Embed Size (px)
Citation preview
José Manuel Pastor GarcíaJosé Manuel Pastor García
Curso de VeranoDiseño y construcción de un micro-robot
Curso de VeranoCurso de VeranoDiseño y construcción de un microDiseño y construcción de un micro--robotrobot
Sensores para micro-robots
ContenidoContenidoContenido
IntroducciónTecnologías y tipos de sensoresSensores de presenciaSensores de distanciaSensores de posiciónAplicaciones
IntroducciónIntroducciónIntroducción
Objetivos:• Control del movimiento• Detección del entorno
ObstáculosMarcasOtros robots
• Seguridad
Tipos de robotsTipos de robotsTipos de robots
Base fija: ArticuladosMóviles con patas:• Una pata• Mamíferos:
BípedosCuatro patas
• Reptiles • Insectos
Móviles con ruedas• Dos ruedas• Tres ruedas• Cuatro ruedas• + ruedas, orugas …
¿Cómo se controlasu movimiento?
Competiciones de Micro-RobotsCompeticiones de MicroCompeticiones de Micro--RobotsRobots
SumoRastreadoresVelocidadLaberintoBomberosFútbolPrueba libre
¿Qué percepción necesitan?
¿Cuál será su característicamás importante?
¿Qué es percepción?¿Qué es percepción?¿Qué es percepción?
Captar información Sensor• Un elemento eléctrico/mecánico/químico capaz
de convertir una característica del entorno en una medida cuantitativa
Cada sensor se basa en un principio de transducción: conversión de la energía de una forma a otra
Sentidos y órganos humanosSentidosSentidos y y órganosórganos humanoshumanos
Visión: ojos (óptico, luz)Oído: oídos (acústico, sonido)Tacto: piel (mecánico, calor, textura, ...)Olor: nariz (química, vapores)Gusto: lengua (química, líquidos)
Extensión del rango de percepción humano
Extensión del rango de percepción Extensión del rango de percepción humanohumano
Visión fuera del espectro visible• Cámara de Infrarrojos, visión nocturna
Visión activa• Medición con radar, sonar, láser, ...
Sonidos fuera del rango de los 20 Hz – 20 kHz• Medición con ultrasonidos
Análisis químicos que sustituyan el gusto o el olfato• Nariz electrónica
Radiación: α, β, γ-rays, neutrones, etc.
Transducción a magnitud eléctricaTransducción a magnitud eléctricaTransducción a magnitud eléctrica
Termistor: temperatura-resistenciaElectroquímica: química-tensiónFotoeléctrica: intensidad de luz-corrientePiro-eléctrica: radiación térmica-tensiónHumedad: humedad-capacitanciaLongitud (LVDT: Linear variable differentialtransformers): posición-inductanciaMicrófono: presión del sonido-tensión
Fusión e Integración SensorialFusión e Integración SensorialFusión e Integración Sensorial
Hombre: un órgano un sentido?• No necesariamente
Balance: orejasTacto: lenguaTemperatura: piel
Robot: • Fusión Sensorial:
Combina lecturas de distintos sensores en una estructura de datos uniforme
• Integración Sensorial:Usa la información de distintos snesores para hacer algo útil
Fusión sensorialFusión sensorialFusión sensorial
Un sensor no es suficiente habitualmente• Los sensores proporcionan medidas con ruido• La precisión esta limitada• No son totalmente fiables• La información que proporcionan del entorno
es limitada e incompleta, único punto de vista• La elección de un sensor puede resultar más
cara que la combinación de dos o más sensores más baratos
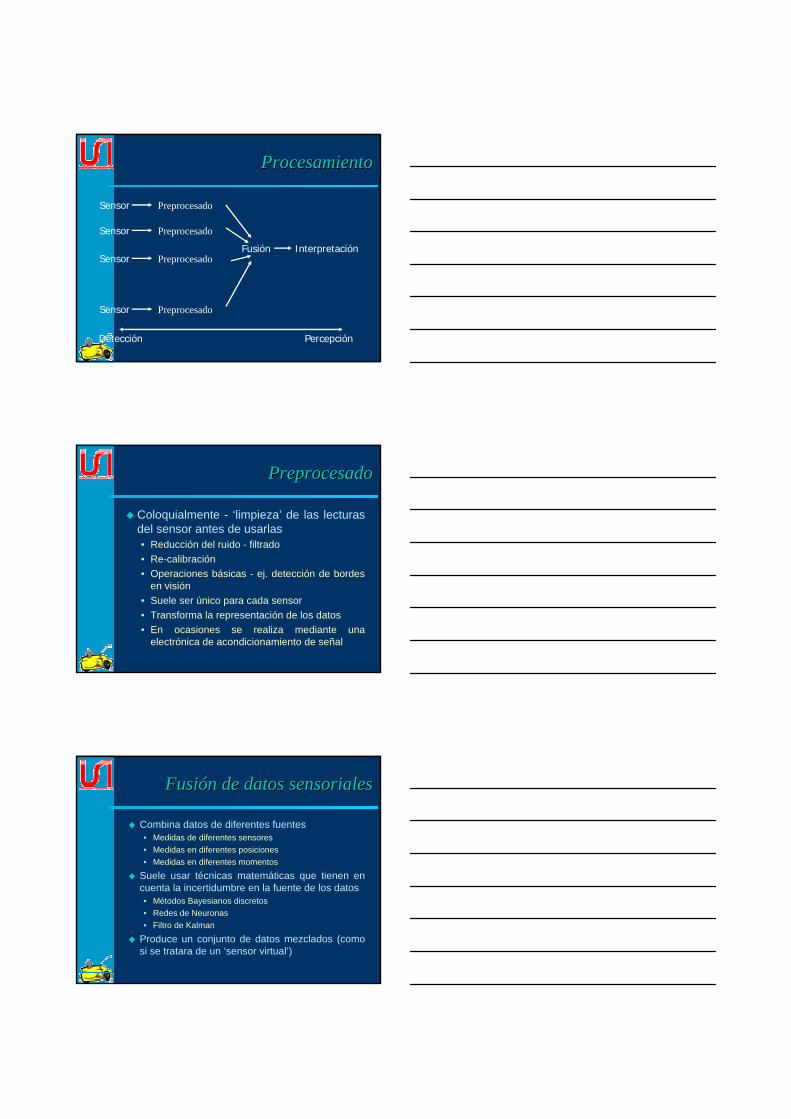
ProcesamientoProcesamientoProcesamiento
Fusión Interpretación
Sensor
Sensor
Sensor
Sensor
Detección Percepción
Preprocesado
Preprocesado
Preprocesado
Preprocesado
PreprocesadoPreprocesadoPreprocesado
Coloquialmente - ‘limpieza’ de las lecturas del sensor antes de usarlas• Reducción del ruido - filtrado• Re-calibración• Operaciones básicas - ej. detección de bordes
en visión• Suele ser único para cada sensor• Transforma la representación de los datos • En ocasiones se realiza mediante una
electrónica de acondicionamiento de señal
Fusión de datos sensorialesFusión de datos sensorialesFusión de datos sensoriales
Combina datos de diferentes fuentes• Medidas de diferentes sensores• Medidas en diferentes posiciones• Medidas en diferentes momentos
Suele usar técnicas matemáticas que tienen en cuenta la incertidumbre en la fuente de los datos• Métodos Bayesianos discretos• Redes de Neuronas• Filtro de Kalman
Produce un conjunto de datos mezclados (como si se tratara de un ‘sensor virtual’)
InterpretaciónInterpretaciónInterpretación
Específica de cada tareaHabitualmente utiliza información a-priori del problema para encontrar una mejor solución “Tricky“
Clasificaciones Clasificaciones Clasificaciones
Estado interno (proprioception) v.s. Estado externo (exteroceptive)• Realimentación de parámetros internos del robot, ej.
nivel de baterías, posición, velocidad, ángulos articulaciones, etc,
• Observación del entorno, objetos, etc.Activos v.s. pasivos• Emiten energía al entorno, ej., radar, sonar• Reciben la energía de forma pasiva, ej., cámara
Contacto v.s. sin-contactoVisuales v.s. no-visuales• Percepción basada en visión y procesamiento de
imágenesDigitales v.s. analógicos
Tipos de sensoresTipos de Tipos de sensoressensoresPresencia y/o distancia• Contacto, inductivo, capacitivo, óptico, ultrasonido, láser
Posición (lineal o angular)• Analógicos
PotenciómetrosResolver, SincroLVDT, Inductosyn
• DigitalesEncoders absolutosEncoders incrementalesRegla óptica
Orientación:• Brújula, giróscopo, inclinómetro, etc.
Posición absoluta• GPS, balizas activas, RF o ultrasonidos, balizas pasivas
Velocidad: Dinamo tacométricaAceleración, fuerza, carga: Acelerómetros, células de cargaSensores de visión: Cámaras
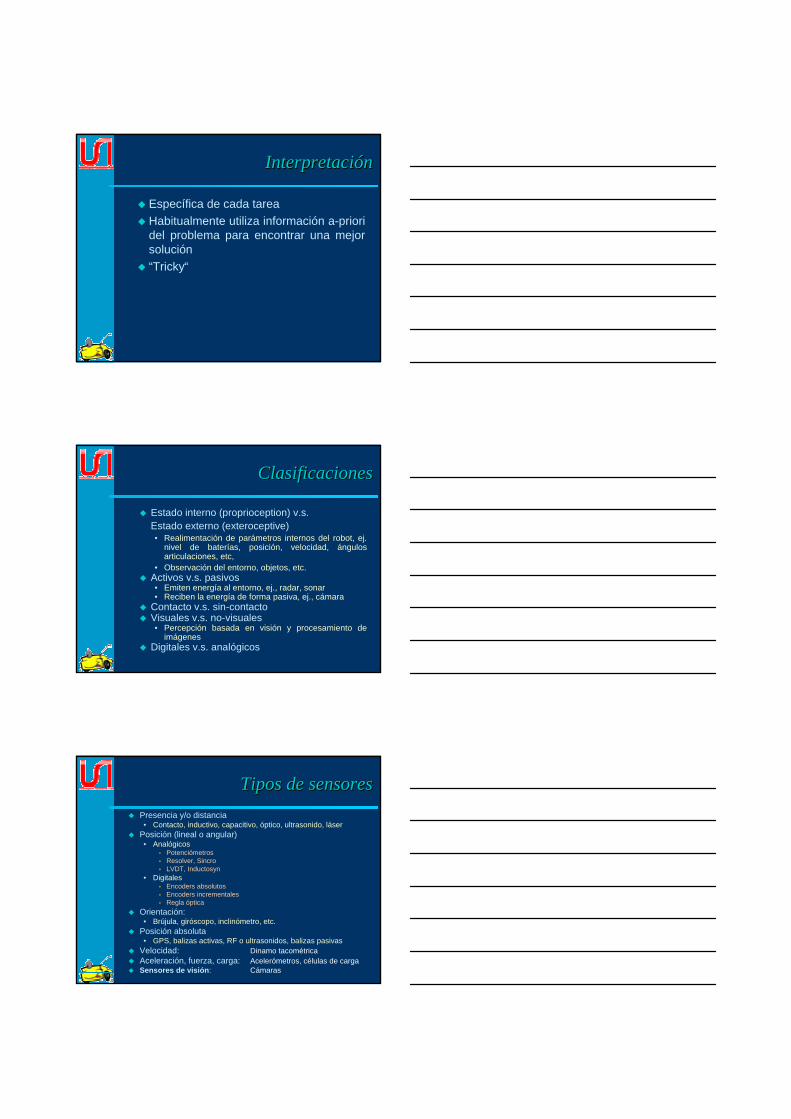
Caracterización del comportamiento de los sensores
Caracterización del comportamiento Caracterización del comportamiento de los de los sensoressensores
Parámetros básicos:• Rango dinámico:
Máximo valor / mínimo valor medibleDecibelios: 20 log (max./min.)
