades extremamente lentas
-,,: estáticas o estáticas), pues su señal de salida' .:le entonces a ser cero. Constituyen una excep-
- : sólo los sensores de bobina alimentados bajo
- ,. iiecuencia portadora según el principio de Ia
Sensores de velocidad de rotación/velocidad lineal
amortiguación magnética o de 1as corrientes de
Foucault, que apenas son utilizados empero en la
técnica del automóvil,
Los sensores inductivos de velocidad de rotación
constan en principio de tres componentes magné-
ticos esenciales (figura l):o bobina fija,
o piezade hierro dulce e
¡ imán permanente.
La variación de flujo necesaria para la generación
de la tensión de salida se obtiene por movimiento
o rotación de la pieza de material magnético dulce
o duro. Los sensores en los que el flujo magnético
permanente es reemplazado por una corriente
continua con la que es alimentada la bobina de in-ducción, fueron usuales sólo en otro tiempo para
el ajuste manual delencendido, siendo Ilamados
"sensores de PMS" (punto muerto superior).
Los sensores inductivos actuales están constitui-dos preferentemente por un imán de barra (figura
l, pos. l) con espiga polar de hierro dulce (2) que
soporta la bobina de inducción (3) de dos cone-
xiones. Cuando gira una corona dentada ferro-magnética (5) u otro rotor de estructura similarpor deiante de este detector, se induce en la bobina
una tensión proporcional (casi sinusoidal) a la va-
riación del flujo magnético en función del tiempo.
Para la detección de dentados muy finos, una parte
dei extremo delantero de la espiga polar es agu-
zada con objeto de obtener un "concentrador de
flujo'] es decir, forma una "lámina polar" que gene-
ralmente atraviesa la caja de metal o plástico y se
Sensor inductivo de velocidad de rotación.
Figura 1
1 lmán de bana
2 Esp ga polar de
nrater al magnético
du ce
3 Bobina de inducción
4 Entrehieno ¡11
5 Corona dentada
ferromagnetica (rotor o
corona generadora de
impu sos)
6 lVarca perifer ca o de
referencia
1 Espac o entre dientes

Sensores de velocidad de rotación/velocidad lineal lr.4ed ción relativa de velocidades
A un dentado uniforme corresponde (si el en-trehierro no es demasiado estrecho) un curso casi
sinusoidal de la tensión (figura 2b). La veiocidadde rotación resulta de la distancia entre los pasajes
por cero de esta tensión, cuya amplitud es igual-mente proporcional a la velocidad.
La amplitud de la señal depende en gran medida(función exponencial) del entrehierro y del ta-maño de los dientes. Como en el caso de todos losprocedimientos incrementales magnéticos, losdientes pueden ser detectados perfectamente hasta
anchos de entrehierro d¡delamitad o un tercio de
un espacio entre dientes rt:
dt' )'l(2...3)
Las coronas dentadas montadas en los cigüeñalesy las ruedas (ABS) están previstas para cubrir en-trehierros de hasta 0,8 o 1,5 mm. La marca de refe-rencia necesariaparael encendido se obtiene su-primiendo un diente o llenando un hueco entredientes. Se identifica por la mayor distancia de lospasajes por cero y genera (como si hubiera undiente más grande) una tensión de señal muchomás alta, que ejerce un influjo - en ciertas circuns-tancias inadmisible - sobre la tensión incrementalprecedente y/o sucesiva.
Apreciación
Ventaias
o Bajos costes de fabricación,
o alta estabilidad a perturbaciones: baja resisten-
cia interna estática (más elevada en modo diná-mico), ninguna electrónica local (pasividad
eléctrica) que haya de ser protegida,o ningún problema en caso de derivas de la
tensión continua (principio de medicióndinámico),
r amplio margen de temperaturas (depende
sobre todo de la masa de llenado).
adapta a la forma y sentido de la estructura incre-mental.
El rotor puede tener igualmente en su periferiauna o varias marcas (6), La figura 2 muestra elcurso del flujo, así como la tensión inducida parael caso de una sola marca periférica o de referencia(ranura, leva, espiga polar).
