Embed Size (px)
Citation preview
SIMOTION
SIMOTION SCOUT Comunicazione
Manuale di sistema
11/2010
Prefazione
Premessa 1
Panoramica delle funzioni e dei servizi di comunicazione
2
PROFIBUS 3
PROFINET IO 4
Informazioni generali su Ethernet (collegamenti TCP e UDP)
5
Routing - Comunicazione oltre i limiti della rete
6
SIMOTION IT 7
PROFIsafe 8
PROFIdrive 9
Appendice 10
Avvertenze di legge Concetto di segnaletica di avvertimento
Questo manuale contiene delle norme di sicurezza che devono essere rispettate per salvaguardare l'incolumità personale e per evitare danni materiali. Le indicazioni da rispettare per garantire la sicurezza personale sono evidenziate da un simbolo a forma di triangolo mentre quelle per evitare danni materiali non sono precedute dal triangolo. Gli avvisi di pericolo sono rappresentati come segue e segnalano in ordine descrescente i diversi livelli di rischio.
PERICOLO questo simbolo indica che la mancata osservanza delle opportune misure di sicurezza provoca la morte o gravi lesioni fisiche.
AVVERTENZA il simbolo indica che la mancata osservanza delle relative misure di sicurezza può causare la morte o gravi lesioni fisiche.
CAUTELA con il triangolo di pericolo indica che la mancata osservanza delle relative misure di sicurezza può causare lesioni fisiche non gravi.
CAUTELA senza triangolo di pericolo indica che la mancata osservanza delle relative misure di sicurezza può causare danni materiali.
ATTENZIONE indica che, se non vengono rispettate le relative misure di sicurezza, possono subentrare condizioni o conseguenze indesiderate.
Nel caso in cui ci siano più livelli di rischio l'avviso di pericolo segnala sempre quello più elevato. Se in un avviso di pericolo si richiama l'attenzione con il triangolo sul rischio di lesioni alle persone, può anche essere contemporaneamente segnalato il rischio di possibili danni materiali.
Personale qualificato Il prodotto/sistema oggetto di questa documentazione può essere adoperato solo da personale qualificato per il rispettivo compito assegnato nel rispetto della documentazione relativa al compito, specialmente delle avvertenze di sicurezza e delle precauzioni in essa contenute. Il personale qualificato, in virtù della sua formazione ed esperienza, è in grado di riconoscere i rischi legati all'impiego di questi prodotti/sistemi e di evitare possibili pericoli.
Uso conforme alle prescrizioni di prodotti Siemens Si prega di tener presente quanto segue:
AVVERTENZA I prodotti Siemens devono essere utilizzati solo per i casi d’impiego previsti nel catalogo e nella rispettiva documentazione tecnica. Qualora vengano impiegati prodotti o componenti di terzi, questi devono essere consigliati oppure approvati da Siemens. Il funzionamento corretto e sicuro dei prodotti presuppone un trasporto, un magazzinaggio, un’installazione, un montaggio, una messa in servizio, un utilizzo e una manutenzione appropriati e a regola d’arte. Devono essere rispettate le condizioni ambientali consentite. Devono essere osservate le avvertenze contenute nella rispettiva documentazione.
Marchio di prodotto Tutti i nomi di prodotto contrassegnati con ® sono marchi registrati della Siemens AG. Gli altri nomi di prodotto citati in questo manuale possono essere dei marchi il cui utilizzo da parte di terzi per i propri scopi può violare i diritti dei proprietari.
Esclusione di responsabilità Abbiamo controllato che il contenuto di questa documentazione corrisponda all'hardware e al software descritti. Non potendo comunque escludere eventuali differenze, non possiamo garantire una concordanza perfetta. Il contenuto di questa documentazione viene tuttavia verificato periodicamente e le eventuali correzioni o modifiche vengono inserite nelle successive edizioni.
Siemens AG Industry Sector Postfach 48 48 90026 NÜRNBERG GERMANIA
Copyright © Siemens AG 2010. Con riserva di eventuali modifiche tecniche
Comunicazione Manuale di sistema, 11/2010 3
Prefazione
Prefazione
Indice La presente documentazione è parte integrante del Pacchetto di documentazione delle descrizioni del sistema e delle funzioni.
Campo di validità Questo manuale è valido per SIMOTION SCOUT versione V4.2:
● SIMOTION SCOUT V4.2 (sistema di engineering della famiglia di prodotti SIMOTION),
Sezioni del manuale Il presente manuale descrive le possibilità di comunicazione dei sistemi SIMOTION.
● Panoramica delle funzioni e dei servizi di comunicazione
Informazioni generali sulle possibilità di comunicazione di SIMOTION.
● PROFIBUS
Informazioni sulla comunicazione DPV1 e sulla configurazione e programmazione della comunicazione tra apparecchi SIMOTION e SIMATIC.
● PROFINET IO
Informazioni sulla progettazione di PROFINET con SIMOTION
● Informazioni generali su Ethernet (collegamenti TCP/IP e UDP)
Informazioni sulla configurazione e programmazione della comunicazione Ethernet tra apparecchi SIMOTION e SIMATIC.
● Routing - Comunicazione oltre i limiti della rete
Informazioni generali sul routing
● SIMOTION IT
Informazioni generali sulle funzioni IT e web messe a disposizione da SIMOTION
● PROFIsafe
Informazioni generali sulla progettazione di controllori fail-safe.
● PROFIdrive
Descrizione del profilo PROFIdrive.
● Indice
Indice analitico per il reperimento delle informazioni
Prefazione
Comunicazione 4 Manuale di sistema, 11/2010
Documentazione SIMOTION La panoramica della documentazione SIMOTION è riportata in una bibliografia separata.
La documentazione è compresa in versione elettronica nella fornitura di SIMOTION SCOUT e consiste in 10 pacchetti di documenti.
Per la versione di prodotto SIMOTION V4.2 sono disponibili i seguenti pacchetti di documentazione:
● SIMOTION Engineering System Utilizzo
● SIMOTION Descrizione del sistema e delle funzioni
● SIMOTION Service e Diagnostica
● SIMOTION IT
● Programmazione SIMOTION
● Programmazione SIMOTION - Riferimenti
● SIMOTION C
● SIMOTION P
● SIMOTION D
● Documentazione integrativa SIMOTION
Hotline e indirizzi internet
Ulteriori informazioni Al seguente link sono disponibili informazioni relative:
● all'ordinazione della documentazione / alla panoramica manuali
● altri link per il download di documenti
● all'utilizzo della documentazione online (manuali/cercare e sfogliare informazioni)
http://www.siemens.com/motioncontrol/docu
Per domande relative alla documentazione tecnica (ad es. suggerimenti, correzioni) si prega di inviare una e-mail al seguente indirizzo: [email protected]
My Documentation Manager Al seguente link sono disponibili informazioni per strutturare individualmente la documentazione sulla base di contenuti Siemens ed adattarli alla propria documentazione della macchina:
http://www.siemens.com/mdm
Prefazione
Comunicazione Manuale di sistema, 11/2010 5
Training Al seguente link sono disponibili informazioni su SITRAIN - il Training di Siemens per prodotti, sistemi e soluzioni della tecnica di automazione:
http://www.siemens.com/sitrain
Domande frequenti Le domande frequenti sono disponibili nelle pagine di assistenza&supporto in Supporto prodotto:
http://support.automation.siemens.com
Technical Support Per i numeri telefonici dell'assistenza tecnica specifica dei vari Paesi, vedere in Internet in Contatto:
http://www.siemens.com/automation/service&support

Prefazione
Comunicazione 6 Manuale di sistema, 11/2010
Comunicazione Manuale di sistema, 11/2010 7
Indice del contenuto
Prefazione ................................................................................................................................................. 3
1 Premessa ................................................................................................................................................ 13
1.1 Argomento comunicazione nella documentazione SIMOTION ...................................................13
2 Panoramica delle funzioni e dei servizi di comunicazione........................................................................ 15
2.1 Possibilità della rete .....................................................................................................................15 2.1.1 Premessa.....................................................................................................................................15 2.1.2 PROFINET...................................................................................................................................15 2.1.3 Industrial Ethernet........................................................................................................................16 2.1.4 PROFIBUS...................................................................................................................................16 2.1.5 MPI (interfaccia multipunto) .........................................................................................................17 2.1.6 Comunicazione punto a punto (PtP)............................................................................................17
2.2 Servizi di comunicazione (o funzioni di rete) ...............................................................................18 2.2.1 Premessa.....................................................................................................................................18 2.2.2 Servizi di comunicazione PG/OP.................................................................................................19 2.2.3 Servizi di comunicazione S7 ........................................................................................................19 2.2.4 Servizi di comunicazione di base S7 ...........................................................................................20 2.2.5 Servizio di comunicazione "dati globali" ......................................................................................20 2.2.6 Servizi di comunicazione PROFINET ..........................................................................................21 2.2.7 Servizi di comunicazione Industrial Ethernet ...............................................................................21 2.2.8 Servizi di comunicazione PROFIBUS..........................................................................................22
2.3 Ulteriori procedure per lo scambio di informazioni.......................................................................23
3 PROFIBUS .............................................................................................................................................. 25
3.1 Comunicazione PROFIBUS.........................................................................................................25 3.1.1 Comunicazione PROFIBUS (panoramica) ..................................................................................25
3.2 Comunicazione con SIMATIC S7 ................................................................................................25 3.2.1 Possibili connessioni tra SIMOTION e SIMATIC.........................................................................25 3.2.2 SIMOTION come slave DP in un SIMATIC S7 ............................................................................26 3.2.2.1 Premessa.....................................................................................................................................26 3.2.2.2 Accoppiamento di SIMOTION come slave DP a un SIMATIC S7 con l'ausilio di un file
GSD .............................................................................................................................................27 3.2.2.3 Accoppiamento di SIMOTION come I-Slave a SIMATIC S7 .......................................................28 3.2.3 SIMATIC S7 come slave DP in un SIMOTION............................................................................30 3.2.3.1 Premessa.....................................................................................................................................30 3.2.3.2 Accoppiamento di SIMATIC come slave DP a un apparecchio SIMOTION con l'ausilio di
un file GSD...................................................................................................................................31 3.2.3.3 Accoppiamento della CPU SIMATIC S7 come I-Slave a un apparecchio SIMOTION................31 3.2.4 Collegamento master-master PROFIBUS tra SIMATIC e SIMOTION ........................................34 3.2.4.1 Premessa.....................................................................................................................................34 3.2.4.2 Funzioni di sistema SIMATIC S7 per un collegamento PROFIBUS............................................34
4 PROFINET IO.......................................................................................................................................... 39
4.1 Panoramica di PROFINET IO......................................................................................................39
Indice del contenuto
Comunicazione 8 Manuale di sistema, 11/2010
4.1.1 PROFINET IO ............................................................................................................................. 39 4.1.2 Modello di applicazione............................................................................................................... 39 4.1.3 Controller IO................................................................................................................................ 40 4.1.4 IO Device..................................................................................................................................... 40 4.1.5 Sistema PROFINET IO ............................................................................................................... 41 4.1.6 I-Device ....................................................................................................................................... 41 4.1.7 Classi RT..................................................................................................................................... 41 4.1.7.1 Classi RT con PROFINET IO...................................................................................................... 41 4.1.7.2 Clock di invio e tempo di aggiornamento .................................................................................... 43 4.1.7.3 Clock di invio e tempi di aggiornamento impostabili ................................................................... 44 4.1.7.4 Impostazione delle classi RT ...................................................................................................... 46 4.1.7.5 PROFINET IO con RT................................................................................................................. 47 4.1.7.6 PROFINET IO con IRT - Panoramica ......................................................................................... 47 4.1.7.7 PROFINET IO con IRT (Elevata Performance) .......................................................................... 48 4.1.8 Dominio Sync .............................................................................................................................. 50 4.1.9 Equidistanza e sincronismo clock in PROFINET........................................................................ 50 4.1.10 Indirizzamento di apparecchi PROFINET IO .............................................................................. 51 4.1.11 Pianificazione e topologia per una rete PROFINET ................................................................... 52 4.1.12 Applicazioni a sincronismo di clock in PROFINET ..................................................................... 57 4.1.13 Comunicazione aciclica tramite PROFINET ............................................................................... 59
4.2 Proprietà di PROFINET IO con SIMOTION................................................................................ 60 4.2.1 Premessa .................................................................................................................................... 60 4.2.2 Rapporto di clock ........................................................................................................................ 62 4.2.2.1 Rapporto di clock con PROFINET IO negli apparecchi SIMOTION ........................................... 62 4.2.2.2 Rapporto di riduzione clock per accessi alla periferia................................................................. 64 4.2.2.3 Clok bus impostabili nel rapporto di clock sugli apparecchi SIMOTION..................................... 65 4.2.3 Sistema di task e rapporto temporale ......................................................................................... 66 4.2.3.1 Panoramica del sistema di task e dei clock di sistema in SIMOTION ........................................ 66 4.2.3.2 BackgroundTask, MotionTask e IPOsynchronousTask.............................................................. 67 4.2.3.3 ServoSynchronousTask .............................................................................................................. 69 4.2.3.4 Elaborazione I/O veloce in ServoSynchronousTask................................................................... 71 4.2.4 Correlazione dominio Sync e sistemi IO ..................................................................................... 71 4.2.5 Master Sync ridondante .............................................................................................................. 72 4.2.6 Capacità ...................................................................................................................................... 73
4.3 Progettazione di PROFINET IO con SIMOTION ........................................................................ 75 4.3.1 Novità a partire da SIMOTION SCOUT V4.2.............................................................................. 75 4.3.2 Procedimento per la progettazione di PROFINET IO con IRT Elevata Performance................. 76 4.3.3 Inserimento e progettazione di SIMOTION D ............................................................................. 76 4.3.3.1 Inserimento e progettazione generale di SIMOTION D .............................................................. 76 4.3.3.2 Inserimento e progettazione di SIMOTION D4x5-2/D410 PN .................................................... 77 4.3.3.3 Inserimento e progettazione di SIMOTION D4x5 incl. CBE30 ................................................... 80 4.3.3.4 Inserimento e progettazione della scheda PROFINET CBE30 .................................................. 82 4.3.4 Inserimento e progettazione di SIMOTION P ............................................................................. 84 4.3.5 Inserimento e progettazione di SIMOTION C ............................................................................. 87 4.3.6 Creazione dominio Sync ............................................................................................................. 89 4.3.7 Definizione di clock di invio e tempi di aggiornamento ............................................................... 91 4.3.8 Servo_fast, riduzione di clock per il Servo nell'interfaccia PROFINET ....................................... 94 4.3.9 Progettazione topologia .............................................................................................................. 96 4.3.9.1 Topologia..................................................................................................................................... 96 4.3.9.2 Editor topologia (visualizzazione grafica).................................................................................... 97 4.3.9.3 Interconnessione delle porte tramite l'editor topologia (visualizzazione tabellare)................... 100
Indice del contenuto
Comunicazione Manuale di sistema, 11/2010 9
4.3.10 Creazione IO-Device..................................................................................................................101 4.3.11 Inserimento e progettazione di SINAMICS S120.......................................................................102 4.3.12 Indirizzo IP e nome di comunicazione .......................................................................................106 4.3.13 Assegnazione di nomi apparecchio e indirizzi IP per IO-Device ...............................................108 4.3.14 Indirizzo IP e nomi di comunicazione per AWP/DCP (Mini-IP-Config) ......................................112
4.4 Progettazione dello scambio diretto di dati tra IO-Controller .....................................................115 4.4.1 Premessa...................................................................................................................................115 4.4.2 Progettazione trasmettitore........................................................................................................117 4.4.3 Progettazione ricevitore .............................................................................................................118
4.5 Progettazione degli I-Device......................................................................................................119 4.5.1 PROFINET IO e I-Device...........................................................................................................119 4.5.2 Funzionalità I-Device a partire da SIMOTION SCOUT V4.2 .....................................................124 4.5.3 Creazione I-Device ....................................................................................................................126 4.5.4 Esportazione del file GSD per I-Device .....................................................................................128 4.5.5 Come creare un agente proxy I-Device .....................................................................................128 4.5.6 Inserimento dell'agente proxy I-Device nell'IO-Controller sovraordinato...................................131 4.5.7 Come cancellare un agente proxy I-Device...............................................................................134
4.6 Caricamento progettazione della comunicazione......................................................................134 4.6.1 Caricamento progettazione PROFINET IO................................................................................134
4.7 Scambio dei dati tra SIMATIC e SIMOTION tramite PROFINET ..............................................135 4.7.1 Scambio dei dati tramite l'uso di I-Device ..................................................................................135 4.7.2 PN-PN-Coupler ..........................................................................................................................136 4.7.3 Comunicazione tramite protocolli standard................................................................................137
4.8 Diagnostica e comportamento degli allarmi...............................................................................138 4.8.1 Sistemi di allarme e di diagnostica PROFINET IO in SIMOTION..............................................138 4.8.2 Modello di diagnostica ...............................................................................................................138 4.8.3 Allarmi nel controller IO..............................................................................................................140 4.8.4 Allarmi trasmessi da IO-Device al controller IO .........................................................................141 4.8.5 Allarmi durante lo scambio diretto di dati tra IO-Controller........................................................143 4.8.6 Allarmi degli azionamenti SINAMICS S120 ...............................................................................143 4.8.7 Funzioni di sistema per la diagnostica per PROFINET risp. PROFIBUS..................................144 4.8.8 Diagnostica apparecchi PROFINET in STEP 7 .........................................................................147 4.8.9 Allarmi di diagnostica PROFINET IO e DS0..............................................................................147 4.8.9.1 Principio di manutenzione allarme di diagnostica PROFINET IO..............................................147 4.8.9.2 Modello degli apparecchi IO Device ..........................................................................................148 4.8.9.3 Allarmi di diagnostica PROFINET IO e DS0..............................................................................150
5 Informazioni generali su Ethernet (collegamenti TCP e UDP) ............................................................... 153
5.1 Interfacce Ethernet.....................................................................................................................153 5.1.1 Panoramica Ethernet .................................................................................................................153 5.1.2 Proprietà delle interfacce Ethernet SIMOTION..........................................................................153 5.1.3 Utilizzo dell'interfaccia Ethernet .................................................................................................154
5.2 Libreria di comunicazione LCom................................................................................................154
5.3 Comunicazione TCP ..................................................................................................................155 5.3.1 Panoramica comunicazione TCP...............................................................................................155 5.3.2 Funzioni di sistema SIMOTION per comunicazione TCP..........................................................158 5.3.2.1 Panoramica delle funzioni di sistema SIMOTION......................................................................158 5.3.2.2 Funzione di sistema _tcpOpenServer() .....................................................................................159 5.3.2.3 Funzione di sistema _tcpOpenClient() .......................................................................................160
Indice del contenuto
Comunicazione 10 Manuale di sistema, 11/2010
5.3.2.4 Funzione di sistema _tcpSend()................................................................................................ 161 5.3.2.5 Funzione di sistema _tcpReceive() ........................................................................................... 162 5.3.2.6 Funzione di sistema _tcpCloseConnection()............................................................................. 163 5.3.2.7 Funzione di sistema _tcpCloseServer() .................................................................................... 163 5.3.3 Blocchi di comunicazione SIMATIC interfaccia Ethernet onboard ........................................... 164 5.3.3.1 Panoramica blocchi di comunicazione SIMATIC ...................................................................... 164 5.3.3.2 Struttura e parametrizzazione UDT65 ...................................................................................... 165 5.3.3.3 Descrizione dei blocchi di comunicazione ................................................................................ 167 5.3.4 Blocchi di comunicazione SIMATIC per Ethernet CP ............................................................... 171 5.3.4.1 Panoramica blocchi comunicazione SIMATIC.......................................................................... 171 5.3.4.2 Progettazione Ethernet CP ....................................................................................................... 172 5.3.4.3 Descrizione dei blocchi di comunicazione ................................................................................ 176
5.4 Comunicazione UDP................................................................................................................. 177 5.4.1 Panoramica Comunicazione UDP ............................................................................................ 177 5.4.2 Funzioni di sistema SIMOTION per comunicazione UDP ........................................................ 178 5.4.2.1 Panoramica delle funzioni di sistema SIMOTION..................................................................... 178 5.4.2.2 Funzione di sistema _udpSend() .............................................................................................. 179 5.4.2.3 Funzione di sistema _udpReceive().......................................................................................... 180 5.4.2.4 Funzione di sistema _udpAddMulticastGroupMembership() .................................................... 181 5.4.2.5 Funzione di sistema _udpDropMulticastGroupMembership()................................................... 182 5.4.3 Blocchi di comunicazione SIMATIC interfaccia Ethernet onboard ........................................... 182 5.4.3.1 Panoramica blocchi di comunicazione SIMATIC ...................................................................... 182 5.4.4 Blocchi di comunicazione SIMATIC per Ethernet CP ............................................................... 183 5.4.4.1 Panoramica sul blocco di comunicazione S7 UDP................................................................... 183 5.4.4.2 Progettazione Ethernet CP ....................................................................................................... 184
6 Routing - Comunicazione oltre i limiti della rete ..................................................................................... 187
6.1 Cosa significa routing?.............................................................................................................. 187
6.2 Progettazione del routing S7..................................................................................................... 188
6.3 Routing con SIMOTION ............................................................................................................ 189
6.4 Routing con SIMOTION D (esempio D4x5 con CBE30)........................................................... 190
6.5 Routing con SIMOTION D4x5-2 (esempio D455-2 DP/PN) ..................................................... 193
6.6 Routing in SIMOTION D a SINAMICS Integrated..................................................................... 196
6.7 Routing con SIMOTION P350................................................................................................... 197
6.8 Routing con SIMOTION P320................................................................................................... 199
7 SIMOTION IT......................................................................................................................................... 201
7.1 SIMOTION IT - Panoramica...................................................................................................... 201
7.2 Accesso web a SIMOTION ....................................................................................................... 203
7.3 SIMOTION IT DIAG .................................................................................................................. 204
7.4 SIMOTION IT OPC XML-DA..................................................................................................... 206
7.5 Trasferimento dati FTP ............................................................................................................. 207
8 PROFIsafe............................................................................................................................................. 209
8.1 Rapporti di comunicazione con Drive Based Safety................................................................. 209
8.2 Telegrammi e segnali con Drive Based Safety ......................................................................... 211
Indice del contenuto
Comunicazione Manuale di sistema, 11/2010 11
8.3 Funzioni F-Proxy di SIMOTION .................................................................................................212
8.4 Caratteristiche di PROFIsafe durante la progettazione .............................................................214
8.5 PROFIsafe tramite PROFINET..................................................................................................217 8.5.1 Concetti fondamentali del proxy F dell'I-Device.........................................................................217 8.5.2 Apparecchi supportati e requisiti software per proxy F dell'I-Device .........................................218 8.5.3 Descrizione dettagliata/caratteristiche del proxy F dell'I-Device................................................220 8.5.4 Panoramiche di topologia del proxy F dell'I-Device...................................................................221 8.5.4.1 Topologia del proxy F dell'I-Device per apparecchi di azionamento PROFIBUS......................221 8.5.4.2 Topologia del proxy F dell'I-Device per apparecchi di azionamento PROFINET......................222 8.5.4.3 Topologia del proxy F dell'I-Device per apparecchi di azionamento PROFIBUS e
PROFINET.................................................................................................................................223 8.5.5 Progettazione del proxy F dell'I-Device .....................................................................................224 8.5.5.1 Processo di progettazione principale del proxy F dell'I-Device .................................................224 8.5.5.2 Esempio di progettazione di SIMOTION D435 e SINAMICS S120 tramite PROFINET............226 8.5.5.3 Adattamento dell'indirizzo F nel progetto esistente ...................................................................232 8.5.5.4 Progettazione di D435 con S120 su PROFINET e PROFIBUS integrato .................................235 8.5.5.5 Conversione di un impianto esistente con PROFIsafe tramite PROFIBUS a PROFIsafe
tramite PROFINET.....................................................................................................................239 8.5.5.6 Informazioni generali sugli indirizzi F con proxy F dell'I-Device ................................................241 8.5.6 Shared Device tramite PROFINET ............................................................................................242 8.5.6.1 Informazioni generali su Shared Device ....................................................................................242 8.5.6.2 Shared Device in un progetto STEP 7.......................................................................................243 8.5.6.3 Progettazione di C240 PN e F-CPU con S120 come Shared Device .......................................248
8.6 PROFIsafe tramite PROFIBUS..................................................................................................254 8.6.1 Informazioni generali per PROFIsafe su PROFIBUS ................................................................254 8.6.2 Apparecchi supportati e requisiti software PROFIsafe su PROFIBUS......................................254 8.6.3 Proxy F dell'I-Slave ....................................................................................................................255 8.6.3.1 Concetti fondamentali del proxy F dell'I-Slave...........................................................................255 8.6.3.2 Topologia del proxy F dell'I-Slave per apparecchi di azionamento PROFIBUS........................256 8.6.3.3 PROFIsafe via PROFIBUS in caso di utilizzo di SIMOTION D .................................................256 8.6.4 Traffico trasversale F .................................................................................................................263 8.6.4.1 Concetti fondamentali del traffico trasversale F.........................................................................263 8.6.4.2 Topologia del traffico trasversale F tramite PROFIBUS ............................................................264 8.6.4.3 PROFIsafe tramite PROFIBUS con traffico trasversale F sull'esempio SIMOTION D..............264
8.7 Progettazione PROFIsafe - Test e verbali di collaudo...............................................................269
8.8 Ulteriori informazioni su SIMOTION e PROFIsafe.....................................................................269
9 PROFIdrive............................................................................................................................................ 271
9.1 L'importanza dei profili ...............................................................................................................271
9.2 Panoramica PROFIdrive ............................................................................................................272
9.3 Modello base/parametri PROFIdrive .........................................................................................273
9.4 Segmentazione nelle classi di applicazioni................................................................................277
9.5 Tipi di dati specifici per PROFIdrive...........................................................................................279
9.6 Comunicazione aciclica (Base Mode Parameter Access) .........................................................284 9.6.1 Comunicazione aciclica .............................................................................................................284 9.6.2 Lettura e scrittura di parametri con Base Mode Parameter Access ..........................................284 9.6.3 Set di dati parametri Request/Response ...................................................................................286
Indice del contenuto
Comunicazione 12 Manuale di sistema, 11/2010
9.6.4 Specifiche per PROFIBUS DP e PROFINET IO....................................................................... 290 9.6.5 Valutazione dell'errore .............................................................................................................. 292 9.6.6 Informazioni supplementari sui parametri di un azionamento PROFIdrive .............................. 295 9.6.7 Comandi di sistema in SIMOTION............................................................................................ 296 9.6.7.1 Comandi di sistema SIMOTION _writeRecord/_readRecord.................................................... 296 9.6.7.2 Comandi di sistema SIMOTION _writeDrive.../_readDrive... .................................................... 297 9.6.7.3 Confronto dei comandi di sistema............................................................................................. 298 9.6.7.4 Cancellazione di ordini _readDrive- e _writeDrive .................................................................... 299 9.6.8 Regole per l'applicazione di _readRecord e _writeRecord ....................................................... 299 9.6.8.1 Regola 1 - L'ordine ha un proprio riferimento d'ordine.............................................................. 299 9.6.8.2 Regola 2 - Funzioni di sistema con programmazione asincrona.............................................. 300 9.6.8.3 Regola 3 - Un set di dati scrittura/lettura per ogni apparecchio di azionamento
PROFIdrive................................................................................................................................ 302 9.6.8.4 Regola 4 - In SIMOTION vince l'ultimo richiamo ...................................................................... 302 9.6.8.5 Regola 5 - Possibilità di max. 5 richiami contemporanei in SIMOTION ................................... 304 9.6.9 Regole per comandi SIMOTION _writeDrive.../_readDrive....................................................... 306 9.6.9.1 Campo di validità per le regole ................................................................................................. 306 9.6.9.2 Regola 6 - Richiamo della funzione di sistema con la programmazione asincrona ................. 306 9.6.9.3 Regola 7 -- Blocco della possibilità di più richiami contemporanei per ogni apparecchio di
destinazione .............................................................................................................................. 307 9.6.9.4 Regola 8 - Rilascio del blocco dopo l'elaborazione completa di un ordine............................... 309 9.6.9.5 Regola 9 - Annullamento di ordini con richiamo asincrono....................................................... 310 9.6.9.6 Regola 10 - Amministrazione di 16 ordini ................................................................................. 313 9.6.9.7 Regola 11 - Ordini paralleli di diversi apparecchi di azionamento............................................ 313 9.6.10 Particolarità ............................................................................................................................... 315 9.6.10.1 Regola 12 - Buffer dei dati di max. 64 oggetti di azionamento ................................................. 315 9.6.10.2 Regola 13 - Un utilizzo combinato delle funzioni di sistema è possibile................................... 315 9.6.10.3 Regola 14 - Blocco in caso di utilizzo combinato dei comandi ................................................. 317 9.6.11 Esempi di programmi ................................................................................................................ 317 9.6.11.1 Esempio di programma............................................................................................................. 317
10 Appendice.............................................................................................................................................. 321
10.1 Tipi di dati standard PROFIBUS/PROFINET (disponibile solo in inglese) ............................... 321
10.2 Tipi di dati specifici per profilo PROFIBUS/PROFINET (disponibile solo in inglese)................ 332
Indice analitico....................................................................................................................................... 339
Comunicazione Manuale di sistema, 11/2010 13
Premessa 11.1 Argomento comunicazione nella documentazione SIMOTION
Panoramica In merito all'argomento comunicazione sono disponibili indicazioni nei singoli manuali del prodotto, nei manuali di programmazione e nel presente manuale sulla comunicazione.
Manuale sulla comunicazione Il manuale sulla comunicazione comprende soprattutto informazioni importanti per la comunicazione degli apparecchi SIMOTION con apparecchi estranei alla famiglia di prodotti SIMOTION, in particolare SIMATIC.
Il presente manuale illustra quindi i passaggi necessari per la progettazione, che devono essere eseguiti da entrambi i partner per stabilire un rapporto di comunicazione perfettamente funzionante.
Pertanto il manuale approfondisce anche gli aspetti relativi alle impostazioni e alla programmazione delle stazioni SIMATIC S7 in quanto partner di comunicazione di SIMOTION.
Manuali del prodotto e manuali di programmazione I manuali del prodotto trattano l'argomento comunicazione soprattutto dalla prospettiva degli stessi apparecchi, cioè in relazione alle caratteristiche elettriche delle interfacce disponibili, nonché alle relative possibilità di impostazione con il sistema di engineering SIMOTION SCOUT.
Ulteriori informazioni sono disponibili anche nei manuali Principi macchine modulari e Funzioni base, che fanno parte del pacchetto di documentazione di SIMOTION.
In questo manuale non vengono fornite indicazioni su come impostare le proprie stazioni partner.

Premessa 1.1 Argomento comunicazione nella documentazione SIMOTION
Comunicazione 14 Manuale di sistema, 11/2010
Comunicazione Manuale di sistema, 11/2010 15
Panoramica delle funzioni e dei servizi di comunicazione 22.1 Possibilità della rete
2.1.1 Premessa Quale componente integrale della "Totally Integrated Automation" (TIA) le soluzioni di rete SIMOTION e SIMATIC offrono la flessibilità e le caratteristiche prestazionali necessarie per le esigenze di comunicazione della relativa applicazione, indipendentemente da quanto questa sia semplice o complessa.
Nota
La presente sezione fornisce una descrizione generale delle funzioni e dei servizi di comunicazione disponibili nell'ambito della tecnica di automazione Siemens. Ciò non significa necessariamente che anche tutte le funzioni citate siano disponibili per SIMOTION. I dettagli sulle funzioni supportate da SIMOTION sono riportati nei capitoli 4 - 8.
Reti SIMOTION e SIMATIC per ogni applicazione I prodotti SIMOTION supportano numerose possibilità di rete. Con queste soluzioni di rete è possibile combinare gli apparecchi SIMOTION conformemente ai requisiti della propria applicazione.
Per l'ulteriore ottimizzazione delle soluzioni di rete i prodotti SIMOTION offrono funzioni e servizi di comunicazione integrati per l'incremento delle potenzialità del protocollo di rete.
2.1.2 PROFINET
Panoramica PROFINET si basa sullo Standard Industrial Ethernet aperto per l'automazione industriale ai fini della comunicazione nell'intera azienda e amplia la funzionalità di scambio dei dati dei componenti di automazione fino all'ambiente Office, in modo che tali componenti, persino gli apparecchi di campo decentrati e gli azionamenti, si possano collegare alla Local Area Network (LAN).
Poiché PROFINET collega tra loro tutti i livelli dell'organizzazione, dagli apparecchi di campo ai sistemi di gestione, è possibile convertire il sistema di engineering dell'impianto tramite comuni standard IT. Come per ogni soluzione basata su Industrial Ethernet, PROFINET supporta reti elettriche, ottiche e senza fili.
Panoramica delle funzioni e dei servizi di comunicazione 2.1 Possibilità della rete
Comunicazione 16 Manuale di sistema, 11/2010
Poiché PROFINET si basa su Industrial Ethernet e non si tratta di un'implementazione "PROFIBUS for Ethernet" modificata, PROFINET può sfruttare la base attualmente installata degli apparecchi compatibili con Ethernet. Anche se PROFINET non è un sistema master/slave, i servizi di comunicazione PROFINET IO e PROFINET CBA offrono la funzionalità richiesta dai sistemi di automazione:
● Con PROFINET IO è possibile collegare gli apparecchi di campo decentrati (ad es. unità di segnale digitali o analogiche) e gli azionamenti direttamente a una sottorete Industrial Ethernet.
● PROFINET CBA (Component Based Automation) supporta soluzioni modulari per la costruzione di macchine e impianti. Il sistema di automazione viene definito in termini di componenti autonomi, ognuno dei quali è preposto a compiti indipendenti e chiusi in se stessi.
Entrambi i servizi di comunicazione offrono una funzionalità in tempo reale, per garantire l'implementazione in tempo reale di PROFINET. Inoltre PROFINET consente la contemporanea presenza nella stessa rete della comunicazione in tempo reale del processo di automazione e di una diversa comunicazione IT, senza alcuna compromissione del fattore "in tempo reale" del sistema di automazione.
Per supportare anche applicazioni senza errori o "rilevanti per la sicurezza" il profilo PROFIsafe comunica con gli apparecchi senza errori tramite la sottorete PROFINET.
2.1.3 Industrial Ethernet
Panoramica Affinché Industrial Ethernet appronti una rete di comunicazione per il collegamento di livello di comando e livello di cella, con Industrial Ethernet è possibile estendere le funzionalità di scambio di dati dei propri componenti di automazione all'ambiente Office.
Industrial Ethernet si basa sulle norme IEEE 802.3 e IEEE 802.3u per la comunicazione tra computer e sistemi di automazione e consente così al sistema di scambiare grandi quantitativi di dati su notevoli distanze.
2.1.4 PROFIBUS
Panoramica PROFIBUS si basa sulle norme IEC 61158 / EN 50170 e offre una soluzione con bus di campo aperto per l'automazione completa di produzione e processi. PROFIBUS offre uno scambio di dati rapido e affidabile, nonché funzionalità di diagnostica integrate. PROFIBUS supporta soluzioni indipendenti dal produttore con il più ampio servizio di assistenza a livello mondiale per prodotti di terzi. Per la propria sottorete PROFIBUS è possibile impiegare numerosi supporti di trasmissione: elettrici, ottici e senza fili.
Panoramica delle funzioni e dei servizi di comunicazione 2.1 Possibilità della rete
Comunicazione Manuale di sistema, 11/2010 17
PROFIBUS comprende i seguenti servizi di comunicazione:
● PROFIBUS DP (Decentralized Peripherals) è un protocollo di comunicazione particolarmente adatto per l'automazione della produzione. PROFIBUS DP offre uno scambio rapido, ciclico e deterministico dei dati di processo tra un master DP bus e gli apparecchi slave assegnati. PROFIBUS DP supporta la comunicazione isocrona. La sincronizzazione dei cicli di esecuzione garantisce che i dati vengano trasmessi a intervalli equidistanti.
● PROFIBUS PA (Process Automation) amplia PROFIBUS DP e offre una trasmissione di dati e prestazioni sicura, conformemente alla norma IEC 61158-2.
● PROFIBUS FMS (Fieldbus Message Specification) è concepito per la comunicazione a livello di cella, in cui i controlli comunicano tra loro. Tramite PROFIBUS FMS sistemi di automazione di diversi produttori possono comunicare tra loro.
● PROFIBUS FDL (Fieldbus Data Link) è stato ottimizzato per la trasmissione di quantità medie di dati, al fine di supportare una trasmissione dati priva di errori nella sottorete PROFIBUS.
Inoltre PROFIBUS utilizza profili per offrire possibilità di comunicazione per le esigenze di determinate applicazioni, ad es. PROFIdrive (per il controllo del movimento) o PROFIsafe (per applicazioni senza errori o "rilevanti per la sicurezza").
2.1.5 MPI (interfaccia multipunto)
Panoramica Le MPI sono interfacce integrate per i prodotti SIMOTION e SIMATIC (apparecchi SIMOTION, apparecchi SIMATIC S7, SIMATIC HMI nonché SIMATIC PC e PG).
MPI offre un'interfaccia per la comunicazione PG/OP. MPI offre anche una semplice funzionalità di rete per l'utilizzo dei seguenti servizi: comunicazione tramite dati globali (GD), comunicazione S7 e comunicazione di base S7.
Il supporto di trasmissione elettrico per MPI utilizza la norma RS 485, che viene impiegata anche da PROFIBUS.
2.1.6 Comunicazione punto a punto (PtP)
Panoramica Gli apparecchi SIMOTION possono essere programmati in modo che scambino dati con altri controlli nella rete. Anche se la comunicazione punto a punto non viene classificata come sottorete, il collegamento punto a punto offre la trasmissione seriale, ad es. tramite RS232 o RS485, dei dati tra due stazioni, ad es. con un controllo SIMATIC o persino con un apparecchio di terzi che supporta la comunicazione.
Panoramica delle funzioni e dei servizi di comunicazione 2.2 Servizi di comunicazione (o funzioni di rete)
Comunicazione 18 Manuale di sistema, 11/2010
Per la comunicazione punto a punto è possibile utilizzare unità CP (ad es. una CP340) o unità ET200, per leggere o scrivere i dati tra due controlli. In questo modo la comunicazione punto a punto rappresenta un'alternativa efficace e conveniente alle soluzioni bus se all'apparecchio SIMOTION devono essere collegati solo pochi apparecchi.
La comunicazione punto a punto offre le seguenti funzionalità:
● Adattamento al protocollo del partner di comunicazione mediante procedura standard o driver caricabili.
● Definizione di un procedimento personalizzato mediante caratteri ASCII
● Comunicazione con altri tipi di apparecchi, come stazioni di comando, stampanti o lettori di schede.
Ulteriore bibliografia Ulteriori indicazioni bibliografiche sulla comunicazione punto a punto sono disponibili nelle descrizioni delle unità CP o ET200.
2.2 Servizi di comunicazione (o funzioni di rete)
2.2.1 Premessa Gli apparecchi SIMOTION e SIMATIC supportano una serie di servizi di comunicazione specifici che gestiscono i pacchetti di dati trasmessi tramite le reti fisiche. Ogni servizio di comunicazione definisce una serie di funzioni e di prestazioni, ad es. i dati da trasferire, gli apparecchi da comandare, gli apparecchi da osservare e i programmi da caricare.
Servizi di comunicazione dei prodotti SIMOTION e SIMATIC I servizi di comunicazione, che spesso vengono anche definiti funzioni di rete, sono componenti software che utilizzano l'hardware fisico delle reti. Le interfacce software (ad es. funzioni di sistema S7) nell'apparecchio di destinazione (ad es. apparecchio SIMOTION, apparecchio SIMATIC S7 o PC) offrono accesso ai servizi di comunicazione. Tuttavia un'interfaccia software non dispone necessariamente di tutte le funzioni per il servizio di comunicazione. Un tale servizio può essere reso disponibile nel rispettivo sistema di destinazione con diverse interfacce software.
Panoramica delle funzioni e dei servizi di comunicazione 2.2 Servizi di comunicazione (o funzioni di rete)
Comunicazione Manuale di sistema, 11/2010 19
2.2.2 Servizi di comunicazione PG/OP
Panoramica I servizi PG/OP sono le funzioni di comunicazione integrate tramite le quali i sistemi di automazione SIMATIC e SIMOTION comunicano con un apparecchio di pogrammazione (ad es. STEP 7) e con apparecchi di comando e di monitoraggio. Tutte le reti SIMOTION e SIMATIC supportano i servizi di comunicazione PG/OP.
2.2.3 Servizi di comunicazione S7
Panoramica I servizi di comunicazione S7 consentono lo scambio dei dati mediante SFB (blocchi funzionali di sistema) e FB (blocchi funzionali) di comunicazione per i collegamenti S7 configurati.
Tutti gli apparecchi SIMOTION e gli apparecchi SIMATIC S7 hanno servizi di comunicazione S7 integrati con i quali il programma utente nel controllo può avviare la lettura e la scrittura dei dati. Queste funzioni non dipendono da reti specifiche, pertanto la programmazione della comunicazione S7 può essere eseguita tramite qualsiasi rete (MPI, PROFIBUS, PROFINET oppure Industrial Ethernet).
Per la trasmissione dei dati tra i controlli è necessario configurare un collegamento tra i due controlli. Le funzioni di comunicazione integrate vengono richiamate da SFB/FB nell'applicazione. È possibile trasferire fino a 64 KB di dati tra apparecchi SIMOTION e SIMATIC S7.
Le apparecchiature HMI, i dispositivi di programmazione (PG) e i computer possono essere utilizzati per accedere ai dati del controllore, perché i servizi di comunicazione S7 sono integrati nel sistema operativo degli apparecchi SIMOTION e dell'apparecchio SIMATIC S7. Questo tipo di collegamento Peer-to-Peer non necessita di alcuna configurazione supplementare (tuttavia, se si configura un collegamento a uno di questi apparecchi, è possibile accedere ai dati tramite i nomi simbolici).
Nota
In SIMOTION non si possono utilizzare SFB.
Panoramica delle funzioni e dei servizi di comunicazione 2.2 Servizi di comunicazione (o funzioni di rete)
Comunicazione 20 Manuale di sistema, 11/2010
2.2.4 Servizi di comunicazione di base S7
Panoramica I servizi di comunicazione di base S7 consentono lo scambio dei dati mediante funzioni del sistema di comunicazione (SFC) per i collegamenti S7 non configurati. Questi SFC (ad es. X_GET o X_PUT) leggono o scrivono i dati su un controllo SIMATIC, per trasferire piccole quantità di dati tramite una sottorete MPI a un'altra stazione S7 (controllo S7, HMI o PC).
Gli SFC per la comunicazione di base S7 non comunicano con stazioni in altre sottoreti. Per la comunicazione di base S7 non è necessario configurare alcun collegamento. I collegamenti vengono realizzati quando il programma utente richiama SFC.
Nota
I servizi di comunicazione di base S7 si possono utilizzare tramite un collegamento MPI tra controlli SIMATIC S7-300, S7-400 o C7-600.
2.2.5 Servizio di comunicazione "dati globali"
Panoramica Oltre alle altre opzioni per la comunicazione di rete è possibile configurare un collegamento "dati globali" (GD), per rendere disponibile la trasmissione ciclica dei dati tra i controlli SIMATIC collegati a una rete MPI. I dati vengono scambiati nell'ambito del normale scambio di immagini di processo, poiché la comunicazione globale dei dati è integrata nel sistema operativo del controllo SIMATIC.
La ricezione dei dati globali non viene confermata, poiché questo tipo di comunicazione è un processo per la trasmissione di dati. Un publisher (sorgente di dati) invia i dati a uno o più subscriber (deposito dati) e i subscriber ricevono i dati. Il publisher non riceve alcuna conferma da parte dei subscriber in merito all'avvenuta ricezione dei dati trasmessi.
Nota
La comunicazione globale dei dati si può utilizzare tramite un collegamento MPI tra controlli SIMATIC S7-300, S7-400 o C7-600
e non richiede una particolare programmazione, né l'uso di blocchi nel programma utente STEP 7. I sistemi operativi dei singoli controlli elaborano lo scambio dei dati globali. Con STEP 7 si configura una tabella dei dati globali (GD) con il percorso di origine dei dati da trasmettere ai subscriber. Questa tabella GD viene caricata con la configurazione hardware per publisher e subscriber.
I dati globali non sono disponibili per SIMOTION.
Panoramica delle funzioni e dei servizi di comunicazione 2.2 Servizi di comunicazione (o funzioni di rete)
Comunicazione Manuale di sistema, 11/2010 21
2.2.6 Servizi di comunicazione PROFINET
Panoramica PROFINET comprende i seguenti servizi di comunicazione:
● Con il servizio di comunicazione PROFINET IO è possibile collegare gli apparecchi I/O e gli azionamenti tramite la rete fisica Ethernet al controllo SIMOTION o SIMATIC. Con PROFINET IO il programma utente eseguito nel controllo può elaborare i dati di ingresso e di uscita degli apparecchi I/O e degli azionamenti. L'indirizzamento per PROFINET IO viene configurato in STEP 7 o in SIMOTION SCOUT.
● Con PROFINET CBA è possibile definire il proprio sistema di automazione in base a sottounità o componenti autonomi. Per questi componenti può trattarsi di apparecchi e sottoreti PROFINET IO, PROFIBUS DP o anche di terzi.
Se si desidera impiegare i servizi di comunicazione PROFINET CBA per una soluzione basata su componenti, configurare i controlli SIMATIC e gli apparecchi I/O in singoli componenti in STEP 7. Successivamente configurare la comunicazione tra i diversi componenti con SIMATIC iMAP.
Entrambi i servizi di comunicazione PROFINET IO e PROFINET CBA offrono la funzionalità in tempo reale richiesta dai sistemi di automazione.
Nota
PROFINET CBA è disponibile solo per apparecchi SIMATIC, non per apparecchi SIMOTION.
2.2.7 Servizi di comunicazione Industrial Ethernet
Panoramica Industrial Ethernet si basa sulle norme IEEE 802.3 e IEEE 802.3u e collega i sistemi di automazione con il proprio sistema business, in modo da garantire l'accesso e l'elaborazione dei dati dall'ufficio.
Industrial Ethernet comprende i seguenti servizi di comunicazione:
● La trasmissione ISO offre servizi per il trasferimento dei dati tramite collegamenti che supportano la trasmissione dati senza errori. La trasmissione ISO è possibile solo con STEP7.
● Con TCP/IP è possibile scambiare blocchi di dati correlati tra controlli e computer in reti PROFINET o Industrial Ethernet. Con TCP/IP il controllo invia blocchi di dati correlati.
● ISO-on-TCP (RFC 1006) supporta la trasmissione dati senza errori. Con SIMOTION solo se si lavora con SCOUT ONLINE. Se la comunicazione avviene dal programma utente è necessario programmare lo stesso RFC.
Panoramica delle funzioni e dei servizi di comunicazione 2.2 Servizi di comunicazione (o funzioni di rete)
Comunicazione 22 Manuale di sistema, 11/2010
● UDP (User Datagram Protocol) e UDP Multi-Cast offrono una semplice trasmissione dei dati senza conferma. È possibile trasferire i blocchi di dati correlati da una stazione all'altra, ad es. tra un controllo SIMOTION e un controllo SIMATIC, un PC o un sistema di terzi.
● Per la comunicazione IT (tecnologia delle informazioni) mediante servizi e protocolli Standard-Ethernet, ad es. FTP, HTTP e e-mail, è possibile usare contemporaneamente dati trasmessi con reti PROFINET o Industrial Ethernet.
2.2.8 Servizi di comunicazione PROFIBUS
Panoramica PROFIBUS comprende i seguenti servizi di comunicazione:
● PROFIBUS DP (Distributed Peripherals) richiede la comunicazione trasparente con la periferia decentrata. Il programma utente SIMOTION/STEP 7 accede alla periferia decentrata così come a I/O nel supporto unità centrale del controllo (o di SPS). PROFIBUS DP consente la comunicazione diretta con la periferia decentrata. PROFIBUS DP è conforme alle norme EN 61158 / EN 50170.
● PROFIBUS PA (Process Automation) agevola la comunicazione diretta con strumenti dell'automazione dei processi (PA). Ciò comprende sia l'accesso ciclico a I/O, di solito con un master SPS, sia l'accesso non ciclico alla serie potenzialmente ampia di parametri operativi, di solito con uno strumento di engineering come Process Device Manager (PDM). PROFIBUS PA è conforme alla norma IEC 61158
● PROFIBUS FMS (Fieldbus Message Specification) consente la trasmissione di dati strutturati (variabili FMS). PROFIBUS FMS è conforme alla norma IEC 61784
● PROFIBUS FDL (Fieldbus Data Link) è stato ottimizzato per la trasmissione di quantità medie di dati, al fine di supportare una trasmissione dati priva di errori nella sottorete PROFIBUS. PROFIBUS FDL supporta la funzione SDA (invio di dati con conferma)
Nota
Gli apparecchi SIMOTION supportano esclusivamente il servizio di comunicazione PROFIBUS DP.
Per la comunicazione senza errori gli apparecchi SIMOTION e SIMATIC utilizzano il profilo PROFIsafe per PROFIBUS DP.
Per la comunicazione tra apparecchi SIMOTION e gli azionamenti collegati gli apparecchi SIMOTION utilizzano il profilo PROFIdrive.
Ulteriore bibliografia Un confronto tra le funzioni di sistema SIMATIC S7 e SIMOTION è presente nella directory 2_FAQ sul CD Utilities & Applications.
Panoramica delle funzioni e dei servizi di comunicazione 2.3 Ulteriori procedure per lo scambio di informazioni
Comunicazione Manuale di sistema, 11/2010 23
2.3 Ulteriori procedure per lo scambio di informazioni Oltre alle reti di comunicazione standard SIMOTION e SIMATIC utilizzano ulteriori mezzi per la condivisione delle informazioni tramite le reti.
Condivisione dati con altre applicazioni tramite OPC (OLE for Process Control)
OPC (OLE for Process Control) consente alle applicazioni Windows di accedere ai dati di processo e quindi di combinare e utilizzare insieme i dispositivi e le applicazioni di produttori diversi. OPC non offre soltanto un'interfaccia aperta e indipendente dal produttore, ma anche una configurazione client/server di facile uso per lo scambio standardizzato dei dati (ad es. tra applicazioni HMI o Office) che non necessitano di una rete o di un protocollo specifici.
Il server OPC fornisce interfacce per il collegamento delle applicazioni client OPC. Configurare l'applicazione client per l'accesso alle sorgenti dati, ad es. indirizzi nella memoria di un SPS. Poiché più client OPC possono accedere contemporaneamente allo stesso server OPC è possibile utilizzare le stesse sorgenti di dati per tutte le applicazione OPC.
Oltre ai server OPC, SIMATIC NET offre anche applicazioni per la configurazione e il test dei collegamenti OPC: Advanced PC Configuration (APC) e OPC Scout (per il test e la messa in funzione di un'applicazione OPC o di un server OPC). Questi tool consentono di collegare i prodotti SIMOTION e SIMATIC S7 alle altre applicazioni OPC.
I server OPC SIMATIC NET supportano i seguenti servizi di comunicazione:
● PROFINET IO (tramite sottorete PROFINET o Industrial Ethernet)
● PROFINET CBA (tramite sottorete PROFINET o Industrial Ethernet)
● TCP/IP (tramite sottorete PROFINET o Industrial Ethernet)
● PROFIBUS DP (tramite sottorete PROFIBUS)
● PROFIBUS FMS (tramite sottorete PROFIBUS)
● Comunicazione S7
● Comunicazione compatibile S5
Utilizzo comune dei dati in un ambiente Office tramite tecnologia delle informazioni (IT) SIMOTION e SIMATIC utilizzano i normali strumenti IT (come E-Mail - solo SIMATIC, server web HTTP, FTP e SNMP) con PROFINET e reti Industrial Ethernet, per ampliare le funzionalità di utilizzo comune dei dati nell'ambiente Office.
Per gli apparecchi SIMOTION vengono messe a disposizione le funzioni corrispondenti tramite SIMOTION IT DIAG; vedere Funzioni di diagnostica e HMI basate su Ethernet di SIMOTION IT.
Panoramica delle funzioni e dei servizi di comunicazione 2.3 Ulteriori procedure per lo scambio di informazioni
Comunicazione 24 Manuale di sistema, 11/2010
Comunicazione Manuale di sistema, 11/2010 25
PROFIBUS 33.1 Comunicazione PROFIBUS
3.1.1 Comunicazione PROFIBUS (panoramica)
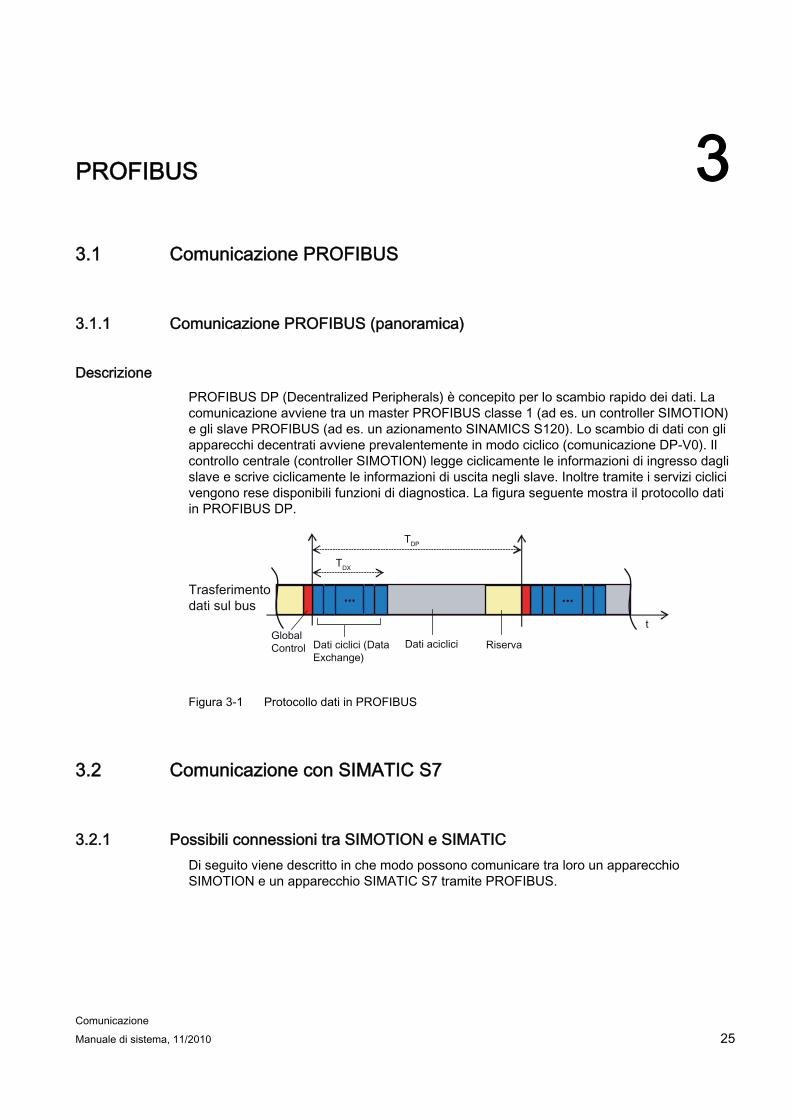
Descrizione PROFIBUS DP (Decentralized Peripherals) è concepito per lo scambio rapido dei dati. La comunicazione avviene tra un master PROFIBUS classe 1 (ad es. un controller SIMOTION) e gli slave PROFIBUS (ad es. un azionamento SINAMICS S120). Lo scambio di dati con gli apparecchi decentrati avviene prevalentemente in modo ciclico (comunicazione DP-V0). Il controllo centrale (controller SIMOTION) legge ciclicamente le informazioni di ingresso dagli slave e scrive ciclicamente le informazioni di uscita negli slave. Inoltre tramite i servizi ciclici vengono rese disponibili funzioni di diagnostica. La figura seguente mostra il protocollo dati in PROFIBUS DP.
Figura 3-1 Protocollo dati in PROFIBUS
3.2 Comunicazione con SIMATIC S7
3.2.1 Possibili connessioni tra SIMOTION e SIMATIC Di seguito viene descritto in che modo possono comunicare tra loro un apparecchio SIMOTION e un apparecchio SIMATIC S7 tramite PROFIBUS.
PROFIBUS 3.2 Comunicazione con SIMATIC S7
Comunicazione 26 Manuale di sistema, 11/2010
A questo scopo sono disponibili diverse possibilità:
● Un apparecchio SIMOTION viene collegato al sistema master DP di un SIMATIC S7 come slave DP.
● Un apparecchio SIMATIC S7 viene collegato al sistema master DP di un SIMOTION come slave DP.
● Tra SIMOTION e SIMATIC S7 viene impiegata una comunicazione master-master.
Per l'accoppiamento come slave DP si distinguono ancora 2 varianti:
● L'integrazione come norm-slave tramite un file GSD.
● L'integrazione come slave DP intelligente (I-slave).
Vengono definite I-Slave le stazioni dotate di intelligenza propria e che possono essere definite slave DP solo in funzione della programmazione nel loro set di funzioni.
Ciò significa che è innanzitutto necessario progettare queste funzioni in relazione alla loro struttura di comunicazione, prima di poterle impiegare come I-Slave.
Le stazioni I-Slave disponibili sono riportate nel catalogo HW di Config HW nella cartella "Stazioni già progettate".
Differenza: slave DP "normale" (norm-slave) - slave DP intelligente (i-slave) Nel caso di uno slave DP "normale", come ad es. uno slave DP compatto (ET 200eco) o modulare (ET 200M) il master DP accede agli ingressi/uscite decentrati.
Nello slave DP intelligente, il master DP non accede direttamente agli ingressi/uscite collegati dello slave DP intelligente, bensì ad un'area di trasferimento nell'area di ingresso/uscita della "CPU in stato di pre-elaborazione". Il programma utente della CPU in stato di pre-elaborazione deve garantire lo scambio dei dati tra l'area operativa e gli ingressi/le uscite.
Nota
Le aree I/O progettate per lo scambio dei dati tra master e slave non devono essere "occupate" da unità I/O.
3.2.2 SIMOTION come slave DP in un SIMATIC S7
3.2.2.1 Premessa Di seguito vengono descritte le possibilità di accoppiamento di un apparecchio SIMOTION come slave PROFIBUS DP a una rete PROFIBUS.
PROFIBUS 3.2 Comunicazione con SIMATIC S7
Comunicazione Manuale di sistema, 11/2010 27
Esistono 2 possibilità:
● L'apparecchio SIMOTION viene collegato come norm-slave al sistema master DP tramite un file GSD.
● L'apparecchio SIMOTION viene integrato come cosiddetto slave DP intelligente (I-Slave) nel sistema master DP.
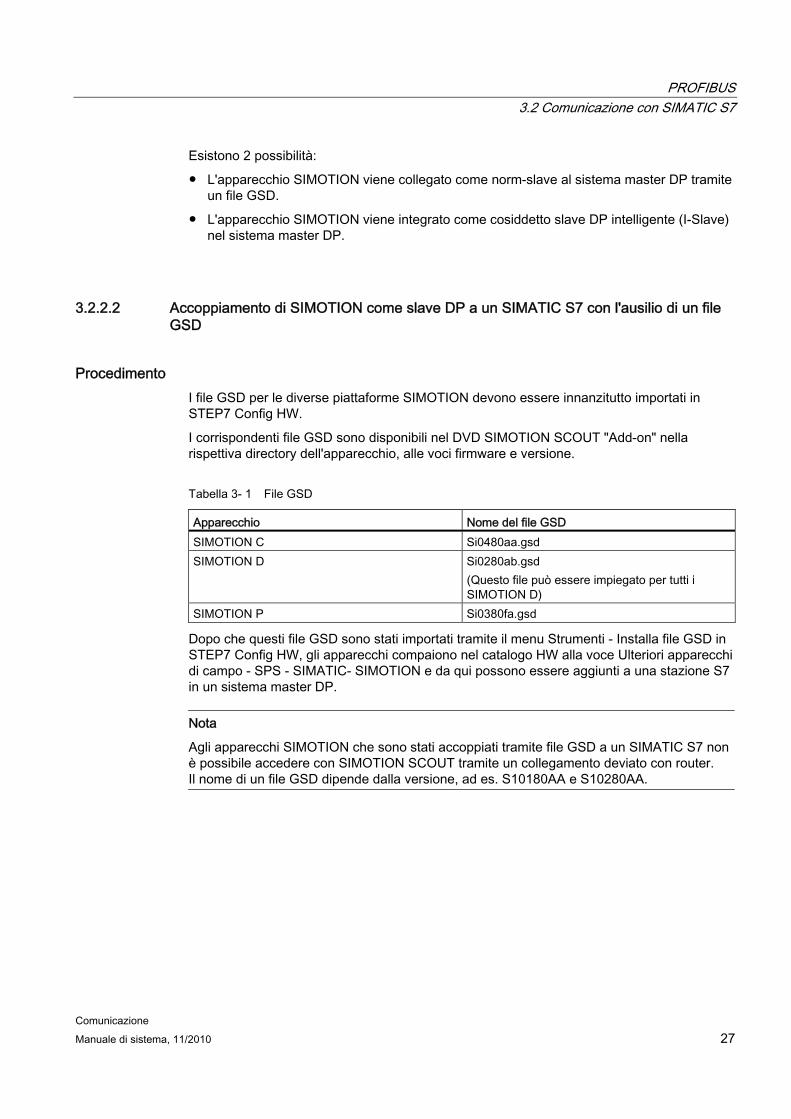
3.2.2.2 Accoppiamento di SIMOTION come slave DP a un SIMATIC S7 con l'ausilio di un file GSD
Procedimento I file GSD per le diverse piattaforme SIMOTION devono essere innanzitutto importati in STEP7 Config HW.
I corrispondenti file GSD sono disponibili nel DVD SIMOTION SCOUT "Add-on" nella rispettiva directory dell'apparecchio, alle voci firmware e versione.
Tabella 3- 1 File GSD
Apparecchio Nome del file GSD SIMOTION C Si0480aa.gsd SIMOTION D Si0280ab.gsd
(Questo file può essere impiegato per tutti i SIMOTION D)
SIMOTION P Si0380fa.gsd
Dopo che questi file GSD sono stati importati tramite il menu Strumenti - Installa file GSD in STEP7 Config HW, gli apparecchi compaiono nel catalogo HW alla voce Ulteriori apparecchi di campo - SPS - SIMATIC- SIMOTION e da qui possono essere aggiunti a una stazione S7 in un sistema master DP.
Nota
Agli apparecchi SIMOTION che sono stati accoppiati tramite file GSD a un SIMATIC S7 non è possibile accedere con SIMOTION SCOUT tramite un collegamento deviato con router. Il nome di un file GSD dipende dalla versione, ad es. S10180AA e S10280AA.
PROFIBUS 3.2 Comunicazione con SIMATIC S7
Comunicazione 28 Manuale di sistema, 11/2010
Nota
Tramite un nodo di rete è possibile eseguire il collegamento con router anche su azionamenti aggiunti come azionamento singolo.
In questo modo sugli azionamenti SIEMENS che possono essere progettati in SCOUT/STARTER è possibile creare collegamenti tramite router anche se questi vengono progettati come slave GSD / GSDML-Device in Config HW. In questo caso vale la limitazione che, tramite impostazione dei parametri di accesso online (Apparecchio di destinazione->Accesso online), si può configurare un punto di passaggio di rete in funzione dell'ID sottorete.
Inoltre il nome del file GSD viene assegnato in base alla versione.
3.2.2.3 Accoppiamento di SIMOTION come I-Slave a SIMATIC S7
Presupposti ● Sul PC del sistema di engineering devono essere installati SIMOTION SCOUT e STEP7.
● SIMATIC S7 e la stazione SIMOTION devono trovarsi nello stesso progetto.
Se questi presupposti sono soddisfatti, SIMOTION può essere collegato alla rete PROFIBUS DP di SIMATIC anche come cosiddetto I-Slave.
Procedimento È consigliabile che la progettazione della stazione SIMOTION come slave DP sia stata ultimata prima che la stazione venga posizionata come slave nel fascio DP della CPU SIMATIC.
Di seguito viene descritto il procedimento per un SIMOTION C. Il procedimento è uguale fino alla selezione della piattaforma SIMOTION.
1. Configurazione di una stazione come slave DP, ad es. SIMOTION C2xx Fare doppio clic sull'interfaccia desiderata (ad es. DP2/MPI) nella tabella di configurazione e selezionare nella scheda Modo operativo l'opzione Slave DP.
2. Configurazione degli indirizzi I/O locali Nella scheda Configurazione è possibile impostare gli indirizzi I/O locali e l'indirizzo di diagnostica.
3. Passare alla stazione SIMATIC progettata, che deve fungere da master DP per SIMOTION.
4. Creazione di un I-Slave Trascinare il tipo di stazione "C2xx/P3xx/D4xx-I-Slave" dalla finestra Catalogo hardware (cartella stazioni già progettate) tramite Drag & Drop sul simbolo del sistema master DP della stazione SIMATIC.
PROFIBUS 3.2 Comunicazione con SIMATIC S7
Comunicazione Manuale di sistema, 11/2010 29
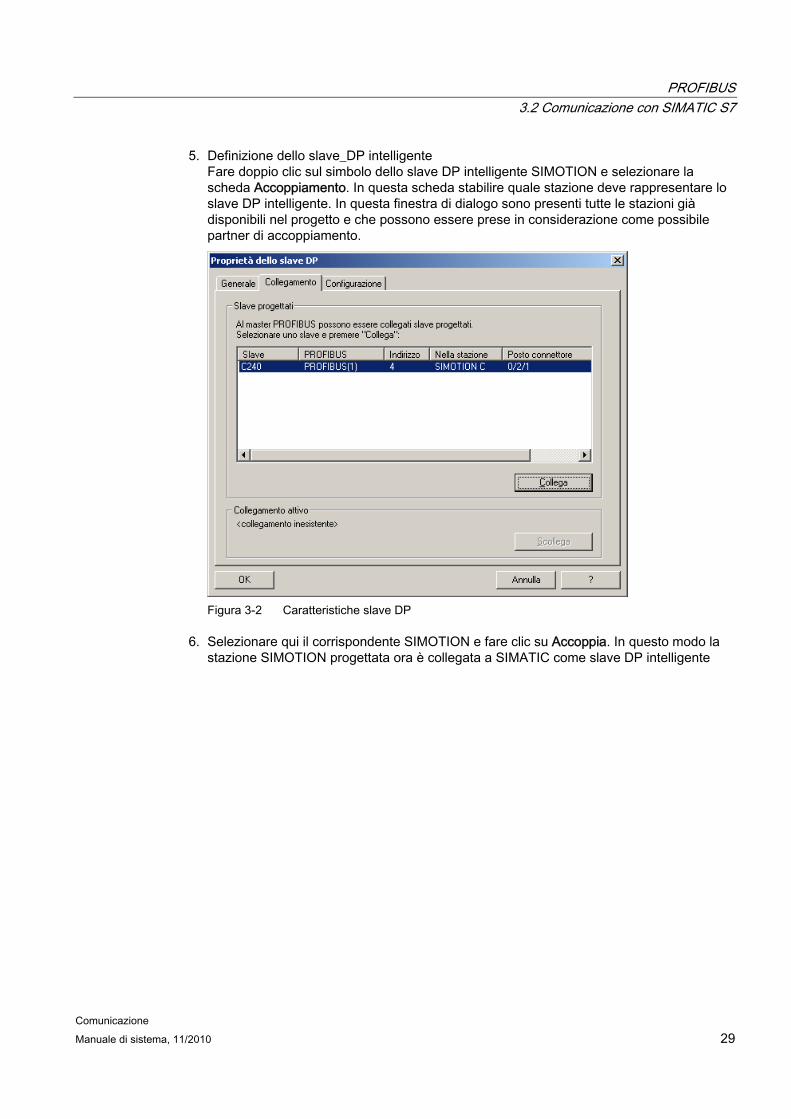
5. Definizione dello slave_DP intelligente Fare doppio clic sul simbolo dello slave DP intelligente SIMOTION e selezionare la scheda Accoppiamento. In questa scheda stabilire quale stazione deve rappresentare lo slave DP intelligente. In questa finestra di dialogo sono presenti tutte le stazioni già disponibili nel progetto e che possono essere prese in considerazione come possibile partner di accoppiamento.
Figura 3-2 Caratteristiche slave DP
6. Selezionare qui il corrispondente SIMOTION e fare clic su Accoppia. In questo modo la stazione SIMOTION progettata ora è collegata a SIMATIC come slave DP intelligente
PROFIBUS 3.2 Comunicazione con SIMATIC S7
Comunicazione 30 Manuale di sistema, 11/2010
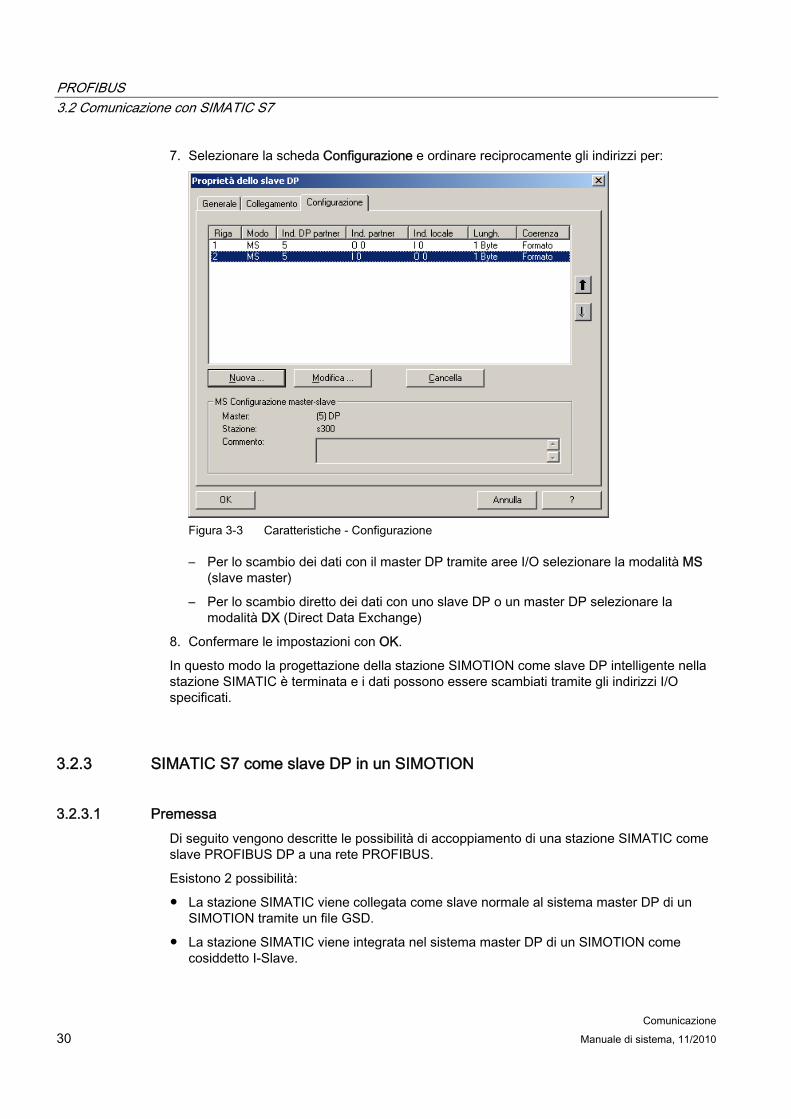
7. Selezionare la scheda Configurazione e ordinare reciprocamente gli indirizzi per:
Figura 3-3 Caratteristiche - Configurazione
– Per lo scambio dei dati con il master DP tramite aree I/O selezionare la modalità MS (slave master)
– Per lo scambio diretto dei dati con uno slave DP o un master DP selezionare la modalità DX (Direct Data Exchange)
8. Confermare le impostazioni con OK.
In questo modo la progettazione della stazione SIMOTION come slave DP intelligente nella stazione SIMATIC è terminata e i dati possono essere scambiati tramite gli indirizzi I/O specificati.
3.2.3 SIMATIC S7 come slave DP in un SIMOTION
3.2.3.1 Premessa Di seguito vengono descritte le possibilità di accoppiamento di una stazione SIMATIC come slave PROFIBUS DP a una rete PROFIBUS.
Esistono 2 possibilità:
● La stazione SIMATIC viene collegata come slave normale al sistema master DP di un SIMOTION tramite un file GSD.
● La stazione SIMATIC viene integrata nel sistema master DP di un SIMOTION come cosiddetto I-Slave.
PROFIBUS 3.2 Comunicazione con SIMATIC S7
Comunicazione Manuale di sistema, 11/2010 31
3.2.3.2 Accoppiamento di SIMATIC come slave DP a un apparecchio SIMOTION con l'ausilio di un file GSD
Processo I file GSD per le diverse stazioni SIMATIC devono essere innanzitutto importati in STEP7 Config HW.
I corrispondenti file GSD sono disponibili nell'assistenza al prodotto al sito: http://support.automation.siemens.com/ww/view/en/113652.
Dopo che questi file GSD sono stati importati tramite il menu Strumenti - Installa file GSD in STEP7 Config HW, gli apparecchi compaiono nel catalogo HW alla voce Ulteriori apparecchi di campo - SPS - SIMATIC e da qui possono essere aggiunti a una stazione SIMOTION in un sistema master DP.
Sugli apparecchi SIMATIC S7 che sono stati accoppiati a un apparecchio SIMOTION tramite file GSD, non è possibile accedere con STEP7 tramite un collegamento con router.
3.2.3.3 Accoppiamento della CPU SIMATIC S7 come I-Slave a un apparecchio SIMOTION
Premesse ● Sul PC del sistema di engineering è installato SIMOTION SCOUT e quindi anche
SIMATIC STEP7.
● SIMATIC S7 e la stazione SIMOTION devono trovarsi nello stesso progetto.
Se questi requisiti sono soddisfatti, SIMATIC può essere collegato alla rete PROFIBUS DP di SIMOTION anche come cosiddetto I-Slave.
Procedimento È consigliabile che la progettazione della stazione SIMATIC come slave DP sia stata ultimata prima che la stazione venga posizionata come slave nel ramo DP della CPU SIMOTION.
Di seguito viene descritto il procedimento per una CPU 315-2 DP. Il procedimento è uguale fino alla selezione dei tipi di CPU anche per un S7-400.
1. Configurare una stazione ad es. con la CPU 315-2 DP come slave DP. Fare doppio clic sulla riga 2.1 (interfaccia) nella tabella di configurazione e selezionare l'opzione slave DP nella scheda Modo operativo.
2. Nella scheda Configurazione è possibile impostare gli indirizzi I/O locali e l'indirizzo di diagnostica.
3. Passare alla stazione SIMOTION progettata, che deve fungere da master DP per SIMATIC.
4. Trascinare il tipo di stazione CPU 31x o CPU 41x corrispondente dalla finestra Catalogo hardware (cartella stazioni già progettate) tramite Drag & Drop sul simbolo del sistema master DP della stazione SIMOTION.
PROFIBUS 3.2 Comunicazione con SIMATIC S7
Comunicazione 32 Manuale di sistema, 11/2010
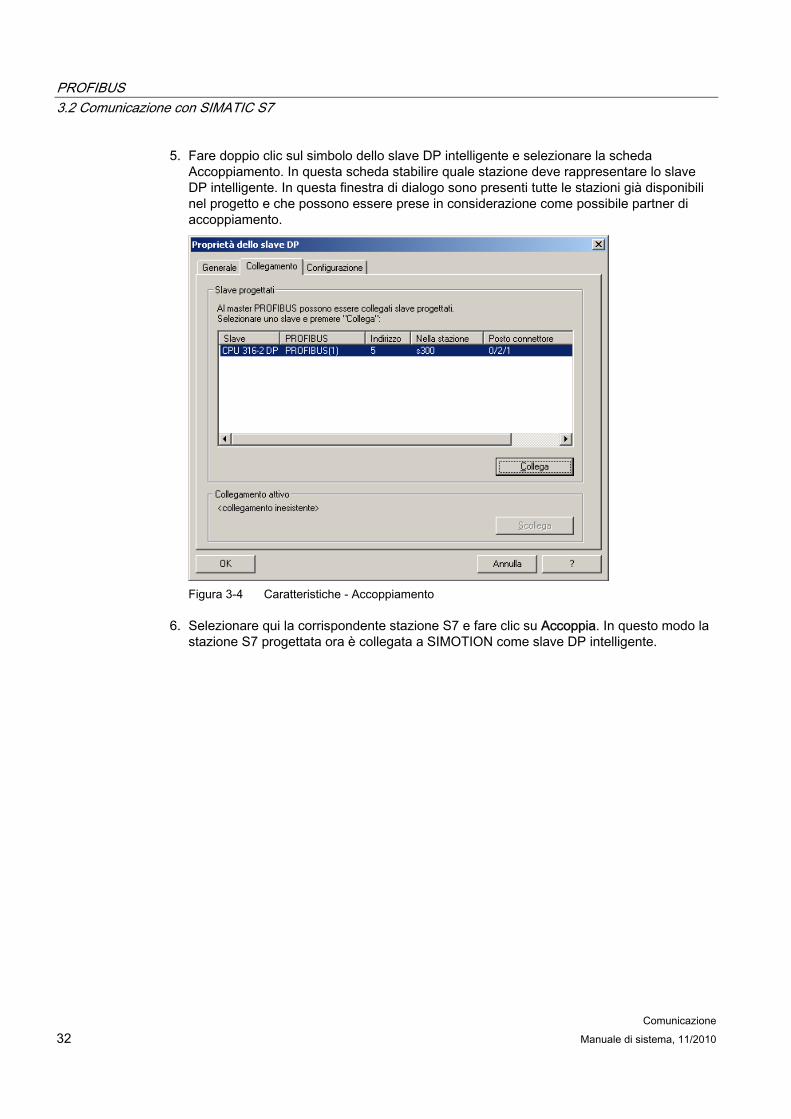
5. Fare doppio clic sul simbolo dello slave DP intelligente e selezionare la scheda Accoppiamento. In questa scheda stabilire quale stazione deve rappresentare lo slave DP intelligente. In questa finestra di dialogo sono presenti tutte le stazioni già disponibili nel progetto e che possono essere prese in considerazione come possibile partner di accoppiamento.
Figura 3-4 Caratteristiche - Accoppiamento
6. Selezionare qui la corrispondente stazione S7 e fare clic su Accoppia. In questo modo la stazione S7 progettata ora è collegata a SIMOTION come slave DP intelligente.
PROFIBUS 3.2 Comunicazione con SIMATIC S7
Comunicazione Manuale di sistema, 11/2010 33
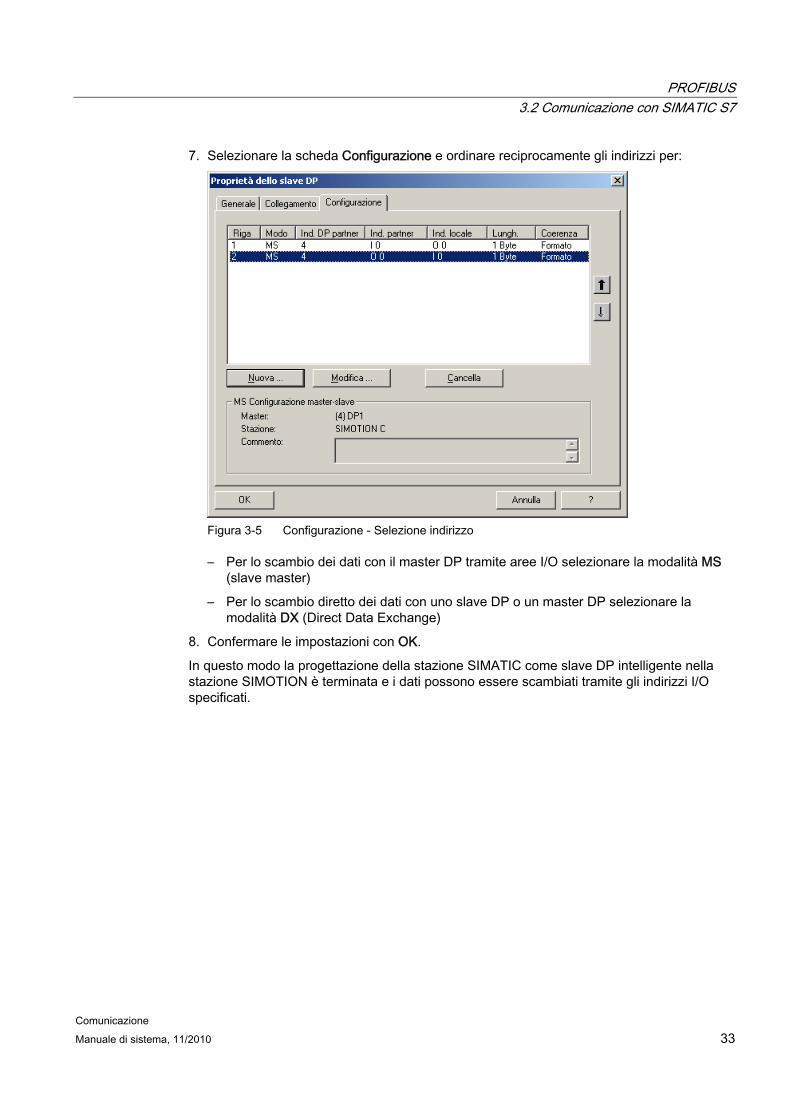
7. Selezionare la scheda Configurazione e ordinare reciprocamente gli indirizzi per:
Figura 3-5 Configurazione - Selezione indirizzo
– Per lo scambio dei dati con il master DP tramite aree I/O selezionare la modalità MS (slave master)
– Per lo scambio diretto dei dati con uno slave DP o un master DP selezionare la modalità DX (Direct Data Exchange)
8. Confermare le impostazioni con OK.
In questo modo la progettazione della stazione SIMATIC come slave DP intelligente nella stazione SIMOTION è terminata e i dati possono essere scambiati tramite gli indirizzi I/O specificati.
PROFIBUS 3.2 Comunicazione con SIMATIC S7
Comunicazione 34 Manuale di sistema, 11/2010
3.2.4 Collegamento master-master PROFIBUS tra SIMATIC e SIMOTION
3.2.4.1 Premessa
Comunicazione master-master Una connessione master-master tra un SIMATIC S7 e un apparecchio SIMOTION tramite PROFIBUS viene creata impiegando le funzioni di sistema SFC65 (XSEND) e SFC66 (XRECEIVE) sul lato SIMATIC e le funzioni di sistema _Xsend e _Xreceive sul lato SIMOTION. Una progettazione della connessione in NetPro non è necessaria.
Tabella 3- 2 Comunicazione master-master
Protocollo Apparecchio SIMATIC
Funzione Apparecchio SIMOTION
Funzione
PROFIBUS CPU S7-300 CPU S7-400
SFC65 (XSEND) SFC66 (XRCV)
SIMOTION C SIMOTION D SIMOTION P
_Xsend _Xreceive
L'assegnazione degli indirizzi PROFIBUS avviene in Config HW. Tutti gli ulteriori parametri del blocco vengono definiti dall'utente per il collegamento e trasferiti al richiamo della funzione. In questo modo il comportamento del collegamento PROFIBUS tra SIMATIC e SIMOTION è analogo a quello di un collegamento TCP/IP tra una stazione SIMATIC con interfaccia Ethernet integrata e un apparecchio SIMOTION o viceversa. I parametri importanti per la comunicazione vengono trasferiti dall'utente in modo mirato e al richiamo di blocchi o di funzioni.
Il capitolo seguente si occupa più dettagliatamente della parametrizzazione di funzioni di sistema sul lato SIMATIC S7 e delle funzioni sul lato SIMOTION.
3.2.4.2 Funzioni di sistema SIMATIC S7 per un collegamento PROFIBUS
Premessa Il collegamento PROFIBUS tra una stazione SIMATIC S7 e un apparecchio SIMOTION è stato trattato nel capitolo precedente. Di seguito occorre spiegare con maggiori dettagli la parametrizzazione delle funzioni di sistema SIMATIC S7 o delle funzoni SIMOTION per un collegamento PROFIBUS.
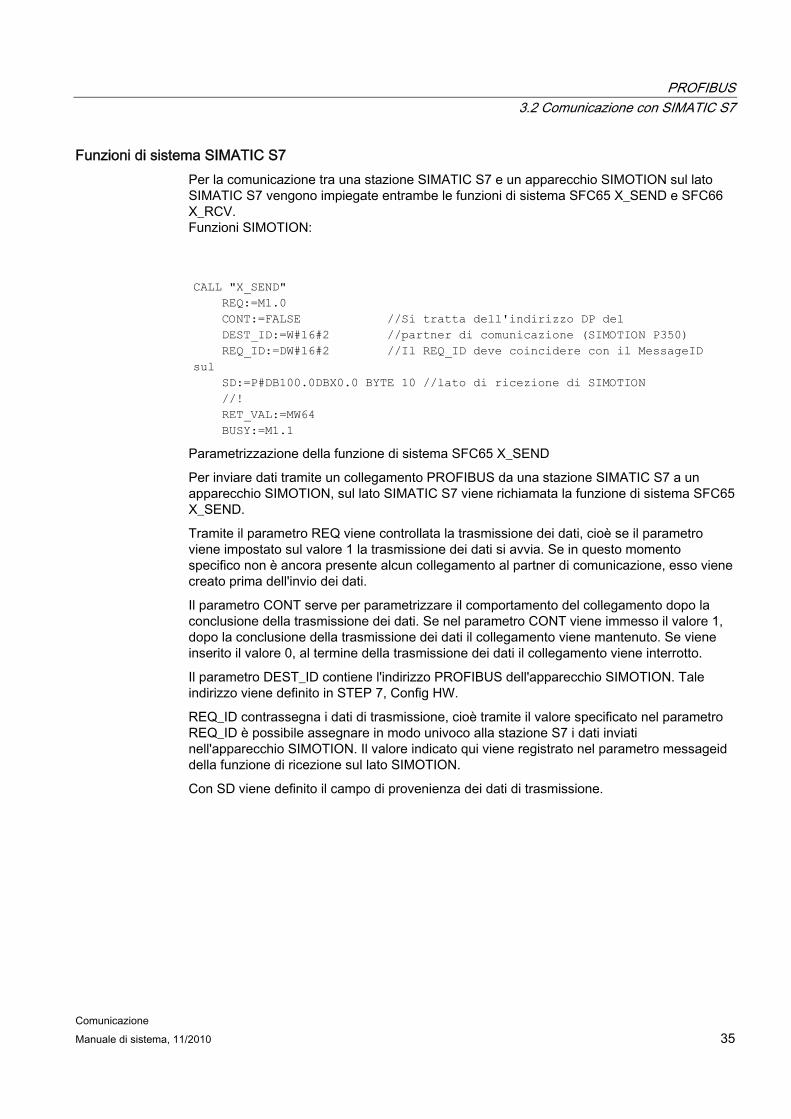
PROFIBUS 3.2 Comunicazione con SIMATIC S7
Comunicazione Manuale di sistema, 11/2010 35
Funzioni di sistema SIMATIC S7 Per la comunicazione tra una stazione SIMATIC S7 e un apparecchio SIMOTION sul lato SIMATIC S7 vengono impiegate entrambe le funzioni di sistema SFC65 X_SEND e SFC66 X_RCV. Funzioni SIMOTION:
CALL "X_SEND" REQ:=M1.0 CONT:=FALSE //Si tratta dell'indirizzo DP del DEST_ID:=W#16#2 //partner di comunicazione (SIMOTION P350) REQ_ID:=DW#16#2 //Il REQ_ID deve coincidere con il MessageID sul SD:=P#DB100.0DBX0.0 BYTE 10 //lato di ricezione di SIMOTION //! RET_VAL:=MW64 BUSY:=M1.1
Parametrizzazione della funzione di sistema SFC65 X_SEND
Per inviare dati tramite un collegamento PROFIBUS da una stazione SIMATIC S7 a un apparecchio SIMOTION, sul lato SIMATIC S7 viene richiamata la funzione di sistema SFC65 X_SEND.
Tramite il parametro REQ viene controllata la trasmissione dei dati, cioè se il parametro viene impostato sul valore 1 la trasmissione dei dati si avvia. Se in questo momento specifico non è ancora presente alcun collegamento al partner di comunicazione, esso viene creato prima dell'invio dei dati.
Il parametro CONT serve per parametrizzare il comportamento del collegamento dopo la conclusione della trasmissione dei dati. Se nel parametro CONT viene immesso il valore 1, dopo la conclusione della trasmissione dei dati il collegamento viene mantenuto. Se viene inserito il valore 0, al termine della trasmissione dei dati il collegamento viene interrotto.
Il parametro DEST_ID contiene l'indirizzo PROFIBUS dell'apparecchio SIMOTION. Tale indirizzo viene definito in STEP 7, Config HW.
REQ_ID contrassegna i dati di trasmissione, cioè tramite il valore specificato nel parametro REQ_ID è possibile assegnare in modo univoco alla stazione S7 i dati inviati nell'apparecchio SIMOTION. Il valore indicato qui viene registrato nel parametro messageid della funzione di ricezione sul lato SIMOTION.
Con SD viene definito il campo di provenienza dei dati di trasmissione.
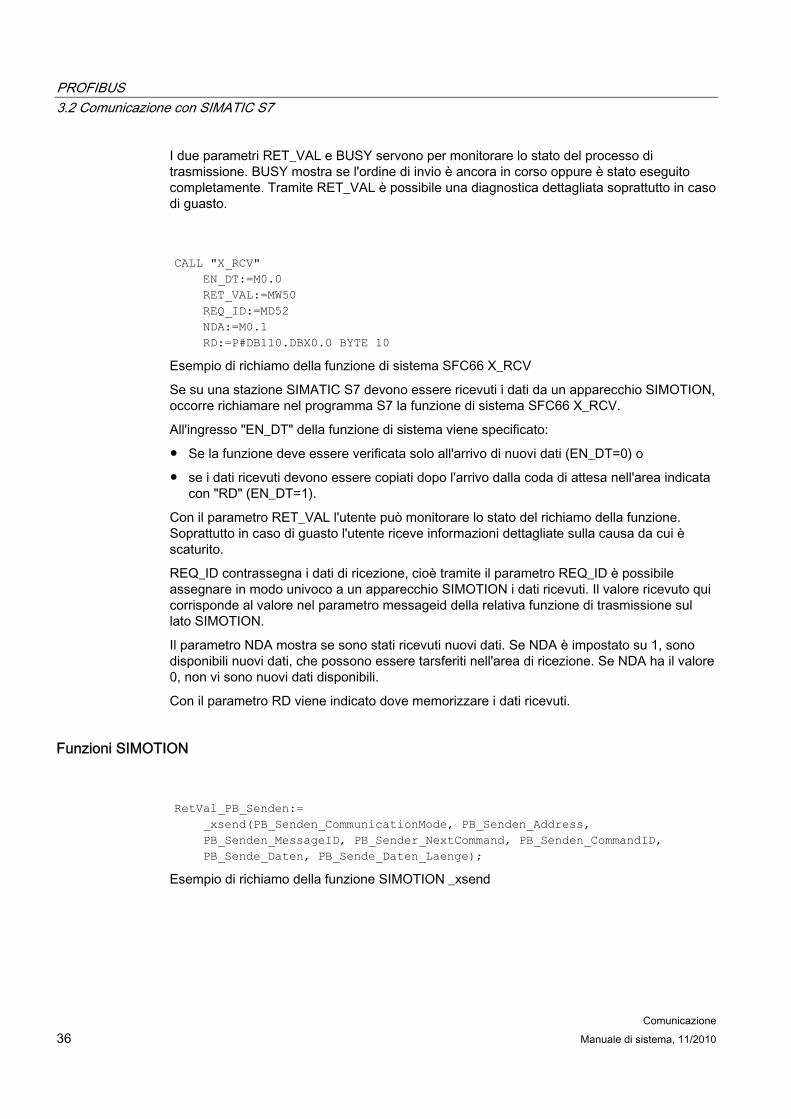
PROFIBUS 3.2 Comunicazione con SIMATIC S7
Comunicazione 36 Manuale di sistema, 11/2010
I due parametri RET_VAL e BUSY servono per monitorare lo stato del processo di trasmissione. BUSY mostra se l'ordine di invio è ancora in corso oppure è stato eseguito completamente. Tramite RET_VAL è possibile una diagnostica dettagliata soprattutto in caso di guasto.
CALL "X_RCV" EN_DT:=M0.0 RET_VAL:=MW50 REQ_ID:=MD52 NDA:=M0.1 RD:=P#DB110.DBX0.0 BYTE 10
Esempio di richiamo della funzione di sistema SFC66 X_RCV
Se su una stazione SIMATIC S7 devono essere ricevuti i dati da un apparecchio SIMOTION, occorre richiamare nel programma S7 la funzione di sistema SFC66 X_RCV.
All'ingresso "EN_DT" della funzione di sistema viene specificato:
● Se la funzione deve essere verificata solo all'arrivo di nuovi dati (EN_DT=0) o
● se i dati ricevuti devono essere copiati dopo l'arrivo dalla coda di attesa nell'area indicata con "RD" (EN_DT=1).
Con il parametro RET_VAL l'utente può monitorare lo stato del richiamo della funzione. Soprattutto in caso di guasto l'utente riceve informazioni dettagliate sulla causa da cui è scaturito.
REQ_ID contrassegna i dati di ricezione, cioè tramite il parametro REQ_ID è possibile assegnare in modo univoco a un apparecchio SIMOTION i dati ricevuti. Il valore ricevuto qui corrisponde al valore nel parametro messageid della relativa funzione di trasmissione sul lato SIMOTION.
Il parametro NDA mostra se sono stati ricevuti nuovi dati. Se NDA è impostato su 1, sono disponibili nuovi dati, che possono essere tarsferiti nell'area di ricezione. Se NDA ha il valore 0, non vi sono nuovi dati disponibili.
Con il parametro RD viene indicato dove memorizzare i dati ricevuti.
Funzioni SIMOTION RetVal_PB_Senden:= _xsend(PB_Senden_CommunicationMode, PB_Senden_Address, PB_Senden_MessageID, PB_Sender_NextCommand, PB_Senden_CommandID, PB_Sende_Daten, PB_Sende_Daten_Laenge);
Esempio di richiamo della funzione SIMOTION _xsend
PROFIBUS 3.2 Comunicazione con SIMATIC S7
Comunicazione Manuale di sistema, 11/2010 37
Se la stazione SIMATIC S7 e l'apparecchio SIMOTION comunicano tramite PROFIBUS, dal lato SIMOTION viene richiamata la funzione _Xsend per l'invio.
Nota
L'invio (_Xsend()) ad un slave DP SIMOTION è solo possibile, se è stato impostato il segno di spunta Programmazione, stato/comando o altre funzioni PG e collegamenti di comunicazione non progettati possibili.
Con il parametro "communicationmode" viene comunicato alla funzione richiamata cosa deve accadere con il collegamento una volta conclusa la trasmissione dei dati. Il tipo di dati della funzione prevede l'assegnazione dei valori ABORT_CONNECTION o HOLD_CONNECTION. Se al parametro viene assegnato il valore ABORT_CONNECTION, al termine della tarsmissione dei dati il collegamento viene interrotto. Con il valore HOLD_CONNECTION la funzione viene parametrizzata in modo che, al termine della trasmissione dei dati, il collegamento venga mantenuto.
Dietro il parametro address si cela una struttura del tipo di dati StructXsendDestAddr, formata ancora una volta da diversi parametri. Questa struttura contiene tutte le informazioni sull'indirizzo del partner di comunicazione dell'apparecchio SIMOTION.
Struttura parametro "StructXsendDestAddr Di seguito vengono riportati e spiegati i singoli parametri della struttura.
Con il parametro deviceid viene considerato il rispettivo hardware SIMOTION. Con il parametro viene specificato il punto di attacco fisico del collegamento. Così per un SIMOTION C2 per l'interfaccia X8 viene inserito il valore 1. Per l'interfaccia X9 viene specificato il valore 2. Se la stazione SIMATIC S7 è collegata al X101 di un SIMOTION P, al parametro deviceid viene assegnato il valore 1. Per l'interfaccia X102 nel parametro deviced viene scritto il valore 2. In SIMOTION D per l'interfaccia X126 viene inserito il valore 1 e per X136 il valore 2 nel parametro deviceid.
Poiché per la comunicazione tramite MPI o PROFIBUS non viene definita alcuna maschera di sottorete, al parametro remotesubnetidlength viene assegnato il valore 0. Ne consegue che il parametro remotesubnetid non è signficativo.
Al parametro remotestaddrlength per la comunicazione MPI o PROFIBUS viene assegnato il valore 1.
Con il parametro nextstaddrlength viene specificata la lunghezza dell'indirizzo del router. Poiché per la comunicazione MPI o PROFIBUS tra la stazione SIMATIC S7 e l'apparecchio SIMOTION non viene impiegato alcun router, per questo parametro viene specificato il valore 0. Di conseguenza anche il parametro nextstaddr non è significativo (vedere anche sotto).
Il seguente parametro remotesubnetid definisce la maschera di sottorete e, come già accennato prima, è irrilevante per la comunicazione tramite MPI o PROFIBUS.
Con il parametro remotestaddr viene specificato l'effettivo indirizzo di destinazione. Il parametro è un array. Per la comunicazione MPI o PROFIBUS viene comunque usato solo il primo indice. Gli altri cinque indici non hanno mai alcun significato.

