Embed Size (px)
DESCRIPTION
Sisteme de Actionare ale Robotilor Industriali
Citation preview
COLEGIUL TEHNIC BUZAU
Profil:
Mecanică Mecatronist
TEMA PROIECTULUI
Sisteme de actionare ale robotilor industriali
Coordonator: Eduard Mavrodin
CUPRINS
CAPITOLUL.I. ACTIONAREA ROBOTILOR INDUSTRIALI...............................31.1.Sistene de actionare electrica ………………………………………................4
1
1.2. Motoare de curent continuu………………………………................................41.3. Motor pas cu pas........…………………………………………………….…..8
CAPITOLUL II. SISTEME DE ACTIONARE HIDRAULICA.............................102.1.Mediul hidraulic........................................................................................102.2.Cerinte impuse mediului hidraulic si tipuri de medii utilizate...........................102.3.Principiul de functionare a sistemelor de actionare hidraulica....................112.4.Sisteme de actionare de tip hidrostatic ......................................................112.5.Pompe cu pistoane axial……………………………………………………...122.6.Motoare hidraulice……………………………………………………………122.7.Motoare circulare(rotative)…………………………………………………..122.8.Motoare liniare………………………………………………………….…….13
CAPITOLUL III.SISTEME DE ACTINOARE PNEUMATICA….…….……..143.1.Schema pneumatica……………………………………………………….….153.2.Clasificarea sistemelor pneumatice………………………………………….153.3.Reprezentarea sistemelor de actinoare pneumatica…………………………163.4.Exemple de elemente pneumatice……………………………………………173.5.Structura unei scheme pneumatice…………………………………..………18
CAPITOLUL IACTIONAREA ROBOTILOR INDUSTRIALI
2
Sistemul de acţionare al unui robot cuprinde totalitatea surselor energetice ale robotului precum şi elementele de control direct ale acestora. În acest sens, prin sistem de acţionare se va înţelege ansamblul motoarelor şi convertoarelor prin care se obţine energia mecanică necesară deplasării robotului precum şi dispozitivele suplimentare ce controlează acest transfer energetic.
Un astfel de sistem va cuprinde :1) o sursă primară de energie ;2) un sistem de conversie al energiei primare în energie mecanică ;3) un sistem pentru transmisia energiei mecanice la articulaţia corespunzătoare ;4) un control al parametrilor caracteristici ale acestor sisteme.
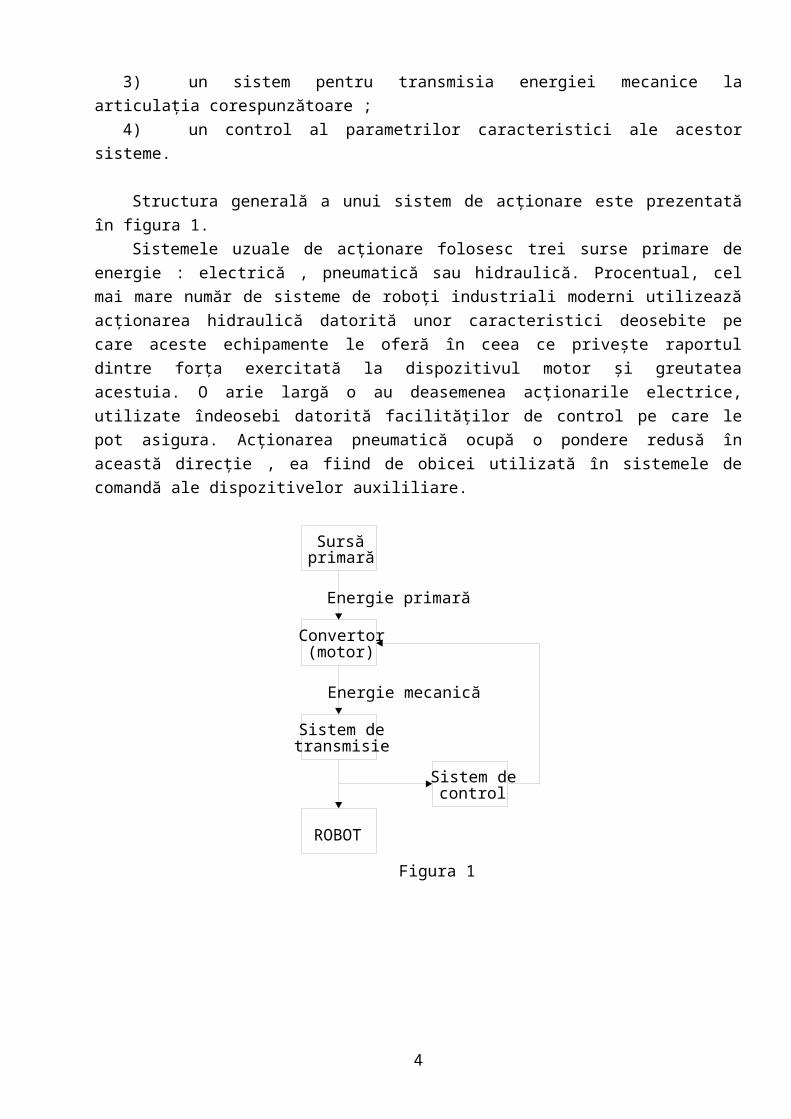
Structura generală a unui sistem de acţionare este prezentată în figura 1.Sistemele uzuale de acţionare folosesc trei surse primare de energie : electrică , pneumatică sau
hidraulică. Procentual, cel mai mare număr de sisteme de roboţi industriali moderni utilizează acţionarea hidraulică datorită unor caracteristici deosebite pe care aceste echipamente le oferă în ceea ce priveşte raportul dintre forţa exercitată la dispozitivul motor şi greutatea acestuia. O arie largă o au deasemenea acţionarile electrice, utilizate îndeosebi datorită facilităţilor de control pe care le pot asigura. Acţionarea pneumatică ocupă o pondere redusă în această direcţie , ea fiind de obicei utilizată în sistemele de comandă ale dispozitivelor auxililiare.
Figura 1
1.1 Sisteme de acţionare electrică
Sursăprimară
Convertor(motor)
Sistem detransmisie
ROBOT
Sistem decontrol
Energie mecanică
Energie primară
3
Deşi mai puţin utilizată decât acţionarea hidraulică, acţionarea electrică ocupă o arie suficient de întinsă la roboţii industriali datorită următoarelor avantaje principale :
a) sursa de energie electrică primară este uşor de găsit;b) sistemele de control sunt precise, sigure şi relativ uşor de cuplat la o conducere numerică la
nivel înalt;c) se poate asigura o funcţionare autonomă prin alimentarea cu baterii;d) nu se impun probleme specifice de poluare.
1.2 Motoare de curent continuuAcţionarea cu motoare de curent continuu are avantajul important că momentul creat este
practic independent de poziţia şi viteza motorului, depinzând numai de câmpul înfăşurărilor şi curentul din armături. Dacă înfăşurările de câmp sunt înlocuite cu un magnet permanent atunci momentul dezvoltat este proporţional cu valoarea curentului din armături şi deci cu tensiunea aplicată.
Anumite proceduri tehnologice au permis micşorarea greutăţii motoarelor. Ele se referă, de exemplu, la eliminarea înfăşurărilor de excitaţie prin utilizarea motoarelor cu magnet sau micşorarea greutăţii rotorului prin motoarele disc. Deşi teoretic, orice motor electric este susceptibil de utilizare, pentru acţionarea roboţilor se utilizează numai motoare de curent continuu şi pas cu pas, primul datorită sistemelor performante de control, iar al doilea datorită facilităţilor pe care le oferă în controlul în buclă deschisă la operaţiile de poziţionare .
Dezavantajul principal al acestor acţionări este greutatea componentelor. Raportul putere - greutate sau moment - greutate este mai mic decât la acţionările hidraulice. Această greutate nu poate fi redusă în mod semnificativ datorită circuitului magnetic care, pentru asigurarea unor performanţe ridicate necesită o geometrie corespunzătoare.
Utilizarea motorului de c.c în acţionarea roboţilor impune :a) un sistem de control utilizând tahogeneratoare şi transformatoare de poziţie;b) un sistem mecanic care să realizeze conversia miscării de rotaţie in mişcare de translaţie;c) un sistem mecanic pentru blocarea motorului .Motoarele de curent continuu sunt formate din două părţi : un sistem de excitatie şi o înfăşurare
dispusă într-o armătură rotorică. Un sistem de comutaţie, asigură în permanenţă un sens unic al curentului în raport cu câmpul magnetic, deci asigura o forţă în direcţie constantă.