• Rango• Resolución
Sensor analógico: mínimo valor medible• Linealidad
Dentro del rango• Ancho de banda
Comportamiento real• Sensibilidad• Cross-sensitivity
Sensibilidad a parámetros externos.• Error, precisión• Repetibilidad• Errores aleatorios
Caracterización del comportamiento de los sensores
Caracterización del comportamiento Caracterización del comportamiento de los de los sensoressensores
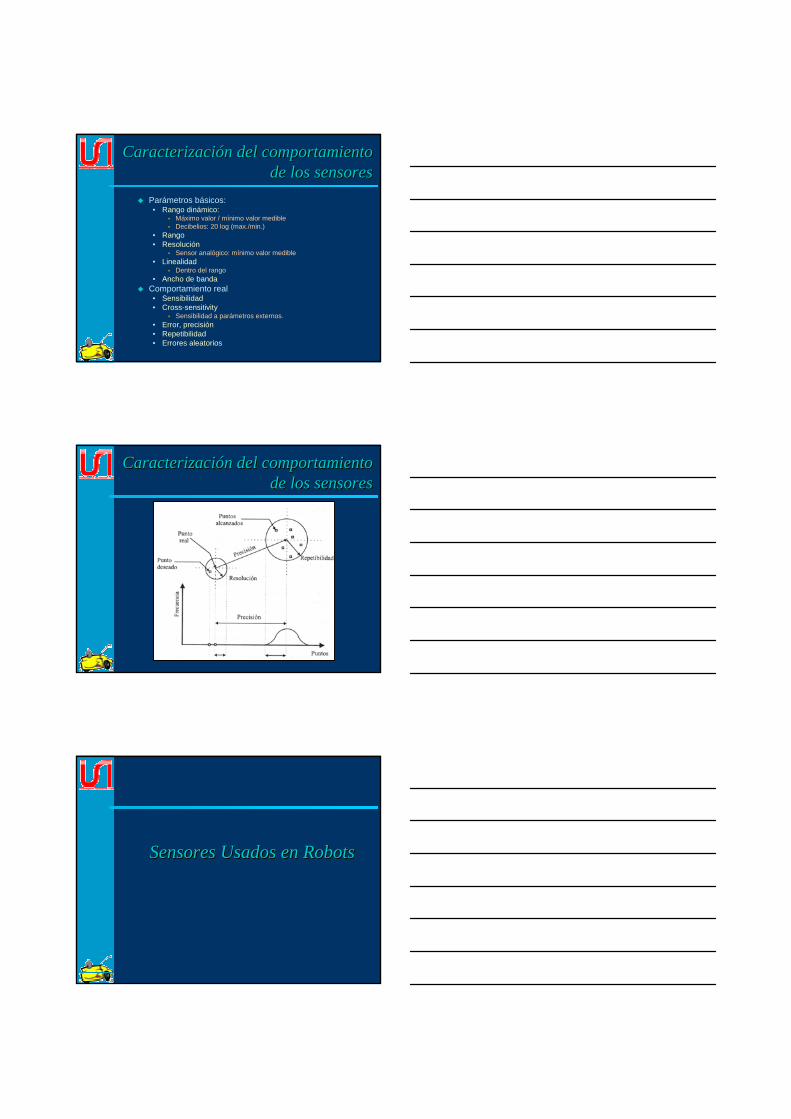
Sensores Usados en RobotsSensoresSensores Usados en RobotsUsados en Robots
Solar Cell
Digital Infrared Ranging
Compass
Touch SwitchPressure Switch
Limit Switch
Magnetic Reed Switch
Magnetic Sensor
Miniature Polaroid Sensor
Polaroid Sensor Board
Piezo Ultrasonic Transducers
Pyroelectric Detector
Thyristor
Gas Sensor
Gieger-MullerRadiation Sensor
Piezo Bend Sensor
Resistive Bend Sensors
Mechanical Tilt Sensors
Pendulum Resistive Tilt Sensors
CDS Cell Resistive Light Sensor
Hall EffectMagnetic Field
Sensors
Compass
IRDA TransceiverIR Amplifier Sensor
IR ModulatorReceiverLite-On IR
Remote Receiver
Radio ShackRemote Receiver
IR Sensor w/lens
GyroAccelerometer
IR ReflectionSensor
IR Pin Diode
UV Detector
Metal Detector
Sensores Usados en RobotsSensoresSensores Usados en RobotsUsados en Robots
Sensores TáctilesSensores Resistivos• Sensores deformación, potenciómetros, fotocélulas, ...
Sensores de Infrarrojos• Reflexión, proximidad, distancia…
Sensores de UltrasonidosSensores Inerciales (miden la segunda derivada de la posición)• Acelerómetros, giróscopos,
Sensores de Orientación• Brújula, Inclinómetro
Sensores láserVisión, GPS, …
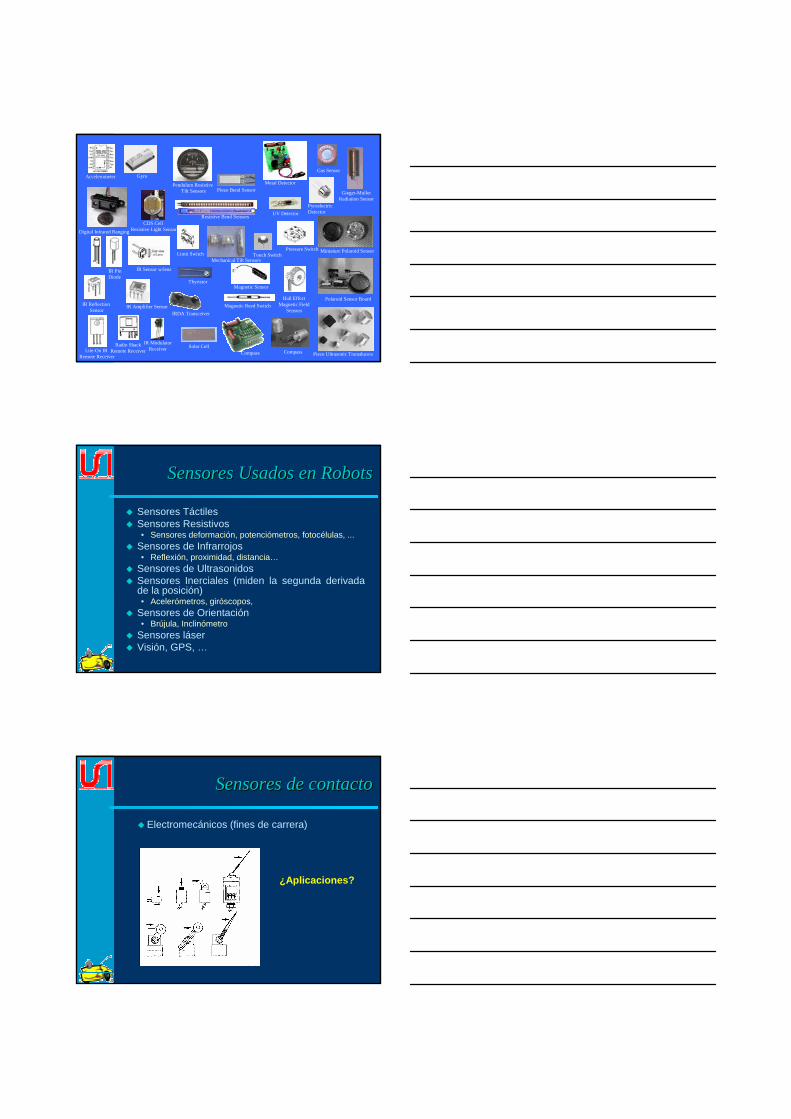
Sensores de contactoSensoresSensores de contactode contacto
Electromecánicos (fines de carrera)
¿Aplicaciones?
Sensores de proximidad.Inductivos
SensoresSensores de proximidad.de proximidad.InductivosInductivos
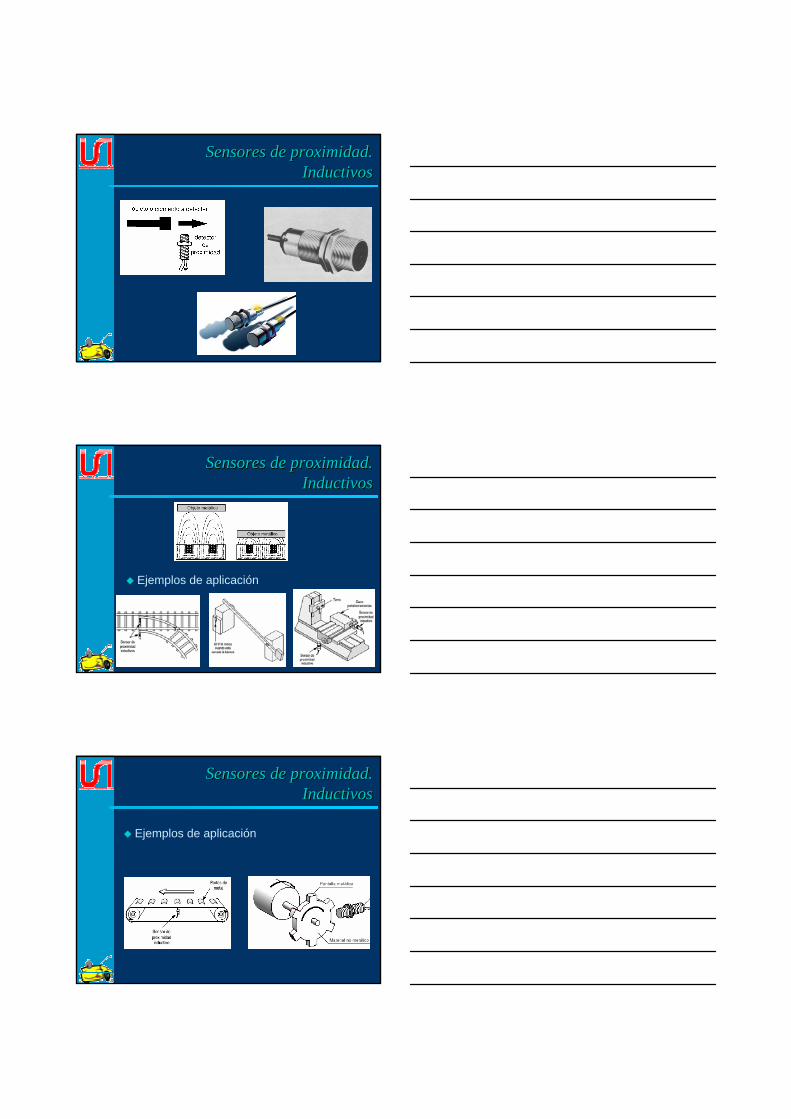
Sensores de proximidad.Inductivos
SensoresSensores de proximidad.de proximidad.InductivosInductivos
Ejemplos de aplicación
Sensores de proximidad.Inductivos
SensoresSensores de proximidad.de proximidad.InductivosInductivos
Ejemplos de aplicación
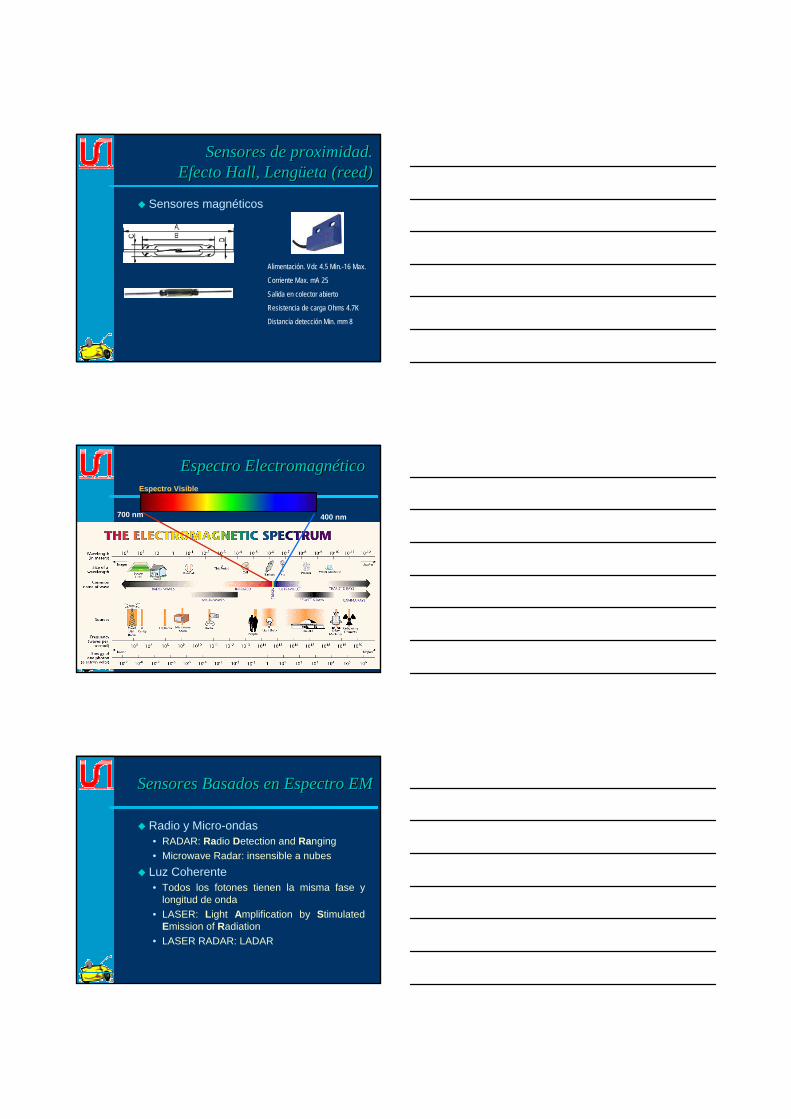
Sensores de proximidad.Efecto Hall, Lengüeta (reed)
SensoresSensores de proximidad.de proximidad.Efecto Efecto HallHall, Lengüeta (, Lengüeta (reedreed))
Sensores magnéticos
Alimentación. Vdc 4.5 Min.-16 Max.