PROFIBUS 3.2 Comunicazione con SIMATIC S7
Comunicazione 38 Manuale di sistema, 11/2010
Il parametro nextstaddr serve per definire l'indirizzo del router. Per questo parametro vale quanto specificato per il parametro remotesubnetid. Anche il relativo valore è irrilevante per la comunicazione tramite MPI o PROFIBUS.
Per l'identificazione dell'apparecchio SIMOTION sul lato di ricezione il parametro messageid viene definito dall'utente. Il valore inserito consente sulla stazione SIMATIC S7 una assegnazione tramite il parametro REQ_ID. Qui è possibile leggere il valore dal parametro messageid.
Per questa funzione con il parametro nextcommand viene parametrizzato il comportamento della funzione in riferimento all'ulteriore attivazione su richiamo. Sono disponibili due impostazioni: IMMEDIATELY e WHEN_COMMAND_DONE. Con il primo valore la riattivazione avviene immediatamente e con il secondo valore solo dopo la conclusione del comando.
Al richiamo della funzione nel parametro commandid le viene assegnato un numero univoco a livello di sistema, per poter seguire lo stato del comando.
i dati di trasmissione vengono trasferiti tramite i dati Variable della funzione al momento del richiamo.
La lunghezza dei dati da trasferire dall'area di trasmissione viene specificata tramite il parametro datalength.
Il valore di ritorno della funzione _xsend nel programma utente presenta il tipo di dati DINT; tramite i diversi valori di ritorno vengono segnalati problemi legati all'esecuzione della funzione. Viene anche comunicato se i dati sono stati trasmessi correttamente o meno.
RetVal_PB_Empfanen:= _xreceive(PB_Empfangen_MessageID, PB_Empfangen_NextCommand,PB_Empfangen_CommandID);
Esempio di richiamo della funzione SIMOTION xreceive
L'esempio mostra l'utilizzo della funzione _xreceive. La funzione viene impiegata se i dati della stazione SIMATIC S7 devono essere ricevuti tramite PROFIBUS.
Per l'identificazione della stazione S7 dalla quale devono essere ricevuti i dati, alla funzione _xreceive viene trasferito il parametro messageid. Viene immesso il valore assegnato sul lato S7 nel parametro REQ_ID alla corrispondente funzione di sistema _xsend.
Per questa funzione con il parametro nextcommand viene parametrizzato il comportamento della funzione in riferimento all'ulteriore attivazione su richiamo. Sono disponibili due impostazioni: IMMEDIATELY e WHEN_COMMAND_DONE. Con il primo valore la riattivazione avviene immediatamente e con il secondo valore solo dopo la conclusione del comando.
Al richiamo della funzione nel parametro commandid viene distribuito un numero univoco a livello di sistema, per poter seguire lo stato del comando.
La struttura che viene fornita dalla funzione al programma utente contiene i parametri functionresult, datalength e data. Tramite il parametro functionresult è possibile consultare lo stato dei dati ricevuti. Il parametro datalength comunica il numero di byte dei dati utili ricevuti dopo l'avvenuto richiamo della funzione _xreceive. Tramite il parametro data è possibile accedere ai dati utili ricevuti.
Comunicazione Manuale di sistema, 11/2010 39
PROFINET IO 44.1 Panoramica di PROFINET IO
4.1.1 PROFINET IO Nella costruzione delle macchine si osserva una marcata tendenza a concepire macchine sempre più decentrate e soluzioni meccatroniche. In questo modo salgono notevolmente i requisiti per il collegamento in rete degli azionamenti. Diventano inoltre sempre più significativi aspetti quali un numero più elevato di azionamenti e tempi di ciclo più brevi, nonché l'impiego di meccanismi IT.
L'espressione PROFINET IO si applica a entrambi i concetti di successo PROFIBUS DP ed Ethernet. PROFINET IO vanta anni di esperienza costellata di successi con PROFIBUS DP e unisce l'abituale praticità per l'utente all'impiego di principi innovativi della tecnologia Ethernet. In questo modo la tranquilla migrazione da PROFIBUS DP alla realtà PROFINET è garantita.
PROFIBUS DP è un sistema bus nel quale in un determinato momento al bus può accedere un solo nodo (funzionamento half duplex). In PROFINET IO viene impiegata una tecnologia switching di cui ci si avvale anche con Ethernet. In questo modo tutti i segmenti di rete vengono separati e sono possibili la trasmissione e la ricezione contemporanee (funzionamento full duplex) su tutti i cavi. Con la contemporanea trasmissione dei dati di più nodi la rete può così essere sfruttata in modo molto più efficace. In aggiunta a ciò l'ampiezza di banda è stata portata a 100 MBit/s.
Nota
Per informazioni dettagliate sull'argomento PROFINET si rimanda al manuale di sistema SIMATIC PROFINET Descrizione del sistema.
4.1.2 Modello di applicazione Per lo sviluppo di PROFINET IO ci si è concentrati in modo particolare sulla protezione dell'investimento per utente e produttore dell'apparecchio. La migrazione a PROFINET IO avviene nel rispetto del modello di applicazione. Rispetto a PROFIBUS DP la visualizzazione dei dati di processo viene mantenuta completamente per:
● dati I/O (accesso a dati periferici e indirizzi logici)
● set di dati (memorizzazione di parametri e dati) e
● integrazione in un sistema di diagnostica (segnalazione di eventi di diagnostica, buffer di diagnostica)
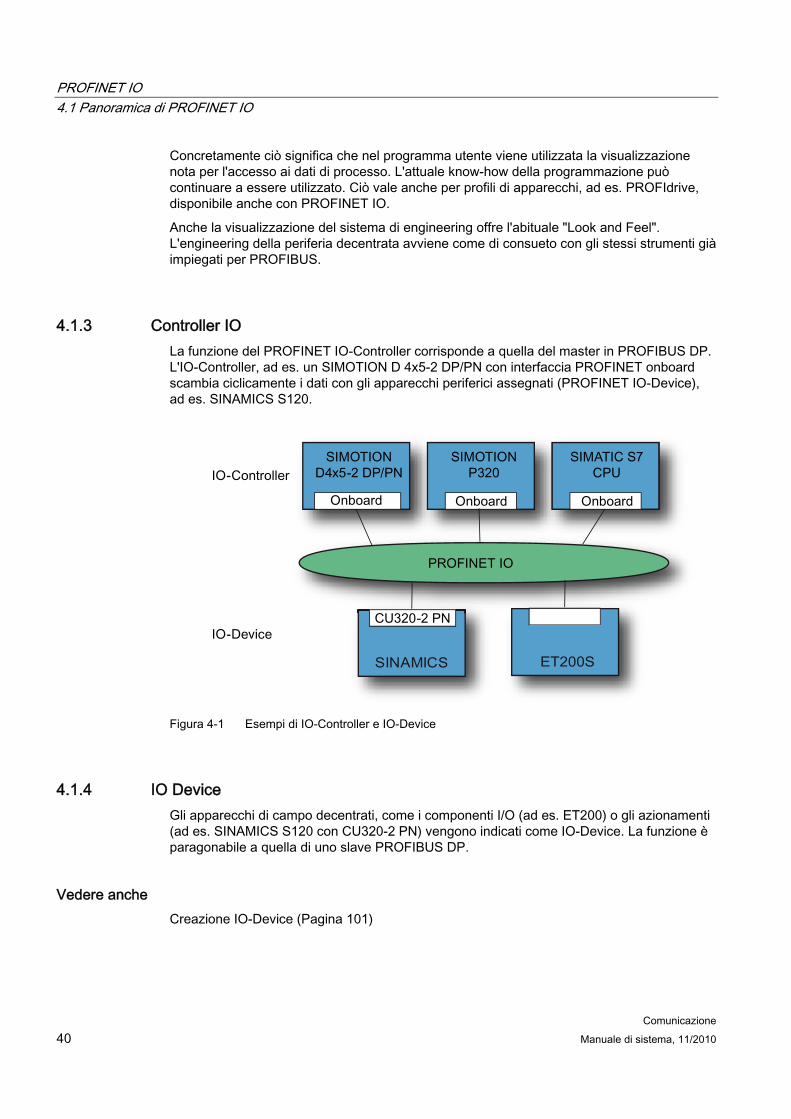
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione 40 Manuale di sistema, 11/2010
Concretamente ciò significa che nel programma utente viene utilizzata la visualizzazione nota per l'accesso ai dati di processo. L'attuale know-how della programmazione può continuare a essere utilizzato. Ciò vale anche per profili di apparecchi, ad es. PROFIdrive, disponibile anche con PROFINET IO.
Anche la visualizzazione del sistema di engineering offre l'abituale "Look and Feel". L'engineering della periferia decentrata avviene come di consueto con gli stessi strumenti già impiegati per PROFIBUS.
4.1.3 Controller IO La funzione del PROFINET IO-Controller corrisponde a quella del master in PROFIBUS DP. L'IO-Controller, ad es. un SIMOTION D 4x5-2 DP/PN con interfaccia PROFINET onboard scambia ciclicamente i dati con gli apparecchi periferici assegnati (PROFINET IO-Device), ad es. SINAMICS S120.
Figura 4-1 Esempi di IO-Controller e IO-Device
4.1.4 IO Device Gli apparecchi di campo decentrati, come i componenti I/O (ad es. ET200) o gli azionamenti (ad es. SINAMICS S120 con CU320-2 PN) vengono indicati come IO-Device. La funzione è paragonabile a quella di uno slave PROFIBUS DP.
Vedere anche Creazione IO-Device (Pagina 101)
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione Manuale di sistema, 11/2010 41
4.1.5 Sistema PROFINET IO Il sistema PROFINET IO è formato dalla combinazione di un controller e dei Device che gli sono stati assegnati.
4.1.6 I-Device L'I-Device in PROFINET ha una funzione paragonabile a quella dell'I-Slave per PROFIBUS, vale a dire che una CPU SIMOTION può assumere il ruolo di un IO-Device e in questo modo scambiare dati con un altro IO-Controller.
Mentre con PROFIBUS un'interfaccia può essere in alternativa solo master o solo slave, con PROFINET è possibile che su un'interfaccia PROFINET si trovino contemporaneamente un IO-Controller e un IO-Device.
4.1.7 Classi RT
4.1.7.1 Classi RT con PROFINET IO
Descrizione PROFINET si basa su standard Ethernet Pertanto tutti i protocolli standard basati su Ethernet (ad es. HTTP, FTP, TCP, UDP, IP ...) possono essere trasferiti tramite la rete PROFINET.
Oltre ai ben noti protocolli dell'ambiente Office, PROFINET offre due protocolli adattati ai requisiti dell'automazione (tipi di trasmissione). Si tratta di PROFINET IO con RT e IRT.
Entrambi i tipi di trasmissione sono ottimizzati per la comunicazione IO ciclica con volumi di dati minimi all'interno di una rete.
RT La comunicazione RT utilizza la possibilità di definizione della priorità dei telegrammi descritta nello standard Ethernet. Questo meccanismo viene impiegato ad es. anche per Voice over IP. Per informazioni più dettagliate consultare il PROFINET IO con RT (Pagina 47).
IRT In PROFINET IO con IRT a Ethernet viene sovraordinata una procedura a tempo. Ciò significa che vengono creati 2 slot, il primo per la trasmissione dei telegrammi IRT e il secondo per quella dei telegrammi RT e IP. In questo modo viene riservata dell'ampiezza di banda per i dati IRT, che risulta garantita in tutte le situazioni di carico/sovraccarico. Affinché tutti gli apparecchi interessati sappiano quando inizia il lasso di tempo, IRT presuppone la sincronizzazione degli apparecchi.
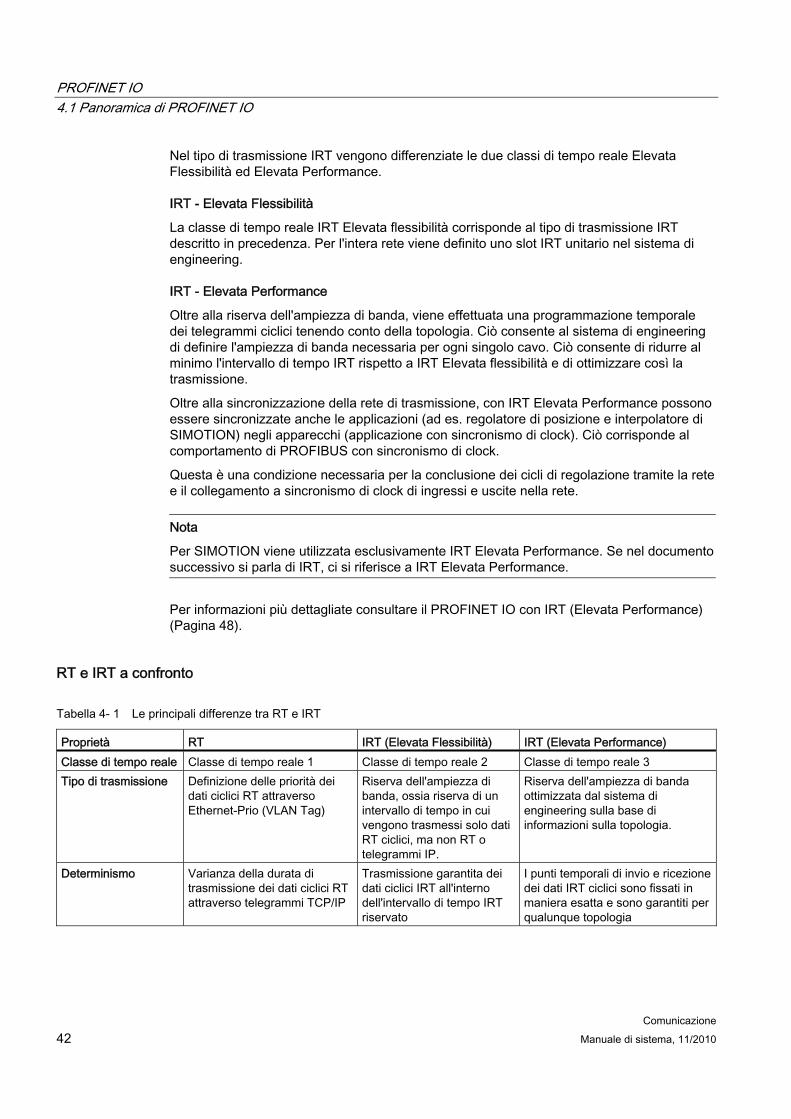
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione 42 Manuale di sistema, 11/2010
Nel tipo di trasmissione IRT vengono differenziate le due classi di tempo reale Elevata Flessibilità ed Elevata Performance.
IRT - Elevata Flessibilità
La classe di tempo reale IRT Elevata flessibilità corrisponde al tipo di trasmissione IRT descritto in precedenza. Per l'intera rete viene definito uno slot IRT unitario nel sistema di engineering.
IRT - Elevata Performance
Oltre alla riserva dell'ampiezza di banda, viene effettuata una programmazione temporale dei telegrammi ciclici tenendo conto della topologia. Ciò consente al sistema di engineering di definire l'ampiezza di banda necessaria per ogni singolo cavo. Ciò consente di ridurre al minimo l'intervallo di tempo IRT rispetto a IRT Elevata flessibilità e di ottimizzare così la trasmissione.
Oltre alla sincronizzazione della rete di trasmissione, con IRT Elevata Performance possono essere sincronizzate anche le applicazioni (ad es. regolatore di posizione e interpolatore di SIMOTION) negli apparecchi (applicazione con sincronismo di clock). Ciò corrisponde al comportamento di PROFIBUS con sincronismo di clock.
Questa è una condizione necessaria per la conclusione dei cicli di regolazione tramite la rete e il collegamento a sincronismo di clock di ingressi e uscite nella rete.
Nota
Per SIMOTION viene utilizzata esclusivamente IRT Elevata Performance. Se nel documento successivo si parla di IRT, ci si riferisce a IRT Elevata Performance.
Per informazioni più dettagliate consultare il PROFINET IO con IRT (Elevata Performance) (Pagina 48).
RT e IRT a confronto
Tabella 4- 1 Le principali differenze tra RT e IRT
Proprietà RT IRT (Elevata Flessibilità) IRT (Elevata Performance) Classe di tempo reale Classe di tempo reale 1 Classe di tempo reale 2 Classe di tempo reale 3 Tipo di trasmissione Definizione delle priorità dei
dati ciclici RT attraverso Ethernet-Prio (VLAN Tag)
Riserva dell'ampiezza di banda, ossia riserva di un intervallo di tempo in cui vengono trasmessi solo dati RT ciclici, ma non RT o telegrammi IP.
Riserva dell'ampiezza di banda ottimizzata dal sistema di engineering sulla base di informazioni sulla topologia.
Determinismo Varianza della durata di trasmissione dei dati ciclici RT attraverso telegrammi TCP/IP
Trasmissione garantita dei dati ciclici IRT all'interno dell'intervallo di tempo IRT riservato
I punti temporali di invio e ricezione dei dati IRT ciclici sono fissati in maniera esatta e sono garantiti per qualunque topologia
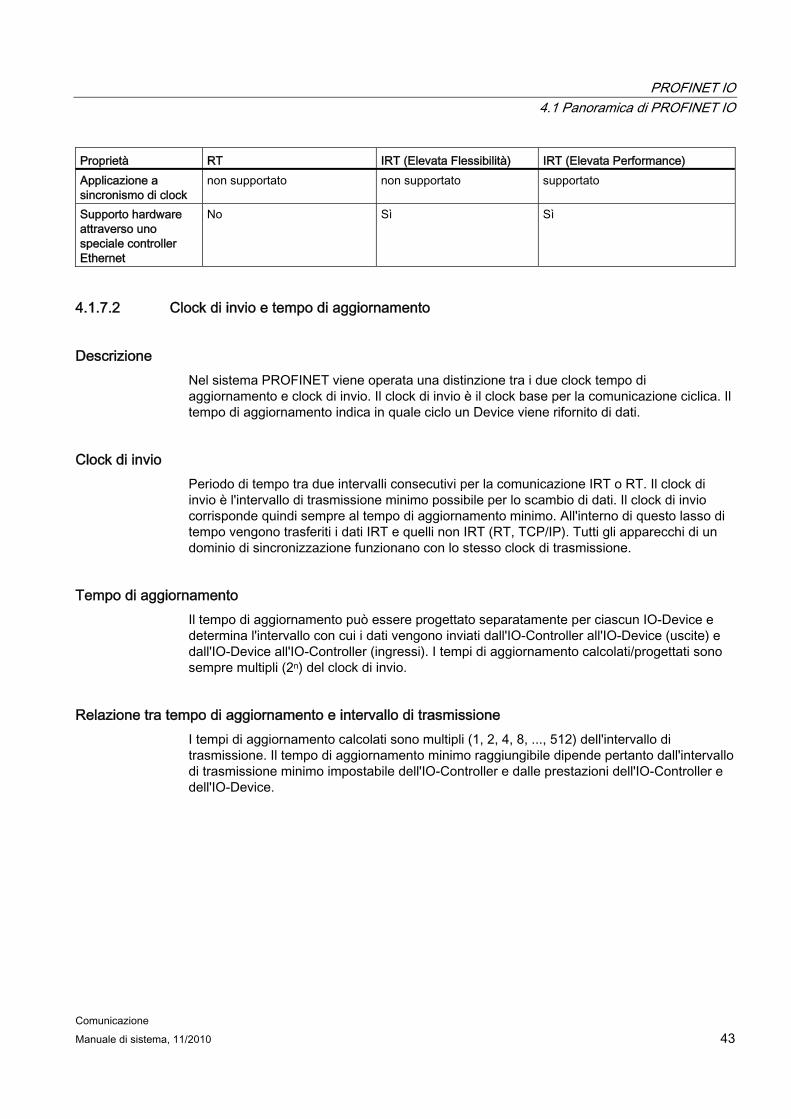
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione Manuale di sistema, 11/2010 43
Proprietà RT IRT (Elevata Flessibilità) IRT (Elevata Performance) Applicazione a sincronismo di clock
non supportato non supportato supportato
Supporto hardware attraverso uno speciale controller Ethernet
No Sì Sì
4.1.7.2 Clock di invio e tempo di aggiornamento
Descrizione Nel sistema PROFINET viene operata una distinzione tra i due clock tempo di aggiornamento e clock di invio. Il clock di invio è il clock base per la comunicazione ciclica. Il tempo di aggiornamento indica in quale ciclo un Device viene rifornito di dati.
Clock di invio Periodo di tempo tra due intervalli consecutivi per la comunicazione IRT o RT. Il clock di invio è l'intervallo di trasmissione minimo possibile per lo scambio di dati. Il clock di invio corrisponde quindi sempre al tempo di aggiornamento minimo. All'interno di questo lasso di tempo vengono trasferiti i dati IRT e quelli non IRT (RT, TCP/IP). Tutti gli apparecchi di un dominio di sincronizzazione funzionano con lo stesso clock di trasmissione.
Tempo di aggiornamento Il tempo di aggiornamento può essere progettato separatamente per ciascun IO-Device e determina l'intervallo con cui i dati vengono inviati dall'IO-Controller all'IO-Device (uscite) e dall'IO-Device all'IO-Controller (ingressi). I tempi di aggiornamento calcolati/progettati sono sempre multipli (2n) del clock di invio.
Relazione tra tempo di aggiornamento e intervallo di trasmissione I tempi di aggiornamento calcolati sono multipli (1, 2, 4, 8, ..., 512) dell'intervallo di trasmissione. Il tempo di aggiornamento minimo raggiungibile dipende pertanto dall'intervallo di trasmissione minimo impostabile dell'IO-Controller e dalle prestazioni dell'IO-Controller e dell'IO-Device.
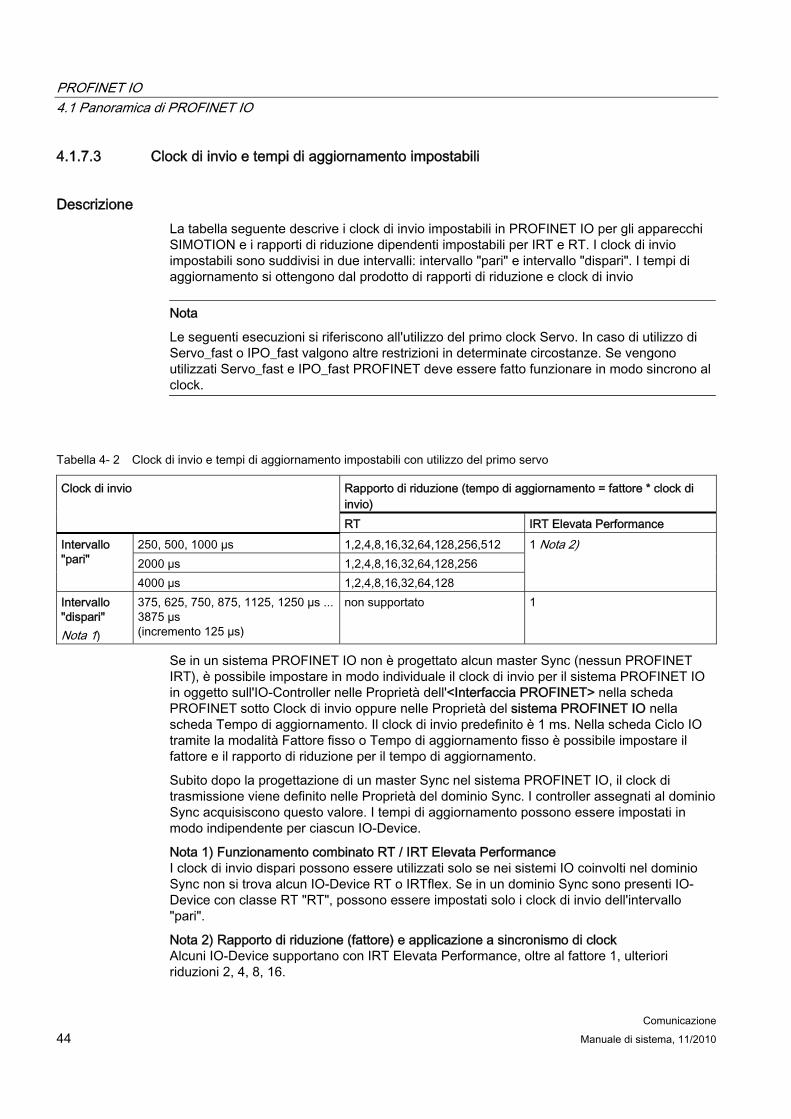
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione 44 Manuale di sistema, 11/2010
4.1.7.3 Clock di invio e tempi di aggiornamento impostabili
Descrizione La tabella seguente descrive i clock di invio impostabili in PROFINET IO per gli apparecchi SIMOTION e i rapporti di riduzione dipendenti impostabili per IRT e RT. I clock di invio impostabili sono suddivisi in due intervalli: intervallo "pari" e intervallo "dispari". I tempi di aggiornamento si ottengono dal prodotto di rapporti di riduzione e clock di invio
Nota
Le seguenti esecuzioni si riferiscono all'utilizzo del primo clock Servo. In caso di utilizzo di Servo_fast o IPO_fast valgono altre restrizioni in determinate circostanze. Se vengono utilizzati Servo_fast e IPO_fast PROFINET deve essere fatto funzionare in modo sincrono al clock.
Tabella 4- 2 Clock di invio e tempi di aggiornamento impostabili con utilizzo del primo servo
Rapporto di riduzione (tempo di aggiornamento = fattore * clock di invio)
Clock di invio
RT IRT Elevata Performance 250, 500, 1000 µs 1,2,4,8,16,32,64,128,256,512 2000 µs 1,2,4,8,16,32,64,128,256
Intervallo "pari"
4000 µs 1,2,4,8,16,32,64,128
1 Nota 2)
Intervallo "dispari" Nota 1)
375, 625, 750, 875, 1125, 1250 µs ... 3875 µs (incremento 125 µs)
non supportato 1
Se in un sistema PROFINET IO non è progettato alcun master Sync (nessun PROFINET IRT), è possibile impostare in modo individuale il clock di invio per il sistema PROFINET IO in oggetto sull'IO-Controller nelle Proprietà dell'<Interfaccia PROFINET> nella scheda PROFINET sotto Clock di invio oppure nelle Proprietà del sistema PROFINET IO nella scheda Tempo di aggiornamento. Il clock di invio predefinito è 1 ms. Nella scheda Ciclo IO tramite la modalità Fattore fisso o Tempo di aggiornamento fisso è possibile impostare il fattore e il rapporto di riduzione per il tempo di aggiornamento.
Subito dopo la progettazione di un master Sync nel sistema PROFINET IO, il clock di trasmissione viene definito nelle Proprietà del dominio Sync. I controller assegnati al dominio Sync acquisiscono questo valore. I tempi di aggiornamento possono essere impostati in modo indipendente per ciascun IO-Device.
Nota 1) Funzionamento combinato RT / IRT Elevata Performance I clock di invio dispari possono essere utilizzati solo se nei sistemi IO coinvolti nel dominio Sync non si trova alcun IO-Device RT o IRTflex. Se in un dominio Sync sono presenti IO-Device con classe RT "RT", possono essere impostati solo i clock di invio dell'intervallo "pari".
Nota 2) Rapporto di riduzione (fattore) e applicazione a sincronismo di clock Alcuni IO-Device supportano con IRT Elevata Performance, oltre al fattore 1, ulteriori riduzioni 2, 4, 8, 16.
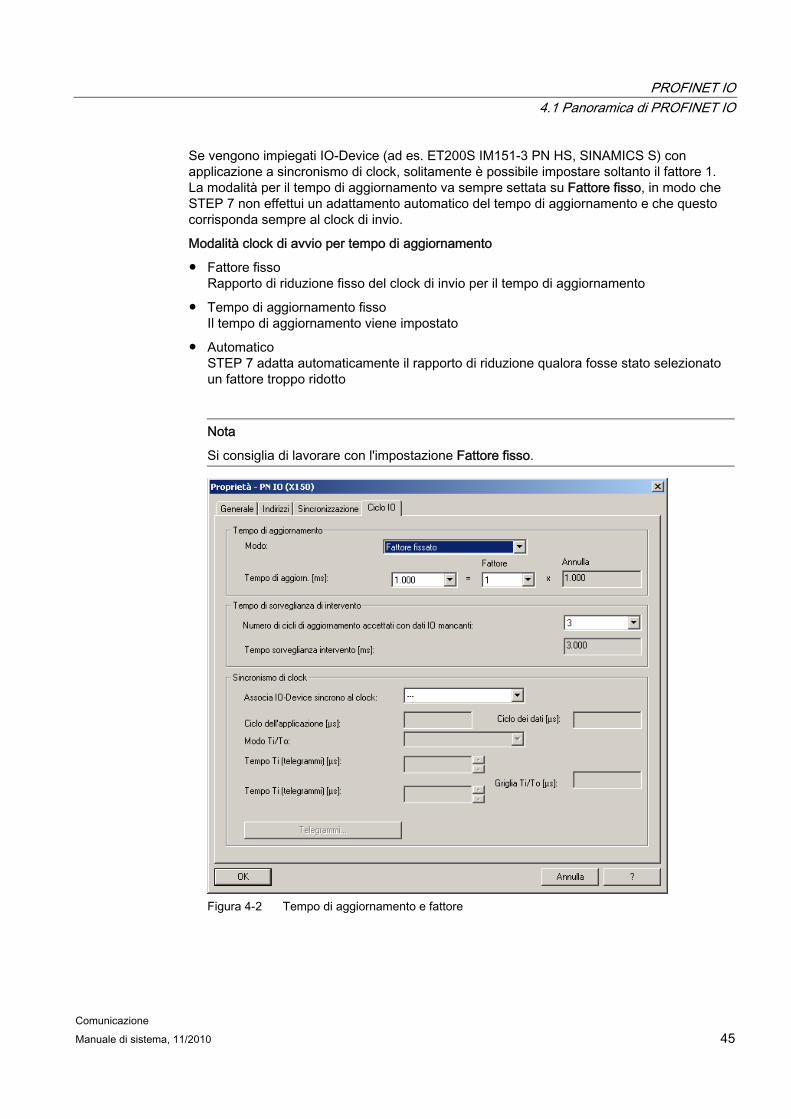
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione Manuale di sistema, 11/2010 45
Se vengono impiegati IO-Device (ad es. ET200S IM151-3 PN HS, SINAMICS S) con applicazione a sincronismo di clock, solitamente è possibile impostare soltanto il fattore 1. La modalità per il tempo di aggiornamento va sempre settata su Fattore fisso, in modo che STEP 7 non effettui un adattamento automatico del tempo di aggiornamento e che questo corrisponda sempre al clock di invio.
Modalità clock di avvio per tempo di aggiornamento
● Fattore fisso Rapporto di riduzione fisso del clock di invio per il tempo di aggiornamento
● Tempo di aggiornamento fisso Il tempo di aggiornamento viene impostato
● Automatico STEP 7 adatta automaticamente il rapporto di riduzione qualora fosse stato selezionato un fattore troppo ridotto
Nota
Si consiglia di lavorare con l'impostazione Fattore fisso.
Figura 4-2 Tempo di aggiornamento e fattore
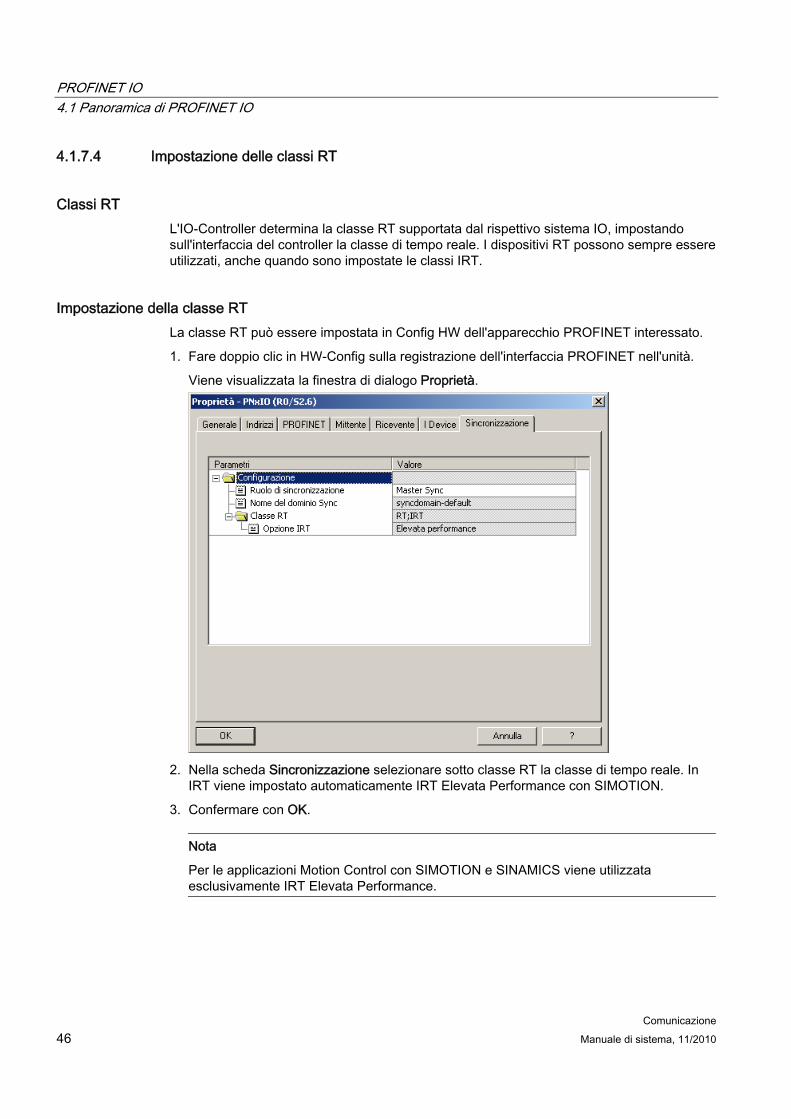
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione 46 Manuale di sistema, 11/2010
4.1.7.4 Impostazione delle classi RT
Classi RT L'IO-Controller determina la classe RT supportata dal rispettivo sistema IO, impostando sull'interfaccia del controller la classe di tempo reale. I dispositivi RT possono sempre essere utilizzati, anche quando sono impostate le classi IRT.
Impostazione della classe RT La classe RT può essere impostata in Config HW dell'apparecchio PROFINET interessato.
1. Fare doppio clic in HW-Config sulla registrazione dell'interfaccia PROFINET nell'unità.
Viene visualizzata la finestra di dialogo Proprietà.
2. Nella scheda Sincronizzazione selezionare sotto classe RT la classe di tempo reale. In
IRT viene impostato automaticamente IRT Elevata Performance con SIMOTION.
3. Confermare con OK.
Nota
Per le applicazioni Motion Control con SIMOTION e SINAMICS viene utilizzata esclusivamente IRT Elevata Performance.
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione Manuale di sistema, 11/2010 47
4.1.7.5 PROFINET IO con RT PROFINET IO con RT è la soluzione ottimale per l'integrazione di sistemi di periferia senza requisiti particolari in termini di prestazioni e di sincronismo di clock. Si tratta di una soluzione basata su Ethernet standard IC (controller Ethernet) per apparecchi e Industrial Switch standard utilizzati come componenti dell'infrastruttura. Non è necessario un supporto hardware particolare.
Non a sincronismo di clock Ethernet standard e PROFINET IO con RT non offrono meccanismi di sincronizzazione per gli apparecchi, ma neppure impediscono questa possibilità. Non sono quindi possibili nè una trasmissione dei dati con sincronismo di clock, nè un'applicazione a sincronismo di clock per Motion Control.
Scambio dati La comunicazione tramite PROFINET IO con RT e IRT si basa su frame Ethernet e indirizzo MAC. Pertanto una comunicazione con RT e IRT tramite router a livello dell'intera rete non è possibile. Ai telegrammi PROFINET IO viene assegnata la priorità in conformità alla norma IEEE802.1Q relativa ai telegrammi IT. Questo soddisfa le caratteristiche in tempo reale necessarie per la tecnica di automazione, ad es. per IO standard.
Tempo di aggiornamento Il tempo di aggiornamento impostabile si trova nel campo 0,25 - 512 ms. Il tempo di aggiornamento scelto dipende dai requisiti di processo, dal numero di apparecchi e dal numero di dati IO. In seguito all'aumento della prestazione dei bus di campo in PROFINET, di solito il ciclo del bus non è più la grandezza determinante per il ciclo del sistema.
4.1.7.6 PROFINET IO con IRT - Panoramica
Descrizione Con PROFINET IO con IRT vengono soddisfatti i requisiti di comunicazione previsti per i segnali standard. Con IRT l'eventuale jitter che ancora caratterizza la comunicazione in RT viene notevolmente ridotto tramite la sincronizzazione della rete.
A tale scopo alla rete Ethernet viene sovraordinata una procedura a tempo. Vengono riservati un lasso di tempo per i telegrammi IRT e uno per quelli basati su RT e IP. Il presupposto per tale procedura è il sincronismo di tutti gli apparecchi coinvolti nella comunicazione IRT.
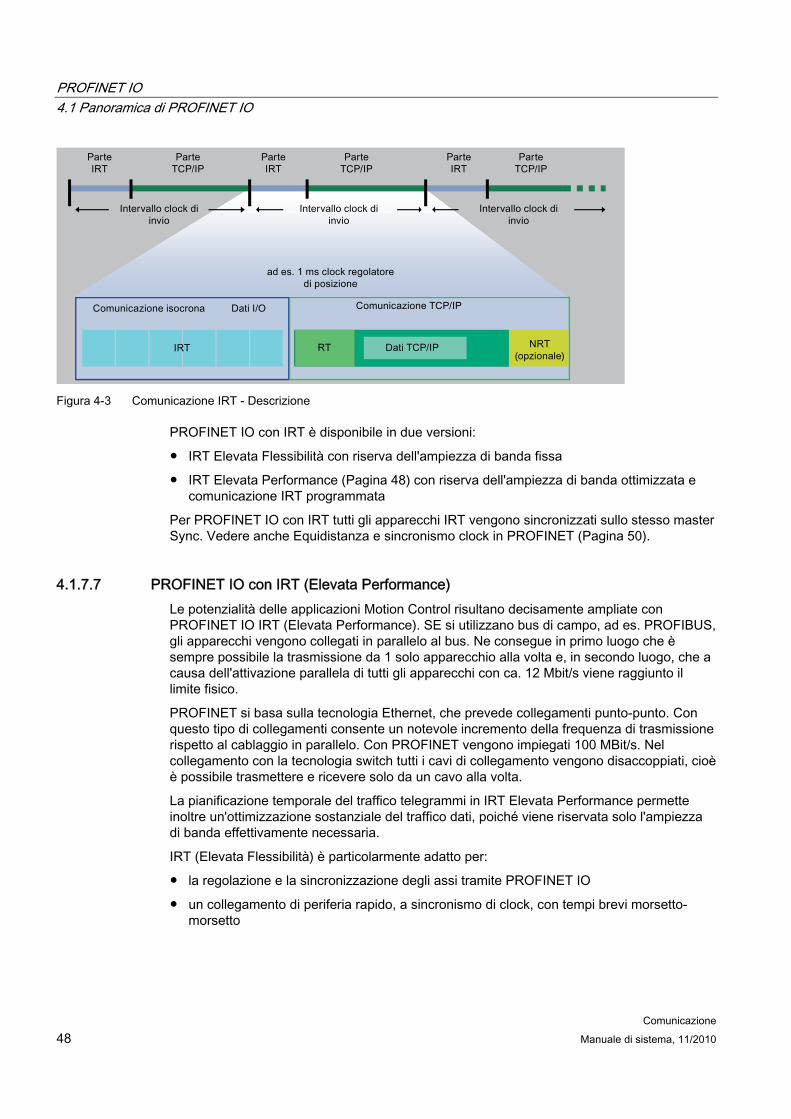
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione 48 Manuale di sistema, 11/2010
Figura 4-3 Comunicazione IRT - Descrizione
PROFINET IO con IRT è disponibile in due versioni:
● IRT Elevata Flessibilità con riserva dell'ampiezza di banda fissa
● IRT Elevata Performance (Pagina 48) con riserva dell'ampiezza di banda ottimizzata e comunicazione IRT programmata
Per PROFINET IO con IRT tutti gli apparecchi IRT vengono sincronizzati sullo stesso master Sync. Vedere anche Equidistanza e sincronismo clock in PROFINET (Pagina 50).
4.1.7.7 PROFINET IO con IRT (Elevata Performance) Le potenzialità delle applicazioni Motion Control risultano decisamente ampliate con PROFINET IO IRT (Elevata Performance). SE si utilizzano bus di campo, ad es. PROFIBUS, gli apparecchi vengono collegati in parallelo al bus. Ne consegue in primo luogo che è sempre possibile la trasmissione da 1 solo apparecchio alla volta e, in secondo luogo, che a causa dell'attivazione parallela di tutti gli apparecchi con ca. 12 Mbit/s viene raggiunto il limite fisico.
PROFINET si basa sulla tecnologia Ethernet, che prevede collegamenti punto-punto. Con questo tipo di collegamenti consente un notevole incremento della frequenza di trasmissione rispetto al cablaggio in parallelo. Con PROFINET vengono impiegati 100 MBit/s. Nel collegamento con la tecnologia switch tutti i cavi di collegamento vengono disaccoppiati, cioè è possibile trasmettere e ricevere solo da un cavo alla volta.
La pianificazione temporale del traffico telegrammi in IRT Elevata Performance permette inoltre un'ottimizzazione sostanziale del traffico dati, poiché viene riservata solo l'ampiezza di banda effettivamente necessaria.
IRT (Elevata Flessibilità) è particolarmente adatto per:
● la regolazione e la sincronizzazione degli assi tramite PROFINET IO
● un collegamento di periferia rapido, a sincronismo di clock, con tempi brevi morsetto-morsetto
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione Manuale di sistema, 11/2010 49
Clock di invio Il clock di invio in PROFINET IRT Elevata Performance si può impostare da 250 µs a 4 ms. Nel funzionamento combinato RT e IRT Elevata Performance si possono impostare solo i valori 0,5, 1,0, 2,0 o 4,0.
Il clock di invio effettivamente utilizzato dipende da vari fattori:
● il processo, in quanto la comunicazione dovrebbe avvenire solo con la velocità effettivamente necessaria; ciò riduce il carico del bus e quello della CPU
● il carico del bus (numero di apparecchi e di dati IO per ogni apparecchio)
● la potenza di calcolo a disposizione nel controllo
● i clock di invio supportati negli apparecchi PROFINET inclusi in un dominio Sync.
Un clock di invio tipico, ad es., è 1 ms; questo valore può tuttavia essere impostato in una griglia di 125 µs nei limiti di 250 µs - 4 ms. Vedere anche Clock di invio e tempi di aggiornamento impostabili (Pagina 44).
Per i clock di invio supportati, consultare i corrispondenti manuali dei rispettivi apparecchi SIMOTION. Un tempo di ciclo minimo di 250 µs viene supportato solo da componenti selezionati (SIMOTION P320-3, P350-3, D445-2 DP/PN, D455-2 DP/PN e le unità ET 200S HS).
Applicazione a sincronismo di clock La trasmissione dei dati a sincronismo di clock e un'applicazione sincronizzata sul sistema bus soddisfano i requisiti per applicazioni Motion Control complesse. In questo modo si possono collegare circuiti di regolazione tramite il sistema bus e ottenere tempi di reazione minimi garantiti (relazione di tempo morsetto-morsetto). Inoltre viene garantito un collegamento efficiente e a sincronismo di clock all'applicazione con carico più ridotto sulla CPU dell'applicazione.
Contrariamente a quanto avviene per Standard-Ethernet e PROFINET IO con RT, i tempi di trasmissione dei telegrammi in PROFINET IO con IRT Elevata Performance sono pianificati.
Trasmissione dati a pianificazione temporale Per pianificazione temporale si intende la definizione del percorso di comunicazione e degli istanti esatti di trasmissione relativi ai dati da trasmettere. La pianificazione della comunicazione permette di sfruttare l'ampiezza di banda in modo ottimale e di ottenere quindi le migliori prestazioni possibili. A tale scopo è necessario progettare la topologia della rete; dalla topologia progettata il sistema di engineering calcola quindi automaticamente la pianificazione della comunicazione (vedere anche Topologia). I dati rilevanti per PROFINET IO vengono trasmessi tramite un download di Config HW nell'IO-Controller. La definizione temporale degli istanti di trasmissione consente di ottenere la qualità più elevata per quanto riguarda il determinismo, caratteristica particolarmente vantaggiosa per il collegamento di un'applicazione a sincronismo di clock.
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione 50 Manuale di sistema, 11/2010
Scambio dati Tuttavia, PROFINET IO con Elevata Performance e PROFINET IO con Elevata Flessibilità funzionano solo entro un dominio Sync. Questi non possono però essere combinati in un sistema IO. Ciò significa che un dominio Sync può essere formato da 2 o più sistemi IO che possono essere sincronizzati fra loro. All'interno del sistema IO viene quindi utilizzato o IRT Elevata flessibilità o IRT Elevata Performance.
4.1.8 Dominio Sync Un dominio Sync è un gruppo di apparecchi PROFINET, sincronizzati su un clock comune. Il master Sync imposta il clock. Lo slave Sync si sincronizza sul clock impostato dal master Sync. Un dominio Sync presenta un master Sync.
Vedere anche Creazione dominio Sync (Pagina 89)
4.1.9 Equidistanza e sincronismo clock in PROFINET
Descrizione PROFINET IO con IRT si basa su Ethernet con procedura a tempo sovraordinata. A tale proposito la sincronizzazione di tutti i collegamenti bus che partecipano alla comunicazione costituisce un presupposto. In PROFINET IO con IRT Elevata Performance e IRT Elevata Flessibilità un master Sync trasmette un telegramma di sincronizzazione al quale si sincronizzano tutti gli slave Sync.
Master Sync, slave Sync e dominio Sync I ruoli degli apparecchi master Sync e slave Sync vengono assegnati durante la progettazione. Il ruolo di un master Sync può essere assegnato solo a un IO-Controller o switch IRT SCALANCE 200.
Un dominio Sync può essere composto da apparecchi PROFINET con IRT Elevata Performance e apparecchi PROFINET con IRT Elevata Flessibilità. Sulle estremità (linee semplici) possono essere presenti anche apparecchi PROFINET con RT, ma non tra due apparecchi con PROFINET IO con IRT (Elevata Flessibilità o Elevata Performance).
Su una linea (rete) non è possibile combinare IRT Elevata flessibilità o IRT Elevata Performance, poiché queste devono essere sempre collegate direttamente tra loro.
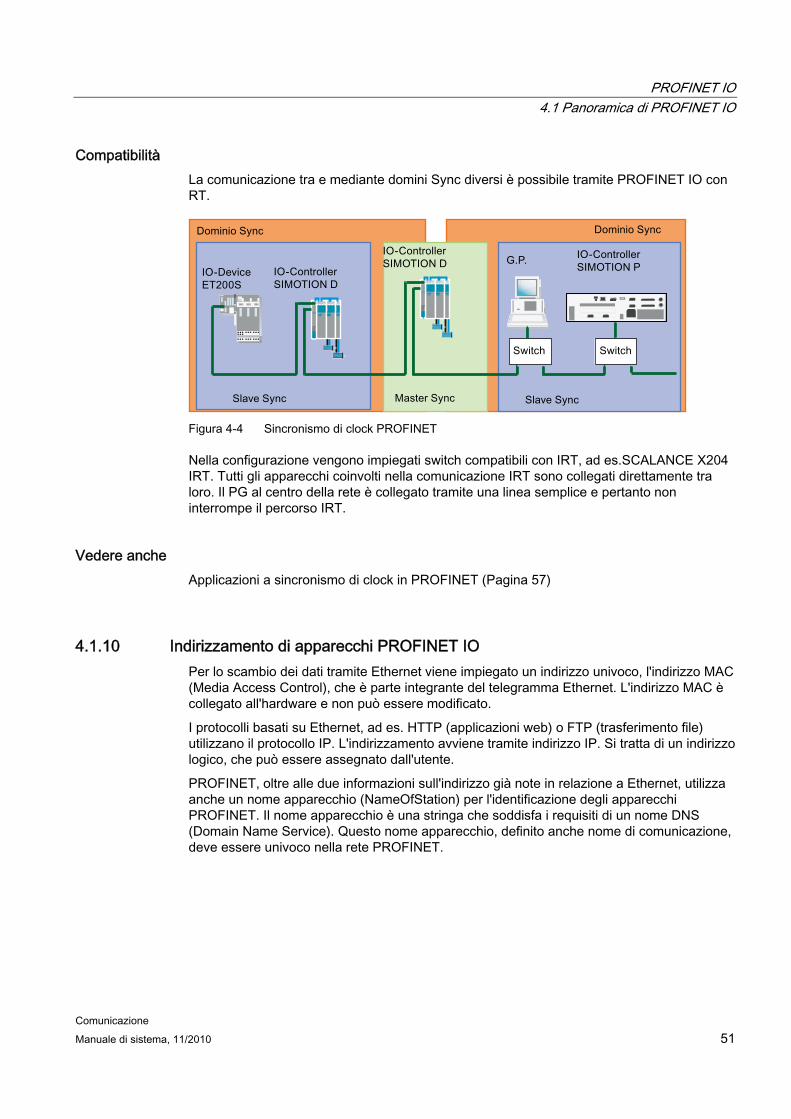
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione Manuale di sistema, 11/2010 51
Compatibilità La comunicazione tra e mediante domini Sync diversi è possibile tramite PROFINET IO con RT.
Figura 4-4 Sincronismo di clock PROFINET
Nella configurazione vengono impiegati switch compatibili con IRT, ad es.SCALANCE X204 IRT. Tutti gli apparecchi coinvolti nella comunicazione IRT sono collegati direttamente tra loro. Il PG al centro della rete è collegato tramite una linea semplice e pertanto non interrompe il percorso IRT.
Vedere anche Applicazioni a sincronismo di clock in PROFINET (Pagina 57)
4.1.10 Indirizzamento di apparecchi PROFINET IO Per lo scambio dei dati tramite Ethernet viene impiegato un indirizzo univoco, l'indirizzo MAC (Media Access Control), che è parte integrante del telegramma Ethernet. L'indirizzo MAC è collegato all'hardware e non può essere modificato.
I protocolli basati su Ethernet, ad es. HTTP (applicazioni web) o FTP (trasferimento file) utilizzano il protocollo IP. L'indirizzamento avviene tramite indirizzo IP. Si tratta di un indirizzo logico, che può essere assegnato dall'utente.
PROFINET, oltre alle due informazioni sull'indirizzo già note in relazione a Ethernet, utilizza anche un nome apparecchio (NameOfStation) per l'identificazione degli apparecchi PROFINET. Il nome apparecchio è una stringa che soddisfa i requisiti di un nome DNS (Domain Name Service). Questo nome apparecchio, definito anche nome di comunicazione, deve essere univoco nella rete PROFINET.
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione 52 Manuale di sistema, 11/2010
Nella fase della messa in servizio a ogni apparecchio PROFINET (identificato tramite indirizzo MAC) viene assegnato una volta un nome apparecchio tramite lo strumento di progettazione; questo nome viene quindi salvato in modo permanente nell'apparecchio PROFINET (cosiddetto "battesimo dei nodi"). Il nome apparecchio viene impiegato per riferirsi all'apparecchio nella progettazione. Se un apparecchio viene sostituito, ad es. a causa di un guasto, al nuovo apparecchio viene assegnato un altro indirizzo MAC. Se gli viene assegnato il nome dell'apparecchio sostituito (ad es. tramite reinserimento di un supporto di sostituzione che memorizza in modo permanente il nome apparecchio), può assumere la funzione svolta nella progettazione dall'apparecchio sostituito senza necessità di modifiche.
In alternativa l'assegnazione del nome ai Device può essere effettuata automaticamente dal controller sulla base delle informazioni sulla topologia. A tale scopo è necessario memorizzare nel sistema di engineering informazioni sulla topologia (chi è collegato a chi e come). All'avvio il controller identifica i Device collegati tramite i nomi apparecchio e assegna loro l'indirizzo IP definito nel sistema di engineering. In questo modo la stazione è raggiungibile tramite servizi IP. L'indirizzo IP si può ricavare da una gamma di numeri progettata oppure può essere progettato individualmente.
Un apparecchio PROFINET ha i seguenti indirizzi tramite i quali può essere richiamato:
● Indirizzo MAC (parte integrante del telegramma Ethernet, viene salvato sull'apparecchio e non è modificabile)
● Indirizzo IP (comunicazione basata su IP, ad. es. accessi engineering, deve essere assegnato a tutti gli apparecchi)
● Nomi apparecchio, nomi di comunicazione (identificazione degli apparecchi all'avvio da parte del controller)
Vedere anche Assegnazione di nomi apparecchio e indirizzi IP per IO-Device (Pagina 108)
4.1.11 Pianificazione e topologia per una rete PROFINET
Linee guida per la pianificazione Per la creazione di una rete PROFINET occorre chiarire prima della realizzazione domande fondamentali. Questo capitolo presenta linee guida generali a supporto della definizione dei requisiti e della creazione della documentazione di pianificazione. La pianificazione è un processo iterativo, ciò significa che alcuni requisiti si influenzano vicendevolmente determinando pertanto modifiche nella pianificazione totale.
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione Manuale di sistema, 11/2010 53
Contenuto della documentazione di pianificazione Dopo aver determinato i requisiti al termine del processo di pianificazione devono essere presenti le seguenti informazioni:
● Configurazione dell'impianto
● Topologia
● Selezione dei componenti
● Selezione del supporto di trasmissione
● Selezione dei connettori
● Rapporti di comunicazione
● Stime relative alla quantità di dati da trasferire
Preconsiderazioni e analisi durante la pianificazione 1. Selezione degli apparecchi
Creare una lista degli apparecchi. La selezione degli apparecchi avviene tra l'altro in base alla classe di applicazione (Conformance Class), ai requisiti di tempo e di comunicazione, alla funzione nonché agli influssi ambientali e al tipo di protezione.
2. Posizione degli apparecchi nella macchina
Dalla posizione degli apparecchi nella macchina emergono le relazioni relative al grado di protezione, all'EMC; alle dimensioni degli apparecchi e ai cavi utilizzati, ad es. cavi a fibre ottiche anziché cavi in rame. Questo influenza a sua volta la selezione degli apparecchi.
3. Definizione delle proprietà di comunicazione
Occorre definire i requisiti di tempo relativi all'applicazione (sincrono al clock/ciclico) e alla comunicazione tramite PROFINET, ovvero se la comunicazione avviene in tempo reale (IRT/RT) o aciclicamente tramite TCP/IP o UDP/IP.
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione 54 Manuale di sistema, 11/2010
4. Pianificazione della rete (topologia)
Stabilire la topologia (anello, stella, linea) della rete. A seconda della topologia occorre considerare gli switch (compatibili con IRT), l'EMC, l'estensione della rete, il WLAN (nessun IRT possibile) e l'eventuale ridondanza dei supporti MRP (non possibile con SIMOTION/SINAMICS).
– Configurare il sistema PROFINET a stella nei casi in cui questa struttura si riveli logica (ad. es.: dopo una CPU collegata tramite switch rinunciare a una topologia a stella).
– Per PROFINET con IRT è consentita la creazione di una linea con 64 apparecchi IRT. Le dipendenze sono costituite dalle quantità di dati trasmessi. Se per un Device vengono progettate lunghezze di telegrammi maggiori, il possibile numero per ogni linea può diminuire. Ciò viene riconosciuto tempestivamente al momento della progettazione con Config HW e viene segnalato con un messaggio di errore. I 64 apparecchi IRT nella linea valgono solo per PROFINET secondo V2.2.
– Mantenere ridotta la profondità di concatenamento degli switch. Ciò consente di ridurre il worst case jitter per la comunicazione RT. Per IRT Elevata Flessibilità il fabbisogno di ampiezza di banda definito dal sistema di engineering viene ridotto.
Topologia A stella Collegando i partner della comunicazione a uno
switch viene automaticamente creata una topologia di rete con struttura a stella. Con questa struttura, contrariamente ad altre, non viene a mancare l'intera rete se si guasta un singolo apparecchio PROFINET. Soltanto il guasto di uno switch comporta il guasto degli apparecchi collegati.
Ad albero Interconnettendo diverse strutture a stella viene creata una topologia di rete con struttura ad albero.
In linea Tutti i nodi della comunicazione vengono collegati l'uno dopo l'altro in una linea. Se uno switch è guasto, non è più realizzabile la comunicazione tramite lo stesso. Per la realizzazione di una struttura lineare devono essere utilizzati apparecchi con uno switch a due porte. La struttura di rete lineare è quella che comporta il cablaggio più semplice.
5. Definizione dei rapporti di comunicazione (assegnazione logica dei partner)
Determinare quali partner di comunicazione sono in collegamento e com'è l'assegnazione spaziale e/o funzionale di tali partner.
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione Manuale di sistema, 11/2010 55
6. Definizione della quantità di dati.
Definire la possibile quantità di dati dei nodi della rete e in quali punti dei nodi di comunicazione.
Nota
All'interno di una rete PROFINET la rapidità della comunicazione deve dipendere dalle necessità tecnologiche dell'impianto e dalla possibilità tecnica.
7. Definizione del clock di invio e del tempo di aggiornamento
Il clock di invio si orienta verso l'apparecchio PROFINET che necessita dell'aggiornamento superiore. Il tempo di aggiornamento è un multiplo del clock di invio e determina il carico di rete PROFINET. Il carico di rete creato da PROFINET dovrebbe continuare a trovarsi sotto il 50% per disporre di riserve per carichi di picco. Osservare che il carico di rete PROFINET cresce in modo lineare rispetto al numero degli apparecchi PROFINET e del clock di invio.
Nota
Progettare pertanto i tempi di aggiornamento nel modo richiesto dal processo, anche se il sistema bus consente tempi di aggiornamenti molto più piccoli. Ciò riduce il carico di rete PROFINET e il carico del controller PROFINET su una misura necessaria.
8. Verifica del carico di rete
Per determinare il carico di rete occorre osservare il carico di rete PROFINET così come anche il carico di rete tramite apparecchi Standard Ethernet coinvolti. Questi possono essere ad es. videocamere per la sorveglianza dell'impianto o server dati per i dati di produzione. Gli apparecchi Ethernet con accumulo di dati ridotto come ad es. stazioni di lavoro di engineering o HMI sono normalmente non critici. Affinché il flusso dati PROFINET RT non venga inficiato si dovrebbe eventualmente adattare la topologia della rete, se si attendono elevati carichi di rete dai nodi Ethernet. Considerare però anche una sufficiente riserva di larghezza di banda per ampliamenti futuri.
Nota
Nella misura del possibile è necessario separare gli apparecchi con un carico IP elevato in uno stesso settore della rete. Si tratta, ad es., di server di diagnostica o server HMI.
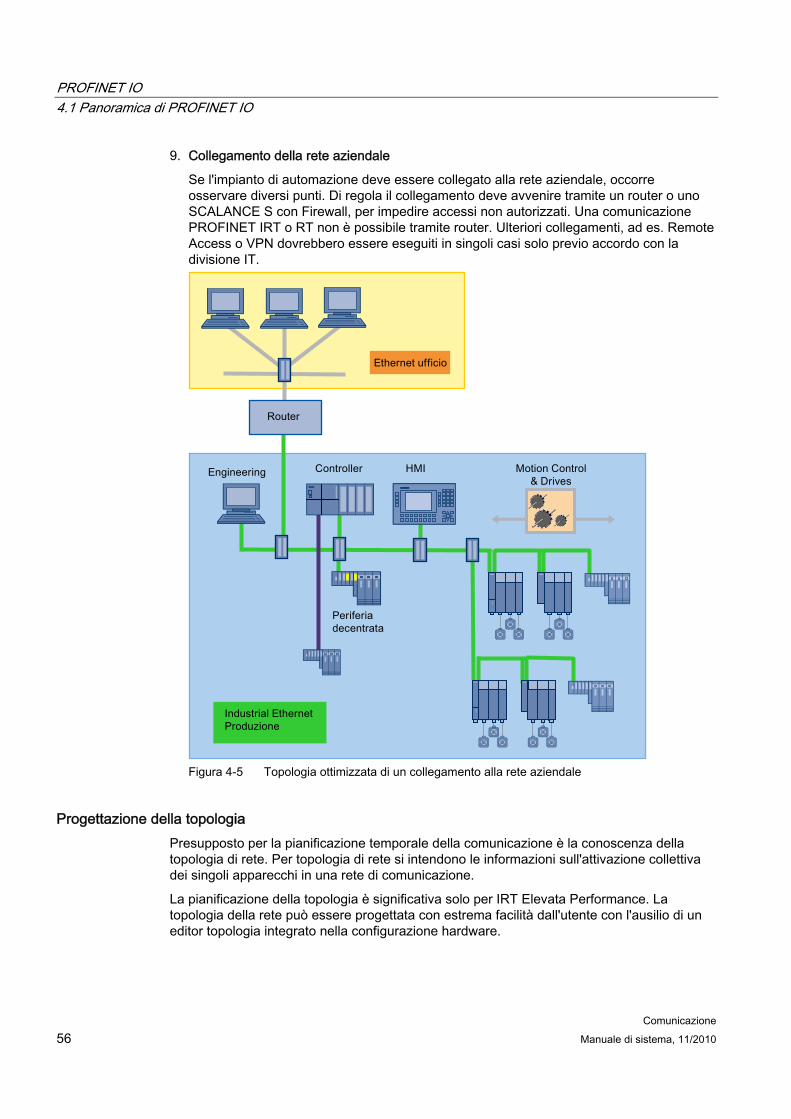
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione 56 Manuale di sistema, 11/2010
9. Collegamento della rete aziendale
Se l'impianto di automazione deve essere collegato alla rete aziendale, occorre osservare diversi punti. Di regola il collegamento deve avvenire tramite un router o uno SCALANCE S con Firewall, per impedire accessi non autorizzati. Una comunicazione PROFINET IRT o RT non è possibile tramite router. Ulteriori collegamenti, ad es. Remote Access o VPN dovrebbero essere eseguiti in singoli casi solo previo accordo con la divisione IT.
Figura 4-5 Topologia ottimizzata di un collegamento alla rete aziendale
Progettazione della topologia Presupposto per la pianificazione temporale della comunicazione è la conoscenza della topologia di rete. Per topologia di rete si intendono le informazioni sull'attivazione collettiva dei singoli apparecchi in una rete di comunicazione.
La pianificazione della topologia è significativa solo per IRT Elevata Performance. La topologia della rete può essere progettata con estrema facilità dall'utente con l'ausilio di un editor topologia integrato nella configurazione hardware.
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione Manuale di sistema, 11/2010 57
4.1.12 Applicazioni a sincronismo di clock in PROFINET Come accade con PROFIBUS, anche con PROFINET IO con IRT Elevata Performance l'applicazione può essere sincronizzata sul clock della rete di trasmissione. La sincronizzazione di tutti gli apparecchi PROFINET con IRT Elevata Performance su una stessa base temporale costituisce il presupposto per la realizzazioni di applicazioni Motion Control distribuite e per tempi di reazione morsetto/morsetto inferiori a un millisecondo.
Nota
Il sincronismo di clock dell'applicazione rispetto al bus è possibile solo con PROFINET IO con IRT Elevata Performance.
Modello di progettazione sincronismo di clock a partire da V4.2 Il modello di progettazione del sincroniscmo di clock è stato modificato rispetto a V4.2. La scheda Applicazione è stata sostituita con impostazioni sul controller e nella scheda ciclo IO del device IO nelle proprietà del device IO. Un procedimento più approfondito sull'impostazione nelle applicazioni sincrone al clock è presente nel capitoloInserimento e progettazione di SINAMICS S120 (Pagina 102)
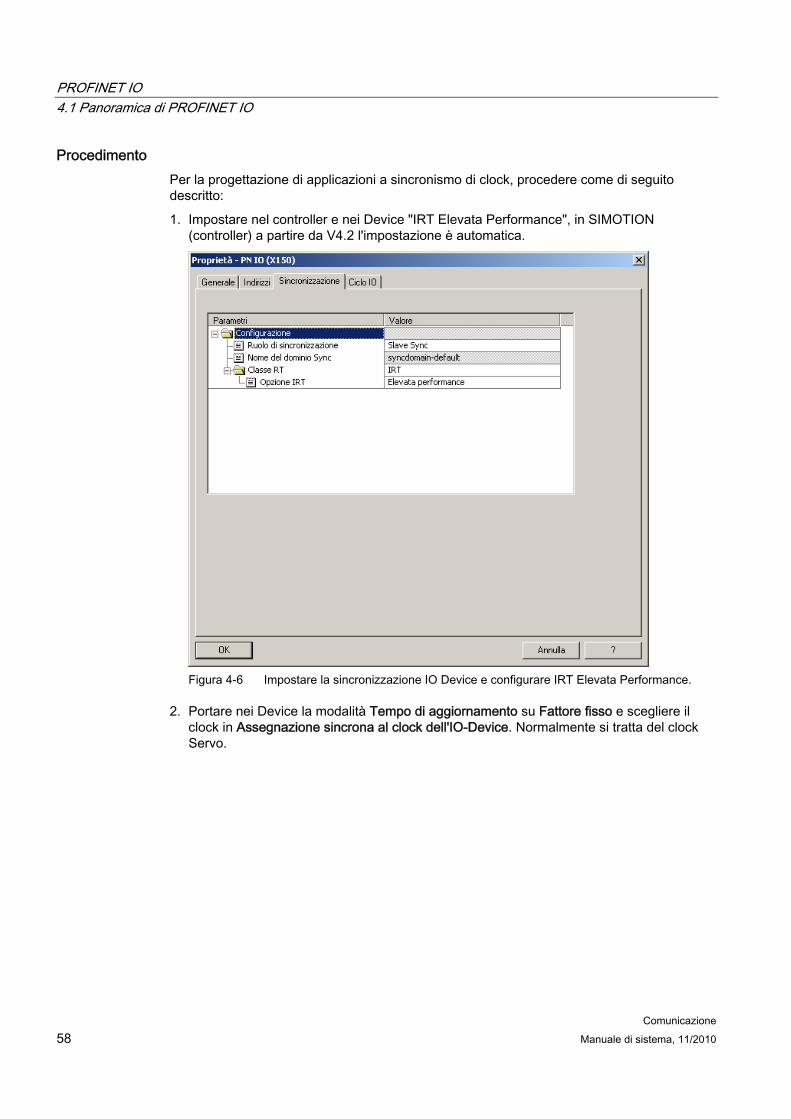
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione 58 Manuale di sistema, 11/2010
Procedimento Per la progettazione di applicazioni a sincronismo di clock, procedere come di seguito descritto:
1. Impostare nel controller e nei Device "IRT Elevata Performance", in SIMOTION (controller) a partire da V4.2 l'impostazione è automatica.
Figura 4-6 Impostare la sincronizzazione IO Device e configurare IRT Elevata Performance.
2. Portare nei Device la modalità Tempo di aggiornamento su Fattore fisso e scegliere il clock in Assegnazione sincrona al clock dell'IO-Device. Normalmente si tratta del clock Servo.
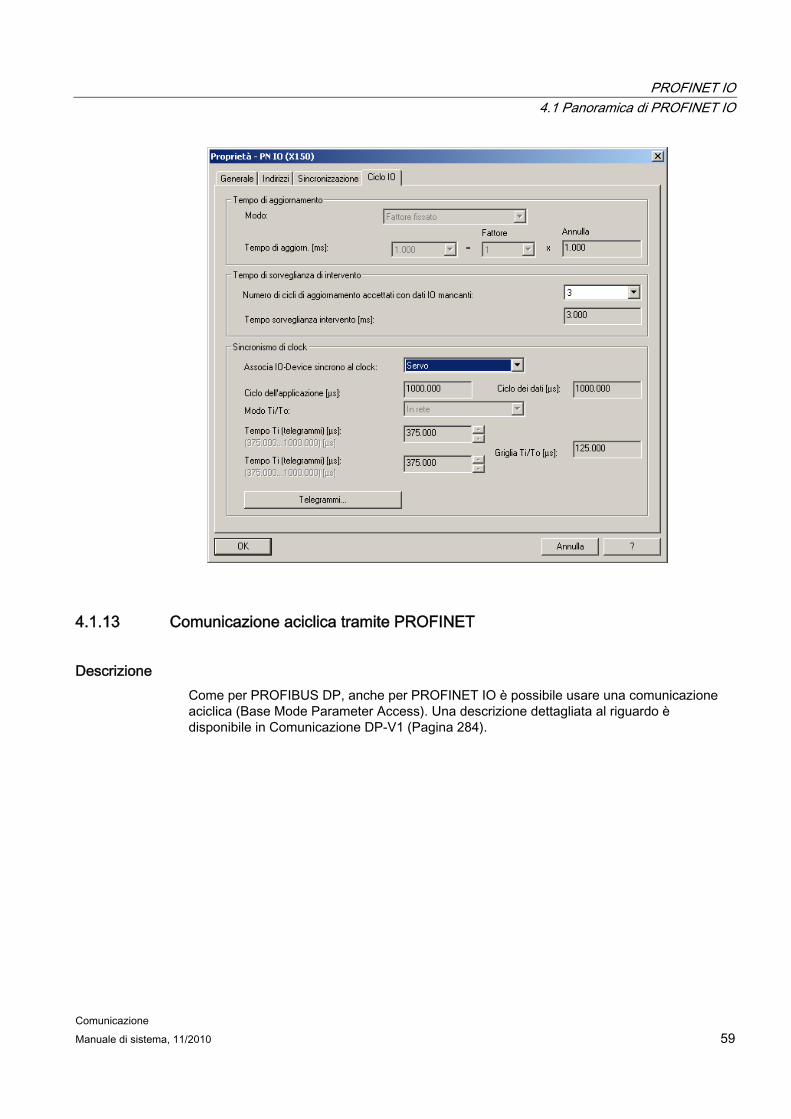
PROFINET IO 4.1 Panoramica di PROFINET IO
Comunicazione Manuale di sistema, 11/2010 59
4.1.13 Comunicazione aciclica tramite PROFINET
Descrizione Come per PROFIBUS DP, anche per PROFINET IO è possibile usare una comunicazione aciclica (Base Mode Parameter Access). Una descrizione dettagliata al riguardo è disponibile in Comunicazione DP-V1 (Pagina 284).
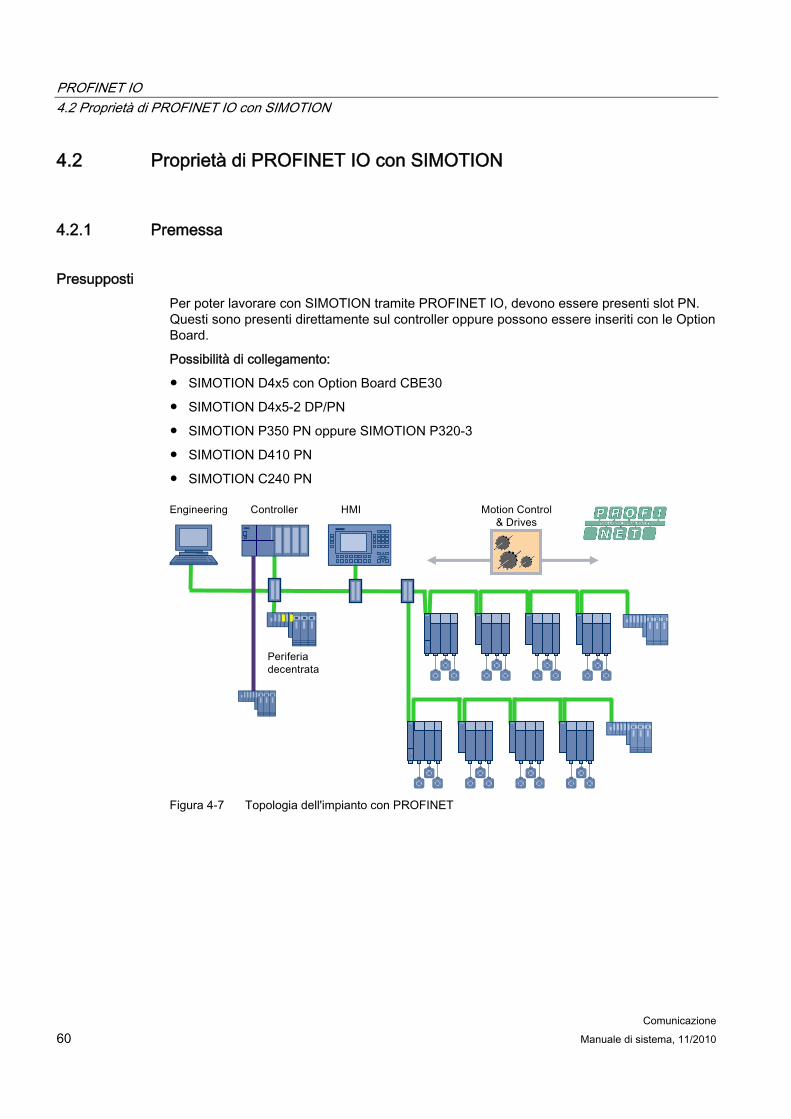
PROFINET IO 4.2 Proprietà di PROFINET IO con SIMOTION
Comunicazione 60 Manuale di sistema, 11/2010
4.2 Proprietà di PROFINET IO con SIMOTION
4.2.1 Premessa
Presupposti Per poter lavorare con SIMOTION tramite PROFINET IO, devono essere presenti slot PN. Questi sono presenti direttamente sul controller oppure possono essere inseriti con le Option Board.
Possibilità di collegamento:
● SIMOTION D4x5 con Option Board CBE30
● SIMOTION D4x5-2 DP/PN
● SIMOTION P350 PN oppure SIMOTION P320-3
● SIMOTION D410 PN
● SIMOTION C240 PN
Figura 4-7 Topologia dell'impianto con PROFINET
PROFINET IO 4.2 Proprietà di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 61
Gli apparecchi PROFINET supportano il funzionamento contemporaneo di:
● IRT Elevata Performance - Isochronous Realtime Ethernet
– Funzionamento della periferica IRT (ad es. ET200S HS per IRT Elevata Performance)
– Funzionamento di un SINAMICS S120 come IO-Device
– Scambio di dati tra controller tramite IRT Elevata Performance (ad es. sincronismo distribuito)
● RT - Realtime Ethernet
– Funzionamento della periferica RT (ad es. ET 200S, ET 200pro)
– Link ASI tramite interfaccia IE/AS Link PN IO per l'accoppiamento tra reti PROFINET IO su interfaccia AS
– SINAMICS come PROFINET IO con apparecchio RT
● TCP/IP, UDP, HTTP, … servizi Ethernet standard
Nota
In caso di funzionamento combinato di IRT Elevata Performance occorre assicurarsi che gli apparecchi compatibili con IRT Elevata Performance siano collegati direttamente tra loro. Ciò significa che tra gli apparecchi IRT non deve essere collegato alcun apparecchio non compatibile con IRT.
Nota
Con SIMOTION SCOUT è possibile collegare ONLINE al massimo 10 nodi PROFINET contemporaneamente. Se è stato installato SIMATIC NET è possibile realizzare più di 10 collegamenti.
PROFINET V2.2 SIMOTION SCOUT supporta la versione PROFINET V2.2. Le versioni precedenti non vengono normalmente supportate nell'hardware e devono essere aggiornate.
Con l'aggiunta di apparecchi SIMOTION o azionamenti SINAMICS in SIMOTION SCOUT vengono aggiunte solo versioni PROFINET V2.2. Se si desidera progettare versioni precedenti, è necessario inserire l'hardware in modo esplicito in Config HW come PROFINET V2.1.
Nota
Tutti i nodi IRT devono soddisfare la norma PROFINET V2.2. Non sono consentite configurazioni combinate con versioni precedenti.
A livello standard l'hardware viene fornito come PROFINET V2.2. Per upgrade degli impianti attuali o downgrade dei nuovi hardware, contattare l'Assistenza Siemens.
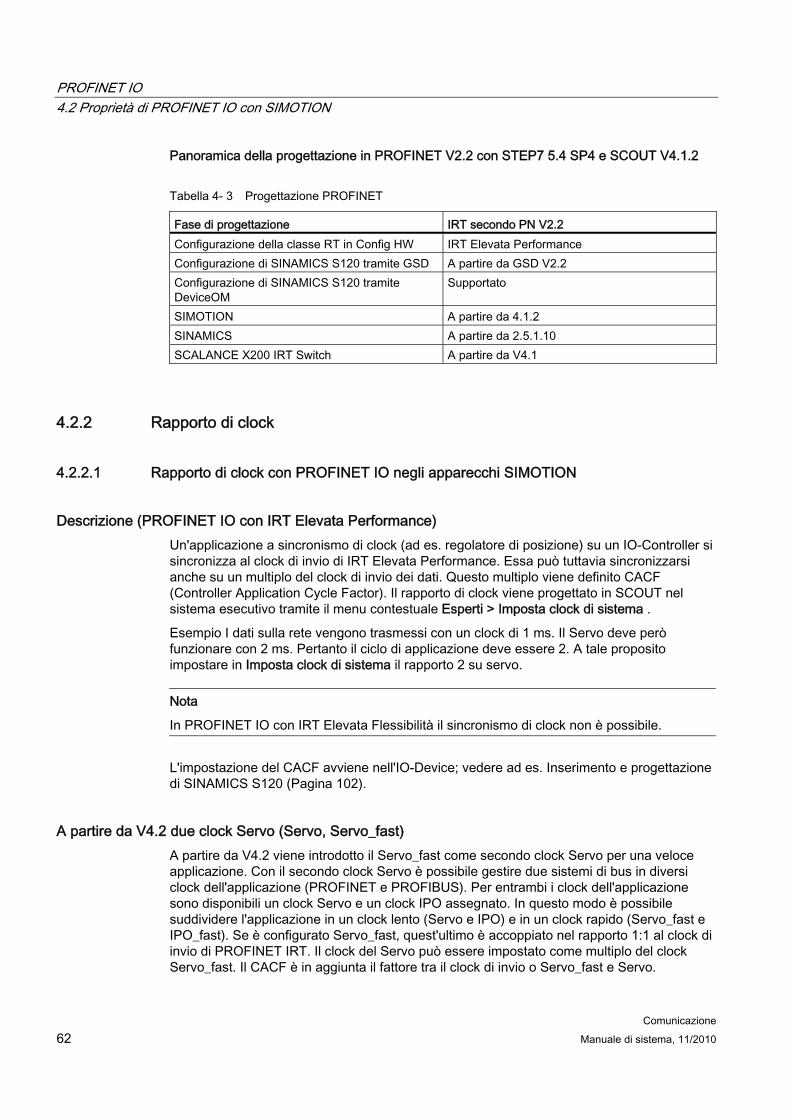
PROFINET IO 4.2 Proprietà di PROFINET IO con SIMOTION
Comunicazione 62 Manuale di sistema, 11/2010
Panoramica della progettazione in PROFINET V2.2 con STEP7 5.4 SP4 e SCOUT V4.1.2
Tabella 4- 3 Progettazione PROFINET
Fase di progettazione IRT secondo PN V2.2 Configurazione della classe RT in Config HW IRT Elevata Performance Configurazione di SINAMICS S120 tramite GSD A partire da GSD V2.2 Configurazione di SINAMICS S120 tramite DeviceOM
Supportato
SIMOTION A partire da 4.1.2 SINAMICS A partire da 2.5.1.10 SCALANCE X200 IRT Switch A partire da V4.1
4.2.2 Rapporto di clock
4.2.2.1 Rapporto di clock con PROFINET IO negli apparecchi SIMOTION
Descrizione (PROFINET IO con IRT Elevata Performance) Un'applicazione a sincronismo di clock (ad es. regolatore di posizione) su un IO-Controller si sincronizza al clock di invio di IRT Elevata Performance. Essa può tuttavia sincronizzarsi anche su un multiplo del clock di invio dei dati. Questo multiplo viene definito CACF (Controller Application Cycle Factor). Il rapporto di clock viene progettato in SCOUT nel sistema esecutivo tramite il menu contestuale Esperti > Imposta clock di sistema .
Esempio I dati sulla rete vengono trasmessi con un clock di 1 ms. Il Servo deve però funzionare con 2 ms. Pertanto il ciclo di applicazione deve essere 2. A tale proposito impostare in Imposta clock di sistema il rapporto 2 su servo.
Nota
In PROFINET IO con IRT Elevata Flessibilità il sincronismo di clock non è possibile.
L'impostazione del CACF avviene nell'IO-Device; vedere ad es. Inserimento e progettazione di SINAMICS S120 (Pagina 102).
A partire da V4.2 due clock Servo (Servo, Servo_fast) A partire da V4.2 viene introdotto il Servo_fast come secondo clock Servo per una veloce applicazione. Con il secondo clock Servo è possibile gestire due sistemi di bus in diversi clock dell'applicazione (PROFINET e PROFIBUS). Per entrambi i clock dell'applicazione sono disponibili un clock Servo e un clock IPO assegnato. In questo modo è possibile suddividere l'applicazione in un clock lento (Servo e IPO) e in un clock rapido (Servo_fast e IPO_fast). Se è configurato Servo_fast, quest'ultimo è accoppiato nel rapporto 1:1 al clock di invio di PROFINET IRT. Il clock del Servo può essere impostato come multiplo del clock Servo_fast. Il CACF è in aggiunta il fattore tra il clock di invio o Servo_fast e Servo.
PROFINET IO 4.2 Proprietà di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 63
Le funzioni descritte in seguito si riferiscono principalmente alla configurazione senza opzione del secondo Servo (Servo_fast).
Nota
Una descrizione dettagliata relativa all'opzione Servo_fast è presente nel Manuale SIMOTION SCOUT funzioni di basecapitolo 6.
Descrizione Un rapporto di riduzione al clock di invio con i controller SIMOTION è possibile con PROFINET e IRT Elevata Performance alle condizioni seguenti:
● Il SINAMICS Integrated di un D4xx e un'interfaccia master DP a sincronismo di clock funzionano sempre in modo uguale al clock Servo.
● Con un SIMOTION P350 l'interfaccia master DP a sincronismo di clock funziona sempre in modo uguale al clock Servo.
● Nel caso di un azionamento (ad es. S120) collegato tramite SINAMICS Integrated o come apparecchio di azionamento esterno, il clock Servo deve essere sempre calcolato nel primo clock di invio, cioè un rapporto di riduzione è possibile, ma il regolatore di posizione deve essere calcolato nell'ambito del clock di invio.
Le seguenti condizioni generali valgono per clock e rapporti di clock per un controller SIMOTION
● Se per un apparecchio SIMOTION è progettato IRT Elevata Performance, ma l'apparecchio SIMOTION stesso non trasmette né riceve dati IRT (ad es. solo router per dati IRT), il clock Servo non è sincronizzato sul clock di invio. Solo l'interfaccia PROFINET è sincronizzata sul clock di invio, ad es.
– Solo TCP/IP tramite interfaccia PROFINET
– Solo RT-Device nell'interfaccia PROFINET
– Interfaccia PROFINET solo router per dati IRT Elevata Performance verso altri apparecchi
Nota
Solo in caso di apparecchio SIMOTION che funge da master Sync l'apparecchio si sincronizza automaticamente sul bus sovraordinato. Se non è progettata alcuna interfaccia PROFIBUS DP dell'apparecchio SIMOTION come master DP sincrono al clock, anche gli slave Sync si sincronizzano automaticamente.
Se è configurata un'interfaccia PROFIBUS DP come master DP sincrono al clock per azionamenti subordinati, l'apparecchio deve essere sincronizzato per applicazione. Ciò viene programmato nel StartupTask tramite il comando _enabelDPInterfaceSynchronizationMode.
PROFINET IO 4.2 Proprietà di PROFINET IO con SIMOTION
Comunicazione 64 Manuale di sistema, 11/2010
Combinazioni di clock e sorgenti clock in PROFIBUS e PROFINET IO ● Servo può funzionare con rapporto di riduzione a multipli interi (1, 2, ...n) rispetto al clock
di invio.
● Se è configurato un Servo_fast, questo è impostato in maniera fissa nel rapporto 1:1 al clock in invio; CACF è impostabile come in precedenza come rapporto clock di invio/Servo_fast rispetto a Servo.
● I clock di SINAMICS Integrated e di un'interfaccia master DP a sincronismo di clock devono funzionare in modo identico al clock Servo.
4.2.2.2 Rapporto di riduzione clock per accessi alla periferia
Descrizione per la trasmissione di dati PROFINET IRT Per il rapporto di riduzione clock (PROFINET e PROFIBUS) occorre osservare quanto segue:
● I dati PROFINET IO IRT vengono sempre letti all'inizio del clock Servo e scritti alla fine del clock Servo.
● I dati PROFINET IO IRT vengono letti all'inizio del clock IPO o del clock IPO2 e scritti alla fine del clock IPO.
● Al termine di un IPOSynchronousTask, nel primo Servo disponibile, viene emessa l'immagine di processo (Data Out) (= tempo di reazione ottimizzato). In caso di rapporto di riduzione dal clock Servo al clock IPO (Servo < IPO) ciò può fare sì che, per accessi alla periferia tramite IPOSynchronousTask, i dati di uno o più clock Servo vengano prima o poi emessi all'interno di un clock IPO. Ciò si verifica se il runtime del clock IPO non è costante e pertanto in caso di clock Servo più rapido i dati vengono prima o poi trasmessi al bus.
● Al termine della sequenza Servo viene emessa l'immagine di processo di ServoSynchronousTask con il clock bus più prossimo (= tempo di reazione ottimizzato).
● Anche in caso di PROFINET e di rapporto di riduzione al clock PROFINET al clock Servo (PROFINET < Servo) i dati vengono emessi sempre nel primo clock PROFINET.
● In PROFIBUS i dati vengono sempre emessi con il primo clock bus, poiché il livello della sequenza Servo deve sempre essere chiuso con il primo clock bus. In caso di runtime differente della sequenza Servo nei singoli clock il tempo morsetto-morsetto può variare.
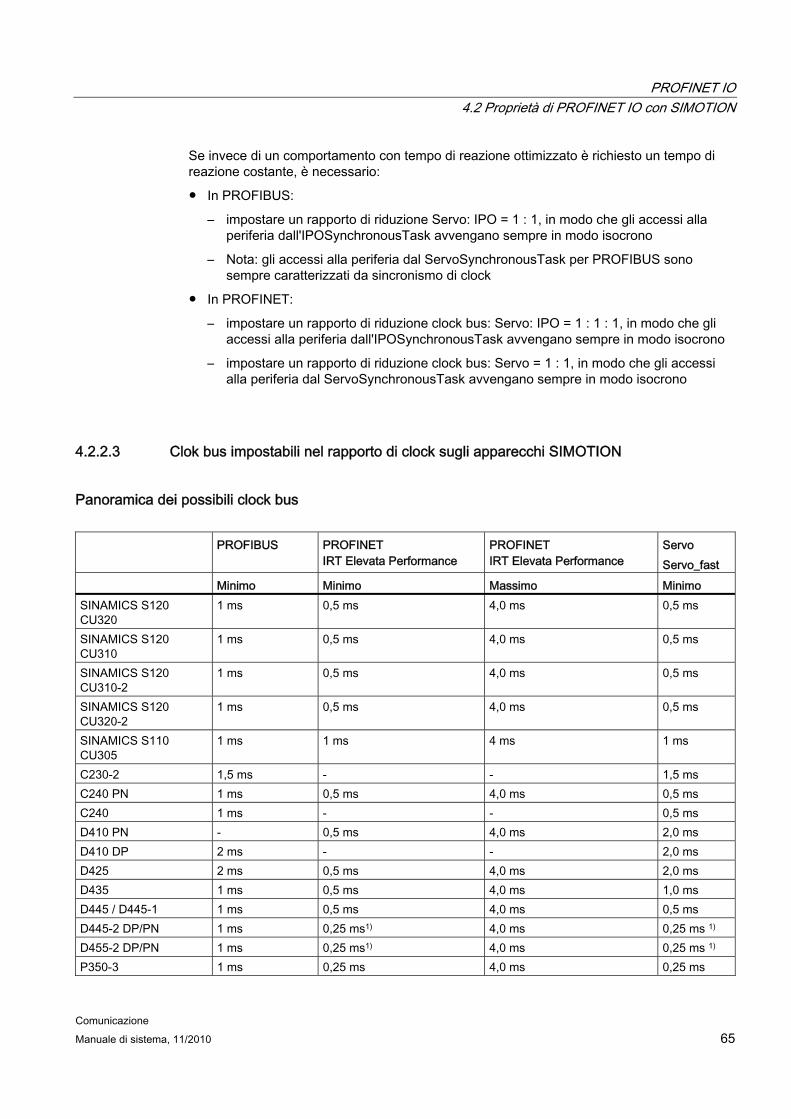
PROFINET IO 4.2 Proprietà di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 65
Se invece di un comportamento con tempo di reazione ottimizzato è richiesto un tempo di reazione costante, è necessario:
● In PROFIBUS:
– impostare un rapporto di riduzione Servo: IPO = 1 : 1, in modo che gli accessi alla periferia dall'IPOSynchronousTask avvengano sempre in modo isocrono
– Nota: gli accessi alla periferia dal ServoSynchronousTask per PROFIBUS sono sempre caratterizzati da sincronismo di clock
● In PROFINET:
– impostare un rapporto di riduzione clock bus: Servo: IPO = 1 : 1 : 1, in modo che gli accessi alla periferia dall'IPOSynchronousTask avvengano sempre in modo isocrono
– impostare un rapporto di riduzione clock bus: Servo = 1 : 1, in modo che gli accessi alla periferia dal ServoSynchronousTask avvengano sempre in modo isocrono
4.2.2.3 Clok bus impostabili nel rapporto di clock sugli apparecchi SIMOTION
Panoramica dei possibili clock bus PROFIBUS PROFINET
IRT Elevata Performance PROFINET IRT Elevata Performance
Servo Servo_fast
Minimo Minimo Massimo Minimo SINAMICS S120 CU320
1 ms 0,5 ms 4,0 ms 0,5 ms
SINAMICS S120 CU310
1 ms 0,5 ms 4,0 ms 0,5 ms
SINAMICS S120 CU310-2
1 ms 0,5 ms 4,0 ms 0,5 ms
SINAMICS S120 CU320-2
1 ms 0,5 ms 4,0 ms 0,5 ms
SINAMICS S110 CU305
1 ms 1 ms 4 ms 1 ms
C230-2 1,5 ms - - 1,5 ms C240 PN 1 ms 0,5 ms 4,0 ms 0,5 ms C240 1 ms - - 0,5 ms D410 PN - 0,5 ms 4,0 ms 2,0 ms D410 DP 2 ms - - 2,0 ms D425 2 ms 0,5 ms 4,0 ms 2,0 ms D435 1 ms 0,5 ms 4,0 ms 1,0 ms D445 / D445-1 1 ms 0,5 ms 4,0 ms 0,5 ms D445-2 DP/PN 1 ms 0,25 ms1) 4,0 ms 0,25 ms 1) D455-2 DP/PN 1 ms 0,25 ms1) 4,0 ms 0,25 ms 1) P350-3 1 ms 0,25 ms 4,0 ms 0,25 ms
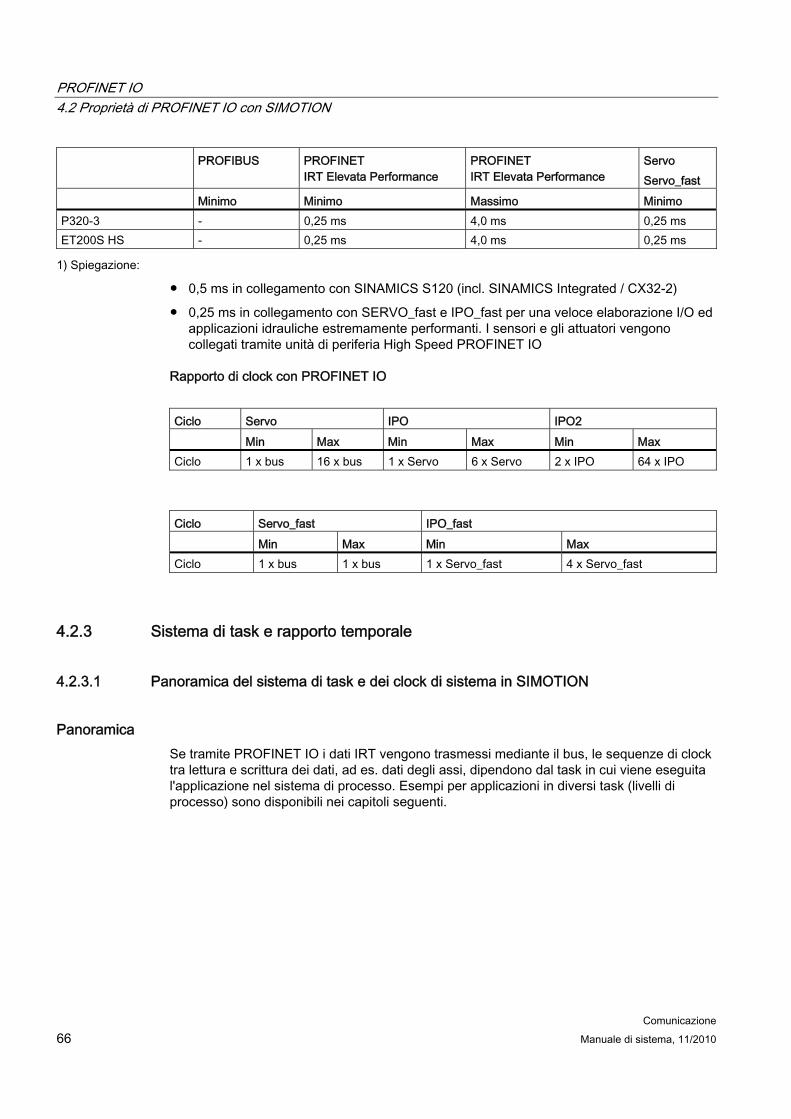
PROFINET IO 4.2 Proprietà di PROFINET IO con SIMOTION
Comunicazione 66 Manuale di sistema, 11/2010
PROFIBUS PROFINET IRT Elevata Performance
PROFINET IRT Elevata Performance
Servo Servo_fast
Minimo Minimo Massimo Minimo P320-3 - 0,25 ms 4,0 ms 0,25 ms ET200S HS - 0,25 ms 4,0 ms 0,25 ms
1) Spiegazione:
● 0,5 ms in collegamento con SINAMICS S120 (incl. SINAMICS Integrated / CX32-2)
● 0,25 ms in collegamento con SERVO_fast e IPO_fast per una veloce elaborazione I/O ed applicazioni idrauliche estremamente performanti. I sensori e gli attuatori vengono collegati tramite unità di periferia High Speed PROFINET IO
Rapporto di clock con PROFINET IO
Ciclo Servo IPO IPO2 Min Max Min Max Min Max Ciclo 1 x bus 16 x bus 1 x Servo 6 x Servo 2 x IPO 64 x IPO
Ciclo Servo_fast IPO_fast Min Max Min Max Ciclo 1 x bus 1 x bus 1 x Servo_fast 4 x Servo_fast
4.2.3 Sistema di task e rapporto temporale
4.2.3.1 Panoramica del sistema di task e dei clock di sistema in SIMOTION
Panoramica Se tramite PROFINET IO i dati IRT vengono trasmessi mediante il bus, le sequenze di clock tra lettura e scrittura dei dati, ad es. dati degli assi, dipendono dal task in cui viene eseguita l'applicazione nel sistema di processo. Esempi per applicazioni in diversi task (livelli di processo) sono disponibili nei capitoli seguenti.
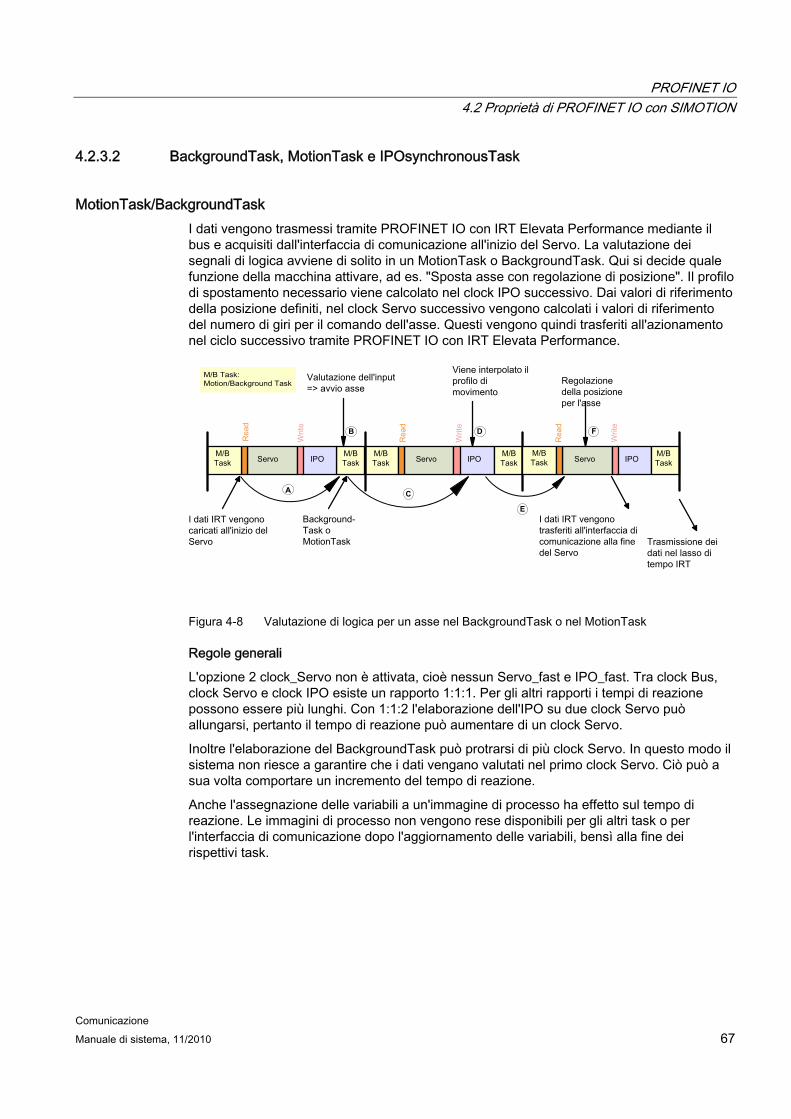
PROFINET IO 4.2 Proprietà di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 67
4.2.3.2 BackgroundTask, MotionTask e IPOsynchronousTask
MotionTask/BackgroundTask I dati vengono trasmessi tramite PROFINET IO con IRT Elevata Performance mediante il bus e acquisiti dall'interfaccia di comunicazione all'inizio del Servo. La valutazione dei segnali di logica avviene di solito in un MotionTask o BackgroundTask. Qui si decide quale funzione della macchina attivare, ad es. "Sposta asse con regolazione di posizione". Il profilo di spostamento necessario viene calcolato nel clock IPO successivo. Dai valori di riferimento della posizione definiti, nel clock Servo successivo vengono calcolati i valori di riferimento del numero di giri per il comando dell'asse. Questi vengono quindi trasferiti all'azionamento nel ciclo successivo tramite PROFINET IO con IRT Elevata Performance.
Trasmissione dei dati nel lasso di tempo IRT
Regolazione della posizione per l'asse
I dati IRT vengono trasferiti all'interfaccia di comunicazione alla fine del Servo
Viene interpolato il profilo di movimento
I dati IRT vengono caricati all'inizio del Servo
Background-Task o MotionTask
Valutazione dell'input=> avvio asse
Writ
e
A
B FD
E
C
IPOServo IPOServoIPOServo
Writ
e
Rea
d
Rea
d
M/BTask
Writ
e
Rea
d
M/BTask
M/BTask
M/BTask
M/BTask
M/BTask
M/B Task:Motion/Background Task
Figura 4-8 Valutazione di logica per un asse nel BackgroundTask o nel MotionTask
Regole generali
L'opzione 2 clock_Servo non è attivata, cioè nessun Servo_fast e IPO_fast. Tra clock Bus, clock Servo e clock IPO esiste un rapporto 1:1:1. Per gli altri rapporti i tempi di reazione possono essere più lunghi. Con 1:1:2 l'elaborazione dell'IPO su due clock Servo può allungarsi, pertanto il tempo di reazione può aumentare di un clock Servo.
Inoltre l'elaborazione del BackgroundTask può protrarsi di più clock Servo. In questo modo il sistema non riesce a garantire che i dati vengano valutati nel primo clock Servo. Ciò può a sua volta comportare un incremento del tempo di reazione.
Anche l'assegnazione delle variabili a un'immagine di processo ha effetto sul tempo di reazione. Le immagini di processo non vengono rese disponibili per gli altri task o per l'interfaccia di comunicazione dopo l'aggiornamento delle variabili, bensì alla fine dei rispettivi task.
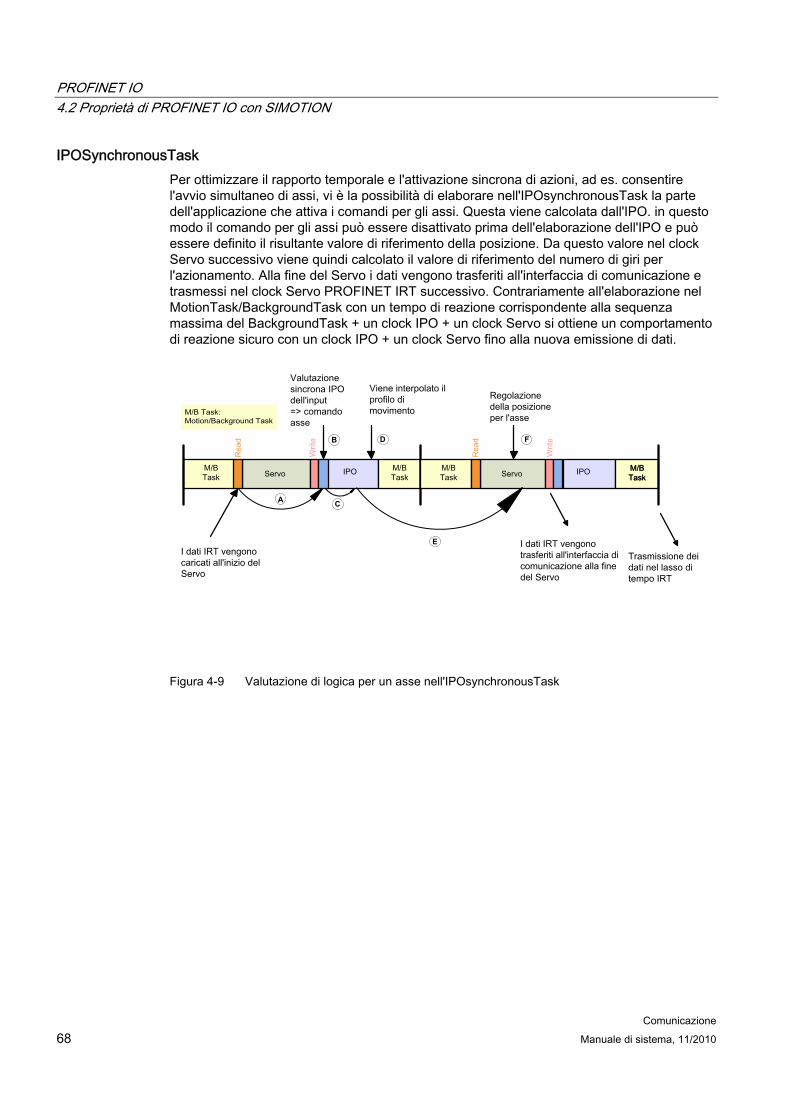
PROFINET IO 4.2 Proprietà di PROFINET IO con SIMOTION
Comunicazione 68 Manuale di sistema, 11/2010
IPOSynchronousTask Per ottimizzare il rapporto temporale e l'attivazione sincrona di azioni, ad es. consentire l'avvio simultaneo di assi, vi è la possibilità di elaborare nell'IPOsynchronousTask la parte dell'applicazione che attiva i comandi per gli assi. Questa viene calcolata dall'IPO. in questo modo il comando per gli assi può essere disattivato prima dell'elaborazione dell'IPO e può essere definito il risultante valore di riferimento della posizione. Da questo valore nel clock Servo successivo viene quindi calcolato il valore di riferimento del numero di giri per l'azionamento. Alla fine del Servo i dati vengono trasferiti all'interfaccia di comunicazione e trasmessi nel clock Servo PROFINET IRT successivo. Contrariamente all'elaborazione nel MotionTask/BackgroundTask con un tempo di reazione corrispondente alla sequenza massima del BackgroundTask + un clock IPO + un clock Servo si ottiene un comportamento di reazione sicuro con un clock IPO + un clock Servo fino alla nuova emissione di dati.
B FD
A
E
C
Regolazione della posizione per l'asse
Viene interpolato il profilo di movimento
I dati IRT vengono caricati all'inizio del Servo
Valutazione sincrona IPOdell'input=> comando asse
Trasmissione dei dati nel lasso di tempo IRT
I dati IRT vengono trasferiti all'interfaccia di comunicazione alla fine del Servo
M/B Task:Motion/Background Task
M/BTask
Writ
e
IPO IPOServoServo
Writ
e
Rea
d
Rea
dM/BTask
M/BTask
M/BTask
M/BTask
Figura 4-9 Valutazione di logica per un asse nell'IPOsynchronousTask
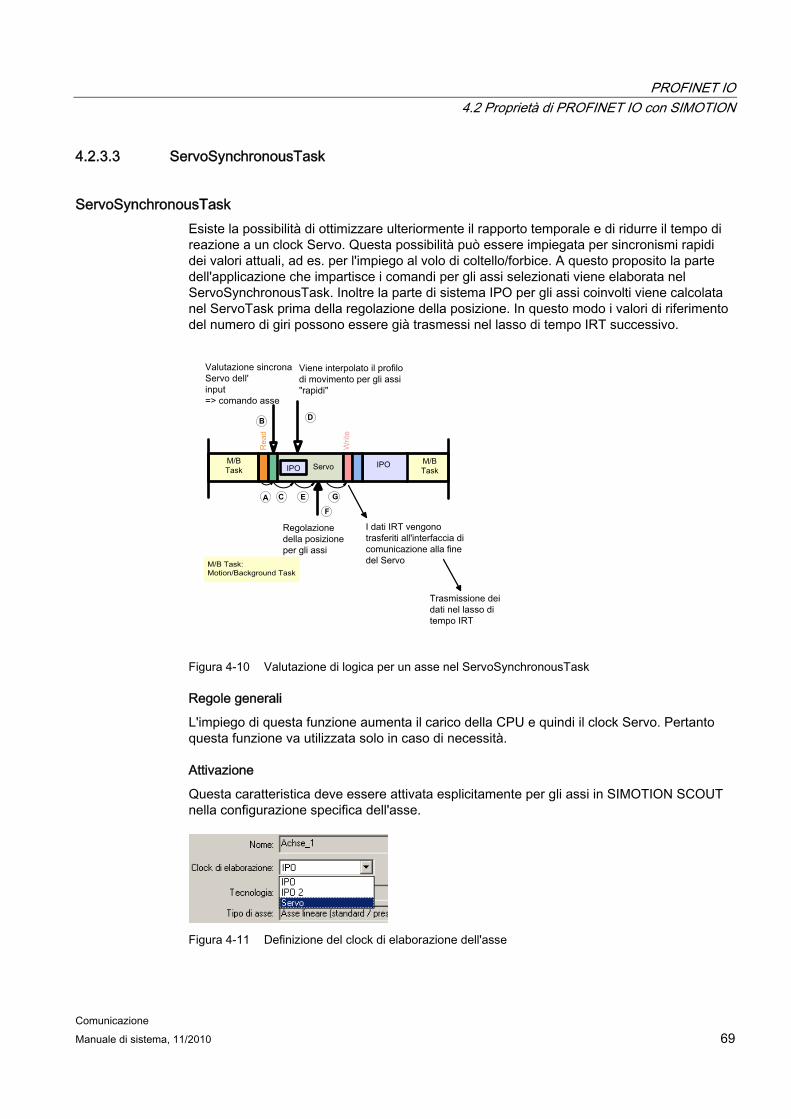
PROFINET IO 4.2 Proprietà di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 69
4.2.3.3 ServoSynchronousTask
ServoSynchronousTask Esiste la possibilità di ottimizzare ulteriormente il rapporto temporale e di ridurre il tempo di reazione a un clock Servo. Questa possibilità può essere impiegata per sincronismi rapidi dei valori attuali, ad es. per l'impiego al volo di coltello/forbice. A questo proposito la parte dell'applicazione che impartisce i comandi per gli assi selezionati viene elaborata nel ServoSynchronousTask. Inoltre la parte di sistema IPO per gli assi coinvolti viene calcolata nel ServoTask prima della regolazione della posizione. In questo modo i valori di riferimento del numero di giri possono essere già trasmessi nel lasso di tempo IRT successivo.
B
F
D
A EC G
Viene interpolato il profilo di movimento per gli assi "rapidi"
Valutazione sincrona Servo dell'input=> comando asse
Regolazione della posizione per gli assi
Trasmissione dei dati nel lasso di tempo IRT
I dati IRT vengono trasferiti all'interfaccia di comunicazione alla fine del Servo
M/BTask
M/BTask
M/B Task:Motion/Background Task
IPO IPOServo
Writ
e
Rea
d
Figura 4-10 Valutazione di logica per un asse nel ServoSynchronousTask
Regole generali
L'impiego di questa funzione aumenta il carico della CPU e quindi il clock Servo. Pertanto questa funzione va utilizzata solo in caso di necessità.
Attivazione
Questa caratteristica deve essere attivata esplicitamente per gli assi in SIMOTION SCOUT nella configurazione specifica dell'asse.
Figura 4-11 Definizione del clock di elaborazione dell'asse
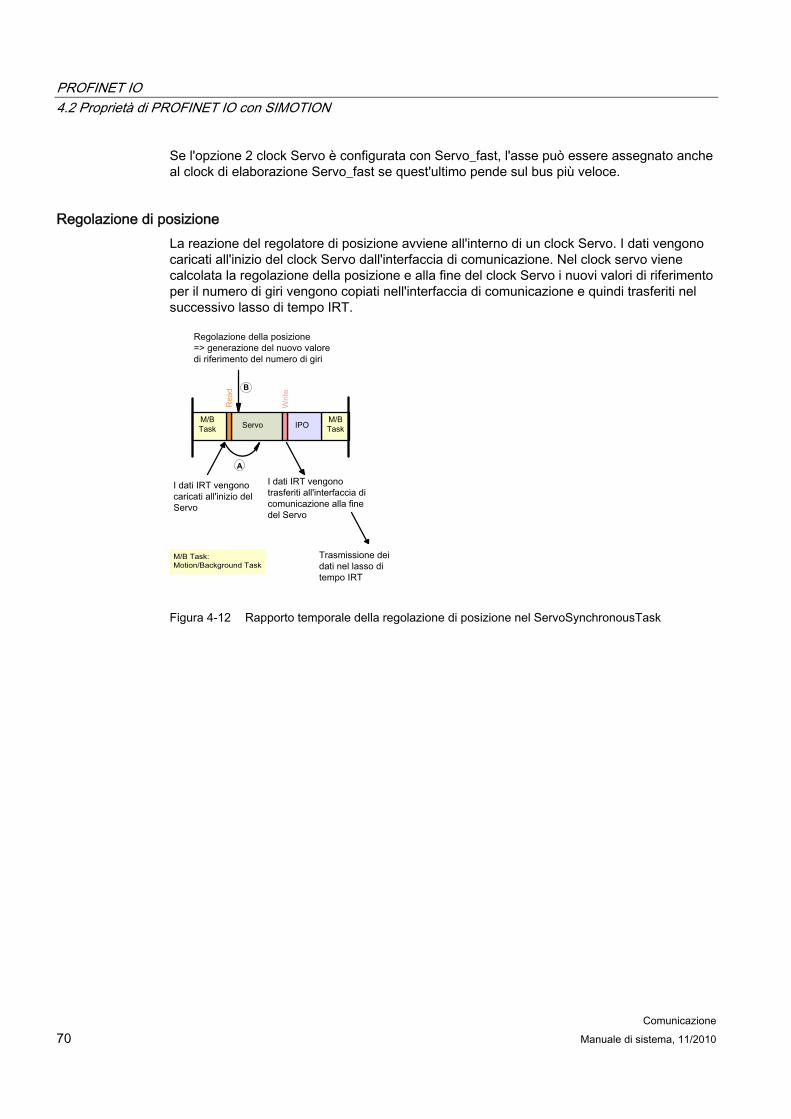
PROFINET IO 4.2 Proprietà di PROFINET IO con SIMOTION
Comunicazione 70 Manuale di sistema, 11/2010
Se l'opzione 2 clock Servo è configurata con Servo_fast, l'asse può essere assegnato anche al clock di elaborazione Servo_fast se quest'ultimo pende sul bus più veloce.
Regolazione di posizione La reazione del regolatore di posizione avviene all'interno di un clock Servo. I dati vengono caricati all'inizio del clock Servo dall'interfaccia di comunicazione. Nel clock servo viene calcolata la regolazione della posizione e alla fine del clock Servo i nuovi valori di riferimento per il numero di giri vengono copiati nell'interfaccia di comunicazione e quindi trasferiti nel successivo lasso di tempo IRT.
Trasmissione dei dati nel lasso di tempo IRT
I dati IRT vengono trasferiti all'interfaccia di comunicazione alla fine del Servo
I dati IRT vengono caricati all'inizio del Servo
Regolazione della posizione=> generazione del nuovo valore di riferimento del numero di giri
A
B
IPOServo
Writ
e
Rea
d
M/BTask
M/BTask
M/B Task:Motion/Background Task
Figura 4-12 Rapporto temporale della regolazione di posizione nel ServoSynchronousTask
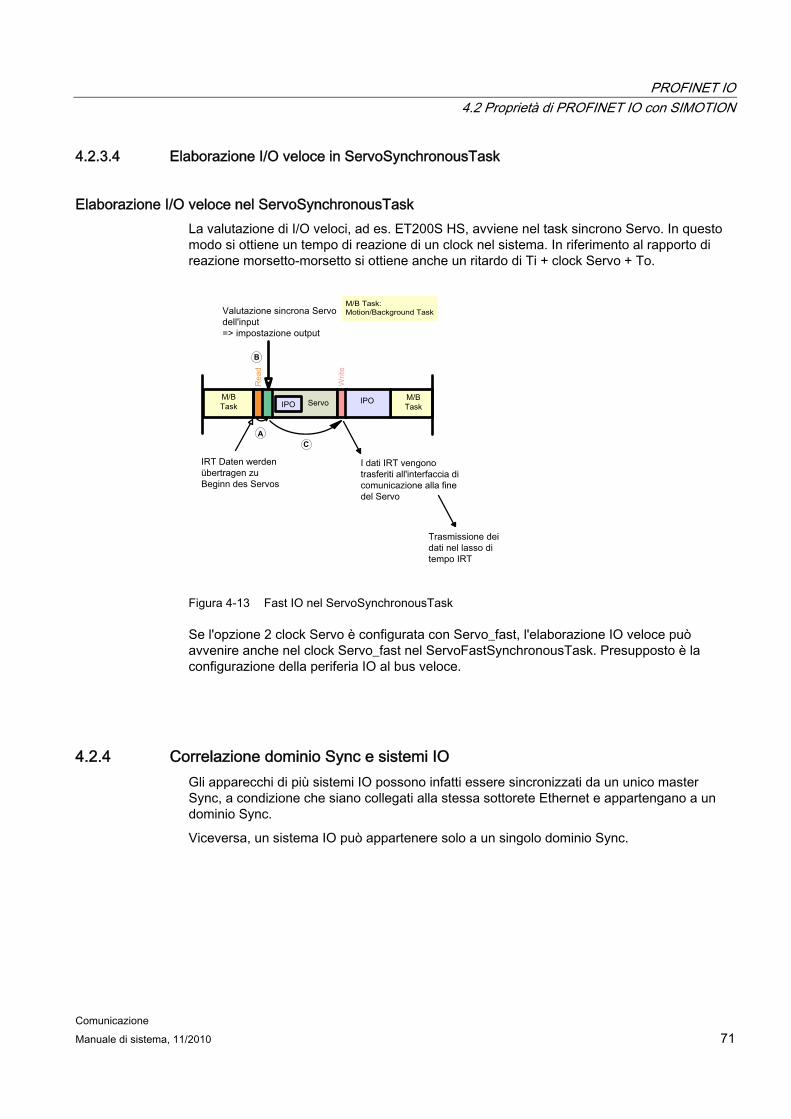
PROFINET IO 4.2 Proprietà di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 71
4.2.3.4 Elaborazione I/O veloce in ServoSynchronousTask
Elaborazione I/O veloce nel ServoSynchronousTask La valutazione di I/O veloci, ad es. ET200S HS, avviene nel task sincrono Servo. In questo modo si ottiene un tempo di reazione di un clock nel sistema. In riferimento al rapporto di reazione morsetto-morsetto si ottiene anche un ritardo di Ti + clock Servo + To.
B
AC
Valutazione sincrona Servo dell'input=> impostazione output
Trasmissione dei dati nel lasso di tempo IRT
I dati IRT vengono trasferiti all'interfaccia di comunicazione alla fine del Servo
M/BTask
M/BTask
M/B Task:Motion/Background Task
IPO IPOServo
Writ
e
Rea
d
IRT Daten werden übertragen zu Beginn des Servos
Figura 4-13 Fast IO nel ServoSynchronousTask
Se l'opzione 2 clock Servo è configurata con Servo_fast, l'elaborazione IO veloce può avvenire anche nel clock Servo_fast nel ServoFastSynchronousTask. Presupposto è la configurazione della periferia IO al bus veloce.
4.2.4 Correlazione dominio Sync e sistemi IO Gli apparecchi di più sistemi IO possono infatti essere sincronizzati da un unico master Sync, a condizione che siano collegati alla stessa sottorete Ethernet e appartengano a un dominio Sync.
Viceversa, un sistema IO può appartenere solo a un singolo dominio Sync.
PROFINET IO 4.2 Proprietà di PROFINET IO con SIMOTION
Comunicazione 72 Manuale di sistema, 11/2010
4.2.5 Master Sync ridondante
Descrizione Per determinati impianti, ad es. macchine da stampa, è necessario che i relativi componenti possano essere impiegati in modalità standalone oppure in modo sincrono insieme ad altri. Se l'impianto complessivo ha solo un master Sync., l'altro componente non risulterebbe autonomamente funzionante. Pertanto verrebbe realizzata la funzione "master Sync ridondante". Per ogni macchina componente viene definito un master Sync. Uno dei due viene definito "master Sync", l'altro "master Sync (ridondante). Finché l'impianto viene utilizzato in modo combinato, il "master Sync (ridondante)" si sincronizza con il master Sync.
Se il master Sync si guasta, il master Sync (ridondante) continua a funzionare in modo autarchico e sincronizza gli slave Sync che gli sono stati assegnati. Gli slave Sync assegnati al master Sync perdono la sincronizzazione e smettono di funzionare.
Limitazioni d'uso I due master Sync devono essere collegati direttamente con un cavo senza switch. In caso di guasto sul percorso di trasmissione tra il master Sync e il master Sync (ridondante), in modo che vengano create 2 reti parziali con un master Sync, le due reti parziali rimangono sincronizzate sul master Sync rimanente. In questo modo vengono generate due reti parziali sincronizzate indipendentemente l'una dall'altra, che tra l'altro procedono separatamente per effetto di una deriva di temperatura del quarzo. Dopo il ripristino del percorso di trasmissione il master Sync (ridondante) non riesce a sincronizzarsi correttamente all'altro master Sync, cioè gli azionamenti assegnati al master Sync (ridondante) perderebbero la sincronizzazione per un breve lasso di tempo e si guasterebbero. Per una sincronizzazione è necessario che l'applicazione venga arrestata e nuovamente sincronizzata.
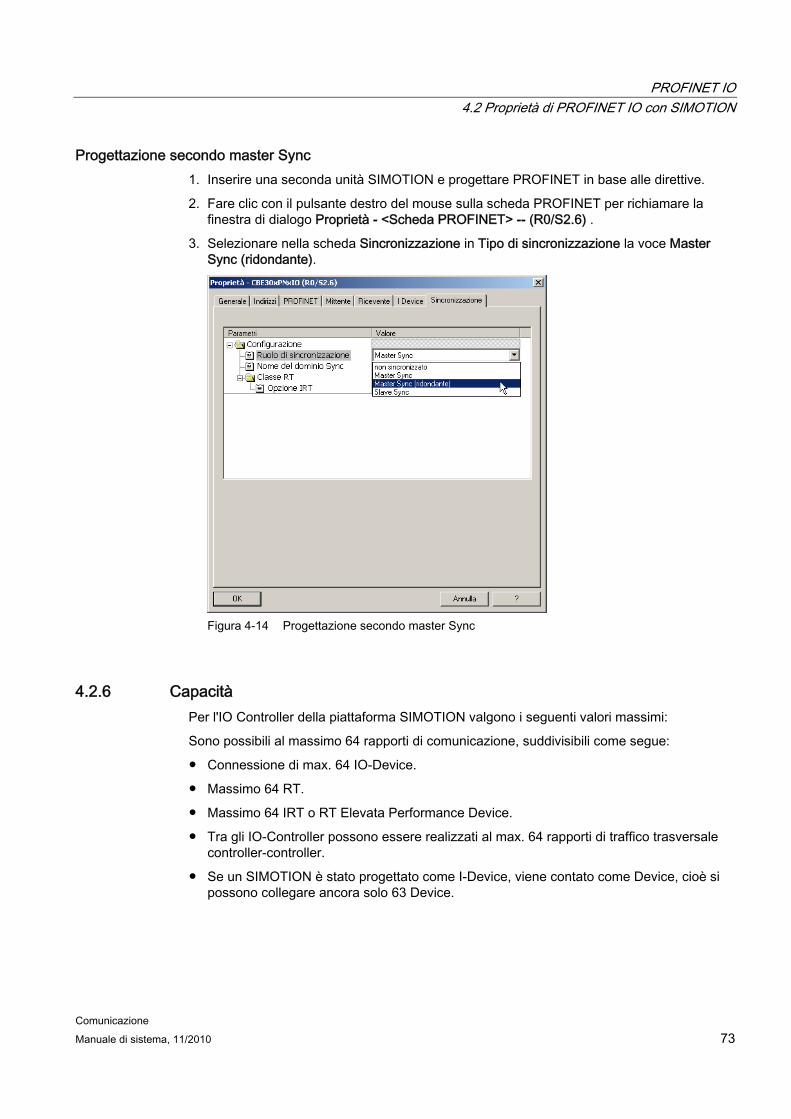
PROFINET IO 4.2 Proprietà di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 73
Progettazione secondo master Sync 1. Inserire una seconda unità SIMOTION e progettare PROFINET in base alle direttive.
2. Fare clic con il pulsante destro del mouse sulla scheda PROFINET per richiamare la finestra di dialogo Proprietà - <Scheda PROFINET> -- (R0/S2.6) .
3. Selezionare nella scheda Sincronizzazione in Tipo di sincronizzazione la voce Master Sync (ridondante).
Figura 4-14 Progettazione secondo master Sync
4.2.6 Capacità Per l'IO Controller della piattaforma SIMOTION valgono i seguenti valori massimi:
Sono possibili al massimo 64 rapporti di comunicazione, suddivisibili come segue:
● Connessione di max. 64 IO-Device.
● Massimo 64 RT.
● Massimo 64 IRT o RT Elevata Performance Device.
● Tra gli IO-Controller possono essere realizzati al max. 64 rapporti di traffico trasversale controller-controller.
● Se un SIMOTION è stato progettato come I-Device, viene contato come Device, cioè si possono collegare ancora solo 63 Device.
PROFINET IO 4.2 Proprietà di PROFINET IO con SIMOTION
Comunicazione 74 Manuale di sistema, 11/2010
● Un SIMOTION può ricevere dati da un massimo di 64 altri SIMOTION con traffico trasversale controller-controller, ma può inviare dati a un numero qualsiasi di SIMOTION.
● Per il traffico trasversale controller-controller occorre prestare attenzione al volume di dati. Un traffico trasversale viene contato come collegamento unico solo fino a un determinato volume di dati. Se è necessario un secondo telegramma, sul traffico trasversale vengono eliminati due collegamenti.
Funzionamento combinato per traffico trasversale IO-Device e Controller-Controller
Il numero possibile di apparecchi nel funzionamento combinato può essere calcolato tramite le formule seguenti:
IRT Elevata Performance
RT + IRT Elevata Performance-IO-Device + frame traffico trasversale <= 64
Nota
In caso di rapporto di traffico trasversale non si parla del numero di righe degli slot progettati (vedere Progettazione ricevitore (Pagina 118)) per la progettazione del traffico trasversale IRT Elevata Performance, ma del numero di frame Ethernet ricevuti per il traffico trasversale. Un frame Ethernet può contenere al max. 768 byte di dati utili del traffico trasversale.
Uno slot ha al massimo 254 byte e nel traffico trasversale possono essere scambiati 3072 byte di dati utili (suddivisi in 4 frame da 768 byte). Il valore dipende dalle grandezze selezionate per gli slot. Si possono pertanto ricevere più slot da un trasmettitore, che però possono essere trasmessi in un telegramma.
Ogni provider trasmette i propri dati di traffico trasversale in un frame Ethernet. Qualsiasi altro SIMOTION può leggere questi dati in questo frame. Si ottiene quindi un collegamento significativo a ogni SIMOTION trasmittente.
Nel traffico Controller-Device la grandezza di dati utili di un frame è 1440 byte.
Config HW verifica in base alle formule di cui sopra la capacità progettata per la compilazione del progetto.
Area indirizzi
Nell'area indirizzi logica di un IO-Controller per i dati di input e output devono essere assegnati al massimo 4 kilobyte per i dati PROFINET IO. La restante area di memoria, complessivamente di 16 kilobyte, può essere occupata ad es. da dati PROFIBUS o da dati di diagnostica.
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 75
4.3 Progettazione di PROFINET IO con SIMOTION
4.3.1 Novità a partire da SIMOTION SCOUT V4.2
Procedura di sincronizzazione IRT SIMOTION soltanto IRT Elevata Performance. Questa procedura di sincronizzazione viene impostata automaticamente in PROFINET IRT.
Controller con interfaccia PN integrata Con SIMOTION D4x5-2 DP/PN sono disponibili due nuovi controller SIMOTION D con interfacce PN integrate.
La sincronizzazione al clock per le applicazioni è stata semplificata Le applicazioni con sincronismo di clock tipiche per Motion Control sono state fortemente semplificate. Il calcolo delle costanti di tempo Ti/To può avvenire automaticamente per tutti gli IO-Device. La progettazione in Config HW è stata ulteriormente ampliata, in modo tale che sul controller le proprietà degli oggetti possono essere impostate automaticamente sui task sincroni al clock.
I-Device Con Step 7 V5.5 la funzionalità dell'I-Device è stata migliorata. Con i progetti SIMOTION SCOUT < V4.2 occorre osservare alcuni punti nell'upgrade a V4.2. Maggiori informazioni a riguardo nel capitolo I-Device.
Proxy F dell'I-Device Tramite il proxy F dell'I-Device è possibile realizzare una progettazione PROFIsafe con host F (F-CPU SIMATIC) su PROFINET con apparecchi SIMOTION (SIMOTION D4xx, SIMOTION P3xx, SIMOTION C240 PN) per gli azionamenti sottoposti.
Secondo clock Servo (Servo_fast) Con il secondo clock Servo è possibile gestire due sistemi di bus in diversi clock dell'applicazione. Per entrambi i clock dell'applicazione sono disponibili un clock Servo e un clock IPO assegnato. In questo modo è possibile suddividere l'applicazione in un clock lento e in un clock rapido (Servo_fast e IPO_fast).
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 76 Manuale di sistema, 11/2010
4.3.2 Procedimento per la progettazione di PROFINET IO con IRT Elevata Performance
Procedimento Per la progettazione di PROFINET IO con IRT Elevata Performance V2.2 occorre procedere come segue:
1. Inserimento dell'unità SIMOTION. Selezionare per prima cosa l'apparecchio , quindi la versione dell'apparecchio. Sono possibili soltanto varianti PROFINET V2.2. Con apparecchi contrassegnati PN l'interfaccia PROFINET è già integrata.
– Con SIMOTION C e SIMOTION P selezionare soltanto ancora la versione SIMOTION, ad es. V4.2.
– Con SIMOTION D selezionare, a seconda della versione, la versione SIMOTION V4.2, l'unità opzionale e l'azionamento SINAMICS e la sua versione. L'unità opzionale CBE30 per PROFINET può essere selezionata oppure inserita successivamente in Config HW dal catalogo hardware sotto SIMOTION Drive Based > SIMOTION D4xx > 6AUxx > V4.2 - PN-V2.2xx.
2. Inserimento IO-Device: Inserire gli IO-Device dal catalogo hardware di Config HW nel sistema I/O. Gli IO-Device sono disponibili nel catalogo hardware in PROFINET IO.
3. Progettazione del dominio Sync e definizione del clock di invio: Progettare quale nodo PROFINET IO funge da master Sync (encoder clock) e definire i relativi slave Sync. Definire il clock di invio.
4. Creare la topologia: Definire la topologia, cioè stabilire l'interconnessione delle singole porte degli apparecchi PROFINET IO. La progettazione della topologia è necessaria solo per PROFINET IO con IRT Elevata Performance. Se occorre utilizzare la nomina basata sulla topologia, è necessario progettare la topologia per tutti gli apparecchi PROFINET.
5. Traffico trasversale controller-controller: Stabilire quali campi di indirizzi usare per la trasmissione e quali per la ricezione.
4.3.3 Inserimento e progettazione di SIMOTION D
4.3.3.1 Inserimento e progettazione generale di SIMOTION D
Informazioni generali È stato creato un progetto e si desidera progettare un SIMOTION D utilizzando un'interfaccia PROFINET.
Con SIMOTION D le Control Unit dispongono, a seconda della versione, di un'interfaccia PROFINET onboard (D410 PN, D4x5-2 DP/PN) o di un'unità opzionale CBE30 per PROFINET (D4x5).
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 77
È possibile selezionare CBE30 nella finestra di dialogo o inserirla successivamente in Config HW dal catalogo hardware sotto SIMOTION Drive Based > SIMOTION D4x5 > 6AUxx > V4.2 - PN-V2.2xx.
Realizzazione Interfaccia PROFINET:
● in D410 PN e D4x5-2 DP/PN già integrate
● in D4x5 disponibile opzionalmente (unità opzionale CBE30)
Questa operazione è descritta nei capitoli successivi.
4.3.3.2 Inserimento e progettazione di SIMOTION D4x5-2/D410 PN
Informazioni generali È stato creato un progetto e si desidera progettare un SIMOTION D4x5-2 DP/PN o SIMOTION D410 PN utilizzando un'interfaccia PROFINET. Il procedimento viene rappresentato nell'esempio di SIMOTION D4x5-2 DP/PN.
Procedimento 1. Fare clic su Inserisci apparecchio SIMOTION nella navigazione di progetto per aprire la
finestra di dialogo per la selezione dell'apparecchio.
2. Selezionare sotto Apparecchio SIMOTION D e fare clic su una Versione dell'apparecchio, ad es. D455-2 DP/PN.
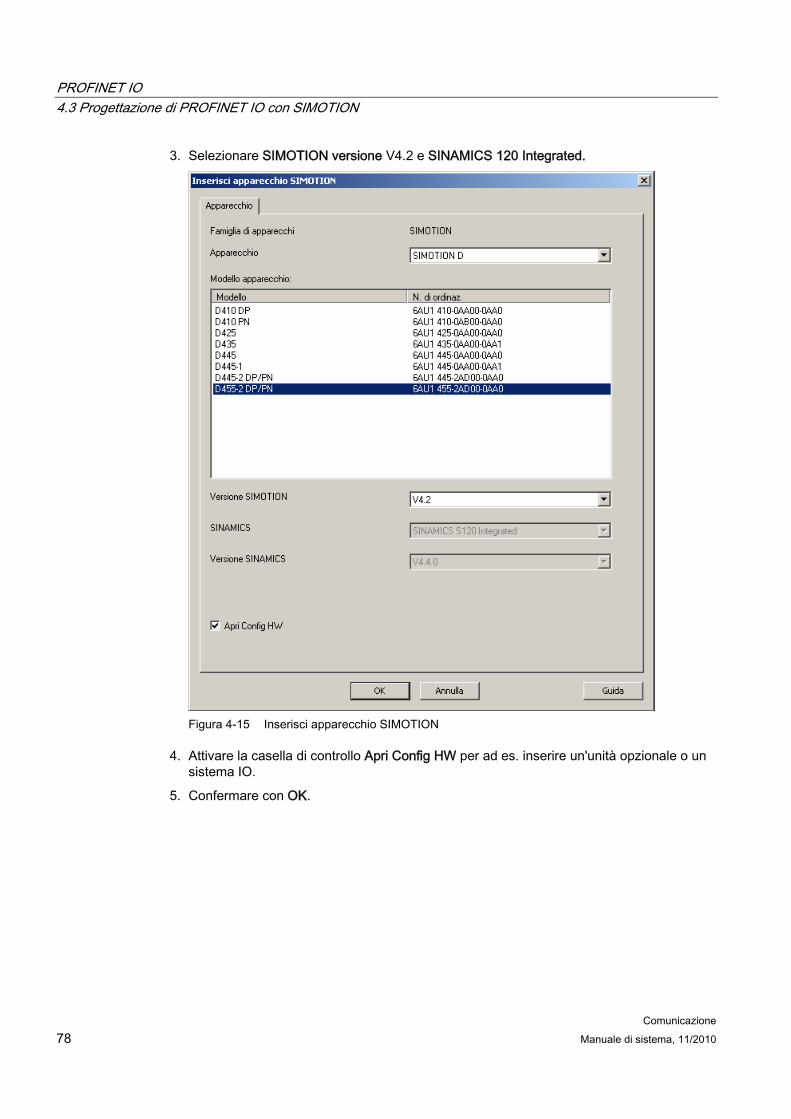
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 78 Manuale di sistema, 11/2010
3. Selezionare SIMOTION versione V4.2 e SINAMICS 120 Integrated.
Figura 4-15 Inserisci apparecchio SIMOTION
4. Attivare la casella di controllo Apri Config HW per ad es. inserire un'unità opzionale o un sistema IO.
5. Confermare con OK.
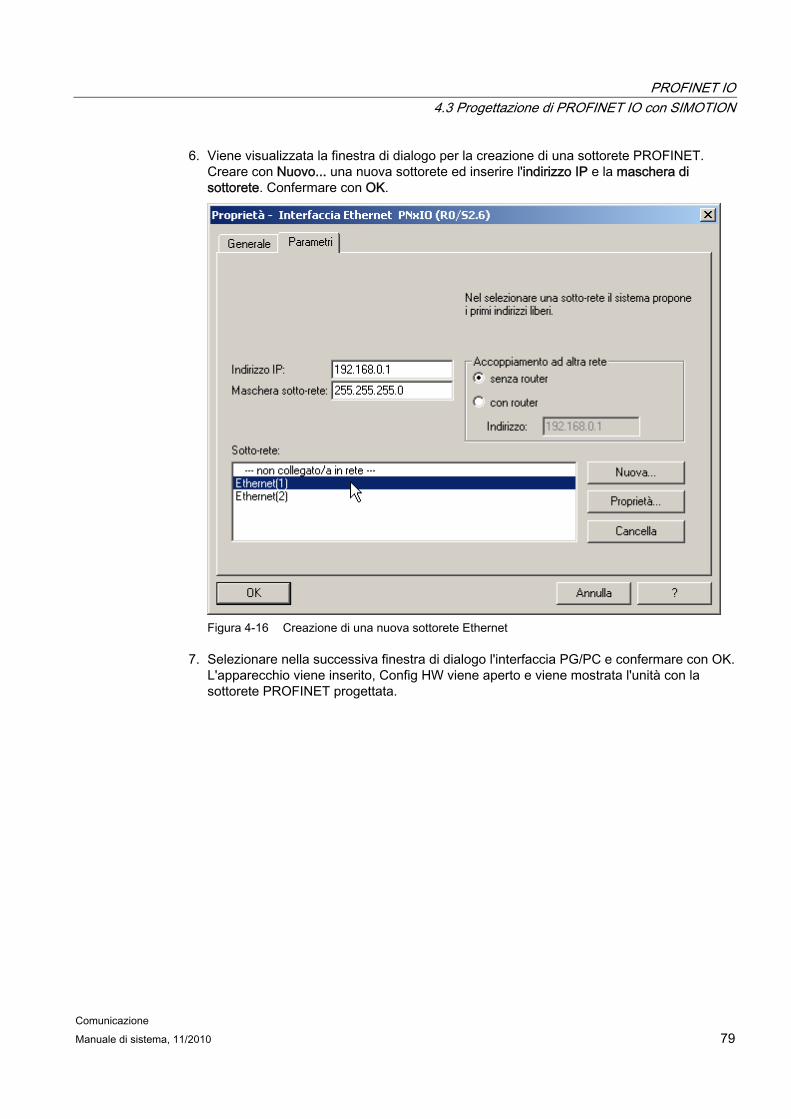
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 79
6. Viene visualizzata la finestra di dialogo per la creazione di una sottorete PROFINET. Creare con Nuovo... una nuova sottorete ed inserire l'indirizzo IP e la maschera di sottorete. Confermare con OK.
Figura 4-16 Creazione di una nuova sottorete Ethernet
7. Selezionare nella successiva finestra di dialogo l'interfaccia PG/PC e confermare con OK. L'apparecchio viene inserito, Config HW viene aperto e viene mostrata l'unità con la sottorete PROFINET progettata.
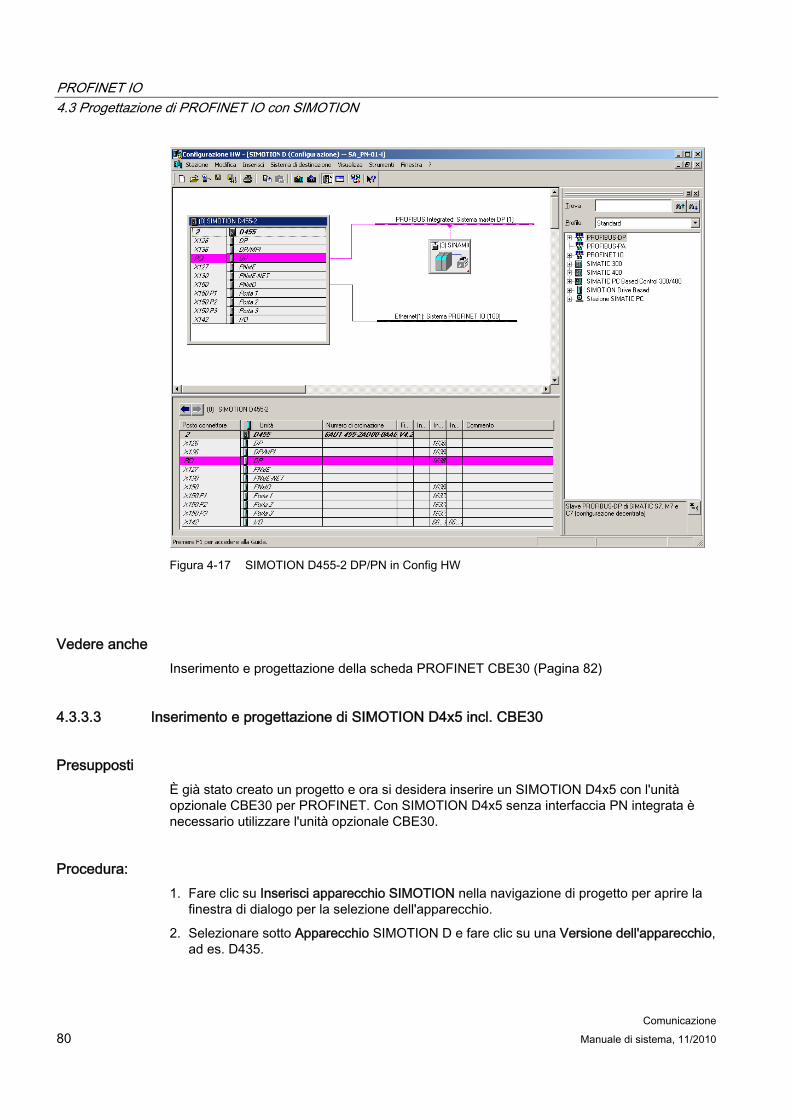
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 80 Manuale di sistema, 11/2010
Figura 4-17 SIMOTION D455-2 DP/PN in Config HW
Vedere anche Inserimento e progettazione della scheda PROFINET CBE30 (Pagina 82)
4.3.3.3 Inserimento e progettazione di SIMOTION D4x5 incl. CBE30
Presupposti È già stato creato un progetto e ora si desidera inserire un SIMOTION D4x5 con l'unità opzionale CBE30 per PROFINET. Con SIMOTION D4x5 senza interfaccia PN integrata è necessario utilizzare l'unità opzionale CBE30.
Procedura: 1. Fare clic su Inserisci apparecchio SIMOTION nella navigazione di progetto per aprire la
finestra di dialogo per la selezione dell'apparecchio.
2. Selezionare sotto Apparecchio SIMOTION D e fare clic su una Versione dell'apparecchio, ad es. D435.
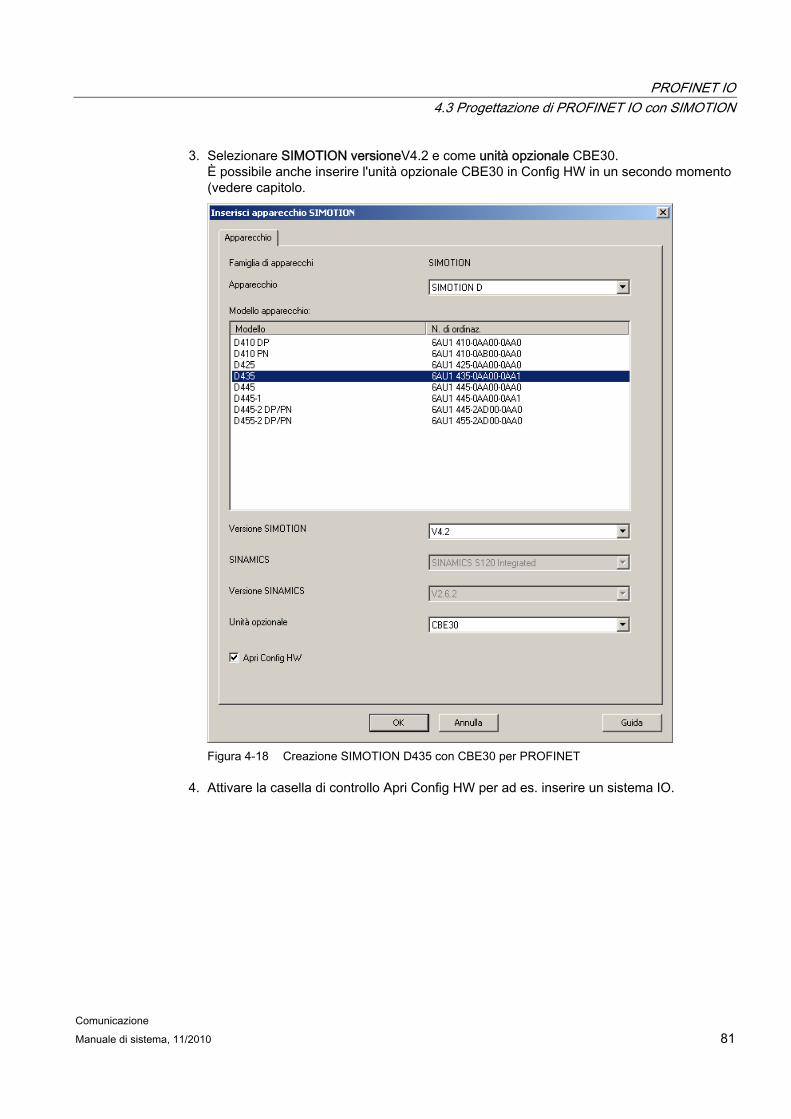
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 81
3. Selezionare SIMOTION versioneV4.2 e come unità opzionale CBE30. È possibile anche inserire l'unità opzionale CBE30 in Config HW in un secondo momento (vedere capitolo.
Figura 4-18 Creazione SIMOTION D435 con CBE30 per PROFINET
4. Attivare la casella di controllo Apri Config HW per ad es. inserire un sistema IO.
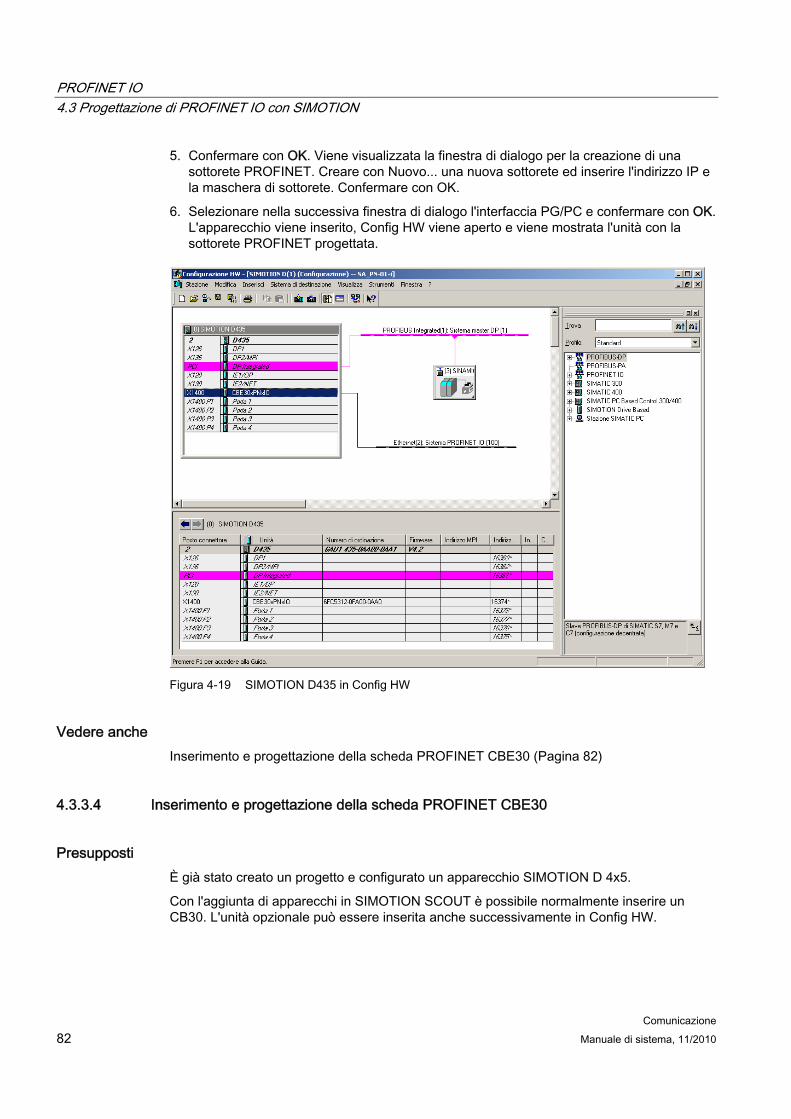
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 82 Manuale di sistema, 11/2010
5. Confermare con OK. Viene visualizzata la finestra di dialogo per la creazione di una sottorete PROFINET. Creare con Nuovo... una nuova sottorete ed inserire l'indirizzo IP e la maschera di sottorete. Confermare con OK.
6. Selezionare nella successiva finestra di dialogo l'interfaccia PG/PC e confermare con OK. L'apparecchio viene inserito, Config HW viene aperto e viene mostrata l'unità con la sottorete PROFINET progettata.
Figura 4-19 SIMOTION D435 in Config HW
Vedere anche Inserimento e progettazione della scheda PROFINET CBE30 (Pagina 82)
4.3.3.4 Inserimento e progettazione della scheda PROFINET CBE30
Presupposti È già stato creato un progetto e configurato un apparecchio SIMOTION D 4x5.
Con l'aggiunta di apparecchi in SIMOTION SCOUT è possibile normalmente inserire un CB30. L'unità opzionale può essere inserita anche successivamente in Config HW.
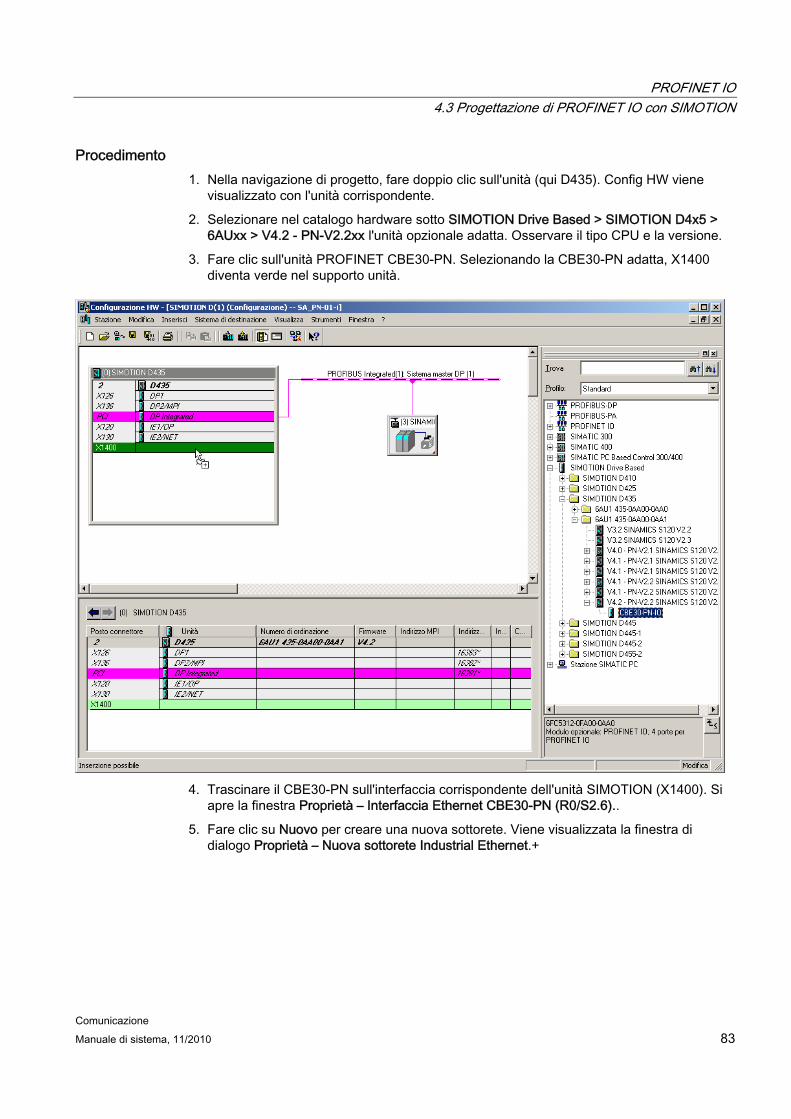
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 83
Procedimento 1. Nella navigazione di progetto, fare doppio clic sull'unità (qui D435). Config HW viene
visualizzato con l'unità corrispondente.
2. Selezionare nel catalogo hardware sotto SIMOTION Drive Based > SIMOTION D4x5 > 6AUxx > V4.2 - PN-V2.2xx l'unità opzionale adatta. Osservare il tipo CPU e la versione.
3. Fare clic sull'unità PROFINET CBE30-PN. Selezionando la CBE30-PN adatta, X1400 diventa verde nel supporto unità.
4. Trascinare il CBE30-PN sull'interfaccia corrispondente dell'unità SIMOTION (X1400). Si
apre la finestra Proprietà – Interfaccia Ethernet CBE30-PN (R0/S2.6)..
5. Fare clic su Nuovo per creare una nuova sottorete. Viene visualizzata la finestra di dialogo Proprietà – Nuova sottorete Industrial Ethernet.+
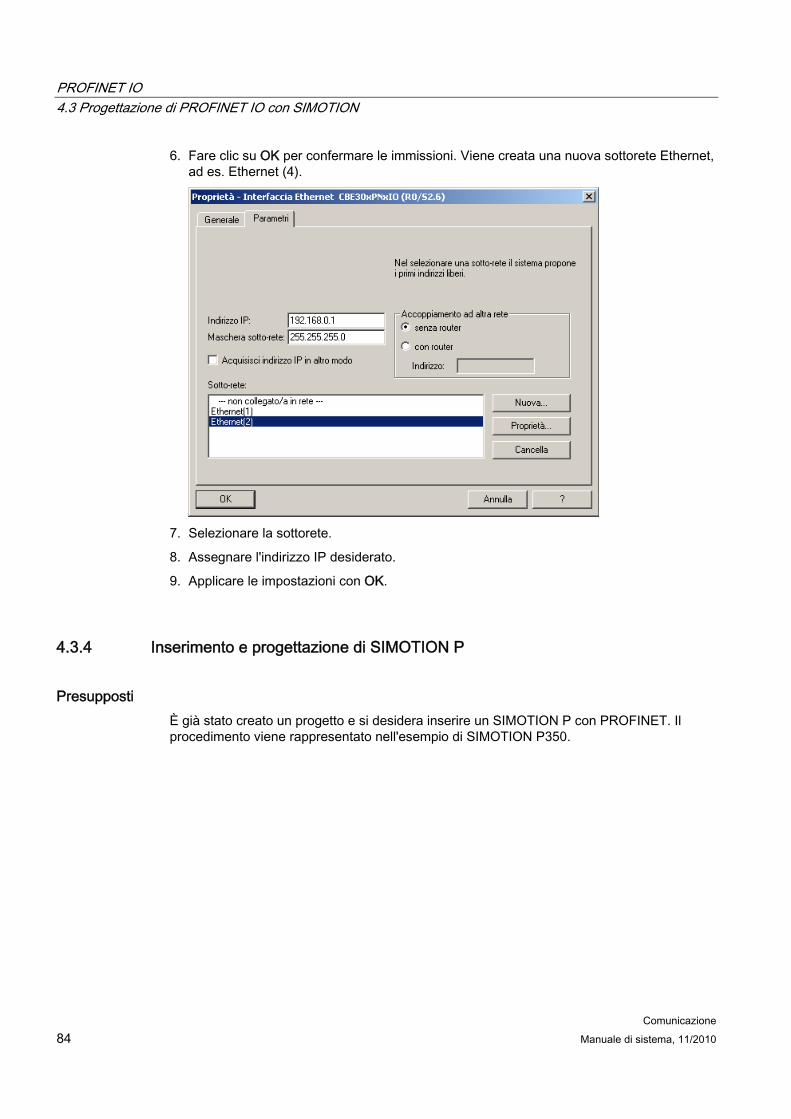
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 84 Manuale di sistema, 11/2010
6. Fare clic su OK per confermare le immissioni. Viene creata una nuova sottorete Ethernet, ad es. Ethernet (4).
7. Selezionare la sottorete.
8. Assegnare l'indirizzo IP desiderato.
9. Applicare le impostazioni con OK.
4.3.4 Inserimento e progettazione di SIMOTION P
Presupposti È già stato creato un progetto e si desidera inserire un SIMOTION P con PROFINET. Il procedimento viene rappresentato nell'esempio di SIMOTION P350.
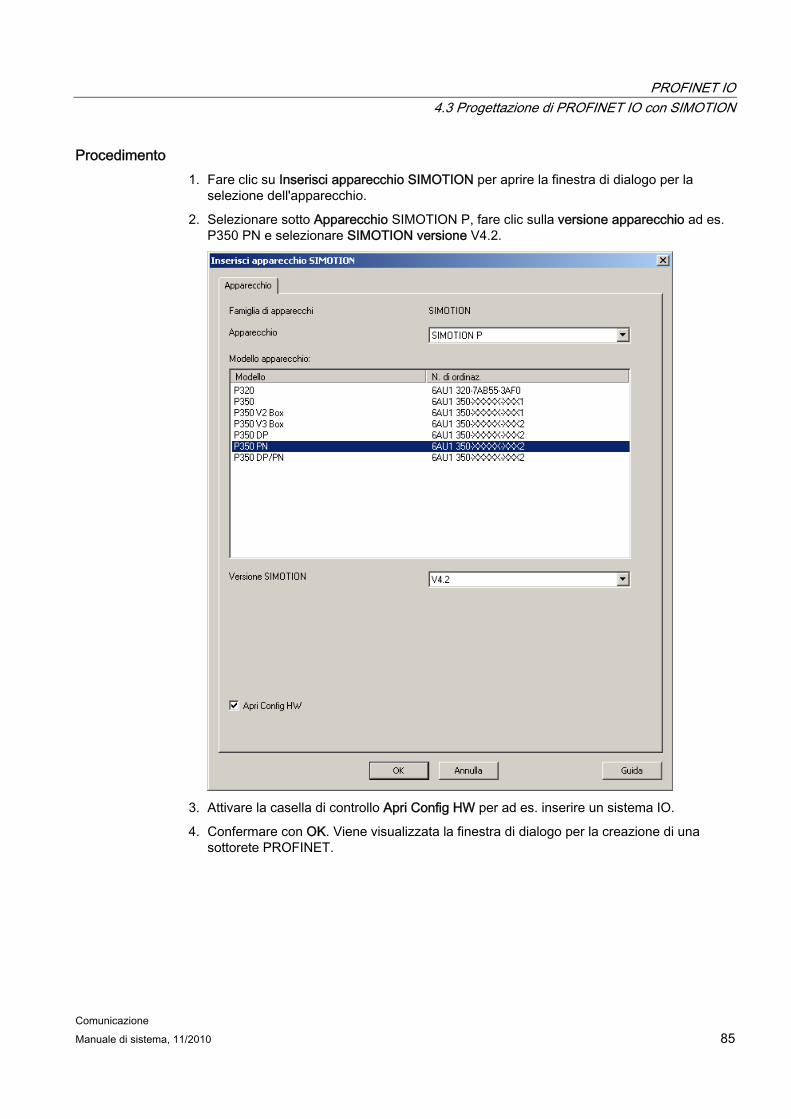
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 85
Procedimento 1. Fare clic su Inserisci apparecchio SIMOTION per aprire la finestra di dialogo per la
selezione dell'apparecchio.
2. Selezionare sotto Apparecchio SIMOTION P, fare clic sulla versione apparecchio ad es. P350 PN e selezionare SIMOTION versione V4.2.
3. Attivare la casella di controllo Apri Config HW per ad es. inserire un sistema IO.
4. Confermare con OK. Viene visualizzata la finestra di dialogo per la creazione di una sottorete PROFINET.
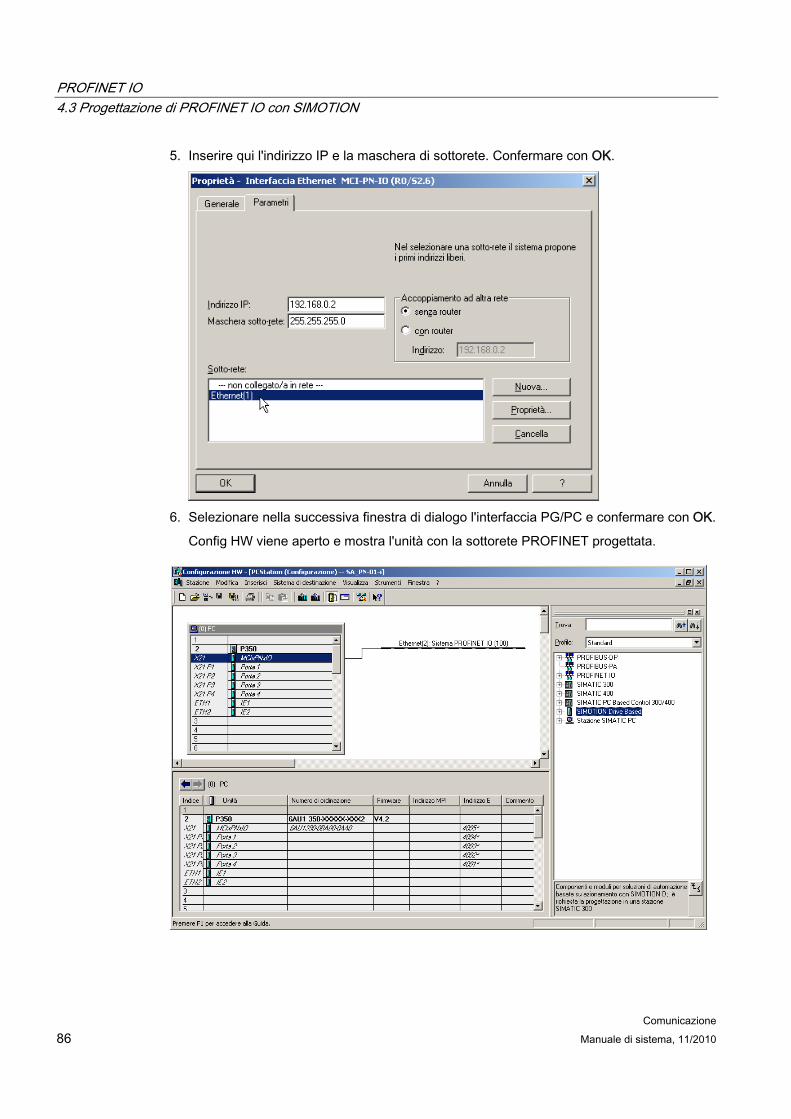
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 86 Manuale di sistema, 11/2010
5. Inserire qui l'indirizzo IP e la maschera di sottorete. Confermare con OK.
6. Selezionare nella successiva finestra di dialogo l'interfaccia PG/PC e confermare con OK.
Config HW viene aperto e mostra l'unità con la sottorete PROFINET progettata.
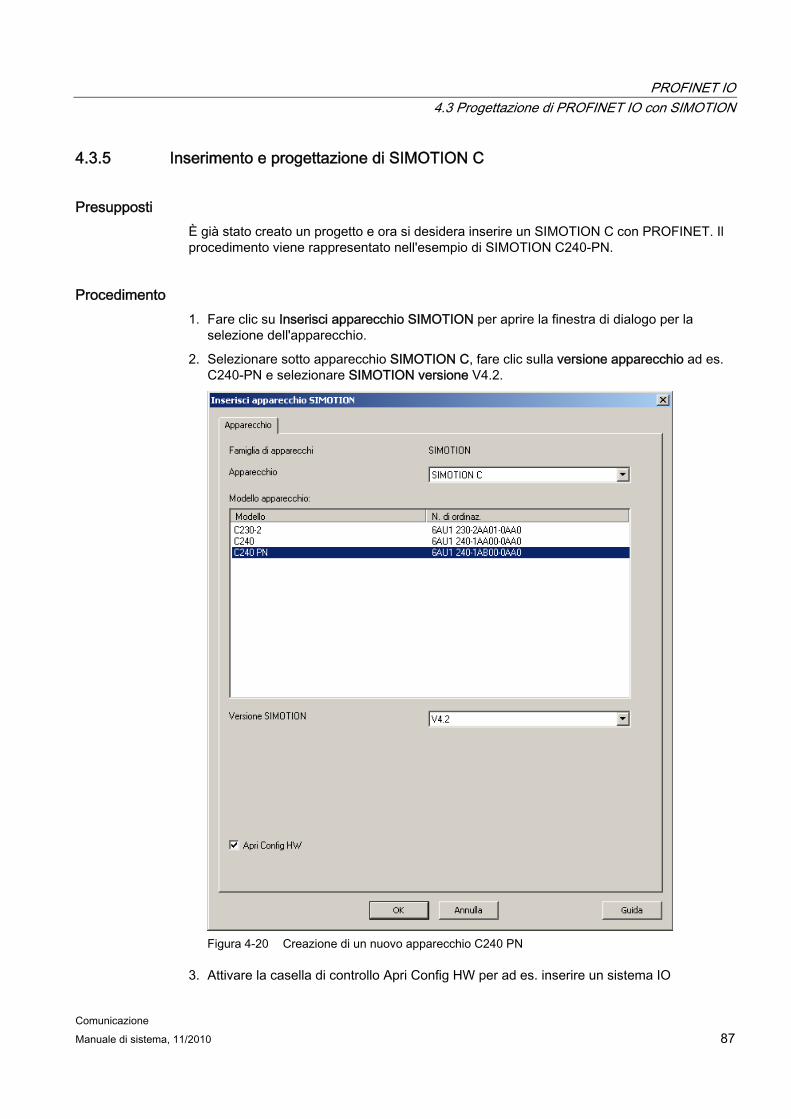
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 87
4.3.5 Inserimento e progettazione di SIMOTION C
Presupposti È già stato creato un progetto e ora si desidera inserire un SIMOTION C con PROFINET. Il procedimento viene rappresentato nell'esempio di SIMOTION C240-PN.
Procedimento 1. Fare clic su Inserisci apparecchio SIMOTION per aprire la finestra di dialogo per la
selezione dell'apparecchio.
2. Selezionare sotto apparecchio SIMOTION C, fare clic sulla versione apparecchio ad es. C240-PN e selezionare SIMOTION versione V4.2.
Figura 4-20 Creazione di un nuovo apparecchio C240 PN
3. Attivare la casella di controllo Apri Config HW per ad es. inserire un sistema IO
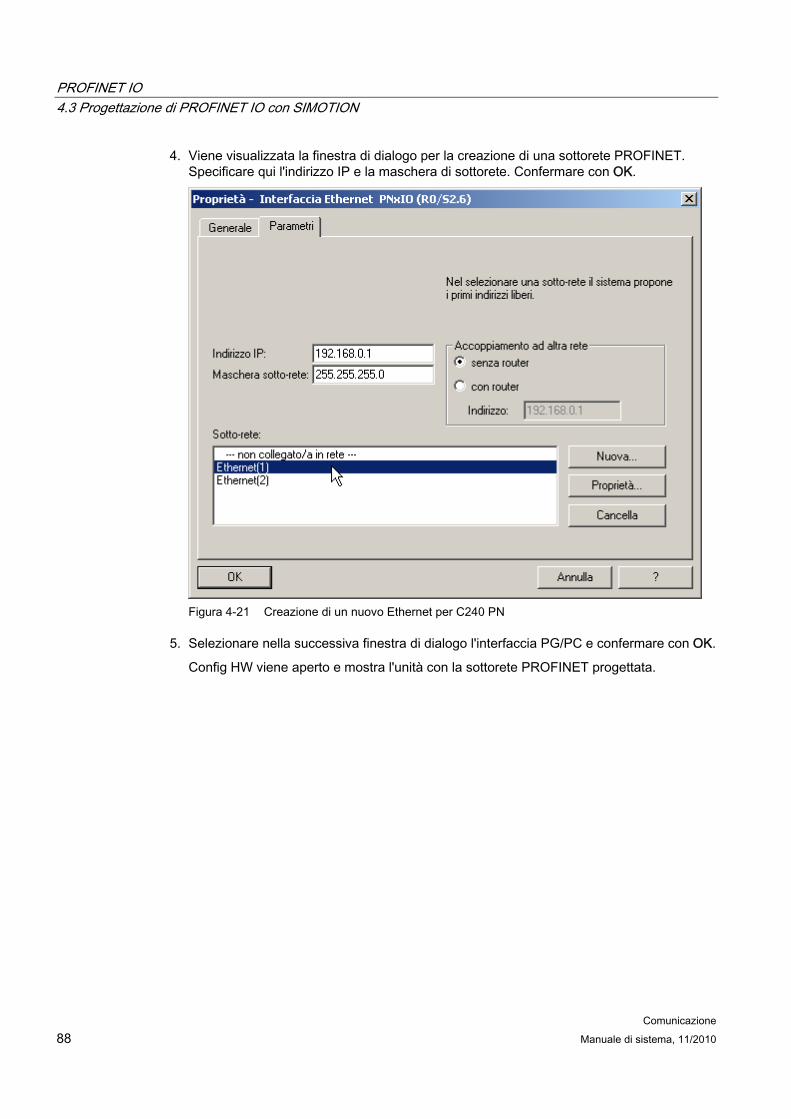
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 88 Manuale di sistema, 11/2010
4. Viene visualizzata la finestra di dialogo per la creazione di una sottorete PROFINET. Specificare qui l'indirizzo IP e la maschera di sottorete. Confermare con OK.
Figura 4-21 Creazione di un nuovo Ethernet per C240 PN
5. Selezionare nella successiva finestra di dialogo l'interfaccia PG/PC e confermare con OK.
Config HW viene aperto e mostra l'unità con la sottorete PROFINET progettata.
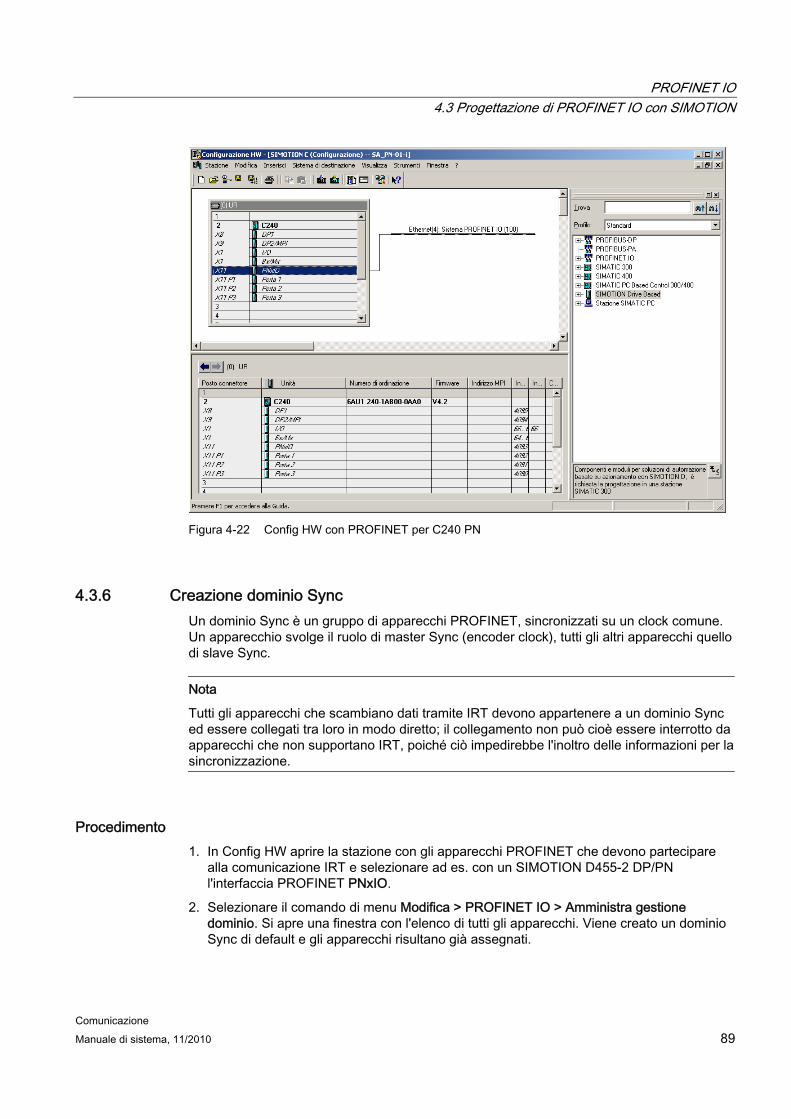
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 89
Figura 4-22 Config HW con PROFINET per C240 PN
4.3.6 Creazione dominio Sync Un dominio Sync è un gruppo di apparecchi PROFINET, sincronizzati su un clock comune. Un apparecchio svolge il ruolo di master Sync (encoder clock), tutti gli altri apparecchi quello di slave Sync.
Nota
Tutti gli apparecchi che scambiano dati tramite IRT devono appartenere a un dominio Sync ed essere collegati tra loro in modo diretto; il collegamento non può cioè essere interrotto da apparecchi che non supportano IRT, poiché ciò impedirebbe l'inoltro delle informazioni per la sincronizzazione.
Procedimento 1. In Config HW aprire la stazione con gli apparecchi PROFINET che devono partecipare
alla comunicazione IRT e selezionare ad es. con un SIMOTION D455-2 DP/PN l'interfaccia PROFINET PNxIO.
2. Selezionare il comando di menu Modifica > PROFINET IO > Amministra gestione dominio. Si apre una finestra con l'elenco di tutti gli apparecchi. Viene creato un dominio Sync di default e gli apparecchi risultano già assegnati.
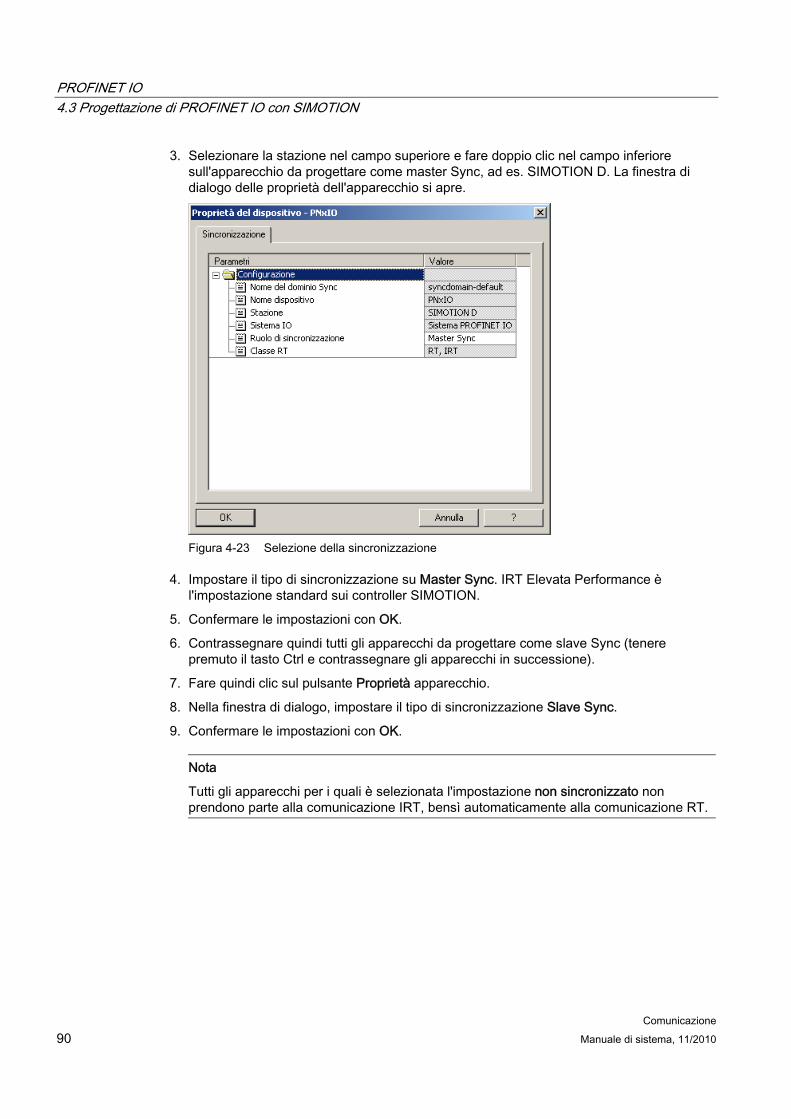
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 90 Manuale di sistema, 11/2010
3. Selezionare la stazione nel campo superiore e fare doppio clic nel campo inferiore sull'apparecchio da progettare come master Sync, ad es. SIMOTION D. La finestra di dialogo delle proprietà dell'apparecchio si apre.
Figura 4-23 Selezione della sincronizzazione
4. Impostare il tipo di sincronizzazione su Master Sync. IRT Elevata Performance è l'impostazione standard sui controller SIMOTION.
5. Confermare le impostazioni con OK.
6. Contrassegnare quindi tutti gli apparecchi da progettare come slave Sync (tenere premuto il tasto Ctrl e contrassegnare gli apparecchi in successione).
7. Fare quindi clic sul pulsante Proprietà apparecchio.
8. Nella finestra di dialogo, impostare il tipo di sincronizzazione Slave Sync.
9. Confermare le impostazioni con OK.
Nota
Tutti gli apparecchi per i quali è selezionata l'impostazione non sincronizzato non prendono parte alla comunicazione IRT, bensì automaticamente alla comunicazione RT.
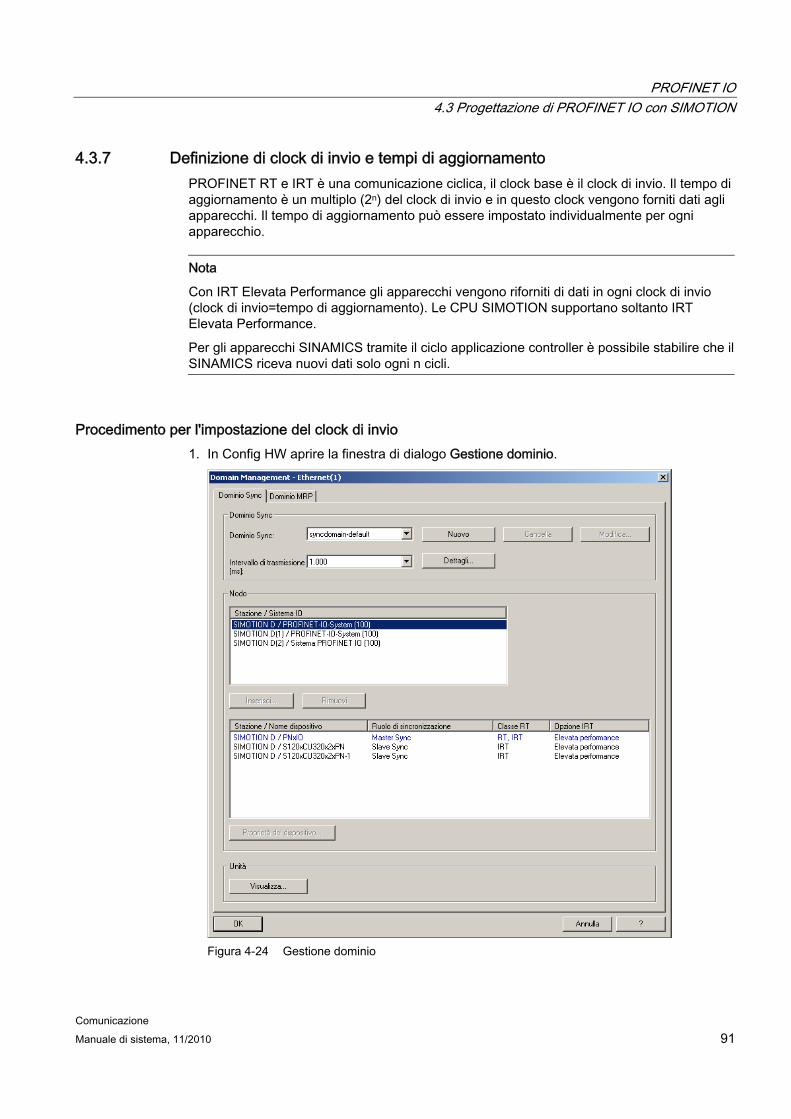
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 91
4.3.7 Definizione di clock di invio e tempi di aggiornamento PROFINET RT e IRT è una comunicazione ciclica, il clock base è il clock di invio. Il tempo di aggiornamento è un multiplo (2n) del clock di invio e in questo clock vengono forniti dati agli apparecchi. Il tempo di aggiornamento può essere impostato individualmente per ogni apparecchio.
Nota
Con IRT Elevata Performance gli apparecchi vengono riforniti di dati in ogni clock di invio (clock di invio=tempo di aggiornamento). Le CPU SIMOTION supportano soltanto IRT Elevata Performance.
Per gli apparecchi SINAMICS tramite il ciclo applicazione controller è possibile stabilire che il SINAMICS riceva nuovi dati solo ogni n cicli.
Procedimento per l'impostazione del clock di invio 1. In Config HW aprire la finestra di dialogo Gestione dominio.
Figura 4-24 Gestione dominio
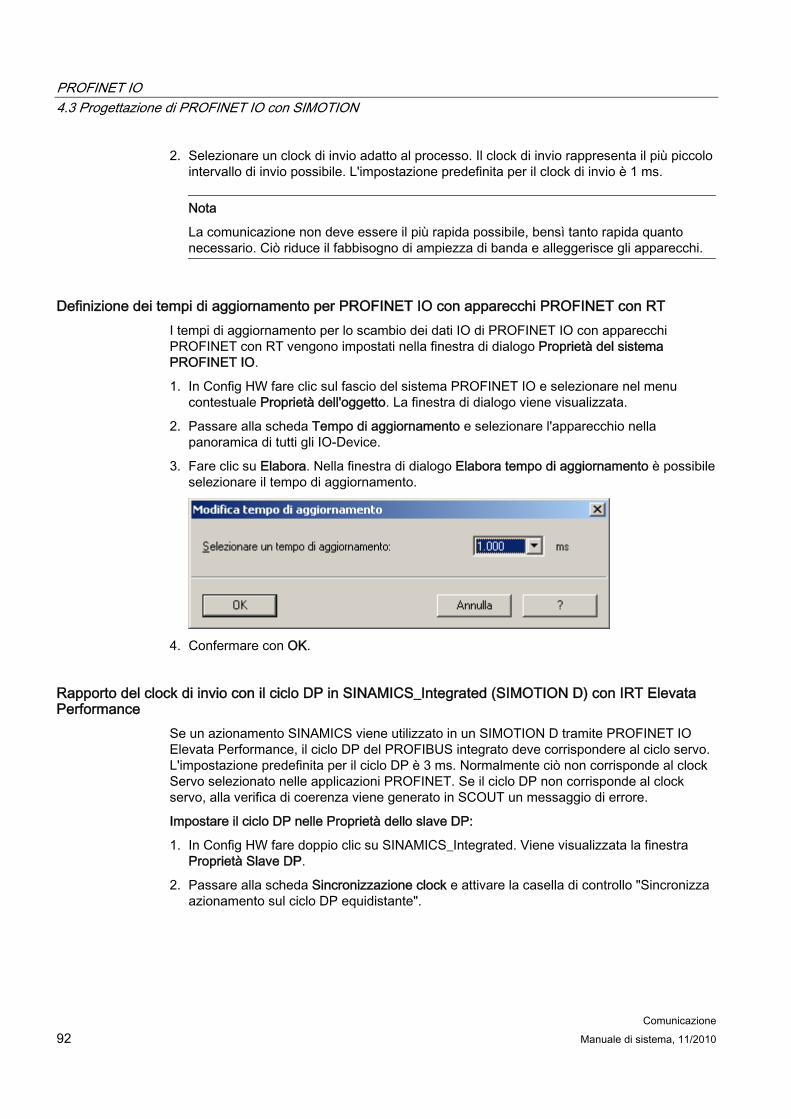
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 92 Manuale di sistema, 11/2010
2. Selezionare un clock di invio adatto al processo. Il clock di invio rappresenta il più piccolo intervallo di invio possibile. L'impostazione predefinita per il clock di invio è 1 ms.
Nota
La comunicazione non deve essere il più rapida possibile, bensì tanto rapida quanto necessario. Ciò riduce il fabbisogno di ampiezza di banda e alleggerisce gli apparecchi.
Definizione dei tempi di aggiornamento per PROFINET IO con apparecchi PROFINET con RT I tempi di aggiornamento per lo scambio dei dati IO di PROFINET IO con apparecchi PROFINET con RT vengono impostati nella finestra di dialogo Proprietà del sistema PROFINET IO.
1. In Config HW fare clic sul fascio del sistema PROFINET IO e selezionare nel menu contestuale Proprietà dell'oggetto. La finestra di dialogo viene visualizzata.
2. Passare alla scheda Tempo di aggiornamento e selezionare l'apparecchio nella panoramica di tutti gli IO-Device.
3. Fare clic su Elabora. Nella finestra di dialogo Elabora tempo di aggiornamento è possibile selezionare il tempo di aggiornamento.
4. Confermare con OK.
Rapporto del clock di invio con il ciclo DP in SINAMICS_Integrated (SIMOTION D) con IRT Elevata Performance
Se un azionamento SINAMICS viene utilizzato in un SIMOTION D tramite PROFINET IO Elevata Performance, il ciclo DP del PROFIBUS integrato deve corrispondere al ciclo servo. L'impostazione predefinita per il ciclo DP è 3 ms. Normalmente ciò non corrisponde al clock Servo selezionato nelle applicazioni PROFINET. Se il ciclo DP non corrisponde al clock servo, alla verifica di coerenza viene generato in SCOUT un messaggio di errore.
Impostare il ciclo DP nelle Proprietà dello slave DP:
1. In Config HW fare doppio clic su SINAMICS_Integrated. Viene visualizzata la finestra Proprietà Slave DP.
2. Passare alla scheda Sincronizzazione clock e attivare la casella di controllo "Sincronizza azionamento sul ciclo DP equidistante".
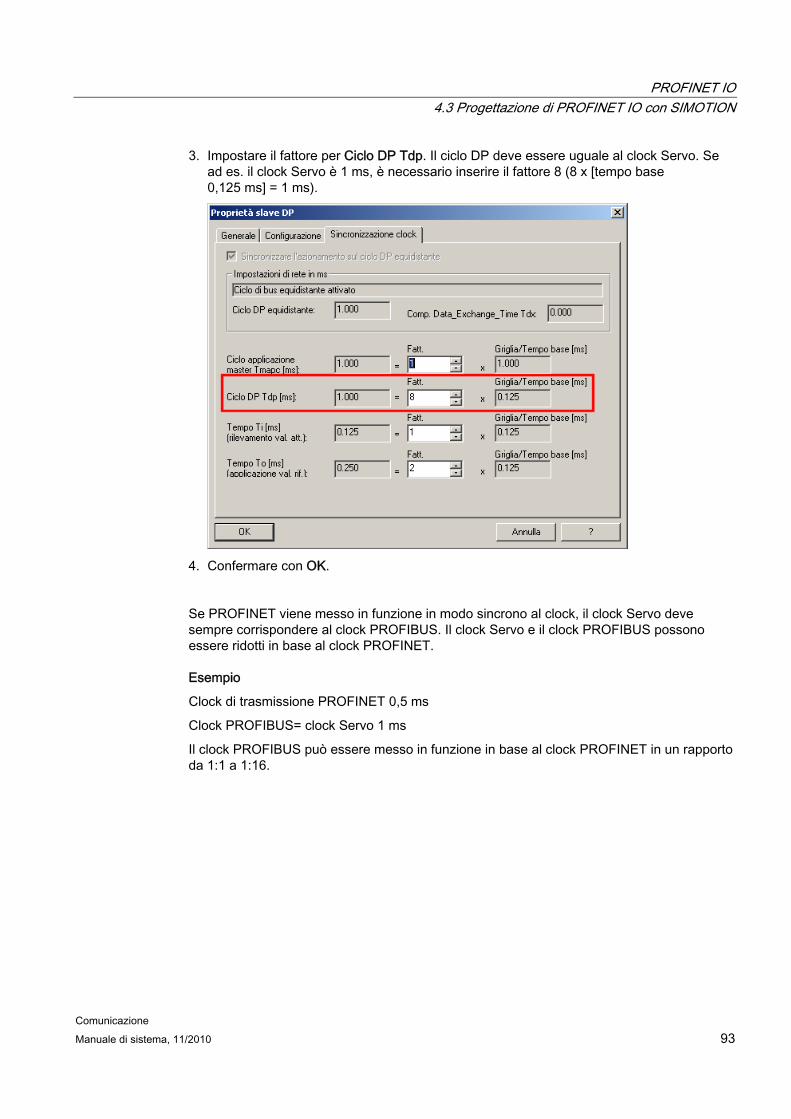
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 93
3. Impostare il fattore per Ciclo DP Tdp. Il ciclo DP deve essere uguale al clock Servo. Se ad es. il clock Servo è 1 ms, è necessario inserire il fattore 8 (8 x [tempo base 0,125 ms] = 1 ms).
4. Confermare con OK.
Se PROFINET viene messo in funzione in modo sincrono al clock, il clock Servo deve sempre corrispondere al clock PROFIBUS. Il clock Servo e il clock PROFIBUS possono essere ridotti in base al clock PROFINET.
Esempio
Clock di trasmissione PROFINET 0,5 ms
Clock PROFIBUS= clock Servo 1 ms
Il clock PROFIBUS può essere messo in funzione in base al clock PROFINET in un rapporto da 1:1 a 1:16.
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 94 Manuale di sistema, 11/2010
4.3.8 Servo_fast, riduzione di clock per il Servo nell'interfaccia PROFINET
Riduzione di clock da Servo a Servo_fast Con il secondo clock servo è possibile gestire due sistemi di bus in diversi clock dell'applicazione. Per entrambi i clock dell'applicazione sono disponibili un clock servo e un clock IPO assegnato. In questo modo è possibile suddividere l'applicazione in un clock lento e in un clock rapido (Servo_fast e IPO_fast).
● La periferia nel sistema di bus rapido viene utilizzata con sincronismo di clock nel clock Servo_fast/IPO_fast rapido.
● La periferia nel sistema di bus lento viene utilizzata con sincronismo di clock nel clock Servo/IPO/IPO_2 lento.
Possibilità dell'uso con sincronismo di clock Per l'uso con sincronismo di clock in Config HW, nell'unità I/O viene impostato il ciclo dell'applicazione:
● Per slave DP viene impostato il MACF (ciclo dell'applicazione master). Se si utilizza anche PROFINET IO, viene supportato solo MACF=1. Tutti gli apparecchi PROFIBUS funzionano nel clock servo lento.
● Per i dispositivi I/O viene impostato il CACF (Controller Application Cycle Factor). A partire da V4.2 nei dispositivi IO è possibile selezionare in aggiunta il clock servo (Servo_fast).
Sono possibili le seguenti impostazioni:
Ciclo dell'applicazione degli apparecchi in Versione Proprietà
PROFINET IO PROFIBUS DP Fino alla versione V4.2 1 clock servo Servo Servo V4.2 2 clock servo Servo_fast Servo
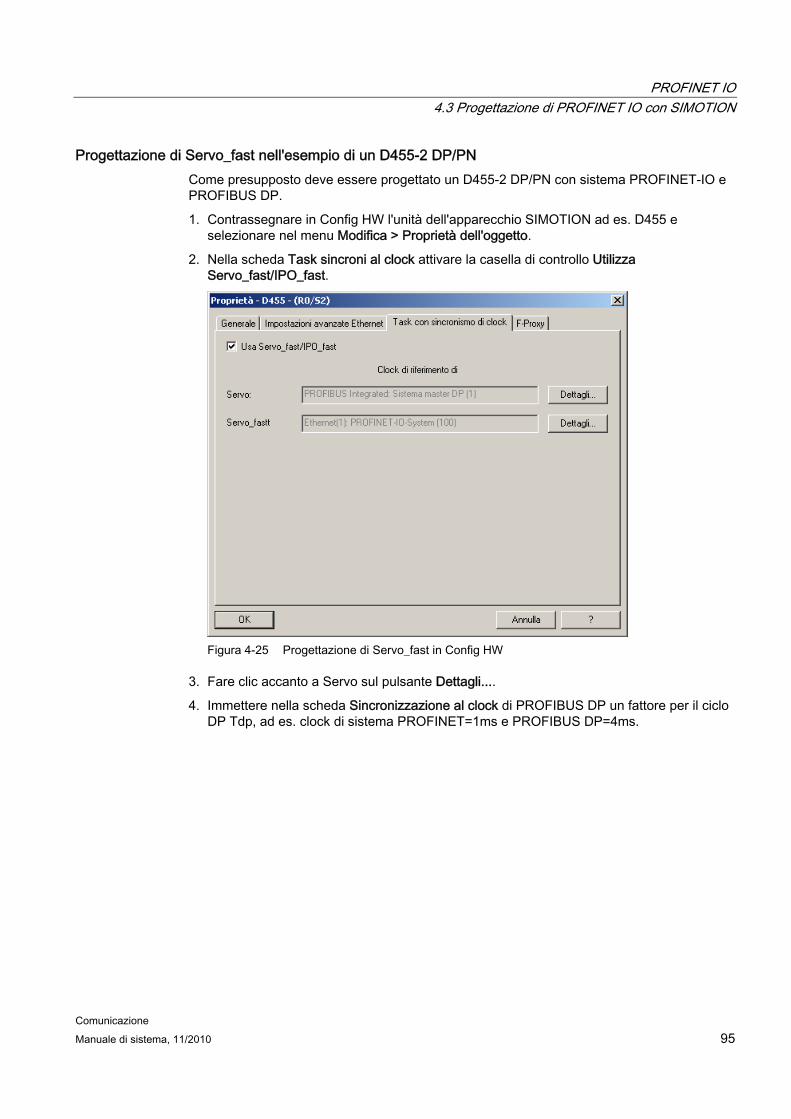
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 95
Progettazione di Servo_fast nell'esempio di un D455-2 DP/PN Come presupposto deve essere progettato un D455-2 DP/PN con sistema PROFINET-IO e PROFIBUS DP.
1. Contrassegnare in Config HW l'unità dell'apparecchio SIMOTION ad es. D455 e selezionare nel menu Modifica > Proprietà dell'oggetto.
2. Nella scheda Task sincroni al clock attivare la casella di controllo Utilizza Servo_fast/IPO_fast.
Figura 4-25 Progettazione di Servo_fast in Config HW
3. Fare clic accanto a Servo sul pulsante Dettagli....
4. Immettere nella scheda Sincronizzazione al clock di PROFIBUS DP un fattore per il ciclo DP Tdp, ad es. clock di sistema PROFINET=1ms e PROFIBUS DP=4ms.
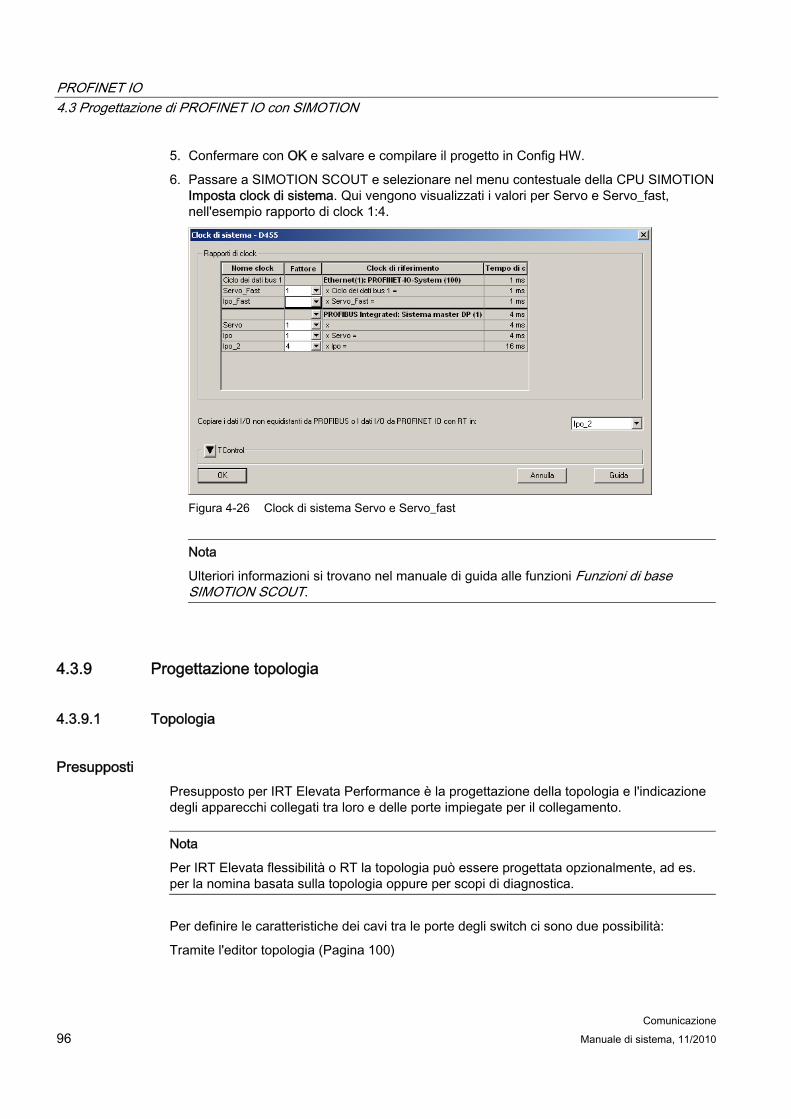
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 96 Manuale di sistema, 11/2010
5. Confermare con OK e salvare e compilare il progetto in Config HW.
6. Passare a SIMOTION SCOUT e selezionare nel menu contestuale della CPU SIMOTION Imposta clock di sistema. Qui vengono visualizzati i valori per Servo e Servo_fast, nell'esempio rapporto di clock 1:4.
Figura 4-26 Clock di sistema Servo e Servo_fast
Nota
Ulteriori informazioni si trovano nel manuale di guida alle funzioni Funzioni di base SIMOTION SCOUT.
4.3.9 Progettazione topologia
4.3.9.1 Topologia
Presupposti Presupposto per IRT Elevata Performance è la progettazione della topologia e l'indicazione degli apparecchi collegati tra loro e delle porte impiegate per il collegamento.
Nota
Per IRT Elevata flessibilità o RT la topologia può essere progettata opzionalmente, ad es. per la nomina basata sulla topologia oppure per scopi di diagnostica.
Per definire le caratteristiche dei cavi tra le porte degli switch ci sono due possibilità:
Tramite l'editor topologia (Pagina 100)
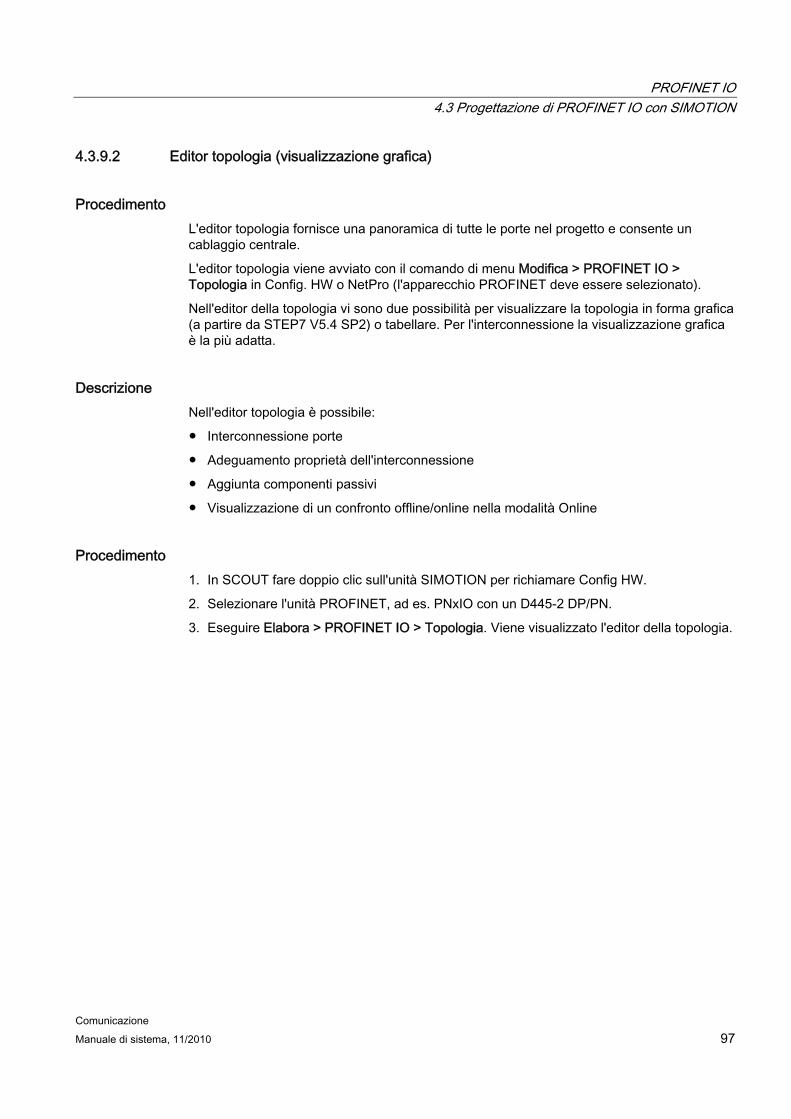
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 97
4.3.9.2 Editor topologia (visualizzazione grafica)
Procedimento L'editor topologia fornisce una panoramica di tutte le porte nel progetto e consente un cablaggio centrale.
L'editor topologia viene avviato con il comando di menu Modifica > PROFINET IO > Topologia in Config. HW o NetPro (l'apparecchio PROFINET deve essere selezionato).
Nell'editor della topologia vi sono due possibilità per visualizzare la topologia in forma grafica (a partire da STEP7 V5.4 SP2) o tabellare. Per l'interconnessione la visualizzazione grafica è la più adatta.
Descrizione Nell'editor topologia è possibile:
● Interconnessione porte
● Adeguamento proprietà dell'interconnessione
● Aggiunta componenti passivi
● Visualizzazione di un confronto offline/online nella modalità Online
Procedimento 1. In SCOUT fare doppio clic sull'unità SIMOTION per richiamare Config HW.
2. Selezionare l'unità PROFINET, ad es. PNxIO con un D445-2 DP/PN.
3. Eseguire Elabora > PROFINET IO > Topologia. Viene visualizzato l'editor della topologia.
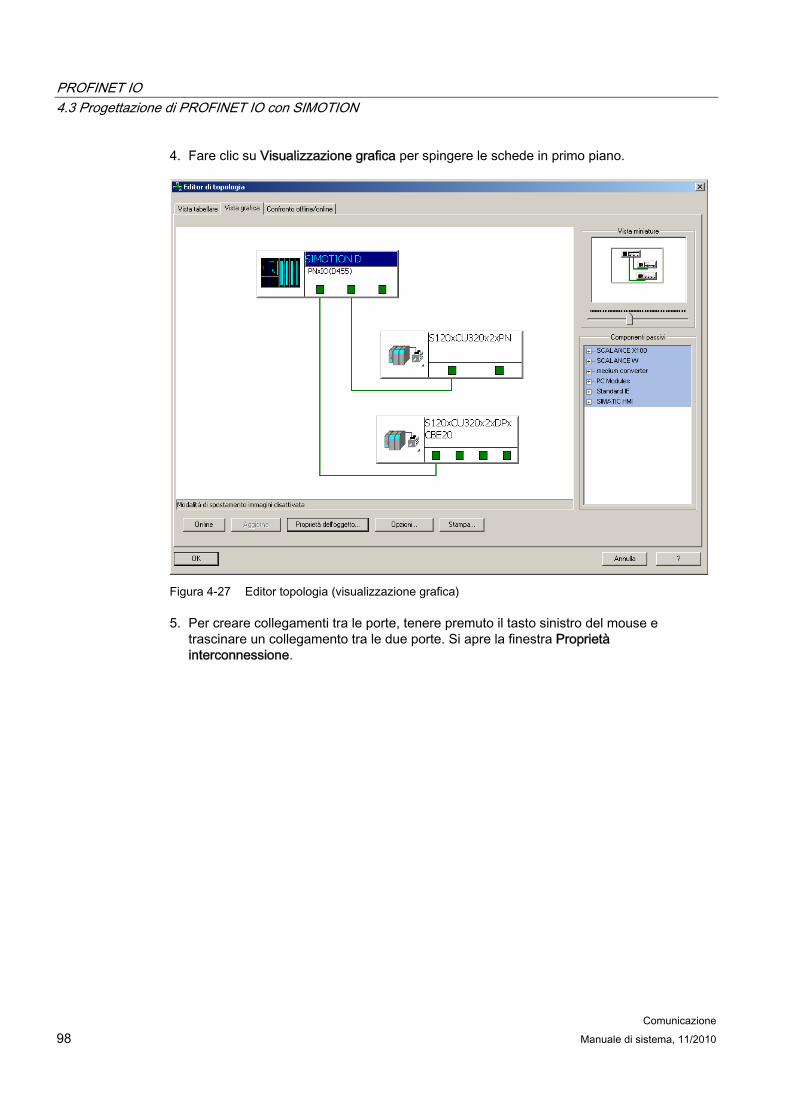
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 98 Manuale di sistema, 11/2010
4. Fare clic su Visualizzazione grafica per spingere le schede in primo piano.
Figura 4-27 Editor topologia (visualizzazione grafica)
5. Per creare collegamenti tra le porte, tenere premuto il tasto sinistro del mouse e trascinare un collegamento tra le due porte. Si apre la finestra Proprietà interconnessione.
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 99
6. Viene visualizzata l'interconnessione delle porte. I dati dei cavi possono essere progettati. Di default viene impostata una lunghezza dei cavi consigliata <100 m. In alternativa è possibile progettare il runtime del segnale.
7. Confermare con OK.
Confronto offline/online Se si passa alla modalità Online la topologia nell'editor viene confrontata con la topologia reale. I componenti non noti vengono mostrati con punti di domanda, i collegamenti e i componenti in stato RUN vengono evidenziati in verde.
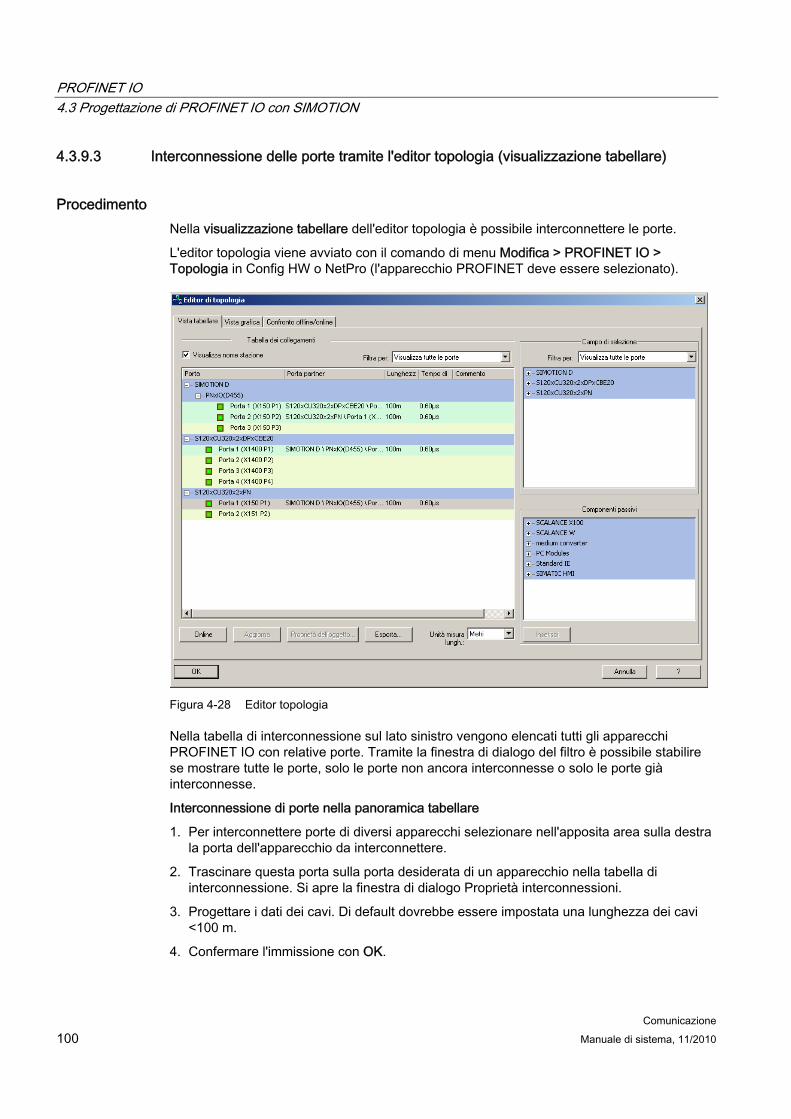
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 100 Manuale di sistema, 11/2010
4.3.9.3 Interconnessione delle porte tramite l'editor topologia (visualizzazione tabellare)
Procedimento Nella visualizzazione tabellare dell'editor topologia è possibile interconnettere le porte.
L'editor topologia viene avviato con il comando di menu Modifica > PROFINET IO > Topologia in Config HW o NetPro (l'apparecchio PROFINET deve essere selezionato).
Figura 4-28 Editor topologia
Nella tabella di interconnessione sul lato sinistro vengono elencati tutti gli apparecchi PROFINET IO con relative porte. Tramite la finestra di dialogo del filtro è possibile stabilire se mostrare tutte le porte, solo le porte non ancora interconnesse o solo le porte già interconnesse.
Interconnessione di porte nella panoramica tabellare
1. Per interconnettere porte di diversi apparecchi selezionare nell'apposita area sulla destra la porta dell'apparecchio da interconnettere.
2. Trascinare questa porta sulla porta desiderata di un apparecchio nella tabella di interconnessione. Si apre la finestra di dialogo Proprietà interconnessioni.
3. Progettare i dati dei cavi. Di default dovrebbe essere impostata una lunghezza dei cavi <100 m.
4. Confermare l'immissione con OK.
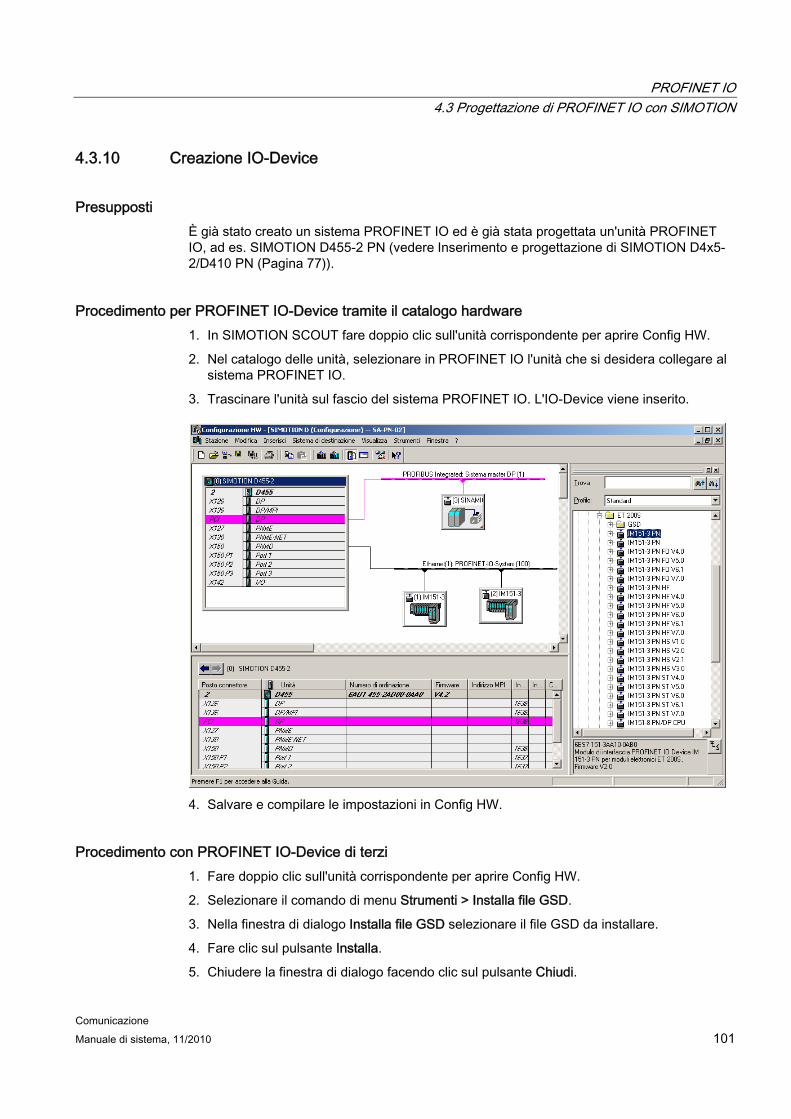
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 101
4.3.10 Creazione IO-Device
Presupposti È già stato creato un sistema PROFINET IO ed è già stata progettata un'unità PROFINET IO, ad es. SIMOTION D455-2 PN (vedere Inserimento e progettazione di SIMOTION D4x5-2/D410 PN (Pagina 77)).
Procedimento per PROFINET IO-Device tramite il catalogo hardware 1. In SIMOTION SCOUT fare doppio clic sull'unità corrispondente per aprire Config HW.
2. Nel catalogo delle unità, selezionare in PROFINET IO l'unità che si desidera collegare al sistema PROFINET IO.
3. Trascinare l'unità sul fascio del sistema PROFINET IO. L'IO-Device viene inserito.
4. Salvare e compilare le impostazioni in Config HW.
Procedimento con PROFINET IO-Device di terzi 1. Fare doppio clic sull'unità corrispondente per aprire Config HW.
2. Selezionare il comando di menu Strumenti > Installa file GSD.
3. Nella finestra di dialogo Installa file GSD selezionare il file GSD da installare.
4. Fare clic sul pulsante Installa.
5. Chiudere la finestra di dialogo facendo clic sul pulsante Chiudi.
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 102 Manuale di sistema, 11/2010
6. Nel catalogo delle unità, selezionare in PROFINET IO l'unità che si desidera collegare al sistema PROFINET IO.
7. Trascinare l'unità sul fascio del sistema PROFINET IO. L'IO-Device viene inserito.
8. Salvare e compilare le impostazioni in Config HW.
4.3.11 Inserimento e progettazione di SINAMICS S120
Presupposti Nel progetto sono stati inseriti un SIMOTION D4x5-2 con interfaccia PROFINET integrata, è già stata creata una sottorete PROFINET IO ed il master Sync è progettato.
Nota
La progettazione è quasi identica per tutti gli apparecchi SINAMICS S120 e SIMOTION D.
Procedimento 1. Selezionare nel catalogo hardware di Config HW la voce PROFINET IO > Drives >
SINAMICS , quindi l'unità, ad es.SINAMICS S120 CU320-2 PN.
2. Fare clic sulla voce e trascinare l'azionamento, ad es. V4.4 sulla sottorete PROFINET IO. Si apre la finestra Proprietà - Interfaccia Ethernet SINAMICS-S120xCU320x2xPN. Qui vi è già un indirizzo IP proposto e la sottorete è selezionata.
3. Fare clic su OK per applicare le impostazioni.
4. In Config HW selezionare Stazione > Salva e compila le modifiche.
Impostazione del telegramma in SIMOTION SCOUT da V4.2 Per la comunicazione sincrona a sincronismo di clock è necessario progettare un telegramma (ad es. telegramma 105) che consenta una sincronizzazione dell'azionamento su PROFINET. Il telegramma viene impostato automaticamente in SCOUT con la configurazione dell'apparecchio di azionamento e dopo l'assegnazione di un asse.
1. In SCOUT fare clic nella navigazione, quindi passare all'apparecchio di azionamento e fare clic su Configura apparecchio di azionamento, qualora non si fossero ancora progettati alimentazione e azionamento.
2. Eseguire il wizard per la configurazione dell'apparecchio di azionamento.
3. Dopo aver chiuso il wizard, fare clic nella navigazione di progetto sotto all'apparecchio di azionamento su Comunicazione > Configurazione telegrammi. Nella scheda IF1: PROFIdrive telegrammi PZD sono elencati i telegrammi. Un telegramma non è ancora progettato dopo la messa in servizio dell'azionamento.
4. Immettere pertanto un nuovo TO asse ed eseguire il wizard assi. Nel wizard interconnettere l'asse al corrispondente oggetto di azionamento dell'S120 ed automaticamente viene creato un corrispondente telegramma (assegnazione simbolica).
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 103
5. Selezionare il menu Progetto > Salva e compila tutto. Nell'assegnazione simbolica gli indirizzi vengono configurati automaticamente. Tramite la voce di menu Progetto > Configura indirizzi è possibile avviare l'assegnazione simbolica degli indirizzi.
6. Dopo aver terminato la configurazione dell'asse, fare clic nella navigazione di progetto sotto all'apparecchio di azionamento su Comunicazione > Configurazione telegrammi. Nella scheda IF1: Telegramma PZD PROFIdrive è ora riportato con l'azionamento il telegramma (ad es. telegramma SIEMENS 105).
Telegramma in Config HW In alternativa è possibile assegnare il telegramma anche in Config HW. A tale scopo l'apparecchio di azionamento e l'azionamento in SCOUT devono essere già progettati. Successivamente è possibile procedere in Config HW come segue.
Nota
Per l'interconnessione dei telegrammi si raccomanda l'assegnazione simbolica in SIMOTION SCOUT. Osservare a riguardo che nel menu sotto Progetto > Utilizza assegnazione simbolica venga impostato un segno di spunta.
Se si utilizza l'assegnazione simbolica, la gestione del telegramma tra SIMOTION e i DO azionamento avviene interamente sotto il controllo di SCOUT. Ciò significa che SCOUT genera autonomamente telegrammi che contengono tutti i segnali necessari in base alla progettazione tecnologica. Il posizionamento dei segnali nel telegramma e la dimensione del telegramma vengono gestiti automaticamente da SCOUT e non possono più essere influenzati o modificati dall'utente.
1. Selezionare l'azionamento SINAMICS inserito e fare doppio clic nella tabella sottostante nell'azionamento sulla voce SIEMENS / Telegramma standard xx. Viene richiamata la finestra di dialogo Proprietà SIEMENS / Telegramma standard xx.
2. Selezionare il telegramma corrispondente. Dopo il salvataggio il telegramma può essere anche selezionato in SCOUT nella navigazione di progetto alla voce <"Apparecchio di azionamento_xx"> - Comunicazione > Configurazione telegrammi. Un'uniformazione con Config HW è possibile.
Impostazioni per sincronismo al clock (a partire da V4.2) Per il sincronismo al clock l'apparecchio di azionamento deve sincronizzarsi al clock di PROFINET. Queste impostazioni si eseguono sull'interfaccia PN dell'apparecchio di azionamento e sull'apparecchio SIMOTION (master Sync).
Impostazioni sull'apparecchio SIMOTION (master Sync)
1. Contrassegnare in Config HW l'unità dell'apparecchio SIMOTION ad es. D455 e selezionare nel menu Modifica > Proprietà dell'oggetto.
2. Nella scheda Task sincroni al clock fare clic sul pulsante Dettagli....
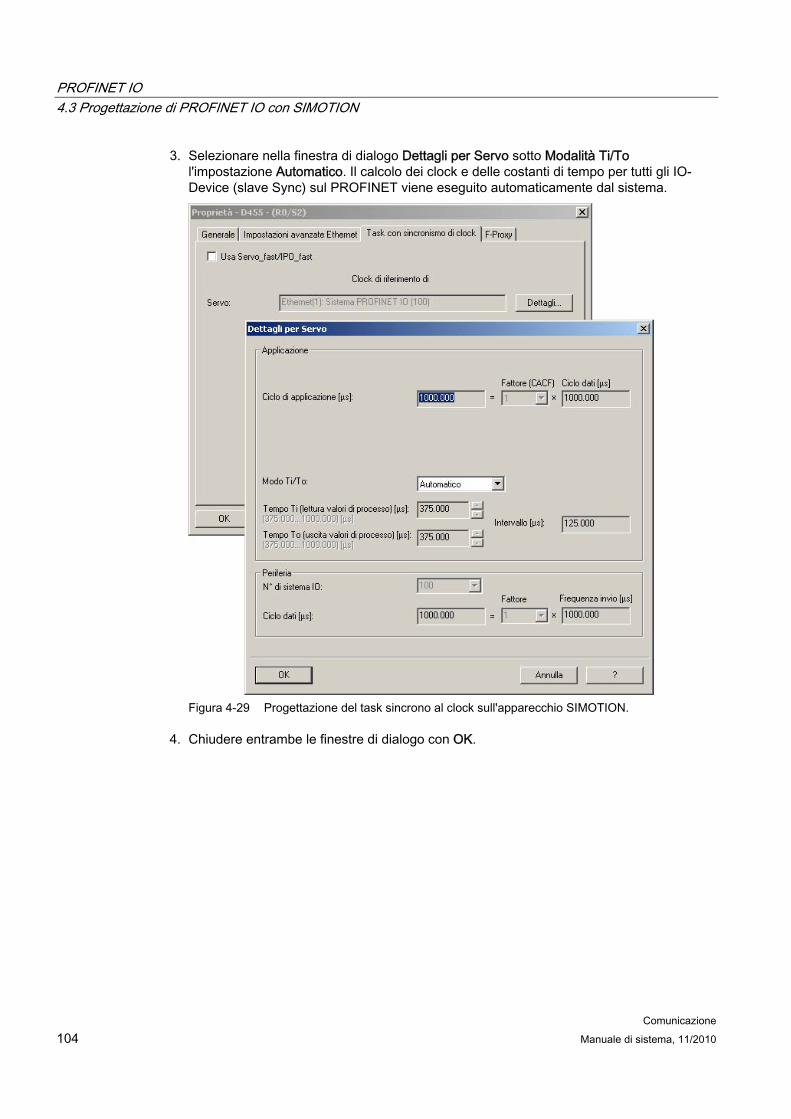
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 104 Manuale di sistema, 11/2010
3. Selezionare nella finestra di dialogo Dettagli per Servo sotto Modalità Ti/To l'impostazione Automatico. Il calcolo dei clock e delle costanti di tempo per tutti gli IO-Device (slave Sync) sul PROFINET viene eseguito automaticamente dal sistema.
Figura 4-29 Progettazione del task sincrono al clock sull'apparecchio SIMOTION.
4. Chiudere entrambe le finestre di dialogo con OK.
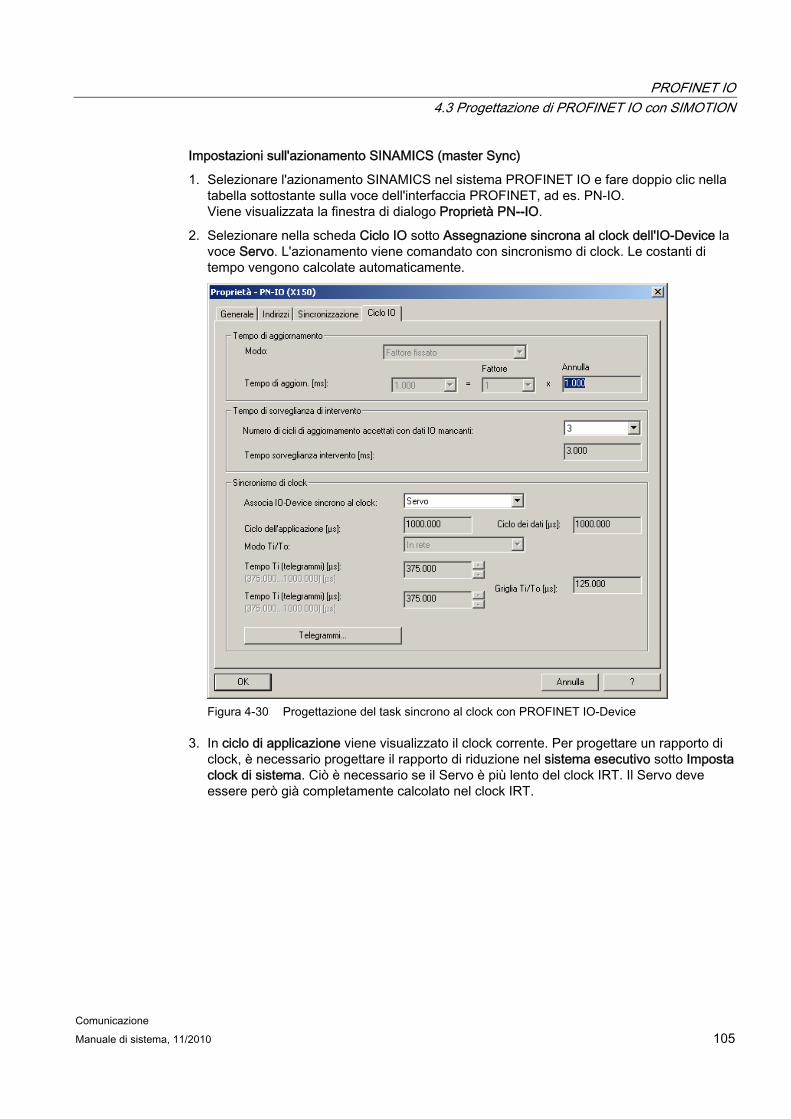
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 105
Impostazioni sull'azionamento SINAMICS (master Sync)
1. Selezionare l'azionamento SINAMICS nel sistema PROFINET IO e fare doppio clic nella tabella sottostante sulla voce dell'interfaccia PROFINET, ad es. PN-IO. Viene visualizzata la finestra di dialogo Proprietà PN--IO.
2. Selezionare nella scheda Ciclo IO sotto Assegnazione sincrona al clock dell'IO-Device la voce Servo. L'azionamento viene comandato con sincronismo di clock. Le costanti di tempo vengono calcolate automaticamente.
Figura 4-30 Progettazione del task sincrono al clock con PROFINET IO-Device
3. In ciclo di applicazione viene visualizzato il clock corrente. Per progettare un rapporto di clock, è necessario progettare il rapporto di riduzione nel sistema esecutivo sotto Imposta clock di sistema. Ciò è necessario se il Servo è più lento del clock IRT. Il Servo deve essere però già completamente calcolato nel clock IRT.
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 106 Manuale di sistema, 11/2010
4. Passare eventualmente alla scheda Sincronizzazione per selezionare il Tipo di sincronizzazione, in questo caso Slave Sync. Ciò può essere impostato anche in Gestione dominio.
5. Confermare le immissioni con OK.
Nota
Gli ulteriori passaggi di lavoro servono per integrare l'azionamento nel dominio Sync (vedere capitolo Creazione dominio Sync), caricare l'indirizzo IP nell'azionamento, vedere Assegnazione di nomi apparecchio e indirizzi IP per IO-Device (Pagina 108)e interconnettere le porte (vedere Interconnessione delle porte tramite l'editor topologia (visualizzazione tabellare) (Pagina 100)).
Vedere anche Creazione dominio Sync (Pagina 89)
4.3.12 Indirizzo IP e nome di comunicazione
Presupposti Un apparecchio o un controller possiede un indirizzo MAC fisso, un indirizzo IP progettabile e un nome di comunicazione. L'indirizzo IP, la maschera di sottorete e il nome di comunicazione vengono definiti nel sistema di engineering nell'interfaccia Ethernet. In questo modo gli apparecchi nel progetto dispongono di un'assegnazione univoca.
Il nome di comunicazione (nome apparecchio) è disponibile nella finestra di dialogo Proprietà - Interfaccia, facendo doppio clic sull'apparecchio o sul controller. Nella finestra di dialogo fare clic su Proprietà per definire l'indirizzo IP. Vedere anche Inserimento e progettazione della scheda PROFINET CBE30 (Pagina 82).
Linee guida per il nome di comunicazione Per il Device il nome di comunicazione è uguale a quello dell'apparecchio, ad es. Drive1 per un azionamento. Per i controller il nome di comunicazione è quello dell'interfaccia PROFINET, ad es. CBE30xPNxIO per un CBE30 in SIMOTION D.
Per i nomi di comunicazione sono previste determinate regole sintattiche; essi devono essere cioè sostanzialmente conformi a DHCP. Per SIMOTION e SIMATIC esistono anche ulteriori condizioni quadro.
● Lettere e numeri sono consentiti, a-z e 0-9
● Nessun carattere speciale ! " § $ % & / ( ) = ? * ' _ : ; > < , # + | ~ \ } ] [ {
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 107
● Il nome può essere composto da varie parti
– Etichetta.Etichetta.Etichetta.Etichetta
– Il punto funge da carattere di separazione
– L'etichetta deve iniziare e terminare con una lettera
– La lunghezza massima dell'etichetta è 63 caratteri
– Le etichette non possono cominciare con "xn-"
● La lunghezza complessiva massima del nome è 240 caratteri
● Nomi riservati "port-xyz" o "port-xyz-abcde"
● Le maiuscole e le minuscole non vengono differenziate. Poiché nel sistema di engineering tutti i nomi vengono visualizzati con le minuscole, preferirle alle maiuscole.
● In relazione a SCOUT non è possibile utilizzare il segno meno "-".
● I caratteri non consentiti vengono sostituiti dal sistema di engineering con una x.
Nomina di controller e Device nella modalità Online
Il controller e i Device allo stato di fornitura non possiedono ancora nessun nome di comunicazione e nessun indirizzo IP, quindi per prima cosa è necessario procedere alla loro assegnazione. Per l'assegnazione dell'indirizzo e del nome di comunicazione (nomina) viene operata una distinzione tra controller e Device. Device e controller possono essere nominati in diversi modi.
Nomina controller
● Download dell'applicazione
● Engineering Software
– Config HW, NetPro, SCOUT
– Primary Setup Tool (PST)
● Tramite l'applicazione (funzione di sistema _setNameofStation per SIMOTION)
Nota
Per la nomina con il software di engineering negli impianti di grandi dimensioni è necessario effettuare il collegamento diretto con l'apparecchio, affinché l'apparecchio da nominare venga identificato in modo univoco. In alternativa è disponibile la funzione Lampeggia, che consente di identificare l'apparecchio tramite un LED lampeggiante.
Nomina Device
● Engineering Software
– Config HW, NetPro
– SCOUT, Starter
– Primary Setup Tool (PST)
● Per prima cosa scrivere sulla scheda MMC o CF, quindi inserire
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 108 Manuale di sistema, 11/2010
Nomina basata sulla topologia per Device
La nomina dei Device può avvenire anche senza scheda MMC o CF. Si parla in tal caso di nomina basata sulla topologia. Questa caratteristica viene supportata solo da determinate versioni software.
● SIMATIC S7-300 FW ≥ V 2.7
● SIMATIC S7-400 FW ≥ V 5.2
● SIMOTION FW ≥ V4.1.2 con PN V2.2
● SINAMICS FW ≥ V2.5.1.10 con PN V2.2
● ET200S FW ≥ 6.0
● ET200S HS FW ≥ 2.0
4.3.13 Assegnazione di nomi apparecchio e indirizzi IP per IO-Device
Presupposti Per poter accedere online a un apparecchio (controller o Device) con il sistema di engineering è necessario assegnare all'apparecchio un indirizzo IP nel sistema di engineering. Inoltre gli apparecchi devono ricevere un nome di comunicazione univoco nella rete. Tale nome è necessario affinché il controller possa identificare i Device che gli vengono assegnati.
L'indirizzo IP può essere definito nella finestra di dialogo Proprietà - Interfaccia Ethernet … (per aprire la finestra fare doppio clic sull'apparecchio). Inoltre viene normalmente inserito un nome apparecchio modificabile. Quale standard l'impostazione Assegna indirizzo IP tramite controller è attiva. All'avvio il controller identifica i Device collegati tramite i nomi apparecchio e assegna loro l'indirizzo IP definito nel sistema di engineering. Si consiglia di non disattivare questa funzione.
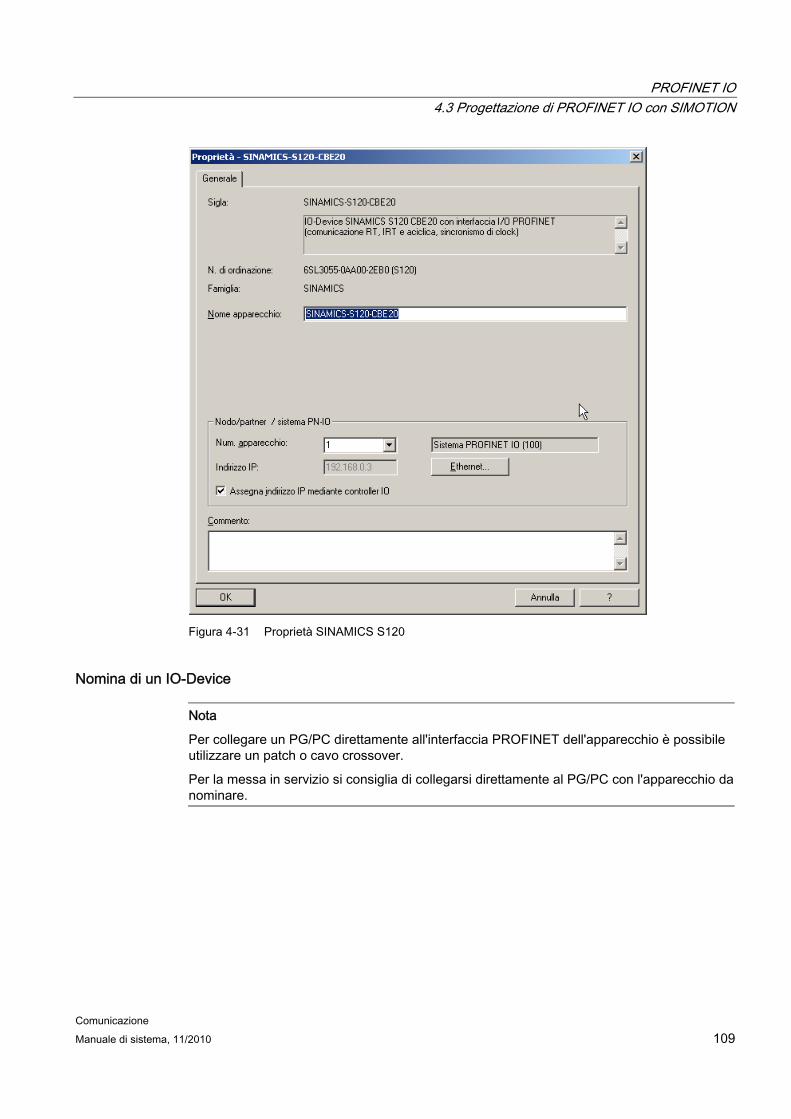
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 109
Figura 4-31 Proprietà SINAMICS S120
Nomina di un IO-Device
Nota
Per collegare un PG/PC direttamente all'interfaccia PROFINET dell'apparecchio è possibile utilizzare un patch o cavo crossover.
Per la messa in servizio si consiglia di collegarsi direttamente al PG/PC con l'apparecchio da nominare.
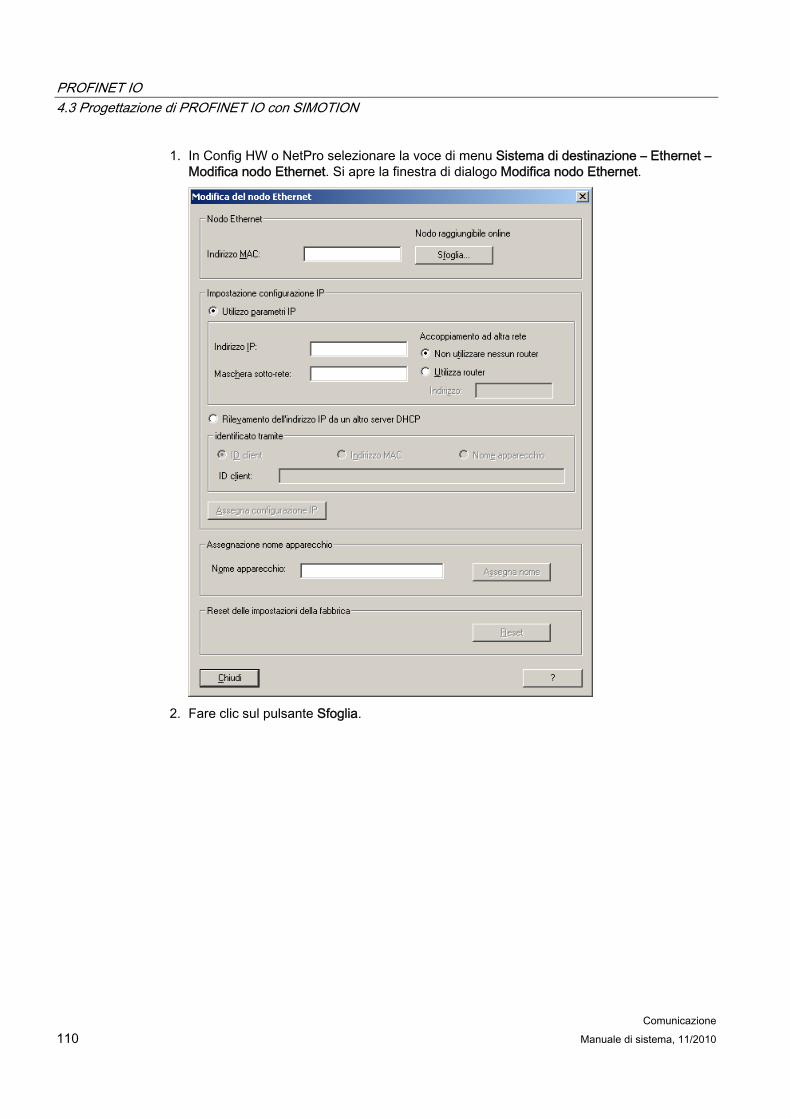
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 110 Manuale di sistema, 11/2010
1. In Config HW o NetPro selezionare la voce di menu Sistema di destinazione – Ethernet –Modifica nodo Ethernet. Si apre la finestra di dialogo Modifica nodo Ethernet.
2. Fare clic sul pulsante Sfoglia.
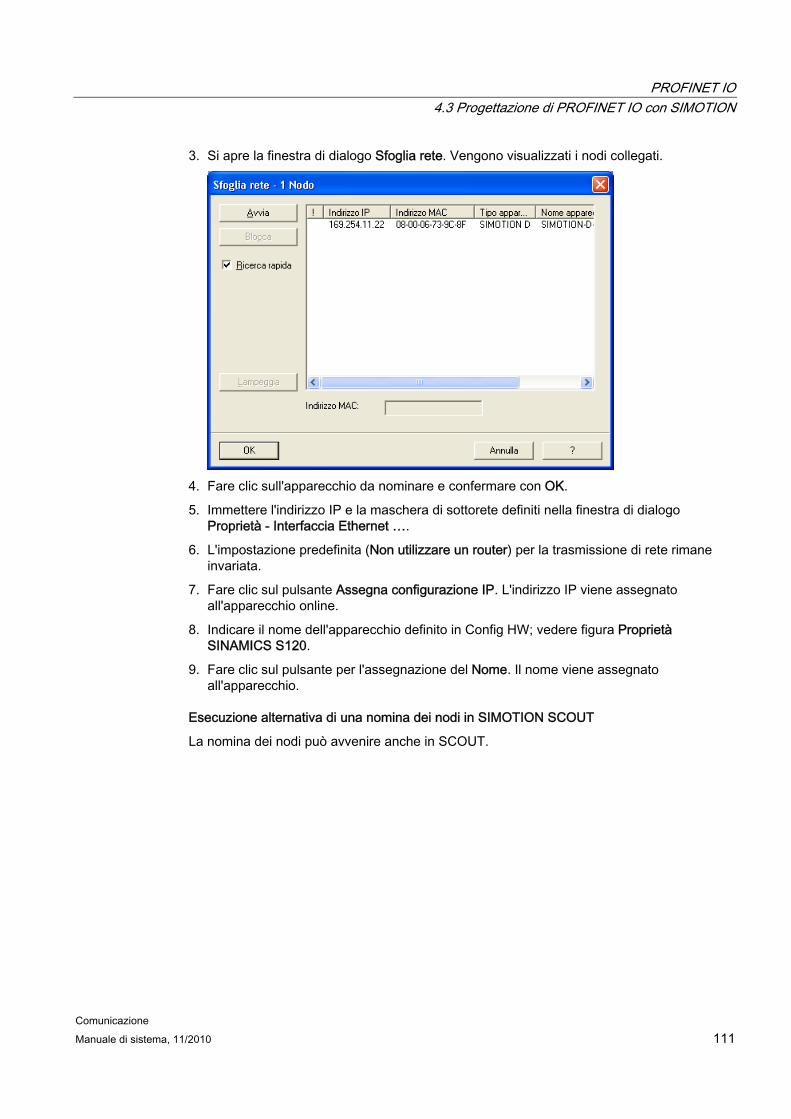
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 111
3. Si apre la finestra di dialogo Sfoglia rete. Vengono visualizzati i nodi collegati.
4. Fare clic sull'apparecchio da nominare e confermare con OK.
5. Immettere l'indirizzo IP e la maschera di sottorete definiti nella finestra di dialogo Proprietà - Interfaccia Ethernet ….
6. L'impostazione predefinita (Non utilizzare un router) per la trasmissione di rete rimane invariata.
7. Fare clic sul pulsante Assegna configurazione IP. L'indirizzo IP viene assegnato all'apparecchio online.
8. Indicare il nome dell'apparecchio definito in Config HW; vedere figura Proprietà SINAMICS S120.
9. Fare clic sul pulsante per l'assegnazione del Nome. Il nome viene assegnato all'apparecchio.
Esecuzione alternativa di una nomina dei nodi in SIMOTION SCOUT
La nomina dei nodi può avvenire anche in SCOUT.
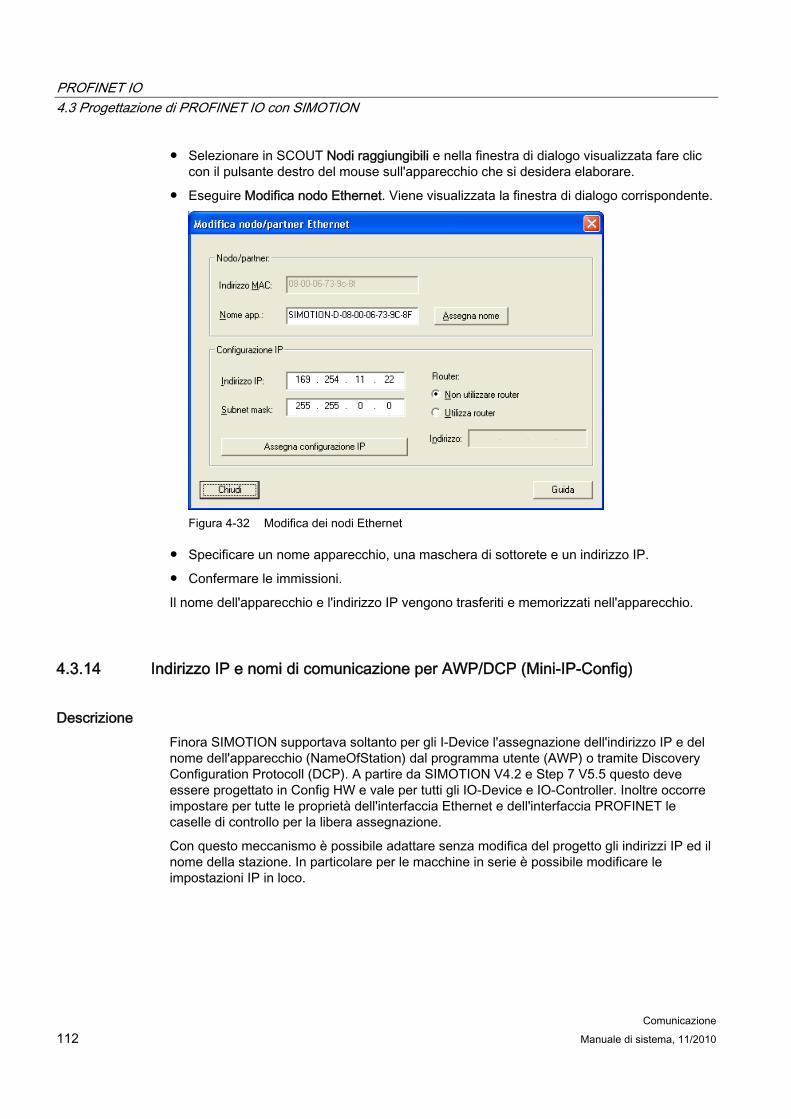
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 112 Manuale di sistema, 11/2010
● Selezionare in SCOUT Nodi raggiungibili e nella finestra di dialogo visualizzata fare clic con il pulsante destro del mouse sull'apparecchio che si desidera elaborare.
● Eseguire Modifica nodo Ethernet. Viene visualizzata la finestra di dialogo corrispondente.
Figura 4-32 Modifica dei nodi Ethernet
● Specificare un nome apparecchio, una maschera di sottorete e un indirizzo IP.
● Confermare le immissioni.
Il nome dell'apparecchio e l'indirizzo IP vengono trasferiti e memorizzati nell'apparecchio.
4.3.14 Indirizzo IP e nomi di comunicazione per AWP/DCP (Mini-IP-Config)
Descrizione Finora SIMOTION supportava soltanto per gli I-Device l'assegnazione dell'indirizzo IP e del nome dell'apparecchio (NameOfStation) dal programma utente (AWP) o tramite Discovery Configuration Protocoll (DCP). A partire da SIMOTION V4.2 e Step 7 V5.5 questo deve essere progettato in Config HW e vale per tutti gli IO-Device e IO-Controller. Inoltre occorre impostare per tutte le proprietà dell'interfaccia Ethernet e dell'interfaccia PROFINET le caselle di controllo per la libera assegnazione.
Con questo meccanismo è possibile adattare senza modifica del progetto gli indirizzi IP ed il nome della stazione. In particolare per le macchine in serie è possibile modificare le impostazioni IP in loco.
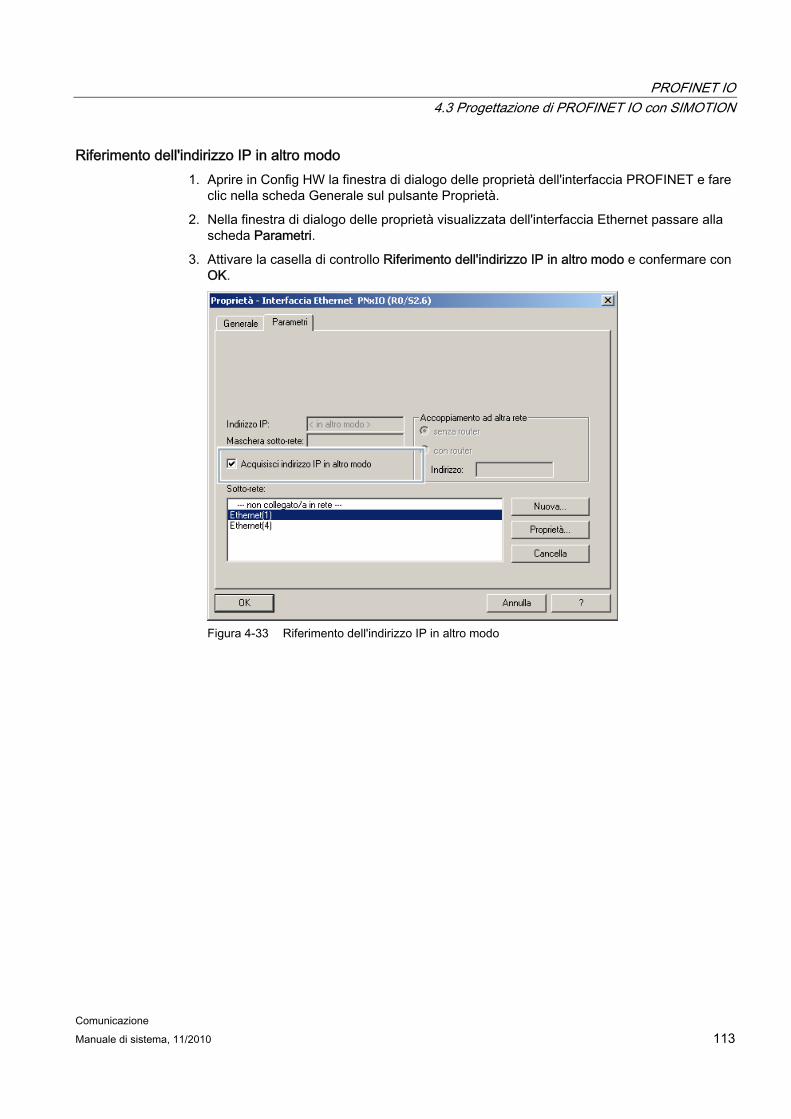
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione Manuale di sistema, 11/2010 113
Riferimento dell'indirizzo IP in altro modo 1. Aprire in Config HW la finestra di dialogo delle proprietà dell'interfaccia PROFINET e fare
clic nella scheda Generale sul pulsante Proprietà.
2. Nella finestra di dialogo delle proprietà visualizzata dell'interfaccia Ethernet passare alla scheda Parametri.
3. Attivare la casella di controllo Riferimento dell'indirizzo IP in altro modo e confermare con OK.
Figura 4-33 Riferimento dell'indirizzo IP in altro modo
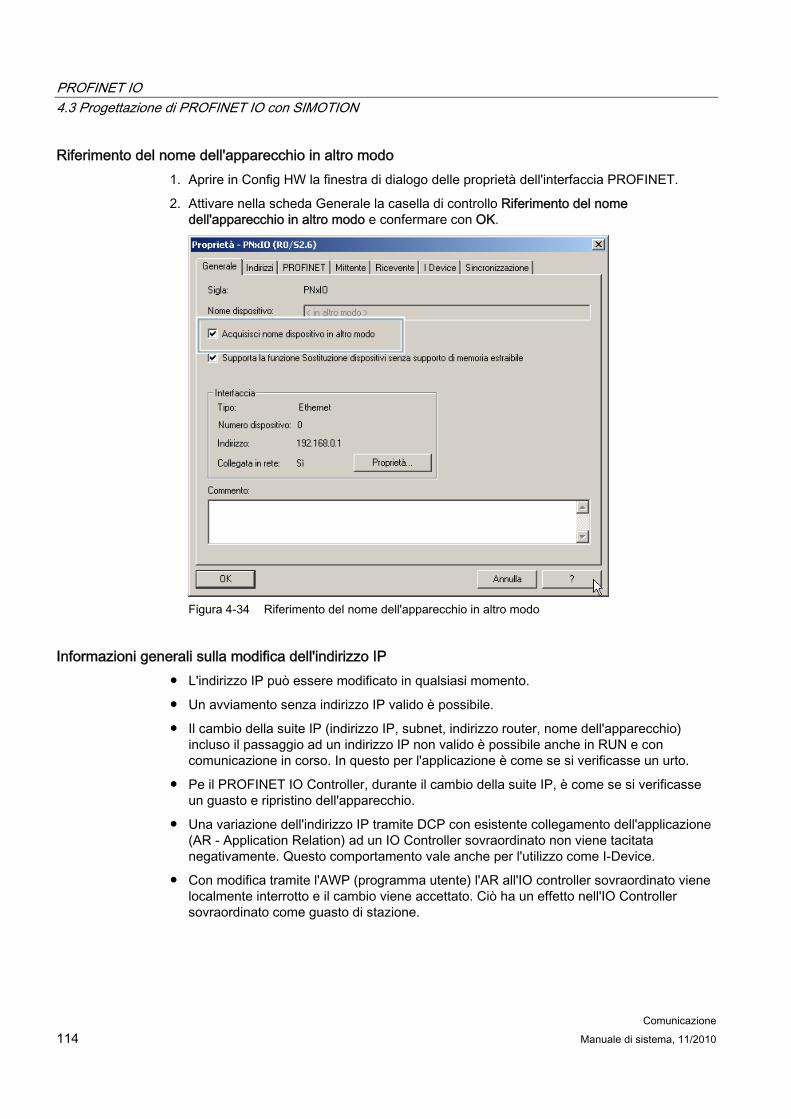
PROFINET IO 4.3 Progettazione di PROFINET IO con SIMOTION
Comunicazione 114 Manuale di sistema, 11/2010
Riferimento del nome dell'apparecchio in altro modo 1. Aprire in Config HW la finestra di dialogo delle proprietà dell'interfaccia PROFINET.
2. Attivare nella scheda Generale la casella di controllo Riferimento del nome dell'apparecchio in altro modo e confermare con OK.
Figura 4-34 Riferimento del nome dell'apparecchio in altro modo
Informazioni generali sulla modifica dell'indirizzo IP ● L'indirizzo IP può essere modificato in qualsiasi momento.
● Un avviamento senza indirizzo IP valido è possibile.
● Il cambio della suite IP (indirizzo IP, subnet, indirizzo router, nome dell'apparecchio) incluso il passaggio ad un indirizzo IP non valido è possibile anche in RUN e con comunicazione in corso. In questo per l'applicazione è come se si verificasse un urto.
● Pe il PROFINET IO Controller, durante il cambio della suite IP, è come se si verificasse un guasto e ripristino dell'apparecchio.
● Una variazione dell'indirizzo IP tramite DCP con esistente collegamento dell'applicazione (AR - Application Relation) ad un IO Controller sovraordinato non viene tacitata negativamente. Questo comportamento vale anche per l'utilizzo come I-Device.
● Con modifica tramite l'AWP (programma utente) l'AR all'IO controller sovraordinato viene localmente interrotto e il cambio viene accettato. Ciò ha un effetto nell'IO Controller sovraordinato come guasto di stazione.
PROFINET IO 4.4 Progettazione dello scambio diretto di dati tra IO-Controller
Comunicazione Manuale di sistema, 11/2010 115
Informazioni generali sulla modifica del nome dell'apparecchio ● Il nome dell'apparecchio può essere modificato in qualsiasi momento.
● Un avviamento senza nome dell'apparecchio valido è possibile.
● Il cambio della suite IP (indirizzo IP, subnet, indirizzo router, nome dell'apparecchio) incluso il passaggio ad un indirizzo IP non valido è possibile anche in RUN e con comunicazione in corso. In questo per l'applicazione è come se si verificasse un urto.
● Il cambio del nome dell'apparecchio incluso il passaggio ad un nome dell'apparecchio "vuoto" è possibile in RUN e con comunicazione in corso. In questo per l'applicazione è come se si verificasse un urto.
● Una modifica del nome dell'apparecchio tramite DCP con esistente collegamento dell'applicazione porta all'interruzione del collegamento dell'applicazione. Questo vale anche per l'utilizzo come I-Device.
● Con un IO Controller, al cambio del nome dell'apparecchio ogni esistente collegamento dell'applicazione all'IO-Device subordinato viene interrotto e ripristinato.
● Il nome dell'apparecchio univoco non viene verificato, una duplicità può essere riconosciuta solo nell'IO Controller sovraordinato o nella Lifelist.
Diagnostica in caso di errore Per la diagnostica in caso di errore viene creata una voce del buffer di diagnostica sulla CPU del SIMOTION I-Device se è stato possibile eseguire un compito DCP per l'impostazione del nome dell'apparecchio o dell'indirizzo IP per l'I-Device perché in Config HW le corrispondenti caselle di controllo non sono attivate.
4.4 Progettazione dello scambio diretto di dati tra IO-Controller
4.4.1 Premessa Tra due o più controller SIMOTION è possibile scambiare ciclicamente aree dati I/O tramite IRT Elevata Performance. Ciò è definito anche come traffico trasversale controller-controller. Il traffico trasversale controller-controller tra controller SIMOTION è possibile solo tramite PROFINET IO con IRT Elevata Performance.
Per lo scambio di dati gli apparecchi devono trovarsi in un dominio Sync comune ed essere configurati come master Sync e slave Sync.
Nota
Per le CPU SIMATIC questa funzione non è disponibile.
PROFINET IO 4.4 Progettazione dello scambio diretto di dati tra IO-Controller
Comunicazione 116 Manuale di sistema, 11/2010
Esistono due tipi di traffico trasversale, quello creato automaticamente dal sistema, ad es. sincronismo distribuito e quello applicativo, cioè utilizzabile dall'utente nella propria applicazione. Questo secondo tipo può essere progettato.
Nota
Il traffico trasversale progettato automaticamente dal sistema non può essere modificato dall'utente nel Tool Engineering (ad es. modifica delle aree indirizzi). Ciò determina infatti la comparsa di errori!
Suggerimento Si consiglia di progettare innanzitutto i campi di trasmissione per tutti gli apparecchi PROFINET, quindi i campi di ricezione. Con questo procedimento per la definizione dei campi di ricezione è possibile assegnare i campi di trasmissione identificati in precedenza. In questo modo si evitano immissioni errate.
Volume di dati Possono essere trasferiti ca. 3 kByte di dati. Per ogni relazione di sincronismo sono necessari 24 Byte. Ciò significa che se per un asse pilota sono stati definiti 5 assi slave, il sistema necessita di 5 * 24 Byte. Il volume di dati residuo è disponibile per il traffico trasversale applicativo.
Nota
Nelle SIMOTION Utilities & Applications è presente una sezione FAQ sull'argomento progettazione PROFINET. Le SIMOTION Utilities & Applications sono in dotazione con SIMOTION SCOUT.
In questa sezione FAQ vengono trattati gli argomenti sincronismo distribuito del cambio e traffico trasversale controller-controller.
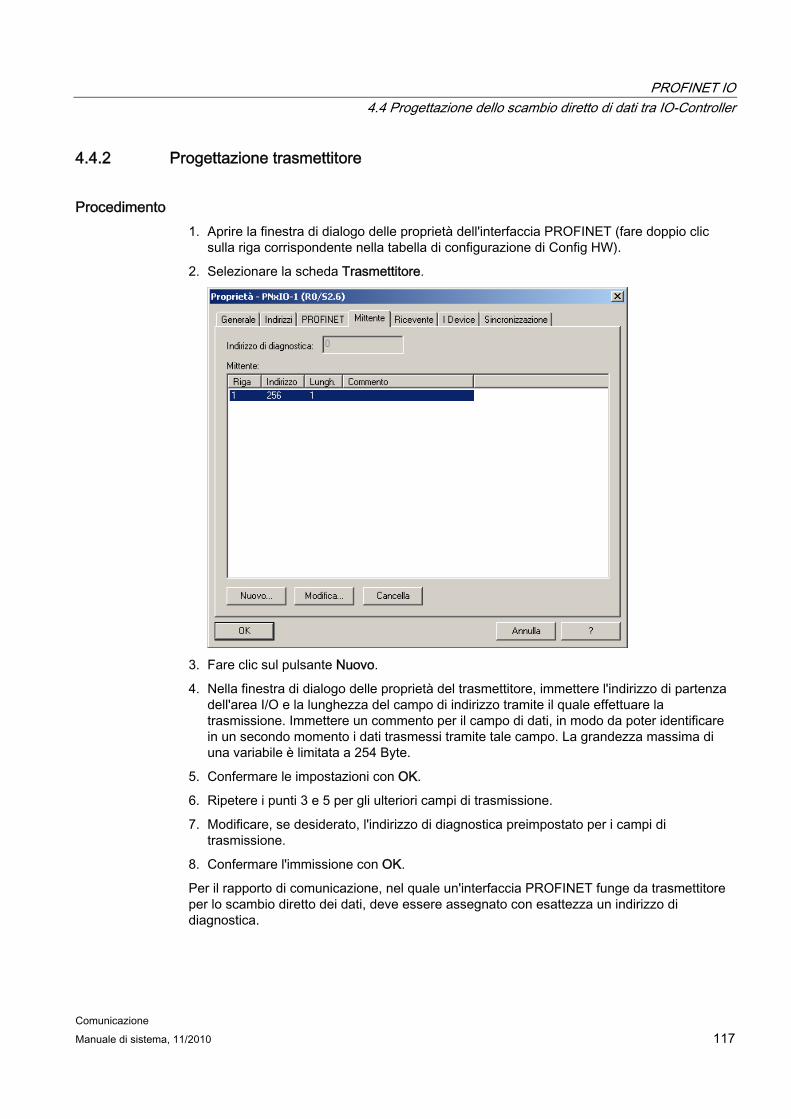
PROFINET IO 4.4 Progettazione dello scambio diretto di dati tra IO-Controller
Comunicazione Manuale di sistema, 11/2010 117
4.4.2 Progettazione trasmettitore
Procedimento 1. Aprire la finestra di dialogo delle proprietà dell'interfaccia PROFINET (fare doppio clic
sulla riga corrispondente nella tabella di configurazione di Config HW).
2. Selezionare la scheda Trasmettitore.
3. Fare clic sul pulsante Nuovo.
4. Nella finestra di dialogo delle proprietà del trasmettitore, immettere l'indirizzo di partenza dell'area I/O e la lunghezza del campo di indirizzo tramite il quale effettuare la trasmissione. Immettere un commento per il campo di dati, in modo da poter identificare in un secondo momento i dati trasmessi tramite tale campo. La grandezza massima di una variabile è limitata a 254 Byte.
5. Confermare le impostazioni con OK.
6. Ripetere i punti 3 e 5 per gli ulteriori campi di trasmissione.
7. Modificare, se desiderato, l'indirizzo di diagnostica preimpostato per i campi di trasmissione.
8. Confermare l'immissione con OK.
Per il rapporto di comunicazione, nel quale un'interfaccia PROFINET funge da trasmettitore per lo scambio diretto dei dati, deve essere assegnato con esattezza un indirizzo di diagnostica.
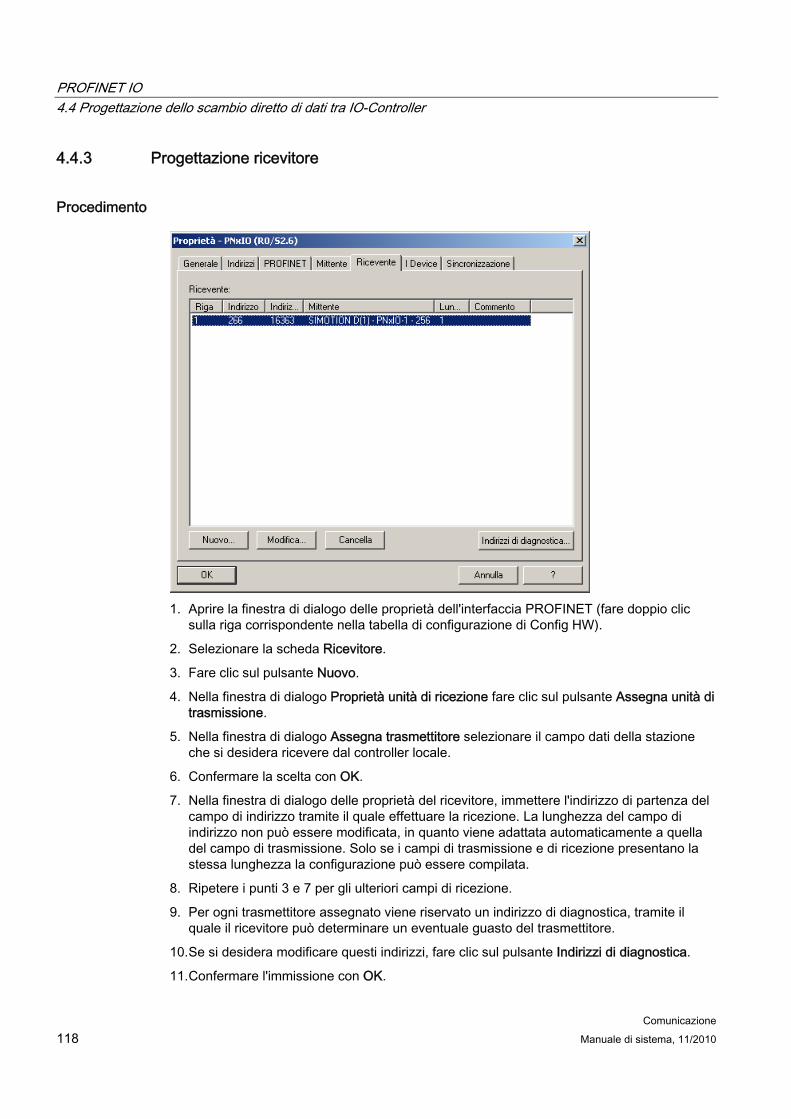
PROFINET IO 4.4 Progettazione dello scambio diretto di dati tra IO-Controller
Comunicazione 118 Manuale di sistema, 11/2010
4.4.3 Progettazione ricevitore
Procedimento
1. Aprire la finestra di dialogo delle proprietà dell'interfaccia PROFINET (fare doppio clic
sulla riga corrispondente nella tabella di configurazione di Config HW).
2. Selezionare la scheda Ricevitore.
3. Fare clic sul pulsante Nuovo.
4. Nella finestra di dialogo Proprietà unità di ricezione fare clic sul pulsante Assegna unità di trasmissione.
5. Nella finestra di dialogo Assegna trasmettitore selezionare il campo dati della stazione che si desidera ricevere dal controller locale.
6. Confermare la scelta con OK.
7. Nella finestra di dialogo delle proprietà del ricevitore, immettere l'indirizzo di partenza del campo di indirizzo tramite il quale effettuare la ricezione. La lunghezza del campo di indirizzo non può essere modificata, in quanto viene adattata automaticamente a quella del campo di trasmissione. Solo se i campi di trasmissione e di ricezione presentano la stessa lunghezza la configurazione può essere compilata.
8. Ripetere i punti 3 e 7 per gli ulteriori campi di ricezione.
9. Per ogni trasmettitore assegnato viene riservato un indirizzo di diagnostica, tramite il quale il ricevitore può determinare un eventuale guasto del trasmettitore.
10. Se si desidera modificare questi indirizzi, fare clic sul pulsante Indirizzi di diagnostica.
11. Confermare l'immissione con OK.
PROFINET IO 4.5 Progettazione degli I-Device
Comunicazione Manuale di sistema, 11/2010 119
4.5 Progettazione degli I-Device
4.5.1 PROFINET IO e I-Device
Introduzione L'accoppiamento diretto, ad es. di SIMATIC e SIMOTION tramite PROFINET, fino a SIMOTION 4.0 era possibile solo tramite TCP o UDP oppure hardware aggiuntivo (PN/PN Coupler, SIMATIC-CP). Da SIMOTION V 4.1.1.6 è stato realizzato per PROFINET IO il noto accoppiamento diretto di controlli da PROFIBUS. Tramite PROFIBUS è possibile ad es. collegare SIMOTION come I-Slave alla CPU SIMATIC. Questa funzione è paragonabile a quella disponibile in PROFINET IO, con il nome I-Device. In questo modo è possibile lo scambio di dati tra i controlli tramite l'area ingresso/uscita. La programmazione della comunicazione necessaria per TCP o UDP viene così sostituita da progettazione e funzionalità di sistema. Inoltre scompaiono i costi per le soluzioni hardware impiegate sinora (PN/PN Coupler, SIMATIC-CP).
Un I-Device è un controller che svolge anche la funzione di un IO-Device. Il concetto I-Device sta per IO-Device intelligente. Caratteristica di questo I-Device intelligente è che i suoi dati di ingresso/uscita non vengono messi a disposizione dell'IO-Controller direttamente da ingressi/uscite sovraordinati, ma sottoposti a pre-elaborazione nell'-I-Device.
Un apparecchio SIMOTION come I-Device può essere impiegato ad es. per lo scambio di dati con una stazione SIMATIC. Inoltre un apparecchio SIMOTION può essere impiegato come I-Device ad esempio anche per la creazione di una macchina modulare. A questo proposito vedere Descrizione delle funzioni SIMOTION Motion Control - Funzioni di base per macchine modulari. Infine, un apparecchio SIMOTION può essere impiegato come I-Device anche per un sincronismo distribuito sui limiti del progetto; a tale scopo vedere Manuale di guida alle funzioni Motion Control - Oggetti tecnologici sincronismo, disco a camma curvilineo
Nota
Un I-Device può essere creato solo a partire da SIMOTION V4.1.1.6.
Caratteristiche di un I-Device Un I-Device oltre al ruolo di IO-Device in un IO-Controller sovraordinato può anche bloccare un proprio sistema PROFINET IO locale con propri IO-Device locali e fungere così esso stesso da IO-Controller. Entrambe le funzioni vengono realizzate tramite la stessa interfaccia PROFINET dell'apparecchio.
L'I-Device in SIMOTION è disponibile per PROFINET IO con RT e con IRT Elevata prestazione.
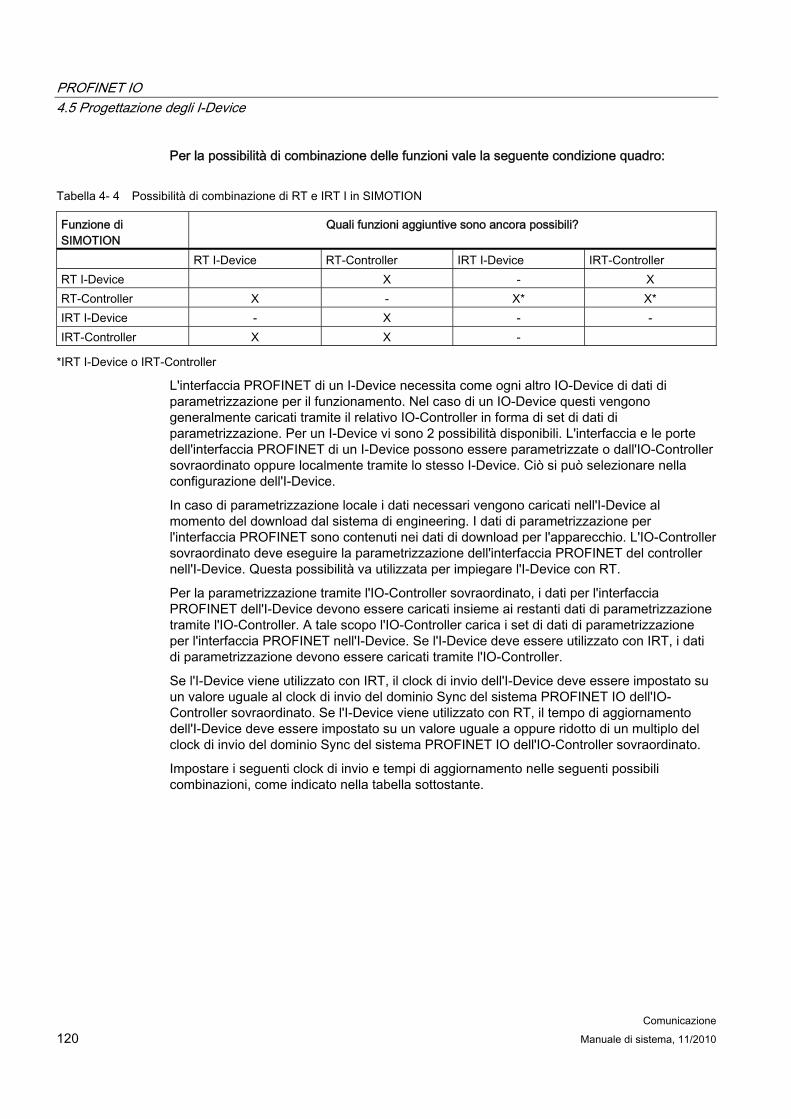
PROFINET IO 4.5 Progettazione degli I-Device
Comunicazione 120 Manuale di sistema, 11/2010
Per la possibilità di combinazione delle funzioni vale la seguente condizione quadro:
Tabella 4- 4 Possibilità di combinazione di RT e IRT I in SIMOTION
Funzione di SIMOTION
Quali funzioni aggiuntive sono ancora possibili?
RT I-Device RT-Controller IRT I-Device IRT-Controller RT I-Device X - X RT-Controller X - X* X* IRT I-Device - X - - IRT-Controller X X -
*IRT I-Device o IRT-Controller
L'interfaccia PROFINET di un I-Device necessita come ogni altro IO-Device di dati di parametrizzazione per il funzionamento. Nel caso di un IO-Device questi vengono generalmente caricati tramite il relativo IO-Controller in forma di set di dati di parametrizzazione. Per un I-Device vi sono 2 possibilità disponibili. L'interfaccia e le porte dell'interfaccia PROFINET di un I-Device possono essere parametrizzate o dall'IO-Controller sovraordinato oppure localmente tramite lo stesso I-Device. Ciò si può selezionare nella configurazione dell'I-Device.
In caso di parametrizzazione locale i dati necessari vengono caricati nell'I-Device al momento del download dal sistema di engineering. I dati di parametrizzazione per l'interfaccia PROFINET sono contenuti nei dati di download per l'apparecchio. L'IO-Controller sovraordinato deve eseguire la parametrizzazione dell'interfaccia PROFINET del controller nell'I-Device. Questa possibilità va utilizzata per impiegare l'I-Device con RT.
Per la parametrizzazione tramite l'IO-Controller sovraordinato, i dati per l'interfaccia PROFINET dell'I-Device devono essere caricati insieme ai restanti dati di parametrizzazione tramite l'IO-Controller. A tale scopo l'IO-Controller carica i set di dati di parametrizzazione per l'interfaccia PROFINET nell'I-Device. Se l'I-Device deve essere utilizzato con IRT, i dati di parametrizzazione devono essere caricati tramite l'IO-Controller.
Se l'I-Device viene utilizzato con IRT, il clock di invio dell'I-Device deve essere impostato su un valore uguale al clock di invio del dominio Sync del sistema PROFINET IO dell'IO-Controller sovraordinato. Se l'I-Device viene utilizzato con RT, il tempo di aggiornamento dell'I-Device deve essere impostato su un valore uguale a oppure ridotto di un multiplo del clock di invio del dominio Sync del sistema PROFINET IO dell'IO-Controller sovraordinato.
Impostare i seguenti clock di invio e tempi di aggiornamento nelle seguenti possibili combinazioni, come indicato nella tabella sottostante.
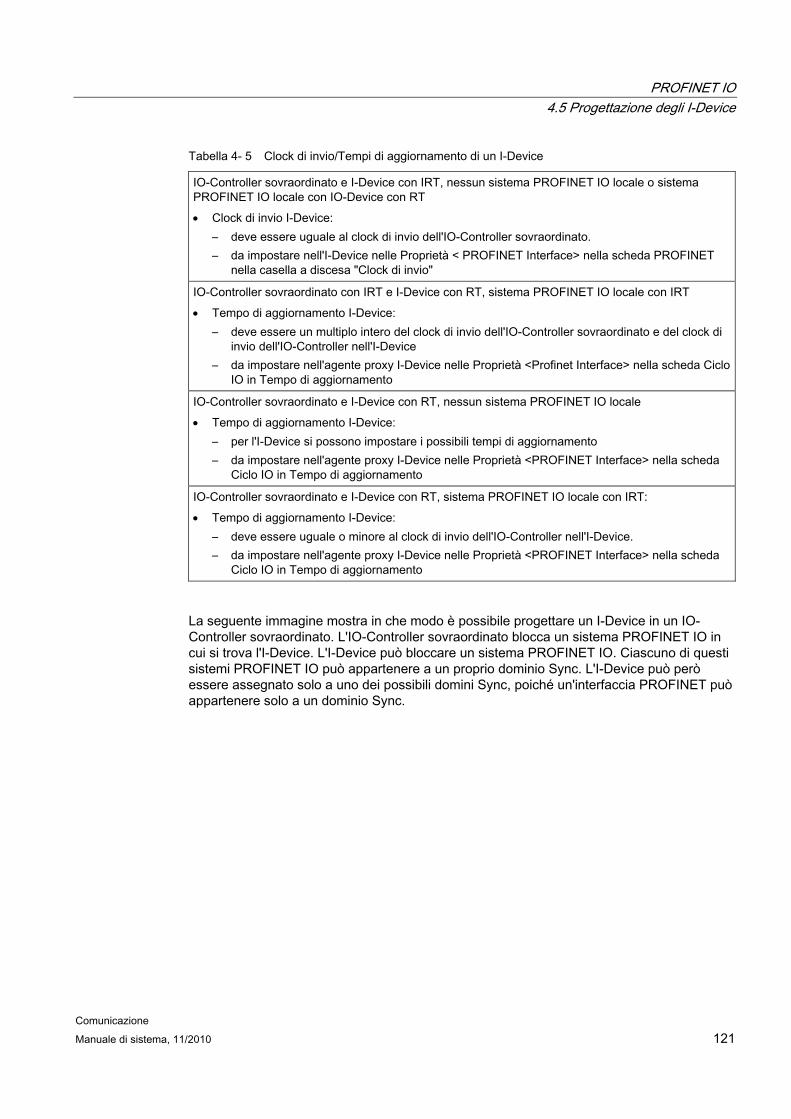
PROFINET IO 4.5 Progettazione degli I-Device
Comunicazione Manuale di sistema, 11/2010 121
Tabella 4- 5 Clock di invio/Tempi di aggiornamento di un I-Device
IO-Controller sovraordinato e I-Device con IRT, nessun sistema PROFINET IO locale o sistema PROFINET IO locale con IO-Device con RT Clock di invio I-Device:
– deve essere uguale al clock di invio dell'IO-Controller sovraordinato. – da impostare nell'I-Device nelle Proprietà < PROFINET Interface> nella scheda PROFINET
nella casella a discesa "Clock di invio"
IO-Controller sovraordinato con IRT e I-Device con RT, sistema PROFINET IO locale con IRT Tempo di aggiornamento I-Device:
– deve essere un multiplo intero del clock di invio dell'IO-Controller sovraordinato e del clock di invio dell'IO-Controller nell'I-Device
– da impostare nell'agente proxy I-Device nelle Proprietà <Profinet Interface> nella scheda Ciclo IO in Tempo di aggiornamento
IO-Controller sovraordinato e I-Device con RT, nessun sistema PROFINET IO locale Tempo di aggiornamento I-Device:
– per l'I-Device si possono impostare i possibili tempi di aggiornamento – da impostare nell'agente proxy I-Device nelle Proprietà <PROFINET Interface> nella scheda
Ciclo IO in Tempo di aggiornamento
IO-Controller sovraordinato e I-Device con RT, sistema PROFINET IO locale con IRT: Tempo di aggiornamento I-Device:
– deve essere uguale o minore al clock di invio dell'IO-Controller nell'I-Device. – da impostare nell'agente proxy I-Device nelle Proprietà <PROFINET Interface> nella scheda
Ciclo IO in Tempo di aggiornamento
La seguente immagine mostra in che modo è possibile progettare un I-Device in un IO-Controller sovraordinato. L'IO-Controller sovraordinato blocca un sistema PROFINET IO in cui si trova l'I-Device. L'I-Device può bloccare un sistema PROFINET IO. Ciascuno di questi sistemi PROFINET IO può appartenere a un proprio dominio Sync. L'I-Device può però essere assegnato solo a uno dei possibili domini Sync, poiché un'interfaccia PROFINET può appartenere solo a un dominio Sync.
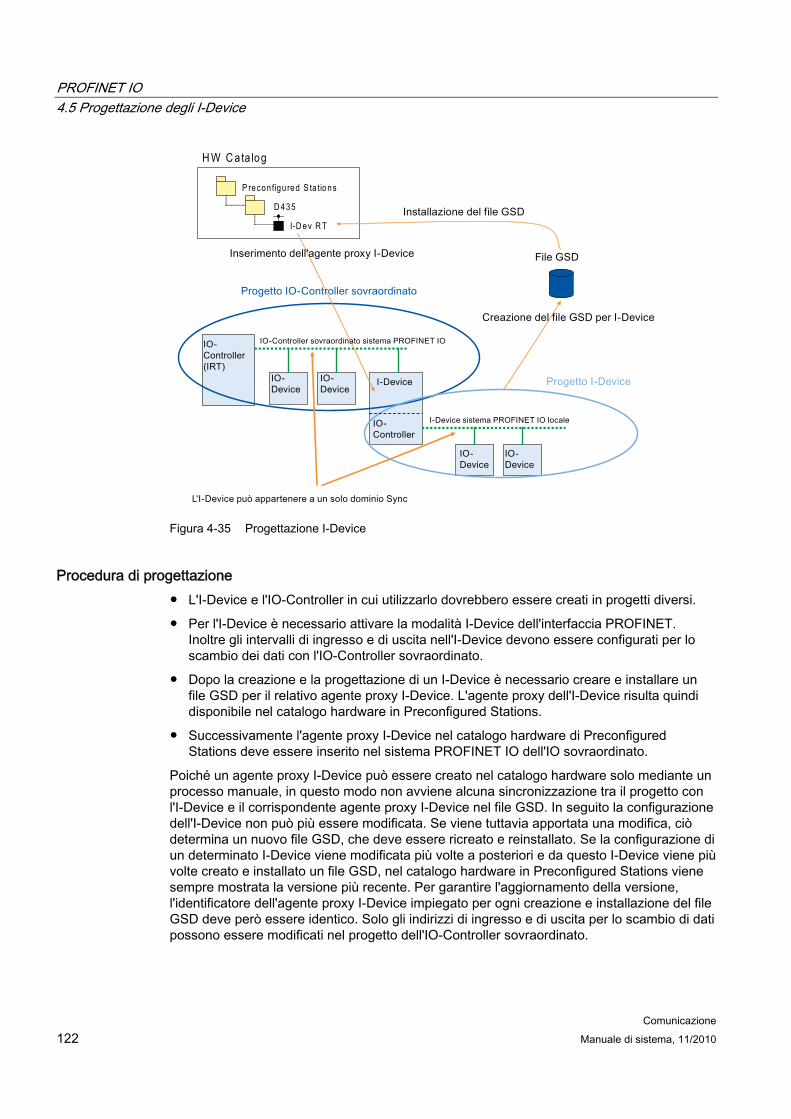
PROFINET IO 4.5 Progettazione degli I-Device
Comunicazione 122 Manuale di sistema, 11/2010
P recon figu red S ta tions
D 435
I-D ev R T
H W C ata log
Figura 4-35 Progettazione I-Device
Procedura di progettazione ● L'I-Device e l'IO-Controller in cui utilizzarlo dovrebbero essere creati in progetti diversi.
● Per l'I-Device è necessario attivare la modalità I-Device dell'interfaccia PROFINET. Inoltre gli intervalli di ingresso e di uscita nell'I-Device devono essere configurati per lo scambio dei dati con l'IO-Controller sovraordinato.
● Dopo la creazione e la progettazione di un I-Device è necessario creare e installare un file GSD per il relativo agente proxy I-Device. L'agente proxy dell'I-Device risulta quindi disponibile nel catalogo hardware in Preconfigured Stations.
● Successivamente l'agente proxy I-Device nel catalogo hardware di Preconfigured Stations deve essere inserito nel sistema PROFINET IO dell'IO sovraordinato.
Poiché un agente proxy I-Device può essere creato nel catalogo hardware solo mediante un processo manuale, in questo modo non avviene alcuna sincronizzazione tra il progetto con l'I-Device e il corrispondente agente proxy I-Device nel file GSD. In seguito la configurazione dell'I-Device non può più essere modificata. Se viene tuttavia apportata una modifica, ciò determina un nuovo file GSD, che deve essere ricreato e reinstallato. Se la configurazione di un determinato I-Device viene modificata più volte a posteriori e da questo I-Device viene più volte creato e installato un file GSD, nel catalogo hardware in Preconfigured Stations viene sempre mostrata la versione più recente. Per garantire l'aggiornamento della versione, l'identificatore dell'agente proxy I-Device impiegato per ogni creazione e installazione del file GSD deve però essere identico. Solo gli indirizzi di ingresso e di uscita per lo scambio di dati possono essere modificati nel progetto dell'IO-Controller sovraordinato.
PROFINET IO 4.5 Progettazione degli I-Device
Comunicazione Manuale di sistema, 11/2010 123
Poiché gli I-Device nei relativi IO-Controller sovraordinati e gli IO-Device collegati al sistema PROFINET IO di un singolo I-Device vengono collegati tramite la stessa interfaccia PROFINET, anche tutti gli apparecchi menzionati si trovano in un'unica sottorete Ethernet. Ne consegue che i nomi apparecchio e gli indirizzi IP di tutti questi apparecchi devono essere diversi tra loro e le maschere di sottorete identiche. Questo aspetto è particolarmente importante se l'IO-Controller sovraordinato e l'I-Device si trovano in progetti diversi. Config HW non è infatti in grado di verificare la coerenza di nomi apparecchio, indirizzi IP e maschere di sottorete tra progetti diversi.
Nome apparecchio (NameOfStation) per I-Device Come per tutti gli IO-Device in PROFINET IO anche per un I-Device è necessario stabilire un nome apparecchio nella progettazione. Il nome apparecchio (NameOfStation) per l'I-Device viene impostato nelle Proprietà della relativa interfaccia PROFINET ed è quindi identico al nome apparecchio dell'IO-Controller nell'I-Device. Questo nome impostato viene scritto nel file GSD al momento della creazione e dell'installazione del file stesso per l'agente proxy. Durante l'inserimento dell'agente proxy I-Device nel sistema PROFINET IO dell'IO-Controller sovraordinato, il nome apparecchio assegnato nel file GSD viene trasferito nella configurazione. In ogni caso occorre garantire che il nome apparecchio nella configurazione dell'IO-Controller sovraordinato sia identico al nome apparecchio stabilito per l'I-Device. Successivamente dopo l'inserimento nel sistema PROFINET IO dell' IO-Controller sovraordinato il nome apparecchio non può più essere modificato.
Se i nomi apparecchio sono diversi, l'IO-Controller sovraordinato non riesce ad avviare l'I-Device interessato e quindi ad avviare lo scambio ciclico dei dati di ingresso/uscita.
I casi seguenti possono dare origine a nomi apparecchio diversi e devono essere quindi evitati:
● Quando si utilizza come IO-Controller sovraordinato un apparecchio SIMOTION, il nome dell'apparecchio dell'I-Device (NameOfStation) non deve contenere il segno "-". Questo segno viene trasformato in "x" quando l'i-Device viene inserito nel sistema PROFINET IO.
● Poiché uno stesso nome apparecchio non può comparire due volte all'interno di una sottorete Ethernet, in caso di inserimento di un agente proxy I-Device nel sistema PROFINET IO del relativo IO-Controller sovraordinato, il nome apparecchio viene modificato (se ancora presente). Per questo motivo occorre fare attenzione a non utilizzare nel file GSD nomi apparecchio già assegnati.
● Se più agenti proxy I-Device provenienti dalla stessa voce di Preconfigured Stations vengono inseriti nel sistema PROFINET IO dell'IO-Controller sovraordinato, i nomi apparecchio preassegnati nel file GSD vengono modificati. Pertanto per ogni I-Device da impiegare in un sistema PROFINET IO è necessario creare anche un agente proxy I-Device specifico.
Vedere anche Creazione I-Device (Pagina 126)
PROFINET IO 4.5 Progettazione degli I-Device
Comunicazione 124 Manuale di sistema, 11/2010
4.5.2 Funzionalità I-Device a partire da SIMOTION SCOUT V4.2
Descrizione A partire da Step 7 5.5 è possibile progettare anche le CPU SIMATIC come I-Device. La funzionalità I-Device delle CPU SIMOTION e delle CPU SIMATIC è stata unificata in modo omogeneo. Nel quadro dell'unificazione la versione GSD è stata portata a V2.25. Con progetti SIMOTION < V4.2 l'I-Device, nell'upgrade alla versione V4.2, deve pertanto essere nuovamente esportato/installato ed integrato nel progetto del nuovo controller sovraordinato. Se si elaborano i progetti senza aver esportato ed installato nuovamente il file GSD, alla realizzazione del collegamento tramite PROFINET viene creata una voce del buffer di diagnostica sulla CPU dell'I-Device.
Nota Condizioni generali dell'I-Device a partire da V4.2
Per la progettazione sul controller sovraordinato occorre utilizzare Step 7 V5.5, poiché soltanto da questa versione è possibile importare il GSD V2.25.
All'upgrade di versioni precedenti alla CPU SIMOTION a V4.2 l'I-Device diventa "incompatibile" e occorre comunque eseguire un'esportazione/importazione del GSD.
Di seguito vengono descritti diversi scenari per una compatibilità dell'I-Device.
UseCase 1: vecchio progetto con apparecchi SIMOTION < V4.2 senza modifica su I-Device. 1. Aprire un vecchio progetto con SCOUT V4.2/Step 7 5.5. Nel progetto sono contenuti RT
I-Device per la comunicazione ad una CPU SIMATIC.
2. Modificare il progetto, ma non eseguire alcuna modifica alla configurazione dell'I-Device.
3. Compilare il progetto SIMOTION incluso Config HW e salvarlo come SIMOTION SCOUT V4.1.
4. Il progetto può essere nuovamente caricato senza problemi.
UseCase 2: vecchio progetto con apparecchi SIMOTION < V4.2 con modifica su interfaccia I-Device. 1. Aprire un vecchio progetto con SCOUT V4.2/Step 7 5.5. Nel progetto sono contenuti RT
I-Device per la comunicazione ad una CPU SIMATIC.
2. Modificare il progetto ed effettuare modifiche alla configurazione I-Device. Le modifiche vengono eseguite automaticamente sull'interfaccia I-Device e si aggiunge uno slot IO.
3. Creare un nuovo GSD V2.25 dell'I-Device.
4. Installare l'I-Device esportato e sostituirlo nella CPU SIMATIC sovraordinata.
Nota
Se si utilizza un nuovo GSD in un altro progetto, è possibile elaborarlo soltanto con STEP 7 V5.5 poiché la compatibilità sarebbe assicurata solo con GSD V2.25.
PROFINET IO 4.5 Progettazione degli I-Device
Comunicazione Manuale di sistema, 11/2010 125
5. Compilare il progetto SIMOTION incluso Config HW e salvarlo come SIMOTION SCOUT V4.1.
6. Il progetto può essere nuovamente caricato senza problemi.
UseCase 3: CPU SIMATIC sovraordinata e SIMOTION I-Device < V4.2 e upgrade a V4.2. 1. Aprire il progetto con una CPU SIMOTION e una CPU SIMATIC sovraordinata. La CPU
SIMATIC comunica come PN-Controller con l'I-Device della CPU SIMOTION.
2. Aggiornare la CPU SIMOTION a SIMOTION V4.2.
3. Esportare l'I-Device della CPU SIMOTION.
4. Gli indirizzi di diagnostica ed i numeri di stazione sono state modificati rispetto al precedente I-Device. Se questi vengono utilizzati come valori assoluti nell'applicazione SIMOTION nei richiami si sistema, è necessario adattare il programma di applicazione.
5. Cancellare l'I-Device precedente della CPU SIMOTION nel progetto della CPU SIMATIC sovraordinata. Assicurarsi che gli indirizzi di input ed output del nuovo I-Device siano identici a quelli vecchi, in modo che possa essere utilizzata l'applicazione S7 utilizzata fino ad ora.
6. Importare il nuovo file GSD nel progetto della CPU SIMATIC sovraordinata.
7. Compilare il progetto SIMOTION incluso Config HW e salvarlo come SIMOTION SCOUT V4.2. Il progetto è aggiornato a V4.2.
UseCase 4: CPU SIMOTION sovraordinata e più SIMOTION I-Device < V4.2 e upgrade a V4.2. 1. Aprire il progetto con più CPU SIMOTION come I-Device e una CPU SIMOTION
sovraordinata. La CPU SIMOTION sovraordinata comunica come PN-Controller con l'I-Device della CPU SIMOTION.
2. Aggiornare le CPU SIMOTION a SIMOTION V4.2.
3. Gli indirizzi di diagnostica ed i numeri di stazione sono state modificati rispetto al precedente I-Device. Se questi vengono utilizzati come valori assoluti nell'applicazione SIMOTION nei richiami si sistema, è necessario adattare il programma di applicazione.
4. Esportare l'I-Device delle CPU SIMOTION ed importare il file GSD nel progetto della CPU SIMOTION sovraordinata.
5. Compilare il progetto SIMOTION incluso Config HW e salvarlo come SIMOTION SCOUT V4.2. Il progetto è aggiornato a V4.2.
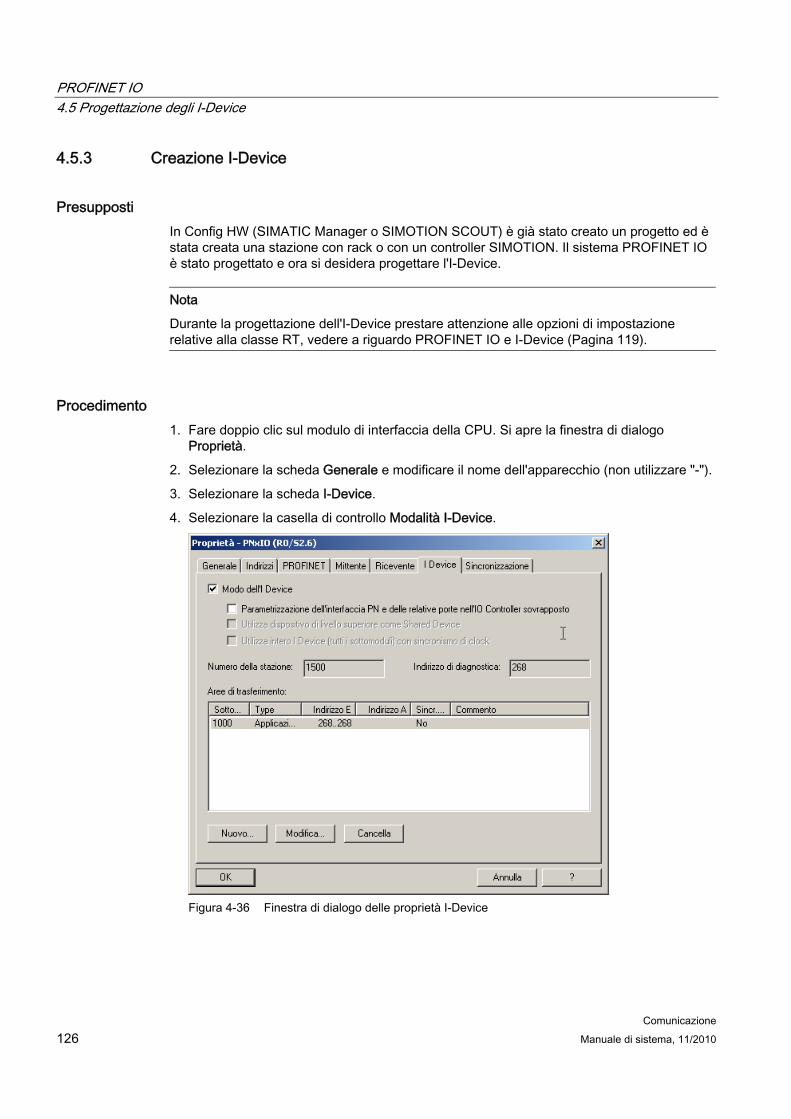
PROFINET IO 4.5 Progettazione degli I-Device
Comunicazione 126 Manuale di sistema, 11/2010
4.5.3 Creazione I-Device
Presupposti In Config HW (SIMATIC Manager o SIMOTION SCOUT) è già stato creato un progetto ed è stata creata una stazione con rack o con un controller SIMOTION. Il sistema PROFINET IO è stato progettato e ora si desidera progettare l'I-Device.
Nota
Durante la progettazione dell'I-Device prestare attenzione alle opzioni di impostazione relative alla classe RT, vedere a riguardo PROFINET IO e I-Device (Pagina 119).
Procedimento 1. Fare doppio clic sul modulo di interfaccia della CPU. Si apre la finestra di dialogo
Proprietà.
2. Selezionare la scheda Generale e modificare il nome dell'apparecchio (non utilizzare "-").
3. Selezionare la scheda I-Device.
4. Selezionare la casella di controllo Modalità I-Device.
Figura 4-36 Finestra di dialogo delle proprietà I-Device
PROFINET IO 4.5 Progettazione degli I-Device
Comunicazione Manuale di sistema, 11/2010 127
5. In dipendenza di ciò, se la comunicazione dell'I-Device deve avvenire come RT o IRT sul controller sovraordinato, occorre attivare diverse caselle di controllo.
– I-Device come RT: Attivare solo la casella di controllo Modalità I-Device.
– I-Device come IRT: Se l'I-Device deve essere comandato come IRT sull'IO-Controller sovraordinato, occorre attivare in aggiunta le caselle di controllo Parametrizzazione dell'interfaccia PN e delle sue porte sull'IO-Controller sovraordinato e Esegui I-Device (tutti i sottomoduli) a sincronismo di clock. In questo modo vengono create anche le porte nel file GSD e all'avvio i set di dati di parametrizzazione vengono caricati nel controller dell'I-Device. Se questa opzione non viene selezionata, la comunicazione ciclica fra l'IO-Controller sovraordinato e l'I-Device può avvenire solo tramite RT. Nell'agente proxy I-Device viene così visualizzata nella finestra di dialogo Proprietà dell'interfaccia PROFINET la scheda Ciclo IO, nella quale è possibile selezionare in Assegnazione sincrona al clock dell'IO-Device la voce Servo per poter utilizzare l'I-Device con sincronismo di clock. Se un I-Device deve essere utilizzato con IRT, è necessario impostare sia la parametrizzazione dell'interfaccia PN e delle relative porte nell'IO-Controller sovraordinato, sia Assegnazione sincrona al clock dell'IO-Device.
Nota
Osservare, quando l'I-Device deve operare in funzionamento IRT, se il nome dell'apparecchio e l'indirizzo IP devono essere assegnati dal controller. Inoltre occorre impostare sull'I-Device questa opzione. Osservare inoltre il capitolo Indirizzo IP e nomi di comunicazione per AWP/DCP (Mini-IP-Config) (Pagina 112) e Inserimento dell'agente proxy I-Device nell'IO-Controller sovraordinato (Pagina 131).
6. Se l'I-Device deve essere utilizzato con IRT, è necessario impostare il relativo clock di invio. Selezionare la scheda PROFINET e impostare un clock di invio corrispondente.
7. Fare clic su Nuovo... ogni volta che si desidera creare subslot virtuali (Area di trasferimento indirizzo di ingresso e uscita) e configurarli in base alle esigenze. In questo modo si configura l'area E/A dell'I-Device, tramite la quale vengono scambiati i dati con l'IO-Controller sovraordinato. Nelle schede Mittente e Destinatario non è più necessario eseguire alcuna impostazione.
8. Fare clic su OK per applicare le impostazioni e memorizzare il progetto.
9. Proseguire con la creazione dell'agente proxy I-Device.
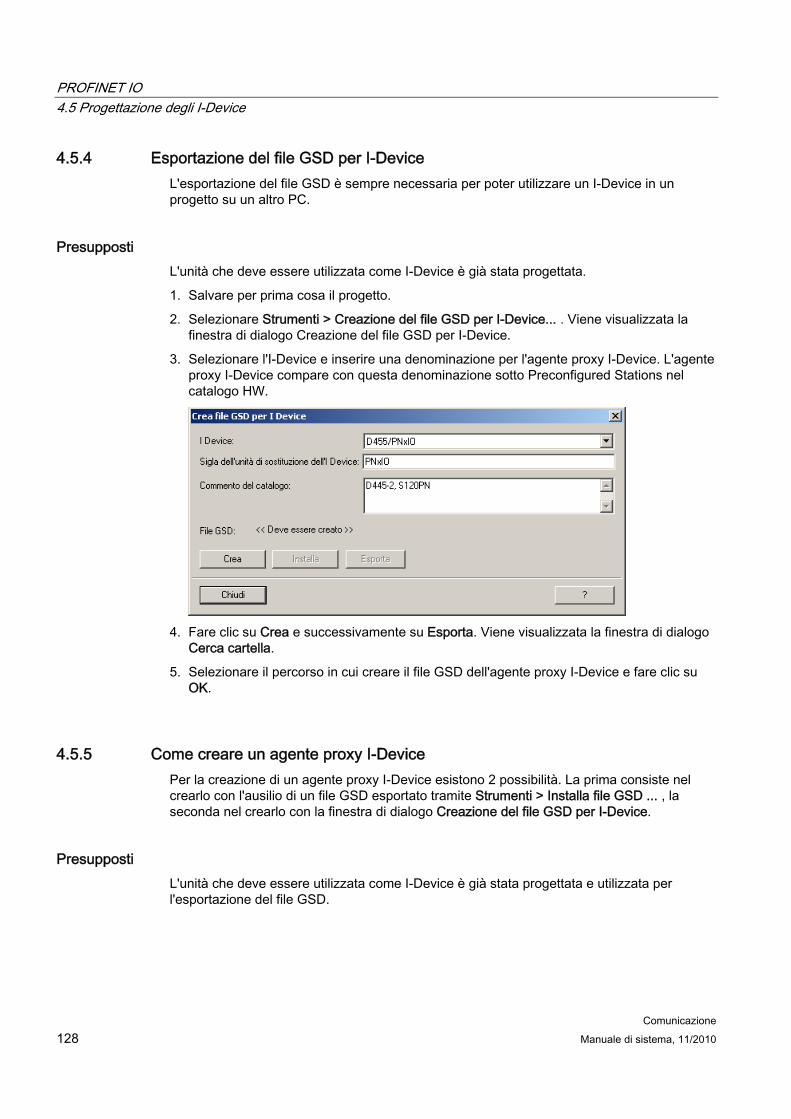
PROFINET IO 4.5 Progettazione degli I-Device
Comunicazione 128 Manuale di sistema, 11/2010
4.5.4 Esportazione del file GSD per I-Device L'esportazione del file GSD è sempre necessaria per poter utilizzare un I-Device in un progetto su un altro PC.
Presupposti L'unità che deve essere utilizzata come I-Device è già stata progettata.
1. Salvare per prima cosa il progetto.
2. Selezionare Strumenti > Creazione del file GSD per I-Device... . Viene visualizzata la finestra di dialogo Creazione del file GSD per I-Device.
3. Selezionare l'I-Device e inserire una denominazione per l'agente proxy I-Device. L'agente proxy I-Device compare con questa denominazione sotto Preconfigured Stations nel catalogo HW.
4. Fare clic su Crea e successivamente su Esporta. Viene visualizzata la finestra di dialogo
Cerca cartella.
5. Selezionare il percorso in cui creare il file GSD dell'agente proxy I-Device e fare clic su OK.
4.5.5 Come creare un agente proxy I-Device Per la creazione di un agente proxy I-Device esistono 2 possibilità. La prima consiste nel crearlo con l'ausilio di un file GSD esportato tramite Strumenti > Installa file GSD ... , la seconda nel crearlo con la finestra di dialogo Creazione del file GSD per I-Device.
Presupposti L'unità che deve essere utilizzata come I-Device è già stata progettata e utilizzata per l'esportazione del file GSD.
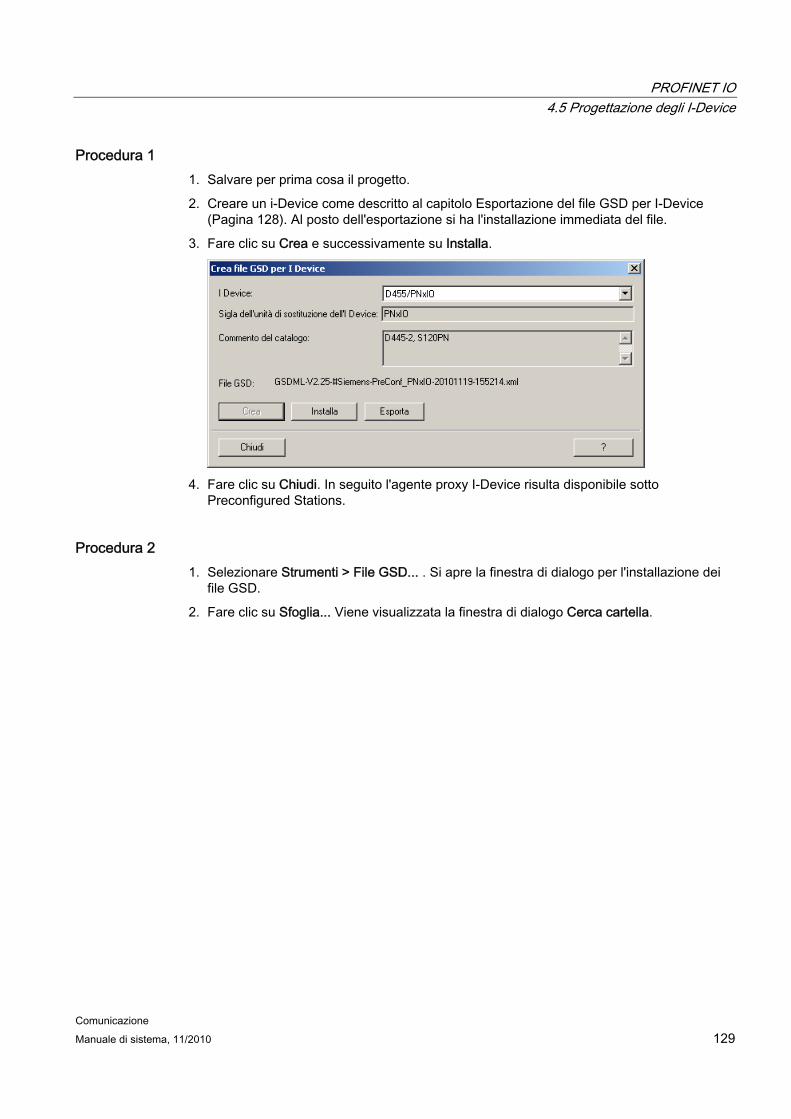
PROFINET IO 4.5 Progettazione degli I-Device
Comunicazione Manuale di sistema, 11/2010 129
Procedura 1 1. Salvare per prima cosa il progetto.
2. Creare un i-Device come descritto al capitolo Esportazione del file GSD per I-Device (Pagina 128). Al posto dell'esportazione si ha l'installazione immediata del file.
3. Fare clic su Crea e successivamente su Installa.
4. Fare clic su Chiudi. In seguito l'agente proxy I-Device risulta disponibile sotto
Preconfigured Stations.
Procedura 2 1. Selezionare Strumenti > File GSD... . Si apre la finestra di dialogo per l'installazione dei
file GSD.
2. Fare clic su Sfoglia... Viene visualizzata la finestra di dialogo Cerca cartella.
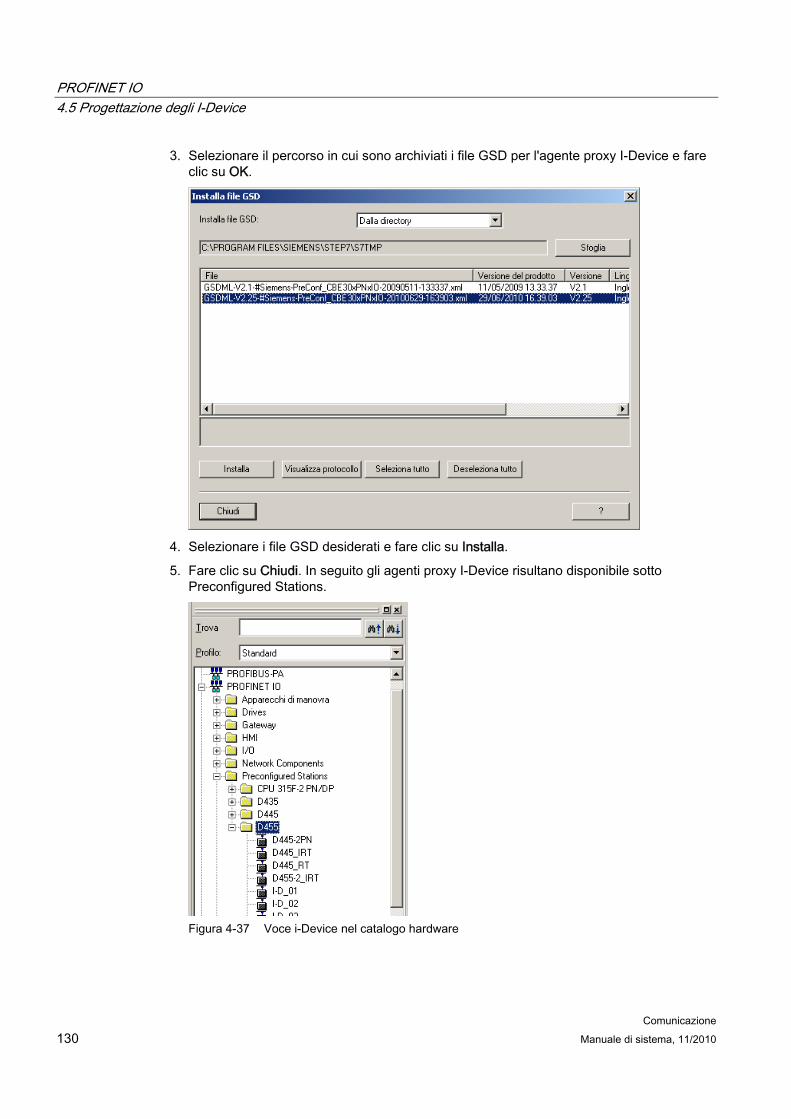
PROFINET IO 4.5 Progettazione degli I-Device
Comunicazione 130 Manuale di sistema, 11/2010
3. Selezionare il percorso in cui sono archiviati i file GSD per l'agente proxy I-Device e fare clic su OK.
4. Selezionare i file GSD desiderati e fare clic su Installa.
5. Fare clic su Chiudi. In seguito gli agenti proxy I-Device risultano disponibile sotto Preconfigured Stations.
Figura 4-37 Voce i-Device nel catalogo hardware
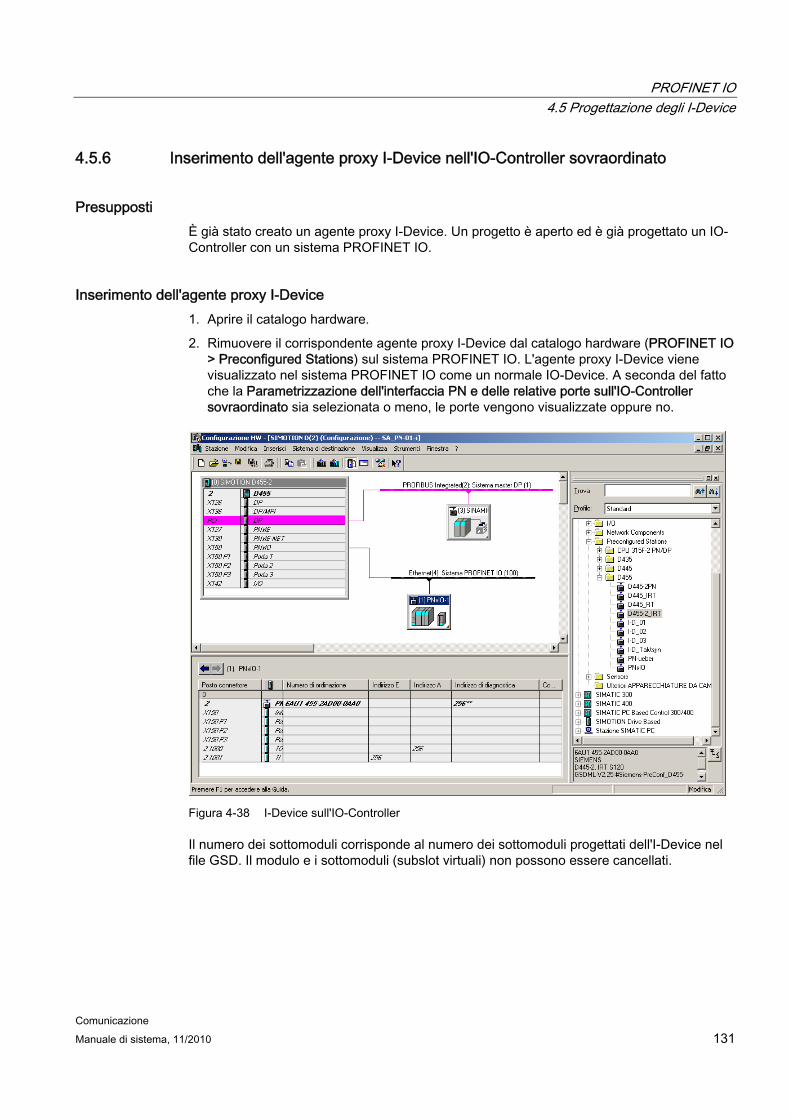
PROFINET IO 4.5 Progettazione degli I-Device
Comunicazione Manuale di sistema, 11/2010 131
4.5.6 Inserimento dell'agente proxy I-Device nell'IO-Controller sovraordinato
Presupposti È già stato creato un agente proxy I-Device. Un progetto è aperto ed è già progettato un IO-Controller con un sistema PROFINET IO.
Inserimento dell'agente proxy I-Device 1. Aprire il catalogo hardware.
2. Rimuovere il corrispondente agente proxy I-Device dal catalogo hardware (PROFINET IO > Preconfigured Stations) sul sistema PROFINET IO. L'agente proxy I-Device viene visualizzato nel sistema PROFINET IO come un normale IO-Device. A seconda del fatto che la Parametrizzazione dell'interfaccia PN e delle relative porte sull'IO-Controller sovraordinato sia selezionata o meno, le porte vengono visualizzate oppure no.
Figura 4-38 I-Device sull'IO-Controller
Il numero dei sottomoduli corrisponde al numero dei sottomoduli progettati dell'I-Device nel file GSD. Il modulo e i sottomoduli (subslot virtuali) non possono essere cancellati.
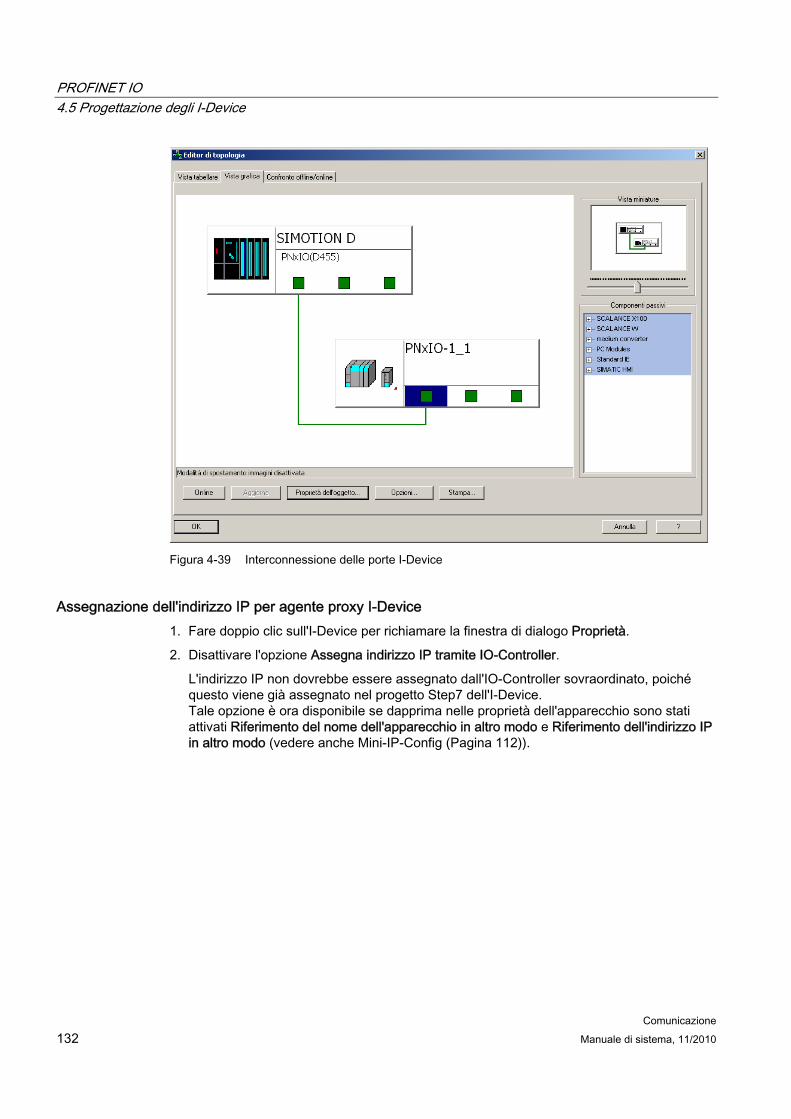
PROFINET IO 4.5 Progettazione degli I-Device
Comunicazione 132 Manuale di sistema, 11/2010
Figura 4-39 Interconnessione delle porte I-Device
Assegnazione dell'indirizzo IP per agente proxy I-Device 1. Fare doppio clic sull'I-Device per richiamare la finestra di dialogo Proprietà.
2. Disattivare l'opzione Assegna indirizzo IP tramite IO-Controller.
L'indirizzo IP non dovrebbe essere assegnato dall'IO-Controller sovraordinato, poiché questo viene già assegnato nel progetto Step7 dell'I-Device. Tale opzione è ora disponibile se dapprima nelle proprietà dell'apparecchio sono stati attivati Riferimento del nome dell'apparecchio in altro modo e Riferimento dell'indirizzo IP in altro modo (vedere anche Mini-IP-Config (Pagina 112)).
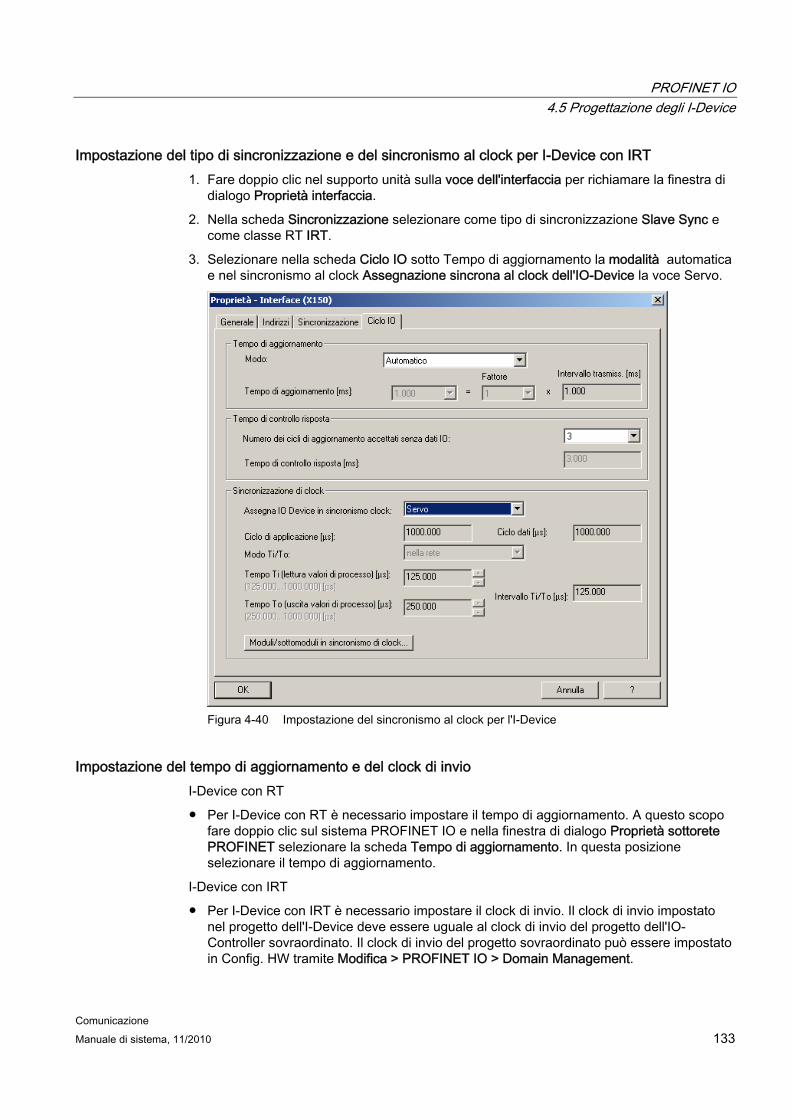
PROFINET IO 4.5 Progettazione degli I-Device
Comunicazione Manuale di sistema, 11/2010 133
Impostazione del tipo di sincronizzazione e del sincronismo al clock per I-Device con IRT 1. Fare doppio clic nel supporto unità sulla voce dell'interfaccia per richiamare la finestra di
dialogo Proprietà interfaccia.
2. Nella scheda Sincronizzazione selezionare come tipo di sincronizzazione Slave Sync e come classe RT IRT.
3. Selezionare nella scheda Ciclo IO sotto Tempo di aggiornamento la modalità automatica e nel sincronismo al clock Assegnazione sincrona al clock dell'IO-Device la voce Servo.
Figura 4-40 Impostazione del sincronismo al clock per l'I-Device
Impostazione del tempo di aggiornamento e del clock di invio I-Device con RT
● Per I-Device con RT è necessario impostare il tempo di aggiornamento. A questo scopo fare doppio clic sul sistema PROFINET IO e nella finestra di dialogo Proprietà sottorete PROFINET selezionare la scheda Tempo di aggiornamento. In questa posizione selezionare il tempo di aggiornamento.
I-Device con IRT
● Per I-Device con IRT è necessario impostare il clock di invio. Il clock di invio impostato nel progetto dell'I-Device deve essere uguale al clock di invio del progetto dell'IO-Controller sovraordinato. Il clock di invio del progetto sovraordinato può essere impostato in Config. HW tramite Modifica > PROFINET IO > Domain Management.
PROFINET IO 4.6 Caricamento progettazione della comunicazione
Comunicazione 134 Manuale di sistema, 11/2010
4.5.7 Come cancellare un agente proxy I-Device I file GSD per gli agenti proxy I-Device in Preconfigured Stations si trovano nella directory seguente:
<Program Files>\Siemens\Step7\S7DATA\GSD, ad es. GSDML-V2.25-#Siemens-PreConf_D455-2_IRT-20100830-132044.xml.
D455-2_IRT è il nome dell'agente proxy I-Device. Gli agenti proxy I-Device si possono cancellare eliminando i relativi file XML. La visualizzazione degli agenti proxy I-Device in Preconfigured Stations viene aggiornata solo dopo la ripetizione di creazione e installazione di un file GSD.
4.6 Caricamento progettazione della comunicazione
4.6.1 Caricamento progettazione PROFINET IO
Presupposti Vi è un PG/PC collegato, con il quale è possibile connettersi ONLINE.
Procedimento Al termine della progettazione di PROFINET IO i dati di progettazione devono essere caricati in tutti i controller interessati.
1. Contrassegnare in NetPro la sottorete Ethernet e selezionare il comando di menu Sistema di destinazione > Carica nel progetto attuale > Stazioni nella sottorete.
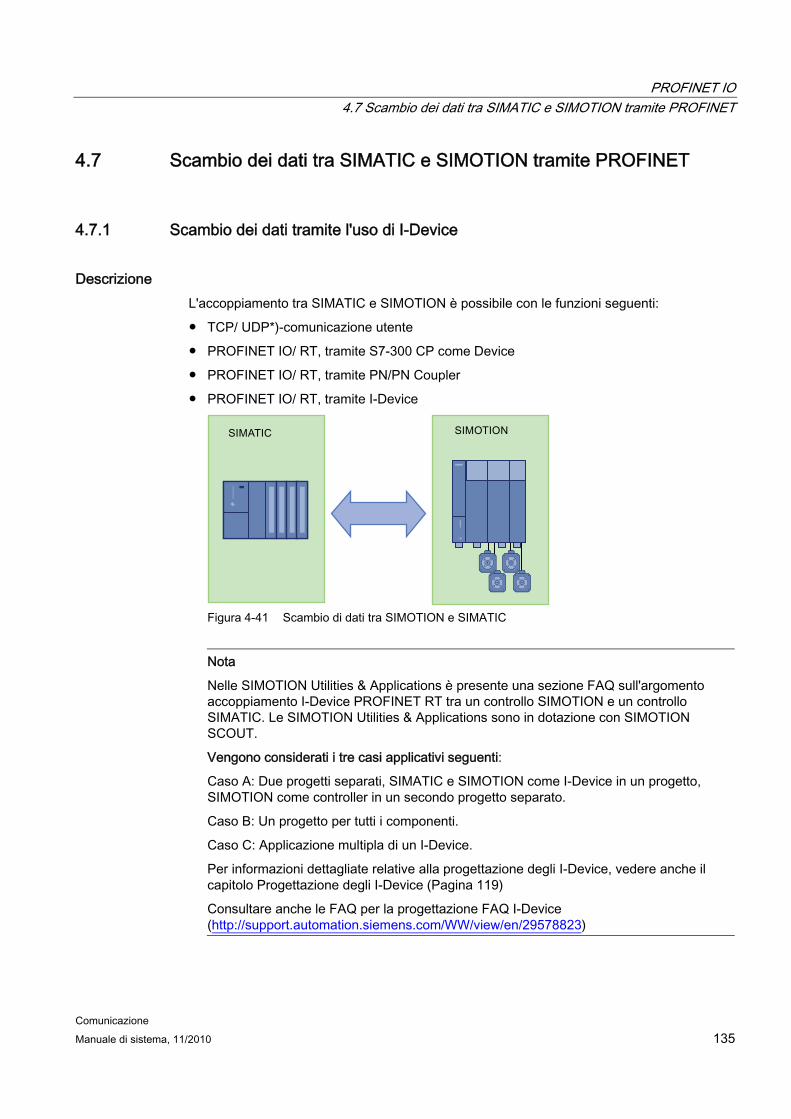
PROFINET IO 4.7 Scambio dei dati tra SIMATIC e SIMOTION tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 135
4.7 Scambio dei dati tra SIMATIC e SIMOTION tramite PROFINET
4.7.1 Scambio dei dati tramite l'uso di I-Device
Descrizione L'accoppiamento tra SIMATIC e SIMOTION è possibile con le funzioni seguenti:
● TCP/ UDP*)-comunicazione utente
● PROFINET IO/ RT, tramite S7-300 CP come Device
● PROFINET IO/ RT, tramite PN/PN Coupler
● PROFINET IO/ RT, tramite I-Device
Figura 4-41 Scambio di dati tra SIMOTION e SIMATIC
Nota
Nelle SIMOTION Utilities & Applications è presente una sezione FAQ sull'argomento accoppiamento I-Device PROFINET RT tra un controllo SIMOTION e un controllo SIMATIC. Le SIMOTION Utilities & Applications sono in dotazione con SIMOTION SCOUT.
Vengono considerati i tre casi applicativi seguenti:
Caso A: Due progetti separati, SIMATIC e SIMOTION come I-Device in un progetto, SIMOTION come controller in un secondo progetto separato.
Caso B: Un progetto per tutti i componenti.
Caso C: Applicazione multipla di un I-Device.
Per informazioni dettagliate relative alla progettazione degli I-Device, vedere anche il capitolo Progettazione degli I-Device (Pagina 119)
Consultare anche le FAQ per la progettazione FAQ I-Device (http://support.automation.siemens.com/WW/view/en/29578823)
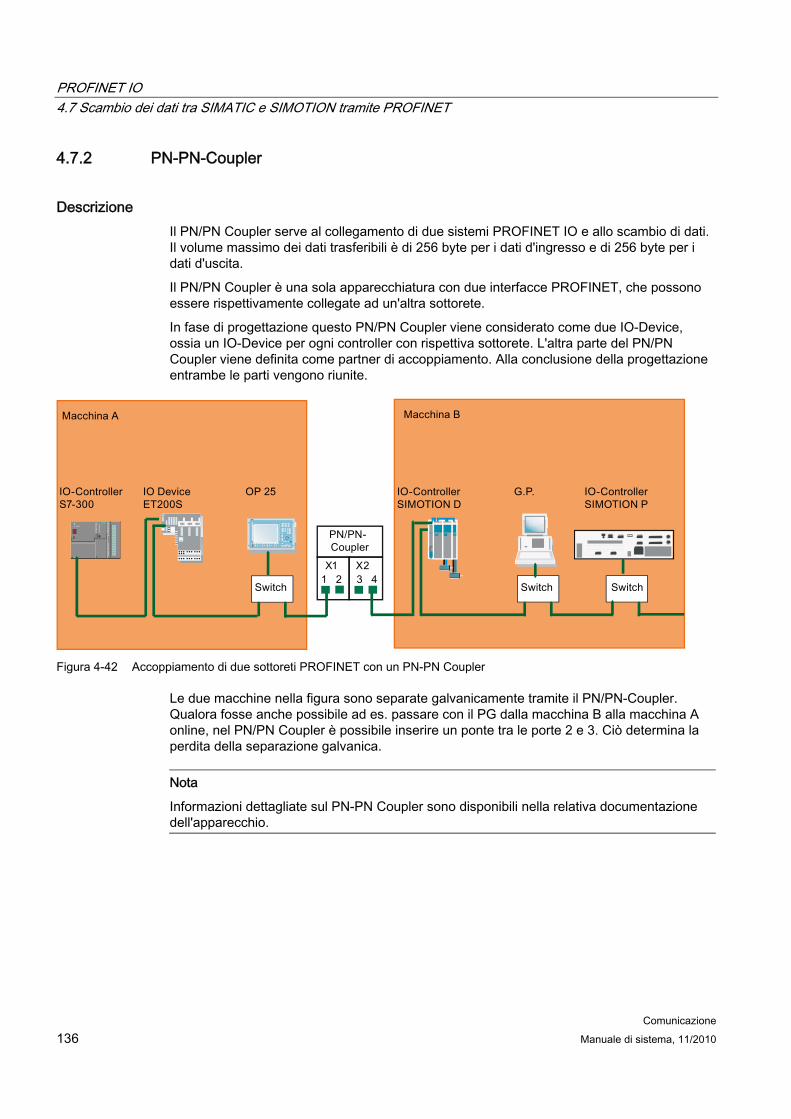
PROFINET IO 4.7 Scambio dei dati tra SIMATIC e SIMOTION tramite PROFINET
Comunicazione 136 Manuale di sistema, 11/2010
4.7.2 PN-PN-Coupler
Descrizione Il PN/PN Coupler serve al collegamento di due sistemi PROFINET IO e allo scambio di dati. Il volume massimo dei dati trasferibili è di 256 byte per i dati d'ingresso e di 256 byte per i dati d'uscita.
Il PN/PN Coupler è una sola apparecchiatura con due interfacce PROFINET, che possono essere rispettivamente collegate ad un'altra sottorete.
In fase di progettazione questo PN/PN Coupler viene considerato come due IO-Device, ossia un IO-Device per ogni controller con rispettiva sottorete. L'altra parte del PN/PN Coupler viene definita come partner di accoppiamento. Alla conclusione della progettazione entrambe le parti vengono riunite.
Figura 4-42 Accoppiamento di due sottoreti PROFINET con un PN-PN Coupler
Le due macchine nella figura sono separate galvanicamente tramite il PN/PN-Coupler. Qualora fosse anche possibile ad es. passare con il PG dalla macchina B alla macchina A online, nel PN/PN Coupler è possibile inserire un ponte tra le porte 2 e 3. Ciò determina la perdita della separazione galvanica.
Nota
Informazioni dettagliate sul PN-PN Coupler sono disponibili nella relativa documentazione dell'apparecchio.
PROFINET IO 4.7 Scambio dei dati tra SIMATIC e SIMOTION tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 137
Progettazione PN/PN Coupler
Per la progettazione del PN/PN-Coupler vengono creati due apparecchi PROFINET, il lato sinistro (X1) e quello destro (X2). Il PN/PN Coupler viene progettato con Config HW. Se le due sottoreti sono progettate in uno stesso progetto, con STEP 7 è possibile progettare il PN/PN Coupler per entrambe. Se le sottoreti sono progettate in diversi progetti, il Coupler deve essere progettato in ognuno di essi.
Nota
Il PN/PN-Coupler viene impiegato per lo scambio di dati tra SIMOTION e SIMATIC. Inoltre costituisce la soluzione preferita per lo scambio rapido di segnali F tra CPU SIMATIC.
4.7.3 Comunicazione tramite protocolli standard
Descrizione Com TCP e UDP è possibile lo scambio di dati tra SIMOTION, SIMATIC, altri controlli e sistemi esterni. L'interfaccia PROFINET è un'interfaccia Ethernet standard e supporta questi protocolli. La gestione della connessione deve avvenire tramite il programma utente. Attraverso questa connessione può avvenire lo scambio di dati tra una CPU SIMATIC e un controller SIMOTION tramite PROFINET.
UDP è un protocollo a perdita di collegamento; ciò significa che non viene inviata alcuna conferma di ricezione del messaggio da parte del destinatario. TCP è un protocollo orientato al collegamento; ciò significa che per prima cosa viene realizzato un collegamento logico. Solo dopo la creazione di tale collegamento avviene la trasmissione. Il collegamento, cioè la ricezione dei messaggi, viene monitorato.
Scambio dei dati tramite TCP:
● Creazione di un collegamento
● Gestione dei dati
● Sorveglianza del collegamento
● Eliminazione del collegamento
L'utilizzo dei comandi di sistema è illustrato in dettaglio nel paragrafo Informazioni generali su Ethernet (collegamenti TCP/IP e UDP).
Vedere anche Panoramica delle funzioni di sistema SIMOTION (Pagina 158)
Panoramica delle funzioni di sistema SIMOTION (Pagina 178)
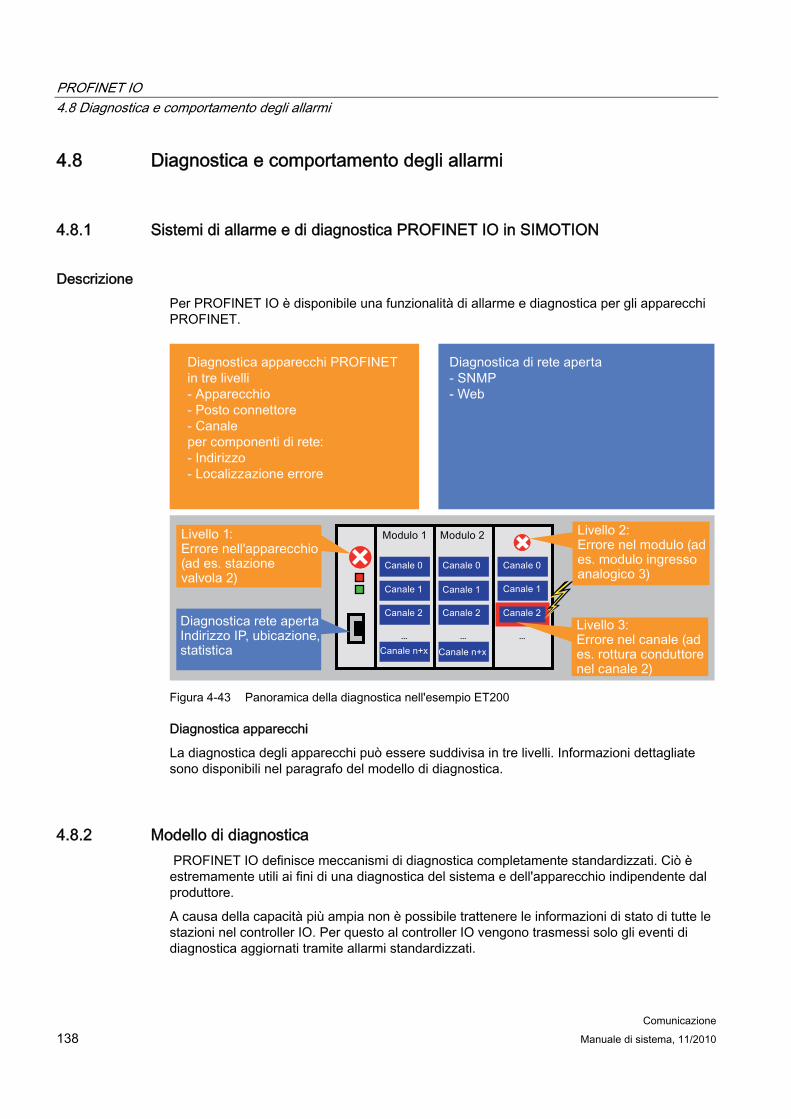
PROFINET IO 4.8 Diagnostica e comportamento degli allarmi
Comunicazione 138 Manuale di sistema, 11/2010
4.8 Diagnostica e comportamento degli allarmi
4.8.1 Sistemi di allarme e di diagnostica PROFINET IO in SIMOTION
Descrizione Per PROFINET IO è disponibile una funzionalità di allarme e diagnostica per gli apparecchi PROFINET.
... ... ...
Figura 4-43 Panoramica della diagnostica nell'esempio ET200
Diagnostica apparecchi
La diagnostica degli apparecchi può essere suddivisa in tre livelli. Informazioni dettagliate sono disponibili nel paragrafo del modello di diagnostica.
4.8.2 Modello di diagnostica PROFINET IO definisce meccanismi di diagnostica completamente standardizzati. Ciò è estremamente utili ai fini di una diagnostica del sistema e dell'apparecchio indipendente dal produttore.
A causa della capacità più ampia non è possibile trattenere le informazioni di stato di tutte le stazioni nel controller IO. Per questo al controller IO vengono trasmessi solo gli eventi di diagnostica aggiornati tramite allarmi standardizzati.
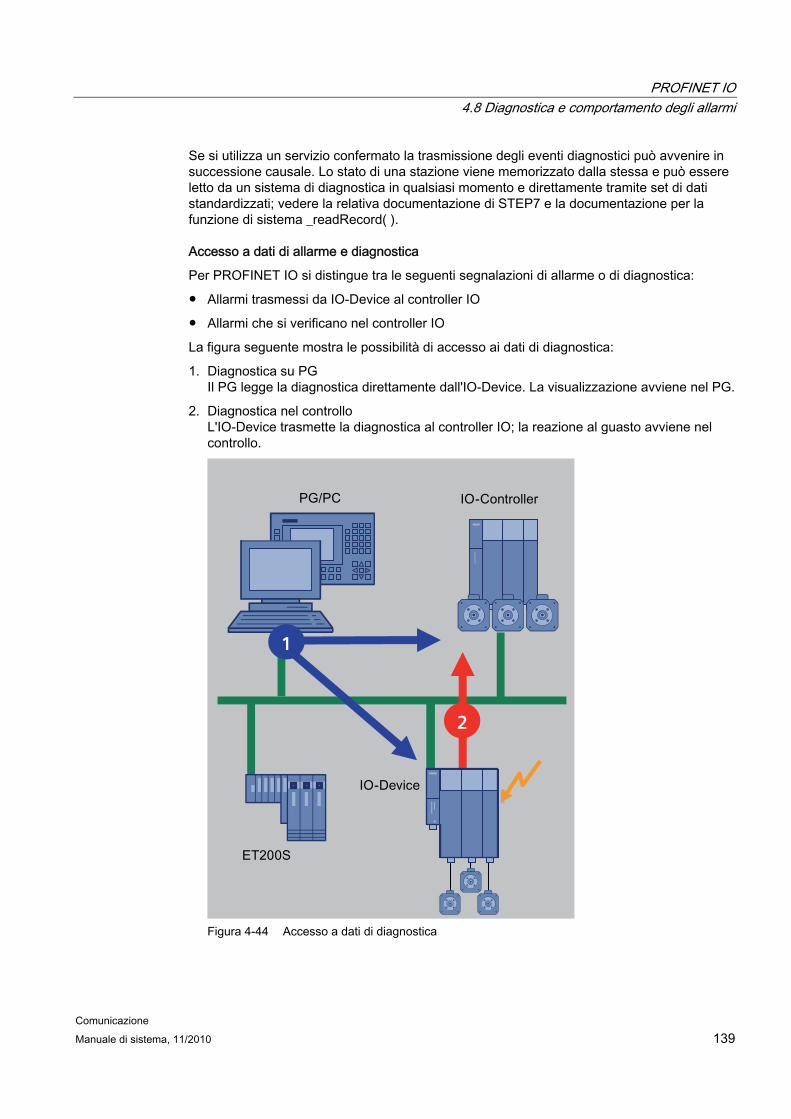
PROFINET IO 4.8 Diagnostica e comportamento degli allarmi
Comunicazione Manuale di sistema, 11/2010 139
Se si utilizza un servizio confermato la trasmissione degli eventi diagnostici può avvenire in successione causale. Lo stato di una stazione viene memorizzato dalla stessa e può essere letto da un sistema di diagnostica in qualsiasi momento e direttamente tramite set di dati standardizzati; vedere la relativa documentazione di STEP7 e la documentazione per la funzione di sistema _readRecord( ).
Accesso a dati di allarme e diagnostica
Per PROFINET IO si distingue tra le seguenti segnalazioni di allarme o di diagnostica:
● Allarmi trasmessi da IO-Device al controller IO
● Allarmi che si verificano nel controller IO
La figura seguente mostra le possibilità di accesso ai dati di diagnostica:
1. Diagnostica su PG Il PG legge la diagnostica direttamente dall'IO-Device. La visualizzazione avviene nel PG.
2. Diagnostica nel controllo L'IO-Device trasmette la diagnostica al controller IO; la reazione al guasto avviene nel controllo.
1
2
Figura 4-44 Accesso a dati di diagnostica
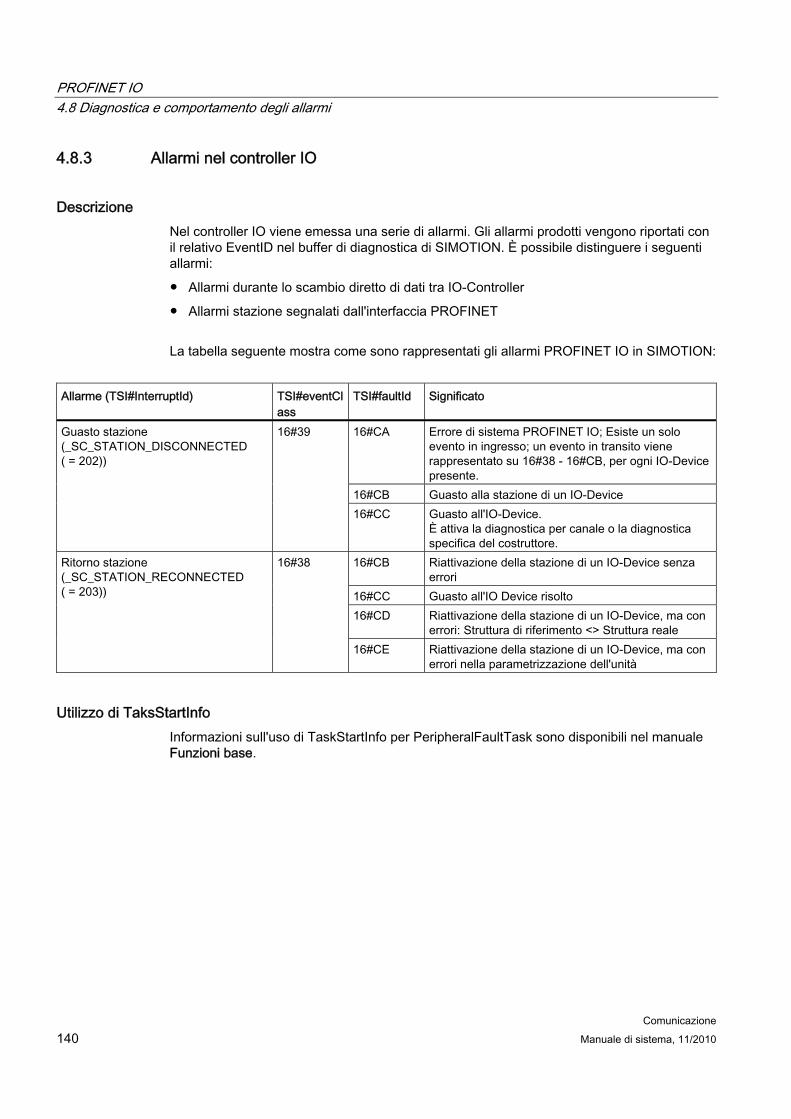
PROFINET IO 4.8 Diagnostica e comportamento degli allarmi
Comunicazione 140 Manuale di sistema, 11/2010
4.8.3 Allarmi nel controller IO
Descrizione Nel controller IO viene emessa una serie di allarmi. Gli allarmi prodotti vengono riportati con il relativo EventID nel buffer di diagnostica di SIMOTION. È possibile distinguere i seguenti allarmi:
● Allarmi durante lo scambio diretto di dati tra IO-Controller
● Allarmi stazione segnalati dall'interfaccia PROFINET
La tabella seguente mostra come sono rappresentati gli allarmi PROFINET IO in SIMOTION:
Allarme (TSI#InterruptId) TSI#eventCl
ass TSI#faultId Significato
16#CA Errore di sistema PROFINET IO; Esiste un solo evento in ingresso; un evento in transito viene rappresentato su 16#38 - 16#CB, per ogni IO-Device presente.
16#CB Guasto alla stazione di un IO-Device
Guasto stazione (_SC_STATION_DISCONNECTED ( = 202))
16#39
16#CC Guasto all'IO-Device. È attiva la diagnostica per canale o la diagnostica specifica del costruttore.
16#CB Riattivazione della stazione di un IO-Device senza errori
16#CC Guasto all'IO Device risolto 16#CD Riattivazione della stazione di un IO-Device, ma con
errori: Struttura di riferimento <> Struttura reale
Ritorno stazione (_SC_STATION_RECONNECTED ( = 203))
16#38
16#CE Riattivazione della stazione di un IO-Device, ma con errori nella parametrizzazione dell'unità
Utilizzo di TaksStartInfo Informazioni sull'uso di TaskStartInfo per PeripheralFaultTask sono disponibili nel manuale Funzioni base.
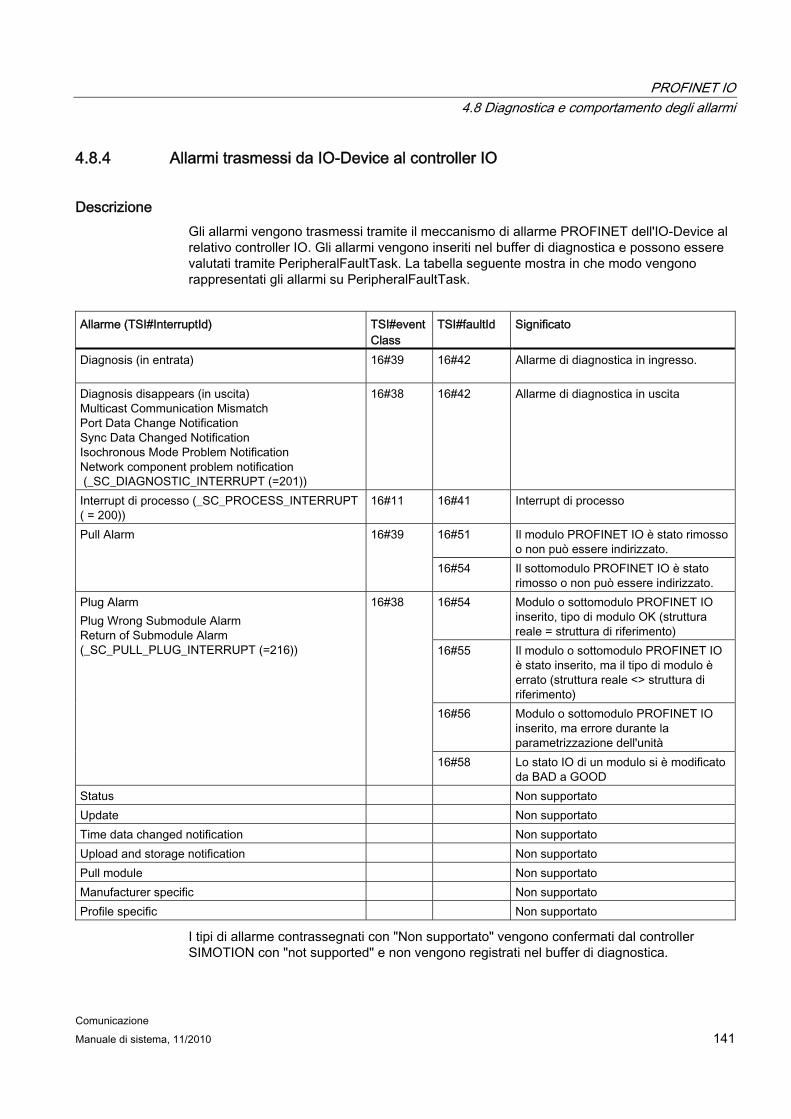
PROFINET IO 4.8 Diagnostica e comportamento degli allarmi
Comunicazione Manuale di sistema, 11/2010 141
4.8.4 Allarmi trasmessi da IO-Device al controller IO
Descrizione Gli allarmi vengono trasmessi tramite il meccanismo di allarme PROFINET dell'IO-Device al relativo controller IO. Gli allarmi vengono inseriti nel buffer di diagnostica e possono essere valutati tramite PeripheralFaultTask. La tabella seguente mostra in che modo vengono rappresentati gli allarmi su PeripheralFaultTask.
Allarme (TSI#InterruptId) TSI#event
Class TSI#faultId Significato
Diagnosis (in entrata)
16#39 16#42 Allarme di diagnostica in ingresso.
Diagnosis disappears (in uscita) Multicast Communication Mismatch Port Data Change Notification Sync Data Changed Notification Isochronous Mode Problem Notification Network component problem notification (_SC_DIAGNOSTIC_INTERRUPT (=201))
16#38 16#42 Allarme di diagnostica in uscita
Interrupt di processo (_SC_PROCESS_INTERRUPT ( = 200))
16#11 16#41 Interrupt di processo
16#51 Il modulo PROFINET IO è stato rimosso o non può essere indirizzato.
Pull Alarm
16#39
16#54 Il sottomodulo PROFINET IO è stato rimosso o non può essere indirizzato.
16#54 Modulo o sottomodulo PROFINET IO inserito, tipo di modulo OK (struttura reale = struttura di riferimento)
16#55 Il modulo o sottomodulo PROFINET IO è stato inserito, ma il tipo di modulo è errato (struttura reale <> struttura di riferimento)
16#56 Modulo o sottomodulo PROFINET IO inserito, ma errore durante la parametrizzazione dell'unità
Plug Alarm Plug Wrong Submodule Alarm Return of Submodule Alarm (_SC_PULL_PLUG_INTERRUPT (=216))
16#38
16#58 Lo stato IO di un modulo si è modificato da BAD a GOOD
Status Non supportato Update Non supportato Time data changed notification Non supportato Upload and storage notification Non supportato Pull module Non supportato Manufacturer specific Non supportato Profile specific Non supportato
I tipi di allarme contrassegnati con "Non supportato" vengono confermati dal controller SIMOTION con "not supported" e non vengono registrati nel buffer di diagnostica.