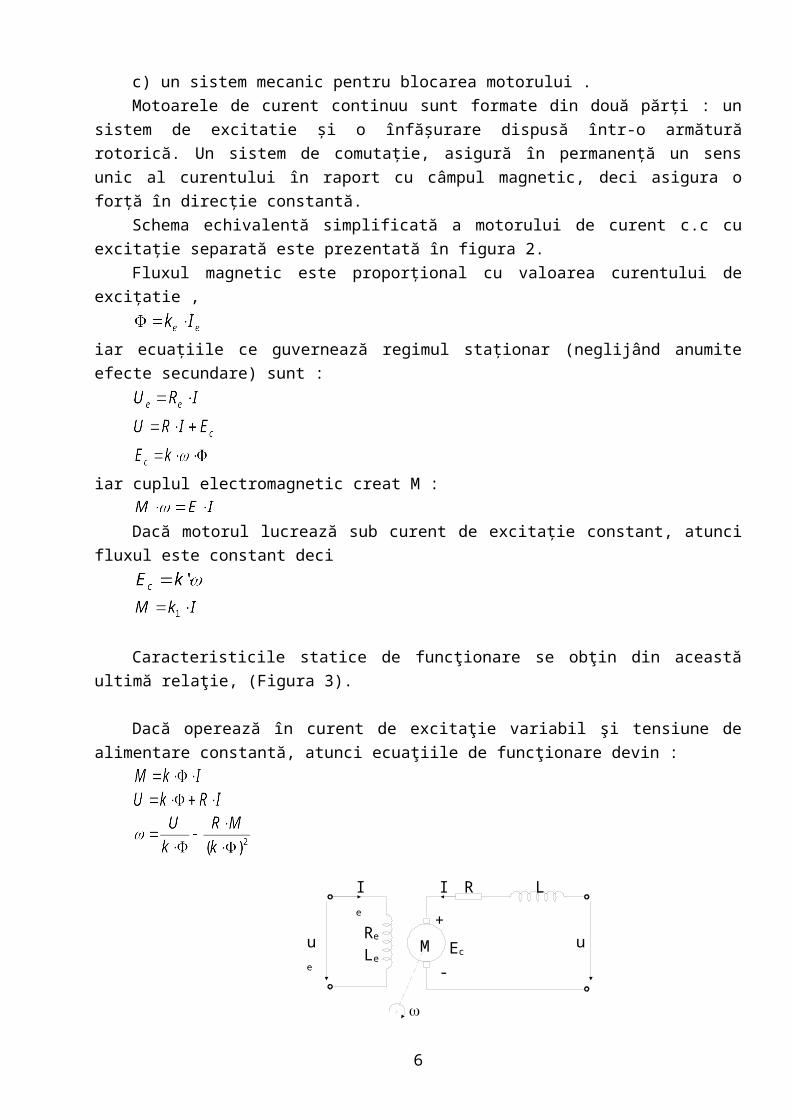
Schema echivalentă simplificată a motorului de curent c.c cu excitaţie separată este prezentată în figura 2.
Fluxul magnetic este proporţional cu valoarea curentului de exciţatie ,
iar ecuaţiile ce guvernează regimul staţionar (neglijând anumite efecte secundare) sunt :
iar cuplul electromagnetic creat M :
Dacă motorul lucrează sub curent de excitaţie constant, atunci fluxul este constant deci
Caracteristicile statice de funcţionare se obţin din această ultimă relaţie, (Figura 3).
4
Dacă operează în curent de excitaţie variabil şi tensiune de alimentare constantă, atunci ecuaţiile de funcţionare devin :
Figura 2Ultima relaţie indică o dependenţă neliniară pronunţată a vitezei în raport cu fluxul, deci
curentul de excitaţie. Această neliniaritate complică legea de control şi face ca reglajul turaţiei prin controlul curentului de excitaţie să fie rar utilizat în sistemele de acţionare, în general, şi a roboţilor, în particular.
Regimul tranzitoriu al motorului ce operează sub flux constant se obţine imediat din figura 2.
iar cuplul motor va fi:
unde este momentul de inerţie al elementelor de rotaţie, defineşte coeficientul de frecare
vâscoasă, este cuplul corespunzător frecării uscate iar este cuplul de sarcină.Din ( 3.9 ) si (3.13 ) se obţine:
Figura 3
Ie R LI
Re
Le
ue Ec
+u
M
-
M U
U2>U1
U1
M=M
0 M≠M
0
5
Ecuaţiile de mai sus sunt, în principiu, specifice motoarelor disc, dar pot fi aplicate la toate motoarele utilizate în sistemele de acţionare ale roboţilor, diferenţierile fiind de ordin tehnologic. Aceste ecuaţii indică reglajul preferenţial al turaţiei prin reglarea tensiunii de alimentare . Controlulde tensiune al turaţiei este utilizat practic în peste 85% din sistemele de acţionare al roboţilor (cu acţionare prin motor de c.c. ) şi numai o mică parte utilizează controlul prin curent, această ultimă procedură fiind avantajoasă datorită funcţiei de transfer mai simple între cuplu şi curent.
Controlul în tensiune al turaţiei în acţionarea roboţilor se rezolvă prin două metode: redresoare comandate cu tiristoare; variatoare de tensiune continuăRedresoarele comandate cu tiristoare reprezintă o soluţie extrem de larg utilizată şi o literatură
extrem de bogată abordează această problematică [38, 31, 81]. Din mulţimea structurilor şi schemelor bazate pe această metoda, se vor prezenta câteva tipuri utilizate frecvent în controlul roboţilor.
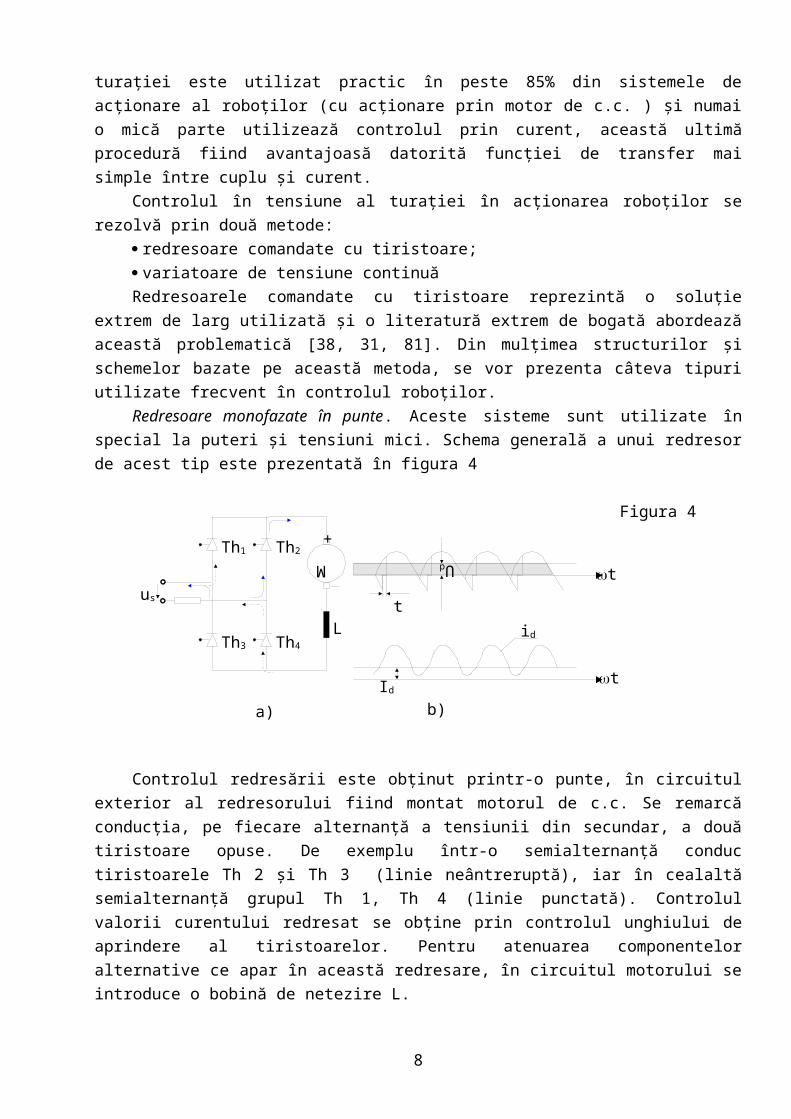
Redresoare monofazate în punte. Aceste sisteme sunt utilizate în special la puteri şi tensiuni mici. Schema generală a unui redresor de acest tip este prezentată în figura 4
Figura 4
Controlul redresării este obţinut printr-o punte, în circuitul exterior al redresorului fiind montat motorul de c.c. Se remarcă conducţia, pe fiecare alternanţă a tensiunii din secundar, a două tiristoare opuse. De exemplu într-o semialternanţă conduc tiristoarele Th 2 şi Th 3 (linie neântreruptă), iar în cealaltă semialternanţă grupul Th 1, Th 4 (linie punctată). Controlul valorii curentului redresat se obţine prin controlul unghiului de aprindere al tiristoarelor. Pentru atenuarea componentelor alternative ce apar în această redresare, în circuitul motorului se introduce o bobină de netezire L.