Parala detección electrónicade tal marca periféricase aprovecha habitualmente el pasaje muy pinopor cero en el centro del máximo de flujo. por ra-zón dela ley de la inducción, la amplitud de la se-
ñal es proporcional a la velocidad de rotación entodas las fases.
Para que la unidad de control pueda efectuaruna evaluación segura y fiable, la distancia entrelas puntas del impulso doble (o también de impul-sos de tensión periódicos ) Uss debería ser de 30mV como mínimo. La desventaja de los sensoresinductivos, sin embargo, reside en el hecho de quesu tensión de salida puede tener a grandes veloci-dades valores muy altos, superiores en mucho a
100 V, que son difíciles de procesar por vía electró-nica.
Si las altas puntas de tensión son recortadas conla aluda de diodos Zener, se producen muy prontoconsiderables errores angulares a causa de la varia-ción consecutiva de la impedancia de carga delsensor. Eso puede ser muy desfavorable por lomenos en el caso de los sensores angulares decigüeñal y de árbol de levas, que participan en laregulación del avance del encendido. para estas
aplicaciones se requiere una conformidad angularde aprox. 0,2o.
En el caso de ciertas marcas periféricas magnética-mente pasivas o activas,el preimpulso generadopor el campo reflejado, que no tiene importanciaalguna a bajas velocidades de rotación, puede al-carrzar a altas velocidades un orden de magnituden el que puede sobrepasar el umbral del descrimi-nador de valores límite posconectado, ocasio-nando entonces incluso un error mucho mavor(figura 2a). es por esta razón que los valores límitedel circuito de entrada de la unidad de control sonadaptados dinámicamente a la velocidad de rota-ción respectiva,

el en-yl casi
,.idad
pasajes
gual-
edida
lu-¡los los
,los
rte hasta
tercio de
renales
lrir en-
r de refe-
:ne su-
entre
i¿ de los
tunnucho
, ;i¡cuns-rmental
resrsten-
¡lo diná-
'-idad
ela
on
nde
i'..ntaJaS
-:mites de reducción del tamaño constructivo
;:r caso de tecnología de bobinaje convencional'
.;ñal de salida dependiente de la velocidad de
:.rtación, ninguna adecuación para movimien-
:-rs casi estáticos,
'.nsibilidad a variaciones del entrehierro.
Sensores de velocidad de rotación/velocidad lineal
Ejemplos de aplicacióno Sensor inductivo de la velocidad de rotación del
motor (sensor de revoluciones del cigüeñal),
. sensor inductivo de la velocidad de giro de rueda,
. sensor inductivo de la velocidad de rotación del
árbol de levas (encendido transistorizado de
detector inductivo TZ-I),o sensor de moümiento de aguja (inyección diesel).
Curso del flujo y de la tensión en un sensor inductivo para una sola marca magnética por vuelta, una estructura incremental
ceriódica (p.ej. rueda dentada, rueda polar) o un circuito de evaluación
Magnéticamente pasivo
Marcas individuales
rotación
Rueda dentada
Magnéticamente activo
Marcas individuales
t
t¿-
t¿5
t
t5
6oE-o-, L.=
ü 3,Ed !2roA EU)
- L.=
-OF
't ta
ict)
Ángulo derotación
(p ------>
Ángulo de E -----+rotación
Angulo de p ----->rotación
Figura 2
a l\4arca magnética única
por vuelta
b Estructuraincremental
periódrca (p,ej. rueda
dentada, rueda polar)
c Circuito de evaluación'1 Leva
2 Ranura
3 Umbrales de
conmutación
4 Evaluación del pasaje
muy pino por cero
5 Flanco de preparación
6 Flanco de conmutación
7 Punto de conmutación
8 Espigas polares
9 Sensor
;,/2 Desfasaje
Lo)óóuz@
1
2
I
I
I
s
N
t_I
I
I
8
Rueda polar

Sensores de velocidad de rotación/velocidad lineal Medición relativa de velocidades
Sensores magnetostáticos
Vista cle conjunt0
La detección casi estáticade la velocidad de rota-ción se puede realizar con preferencia mediantesensores magnetostáticos. Su señal de salida inde_pendiente de la velocidad de rotación y única-mente dependiente del campo magnético facilitay simplifica, incluso en el caso de velocidades ele-vadas, el tratamiento electrónico de tensiones deseñales de valores limitados. Ofrecen además unap o sib ilidad d e mini atur izaci ó n casi discrecional vla ventaja de tener integrados \a amplificación y eltratamiento de las señales en ellos mismos. Gracias a
su pequeño tamaño de construcción se pueden re_
alizar también fácilmente s i st e m a s múlt iple s talescomo p. ej. configuraciones diferenciales o sistemasde detección integrada del sentido de rotación.