PROFINET IO 4.8 Diagnostica e comportamento degli allarmi
Comunicazione 142 Manuale di sistema, 11/2010
Utilizzo di TaksStartInfo Informazioni sull'uso di TaskStartInfo per PeripheralFaultTask sono disponibili nel manuale Funzioni di base SIMOTION.
Trasferimento dei dati di diagnostica Il motivo esatto dell'allarme viene reso disponibile in forma di dati di diagnostica, che possono essere letti tramite la funzione _readDiagnosticData(). La lunghezza è limitata a 240 byte.
A partire da V4.2 con il blocco funzionale _readVariableDiagnosticData() è possibile leggere i dati di diagnostica di una stazione / di un modulo attraverso il programma utente fino a 65535 byte.
Esempio di programma per la lettura di informazioni TSI# di PeripheralFaultTask ; .... ; Dichiarazione delle variabili PHERIPHERIE_Alarminfo : STRUCT ALH_internalID : UDINT; ALH_EingangsAdresse : DINT; ALH_AusgangsAdresse : DINT; ALH_DiagnoseAdresse : DINT; ALH_Details : DWORD; ALH_Starttime : DATE_AND_TIME; ALH_EventClass : UINT; ALH_FaultID : UINT; ; .... ; Lettura delle informazioni Fault Task di periferia: P_ALH_Info[p_alhcount].ALH_internalID := TSI#interruptID; P_ALH_Info[p_alhcount].ALH_EingangsAdresse := TSI#logbaseadrin ; P_ALH_Info[p_alhcount].ALH_AusgangsAdresse := TSI#logbaseadrout ; P_ALH_Info[p_alhcount].ALH_DiagnoseAdresse := TSI#logdiagadr ; P_ALH_Info[p_alhcount].ALH_Details := TSI#details ; P_ALH_Info[p_alhcount].ALH_Starttime := TSI#starttime ; P_ALH_Info[p_alhcount].ALH_EventClass := TSI#eventClass ; P_ALH_Info[p_alhcount].ALH_FaultID := TSI#faultID ; ; ....
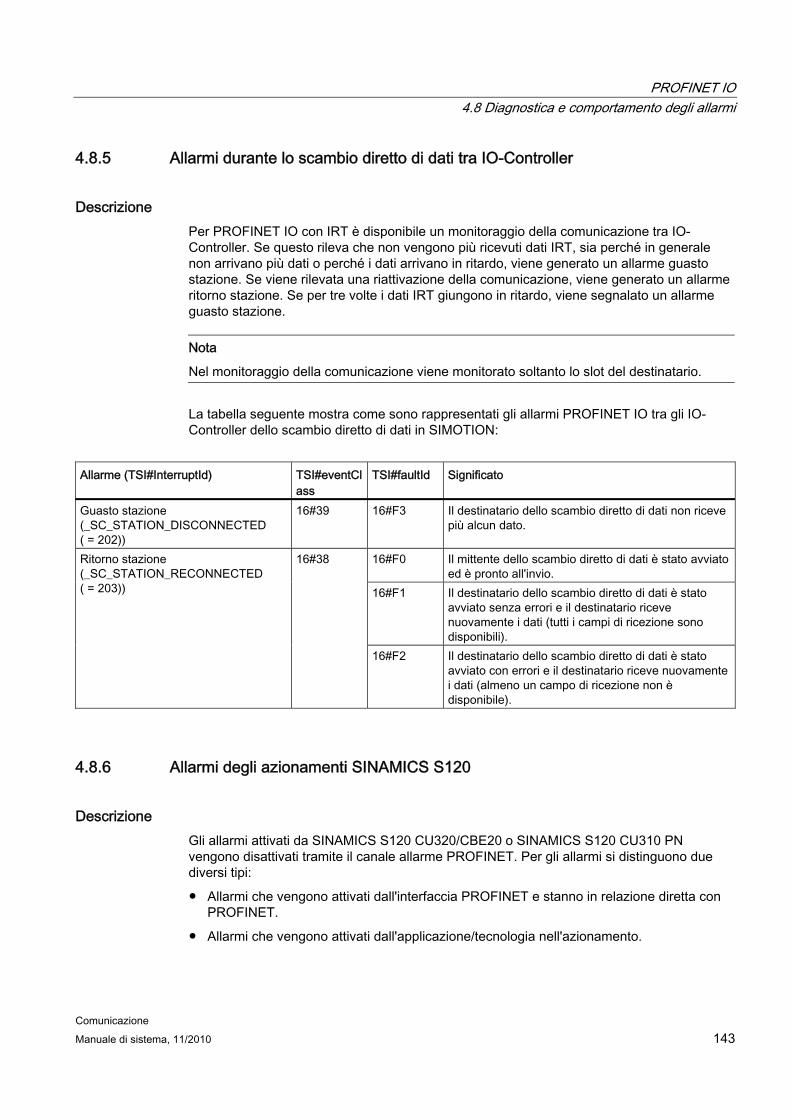
PROFINET IO 4.8 Diagnostica e comportamento degli allarmi
Comunicazione Manuale di sistema, 11/2010 143
4.8.5 Allarmi durante lo scambio diretto di dati tra IO-Controller
Descrizione Per PROFINET IO con IRT è disponibile un monitoraggio della comunicazione tra IO-Controller. Se questo rileva che non vengono più ricevuti dati IRT, sia perché in generale non arrivano più dati o perché i dati arrivano in ritardo, viene generato un allarme guasto stazione. Se viene rilevata una riattivazione della comunicazione, viene generato un allarme ritorno stazione. Se per tre volte i dati IRT giungono in ritardo, viene segnalato un allarme guasto stazione.
Nota
Nel monitoraggio della comunicazione viene monitorato soltanto lo slot del destinatario.
La tabella seguente mostra come sono rappresentati gli allarmi PROFINET IO tra gli IO-Controller dello scambio diretto di dati in SIMOTION:
Allarme (TSI#InterruptId) TSI#eventCl
ass TSI#faultId Significato
Guasto stazione (_SC_STATION_DISCONNECTED ( = 202))
16#39 16#F3 Il destinatario dello scambio diretto di dati non riceve più alcun dato.
16#F0 Il mittente dello scambio diretto di dati è stato avviato ed è pronto all'invio.
16#F1 Il destinatario dello scambio diretto di dati è stato avviato senza errori e il destinatario riceve nuovamente i dati (tutti i campi di ricezione sono disponibili).
Ritorno stazione (_SC_STATION_RECONNECTED ( = 203))
16#38
16#F2 Il destinatario dello scambio diretto di dati è stato avviato con errori e il destinatario riceve nuovamente i dati (almeno un campo di ricezione non è disponibile).
4.8.6 Allarmi degli azionamenti SINAMICS S120
Descrizione Gli allarmi attivati da SINAMICS S120 CU320/CBE20 o SINAMICS S120 CU310 PN vengono disattivati tramite il canale allarme PROFINET. Per gli allarmi si distinguono due diversi tipi:
● Allarmi che vengono attivati dall'interfaccia PROFINET e stanno in relazione diretta con PROFINET.
● Allarmi che vengono attivati dall'applicazione/tecnologia nell'azionamento.
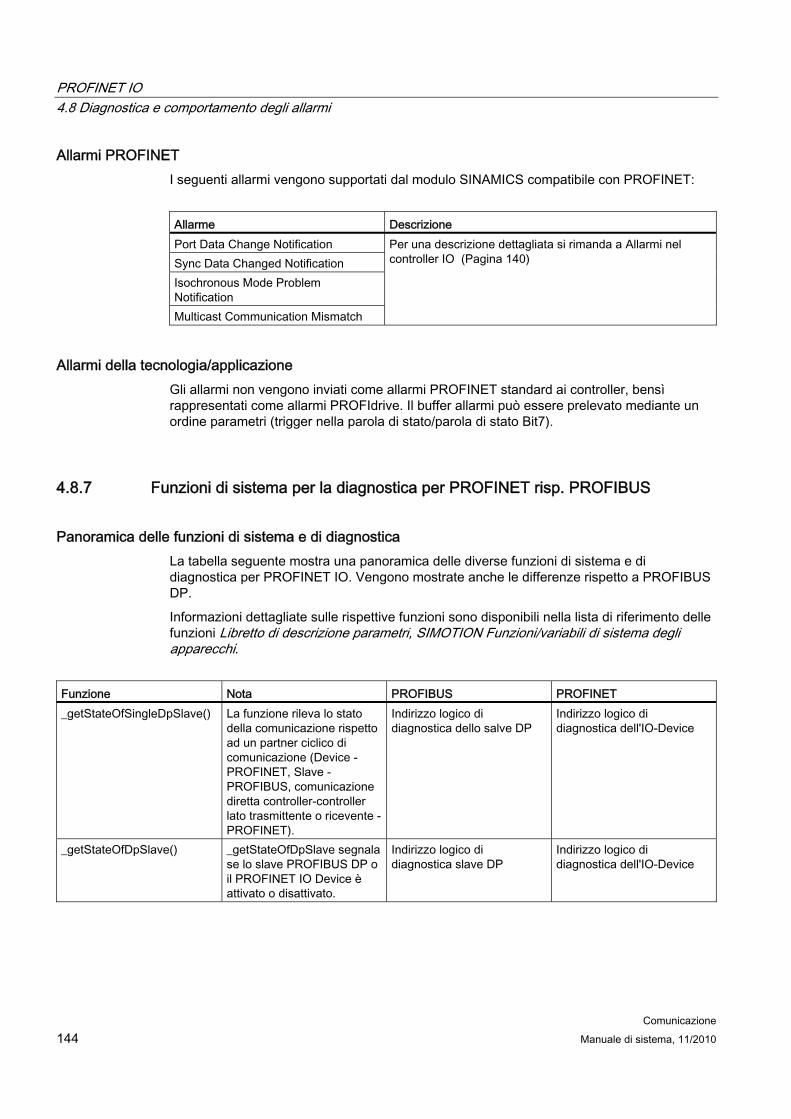
PROFINET IO 4.8 Diagnostica e comportamento degli allarmi
Comunicazione 144 Manuale di sistema, 11/2010
Allarmi PROFINET I seguenti allarmi vengono supportati dal modulo SINAMICS compatibile con PROFINET:
Allarme Descrizione Port Data Change Notification Sync Data Changed Notification Isochronous Mode Problem Notification Multicast Communication Mismatch
Per una descrizione dettagliata si rimanda a Allarmi nel controller IO (Pagina 140)
Allarmi della tecnologia/applicazione Gli allarmi non vengono inviati come allarmi PROFINET standard ai controller, bensì rappresentati come allarmi PROFIdrive. Il buffer allarmi può essere prelevato mediante un ordine parametri (trigger nella parola di stato/parola di stato Bit7).
4.8.7 Funzioni di sistema per la diagnostica per PROFINET risp. PROFIBUS
Panoramica delle funzioni di sistema e di diagnostica La tabella seguente mostra una panoramica delle diverse funzioni di sistema e di diagnostica per PROFINET IO. Vengono mostrate anche le differenze rispetto a PROFIBUS DP.
Informazioni dettagliate sulle rispettive funzioni sono disponibili nella lista di riferimento delle funzioni Libretto di descrizione parametri, SIMOTION Funzioni/variabili di sistema degli apparecchi.
Funzione Nota PROFIBUS PROFINET _getStateOfSingleDpSlave() La funzione rileva lo stato
della comunicazione rispetto ad un partner ciclico di comunicazione (Device - PROFINET, Slave - PROFIBUS, comunicazione diretta controller-controller lato trasmittente o ricevente - PROFINET).
Indirizzo logico di diagnostica dello salve DP
Indirizzo logico di diagnostica dell'IO-Device
_getStateOfDpSlave() _getStateOfDpSlave segnala se lo slave PROFIBUS DP o il PROFINET IO Device è attivato o disattivato.
Indirizzo logico di diagnostica slave DP
Indirizzo logico di diagnostica dell'IO-Device
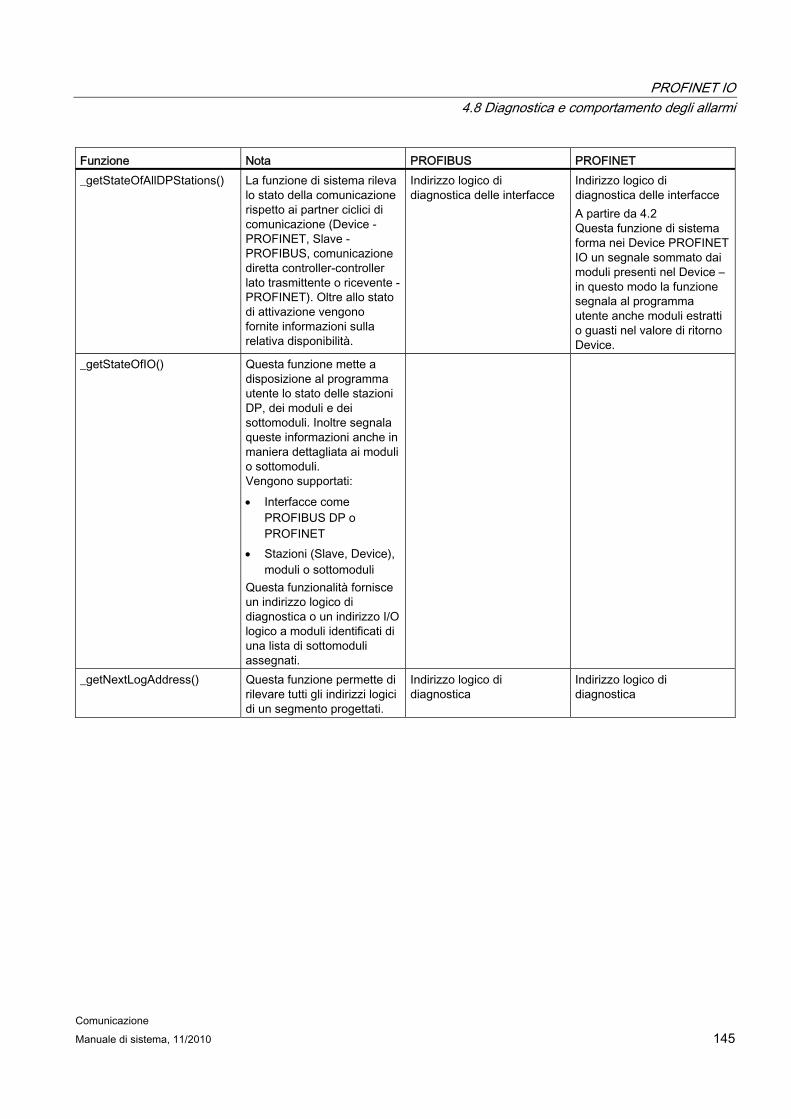
PROFINET IO 4.8 Diagnostica e comportamento degli allarmi
Comunicazione Manuale di sistema, 11/2010 145
Funzione Nota PROFIBUS PROFINET _getStateOfAllDPStations() La funzione di sistema rileva
lo stato della comunicazione rispetto ai partner ciclici di comunicazione (Device - PROFINET, Slave - PROFIBUS, comunicazione diretta controller-controller lato trasmittente o ricevente - PROFINET). Oltre allo stato di attivazione vengono fornite informazioni sulla relativa disponibilità.
Indirizzo logico di diagnostica delle interfacce
Indirizzo logico di diagnostica delle interfacce A partire da 4.2 Questa funzione di sistema forma nei Device PROFINET IO un segnale sommato dai moduli presenti nel Device – in questo modo la funzione segnala al programma utente anche moduli estratti o guasti nel valore di ritorno Device.
_getStateOfIO() Questa funzione mette a disposizione al programma utente lo stato delle stazioni DP, dei moduli e dei sottomoduli. Inoltre segnala queste informazioni anche in maniera dettagliata ai moduli o sottomoduli. Vengono supportati: Interfacce come
PROFIBUS DP o PROFINET
Stazioni (Slave, Device), moduli o sottomoduli
Questa funzionalità fornisce un indirizzo logico di diagnostica o un indirizzo I/O logico a moduli identificati di una lista di sottomoduli assegnati.
_getNextLogAddress() Questa funzione permette di rilevare tutti gli indirizzi logici di un segmento progettati.
Indirizzo logico di diagnostica
Indirizzo logico di diagnostica
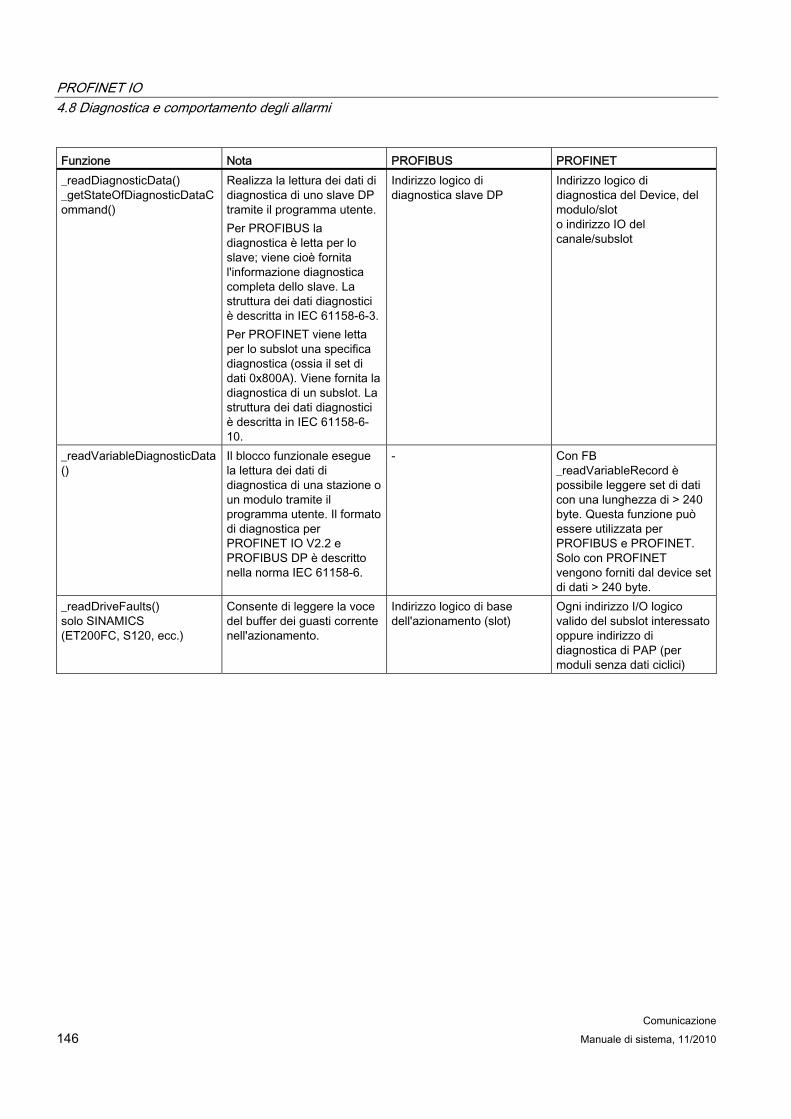
PROFINET IO 4.8 Diagnostica e comportamento degli allarmi
Comunicazione 146 Manuale di sistema, 11/2010
Funzione Nota PROFIBUS PROFINET _readDiagnosticData() _getStateOfDiagnosticDataCommand()
Realizza la lettura dei dati di diagnostica di uno slave DP tramite il programma utente. Per PROFIBUS la diagnostica è letta per lo slave; viene cioè fornita l'informazione diagnostica completa dello slave. La struttura dei dati diagnostici è descritta in IEC 61158-6-3. Per PROFINET viene letta per lo subslot una specifica diagnostica (ossia il set di dati 0x800A). Viene fornita la diagnostica di un subslot. La struttura dei dati diagnostici è descritta in IEC 61158-6-10.
Indirizzo logico di diagnostica slave DP
Indirizzo logico di diagnostica del Device, del modulo/slot o indirizzo IO del canale/subslot
_readVariableDiagnosticData()
Il blocco funzionale esegue la lettura dei dati di diagnostica di una stazione o un modulo tramite il programma utente. Il formato di diagnostica per PROFINET IO V2.2 e PROFIBUS DP è descritto nella norma IEC 61158-6.
- Con FB _readVariableRecord è possibile leggere set di dati con una lunghezza di > 240 byte. Questa funzione può essere utilizzata per PROFIBUS e PROFINET. Solo con PROFINET vengono forniti dal device set di dati > 240 byte.
_readDriveFaults() solo SINAMICS (ET200FC, S120, ecc.)
Consente di leggere la voce del buffer dei guasti corrente nell'azionamento.
Indirizzo logico di base dell'azionamento (slot)
Ogni indirizzo I/O logico valido del subslot interessato oppure indirizzo di diagnostica di PAP (per moduli senza dati ciclici)
PROFINET IO 4.8 Diagnostica e comportamento degli allarmi
Comunicazione Manuale di sistema, 11/2010 147
4.8.8 Diagnostica apparecchi PROFINET in STEP 7
Diagnostica apparecchi in STEP 7 Tramite Config HW la diagnostica apparecchi può avvenire in SCOUT in modalità ONLINE tramite PROFINET. La diagnostica fornisce, oltre a connettore e numero di canale, il tipo di errore. La diagnostica funziona in modo analogo a PROFIBUS.
Procedimento 1. Passare alla modalità ONLINE e richiamare Config HW per il corrispondente apparecchio
SIMOTION.
2. Selezionare Sistema di destinazione > Diagnostica, monitoraggio/comando nodi Ethernet. Config HW ricerca tutti i nodi di rete. La finestra (Diagnostica) ONLINE viene visualizzata e mostra i nodi di rete.
3. Fare clic con il pulsante destro del mouse sul nodo desiderato e selezionare Proprietà. Viene visualizzata la diagnostica dettagliata. Qui viene mostrato l'errore corrispondente.
4.8.9 Allarmi di diagnostica PROFINET IO e DS0
4.8.9.1 Principio di manutenzione allarme di diagnostica PROFINET IO
Descrizione Un apparecchio o un'unità di un sistema di automazione possono avere fondamentalmente gli stati buono (Good) o guasto (Failure). Per aumentare la disponibilità di sensori/attuatori, apparecchi e unità, da questi stessi componenti, oltre a questi due stati, vengono fornite ulteriori informazioni per una necessaria manutenzione. Queste informazioni aggiuntive comprendono i dati per lo stato di manutenzione, lo stato di usura, la durata della vita ecc. Qui si parla di un principio di manutenzione ampliato. Scopo del principio di manutenzione ampliato è il riconoscimento e l'eliminazione anticipati di guasti potenziali - prima ancora di giungere ad un guasto di produzione. Inoltre entrambi gli stati buono e/o guasto vengono ampliati con gli stati richiesta di manutenzione (Maintenance required) e/o necessità di manutenzione (Maintenance demanded).
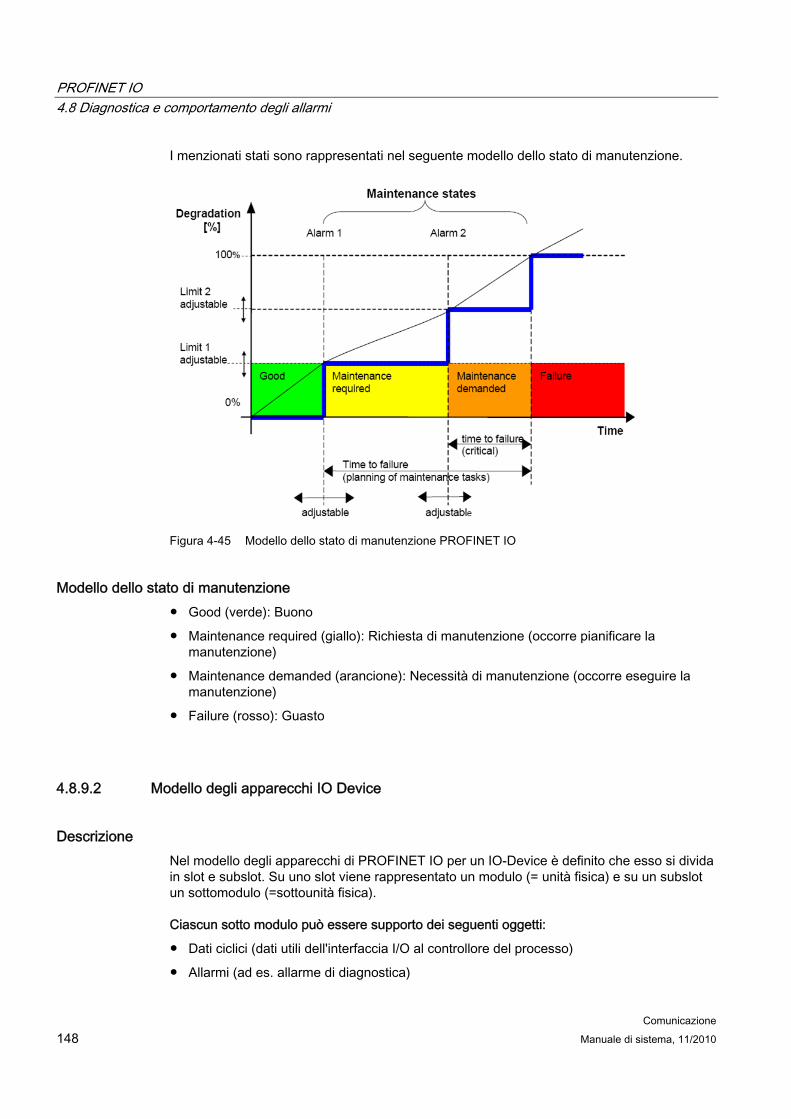
PROFINET IO 4.8 Diagnostica e comportamento degli allarmi
Comunicazione 148 Manuale di sistema, 11/2010
I menzionati stati sono rappresentati nel seguente modello dello stato di manutenzione.
Figura 4-45 Modello dello stato di manutenzione PROFINET IO
Modello dello stato di manutenzione ● Good (verde): Buono
● Maintenance required (giallo): Richiesta di manutenzione (occorre pianificare la manutenzione)
● Maintenance demanded (arancione): Necessità di manutenzione (occorre eseguire la manutenzione)
● Failure (rosso): Guasto
4.8.9.2 Modello degli apparecchi IO Device
Descrizione Nel modello degli apparecchi di PROFINET IO per un IO-Device è definito che esso si divida in slot e subslot. Su uno slot viene rappresentato un modulo (= unità fisica) e su un subslot un sottomodulo (=sottounità fisica).
Ciascun sotto modulo può essere supporto dei seguenti oggetti:
● Dati ciclici (dati utili dell'interfaccia I/O al controllore del processo)
● Allarmi (ad es. allarme di diagnostica)
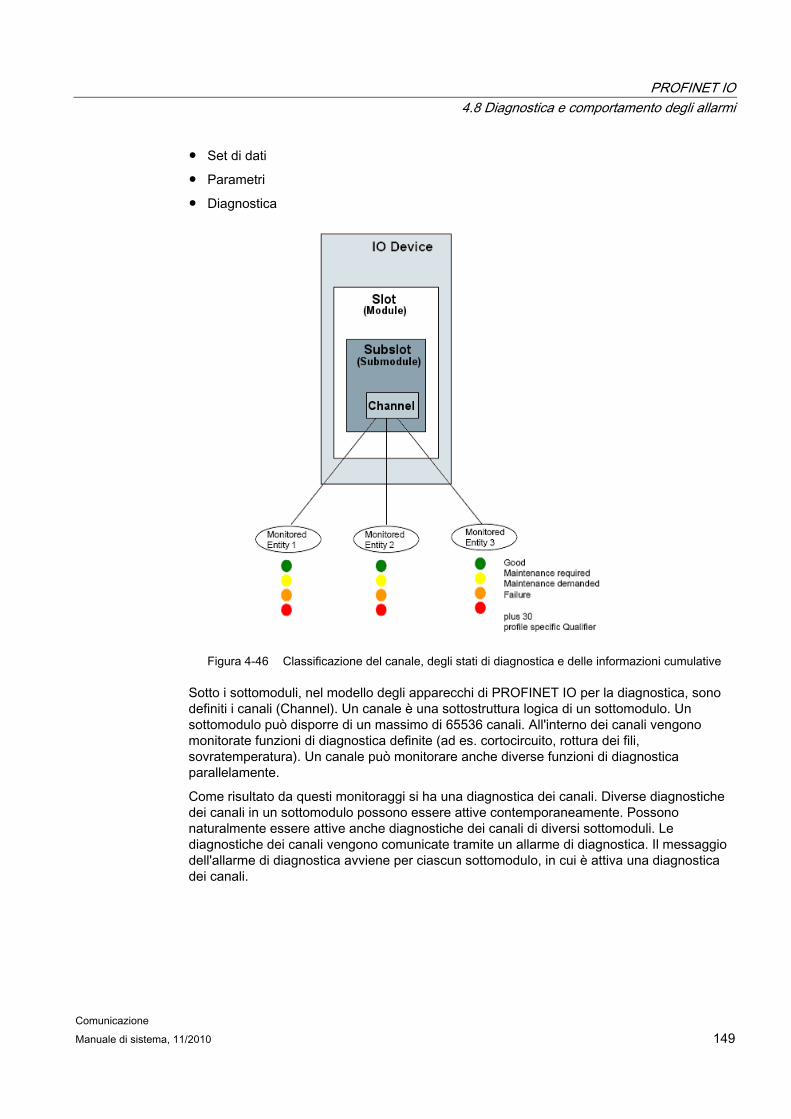
PROFINET IO 4.8 Diagnostica e comportamento degli allarmi
Comunicazione Manuale di sistema, 11/2010 149
● Set di dati
● Parametri
● Diagnostica
Figura 4-46 Classificazione del canale, degli stati di diagnostica e delle informazioni cumulative
Sotto i sottomoduli, nel modello degli apparecchi di PROFINET IO per la diagnostica, sono definiti i canali (Channel). Un canale è una sottostruttura logica di un sottomodulo. Un sottomodulo può disporre di un massimo di 65536 canali. All'interno dei canali vengono monitorate funzioni di diagnostica definite (ad es. cortocircuito, rottura dei fili, sovratemperatura). Un canale può monitorare anche diverse funzioni di diagnostica parallelamente.
Come risultato da questi monitoraggi si ha una diagnostica dei canali. Diverse diagnostiche dei canali in un sottomodulo possono essere attive contemporaneamente. Possono naturalmente essere attive anche diagnostiche dei canali di diversi sottomoduli. Le diagnostiche dei canali vengono comunicate tramite un allarme di diagnostica. Il messaggio dell'allarme di diagnostica avviene per ciascun sottomodulo, in cui è attiva una diagnostica dei canali.