Redresoare trifazate în puncte. Circuitele de acest tip reprezintă stuctura cea mai eficientă pentru alimentarea motoarelor de c.c. sub raportul puterii şi randamentului.
Variatoare de tensiune continuă. Aceste dispozitive trasformă o tensiune continuă aplicată la intrare, în impulsuri dreptunghiulare de tensiune, la ieşire, astfel încât valoarea medie a tensiunii de ieşire se poate modifica în funcţie de factorul de umplere al impulsurilor. Schema de principiu a unei astfel de valori este prezentată în figura 5
t
Ud
t
Idt
id
b)
+
M
L
us
Th1 Th2
Th3 Th4
a)
6
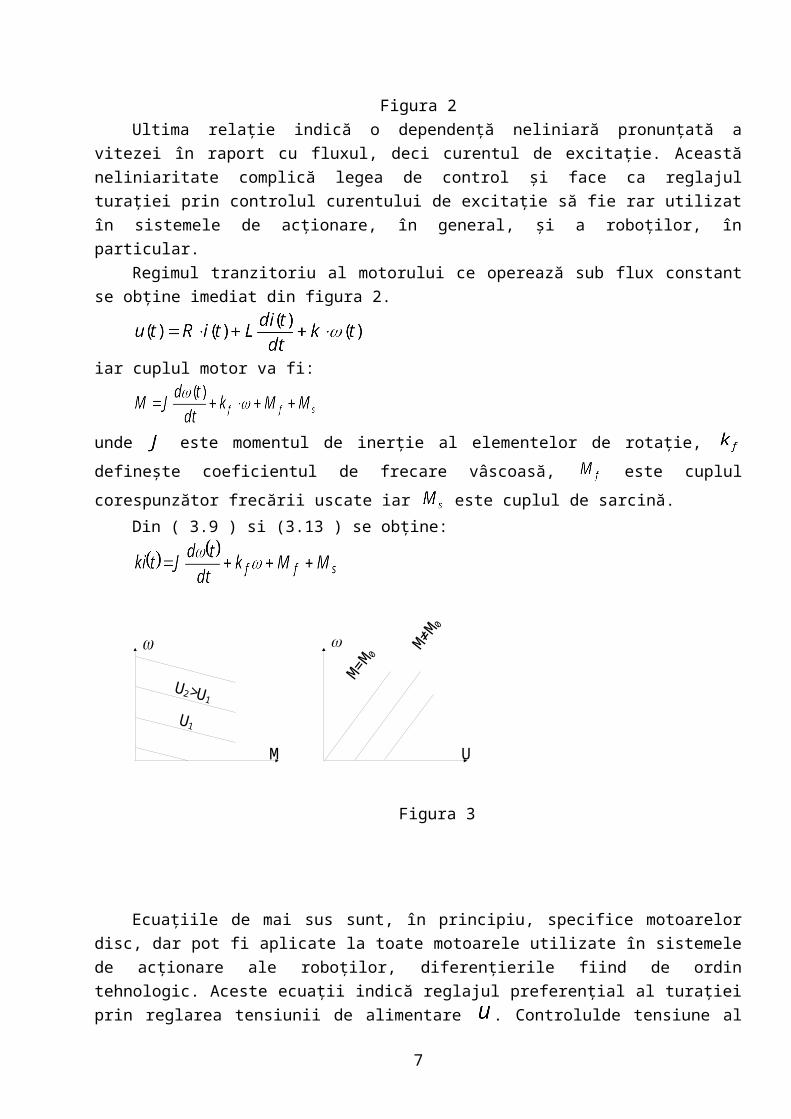
Figura 5Elementul principal al dispozitivului este un comutator static CS realizat, de obicei, dintr-un
tiristor comandat. Închiderea comutatorului înseamnă aplicarea semnalului de tensiune de amplitudine U pe bornele motorului, regim menţionat pe o durata de timp T i. Prezenţa inductiei L determină o creştere a curentului, presupusă idealizat ca o creştere liniara.
Deschiderea întrerupatorului înseamnă decuplarea alimentării E şi închiderea curentului de autoinducţie prin dioda D. Valoarea medie a tensiunii la bornele motorului va fi:
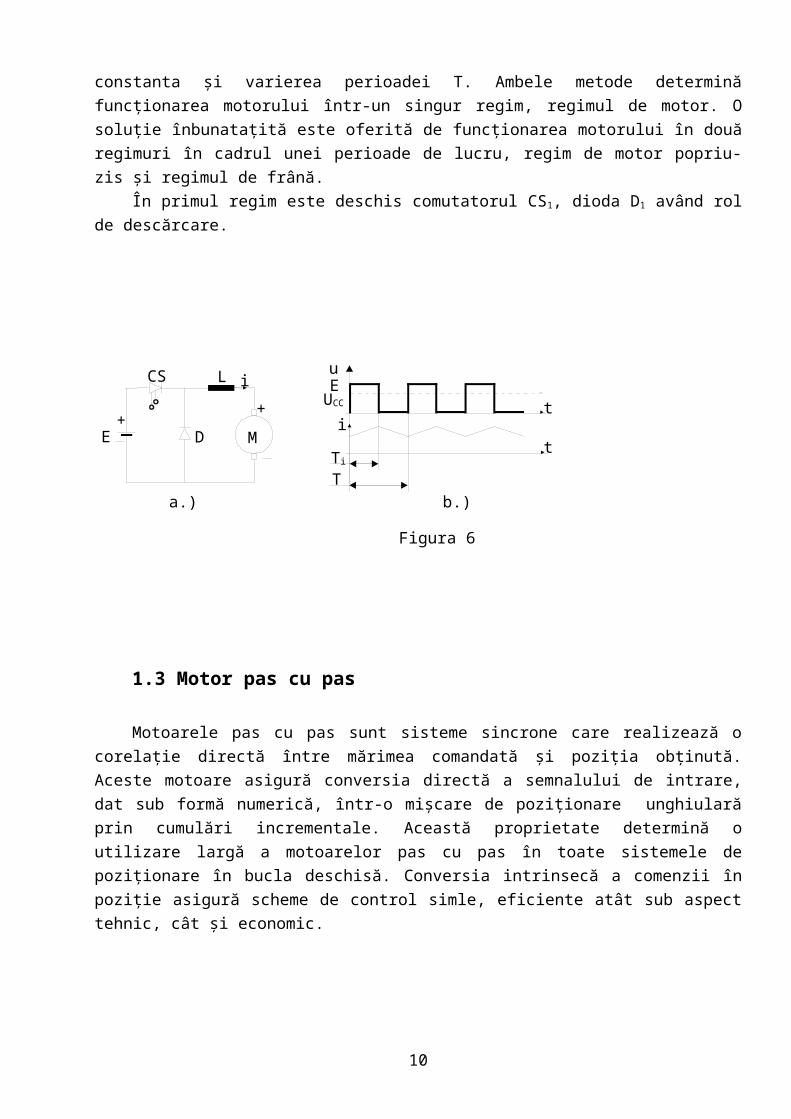
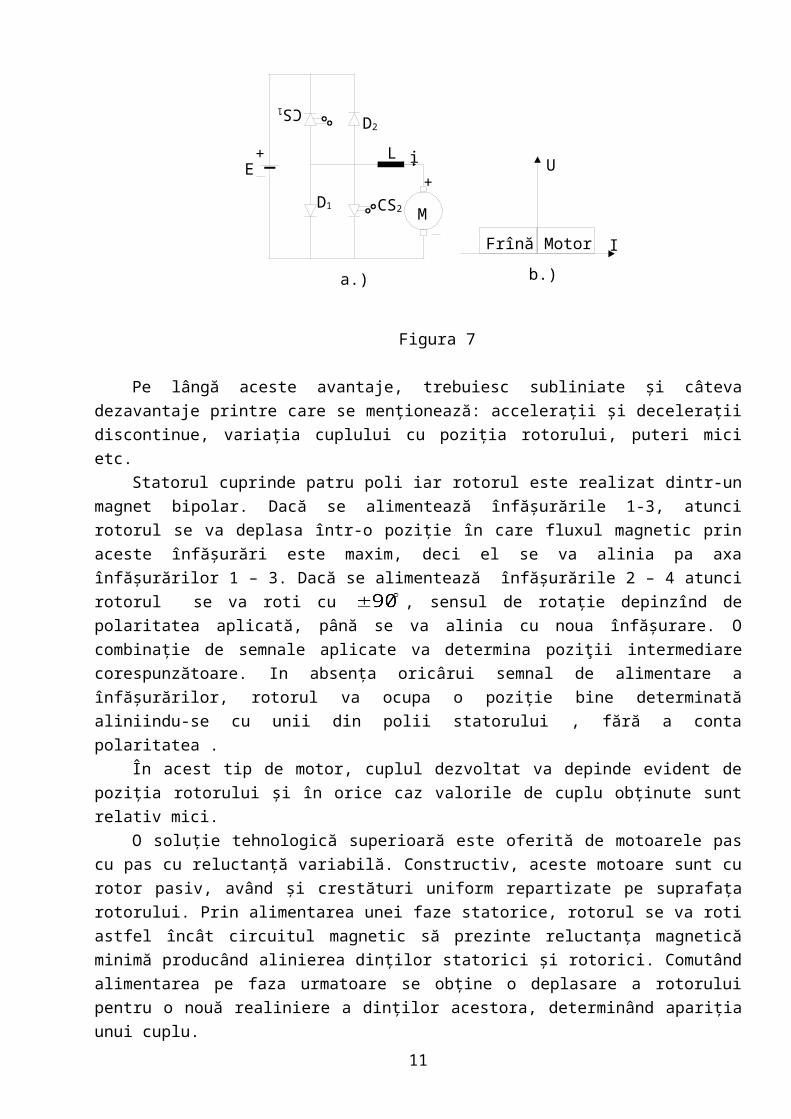
Această relaţie indică doua modalităţi de control a componentei continue: a) prin ajustarea duratei impulsului T în cadrul unei perioade T de comutare constantă ; b) prin menţinerea duratei T constanta şi varierea perioadei T. Ambele metode determină funcţionarea motorului într-un singur regim, regimul de motor. O soluţie înbunataţită este oferită de funcţionarea motorului în două regimuri în cadrul unei perioade de lucru, regim de motor popriu-zis şi regimul de frână.