Una desventaja importante de tales sensoresactivos radica sin embargo en el hecho de que elmargen de su temperatura de funcionamientolodetermina muy ampliamente la correspondienteelectrónica de evaluación a base de componentesde silicio que, en general, no puede resistir tempe-raturas tan altas como los elementos sensores mis_mos. Desde hace algún tiempo se suministran a
opción sensores activos equipados con una salidade corriente (bipolares), de modo que la econó-mica conexión bifilar de los sensores inductivos
Banera Hall.
de bobina no podrá ser considerada en el futuro ya
como una ventaja específica.
Barreras H¿ll
La utilización de sensores Hall con componentesde silicio para la medición incremental de veloci-dades de rotación implica la puesta a disposiciónde una inducción de un nivel típico de 40...50 mT,con objeto de asegurar una conmutación fiable yclara, no obstante las considerables dispersiones defabricación y efectos térmicos. Eso sólo se ha po-dido alcanzar con sensores Hall convencionales ypara anchos de entrehierro aceptables dando alsensor la forma de una "barrera Hall" (p. ej. comosensores generadores de impulsos en el distribui-dor de encendido). Los correspondientes circuitoselectrónicos de alimentación y de evaluación de lasseñales están integrados directamente en el mismochip del sensor.
Este "C.l. Hall" (realizado en tecnología bipolarpara temperaturas continuas <150 oC y conexióndirecta a la red de a bordo) se encuentra en un cir-cuito magnético prácticamente cerrado, consis-tente en un imán permanente y piezas polares(figura 3). El entrehierro aún restante lo recorreun rotor de pantallas de magnetismo dulce (p. ej.accionado por el árbol de levas). Cuando una pan-talla penetra en el entrehierro cortocircuita el flujomagnético (es decir, lo desvía del sensor); cuandola pantalla abandona el entrehierro, el hueco entrepantallas del rotor deja que el flujo atraviese sinobstáculo el sensor. El funcionamiento fiable delsensor está garantizado también si el rotor de pan-tallas penetra con profundidad irregular en la ba-rrera o si la posición del entrehierro se desplaza ensentido radial, es decir, verticalmente al sentido derotación.
Las barreras Hall de este tipo sólo se pueden reali-zar para una resolución periférica limitada y se
utilizan principalmente como sensores de segmen-tos. Si las hendiduras entre las pantallas son dema-siado estrechas, el campo magnético no atraviesaya el rotor y no puede alcanzarse ya el nivel de in-ducción necesario.