PROFINET IO 4.8 Diagnostica e comportamento degli allarmi
Comunicazione 150 Manuale di sistema, 11/2010
4.8.9.3 Allarmi di diagnostica PROFINET IO e DS0
Descrizione Quando si verifica un evento rilevante per la diagnostica (ad es. guasto o richiesta di manutenzione) in un IO-Device questo genera un allarme di diagnostica e lo invia all'IO-Controller corrispondente. L'apparecchio SIMOTION che funge da IO-Controller comunica quindi un allarme di diagnostica tramite il PeripheralFaultTask con TSI#interruptId = _SC_DIAGNOSTIC_INTERRUPT (= 201). Sotto il TSI#InterruptId si trova il set di dati 0 (DS0) per l'allarme di diagnostica. Il set di dati 0 (DS0) fornisce gli stati cumulativi dei canali (Channel) di un sottomodulo. Un allarme di diagnostica può verificarsi con TSI#eventClass = 0x38, TSI#faultId = 0x42 come allarme di diagnostica in entrata e con TSI#eventClass = 0x39, TSI#faultId = 0x42 come allarme di diagnostica in uscita.
Un allarme di diagnostica possiede per la somma di tutte le funzioni di diagnostica dei canali (Channel) all'interno di un sottomodulo nel set di dati 0 (DS0) i seguenti stati cumulativi sotto forma dei seguenti bit cumulativi:
● Guasto cumulativo: DS0.Byte0.Bit 0
● Richiesta di manutenzione cumulativa: DS0.Byte1.Bit 7
● Necessità di manutenzione cumulativa: DS0.Byte2.Bit7
I bit cumulativi vengono costituiti dall'ordinamento logico di ciascun bit singolo di tutte le funzioni di diagnostica dei canali di un sottomodulo. I tre bit cumulativi sono indipendenti fra loro e non si influenzano reciprocamente. I bit cumulativi vengono quindi impostati o ripristinati indipendentemente fra loto.
Se si verifica una variazione degli stati di manutenzione, le singole richieste o necessità di manutenzione sono ancora attive nel sottomodulo, e non ci sono guasti, viene comunicato un allarme di diagnostica in entrata, ed i bit cumulativi richiesta di manutenzione cumulativa/necessità di manutenzione cumulativa vengono portati in DS0 in modo corrispondente. Se tutti gli stati di manutenzione sono scomparsi e non è attivo alcun guasto, viene comunicato un allarme di diagnostica in uscita, ed entrambi i bit cumulativi richiesta di manutenzione cumulativa/necessità di manutenzione cumulativa vengono portati su 0. In generale vale quindi la regola che non appena almeno uno dei bit cumulativi guasto cumulativo o richiesta di manutenzione cumulativa o necessità di manutenzione cumulativa è impostato su 1, viene comunicato un allarme di diagnostica in entrata. Tuttavia, non appena nessuno dei bit cumulativi guasto cumulativo o richiesta di manutenzione cumulativa o necessità di manutenzione cumulativa è più impostato su 1, viene comunicato un allarme di diagnostica in uscita.
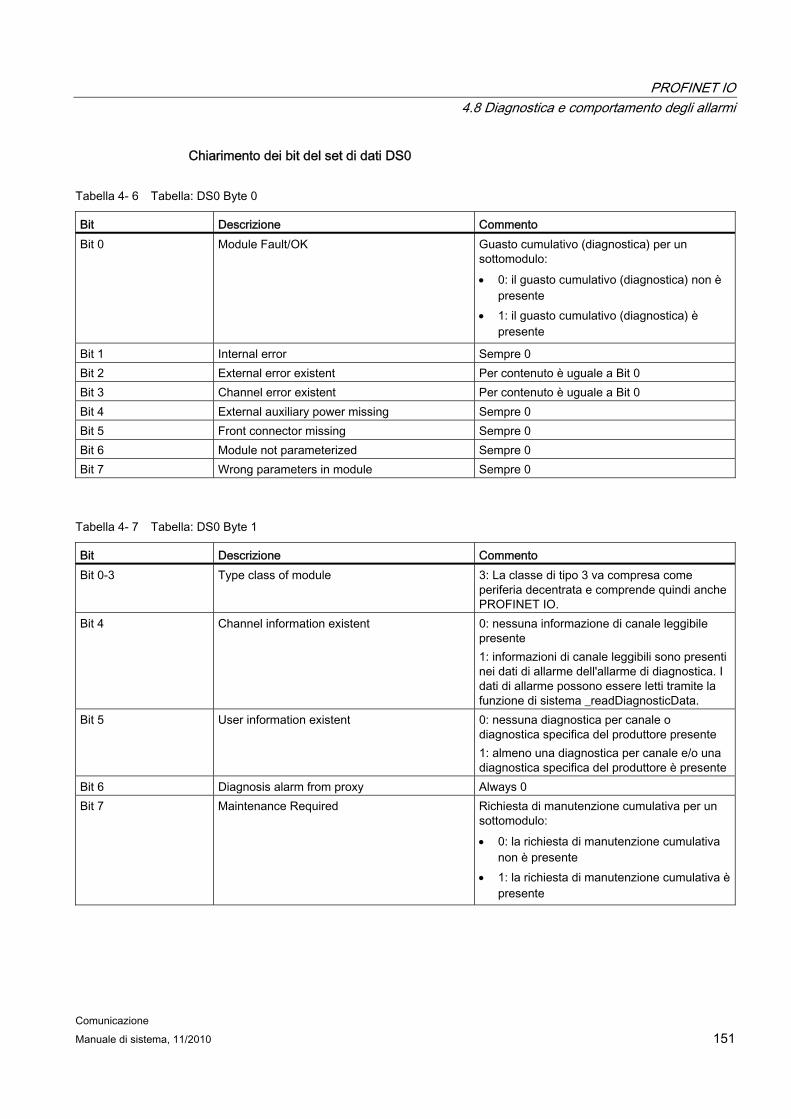
PROFINET IO 4.8 Diagnostica e comportamento degli allarmi
Comunicazione Manuale di sistema, 11/2010 151
Chiarimento dei bit del set di dati DS0
Tabella 4- 6 Tabella: DS0 Byte 0
Bit Descrizione Commento Bit 0 Module Fault/OK Guasto cumulativo (diagnostica) per un
sottomodulo: 0: il guasto cumulativo (diagnostica) non è
presente 1: il guasto cumulativo (diagnostica) è
presente
Bit 1 Internal error Sempre 0 Bit 2 External error existent Per contenuto è uguale a Bit 0 Bit 3 Channel error existent Per contenuto è uguale a Bit 0 Bit 4 External auxiliary power missing Sempre 0 Bit 5 Front connector missing Sempre 0 Bit 6 Module not parameterized Sempre 0 Bit 7 Wrong parameters in module Sempre 0
Tabella 4- 7 Tabella: DS0 Byte 1
Bit Descrizione Commento Bit 0-3 Type class of module 3: La classe di tipo 3 va compresa come
periferia decentrata e comprende quindi anche PROFINET IO.
Bit 4 Channel information existent 0: nessuna informazione di canale leggibile presente 1: informazioni di canale leggibili sono presenti nei dati di allarme dell'allarme di diagnostica. I dati di allarme possono essere letti tramite la funzione di sistema _readDiagnosticData.
Bit 5 User information existent 0: nessuna diagnostica per canale o diagnostica specifica del produttore presente 1: almeno una diagnostica per canale e/o una diagnostica specifica del produttore è presente
Bit 6 Diagnosis alarm from proxy Always 0 Bit 7 Maintenance Required Richiesta di manutenzione cumulativa per un
sottomodulo: 0: la richiesta di manutenzione cumulativa
non è presente 1: la richiesta di manutenzione cumulativa è
presente
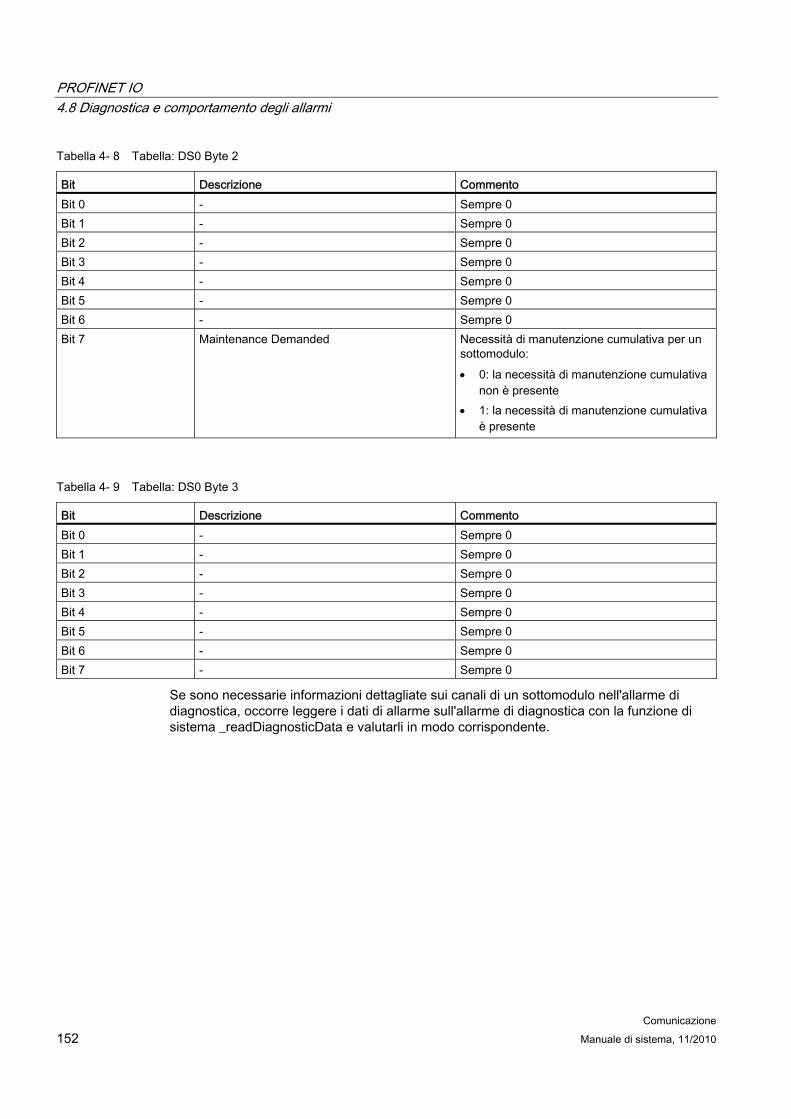
PROFINET IO 4.8 Diagnostica e comportamento degli allarmi
Comunicazione 152 Manuale di sistema, 11/2010
Tabella 4- 8 Tabella: DS0 Byte 2
Bit Descrizione Commento Bit 0 - Sempre 0 Bit 1 - Sempre 0 Bit 2 - Sempre 0 Bit 3 - Sempre 0 Bit 4 - Sempre 0 Bit 5 - Sempre 0 Bit 6 - Sempre 0 Bit 7 Maintenance Demanded Necessità di manutenzione cumulativa per un
sottomodulo: 0: la necessità di manutenzione cumulativa
non è presente 1: la necessità di manutenzione cumulativa
è presente
Tabella 4- 9 Tabella: DS0 Byte 3
Bit Descrizione Commento Bit 0 - Sempre 0 Bit 1 - Sempre 0 Bit 2 - Sempre 0 Bit 3 - Sempre 0 Bit 4 - Sempre 0 Bit 5 - Sempre 0 Bit 6 - Sempre 0 Bit 7 - Sempre 0
Se sono necessarie informazioni dettagliate sui canali di un sottomodulo nell'allarme di diagnostica, occorre leggere i dati di allarme sull'allarme di diagnostica con la funzione di sistema _readDiagnosticData e valutarli in modo corrispondente.
Comunicazione Manuale di sistema, 11/2010 153
Informazioni generali su Ethernet (collegamenti TCP e UDP) 55.1 Interfacce Ethernet
5.1.1 Panoramica Ethernet
Panoramica Di seguito viene descritto come progettare collegamenti Ethernet TCP e UDP tra partner di comunicazione. TCP e UDP si basano su Ethernet e sul protocollo IP.
5.1.2 Proprietà delle interfacce Ethernet SIMOTION
Interfacce Ethernet SIMOTION possiede, a seconda dell'apparecchio, una o due interfacce Ethernet onboard. Ai connettori RJ45 a 8 poli è possibile collegare un Industrial Ethernet con una velocità di trasmissione di 10/100 MBit/s o collegare 1000 MBit/s a D4x5-2 DP/PN.
Per le unità con 2 interfacce Ethernet non vi è alcuna funzionalità HUB/switch, ovvero i telegrammi non vengono inoltrati da un'interfaccia all'altra. Le interfacce appartengono a sottoreti Ethernet separate. Gli apparecchi SIMOTION non dispongono di alcuna funzionalità router IP, non conducono i telegrammi da una sottorete all'altra.
I parametri di timeout TCP/IP per 2 interfacce possono essere impostati in un'unica volta. Le velocità di trasmissione/Duplex è impostabile separatamente per le due interfacce. Per entrambe le interfacce vengono supportati i "Servizi tramite TCP”, inoltre è possibile effettuare un routing S7 delle interfacce Ethernet nelle interfacce Profibus. Non viene effettuato alcun routing dei "Servizi tramite TCP/IP" da un'interfaccia Ethernet all'altra.
In alternativa è possibile collegare un Industrial Ethernet anche tramite le unità PROFINET, ad es. CBE30 di un SIMOTION D4x5 (100 MBit/s).
Gli indirizzi MAC delle interfacce Ethernet sono visibili fuori dalle custodie.
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.2 Libreria di comunicazione LCom
Comunicazione 154 Manuale di sistema, 11/2010
5.1.3 Utilizzo dell'interfaccia Ethernet
Utilizzo dell'interfaccia Ethernet ● per la comunicazione con STEP 7, SIMOTION SCOUT e SIMATIC NET OPC mediante
un PG/PC
● per la comunicazione mediante UDP (User Datagram Protocol) con altri componenti, quali ad es. apparecchi SIMOTION, apparecchi SIMATIC o PC
● per la comunicazione mediante TCP (Transfer Control Protocol) con altri componenti, quali ad es. apparecchi SIMOTION, stazioni SIMATIC S7 o PC
● collegamento di apparecchi SIMATIC HMI quali ad es. MP277, MP370 o HMI PC-based
● per la comunicazione mediante SIMOTION IT DIAG e SIMOTION IT OPC XML-DA (a partire da V4.2 non è necessaria nessuna licenza)
● per la comunicazione mediante SIMOTION VM (necessaria licenza propria).
5.2 Libreria di comunicazione LCom
Libreria LCom La libreria LCom si basa su TCP, facilita l'applicazione delle funzioni di sistema SIMOTION nonché dei blocchi di comunicazione SIMATIC per realizzare una comunicazione tra più macchine.
Nota
La libreria LCom è contenuta nel DVD SIMOTION SCOUT "Documentations, Utilities&Applications". Nel DVD è contenuto un esempio di progettazione e una documentazione dettagliata in merito alla libreria.
Tipi di controllore I seguenti tipi di controllore e le seguenti combinazioni vengono supportate dalla libreria LCom:
● SIMOTION ↔ SIMOTION
● SIMATIC ↔ SIMATIC
● SIMOTION ↔ SIMATIC
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione Manuale di sistema, 11/2010 155
Funzioni ● I dati di trasmissione e ricezione devono essere di tipo BYTE. All'esterno di
FBLComMachineCom è possibile convertire qualsiasi struttura utente via Marshalling in ARRAY OF BYTE.
● Funzionamento bidirezionale
– Viene creato un collegamento logico punto-punto tra due controllori.
– Ogni controllore può contemporaneamente trasmettere e ricevere mediante un collegamento.
● Uniformazione configurazione dei partner di comunicazione (ad es. clock di invio)
– Assegnazione dei parametri di comunicazione ai partner di comunicazione
– Modifica della configurazione durante il funzionamento
● Tipi di trasmissione dati
– Trasmissione ciclica (trasmissione a distanza temporale fissa)
– Invio modifica dati
– Invio singolo
● Invio e ricezione di max. 64 kB dati utili.
● Tacitazione dei dati ricevuti e del loro monitoraggio
● Il numero dei telegrammi, che possono essere trasmessi in maniera non tacitata, può variare (u8SlidingWindow impostabile). Il blocco LCom per il controllore SIMATIC supporta solo u8SlidingWindow = 1.
● Monitoraggio segno vitale
● Sincronizzazione oraria
5.3 Comunicazione TCP
5.3.1 Panoramica comunicazione TCP
Comunicazione con TCP (Transfer Control Protocol) La comunicazione tramite TCP è orientata al collegamento, cioè i dati possono essere trasferiti solo dopo la creazione di un collegamento al partner di comunicazione.
Un collegamento di comunicazione è caratterizzato da due punti finali. Il punto finale è una coppia ordinata costituita da indirizzo IP e porta. La porta nel client può essere diversa dalla porta nel server. In generale un punto finale rappresenta un server e l'altro punto finale un client. Per la creazione del collegamento TCP devono esistere almeno un client e un server.
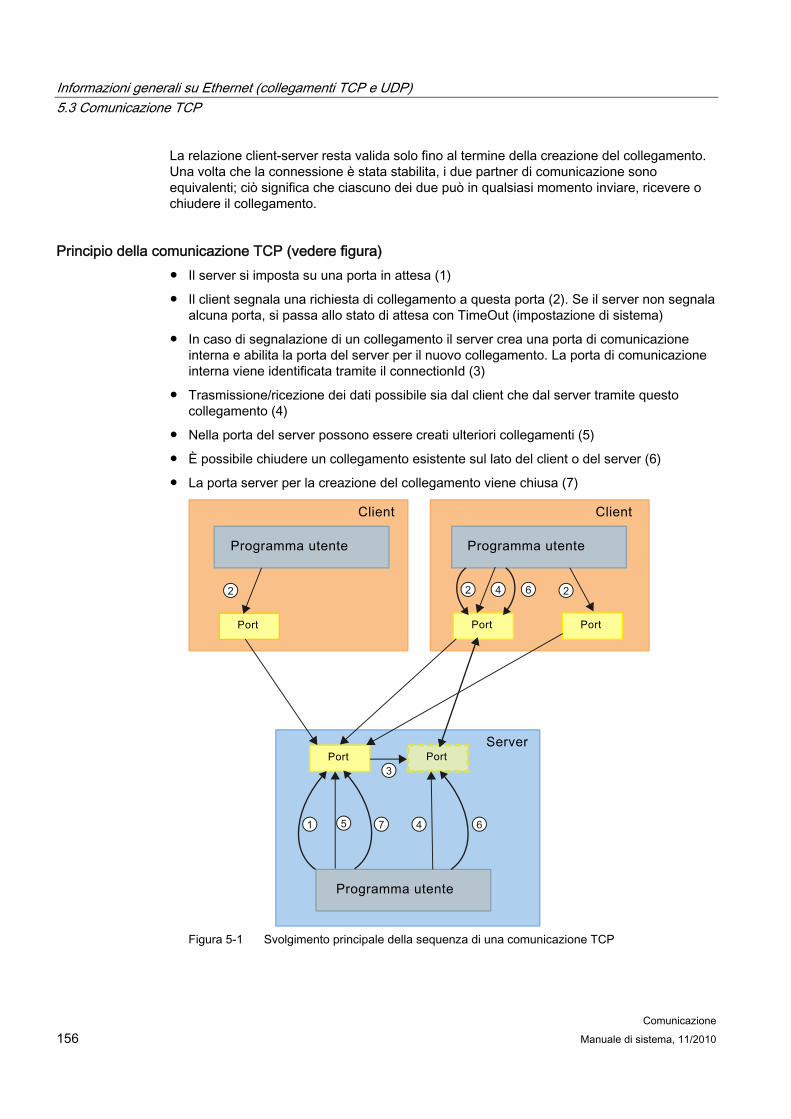
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione 156 Manuale di sistema, 11/2010
La relazione client-server resta valida solo fino al termine della creazione del collegamento. Una volta che la connessione è stata stabilita, i due partner di comunicazione sono equivalenti; ciò significa che ciascuno dei due può in qualsiasi momento inviare, ricevere o chiudere il collegamento.
Principio della comunicazione TCP (vedere figura) ● Il server si imposta su una porta in attesa (1)
● Il client segnala una richiesta di collegamento a questa porta (2). Se il server non segnala alcuna porta, si passa allo stato di attesa con TimeOut (impostazione di sistema)
● In caso di segnalazione di un collegamento il server crea una porta di comunicazione interna e abilita la porta del server per il nuovo collegamento. La porta di comunicazione interna viene identificata tramite il connectionId (3)
● Trasmissione/ricezione dei dati possibile sia dal client che dal server tramite questo collegamento (4)
● Nella porta del server possono essere creati ulteriori collegamenti (5)
● È possibile chiudere un collegamento esistente sul lato del client o del server (6)
● La porta server per la creazione del collegamento viene chiusa (7)
Figura 5-1 Svolgimento principale della sequenza di una comunicazione TCP
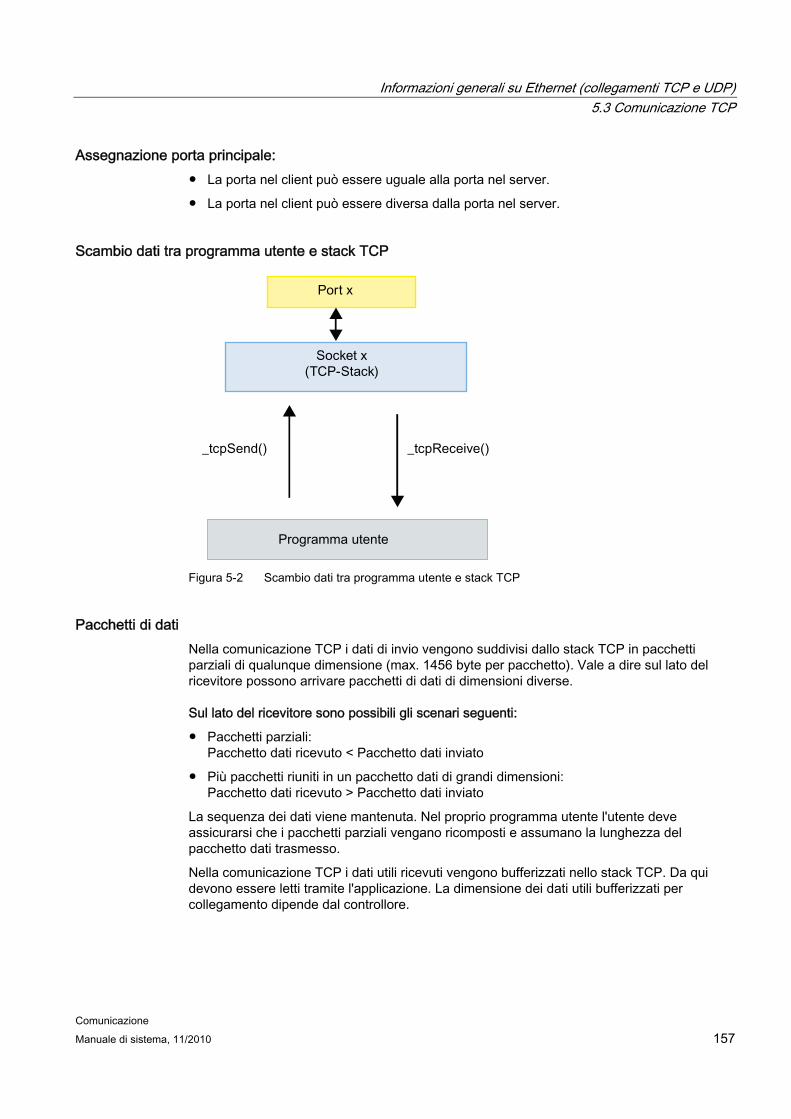
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione Manuale di sistema, 11/2010 157
Assegnazione porta principale: ● La porta nel client può essere uguale alla porta nel server.
● La porta nel client può essere diversa dalla porta nel server.
Scambio dati tra programma utente e stack TCP
Figura 5-2 Scambio dati tra programma utente e stack TCP
Pacchetti di dati Nella comunicazione TCP i dati di invio vengono suddivisi dallo stack TCP in pacchetti parziali di qualunque dimensione (max. 1456 byte per pacchetto). Vale a dire sul lato del ricevitore possono arrivare pacchetti di dati di dimensioni diverse.
Sul lato del ricevitore sono possibili gli scenari seguenti:
● Pacchetti parziali: Pacchetto dati ricevuto < Pacchetto dati inviato
● Più pacchetti riuniti in un pacchetto dati di grandi dimensioni: Pacchetto dati ricevuto > Pacchetto dati inviato
La sequenza dei dati viene mantenuta. Nel proprio programma utente l'utente deve assicurarsi che i pacchetti parziali vengano ricomposti e assumano la lunghezza del pacchetto dati trasmesso.
Nella comunicazione TCP i dati utili ricevuti vengono bufferizzati nello stack TCP. Da qui devono essere letti tramite l'applicazione. La dimensione dei dati utili bufferizzati per collegamento dipende dal controllore.
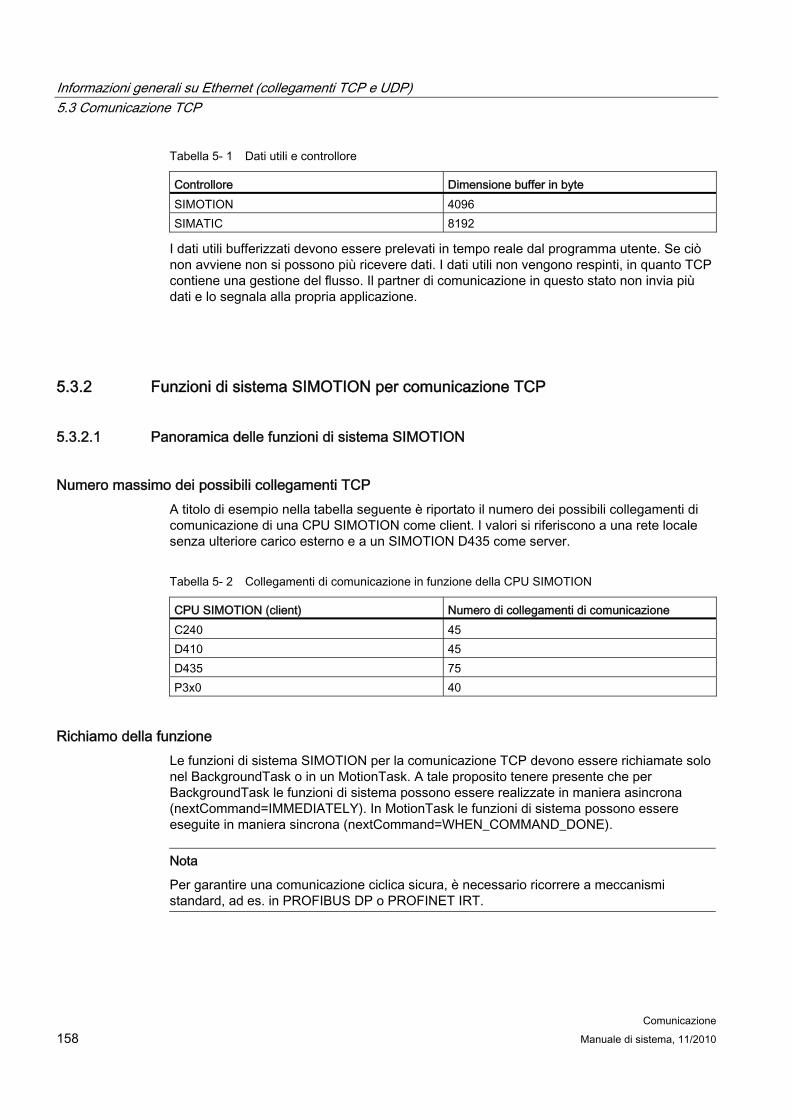
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione 158 Manuale di sistema, 11/2010
Tabella 5- 1 Dati utili e controllore
Controllore Dimensione buffer in byte SIMOTION 4096 SIMATIC 8192
I dati utili bufferizzati devono essere prelevati in tempo reale dal programma utente. Se ciò non avviene non si possono più ricevere dati. I dati utili non vengono respinti, in quanto TCP contiene una gestione del flusso. Il partner di comunicazione in questo stato non invia più dati e lo segnala alla propria applicazione.
5.3.2 Funzioni di sistema SIMOTION per comunicazione TCP
5.3.2.1 Panoramica delle funzioni di sistema SIMOTION
Numero massimo dei possibili collegamenti TCP A titolo di esempio nella tabella seguente è riportato il numero dei possibili collegamenti di comunicazione di una CPU SIMOTION come client. I valori si riferiscono a una rete locale senza ulteriore carico esterno e a un SIMOTION D435 come server.
Tabella 5- 2 Collegamenti di comunicazione in funzione della CPU SIMOTION
CPU SIMOTION (client) Numero di collegamenti di comunicazione C240 45 D410 45 D435 75 P3x0 40
Richiamo della funzione Le funzioni di sistema SIMOTION per la comunicazione TCP devono essere richiamate solo nel BackgroundTask o in un MotionTask. A tale proposito tenere presente che per BackgroundTask le funzioni di sistema possono essere realizzate in maniera asincrona (nextCommand=IMMEDIATELY). In MotionTask le funzioni di sistema possono essere eseguite in maniera sincrona (nextCommand=WHEN_COMMAND_DONE).
Nota
Per garantire una comunicazione ciclica sicura, è necessario ricorrere a meccanismi standard, ad es. in PROFIBUS DP o PROFINET IRT.
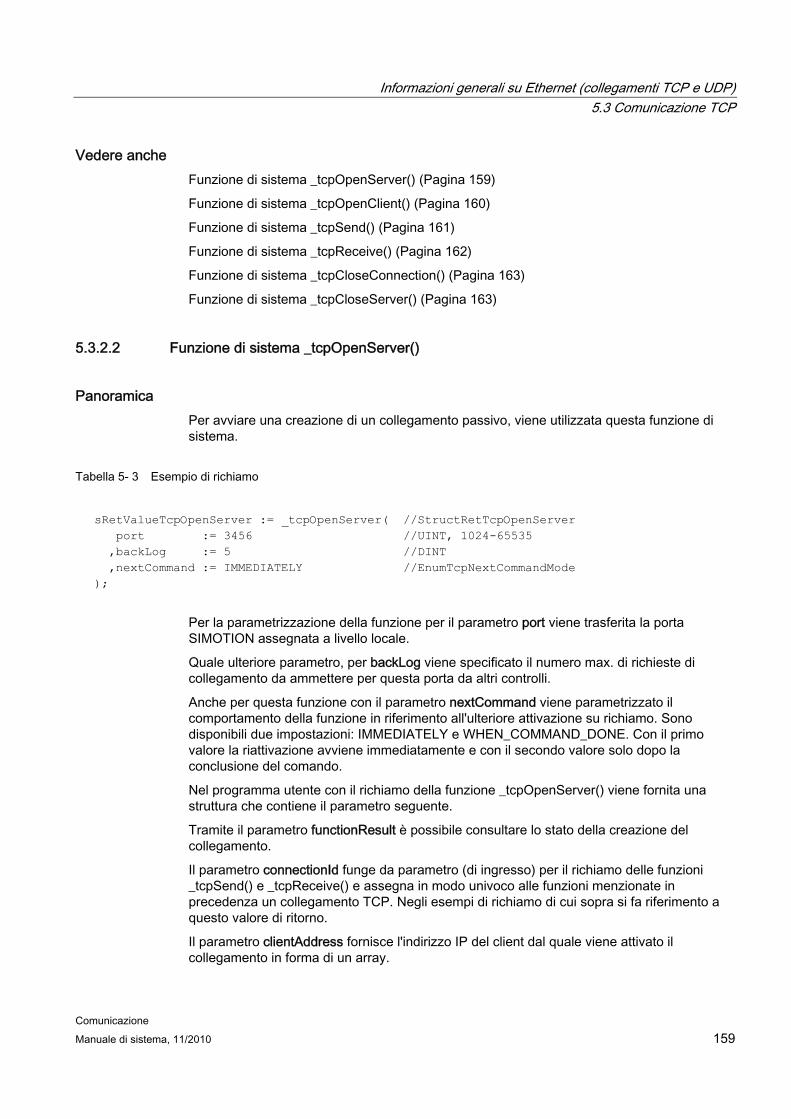
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione Manuale di sistema, 11/2010 159
Vedere anche Funzione di sistema _tcpOpenServer() (Pagina 159)
Funzione di sistema _tcpOpenClient() (Pagina 160)
Funzione di sistema _tcpSend() (Pagina 161)
Funzione di sistema _tcpReceive() (Pagina 162)
Funzione di sistema _tcpCloseConnection() (Pagina 163)
Funzione di sistema _tcpCloseServer() (Pagina 163)
5.3.2.2 Funzione di sistema _tcpOpenServer()
Panoramica Per avviare una creazione di un collegamento passivo, viene utilizzata questa funzione di sistema.
Tabella 5- 3 Esempio di richiamo
sRetValueTcpOpenServer := _tcpOpenServer( //StructRetTcpOpenServer port := 3456 //UINT, 1024-65535 ,backLog := 5 //DINT ,nextCommand := IMMEDIATELY //EnumTcpNextCommandMode );
Per la parametrizzazione della funzione per il parametro port viene trasferita la porta SIMOTION assegnata a livello locale.
Quale ulteriore parametro, per backLog viene specificato il numero max. di richieste di collegamento da ammettere per questa porta da altri controlli.
Anche per questa funzione con il parametro nextCommand viene parametrizzato il comportamento della funzione in riferimento all'ulteriore attivazione su richiamo. Sono disponibili due impostazioni: IMMEDIATELY e WHEN_COMMAND_DONE. Con il primo valore la riattivazione avviene immediatamente e con il secondo valore solo dopo la conclusione del comando.
Nel programma utente con il richiamo della funzione _tcpOpenServer() viene fornita una struttura che contiene il parametro seguente.
Tramite il parametro functionResult è possibile consultare lo stato della creazione del collegamento.
Il parametro connectionId funge da parametro (di ingresso) per il richiamo delle funzioni _tcpSend() e _tcpReceive() e assegna in modo univoco alle funzioni menzionate in precedenza un collegamento TCP. Negli esempi di richiamo di cui sopra si fa riferimento a questo valore di ritorno.
Il parametro clientAddress fornisce l'indirizzo IP del client dal quale viene attivato il collegamento in forma di un array.
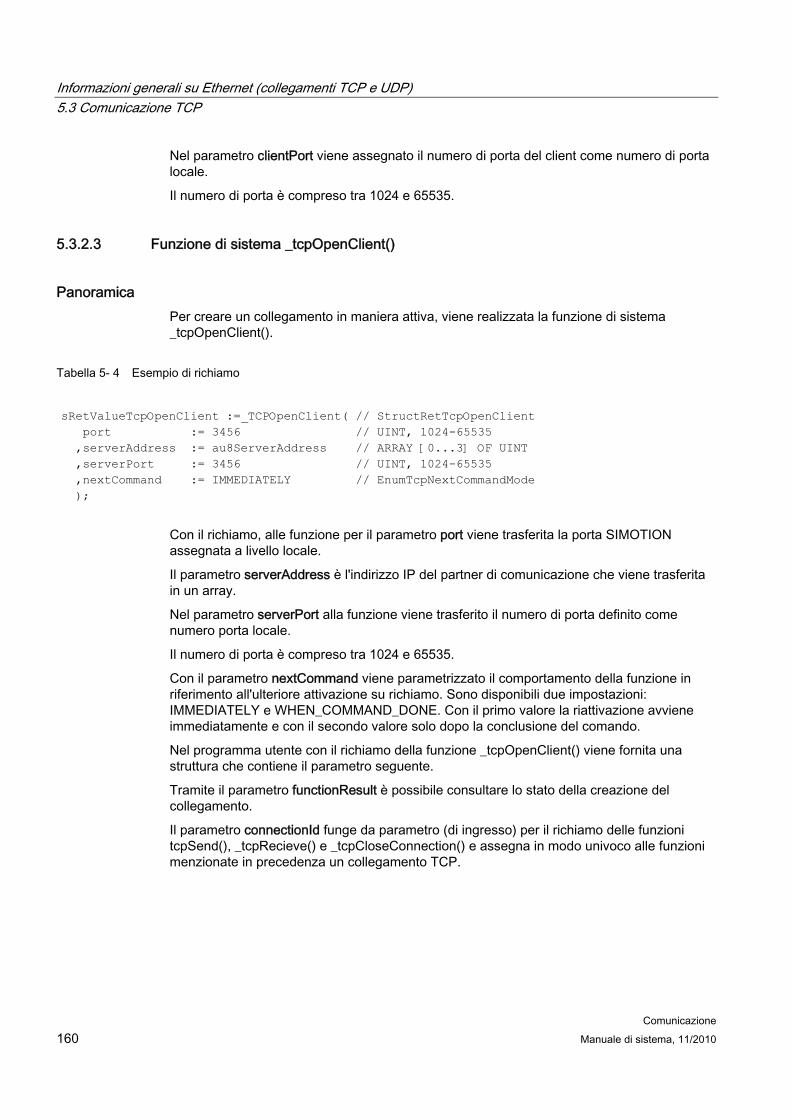
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione 160 Manuale di sistema, 11/2010
Nel parametro clientPort viene assegnato il numero di porta del client come numero di porta locale.
Il numero di porta è compreso tra 1024 e 65535.
5.3.2.3 Funzione di sistema _tcpOpenClient()
Panoramica Per creare un collegamento in maniera attiva, viene realizzata la funzione di sistema _tcpOpenClient().
Tabella 5- 4 Esempio di richiamo
sRetValueTcpOpenClient :=_TCPOpenClient( // StructRetTcpOpenClient port := 3456 // UINT, 1024-65535 ,serverAddress := au8ServerAddress // ARRAY [0...3] OF UINT ,serverPort := 3456 // UINT, 1024-65535 ,nextCommand := IMMEDIATELY // EnumTcpNextCommandMode );
Con il richiamo, alle funzione per il parametro port viene trasferita la porta SIMOTION assegnata a livello locale.
Il parametro serverAddress è l'indirizzo IP del partner di comunicazione che viene trasferita in un array.
Nel parametro serverPort alla funzione viene trasferito il numero di porta definito come numero porta locale.
Il numero di porta è compreso tra 1024 e 65535.
Con il parametro nextCommand viene parametrizzato il comportamento della funzione in riferimento all'ulteriore attivazione su richiamo. Sono disponibili due impostazioni: IMMEDIATELY e WHEN_COMMAND_DONE. Con il primo valore la riattivazione avviene immediatamente e con il secondo valore solo dopo la conclusione del comando.
Nel programma utente con il richiamo della funzione _tcpOpenClient() viene fornita una struttura che contiene il parametro seguente.
Tramite il parametro functionResult è possibile consultare lo stato della creazione del collegamento.
Il parametro connectionId funge da parametro (di ingresso) per il richiamo delle funzioni tcpSend(), _tcpRecieve() e _tcpCloseConnection() e assegna in modo univoco alle funzioni menzionate in precedenza un collegamento TCP.
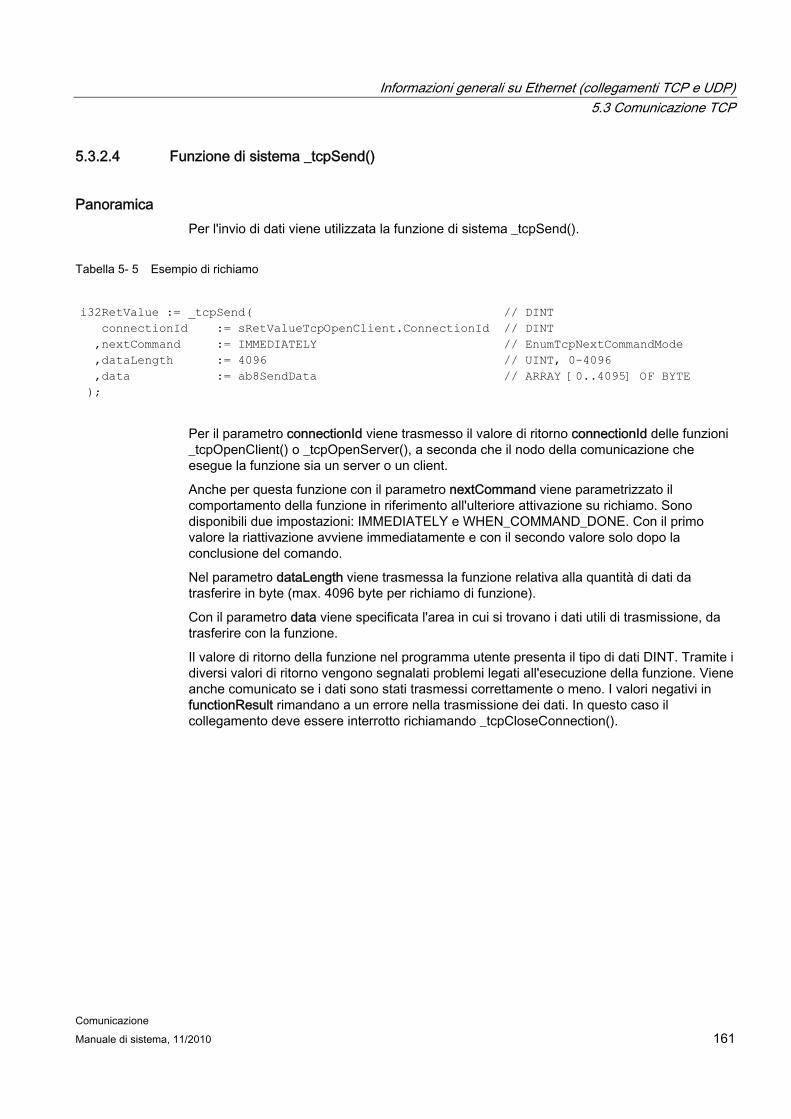
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione Manuale di sistema, 11/2010 161
5.3.2.4 Funzione di sistema _tcpSend()
Panoramica Per l'invio di dati viene utilizzata la funzione di sistema _tcpSend().
Tabella 5- 5 Esempio di richiamo
i32RetValue := _tcpSend( // DINT connectionId := sRetValueTcpOpenClient.ConnectionId // DINT ,nextCommand := IMMEDIATELY // EnumTcpNextCommandMode ,dataLength := 4096 // UINT, 0-4096 ,data := ab8SendData // ARRAY [0..4095] OF BYTE );
Per il parametro connectionId viene trasmesso il valore di ritorno connectionId delle funzioni _tcpOpenClient() o _tcpOpenServer(), a seconda che il nodo della comunicazione che esegue la funzione sia un server o un client.
Anche per questa funzione con il parametro nextCommand viene parametrizzato il comportamento della funzione in riferimento all'ulteriore attivazione su richiamo. Sono disponibili due impostazioni: IMMEDIATELY e WHEN_COMMAND_DONE. Con il primo valore la riattivazione avviene immediatamente e con il secondo valore solo dopo la conclusione del comando.
Nel parametro dataLength viene trasmessa la funzione relativa alla quantità di dati da trasferire in byte (max. 4096 byte per richiamo di funzione).
Con il parametro data viene specificata l'area in cui si trovano i dati utili di trasmissione, da trasferire con la funzione.
Il valore di ritorno della funzione nel programma utente presenta il tipo di dati DINT. Tramite i diversi valori di ritorno vengono segnalati problemi legati all'esecuzione della funzione. Viene anche comunicato se i dati sono stati trasmessi correttamente o meno. I valori negativi in functionResult rimandano a un errore nella trasmissione dei dati. In questo caso il collegamento deve essere interrotto richiamando _tcpCloseConnection().
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione 162 Manuale di sistema, 11/2010
5.3.2.5 Funzione di sistema _tcpReceive()
Panoramica Per ricevere dati, viene utilizzata la funzione di sistema _tcpReceive().
Tabella 5- 6 Esempio di richiamo
sRetValueTcpReceive := _tcpReceive( // StructRetTcpReceive connectionId := sRetValueTcpOpenClient.connectionId // DINT ,nextCommand := IMMEDIATELY // EnumNextCommandMode ,receiveVariable := ab8ReceiveData // ARRAY [0..4095] OF BYTE );
Per il parametro connectionId viene trasmesso il valore di ritorno connectionId delle funzioni _tcpOpenClient() o _tcpOpenServer(), a seconda che il nodo della comunicazione che esegue la funzione sia un server o un client.
Anche per _tcpReceive() con il parametro nextcommand viene parametrizzato nextCommand il comportamento della funzione in riferimento all'ulteriore attivazione su richiamo. Sono disponibili due impostazioni: IMMEDIATELY e WHEN_COMMAND_DONE. Con il primo valore la riattivazione avviene immediatamente oppure con il secondo valore solo dopo la conclusione del comando.
Per richiamo di funzione possono essere letti dati di ricezione fino a 4096 byte dallo stack TCP. A tale proposito occorre tenere presente che i pacchetti ricevuti non siano presenti in dimensione non prevedibile. Sul lato del ricevitore è necessario assicurarsi che tutti i dati utili siano presenti prima della valutazione e dell'ulteriore elaborazione. A questo proposito occorre impostare il parametro nextCommand su IMMEDIATELY.
Con il parametro receiveVariable viene comunicato alla funzione in quale area di dati utili devono essere salvati i dati di ricezione. I dati ricevuti sono disponibili nel parametro receiveVariable nella lunghezza dataLength , se in functionresult il valore di ritorno è = 16#0. ReceiveVariable viene sovrascritto al successivo richiamo della funzione con nuovi dati nella lunghezza dataLength .
Nel programma utente con il richiamo della funzione _tcpReceive() viene fornita una struttura che contiene il parametro seguente. Tramite il parametro functionResult è possibile consultare lo stato dei dati ricevuti. Il parametro dataLength comunica il numero di byte dei dati utili ricevuti dopo l'avvenuto richiamo della funzione _tcpReceive().
I valori negativi in functionResult rimandano a un errore nella trasmissione dei dati. In questo caso il collegamento deve essere interrotto richiamando _tcpCloseConnection().
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione Manuale di sistema, 11/2010 163
5.3.2.6 Funzione di sistema _tcpCloseConnection()
Panoramica Per chiudere un collegamento che è stato creato da un partner di comunicazione (client) in maniera attiva, che esegue la funzione, viene utilizzata la funzione_tcpCloseConnection().
Tabella 5- 7 Esempio di richiamo
sRetValueTcpCloseConnection := _tcpCloseConnection( // DINT connectionId := sRetValueTcpOpenClient.ConnectionId // DINT );
Il valore di ritorno della funzione _tcpOpenClient() viene restituito al parametro connectionId , per stabilire in modo univoco quale collegamento deve essere eliminato.
Il valore di ritorno della funzione nel programma utente presenta il tipo di dati DINT e rimanda a problemi nell'esecuzione della funzione o segnala se il collegamento è stato effettivamente eliminato.
5.3.2.7 Funzione di sistema _tcpCloseServer()
Panoramica Per chiudere un collegamento che è stato creato da un partner di comunicazione (server) in maniera passiva, che esegue la funzione, viene utilizzata la funzione_tcpCloseServer().
Tabella 5- 8 Esempio di richiamo
sRetValueTcpCloseServer := _tcpCloseServer(port := 3456); //1024 - 65535
La porta del server viene trasmessa al parametro port .
Il valore di ritorno della funzione nel programma utente presenta il tipo di dati DINT e rimanda a errori nella parametrizzazione della funzione o segnala se il collegamento della porta è stato effettivamente chiuso.
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione 164 Manuale di sistema, 11/2010
5.3.3 Blocchi di comunicazione SIMATIC interfaccia Ethernet onboard
5.3.3.1 Panoramica blocchi di comunicazione SIMATIC
Panoramica Per la comunicazione TCP con SIMATIC e le relative interfacce Ethernet onboard sono disponibili i seguenti blocchi funzionali.
● TSEND (FB63)
● TRCV (FB64)
● TCON (FB65)
● TDISCON (FB66)
Per creare il collegamento FB65 TCON necessita la struttura dati UDT65 TCON_PAR. Come valore di ritorno la struttura dati riceve un collegamento ID che viene trasmesso al richiamo dei blocchi di comunicazione. Per eliminare il collegamento si utilizza il blocco funzionale FB66 TDISCON. La trasmissione e la ricezione dei dati avvengono tramite i blocchi FB63 TSEND e FB64 TRCV.
Numero massimo dei collegamenti
Tabella 5- 9 Tipi di controllore e numero max. di collegamenti
SIMATIC CPU 315(F)-2 PN/DP 8 CPU 317(F)-2 PN/DP 8 CPU 319(F)-2 PN/DP 32 CPU 414-3 PN/DP 30 CPU 416(F)-3 PN/DP 62 IM151-8(F) PN/DP CPU 8
Vedere anche Panoramica blocchi di comunicazione SIMATIC (Pagina 182)
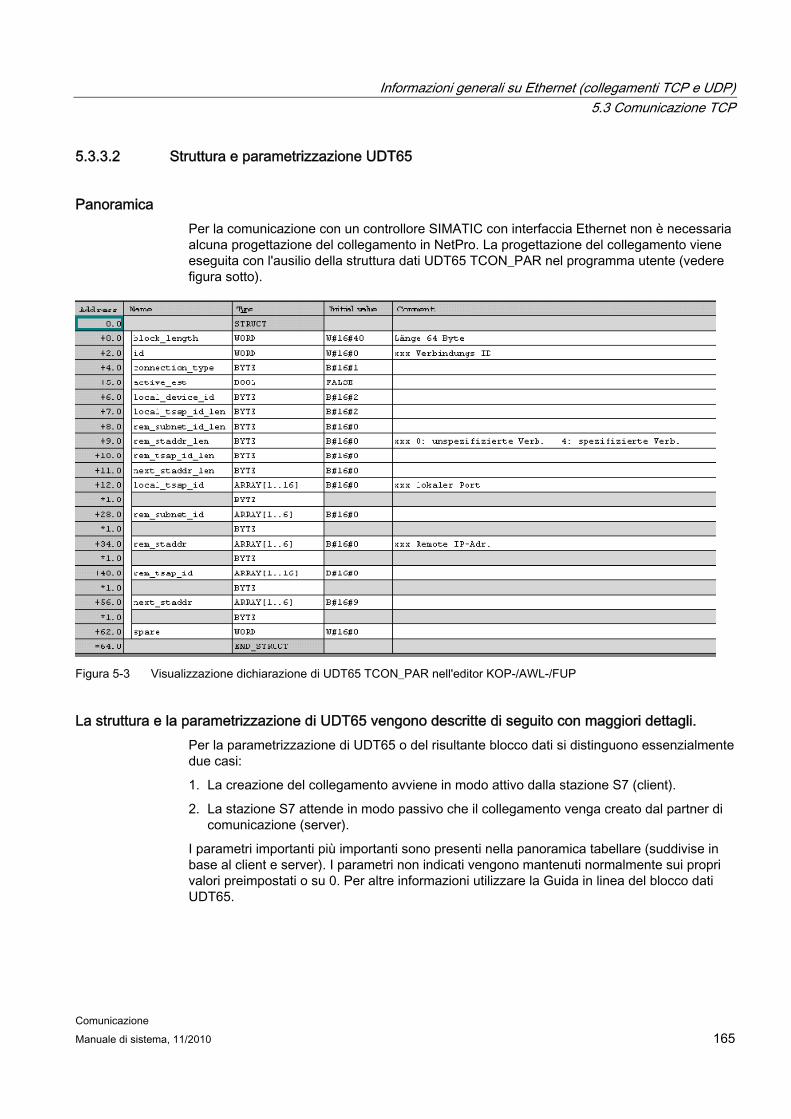
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione Manuale di sistema, 11/2010 165
5.3.3.2 Struttura e parametrizzazione UDT65
Panoramica Per la comunicazione con un controllore SIMATIC con interfaccia Ethernet non è necessaria alcuna progettazione del collegamento in NetPro. La progettazione del collegamento viene eseguita con l'ausilio della struttura dati UDT65 TCON_PAR nel programma utente (vedere figura sotto).
Figura 5-3 Visualizzazione dichiarazione di UDT65 TCON_PAR nell'editor KOP-/AWL-/FUP
La struttura e la parametrizzazione di UDT65 vengono descritte di seguito con maggiori dettagli. Per la parametrizzazione di UDT65 o del risultante blocco dati si distinguono essenzialmente due casi:
1. La creazione del collegamento avviene in modo attivo dalla stazione S7 (client).
2. La stazione S7 attende in modo passivo che il collegamento venga creato dal partner di comunicazione (server).
I parametri importanti più importanti sono presenti nella panoramica tabellare (suddivise in base al client e server). I parametri non indicati vengono mantenuti normalmente sui propri valori preimpostati o su 0. Per altre informazioni utilizzare la Guida in linea del blocco dati UDT65.
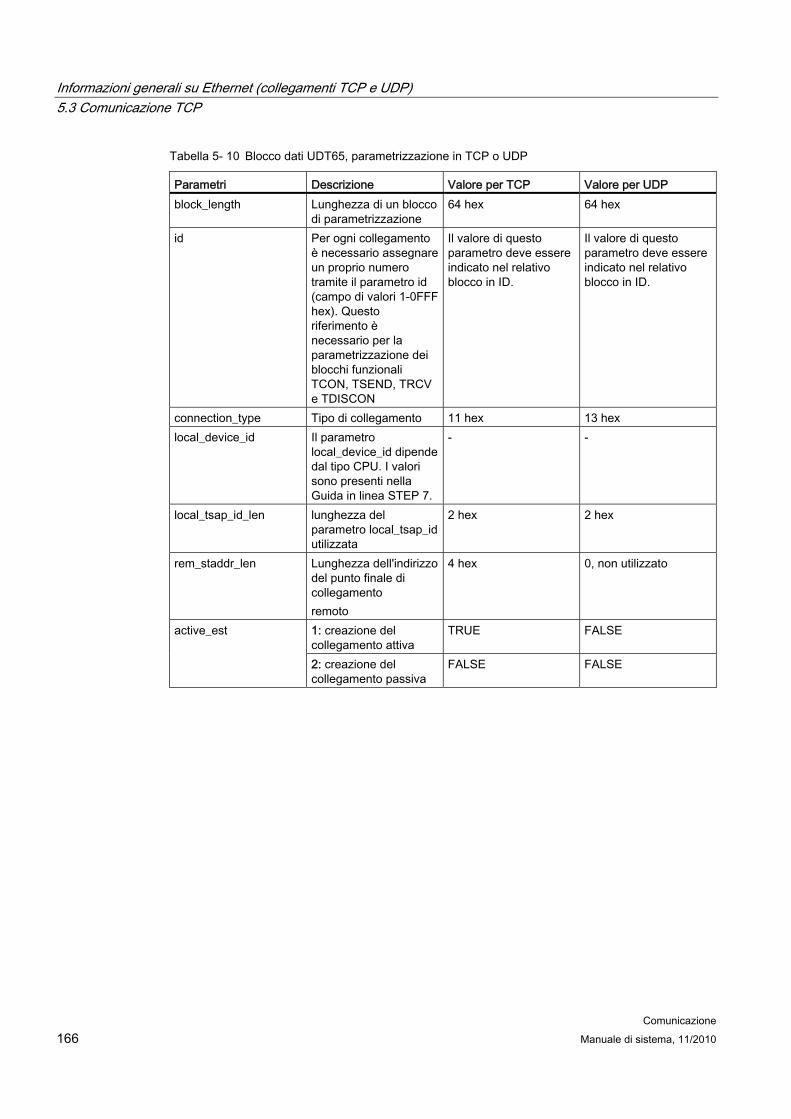
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione 166 Manuale di sistema, 11/2010
Tabella 5- 10 Blocco dati UDT65, parametrizzazione in TCP o UDP
Parametri Descrizione Valore per TCP Valore per UDP block_length Lunghezza di un blocco
di parametrizzazione 64 hex 64 hex
id Per ogni collegamento è necessario assegnare un proprio numero tramite il parametro id (campo di valori 1-0FFF hex). Questo riferimento è necessario per la parametrizzazione dei blocchi funzionali TCON, TSEND, TRCV e TDISCON
Il valore di questo parametro deve essere indicato nel relativo blocco in ID.
Il valore di questo parametro deve essere indicato nel relativo blocco in ID.
connection_type Tipo di collegamento 11 hex 13 hex local_device_id Il parametro
local_device_id dipende dal tipo CPU. I valori sono presenti nella Guida in linea STEP 7.
- -
local_tsap_id_len lunghezza del parametro local_tsap_id utilizzata
2 hex 2 hex
rem_staddr_len Lunghezza dell'indirizzo del punto finale di collegamento remoto
4 hex 0, non utilizzato
1: creazione del collegamento attiva
TRUE FALSE active_est
2: creazione del collegamento passiva
FALSE FALSE
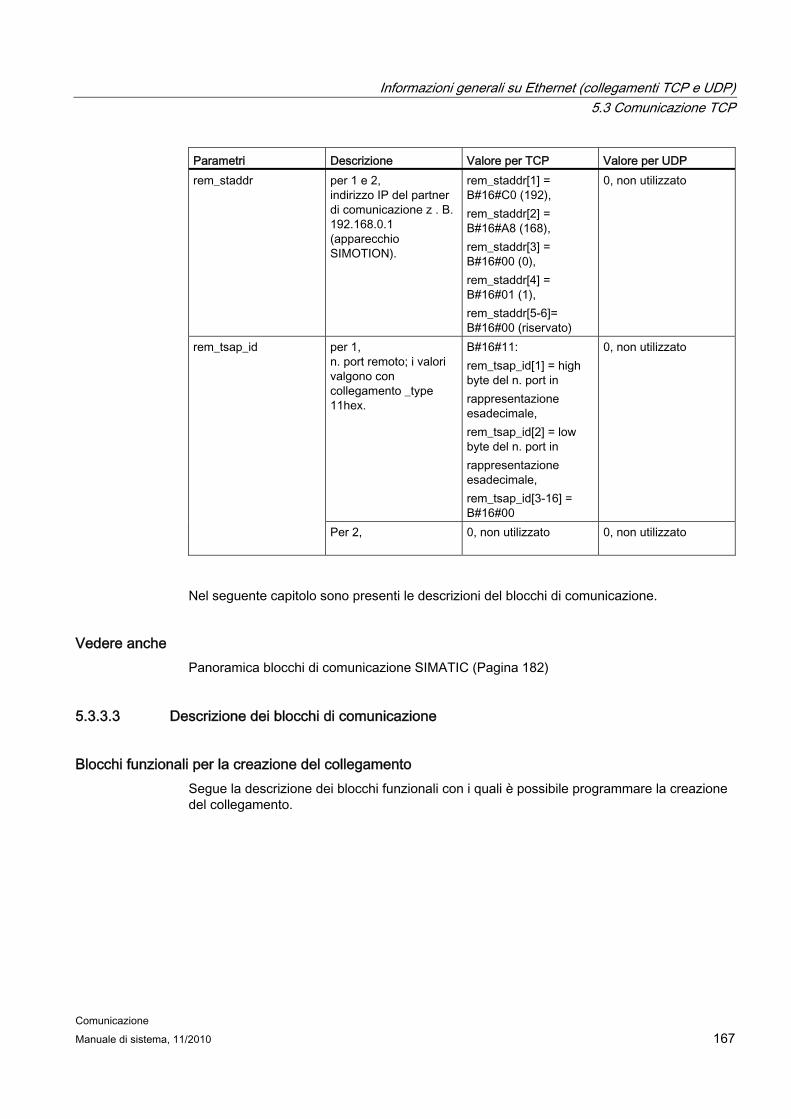
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione Manuale di sistema, 11/2010 167
Parametri Descrizione Valore per TCP Valore per UDP rem_staddr per 1 e 2,
indirizzo IP del partner di comunicazione z . B. 192.168.0.1 (apparecchio SIMOTION).
rem_staddr[1] = B#16#C0 (192), rem_staddr[2] = B#16#A8 (168), rem_staddr[3] = B#16#00 (0), rem_staddr[4] = B#16#01 (1), rem_staddr[5-6]= B#16#00 (riservato)
0, non utilizzato
per 1, n. port remoto; i valori valgono con collegamento _type 11hex.
B#16#11: rem_tsap_id[1] = high byte del n. port in rappresentazione esadecimale, rem_tsap_id[2] = low byte del n. port in rappresentazione esadecimale, rem_tsap_id[3-16] = B#16#00
0, non utilizzato rem_tsap_id
Per 2,
0, non utilizzato 0, non utilizzato
Nel seguente capitolo sono presenti le descrizioni del blocchi di comunicazione.
Vedere anche Panoramica blocchi di comunicazione SIMATIC (Pagina 182)
5.3.3.3 Descrizione dei blocchi di comunicazione
Blocchi funzionali per la creazione del collegamento Segue la descrizione dei blocchi funzionali con i quali è possibile programmare la creazione del collegamento.

Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione 168 Manuale di sistema, 11/2010
TCON (FB65)
Tabella 5- 11 Esempio di richiamo
CALL "TCON" , DB66 REQ :=M1.0 ID :=W#16#1 DONE :=M2.0 BUSY :=M3.0 ERROR :=M4.0 STATUS :=MW100 CONNECT :=P#DB1.DBX0.0 BYTE 64
Se i dati vengono ricevuti o inviati su una stazione S7 con interfaccia Ethernet integrata, per prima cosa occorre creare tramite il blocco funzionale TCON (FB65) un collegamento tra la stazione S7 e il partner di comunicazione.
Tramite il parametro REQ viene comandata la creazione del collegamento. Se il parametro viene impostato sul valore 1 e in questo modo viene creato un fronte, i dati (descrizione del collegamento) dell'area indicata sotto CONNECT vengono trasferiti al blocco funzionale per creare il collegamento._-..-òòà
Tramite il parametro ID viene creato un riferimento al collegamento che si desidera stabilire.
Tramite i parametri DONE, BUSY e ERROR è possibile consultare lo stato dell'elaborazione del blocco funzionale. Oltre all'informazione relativa alla comparsa di un errore (ERROR = 1) l'utente tramite il parametro STATUS riceve anche informazioni dettagliate sul tipo di errore.
Come già accennato in precedenza, il parametro CONNECT contiene gli indirizzi e la lunghezza della descrizione del collegamento. L'indirizzo rimanda a un'area del blocco dati, la cui struttura corrisponde a UDT65.
TSEND (FB63)
Tabella 5- 12 Esempio di richiamo
Call "TSEND" , DB63 REQ :=M5.0 ID :=W#16#1 LEN :=10 DONE :=M6.0 BUSY :=M7.0 ERROR :=M8.0 STATUS :=MW200 DATA :=DB10.DBBO
Se è stato creato una collegamento di comunicazione, è possibile inviare questi dati. Ciò avviene richiamando il blocco funzionale TSEND (FB63).
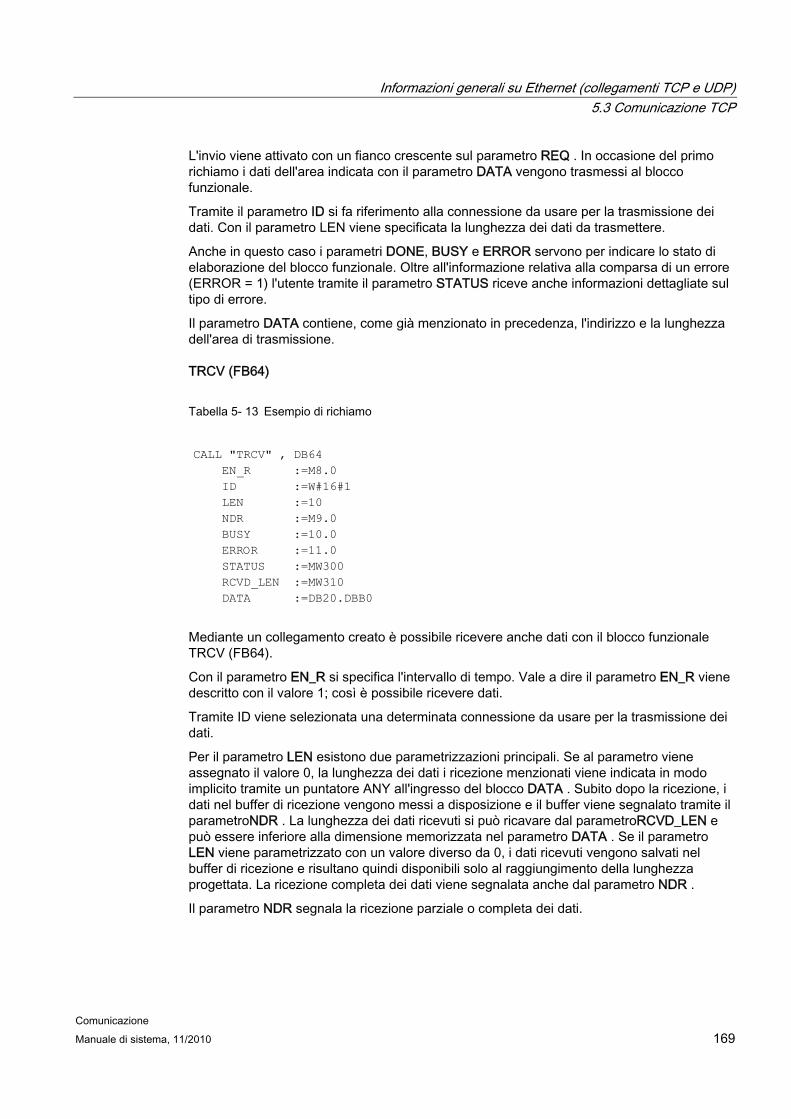
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione Manuale di sistema, 11/2010 169
L'invio viene attivato con un fianco crescente sul parametro REQ . In occasione del primo richiamo i dati dell'area indicata con il parametro DATA vengono trasmessi al blocco funzionale.
Tramite il parametro ID si fa riferimento alla connessione da usare per la trasmissione dei dati. Con il parametro LEN viene specificata la lunghezza dei dati da trasmettere.
Anche in questo caso i parametri DONE, BUSY e ERROR servono per indicare lo stato di elaborazione del blocco funzionale. Oltre all'informazione relativa alla comparsa di un errore (ERROR = 1) l'utente tramite il parametro STATUS riceve anche informazioni dettagliate sul tipo di errore.
Il parametro DATA contiene, come già menzionato in precedenza, l'indirizzo e la lunghezza dell'area di trasmissione.
TRCV (FB64)
Tabella 5- 13 Esempio di richiamo
CALL "TRCV" , DB64 EN_R :=M8.0 ID :=W#16#1 LEN :=10 NDR :=M9.0 BUSY :=10.0 ERROR :=11.0 STATUS :=MW300 RCVD_LEN :=MW310 DATA :=DB20.DBB0
Mediante un collegamento creato è possibile ricevere anche dati con il blocco funzionale TRCV (FB64).
Con il parametro EN_R si specifica l'intervallo di tempo. Vale a dire il parametro EN_R viene descritto con il valore 1; così è possibile ricevere dati.
Tramite ID viene selezionata una determinata connessione da usare per la trasmissione dei dati.
Per il parametro LEN esistono due parametrizzazioni principali. Se al parametro viene assegnato il valore 0, la lunghezza dei dati i ricezione menzionati viene indicata in modo implicito tramite un puntatore ANY all'ingresso del blocco DATA . Subito dopo la ricezione, i dati nel buffer di ricezione vengono messi a disposizione e il buffer viene segnalato tramite il parametroNDR . La lunghezza dei dati ricevuti si può ricavare dal parametroRCVD_LEN e può essere inferiore alla dimensione memorizzata nel parametro DATA . Se il parametro LEN viene parametrizzato con un valore diverso da 0, i dati ricevuti vengono salvati nel buffer di ricezione e risultano quindi disponibili solo al raggiungimento della lunghezza progettata. La ricezione completa dei dati viene segnalata anche dal parametro NDR .
Il parametro NDR segnala la ricezione parziale o completa dei dati.
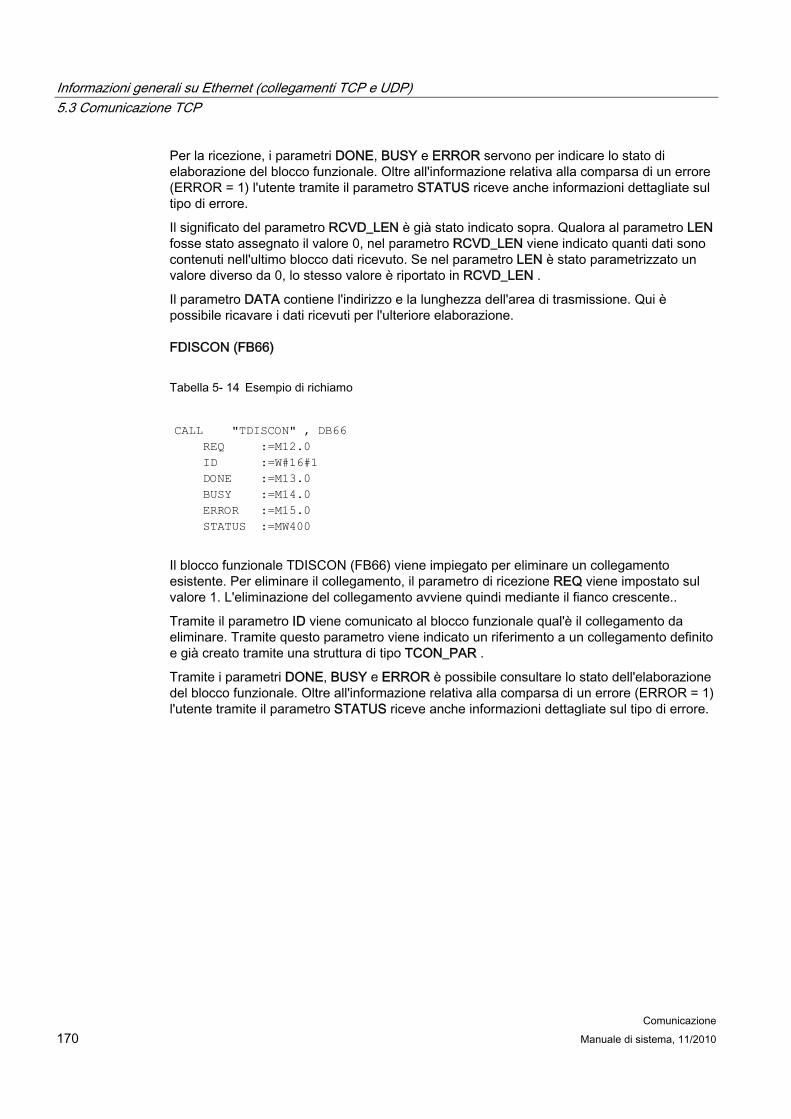
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione 170 Manuale di sistema, 11/2010
Per la ricezione, i parametri DONE, BUSY e ERROR servono per indicare lo stato di elaborazione del blocco funzionale. Oltre all'informazione relativa alla comparsa di un errore (ERROR = 1) l'utente tramite il parametro STATUS riceve anche informazioni dettagliate sul tipo di errore.
Il significato del parametro RCVD_LEN è già stato indicato sopra. Qualora al parametro LEN fosse stato assegnato il valore 0, nel parametro RCVD_LEN viene indicato quanti dati sono contenuti nell'ultimo blocco dati ricevuto. Se nel parametro LEN è stato parametrizzato un valore diverso da 0, lo stesso valore è riportato in RCVD_LEN .
Il parametro DATA contiene l'indirizzo e la lunghezza dell'area di trasmissione. Qui è possibile ricavare i dati ricevuti per l'ulteriore elaborazione.
FDISCON (FB66)
Tabella 5- 14 Esempio di richiamo
CALL "TDISCON" , DB66 REQ :=M12.0 ID :=W#16#1 DONE :=M13.0 BUSY :=M14.0 ERROR :=M15.0 STATUS :=MW400
Il blocco funzionale TDISCON (FB66) viene impiegato per eliminare un collegamento esistente. Per eliminare il collegamento, il parametro di ricezione REQ viene impostato sul valore 1. L'eliminazione del collegamento avviene quindi mediante il fianco crescente..
Tramite il parametro ID viene comunicato al blocco funzionale qual'è il collegamento da eliminare. Tramite questo parametro viene indicato un riferimento a un collegamento definito e già creato tramite una struttura di tipo TCON_PAR .
Tramite i parametri DONE, BUSY e ERROR è possibile consultare lo stato dell'elaborazione del blocco funzionale. Oltre all'informazione relativa alla comparsa di un errore (ERROR = 1) l'utente tramite il parametro STATUS riceve anche informazioni dettagliate sul tipo di errore.
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione Manuale di sistema, 11/2010 171
5.3.4 Blocchi di comunicazione SIMATIC per Ethernet CP
5.3.4.1 Panoramica blocchi comunicazione SIMATIC
Panoramica Sono disponibili i seguenti blocchi di comunicazione:
● AG_SEND (FC5)
● AG_RECV (FC6)
● AG_LSEND (FC50)
● AG_LRECV (FC60)
● AG_SSEND (FC53)
● AG_SRECV (FC63)
Di seguito vengono descritti solo i blocchi di comunicazione SIMATIC AG_SEND e AG_RECV.
Ulteriori informazioni sono contenute nel manuale di programmazione SIMATIC NET Funzioni (FC) e blocchi funzionali (FB) per SIMATIC NET S7-CPs.
Nota
Per CP 300 la lunghezza di invio e di ricezione massima è di 8192 byte per richiamo di funzione (AG_SEND e AG_RECV).
Anche per CP 400 è possibile utilizzare le funzioni AG_SEND e AG_RECV. In questo caso comunque generalmente la lunghezza dei dati trasferibili è limitata a <=240 byte per ogni ordine!
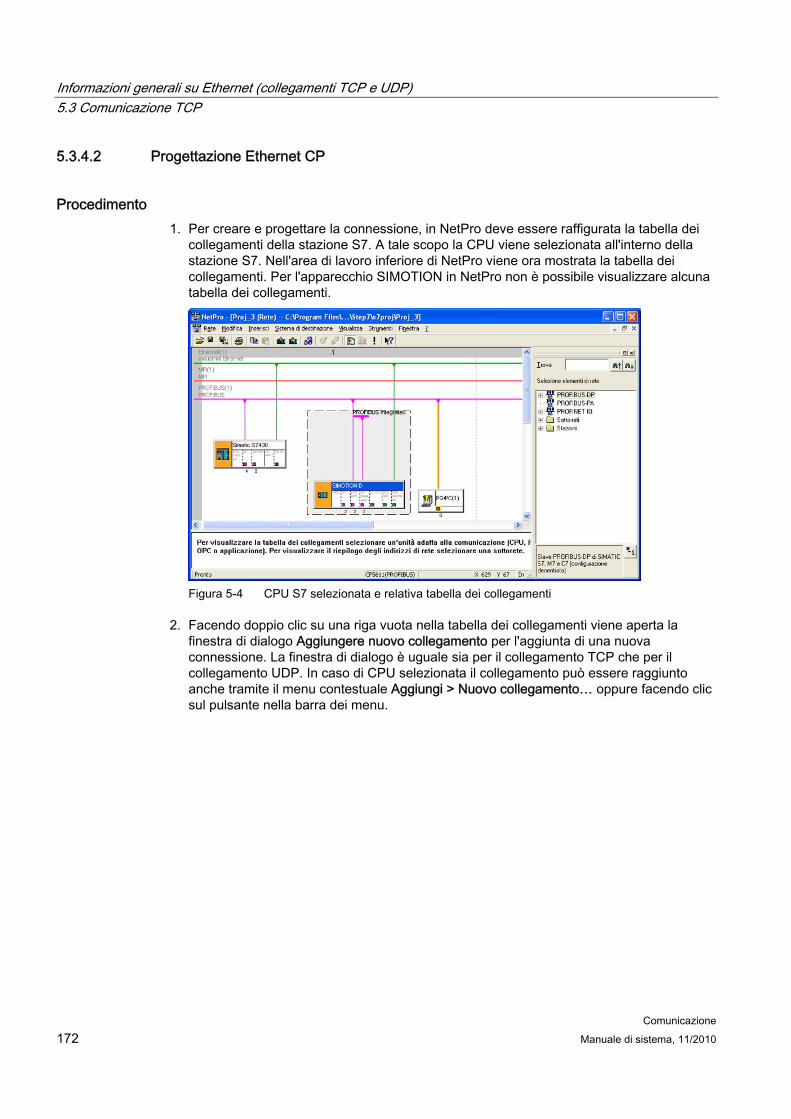
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione 172 Manuale di sistema, 11/2010
5.3.4.2 Progettazione Ethernet CP
Procedimento 1. Per creare e progettare la connessione, in NetPro deve essere raffigurata la tabella dei
collegamenti della stazione S7. A tale scopo la CPU viene selezionata all'interno della stazione S7. Nell'area di lavoro inferiore di NetPro viene ora mostrata la tabella dei collegamenti. Per l'apparecchio SIMOTION in NetPro non è possibile visualizzare alcuna tabella dei collegamenti.
Figura 5-4 CPU S7 selezionata e relativa tabella dei collegamenti
2. Facendo doppio clic su una riga vuota nella tabella dei collegamenti viene aperta la finestra di dialogo Aggiungere nuovo collegamento per l'aggiunta di una nuova connessione. La finestra di dialogo è uguale sia per il collegamento TCP che per il collegamento UDP. In caso di CPU selezionata il collegamento può essere raggiunto anche tramite il menu contestuale Aggiungi > Nuovo collegamento… oppure facendo clic sul pulsante nella barra dei menu.
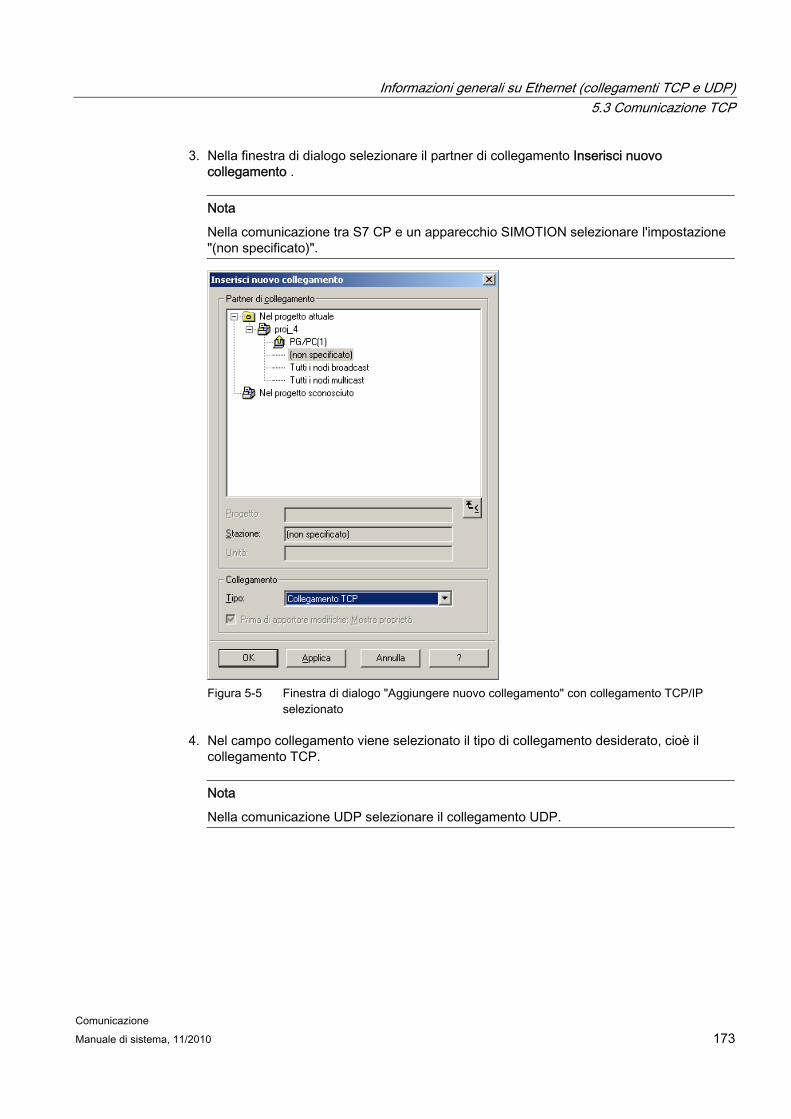
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione Manuale di sistema, 11/2010 173
3. Nella finestra di dialogo selezionare il partner di collegamento Inserisci nuovo collegamento .
Nota
Nella comunicazione tra S7 CP e un apparecchio SIMOTION selezionare l'impostazione "(non specificato)".
Figura 5-5 Finestra di dialogo "Aggiungere nuovo collegamento" con collegamento TCP/IP
selezionato
4. Nel campo collegamento viene selezionato il tipo di collegamento desiderato, cioè il collegamento TCP.
Nota
Nella comunicazione UDP selezionare il collegamento UDP.
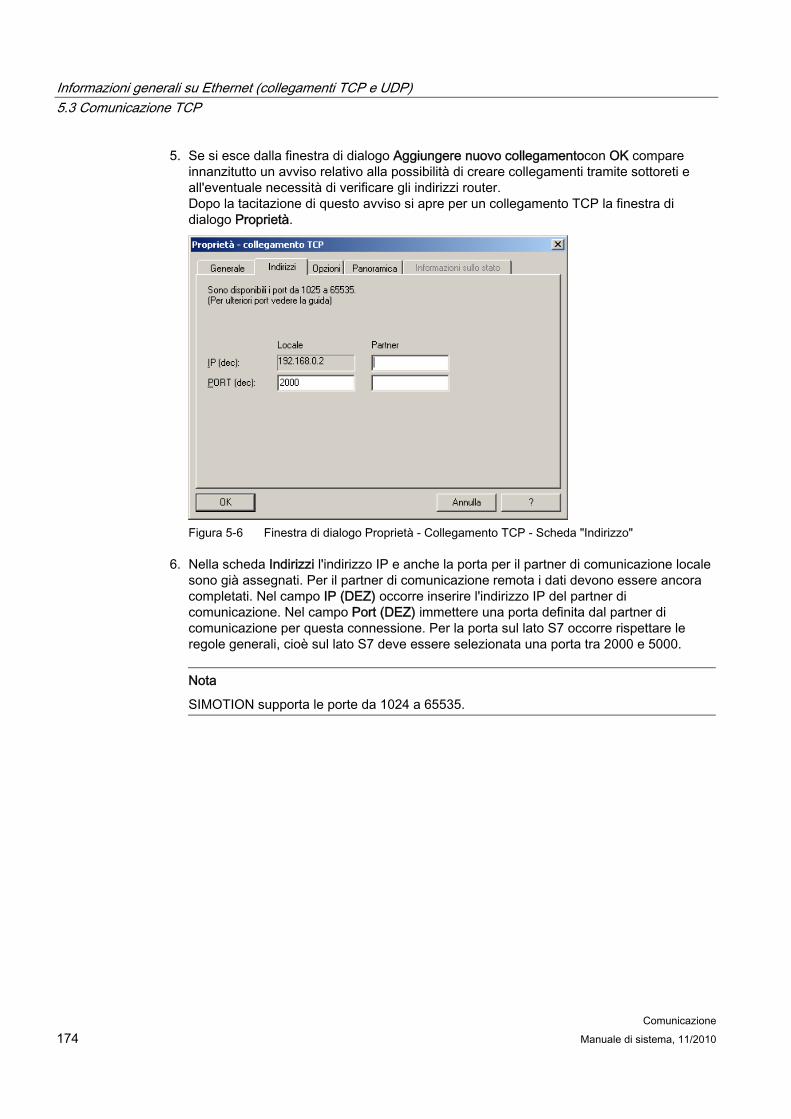
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione 174 Manuale di sistema, 11/2010
5. Se si esce dalla finestra di dialogo Aggiungere nuovo collegamentocon OK compare innanzitutto un avviso relativo alla possibilità di creare collegamenti tramite sottoreti e all'eventuale necessità di verificare gli indirizzi router. Dopo la tacitazione di questo avviso si apre per un collegamento TCP la finestra di dialogo Proprietà.
Figura 5-6 Finestra di dialogo Proprietà - Collegamento TCP - Scheda "Indirizzo"
6. Nella scheda Indirizzi l'indirizzo IP e anche la porta per il partner di comunicazione locale sono già assegnati. Per il partner di comunicazione remota i dati devono essere ancora completati. Nel campo IP (DEZ) occorre inserire l'indirizzo IP del partner di comunicazione. Nel campo Port (DEZ) immettere una porta definita dal partner di comunicazione per questa connessione. Per la porta sul lato S7 occorre rispettare le regole generali, cioè sul lato S7 deve essere selezionata una porta tra 2000 e 5000.
Nota
SIMOTION supporta le porte da 1024 a 65535.
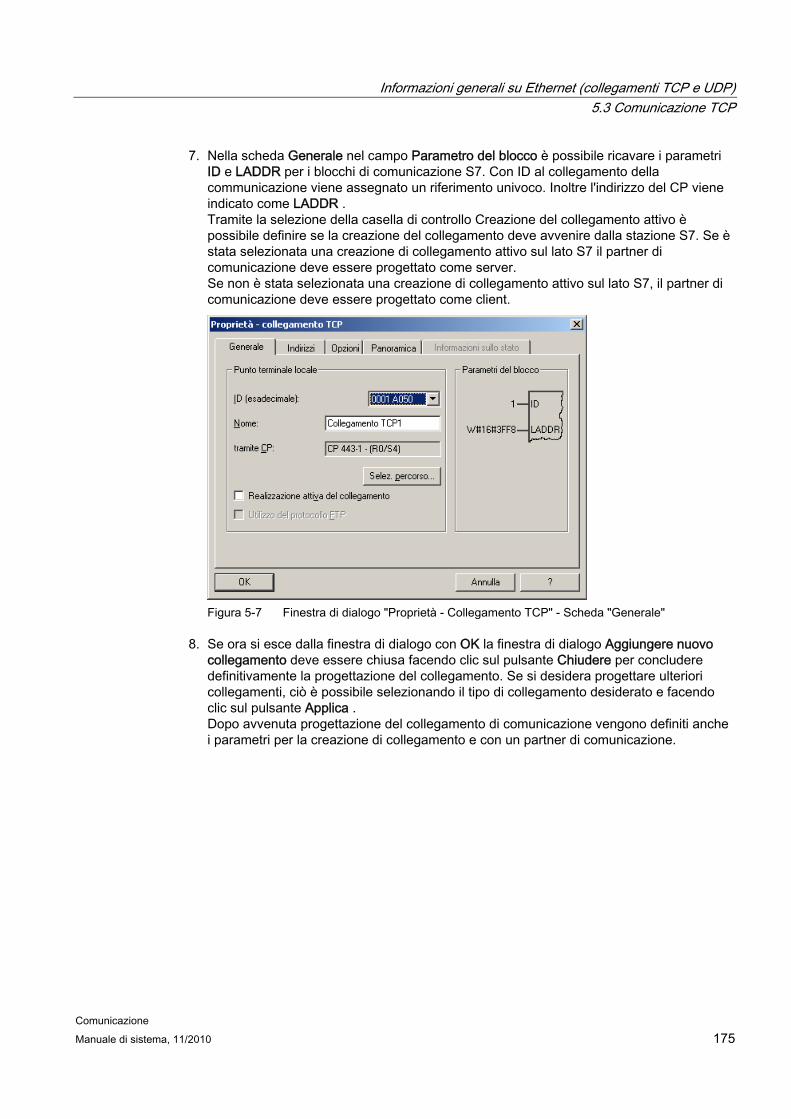
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione Manuale di sistema, 11/2010 175
7. Nella scheda Generale nel campo Parametro del blocco è possibile ricavare i parametri ID e LADDR per i blocchi di comunicazione S7. Con ID al collegamento della communicazione viene assegnato un riferimento univoco. Inoltre l'indirizzo del CP viene indicato come LADDR . Tramite la selezione della casella di controllo Creazione del collegamento attivo è possibile definire se la creazione del collegamento deve avvenire dalla stazione S7. Se è stata selezionata una creazione di collegamento attivo sul lato S7 il partner di comunicazione deve essere progettato come server. Se non è stata selezionata una creazione di collegamento attivo sul lato S7, il partner di comunicazione deve essere progettato come client.
Figura 5-7 Finestra di dialogo "Proprietà - Collegamento TCP" - Scheda "Generale"
8. Se ora si esce dalla finestra di dialogo con OK la finestra di dialogo Aggiungere nuovo collegamento deve essere chiusa facendo clic sul pulsante Chiudere per concludere definitivamente la progettazione del collegamento. Se si desidera progettare ulteriori collegamenti, ciò è possibile selezionando il tipo di collegamento desiderato e facendo clic sul pulsante Applica . Dopo avvenuta progettazione del collegamento di comunicazione vengono definiti anche i parametri per la creazione di collegamento e con un partner di comunicazione.
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.3 Comunicazione TCP
Comunicazione 176 Manuale di sistema, 11/2010
5.3.4.3 Descrizione dei blocchi di comunicazione
Panoramica Segue la descrizione dei blocchi di comunicazione con i quali è possibile programmare la creazione del collegamento.
AG_SEND (FC5)
Tabella 5- 15 Esempio di richiamo
CALL "AG_Send" Act :=M0.0 ID :=1 LADDR :=W#16#3FFC SEND :=P#DB100.DBX0.0 BYTE 1000 LEN :=1000 DONE :=M0.1 ERROR :=M0.2 STATUS :=MW10
I parametri ID e LADDR vengono mostrati in NetPro alla creazione del collegamento e devono essere trasferiti al richiamo delle funzioni. Il trasferimento viene avviato con un fronte positivo sull'ingresso ACT . Il parametro SEND definisce i dati di trasmissione, mentre tramite LEN viene stabilita la lunghezza trasmessa. I parametri DONE, ERROR e STATUS servono per la diagnostica o forniscono lo stato dell'attività di trasmissione.
AG_RECV (FC6)
Tabella 5- 16 Esempio di richiamo
Call "AG_RECV" ID :=1 LADDR :=W#16#3FFC RECV :=P#DB110.DBX0.0 BYTE 1000 NDR :=M2.0 ERROR :=M2.1 STATUS :=MW14 LEN :=MW16
Alla creazione del collegamento in NetPro i parametri ID e LADDR di NetPro vengono definiti e devono essere trasferiti al richiamo delle funzioni.
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.4 Comunicazione UDP
Comunicazione Manuale di sistema, 11/2010 177
Nel parametro RECV viene trasmesso un puntatore che mostra il campo dati nel quale vengono salvati i dati ricevuti. Con TRUE sull'uscita NDR viene comunicato all'utente se sono stati ricevuti nuovi dati. Il parametro LEN indica quanti byte sono stati letti. I parametri ERROR e STATUS servono per la diagnostica o forniscono lo stato del richiamo di ricezione.
Nota
Nella comunicazione TCP viene impostata l'uscita NDR se il campo dati per i dati ricevuti è pieno.
5.4 Comunicazione UDP
5.4.1 Panoramica Comunicazione UDP
Comunicazione con UDP (User Datagram Protocol) UDP mette a disposizione una procedura per inviare e ricevere dati tramite Ethernet da un programma utente con un minimo di meccanismo di protocollo. La comunicazione tramite UDP non prevede alcun feedback in merito ai dati trasmessi. La comunicazione avviene nel lato di trasmissione e in quello di ricezione tramite porte. Al contrario di quanto avviene per TCP non occorre programmare alcuna creazione/eliminazione del collegamento.
Principio della comunicazione UDP ● Per la ricezione indirizzare il comando alla porta da utilizzare sul proprio componente per
la comunicazione.
● Al momento di inviare i dati, specificare l'indirizzo IP e il numero di porta del sistema di destinazione, nonché il numero di porta del controllore locale.
● È possibile indicare se la porta dal proprio lato deve rimanere riservata dopo l'esecuzione dell'ordine di comunicazione. UDP non è un modello protetto. Pertanto in seguito alla trasmissione può verificarsi la perdita dei dati nel caso in cui i dati non vengono letti tempestivamente nel buffer. Una trasmissione sicura dei dati deve essere programmata tramite la propria applicazione, ad es. mediante conferma della ricezione dei dati.
● Per l'invio sono necessari almeno i dati seguenti:
– Indirizzo IP del partner di comunicazione
– Il "proprio" numero di porta
– Il numero di porta del partner di comunicazione
● UDP non è un protocollo di trasmissione sicuro. Un feedback sull'esito corretto della trasmissione dei dati deve essere programmato autonomamente nel programma utente.
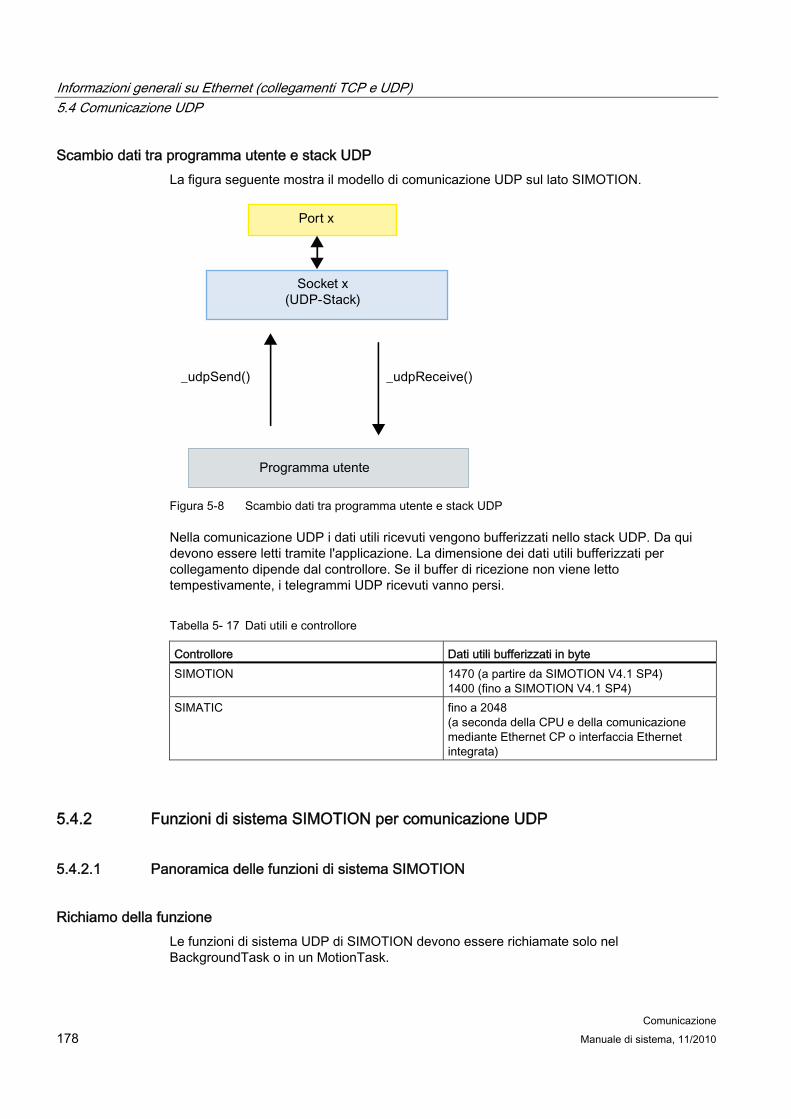
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.4 Comunicazione UDP
Comunicazione 178 Manuale di sistema, 11/2010
Scambio dati tra programma utente e stack UDP La figura seguente mostra il modello di comunicazione UDP sul lato SIMOTION.
Figura 5-8 Scambio dati tra programma utente e stack UDP
Nella comunicazione UDP i dati utili ricevuti vengono bufferizzati nello stack UDP. Da qui devono essere letti tramite l'applicazione. La dimensione dei dati utili bufferizzati per collegamento dipende dal controllore. Se il buffer di ricezione non viene letto tempestivamente, i telegrammi UDP ricevuti vanno persi.
Tabella 5- 17 Dati utili e controllore
Controllore Dati utili bufferizzati in byte SIMOTION 1470 (a partire da SIMOTION V4.1 SP4)
1400 (fino a SIMOTION V4.1 SP4) SIMATIC fino a 2048
(a seconda della CPU e della comunicazione mediante Ethernet CP o interfaccia Ethernet integrata)
5.4.2 Funzioni di sistema SIMOTION per comunicazione UDP
5.4.2.1 Panoramica delle funzioni di sistema SIMOTION
Richiamo della funzione Le funzioni di sistema UDP di SIMOTION devono essere richiamate solo nel BackgroundTask o in un MotionTask.
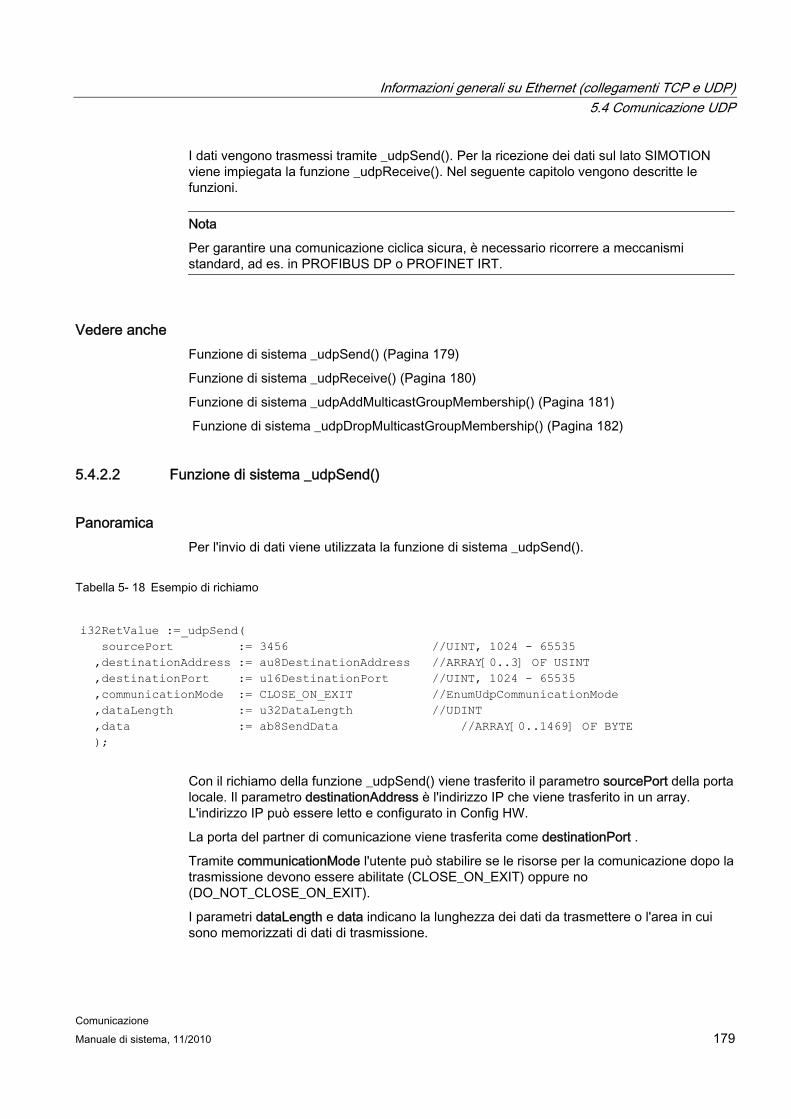
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.4 Comunicazione UDP
Comunicazione Manuale di sistema, 11/2010 179
I dati vengono trasmessi tramite _udpSend(). Per la ricezione dei dati sul lato SIMOTION viene impiegata la funzione _udpReceive(). Nel seguente capitolo vengono descritte le funzioni.
Nota
Per garantire una comunicazione ciclica sicura, è necessario ricorrere a meccanismi standard, ad es. in PROFIBUS DP o PROFINET IRT.
Vedere anche Funzione di sistema _udpSend() (Pagina 179)
Funzione di sistema _udpReceive() (Pagina 180)
Funzione di sistema _udpAddMulticastGroupMembership() (Pagina 181)
Funzione di sistema _udpDropMulticastGroupMembership() (Pagina 182)
5.4.2.2 Funzione di sistema _udpSend()
Panoramica Per l'invio di dati viene utilizzata la funzione di sistema _udpSend().
Tabella 5- 18 Esempio di richiamo
i32RetValue :=_udpSend( sourcePort := 3456 //UINT, 1024 - 65535 ,destinationAddress := au8DestinationAddress //ARRAY[0..3] OF USINT ,destinationPort := u16DestinationPort //UINT, 1024 - 65535 ,communicationMode := CLOSE_ON_EXIT //EnumUdpCommunicationMode ,dataLength := u32DataLength //UDINT ,data := ab8SendData //ARRAY[0..1469] OF BYTE );
Con il richiamo della funzione _udpSend() viene trasferito il parametro sourcePort della porta locale. Il parametro destinationAddress è l'indirizzo IP che viene trasferito in un array. L'indirizzo IP può essere letto e configurato in Config HW.
La porta del partner di comunicazione viene trasferita come destinationPort .
Tramite communicationMode l'utente può stabilire se le risorse per la comunicazione dopo la trasmissione devono essere abilitate (CLOSE_ON_EXIT) oppure no (DO_NOT_CLOSE_ON_EXIT).
I parametri dataLength e data indicano la lunghezza dei dati da trasmettere o l'area in cui sono memorizzati di dati di trasmissione.
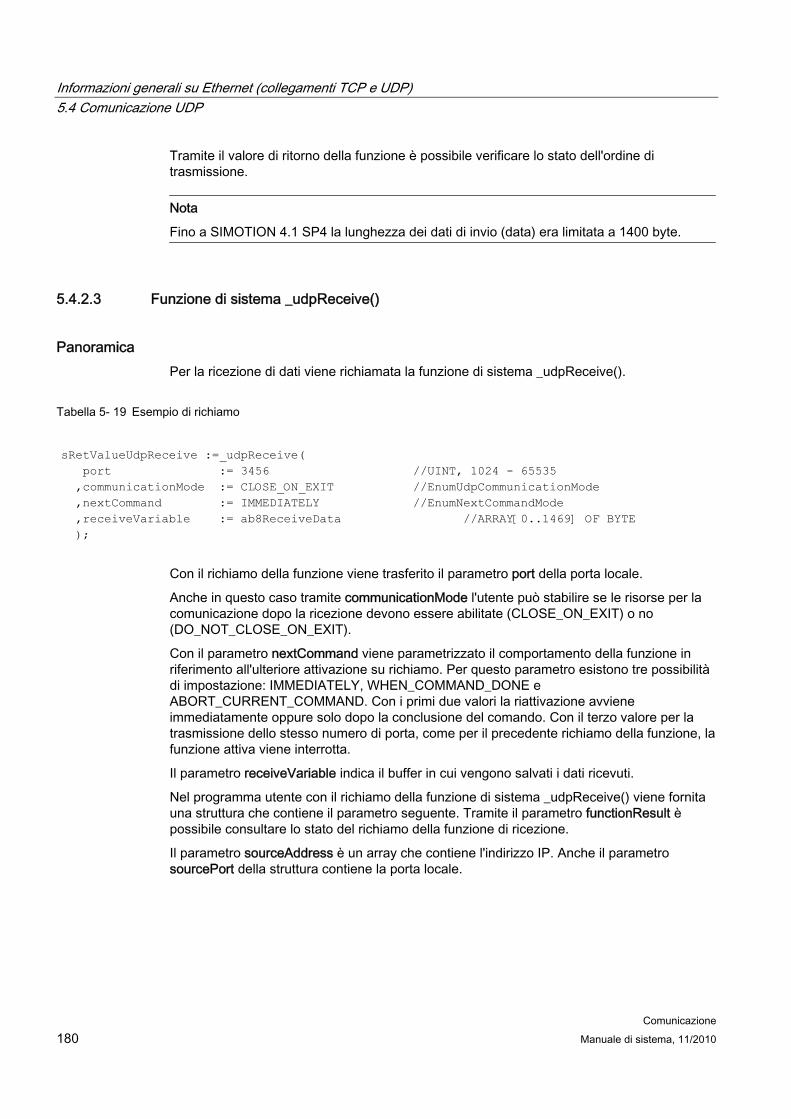
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.4 Comunicazione UDP
Comunicazione 180 Manuale di sistema, 11/2010
Tramite il valore di ritorno della funzione è possibile verificare lo stato dell'ordine di trasmissione.
Nota
Fino a SIMOTION 4.1 SP4 la lunghezza dei dati di invio (data) era limitata a 1400 byte.
5.4.2.3 Funzione di sistema _udpReceive()
Panoramica Per la ricezione di dati viene richiamata la funzione di sistema _udpReceive().
Tabella 5- 19 Esempio di richiamo
sRetValueUdpReceive :=_udpReceive( port := 3456 //UINT, 1024 - 65535 ,communicationMode := CLOSE_ON_EXIT //EnumUdpCommunicationMode ,nextCommand := IMMEDIATELY //EnumNextCommandMode ,receiveVariable := ab8ReceiveData //ARRAY[0..1469] OF BYTE );
Con il richiamo della funzione viene trasferito il parametro port della porta locale.
Anche in questo caso tramite communicationMode l'utente può stabilire se le risorse per la comunicazione dopo la ricezione devono essere abilitate (CLOSE_ON_EXIT) o no (DO_NOT_CLOSE_ON_EXIT).
Con il parametro nextCommand viene parametrizzato il comportamento della funzione in riferimento all'ulteriore attivazione su richiamo. Per questo parametro esistono tre possibilità di impostazione: IMMEDIATELY, WHEN_COMMAND_DONE e ABORT_CURRENT_COMMAND. Con i primi due valori la riattivazione avviene immediatamente oppure solo dopo la conclusione del comando. Con il terzo valore per la trasmissione dello stesso numero di porta, come per il precedente richiamo della funzione, la funzione attiva viene interrotta.
Il parametro receiveVariable indica il buffer in cui vengono salvati i dati ricevuti.
Nel programma utente con il richiamo della funzione di sistema _udpReceive() viene fornita una struttura che contiene il parametro seguente. Tramite il parametro functionResult è possibile consultare lo stato del richiamo della funzione di ricezione.
Il parametro sourceAddress è un array che contiene l'indirizzo IP. Anche il parametro sourcePort della struttura contiene la porta locale.
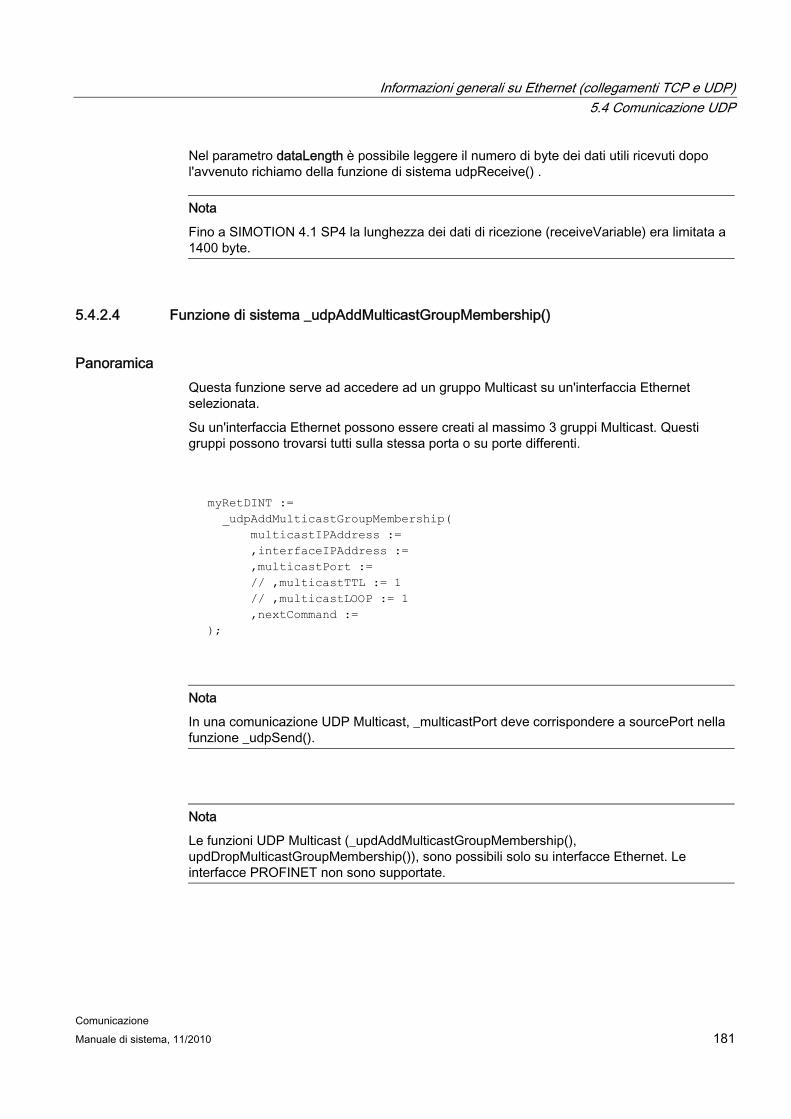
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.4 Comunicazione UDP
Comunicazione Manuale di sistema, 11/2010 181
Nel parametro dataLength è possibile leggere il numero di byte dei dati utili ricevuti dopo l'avvenuto richiamo della funzione di sistema udpReceive() .
Nota
Fino a SIMOTION 4.1 SP4 la lunghezza dei dati di ricezione (receiveVariable) era limitata a 1400 byte.
5.4.2.4 Funzione di sistema _udpAddMulticastGroupMembership()
Panoramica Questa funzione serve ad accedere ad un gruppo Multicast su un'interfaccia Ethernet selezionata.
Su un'interfaccia Ethernet possono essere creati al massimo 3 gruppi Multicast. Questi gruppi possono trovarsi tutti sulla stessa porta o su porte differenti.
myRetDINT := _udpAddMulticastGroupMembership( multicastIPAddress := ,interfaceIPAddress := ,multicastPort := // ,multicastTTL := 1 // ,multicastLOOP := 1 ,nextCommand := );
Nota
In una comunicazione UDP Multicast, _multicastPort deve corrispondere a sourcePort nella funzione _udpSend().
Nota
Le funzioni UDP Multicast (_updAddMulticastGroupMembership(), updDropMulticastGroupMembership()), sono possibili solo su interfacce Ethernet. Le interfacce PROFINET non sono supportate.
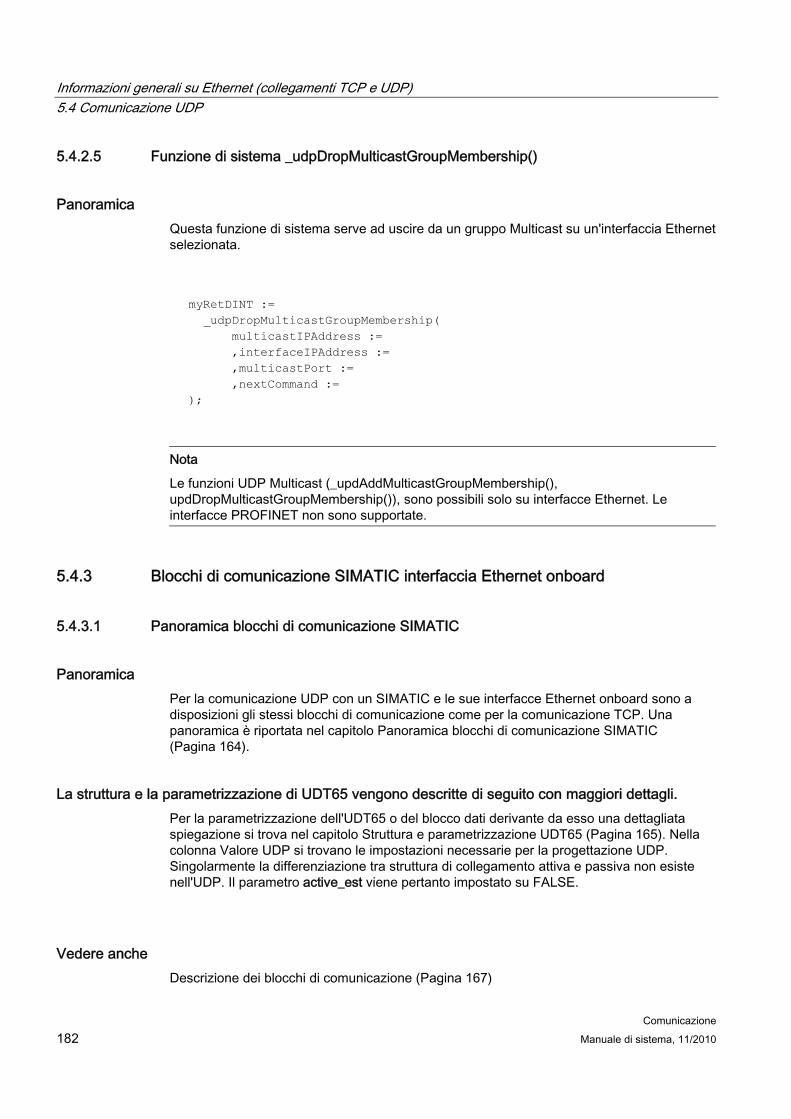
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.4 Comunicazione UDP
Comunicazione 182 Manuale di sistema, 11/2010
5.4.2.5 Funzione di sistema _udpDropMulticastGroupMembership()
Panoramica Questa funzione di sistema serve ad uscire da un gruppo Multicast su un'interfaccia Ethernet selezionata.
myRetDINT := _udpDropMulticastGroupMembership( multicastIPAddress := ,interfaceIPAddress := ,multicastPort := ,nextCommand := );
Nota
Le funzioni UDP Multicast (_updAddMulticastGroupMembership(), updDropMulticastGroupMembership()), sono possibili solo su interfacce Ethernet. Le interfacce PROFINET non sono supportate.
5.4.3 Blocchi di comunicazione SIMATIC interfaccia Ethernet onboard
5.4.3.1 Panoramica blocchi di comunicazione SIMATIC
Panoramica Per la comunicazione UDP con un SIMATIC e le sue interfacce Ethernet onboard sono a disposizioni gli stessi blocchi di comunicazione come per la comunicazione TCP. Una panoramica è riportata nel capitolo Panoramica blocchi di comunicazione SIMATIC (Pagina 164).
La struttura e la parametrizzazione di UDT65 vengono descritte di seguito con maggiori dettagli. Per la parametrizzazione dell'UDT65 o del blocco dati derivante da esso una dettagliata spiegazione si trova nel capitolo Struttura e parametrizzazione UDT65 (Pagina 165). Nella colonna Valore UDP si trovano le impostazioni necessarie per la progettazione UDP. Singolarmente la differenziazione tra struttura di collegamento attiva e passiva non esiste nell'UDP. Il parametro active_est viene pertanto impostato su FALSE.
Vedere anche Descrizione dei blocchi di comunicazione (Pagina 167)
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.4 Comunicazione UDP
Comunicazione Manuale di sistema, 11/2010 183
5.4.4 Blocchi di comunicazione SIMATIC per Ethernet CP
5.4.4.1 Panoramica sul blocco di comunicazione S7 UDP
Panoramica Le funzioni utilizzate per questo caso di impiego sono le stesse funzioni S7 già descritte (vedere Panoramica blocchi comunicazione SIMATIC (Pagina 171)).
Il processo di progettazione per una comunicazione UDP è simile a quella per la comunicazione TCP. Singolarmente per la progettazione del collegamento in NetPro occorre selezionare i parametri specifici UDP. Inoltre non è necessario definire una struttura di collegamento attiva o passiva.
Nota
Per la CP 300 la lunghezza massima di invio e ricezione per richiamo di funzione (AG_SEND e AG_RECV) è pari a 2048 byte.
Anche per CP 400 è possibile utilizzare le funzioni AG_SEND e AG_RECV. In questo caso comunque generalmente la lunghezza dei dati trasferibili è limitata a <=240 byte per ogni ordine!
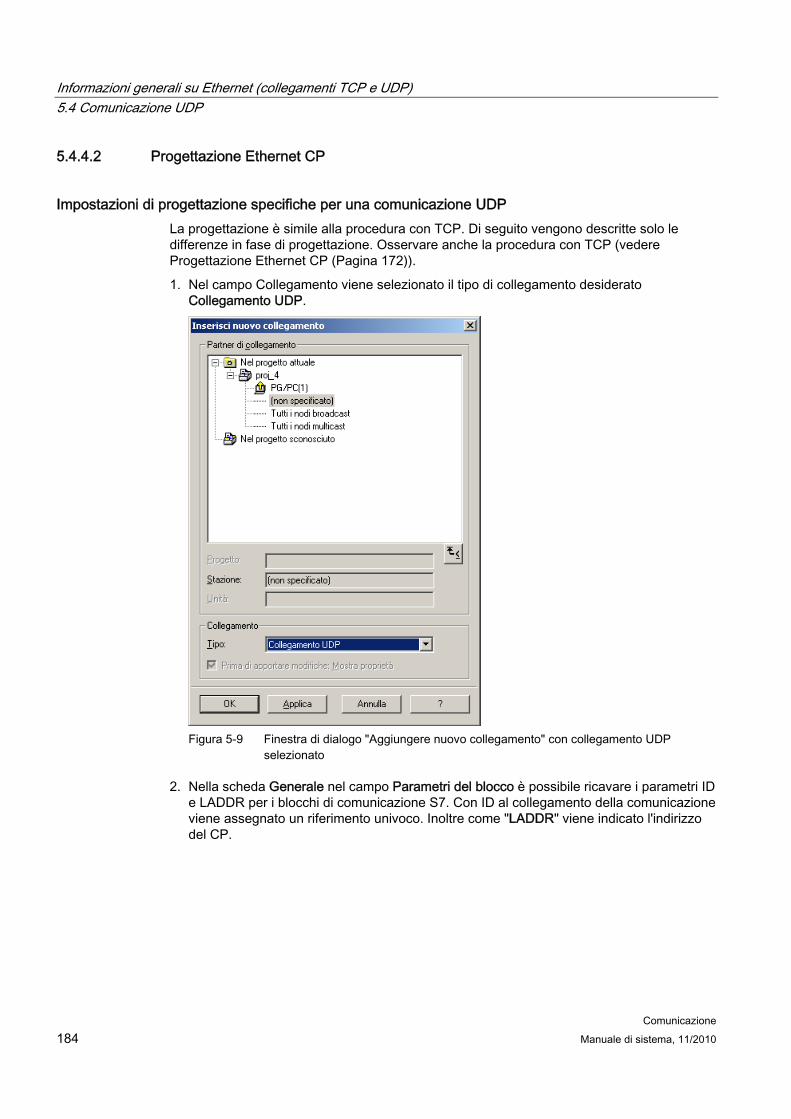
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.4 Comunicazione UDP
Comunicazione 184 Manuale di sistema, 11/2010
5.4.4.2 Progettazione Ethernet CP
Impostazioni di progettazione specifiche per una comunicazione UDP La progettazione è simile alla procedura con TCP. Di seguito vengono descritte solo le differenze in fase di progettazione. Osservare anche la procedura con TCP (vedere Progettazione Ethernet CP (Pagina 172)).
1. Nel campo Collegamento viene selezionato il tipo di collegamento desiderato Collegamento UDP.
Figura 5-9 Finestra di dialogo "Aggiungere nuovo collegamento" con collegamento UDP
selezionato
2. Nella scheda Generale nel campo Parametri del blocco è possibile ricavare i parametri ID e LADDR per i blocchi di comunicazione S7. Con ID al collegamento della comunicazione viene assegnato un riferimento univoco. Inoltre come "LADDR" viene indicato l'indirizzo del CP.
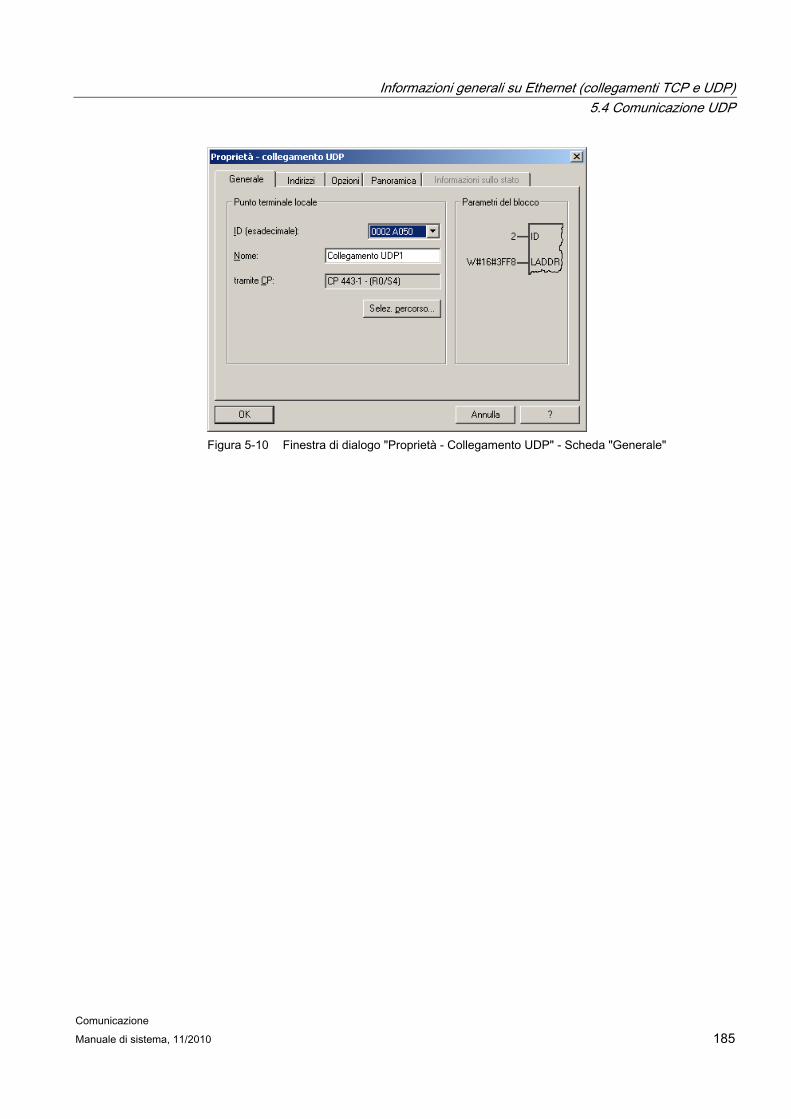
Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.4 Comunicazione UDP
Comunicazione Manuale di sistema, 11/2010 185
Figura 5-10 Finestra di dialogo "Proprietà - Collegamento UDP" - Scheda "Generale"

Informazioni generali su Ethernet (collegamenti TCP e UDP) 5.4 Comunicazione UDP
Comunicazione 186 Manuale di sistema, 11/2010
Comunicazione Manuale di sistema, 11/2010 187
Routing - Comunicazione oltre i limiti della rete 66.1 Cosa significa routing?
L'espressione routing definisce il trasferimento di informazioni da una rete x a una rete y.
A questo proposito viene operata una distinzione tra un routing intelligente e auto-ricettivo (ad es. routing IP in Internet) e un routing conforme alle tabelle di routing definite in precedenza (ad es. routing S7).
Routing IP Il routing IP è una procedura di routing auto-ricettivo (che può essere eseguita anche manualmente), applicabile esclusivamente alle reti di comunicazione Ethernet che utilizzano il protocollo IP, come ad es. Internet.
La funzione viene assolta da speciali router che inoltrano le informazioni alle reti adiacenti sulla base dell'indirizzo IP, in assenza di indirizzo IP noto nella rete propria.
Nota
Il routing IP NON viene supportato da SIMOTION. Tra le interfacce Ethernet è possibile un routing S7.
Routing S7 Il routing S7 è una procedura di routing basata sulle tabelle di routing progettate in precedenza, ma che è anche in grado di scambiare informazioni tra diverse reti di comunicazione, ad es. tra Ethernet, PROFIBUS e MPI. Queste tabelle di routing possono essere create come tabelle di interconnessione in NetPro.
Il routing S7 non utilizza l'indirizzo IP, ma i cosiddetti ID di sottorete nell'ambito del protocollo S7.
● Trasferimento di informazioni da Ethernet a MPI e viceversa
● Trasferimento di informazioni da Ethernet a PROFIBUS e viceversa
● Trasferimento di informazioni da MPI a PROFIBUS e viceversa
● Comunicazione di informazioni da Ethernet a Ethernet (SIMOTION da V4.1.2, inclusi PROFINET, CP343, CPU 315-2 PN/DP...)
Routing - Comunicazione oltre i limiti della rete 6.2 Progettazione del routing S7
Comunicazione 188 Manuale di sistema, 11/2010
CIDR Classless Inter-Domain Routing Classless Inter-Domain Routing (CIDR) descrive un processo per l'utilizzo efficiente dell'esistente area di indirizzi IP a 32 bit (IPv4). È stato introdotto per ridurre le dimensioni delle tabelle di routing e per utilizzare in modo migliore le disponibili aree di indirizzi. La funzione CIDR (classless inter domain routing) comprende il subnetting e il supernetting.
Nota
CIDR viene supportato soprattutto da apparecchi SIMOTION. Con gli apparecchi SIMATIC osservare le indicazioni nei manuali del prodotto.
Assegnazione PG/PC Per il routing S7 è eventualmente necessaria una modifica dell'assegnazione PG. Ora è possibile effettuare tale modifica nella barra degli strumenti in SIMOTION SCOUT tramite il pulsante Assegna PG. In questo modo viene richiamata la finestra delle proprietà per l'assegnazione PG, nella quale è possibile adeguare l'assegnazione e impostarla sullo stato "attivo" (accesso S7ONLINE).
Nota
Ulteriori informazioni su Ethernet/PROFINET e le necessarie impostazioni per il routing si trovano nelle informazioni sul prodotto SIMOTION SCOUT Panoramica delle possibilità di service e diagnostica, nonché nella Guida in linea su questo argomento.
6.2 Progettazione del routing S7 Il routing S7 viene progettato in STEP7 / SIMOTION SCOUT con l'ausilio della progettazione di rete "NetPro".
Tutte le stazioni comprese nella progettazione di rete possono scambiarsi reciprocamente le informazioni. A tale scopo, è necessario creare tabelle di connessione in NetPro. Le tabelle di routing necessarie vengono generate automaticamente al momento della compilazione del progetto, ma devono poi essere caricate in tutte le stazioni coinvolte.
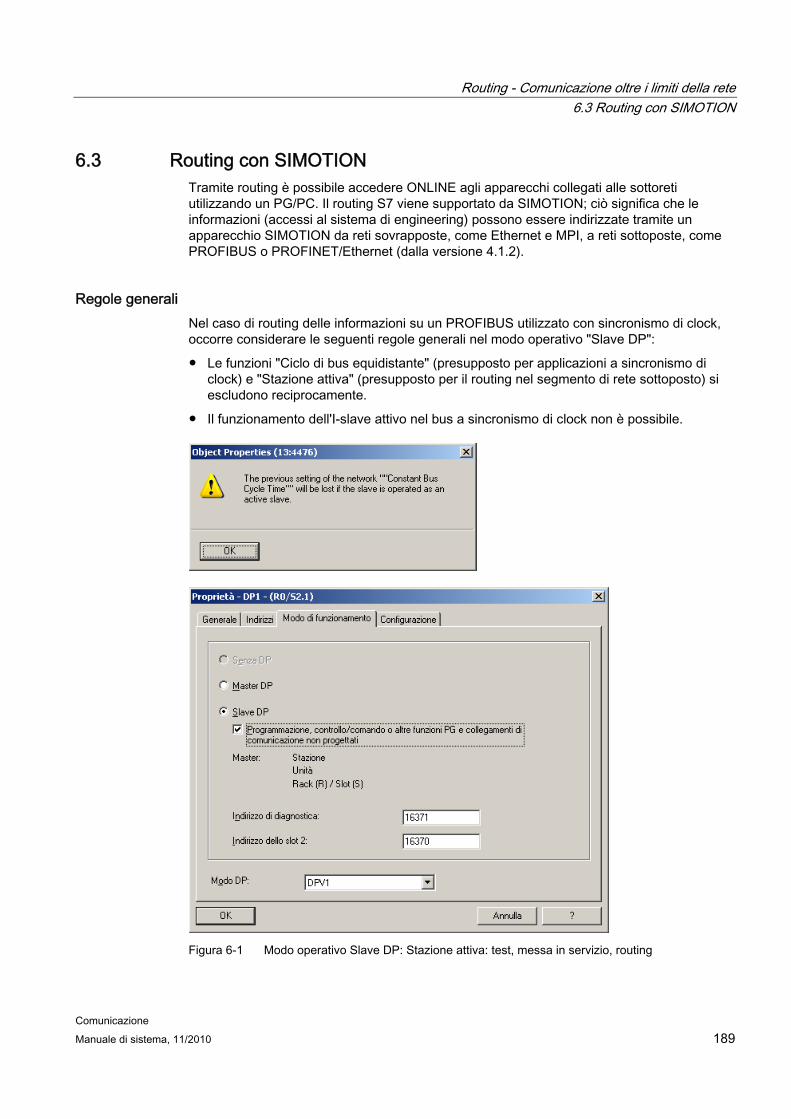
Routing - Comunicazione oltre i limiti della rete 6.3 Routing con SIMOTION
Comunicazione Manuale di sistema, 11/2010 189
6.3 Routing con SIMOTION Tramite routing è possibile accedere ONLINE agli apparecchi collegati alle sottoreti utilizzando un PG/PC. Il routing S7 viene supportato da SIMOTION; ciò significa che le informazioni (accessi al sistema di engineering) possono essere indirizzate tramite un apparecchio SIMOTION da reti sovrapposte, come Ethernet e MPI, a reti sottoposte, come PROFIBUS o PROFINET/Ethernet (dalla versione 4.1.2).
Regole generali Nel caso di routing delle informazioni su un PROFIBUS utilizzato con sincronismo di clock, occorre considerare le seguenti regole generali nel modo operativo "Slave DP":
● Le funzioni "Ciclo di bus equidistante" (presupposto per applicazioni a sincronismo di clock) e "Stazione attiva" (presupposto per il routing nel segmento di rete sottoposto) si escludono reciprocamente.
● Il funzionamento dell'I-slave attivo nel bus a sincronismo di clock non è possibile.
Figura 6-1 Modo operativo Slave DP: Stazione attiva: test, messa in servizio, routing
Routing - Comunicazione oltre i limiti della rete 6.4 Routing con SIMOTION D (esempio D4x5 con CBE30)
Comunicazione 190 Manuale di sistema, 11/2010
La casella di controllo "Programmazione, Stato/comando o altre funzioni PG …" deve essere attiva, ad es. se si desidera eseguire spesso tramite questa interfaccia funzioni PG necessarie per la messa in servizio e il test oppure se si desidera utilizzare funzioni PG (ad es. starter) su azionamenti SINAMICS per passare attraverso l'interfaccia master DP sottoposta e in cascata di SIMOTION (routing S7).
Attivando l'opzione "Programmazione, Stato/comando o altre funzioni PG ..." l'interfaccia diventa un nodo attivo in PROFIBUS (cioè l'interfaccia partecipa al ciclo del routing PROFIBUS). Sono quindi possibili le funzioni seguenti:
● Programmazione (ad es. caricamento)
● Test (stato/comando)
● Routing S7 (I-slave come trasmissione di rete)
La durata del ciclo di bus può prolungarsi. Per applicazioni critiche a livello temporale e se per la comunicazione non sono necessari il routing S7 né la funzionalità client, questa opzione non deve essere attivata.
Nota
Se la casella di controllo "Programmazione, stato/comando o altre funzioni PG..." non è attiva, l'interfaccia funziona solo come server dati ciclici, cioè il routing S7 non è possibile.
6.4 Routing con SIMOTION D (esempio D4x5 con CBE30)
Routing tra le diverse interfacce Le due interfacce Ethernet standard X120 e X130 di SIMOTION D formano una sottorete propria; in modo analogo, tutte le porte su CBE30 formano una sottorete comune.
● Il routing da una sottorete all'altra (routing IP) non viene supportato. A tale scopo è possibile impiegare un router IP esterno.
● Il routing S7 da una sottorete PROFINET/Ethernet a una PROFIBUS è possibile.
Ne conseguono tre possibilità per collegare un PG/PC o HMI a un SIMOTION D con CBE30 tramite routing S7.
Nota
Le interfacce Ethernet X120 o X130 ed il CBE30 devono trovarsi in sottoreti diverse per il routing S7.
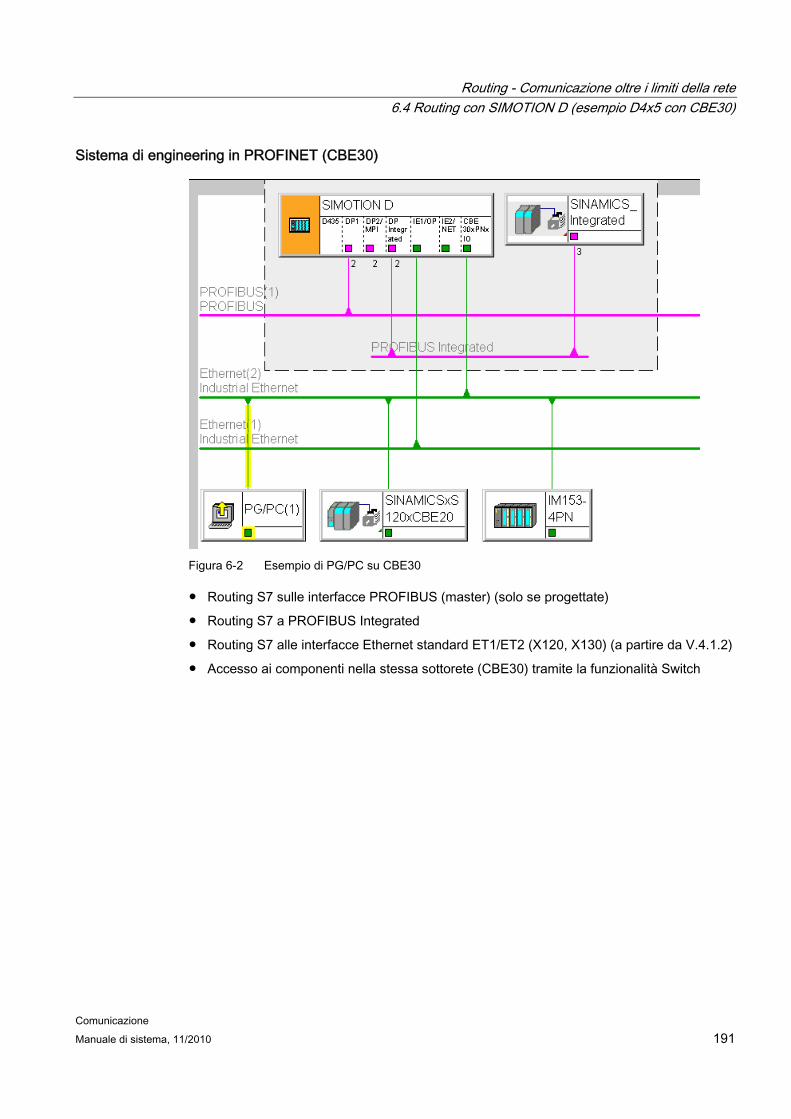
Routing - Comunicazione oltre i limiti della rete 6.4 Routing con SIMOTION D (esempio D4x5 con CBE30)
Comunicazione Manuale di sistema, 11/2010 191
Sistema di engineering in PROFINET (CBE30)
Figura 6-2 Esempio di PG/PC su CBE30
● Routing S7 sulle interfacce PROFIBUS (master) (solo se progettate)
● Routing S7 a PROFIBUS Integrated
● Routing S7 alle interfacce Ethernet standard ET1/ET2 (X120, X130) (a partire da V.4.1.2)
● Accesso ai componenti nella stessa sottorete (CBE30) tramite la funzionalità Switch
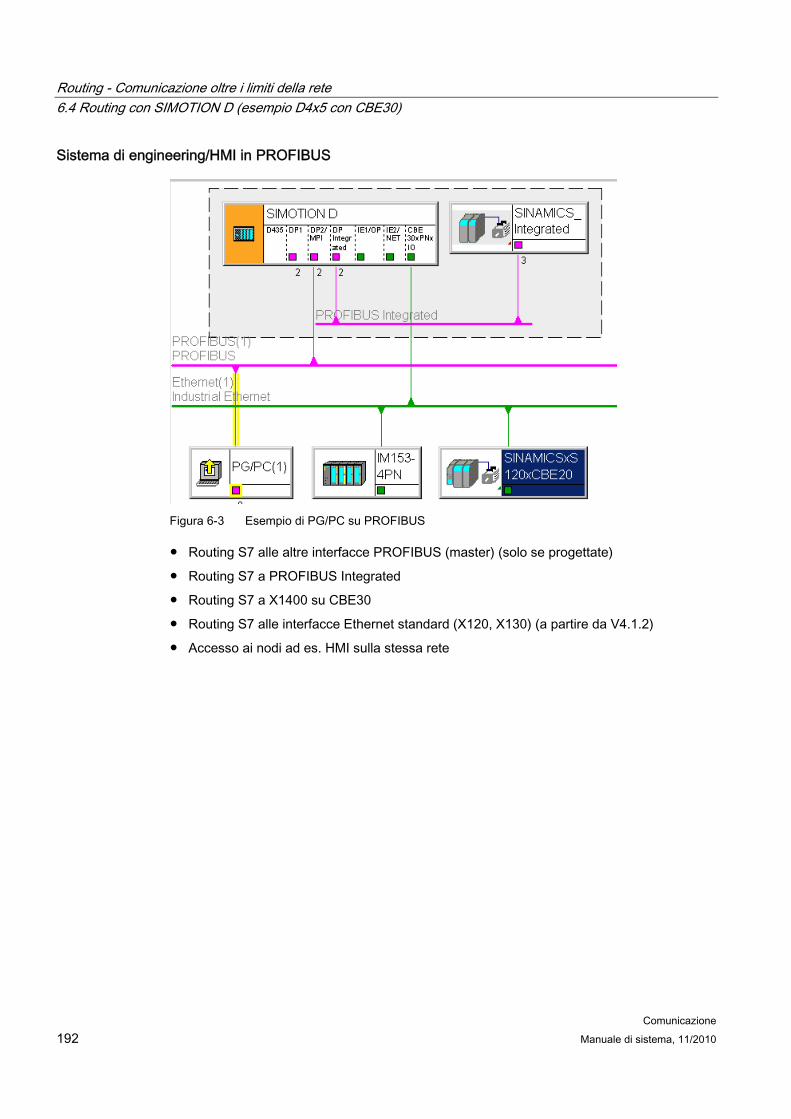
Routing - Comunicazione oltre i limiti della rete 6.4 Routing con SIMOTION D (esempio D4x5 con CBE30)
Comunicazione 192 Manuale di sistema, 11/2010
Sistema di engineering/HMI in PROFIBUS
Figura 6-3 Esempio di PG/PC su PROFIBUS
● Routing S7 alle altre interfacce PROFIBUS (master) (solo se progettate)
● Routing S7 a PROFIBUS Integrated
● Routing S7 a X1400 su CBE30
● Routing S7 alle interfacce Ethernet standard (X120, X130) (a partire da V4.1.2)
● Accesso ai nodi ad es. HMI sulla stessa rete
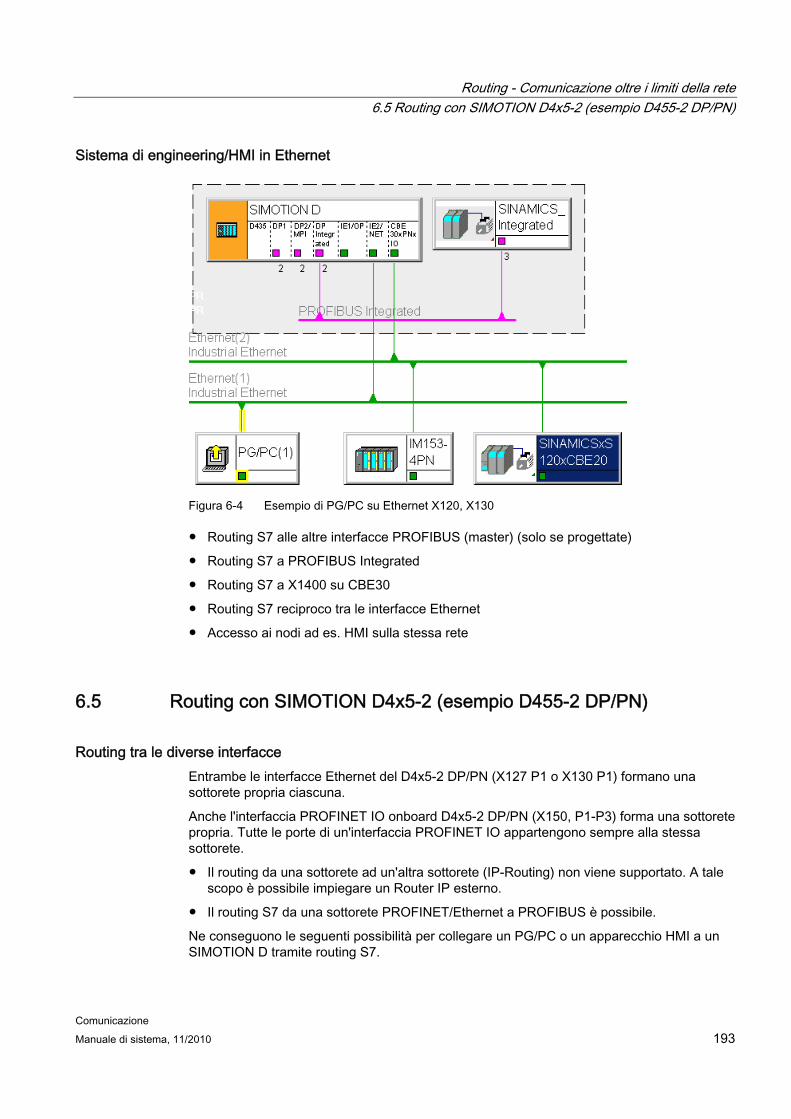
Routing - Comunicazione oltre i limiti della rete 6.5 Routing con SIMOTION D4x5-2 (esempio D455-2 DP/PN)
Comunicazione Manuale di sistema, 11/2010 193
Sistema di engineering/HMI in Ethernet
Figura 6-4 Esempio di PG/PC su Ethernet X120, X130
● Routing S7 alle altre interfacce PROFIBUS (master) (solo se progettate)
● Routing S7 a PROFIBUS Integrated
● Routing S7 a X1400 su CBE30
● Routing S7 reciproco tra le interfacce Ethernet
● Accesso ai nodi ad es. HMI sulla stessa rete
6.5 Routing con SIMOTION D4x5-2 (esempio D455-2 DP/PN)
Routing tra le diverse interfacce Entrambe le interfacce Ethernet del D4x5-2 DP/PN (X127 P1 o X130 P1) formano una sottorete propria ciascuna.
Anche l'interfaccia PROFINET IO onboard D4x5-2 DP/PN (X150, P1-P3) forma una sottorete propria. Tutte le porte di un'interfaccia PROFINET IO appartengono sempre alla stessa sottorete.
● Il routing da una sottorete ad un'altra sottorete (IP-Routing) non viene supportato. A tale scopo è possibile impiegare un Router IP esterno.
● Il routing S7 da una sottorete PROFINET/Ethernet a PROFIBUS è possibile.
Ne conseguono le seguenti possibilità per collegare un PG/PC o un apparecchio HMI a un SIMOTION D tramite routing S7.

Routing - Comunicazione oltre i limiti della rete 6.5 Routing con SIMOTION D4x5-2 (esempio D455-2 DP/PN)
Comunicazione 194 Manuale di sistema, 11/2010
Sistema di engineering/HMI in PROFINET
Figura 6-5 Esempio di PG/PC su interfaccia PROFINET (PNxIO, X150)
● Routing S7 sulle interfacce PROFIBUS (master) (solo se progettate)
● Routing S7 a PROFIBUS Integrated
● Routing S7 alle interfacce Ethernet PN/IE (X127 P1) e PN/IE-NET (X130 P1)
● Accesso ai componenti nella stessa sottorete tramite la funzionalità Switch dell'interfaccia PROFINET IO.
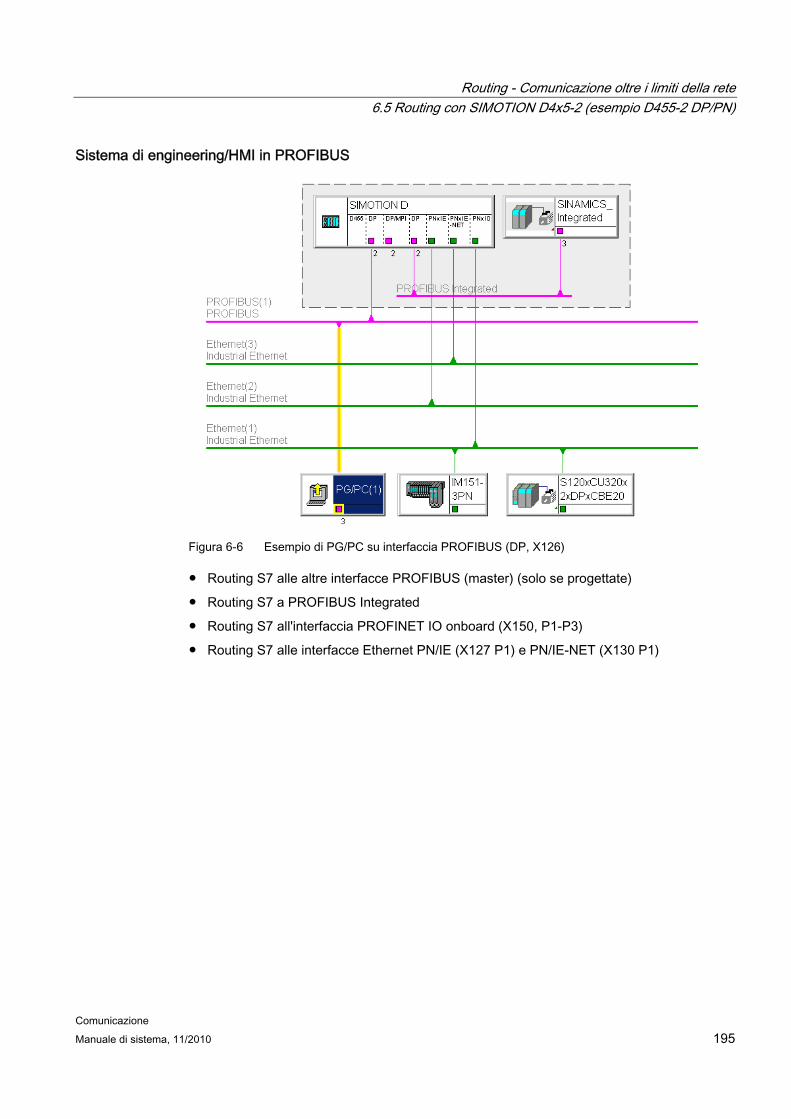
Routing - Comunicazione oltre i limiti della rete 6.5 Routing con SIMOTION D4x5-2 (esempio D455-2 DP/PN)
Comunicazione Manuale di sistema, 11/2010 195
Sistema di engineering/HMI in PROFIBUS
Figura 6-6 Esempio di PG/PC su interfaccia PROFIBUS (DP, X126)
● Routing S7 alle altre interfacce PROFIBUS (master) (solo se progettate)
● Routing S7 a PROFIBUS Integrated
● Routing S7 all'interfaccia PROFINET IO onboard (X150, P1-P3)
● Routing S7 alle interfacce Ethernet PN/IE (X127 P1) e PN/IE-NET (X130 P1)
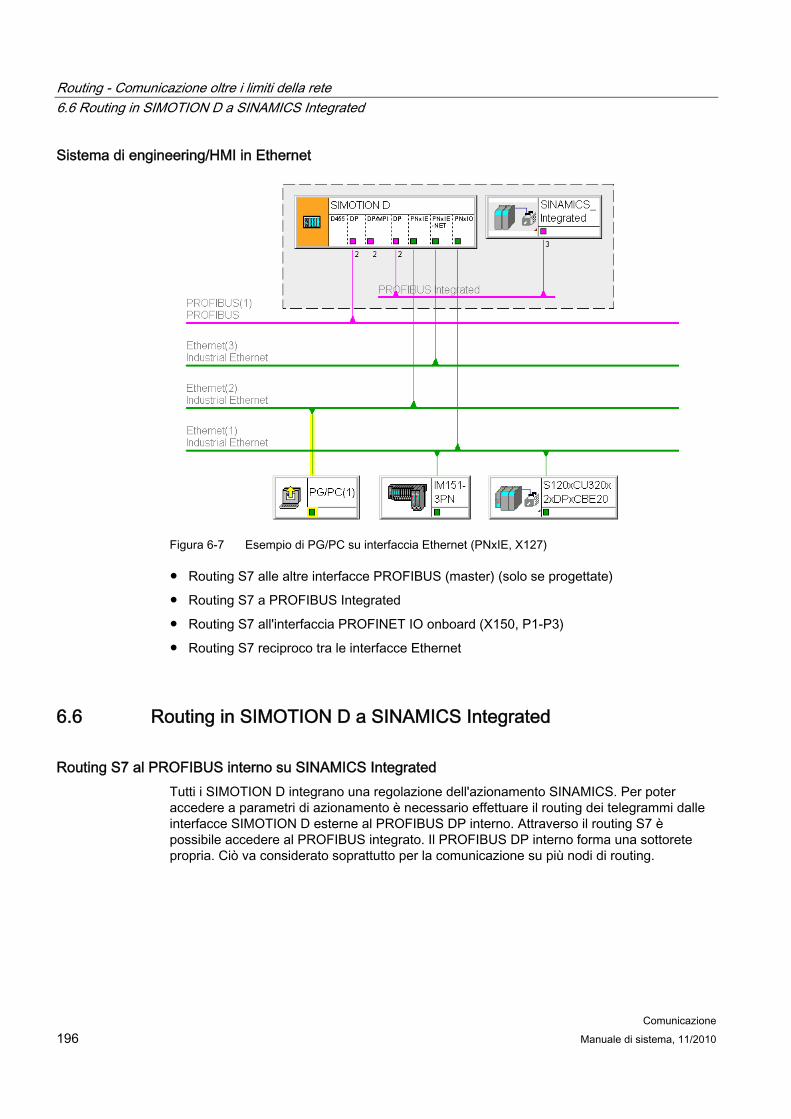
Routing - Comunicazione oltre i limiti della rete 6.6 Routing in SIMOTION D a SINAMICS Integrated
Comunicazione 196 Manuale di sistema, 11/2010
Sistema di engineering/HMI in Ethernet
Figura 6-7 Esempio di PG/PC su interfaccia Ethernet (PNxIE, X127)
● Routing S7 alle altre interfacce PROFIBUS (master) (solo se progettate)
● Routing S7 a PROFIBUS Integrated
● Routing S7 all'interfaccia PROFINET IO onboard (X150, P1-P3)
● Routing S7 reciproco tra le interfacce Ethernet
6.6 Routing in SIMOTION D a SINAMICS Integrated
Routing S7 al PROFIBUS interno su SINAMICS Integrated Tutti i SIMOTION D integrano una regolazione dell'azionamento SINAMICS. Per poter accedere a parametri di azionamento è necessario effettuare il routing dei telegrammi dalle interfacce SIMOTION D esterne al PROFIBUS DP interno. Attraverso il routing S7 è possibile accedere al PROFIBUS integrato. Il PROFIBUS DP interno forma una sottorete propria. Ciò va considerato soprattutto per la comunicazione su più nodi di routing.
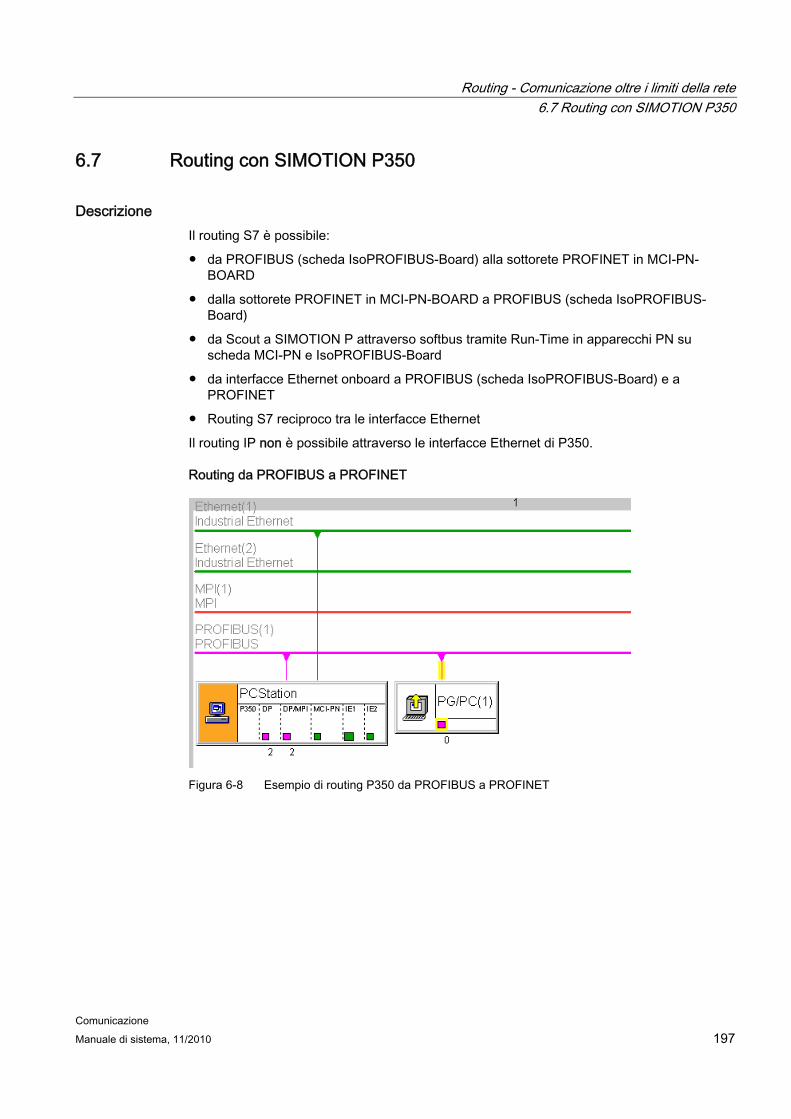
Routing - Comunicazione oltre i limiti della rete 6.7 Routing con SIMOTION P350
Comunicazione Manuale di sistema, 11/2010 197
6.7 Routing con SIMOTION P350
Descrizione Il routing S7 è possibile:
● da PROFIBUS (scheda IsoPROFIBUS-Board) alla sottorete PROFINET in MCI-PN-BOARD
● dalla sottorete PROFINET in MCI-PN-BOARD a PROFIBUS (scheda IsoPROFIBUS-Board)
● da Scout a SIMOTION P attraverso softbus tramite Run-Time in apparecchi PN su scheda MCI-PN e IsoPROFIBUS-Board
● da interfacce Ethernet onboard a PROFIBUS (scheda IsoPROFIBUS-Board) e a PROFINET
● Routing S7 reciproco tra le interfacce Ethernet
Il routing IP non è possibile attraverso le interfacce Ethernet di P350.
Routing da PROFIBUS a PROFINET
Figura 6-8 Esempio di routing P350 da PROFIBUS a PROFINET

Routing - Comunicazione oltre i limiti della rete 6.7 Routing con SIMOTION P350
Comunicazione 198 Manuale di sistema, 11/2010
Routing da PROFINET a PROFIBUS
Figura 6-9 Esempio di routing P350 da PROFINET a PROFIBUS
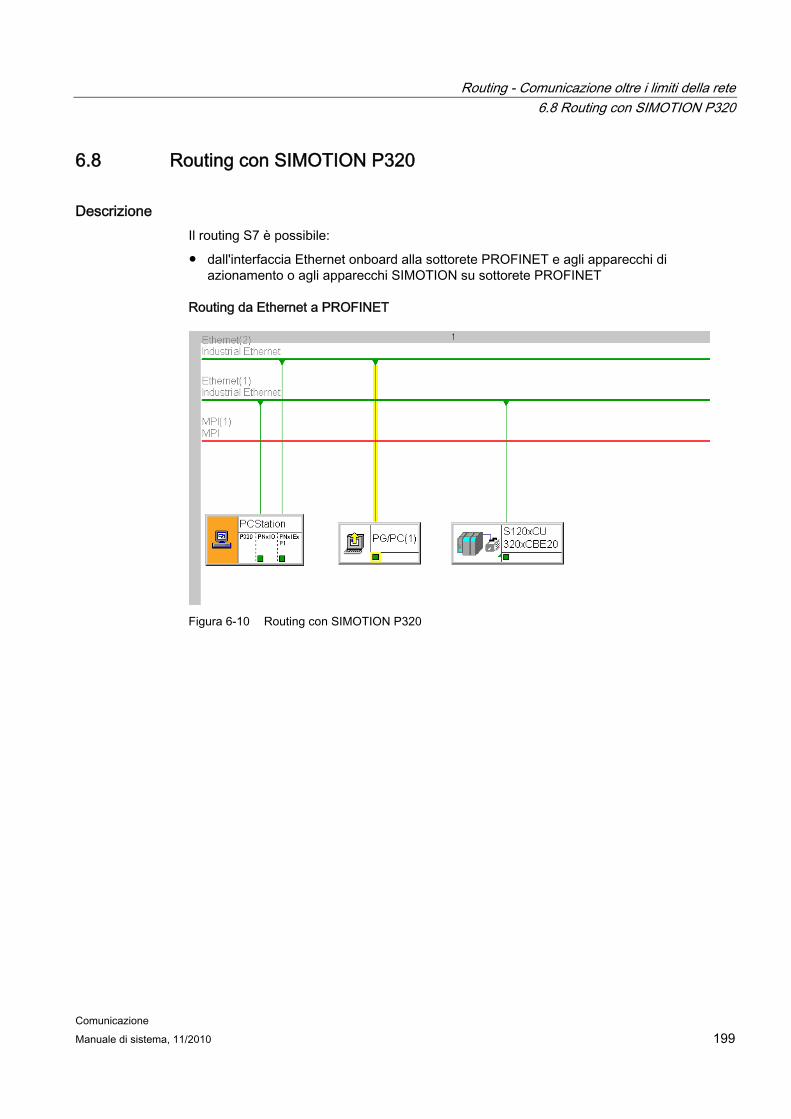
Routing - Comunicazione oltre i limiti della rete 6.8 Routing con SIMOTION P320
Comunicazione Manuale di sistema, 11/2010 199
6.8 Routing con SIMOTION P320
Descrizione Il routing S7 è possibile:
● dall'interfaccia Ethernet onboard alla sottorete PROFINET e agli apparecchi di azionamento o agli apparecchi SIMOTION su sottorete PROFINET
Routing da Ethernet a PROFINET
Figura 6-10 Routing con SIMOTION P320

Routing - Comunicazione oltre i limiti della rete 6.8 Routing con SIMOTION P320
Comunicazione 200 Manuale di sistema, 11/2010
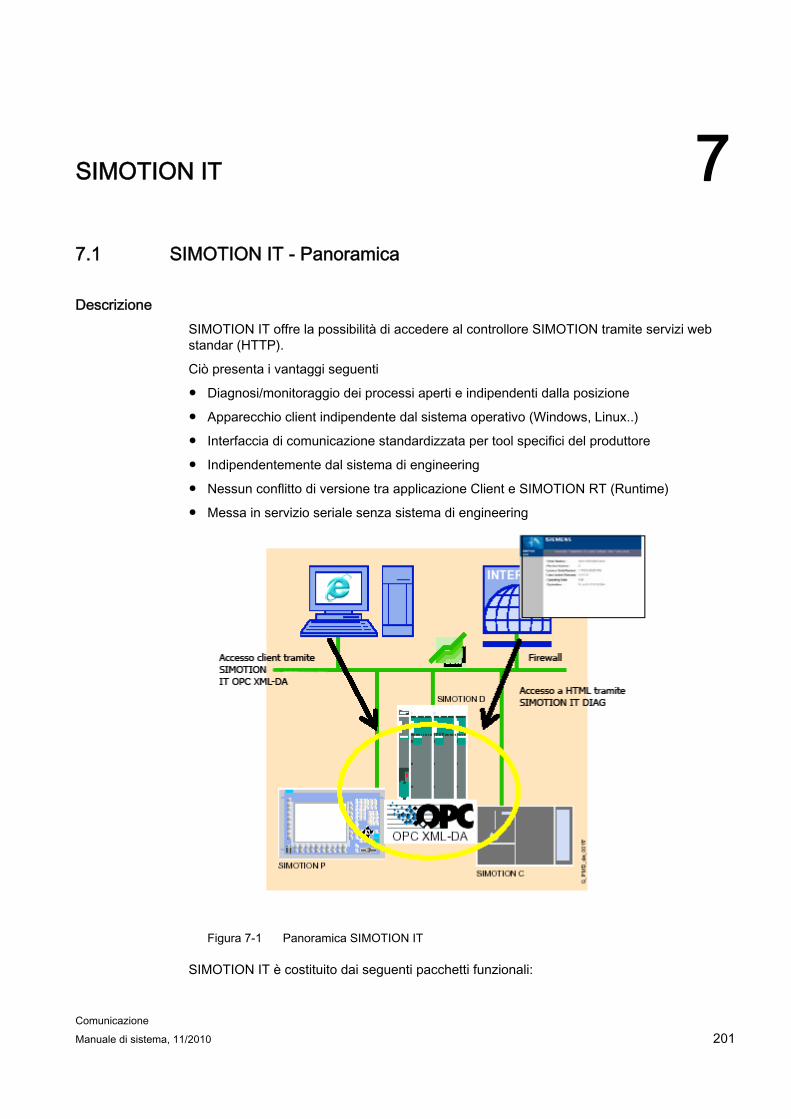
Comunicazione Manuale di sistema, 11/2010 201
SIMOTION IT 77.1 SIMOTION IT - Panoramica
Descrizione SIMOTION IT offre la possibilità di accedere al controllore SIMOTION tramite servizi web standar (HTTP).
Ciò presenta i vantaggi seguenti
● Diagnosi/monitoraggio dei processi aperti e indipendenti dalla posizione
● Apparecchio client indipendente dal sistema operativo (Windows, Linux..)
● Interfaccia di comunicazione standardizzata per tool specifici del produttore
● Indipendentemente dal sistema di engineering
● Nessun conflitto di versione tra applicazione Client e SIMOTION RT (Runtime)
● Messa in servizio seriale senza sistema di engineering
Figura 7-1 Panoramica SIMOTION IT
SIMOTION IT è costituito dai seguenti pacchetti funzionali:
SIMOTION IT 7.1 SIMOTION IT - Panoramica
Comunicazione 202 Manuale di sistema, 11/2010
● SIMOTION IT DIAG
● SIMOTION IT OPC XML - DA
● Trace via SOAP
● Download dei file tramite FTP (File Transfer Protocol)
● SIMOTION IT Virtual Machine
Ulteriore documentazione Una descrizione dettagliata dei prodotti SIMOTION IT è disponibile nelle informazioni sul prodottoFunzioni di diagnostica e HMI basate su SIMOTION IT Ethernet sul DVD della documentazione di SIMOTION SCOUT.
Informazioni ulteriori su SIMOTION VM si trovano nel manuale di programmazione SIMOTION – IT Virtual Machine.
Vedere anche Accesso web a SIMOTION (Pagina 203)
SIMOTION IT DIAG (Pagina 204)
SIMOTION IT OPC XML-DA (Pagina 206)
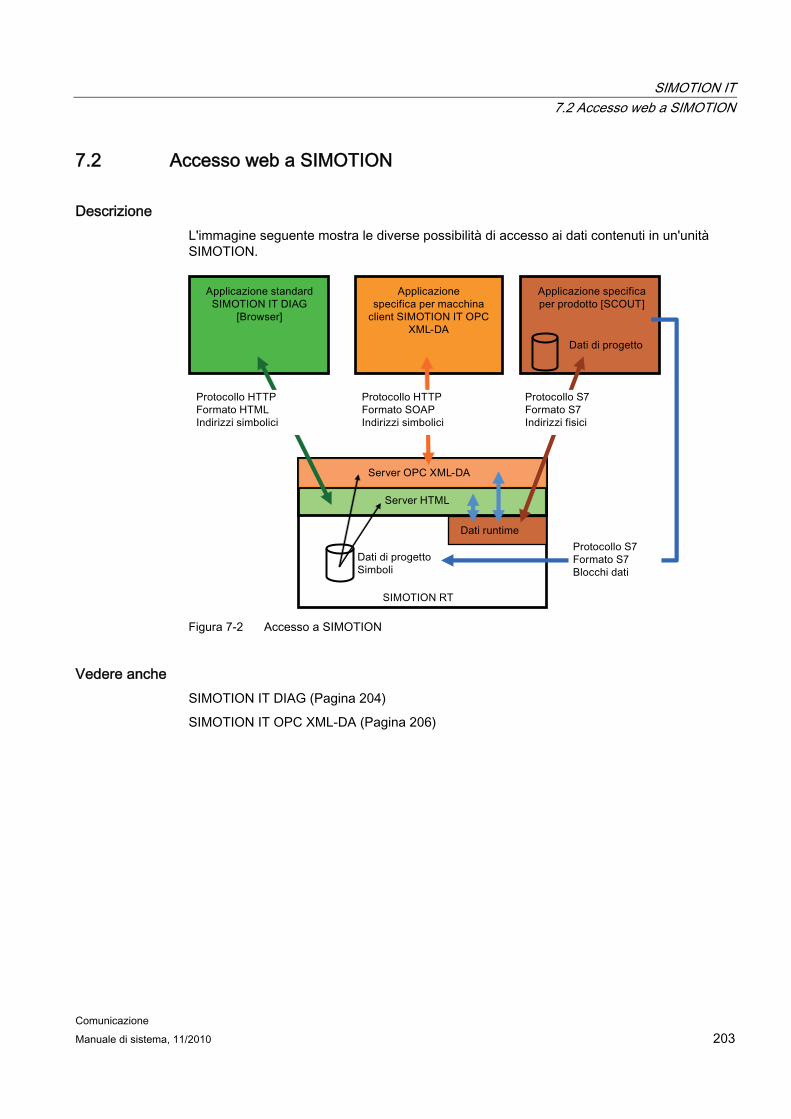
SIMOTION IT 7.2 Accesso web a SIMOTION
Comunicazione Manuale di sistema, 11/2010 203
7.2 Accesso web a SIMOTION
Descrizione L'immagine seguente mostra le diverse possibilità di accesso ai dati contenuti in un'unità SIMOTION.
Figura 7-2 Accesso a SIMOTION
Vedere anche SIMOTION IT DIAG (Pagina 204)
SIMOTION IT OPC XML-DA (Pagina 206)
SIMOTION IT 7.3 SIMOTION IT DIAG
Comunicazione 204 Manuale di sistema, 11/2010
7.3 SIMOTION IT DIAG
Descrizione SIMOTION IT DIAG offre la possibilità di accedere da un PC alle pagine HTML in SIMOTION con un qualsiasi browser Internet.
Pagine di diagnostica standard SIMOTION offre le seguenti pagine di diagnostica standard:
● Pagina iniziale
● Device Info/IP-Config (informazioni su firmware, apparecchi, componenti degli apparecchi, pacchetti tecnologici e dati dell'interfaccia Ethernet dell'apparecchio SIMOTION)
● Diagnostics (grado di utilizzo della CPU, occupazione della memoria, stato operativo, visualizzazione runtime del task, trace per apparecchi e sistemi, panoramica del servizio).
● Message&Logs (buffer di diagnostica, allarmi SIMOTION e Drives, Syslog e Userlog)
● Machine Overview (moduli e topologia di una macchina nonché informazioni sulla configurazione hardware)
● Manage Config (caricamento dati di configurazione IT DIAG, update Device, salvataggio dati dell'apparecchio)
● Settings (impostazione del fuso orario, attivazione degli stati operativi, modifica della visualizzazione di pagine definite dall'utente)
● Files (accesso al file system SIMOTION, upload e download di file, creazione di cartelle e salvataggio di ulteriori dati, ad es. documentazione)
Pagine standard semplificate Per la rappresentazione ottimizzata di pagine IT DIAG su apparecchi quali telefoni cellulari o PDA, a partire dalla versione 4.1.3 è disponibile una serie di pagine speciali, contenenti le informazioni delle pagine standard con una rappresentazione semplificata. Alla pagina iniziale delle pagine standard semplificate si giunge tramite l'indirizzo http://<IPAddr>/BASIC.
Configurazione tramite WebCfg.xml Ci sono due file con i quali è possibile configurare IT DIAG:
● WebCfg.xml
● WebCfgFrame.xml
SIMOTION IT 7.3 SIMOTION IT DIAG
Comunicazione Manuale di sistema, 11/2010 205
Tramite il file di configurazione WebCfg.xml vengono configurate tutte le impostazioni rilevanti per l'utente nel server Web. Il file WebCfgFrame.xml contiene le impostazioni IT DIAG del produttore.
Pagine definite dall'utente SIMOTION IT DIAG offre la possibilità di integrare pagine Web configurate individualmente. Per l'accesso alle variabili SIMOTION sono disponibili due meccanismi:
● le librerie Javascript opcxml.js e appl.js
● il MiniWeb Server Language (MWSL)
Le pagine definite dall'utente possono essere rappresentate nell'area "User´s Area". Per tale scopo devono essere salvate nella cartella FILES del file system SIMOTION.
Trace via SOAP Il WebTrace è identico al trace di SIMOTION SCOUT. L'unica differenza consiste nell'output del formato dati.
Il pacchetto funzionale "Trace via SOAP" consente di scrivere le variabili SIMOTION in un buffer. I valori vengono raggruppati in un file e possono essere prelevati in modo asincrono tramite richiesta HTTP. L'utilizzo di questa interfaccia richiede di norma un'applicazione come client.
Il trace può essere parametrizzato tramite interfaccia web e la registrazione può essere subito considerata tramite un TraceViewer.
Accesso alle variabili L'accesso alle variabili per le applicazioni SIMOTION IT avviene tramite un provider delle variabili. Attualmente esistono quattro provider delle variabili.
● MinWeb
● SIMOTION
● SIMOTION diagnostics
● UserConfig
È possibile accedere alle variabili seguenti:
● Variabile di sistema Device
● Variabile di sistema TO
● Variabili Unit globali dalla sezione Interface
● Dati di configurazione TO
● a partire da 4.2 anche variabili globali dell'apparecchio e variabili I/O
● Parametro azionamento
● Impostazione dello stato operativo, esecuzione di RamToRom, esecuzione di ActiveToRom
SIMOTION IT 7.4 SIMOTION IT OPC XML-DA
Comunicazione 206 Manuale di sistema, 11/2010
● Allarmi tecnologici
● buffer diagnostico
Collegamento HTTPS sicuro Il protocollo Secure Socket Layer (SSL) rende possibile la trasmissione crittografata dei dati tra un client e l'apparecchio SIMOTION. Il protocollo Secure Socket Layer costituisce la base per gli accessi HTTPS. L'accesso crittografato può avvenire sia tramite SIMOTION IT OPC-XML-DA sia tramite SIMOTION IT DIAG.
7.4 SIMOTION IT OPC XML-DA
Descrizione Il server SIMOTION IT OPC XML-DA consente di accedere via Ethernet ai dati e agli stati operativi dell'apparecchio SIMOTION. A partire da V4.2 per SIMOTION IT OPC XML-DA non è più necessaria una licenza propria.
OPC è l'acronimo di "open connectivity" e definisce un'interfaccia standard per la comunicazione nella tecnica di automazione. Con OPC XML-DA è possibile comunicare con un PLC mediante telegrammi standard basati su Ethernet. Per la trasmissione dei comandi viene utilizzato il protocollo di comunicazione SOAP (simple object access protocol).
Un'applicazione specifica del cliente creata su PC client e programmata ad es. con il linguaggio di programmazione C#, Visual Basic o Java, utilizza i servizi e le proprietà di SIMOTION IT OPC XML-DA:
● Comunicazione aperta tramite HTTP, SOAP, OPC-XML tra client e apparecchio SIMOTION.
● Si fonda sulla specifica OPC XML DA 1.0 della base OPC
● Accesso alle variabili SIMOTION
– Lettura/scrittura
– Lettura ciclica subscription
– Navigazione
● Trace via SOAP; questa funzione è un ampliamento della specifica OPC
● Client su qualsiasi HW con diversi sistemi operativi (Windows, Linux, ...)
● Creazione di applicazioni client con C#, Java, C++. Per accedere all'applicazione tramite il server SIMOTION OPC XML-DA è necessario procedere autonomamente all'implementazione.
● Protezione d'accesso tramite gruppi utenti, riconoscimento dell'utente e password
L'immagine seguente mostra in forma schematica l'accesso al server OPC XML-DA.
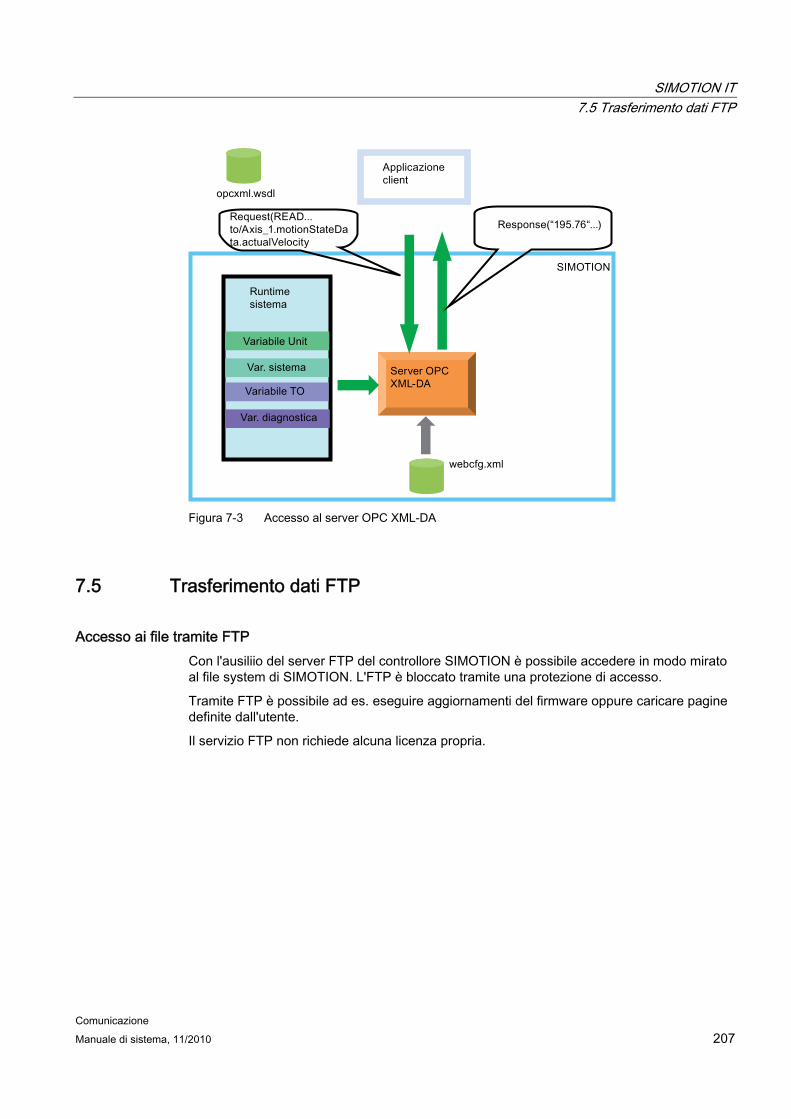
SIMOTION IT 7.5 Trasferimento dati FTP
Comunicazione Manuale di sistema, 11/2010 207
Figura 7-3 Accesso al server OPC XML-DA
7.5 Trasferimento dati FTP
Accesso ai file tramite FTP Con l'ausiliio del server FTP del controllore SIMOTION è possibile accedere in modo mirato al file system di SIMOTION. L'FTP è bloccato tramite una protezione di accesso.
Tramite FTP è possibile ad es. eseguire aggiornamenti del firmware oppure caricare pagine definite dall'utente.
Il servizio FTP non richiede alcuna licenza propria.

SIMOTION IT 7.5 Trasferimento dati FTP
Comunicazione 208 Manuale di sistema, 11/2010
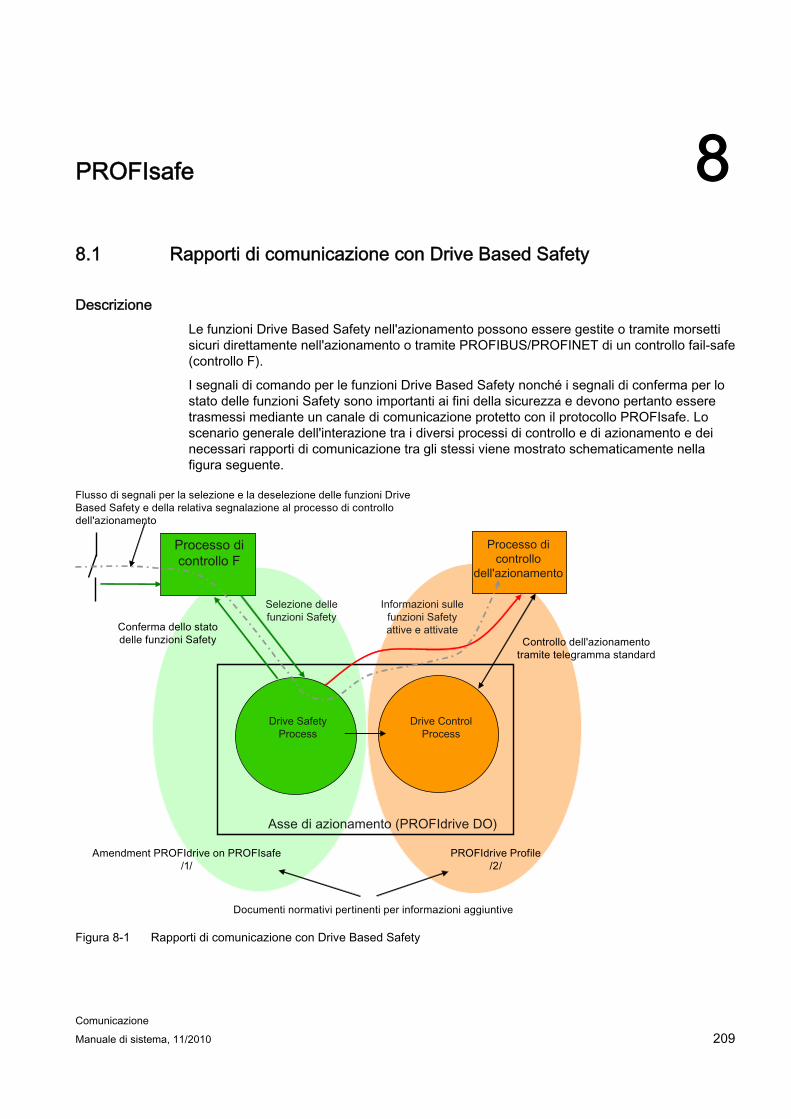
Comunicazione Manuale di sistema, 11/2010 209
PROFIsafe 88.1 Rapporti di comunicazione con Drive Based Safety
Descrizione Le funzioni Drive Based Safety nell'azionamento possono essere gestite o tramite morsetti sicuri direttamente nell'azionamento o tramite PROFIBUS/PROFINET di un controllo fail-safe (controllo F).
I segnali di comando per le funzioni Drive Based Safety nonché i segnali di conferma per lo stato delle funzioni Safety sono importanti ai fini della sicurezza e devono pertanto essere trasmessi mediante un canale di comunicazione protetto con il protocollo PROFIsafe. Lo scenario generale dell'interazione tra i diversi processi di controllo e di azionamento e dei necessari rapporti di comunicazione tra gli stessi viene mostrato schematicamente nella figura seguente.
Figura 8-1 Rapporti di comunicazione con Drive Based Safety