În primul regim este deschis comutatorul CS1, dioda D1 având rol de descărcare.
Figura 6M
L L
L L
i
a.)
u
t
b.)
t+
M
L
E
+
CS
D
i EUCC
i
Ti
T
7
1.3 Motor pas cu pas
Motoarele pas cu pas sunt sisteme sincrone care realizează o corelaţie directă între mărimea comandată şi poziţia obţinută. Aceste motoare asigură conversia directă a semnalului de intrare, dat sub formă numerică, într-o mişcare de poziţionare unghiulară prin cumulări incrementale. Această proprietate determină o utilizare largă a motoarelor pas cu pas în toate sistemele de poziţionare în bucla deschisă. Conversia intrinsecă a comenzii în poziţie asigură scheme de control simle, eficiente atât sub aspect tehnic, cât şi economic.
Figura 7
Pe lângă aceste avantaje, trebuiesc subliniate şi câteva dezavantaje printre care se menţionează: acceleraţii şi deceleraţii discontinue, variaţia cuplului cu poziţia rotorului, puteri mici etc.
Statorul cuprinde patru poli iar rotorul este realizat dintr-un magnet bipolar. Dacă se alimentează înfăşurările 1-3, atunci rotorul se va deplasa într-o poziţie în care fluxul magnetic prin aceste înfăşurări este maxim, deci el se va alinia pa axa înfăşurărilor 1 – 3. Dacă se alimentează înfăşurările 2 – 4 atunci rotorul se va roti cu , sensul de rotaţie depinzînd de polaritatea aplicată, până se va alinia cu noua înfăşurare. O combinaţie de semnale aplicate va determina poziţii intermediare corespunzătoare. In absenţa oricârui semnal de alimentare a înfăşurărilor, rotorul va ocupa o poziţie bine determinată aliniindu-se cu unii din polii statorului , fără a conta polaritatea .
În acest tip de motor, cuplul dezvoltat va depinde evident de poziţia rotorului şi în orice caz valorile de cuplu obţinute sunt relativ mici.
O soluţie tehnologică superioară este oferită de motoarele pas cu pas cu reluctanţă variabilă. Constructiv, aceste motoare sunt cu rotor pasiv, având şi crestături uniform repartizate pe suprafaţa rotorului. Prin alimentarea unei faze statorice, rotorul se va roti astfel încât circuitul magnetic să prezinte reluctanţa magnetică minimă producând alinierea dinţilor statorici şi rotorici. Comutând alimentarea pe faza urmatoare se obţine o deplasare a rotorului pentru o nouă realiniere a dinţilor acestora, determinând apariţia unui cuplu.
E +
M
L+
i
a.)
U
IFrînă Motor
b.)
CS1
D2
CS2D1
8
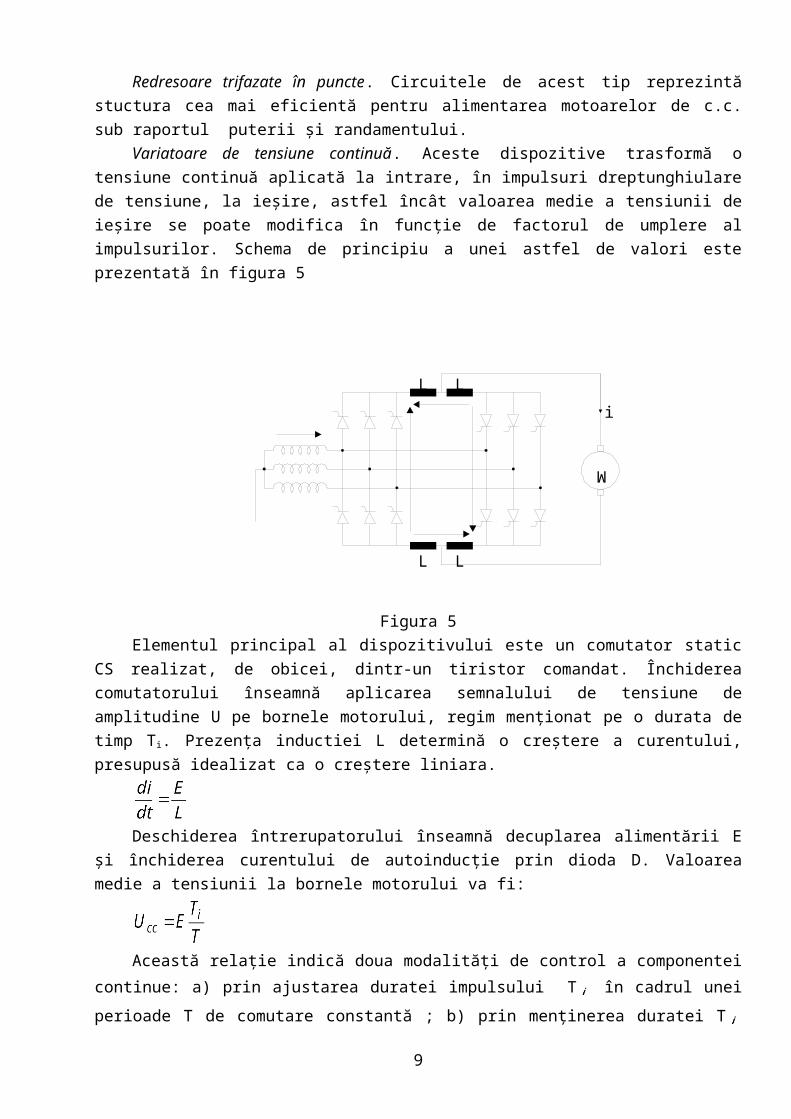
Figura 8
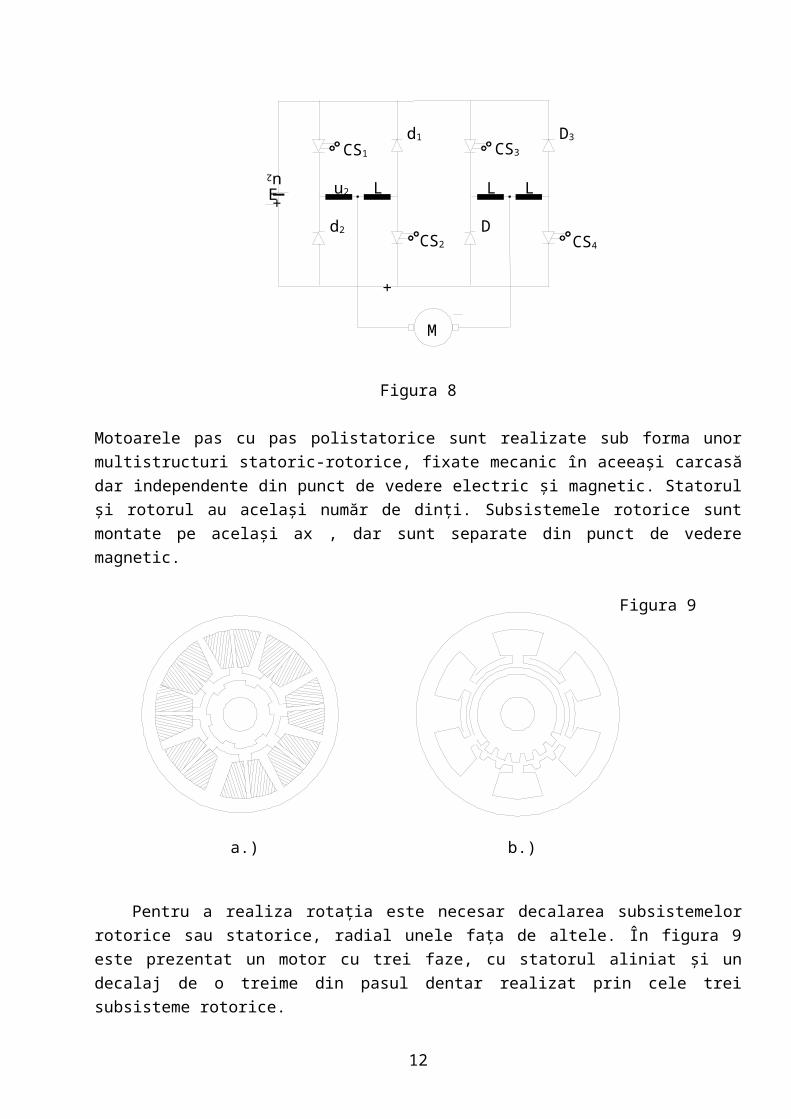
Motoarele pas cu pas polistatorice sunt realizate sub forma unor multistructuri statoric-rotorice, fixate mecanic în aceeaşi carcasă dar independente din punct de vedere electric şi magnetic. Statorul şi rotorul au acelaşi număr de dinţi. Subsistemele rotorice sunt montate pe acelaşi ax , dar sunt separate din punct de vedere magnetic.