;,,,,
:l¡rll
üüüllx
J
l]]tüt
,,1ülil
Ífiil
!ü
rftll
Jilüt
üiiltit
Jlll
üJIIII
lllü
.ü
illil
iiil
Jlül
illl
,,ilII
1ll
lt
il¡
,illl
fr
I
l
Figura 3
a Flujo magnetico directo
b Flujo magnético
cortocircuitado
1 Panta ia de ancho /r
2 Piezas conductoras de
rnatera magnético
dulce
Circuito integrado Hal
Entrehierro
Tension de
aImentac ón
Tensión del sensor
3
4
[]o
I's
c!-lfiii)

.. j.rll sencillos en fbrma cle barr.a
. ': ..rtr de sensores equipados con un imán de'
- - ie t-uncionamiento dinámico no son ade-
- - - : ¡ara la exploración estática o casi estática
- : -,- ".,¡rl' nngnéticamente pasivo (figura 4a,. - -. :entada), puesto que la magnetización en
- - : -..ro de funcionamiento dinámico depende. , - :.nasiado del entrehierro (al contrario de Ia
-:.:. Hall) y el nivel de inducción alcanzable en
- -..posición es demasiado bajo para una con-* -.,:lon segura. Los umbrales de conmutación-: -,-. .ot1pár?dor de valores límite dispuesto en, - . :rigger de Schmitt) tendrían que ser cons-- - ::rente ajustados a las variaciones del punto-: --:cionamiento (flotante) del imán. Una apli--: : de este tipo sólo es posible si se renuncia a
- - .:.rplamiento de corriente continua ¡ por- - . . ¿ una evaluación estática de las señales. Los
, -:;nsadores de acoplamiento necesarios para
- ., Jisposiciones - conocidas también con la de-: ..;ión de sensores ÁQ - exigen empero unos
-:::::rbolsos adicionales y significan una pérdida:: ,::uridad de funcionamiento.
-..s sensores Hall sencillos son perfectamente
- -::rados sin embargo para explorar un r0t0r- :' : it i c amente activo (figur a 4 b, rueda polar).
- :ste caso se puede renunciar a un imán de
, --io de funcionamiento dinámico: el sensor es
-:..','¿do por el rotor únicamente alrededor del: -:to cero magnético y con polaridad alternante.
Sensores de bana de efecto Hall para la exploración derotores magnélicamente pasivos o aclivos.
Sensores de velocidad de rotación/velocidad lineal
A medida que aumenta el entrehierro disminuyepor cierto el nivel de la inducción magnética; laposición del punto de funcionamiento (B = 0), sinembargo, no varía ya. Como el punto cero de lossensores Hall de la nueva generación es amplia-mente estable a la temperatura, los umbrales deconmutación del comparador de valores límitedispuesto en serie pueden situarse bastante cercaunos de otros.
Eso hace posible realizar entrehierros de ancho re-lativamente grande. Las fluctuaciones del entrehie-rro no pueden producir en esta disposición impul-sos parásitos, pues no ocasionan ningún cambiode polaridad; este cambio caracterjzaél solo elmovimiento de medición progresivo (rotación).
Sensores cle graciiente
Los sensores (sondas) de gradiente, que pueden re-alizarse a elección sobre la base de sensores Hall ode sensores magnetorresistivos diferenciales, sonmucho más a propósito que los sensores Hall sen-cillos para 1a exploración de rotores magnética-mente pasivos. Poseen un imán permanente cuyasuperficie polar orientada hacia la rueda dentadaes homogeneizadapor una delgada plaquita ferro-magnética (figura 5). Sobre ésta hay colocados doselementos galvanomagnéticos (término genéricopara designar sensores Hall y magnetorresisten-cias) espaciados a una distancia que corresponde a
la mitad de la distancia entre dientes. De ese modo
Sensor de gradiente para exploración de una rueda dentada.
_:uro ya
r:po1ar
.,.tón
-n cir-. i--::5 -
:¡S
_:re
t.ej.r: pan-
.- tlujo::tdo, 3ntre
: ,in. del
:. pan-
-: ba-
.:za en
:lo de
:eali-'se
::men-
J.ema--.'iesa
:e in-
Figura 4
a Rotor pasivo
b Rotor act vo
1 Rotor incremental
2 C.l. Hall (senci lo)
3 lmán permanente
4 Rueda polar
5 Cala
9 Ángulo de rotación
Figura 5
1 Magneiorresistencias
/lr, R2 o elementos
Hall H,, H2
2 Substrato de material
magnétrco dulce
3 lmán permanente
4 Rueda dentada
L'o Tensión de
alimentación
[iAi í / Tensión de med c ón
para un ángulo de
rolac ón lq I
uo;O
:rl'
2
<__...-^,
E -,t'g,
S N,--
/- =_2 -
ttittu*

48 Sensores de velocidad de rotación/velocidad lineal Medición relativa de velocidades
un elemento se encuentra exactamente frente a unhueco entre dientes cuando el otro está frente a undiente. El sensor mide la diferencia de campo mag-nético entre dos puntos muy próximos en el sen-
tido periférico. La señal de salida correspondeaproximadamente a la derivación del campo mag-nético en función del ángulo periférico ¡ desde elpunto de vista de la polaridad, es independientepor tanto del entrehierro. Las variaciones del en-trehierro no producen impulsos parásitos, pues
no cambian el signo de la señal de gradiente.