PROFIsafe 8.1 Rapporti di comunicazione con Drive Based Safety
Comunicazione 210 Manuale di sistema, 11/2010
Le interfacce del "Drive Safety Process" per il controllo F e per il controllo dell'azionamento sono di tipo PROFIdrive e la loro funzionalità è definita in /1/ e /2/.
L'introduzione e il monitoraggio di una funzione Drive Based Safety avvengono attraverso il controllo F, mediante il canale di trasmissione protetto con PROFIsafe che va dal controllo F all'azionamento (asse di azionamento). I rispettivi stati delle funzioni Drive Based Safety nell'azionamento hanno ripercussioni anche sull'interfaccia dell'azionamento, in quanto per alcune funzioni Drive Based Safety la priorità tra il controllo dell'azionamento e il processo Drive Safety varia.
Per il coordinamento effettivo di controllo F e controllo dell'azionamento è pertanto necessario un canale informativo supplementare, che va dal "Drive Safety Process" al controllo dell'azionamento, affinché il controllo dell'azionamento possa reagire in modo appropriato alle funzioni Drive Based Safety desiderate o attivate.
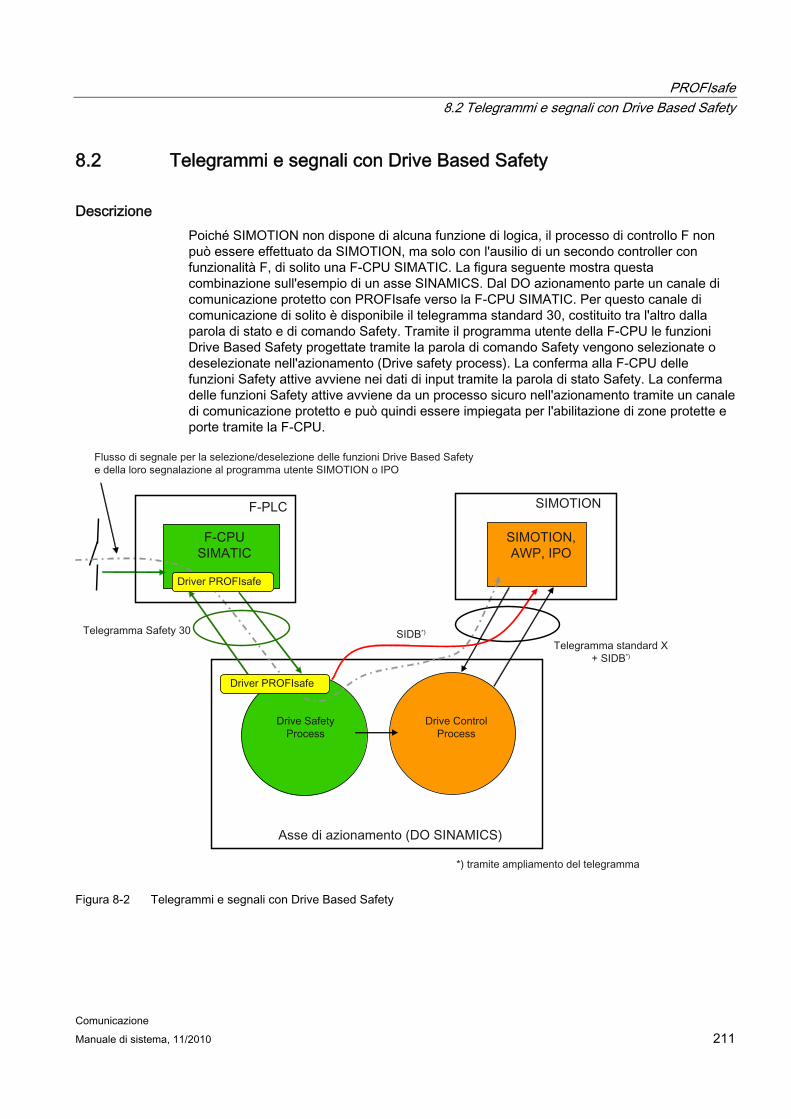
PROFIsafe 8.2 Telegrammi e segnali con Drive Based Safety
Comunicazione Manuale di sistema, 11/2010 211
8.2 Telegrammi e segnali con Drive Based Safety
Descrizione Poiché SIMOTION non dispone di alcuna funzione di logica, il processo di controllo F non può essere effettuato da SIMOTION, ma solo con l'ausilio di un secondo controller con funzionalità F, di solito una F-CPU SIMATIC. La figura seguente mostra questa combinazione sull'esempio di un asse SINAMICS. Dal DO azionamento parte un canale di comunicazione protetto con PROFIsafe verso la F-CPU SIMATIC. Per questo canale di comunicazione di solito è disponibile il telegramma standard 30, costituito tra l'altro dalla parola di stato e di comando Safety. Tramite il programma utente della F-CPU le funzioni Drive Based Safety progettate tramite la parola di comando Safety vengono selezionate o deselezionate nell'azionamento (Drive safety process). La conferma alla F-CPU delle funzioni Safety attive avviene nei dati di input tramite la parola di stato Safety. La conferma delle funzioni Safety attive avviene da un processo sicuro nell'azionamento tramite un canale di comunicazione protetto e può quindi essere impiegata per l'abilitazione di zone protette e porte tramite la F-CPU.
Figura 8-2 Telegrammi e segnali con Drive Based Safety
PROFIsafe 8.3 Funzioni F-Proxy di SIMOTION
Comunicazione 212 Manuale di sistema, 11/2010
Parallelamente al controllo delle funzioni Safety nell'azionamento tramite il canale PROFIsafe esiste un ulteriore canale opzionale per le informazioni Safety (SIDB Safety Data Block), mediante il quale vengono trasmessi gli stati di attivazione e status delle funzioni Drive Based Safety dall'azionamento a SIMOTION. Questo canale di informazioni non è protetto e nella pratica viene realizzato tramite un prolungamento del telegramma standard corrispondente al blocco di dati SIDB. Scopo del canale di informazioni Safety è l'integrazione opzionale del controllo del movimento dell'azionamento (IPO, SERVO) nonché dell'intero programma utente (AWP) nel processo delle funzioni Drive Based Safety, avente priorità più elevata, nonché del programma utente del controllore F. Reazioni tipiche in SIMOTION sono ad es.:
● Riconoscimento di un'azione autonoma dell'azionamento funzionale alle caratteristiche Safety (ad es. rampa di frenata per SS1 e SS2 e passaggio al funzionamento a seguire).
● Riconoscimento della selezione di una funzione Safety e conseguente reazione di SIMOTION programmata alla funzione Safety selezionata (ad es. rampa di frenata o diminuzione della velocità in base al controllo per SOS e SLS).
8.3 Funzioni F-Proxy di SIMOTION
Descrizione Per il collegamento PROFIsafe degli azionamenti integrati di SIMOTION D, nonché di azionamenti SINAMICS, controllati da SIMOTION ma ad es. posti in un dominio di comunicazione diverso dalla F-CPU, SIMOTION dispone di una funzionalità F-Proxy integrata. F-Proxy consente una trasmissione trasparente dei telegrammi Safety dall'interfaccia I-Slave o I-Device SIMOTION alla relativa interfaccia Master o Controller SIMOTION in cui è progettato l'azionamento. Nonostante la funzione di trasmissione di SIMOTION, la comunicazione PROFIsafe tra F-CPU e azionamento è garantita, poiché i driver PROFIsafe sorvegliano in modo sicuro la comunicazione nelle estremità (F-CPU, azionamento).
Per l'utilizzo della funzionalità F-Proxy è necessario progettare separatamente le due tratte di comunicazione dalla F-CPU a SIMOTION e da SIMOTION all'azionamento.
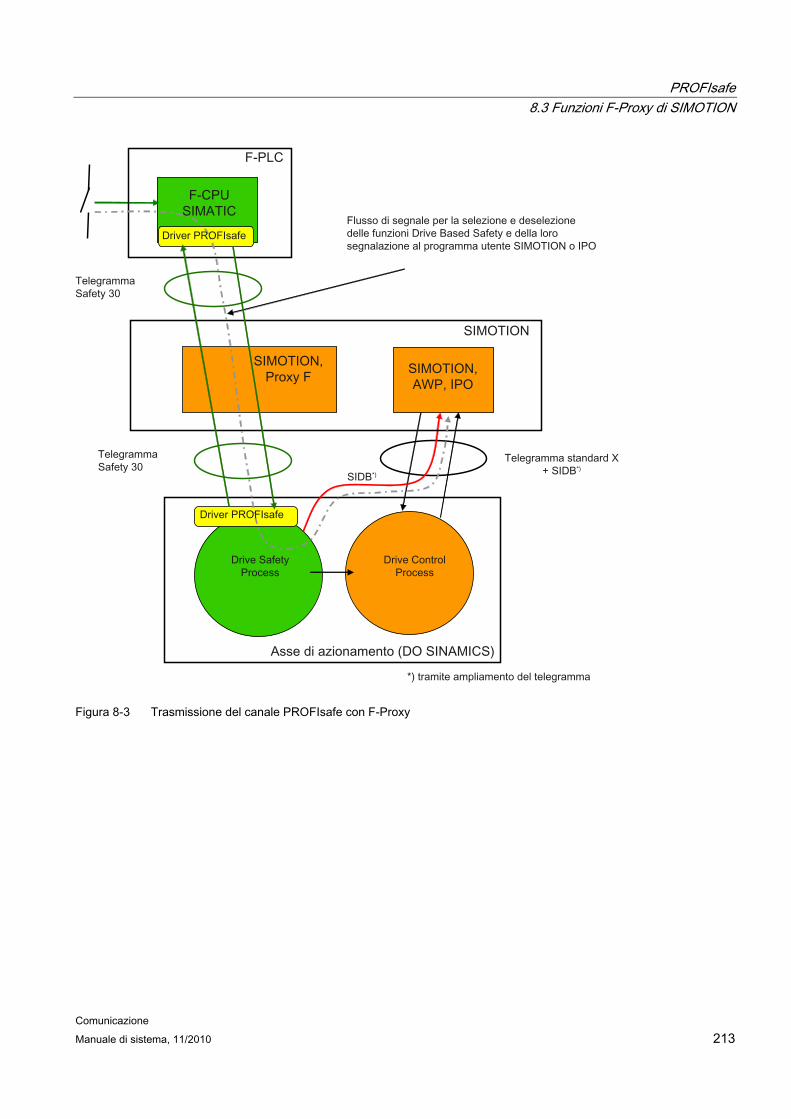
PROFIsafe 8.3 Funzioni F-Proxy di SIMOTION
Comunicazione Manuale di sistema, 11/2010 213
Figura 8-3 Trasmissione del canale PROFIsafe con F-Proxy
PROFIsafe 8.4 Caratteristiche di PROFIsafe durante la progettazione
Comunicazione 214 Manuale di sistema, 11/2010
8.4 Caratteristiche di PROFIsafe durante la progettazione
Meccanismi in PROFIsafe Fondamentalmente la comunicazione PROFIsafe può avvenire sia tramite PROFINET sia tramite PROFIBUS. A riguardo sono disponibili i meccanismi del proxy F o una variante a traffico trasversale.
Uguale per tutti i meccanismi è il fatto che i dati F vengono gestiti dalla F-CPU ed i dati Motion Control dalla SIMOTION CPU. Le caratteristiche necessarie del PROFIsafe vengono impostate in Config HW con i parametri F.
Nota
Per i progetti SIMOTION (versione RT) < V4.2 la comunicazione PROFIsafe salvata è possibile soltanto tramite PROFIBUS. Con apparecchi SIMOTION < V4.2 con interfacce PROFIBUS e PROFINET è pertanto possibile realizzare PROFIsafe soltanto tramite l'interfaccia PROFIBUS ed i task Motion Control ad es. tramite l'interfaccia PROFINET. Il funzionamento misto (gestione movimenti tramite PROFINET e PROFIsafe tramite PROFIBUS) è tuttavia possibile solo con azionamenti SIMOTION D integrati, con l'impiego diazionamenti esterni (ad es. S120 CU320-2) su una CPU SIMOTION ciò non è consentito.
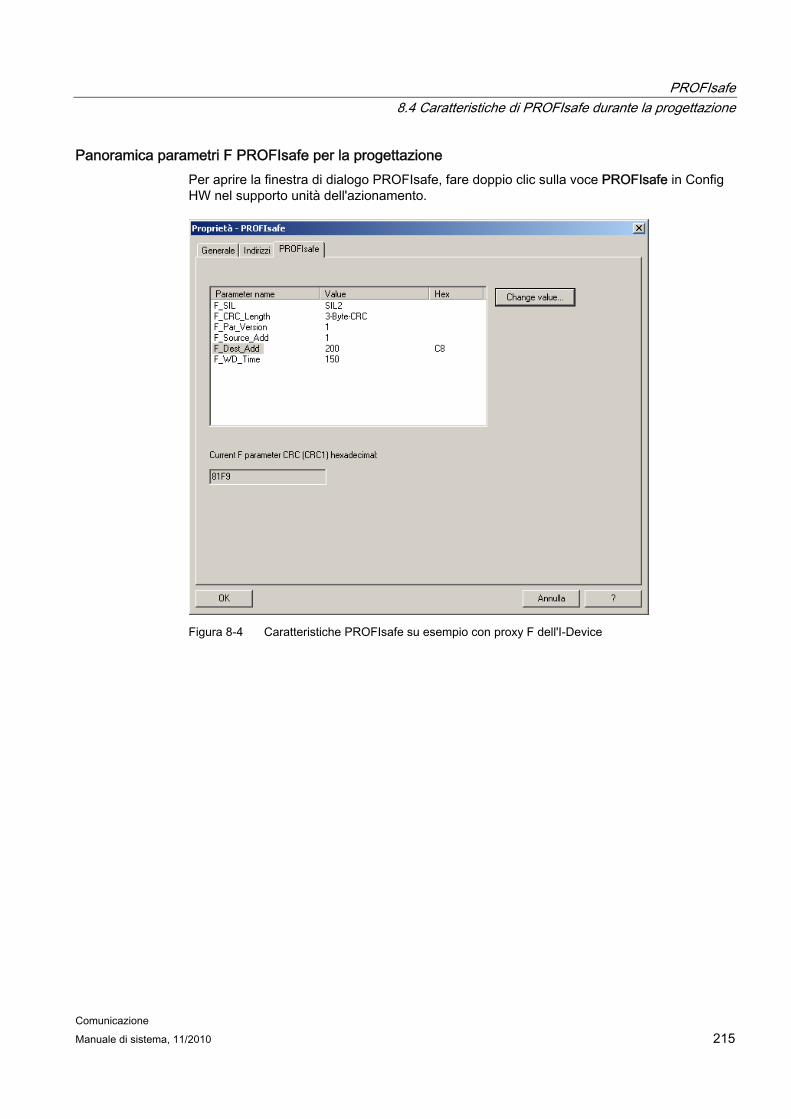
PROFIsafe 8.4 Caratteristiche di PROFIsafe durante la progettazione
Comunicazione Manuale di sistema, 11/2010 215
Panoramica parametri F PROFIsafe per la progettazione Per aprire la finestra di dialogo PROFIsafe, fare doppio clic sulla voce PROFIsafe in Config HW nel supporto unità dell'azionamento.
Figura 8-4 Caratteristiche PROFIsafe su esempio con proxy F dell'I-Device
PROFIsafe 8.4 Caratteristiche di PROFIsafe durante la progettazione
Comunicazione 216 Manuale di sistema, 11/2010
F_CRC_Length e F_Par_Version
Caratterizza accanto alla lunghezza dei dati utili F anche la modalità MODE PROFIsafe.
● PROFIsafe V1-MODE
F_CRC_Length = 2 fino alla lunghezza dei dati utili 12 byte
F_CRC_Length = 3 a partire dalla lunghezza dei dati utili 13 byte
F_Par_Version = 0
● PROFIsafe V2-MODE
F_CRC_Length = 3 fino alla lunghezza dei dati utili 12 byte
F_CRC_Length = 4 a partire dalla lunghezza dei dati utili 13 byte
F_Par_Version = 1
Nota
PROFIsafe V2-Mode non viene supportato da tutti gli apparecchi o versioni del firmware. Verificare prima della progettazione quale modalità da quale versione è possibile.
SINAMICS G120 CU240D DP F e SINAMICS G120 CU240S DP F supportano V2-Mode solo a partire dalla versione firmware V3.2.
F_Dest_Add: 1-65534 F_Dest_Add definisce l'indirizzo di destinazione PROFIsafe dell'oggetto di azionamento. Il valore può essere uno qualsiasi all'interno dell'intervallo, ma deve essere reimmesso manualmente nella progettazione Safety dell'azionamento nell'apparecchio di azionamento SINAMICS oppure nella configurazione di Safety Integrated (parametri dell'azionamento p9610/p9810).
F_WD_Time: 10- 65535 All'interno del tempo di sorveglianza deve pervenire dalla F-CPU un telegramma di sicurezza attuale valido. In caso contrario, l'azionamento passa ad uno stato sicuro. La durata del tempo di sorveglianza deve essere scelta in modo tale che i ritardi dei telegrammi vengano tollerati dalla comunicazione, ma che in caso di guasto (ad es. interruzione del collegamento della comunicazione) la reazione al guasto venga eseguita con il più rapidamente possibile.
Per ulteriori informazioni relative ai parametri F si rimanda alla Guida in linea della finestra di dialogo PROFIsafe.
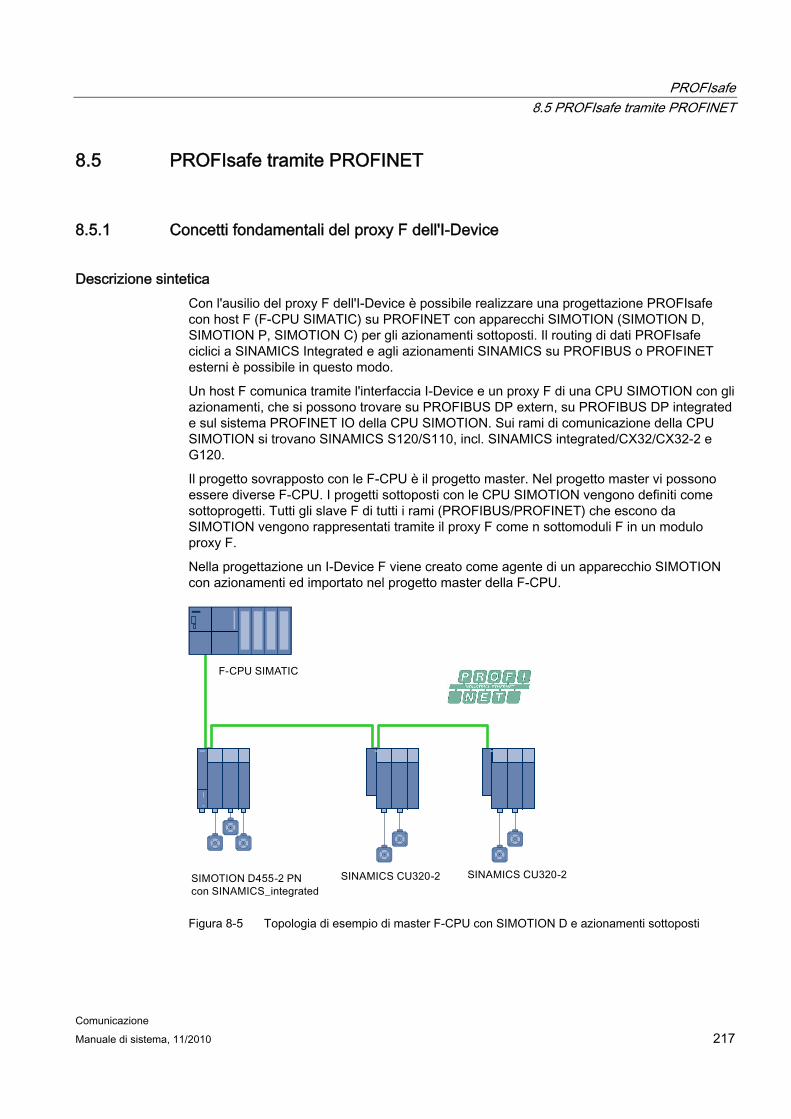
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 217
8.5 PROFIsafe tramite PROFINET
8.5.1 Concetti fondamentali del proxy F dell'I-Device
Descrizione sintetica Con l'ausilio del proxy F dell'I-Device è possibile realizzare una progettazione PROFIsafe con host F (F-CPU SIMATIC) su PROFINET con apparecchi SIMOTION (SIMOTION D, SIMOTION P, SIMOTION C) per gli azionamenti sottoposti. Il routing di dati PROFIsafe ciclici a SINAMICS Integrated e agli azionamenti SINAMICS su PROFIBUS o PROFINET esterni è possibile in questo modo.
Un host F comunica tramite l'interfaccia I-Device e un proxy F di una CPU SIMOTION con gli azionamenti, che si possono trovare su PROFIBUS DP extern, su PROFIBUS DP integrated e sul sistema PROFINET IO della CPU SIMOTION. Sui rami di comunicazione della CPU SIMOTION si trovano SINAMICS S120/S110, incl. SINAMICS integrated/CX32/CX32-2 e G120.
Il progetto sovrapposto con le F-CPU è il progetto master. Nel progetto master vi possono essere diverse F-CPU. I progetti sottoposti con le CPU SIMOTION vengono definiti come sottoprogetti. Tutti gli slave F di tutti i rami (PROFIBUS/PROFINET) che escono da SIMOTION vengono rappresentati tramite il proxy F come n sottomoduli F in un modulo proxy F.
Nella progettazione un I-Device F viene creato come agente di un apparecchio SIMOTION con azionamenti ed importato nel progetto master della F-CPU.
Figura 8-5 Topologia di esempio di master F-CPU con SIMOTION D e azionamenti sottoposti
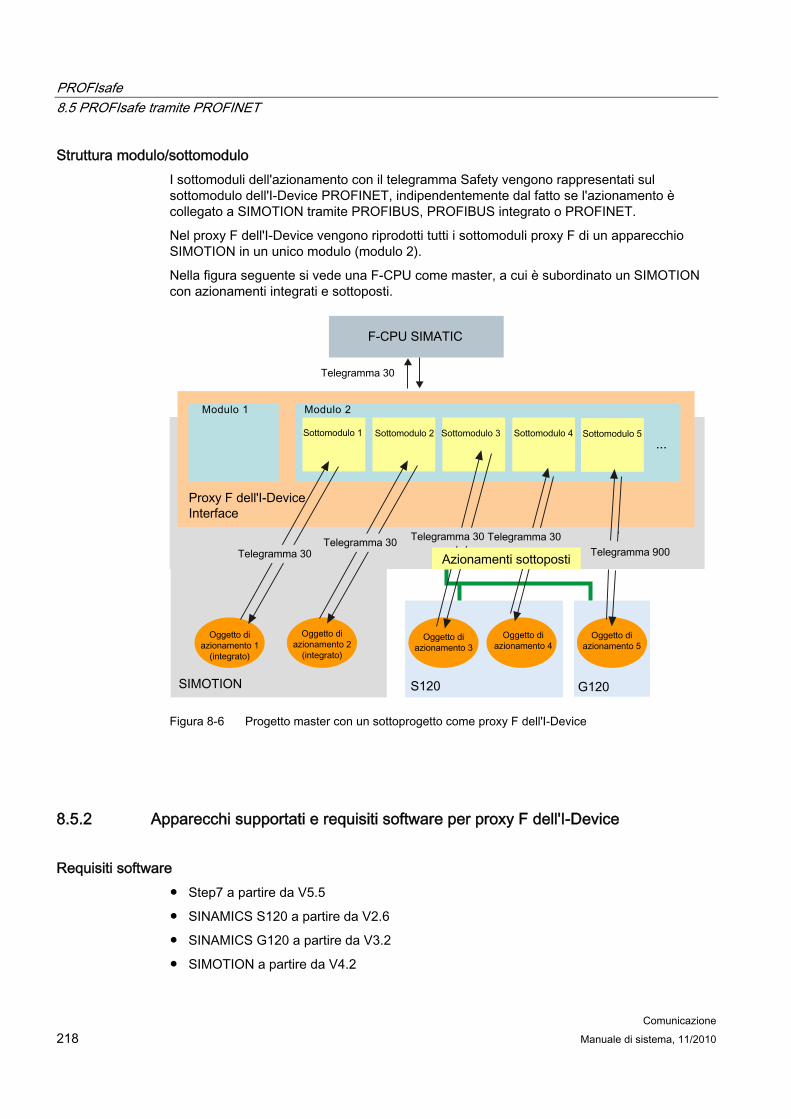
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 218 Manuale di sistema, 11/2010
Struttura modulo/sottomodulo I sottomoduli dell'azionamento con il telegramma Safety vengono rappresentati sul sottomodulo dell'I-Device PROFINET, indipendentemente dal fatto se l'azionamento è collegato a SIMOTION tramite PROFIBUS, PROFIBUS integrato o PROFINET.
Nel proxy F dell'I-Device vengono riprodotti tutti i sottomoduli proxy F di un apparecchio SIMOTION in un unico modulo (modulo 2).
Nella figura seguente si vede una F-CPU come master, a cui è subordinato un SIMOTION con azionamenti integrati e sottoposti.
Figura 8-6 Progetto master con un sottoprogetto come proxy F dell'I-Device
8.5.2 Apparecchi supportati e requisiti software per proxy F dell'I-Device
Requisiti software ● Step7 a partire da V5.5
● SINAMICS S120 a partire da V2.6
● SINAMICS G120 a partire da V3.2
● SIMOTION a partire da V4.2
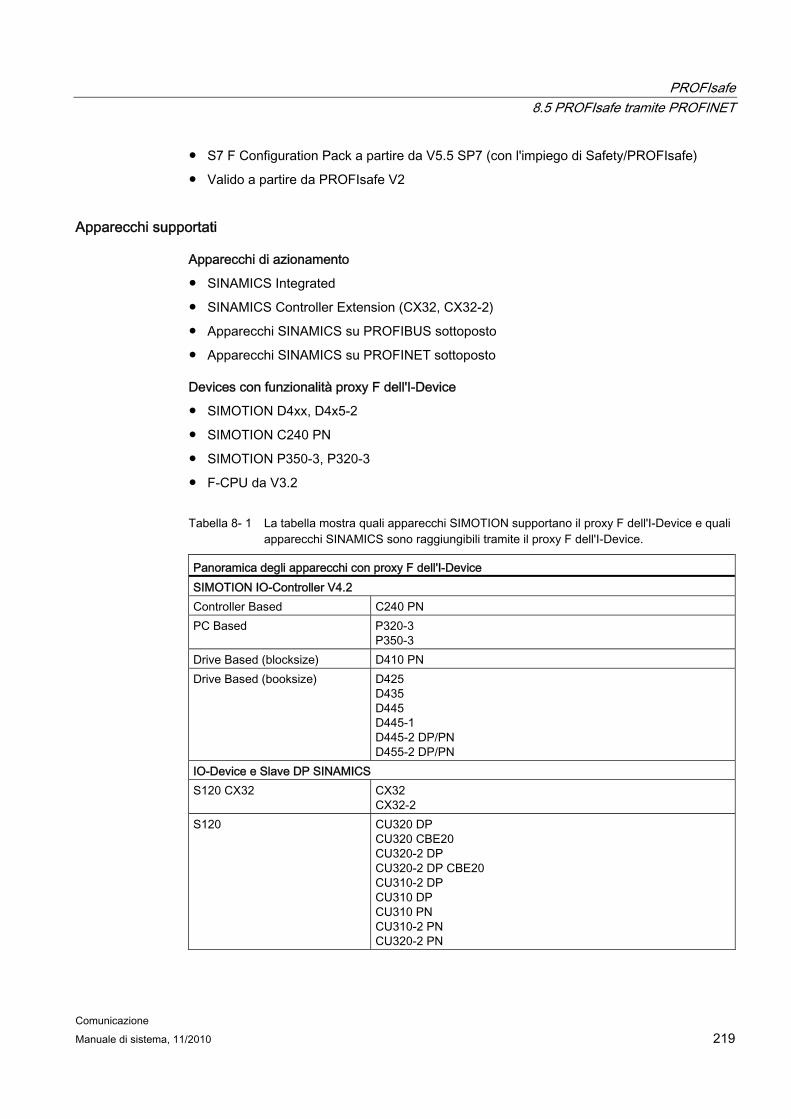
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 219
● S7 F Configuration Pack a partire da V5.5 SP7 (con l'impiego di Safety/PROFIsafe)
● Valido a partire da PROFIsafe V2
Apparecchi supportati
Apparecchi di azionamento
● SINAMICS Integrated
● SINAMICS Controller Extension (CX32, CX32-2)
● Apparecchi SINAMICS su PROFIBUS sottoposto
● Apparecchi SINAMICS su PROFINET sottoposto
Devices con funzionalità proxy F dell'I-Device
● SIMOTION D4xx, D4x5-2
● SIMOTION C240 PN
● SIMOTION P350-3, P320-3
● F-CPU da V3.2
Tabella 8- 1 La tabella mostra quali apparecchi SIMOTION supportano il proxy F dell'I-Device e quali apparecchi SINAMICS sono raggiungibili tramite il proxy F dell'I-Device.
Panoramica degli apparecchi con proxy F dell'I-Device SIMOTION IO-Controller V4.2 Controller Based C240 PN PC Based P320-3
P350-3 Drive Based (blocksize) D410 PN Drive Based (booksize) D425
D435 D445 D445-1 D445-2 DP/PN D455-2 DP/PN
IO-Device e Slave DP SINAMICS S120 CX32 CX32
CX32-2 S120 CU320 DP
CU320 CBE20 CU320-2 DP CU320-2 DP CBE20 CU310-2 DP CU310 DP CU310 PN CU310-2 PN CU320-2 PN
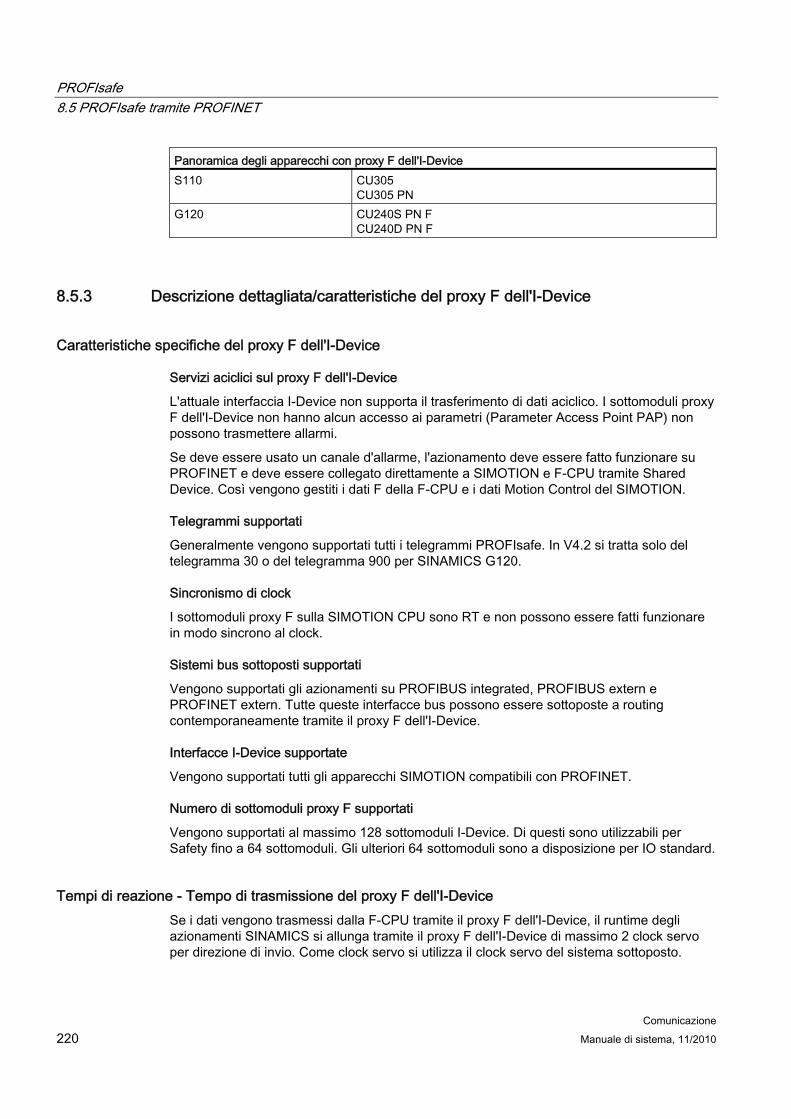
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 220 Manuale di sistema, 11/2010
Panoramica degli apparecchi con proxy F dell'I-Device S110 CU305
CU305 PN G120 CU240S PN F
CU240D PN F
8.5.3 Descrizione dettagliata/caratteristiche del proxy F dell'I-Device
Caratteristiche specifiche del proxy F dell'I-Device
Servizi aciclici sul proxy F dell'I-Device
L'attuale interfaccia I-Device non supporta il trasferimento di dati aciclico. I sottomoduli proxy F dell'I-Device non hanno alcun accesso ai parametri (Parameter Access Point PAP) non possono trasmettere allarmi.
Se deve essere usato un canale d'allarme, l'azionamento deve essere fatto funzionare su PROFINET e deve essere collegato direttamente a SIMOTION e F-CPU tramite Shared Device. Così vengono gestiti i dati F della F-CPU e i dati Motion Control del SIMOTION.
Telegrammi supportati
Generalmente vengono supportati tutti i telegrammi PROFIsafe. In V4.2 si tratta solo del telegramma 30 o del telegramma 900 per SINAMICS G120.
Sincronismo di clock
I sottomoduli proxy F sulla SIMOTION CPU sono RT e non possono essere fatti funzionare in modo sincrono al clock.
Sistemi bus sottoposti supportati
Vengono supportati gli azionamenti su PROFIBUS integrated, PROFIBUS extern e PROFINET extern. Tutte queste interfacce bus possono essere sottoposte a routing contemporaneamente tramite il proxy F dell'I-Device.
Interfacce I-Device supportate
Vengono supportati tutti gli apparecchi SIMOTION compatibili con PROFINET.
Numero di sottomoduli proxy F supportati
Vengono supportati al massimo 128 sottomoduli I-Device. Di questi sono utilizzabili per Safety fino a 64 sottomoduli. Gli ulteriori 64 sottomoduli sono a disposizione per IO standard.
Tempi di reazione - Tempo di trasmissione del proxy F dell'I-Device Se i dati vengono trasmessi dalla F-CPU tramite il proxy F dell'I-Device, il runtime degli azionamenti SINAMICS si allunga tramite il proxy F dell'I-Device di massimo 2 clock servo per direzione di invio. Come clock servo si utilizza il clock servo del sistema sottoposto.
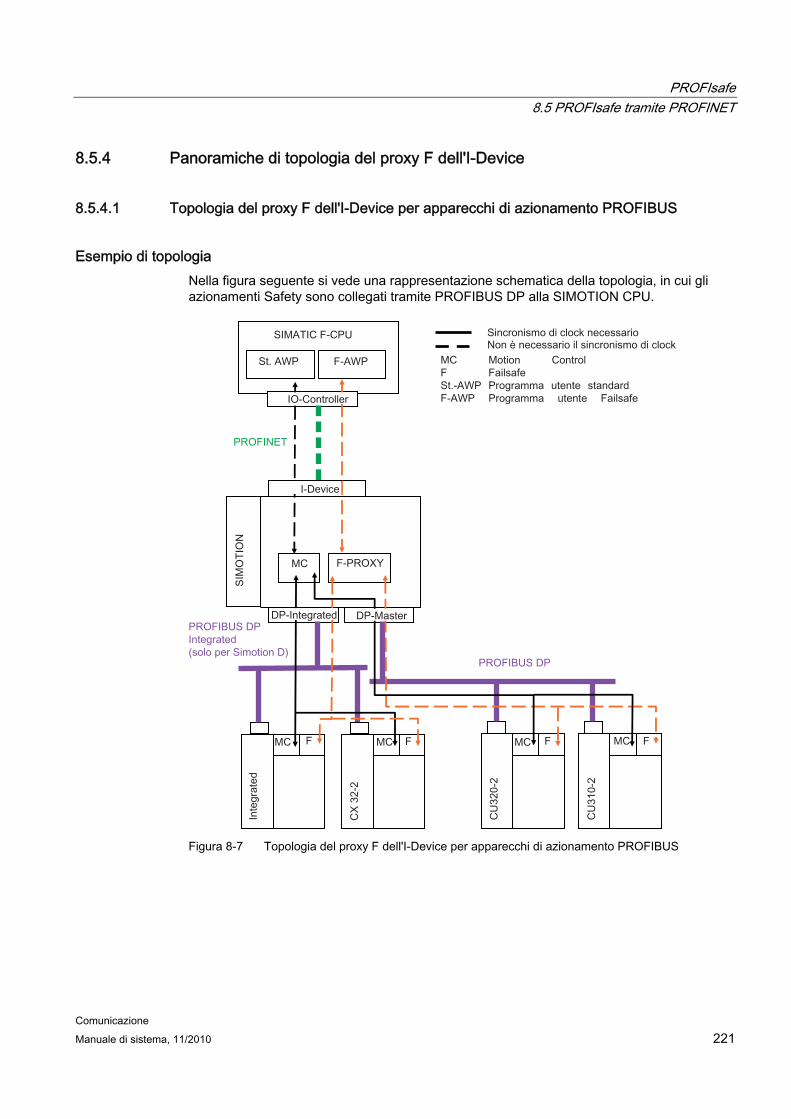
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 221
8.5.4 Panoramiche di topologia del proxy F dell'I-Device
8.5.4.1 Topologia del proxy F dell'I-Device per apparecchi di azionamento PROFIBUS
Esempio di topologia Nella figura seguente si vede una rappresentazione schematica della topologia, in cui gli azionamenti Safety sono collegati tramite PROFIBUS DP alla SIMOTION CPU.
Figura 8-7 Topologia del proxy F dell'I-Device per apparecchi di azionamento PROFIBUS
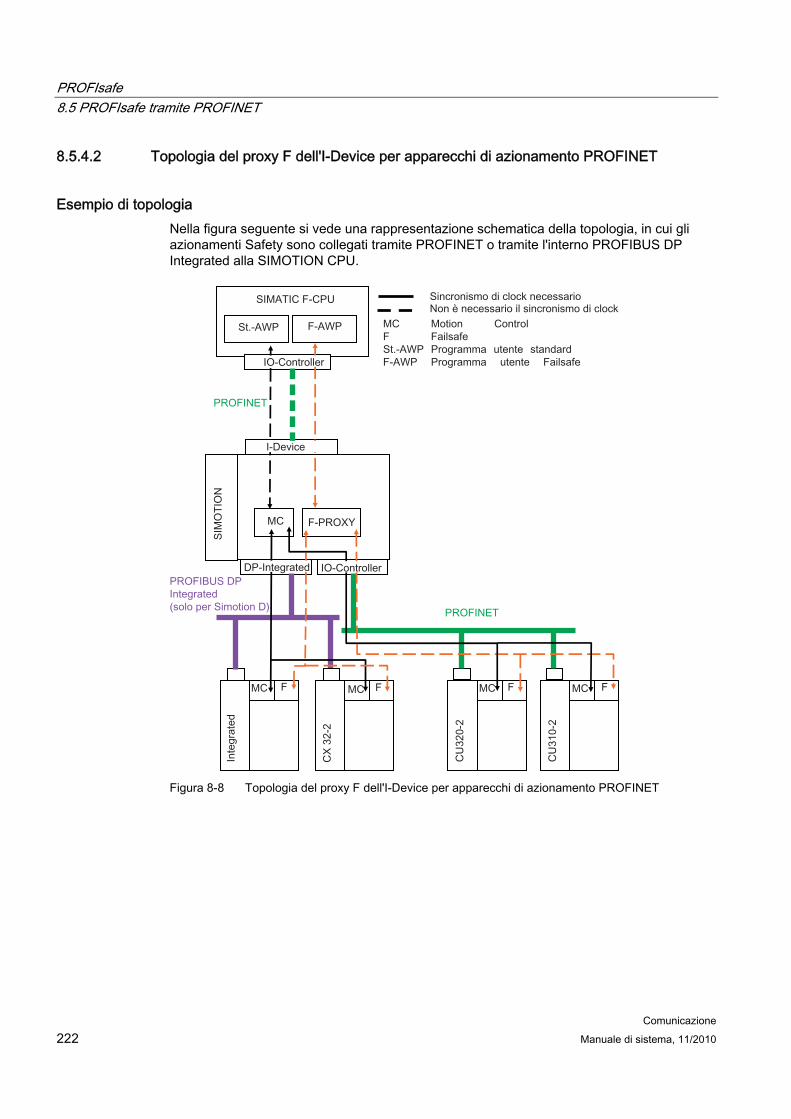
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 222 Manuale di sistema, 11/2010
8.5.4.2 Topologia del proxy F dell'I-Device per apparecchi di azionamento PROFINET
Esempio di topologia Nella figura seguente si vede una rappresentazione schematica della topologia, in cui gli azionamenti Safety sono collegati tramite PROFINET o tramite l'interno PROFIBUS DP Integrated alla SIMOTION CPU.
Figura 8-8 Topologia del proxy F dell'I-Device per apparecchi di azionamento PROFINET
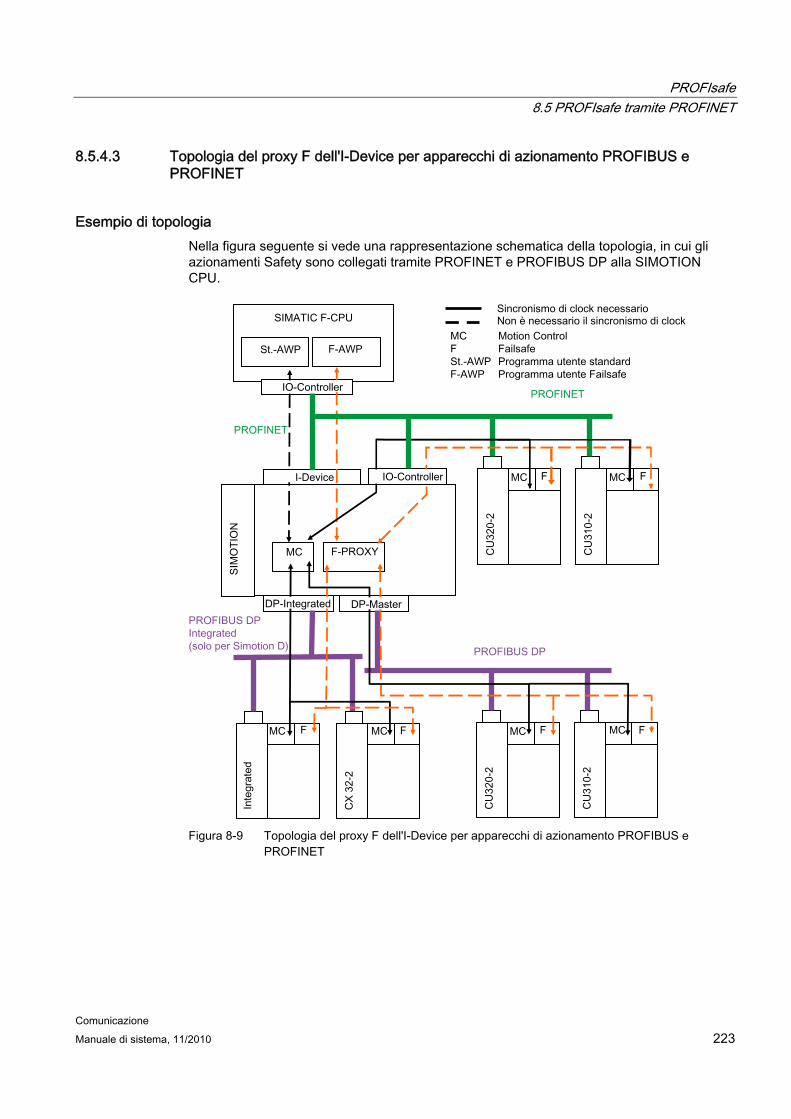
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 223
8.5.4.3 Topologia del proxy F dell'I-Device per apparecchi di azionamento PROFIBUS e PROFINET
Esempio di topologia Nella figura seguente si vede una rappresentazione schematica della topologia, in cui gli azionamenti Safety sono collegati tramite PROFINET e PROFIBUS DP alla SIMOTION CPU.
Figura 8-9 Topologia del proxy F dell'I-Device per apparecchi di azionamento PROFIBUS e
PROFINET
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 224 Manuale di sistema, 11/2010
8.5.5 Progettazione del proxy F dell'I-Device
8.5.5.1 Processo di progettazione principale del proxy F dell'I-Device
Requisiti per la progettazione Un host F comunica tramite l'interfaccia I-Device e un proxy F di una CPU SIMOTION con gli azionamenti, che si possono trovare su PROFIBUS DP extern, su PROFIBUS DP integrated e sul sistema PROFINET IO della CPU SIMOTION.
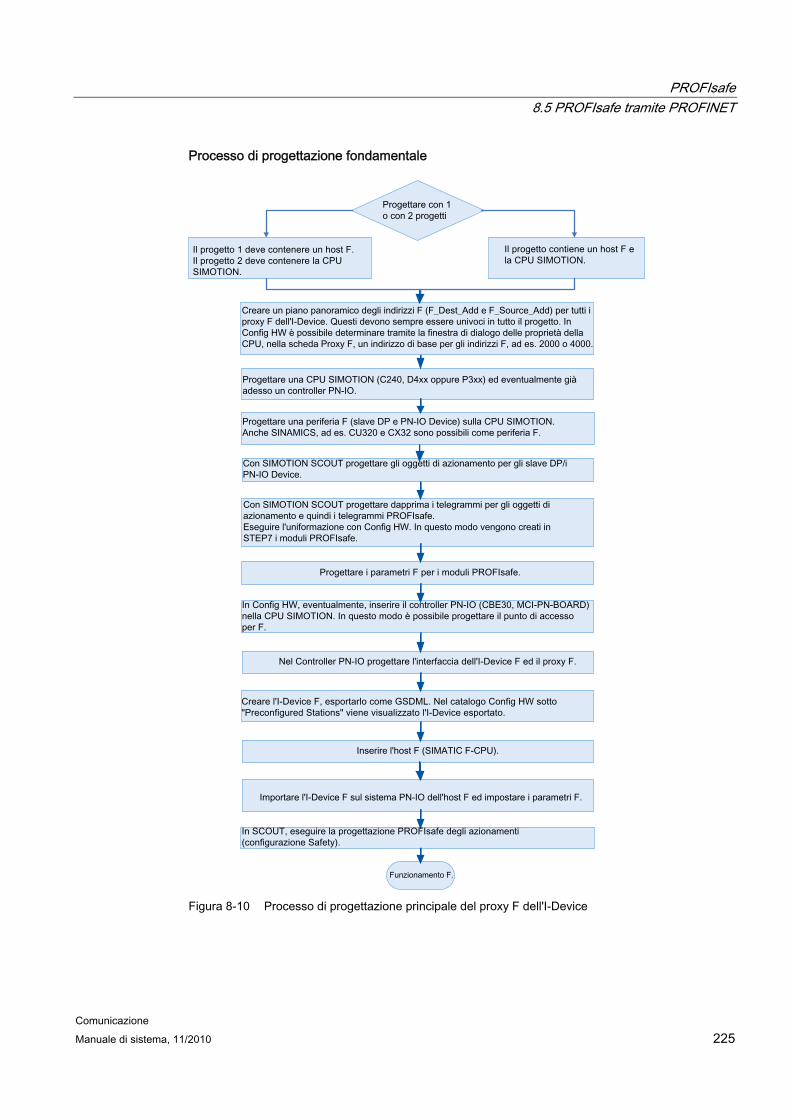
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 225
Processo di progettazione fondamentale
Figura 8-10 Processo di progettazione principale del proxy F dell'I-Device
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 226 Manuale di sistema, 11/2010
8.5.5.2 Esempio di progettazione di SIMOTION D435 e SINAMICS S120 tramite PROFINET
Esempi di progettazione del proxy F dell'I-Device Nel seguente esempio viene progettata una F-CPU SIMATIC 317F-2PN/DP V3.2. Inoltre trova impiego un SIMOTION D435 con un SINAMICS S120 CU320 PN, collegato con il SIMOTION tramite l'interfaccia PN (CBE30). Il proxy F dell'I-Device esportato della CPU SIMOTION sottoposta viene importato quindi nella F-CPU sovrapposta. Nell'esempio viene rappresentata la progettazione con un solo progetto.
Come si progetta un proxy F dell'I-Device? 1. Creare un piano panoramico con la F-CPU, la CPU SIMOTION e gli azionamenti che
devono supportare PROFIsafe. Nell'esempio questi sono soltanto una CPU SIMOTION e un SINAMICS S120. Immettere nel piano panoramico gli indirizzi di base della CPU e gli azionamenti necessari. Gli indirizzi determinati devono essere utilizzati più tardi durante la progettazione. Il piano panoramico è necessario soltanto per progetti più grandi.
2. Creare un nuovo progetto in SIMOTION SCOUT.
Ulteriori informazioni per la progettazione con PROFINET si trovano nel capitolo Progettazione di PROFINET IO con SIMOTION (Pagina 75).
3. Inserire un SIMOTION D435 V4.2 La casella di controllo Apri Config HW deve essere attivata. Confermare con OK. Si apre Config HW.
4. Immettere con la CPU SIMOTION in Config HW un indirizzo di base per gli indirizzi F. Tutti i F_Dest_Add per gli azionamenti sottoposti si avviano quindi con questa base e sono gestibili in modo più semplice per numerosi progetti. Se si utilizza come base ad es. 4000, al primo F_Dest_Add dell'azionamento verrà assegnato 400 ecc. Normalmente la base è 2000.
5. Inserire eventualmente un CBE30 e progettare la rete PROFINET.
6. Inserire un SINAMICS S120 CU320 PN (a partire da V2.6) in Config HW e progettare l'interfaccia.
7. Configurare l'apparecchio di azionamento in SIMOTION SCOUT con l'aiuto del wizard.
8. Immettere pertanto un nuovo TO asse ed eseguire il wizard assi. Nel wizard interconnettere l'asse al corrispondente oggetto di azionamento dell'S120; automaticamente viene creato un relativo telegramma (utilizzo dell'assegnazione simbolica).
9. Salvare e compilare il progetto.
10. Dopo la configurazione è necessario scegliere il telegramma PROFIsafe. Fare doppio clic nella navigazione di progetto del SIMOTION SCOUT sotto l'apparecchio di azionamento su <"Apparecchio_azionamento_xx"> - Comunicazione > Configurazione del telegramma. I telegrammi vengono visualizzati nell'area di lavoro.
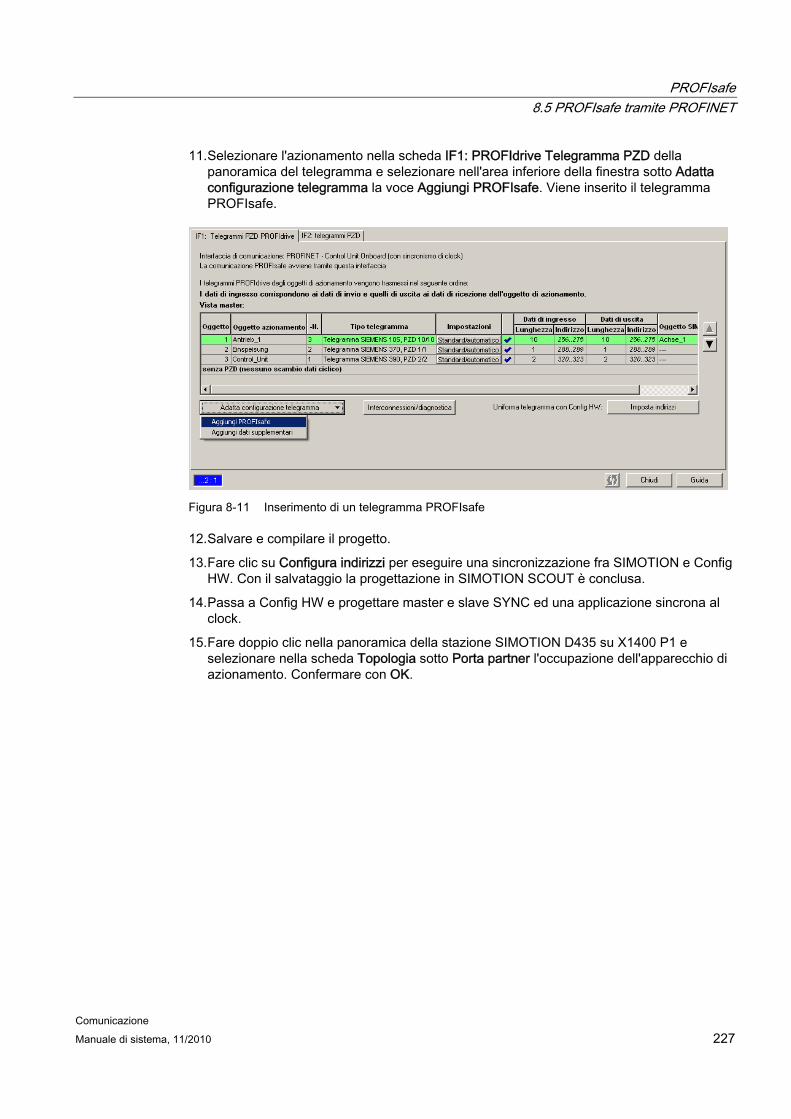
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 227
11. Selezionare l'azionamento nella scheda IF1: PROFIdrive Telegramma PZD della panoramica del telegramma e selezionare nell'area inferiore della finestra sotto Adatta configurazione telegramma la voce Aggiungi PROFIsafe. Viene inserito il telegramma PROFIsafe.
Figura 8-11 Inserimento di un telegramma PROFIsafe
12. Salvare e compilare il progetto.
13. Fare clic su Configura indirizzi per eseguire una sincronizzazione fra SIMOTION e Config HW. Con il salvataggio la progettazione in SIMOTION SCOUT è conclusa.
14. Passa a Config HW e progettare master e slave SYNC ed una applicazione sincrona al clock.
15. Fare doppio clic nella panoramica della stazione SIMOTION D435 su X1400 P1 e selezionare nella scheda Topologia sotto Porta partner l'occupazione dell'apparecchio di azionamento. Confermare con OK.
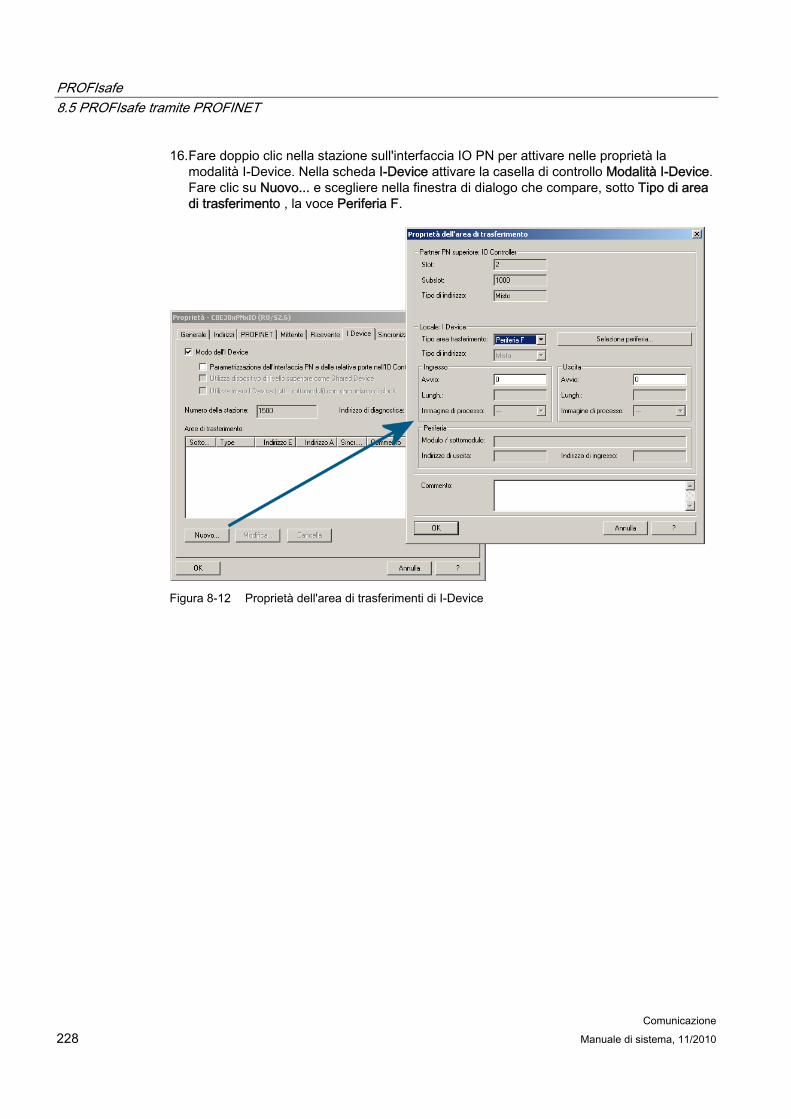
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 228 Manuale di sistema, 11/2010
16. Fare doppio clic nella stazione sull'interfaccia IO PN per attivare nelle proprietà la modalità I-Device. Nella scheda I-Device attivare la casella di controllo Modalità I-Device. Fare clic su Nuovo... e scegliere nella finestra di dialogo che compare, sotto Tipo di area di trasferimento , la voce Periferia F.
Figura 8-12 Proprietà dell'area di trasferimenti di I-Device
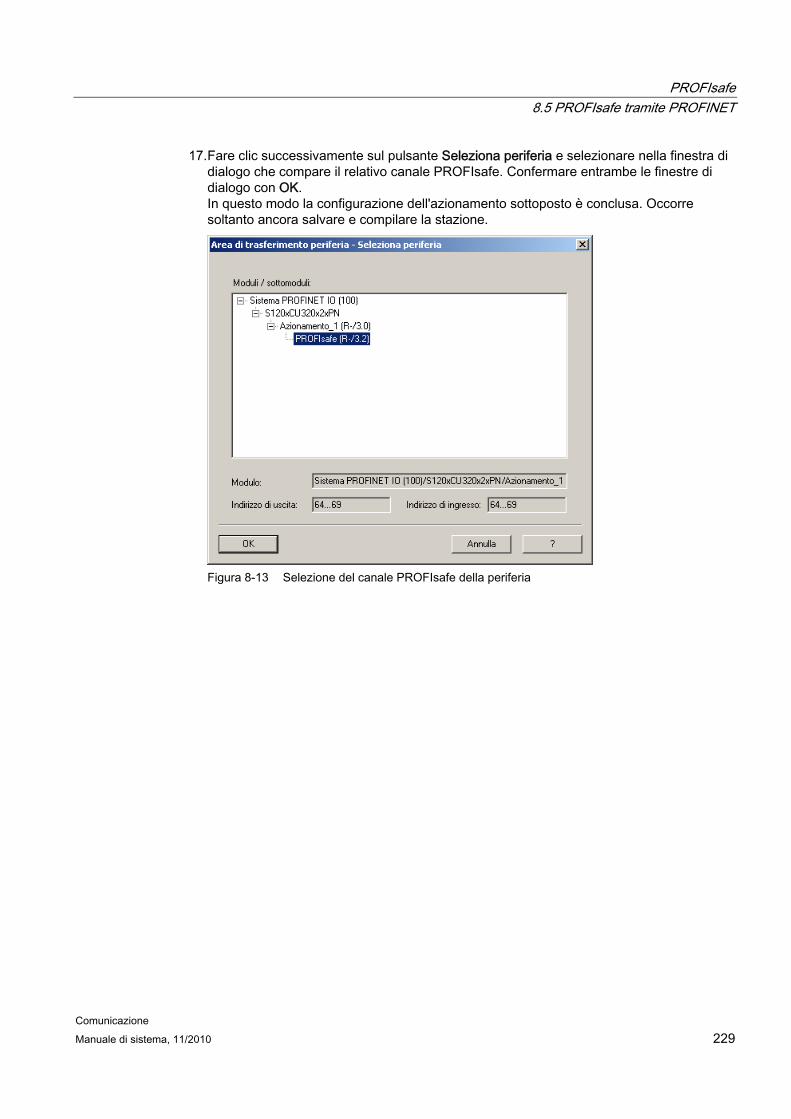
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 229
17. Fare clic successivamente sul pulsante Seleziona periferia e selezionare nella finestra di dialogo che compare il relativo canale PROFIsafe. Confermare entrambe le finestre di dialogo con OK. In questo modo la configurazione dell'azionamento sottoposto è conclusa. Occorre soltanto ancora salvare e compilare la stazione.
Figura 8-13 Selezione del canale PROFIsafe della periferia
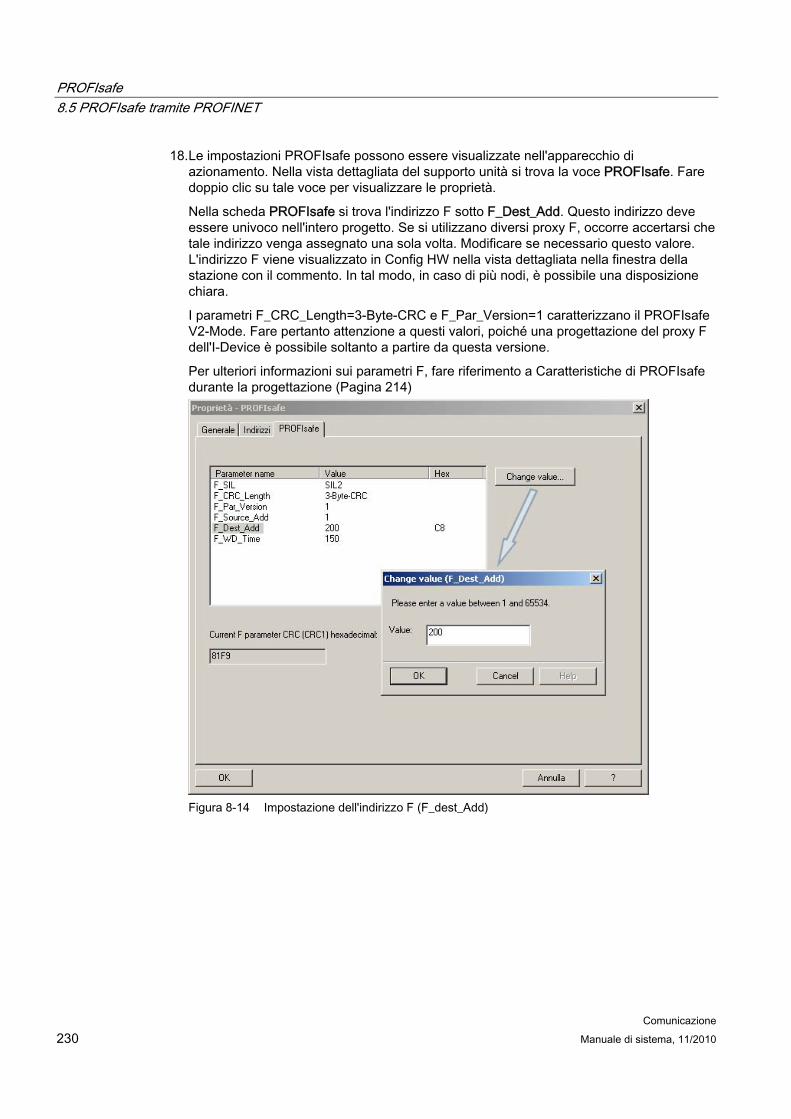
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 230 Manuale di sistema, 11/2010
18. Le impostazioni PROFIsafe possono essere visualizzate nell'apparecchio di azionamento. Nella vista dettagliata del supporto unità si trova la voce PROFIsafe. Fare doppio clic su tale voce per visualizzare le proprietà.
Nella scheda PROFIsafe si trova l'indirizzo F sotto F_Dest_Add. Questo indirizzo deve essere univoco nell'intero progetto. Se si utilizzano diversi proxy F, occorre accertarsi che tale indirizzo venga assegnato una sola volta. Modificare se necessario questo valore. L'indirizzo F viene visualizzato in Config HW nella vista dettagliata nella finestra della stazione con il commento. In tal modo, in caso di più nodi, è possibile una disposizione chiara.
I parametri F_CRC_Length=3-Byte-CRC e F_Par_Version=1 caratterizzano il PROFIsafe V2-Mode. Fare pertanto attenzione a questi valori, poiché una progettazione del proxy F dell'I-Device è possibile soltanto a partire da questa versione.
Per ulteriori informazioni sui parametri F, fare riferimento a Caratteristiche di PROFIsafe durante la progettazione (Pagina 214)
Figura 8-14 Impostazione dell'indirizzo F (F_dest_Add)
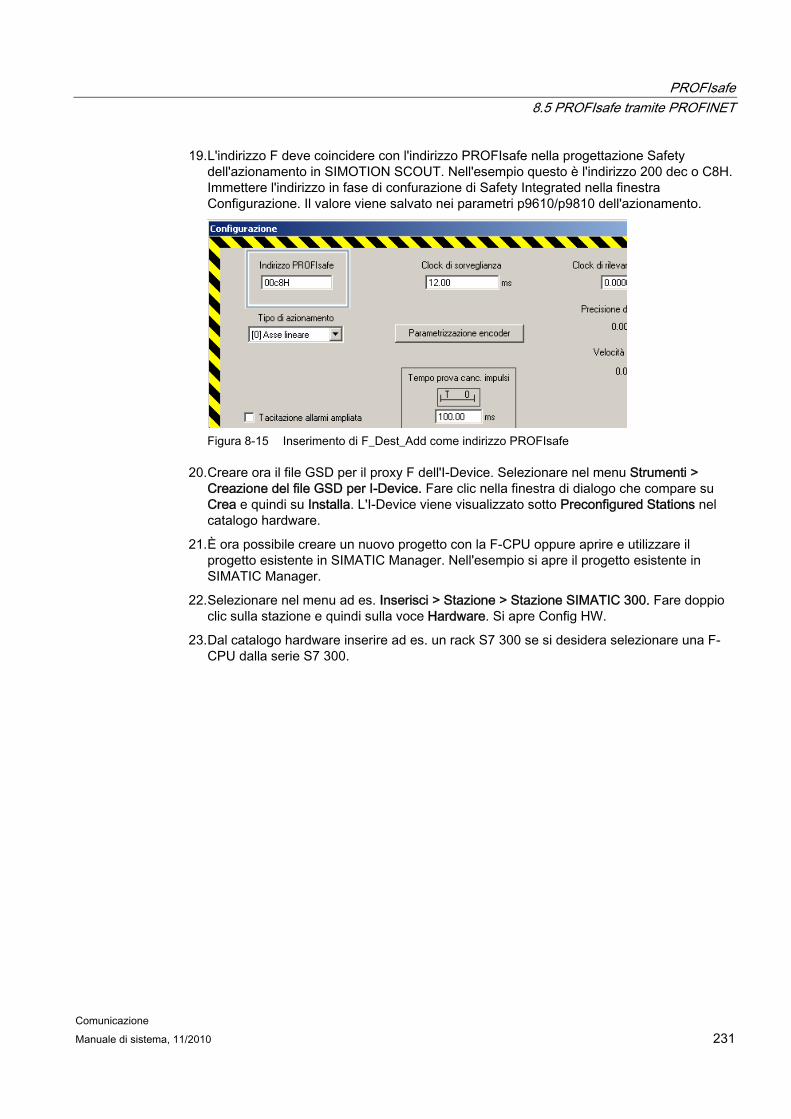
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 231
19. L'indirizzo F deve coincidere con l'indirizzo PROFIsafe nella progettazione Safety dell'azionamento in SIMOTION SCOUT. Nell'esempio questo è l'indirizzo 200 dec o C8H. Immettere l'indirizzo in fase di confurazione di Safety Integrated nella finestra Configurazione. Il valore viene salvato nei parametri p9610/p9810 dell'azionamento.
Figura 8-15 Inserimento di F_Dest_Add come indirizzo PROFIsafe
20. Creare ora il file GSD per il proxy F dell'I-Device. Selezionare nel menu Strumenti > Creazione del file GSD per I-Device. Fare clic nella finestra di dialogo che compare su Crea e quindi su Installa. L'I-Device viene visualizzato sotto Preconfigured Stations nel catalogo hardware.
21. È ora possibile creare un nuovo progetto con la F-CPU oppure aprire e utilizzare il progetto esistente in SIMATIC Manager. Nell'esempio si apre il progetto esistente in SIMATIC Manager.
22. Selezionare nel menu ad es. Inserisci > Stazione > Stazione SIMATIC 300. Fare doppio clic sulla stazione e quindi sulla voce Hardware. Si apre Config HW.
23. Dal catalogo hardware inserire ad es. un rack S7 300 se si desidera selezionare una F-CPU dalla serie S7 300.
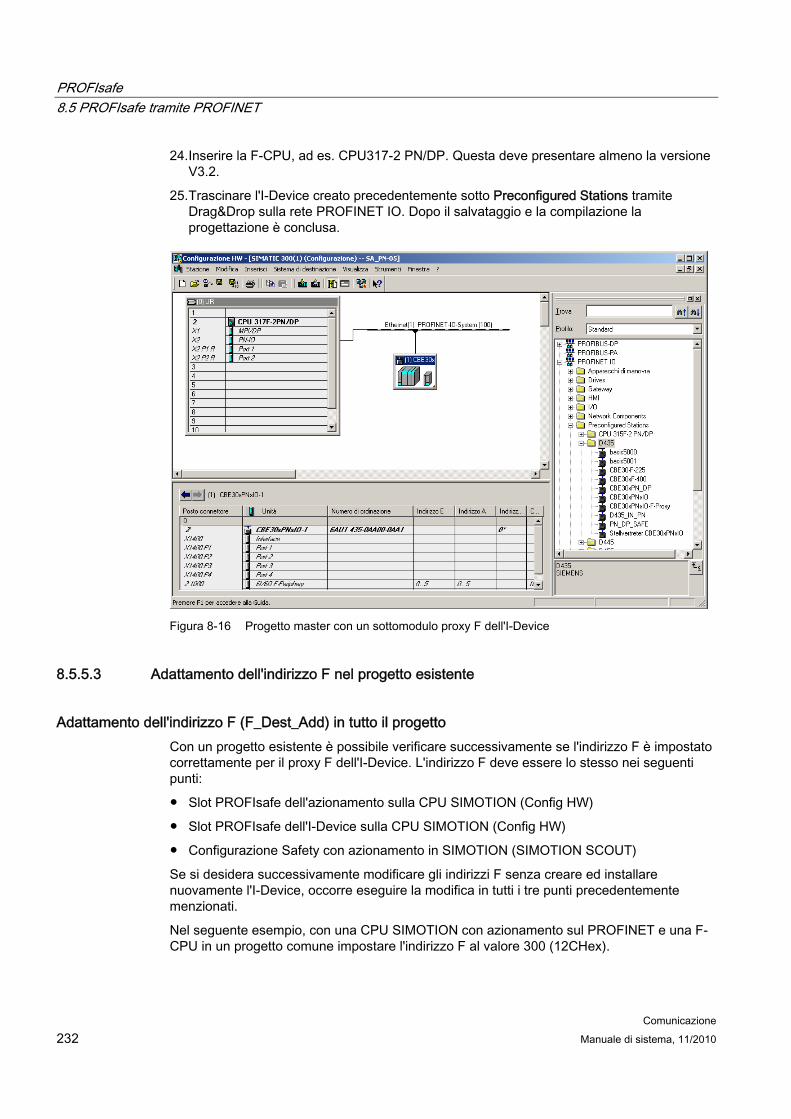
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 232 Manuale di sistema, 11/2010
24. Inserire la F-CPU, ad es. CPU317-2 PN/DP. Questa deve presentare almeno la versione V3.2.
25. Trascinare l'I-Device creato precedentemente sotto Preconfigured Stations tramite Drag&Drop sulla rete PROFINET IO. Dopo il salvataggio e la compilazione la progettazione è conclusa.
Figura 8-16 Progetto master con un sottomodulo proxy F dell'I-Device
8.5.5.3 Adattamento dell'indirizzo F nel progetto esistente
Adattamento dell'indirizzo F (F_Dest_Add) in tutto il progetto Con un progetto esistente è possibile verificare successivamente se l'indirizzo F è impostato correttamente per il proxy F dell'I-Device. L'indirizzo F deve essere lo stesso nei seguenti punti:
● Slot PROFIsafe dell'azionamento sulla CPU SIMOTION (Config HW)
● Slot PROFIsafe dell'I-Device sulla CPU SIMOTION (Config HW)
● Configurazione Safety con azionamento in SIMOTION (SIMOTION SCOUT)
Se si desidera successivamente modificare gli indirizzi F senza creare ed installare nuovamente l'I-Device, occorre eseguire la modifica in tutti i tre punti precedentemente menzionati.
Nel seguente esempio, con una CPU SIMOTION con azionamento sul PROFINET e una F-CPU in un progetto comune impostare l'indirizzo F al valore 300 (12CHex).
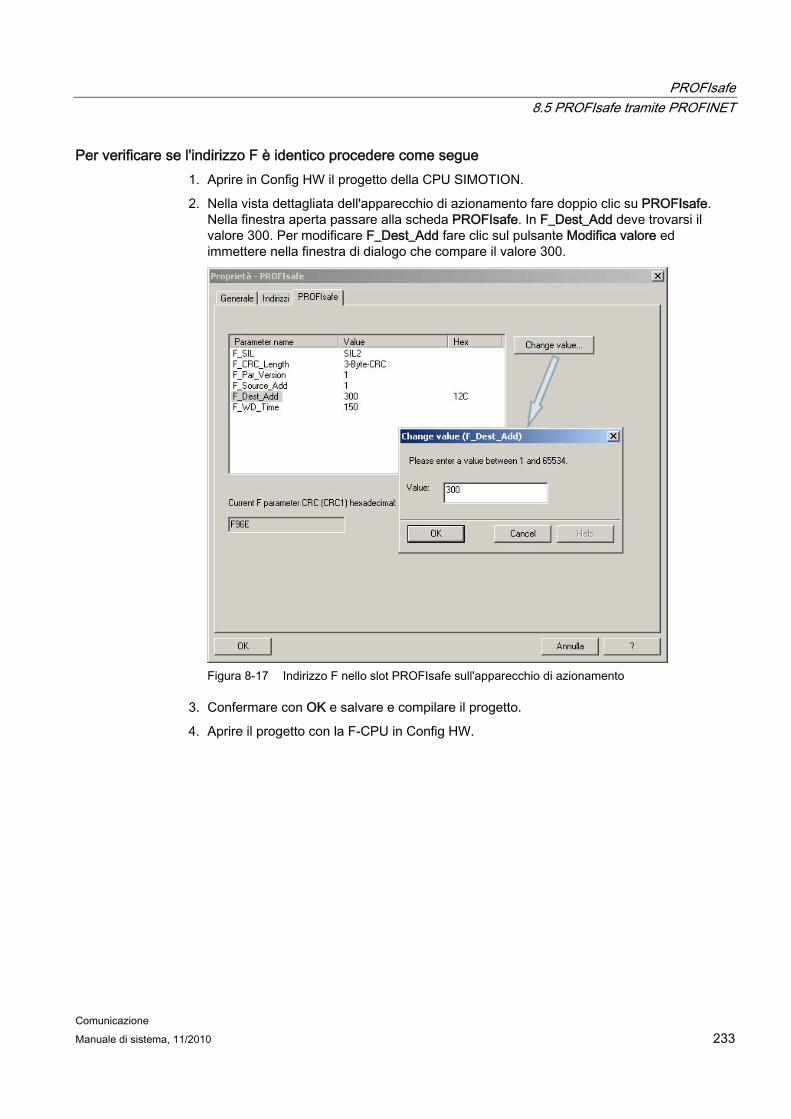
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 233
Per verificare se l'indirizzo F è identico procedere come segue 1. Aprire in Config HW il progetto della CPU SIMOTION.
2. Nella vista dettagliata dell'apparecchio di azionamento fare doppio clic su PROFIsafe. Nella finestra aperta passare alla scheda PROFIsafe. In F_Dest_Add deve trovarsi il valore 300. Per modificare F_Dest_Add fare clic sul pulsante Modifica valore ed immettere nella finestra di dialogo che compare il valore 300.
Figura 8-17 Indirizzo F nello slot PROFIsafe sull'apparecchio di azionamento
3. Confermare con OK e salvare e compilare il progetto.
4. Aprire il progetto con la F-CPU in Config HW.
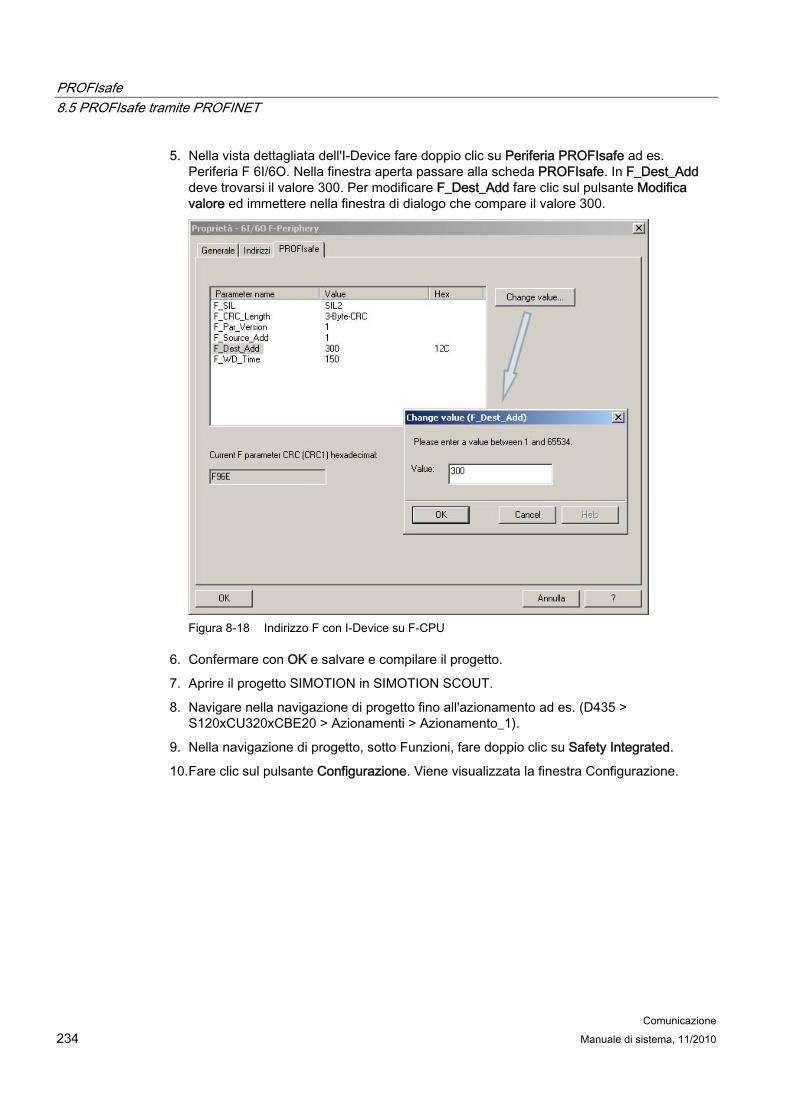
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 234 Manuale di sistema, 11/2010
5. Nella vista dettagliata dell'I-Device fare doppio clic su Periferia PROFIsafe ad es. Periferia F 6I/6O. Nella finestra aperta passare alla scheda PROFIsafe. In F_Dest_Add deve trovarsi il valore 300. Per modificare F_Dest_Add fare clic sul pulsante Modifica valore ed immettere nella finestra di dialogo che compare il valore 300.
Figura 8-18 Indirizzo F con I-Device su F-CPU
6. Confermare con OK e salvare e compilare il progetto.
7. Aprire il progetto SIMOTION in SIMOTION SCOUT.
8. Navigare nella navigazione di progetto fino all'azionamento ad es. (D435 > S120xCU320xCBE20 > Azionamenti > Azionamento_1).
9. Nella navigazione di progetto, sotto Funzioni, fare doppio clic su Safety Integrated.
10. Fare clic sul pulsante Configurazione. Viene visualizzata la finestra Configurazione.
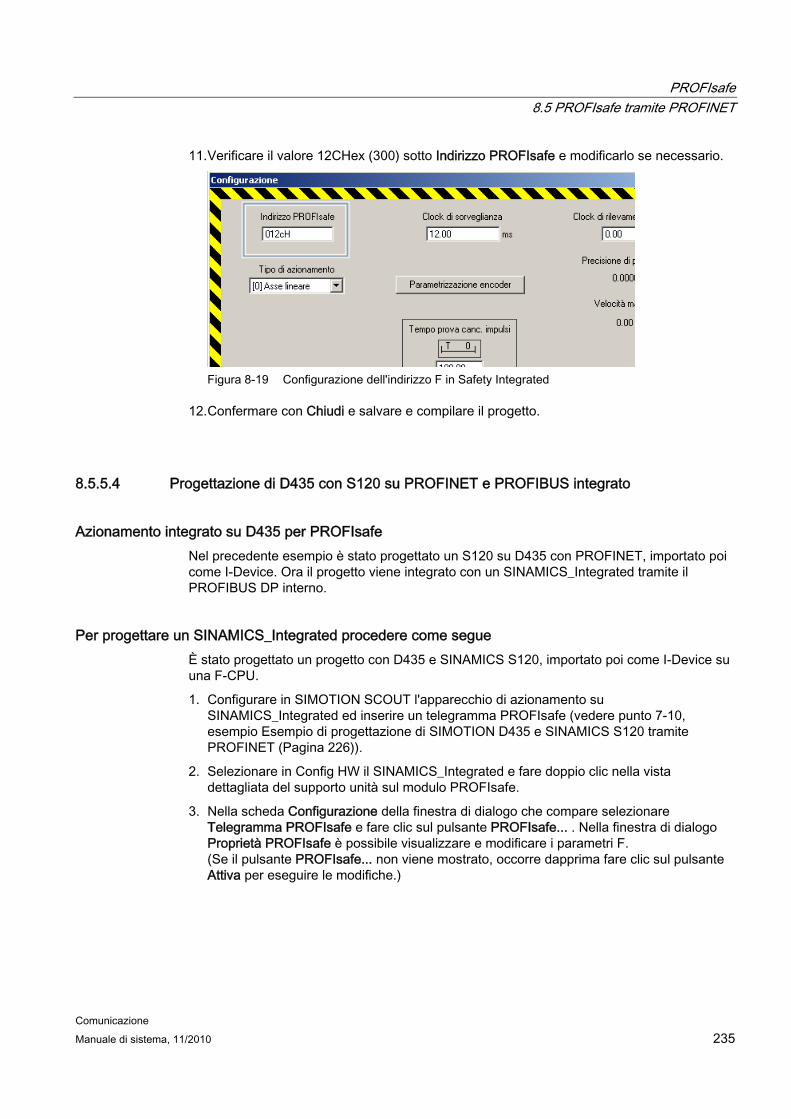
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 235
11. Verificare il valore 12CHex (300) sotto Indirizzo PROFIsafe e modificarlo se necessario.
Figura 8-19 Configurazione dell'indirizzo F in Safety Integrated
12. Confermare con Chiudi e salvare e compilare il progetto.
8.5.5.4 Progettazione di D435 con S120 su PROFINET e PROFIBUS integrato
Azionamento integrato su D435 per PROFIsafe Nel precedente esempio è stato progettato un S120 su D435 con PROFINET, importato poi come I-Device. Ora il progetto viene integrato con un SINAMICS_Integrated tramite il PROFIBUS DP interno.
Per progettare un SINAMICS_Integrated procedere come segue È stato progettato un progetto con D435 e SINAMICS S120, importato poi come I-Device su una F-CPU.
1. Configurare in SIMOTION SCOUT l'apparecchio di azionamento su SINAMICS_Integrated ed inserire un telegramma PROFIsafe (vedere punto 7-10, esempio Esempio di progettazione di SIMOTION D435 e SINAMICS S120 tramite PROFINET (Pagina 226)).
2. Selezionare in Config HW il SINAMICS_Integrated e fare doppio clic nella vista dettagliata del supporto unità sul modulo PROFIsafe.
3. Nella scheda Configurazione della finestra di dialogo che compare selezionare Telegramma PROFIsafe e fare clic sul pulsante PROFIsafe... . Nella finestra di dialogo Proprietà PROFIsafe è possibile visualizzare e modificare i parametri F. (Se il pulsante PROFIsafe... non viene mostrato, occorre dapprima fare clic sul pulsante Attiva per eseguire le modifiche.)
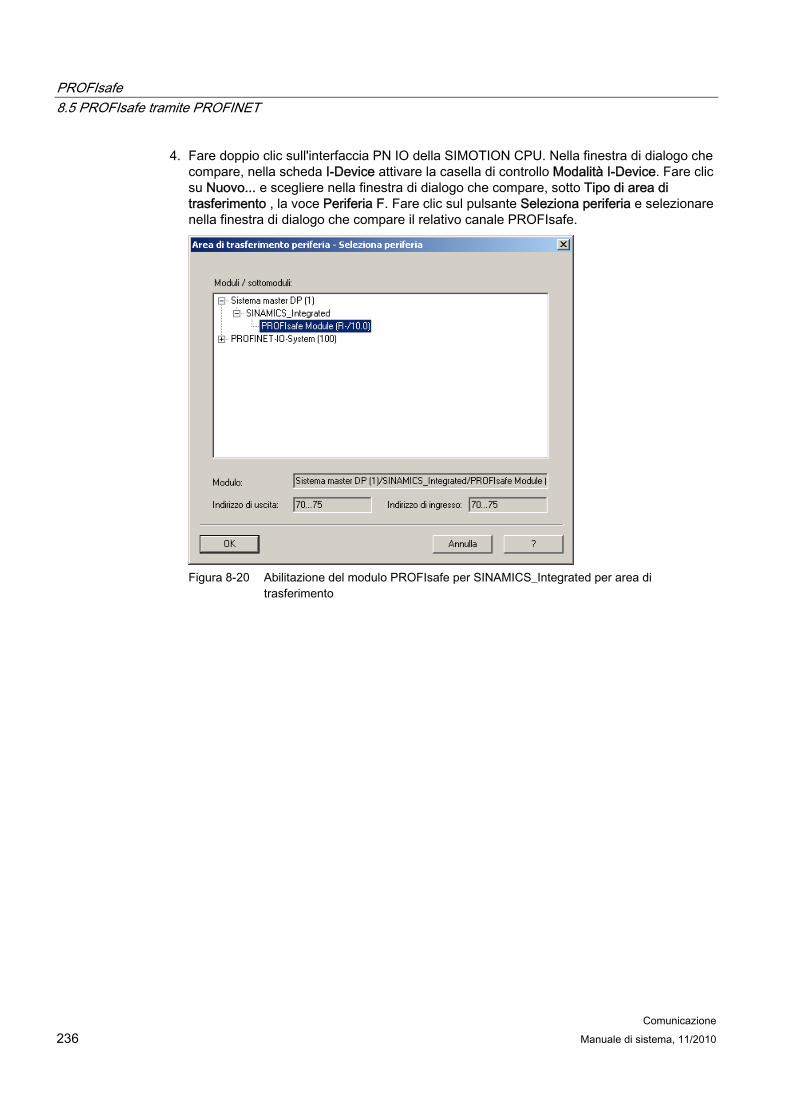
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 236 Manuale di sistema, 11/2010
4. Fare doppio clic sull'interfaccia PN IO della SIMOTION CPU. Nella finestra di dialogo che compare, nella scheda I-Device attivare la casella di controllo Modalità I-Device. Fare clic su Nuovo... e scegliere nella finestra di dialogo che compare, sotto Tipo di area di trasferimento , la voce Periferia F. Fare clic sul pulsante Seleziona periferia e selezionare nella finestra di dialogo che compare il relativo canale PROFIsafe.
Figura 8-20 Abilitazione del modulo PROFIsafe per SINAMICS_Integrated per area di
trasferimento
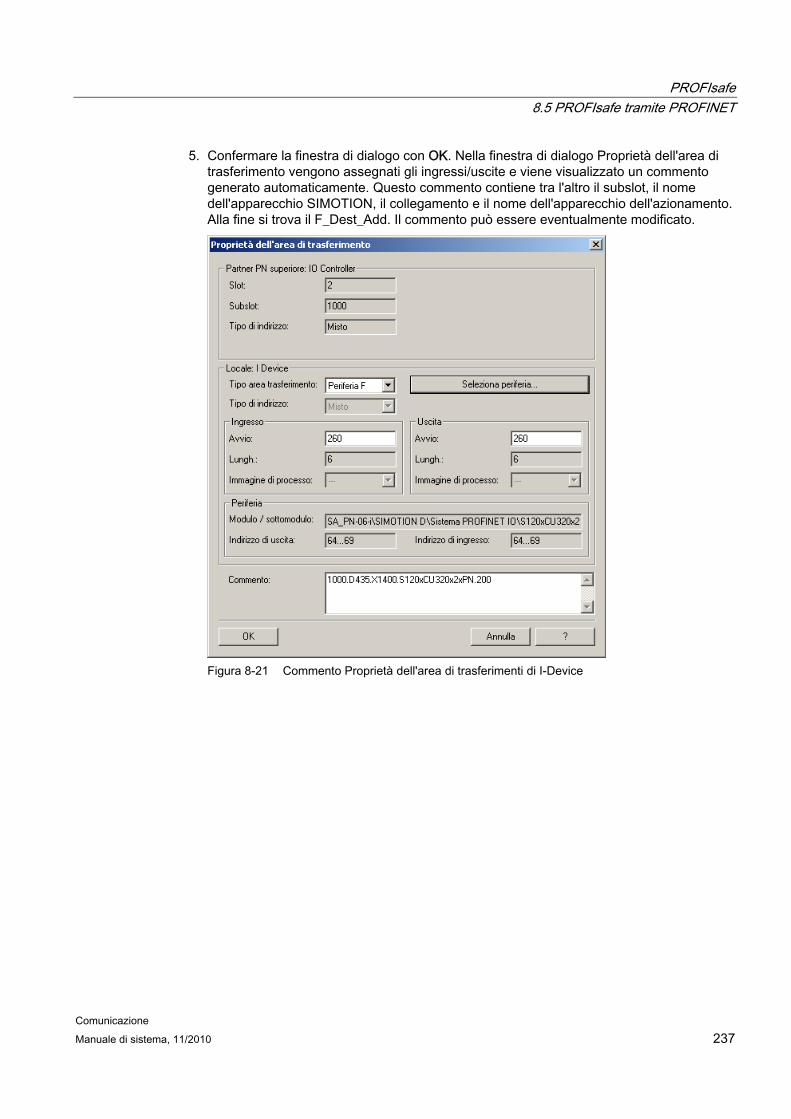
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 237
5. Confermare la finestra di dialogo con OK. Nella finestra di dialogo Proprietà dell'area di trasferimento vengono assegnati gli ingressi/uscite e viene visualizzato un commento generato automaticamente. Questo commento contiene tra l'altro il subslot, il nome dell'apparecchio SIMOTION, il collegamento e il nome dell'apparecchio dell'azionamento. Alla fine si trova il F_Dest_Add. Il commento può essere eventualmente modificato.
Figura 8-21 Commento Proprietà dell'area di trasferimenti di I-Device
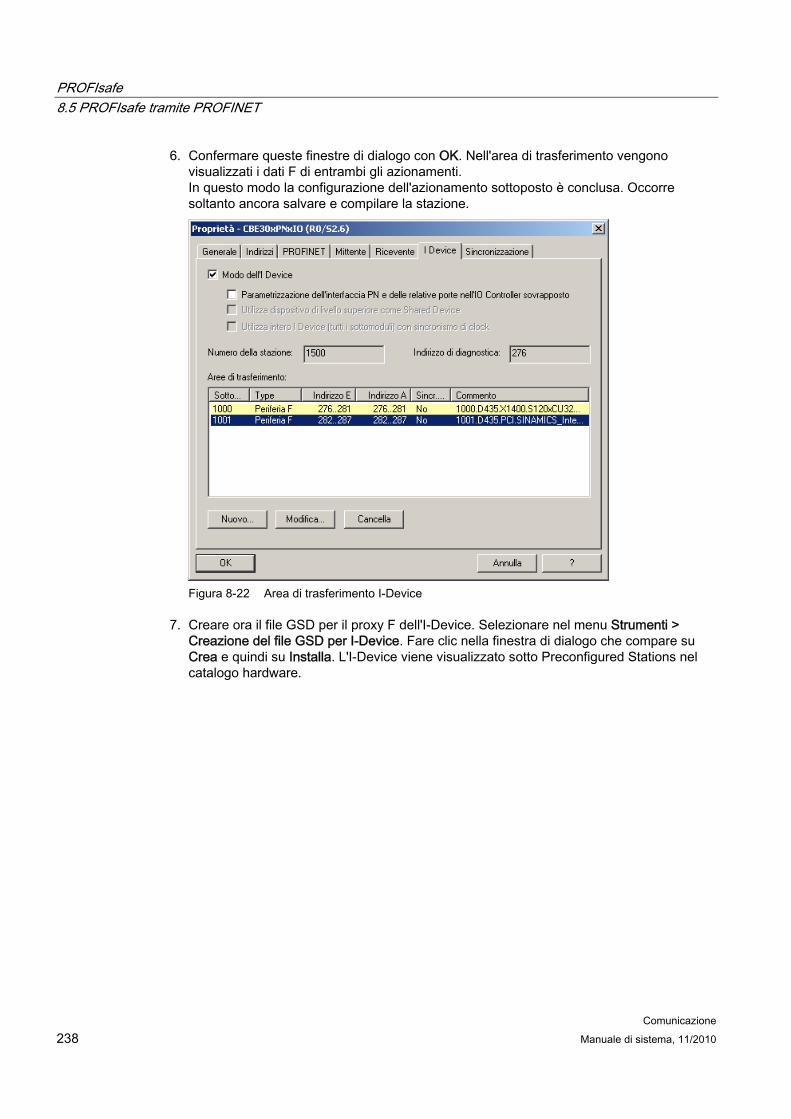
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 238 Manuale di sistema, 11/2010
6. Confermare queste finestre di dialogo con OK. Nell'area di trasferimento vengono visualizzati i dati F di entrambi gli azionamenti. In questo modo la configurazione dell'azionamento sottoposto è conclusa. Occorre soltanto ancora salvare e compilare la stazione.
Figura 8-22 Area di trasferimento I-Device
7. Creare ora il file GSD per il proxy F dell'I-Device. Selezionare nel menu Strumenti > Creazione del file GSD per I-Device. Fare clic nella finestra di dialogo che compare su Crea e quindi su Installa. L'I-Device viene visualizzato sotto Preconfigured Stations nel catalogo hardware.
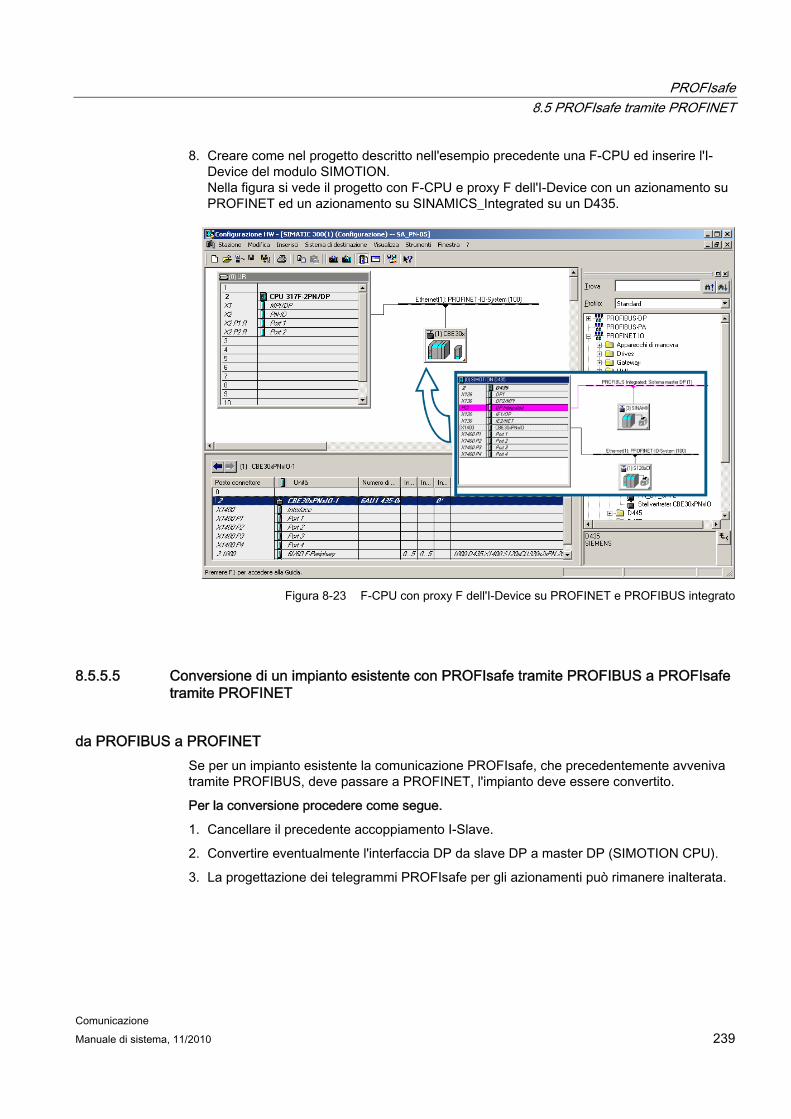
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 239
8. Creare come nel progetto descritto nell'esempio precedente una F-CPU ed inserire l'I-Device del modulo SIMOTION. Nella figura si vede il progetto con F-CPU e proxy F dell'I-Device con un azionamento su PROFINET ed un azionamento su SINAMICS_Integrated su un D435.
Figura 8-23 F-CPU con proxy F dell'I-Device su PROFINET e PROFIBUS integrato
8.5.5.5 Conversione di un impianto esistente con PROFIsafe tramite PROFIBUS a PROFIsafe tramite PROFINET
da PROFIBUS a PROFINET Se per un impianto esistente la comunicazione PROFIsafe, che precedentemente avveniva tramite PROFIBUS, deve passare a PROFINET, l'impianto deve essere convertito.
Per la conversione procedere come segue.
1. Cancellare il precedente accoppiamento I-Slave.
2. Convertire eventualmente l'interfaccia DP da slave DP a master DP (SIMOTION CPU).
3. La progettazione dei telegrammi PROFIsafe per gli azionamenti può rimanere inalterata.
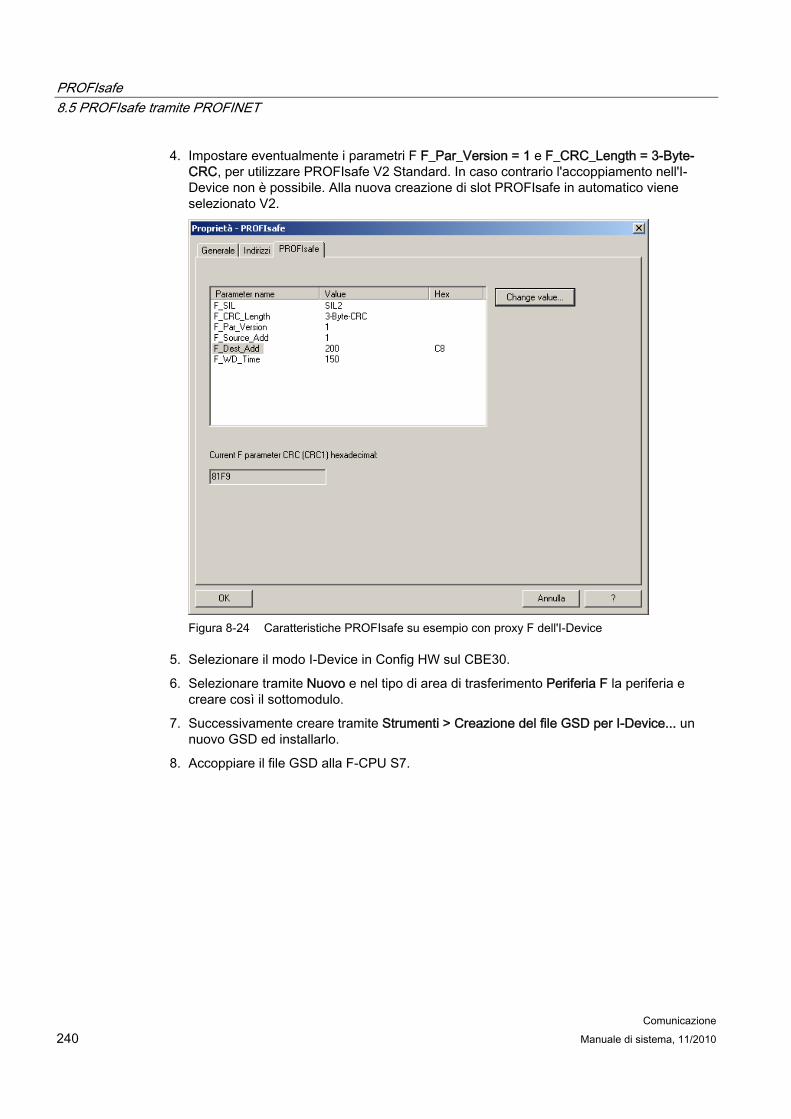
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 240 Manuale di sistema, 11/2010
4. Impostare eventualmente i parametri F F_Par_Version = 1 e F_CRC_Length = 3-Byte-CRC, per utilizzare PROFIsafe V2 Standard. In caso contrario l'accoppiamento nell'I-Device non è possibile. Alla nuova creazione di slot PROFIsafe in automatico viene selezionato V2.
Figura 8-24 Caratteristiche PROFIsafe su esempio con proxy F dell'I-Device
5. Selezionare il modo I-Device in Config HW sul CBE30.
6. Selezionare tramite Nuovo e nel tipo di area di trasferimento Periferia F la periferia e creare così il sottomodulo.
7. Successivamente creare tramite Strumenti > Creazione del file GSD per I-Device... un nuovo GSD ed installarlo.
8. Accoppiare il file GSD alla F-CPU S7.
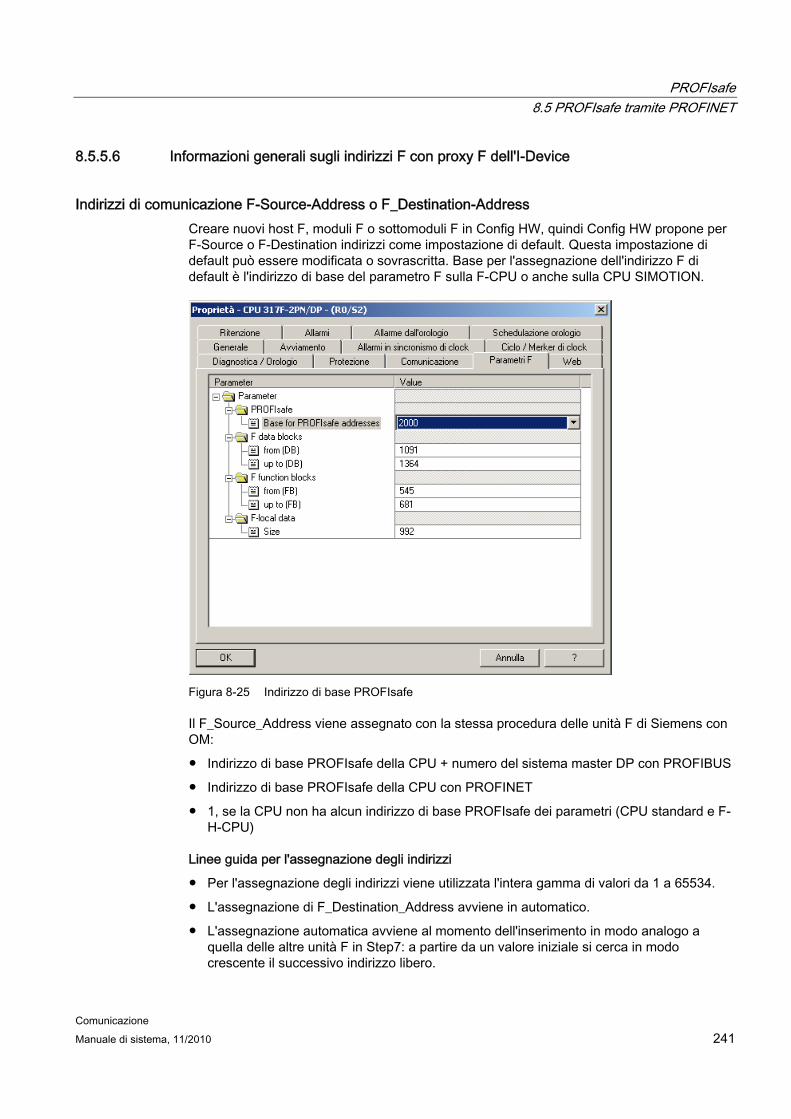
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 241
8.5.5.6 Informazioni generali sugli indirizzi F con proxy F dell'I-Device
Indirizzi di comunicazione F-Source-Address o F_Destination-Address Creare nuovi host F, moduli F o sottomoduli F in Config HW, quindi Config HW propone per F-Source o F-Destination indirizzi come impostazione di default. Questa impostazione di default può essere modificata o sovrascritta. Base per l'assegnazione dell'indirizzo F di default è l'indirizzo di base del parametro F sulla F-CPU o anche sulla CPU SIMOTION.
Figura 8-25 Indirizzo di base PROFIsafe
Il F_Source_Address viene assegnato con la stessa procedura delle unità F di Siemens con OM:
● Indirizzo di base PROFIsafe della CPU + numero del sistema master DP con PROFIBUS
● Indirizzo di base PROFIsafe della CPU con PROFINET
● 1, se la CPU non ha alcun indirizzo di base PROFIsafe dei parametri (CPU standard e F-H-CPU)
Linee guida per l'assegnazione degli indirizzi
● Per l'assegnazione degli indirizzi viene utilizzata l'intera gamma di valori da 1 a 65534.
● L'assegnazione di F_Destination_Address avviene in automatico.
● L'assegnazione automatica avviene al momento dell'inserimento in modo analogo a quella delle altre unità F in Step7: a partire da un valore iniziale si cerca in modo crescente il successivo indirizzo libero.
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 242 Manuale di sistema, 11/2010
● Il valore iniziale è l'indirizzo di base PROFIsafe della CPU/10 (oppure 1022, se non esiste alcun indirizzo di base PROFIsafe o il suo valore è superiore a 10000).
● Se avviene una modifica dell'indirizzo di base F (parametro della CPU), gli indirizzi F-Source e F-Dest già assegnati non vengono spostati (restano tali e quali). La modifica ha effetto solo sull'indirizzo di default dei nuovi sottomoduli creati.
● In una F-CPU possono essere assegnati più indirizzi F-Source. L'indirizzo F-Source confluisce, come l'indirizzo F-Dest, nella somma CRC di PROFIsafe.
● Se gli indirizzi scompaiono da un'area di indirizzi assegnata (a causa di una cancellazione successiva di sottomoduli F), in caso di nuova assegnazione di indirizzi vengono dapprima occupate le interruzioni.
Nota
Se si desidera lavorare in modo sensato con Safety tramite i limiti del progetto o i proxy, occorre assicurarsi che gli indirizzi F-Source e F-Destination siano stati assegnati nel progetto totale in modo univoco. Prima dell'inizio della progettazione sarebbe bene avere/creare un piano degli indirizzi F, in cui ordinare in determinati progetti parziali aree di indirizzi F univoche.
8.5.6 Shared Device tramite PROFINET
8.5.6.1 Informazioni generali su Shared Device
Descrizione Con la nuova funzionalità Shared Device è possibile configurare tramite PROFINET l'accesso a un IO-Device di più IO-Controller. Ciò consente un'assegnazione flessibile di canali/moduli a diversi IO-Controller ed è possibile per ingressi e uscite. È possibile impiegare questo meccanismo ad es. per poter accedere tramite la F-CPU ai dati F di un azionamento, progettato sotto una CPU SIMOTION.
Nota
Per la progettazione di PROFIsafe si consiglia la progettazione con la funzionalità proxy F dell'I-Device al posto di Shared Device.
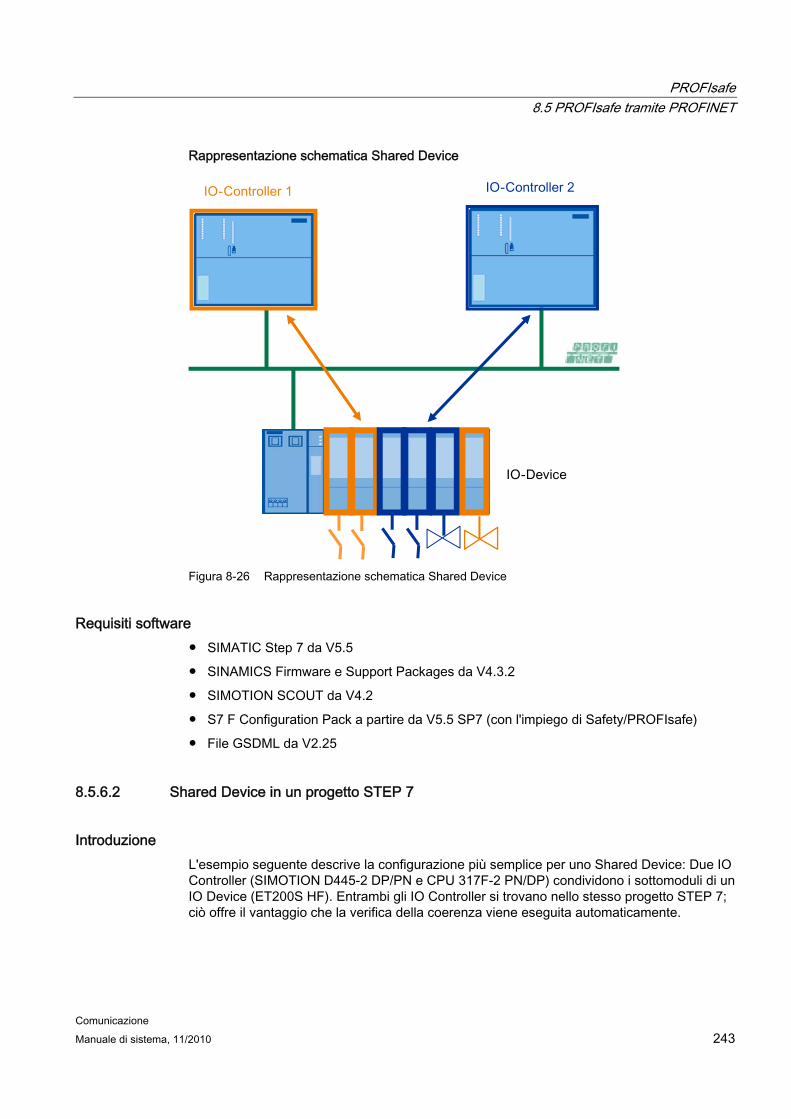
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 243
Rappresentazione schematica Shared Device
Figura 8-26 Rappresentazione schematica Shared Device
Requisiti software ● SIMATIC Step 7 da V5.5
● SINAMICS Firmware e Support Packages da V4.3.2
● SIMOTION SCOUT da V4.2
● S7 F Configuration Pack a partire da V5.5 SP7 (con l'impiego di Safety/PROFIsafe)
● File GSDML da V2.25
8.5.6.2 Shared Device in un progetto STEP 7
Introduzione L'esempio seguente descrive la configurazione più semplice per uno Shared Device: Due IO Controller (SIMOTION D445-2 DP/PN e CPU 317F-2 PN/DP) condividono i sottomoduli di un IO Device (ET200S HF). Entrambi gli IO Controller si trovano nello stesso progetto STEP 7; ciò offre il vantaggio che la verifica della coerenza viene eseguita automaticamente.
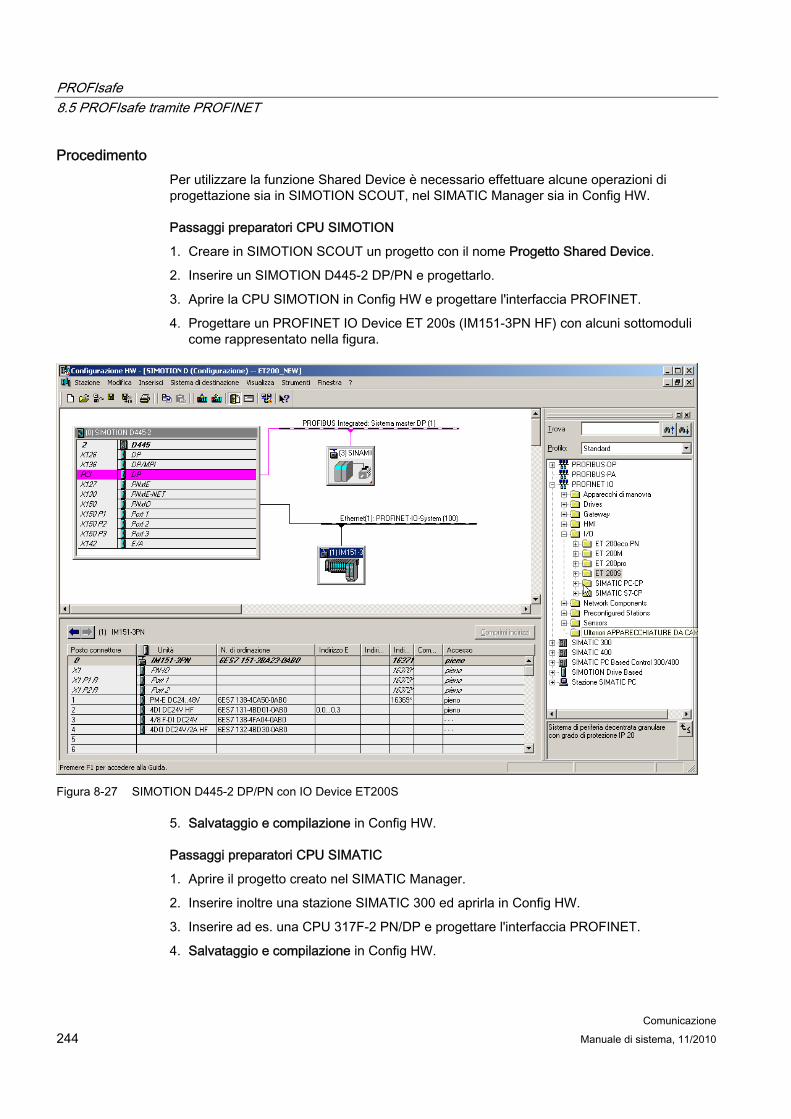
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 244 Manuale di sistema, 11/2010
Procedimento Per utilizzare la funzione Shared Device è necessario effettuare alcune operazioni di progettazione sia in SIMOTION SCOUT, nel SIMATIC Manager sia in Config HW.
Passaggi preparatori CPU SIMOTION
1. Creare in SIMOTION SCOUT un progetto con il nome Progetto Shared Device.
2. Inserire un SIMOTION D445-2 DP/PN e progettarlo.
3. Aprire la CPU SIMOTION in Config HW e progettare l'interfaccia PROFINET.
4. Progettare un PROFINET IO Device ET 200s (IM151-3PN HF) con alcuni sottomoduli come rappresentato nella figura.
Figura 8-27 SIMOTION D445-2 DP/PN con IO Device ET200S
5. Salvataggio e compilazione in Config HW.
Passaggi preparatori CPU SIMATIC
1. Aprire il progetto creato nel SIMATIC Manager.
2. Inserire inoltre una stazione SIMATIC 300 ed aprirla in Config HW.
3. Inserire ad es. una CPU 317F-2 PN/DP e progettare l'interfaccia PROFINET.
4. Salvataggio e compilazione in Config HW.
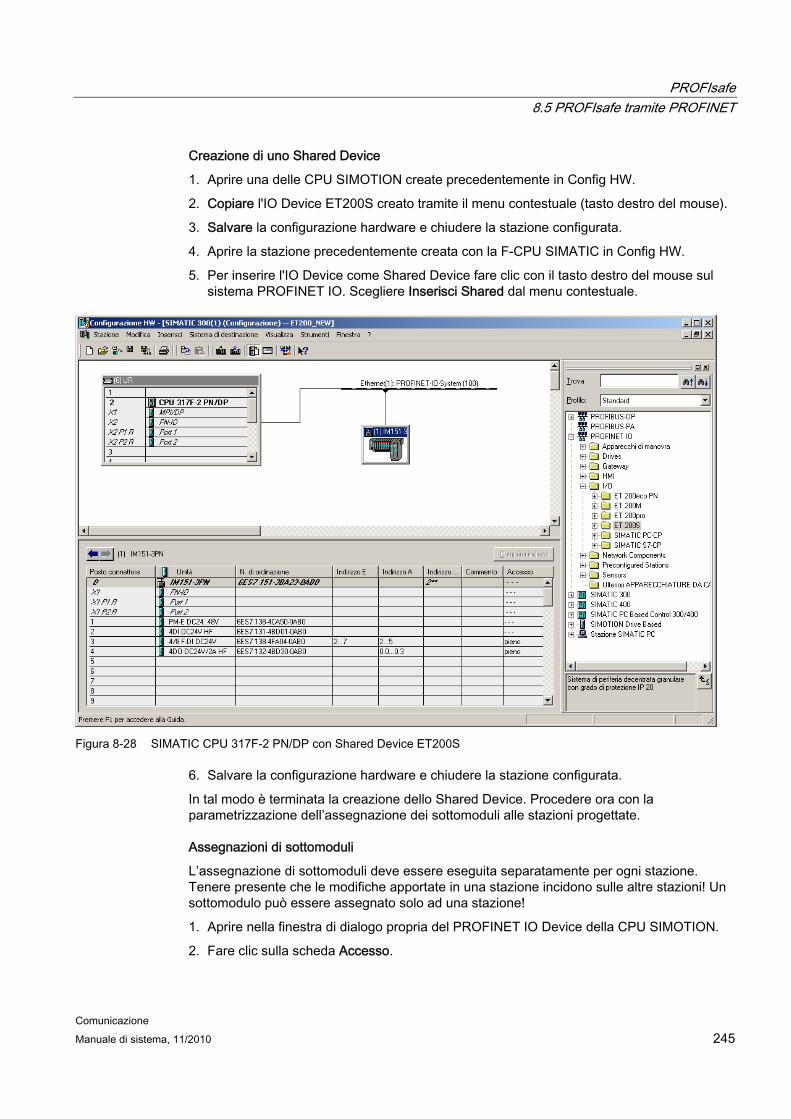
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 245
Creazione di uno Shared Device
1. Aprire una delle CPU SIMOTION create precedentemente in Config HW.
2. Copiare l'IO Device ET200S creato tramite il menu contestuale (tasto destro del mouse).
3. Salvare la configurazione hardware e chiudere la stazione configurata.
4. Aprire la stazione precedentemente creata con la F-CPU SIMATIC in Config HW.
5. Per inserire l'IO Device come Shared Device fare clic con il tasto destro del mouse sul sistema PROFINET IO. Scegliere Inserisci Shared dal menu contestuale.
Figura 8-28 SIMATIC CPU 317F-2 PN/DP con Shared Device ET200S
6. Salvare la configurazione hardware e chiudere la stazione configurata.
In tal modo è terminata la creazione dello Shared Device. Procedere ora con la parametrizzazione dell’assegnazione dei sottomoduli alle stazioni progettate.
Assegnazioni di sottomoduli
L’assegnazione di sottomoduli deve essere eseguita separatamente per ogni stazione. Tenere presente che le modifiche apportate in una stazione incidono sulle altre stazioni! Un sottomodulo può essere assegnato solo ad una stazione!
1. Aprire nella finestra di dialogo propria del PROFINET IO Device della CPU SIMOTION.
2. Fare clic sulla scheda Accesso.
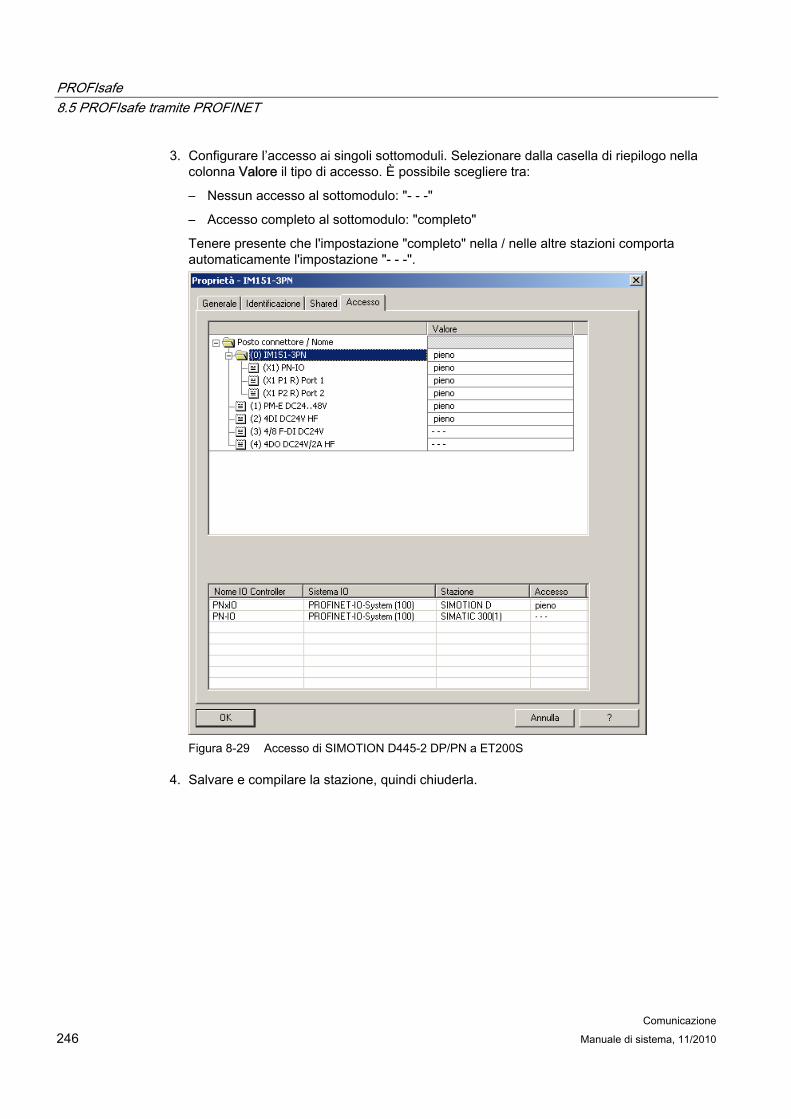
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 246 Manuale di sistema, 11/2010
3. Configurare l’accesso ai singoli sottomoduli. Selezionare dalla casella di riepilogo nella colonna Valore il tipo di accesso. È possibile scegliere tra:
– Nessun accesso al sottomodulo: "- - -"
– Accesso completo al sottomodulo: "completo"
Tenere presente che l'impostazione "completo" nella / nelle altre stazioni comporta automaticamente l'impostazione "- - -".
Figura 8-29 Accesso di SIMOTION D445-2 DP/PN a ET200S
4. Salvare e compilare la stazione, quindi chiuderla.
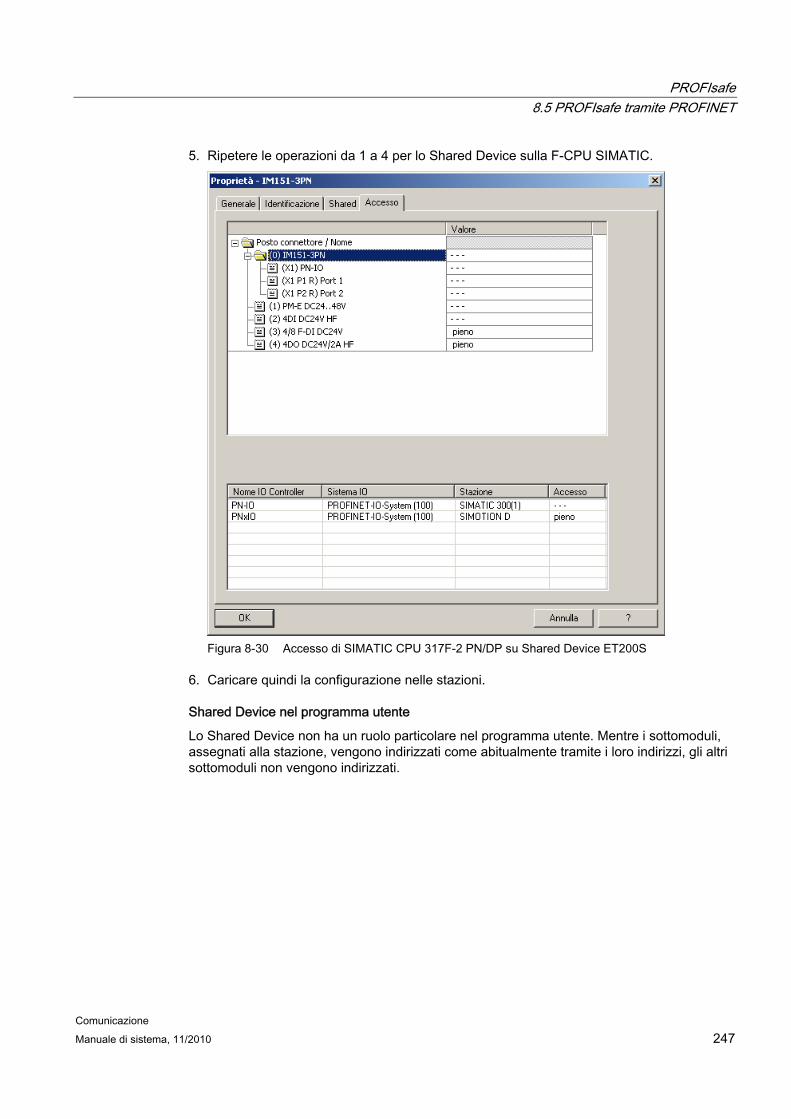
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 247
5. Ripetere le operazioni da 1 a 4 per lo Shared Device sulla F-CPU SIMATIC.
Figura 8-30 Accesso di SIMATIC CPU 317F-2 PN/DP su Shared Device ET200S
6. Caricare quindi la configurazione nelle stazioni.
Shared Device nel programma utente
Lo Shared Device non ha un ruolo particolare nel programma utente. Mentre i sottomoduli, assegnati alla stazione, vengono indirizzati come abitualmente tramite i loro indirizzi, gli altri sottomoduli non vengono indirizzati.
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 248 Manuale di sistema, 11/2010
8.5.6.3 Progettazione di C240 PN e F-CPU con S120 come Shared Device
Descrizione Questo capitolo presenta linee guida generali sulla progettazione di un SINAMICS S120 come Shared Device. Nell'esempio vengono eseguiti i task Motion Control tramite il SIMOTION C240 PN e il monitoraggio PROFIsafe con una F-CPU SIMATIC, ad es. 317F-2PN/DP.
Nota Limitazioni
L'utilizzo della funzione Shared Device con SINAMICS su SIMOTION presenta attualmente ancora limitazioni. L'impiego di Shared Device con SINAMICS su SIMOTION avviene soltanto impiegando i file GSD per SINAMICS con la progettazione dell'azionamento in Config HW, nessun Device OM. In questo modo i meccanismi di sincronizzazione tra Config HW di SCOUT Starter non sono possibili. Nelle singole operazioni di progettazione occorre provvedere manualmente alla coerenza nella progettazione del telegramma.
Pertanto la seguente istruzione di progettazione deve essere vista soltanto come ulteriore spiegazione della funzionalità Shared Device. Per l'utilizzo di PROFIsafe su PROFINET con SIMOTION e SINAMICS occorre impiegare sempre la comunicazione tramite il proxy F dell'I-Device, come descritto nel capitolo Concetti fondamentali del proxy F dell'I-Device (Pagina 217).
Come si progetta uno Shared Device nell'esempio con SINAMICS S120 e SIMOTION C240 PN? 1. Creare in SIMOTION SCOUT un nuovo progetto con un SIMOTION C240 PN.
2. Aprire l'hardware in Config HW e progettare il C240 PN come IRT master Sync.
3. Installare il file GSD di S120. Questo si trova come ZIP sulla scheda CF dell'azionamento nella cartella SIEMENS\SIMATIC\DATA\CFG\ ad es. CBE20GSD.ZIP.
4. Trascinare per Drag&Drop il GSD installato dal catalogo hardware PROFINET IO/SINAMICS/GSD/SINAMICS S120/S150 CU320-2 PN Shared Device alla rete PROFINET.
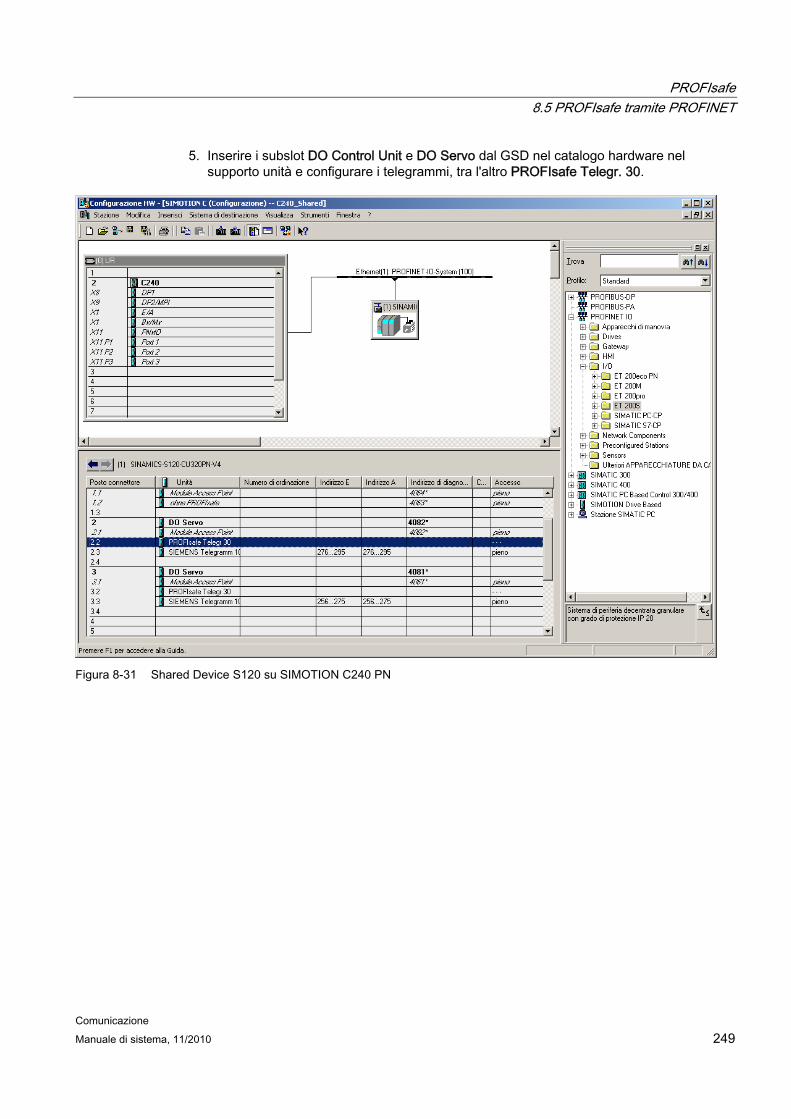
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 249
5. Inserire i subslot DO Control Unit e DO Servo dal GSD nel catalogo hardware nel supporto unità e configurare i telegrammi, tra l'altro PROFIsafe Telegr. 30.
Figura 8-31 Shared Device S120 su SIMOTION C240 PN
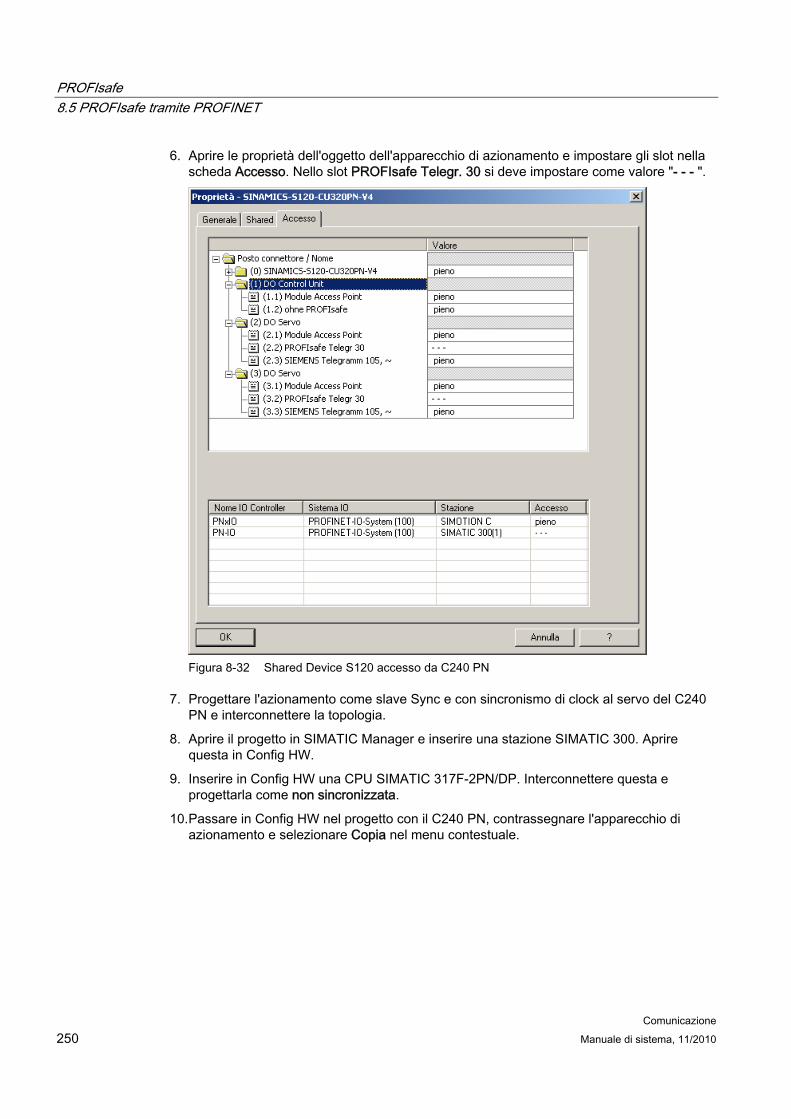
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 250 Manuale di sistema, 11/2010
6. Aprire le proprietà dell'oggetto dell'apparecchio di azionamento e impostare gli slot nella scheda Accesso. Nello slot PROFIsafe Telegr. 30 si deve impostare come valore "- - - ".
Figura 8-32 Shared Device S120 accesso da C240 PN
7. Progettare l'azionamento come slave Sync e con sincronismo di clock al servo del C240 PN e interconnettere la topologia.
8. Aprire il progetto in SIMATIC Manager e inserire una stazione SIMATIC 300. Aprire questa in Config HW.
9. Inserire in Config HW una CPU SIMATIC 317F-2PN/DP. Interconnettere questa e progettarla come non sincronizzata.
10. Passare in Config HW nel progetto con il C240 PN, contrassegnare l'apparecchio di azionamento e selezionare Copia nel menu contestuale.
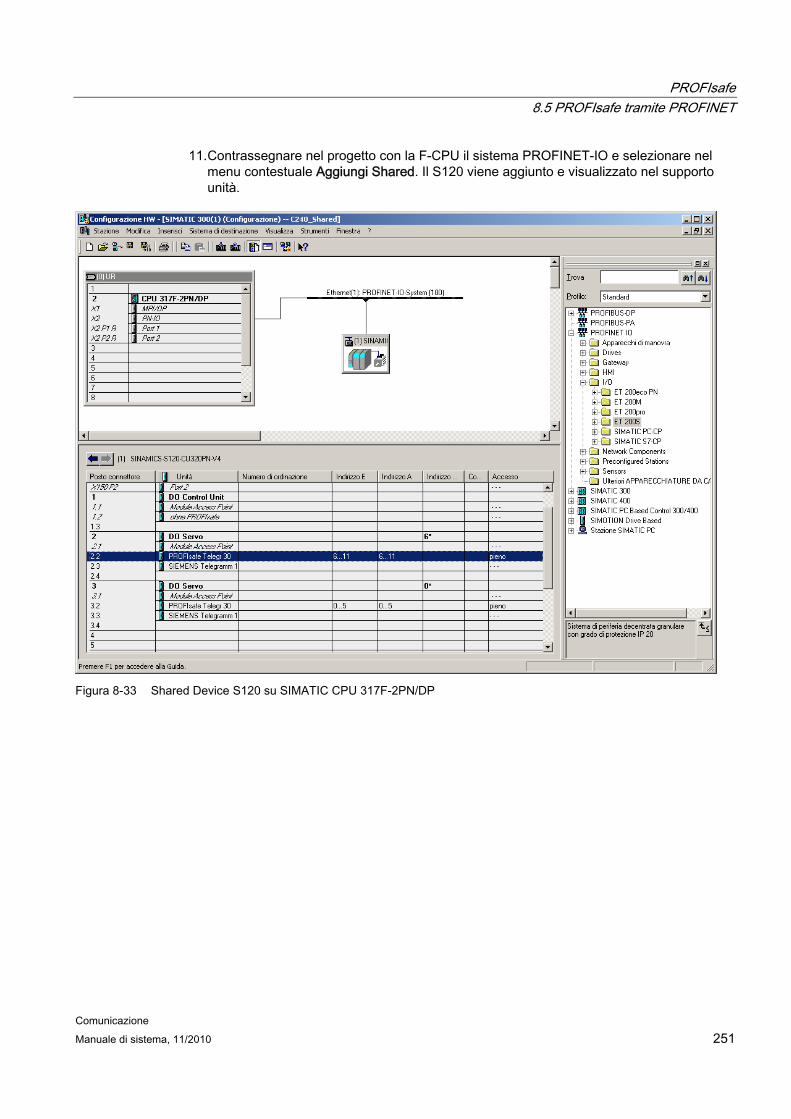
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 251
11. Contrassegnare nel progetto con la F-CPU il sistema PROFINET-IO e selezionare nel menu contestuale Aggiungi Shared. Il S120 viene aggiunto e visualizzato nel supporto unità.
Figura 8-33 Shared Device S120 su SIMATIC CPU 317F-2PN/DP
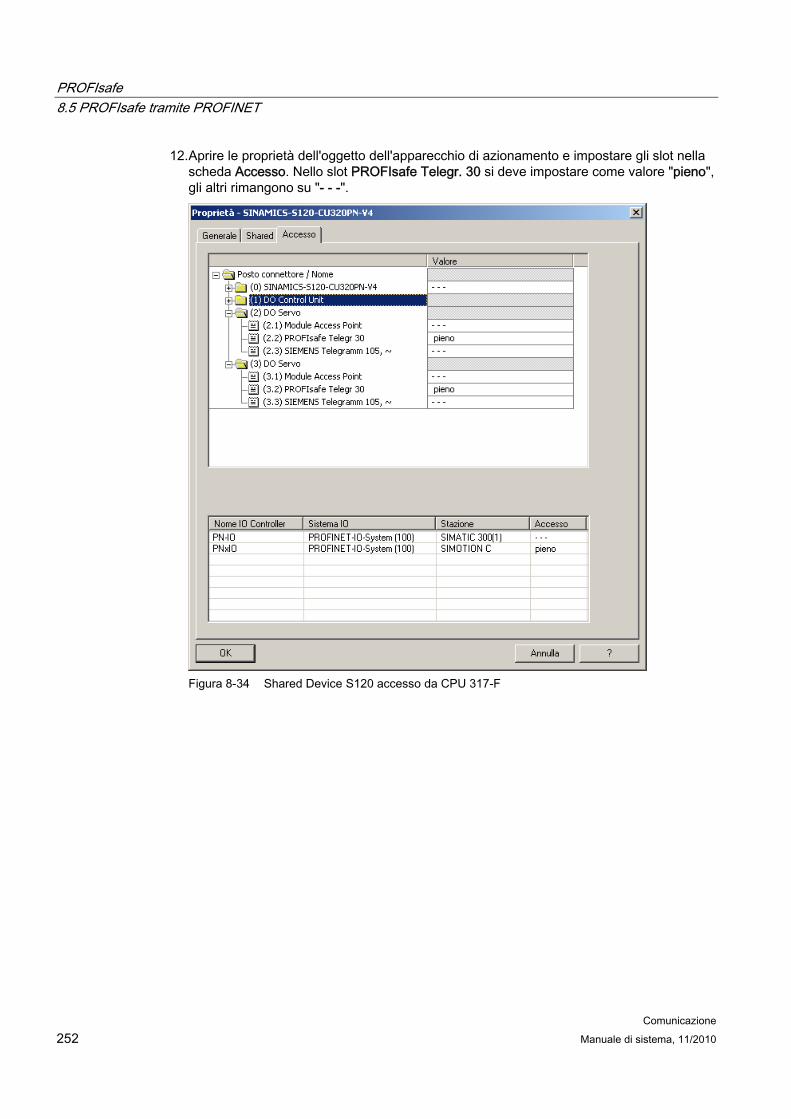
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione 252 Manuale di sistema, 11/2010
12. Aprire le proprietà dell'oggetto dell'apparecchio di azionamento e impostare gli slot nella scheda Accesso. Nello slot PROFIsafe Telegr. 30 si deve impostare come valore "pieno", gli altri rimangono su "- - -".
Figura 8-34 Shared Device S120 accesso da CPU 317-F
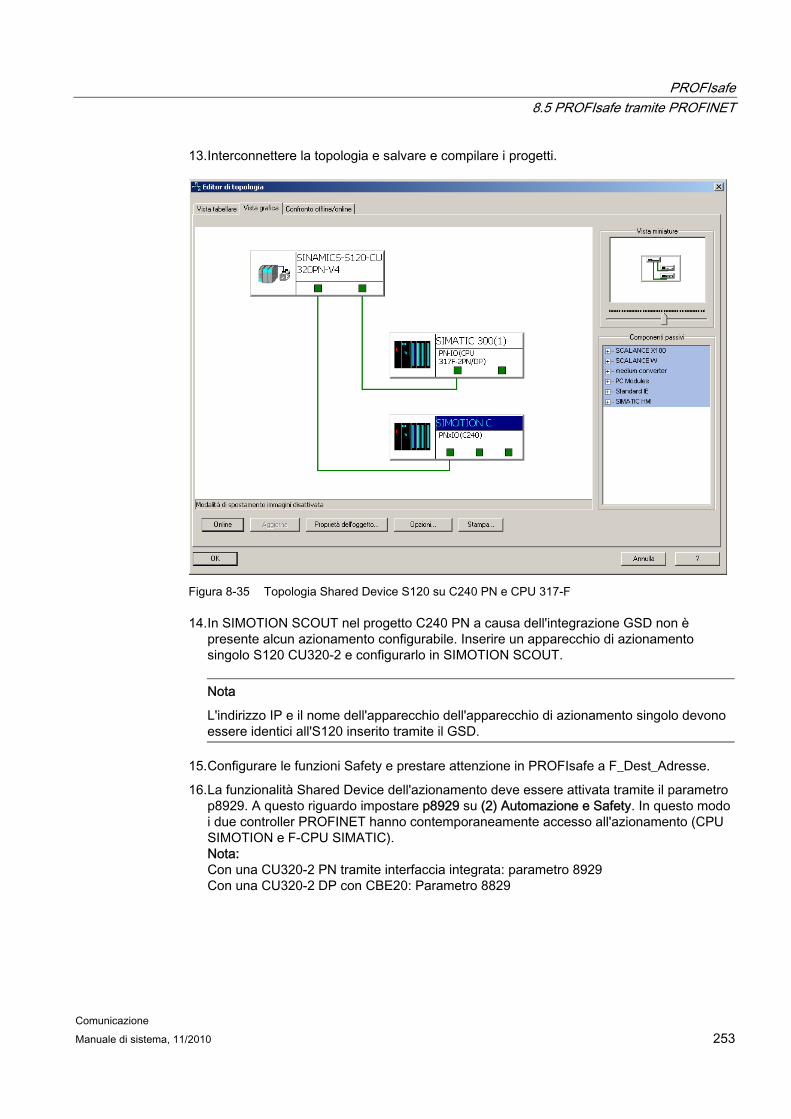
PROFIsafe 8.5 PROFIsafe tramite PROFINET
Comunicazione Manuale di sistema, 11/2010 253
13. Interconnettere la topologia e salvare e compilare i progetti.
Figura 8-35 Topologia Shared Device S120 su C240 PN e CPU 317-F
14. In SIMOTION SCOUT nel progetto C240 PN a causa dell'integrazione GSD non è presente alcun azionamento configurabile. Inserire un apparecchio di azionamento singolo S120 CU320-2 e configurarlo in SIMOTION SCOUT.
Nota
L'indirizzo IP e il nome dell'apparecchio dell'apparecchio di azionamento singolo devono essere identici all'S120 inserito tramite il GSD.
15. Configurare le funzioni Safety e prestare attenzione in PROFIsafe a F_Dest_Adresse.
16. La funzionalità Shared Device dell'azionamento deve essere attivata tramite il parametro p8929. A questo riguardo impostare p8929 su (2) Automazione e Safety. In questo modo i due controller PROFINET hanno contemporaneamente accesso all'azionamento (CPU SIMOTION e F-CPU SIMATIC). Nota: Con una CU320-2 PN tramite interfaccia integrata: parametro 8929 Con una CU320-2 DP con CBE20: Parametro 8829
PROFIsafe 8.6 PROFIsafe tramite PROFIBUS
Comunicazione 254 Manuale di sistema, 11/2010
8.6 PROFIsafe tramite PROFIBUS
8.6.1 Informazioni generali per PROFIsafe su PROFIBUS
Due possibilità per PROFIsafe In linea di principio sono disponibili due possibilità per la comunicazione PROFIsafe su PROFIBUS:
● Proxy F dell'I-Slave
La F-CPU è master DP nel progetto e sorveglia gli azionamenti sul progetto SIMOTION I-Slave sottoposto.
● Traffico trasversale F
SIMOTION è master DP nel progetto e la F-CPU sorveglia come I-Slave gli azionamenti.
La procedura in fase di progettazione della comunicazione PROFIsafe è, per il resto, identica. Nei seguenti capitoli viene presentato un breve esempio per ciascuna opzione.
8.6.2 Apparecchi supportati e requisiti software PROFIsafe su PROFIBUS
Pacchetti software richiesti sull'apparecchio di programmazione: ● SIMATIC Manager STEP7 a partire dalla versione 5.4 SP2
● S7 F Configuration Pack a partire dalla versione 5.5 SP3
● S7 Distributed Safety Programming a partire dalla versione 5.4 SP3
● SIMOTION SCOUT a partire dalla versione 4.1.1 HF6
● SINAMICS Firmware a partire dalla versione 2.5
Nota
A partire dal firmware SIMOTION 4.1.1 HF10 e dal firmware SINAMICS 2.5 SP1 HF10 è possibile progettare 5 azionamenti con un CX32. Con versioni precedenti del firmware si possono progettare al massimo 4 azionamenti.
I componenti idonei per PROFIsafe sono descritti nel Manuale di guida alle funzioni S120 Safety Integrated.
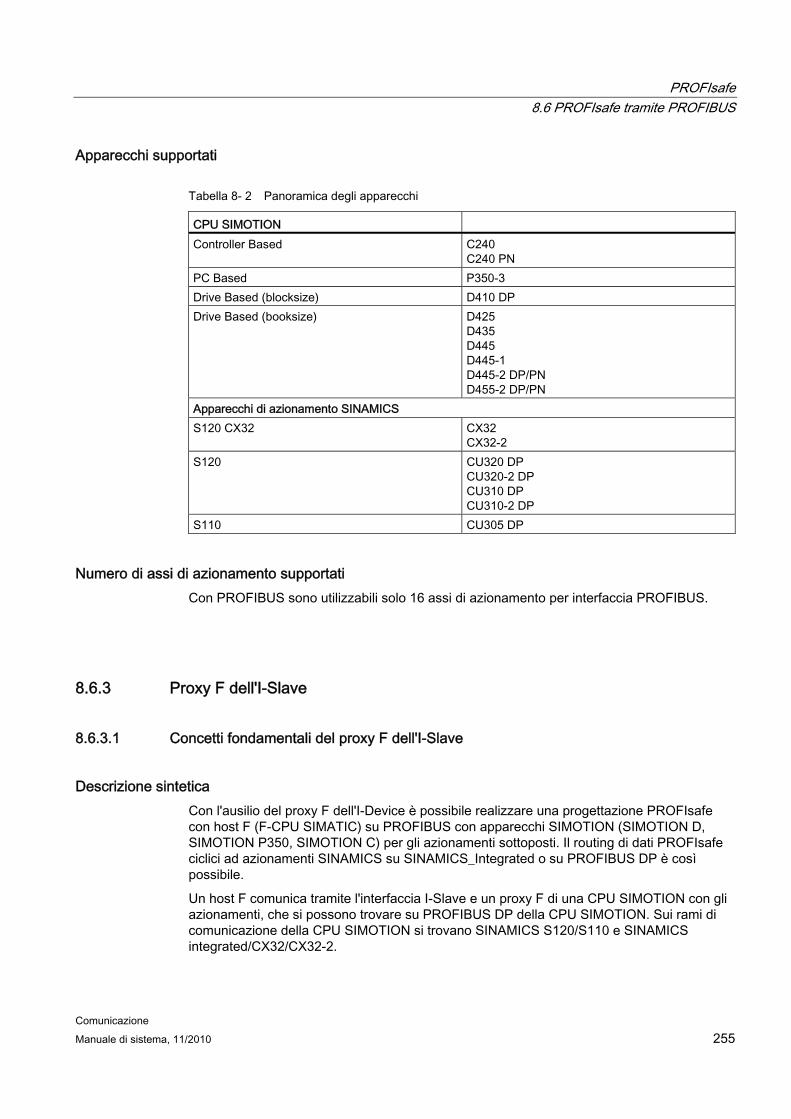
PROFIsafe 8.6 PROFIsafe tramite PROFIBUS
Comunicazione Manuale di sistema, 11/2010 255
Apparecchi supportati
Tabella 8- 2 Panoramica degli apparecchi
CPU SIMOTION Controller Based C240
C240 PN PC Based P350-3 Drive Based (blocksize) D410 DP Drive Based (booksize) D425
D435 D445 D445-1 D445-2 DP/PN D455-2 DP/PN
Apparecchi di azionamento SINAMICS S120 CX32 CX32
CX32-2 S120 CU320 DP
CU320-2 DP CU310 DP CU310-2 DP
S110 CU305 DP
Numero di assi di azionamento supportati Con PROFIBUS sono utilizzabili solo 16 assi di azionamento per interfaccia PROFIBUS.
8.6.3 Proxy F dell'I-Slave
8.6.3.1 Concetti fondamentali del proxy F dell'I-Slave
Descrizione sintetica Con l'ausilio del proxy F dell'I-Device è possibile realizzare una progettazione PROFIsafe con host F (F-CPU SIMATIC) su PROFIBUS con apparecchi SIMOTION (SIMOTION D, SIMOTION P350, SIMOTION C) per gli azionamenti sottoposti. Il routing di dati PROFIsafe ciclici ad azionamenti SINAMICS su SINAMICS_Integrated o su PROFIBUS DP è così possibile.
Un host F comunica tramite l'interfaccia I-Slave e un proxy F di una CPU SIMOTION con gli azionamenti, che si possono trovare su PROFIBUS DP della CPU SIMOTION. Sui rami di comunicazione della CPU SIMOTION si trovano SINAMICS S120/S110 e SINAMICS integrated/CX32/CX32-2.
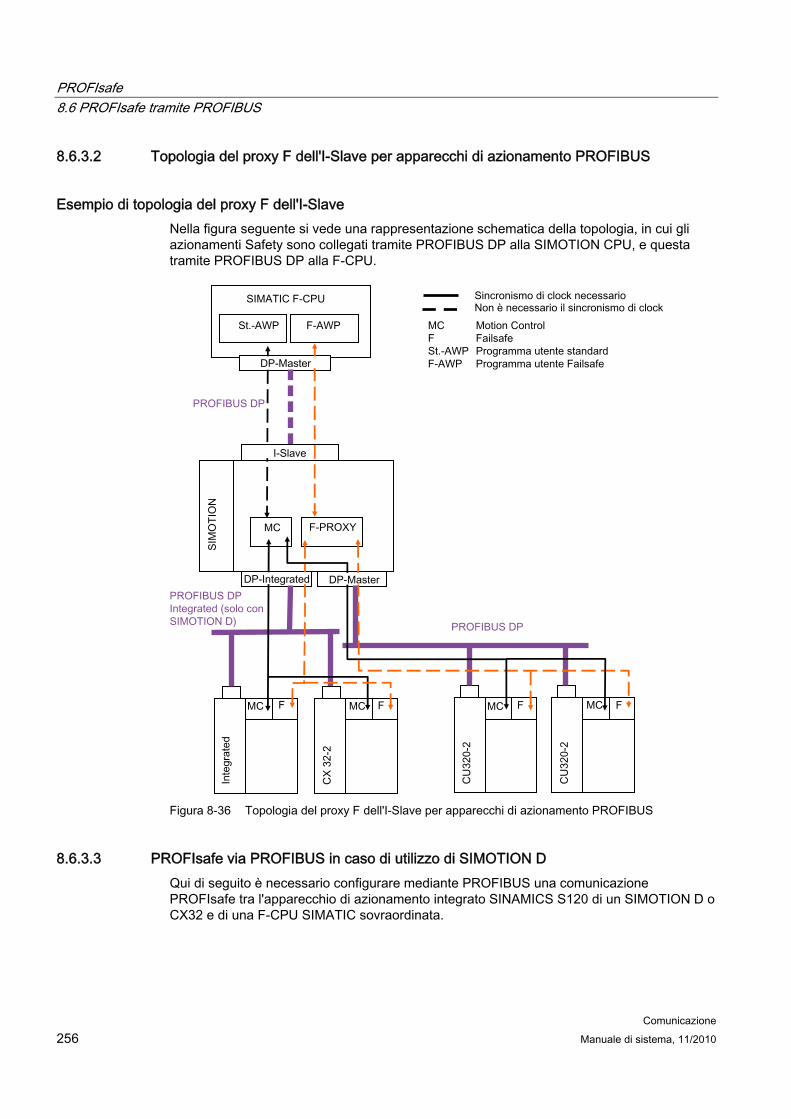
PROFIsafe 8.6 PROFIsafe tramite PROFIBUS
Comunicazione 256 Manuale di sistema, 11/2010
8.6.3.2 Topologia del proxy F dell'I-Slave per apparecchi di azionamento PROFIBUS
Esempio di topologia del proxy F dell'I-Slave Nella figura seguente si vede una rappresentazione schematica della topologia, in cui gli azionamenti Safety sono collegati tramite PROFIBUS DP alla SIMOTION CPU, e questa tramite PROFIBUS DP alla F-CPU.
Figura 8-36 Topologia del proxy F dell'I-Slave per apparecchi di azionamento PROFIBUS
8.6.3.3 PROFIsafe via PROFIBUS in caso di utilizzo di SIMOTION D Qui di seguito è necessario configurare mediante PROFIBUS una comunicazione PROFIsafe tra l'apparecchio di azionamento integrato SINAMICS S120 di un SIMOTION D o CX32 e di una F-CPU SIMATIC sovraordinata.
PROFIsafe 8.6 PROFIsafe tramite PROFIBUS
Comunicazione Manuale di sistema, 11/2010 257
Struttura della topologia (struttura della progettazione) La topologia fondamentale dei componenti coinvolti nella comunicazione PROFIsafe tramite PROFIBUS (F-CPU SIMATIC e D4x5 integrato con SINAMICS S120 o CU320) si trova nel precedente capitolo.
L'apparecchio di azionamento (SINAMICS) e F-CPU SIMATIC si trovano su diverse sottoreti PROFIBUS. In questo caso viene configurato un passaggio di rete PROFIsafe su SIMOTION D, affinché i dati necessari vengono copiati da una rete nell'altra (vedere a riguardo anche il punto 7).
Progettazione della comunicazione PROFIsafe Qui di seguito viene descritta la progettazione di una comunicazione PROFIsafe tra un oggetto di azionamento di un apparecchio di azionamento SINAMICS integrato di un SIMOTION D e una F-CPU SIMATIC. Il procedimento per la progettazione di una comunicazione PROFIsafe tra un apparecchio di azionamento di un CU320 e una F-CPU SIMATIC è in linea di principio identico e non viene descritto separatamente.
1. In Config HW creare, in base all'hardware presente, una F-CPU (ad es. CPU 317F-2) e un controllo SIMOTION D4x5 (con SINAMICS 120 integrato).
2. Definire la CPU SIMOTION desiderata quale slave DP e la F-CPU collegata quale relativo master DP.
3. Configurare l'apparecchio di azionamento SINAMICS con SIMOTION SCOUT conformemente alla struttura hardware presente.
4. Immettere pertanto un nuovo TO asse ed eseguire il wizard assi. Nel wizard interconnettere l'asse al corrispondente oggetto di azionamento dell'S120 ed automaticamente viene creato un corrispondente telegramma (assegnazione simbolica).
5. Salvare e compilare il progetto.
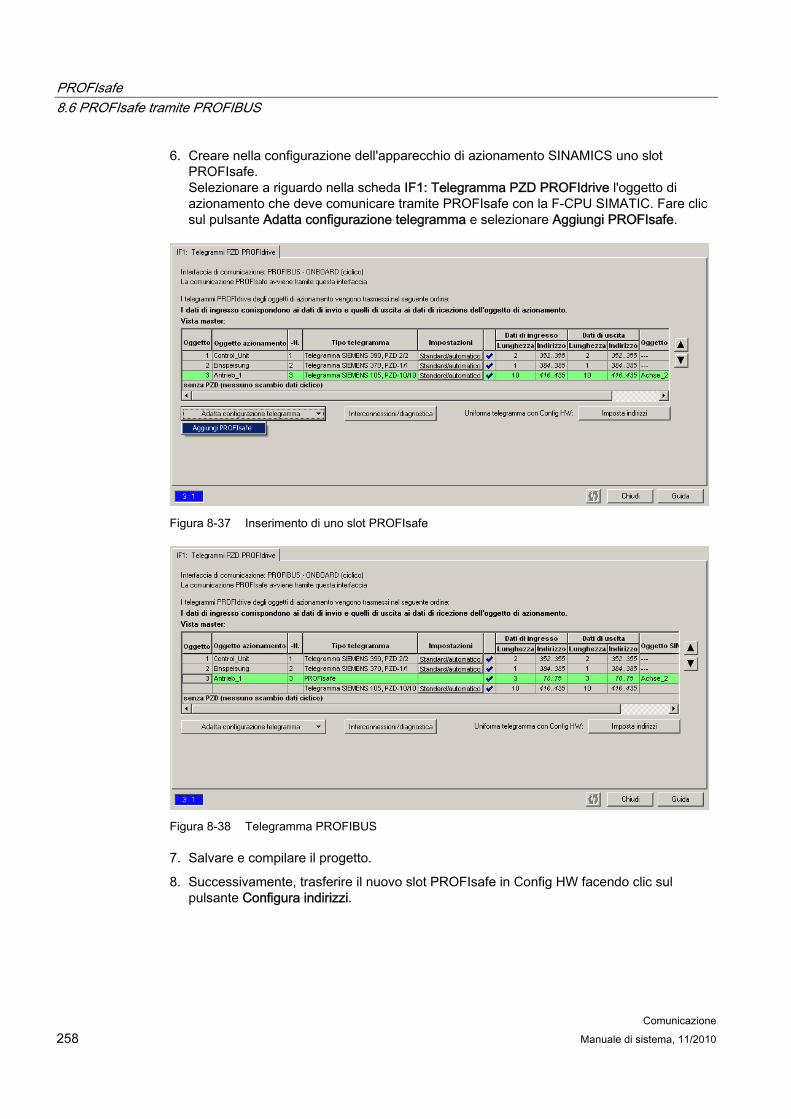
PROFIsafe 8.6 PROFIsafe tramite PROFIBUS
Comunicazione 258 Manuale di sistema, 11/2010
6. Creare nella configurazione dell'apparecchio di azionamento SINAMICS uno slot PROFIsafe. Selezionare a riguardo nella scheda IF1: Telegramma PZD PROFIdrive l'oggetto di azionamento che deve comunicare tramite PROFIsafe con la F-CPU SIMATIC. Fare clic sul pulsante Adatta configurazione telegramma e selezionare Aggiungi PROFIsafe.
Figura 8-37 Inserimento di uno slot PROFIsafe
Figura 8-38 Telegramma PROFIBUS
7. Salvare e compilare il progetto.
8. Successivamente, trasferire il nuovo slot PROFIsafe in Config HW facendo clic sul pulsante Configura indirizzi.
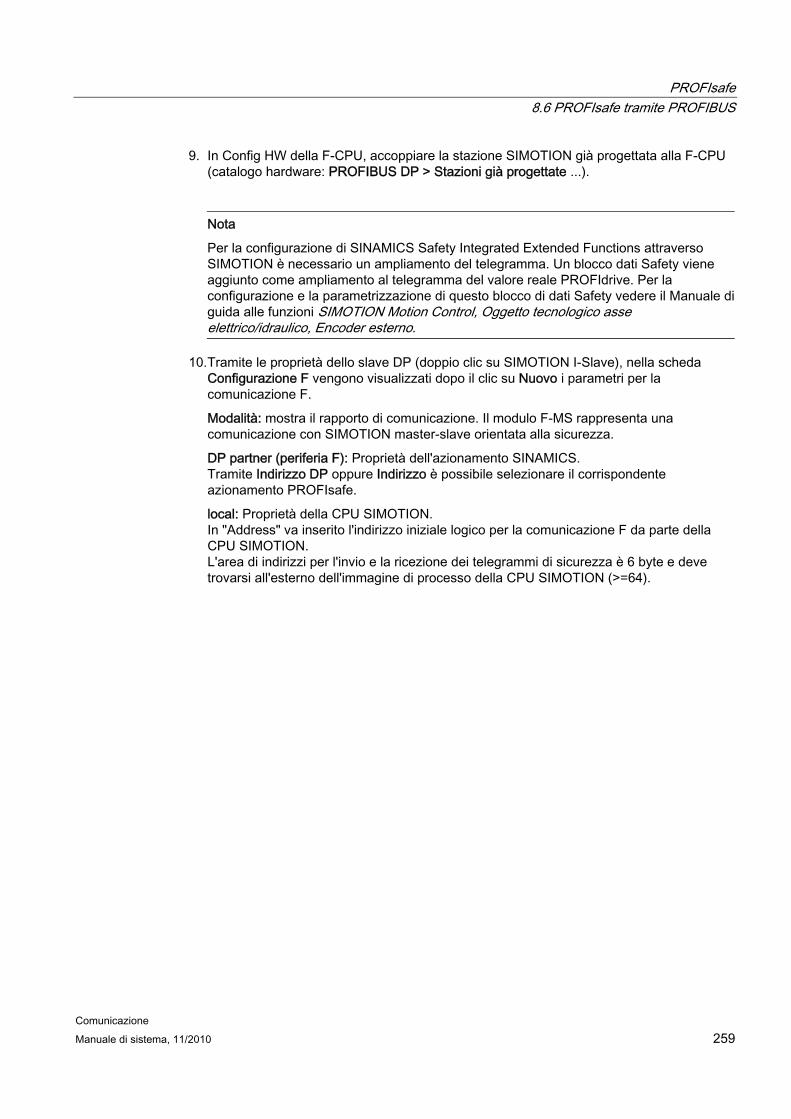
PROFIsafe 8.6 PROFIsafe tramite PROFIBUS
Comunicazione Manuale di sistema, 11/2010 259
9. In Config HW della F-CPU, accoppiare la stazione SIMOTION già progettata alla F-CPU (catalogo hardware: PROFIBUS DP > Stazioni già progettate ...).
Nota
Per la configurazione di SINAMICS Safety Integrated Extended Functions attraverso SIMOTION è necessario un ampliamento del telegramma. Un blocco dati Safety viene aggiunto come ampliamento al telegramma del valore reale PROFIdrive. Per la configurazione e la parametrizzazione di questo blocco di dati Safety vedere il Manuale di guida alle funzioni SIMOTION Motion Control, Oggetto tecnologico asse elettrico/idraulico, Encoder esterno.
10. Tramite le proprietà dello slave DP (doppio clic su SIMOTION I-Slave), nella scheda Configurazione F vengono visualizzati dopo il clic su Nuovo i parametri per la comunicazione F.
Modalità: mostra il rapporto di comunicazione. Il modulo F-MS rappresenta una comunicazione con SIMOTION master-slave orientata alla sicurezza.
DP partner (periferia F): Proprietà dell'azionamento SINAMICS. Tramite Indirizzo DP oppure Indirizzo è possibile selezionare il corrispondente azionamento PROFIsafe.
local: Proprietà della CPU SIMOTION. In "Address" va inserito l'indirizzo iniziale logico per la comunicazione F da parte della CPU SIMOTION. L'area di indirizzi per l'invio e la ricezione dei telegrammi di sicurezza è 6 byte e deve trovarsi all'esterno dell'immagine di processo della CPU SIMOTION (>=64).
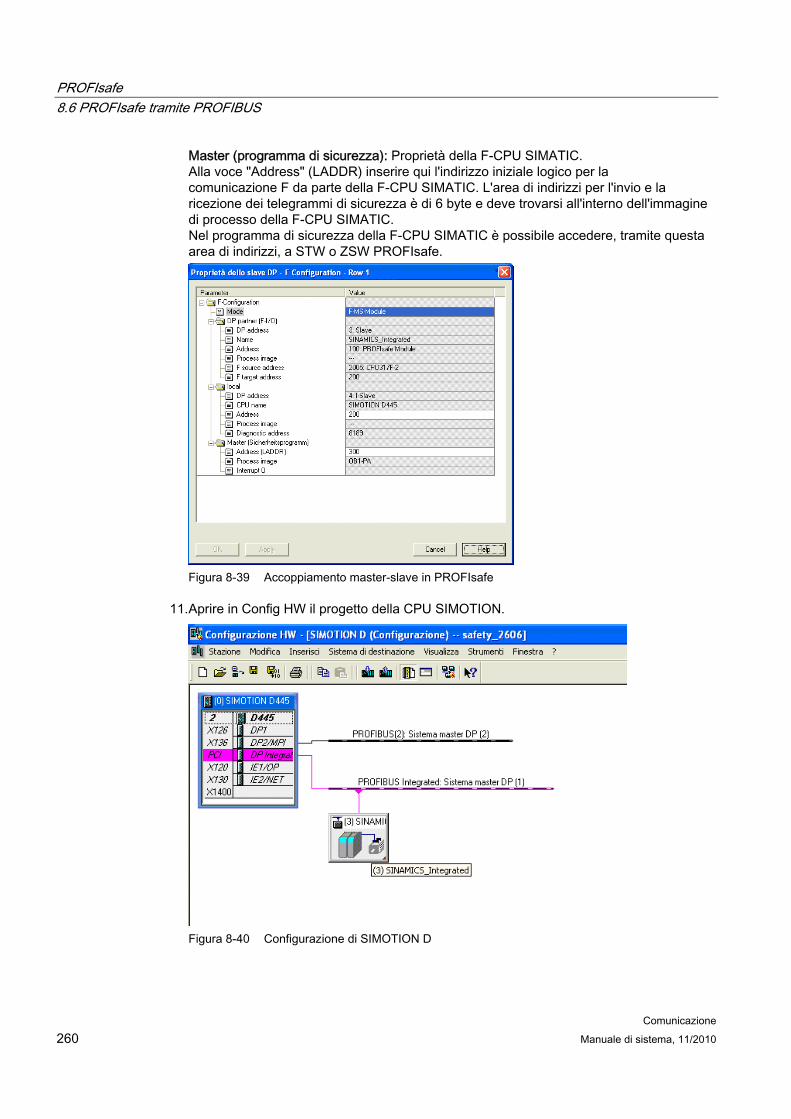
PROFIsafe 8.6 PROFIsafe tramite PROFIBUS
Comunicazione 260 Manuale di sistema, 11/2010
Master (programma di sicurezza): Proprietà della F-CPU SIMATIC. Alla voce "Address" (LADDR) inserire qui l'indirizzo iniziale logico per la comunicazione F da parte della F-CPU SIMATIC. L'area di indirizzi per l'invio e la ricezione dei telegrammi di sicurezza è di 6 byte e deve trovarsi all'interno dell'immagine di processo della F-CPU SIMATIC. Nel programma di sicurezza della F-CPU SIMATIC è possibile accedere, tramite questa area di indirizzi, a STW o ZSW PROFIsafe.
Figura 8-39 Accoppiamento master-slave in PROFIsafe
11. Aprire in Config HW il progetto della CPU SIMOTION.
Figura 8-40 Configurazione di SIMOTION D
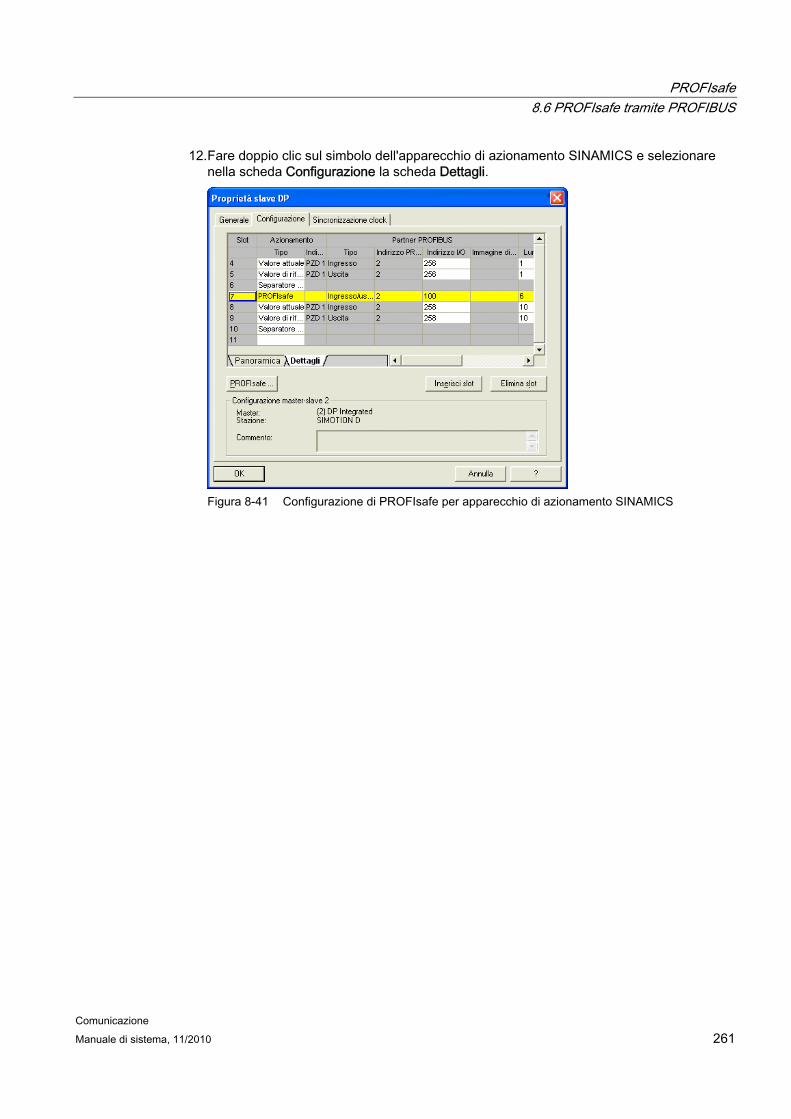
PROFIsafe 8.6 PROFIsafe tramite PROFIBUS
Comunicazione Manuale di sistema, 11/2010 261
12. Fare doppio clic sul simbolo dell'apparecchio di azionamento SINAMICS e selezionare nella scheda Configurazione la scheda Dettagli.
Figura 8-41 Configurazione di PROFIsafe per apparecchio di azionamento SINAMICS
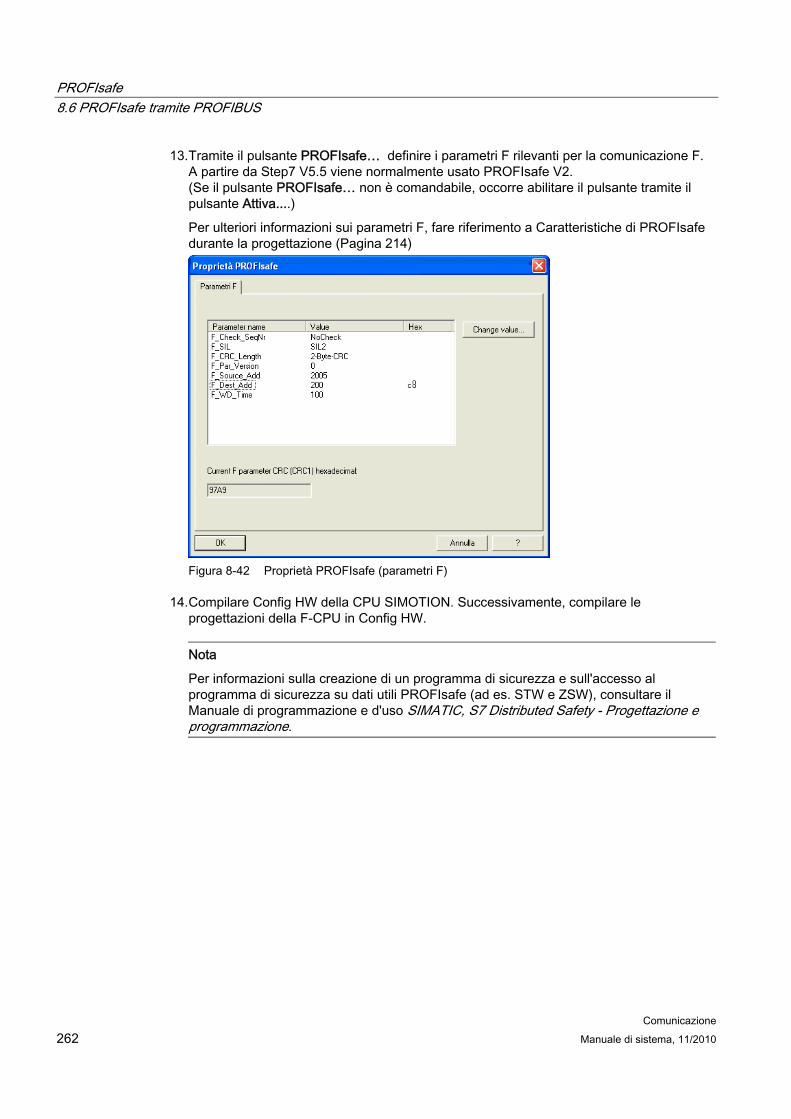
PROFIsafe 8.6 PROFIsafe tramite PROFIBUS
Comunicazione 262 Manuale di sistema, 11/2010
13. Tramite il pulsante PROFIsafe… definire i parametri F rilevanti per la comunicazione F. A partire da Step7 V5.5 viene normalmente usato PROFIsafe V2. (Se il pulsante PROFIsafe… non è comandabile, occorre abilitare il pulsante tramite il pulsante Attiva....)
Per ulteriori informazioni sui parametri F, fare riferimento a Caratteristiche di PROFIsafe durante la progettazione (Pagina 214)
Figura 8-42 Proprietà PROFIsafe (parametri F)
14. Compilare Config HW della CPU SIMOTION. Successivamente, compilare le progettazioni della F-CPU in Config HW.
Nota
Per informazioni sulla creazione di un programma di sicurezza e sull'accesso al programma di sicurezza su dati utili PROFIsafe (ad es. STW e ZSW), consultare il Manuale di programmazione e d'uso SIMATIC, S7 Distributed Safety - Progettazione e programmazione.
PROFIsafe 8.6 PROFIsafe tramite PROFIBUS
Comunicazione Manuale di sistema, 11/2010 263
Progettazione Safety (online) nell'azionamento SINAMICS 1. Tramite la voce "Funzioni" della struttura ad albero, nell'azionamento SINAMICS
richiamare la configurazione per Safety Integrated.
2. Configurare Safety Integrated e impostare sotto gli Indirizzi PROFIsafe dell'azionamento (p9610/p9810) i parametri già definiti F_Dest_Add in rappresentazione esadecimale.
3. Eseguire successivamente un POWER ON. In questo modo la progettazione Safety risulta attiva nell'azionamento.
Nota
Ulteriori informazioni per la progettazione Safety sono riportate nel manuale di guida alle funzioni SINAMICS S120 Safety Integrated.
8.6.4 Traffico trasversale F
8.6.4.1 Concetti fondamentali del traffico trasversale F
Modo di funzionamento La SIMOTION CPU è master DP per un traffico trasversale F. La F-CPU SIMATIC è slave DP su PROFIBUS DP e conduce la comunicazione F ad es. con un CU320 del SINAMICS S120.
Nota
L'indirizzamento del controllo delle funzioni Safety Integrated sul SINAMICS Integrated del SIMOTION D, della Controller Extension CX32/CX32-2 o di un'altra rete DP non risulta possibile in questo caso.
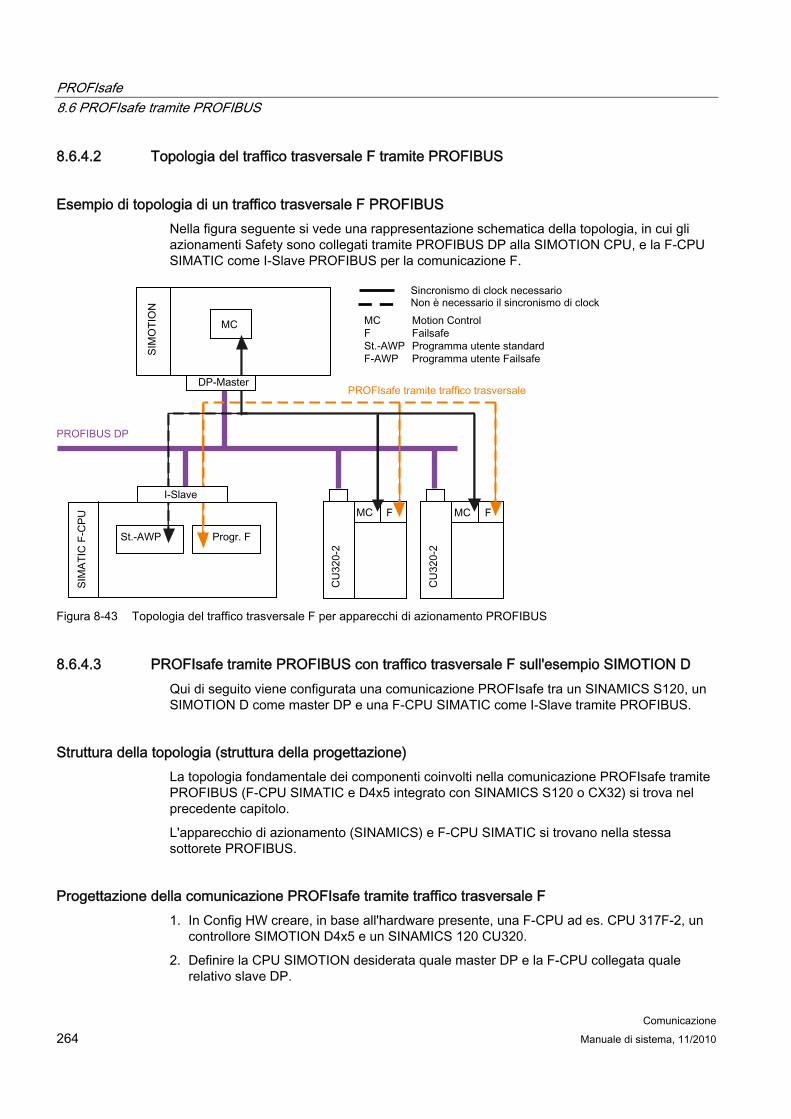
PROFIsafe 8.6 PROFIsafe tramite PROFIBUS
Comunicazione 264 Manuale di sistema, 11/2010
8.6.4.2 Topologia del traffico trasversale F tramite PROFIBUS
Esempio di topologia di un traffico trasversale F PROFIBUS Nella figura seguente si vede una rappresentazione schematica della topologia, in cui gli azionamenti Safety sono collegati tramite PROFIBUS DP alla SIMOTION CPU, e la F-CPU SIMATIC come I-Slave PROFIBUS per la comunicazione F.
Figura 8-43 Topologia del traffico trasversale F per apparecchi di azionamento PROFIBUS
8.6.4.3 PROFIsafe tramite PROFIBUS con traffico trasversale F sull'esempio SIMOTION D Qui di seguito viene configurata una comunicazione PROFIsafe tra un SINAMICS S120, un SIMOTION D come master DP e una F-CPU SIMATIC come I-Slave tramite PROFIBUS.
Struttura della topologia (struttura della progettazione) La topologia fondamentale dei componenti coinvolti nella comunicazione PROFIsafe tramite PROFIBUS (F-CPU SIMATIC e D4x5 integrato con SINAMICS S120 o CX32) si trova nel precedente capitolo.
L'apparecchio di azionamento (SINAMICS) e F-CPU SIMATIC si trovano nella stessa sottorete PROFIBUS.
Progettazione della comunicazione PROFIsafe tramite traffico trasversale F 1. In Config HW creare, in base all'hardware presente, una F-CPU ad es. CPU 317F-2, un
controllore SIMOTION D4x5 e un SINAMICS 120 CU320.
2. Definire la CPU SIMOTION desiderata quale master DP e la F-CPU collegata quale relativo slave DP.
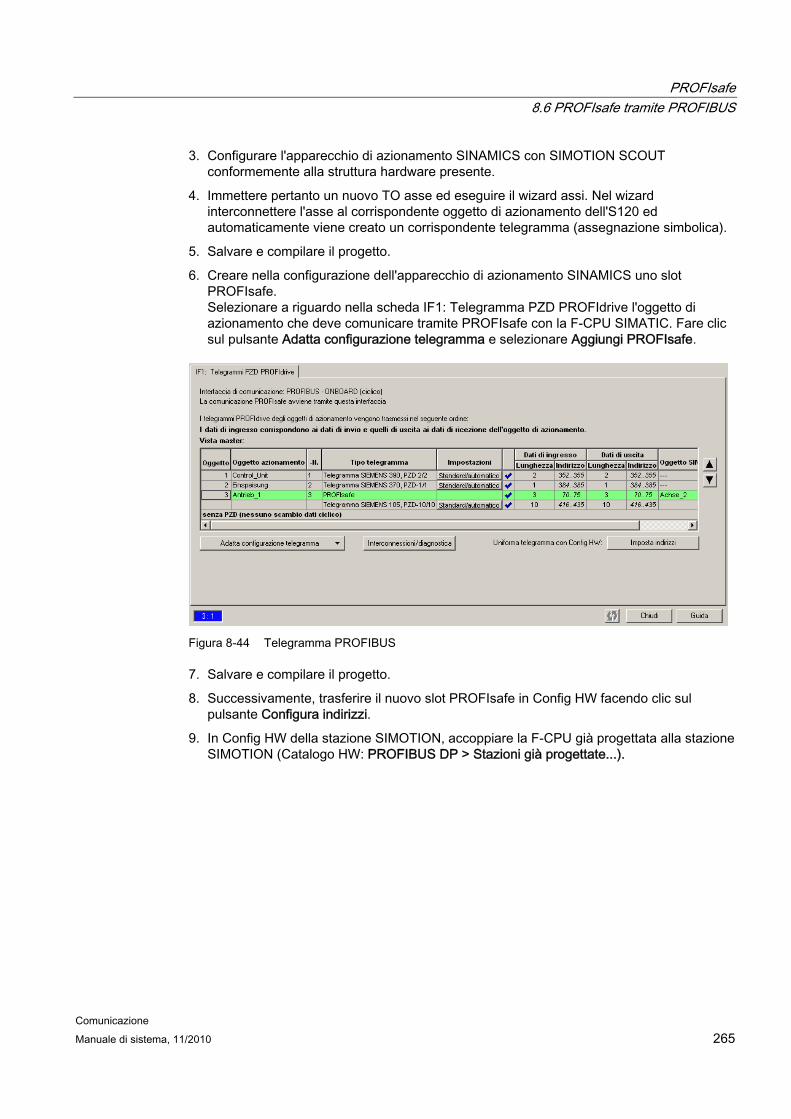
PROFIsafe 8.6 PROFIsafe tramite PROFIBUS
Comunicazione Manuale di sistema, 11/2010 265
3. Configurare l'apparecchio di azionamento SINAMICS con SIMOTION SCOUT conformemente alla struttura hardware presente.
4. Immettere pertanto un nuovo TO asse ed eseguire il wizard assi. Nel wizard interconnettere l'asse al corrispondente oggetto di azionamento dell'S120 ed automaticamente viene creato un corrispondente telegramma (assegnazione simbolica).
5. Salvare e compilare il progetto.
6. Creare nella configurazione dell'apparecchio di azionamento SINAMICS uno slot PROFIsafe. Selezionare a riguardo nella scheda IF1: Telegramma PZD PROFIdrive l'oggetto di azionamento che deve comunicare tramite PROFIsafe con la F-CPU SIMATIC. Fare clic sul pulsante Adatta configurazione telegramma e selezionare Aggiungi PROFIsafe.
Figura 8-44 Telegramma PROFIBUS
7. Salvare e compilare il progetto.
8. Successivamente, trasferire il nuovo slot PROFIsafe in Config HW facendo clic sul pulsante Configura indirizzi.
9. In Config HW della stazione SIMOTION, accoppiare la F-CPU già progettata alla stazione SIMOTION (Catalogo HW: PROFIBUS DP > Stazioni già progettate...).
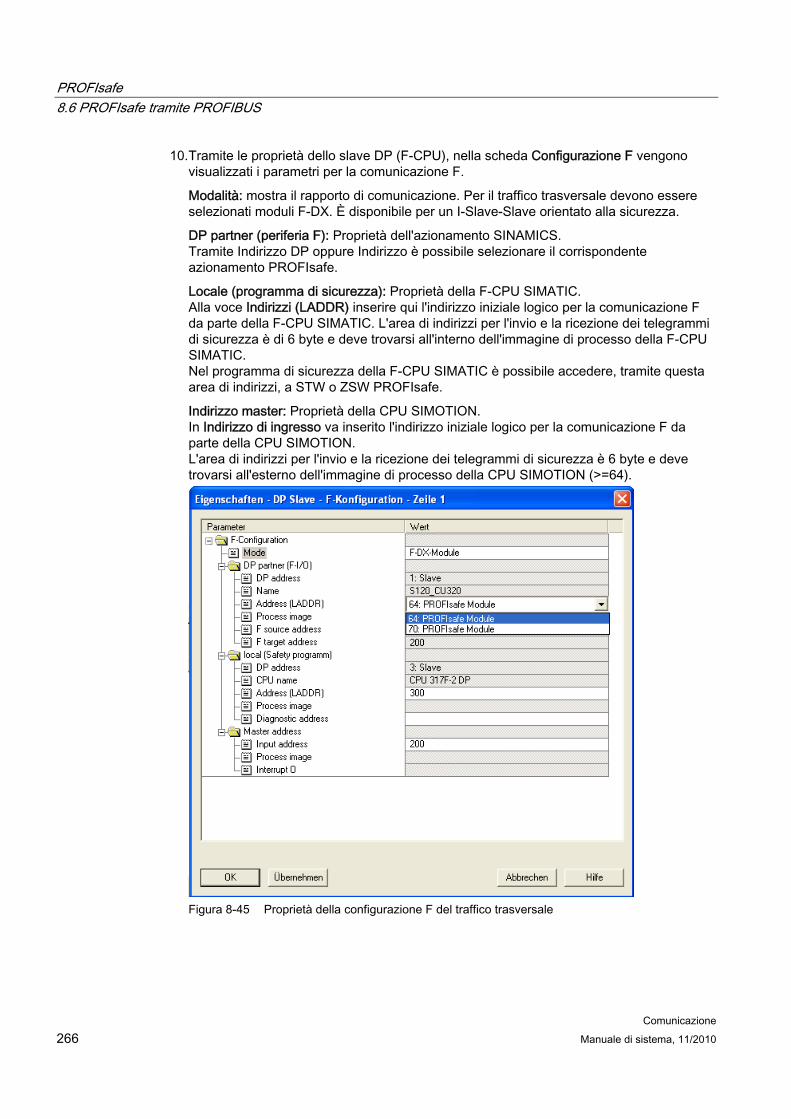
PROFIsafe 8.6 PROFIsafe tramite PROFIBUS
Comunicazione 266 Manuale di sistema, 11/2010
10. Tramite le proprietà dello slave DP (F-CPU), nella scheda Configurazione F vengono visualizzati i parametri per la comunicazione F.
Modalità: mostra il rapporto di comunicazione. Per il traffico trasversale devono essere selezionati moduli F-DX. È disponibile per un I-Slave-Slave orientato alla sicurezza.
DP partner (periferia F): Proprietà dell'azionamento SINAMICS. Tramite Indirizzo DP oppure Indirizzo è possibile selezionare il corrispondente azionamento PROFIsafe.
Locale (programma di sicurezza): Proprietà della F-CPU SIMATIC. Alla voce Indirizzi (LADDR) inserire qui l'indirizzo iniziale logico per la comunicazione F da parte della F-CPU SIMATIC. L'area di indirizzi per l'invio e la ricezione dei telegrammi di sicurezza è di 6 byte e deve trovarsi all'interno dell'immagine di processo della F-CPU SIMATIC. Nel programma di sicurezza della F-CPU SIMATIC è possibile accedere, tramite questa area di indirizzi, a STW o ZSW PROFIsafe.
Indirizzo master: Proprietà della CPU SIMOTION. In Indirizzo di ingresso va inserito l'indirizzo iniziale logico per la comunicazione F da parte della CPU SIMOTION. L'area di indirizzi per l'invio e la ricezione dei telegrammi di sicurezza è 6 byte e deve trovarsi all'esterno dell'immagine di processo della CPU SIMOTION (>=64).
Figura 8-45 Proprietà della configurazione F del traffico trasversale
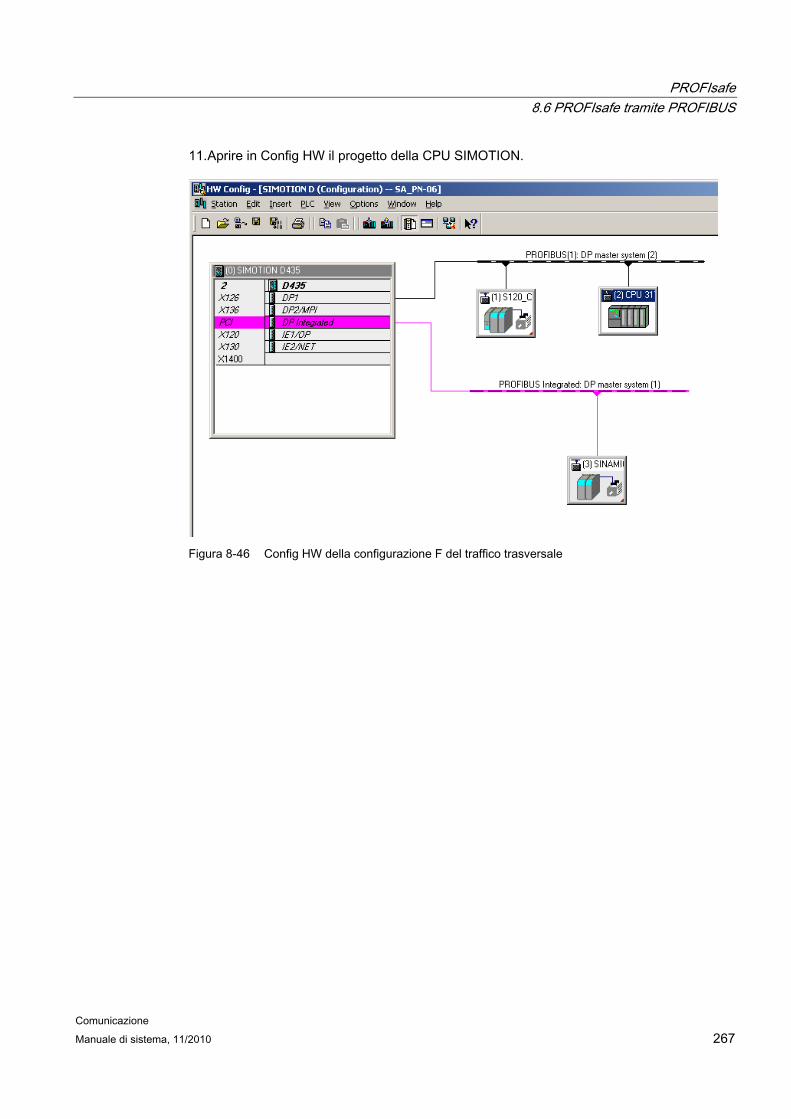
PROFIsafe 8.6 PROFIsafe tramite PROFIBUS
Comunicazione Manuale di sistema, 11/2010 267
11. Aprire in Config HW il progetto della CPU SIMOTION.
Figura 8-46 Config HW della configurazione F del traffico trasversale
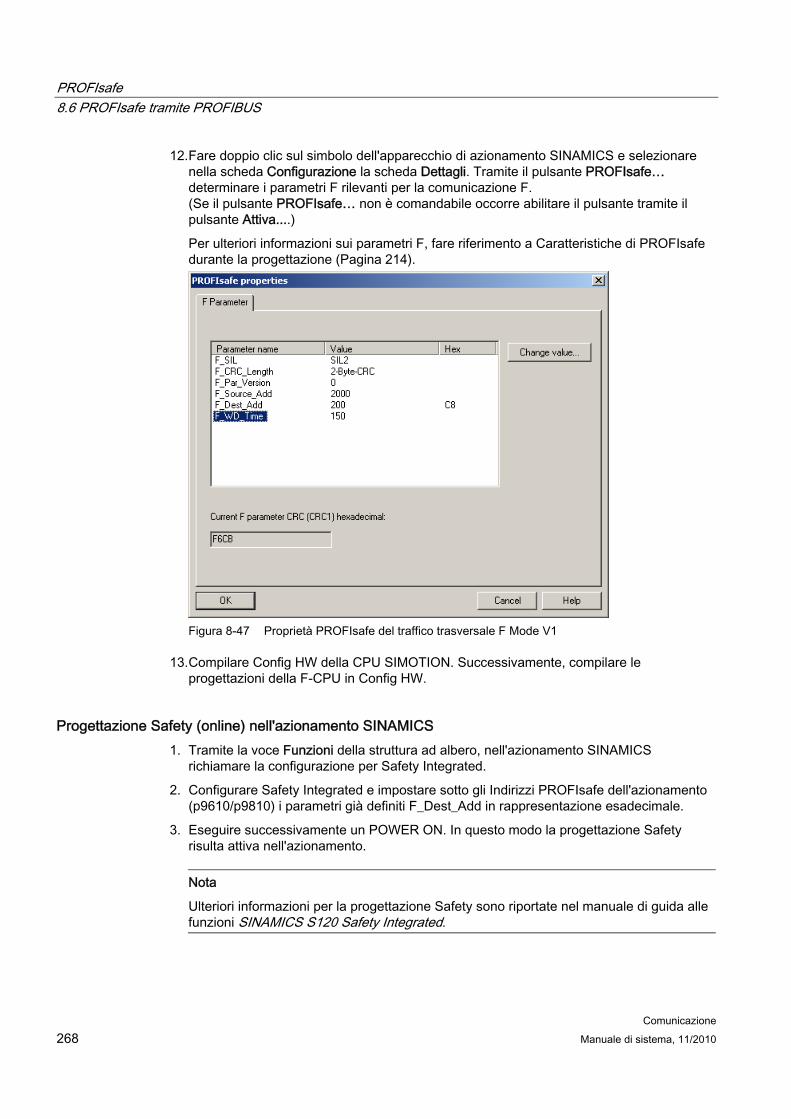
PROFIsafe 8.6 PROFIsafe tramite PROFIBUS
Comunicazione 268 Manuale di sistema, 11/2010
12. Fare doppio clic sul simbolo dell'apparecchio di azionamento SINAMICS e selezionare nella scheda Configurazione la scheda Dettagli. Tramite il pulsante PROFIsafe… determinare i parametri F rilevanti per la comunicazione F. (Se il pulsante PROFIsafe… non è comandabile occorre abilitare il pulsante tramite il pulsante Attiva....)
Per ulteriori informazioni sui parametri F, fare riferimento a Caratteristiche di PROFIsafe durante la progettazione (Pagina 214).
Figura 8-47 Proprietà PROFIsafe del traffico trasversale F Mode V1
13. Compilare Config HW della CPU SIMOTION. Successivamente, compilare le progettazioni della F-CPU in Config HW.
Progettazione Safety (online) nell'azionamento SINAMICS 1. Tramite la voce Funzioni della struttura ad albero, nell'azionamento SINAMICS
richiamare la configurazione per Safety Integrated.
2. Configurare Safety Integrated e impostare sotto gli Indirizzi PROFIsafe dell'azionamento (p9610/p9810) i parametri già definiti F_Dest_Add in rappresentazione esadecimale.
3. Eseguire successivamente un POWER ON. In questo modo la progettazione Safety risulta attiva nell'azionamento.
Nota
Ulteriori informazioni per la progettazione Safety sono riportate nel manuale di guida alle funzioni SINAMICS S120 Safety Integrated.
PROFIsafe 8.7 Progettazione PROFIsafe - Test e verbali di collaudo
Comunicazione Manuale di sistema, 11/2010 269
8.7 Progettazione PROFIsafe - Test e verbali di collaudo
Test e verbali di collaudo Una volta conclusa la progettazione e la messa in servizio, eseguire il test di collaudo per le funzioni di sicurezza dell'azionamento. In tale occasione viene verificata la corretta parametrizzazione delle funzioni di sicurezza. I test condotti vengono documentati all'interno di verbali.
Nota
Per il collaudo della comunicazione PROFIsafe, osservare le informazioni contenute nel Manuale di programmazione e d'uso SIMATIC, S7 Distributed Safety - Progettazione e programmazione ed il Manuale di guida alle funzioni SINAMICS S120 Safety Integrated dell'azionamento utilizzato.
8.8 Ulteriori informazioni su SIMOTION e PROFIsafe
Descrizione Per ulteriori informazioni sul tema PROFIsafe, fare riferimento alla seguente documentazione:
● La modalità di interconnessione con Safety Integrated di un asse con azionamento SINAMICS è descritta nel Manuale di guida alle funzioni TO Asse / Encoder esterno.
● La modalità di progettazione di un azionamento SINAMICS S120 o SINAMICS S110 con Safety Integrated è descritta nei manuali
– Manuale di guida alle funzioni SINAMICS S120
– Manuale di guida alle funzioni SINAMICS S120 Safety Integrated
– Manuale di guida alle funzioni SINAMICS S110.