Corriente Max. mA 25
Salida en colector abierto
Resistencia de carga Ohms 4.7K
Distancia detección Min. mm 8
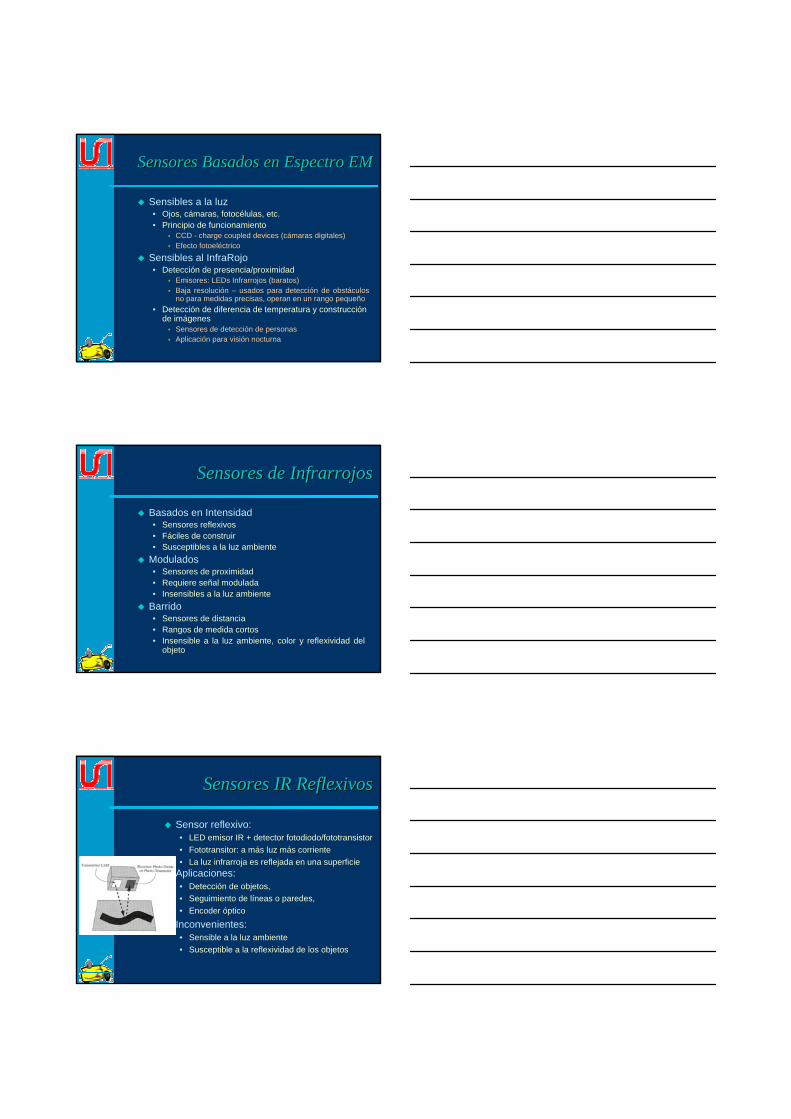
Espectro ElectromagnéticoEspectro ElectromagnéticoEspectro ElectromagnéticoEspectro Visible
700 nm 400 nm
Sensores Basados en Espectro EMSensoresSensores Basados en Espectro EMBasados en Espectro EM
Radio y Micro-ondas• RADAR: Radio Detection and Ranging• Microwave Radar: insensible a nubes
Luz Coherente• Todos los fotones tienen la misma fase y
longitud de onda• LASER: Light Amplification by Stimulated
Emission of Radiation• LASER RADAR: LADAR
Sensores Basados en Espectro EMSensoresSensores Basados en Espectro EMBasados en Espectro EM
Sensibles a la luz• Ojos, cámaras, fotocélulas, etc.• Principio de funcionamiento
CCD - charge coupled devices (cámaras digitales)Efecto fotoeléctrico
Sensibles al InfraRojo• Detección de presencia/proximidad
Emisores: LEDs Infrarrojos (baratos)Baja resolución – usados para detección de obstáculos no para medidas precisas, operan en un rango pequeño
• Detección de diferencia de temperatura y construcción de imágenes
Sensores de detección de personasAplicación para visión nocturna
Sensores de InfrarrojosSensoresSensores de Infrarrojosde Infrarrojos
Basados en Intensidad• Sensores reflexivos• Fáciles de construir• Susceptibles a la luz ambiente
Modulados• Sensores de proximidad• Requiere señal modulada• Insensibles a la luz ambiente
Barrido• Sensores de distancia• Rangos de medida cortos• Insensible a la luz ambiente, color y reflexividad del
objeto
Sensores IR ReflexivosSensoresSensores IR IR ReflexivosReflexivos
Sensor reflexivo: • LED emisor IR + detector fotodiodo/fototransistor• Fototransitor: a más luz más corriente• La luz infrarroja es reflejada en una superficie
Aplicaciones:• Detección de objetos, • Seguimiento de líneas o paredes, • Encoder óptico
Inconvenientes:• Sensible a la luz ambiente • Susceptible a la reflexividad de los objetos
Sensores de presencia/proximidadÓpticos
SensoresSensores de presencia/proximidadde presencia/proximidadÓpticosÓpticos
Ejemplos de aplicación
Sensores IR ModuladosSensoresSensores IR IR ModuladosModuladosModulación y demodulación• Demodulador es sintonizado a la frecuencia específica de los
flashes de luz (32kHz~45kHz)• Flashes pueden ser detectados aunque sean muy estrechos• Menos susceptible a la luz ambiente y reflexión de los objetos• Utilizado en la mayoría de las unidades de control remoto
Lógica negativa:
Detecta = 0v
No detecta = 5v
Sensores de proximidad IRSensoresSensores de proximidad IRde proximidad IR
Sensores de proximidad: • Requiere un LED IR modulado• Rango de detección: varia según los objetos (blancos y brillantes, oscuros)
Aplicaciones:• Medidor de distancias (poco precisión)• Evitar obstáculos• Seguimiento de paredes o líneas
limitador demoduladorFiltro pasabandaamplificador
comparadorintegrador
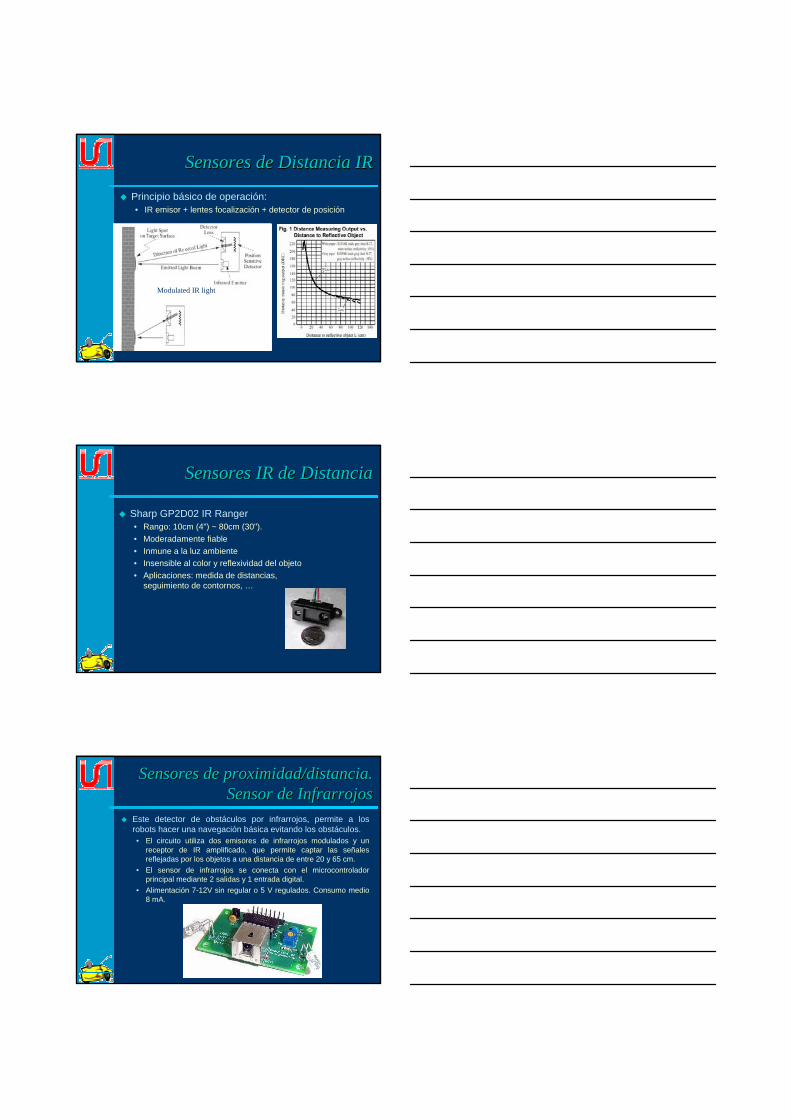
Sensores de Distancia IRSensoresSensores de de DistanciaDistancia IRIR
Principio básico de operación:• IR emisor + lentes focalización + detector de posición
Modulated IR light
Sensores IR de DistanciaSensoresSensores IR de IR de DistanciaDistancia
Sharp GP2D02 IR Ranger• Rango: 10cm (4") ~ 80cm (30").• Moderadamente fiable• Inmune a la luz ambiente• Insensible al color y reflexividad del objeto• Aplicaciones: medida de distancias,
seguimiento de contornos, …
Sensores de proximidad/distancia.Sensor de Infrarrojos
SensoresSensores de proximidad/distancia.de proximidad/distancia.SensorSensor de Infrarrojosde Infrarrojos
Este detector de obstáculos por infrarrojos, permite a los robots hacer una navegación básica evitando los obstáculos. • El circuito utiliza dos emisores de infrarrojos modulados y un
receptor de IR amplificado, que permite captar las señales reflejadas por los objetos a una distancia de entre 20 y 65 cm.
• El sensor de infrarrojos se conecta con el microcontrolador principal mediante 2 salidas y 1 entrada digital.
• Alimentación 7-12V sin regular o 5 V regulados. Consumo medio 8 mA.
