Embed Size (px)
Citation preview
Sistemi di supervisione e controllo - Schemi di controllo e PID 1/52
Sistemi di Supervisione e ControlloSistemi di Supervisione e Controllo
Argomento - Il controllo di processo: I PID
Docente - Prof. Elio [email protected] di Ingegneria Elettrica ed ElettronicaUniversità di Cagliari
Sistemi di supervisione e controllo - Schemi di controllo e PID 2/52
SommarioSommario
Progetto Noè - Sistemi di telegestione e telecontrollo – Il controllo di processo: i PID – Febbraio 2008
•Gli schemi di controllo
• I regolatori industriali
• La taratura dei regolatori industriali
• Configurazione anti wind-up
• Azione derivatrice sull’uscita
• Predittore di Smith
Sistemi di supervisione e controllo - Schemi di controllo e PID 3/52
Riferimenti bibliografici
Paolo BOLZERN, Riccardo SCATTOLINI, Nicola SCHIAVONIFondamenti di controlli automatici – seconda edizioneMcGraw-Hill, Milano
GianAntonio MAGNANI, Gianni FERRETTI, Paolo ROCCOTecnologie dei sistemi di controllo – seconda edizioneMcGraw-Hill, Milano
Massimiliano VERONESIRegolazione PID – Fondamenti teorici, tecniche di taratura, applicazioni di controlloFranco Angeli
Sistemi di supervisione e controllo - Schemi di controllo e PID 4/52
Gli schemi di controllo
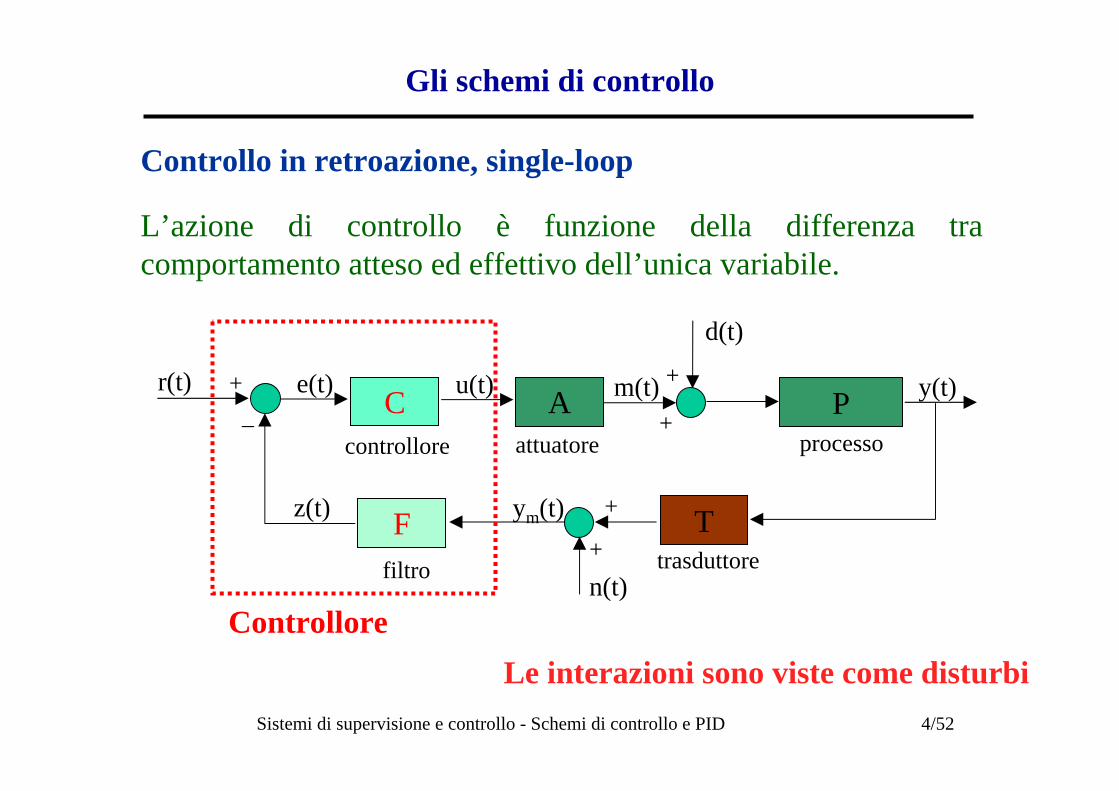
Controllo in retroazione, single-loop
L’azione di controllo è funzione della differenza tra comportamento atteso ed effettivo dell’unica variabile.