Figura 9
Pentru a realiza rotaţia este necesar decalarea subsistemelor rotorice sau statorice, radial unele faţa de altele. În figura 9 este prezentat un motor cu trei faze, cu statorul aliniat şi un decalaj de o treime din pasul dentar realizat prin cele trei subsisteme rotorice.
Indiferent de principiul de funcţionare al motorului, comanda acestuia se realizează prin comutarea succesivă a fazelor înfăşurarilor.
E
+
M
u2+u2
LL L
CS1 CS3
CS2 CS4
d1
d2
D3
D
a.) b.)
9
CAPITOLUL IISisteme de acţionare hidraulică
Aceste dispozitive se bazează pe principiul conversiei energiei unui fluid incompresibil în energie mecanică. Lichidul utilizat este un ulei mineral ce acţionează la presiuni de până la 100 atm., sursa de presiune hidraulică fiind încorporată în sistemul de acţionare propriu al robotului sau aparţinând unui sistem centralizat[38].
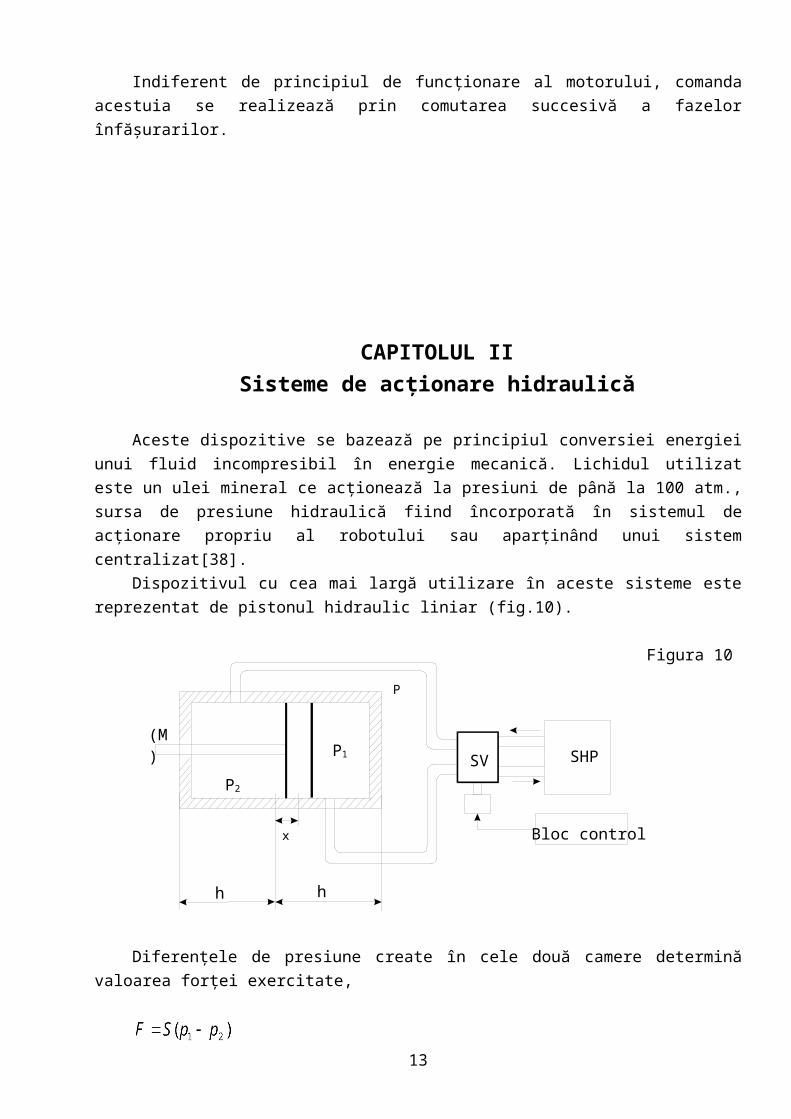
Dispozitivul cu cea mai largă utilizare în aceste sisteme este reprezentat de pistonul hidraulic liniar (fig.10).
Figura 10
Diferenţele de presiune create în cele două camere determină valoarea forţei exercitate,
Aceste presiuni sunt create prin asigurarea circulaţiei fluidului pe anumite căi de fluid prin intermediul unui servoventil SV de la o sursă de putere hidraulica SPH. Controlul servoventilului este realizat electric.
2.1 Mediul hidraulic
Mediul hidraulic, agentul motor sau lichidul de lucru sunt denumiri atribuite frecvent fluidului utilizat in sistemele hidraulice de acţionare. Acest fluid este supus, în timpul funcţionării sistemului, unor condiţii de lucru deosebit de grele pentru transmiterea mişcării şi efortului, cum sunt: variaţia într-un domeniu larg a temperaturii, presiunii şi vitezelor de lucru, condiţii în care trebuie să-şi menţină propietăţile fizico-chimice şi mecanice pe o perioadă determinată.
2.2 Cerinţe impuse mediului hidraulic şi tipuri de medii utilizate
Condiţiile grele de lucru expuse ridică restricţii deosebit de severe şi impun o selectare riguroasă a categoriilor de fluide care să corespundă la majoritatea cerinţelor ce se impun acestora. Dintre cele
Bloc control
SV SHP
P
P1
P2
(M)
x
h h
10
mai importante cerinţe care se impun şi pe baza cărora se aleg aceste lichide de lucru, se menţionează următoarele:
- bune propietăţi lubrifiante şi înaltă rezistenţă mecanică a peliculei de lichid;- înaltă rezistenţă şi stabilitate chimică şi termică spre a prevenii oxidarea, descompunerea şi
degradarea acestuia;- variaţie minimă a vâscozităţii cu temperatura;- să nu degaje vapori la temperaturi obişnuite de funcţionare şi să nu conţină impurităţi care să
faciliteze degajare de vapori;- să nu conţină, să nu absoarbă şi să nu degaje aer peste cantitatea admisa de prescripţiile
tehnice;- să nu provoace corodarea şi deteriorarea elementelor de etanşare;- să aibă un punct ridicat de inflamabilitate şi cât mai scăzut de congelare;- conţinut minim de impurităţi mecanice si tehnice.
Lichidele care corespund cel mai bine la aceste cerinţe şi care au căpătat o largă răspândire sunt uleiurile minerale. În afară de acestea se folosesc şi o serie de lichide de sinteză precum şi alte medii, în condiţii speciale de funcţionare.