P ar a la ey aluació n d e I as s eñ qle s las dos magneto -
rresistencias pueden estar sencillamente conectadas
formando un divisor de tensión que es alimentadocon una tensión constante y cuya señal de salida es
detectada por la unidad de control generalmentesin carga. A temperatura ambiente y para entrehie-rros estándar esta señal se avecina al voltio, perotambién a temperaturas más altas es aún suficien-temente grande para que se pueda transmitir a launidad de control sin ser preamplificada.
Si en lugar de la tensión sin carga del divisorde magnetorresistencia se detecta su corriente desalida bajo carga, se compensa ampliamente, me-diante un dimensionamiento adecuado, la intensaderivación de temperatura que puede influir en lasensibilidad de medición.Si se trata de una sonda de gradiente sobre la base
del efecto de Hall,las pistas de corriente de los dos
Sensor tacométrico Al\¡1R como sonda tangencialpara la exploración de una rueda dentada.
elementos Hall se pueden conectar en paralelo ysus lensiones de salida inversamente en serie, pu-diéndose tomar directamente su tensión diferen-cial y conducirla a las etapas posconectadas de am-plificación y evaluación.
Scr.rsorcs tanqencialcs
Al contrario de los sensores de gradiente, los sen-
sores tangenciales reaccionan a las variaciones de
polaridad e intensidad del componente de campomagnético tangencial a la periferia del rotor. Están
ejecutados según la tecnología de capas delgadas
AMR, en estructura "Barberpole" o también comosencillas resistencias de Permalloy conectadas en
puente integralo en semipuente (figura 6). No tie-nen que ser ajustados al paso de dientes respectivo
como los sensores de gradiente, y pueden teneruna construcción casi puntiforme. Necesitan una
electrónica de amplificación en e1 lugar mismo,aun cuando su efecto de medición es mejor(aprox. de I a2 órdenes de magnitud) que el de lossensores Hall de silicio.
Los elementos de capas delgadas AMR y el C.l.de evaluación de un sensor de velocidad de rota-ción de1 cigüeñal integrado en el cojinere (módulode retén) están dispuestos en un soporte común"lead frame'1
Por razones de ahorro de espacio y de protec-ción térmica, el C.I. de evaluación está acodado en
90" y situado bastante apartado de ia punta del
sensor.
l:lcnrcntos nr¿sncton'esistivos gigitntes ( CN I R )
En 1988 descubrió Baibich que en capas múltiplesde pocos nanómetros (nm) de espesor se produceuna variación de resistencia del 500/o cuando abajas temperaturas se aplica un campo magnéticoexterno. Este efecto de variación de la resistencia,
que es conocido con la denominación de "GiantMagneto-Resistance" (GMR), es considerable-
mente mayor que en el caso de los sensores AMR.La resistencia varía porque los sentidos de mag-
netización inicialmente antiparalelos toman una
orientación paralela desde el momento en que se
aplica un campo magnético externo. Se presenta
una saturación del efecto al aplicar un campo
magnético definido.