Le interazioni sono viste come disturbi
Aattuatore
Pprocesso
Ccontrollore
Ttrasduttore
+
+
+r(t) e(t) u(t) m(t)
d(t)
y(t)
ym(t)
_
Ffiltro
z(t)
Controllore
+
n(t)+
Sistemi di supervisione e controllo - Schemi di controllo e PID 5/52
Gli schemi di controllo
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )ωωωωω
ωωωωjFjTjPjAjC
jPjAjCjWr +=
1
( ) ( )( ) ( ) ( ) ( ) ( )ωωωωω
ωωjFjTjPjAjC
jPjWd +=
1
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )ωωωωω
ωωωωωjFjTjPjAjC
jPjAjCjFjWn +−=
1
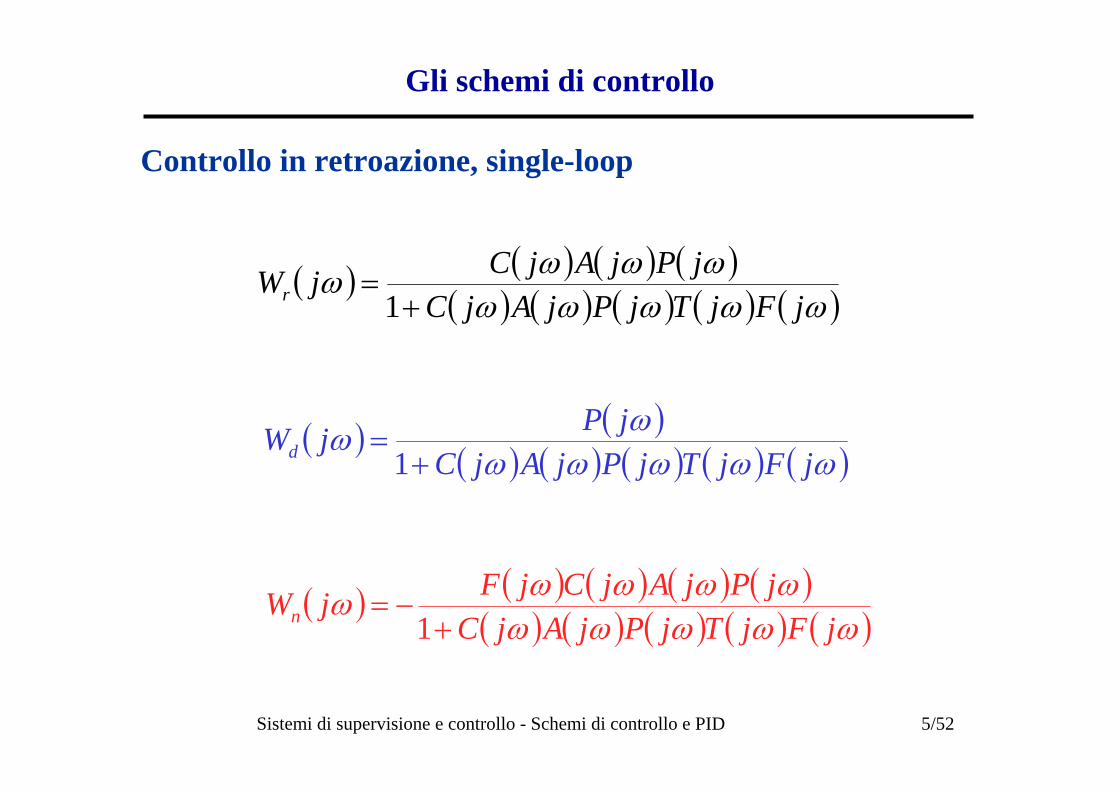
Controllo in retroazione, single-loop
Sistemi di supervisione e controllo - Schemi di controllo e PID 6/52