2.3 Principiul de funcţionare a sistemelor de acţionare hidraulică
2.4 Sisteme de acţionare de tip hidrostatic
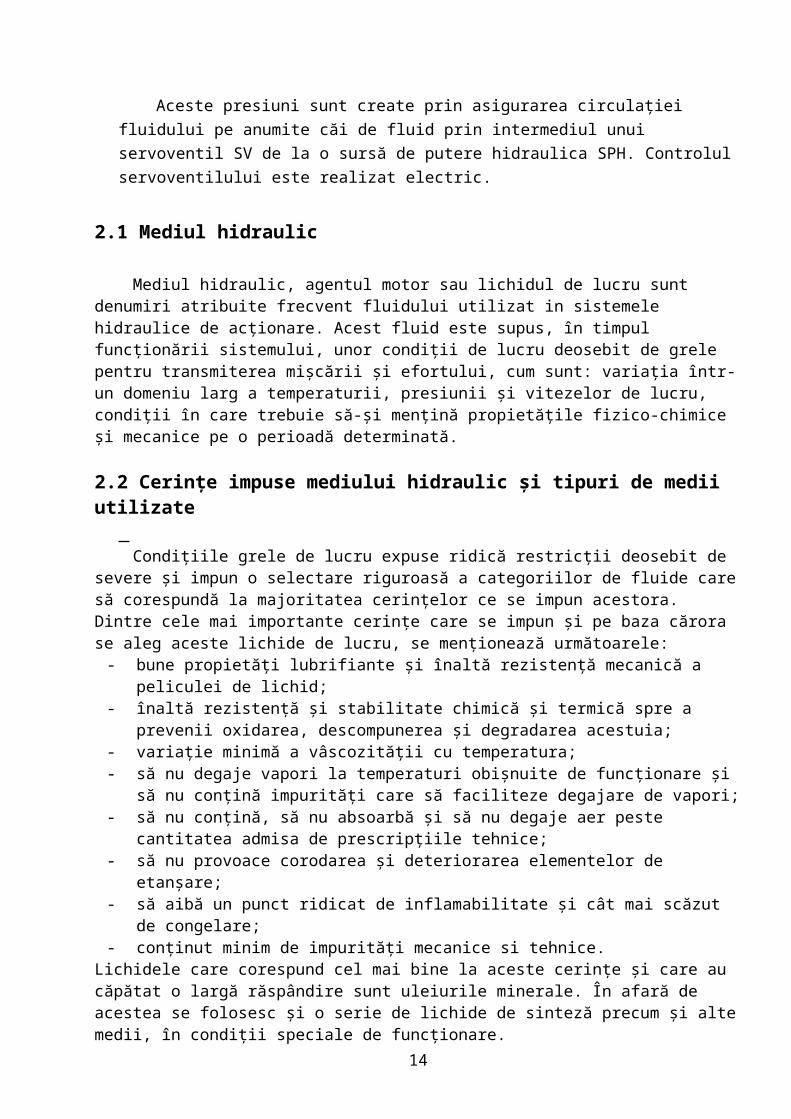
Sistemele hidrostatice sau volumice au, drept element primar al transformatorului TT, generatorul de presiune hidrostatică (pompă) GH, care transformă energia mecanică primită de la motorul electric ME în energie potenţială a fluidului, pe care o transmite apoi elementului secundar care este motorul hidraulic rotativ MHR sau liniar MHL. Acesta reconverteşte energia hidrostatică în energie mecanică, pe care o livrează apoi organului de execuţie OE al maşinii acţionate. Variaţia parametrilor mişcării se realizează cu ajutorul aparatajului de comandă şi de reglare ACR sau direct prin variaţia capacităţii generatorului sau a motorului.
Aceste sisteme au o arie largă de răspândire datorită unor calităţi deosebite ca: simplitate constructivă, uşurinţă în reglarea vitezelor, şi a realizării stabilităţii acesteia, gabarit redus, randament ridicat etc.
11
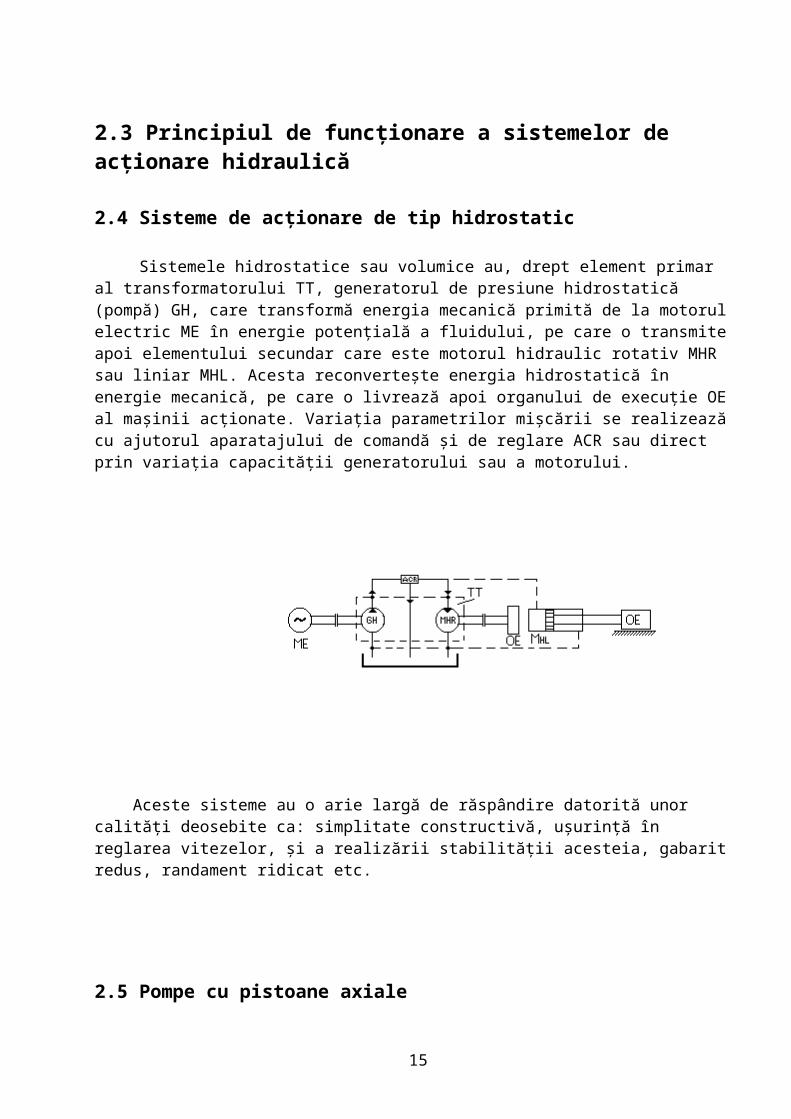
2.5 Pompe cu pistoane axiale
Pompele cu pistoanele axiale reprezintă o altă variantă a pompelor cu piston în care pistoanele sunt dispuse axial, deci paralel cu axa de rotaţie a rotorului (blocului), mişcarea activă a pistoanelor realizându-se fie de un disc înclinabil sau fix, fie de o camă frontală. Dispunerea în acest fel a pistoanelor are marele avantaj de a reduce mult gabaritul pompei şi a obţine în acelaşi timp un moment de inerţie constant, prin simetria maselor de rotaţie, ceea ce permite funcţionarea acestora la viteze unghiulare mult superioare altor tipuri. Având în vedere aceste calităţi, la care se adaugă o bună stabilitate a mişcării la turaţii joase, precum şi uşurinţa reglării volumului activ, se acordă prioritate acestora, fiind cele mai răspândite tipuri de maşini volumice utilizate în acţionarea hidraulica, lucru valabil şi pentru sistemele de acţionare a maşinilor-unelte. Parametri principali ai acestor tipuri de pompe sunt: presiuni cuprinse între 150 şi 500 de bar şi chiar mai mari, momente până la 800 – 900 daN m, puteri până la 3500 kW, debite până la 900 l/min, turaţii maxime la pompe până la 3000 – 4000 rot/min.