PROFIsafe 8.8 Ulteriori informazioni su SIMOTION e PROFIsafe
Comunicazione 270 Manuale di sistema, 11/2010
Comunicazione Manuale di sistema, 11/2010 271
PROFIdrive 99.1 L'importanza dei profili
I profili nella tecnica di automazione definiscono determinate caratteristiche e determinati comportamenti per gli apparecchi, le famiglie di apparecchi o per interi sistemi in modo ottenere un'ampia caratterizzazione univoca degli apparecchi stessi. Solo gli apparecchi dotati dello stesso profilo, indipendentemente dal costruttore, possono comportarsi in modo "interpolabile" su un bus di campo e quindi rendere evidenti per l'utente i vantaggi di un bus di campo.
I profili sono delle definizioni (specifiche) stabilite da costruttori e utenti riguardanti determinate caratteristiche, prestazioni e comportamenti degli apparecchi e dei sistemi. Essi hanno l'obiettivo di rendere interoperabili e in una certa misura sostituibili su un bus gli apparecchi e i sistemi appartenenti ad una certa famiglia di prodotti grazie ad uno sviluppo "conforme al profilo".
Si distingue tra i cosiddetti profili applicativi (generali o specifici) e profili di sistema:
● I profili applicativi si riferiscono principalmente agli apparecchi, in questo caso azionamenti, e contengono sia una selezione concordata di comunicazione di bus e di applicazioni specifiche degli apparecchi.
● I profili di sistema descrivono delle classi di sistemi includendo la funzionalità del master, le interfacce di programma e gli strumenti di integrazione.
PROFIdrive Il profilo PROFIdrive fa parte dei profili applicativi specifici. Esso descrive nel dettaglio l'uso coerente delle funzioni di comunicazione Traffico trasversale, Equidistanza e Sincronismo al clock nelle applicazioni di azionamento. Inoltre vengono specificate in modo chiaro tutte le caratteristiche dell'apparecchiatura che influiscono sull'interfaccia di un controller collegato tramite PROFIBUS o PROFINET. Tra queste, tra l'altro, lo state machine (controllo sequenziale), l'interfaccia encoder, la normalizzazione dei valori, la definizione dei telegrammi standard, l'accesso ai parametri di azionamento, la diagnostica dell'azionamento, ecc.
Il profilo PROFIdrive supporta sia i sistemi Motion Control centralizzati sia quelli decentrati.
La filosofia di base: – Keep it simple –
Il profilo PROFIdrive segue la filosofia di base secondo la quale l'interfaccia dell'azionamento deve essere il più semplice possibile e priva di funzioni tecnologiche. Grazie a questa filosofia, i modelli di ricerca del punto di riferimento e la funzionalità e la performance del master PROFIBUS/PROFIDRIVE non influiscono se non in misura minima sull'interfaccia dell'azionamento.
PROFIdrive 9.2 Panoramica PROFIdrive
Comunicazione 272 Manuale di sistema, 11/2010
9.2 Panoramica PROFIdrive
Il profilo PROFIdrive Il profilo PROFIdrive definisce il comportamento dell'apparecchiatura e il procedimento di accesso ai dati di azionamento per gli azionamenti elettrici su PROFIBUS e PROFINET, dal semplice convertitore di frequenza ai potenti servoregolatori.
PROFIdrive è suddiviso in una parte generale e in una specifica del bus. Nella parte generale sono definite le proprietà seguenti:
● Modello base (Base Model)
● Modello parametri (Parameter Model)
● Modello applicazione (Application Model)
Nella parte specifica del bus avvengono le assegnazioni seguenti:
● PROFIdrive su PROFIBUS
● PROFIdrive su PROFINET
Una descrizione precisa del profilo PROFIdrive è disponibile nella nota seguente.
Indicazione bibliografica Profilo PROFIdrive
PROFIBUS Profile PROFIdrive – Profile Drive Technology Version V4.1, May 2006, PROFIBUS User Organization e. V. Haid-und-Neu-Straße 7, D-76131 Karlsruhe http://www.profibus.com Order Number 3.172, spec. cap. 6
Norme
Norma IEC 61800
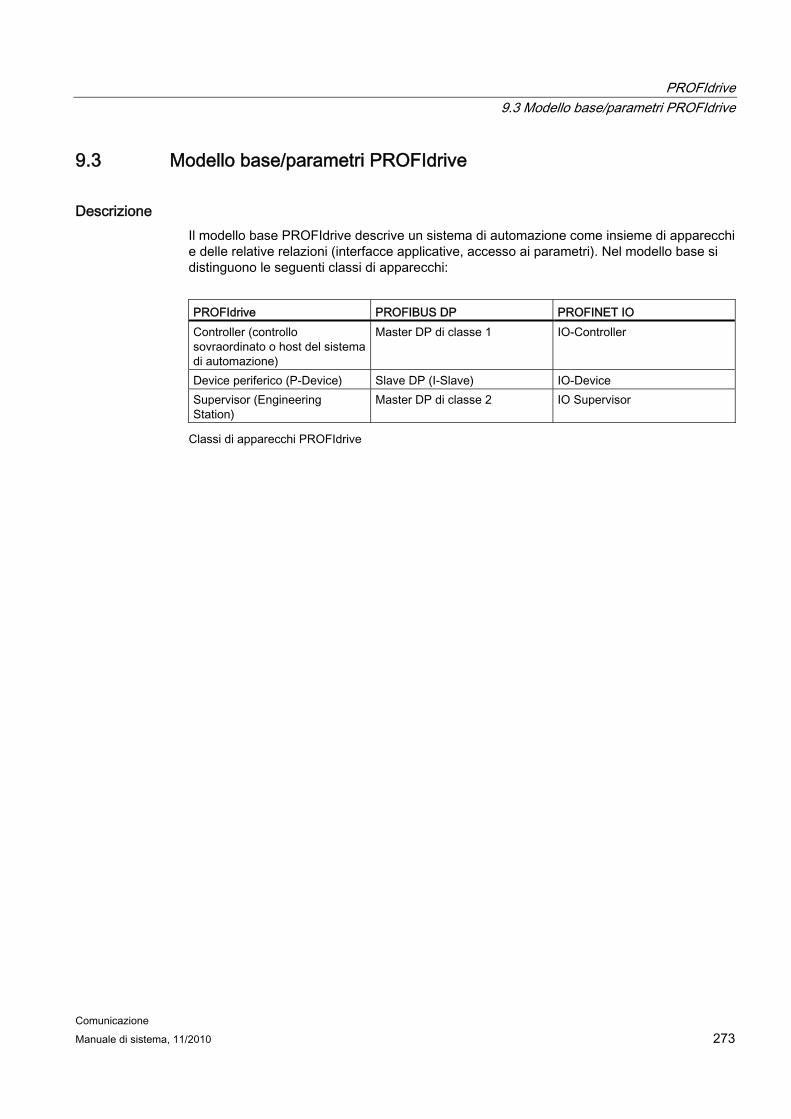
PROFIdrive 9.3 Modello base/parametri PROFIdrive
Comunicazione Manuale di sistema, 11/2010 273
9.3 Modello base/parametri PROFIdrive
Descrizione Il modello base PROFIdrive descrive un sistema di automazione come insieme di apparecchi e delle relative relazioni (interfacce applicative, accesso ai parametri). Nel modello base si distinguono le seguenti classi di apparecchi:
PROFIdrive PROFIBUS DP PROFINET IO Controller (controllo sovraordinato o host del sistema di automazione)
Master DP di classe 1 IO-Controller
Device periferico (P-Device) Slave DP (I-Slave) IO-Device Supervisor (Engineering Station)
Master DP di classe 2 IO Supervisor
Classi di apparecchi PROFIdrive
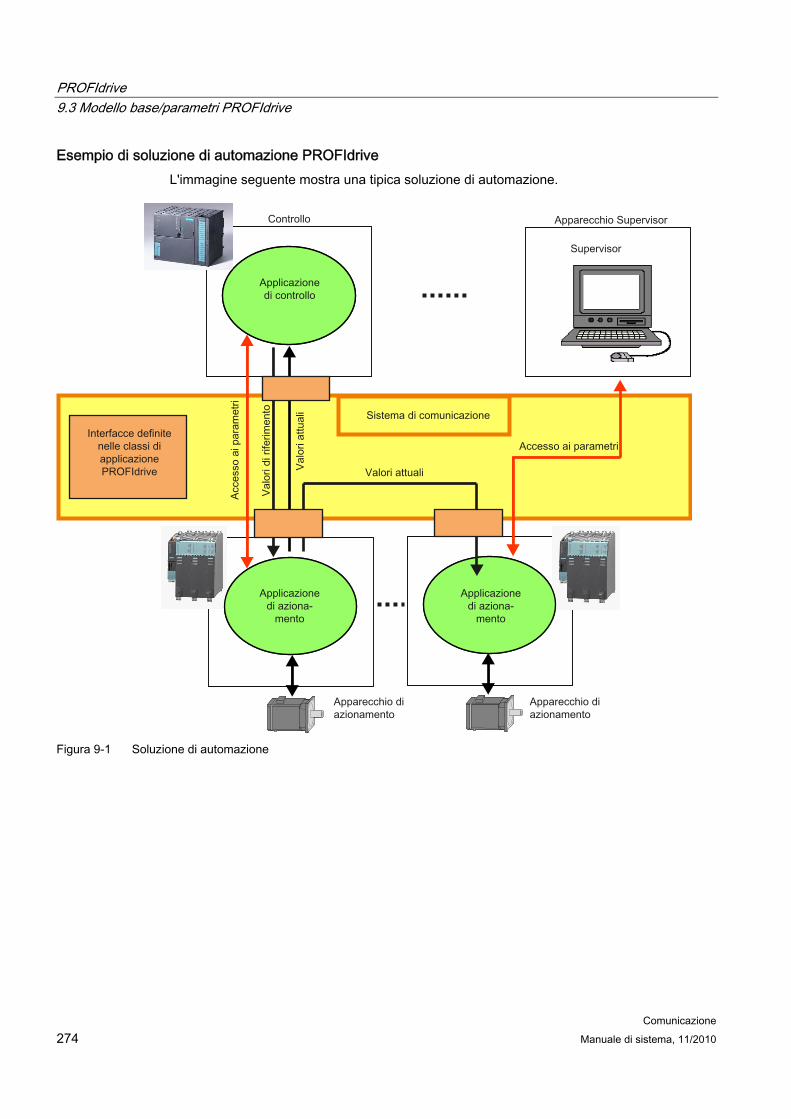
PROFIdrive 9.3 Modello base/parametri PROFIdrive
Comunicazione 274 Manuale di sistema, 11/2010
Esempio di soluzione di automazione PROFIdrive L'immagine seguente mostra una tipica soluzione di automazione.
Figura 9-1 Soluzione di automazione
PROFIdrive 9.3 Modello base/parametri PROFIdrive
Comunicazione Manuale di sistema, 11/2010 275
Servizi di comunicazione Nel profilo PROFIdrive sono definiti due servizi di comunicazione, lo scambio di dati ciclico e lo scambio di dati aciclico.
● Scambio di dati ciclico tramite il canale dati ciclico
Durante il funzionamento dei sistemi Motion Control per il controllo e la regolazione sono necessari dati aggiornamenti ciclicamente. Tramite il sistema di comunicazione tali dati devono essere inviati agli apparecchi di azionamento come valori di riferimento oppure trasferiti dall'apparecchio di azionamento come valori attuali. Di solito il trasferimento di questi dati prevede tempi critici.
● Scambio di dati aciclico tramite il canale dati aciclico
Oltre allo scambio di dati ciclici è disponibile anche un canale parametri aciclico per lo scambio di parametri tra il controllo / Supervisor e gli apparecchi di azionamento. L'accesso a questi dati non prevede tempi critici.
● Canale allarme
Gli allarmi vengono emessi in funzione degli eventi e mostrano la comparsa e l'eliminazione di stati di errore.
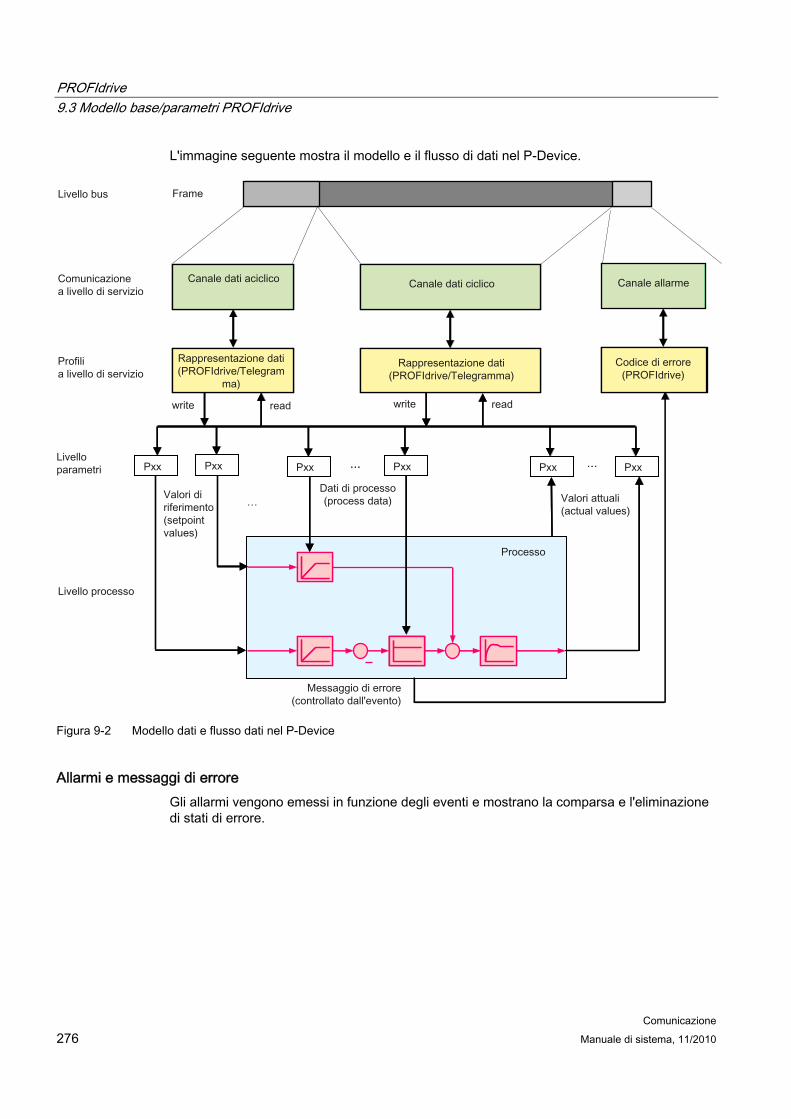
PROFIdrive 9.3 Modello base/parametri PROFIdrive
Comunicazione 276 Manuale di sistema, 11/2010
L'immagine seguente mostra il modello e il flusso di dati nel P-Device.
Figura 9-2 Modello dati e flusso dati nel P-Device
Allarmi e messaggi di errore Gli allarmi vengono emessi in funzione degli eventi e mostrano la comparsa e l'eliminazione di stati di errore.
PROFIdrive 9.4 Segmentazione nelle classi di applicazioni
Comunicazione Manuale di sistema, 11/2010 277
Modello parametri Il modello parametri nel profilo PROFIdrive distingue tra i parametri del profilo e i parametri specifici del produttore:
● I parametri del profilo sono definiti per oggetti che si ricavano dal modello apparecchi del profilo PROFIdrive. Si tratta, ad es., di funzioni generali come identificazione dell'azionamento, buffer dei guasti o controllo azionamento. Questi parametri sono uguali per tutti gli azionamenti.
● Tutti gli altri parametri sono specifici per il produttore. I parametri non vengono definiti tramite il profilo, bensì tramite l'interfaccia con il processo applicativo.
L'accesso agli elementi (valori, descrizioni dei parametri, elementi di testo) di un parametro avviene in linea di principio in modo aciclico (con l'eccezione di azionamenti G120, che possono scambiare dati con PKW in modo ciclico). A tale scopo viene definita una struttura dati Request/Response indipendente.
9.4 Segmentazione nelle classi di applicazioni
Integrazione degli azionamenti nelle soluzioni di automazione L'integrazione degli azionamenti nelle soluzioni di automazione dipende in gran parte dal compito di azionamento. Per coprire la vastissima gamma di applicazioni di azionamento, dal convertitore di frequenza più semplice ai sistemi multiasse sincronizzati altamente dinamici con un unico profilo, PROFIdrive definisce sei classi applicative in cui può essere classificata la maggior parte delle applicazioni di azionamento.
Tabella 9- 1 Tabella 3-1 Classi di applicazioni/Classi applicative
Classe Azionamento Classe 1 azionamenti standard (ad es. pompe, ventilatori, mescolatori ecc.), realizzati in
SIMOTION e SINAMICS Classe 2 azionamenti standard con funzioni tecnologiche Classe 3 azionamenti di regolazione, realizzati in SIMOTION e SINAMICS Classe 4 azionamenti Motion Control con logica Motion Control centrale sovraordinata e
sistema di regolazione della posizione "Dynamic Servo Control", realizzati in SIMOTION e SINAMICS
Classe 5 azionamenti Motion Control con logica Motion Control centrale sovraordinata e interfaccia del valore di riferimento della posizione
Classe 6 azionamenti Motion Control con logica Motion Control decentrata integrata negli azionamenti stessi
PROFIdrive definisce un modello di apparecchio composto da moduli funzionali che collaborano all'interno dell'apparecchio stesso e rispecchiano l'intelligenza del sistema di azionamento.
Questi moduli sono assegnati a oggetti che vengono descritti e definiti nelle loro funzioni all'interno del profilo. L'intera funzionalità di un azionamento viene quindi descritta mediante la somma dei suoi parametri.
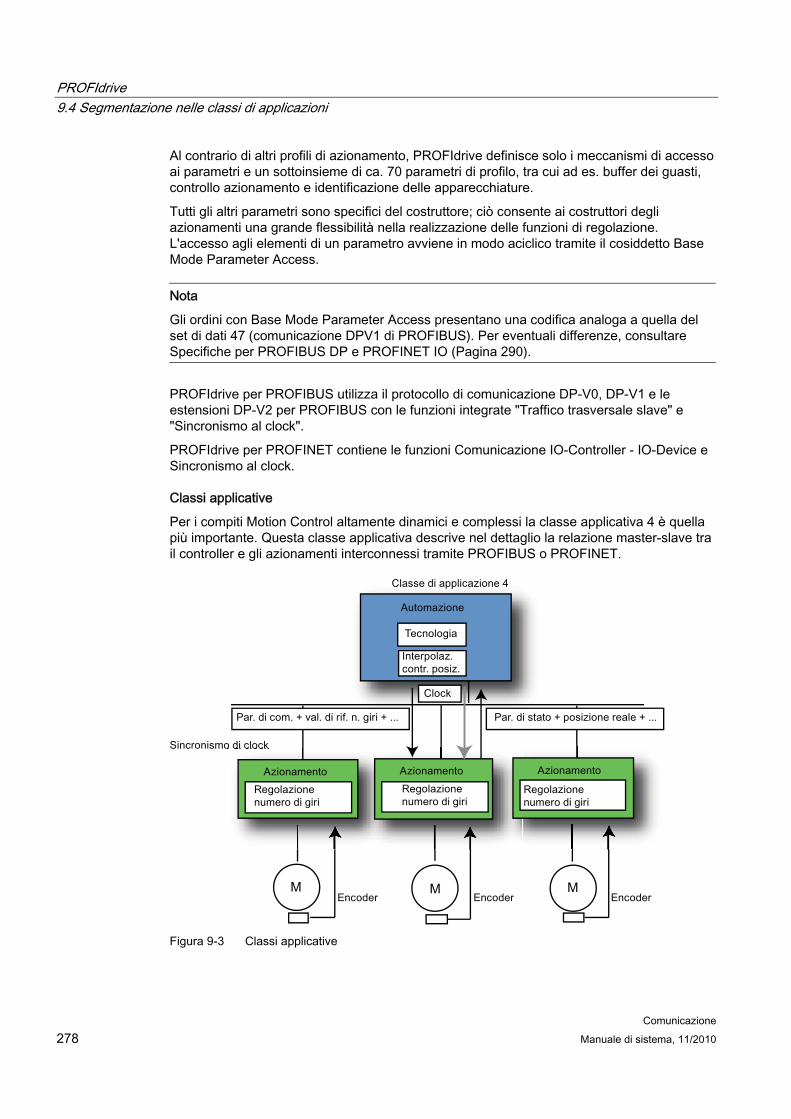
PROFIdrive 9.4 Segmentazione nelle classi di applicazioni
Comunicazione 278 Manuale di sistema, 11/2010
Al contrario di altri profili di azionamento, PROFIdrive definisce solo i meccanismi di accesso ai parametri e un sottoinsieme di ca. 70 parametri di profilo, tra cui ad es. buffer dei guasti, controllo azionamento e identificazione delle apparecchiature.
Tutti gli altri parametri sono specifici del costruttore; ciò consente ai costruttori degli azionamenti una grande flessibilità nella realizzazione delle funzioni di regolazione. L'accesso agli elementi di un parametro avviene in modo aciclico tramite il cosiddetto Base Mode Parameter Access.
Nota
Gli ordini con Base Mode Parameter Access presentano una codifica analoga a quella del set di dati 47 (comunicazione DPV1 di PROFIBUS). Per eventuali differenze, consultare Specifiche per PROFIBUS DP e PROFINET IO (Pagina 290).
PROFIdrive per PROFIBUS utilizza il protocollo di comunicazione DP-V0, DP-V1 e le estensioni DP-V2 per PROFIBUS con le funzioni integrate "Traffico trasversale slave" e "Sincronismo al clock".
PROFIdrive per PROFINET contiene le funzioni Comunicazione IO-Controller - IO-Device e Sincronismo al clock.
Classi applicative
Per i compiti Motion Control altamente dinamici e complessi la classe applicativa 4 è quella più importante. Questa classe applicativa descrive nel dettaglio la relazione master-slave tra il controller e gli azionamenti interconnessi tramite PROFIBUS o PROFINET.
Figura 9-3 Classi applicative
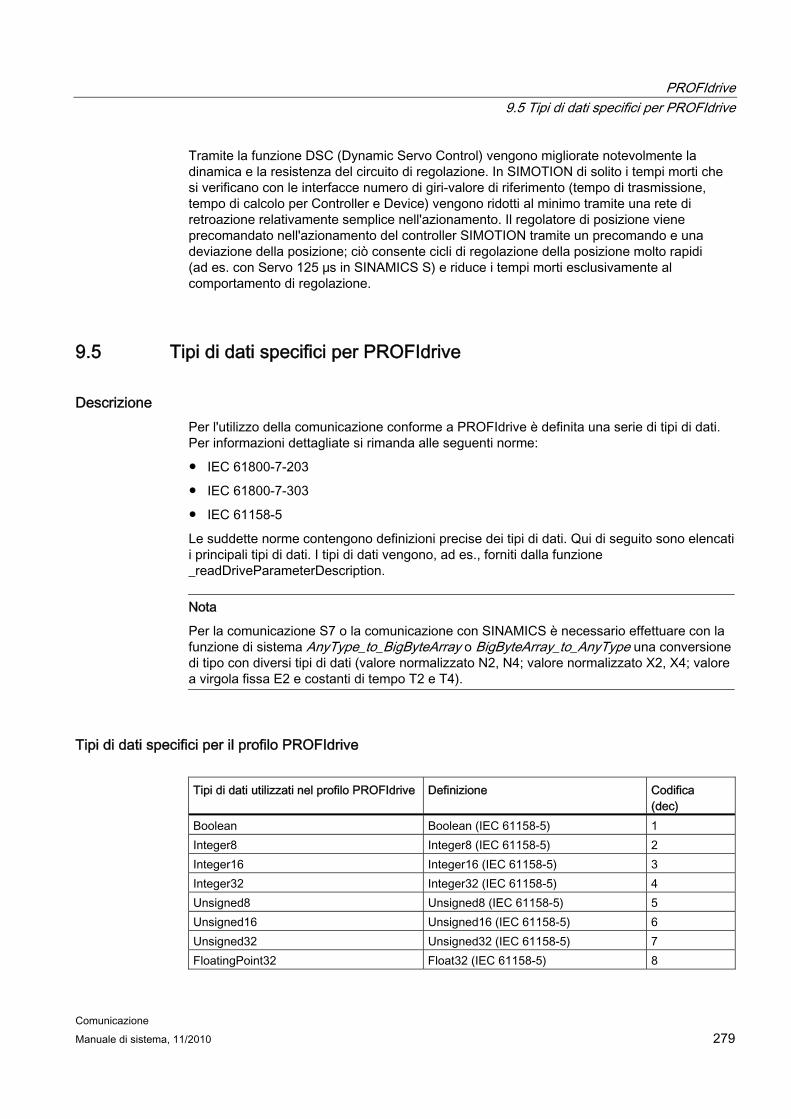
PROFIdrive 9.5 Tipi di dati specifici per PROFIdrive
Comunicazione Manuale di sistema, 11/2010 279
Tramite la funzione DSC (Dynamic Servo Control) vengono migliorate notevolmente la dinamica e la resistenza del circuito di regolazione. In SIMOTION di solito i tempi morti che si verificano con le interfacce numero di giri-valore di riferimento (tempo di trasmissione, tempo di calcolo per Controller e Device) vengono ridotti al minimo tramite una rete di retroazione relativamente semplice nell'azionamento. Il regolatore di posizione viene precomandato nell'azionamento del controller SIMOTION tramite un precomando e una deviazione della posizione; ciò consente cicli di regolazione della posizione molto rapidi (ad es. con Servo 125 μs in SINAMICS S) e riduce i tempi morti esclusivamente al comportamento di regolazione.
9.5 Tipi di dati specifici per PROFIdrive
Descrizione Per l'utilizzo della comunicazione conforme a PROFIdrive è definita una serie di tipi di dati. Per informazioni dettagliate si rimanda alle seguenti norme:
● IEC 61800-7-203
● IEC 61800-7-303
● IEC 61158-5
Le suddette norme contengono definizioni precise dei tipi di dati. Qui di seguito sono elencati i principali tipi di dati. I tipi di dati vengono, ad es., forniti dalla funzione _readDriveParameterDescription.
Nota
Per la comunicazione S7 o la comunicazione con SINAMICS è necessario effettuare con la funzione di sistema AnyType_to_BigByteArray o BigByteArray_to_AnyType una conversione di tipo con diversi tipi di dati (valore normalizzato N2, N4; valore normalizzato X2, X4; valore a virgola fissa E2 e costanti di tempo T2 e T4).
Tipi di dati specifici per il profilo PROFIdrive Tipi di dati utilizzati nel profilo PROFIdrive Definizione Codifica
(dec) Boolean Boolean (IEC 61158-5) 1 Integer8 Integer8 (IEC 61158-5) 2 Integer16 Integer16 (IEC 61158-5) 3 Integer32 Integer32 (IEC 61158-5) 4 Unsigned8 Unsigned8 (IEC 61158-5) 5 Unsigned16 Unsigned16 (IEC 61158-5) 6 Unsigned32 Unsigned32 (IEC 61158-5) 7 FloatingPoint32 Float32 (IEC 61158-5) 8
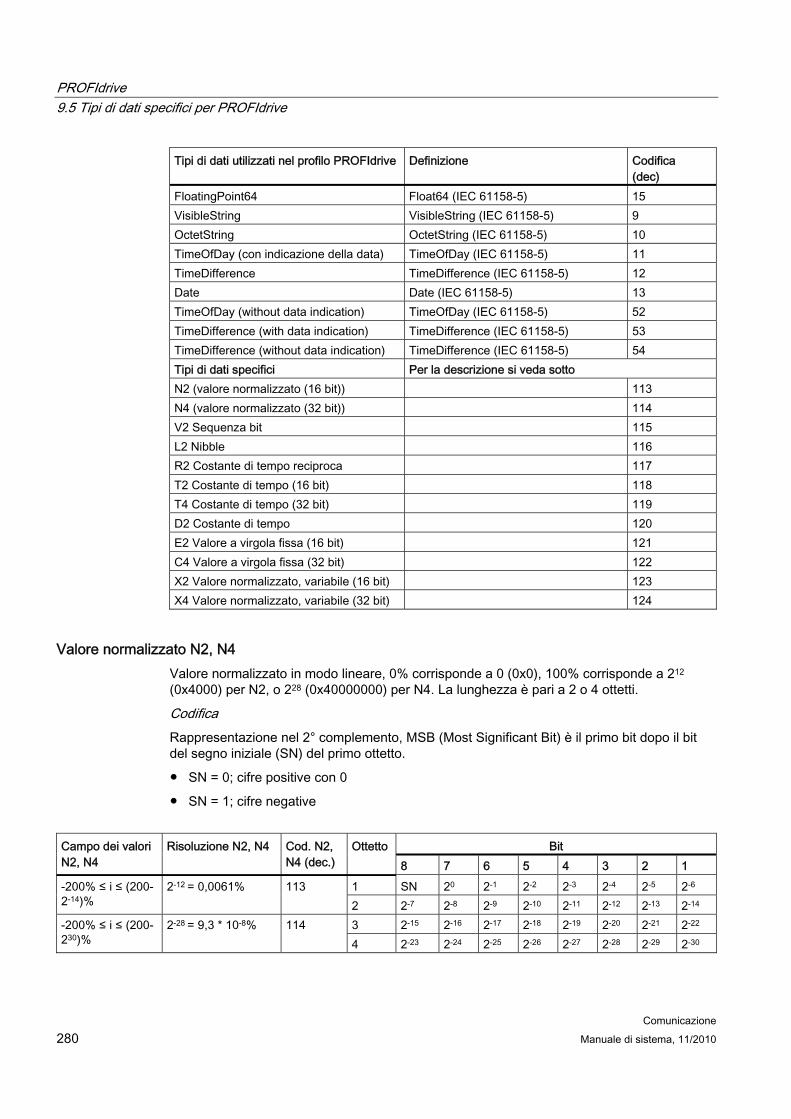
PROFIdrive 9.5 Tipi di dati specifici per PROFIdrive
Comunicazione 280 Manuale di sistema, 11/2010
Tipi di dati utilizzati nel profilo PROFIdrive Definizione Codifica (dec)
FloatingPoint64 Float64 (IEC 61158-5) 15 VisibleString VisibleString (IEC 61158-5) 9 OctetString OctetString (IEC 61158-5) 10 TimeOfDay (con indicazione della data) TimeOfDay (IEC 61158-5) 11 TimeDifference TimeDifference (IEC 61158-5) 12 Date Date (IEC 61158-5) 13 TimeOfDay (without data indication) TimeOfDay (IEC 61158-5) 52 TimeDifference (with data indication) TimeDifference (IEC 61158-5) 53 TimeDifference (without data indication) TimeDifference (IEC 61158-5) 54 Tipi di dati specifici Per la descrizione si veda sotto N2 (valore normalizzato (16 bit)) 113 N4 (valore normalizzato (32 bit)) 114 V2 Sequenza bit 115 L2 Nibble 116 R2 Costante di tempo reciproca 117 T2 Costante di tempo (16 bit) 118 T4 Costante di tempo (32 bit) 119 D2 Costante di tempo 120 E2 Valore a virgola fissa (16 bit) 121 C4 Valore a virgola fissa (32 bit) 122 X2 Valore normalizzato, variabile (16 bit) 123 X4 Valore normalizzato, variabile (32 bit) 124
Valore normalizzato N2, N4 Valore normalizzato in modo lineare, 0% corrisponde a 0 (0x0), 100% corrisponde a 212 (0x4000) per N2, o 228 (0x40000000) per N4. La lunghezza è pari a 2 o 4 ottetti.
Codifica
Rappresentazione nel 2° complemento, MSB (Most Significant Bit) è il primo bit dopo il bit del segno iniziale (SN) del primo ottetto.
● SN = 0; cifre positive con 0
● SN = 1; cifre negative
Bit Campo dei valori
N2, N4 Risoluzione N2, N4 Cod. N2,
N4 (dec.) Ottetto
8 7 6 5 4 3 2 1 1 SN 20 2-1 2-2 2-3 2-4 2-5 2-6 -200% ≤ i ≤ (200-
2-14)% 2-12 = 0,0061% 113
2 2-7 2-8 2-9 2-10 2-11 2-12 2-13 2-14 3 2-15 2-16 2-17 2-18 2-19 2-20 2-21 2-22 -200% ≤ i ≤ (200-
230)% 2-28 = 9,3 * 10-8% 114
4 2-23 2-24 2-25 2-26 2-27 2-28 2-29 2-30
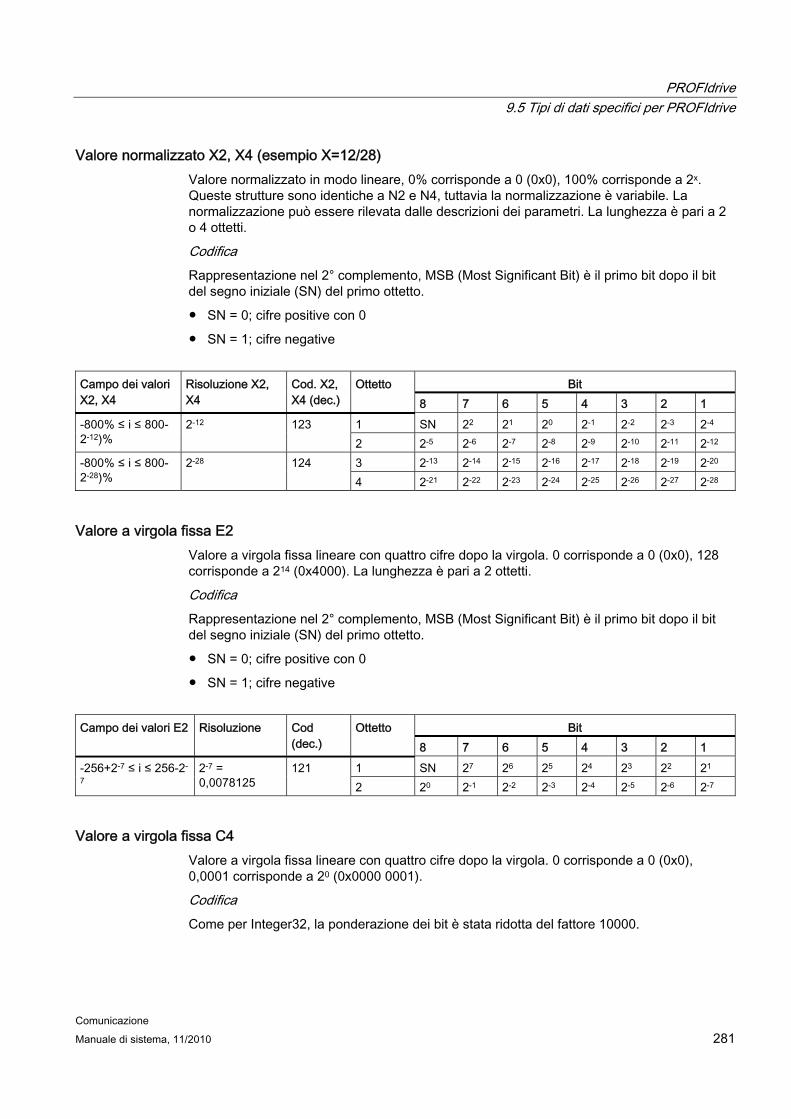
PROFIdrive 9.5 Tipi di dati specifici per PROFIdrive
Comunicazione Manuale di sistema, 11/2010 281
Valore normalizzato X2, X4 (esempio X=12/28) Valore normalizzato in modo lineare, 0% corrisponde a 0 (0x0), 100% corrisponde a 2x. Queste strutture sono identiche a N2 e N4, tuttavia la normalizzazione è variabile. La normalizzazione può essere rilevata dalle descrizioni dei parametri. La lunghezza è pari a 2 o 4 ottetti.
Codifica
Rappresentazione nel 2° complemento, MSB (Most Significant Bit) è il primo bit dopo il bit del segno iniziale (SN) del primo ottetto.
● SN = 0; cifre positive con 0
● SN = 1; cifre negative
Bit Campo dei valori
X2, X4 Risoluzione X2, X4
Cod. X2, X4 (dec.)
Ottetto 8 7 6 5 4 3 2 1
1 SN 22 21 20 2-1 2-2 2-3 2-4 -800% ≤ i ≤ 800-2-12)%
2-12 123 2 2-5 2-6 2-7 2-8 2-9 2-10 2-11 2-12 3 2-13 2-14 2-15 2-16 2-17 2-18 2-19 2-20 -800% ≤ i ≤ 800-
2-28)% 2-28 124
4 2-21 2-22 2-23 2-24 2-25 2-26 2-27 2-28
Valore a virgola fissa E2 Valore a virgola fissa lineare con quattro cifre dopo la virgola. 0 corrisponde a 0 (0x0), 128 corrisponde a 214 (0x4000). La lunghezza è pari a 2 ottetti.
Codifica
Rappresentazione nel 2° complemento, MSB (Most Significant Bit) è il primo bit dopo il bit del segno iniziale (SN) del primo ottetto.
● SN = 0; cifre positive con 0
● SN = 1; cifre negative
Bit Campo dei valori E2 Risoluzione Cod
(dec.) Ottetto
8 7 6 5 4 3 2 1 1 SN 27 26 25 24 23 22 21 -256+2-7 ≤ i ≤ 256-2-
7 2-7 = 0,0078125
121 2 20 2-1 2-2 2-3 2-4 2-5 2-6 2-7
Valore a virgola fissa C4 Valore a virgola fissa lineare con quattro cifre dopo la virgola. 0 corrisponde a 0 (0x0), 0,0001 corrisponde a 20 (0x0000 0001).
Codifica
Come per Integer32, la ponderazione dei bit è stata ridotta del fattore 10000.
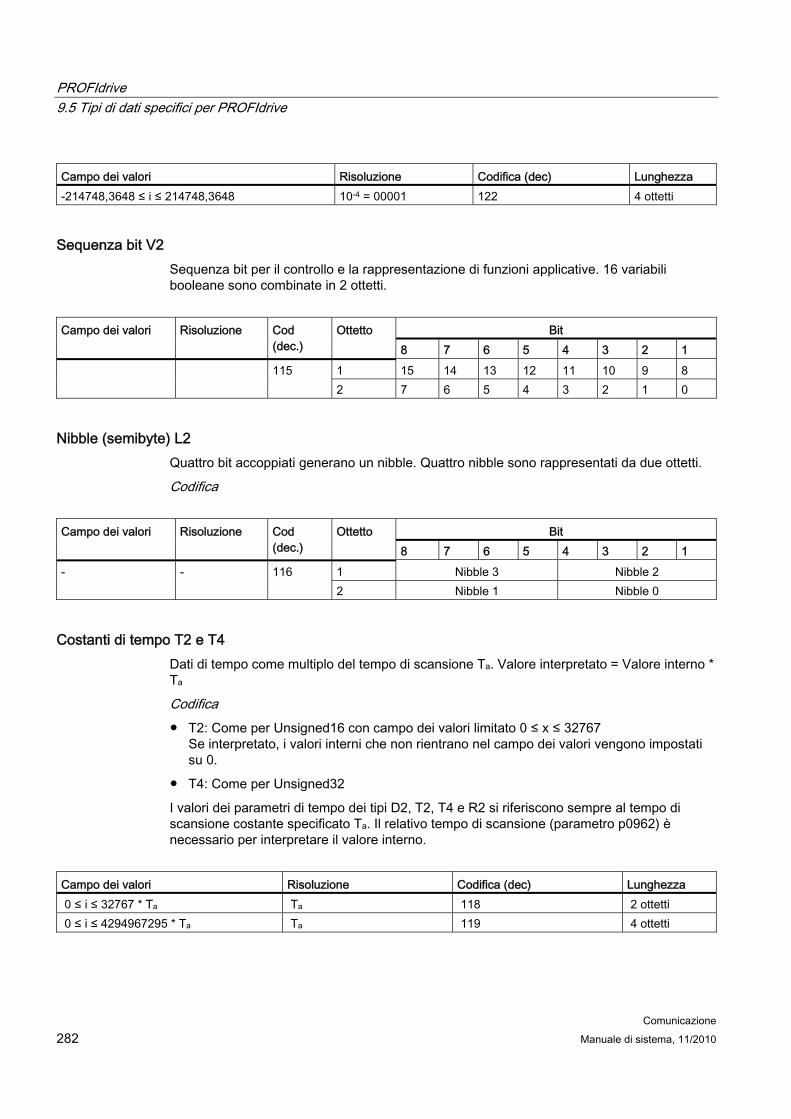
PROFIdrive 9.5 Tipi di dati specifici per PROFIdrive
Comunicazione 282 Manuale di sistema, 11/2010
Campo dei valori Risoluzione Codifica (dec) Lunghezza -214748,3648 ≤ i ≤ 214748,3648 10-4 = 00001 122 4 ottetti
Sequenza bit V2 Sequenza bit per il controllo e la rappresentazione di funzioni applicative. 16 variabili booleane sono combinate in 2 ottetti.
Bit Campo dei valori Risoluzione Cod
(dec.) Ottetto
8 7 6 5 4 3 2 1 1 15 14 13 12 11 10 9 8 115 2 7 6 5 4 3 2 1 0
Nibble (semibyte) L2 Quattro bit accoppiati generano un nibble. Quattro nibble sono rappresentati da due ottetti.
Codifica
Bit Campo dei valori Risoluzione Cod
(dec.) Ottetto
8 7 6 5 4 3 2 1 1 Nibble 3 Nibble 2 - - 116 2 Nibble 1 Nibble 0
Costanti di tempo T2 e T4 Dati di tempo come multiplo del tempo di scansione Ta. Valore interpretato = Valore interno * Ta
Codifica
● T2: Come per Unsigned16 con campo dei valori limitato 0 ≤ x ≤ 32767 Se interpretato, i valori interni che non rientrano nel campo dei valori vengono impostati su 0.
● T4: Come per Unsigned32
I valori dei parametri di tempo dei tipi D2, T2, T4 e R2 si riferiscono sempre al tempo di scansione costante specificato Ta. Il relativo tempo di scansione (parametro p0962) è necessario per interpretare il valore interno.
Campo dei valori Risoluzione Codifica (dec) Lunghezza 0 ≤ i ≤ 32767 * Ta Ta 118 2 ottetti 0 ≤ i ≤ 4294967295 * Ta Ta 119 4 ottetti
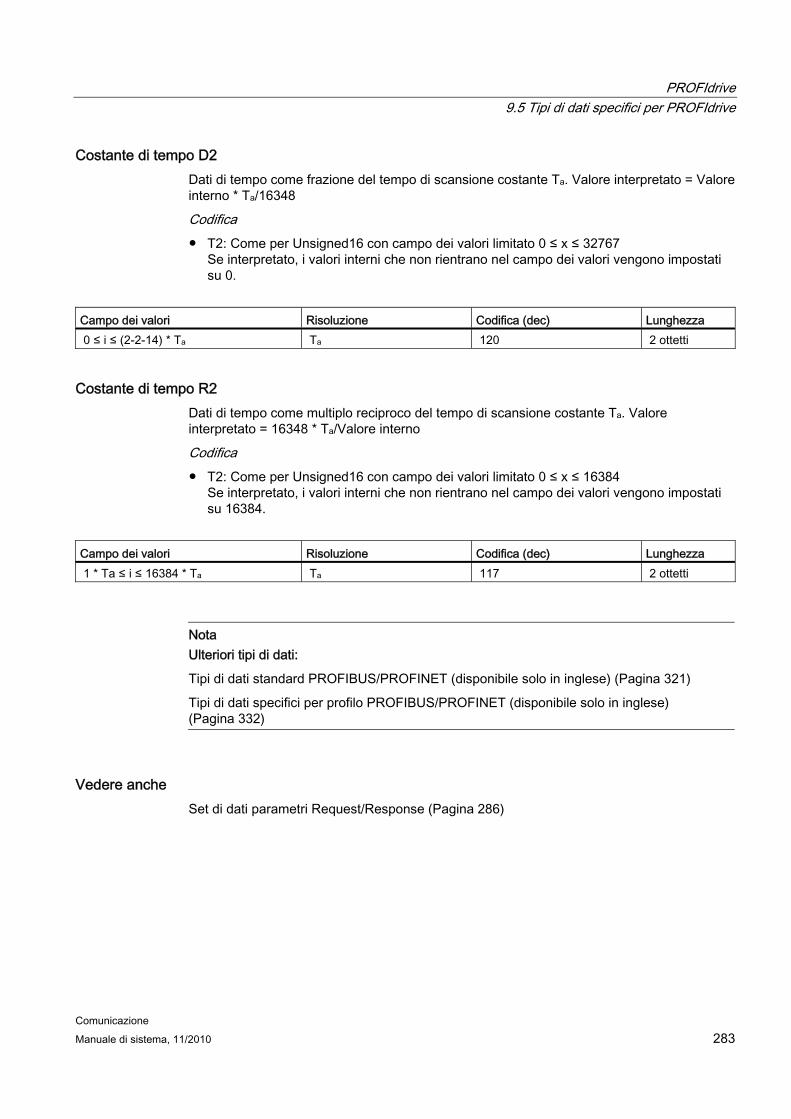
PROFIdrive 9.5 Tipi di dati specifici per PROFIdrive
Comunicazione Manuale di sistema, 11/2010 283
Costante di tempo D2 Dati di tempo come frazione del tempo di scansione costante Ta. Valore interpretato = Valore interno * Ta/16348
Codifica
● T2: Come per Unsigned16 con campo dei valori limitato 0 ≤ x ≤ 32767 Se interpretato, i valori interni che non rientrano nel campo dei valori vengono impostati su 0.
Campo dei valori Risoluzione Codifica (dec) Lunghezza 0 ≤ i ≤ (2-2-14) * Ta Ta 120 2 ottetti
Costante di tempo R2 Dati di tempo come multiplo reciproco del tempo di scansione costante Ta. Valore interpretato = 16348 * Ta/Valore interno
Codifica
● T2: Come per Unsigned16 con campo dei valori limitato 0 ≤ x ≤ 16384 Se interpretato, i valori interni che non rientrano nel campo dei valori vengono impostati su 16384.
Campo dei valori Risoluzione Codifica (dec) Lunghezza 1 * Ta ≤ i ≤ 16384 * Ta Ta 117 2 ottetti
Nota Ulteriori tipi di dati:
Tipi di dati standard PROFIBUS/PROFINET (disponibile solo in inglese) (Pagina 321)
Tipi di dati specifici per profilo PROFIBUS/PROFINET (disponibile solo in inglese) (Pagina 332)
Vedere anche Set di dati parametri Request/Response (Pagina 286)
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 284 Manuale di sistema, 11/2010
9.6 Comunicazione aciclica (Base Mode Parameter Access)
9.6.1 Comunicazione aciclica
Descrizione Gli apparecchi di azionamento PROFIdrive ricevono segnali di controllo e valori di riferimento e forniscono segnali di stato e valori reali.
Tali segnali vengono generalmente trasferiti in modo ciclico (cioè costante) tra controllo e azionamento.
Inoltre gli apparecchi di azionamento PROFIdrive rilevano parametri nei quali vengono mantenuti ulteriori dati necessari, come codici di errore, avvisi, parametri di regolazione, dati motore... Di solito questi dati vengono trasmessi non in modo ciclico (cioè costante), bensì "aciclico" soltanto in caso di necessità. Tramite accessi ai parametri è possibile trasmettere anche comandi all'azionamento.
In linea di principio la scrittura/lettura di parametri dagli azionamenti PROFIdrive avviene in modo aciclico tramite i cosiddetti "Base Mode Parameter Access". Il "Base Mode Parameter Access" può essere utilizzato sia con PROFIBUS che con PROFINET. Per le differenze tra PROFIBUS e PROFINET, consultare Specifiche per PROFIBUS DP e PROFINET IO (Pagina 290).
Questo servizio viene definito e approntato da PROFIdrive e si può utilizzare parallelamente alla comunicazione ciclica sul rispettivo bus. Il profilo PROFIdrive stabilisce l'esattezza di utilizzo di questo meccanismo di base per l'accesso di lettura/scrittura sul parametro di un azionamento conforme a PROFIdrive.
9.6.2 Lettura e scrittura di parametri con Base Mode Parameter Access
Descrizione La comunicazione per la scrittura/lettura di parametri per gli azionamenti PROFIdrive, ad es. SINAMICS S120, avviene sempre tramite il Base Mode Parameter Access, la cui struttura è definita nel profilo PROFIdrive. La struttura è descritta, ad es., anche nel Manuale di guida alle funzioni SINAMICS S120 alla voce Comunicazione aciclica.
Un accesso ai parametri è sempre costituito da una coppia:
● Write Request ("Scrittura set di dati")
● Read Request ("Lettura set di dati")
Questa sequenza deve essere rispettata, indipendentemente dal fatto che si tratti di un accesso in lettura o in scrittura.
Con una "Lettura set di dati" viene trasmesso l'ordine relativo ai parametri (ad es. leggere un parametro X). Con una "Lettura set di dati" viene recepita la risposta a tale ordine relativo ai parametri (valore del parametro X).
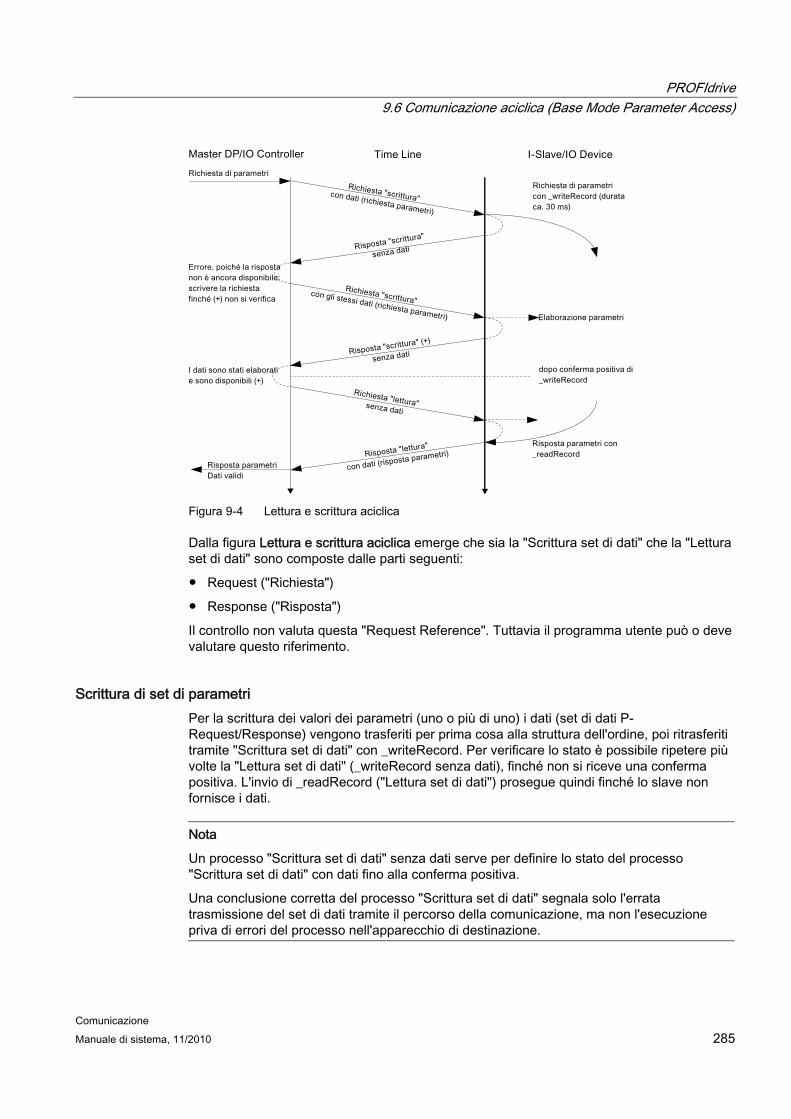
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 285
Figura 9-4 Lettura e scrittura aciclica
Dalla figura Lettura e scrittura aciclica emerge che sia la "Scrittura set di dati" che la "Lettura set di dati" sono composte dalle parti seguenti:
● Request ("Richiesta")
● Response ("Risposta")
Il controllo non valuta questa "Request Reference". Tuttavia il programma utente può o deve valutare questo riferimento.
Scrittura di set di parametri Per la scrittura dei valori dei parametri (uno o più di uno) i dati (set di dati P-Request/Response) vengono trasferiti per prima cosa alla struttura dell'ordine, poi ritrasferiti tramite "Scrittura set di dati" con _writeRecord. Per verificare lo stato è possibile ripetere più volte la "Lettura set di dati" (_writeRecord senza dati), finché non si riceve una conferma positiva. L'invio di _readRecord ("Lettura set di dati") prosegue quindi finché lo slave non fornisce i dati.
Nota
Un processo "Scrittura set di dati" senza dati serve per definire lo stato del processo "Scrittura set di dati" con dati fino alla conferma positiva.
Una conclusione corretta del processo "Scrittura set di dati" segnala solo l'errata trasmissione del set di dati tramite il percorso della comunicazione, ma non l'esecuzione priva di errori del processo nell'apparecchio di destinazione.
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 286 Manuale di sistema, 11/2010
Lettura dei set di parametri Per la lettura dei valori dei parametri per prima cosa viene composto il blocco di dati con i parametri che devono essere letti. Questo set di dati viene trasmesso all'azionamento tramite la combinazione "Scrittura set di dati" -"Lettura set di dati" (prima con _writeRecord e poi con _readRecord). Un successivo processo "Lettura set di dati" fornisce quindi una volta i valori richiesti (lo stesso riferimento d'ordine viene fornito anche nella risposta).
I processi sono rappresentati anche in forma grafica.
Nel profilo PROFIdrive viene stabilito in che modo trasferire i dati con dimensioni superiori a 1 Byte. Vale il cosiddetto formato "Big Endian", che trasferisce per prime le parti di maggiore valore:
WORD High Byte (Byte 1) Low Byte (Byte 2) DOUBLE WORD High Word High Byte (Byte 1) Low Byte (Byte 2) Low Word High Byte (Byte 3) Low Byte (Byte 4)
Rappresentazione di WORD e DWORD nel formato Big Endian
Poiché il controllo presenta ev. altre rappresentazioni dati interne, è necessario che per la composizione e la valutazione dei dati nel blocco di dati P-Request/Response (set di dati 47) venga effettuata esplicitamente una conversione.
In SIMOTION è eventualmente necessaria una conversione; vedere esempio di programma.
Vedere anche Regola 5 - Possibilità di max. 5 richiami contemporanei in SIMOTION (Pagina 304)
Set di dati parametri Request/Response (Pagina 286)
9.6.3 Set di dati parametri Request/Response
Struttura del set di dati P- Request/ Response È composto essenzialmente da:
● un'intestazione (identificativo ordine, asse destinazione/oggetto drive, numero di parametri nell'ordine)
● una Request Reference; riferimento d'ordine per identificare un ordine
● dati dell'ordine (attributo, numero di elementi/indici, numero e sottoindice parametro); per gli ordini di scrittura anche i valori.
● valori che vengono trasferiti alla funzione
Per una WRITE- o READ-Request i dati trasmessi hanno la struttura seguente.
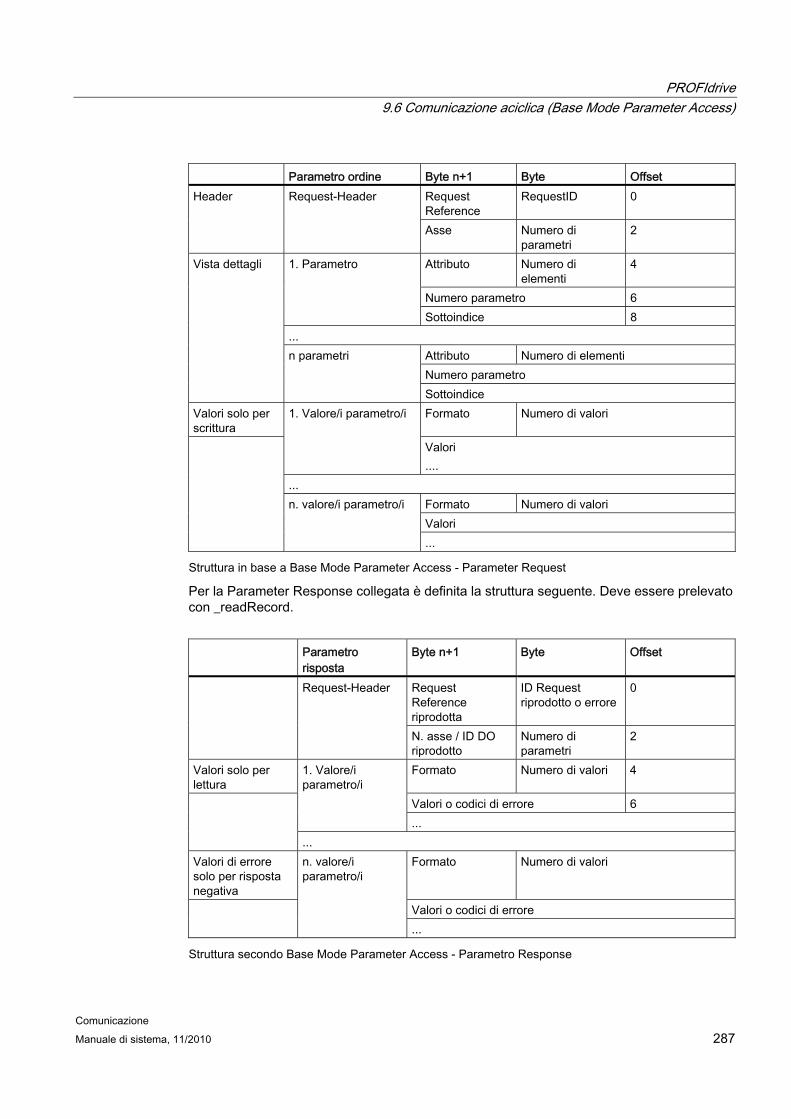
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 287
Parametro ordine Byte n+1 Byte Offset
Request Reference
RequestID 0 Header Request-Header
Asse Numero di parametri
2
Attributo Numero di elementi
4
Numero parametro 6
1. Parametro
Sottoindice 8 ...
Attributo Numero di elementi Numero parametro
Vista dettagli
n parametri
Sottoindice Valori solo per scrittura
Formato Numero di valori 1. Valore/i parametro/i
Valori ....
... Formato Numero di valori Valori
n. valore/i parametro/i
...
Struttura in base a Base Mode Parameter Access - Parameter Request
Per la Parameter Response collegata è definita la struttura seguente. Deve essere prelevato con _readRecord.
Parametro
risposta Byte n+1 Byte Offset
Request Reference riprodotta
ID Request riprodotto o errore
0 Request-Header
N. asse / ID DO riprodotto
Numero di parametri
2
Valori solo per lettura
Formato Numero di valori 4
Valori o codici di errore 6
1. Valore/i parametro/i
...
... Valori di errore solo per risposta negativa
Formato Numero di valori
Valori o codici di errore
n. valore/i parametro/i
...
Struttura secondo Base Mode Parameter Access - Parametro Response
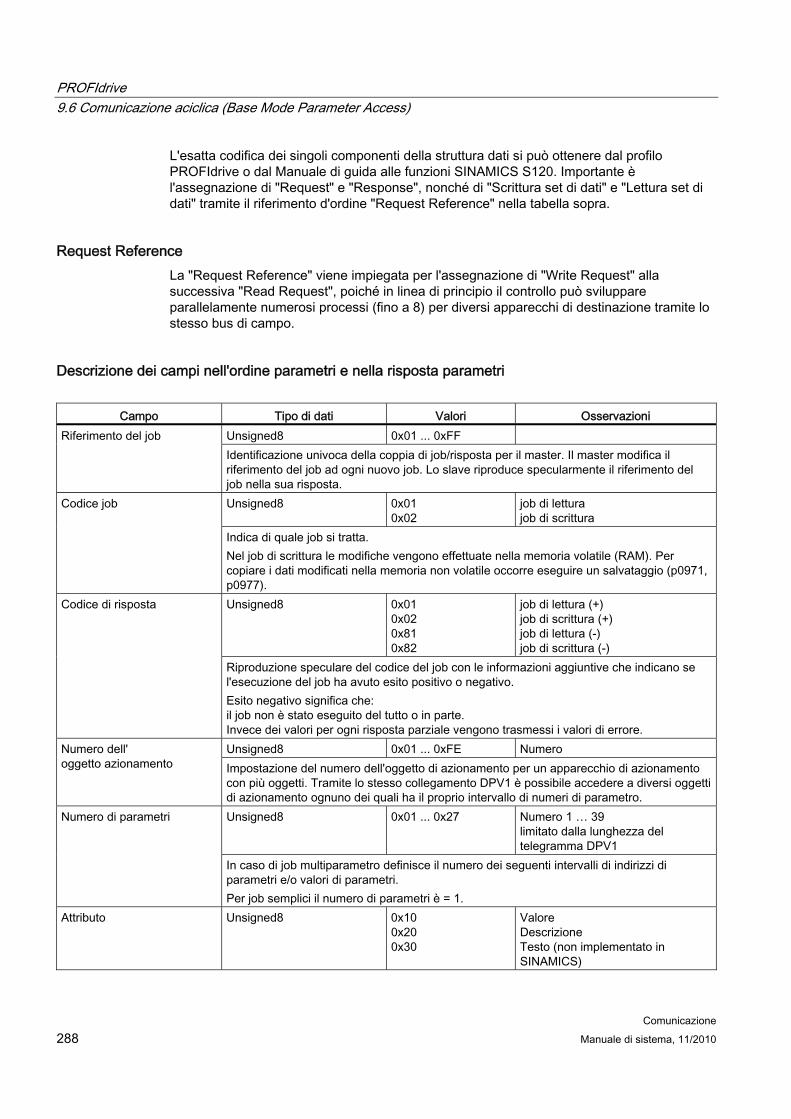
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 288 Manuale di sistema, 11/2010
L'esatta codifica dei singoli componenti della struttura dati si può ottenere dal profilo PROFIdrive o dal Manuale di guida alle funzioni SINAMICS S120. Importante è l'assegnazione di "Request" e "Response", nonché di "Scrittura set di dati" e "Lettura set di dati" tramite il riferimento d'ordine "Request Reference" nella tabella sopra.
Request Reference La "Request Reference" viene impiegata per l'assegnazione di "Write Request" alla successiva "Read Request", poiché in linea di principio il controllo può sviluppare parallelamente numerosi processi (fino a 8) per diversi apparecchi di destinazione tramite lo stesso bus di campo.
Descrizione dei campi nell'ordine parametri e nella risposta parametri
Campo Tipo di dati Valori Osservazioni Unsigned8 0x01 ... 0xFF Riferimento del job Identificazione univoca della coppia di job/risposta per il master. Il master modifica il riferimento del job ad ogni nuovo job. Lo slave riproduce specularmente il riferimento del job nella sua risposta. Unsigned8 0x01
0x02 job di lettura job di scrittura
Codice job
Indica di quale job si tratta. Nel job di scrittura le modifiche vengono effettuate nella memoria volatile (RAM). Per copiare i dati modificati nella memoria non volatile occorre eseguire un salvataggio (p0971, p0977). Unsigned8 0x01
0x02 0x81 0x82
job di lettura (+) job di scrittura (+) job di lettura (-) job di scrittura (-)
Codice di risposta
Riproduzione speculare del codice del job con le informazioni aggiuntive che indicano se l'esecuzione del job ha avuto esito positivo o negativo. Esito negativo significa che: il job non è stato eseguito del tutto o in parte. Invece dei valori per ogni risposta parziale vengono trasmessi i valori di errore. Unsigned8 0x01 ... 0xFE Numero Numero dell'
oggetto azionamento Impostazione del numero dell'oggetto di azionamento per un apparecchio di azionamento con più oggetti. Tramite lo stesso collegamento DPV1 è possibile accedere a diversi oggetti di azionamento ognuno dei quali ha il proprio intervallo di numeri di parametro. Unsigned8 0x01 ... 0x27 Numero 1 … 39
limitato dalla lunghezza del telegramma DPV1
Numero di parametri
In caso di job multiparametro definisce il numero dei seguenti intervalli di indirizzi di parametri e/o valori di parametri. Per job semplici il numero di parametri è = 1.
Attributo Unsigned8 0x10 0x20 0x30
Valore Descrizione Testo (non implementato in SINAMICS)
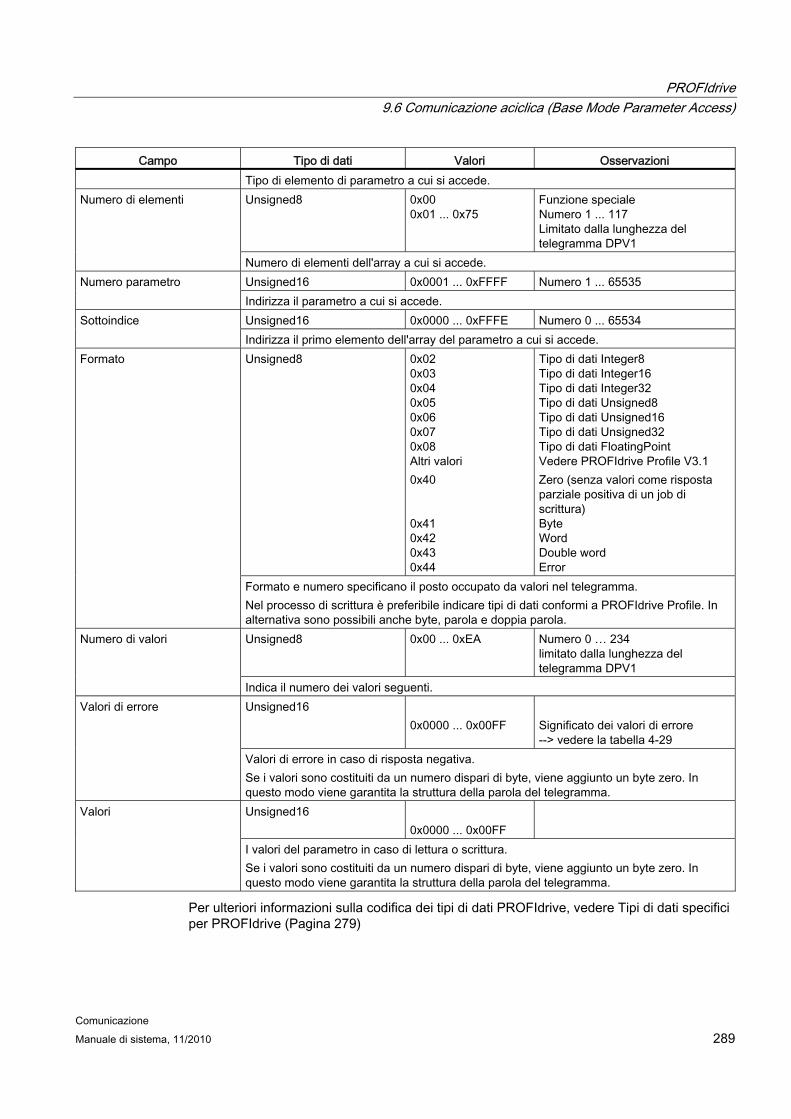
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 289
Campo Tipo di dati Valori Osservazioni Tipo di elemento di parametro a cui si accede. Unsigned8 0x00
0x01 ... 0x75 Funzione speciale Numero 1 ... 117 Limitato dalla lunghezza del telegramma DPV1
Numero di elementi
Numero di elementi dell'array a cui si accede. Unsigned16 0x0001 ... 0xFFFF Numero 1 ... 65535 Numero parametro Indirizza il parametro a cui si accede. Unsigned16 0x0000 ... 0xFFFE Numero 0 ... 65534 Sottoindice Indirizza il primo elemento dell'array del parametro a cui si accede. Unsigned8 0x02
0x03 0x04 0x05 0x06 0x07 0x08 Altri valori 0x40 0x41 0x42 0x43 0x44
Tipo di dati Integer8 Tipo di dati Integer16 Tipo di dati Integer32 Tipo di dati Unsigned8 Tipo di dati Unsigned16 Tipo di dati Unsigned32 Tipo di dati FloatingPoint Vedere PROFIdrive Profile V3.1 Zero (senza valori come risposta parziale positiva di un job di scrittura) Byte Word Double word Error
Formato
Formato e numero specificano il posto occupato da valori nel telegramma. Nel processo di scrittura è preferibile indicare tipi di dati conformi a PROFIdrive Profile. In alternativa sono possibili anche byte, parola e doppia parola. Unsigned8 0x00 ... 0xEA Numero 0 … 234
limitato dalla lunghezza del telegramma DPV1
Numero di valori
Indica il numero dei valori seguenti. Unsigned16
0x0000 ... 0x00FF Significato dei valori di errore --> vedere la tabella 4-29
Valori di errore
Valori di errore in caso di risposta negativa. Se i valori sono costituiti da un numero dispari di byte, viene aggiunto un byte zero. In questo modo viene garantita la struttura della parola del telegramma. Unsigned16
0x0000 ... 0x00FF Valori
I valori del parametro in caso di lettura o scrittura. Se i valori sono costituiti da un numero dispari di byte, viene aggiunto un byte zero. In questo modo viene garantita la struttura della parola del telegramma.
Per ulteriori informazioni sulla codifica dei tipi di dati PROFIdrive, vedere Tipi di dati specifici per PROFIdrive (Pagina 279)
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 290 Manuale di sistema, 11/2010
Vedere anche Esempio di programma (Pagina 317)
Lettura e scrittura di parametri con Base Mode Parameter Access (Pagina 284)
9.6.4 Specifiche per PROFIBUS DP e PROFINET IO
Parametri globali e locali In base a PROFIdrive si distinguono due aree di parametri:
● Parametri globali; sono assegnati all'intero apparecchio di azionamento. Se si desidera fare riferimento a diversi DO di un apparecchio di azionamento, un parametro globale mostra sempre lo stesso valore.
● Parametri locali; si tratta di parametri specifici per asse o DO. I parametri specifici per asse e DO possono avere valori diversi per ogni asse/DO.
In modo corrispondente si ricavano così i due tipi di accesso per il Base Mode Parameter Access:
● Base Mode Parameter Access - Local (BMPL)
● Base Mode Parameter Access - Global (BMPG)
Proprietà specifiche di una comunicazione aciclica in PROFIBUS Per la comunicazione tramite PROFIBUS viene impiegato il set di dati 47 (0x002F) per accedere ai parametri negli azionamenti PROFIdrive.
● Base Mode Parameterr Access – Global; i parametri (di tutti i DO, parametri globali e locali) dell'apparecchio di azionamento si possono richiamare tramite i PAP dell'apparecchio di azionamento.
Nota
La norma PROFIdrive stabilisce che negli azionamenti PROFIdrive non viene supportato alcun pipelining degli ordini e quindi che in un apparecchio di azionamento può esserci un solo processo "Lettura/scrittura set di dati" alla volta. Se a un controllo sono collegati più apparecchi di azionamento PROFIdrive tramite PROFIBUS, su ognuno di questi apparecchi può essere sviluppato parallelamente un ordine. Il numero massimo dipende dal controllo. I dati per SIMOTION sono indicati in Regola 5 - Possibilità di max. 5 richiami contemporanei in SIMOTION (Pagina 304).
Proprietà specifiche di una comunicazione aciclica in PROFINET IO Se si utilizza PROFINET i processi di base non vengono sostanzialmente modificati, tuttavia il numero del set di dati risulta essere 0xB02E ("Base Mode Parameter Access Local") e 0XB02F("Base Mode Parameter Access - Global").
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 291
Ai parametri globali di un azionamento si può fondalmente accedere sia con BMPL sia con BMPG tramite ciascun punto di accesso parametri (PAP/MAP) dell'azionamento.
Con BMPL all'accesso ai parametri locali (DO) avviene in automatico un indirizzamento ai parametri locali del DO a cui il PAP/MAP è assegnato. Un'indicazione dell'ID del DO nella struttura "Parameter Request" non è pertanto necessaria o viene ignorata dall'azionamento.
Use Case: Ciascun asse (DO) ha un proprio punto di accesso parametri (necessariamente per assi singoli). La scelta degli assi avviene tramite l'indirizzo logico, l'utente non deve preoccuparsi della gestione degli ID dei DO.
Con BMPG tramite il PAP/MAP del DO è possibile accedere, oltre a parametri locali propri del DO, anche ai parametri locali di altri DO. L'indirizzamento dei DO desiderati avviene tramite l'ID del DO nella struttura "Parameter Request". Ciò signigica che con BMPG deve essere trasmesso un ID del DO valido.
Use Case: Se l'accesso ai parametri di un Drive multiasse deve avvenire soltanto tramite un PAP/MAP (indirizzo logico) o se i parametri devono essere letti sui DO, che non presentano un MAP/PAP proprio (in particolare apparecchi PROFIBUS). Per questo l'utente deve occuparsi, in caso di BMPG, della gestione degli ID dei DO.
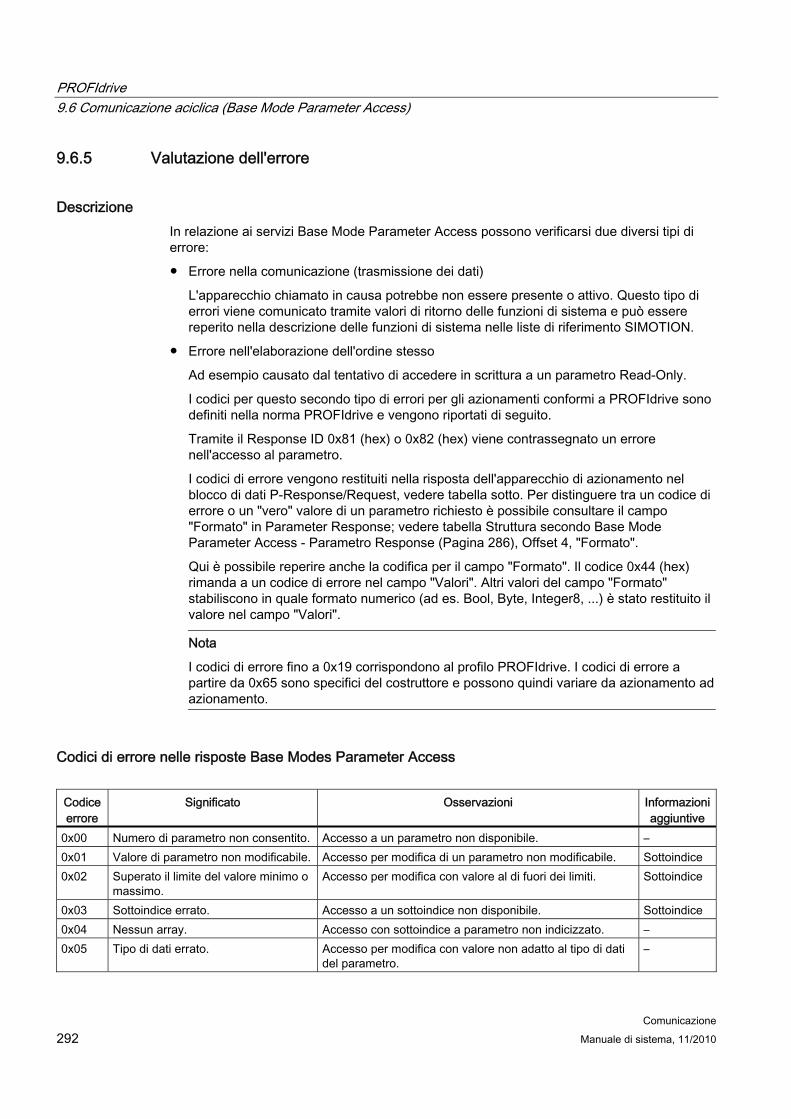
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 292 Manuale di sistema, 11/2010
9.6.5 Valutazione dell'errore
Descrizione In relazione ai servizi Base Mode Parameter Access possono verificarsi due diversi tipi di errore:
● Errore nella comunicazione (trasmissione dei dati)
L'apparecchio chiamato in causa potrebbe non essere presente o attivo. Questo tipo di errori viene comunicato tramite valori di ritorno delle funzioni di sistema e può essere reperito nella descrizione delle funzioni di sistema nelle liste di riferimento SIMOTION.
● Errore nell'elaborazione dell'ordine stesso
Ad esempio causato dal tentativo di accedere in scrittura a un parametro Read-Only.
I codici per questo secondo tipo di errori per gli azionamenti conformi a PROFIdrive sono definiti nella norma PROFIdrive e vengono riportati di seguito.
Tramite il Response ID 0x81 (hex) o 0x82 (hex) viene contrassegnato un errore nell'accesso al parametro.
I codici di errore vengono restituiti nella risposta dell'apparecchio di azionamento nel blocco di dati P-Response/Request, vedere tabella sotto. Per distinguere tra un codice di errore o un "vero" valore di un parametro richiesto è possibile consultare il campo "Formato" in Parameter Response; vedere tabella Struttura secondo Base Mode Parameter Access - Parametro Response (Pagina 286), Offset 4, "Formato".
Qui è possibile reperire anche la codifica per il campo "Formato". Il codice 0x44 (hex) rimanda a un codice di errore nel campo "Valori". Altri valori del campo "Formato" stabiliscono in quale formato numerico (ad es. Bool, Byte, Integer8, ...) è stato restituito il valore nel campo "Valori".
Nota
I codici di errore fino a 0x19 corrispondono al profilo PROFIdrive. I codici di errore a partire da 0x65 sono specifici del costruttore e possono quindi variare da azionamento ad azionamento.
Codici di errore nelle risposte Base Modes Parameter Access
Codice errore
Significato Osservazioni Informazioni aggiuntive
0x00 Numero di parametro non consentito. Accesso a un parametro non disponibile. – 0x01 Valore di parametro non modificabile. Accesso per modifica di un parametro non modificabile. Sottoindice 0x02 Superato il limite del valore minimo o
massimo. Accesso per modifica con valore al di fuori dei limiti. Sottoindice
0x03 Sottoindice errato. Accesso a un sottoindice non disponibile. Sottoindice 0x04 Nessun array. Accesso con sottoindice a parametro non indicizzato. – 0x05 Tipo di dati errato. Accesso per modifica con valore non adatto al tipo di dati
del parametro. –
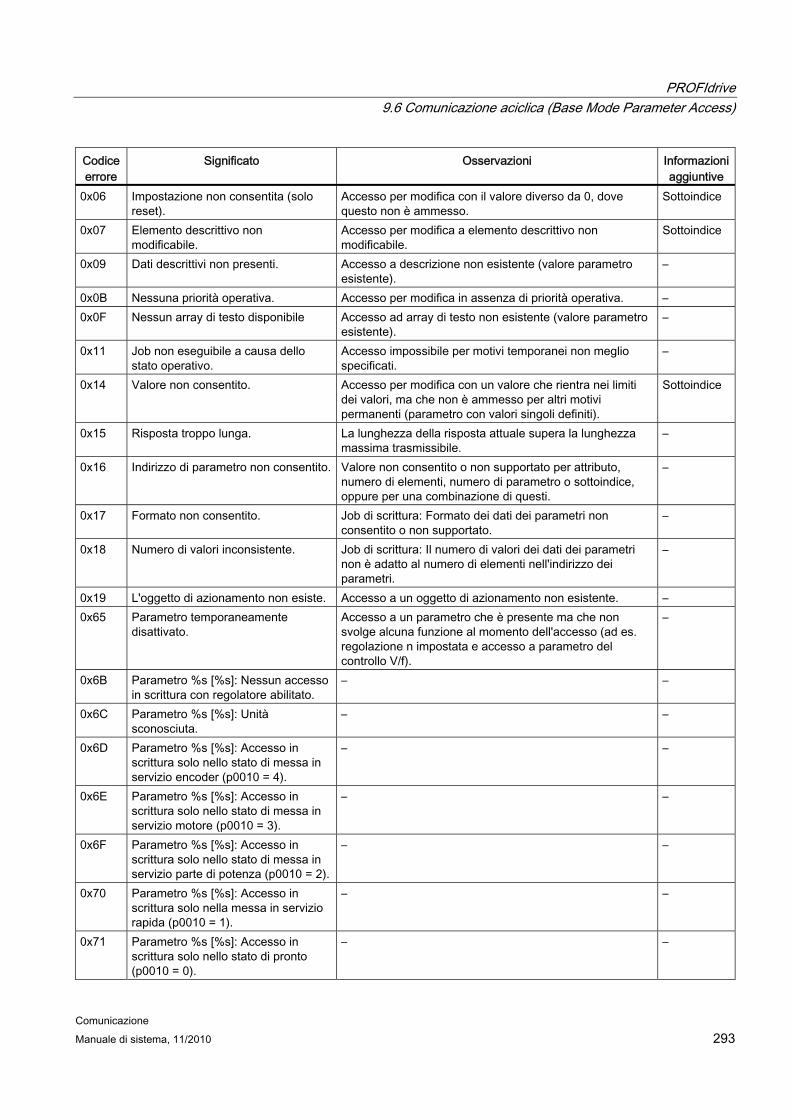
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 293
Codice errore
Significato Osservazioni Informazioni aggiuntive
0x06 Impostazione non consentita (solo reset).
Accesso per modifica con il valore diverso da 0, dove questo non è ammesso.
Sottoindice
0x07 Elemento descrittivo non modificabile.
Accesso per modifica a elemento descrittivo non modificabile.
Sottoindice
0x09 Dati descrittivi non presenti. Accesso a descrizione non esistente (valore parametro esistente).
–
0x0B Nessuna priorità operativa. Accesso per modifica in assenza di priorità operativa. – 0x0F Nessun array di testo disponibile Accesso ad array di testo non esistente (valore parametro
esistente). –
0x11 Job non eseguibile a causa dello stato operativo.
Accesso impossibile per motivi temporanei non meglio specificati.
–
0x14 Valore non consentito. Accesso per modifica con un valore che rientra nei limiti dei valori, ma che non è ammesso per altri motivi permanenti (parametro con valori singoli definiti).
Sottoindice
0x15 Risposta troppo lunga. La lunghezza della risposta attuale supera la lunghezza massima trasmissibile.
–
0x16 Indirizzo di parametro non consentito. Valore non consentito o non supportato per attributo, numero di elementi, numero di parametro o sottoindice, oppure per una combinazione di questi.
–
0x17 Formato non consentito. Job di scrittura: Formato dei dati dei parametri non consentito o non supportato.
–
0x18 Numero di valori inconsistente. Job di scrittura: Il numero di valori dei dati dei parametri non è adatto al numero di elementi nell'indirizzo dei parametri.
–
0x19 L'oggetto di azionamento non esiste. Accesso a un oggetto di azionamento non esistente. – 0x65 Parametro temporaneamente
disattivato. Accesso a un parametro che è presente ma che non svolge alcuna funzione al momento dell'accesso (ad es. regolazione n impostata e accesso a parametro del controllo V/f).
–
0x6B Parametro %s [%s]: Nessun accesso in scrittura con regolatore abilitato.
– –
0x6C Parametro %s [%s]: Unità sconosciuta.
– –
0x6D Parametro %s [%s]: Accesso in scrittura solo nello stato di messa in servizio encoder (p0010 = 4).
– –
0x6E Parametro %s [%s]: Accesso in scrittura solo nello stato di messa in servizio motore (p0010 = 3).
– –
0x6F Parametro %s [%s]: Accesso in scrittura solo nello stato di messa in servizio parte di potenza (p0010 = 2).
– –
0x70 Parametro %s [%s]: Accesso in scrittura solo nella messa in servizio rapida (p0010 = 1).
– –
0x71 Parametro %s [%s]: Accesso in scrittura solo nello stato di pronto (p0010 = 0).
– –
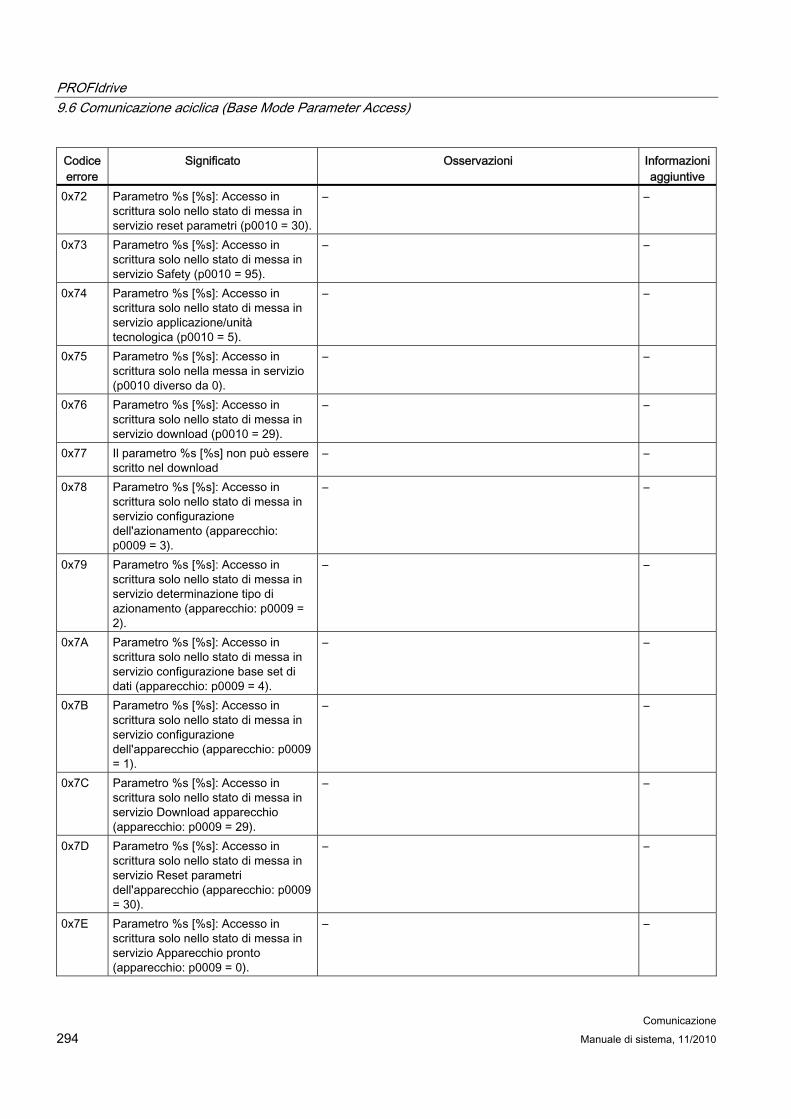
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 294 Manuale di sistema, 11/2010
Codice errore
Significato Osservazioni Informazioni aggiuntive
0x72 Parametro %s [%s]: Accesso in scrittura solo nello stato di messa in servizio reset parametri (p0010 = 30).
– –
0x73 Parametro %s [%s]: Accesso in scrittura solo nello stato di messa in servizio Safety (p0010 = 95).
– –
0x74 Parametro %s [%s]: Accesso in scrittura solo nello stato di messa in servizio applicazione/unità tecnologica (p0010 = 5).
– –
0x75 Parametro %s [%s]: Accesso in scrittura solo nella messa in servizio (p0010 diverso da 0).
– –
0x76 Parametro %s [%s]: Accesso in scrittura solo nello stato di messa in servizio download (p0010 = 29).
– –
0x77 Il parametro %s [%s] non può essere scritto nel download
– –
0x78 Parametro %s [%s]: Accesso in scrittura solo nello stato di messa in servizio configurazione dell'azionamento (apparecchio: p0009 = 3).
– –
0x79 Parametro %s [%s]: Accesso in scrittura solo nello stato di messa in servizio determinazione tipo di azionamento (apparecchio: p0009 = 2).
– –
0x7A Parametro %s [%s]: Accesso in scrittura solo nello stato di messa in servizio configurazione base set di dati (apparecchio: p0009 = 4).
– –
0x7B Parametro %s [%s]: Accesso in scrittura solo nello stato di messa in servizio configurazione dell'apparecchio (apparecchio: p0009 = 1).
– –
0x7C Parametro %s [%s]: Accesso in scrittura solo nello stato di messa in servizio Download apparecchio (apparecchio: p0009 = 29).
– –
0x7D Parametro %s [%s]: Accesso in scrittura solo nello stato di messa in servizio Reset parametri dell'apparecchio (apparecchio: p0009 = 30).
– –
0x7E Parametro %s [%s]: Accesso in scrittura solo nello stato di messa in servizio Apparecchio pronto (apparecchio: p0009 = 0).
– –
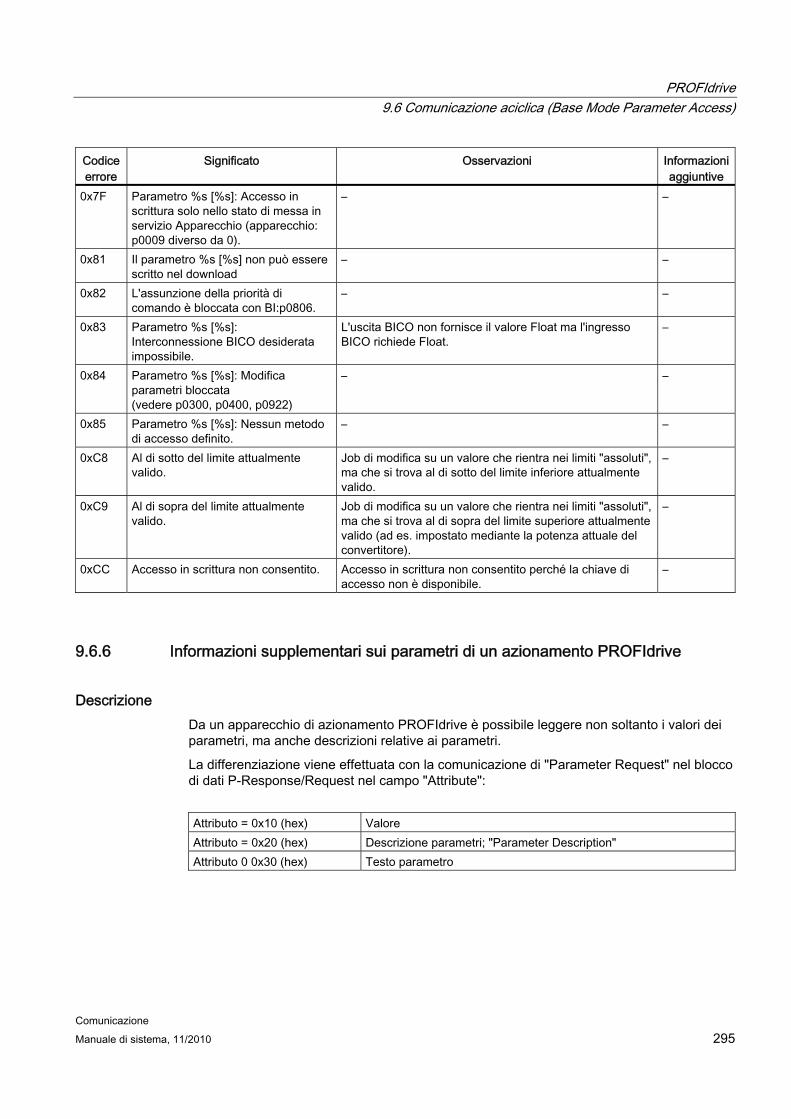
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 295
Codice errore
Significato Osservazioni Informazioni aggiuntive
0x7F Parametro %s [%s]: Accesso in scrittura solo nello stato di messa in servizio Apparecchio (apparecchio: p0009 diverso da 0).
– –
0x81 Il parametro %s [%s] non può essere scritto nel download
– –
0x82 L'assunzione della priorità di comando è bloccata con BI:p0806.
– –
0x83 Parametro %s [%s]: Interconnessione BICO desiderata impossibile.
L'uscita BICO non fornisce il valore Float ma l'ingresso BICO richiede Float.
–
0x84 Parametro %s [%s]: Modifica parametri bloccata (vedere p0300, p0400, p0922)
– –
0x85 Parametro %s [%s]: Nessun metodo di accesso definito.
– –
0xC8 Al di sotto del limite attualmente valido.
Job di modifica su un valore che rientra nei limiti "assoluti", ma che si trova al di sotto del limite inferiore attualmente valido.
–
0xC9 Al di sopra del limite attualmente valido.
Job di modifica su un valore che rientra nei limiti "assoluti", ma che si trova al di sopra del limite superiore attualmente valido (ad es. impostato mediante la potenza attuale del convertitore).
–
0xCC Accesso in scrittura non consentito. Accesso in scrittura non consentito perché la chiave di accesso non è disponibile.
–
9.6.6 Informazioni supplementari sui parametri di un azionamento PROFIdrive
Descrizione Da un apparecchio di azionamento PROFIdrive è possibile leggere non soltanto i valori dei parametri, ma anche descrizioni relative ai parametri.
La differenziazione viene effettuata con la comunicazione di "Parameter Request" nel blocco di dati P-Response/Request nel campo "Attribute":
Attributo = 0x10 (hex) Valore Attributo = 0x20 (hex) Descrizione parametri; "Parameter Description" Attributo 0 0x30 (hex) Testo parametro
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 296 Manuale di sistema, 11/2010
Se al posto del valore riferito a un parametro viene richiesta la relativa "Parameter Description", il campo "Value" in "Parameter Response" contiene la descrizione (tipo di dati, ev. numero di indici del parametro, ...).
Nota
Normalmente le descrizioni dei parametri si possono solo leggere.
9.6.7 Comandi di sistema in SIMOTION
9.6.7.1 Comandi di sistema SIMOTION _writeRecord/_readRecord
Descrizione Per il processo "Scrittura set di dati" in SIMOTION è possibile impiegare il comando di sistema _writeRecord(). Per il processo "Lettura set di dati" in SIMOTION è possibile impiegare il comando di sistema _readRecord(). In questo modo è anche possibile leggere o scrivere parametri in un azionamento PROFIdrive, nonché leggerne la relativa descrizione.
La descrizione delle funzioni di sistema e dei relativi parametri di ingresso e valori di ritorno è disponibile nella documentazione del sistema SIMOTION:
● lista riferimenti C2xx
● lista riferimenti D4XX
● lista riferimenti P3xx
Questi comandi di sistema _write/_readRecord si possono impiegare a livello universale, non soltanto per azionamenti PROFIdrive, ma anche ad es. per sensori intelligenti in PROFIBUS o in altre unità periferiche, che supportano i cosiddetti servizi DP-V1 di PROFIBUS.
Nota
In SIMATIC le funzioni di sistema corrispondenti sono:
Scrittura set di dati SFB52 WR_REC
Lettura set di dati SFB53 WR_REC
Per poter utilizzare i comandi di sistema SIMOTION _write/_readRecord occorre quanto segue:
● PROFIBUS DP: è possibile sia un accesso tramite indirizzo I/O logico che un inidirizzo di diagnostica.
● PROFINET IO: è possibile l'accesso solo tramite l'indirizzo di diagnostica di un Parameter Access Points (PAP).
Inoltre DO-ID è rilevante solo per il set di dati 47 (0x002f) e per Global Access (PROFINET 0xb02f). Per Local Access (PROFINET IO 0xb02e) è rilevante l'indirizzo di diagnostica del relativo PAP, mentre DO-ID non viene valutato.
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 297
Così, ad es., in relazione agli azionamenti PROFIdrive, nell'apparecchio è necessario l'indirizzo iniziale del telegramma PROFIdrive scambiato ciclicamente.
Se un azionamento su un apparecchio di azionamento presenta più assi (con un'attivazione PROFIBUS condivisa), oltre alla differenziazione degli assi nello stesso apparecchio è necessario anche il numero asse "Axis-No." o "DO-ID" nel set di dati 47. Esempi di tali azionamenti a più assi sono SIMODRIVE 611universal o SINAMICS S120. Per la definizione di "DO-ID" in SINAMICS S120, vedere il Manuale per la messa in servizio SINAMICS S120 Comunicazione aciclica.
Tramite "Axis-No." o "DO-ID" = 0 è possibile accedere ai cosiddetti "parametri globali". Esempi di tali "parametri globali" sono:
● P0918: Indirizzo PROFIBUS
● P0964: Identificazione Device (tra l'altro produttore, versione, numero di assi)
● P0965: Numero profilo (versione PROFIdrive implementata)
● P0978: Lista di DO-ID (quale "Axis-No." o "DO-ID" è stato impostato)
9.6.7.2 Comandi di sistema SIMOTION _writeDrive.../_readDrive...
Descrizione Mentre le funzioni di sistema _readRecord e _writeRecord si possono utilizzare universalmente e sono quindi idonee per tutti gli apparecchi in PROFIBUS che supportano i cosiddetti servizi DP-V1 "Scrittura/lettura set di dati", i comandi seguenti sono concepiti specificamente per azionamenti PROFIdrive in base al profilo PROFIdrive:
● _read/writeDriveParameter (legge/scrive un parametro di azionamento eventualmente consigliato)
● _read/writeDriveMultiParameter (legge/scrive più parametri eventualmente consigliati per un azionamento o un oggetto di azionamento)
● _readDriveFaults (legge la voce del buffer dei guasti corrente di un azionamento o di un oggetto di azionamento)
● _readDriveParameterDescription (legge i dati della descrizione di un parametro dell'azionamento o dell'oggetto di azionamento)
● _readDriveMultiParameterDescription (legge i dati della descrizione di più parametri dell'azionamento o dell'oggetto di azionamento)
I comandi creano internamente il set di dati 47 necessario per le singole funzioni secondo il profilo PROFIdrive in base ai parametri trasmessi dall'utente al momento del richiamo delle funzioni di sistema e sviluppano autonomamente la comunicazione con l'azionamento PROFIdrive tramite "Lettura/scrittura set di dati".
La descrizione dei comandi è disponibile nella documentazione del sistema SIMOTION; vedere liste di riferimento della rispettiva piattaforma.
Vedere anche Campo di validità per le regole (Pagina 306)
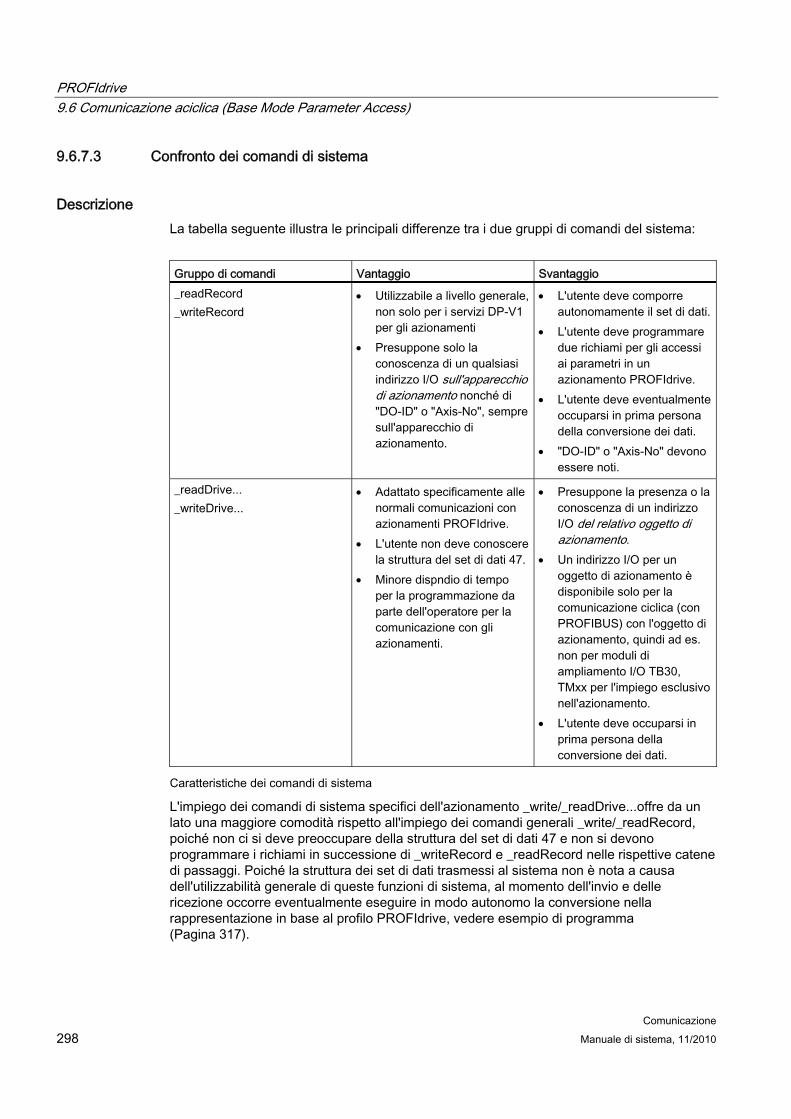
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 298 Manuale di sistema, 11/2010
9.6.7.3 Confronto dei comandi di sistema
Descrizione La tabella seguente illustra le principali differenze tra i due gruppi di comandi del sistema:
Gruppo di comandi Vantaggio Svantaggio _readRecord _writeRecord
Utilizzabile a livello generale, non solo per i servizi DP-V1 per gli azionamenti
Presuppone solo la conoscenza di un qualsiasi indirizzo I/O sull'apparecchio di azionamento nonché di "DO-ID" o "Axis-No", sempre sull'apparecchio di azionamento.
L'utente deve comporre autonomamente il set di dati.
L'utente deve programmare due richiami per gli accessi ai parametri in un azionamento PROFIdrive.
L'utente deve eventualmente occuparsi in prima persona della conversione dei dati.
"DO-ID" o "Axis-No" devono essere noti.
_readDrive... _writeDrive...
Adattato specificamente alle normali comunicazioni con azionamenti PROFIdrive.
L'utente non deve conoscere la struttura del set di dati 47.
Minore dispndio di tempo per la programmazione da parte dell'operatore per la comunicazione con gli azionamenti.
Presuppone la presenza o la conoscenza di un indirizzo I/O del relativo oggetto di azionamento.
Un indirizzo I/O per un oggetto di azionamento è disponibile solo per la comunicazione ciclica (con PROFIBUS) con l'oggetto di azionamento, quindi ad es. non per moduli di ampliamento I/O TB30, TMxx per l'impiego esclusivo nell'azionamento.
L'utente deve occuparsi in prima persona della conversione dei dati.
Caratteristiche dei comandi di sistema
L'impiego dei comandi di sistema specifici dell'azionamento _write/_readDrive...offre da un lato una maggiore comodità rispetto all'impiego dei comandi generali _write/_readRecord, poiché non ci si deve preoccupare della struttura del set di dati 47 e non si devono programmare i richiami in successione di _writeRecord e _readRecord nelle rispettive catene di passaggi. Poiché la struttura dei set di dati trasmessi al sistema non è nota a causa dell'utilizzabilità generale di queste funzioni di sistema, al momento dell'invio e delle ricezione occorre eventualmente eseguire in modo autonomo la conversione nella rappresentazione in base al profilo PROFIdrive, vedere esempio di programma (Pagina 317).
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 299
L'uso dei comandi _write/_readDrive... fino a SIMOTION V4.1 si limita ai casi in cui vi è un traffico di dati ciclico con il rispettivo oggetto di azionamento, poiché viene impiegato come parametro di immissione. A partire da questa versione è possibile trasmettere l'ID del DO o l'Axis-No tramite il parametro doId delle funzioni di sistema. In questo modo è possibile comunicare con ciascun DO anche se si tratta di un traffico dati aciclico.
D'altra parte con _write/_readRecord è possibile accedere a oggetti di azionamento anche se non esiste alcun traffico ciclico dei dati (o se il relativo indirizzo I/O nell'applicazione non è noto). Ciò avviene quindi con _write/_readRecord, poiché per la composizione del set di dati 47 è sufficiente la conoscenza esplicita di "DO-ID" o "Axis-No.", nonché di un qualsiasi indirizzo I/O sull'apparecchio. Ciò può essere utile ad es. se si utilizzano singoli oggetti solo internamente all'azionamento (cioè senza traffico di telegrammi ciclico con il controllo) oppure se questo non è noto a livello generale nella "programmazione generica".
9.6.7.4 Cancellazione di ordini _readDrive- e _writeDrive
Descrizione Se si desidera interrompere o cancellare gli ordini di lettura o scrittura non corretti, richiamati ad es. con _readDriveParameter, è possibile avvalersi delle funzioni seguenti:
● _abortReadWriteRecordJobs, per le funzioni _readRecord bzw. _writeRecord
● _abortAllReadWriteDriveParameterJobs, per le funzioni
– _readDrive(Multi)ParameterDescription
– _readDrive(Multi)Parameter
– _writeDrive(Multi)Parameter
– _readDriveFaults
È possibile richiamare le funzioni senza conoscere o leggere il CommandID.
9.6.8 Regole per l'applicazione di _readRecord e _writeRecord
9.6.8.1 Regola 1 - L'ordine ha un proprio riferimento d'ordine
Ogni ordine riceve un proprio riferimento, necessario per poter assegnare i differenti ordini. Il riferimento d'ordine può essere riutilizzato se l'assegnazione risulta chiara anche in altro modo, ad es. tramite sequenza temporale.
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 300 Manuale di sistema, 11/2010
9.6.8.2 Regola 2 - Funzioni di sistema con programmazione asincrona
Descrizione R2: Con la programmazione asincrona la funzione di sistema deve essere richiamata ripetutamente con lo stesso ID, fino alla conclusione della funzione stessa ("fondista"). Nella figura Processo senza errori con le funzioni di sistema _readRecord e _writeRecord viene rappresentato l'utilizzo privo di errori delle funzioni di sistema _writeRecord e _readRecord sull'esempio della comunicazione con SINAMICS S120.
La comunicazione per la scrittura e la lettura di parametri con SINAMICS S120 avviene sempre tramite il set di dati 47, la cui struttura è descritta nella documentazione di SINAMICS S120; vedere Manuale per la messa in servizio SINAMICS S120, comunicazione aciclica.
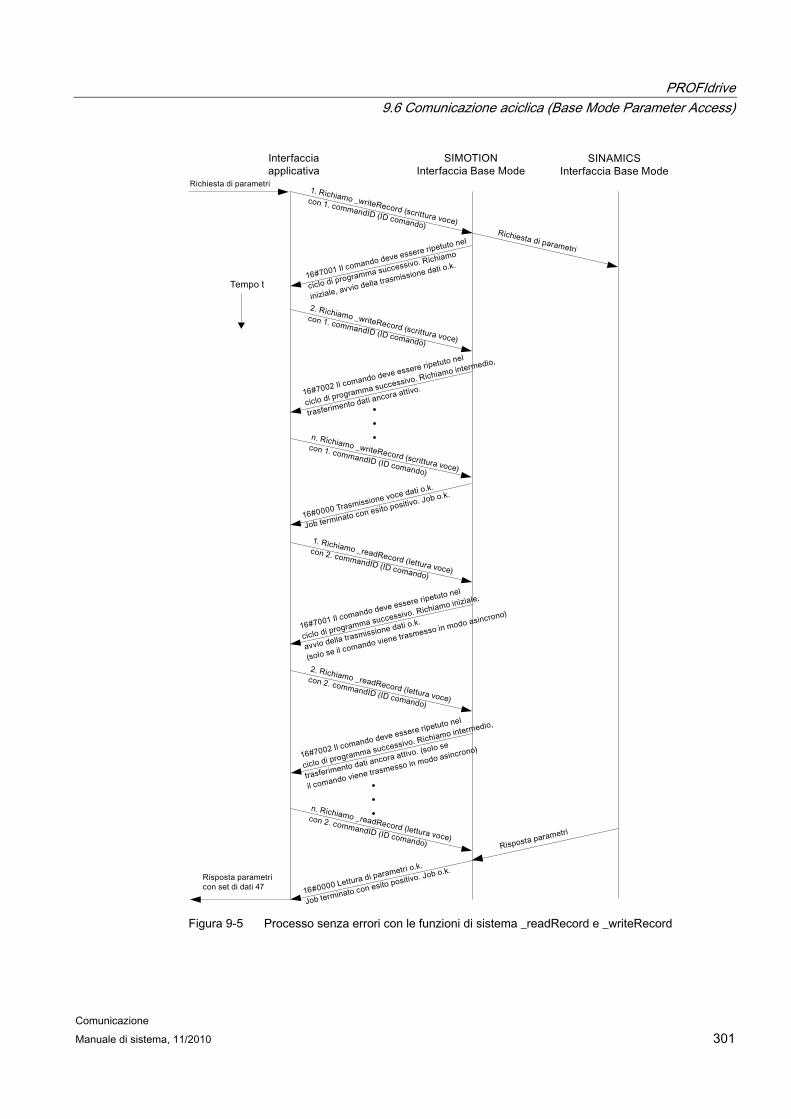
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 301
Figura 9-5 Processo senza errori con le funzioni di sistema _readRecord e _writeRecord
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 302 Manuale di sistema, 11/2010
9.6.8.3 Regola 3 - Un set di dati scrittura/lettura per ogni apparecchio di azionamento PROFIdrive
Soltanto un set di dati scrittura/lettura alla volta per ogni apparecchio di azionamento PROFIDrive Nel profilo PROFIdrive è stabilito che gli azionamenti PROFIdrive non eseguano alcun pipelining e possano elaborare soltanto un ordine alla volta. Ciò è quindi descritto anche per SINAMICS S120 nel Manuale per la messa in servizio.
Nota
È irrilevante tramite quali funzioni di sistema avviene la trasmissione nel controllo. Un azionamento PROFIdrive può elaborare soltanto un ordine alla volta.
Nota
Ne consegue la possibilità per altri apparecchi in PROFIBUS di supportare parallelamente più "Set di dati scrittura/lettura".
Nota
Poiché le funzioni di sistema _write/_readRecord si possono impiegare universalmente, per il controllo non è stabilito che possa essere impiegato soltanto un "set di dati scrittura/lettura" alla volta per ogni azionamento PROFIdrive.
Conseguenza per l'applicazione sul controllo:
occorre impedire che l'applicazione o diverse parti dell'applicazione spediscano ordini contemporaneamente o in sovrapposizione allo stesso apparecchio di azionamento PROFIdrive; vedere anche paragrafo in Bloccaggio di più richiami (Pagina 307).
9.6.8.4 Regola 4 - In SIMOTION vince l'ultimo richiamo
In SIMOTION in caso di dubbio "vince" l'ultimo richiamo Se la regola 3 "Soltanto un set di dati scrittura/lettura alla volta per ogni apparecchio di azionamento PROFIdrive" viene violata, con l'attivazione contemporanea di un secondo comando _writeRecord sullo stesso azionamento, la risposta del primo ordine non può più essere letta. La risposta al primo ordine non può più essere elaborata dall'azionamento e il relativo tentativo viene confermato con un errore e interrotto. La sequenza temporale è mostrata nella figura In caso di dubbio vince il secondo richiamo di _writeRecord.
Per poter distinguere tra loro gli ordini sul lato del controllo, per i richiami delle funzioni di sistema _writeRecord e _readRecord vengono impiegati commandID separati.
Per poter distinguere tra loro anche gli ordini sul lato dell'azionamento, per il primo e il secondo ordine sono stati assegnati riferimenti propri nel set di dati 47.
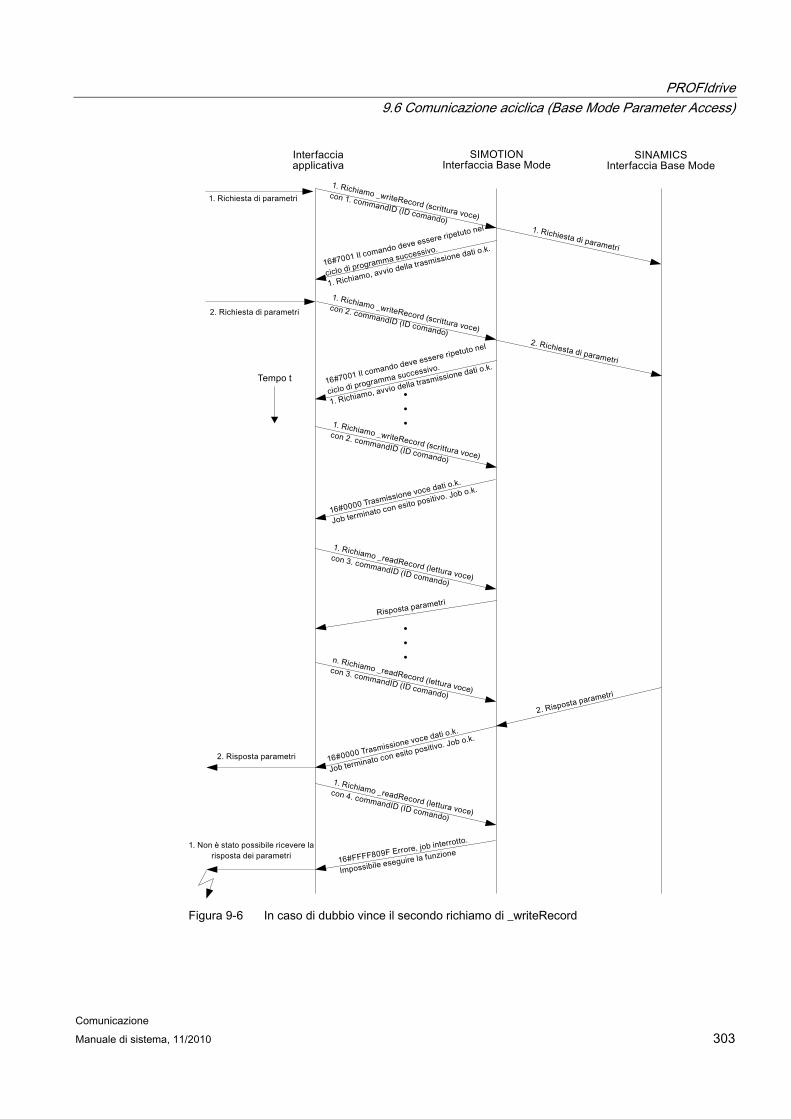
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 303
Figura 9-6 In caso di dubbio vince il secondo richiamo di _writeRecord
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 304 Manuale di sistema, 11/2010
9.6.8.5 Regola 5 - Possibilità di max. 5 richiami contemporanei in SIMOTION
SIMOTION può gestire contemporaneamente al max. 8 richiami di _write/_readRecord Benché in base alla regola 3 (vedere Regola 3 (Pagina 302)) si possa eseguire soltanto un ordine alla volta da un apparecchio di azionamento PROFIdrive, è comunque possibile attivare più ordini contemporaneamente dal programma di controllo.
Ciò non è significativo per un azionamento PROFIdrive, mentre può esserlo per la comunicazione con più azionamenti paralleli (o ev. con altri apparecchi che la supportano).
SIMOTION ha le risorse per gestire contemporaneamente un max. di 8 richiami di _write/_readRecord. La distinzione avviene tramite il commandID di _write/_readRecord. Se si tenta di attivare contemporaneamente un nuovo richiamo, il tentativo viene confermato e impedito con un errore del controllo.
La sequenza temporale è mostrata nella figura Gestione contemporanea di 8 ordini.
All'inizio vengono attivati, ma non conclusi, sette ordini _writeRecord (nessun ulteriore richiamo di _writeRecord, per portare gli ordini fino alla conclusione). L'ottavo ordine _writeRecord viene quindi attivato e poi elaborato fino alla conlusione. Successivamente è possibile attivare un nuovo ordine (che però in questo caso non può essere ulteriormente elaborato dal programma utente). La funzione di sistema SIMOTION _writeRecord conferma quindi il tentativo di attivare il decimo ordine con l'errore 16#80C3, poiché questo sarebbe il nono ordine "aperto".
Nota
Il limite superiore vale per ogni controllo SIMOTION, non per ogni segmento bus sul controllo. È quindi irrilevante se gli apparecchi di destinazione chiamati in causa vengono impiegati in un segmento PROFIBUS o sono distribuiti su più segmenti.
Nota
Poiché le funzioni di sistema _write/_readRecord si possono impiegare universalmente, per il controllo non è stabilito che possa essere impiegato soltanto un "set di dati scrittura/lettura" alla volta per ogni azionamento PROFIdrive.
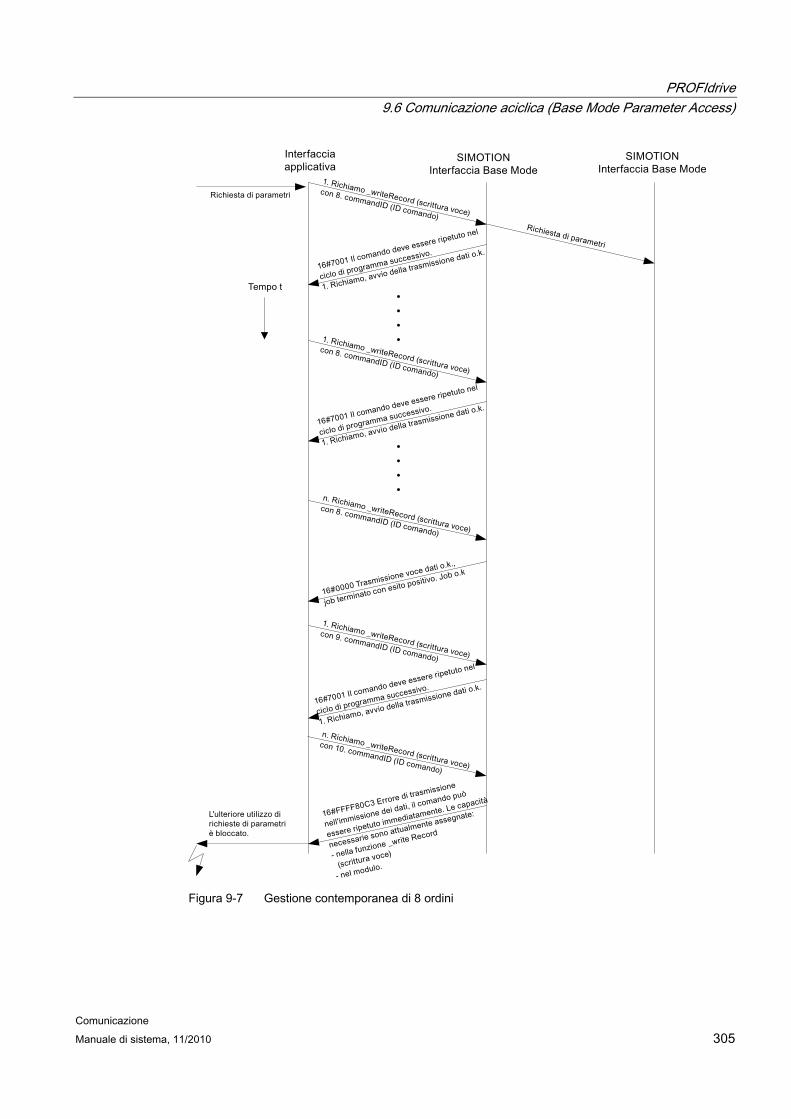
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 305
Figura 9-7 Gestione contemporanea di 8 ordini
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 306 Manuale di sistema, 11/2010
Nota
Se si verifica l'errore 16#80C3, è necessario posizionare la CPU su STOP e poi di nuovo su RUN. In questo modo il buffer degli ordini viene cancellato. Per evitare errori, nell'impossibilità di chiudere un ordine è necessario terminarlo con il comando Abort.
9.6.9 Regole per comandi SIMOTION _writeDrive.../_readDrive...
9.6.9.1 Campo di validità per le regole
Descrizione Gli esempi seguenti si riferiscono alla funzione di sistema _readDriveParameter. Le descrizioni si applicano in modo analogo anche alle altre funzioni di sistema già menzionate _writeDrive.../_readDrive... .
9.6.9.2 Regola 6 - Richiamo della funzione di sistema con la programmazione asincrona
Descrizione Con la programmazione asincrona l'utente deve richiamare ripetutamente la funzione di sistema con lo stesso ID, fino alla conclusione della funzione stessa ("fondista").
Nella figura seguente viene mostrato l'impiego senza errori della funzione di sistema _readDriveParameter.
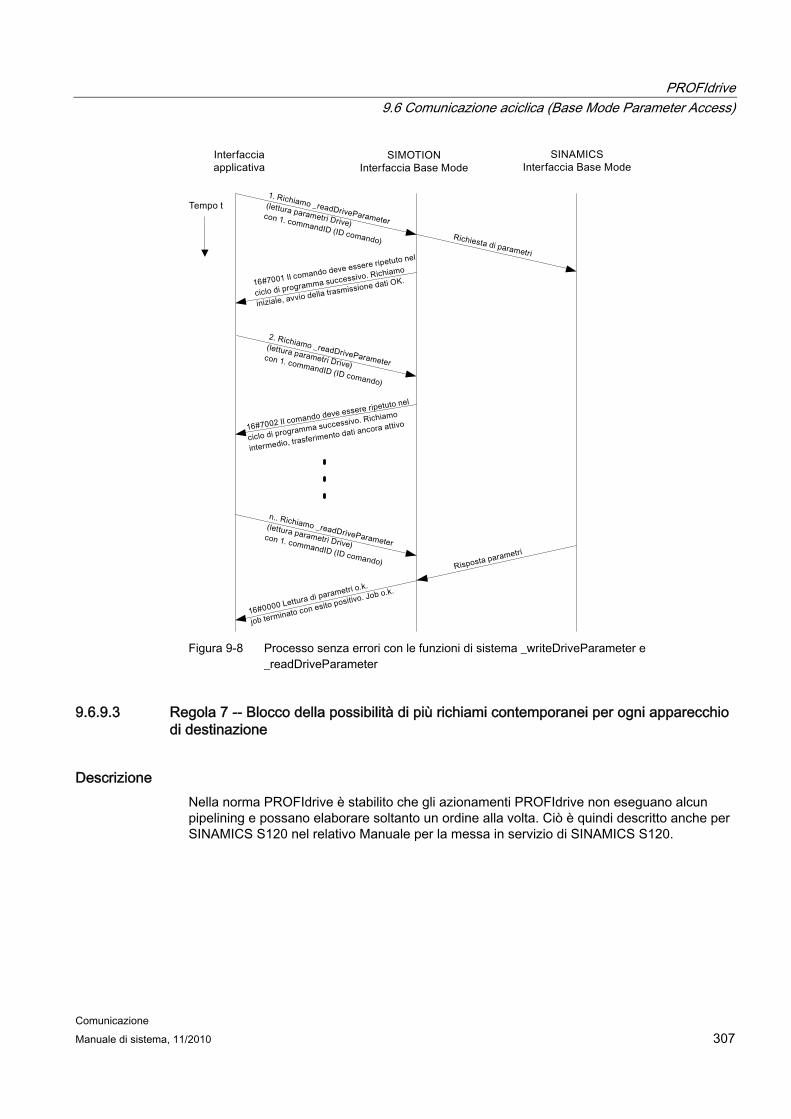
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 307
Figura 9-8 Processo senza errori con le funzioni di sistema _writeDriveParameter e
_readDriveParameter
9.6.9.3 Regola 7 -- Blocco della possibilità di più richiami contemporanei per ogni apparecchio di destinazione
Descrizione Nella norma PROFIdrive è stabilito che gli azionamenti PROFIdrive non eseguano alcun pipelining e possano elaborare soltanto un ordine alla volta. Ciò è quindi descritto anche per SINAMICS S120 nel relativo Manuale per la messa in servizio di SINAMICS S120.
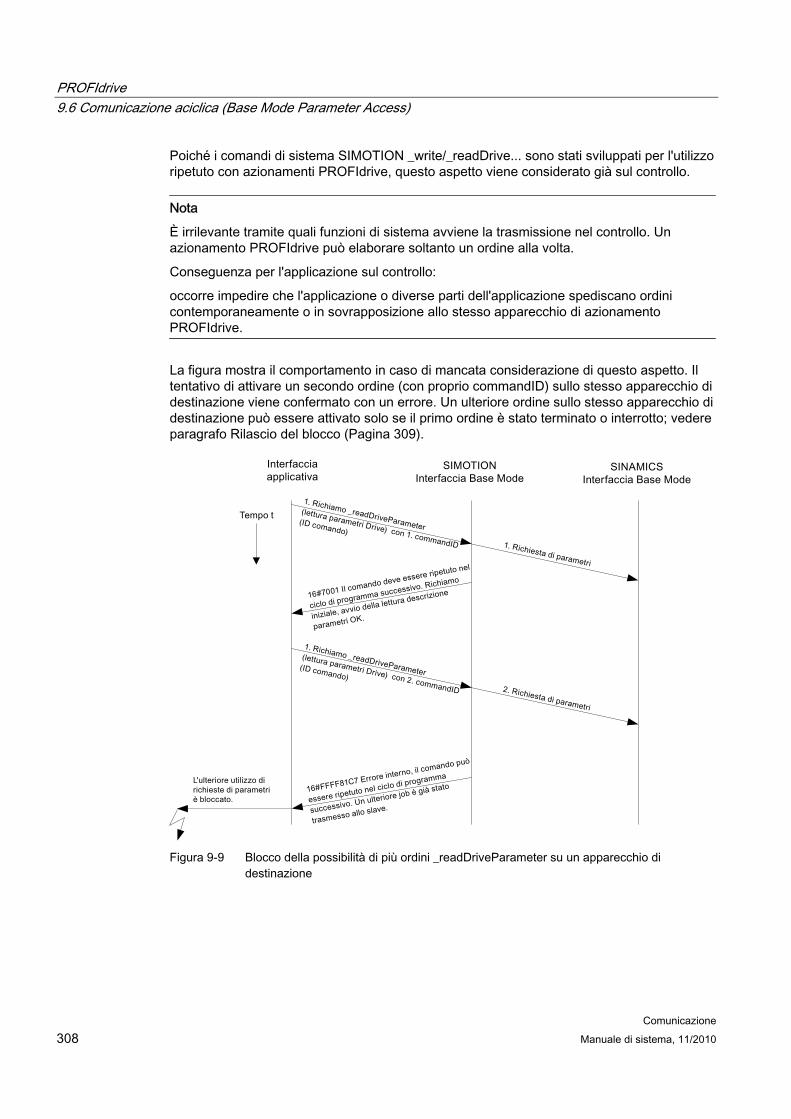
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 308 Manuale di sistema, 11/2010
Poiché i comandi di sistema SIMOTION _write/_readDrive... sono stati sviluppati per l'utilizzo ripetuto con azionamenti PROFIdrive, questo aspetto viene considerato già sul controllo.
Nota
È irrilevante tramite quali funzioni di sistema avviene la trasmissione nel controllo. Un azionamento PROFIdrive può elaborare soltanto un ordine alla volta.
Conseguenza per l'applicazione sul controllo:
occorre impedire che l'applicazione o diverse parti dell'applicazione spediscano ordini contemporaneamente o in sovrapposizione allo stesso apparecchio di azionamento PROFIdrive.
La figura mostra il comportamento in caso di mancata considerazione di questo aspetto. Il tentativo di attivare un secondo ordine (con proprio commandID) sullo stesso apparecchio di destinazione viene confermato con un errore. Un ulteriore ordine sullo stesso apparecchio di destinazione può essere attivato solo se il primo ordine è stato terminato o interrotto; vedere paragrafo Rilascio del blocco (Pagina 309).
Figura 9-9 Blocco della possibilità di più ordini _readDriveParameter su un apparecchio di
destinazione
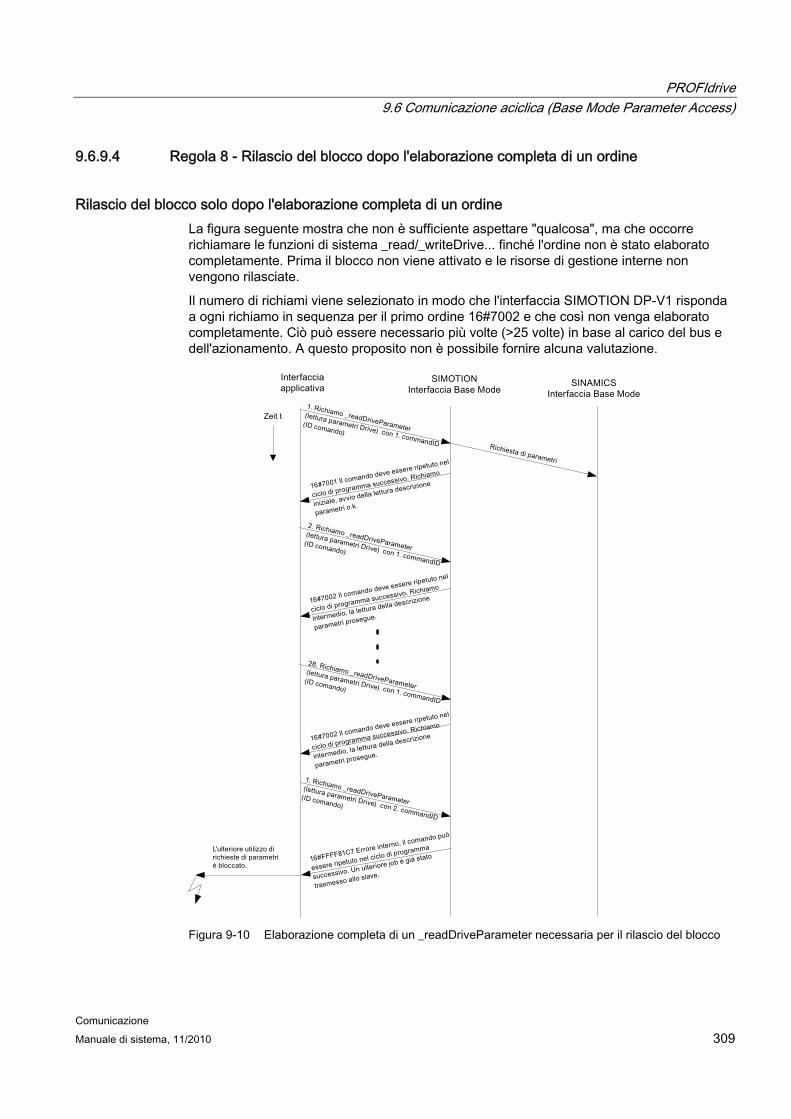
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 309
9.6.9.4 Regola 8 - Rilascio del blocco dopo l'elaborazione completa di un ordine
Rilascio del blocco solo dopo l'elaborazione completa di un ordine La figura seguente mostra che non è sufficiente aspettare "qualcosa", ma che occorre richiamare le funzioni di sistema _read/_writeDrive... finché l'ordine non è stato elaborato completamente. Prima il blocco non viene attivato e le risorse di gestione interne non vengono rilasciate.
Il numero di richiami viene selezionato in modo che l'interfaccia SIMOTION DP-V1 risponda a ogni richiamo in sequenza per il primo ordine 16#7002 e che così non venga elaborato completamente. Ciò può essere necessario più volte (>25 volte) in base al carico del bus e dell'azionamento. A questo proposito non è possibile fornire alcuna valutazione.
Figura 9-10 Elaborazione completa di un _readDriveParameter necessaria per il rilascio del blocco
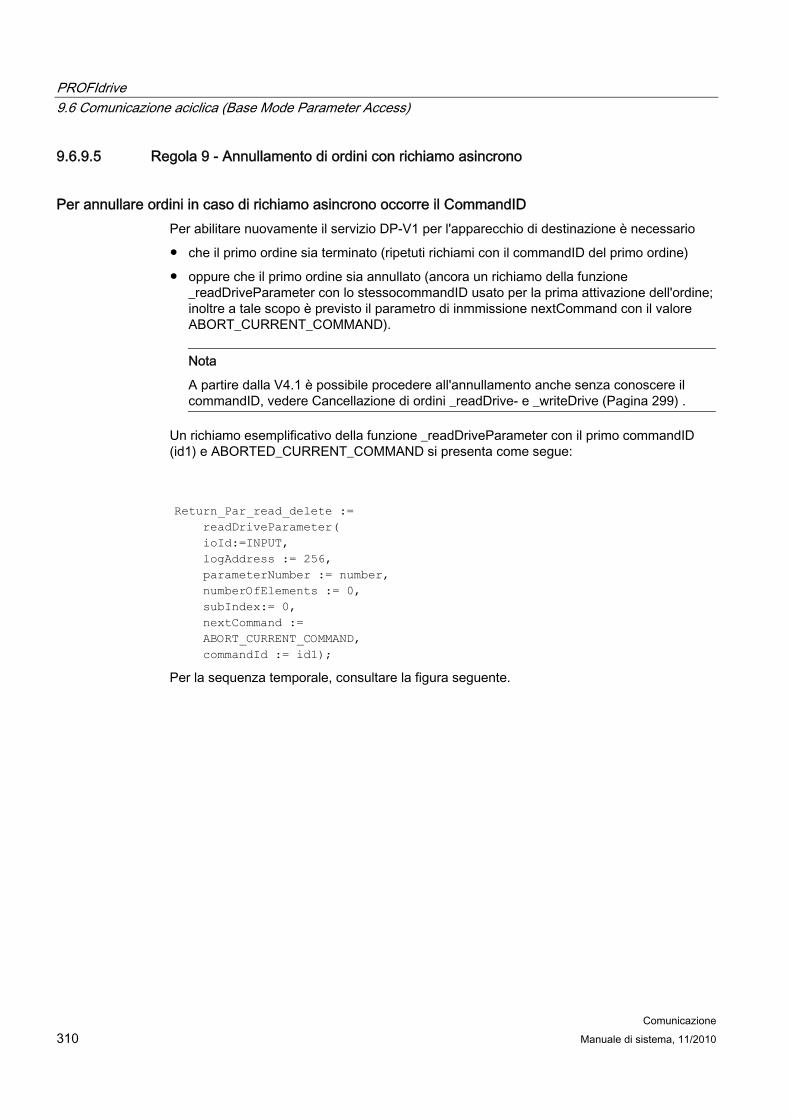
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 310 Manuale di sistema, 11/2010
9.6.9.5 Regola 9 - Annullamento di ordini con richiamo asincrono
Per annullare ordini in caso di richiamo asincrono occorre il CommandID Per abilitare nuovamente il servizio DP-V1 per l'apparecchio di destinazione è necessario
● che il primo ordine sia terminato (ripetuti richiami con il commandID del primo ordine)
● oppure che il primo ordine sia annullato (ancora un richiamo della funzione _readDriveParameter con lo stessocommandID usato per la prima attivazione dell'ordine; inoltre a tale scopo è previsto il parametro di inmmissione nextCommand con il valore ABORT_CURRENT_COMMAND).
Nota
A partire dalla V4.1 è possibile procedere all'annullamento anche senza conoscere il commandID, vedere Cancellazione di ordini _readDrive- e _writeDrive (Pagina 299) .
Un richiamo esemplificativo della funzione _readDriveParameter con il primo commandID (id1) e ABORTED_CURRENT_COMMAND si presenta come segue:
Return_Par_read_delete := readDriveParameter( ioId:=INPUT, logAddress := 256, parameterNumber := number, numberOfElements := 0, subIndex:= 0, nextCommand := ABORT_CURRENT_COMMAND, commandId := id1);
Per la sequenza temporale, consultare la figura seguente.
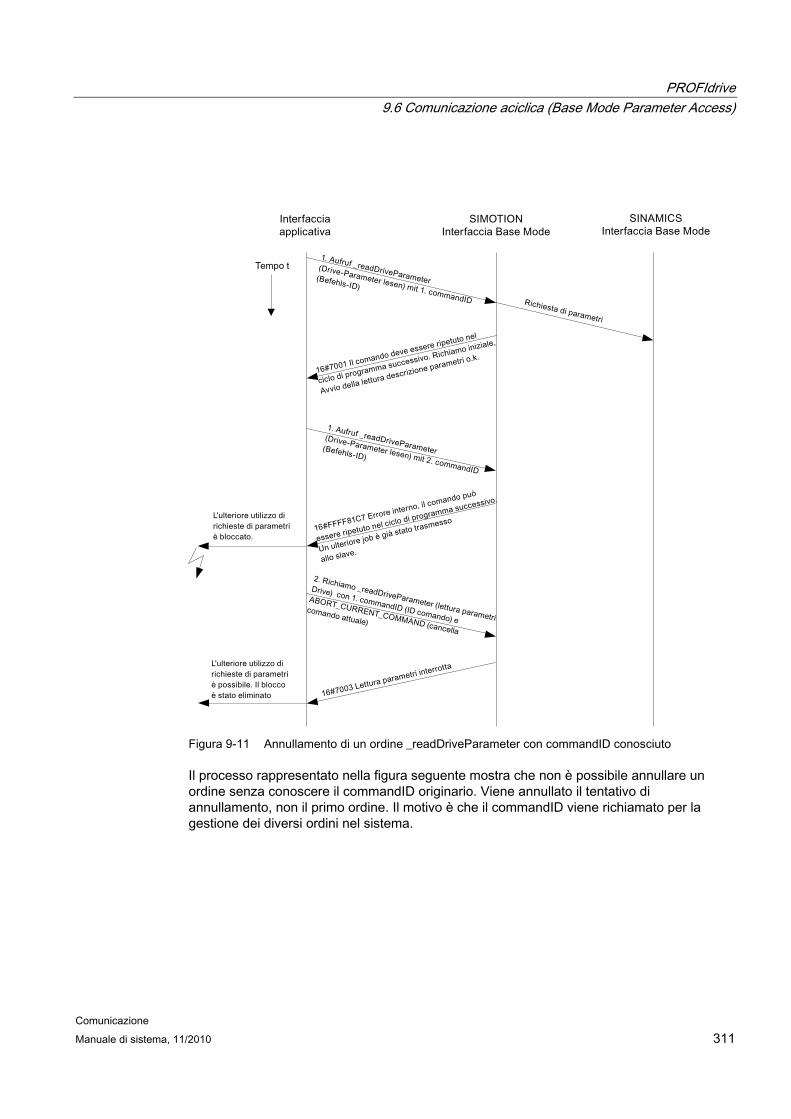
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 311
Figura 9-11 Annullamento di un ordine _readDriveParameter con commandID conosciuto
Il processo rappresentato nella figura seguente mostra che non è possibile annullare un ordine senza conoscere il commandID originario. Viene annullato il tentativo di annullamento, non il primo ordine. Il motivo è che il commandID viene richiamato per la gestione dei diversi ordini nel sistema.
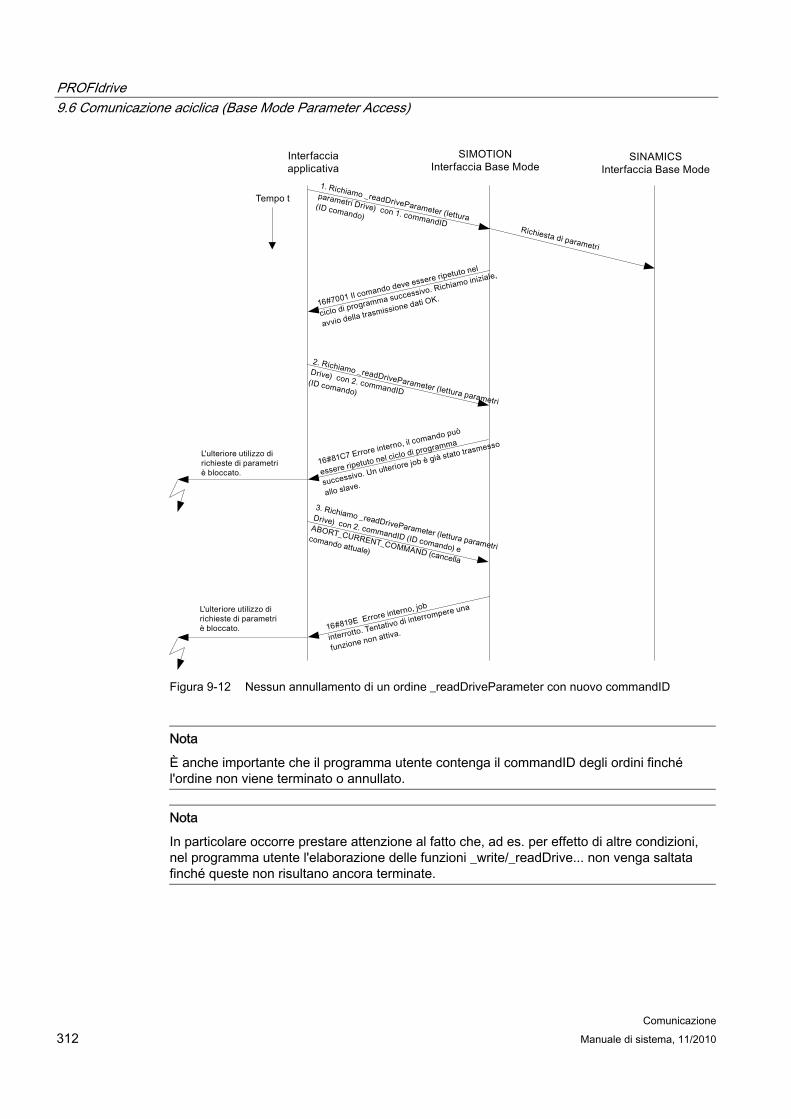
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 312 Manuale di sistema, 11/2010
Figura 9-12 Nessun annullamento di un ordine _readDriveParameter con nuovo commandID
Nota
È anche importante che il programma utente contenga il commandID degli ordini finché l'ordine non viene terminato o annullato.
Nota
In particolare occorre prestare attenzione al fatto che, ad es. per effetto di altre condizioni, nel programma utente l'elaborazione delle funzioni _write/_readDrive... non venga saltata finché queste non risultano ancora terminate.
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 313
9.6.9.6 Regola 10 - Amministrazione di 16 ordini
SIMOTION amministra parallelamente un max. di 16 richiami per diversi apparecchi Nel controllo sono disponibili risorse limitate (spazio di memoria) per il salvataggio di dati di amministrazione per richiami delle funzioni di sistema _write/_readDrive... . Se vengono attivati parallelamente troppi richiami, viene emesso un messaggio di errore, analogamente a quanto avviene con il superamento del limite _read/_writeRecord nel paragrafo Numero massimo di richiami (Pagina 304).
SIMOTION ha le risorse per gestire contemporaneamente un max. di 16 richiami di comandi di sistema _writeDrive.../_readDrive... La distinzione avviene in base al commandID. Se si tenta di attivare contemporaneamente un settimo richiamo, il tentativo viene confermato e impedito con un errore del controllo.
9.6.9.7 Regola 11 - Ordini paralleli di diversi apparecchi di azionamento
Esiste la possibilità di ordini paralleli in diversi apparecchi di azionamento La figura Elaborazione parallela di ordini _readDriveParameter mostra che è possibile sviluppare parallelamente ordini con diversi apparecchi di azionamento. Il SINAMICS Integrated di un D445 (ad es.) viene impiegato come primo apparecchio di azionamento PROFIdrive e l'unità di ampliamento CX32 come secondo apparecchio di azionamento PROFIdrive di un controllo SIMOTION D445.
Complessivamente nell'esempio vengono attivati tre ordini di lettura (due ordini sul primo apparecchio di azionamento (SINAMICS Integrated) e un ordine nel secondo apparecchio di azionamento (CX32)) tramite la funzione di sistema _readDriveParameter.
● Il primo ordine di lettura per SINAMICS Integrated viene richiamato intenzionalmente soltanto una volta, in modo da chiamare in causa il blocco.
● Successivamente viene attivato il secondo ordine di lettura nel secondo apparecchio di azionamenro PROFIdrive (CX32). Questo ordine viene elaborato con risultati positivi.
● Il terzo ordine di lettura è nuovamente indirizzato al primo apparecchio di azionamento (SINAMICS Integrated) e non può più essere eseguito correttamente a causa del primo ordine ancora in corso.
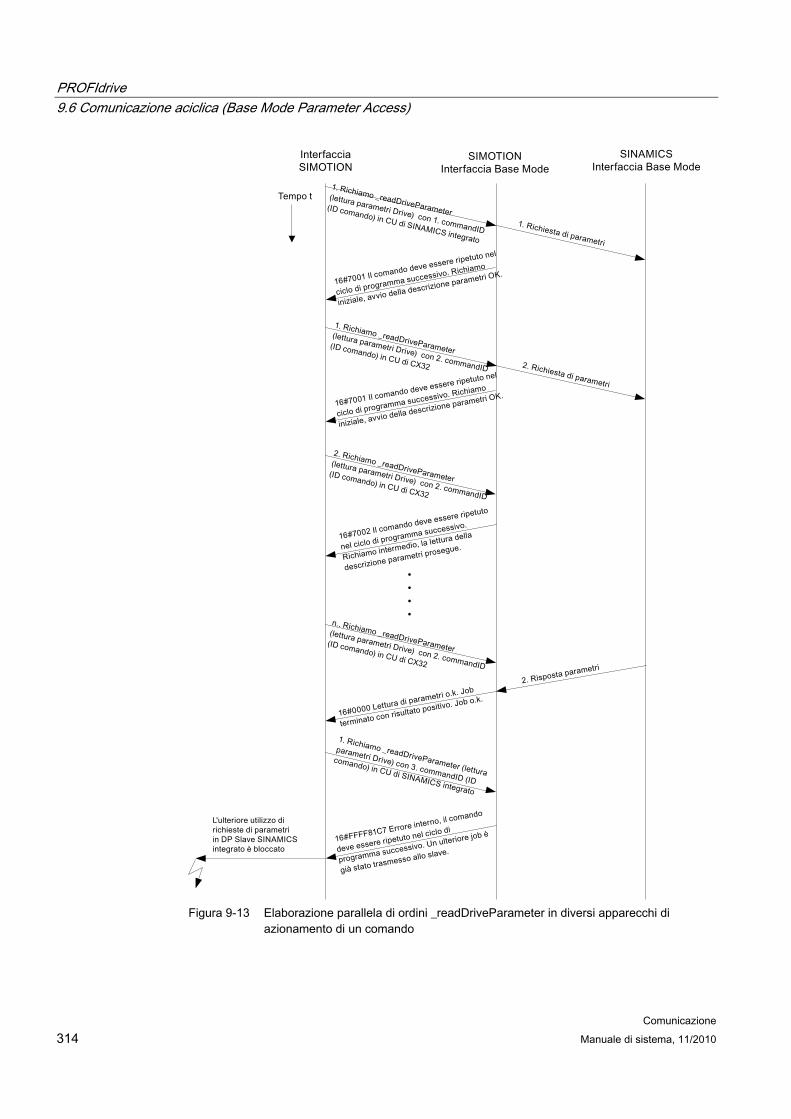
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 314 Manuale di sistema, 11/2010
Figura 9-13 Elaborazione parallela di ordini _readDriveParameter in diversi apparecchi di
azionamento di un comando
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 315
9.6.10 Particolarità
9.6.10.1 Regola 12 - Buffer dei dati di max. 64 oggetti di azionamento
SIMOTION esegue il buffer dei dati di max. 64 oggetti di azionamento Il primo richiamo delle funzioni _write/_readDrive... dopo il riavvio del sistema dura notevolmente più a lungo dei richiami successivi dello stesso oggetto di azionamento.
● La prima volta il sistema deve creare informazioni interne di amministrazione, alle quali sia possibile accedere più rapidamente per i richiami successivi dello stesso oggetto di azionamento.
In SIMOTION possono essere memorizzati i dati di un massimo di 64 oggetti di azionamento, da impiegare con _write/_readDrive... La distinzione viene operata in base all'indirizzo I/O.
9.6.10.2 Regola 13 - Un utilizzo combinato delle funzioni di sistema è possibile
Per le funzioni di sistema _writeRecord/_readRecord e _writeDrive.../_readDrive... è possibile un utilizzo combinato
In linea di principio è possibile l'utilizzo combinato dei seguenti comandi di sistema:
● Comandi di sistema SIMOTION _writeRecord/_readRecord
● Comandi di sistema SIMOTION _writeDrive.../_readDrive...
Nota
L'importante è comunque avere ben chiaro che, in mancanza di blocco dei comandi di sistema, da entrambi i gruppi di comandi possono essere attivati più ordini in un azionamento PROFIdrive (vedere paragrafo seguente), che tale azionamento non è però in grado di elaborare. Il blocco di _write/_readDrive... interno al sistema viene così "aggirato".
La figura Utilizzo combinato di _readDrive... e _read/_writeRecord mostra che le funzioni _write/_readRecord possono essere impiegate per lo stesso apparecchio di destinazione in particolare se, a causa di un ordine _readDriveParameter ancora in esecuzione, con lo stesso comando del sistema vengono integrati ulteriori ordini – il blocco deve essere impostato dall'utente, poiché un azionamento PROFIdrive non è in grado di elaborare questo aspetto.
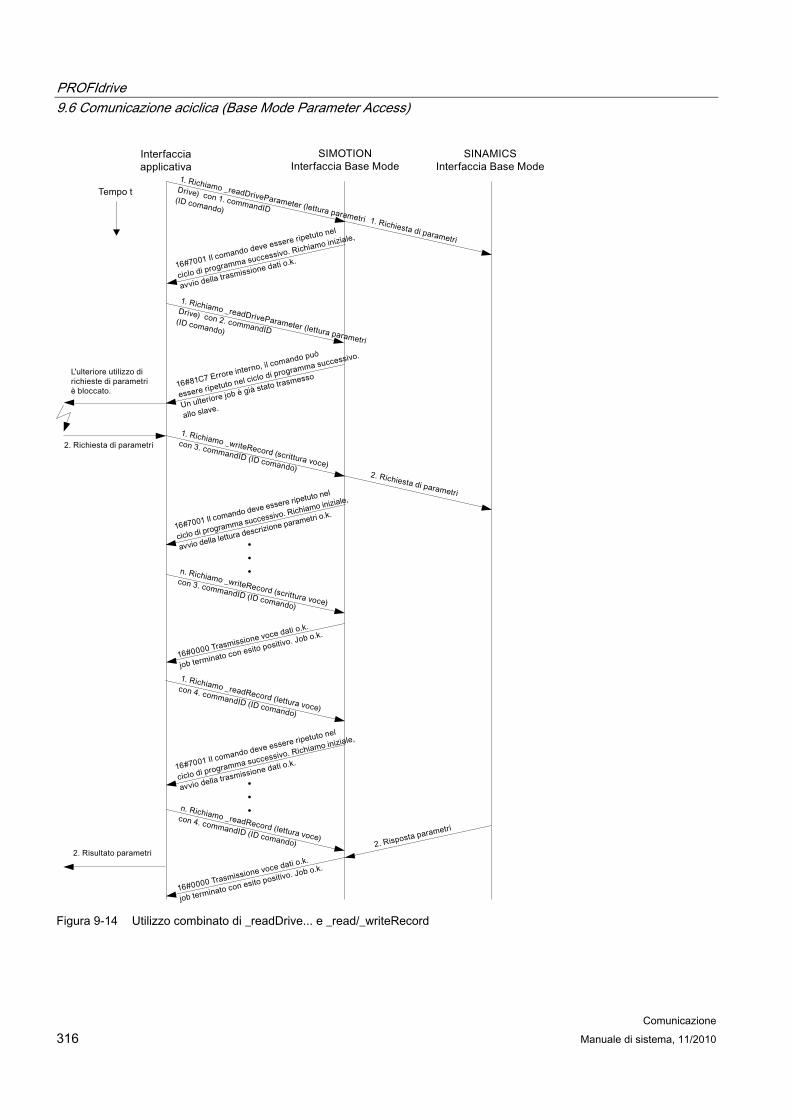
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 316 Manuale di sistema, 11/2010
Figura 9-14 Utilizzo combinato di _readDrive... e _read/_writeRecord
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 317
9.6.10.3 Regola 14 - Blocco in caso di utilizzo combinato dei comandi
In caso di utilizzo combinato dei comandi di entrambi i gruppi il blocco deve essere impostato dall'utente
In caso di utilizzo combinato dei seguenti comandi di sistema può accadere che in un apparecchio vengano attivati contemporaneamente più processi "Lettura/scrittura set di dati", in quanto in SIMOTION il blocco o la bufferizzazione avviene solo all'interno dei gruppi di comando, non tra gli stessi.
● Comandi di sistema SIMOTION _writeRecord/_readRecord
e
● Comandi di sistema SIMOTION _writeDrive.../_readDrive...
Il blocco deve essere ev. impostato dall'utente per impedire perdita di dati/incroci, poiché un azionamento PROFIdrive in base al profilo PROFIdrive non esegue alcun pipelining ed è quindi in grado di elaborare un solo ordine alla volta.
9.6.11 Esempi di programmi
9.6.11.1 Esempio di programma
Descrizione L'esempio seguente mostra in che modo si possono amministrare i comandi di sistema _writeRecord o _readRecord per leggere il codice di guasto del parametro p0945 di un azionamento SINAMICS (oggetto di azionamento DO3, indirizzo I/O 256).
Esempio Il programma di esempio può essere richiamato ad es. in BackgroundTask, poiché si utilizza la cosiddetta "programmazione asincrona".
//========================================================================= // demonstrate reading parameter 945 (fault code) via data set 47 // using SIMOTION system functions _write/_readRecord (asynchronous call) // INPUT address 256 is assumed to address the SINAMICS // drive is DO3 in SINAMICS S120 //========================================================================= INTERFACE PROGRAM record; // declare request type TYPE // declare struct of header request Header_Type_Request : STRUCT Request_Reference : USINT;
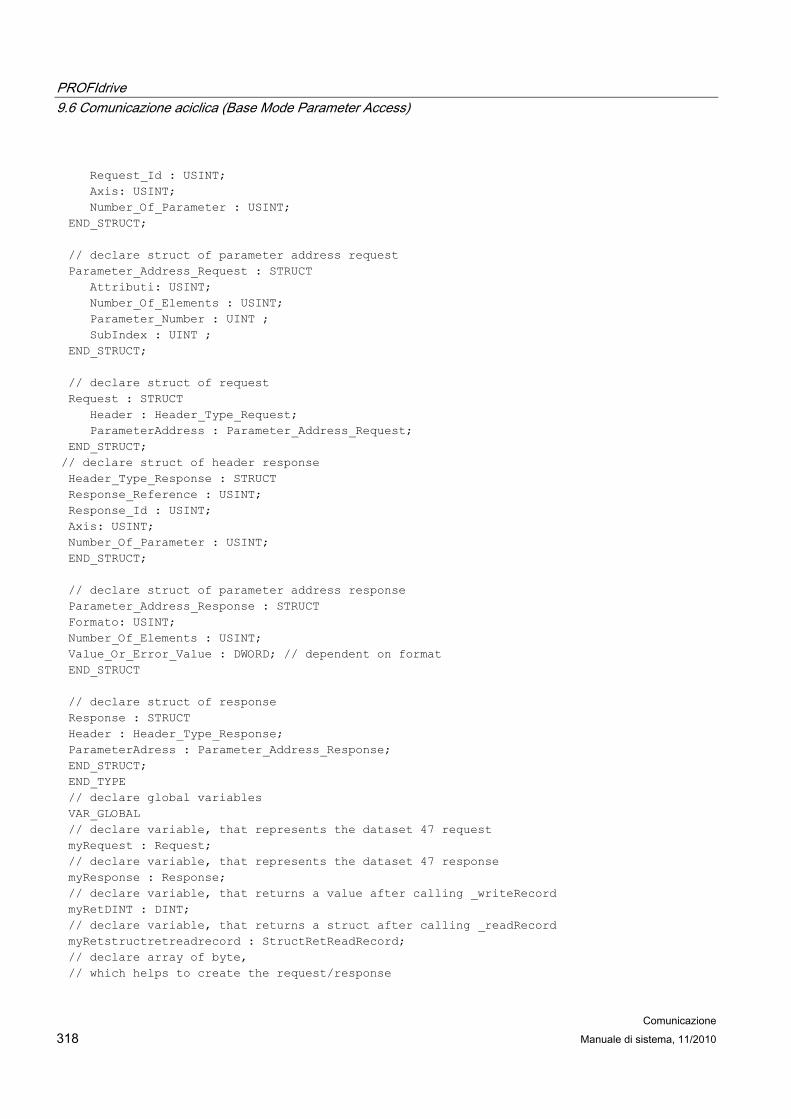
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 318 Manuale di sistema, 11/2010
Request_Id : USINT; Axis: USINT; Number_Of_Parameter : USINT; END_STRUCT; // declare struct of parameter address request Parameter_Address_Request : STRUCT Attributi: USINT; Number_Of_Elements : USINT; Parameter_Number : UINT ; SubIndex : UINT ; END_STRUCT; // declare struct of request Request : STRUCT Header : Header_Type_Request; ParameterAddress : Parameter_Address_Request; END_STRUCT; // declare struct of header response Header_Type_Response : STRUCT Response_Reference : USINT; Response_Id : USINT; Axis: USINT; Number_Of_Parameter : USINT; END_STRUCT; // declare struct of parameter address response Parameter_Address_Response : STRUCT Formato: USINT; Number_Of_Elements : USINT; Value_Or_Error_Value : DWORD; // dependent on format END_STRUCT // declare struct of response Response : STRUCT Header : Header_Type_Response; ParameterAdress : Parameter_Address_Response; END_STRUCT; END_TYPE // declare global variables VAR_GLOBAL // declare variable, that represents the dataset 47 request myRequest : Request; // declare variable, that represents the dataset 47 response myResponse : Response; // declare variable, that returns a value after calling _writeRecord myRetDINT : DINT; // declare variable, that returns a struct after calling _readRecord myRetstructretreadrecord : StructRetReadRecord; // declare array of byte, // which helps to create the request/response
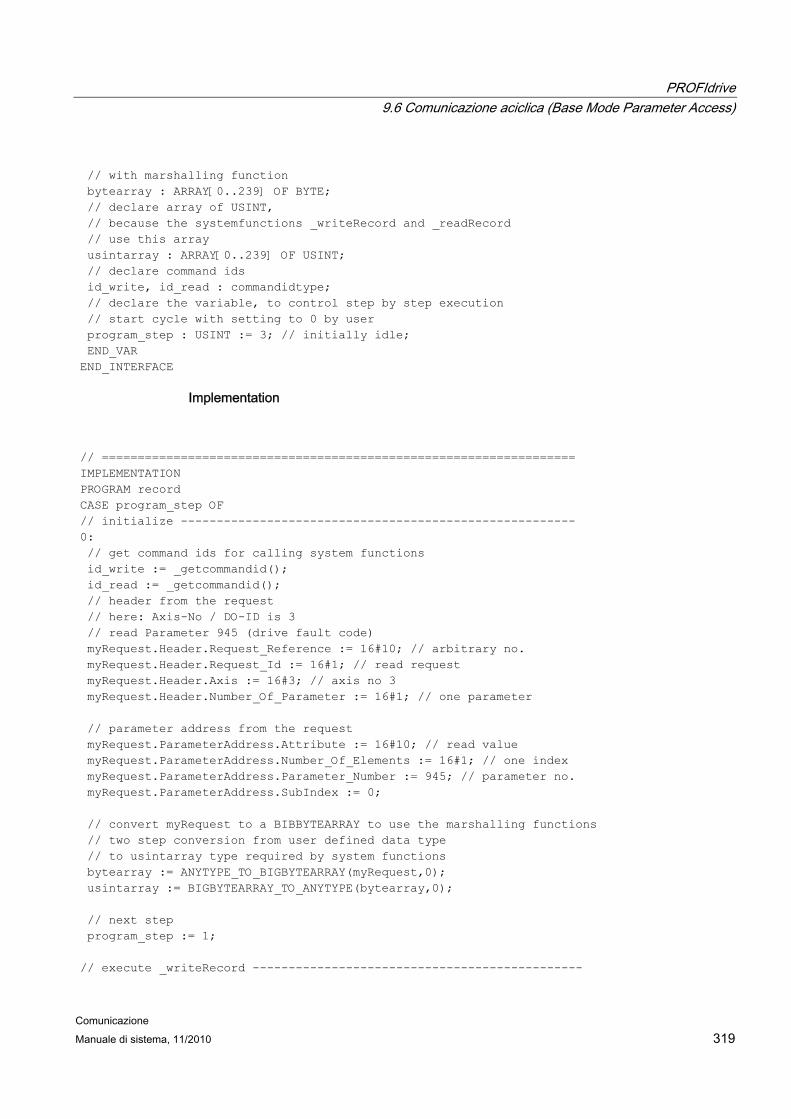
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione Manuale di sistema, 11/2010 319
// with marshalling function bytearray : ARRAY[0..239] OF BYTE; // declare array of USINT, // because the systemfunctions _writeRecord and _readRecord // use this array usintarray : ARRAY[0..239] OF USINT; // declare command ids id_write, id_read : commandidtype; // declare the variable, to control step by step execution // start cycle with setting to 0 by user program_step : USINT := 3; // initially idle; END_VAR END_INTERFACE
Implementation
// ================================================================== IMPLEMENTATION PROGRAM record CASE program_step OF // initialize ------------------------------------------------------- 0: // get command ids for calling system functions id_write := _getcommandid(); id_read := _getcommandid(); // header from the request // here: Axis-No / DO-ID is 3 // read Parameter 945 (drive fault code) myRequest.Header.Request_Reference := 16#10; // arbitrary no. myRequest.Header.Request_Id := 16#1; // read request myRequest.Header.Axis := 16#3; // axis no 3 myRequest.Header.Number_Of_Parameter := 16#1; // one parameter // parameter address from the request myRequest.ParameterAddress.Attribute := 16#10; // read value myRequest.ParameterAddress.Number_Of_Elements := 16#1; // one index myRequest.ParameterAddress.Parameter_Number := 945; // parameter no. myRequest.ParameterAddress.SubIndex := 0; // convert myRequest to a BIBBYTEARRAY to use the marshalling functions // two step conversion from user defined data type // to usintarray type required by system functions bytearray := ANYTYPE_TO_BIGBYTEARRAY(myRequest,0); usintarray := BIGBYTEARRAY_TO_ANYTYPE(bytearray,0); // next step program_step := 1; // execute _writeRecord ----------------------------------------------
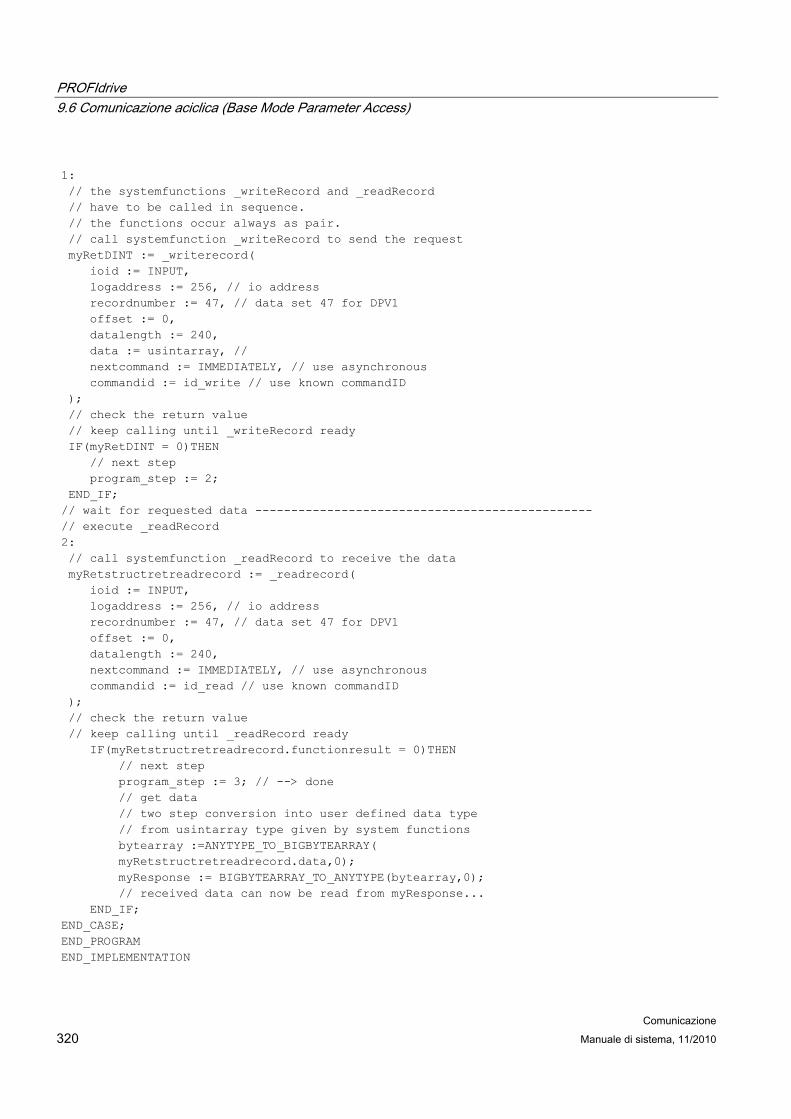
PROFIdrive 9.6 Comunicazione aciclica (Base Mode Parameter Access)
Comunicazione 320 Manuale di sistema, 11/2010
1: // the systemfunctions _writeRecord and _readRecord // have to be called in sequence. // the functions occur always as pair. // call systemfunction _writeRecord to send the request myRetDINT := _writerecord( ioid := INPUT, logaddress := 256, // io address recordnumber := 47, // data set 47 for DPV1 offset := 0, datalength := 240, data := usintarray, // nextcommand := IMMEDIATELY, // use asynchronous commandid := id_write // use known commandID ); // check the return value // keep calling until _writeRecord ready IF(myRetDINT = 0)THEN // next step program_step := 2; END_IF; // wait for requested data ----------------------------------------------- // execute _readRecord 2: // call systemfunction _readRecord to receive the data myRetstructretreadrecord := _readrecord( ioid := INPUT, logaddress := 256, // io address recordnumber := 47, // data set 47 for DPV1 offset := 0, datalength := 240, nextcommand := IMMEDIATELY, // use asynchronous commandid := id_read // use known commandID ); // check the return value // keep calling until _readRecord ready IF(myRetstructretreadrecord.functionresult = 0)THEN // next step program_step := 3; // --> done // get data // two step conversion into user defined data type // from usintarray type given by system functions bytearray :=ANYTYPE_TO_BIGBYTEARRAY( myRetstructretreadrecord.data,0); myResponse := BIGBYTEARRAY_TO_ANYTYPE(bytearray,0); // received data can now be read from myResponse... END_IF; END_CASE; END_PROGRAM END_IMPLEMENTATION
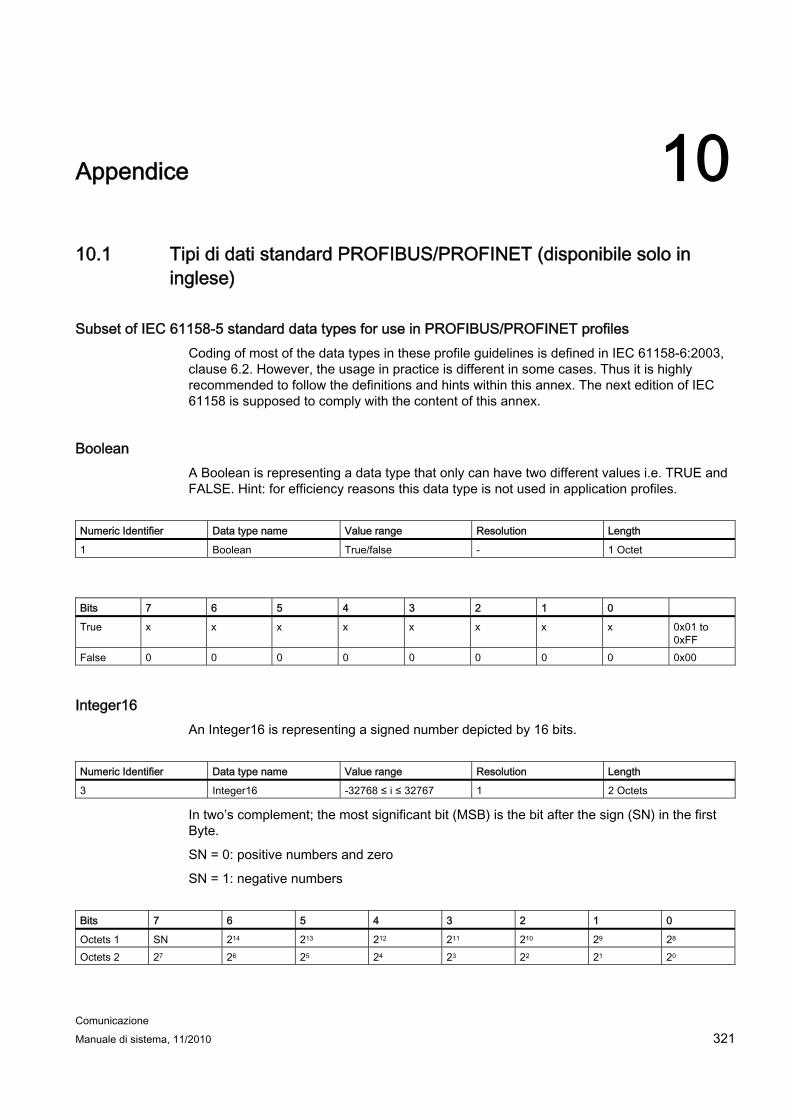
Comunicazione Manuale di sistema, 11/2010 321
Appendice 1010.1 Tipi di dati standard PROFIBUS/PROFINET (disponibile solo in
inglese)
Subset of IEC 61158-5 standard data types for use in PROFIBUS/PROFINET profiles Coding of most of the data types in these profile guidelines is defined in IEC 61158-6:2003, clause 6.2. However, the usage in practice is different in some cases. Thus it is highly recommended to follow the definitions and hints within this annex. The next edition of IEC 61158 is supposed to comply with the content of this annex.
Boolean A Boolean is representing a data type that only can have two different values i.e. TRUE and FALSE. Hint: for efficiency reasons this data type is not used in application profiles.
Numeric Identifier Data type name Value range Resolution Length
1 Boolean True/false - 1 Octet
Bits 7 6 5 4 3 2 1 0
True x x x x x x x x 0x01 to 0xFF
False 0 0 0 0 0 0 0 0 0x00
Integer16 An Integer16 is representing a signed number depicted by 16 bits.
Numeric Identifier Data type name Value range Resolution Length
3 Integer16 -32768 ≤ i ≤ 32767 1 2 Octets
In two’s complement; the most significant bit (MSB) is the bit after the sign (SN) in the first Byte.
SN = 0: positive numbers and zero
SN = 1: negative numbers
Bits 7 6 5 4 3 2 1 0
Octets 1 SN 214 213 212 211 210 29 28 Octets 2 27 26 25 24 23 22 21 20
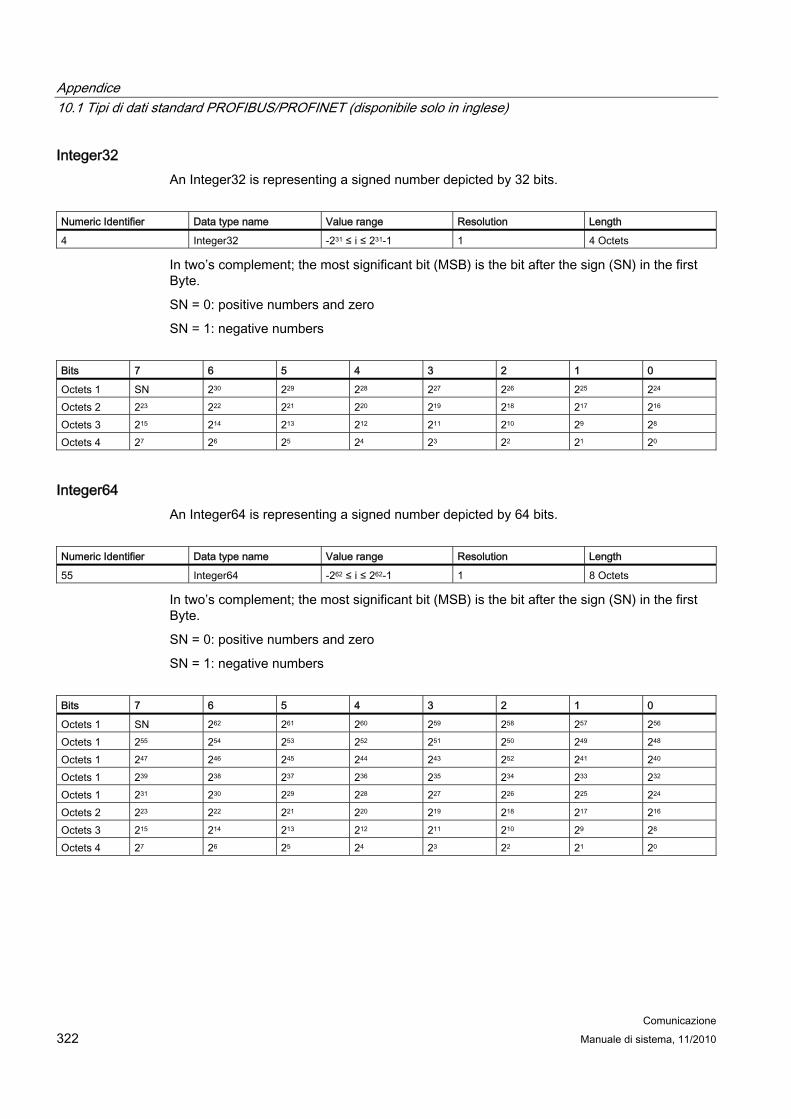
Appendice 10.1 Tipi di dati standard PROFIBUS/PROFINET (disponibile solo in inglese)
Comunicazione 322 Manuale di sistema, 11/2010
Integer32 An Integer32 is representing a signed number depicted by 32 bits.
Numeric Identifier Data type name Value range Resolution Length
4 Integer32 -231 ≤ i ≤ 231-1 1 4 Octets
In two’s complement; the most significant bit (MSB) is the bit after the sign (SN) in the first Byte.
SN = 0: positive numbers and zero
SN = 1: negative numbers
Bits 7 6 5 4 3 2 1 0
Octets 1 SN 230 229 228 227 226 225 224 Octets 2 223 222 221 220 219 218 217 216 Octets 3 215 214 213 212 211 210 29 28 Octets 4 27 26 25 24 23 22 21 20
Integer64 An Integer64 is representing a signed number depicted by 64 bits.
Numeric Identifier Data type name Value range Resolution Length
55 Integer64 -262 ≤ i ≤ 262-1 1 8 Octets
In two’s complement; the most significant bit (MSB) is the bit after the sign (SN) in the first Byte.
SN = 0: positive numbers and zero
SN = 1: negative numbers
Bits 7 6 5 4 3 2 1 0
Octets 1 SN 262 261 260 259 258 257 256 Octets 1 255 254 253 252 251 250 249 248 Octets 1 247 246 245 244 243 252 241 240 Octets 1 239 238 237 236 235 234 233 232 Octets 1 231 230 229 228 227 226 225 224 Octets 2 223 222 221 220 219 218 217 216 Octets 3 215 214 213 212 211 210 29 28 Octets 4 27 26 25 24 23 22 21 20
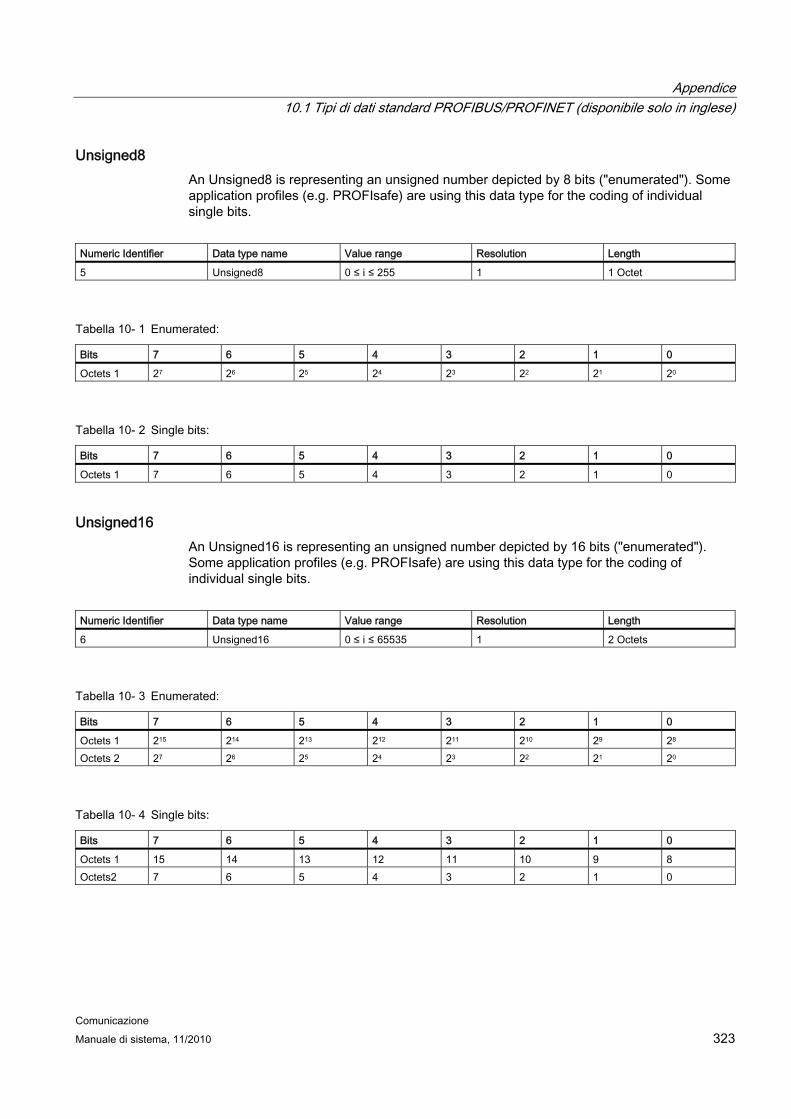
Appendice 10.1 Tipi di dati standard PROFIBUS/PROFINET (disponibile solo in inglese)
Comunicazione Manuale di sistema, 11/2010 323
Unsigned8 An Unsigned8 is representing an unsigned number depicted by 8 bits ("enumerated"). Some application profiles (e.g. PROFIsafe) are using this data type for the coding of individual single bits.
Numeric Identifier Data type name Value range Resolution Length
5 Unsigned8 0 ≤ i ≤ 255 1 1 Octet
Tabella 10- 1 Enumerated:
Bits 7 6 5 4 3 2 1 0
Octets 1 27 26 25 24 23 22 21 20
Tabella 10- 2 Single bits:
Bits 7 6 5 4 3 2 1 0
Octets 1 7 6 5 4 3 2 1 0
Unsigned16 An Unsigned16 is representing an unsigned number depicted by 16 bits ("enumerated"). Some application profiles (e.g. PROFIsafe) are using this data type for the coding of individual single bits.
Numeric Identifier Data type name Value range Resolution Length
6 Unsigned16 0 ≤ i ≤ 65535 1 2 Octets
Tabella 10- 3 Enumerated:
Bits 7 6 5 4 3 2 1 0
Octets 1 215 214 213 212 211 210 29 28 Octets 2 27 26 25 24 23 22 21 20
Tabella 10- 4 Single bits:
Bits 7 6 5 4 3 2 1 0
Octets 1 15 14 13 12 11 10 9 8 Octets2 7 6 5 4 3 2 1 0
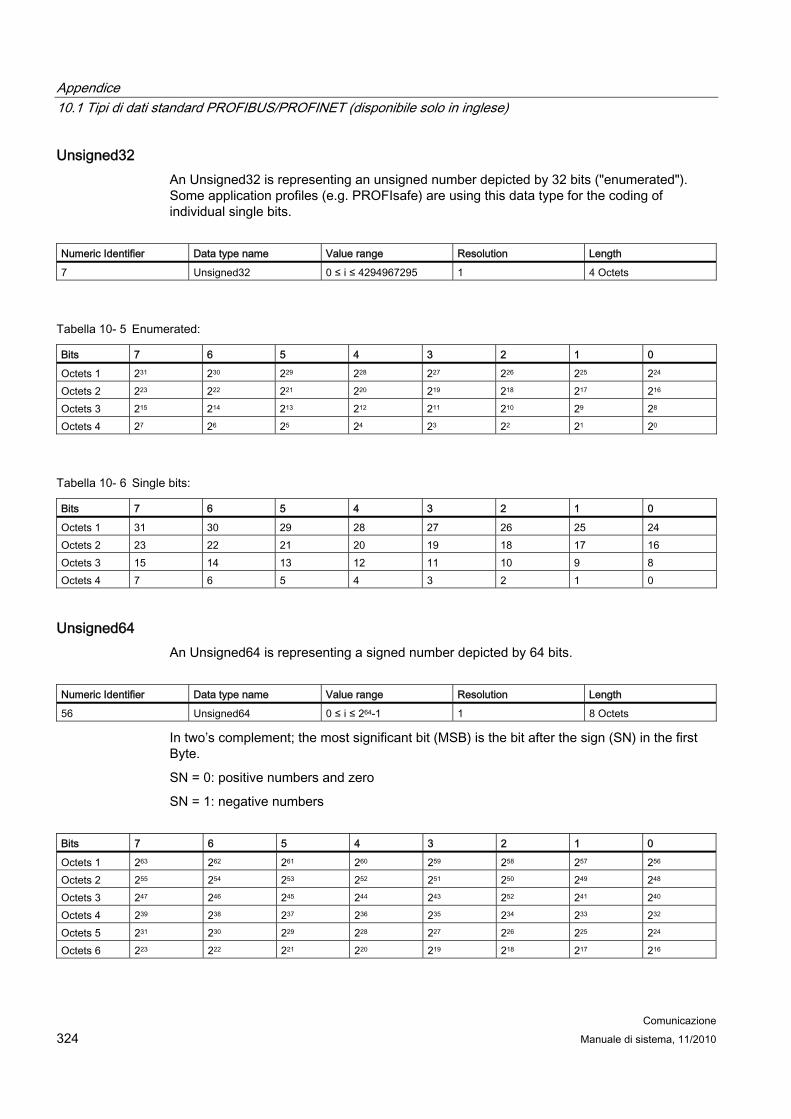
Appendice 10.1 Tipi di dati standard PROFIBUS/PROFINET (disponibile solo in inglese)
Comunicazione 324 Manuale di sistema, 11/2010
Unsigned32 An Unsigned32 is representing an unsigned number depicted by 32 bits ("enumerated"). Some application profiles (e.g. PROFIsafe) are using this data type for the coding of individual single bits.
Numeric Identifier Data type name Value range Resolution Length
7 Unsigned32 0 ≤ i ≤ 4294967295 1 4 Octets
Tabella 10- 5 Enumerated:
Bits 7 6 5 4 3 2 1 0
Octets 1 231 230 229 228 227 226 225 224 Octets 2 223 222 221 220 219 218 217 216 Octets 3 215 214 213 212 211 210 29 28 Octets 4 27 26 25 24 23 22 21 20
Tabella 10- 6 Single bits:
Bits 7 6 5 4 3 2 1 0
Octets 1 31 30 29 28 27 26 25 24 Octets 2 23 22 21 20 19 18 17 16 Octets 3 15 14 13 12 11 10 9 8 Octets 4 7 6 5 4 3 2 1 0
Unsigned64 An Unsigned64 is representing a signed number depicted by 64 bits.
Numeric Identifier Data type name Value range Resolution Length
56 Unsigned64 0 ≤ i ≤ 264-1 1 8 Octets
In two’s complement; the most significant bit (MSB) is the bit after the sign (SN) in the first Byte.
SN = 0: positive numbers and zero
SN = 1: negative numbers
Bits 7 6 5 4 3 2 1 0
Octets 1 263 262 261 260 259 258 257 256 Octets 2 255 254 253 252 251 250 249 248 Octets 3 247 246 245 244 243 252 241 240 Octets 4 239 238 237 236 235 234 233 232 Octets 5 231 230 229 228 227 226 225 224 Octets 6 223 222 221 220 219 218 217 216
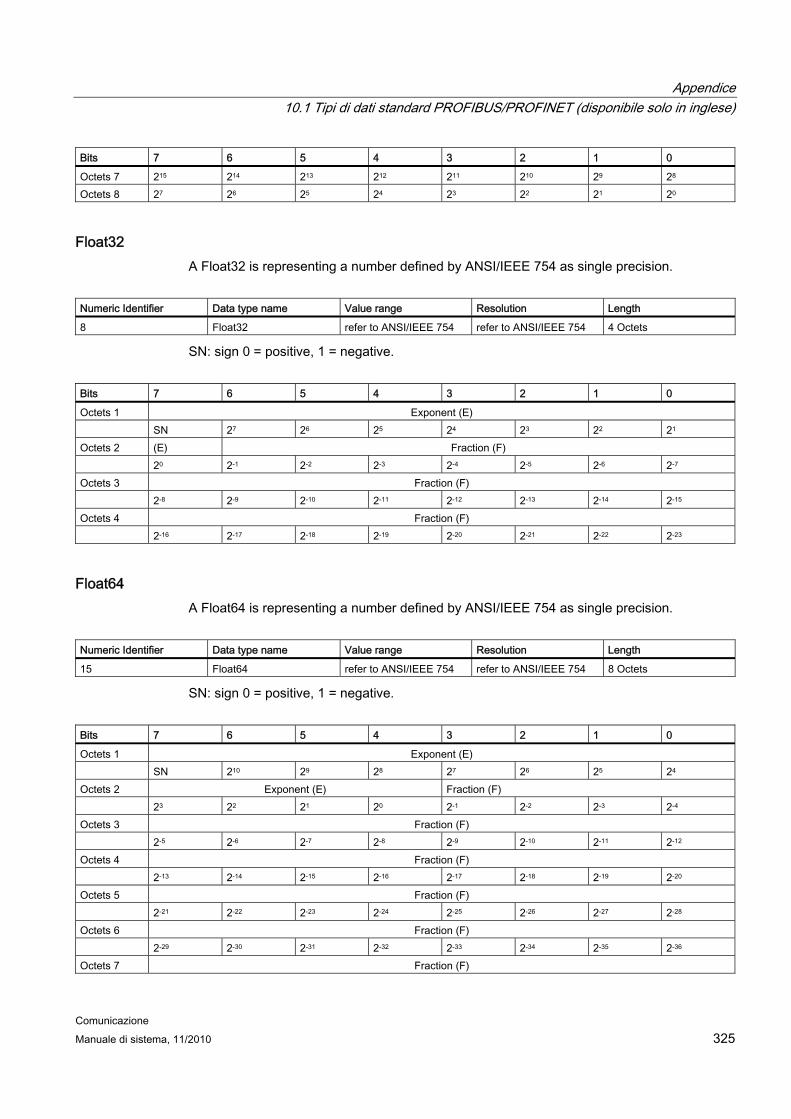
Appendice 10.1 Tipi di dati standard PROFIBUS/PROFINET (disponibile solo in inglese)
Comunicazione Manuale di sistema, 11/2010 325
Bits 7 6 5 4 3 2 1 0
Octets 7 215 214 213 212 211 210 29 28 Octets 8 27 26 25 24 23 22 21 20
Float32 A Float32 is representing a number defined by ANSI/IEEE 754 as single precision.
Numeric Identifier Data type name Value range Resolution Length
8 Float32 refer to ANSI/IEEE 754 refer to ANSI/IEEE 754 4 Octets
SN: sign 0 = positive, 1 = negative.
Bits 7 6 5 4 3 2 1 0
Octets 1 Exponent (E) SN 27 26 25 24 23 22 21 Octets 2 (E) Fraction (F) 20 2-1 2-2 2-3 2-4 2-5 2-6 2-7 Octets 3 Fraction (F) 2-8 2-9 2-10 2-11 2-12 2-13 2-14 2-15 Octets 4 Fraction (F) 2-16 2-17 2-18 2-19 2-20 2-21 2-22 2-23
Float64 A Float64 is representing a number defined by ANSI/IEEE 754 as single precision.
Numeric Identifier Data type name Value range Resolution Length
15 Float64 refer to ANSI/IEEE 754 refer to ANSI/IEEE 754 8 Octets
SN: sign 0 = positive, 1 = negative.
Bits 7 6 5 4 3 2 1 0
Octets 1 Exponent (E) SN 210 29 28 27 26 25 24 Octets 2 Exponent (E) Fraction (F) 23 22 21 20 2-1 2-2 2-3 2-4 Octets 3 Fraction (F) 2-5 2-6 2-7 2-8 2-9 2-10 2-11 2-12 Octets 4 Fraction (F) 2-13 2-14 2-15 2-16 2-17 2-18 2-19 2-20 Octets 5 Fraction (F) 2-21 2-22 2-23 2-24 2-25 2-26 2-27 2-28 Octets 6 Fraction (F) 2-29 2-30 2-31 2-32 2-33 2-34 2-35 2-36 Octets 7 Fraction (F)
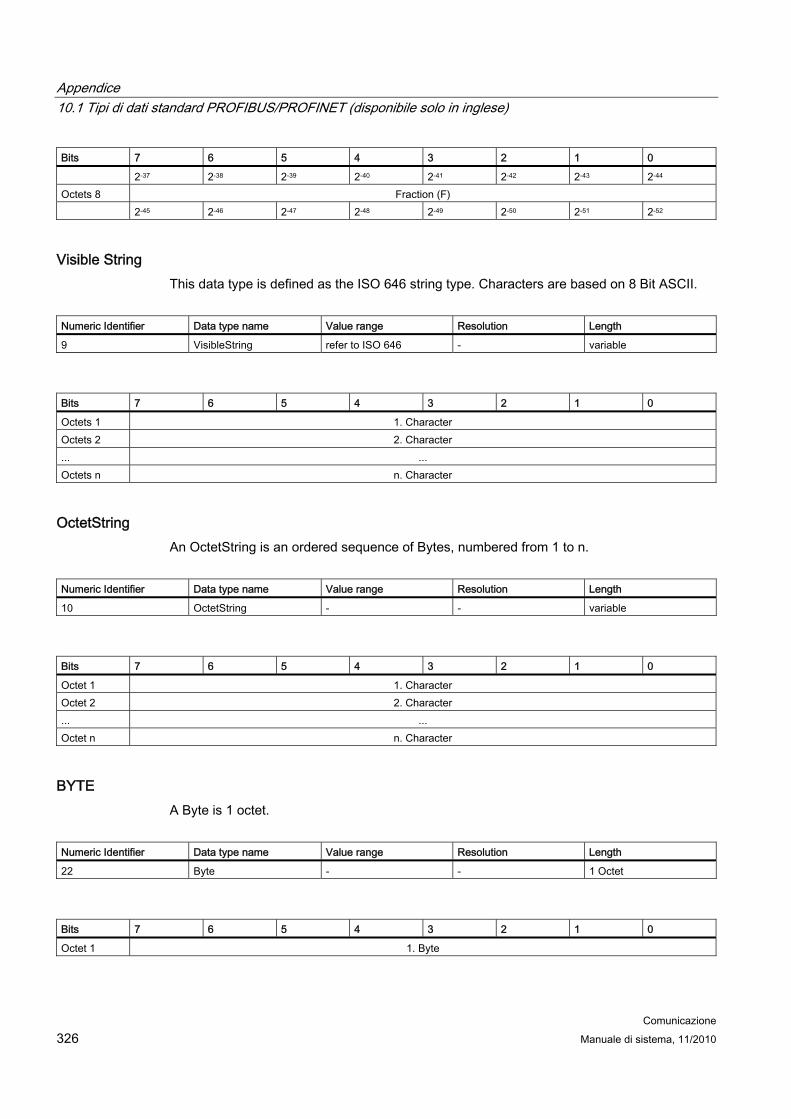
Appendice 10.1 Tipi di dati standard PROFIBUS/PROFINET (disponibile solo in inglese)
Comunicazione 326 Manuale di sistema, 11/2010
Bits 7 6 5 4 3 2 1 0
2-37 2-38 2-39 2-40 2-41 2-42 2-43 2-44 Octets 8 Fraction (F) 2-45 2-46 2-47 2-48 2-49 2-50 2-51 2-52
Visible String This data type is defined as the ISO 646 string type. Characters are based on 8 Bit ASCII.
Numeric Identifier Data type name Value range Resolution Length
9 VisibleString refer to ISO 646 - variable
Bits 7 6 5 4 3 2 1 0
Octets 1 1. Character Octets 2 2. Character ... ... Octets n n. Character
OctetString An OctetString is an ordered sequence of Bytes, numbered from 1 to n.
Numeric Identifier Data type name Value range Resolution Length
10 OctetString - - variable
Bits 7 6 5 4 3 2 1 0
Octet 1 1. Character Octet 2 2. Character ... ... Octet n n. Character
BYTE A Byte is 1 octet.
Numeric Identifier Data type name Value range Resolution Length
22 Byte - - 1 Octet
Bits 7 6 5 4 3 2 1 0
Octet 1 1. Byte
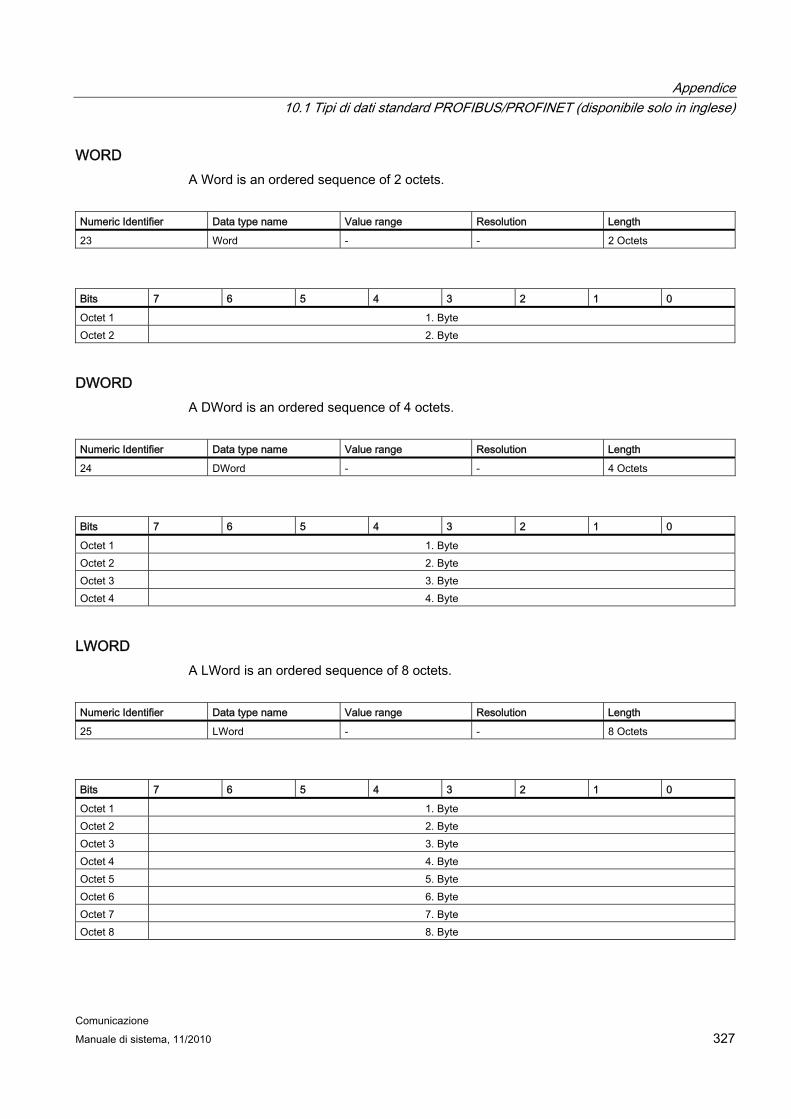
Appendice 10.1 Tipi di dati standard PROFIBUS/PROFINET (disponibile solo in inglese)
Comunicazione Manuale di sistema, 11/2010 327
WORD A Word is an ordered sequence of 2 octets.
Numeric Identifier Data type name Value range Resolution Length
23 Word - - 2 Octets
Bits 7 6 5 4 3 2 1 0
Octet 1 1. Byte Octet 2 2. Byte
DWORD A DWord is an ordered sequence of 4 octets.
Numeric Identifier Data type name Value range Resolution Length
24 DWord - - 4 Octets
Bits 7 6 5 4 3 2 1 0
Octet 1 1. Byte Octet 2 2. Byte Octet 3 3. Byte Octet 4 4. Byte
LWORD A LWord is an ordered sequence of 8 octets.
Numeric Identifier Data type name Value range Resolution Length
25 LWord - - 8 Octets
Bits 7 6 5 4 3 2 1 0
Octet 1 1. Byte Octet 2 2. Byte Octet 3 3. Byte Octet 4 4. Byte Octet 5 5. Byte Octet 6 6. Byte Octet 7 7. Byte Octet 8 8. Byte
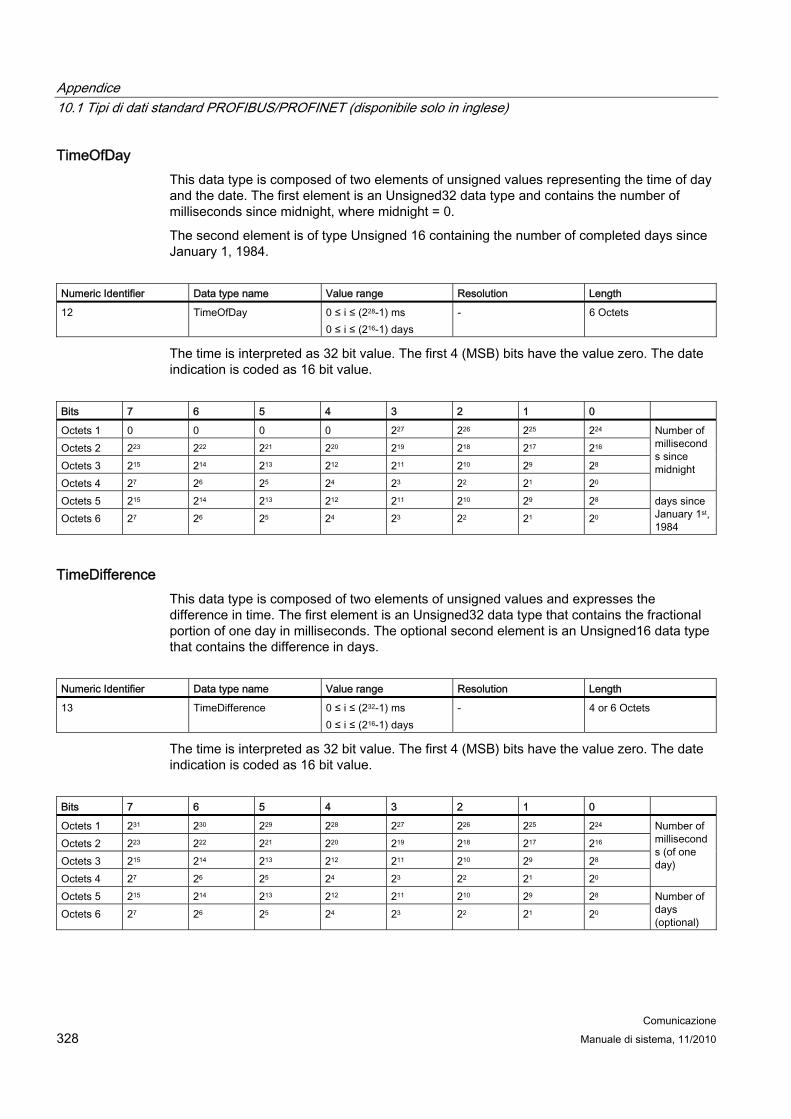
Appendice 10.1 Tipi di dati standard PROFIBUS/PROFINET (disponibile solo in inglese)
Comunicazione 328 Manuale di sistema, 11/2010
TimeOfDay This data type is composed of two elements of unsigned values representing the time of day and the date. The first element is an Unsigned32 data type and contains the number of milliseconds since midnight, where midnight = 0.
The second element is of type Unsigned 16 containing the number of completed days since January 1, 1984.
Numeric Identifier Data type name Value range Resolution Length
12 TimeOfDay 0 ≤ i ≤ (228-1) ms 0 ≤ i ≤ (216-1) days
- 6 Octets
The time is interpreted as 32 bit value. The first 4 (MSB) bits have the value zero. The date indication is coded as 16 bit value.
Bits 7 6 5 4 3 2 1 0
Octets 1 0 0 0 0 227 226 225 224 Octets 2 223 222 221 220 219 218 217 216 Octets 3 215 214 213 212 211 210 29 28 Octets 4 27 26 25 24 23 22 21 20
Number of milliseconds since midnight
Octets 5 215 214 213 212 211 210 29 28 Octets 6 27 26 25 24 23 22 21 20
days since January 1st, 1984
TimeDifference This data type is composed of two elements of unsigned values and expresses the difference in time. The first element is an Unsigned32 data type that contains the fractional portion of one day in milliseconds. The optional second element is an Unsigned16 data type that contains the difference in days.
Numeric Identifier Data type name Value range Resolution Length
13 TimeDifference 0 ≤ i ≤ (232-1) ms 0 ≤ i ≤ (216-1) days
- 4 or 6 Octets
The time is interpreted as 32 bit value. The first 4 (MSB) bits have the value zero. The date indication is coded as 16 bit value.
Bits 7 6 5 4 3 2 1 0
Octets 1 231 230 229 228 227 226 225 224 Octets 2 223 222 221 220 219 218 217 216 Octets 3 215 214 213 212 211 210 29 28 Octets 4 27 26 25 24 23 22 21 20
Number of milliseconds (of one day)
Octets 5 215 214 213 212 211 210 29 28 Octets 6 27 26 25 24 23 22 21 20
Number of days (optional)
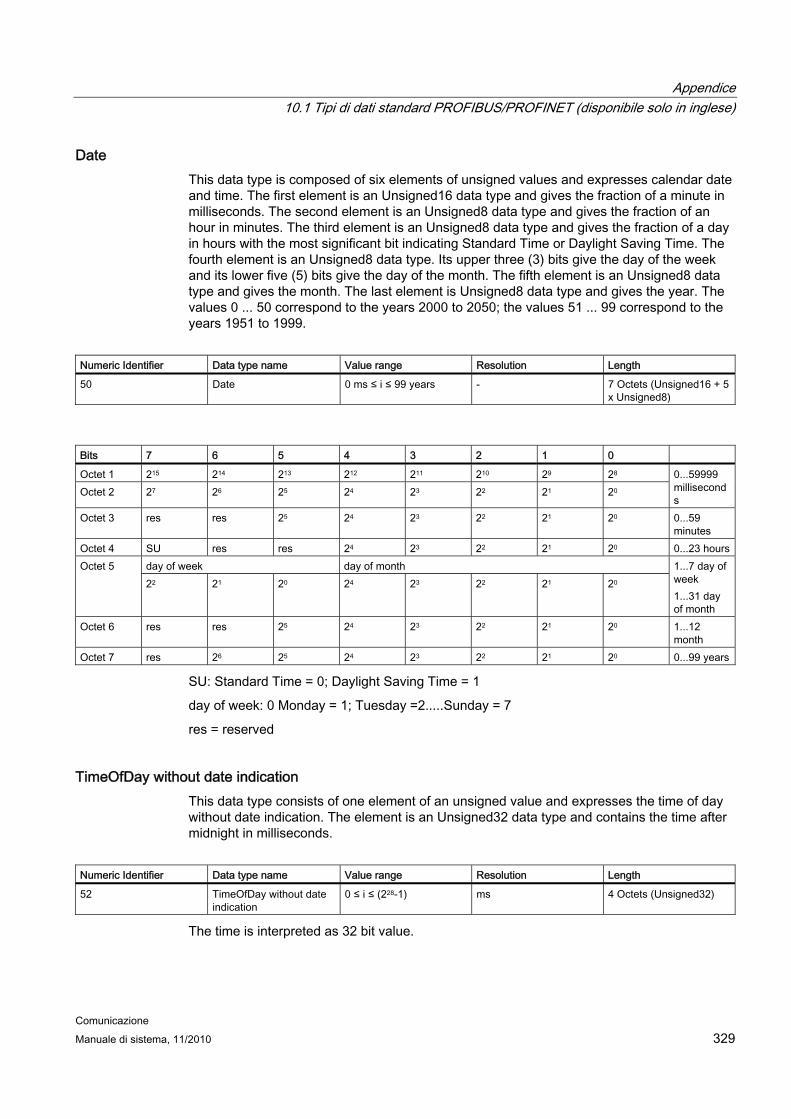
Appendice 10.1 Tipi di dati standard PROFIBUS/PROFINET (disponibile solo in inglese)
Comunicazione Manuale di sistema, 11/2010 329
Date This data type is composed of six elements of unsigned values and expresses calendar date and time. The first element is an Unsigned16 data type and gives the fraction of a minute in milliseconds. The second element is an Unsigned8 data type and gives the fraction of an hour in minutes. The third element is an Unsigned8 data type and gives the fraction of a day in hours with the most significant bit indicating Standard Time or Daylight Saving Time. The fourth element is an Unsigned8 data type. Its upper three (3) bits give the day of the week and its lower five (5) bits give the day of the month. The fifth element is an Unsigned8 data type and gives the month. The last element is Unsigned8 data type and gives the year. The values 0 ... 50 correspond to the years 2000 to 2050; the values 51 ... 99 correspond to the years 1951 to 1999.
Numeric Identifier Data type name Value range Resolution Length
50 Date 0 ms ≤ i ≤ 99 years - 7 Octets (Unsigned16 + 5 x Unsigned8)
Bits 7 6 5 4 3 2 1 0
Octet 1 215 214 213 212 211 210 29 28 Octet 2 27 26 25 24 23 22 21 20
0...59999 milliseconds
Octet 3 res res 25 24 23 22 21 20 0...59 minutes
Octet 4 SU res res 24 23 22 21 20 0...23 hoursday of week day of month Octet 5 22 21 20 24 23 22 21 20
1...7 day of week 1...31 day of month
Octet 6 res res 25 24 23 22 21 20 1...12 month
Octet 7 res 26 25 24 23 22 21 20 0...99 years
SU: Standard Time = 0; Daylight Saving Time = 1
day of week: 0 Monday = 1; Tuesday =2.....Sunday = 7
res = reserved
TimeOfDay without date indication This data type consists of one element of an unsigned value and expresses the time of day without date indication. The element is an Unsigned32 data type and contains the time after midnight in milliseconds.
Numeric Identifier Data type name Value range Resolution Length
52 TimeOfDay without date indication
0 ≤ i ≤ (228-1) ms 4 Octets (Unsigned32)
The time is interpreted as 32 bit value.
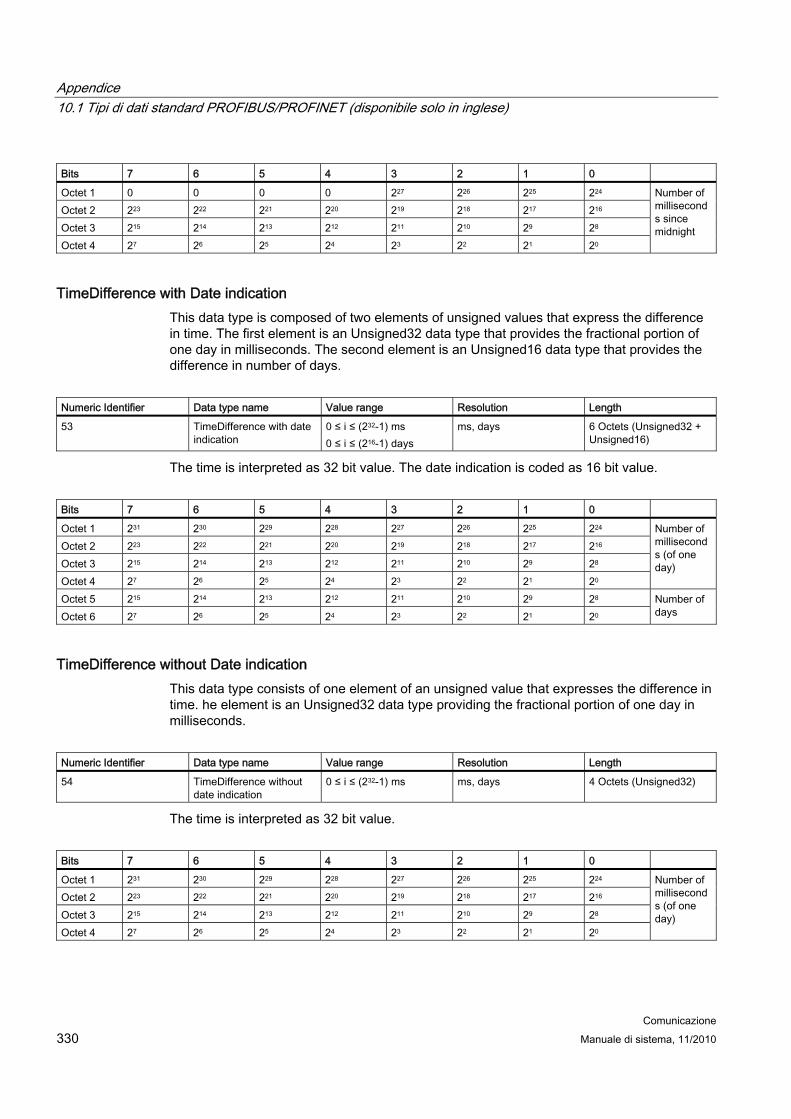
Appendice 10.1 Tipi di dati standard PROFIBUS/PROFINET (disponibile solo in inglese)
Comunicazione 330 Manuale di sistema, 11/2010
Bits 7 6 5 4 3 2 1 0
Octet 1 0 0 0 0 227 226 225 224 Octet 2 223 222 221 220 219 218 217 216 Octet 3 215 214 213 212 211 210 29 28 Octet 4 27 26 25 24 23 22 21 20
Number of milliseconds since midnight
TimeDifference with Date indication This data type is composed of two elements of unsigned values that express the difference in time. The first element is an Unsigned32 data type that provides the fractional portion of one day in milliseconds. The second element is an Unsigned16 data type that provides the difference in number of days.
Numeric Identifier Data type name Value range Resolution Length
53 TimeDifference with date indication
0 ≤ i ≤ (232-1) ms 0 ≤ i ≤ (216-1) days
ms, days 6 Octets (Unsigned32 + Unsigned16)
The time is interpreted as 32 bit value. The date indication is coded as 16 bit value.
Bits 7 6 5 4 3 2 1 0
Octet 1 231 230 229 228 227 226 225 224 Octet 2 223 222 221 220 219 218 217 216 Octet 3 215 214 213 212 211 210 29 28 Octet 4 27 26 25 24 23 22 21 20
Number of milliseconds (of one day)
Octet 5 215 214 213 212 211 210 29 28 Octet 6 27 26 25 24 23 22 21 20
Number of days
TimeDifference without Date indication This data type consists of one element of an unsigned value that expresses the difference in time. he element is an Unsigned32 data type providing the fractional portion of one day in milliseconds.
Numeric Identifier Data type name Value range Resolution Length
54 TimeDifference without date indication
0 ≤ i ≤ (232-1) ms ms, days 4 Octets (Unsigned32)
The time is interpreted as 32 bit value.
Bits 7 6 5 4 3 2 1 0
Octet 1 231 230 229 228 227 226 225 224 Octet 2 223 222 221 220 219 218 217 216 Octet 3 215 214 213 212 211 210 29 28 Octet 4 27 26 25 24 23 22 21 20
Number of milliseconds (of one day)
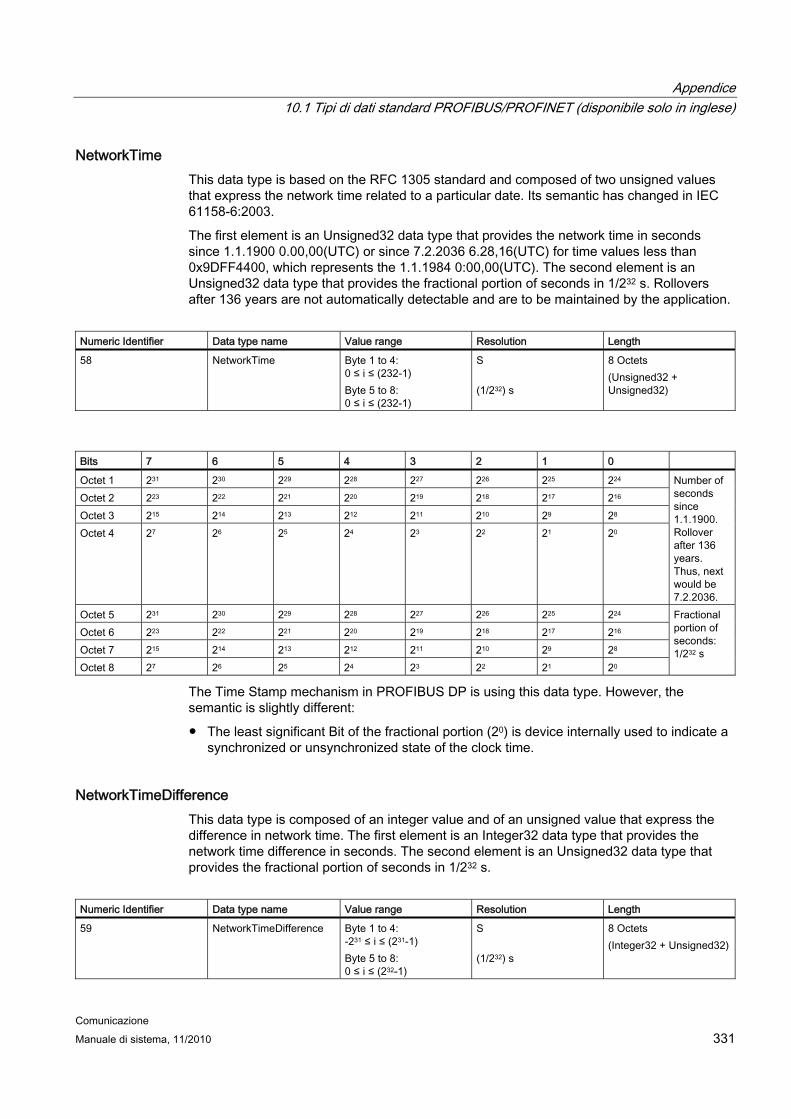
Appendice 10.1 Tipi di dati standard PROFIBUS/PROFINET (disponibile solo in inglese)
Comunicazione Manuale di sistema, 11/2010 331
NetworkTime This data type is based on the RFC 1305 standard and composed of two unsigned values that express the network time related to a particular date. Its semantic has changed in IEC 61158-6:2003.
The first element is an Unsigned32 data type that provides the network time in seconds since 1.1.1900 0.00,00(UTC) or since 7.2.2036 6.28,16(UTC) for time values less than 0x9DFF4400, which represents the 1.1.1984 0:00,00(UTC). The second element is an Unsigned32 data type that provides the fractional portion of seconds in 1/232 s. Rollovers after 136 years are not automatically detectable and are to be maintained by the application.
Numeric Identifier Data type name Value range Resolution Length
58 NetworkTime Byte 1 to 4: 0 ≤ i ≤ (232-1) Byte 5 to 8: 0 ≤ i ≤ (232-1)
S (1/232) s
8 Octets (Unsigned32 + Unsigned32)
Bits 7 6 5 4 3 2 1 0
Octet 1 231 230 229 228 227 226 225 224 Octet 2 223 222 221 220 219 218 217 216 Octet 3 215 214 213 212 211 210 29 28 Octet 4 27 26 25 24 23 22 21 20
Number of seconds since 1.1.1900. Rollover after 136 years. Thus, next would be 7.2.2036.
Octet 5 231 230 229 228 227 226 225 224 Octet 6 223 222 221 220 219 218 217 216 Octet 7 215 214 213 212 211 210 29 28 Octet 8 27 26 25 24 23 22 21 20
Fractional portion of seconds: 1/232 s
The Time Stamp mechanism in PROFIBUS DP is using this data type. However, the semantic is slightly different:
● The least significant Bit of the fractional portion (20) is device internally used to indicate a synchronized or unsynchronized state of the clock time.
NetworkTimeDifference This data type is composed of an integer value and of an unsigned value that express the difference in network time. The first element is an Integer32 data type that provides the network time difference in seconds. The second element is an Unsigned32 data type that provides the fractional portion of seconds in 1/232 s.
Numeric Identifier Data type name Value range Resolution Length
59 NetworkTimeDifference Byte 1 to 4: -231 ≤ i ≤ (231-1) Byte 5 to 8: 0 ≤ i ≤ (232-1)
S (1/232) s
8 Octets (Integer32 + Unsigned32)
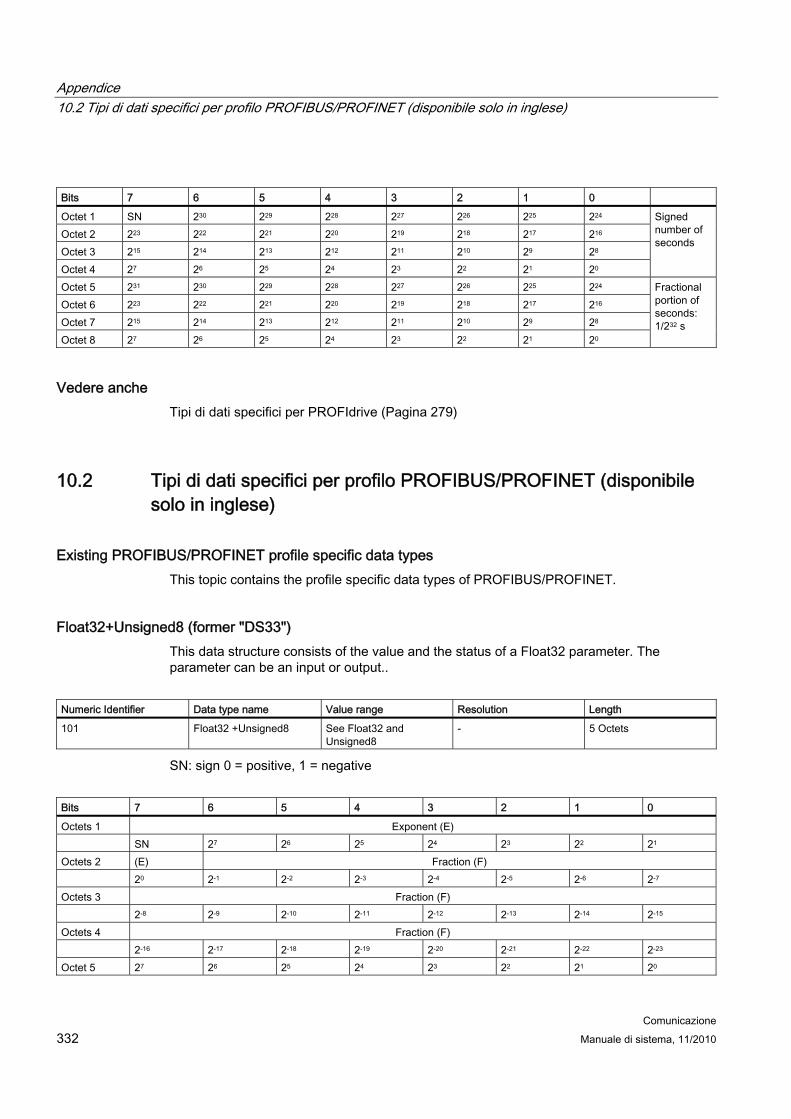
Appendice 10.2 Tipi di dati specifici per profilo PROFIBUS/PROFINET (disponibile solo in inglese)
Comunicazione 332 Manuale di sistema, 11/2010
Bits 7 6 5 4 3 2 1 0
Octet 1 SN 230 229 228 227 226 225 224 Octet 2 223 222 221 220 219 218 217 216 Octet 3 215 214 213 212 211 210 29 28 Octet 4 27 26 25 24 23 22 21 20
Signed number of seconds
Octet 5 231 230 229 228 227 226 225 224 Octet 6 223 222 221 220 219 218 217 216 Octet 7 215 214 213 212 211 210 29 28 Octet 8 27 26 25 24 23 22 21 20
Fractional portion of seconds: 1/232 s
Vedere anche Tipi di dati specifici per PROFIdrive (Pagina 279)
10.2 Tipi di dati specifici per profilo PROFIBUS/PROFINET (disponibile solo in inglese)
Existing PROFIBUS/PROFINET profile specific data types This topic contains the profile specific data types of PROFIBUS/PROFINET.
Float32+Unsigned8 (former "DS33") This data structure consists of the value and the status of a Float32 parameter. The parameter can be an input or output..
Numeric Identifier Data type name Value range Resolution Length
101 Float32 +Unsigned8 See Float32 and Unsigned8
- 5 Octets
SN: sign 0 = positive, 1 = negative
Bits 7 6 5 4 3 2 1 0
Octets 1 Exponent (E) SN 27 26 25 24 23 22 21 Octets 2 (E) Fraction (F) 20 2-1 2-2 2-3 2-4 2-5 2-6 2-7 Octets 3 Fraction (F) 2-8 2-9 2-10 2-11 2-12 2-13 2-14 2-15 Octets 4 Fraction (F) 2-16 2-17 2-18 2-19 2-20 2-21 2-22 2-23 Octet 5 27 26 25 24 23 22 21 20
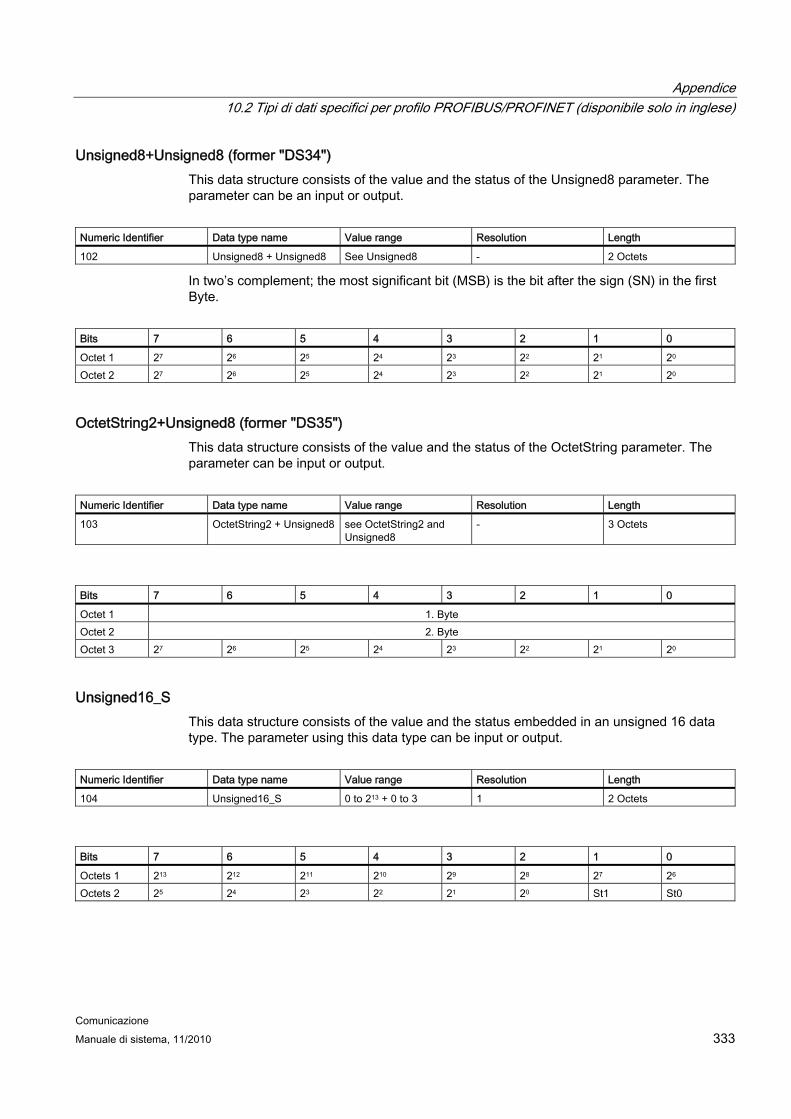
Appendice 10.2 Tipi di dati specifici per profilo PROFIBUS/PROFINET (disponibile solo in inglese)
Comunicazione Manuale di sistema, 11/2010 333
Unsigned8+Unsigned8 (former "DS34") This data structure consists of the value and the status of the Unsigned8 parameter. The parameter can be an input or output.
Numeric Identifier Data type name Value range Resolution Length
102 Unsigned8 + Unsigned8 See Unsigned8 - 2 Octets
In two’s complement; the most significant bit (MSB) is the bit after the sign (SN) in the first Byte.
Bits 7 6 5 4 3 2 1 0
Octet 1 27 26 25 24 23 22 21 20 Octet 2 27 26 25 24 23 22 21 20
OctetString2+Unsigned8 (former "DS35") This data structure consists of the value and the status of the OctetString parameter. The parameter can be input or output.
Numeric Identifier Data type name Value range Resolution Length
103 OctetString2 + Unsigned8 see OctetString2 and Unsigned8
- 3 Octets
Bits 7 6 5 4 3 2 1 0
Octet 1 1. Byte Octet 2 2. Byte Octet 3 27 26 25 24 23 22 21 20
Unsigned16_S This data structure consists of the value and the status embedded in an unsigned 16 data type. The parameter using this data type can be input or output.
Numeric Identifier Data type name Value range Resolution Length
104 Unsigned16_S 0 to 213 + 0 to 3 1 2 Octets
Bits 7 6 5 4 3 2 1 0
Octets 1 213 212 211 210 29 28 27 26 Octets 2 25 24 23 22 21 20 St1 St0
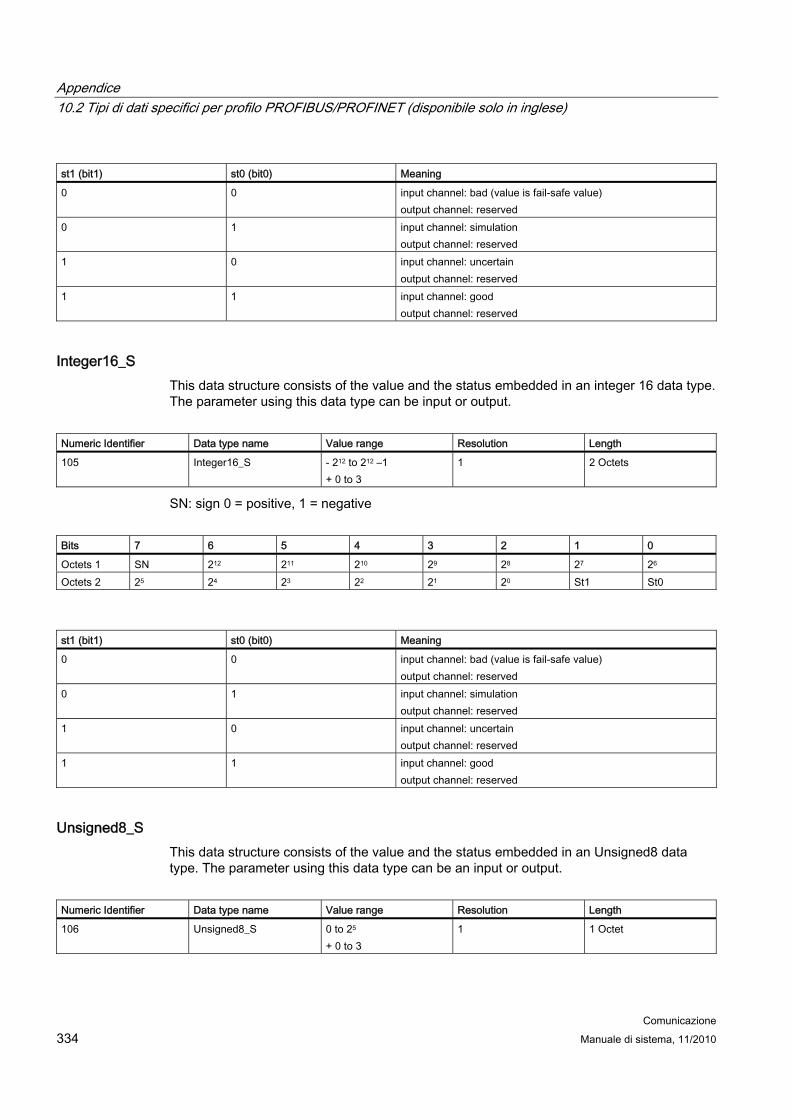
Appendice 10.2 Tipi di dati specifici per profilo PROFIBUS/PROFINET (disponibile solo in inglese)
Comunicazione 334 Manuale di sistema, 11/2010
st1 (bit1) st0 (bit0) Meaning
0 0 input channel: bad (value is fail-safe value) output channel: reserved
0 1 input channel: simulation output channel: reserved
1 0 input channel: uncertain output channel: reserved
1 1 input channel: good output channel: reserved
Integer16_S This data structure consists of the value and the status embedded in an integer 16 data type. The parameter using this data type can be input or output.
Numeric Identifier Data type name Value range Resolution Length
105 Integer16_S - 212 to 212 –1 + 0 to 3
1 2 Octets
SN: sign 0 = positive, 1 = negative
Bits 7 6 5 4 3 2 1 0
Octets 1 SN 212 211 210 29 28 27 26 Octets 2 25 24 23 22 21 20 St1 St0
st1 (bit1) st0 (bit0) Meaning
0 0 input channel: bad (value is fail-safe value) output channel: reserved
0 1 input channel: simulation output channel: reserved
1 0 input channel: uncertain output channel: reserved
1 1 input channel: good output channel: reserved
Unsigned8_S This data structure consists of the value and the status embedded in an Unsigned8 data type. The parameter using this data type can be an input or output.
Numeric Identifier Data type name Value range Resolution Length
106 Unsigned8_S 0 to 25 + 0 to 3
1 1 Octet
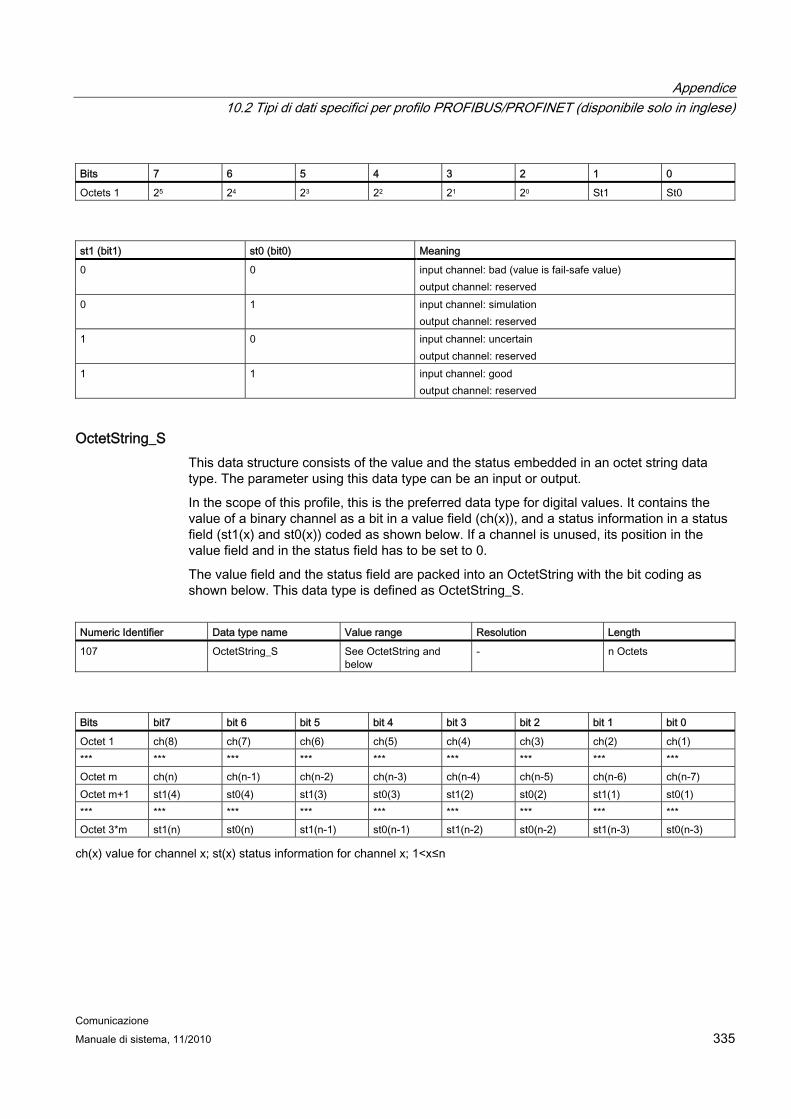
Appendice 10.2 Tipi di dati specifici per profilo PROFIBUS/PROFINET (disponibile solo in inglese)
Comunicazione Manuale di sistema, 11/2010 335
Bits 7 6 5 4 3 2 1 0
Octets 1 25 24 23 22 21 20 St1 St0
st1 (bit1) st0 (bit0) Meaning
0 0 input channel: bad (value is fail-safe value) output channel: reserved
0 1 input channel: simulation output channel: reserved
1 0 input channel: uncertain output channel: reserved
1 1 input channel: good output channel: reserved
OctetString_S This data structure consists of the value and the status embedded in an octet string data type. The parameter using this data type can be an input or output.
In the scope of this profile, this is the preferred data type for digital values. It contains the value of a binary channel as a bit in a value field (ch(x)), and a status information in a status field (st1(x) and st0(x)) coded as shown below. If a channel is unused, its position in the value field and in the status field has to be set to 0.
The value field and the status field are packed into an OctetString with the bit coding as shown below. This data type is defined as OctetString_S.
Numeric Identifier Data type name Value range Resolution Length
107 OctetString_S See OctetString and below
- n Octets
Bits bit7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
Octet 1 ch(8) ch(7) ch(6) ch(5) ch(4) ch(3) ch(2) ch(1) *** *** *** *** *** *** *** *** *** Octet m ch(n) ch(n-1) ch(n-2) ch(n-3) ch(n-4) ch(n-5) ch(n-6) ch(n-7) Octet m+1 st1(4) st0(4) st1(3) st0(3) st1(2) st0(2) st1(1) st0(1) *** *** *** *** *** *** *** *** *** Octet 3*m st1(n) st0(n) st1(n-1) st0(n-1) st1(n-2) st0(n-2) st1(n-3) st0(n-3)
ch(x) value for channel x; st(x) status information for channel x; 1<x≤n
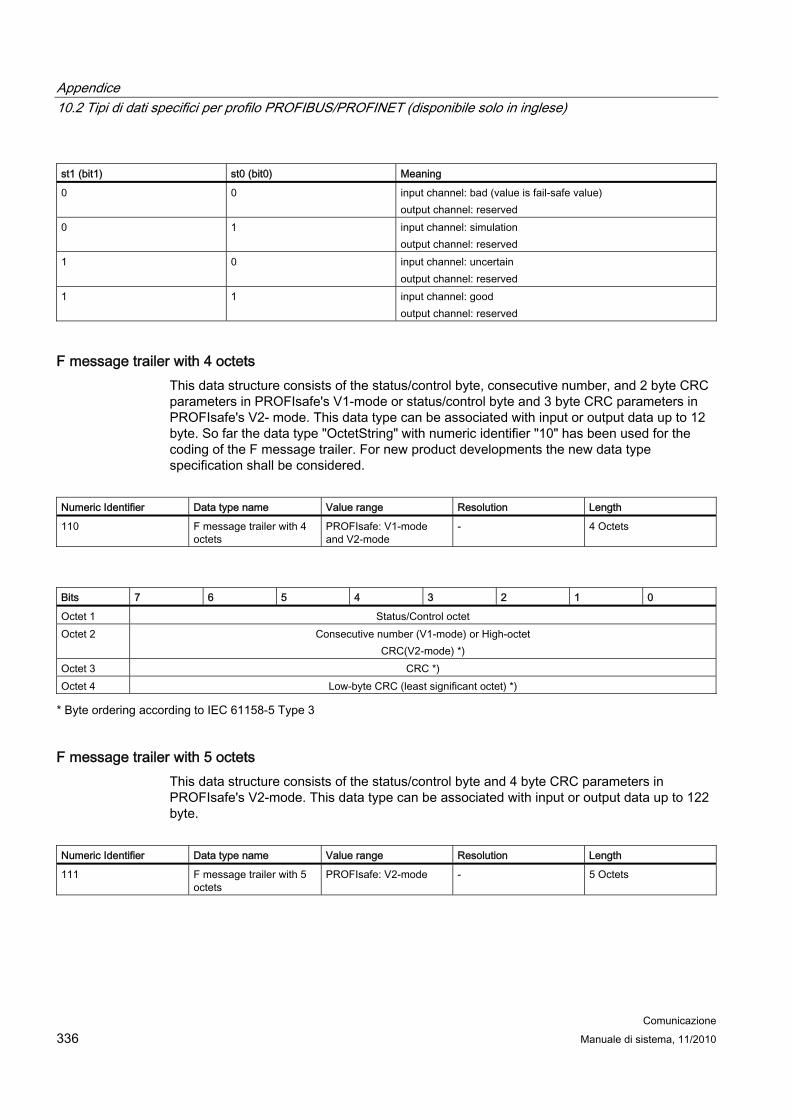
Appendice 10.2 Tipi di dati specifici per profilo PROFIBUS/PROFINET (disponibile solo in inglese)
Comunicazione 336 Manuale di sistema, 11/2010
st1 (bit1) st0 (bit0) Meaning
0 0 input channel: bad (value is fail-safe value) output channel: reserved
0 1 input channel: simulation output channel: reserved
1 0 input channel: uncertain output channel: reserved
1 1 input channel: good output channel: reserved
F message trailer with 4 octets This data structure consists of the status/control byte, consecutive number, and 2 byte CRC parameters in PROFIsafe's V1-mode or status/control byte and 3 byte CRC parameters in PROFIsafe's V2- mode. This data type can be associated with input or output data up to 12 byte. So far the data type "OctetString" with numeric identifier "10" has been used for the coding of the F message trailer. For new product developments the new data type specification shall be considered.
Numeric Identifier Data type name Value range Resolution Length
110 F message trailer with 4 octets
PROFIsafe: V1-mode and V2-mode
- 4 Octets
Bits 7 6 5 4 3 2 1 0
Octet 1 Status/Control octet Octet 2 Consecutive number (V1-mode) or High-octet
CRC(V2-mode) *) Octet 3 CRC *) Octet 4 Low-byte CRC (least significant octet) *)
* Byte ordering according to IEC 61158-5 Type 3
F message trailer with 5 octets This data structure consists of the status/control byte and 4 byte CRC parameters in PROFIsafe's V2-mode. This data type can be associated with input or output data up to 122 byte.
Numeric Identifier Data type name Value range Resolution Length
111 F message trailer with 5 octets
PROFIsafe: V2-mode - 5 Octets
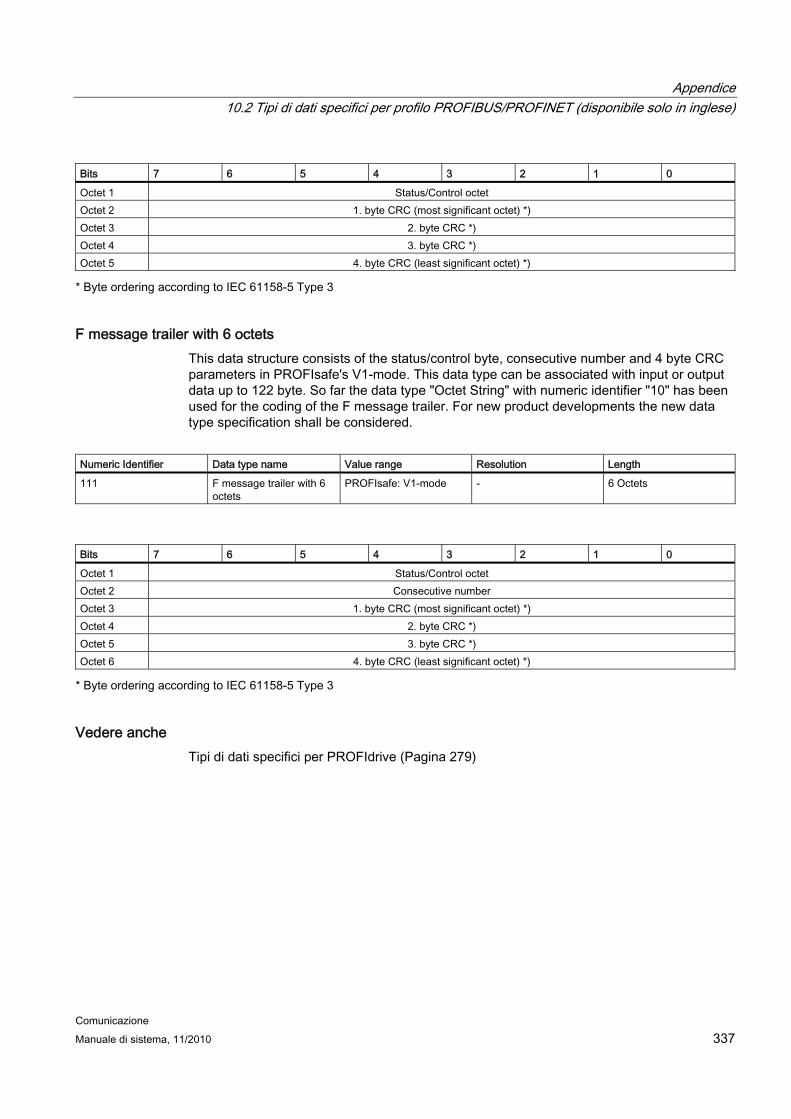
Appendice 10.2 Tipi di dati specifici per profilo PROFIBUS/PROFINET (disponibile solo in inglese)
Comunicazione Manuale di sistema, 11/2010 337
Bits 7 6 5 4 3 2 1 0
Octet 1 Status/Control octet Octet 2 1. byte CRC (most significant octet) *) Octet 3 2. byte CRC *) Octet 4 3. byte CRC *) Octet 5 4. byte CRC (least significant octet) *)
* Byte ordering according to IEC 61158-5 Type 3
F message trailer with 6 octets This data structure consists of the status/control byte, consecutive number and 4 byte CRC parameters in PROFIsafe's V1-mode. This data type can be associated with input or output data up to 122 byte. So far the data type "Octet String" with numeric identifier "10" has been used for the coding of the F message trailer. For new product developments the new data type specification shall be considered.
Numeric Identifier Data type name Value range Resolution Length
111 F message trailer with 6 octets
PROFIsafe: V1-mode - 6 Octets
Bits 7 6 5 4 3 2 1 0
Octet 1 Status/Control octet Octet 2 Consecutive number Octet 3 1. byte CRC (most significant octet) *) Octet 4 2. byte CRC *) Octet 5 3. byte CRC *) Octet 6 4. byte CRC (least significant octet) *)
* Byte ordering according to IEC 61158-5 Type 3
Vedere anche Tipi di dati specifici per PROFIdrive (Pagina 279)