Gli schemi di controllo
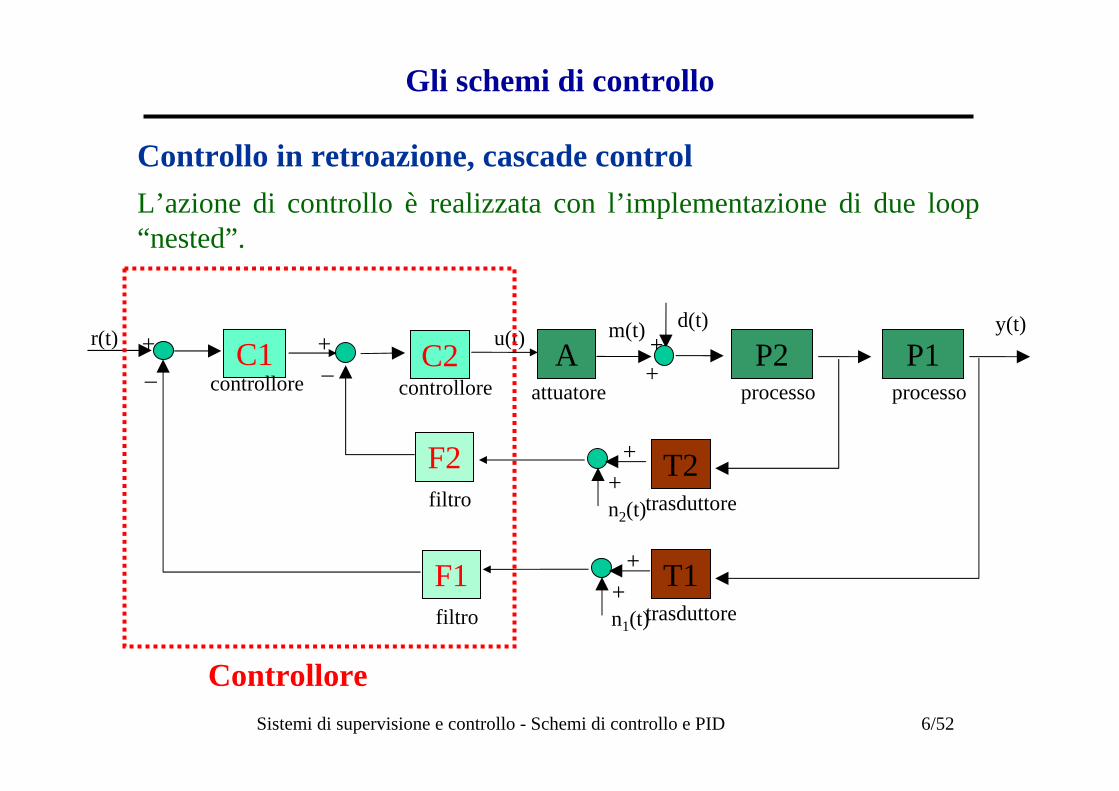
Controllo in retroazione, cascade controlL’azione di controllo è realizzata con l’implementazione di due loop“nested”.
Aattuatore
P1processo
C1controllore
T1trasduttore
++
+r(t) u(t) m(t) d(t) y(t)
_
F2filtro
+
n2(t)+ T2
trasduttore
P2processo
C2controllore
+_
F1filtro
+
n1(t)+
Controllore
Sistemi di supervisione e controllo - Schemi di controllo e PID 7/52
Gli schemi di controllo
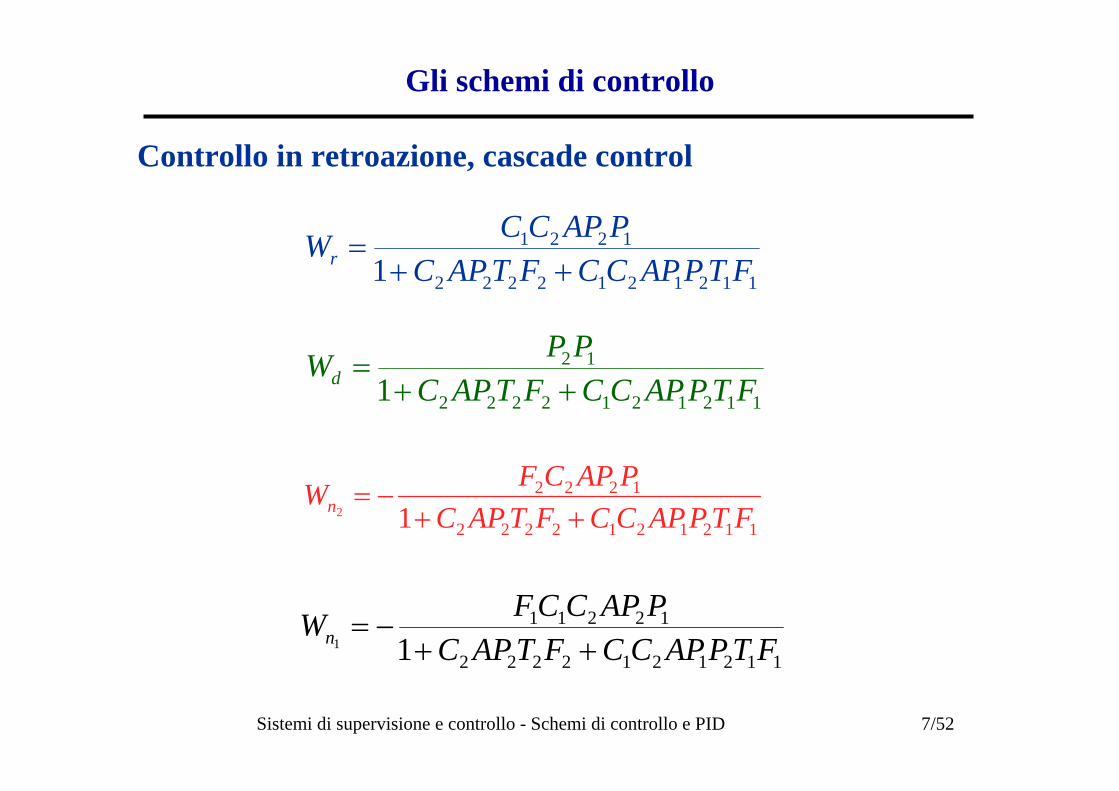
Controllo in retroazione, cascade control
1121212222
1221
1 FTPAPCCFTAPCPAPCCWr ++
=
1121212222
12
1 FTPAPCCFTAPCPPWd ++