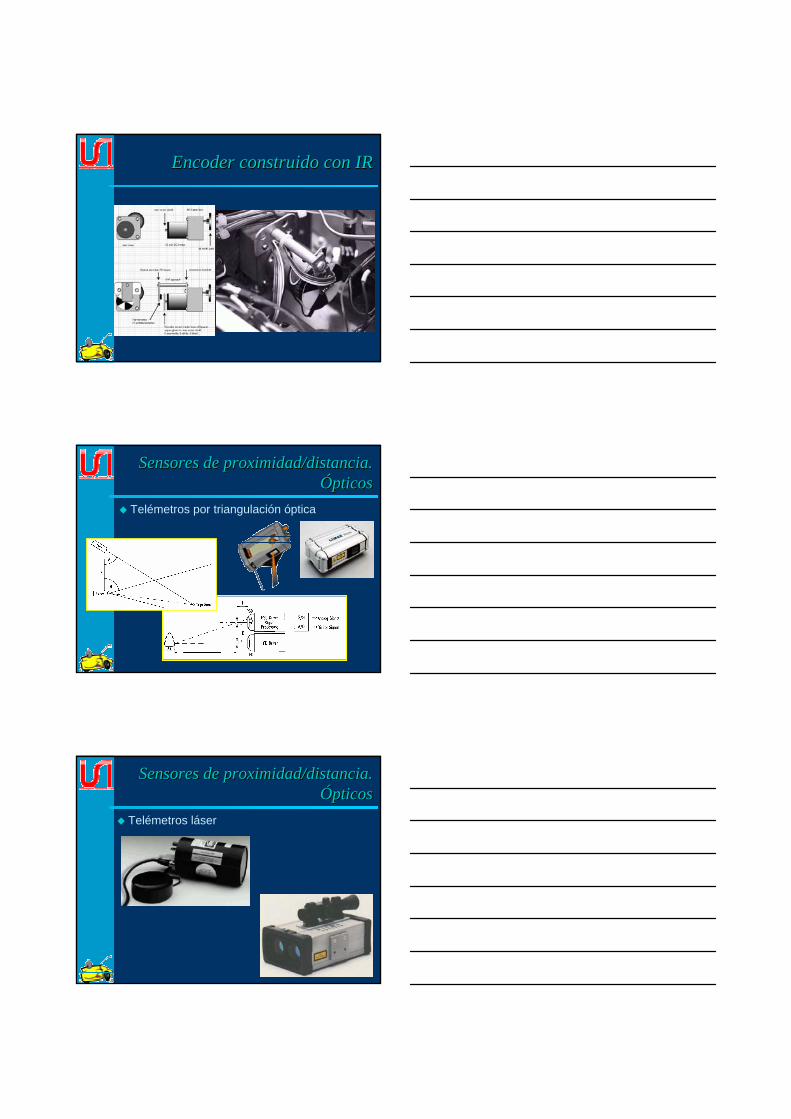
Encoder construido con IREncoderEncoder construido con IRconstruido con IR
Sensores de proximidad/distancia.Ópticos
SensoresSensores de proximidad/distancia.de proximidad/distancia.ÓpticosÓpticos
Telémetros por triangulación óptica
Sensores de proximidad/distancia.Ópticos
SensoresSensores de proximidad/distancia.de proximidad/distancia.ÓpticosÓpticos
Telémetros láser
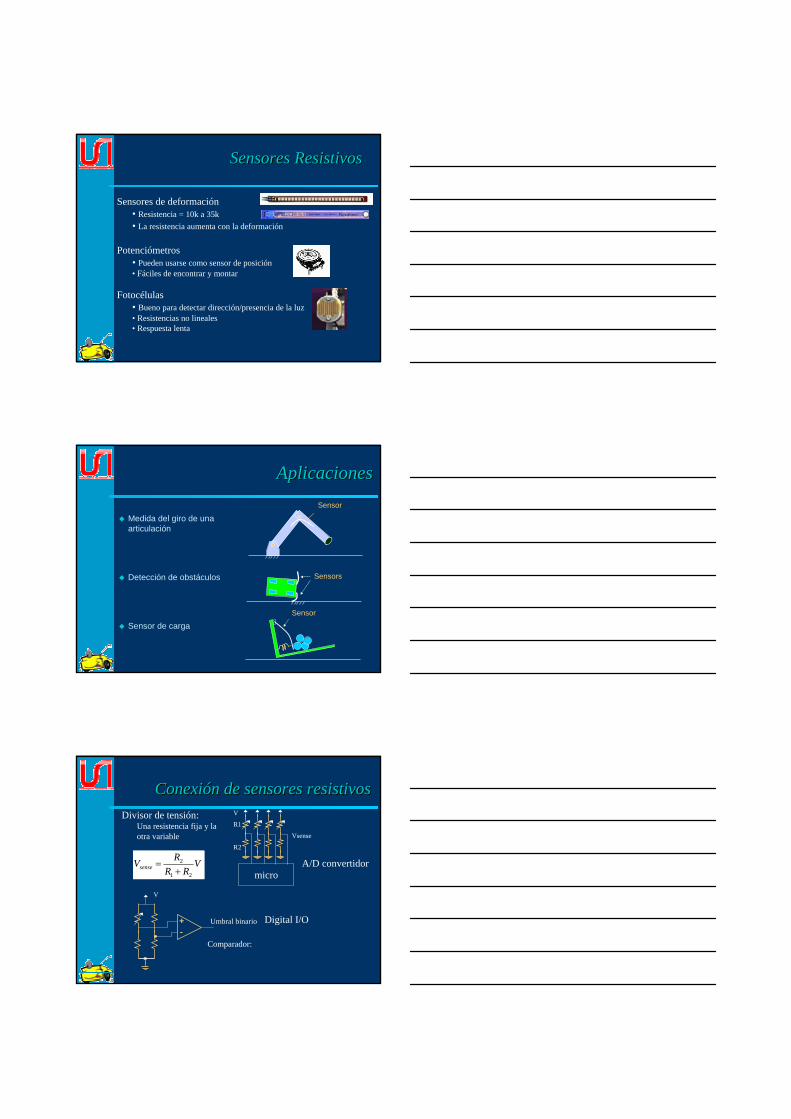
Sensores de deformación• Resistencia = 10k a 35k• La resistencia aumenta con la deformación
Potenciómetros• Pueden usarse como sensor de posición• Fáciles de encontrar y montar
Fotocélulas• Bueno para detectar dirección/presencia de la luz• Resistencias no lineales• Respuesta lenta
Sensores ResistivosSensoresSensores ResistivosResistivos
Sensor
Medida del giro de unaarticulación
Detección de obstáculos
Sensor de carga
Sensors
Sensor
AplicacionesAplicacionesAplicaciones
Conexión de sensores resistivosConexiConexióónn de de sensoressensores resistivosresistivosDivisor de tensión:
Una resistencia fija y la otra variable
V
micro
R1
R2
Vsense
Comparador:
+-
Umbral binario
V
VRR
RVsense21
2
+= A/D convertidor
Digital I/O
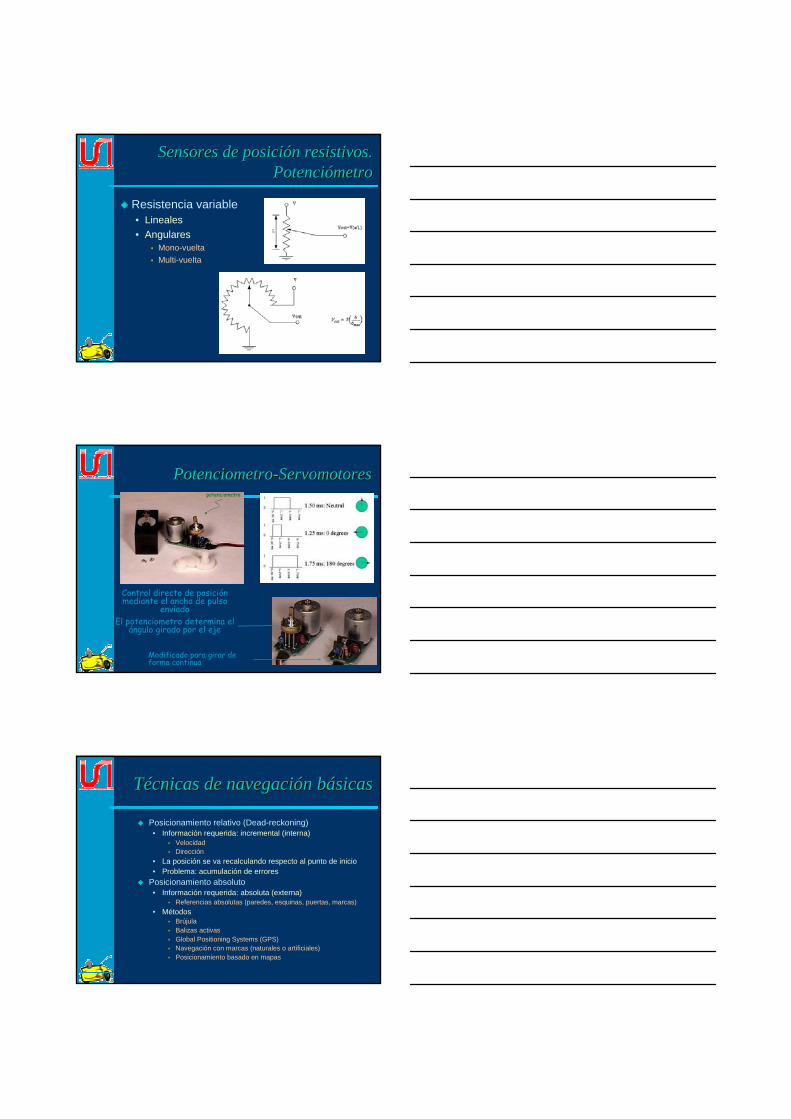
Sensores de posición resistivos.Potenciómetro
SensoresSensores de posición resistivos.de posición resistivos.PotenciómetroPotenciómetro
Resistencia variable• Lineales • Angulares
Mono-vueltaMulti-vuelta
Potenciometro-ServomotoresPotenciometroPotenciometro--ServomotoresServomotores
Control directo de posiciónmediante el ancho de pulso
enviadoEl potenciometro determina el
ángulo girado por el eje
Modificado para girar de forma continua
potenciometro
Técnicas de navegación básicasTécnicasTécnicas de de navegaciónnavegación básicasbásicas
Posicionamiento relativo (Dead-reckoning)• Información requerida: incremental (interna)
VelocidadDirección
• La posición se va recalculando respecto al punto de inicio• Problema: acumulación de errores
Posicionamiento absoluto • Información requerida: absoluta (externa)
Referencias absolutas (paredes, esquinas, puertas, marcas)• Métodos
BrújulaBalizas activasGlobal Positioning Systems (GPS)Navegación con marcas (naturales o artificiales)Posicionamiento basado en mapas
Causas de la acumulación de errores
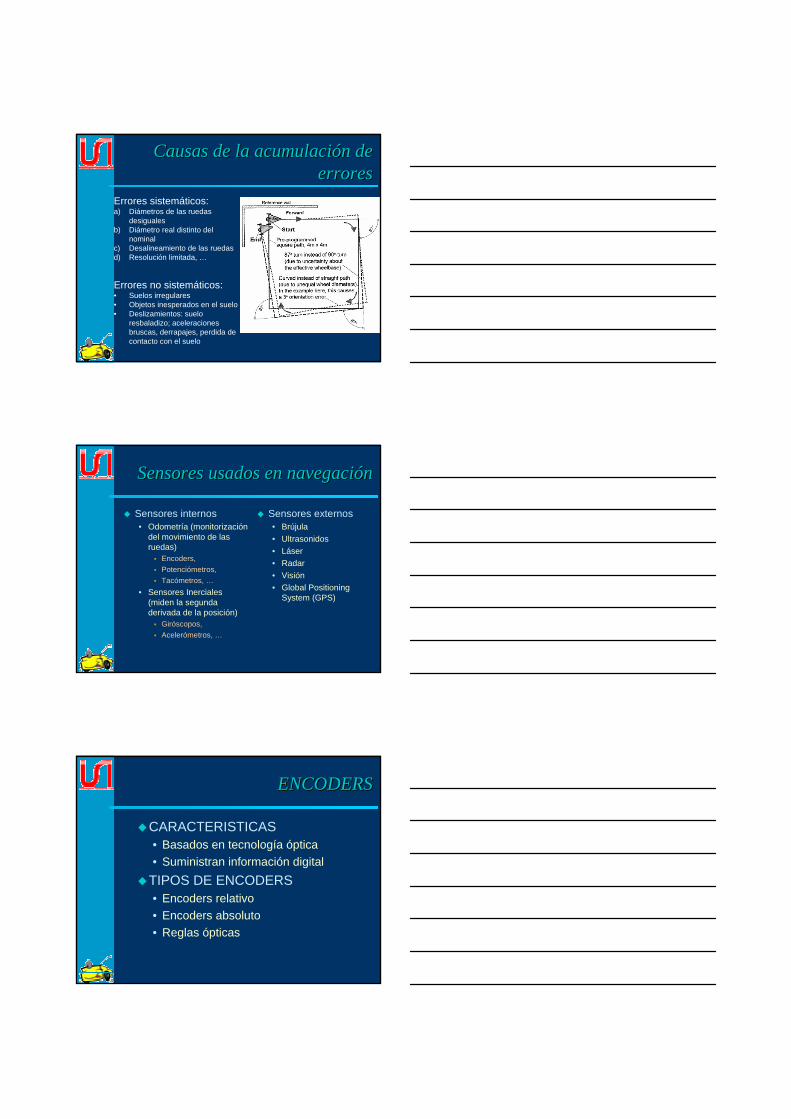
CausasCausas de la de la acumulaciónacumulación de de erroreserrores
Errores sistemáticos:a) Diámetros de las ruedas