Los sensores GltlR se utilizan ya como cabezas
de lectura de unidades lectoras de datos de alta
"llllflillr
"üii¡,ifrl
iñ*,":l
l¡lnlnOrl¡iln
teile
,!ütllll:
-.,1
"lll::
:ri
,i[* 1
.u:.:"
ii:' i
,iii*
r'!,
l'-r
Figura 6
I Rreda dentada (Fe)
2 lnran perntanente
3 Sensor
/i Campo magnetico
de mando de con¡-
ponente tangencral
1i y componente ra.
d al /i (/i' pos c on
de reposo, 1i, :0)/lr. /i' resistenc as
de capas delgadas
de Permalloy {A[lR)
9 Ángu o cle rotaoon
t Tens on de
alimentac on
I ; Te¡s ón de nred c on
I 1"1
-T{

Sensores de velocidad de rotación/velocidad lineal
-::.:idad de memorización. La detección de velo-
. --:Jes de rotación es el objetivo primordial de
-, ,;ación en el sector del automóvil - todavía
- .. de su utilización como sensores de recorrido
-. :osición angular.
,' ()\ de aplicación
¡ :.r sor Hall (encendido transistorizado TZ-H),. ::rsor de fase Hall (árbol de levas),
o ,:r'rSor Hall de cajas de cambios (RS50, RS51),
r ::rsor activo Hall de velocidad de rotación,
o ::rSor activo AMR de velocidad de rotación,
r ,:rSor magnetorresistivo (para bomba rotativa
-. invección diesel de émbolos radiales).
','edición absoluta de, :locidades de rotación
I 'ómetros de vibración
, -.ios funclanrentales. ..roscopios mecánicos aprovechan las fuerzas
-: :rCi? para medir con mucha precisión movi-" : ..trS angulares en el espacio, independiente-
- : -.; de sistemas de referencia. A pesar de su gran
. . : ...d para la medición, ni los girómetros de
- - ,:opio ni los sensores ópticos basados en el
: . .lt Sagnac (girómetros de láser o de fibra
:: entran en consideración para sistemas del
. -' ::ovil, a causa de aspectos económicos muy
--:r!os., : el contrario, las exigencias de precisión no
, - ::'. ir?s de nuevos sistemas del automóvil se
- .: -:: satisfacer mediante girómetros realizados. - ::lnica de precisión o micromecánica, que' : - :e un movimiento de rotación aprovechan
. - - -:-.inte un movimiento vibratorio elástico
,-<nte para la generación de un efecto de-' : - -,r1. Estos sensores llamados girómetros de
- .'',: o sensores de convolución por diapasón
, - -:--izados hasta ahora predominantemente' .'- :..ulaciones de estabilización. Responden
- .:: en grado suficiente a todas las otras exi-
- ' - ., específicas del automóvil, tales como exen-- -. :rantenimiento, vida útil, constante de la
. -'- - : de funcionamiento, etc., incluso respecto
- ,:es de fabricación que cabe esperar.
- :, :'netros de vibración miden el ángulo de
- :.riuto O, sobre el eje vertical del vehículo
, -. :'riñada) p. ej. en sistemas para la regula-
Conelación entre velocidad de convolución,movimiento vibratorio y aceleración de Coriolis en
una masa puntual rr.
ción de la dinámica de marcha (ESR estabilización
de fenómenos de derrape) y parala navegación de
corta duración (p. ej. en lazonade un cruce de ca-
rreteras). Sistemas avanzados para 1a activación de
sistemas de protección contra el vuelco necesitan
las velocidades de convolución g* e g, alrededor
de los ejes alzable y de cabeceo del vehículo. El
principio de estos sensores se asemeja al de los gi-
roscopios mecánicos. Aprovechan para la medi-
ción las aceleraciones de Coriolis que se presentan
cuando se producen movimientos de rotación fJacompañados de un movimiento vibratorio (velo-
cidad u). Según una conocida ley de vectores, estas
aceleraciones son perpendiculares a las otras dos
dimensiones (figura l):
dcoriol¡s =lix=2.du..,r. d, (1)
La velocidad uuvaría siguiendo un curso sinusoi-
dal en función del movimiento vibratorio:
uy=iy'sin¿r.r.t (2)
De ese modo se mide, con una velocidad de convo-
lución g. constante, también una aceleración de
Coriolis sinusoidal a6o,¡e¡¡s de posiciones de fre-
cuencia y de fase iguales. El valor de amplitud es
entonces:
dcorior¡s - 2 .iu' Q. (3)
Esta aceleración la puede percibir y medir un ob-
servador que r,iaje sobre Ia masa puntual nr.