2.6 Motoare hidraulice
Motoarele hidraulice retransformă energia potenţială a lichidului primită de la generator în energie mecanică cu care acţionează apoi elementul final în mişcare de rotaţie, de translaţie sau oscilantă (alternativă). Deci, forma acestor motoare va fi, după traiectoria mişcării pe care o realizează:
1) circulare (rotative)2) liniare (rectilinii)3) oscilante (alternative)
2.7 Motoare circulare (rotative)
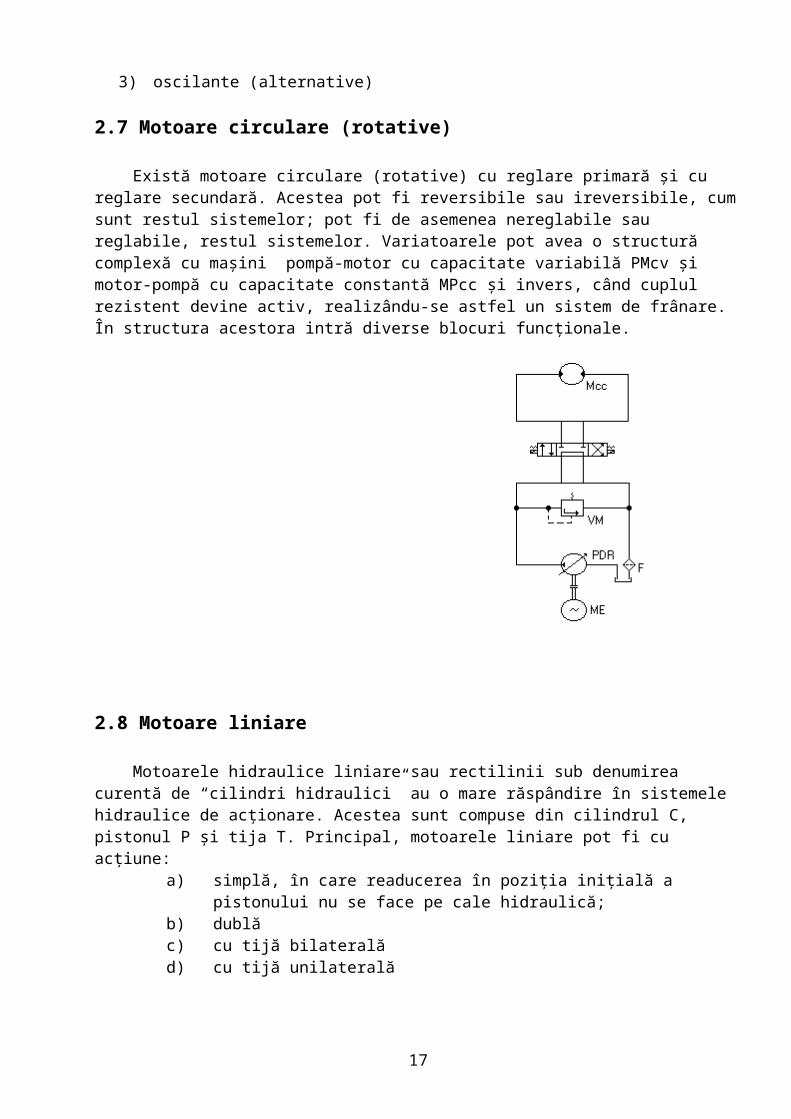
Există motoare circulare (rotative) cu reglare primară şi cu reglare secundară. Acestea pot fi reversibile sau ireversibile, cum sunt restul sistemelor; pot fi de asemenea nereglabile sau reglabile, restul sistemelor. Variatoarele pot avea o structură complexă cu maşini pompă-motor cu capacitate variabilă PMcv şi motor-pompă cu capacitate constantă MPcc şi invers, când cuplul rezistent devine activ, realizându-se astfel un sistem de frânare. În structura acestora intră diverse blocuri funcţionale.
12
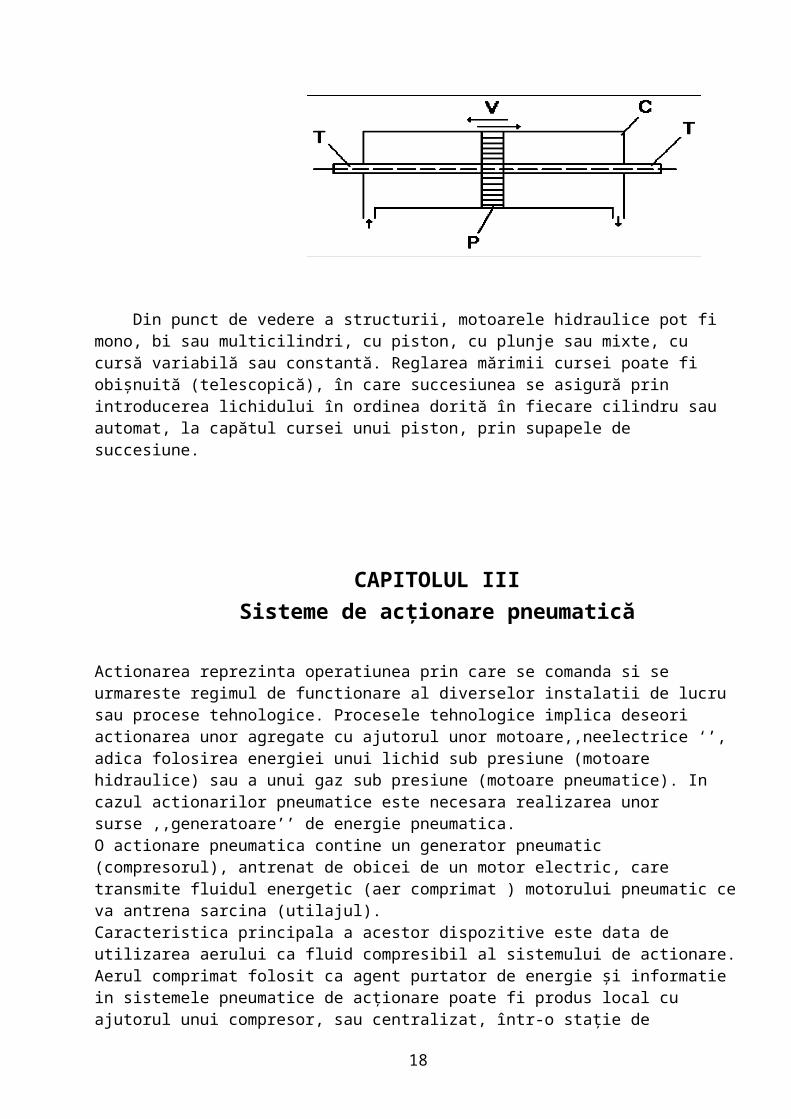
2.8 Motoare liniare Motoarele hidraulice liniare sau rectilinii sub denumirea curentă de “cilindri hidraulici” au o mare răspândire în sistemele hidraulice de acţionare. Acestea sunt compuse din cilindrul C, pistonul P şi tija T. Principal, motoarele liniare pot fi cu acţiune:
a) simplă, în care readucerea în poziţia iniţială a pistonului nu se face pe cale hidraulică;
b) dublăc) cu tijă bilateralăd) cu tijă unilaterală
Din punct de vedere a structurii, motoarele hidraulice pot fi mono, bi sau multicilindri, cu piston, cu plunje sau mixte, cu cursă variabilă sau constantă. Reglarea mărimii cursei poate fi obişnuită (telescopică), în care succesiunea se asigură prin introducerea lichidului în ordinea dorită în fiecare cilindru sau automat, la capătul cursei unui piston, prin supapele de succesiune.
CAPITOLUL III13
Sisteme de acţionare pneumatică
Actionarea reprezinta operatiunea prin care se comanda si se urmareste regimul de functionare al diverselor instalatii de lucru sau procese tehnologice. Procesele tehnologice implica deseori actionarea unor agregate cu ajutorul unor motoare,,neelectrice ‘’, adica folosirea energiei unui lichid sub presiune (motoare hidraulice) sau a unui gaz sub presiune (motoare pneumatice). In cazul actionarilor pneumatice este necesara realizarea unor surse ,,generatoare’’ de energie pneumatica.O actionare pneumatica contine un generator pneumatic (compresorul), antrenat de obicei de un motor electric, care transmite fluidul energetic (aer comprimat ) motorului pneumatic ce va antrena sarcina (utilajul).Caracteristica principala a acestor dispozitive este data de utilizarea aerului ca fluid compresibil al sistemului de actionare.Aerul comprimat folosit ca agent purtator de energie şi informatie in sistemele pneumatice de acţionare poate fi produs local cu ajutorul unui compresor, sau centralizat, într-o staţie de compresoare. Ultima variantă este cea mai utilizata. De altfel , producerea aerului comprimat este unul dintre serviciile de baza (alaturi de alimentarea cu energie electrica, apa, gaze naturale) de care dispune un stabiliment modern.Acţionarile pneumatice si-au gasit aplicatii în domenii ale tehnicii extreme de variate, pentru cele mai diferite scopuri. Acest fapt se datoreaza avantajelor prezentate de aceste acţionari :- datorita vitezelor de lucru şi de avans mari, precum şi momentelor de inerţiemici, durata operaţiilor este mică.- acţionarile pneumatice pot fi foarte rapide : utilizand elemente logice sau convertoare electropneumatice se pot realiza instalaţii cu funcţioanre în ciclu automat, care oferăaproductivitate mare .- forţele, momentele şi vitezele motoarelor pot fi reglate uşor, utilizand dispozitivesimple ;- supraincarcarea motoarelor pneumatice nu introduce pericol de avarii- transmisiile pneumatice permit porniri, opriri, opriri dese si schimbari de sens bruste, fara pericol de avarie ;- aerul comprimat este relativ usor de produs şi de transportat prin reţele este nepoluant si neinflamabil.- poate fi stocat în cantitati apreciabile;- pericolul de accidentare este redus;- intreţinerea instalatiilor pneumatice este usoara daca se dispune de personal calificat.In comparaţie cu alte tipuri de acţionari (hidraulice, electice) acţionarile pneumatice prezinta urmatoarele dezavantaje ;- datorita limitarii presiunii de lucru forţele şi momentele oferite de motoarele pneumatice sunt reduse ;- compresibilitatea aerului nu permite reglarea precisa a unor parametri de funcţionare, de exemplu menţinerea constanta a unor viteze mici de deplasare.- aerul nu poate fi complet purificat cu costuri rezonabile, fapt ce duce la uzura unor piese prin eroziune şi abraziune precum si la coroziunea componentelor ;- in anumite conditii de mediu si functionare, exista pericol de inghet ;- randamentul transmisiilor pneumatice este scazut.Acţionarile pneumatice sunt utilizate : in industrie cu pericolul de incendii, explozii : metalurgie, chimie, minerit, prelucrarea lemnului, termocentrale.