desigualesb) Diámetro real distinto del
nominalc) Desalineamiento de las ruedasd) Resolución limitada, …
Errores no sistemáticos:• Suelos irregulares• Objetos inesperados en el suelo• Deslizamientos: suelo
resbaladizo; aceleraciones bruscas, derrapajes, perdida de contacto con el suelo
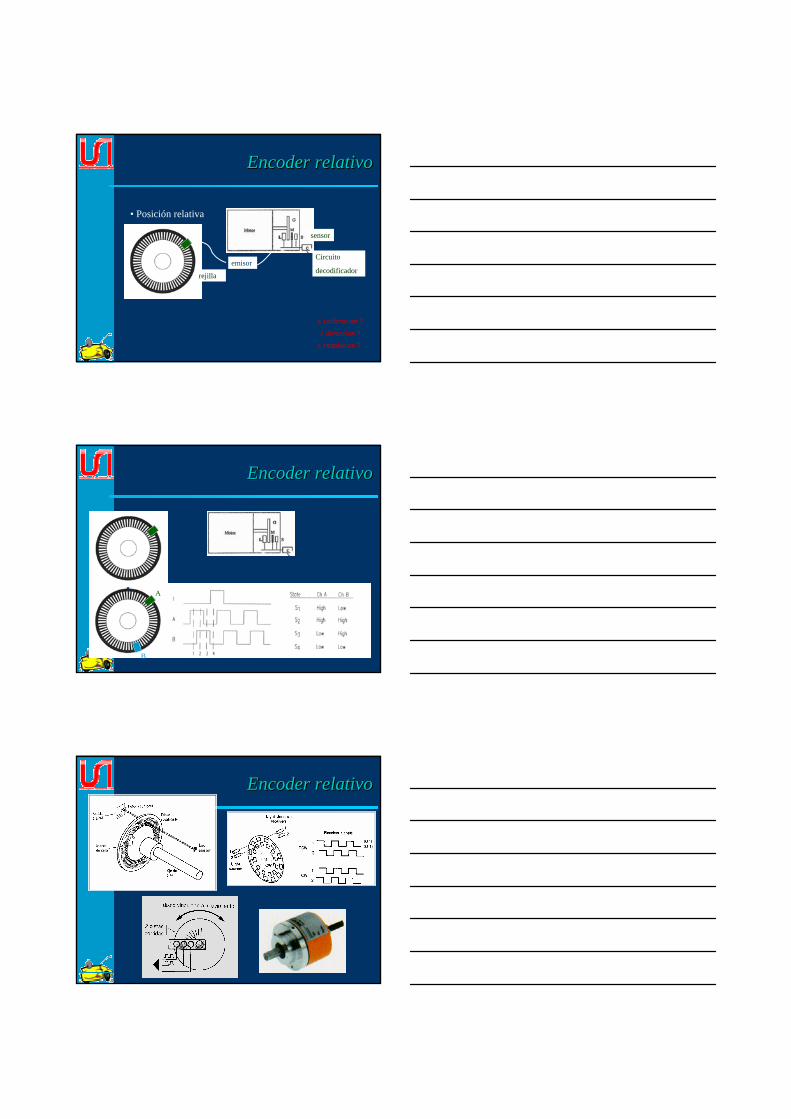
Sensores usados en navegaciónSensoresSensores usados en navegaciónusados en navegación
Sensores internos• Odometría (monitorización
del movimiento de las ruedas)
Encoders,Potenciómetros,Tacómetros, …
• Sensores Inerciales (miden la segunda derivada de la posición)
Giróscopos,Acelerómetros, …
Sensores externos• Brújula• Ultrasonidos• Láser• Radar• Visión• Global Positioning
System (GPS)
ENCODERSENCODERSENCODERS
CARACTERISTICAS• Basados en tecnología óptica• Suministran información digital
TIPOS DE ENCODERS• Encoders relativo• Encoders absoluto• Reglas ópticas
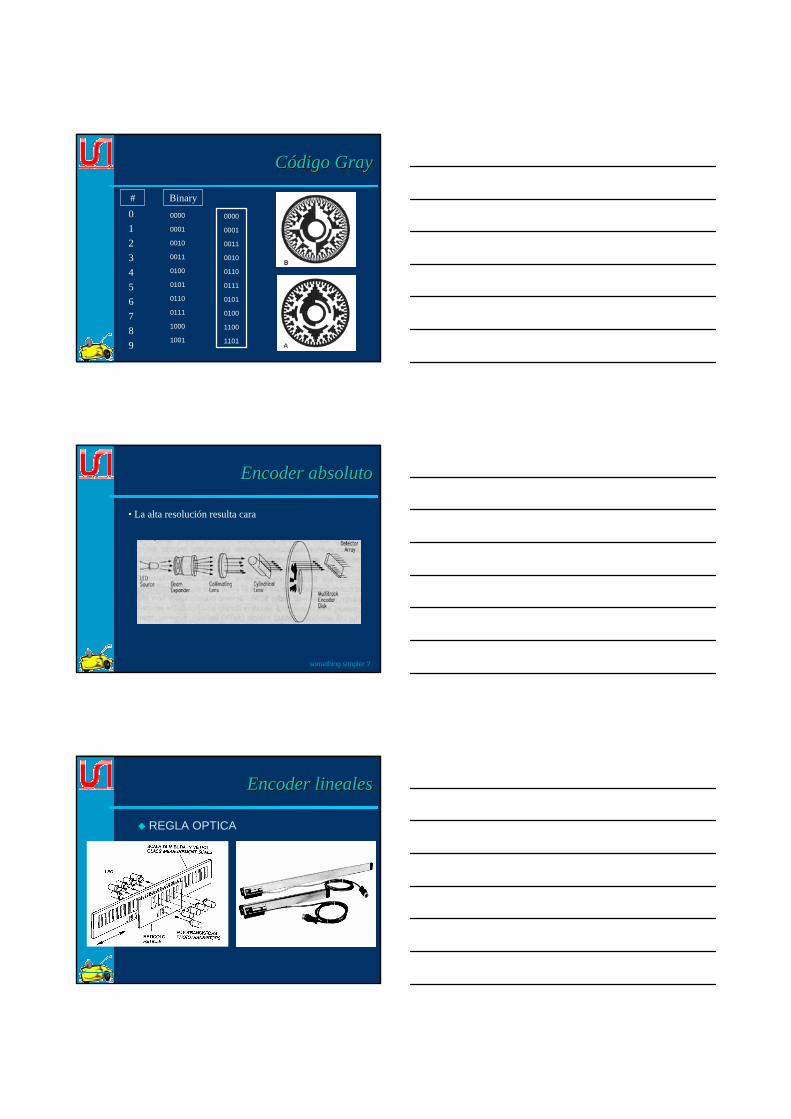
Circuito
decodificador
• Posición relativa
¿ calibracion ?
¿ direccion ?
¿ resolucion ?
rejilla
emisor
Encoder relativoEncoderEncoder relativorelativo
sensor
A
B
Encoder relativoEncoderEncoder relativorelativo
Encoder relativoEncoderEncoder relativorelativo
Encoder absolutoEncoderEncoder absolutoabsoluto
Encoder absolutoEncoderEncoder absolutoabsoluto
Encoder absolutoEncoderEncoder absolutoabsoluto
0123456789
# Binary0000
0001
0010
0011
0100
0101
0110
0111
1000
1001
0000
0001
0011
0010
0110
0111
0101
0100
1100
1101
Código GrayCódigo Código GrayGray
• La alta resolución resulta cara
something simpler ?
Encoder absolutoEncoderEncoder absolutoabsoluto
Encoder linealesEncoderEncoder linealeslineales
REGLA OPTICA
RESOLVERRESOLVER
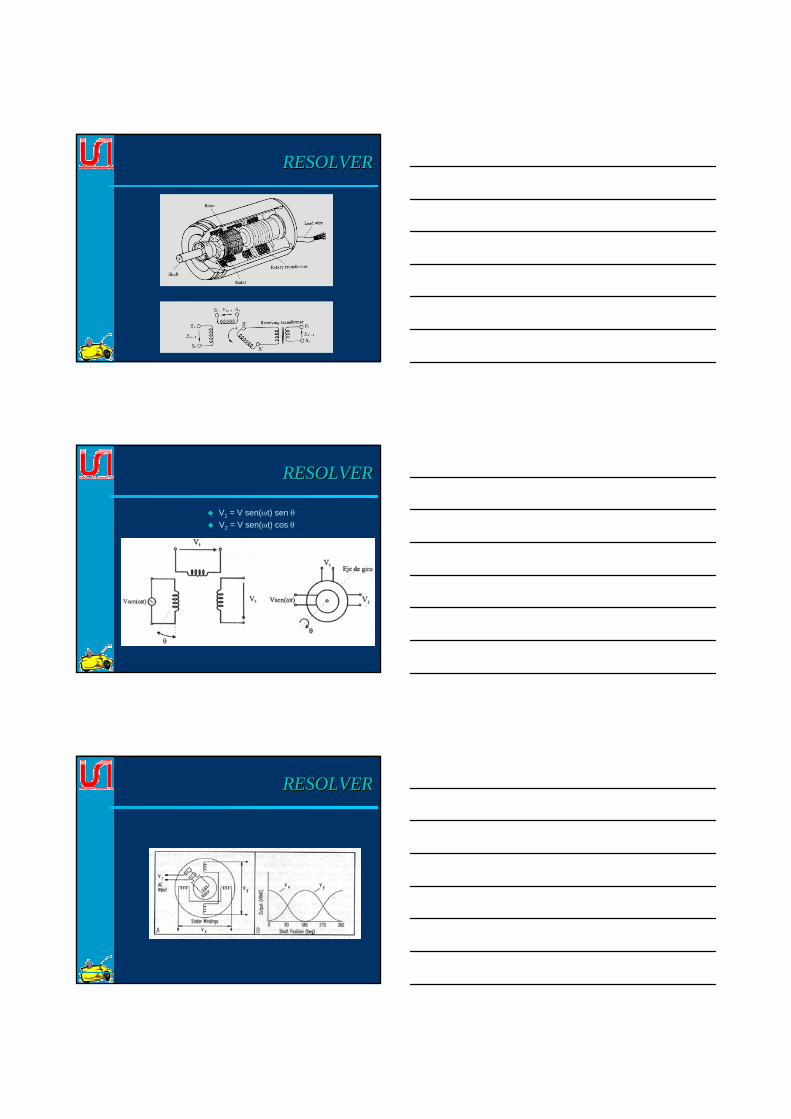
RESOLVERRESOLVERRESOLVER
V1 = V sen(ωt) sen θV2 = V sen(ωt) cos θ
RESOLVERRESOLVERRESOLVER
RESOLVERRESOLVERRESOLVER
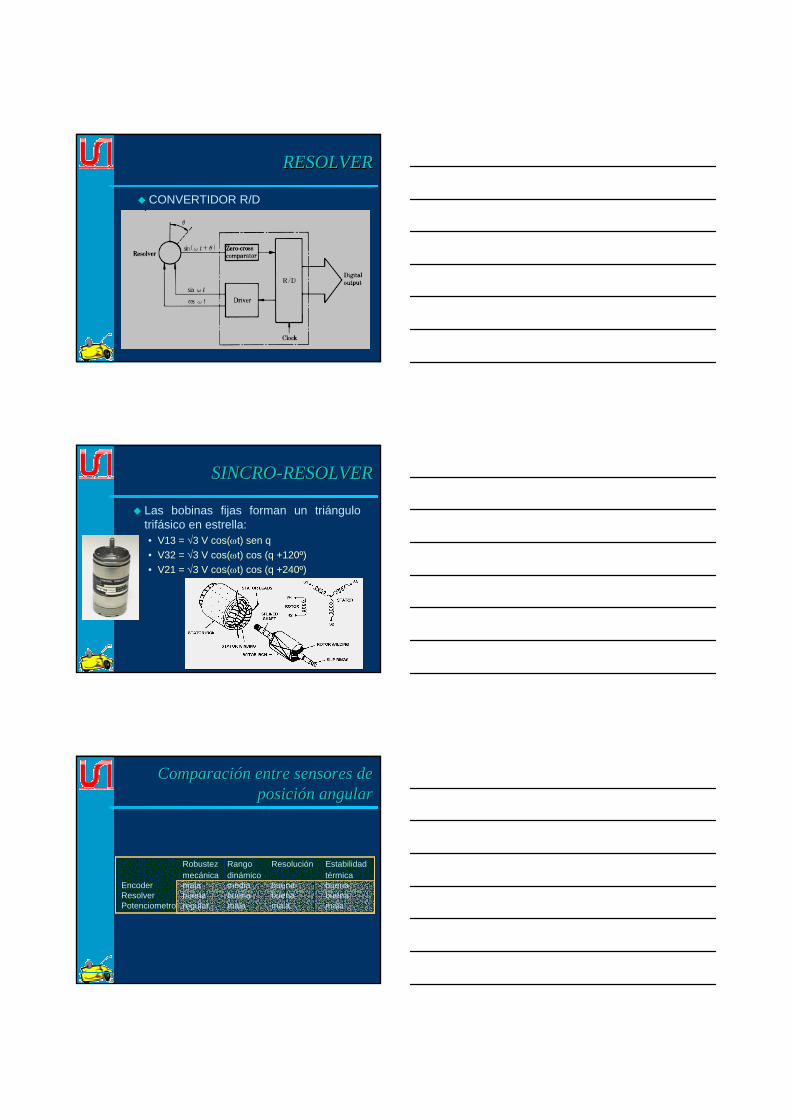
CONVERTIDOR R/D
SINCRO-RESOLVERSINCROSINCRO--RESOLVERRESOLVER
Las bobinas fijas forman un triángulo trifásico en estrella:• V13 = √3 V cos(ωt) sen q• V32 = √3 V cos(ωt) cos (q +120º)• V21 = √3 V cos(ωt) cos (q +240º)
Comparación entre sensores de Comparación entre sensores de posición angularposición angular
Robustez Rango Resolución Estabilidadmecánica dinámico térmica
Encoder mala media buena buenaResolver buena buena buena buenaPotenciometro regular mala mala mala
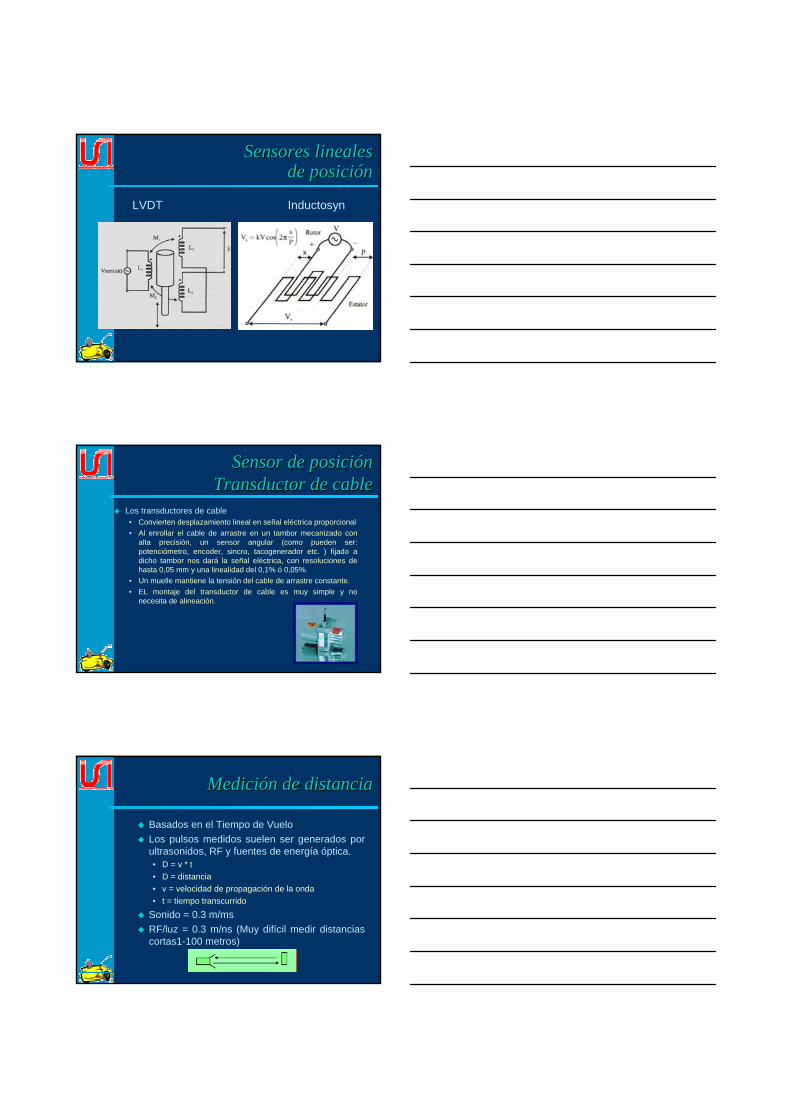
Sensores linealesde posición