:-elo y::e. pu-
r, Je am-
', eiC.l.:: rota-
:odulo:-.:lún
::!rteC-
,-;edo en
,: del
.:i:ultiples::oduce
:-¿o a
:.snético
-::encia,
Giant
:::1e-
=s \MR.. je mag-
-:l una
: que se
':asenta
-:rf o
, :¡bezas
:: ¿'lta
Figura 1
!l- Ve oc dad de
convoluc on
l Velocidad del
movimiento
vlbrator o
rr¡., , .. Aceleración
deCoro s
rir \lasa puntual

Sensores de velocidad de rotación/velocidad lineal lVledición absoluta de velocidades de rotación/sensores de radar
Para detectar la velocidad de convolución se
mantiene la amplitud de la velocidad del movi_miento vibratorio a un valor constante con laayuda de una regulación apropiada y se demodulala aceleración de Coriolis medida sobre la masa vi-brante m,por selección de la fase y de la frecuencia(p. ej. con la ayuda de un amplificador síncrono).La señal de aceleración se libera simultáneamentede aceleraciones externas (p. ej. aceleración de lacarrocería).
De ello resulta una tensión de salida,que es pro-porcional a la velocidad de convolución:
UA=const 'áCo¡otis=consf'.Q (4)
La aceleración au que actúa asimismo sobre lamasa m en el sentido de vibración, alcanza un va_lor generalmente superior en varias potencias dediez a laaceleración útil de Coriolis:
Sensores de radar
Para medir la "velocidad de marcha en relacióncon el suelo u¡" de vehículos especiales con consi-derable resbalamiento a la tracción (p, ej. tractoresagrícolas) se utilizan sencillos sistemas radar decorta distancia de efecto Doppler Qa...35 GHz)(de bajo coste) (figuras 1 y 3).
Elhaz radárico de la cabeza emisora/receptoramontada a cada lado del vehículo alcanza el suelooblicuamente con un ángulo a en el sentido de
marcha. Si hubiera allí un receptor, recibiría él laseñal continua, emitida inicialmente con la fre-cuencia/s, con una frecuencia/ más alta a causadel efecto Doppler, pues la fuente emisora se mo-víahacia él (efecto semejante al de la sirena tipoMartin en la acústica):
m
JI
I
dt,,,nv= -¡"= a'uy.cos cr,t.t
La influencia de la aceleración a, alterada por dia-fonía es anulada tanto por la selectividad direccio-nal del acelerómetro de Coriolis y de su montajeangular correcto (factor 102... l0a) como tambiénpor la rectificación de la señal de Coriolis deacuerdo con la fase correcta; pues la aceleración vi-bratoriaparásitaestá desfasada en 90o en relacióna la señal útil. El aumento de la relación entre laseñal parásita y la senal útil es sin embargo pro-porcional al acrecentamiento de la frecuencia.
Ejemplos cle aplicacióno Sensores piezoeléctricos de velocidad de
convolución,
. sensores micromecánicos de velocidad deconvolución MMt yMM2.
fl=fo C-Up'CoSA
El suelo, sin embargo, refleja la señal hacia la ca-beza emisora/receptora. Ahora se ajusta otra vezuna frecuenciafr aparentemente más elevada en ellugar de recepción, pues el receptor se mueve esta
vez hacia la fuente emisora:
f^_t. C+U¡.COSA _t C*U¡.COSeJz=Jt-=ñ=loffi(7)
De ello resulta en total un desplazamiento de fre-cuencia lf de:
).Lfz=fz-ft=fo ++## (8)
e inversamente 1a velocidad ¿'e:
(6)(s)
, lz-tc ^ I t /[r-' COS U f2 - t^ -1 r'¿t5 A. fO \/ )




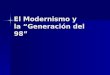

















![Sensores en el automóvil - 1[1]](https://img.pdfslide.tips/doc/110x75/5572030d4979599169a47904/sensores-en-el-automovil-11.jpg)