Appendice 10.2 Tipi di dati specifici per profilo PROFIBUS/PROFINET (disponibile solo in inglese)
Comunicazione 338 Manuale di sistema, 11/2010
Comunicazione Manuale di sistema, 11/2010 339
Indice analitico
_ _readRecord
Applicazione, 299 _tcpCloseConnection
Comunicazione TCP, 163 _tcpCloseServer
Comunicazione TCP, 163 _tcpOpenClient
Comunicazione TCP, 160 _tcpOpenServer
Comunicazione TCP, 159 _tcpReceive
Comunicazione TCP, 162 _tcpSend
Comunicazione TCP, 161 _udpAddMulticastGroupMembership, 181 _udpDropMulticastGroupMembership, 182 _udpReceive, 180 _udpSend, 179 _writeRecord
Applicazione, 299 _xreceive, 38 _xsend, 37
A AG_LRECV (FC60), 171 AG_LSEND (FC50), 171 AG_RECV (FC6), 171 AG_SEND (FC5), 171 AG_SRECV (FC63), 171 AG_SSEND (FC53), 171 Apparecchio di azionamento SINAMICS, 258, 265 Avvertenza per il lettore, 4
B Base Mode Parameter Access, 284 Blocchi di comunicazione S7 TCP
Ethernet CP, 171, 176 Interfaccia Ethernet onboard, 164 UDT65, 165, 167
Blocchi di comunicazione S7 UDP
Ethernet CP, 183 Interfaccia Ethernet onboard, 182
Blocco di dati (PAP), 286
C Ciclo DP
PROFINET IO, 92 CIDR
Classless Inter-Domain Routing, 188 Clock di invio
Ciclo DP, 92 Comunicazione
SIMATIC come I-Slave, 31 SIMATIC come slave DP, 31 SIMOTION come I-Slave, 28 SIMOTION come slave DP, 27 tra SIMOTION e SIMATIC, 25
Comunicazione aciclica, 284 Comunicazione DP-V1
Esempio di programma, 317 Comunicazione Ethernet CP
Progettazione, 172, 184 Comunicazione PROFIsafe, 256, 264 Comunicazione TCP, 155
Funzioni di sistema SIMOTION, 158 Libreria LCom, 154
Comunicazione UDP, 177 Funzioni di sistema, 178
Controller Application Cycle Factor, 62
D Dominio Sync, 50
Creazione, 89 Drive Based Safety
Funzioni, 209 Telegrammi, 211
E Ethernet
Libreria LCom, 154 Proprietà delle sottoreti, 153 Utilizzo interfaccia, 154
Indice analitico
Comunicazione 340 Manuale di sistema, 11/2010
F F-CPU SIMATIC, 256, 264 F-Proxy
PROFIsafe, 212 Proxy F dell'I-Device, 217
Funzione di sistema _tcpCloseConnection, 163 Funzione di sistema _tcpCloseServer, 163 Funzione di sistema _tcpOpenClient, 160 Funzione di sistema _tcpOpenServer, 159 Funzione di sistema _tcpReceive, 162 Funzione di sistema _tcpSend, 161 Funzione di sistema _udpAddMulticastGroupMembership, 181 Funzione di sistema _udpReceive, 180 Funzione di sistema _udpSend, 179
I Inserimento scheda PROFINET, 82 IRT Elevata Performance, 48 I-Slave
SIMATIC, 31 SIMOTION, 28
L Libreria LCom, 154
M Master Sync
ridondante, 72 Master-master PROFIBUS
Funzioni di sistema S7, 35 Funzioni SIMOTION, 37
Messa in servizio PROFIsafe con Scout, 256, 264
Modello di diagnostica, 138
P PN/PN-Coupler, 136 PROFIBUS
Comunicazione aciclica, 284 Comunicazione DPV1, 284 Servizi ciclici, 25
PROFIdrive Classi si applicazioni, 277 Profilo, 271
PROFINET
Inserire CBE30, 82 PROFINET IO
IO-Controller, 40 IO-Device, 40 RT, 47 Scambio di dati SIMATIC - SIMOTION, 137
PROFIsafe Accoppiamento master-slave, 260 Adattamento degli indirizzi F in tutto il progetto, 232 Conversione da PROFIBUS a PROFINET, 239 F-Proxy, 212 Nozioni di base, 209 PROFIBUS, presupposti, 254 Progettazione di SIMOTION D, 256 Proxy F dell'I-Slave, 254 Proxy F dell'I-Slave PROFIBUS, 256 Traffico trasversale F, 254, 264
Progettazione Shared Device, 243
Progettazione trasmettitore, 117 Proxy F dell'I-Device
Caratteristiche, 220 Indirizzo F, 241 Nozioni di base, 217 Presupposti, 218 Procedura di progettazione, 224 PROFIBUS integrated, 223 PROFINET, 222 Progettazione, 226, 235 Runtime, 220 Topologia PROFIBUS, 221
Proxy F dell'I-Slave, 254
R Rapporto di clock, 62 Regolatore del numero di giri
Impostazione automatica del regolatore, 209 Ricevente
Progettazione, 118 Routing
Routing S7, 188
S Shared Device
Nozioni di base, 242 Progettazione, 243, 248
SIMOTION IT Accesso alle variabili, 205 IT-DIAG, 204
Indice analitico
Comunicazione Manuale di sistema, 11/2010 341
OPC XML-DA, 206 Slave DP
SIMOTION, 27 Slave SP
SIMATIC, 31 Slot PROFIsafe, 258, 265
T Telegramma PROFIBUS, 258, 265 Topologia
Progettazione, 96 Trasferimento file FTP, 207
U UDT65, 165, 167
X X_RCV, 36 X_SEND, 35

Indice analitico
Comunicazione 342 Manuale di sistema, 11/2010





