Sensores linealesSensores linealesde posiciónde posición
LVDT Inductosyn
Sensor de posiciónTransductor de cable
SensorSensor de posiciónde posiciónTransductor de cableTransductor de cable
Los transductores de cable• Convierten desplazamiento lineal en señal eléctrica proporcional• Al enrollar el cable de arrastre en un tambor mecanizado con
alta precisión, un sensor angular (como pueden ser: potenciómetro, encoder, sincro, tacogenerador etc. ) fijado a dicho tambor nos dará la señal eléctrica, con resoluciones de hasta 0,05 mm y una linealidad del 0,1% ó 0,05%.
• Un muelle mantiene la tensión del cable de arrastre constante. • EL montaje del transductor de cable es muy simple y no
necesita de alineación.
Medición de distancia Medición de distancia Medición de distancia
Basados en el Tiempo de VueloLos pulsos medidos suelen ser generados por ultrasonidos, RF y fuentes de energía óptica.• D = v * t• D = distancia• v = velocidad de propagación de la onda• t = tiempo transcurrido
Sonido = 0.3 m/msRF/luz = 0.3 m/ns (Muy difícil medir distancias cortas1-100 metros)
Sensores Basados en SonidoSensoresSensores Basados en SonidoBasados en Sonido
SONAR: Sound Navigation and Ranging
• El sonido rebota en los objetos• La medida del tiempo de reflexión mide la
distancia• La medida del cambio de frecuencia – da la
velocidad relativa del objeto (efecto Doppler)• Murciélagos y delfines lo utilizan con
excelentes resultados• Los robots los usan con peores resultados
Sensores de proximidad/distancia.Sonar
SensoresSensores de proximidad/distancia.de proximidad/distancia.SonarSonar
Telémetros de ultrasonidos (sonar)
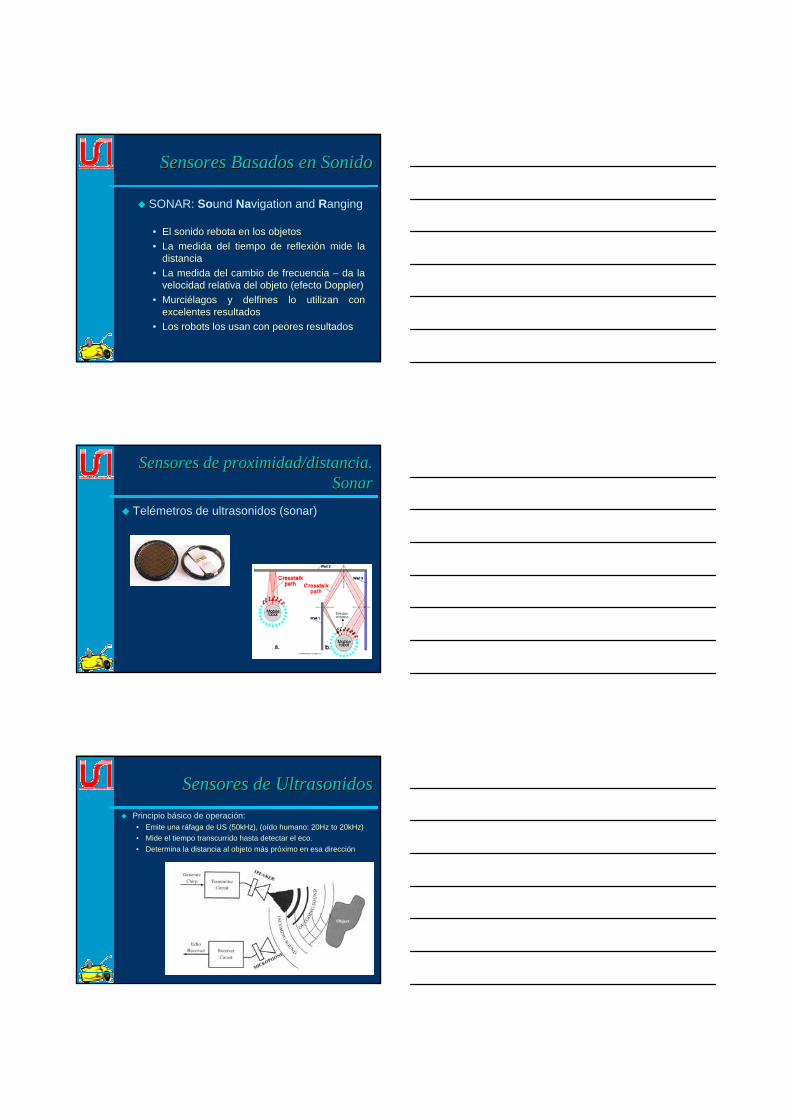
Sensores de UltrasonidosSensoresSensores de de UltrasonidosUltrasonidosPrincipio básico de operación:• Emite una ráfaga de US (50kHz), (oído humano: 20Hz to 20kHz) • Mide el tiempo transcurrido hasta detectar el eco.• Determina la distancia al objeto más próximo en esa dirección
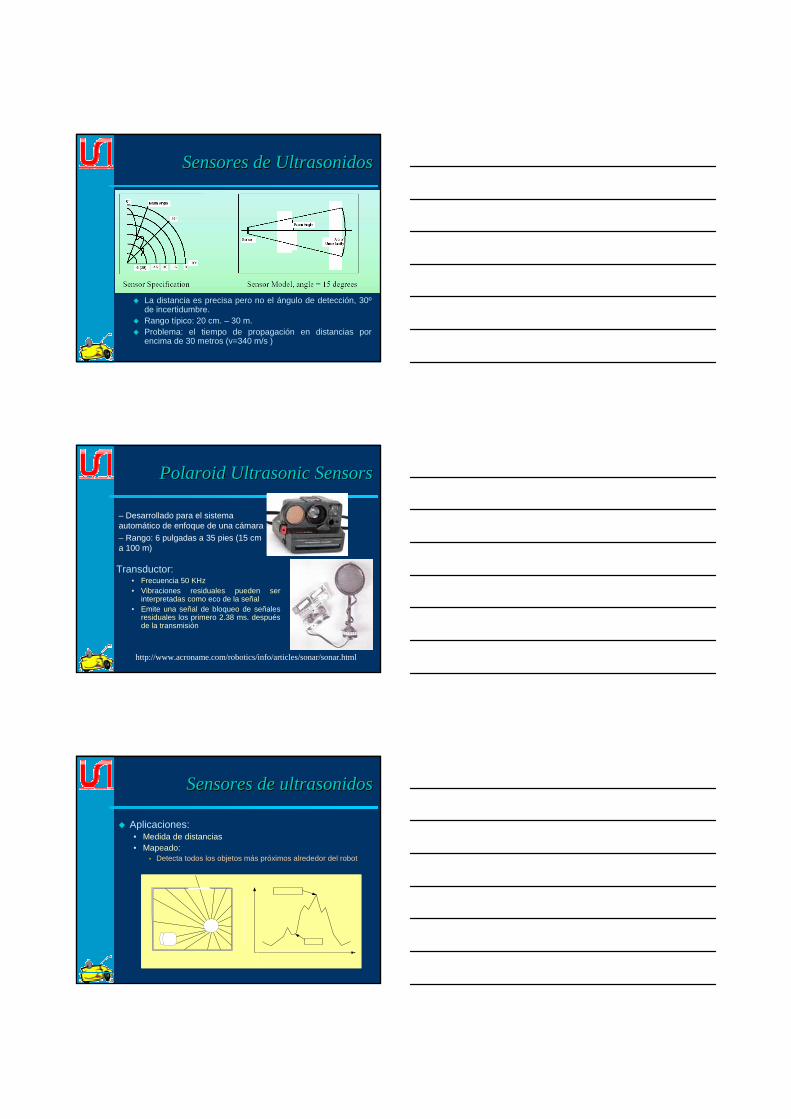
Sensores de UltrasonidosSensoresSensores de de UltrasonidosUltrasonidos
La distancia es precisa pero no el ángulo de detección, 30º de incertidumbre.Rango típico: 20 cm. – 30 m.Problema: el tiempo de propagación en distancias por encima de 30 metros (v=340 m/s )
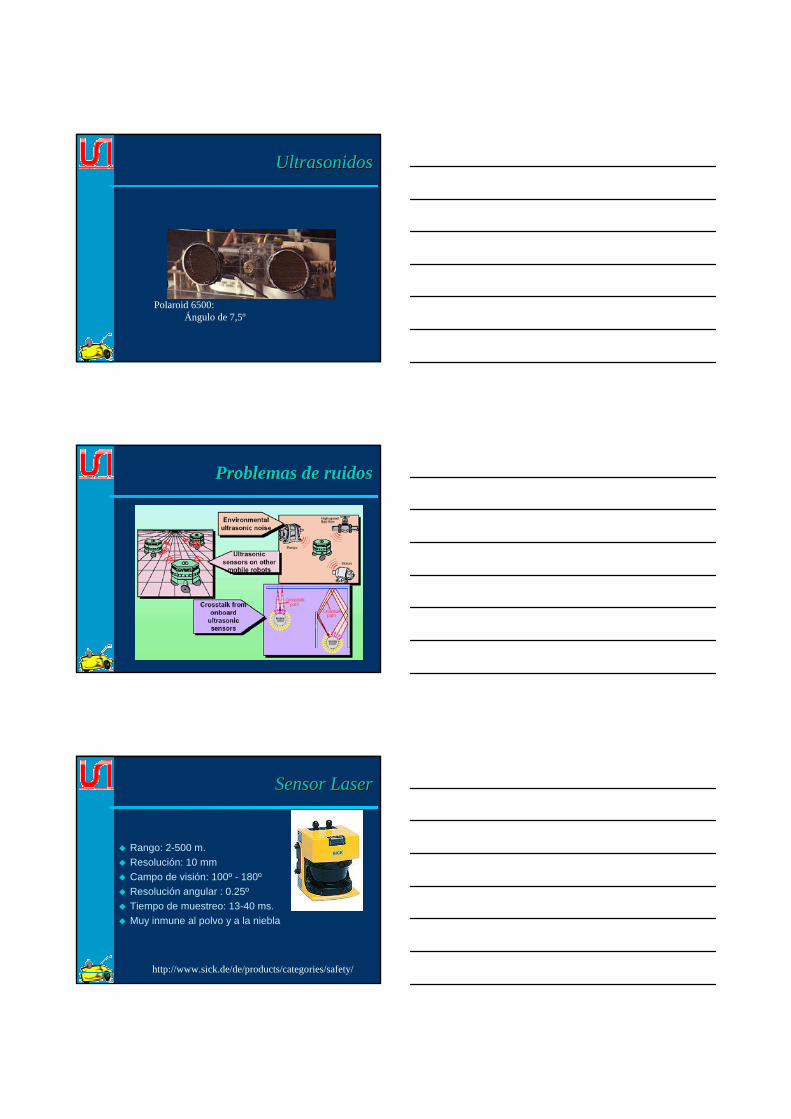
Polaroid Ultrasonic SensorsPolaroid Ultrasonic SensorsPolaroid Ultrasonic Sensors
Transductor:• Frecuencia 50 KHz• Vibraciones residuales pueden ser