3.1 Schema pneumatica este reprezentarea grafica, obtinuta prin utilizarea de simboluri si reguli de reprezentare a unui sistem pneumatic si descrie cu acuratete functionarea acestuia. Elaborarea schemei pneumatice este al doilea pas facut in proiectarea unui sistem pneumatic si, odata ce utilajul a fost realizat, este unul din instrumentele de baza pentru operatiunile depunere in functiune, reglare a parametrilor de functionare, diagnosticare si reparare.
14
Schema pneumatica poate fi privita ca o structura formata din cinci nivele , fiecare etaj continand o anumita categorie de elemente pneumatice. Toate elementele din schema sunt interconectate astfel incat sa realizeze functiile cerute de utilizator. Cele cinci nivele cuprind :● Elemente de preparare aer, care asigura alimentarea instalatiei cu energie pneumatica la parametri ceruti din sistem:presiune, debit, filtrare, ungere.● Elemente de comanda, care permit dialogul om-masina : comenzi depornire -oprire, selectare pentru diferite functii sau moduri de lucru. De obicei, toate aceste elemente sunt grupate intr-un panou (tablou) de comanda, aflat la distanta sau alipit instalatiei de forta (de executie).● Elemente de procesare - echipamente care asigura procesarea (interpretarea si distribuirea) semnalelor primite in instalatie, atat a celor decomanda, provenite de la tabloul de comanda, cat si a celor de reactie, caresunt de obicei semnalele ce ofera informatii despre starea masinii si/sau aprocesului tehnologic desfasurat. Elementele de procesare prelucreaza toate aceste semnale fie unitar, fie in anumite combinatii, realizand diferite functiilogice:NU, SI, SAU, EXCLUSIV, temporizare, memorare.• Elemente de comanda finala - sunt echipamente de distributie a energiei pneumatice si reprezinta un etaj de amplificare a energiei, prin caresemnalele de comanda sunt “injectate” direct elementelor de executie :motoare liniare, rotative, oscilante, generatoare de vacuum cu ventuze,manipulatoare.● Elemente de executie (actuatoare pneumatice) - sunt echipamente careconvertesc energia de presiune a agentului de lucru (aer) in energiemecanica (forte, moment) pentru efectuarea de lucru mecanic (miscare).In afara de aceste cinci nivele de baza se mai pot identifica inca doua, numai putin importante:● Elemente de conexiune (furtune, tevi, conectori) cu care se construiestereteaua de aer comprimat ce leaga aparatele pneumatic intre ele.● Matricea mecanica, adica toate acele accesorii mecanice cu care se asambleaza mecanic cilindrii pneumatici in interiorul unei instalatii.
3.2 Clasificarea sistemelor pneumatice:Dupa tipul etajului de comanda:a) schema pur pneumatica : semnalele de comanda sunt numai pneumatice;b) schema electro-pneumatica : semnalele de comanda sunt electrice. dupa tipul elementelor de comanda, schemele de comanda electro -pneumatice sunt de patru tipuri : cu releu, cu placi electronice imprimate, cu microprocesor (automate programabile, calculatoare), mixte.Dupa tipul de functionare impuse de etajul de comanda:a) scheme conduse dupa timp : intr-o instalatie pneumatica, elementele de executie se misca intr-o anumita ordine, descrisa cu ajutorul unui instrument grafic numit Ciclograma sau Diagrama de miscare;b) scheme condusa dupa spatiu : la aceste scheme, un nou semnal decomanda este generat numai dupa ce, in urma unei verificari interne, se confirma ca s-a executat corect miscarea sau procesul precedent.Verificariile se fac cu ajutorul senzorilor sau al traductoarelor.c) scheme mixte : sunt des intalnite in practica si imbina avantajele oferitede tipurile discutate mai sus.Dupa tipul circuitelor din schema:a) cu un circuit comun pentru etajul de comanda si cel de forta ;b) cu doua circuite pentru etajul de comanda si cel de forta
3.3 Reprezentarea sistemelor de actionare pneumatica
15
In Tabelul 1.1 sunt prezentate notaţiile conexiunilor pneumatic ale aparatelor. Exista doua
tipuri de notare: numerica si literala. Notatia numeric este mai noua si tinde sa o inlocuiasca, treptat,
pe cea literala. In practica poate fi intalnita una din cele doua tipuri de notare dar, de cele mai multe
ori, se intalnesc ambele.
Limbajul tehnic presupune si utilizarea, de comun acord, conform unor standarde
internaţionale, a unor simboluri care sa permita reprezentarea si identificarea usoara a aparatelor si
componentelor electrice, pneumatice sau hidraulice atat ca elemente singulare, cat si inglobate în
sisteme (circuite).
Simbolurile pneumatice trebuie sa ofere informaţii privind: functia (functiile)
aparatului, notarea conexiunilor, metodele de acţionare, parametrii admisibili ai agentului de
comandă si de lucru. Deoarece, la prima vedere, simbolizarea distribuitoarelor pare sa fie mai
dificila, se va detalia modul de reprezentare si identificare a acestor aparate.
Simbolurile folosite in reprezentarea elementelor pneumatice trebuie sa indeplineasca
urmatoarele caracteristici:
• Functia
• Metoda de actionare si de revenire la starea initiala
• Numarul de conexiuni(orificii)
• Numarul de pozitii de comutare
• Principiul general de operare
• Reprezentare simplificata a fluxului de aer .
16
Simbolurile nu reprezinta urmatoarele caracteristici:
• Marimea sau dimensiunea componentelor
• Particularitati ale producatorilor, metode de constructie sau costuri
• Detalii fizice ale elementelor
• Imbinari sau conexiuni altele decatjonctiunile intre “porturi”
3.4 Exemple de elemente pneumatice:
Echipamente de preparare aer comprimat:
- Filtru cu purjare manuala
- Filtru cu purjare automata
-Regulator de presiune
-Unitate preparare aer : filtru, regulator, manometru, ungator
Actuatori pneumatic- cilindri pneumatic:
- Cilindru cu dubla actiune
- Cilindru cu simpla actiune 3.5 Structura unei scheme pneumatice
17
Schema pneumatica poate fi privita ca o structura formata din 5 nivele (figura 1) fiecare etaj
continand o anumita categorie de elemente pneumatice. Toate elementele din schema sunt
interconectate astfel incat sa realizeze functiile cerute de utilizator.
Figura 1: Structura unei scheme pneumatice
1) Elementele care asigura alimentarea instalației cu energie pneumatica la parametrii ceruti
de sistem: presiune, debit, filtrare, ungere.
2) Elementele de comanda, care permit dialogul om-mașină: comenzi de pornire-oprire,
selectare pentru diferite funcții sau moduri de lucru, etc. De obicei, toate aceste elemente sunt
grupate într-un panou de comanda, alipit instalatiei.
3) Elementele de procesare: sunt echipamentele care asigura procesarea (interpretarea si
distribuirea) semnalelor primite in instalatie: atat a celor de comanda, provenite de la tabloul de
comanda, cat si a celor de reactie, care sunt de obicei semnale ce oferă informatii despre starea
masinii si/sau a procesului tehnologic desfasurat. Elementele de procesare prelucreaza toate aceste
semnale fie unitar, fie în anumite combinatii, realizand diferite functii logice.
4) Elementele de comanda finala: sunt echipamente de distributie a energiei pneumatice si
reprezinta etajul din care semnalele de comanda sunt injectate direct elementelor de executie:
motoare liniare, rotative, oscilante, unitati de vidare, etc.
5) Elementele de executie: sunt echipamente care convertesc energia de presiune a aerului
comprimat în energie mecanică pentru efectuarea lucrului mecanic.
18
Figura 2: Schema pneumatic structurata pe nivele
BIBLIOGRAFIE
[1] Drighiciu, M., Manolea, Gh., Acţionări hidraulice Aplicaţii, Reprografia Universităţii din Craiova, 2001[2] Avram, M., Acţionări hidraulice şi pneumatice, Editura Universitară, Bucureşti, 2005[3] Stan, S., ş.a., Pneumatică aplicată, S.C. Festo SRL, Bucureşti, 2000[4] Roboţi industriali. Sisteme de acţionare, curs pe site-ul http://www.scritube.com sau http://www.robotics.ucv.ro/master[5] Dolga, V., Sisteme de acţionare II, pe site-ul Universităţii Politehnica din Timişoara, Facultatea de Mecanică, Departamentul de Mecatronică[6] Ivănescu M. Roboţi industriali, Editura Universitaria, 1994[7] http://ksawa.es[8] http://d2.static.dvidshub.net/media[9]. Initiere in Internet, e-mail si chat, Editura Arves, Craiova, 2002
19
20





