interpretadas como eco de la señal• Emite una señal de bloqueo de señales
residuales los primero 2.38 ms. después de la transmisión
http://www.acroname.com/robotics/info/articles/sonar/sonar.html
– Desarrollado para el sistema automático de enfoque de una cámara– Rango: 6 pulgadas a 35 pies (15 cma 100 m)
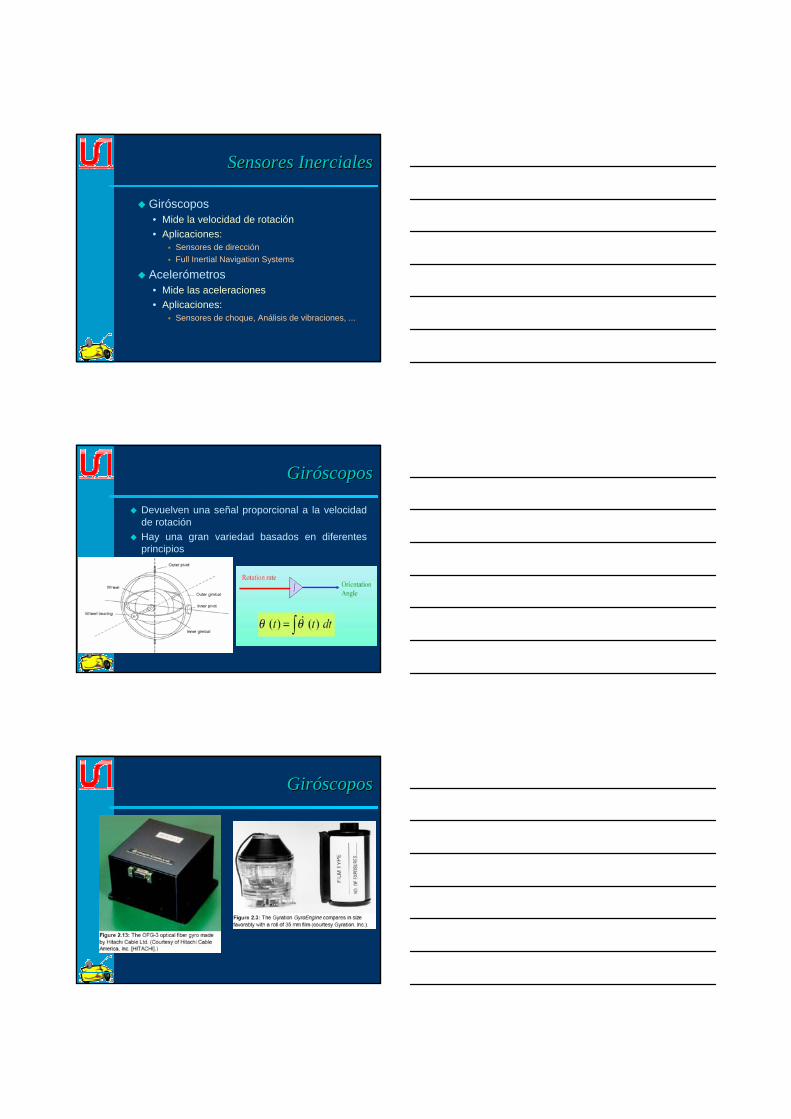
Sensores de ultrasonidosSensoresSensores de de ultrasonidosultrasonidos
Aplicaciones:• Medida de distancias• Mapeado:
Detecta todos los objetos más próximos alrededor del robot
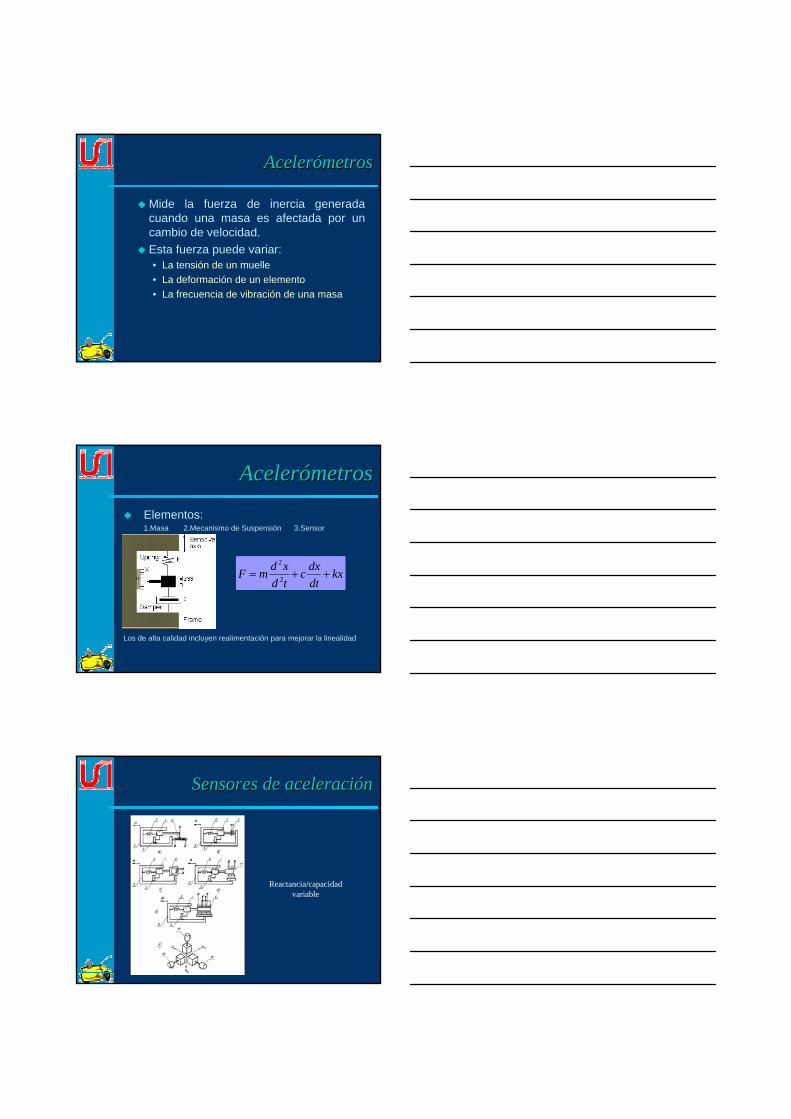
UltrasonidosUltrasonidosUltrasonidos
Polaroid 6500:Ángulo de 7,5º
Problemas de ruidosProblemas de ruidosProblemas de ruidos
Sensor LaserSensor LaserSensor Laser
Rango: 2-500 m.Resolución: 10 mmCampo de visión: 100º - 180ºResolución angular : 0.25ºTiempo de muestreo: 13-40 ms.Muy inmune al polvo y a la niebla
http://www.sick.de/de/products/categories/safety/
Sensores InercialesSensoresSensores InercialesInerciales
Giróscopos • Mide la velocidad de rotación• Aplicaciones:
Sensores de direcciónFull Inertial Navigation Systems
Acelerómetros • Mide las aceleraciones • Aplicaciones:
Sensores de choque, Análisis de vibraciones, ...
Giróscopos Giróscopos Giróscopos
Devuelven una señal proporcional a la velocidad de rotaciónHay una gran variedad basados en diferentes principios
Giróscopos Giróscopos Giróscopos
Acelerómetros Acelerómetros Acelerómetros
Mide la fuerza de inercia generada cuando una masa es afectada por un cambio de velocidad. Esta fuerza puede variar:• La tensión de un muelle • La deformación de un elemento• La frecuencia de vibración de una masa
AcelerómetrosAcelerómetrosAcelerómetros
Elementos: 1.Masa 2.Mecanismo de Suspensión 3.Sensor
Los de alta calidad incluyen realimentación para mejorar la linealidad
kxdtdxc
tdxdmF ++= 2
2
Sensores de aceleraciónSensoresSensores de aceleraciónde aceleración
Reactancia/capacidadvariable
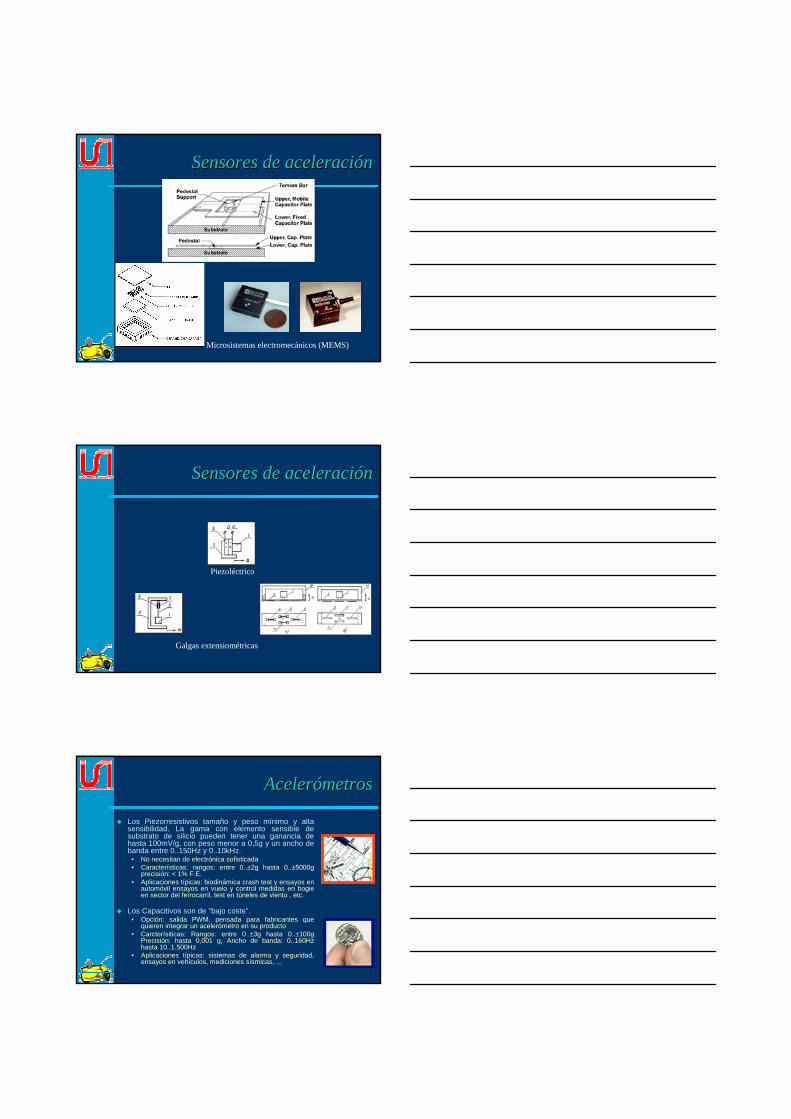
Sensores de aceleración SensoresSensores de aceleración de aceleración
Microsistemas electromecánicos (MEMS)
Sensores de aceleración SensoresSensores de aceleración de aceleración
Galgas extensiométricas
Piezoléctrico
AcelerómetrosAcelerómetrosAcelerómetros
Los Piezorresistivos tamaño y peso mínimo y alta sensibilidad. La gama con elemento sensible de substrato de silicio pueden tener una ganancia de hasta 100mV/g, con peso menor a 0,5g y un ancho de banda entre 0..150Hz y 0..10kHz.
• No necesitan de electrónica sofisticada• Características: rangos: entre 0..±2g hasta 0..±5000g
precisión: < 1% F.E. • Aplicaciones típicas: biodinámica crash test y ensayos en
automóvil ensayos en vuelo y control medidas en bogieen sector del ferrocarril, test en túneles de viento , etc.
Los Capacitivos son de "bajo coste". • Opción: salida PWM, pensada para fabricantes que
quieren integrar un acelerómetro en su producto• Carcterísiticas: Rangos: entre 0..±3g hasta 0..±100g
Precisión: hasta 0,001 g, Ancho de banda: 0..160Hz hasta 10..1.500Hz
• Aplicaciones típicas: sistemas de alarma y seguridad, ensayos en vehículos, mediciones sísmicas, ...
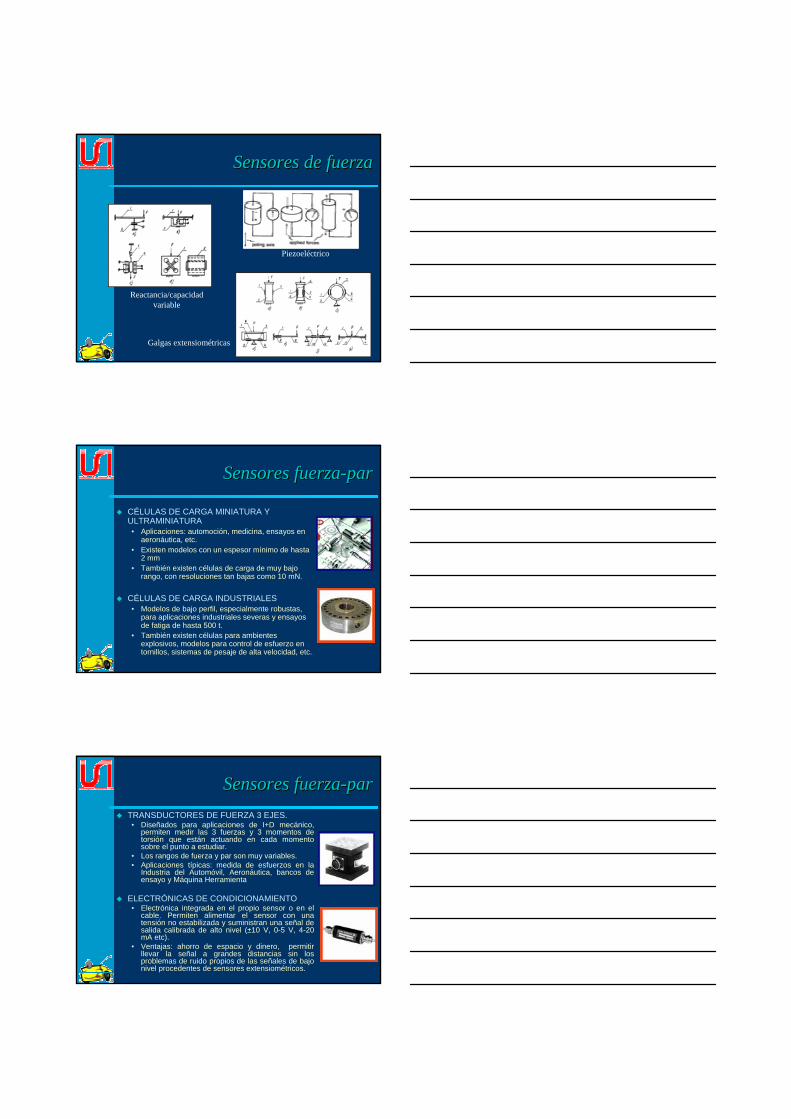
Sensores de fuerza SensoresSensores de fuerza de fuerza
Reactancia/capacidadvariable
Galgas extensiométricas
Piezoeléctrico
Sensores fuerza-parSensoresSensores fuerzafuerza--parpar
CÉLULAS DE CARGA MINIATURA Y ULTRAMINIATURA • Aplicaciones: automoción, medicina, ensayos en
aeronáutica, etc.• Existen modelos con un espesor mínimo de hasta
2 mm• También existen células de carga de muy bajo
rango, con resoluciones tan bajas como 10 mN.
CÉLULAS DE CARGA INDUSTRIALES• Modelos de bajo perfil, especialmente robustas,
para aplicaciones industriales severas y ensayos de fatiga de hasta 500 t.
• También existen células para ambientes explosivos, modelos para control de esfuerzo en tornillos, sistemas de pesaje de alta velocidad, etc.
Sensores fuerza-parSensoresSensores fuerzafuerza--parparTRANSDUCTORES DE FUERZA 3 EJES.• Diseñados para aplicaciones de I+D mecánico,
permiten medir las 3 fuerzas y 3 momentos de torsión que están actuando en cada momento sobre el punto a estudiar.
• Los rangos de fuerza y par son muy variables. • Aplicaciones típicas: medida de esfuerzos en la
Industria del Automóvil, Aeronáutica, bancos de ensayo y Máquina Herramienta
ELECTRÓNICAS DE CONDICIONAMIENTO• Electrónica integrada en el propio sensor o en el
cable. Permiten alimentar el sensor con una tensión no estabilizada y suministran una señal de salida calibrada de alto nivel (±10 V, 0-5 V, 4-20 mA etc).
• Ventajas: ahorro de espacio y dinero, permitir llevar la señal a grandes distancias sin los problemas de ruido propios de las señales de bajo nivel procedentes de sensores extensiométricos.
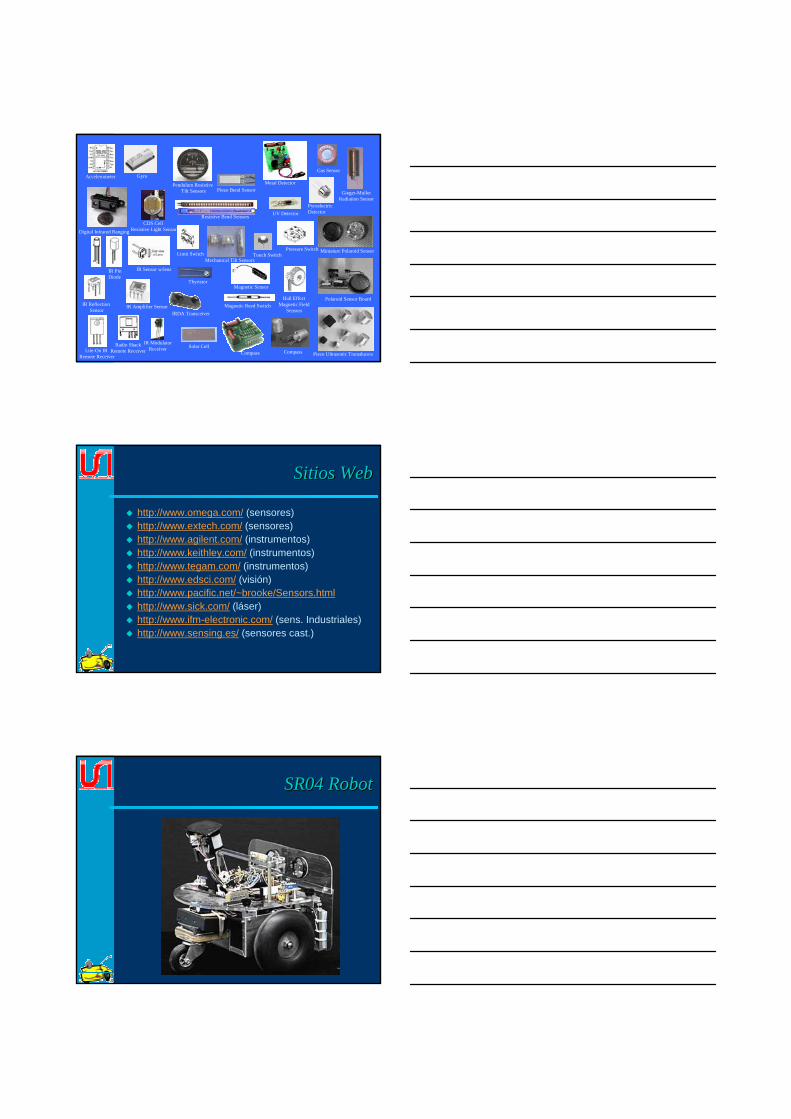
Solar Cell
Digital Infrared Ranging
Compass
Touch SwitchPressure Switch
Limit Switch
Magnetic Reed Switch
Magnetic Sensor
Miniature Polaroid Sensor
Polaroid Sensor Board
Piezo Ultrasonic Transducers
Pyroelectric Detector
Thyristor
Gas Sensor
Gieger-MullerRadiation Sensor
Piezo Bend Sensor
Resistive Bend Sensors
Mechanical Tilt Sensors
Pendulum Resistive Tilt Sensors
CDS Cell Resistive Light Sensor
Hall EffectMagnetic Field
Sensors
Compass
IRDA TransceiverIR Amplifier Sensor
IR ModulatorReceiverLite-On IR
Remote Receiver
Radio ShackRemote Receiver
IR Sensor w/lens
GyroAccelerometer
IR ReflectionSensor
IR Pin Diode
UV Detector
Metal Detector
Sitios WebSitiosSitios WebWeb
http://www.omega.com/ (sensores)http://www.extech.com/ (sensores)http://www.agilent.com/ (instrumentos)http://www.keithley.com/ (instrumentos)http://www.tegam.com/ (instrumentos)http://www.edsci.com/ (visión)http://www.pacific.net/~brooke/Sensors.htmlhttp://www.sick.com/ (láser)http://www.ifm-electronic.com/ (sens. Industriales)http://www.sensing.es/ (sensores cast.)
SR04 RobotSR04 RobotSR04 Robot
ConclusionesConclusionesConclusiones
Hay ruido en las medidas de los sensoresOrigen: fenómenos naturales + ingenieríano idealConsecuencias: precisión limitadaFiltrado: • software: promediando, algoritmos de
procesamiento de señal• hardware “tricky”: condensadores
Competiciones de Micro-RobotsCompeticiones de MicroCompeticiones de Micro--RobotsRobots
SumoRastreadoresVelocidadLaberintoBomberosFútbolPrueba libre
¿Qué percepción necesitan?
ReferenciasReferenciasReferencias
Sensors for mobile robots: theory and applications, H. R. Everett, A. K. Peters Ltd, C1995, ISBN: 1-56881-048-2
Handbook of Modern Sensors: Physics, Designs and Applications, 2nd edition,Jacob Fraden, AIP Press/Springer, 1996.ISBN 1-56396-538-0.
Gracias por su atenciónGracias por su atenciónGracias por su atención





