=
1121212222
1222
12 FTPAPCCFTAPCPAPCFWn ++
−=
1121212222
12211
11 FTPAPCCFTAPCPAPCCFWn ++
−=
Sistemi di supervisione e controllo - Schemi di controllo e PID 8/52
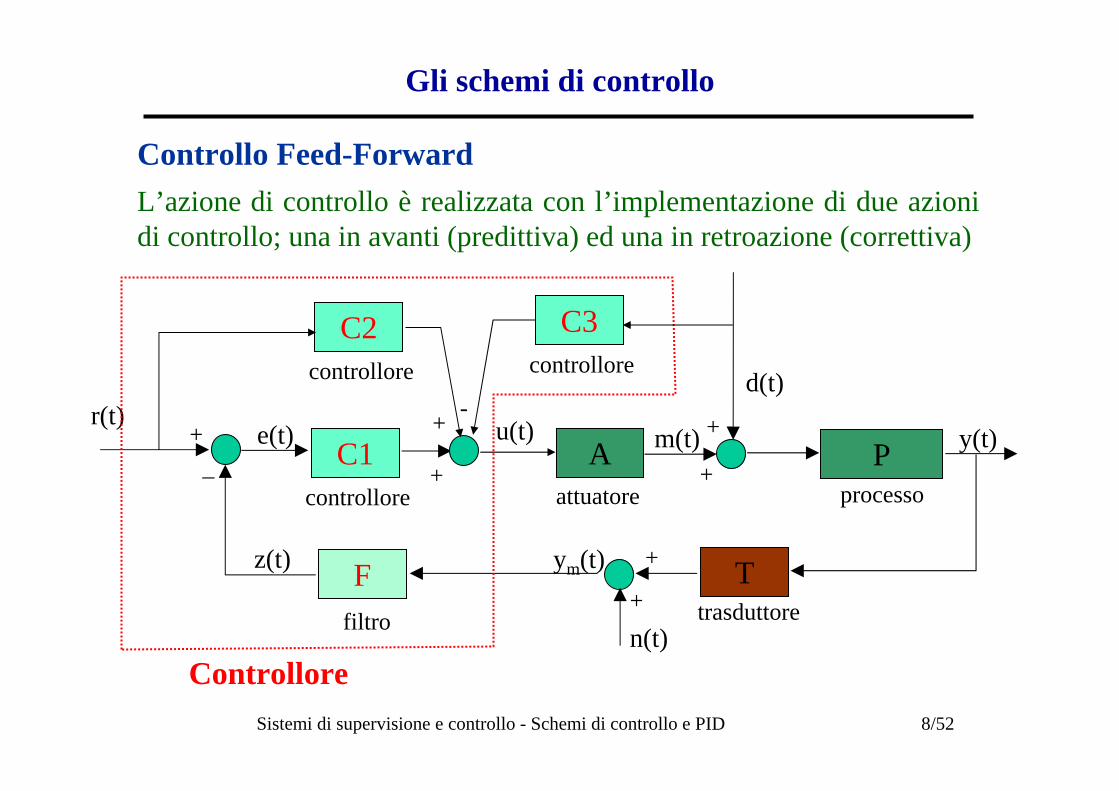
Gli schemi di controllo
Controllo Feed-ForwardL’azione di controllo è realizzata con l’implementazione di due azioni di controllo; una in avanti (predittiva) ed una in retroazione (correttiva)
Aattuatore
Pprocesso
C1controllore
Ttrasduttore
+
+
+r(t)
e(t) u(t) m(t)
d(t)
y(t)
ym(t)
_
Ffiltro
z(t)
Controllore
+
n(t)+
C2controllore
C3controllore
+
+ -
Sistemi di supervisione e controllo - Schemi di controllo e PID 9/52
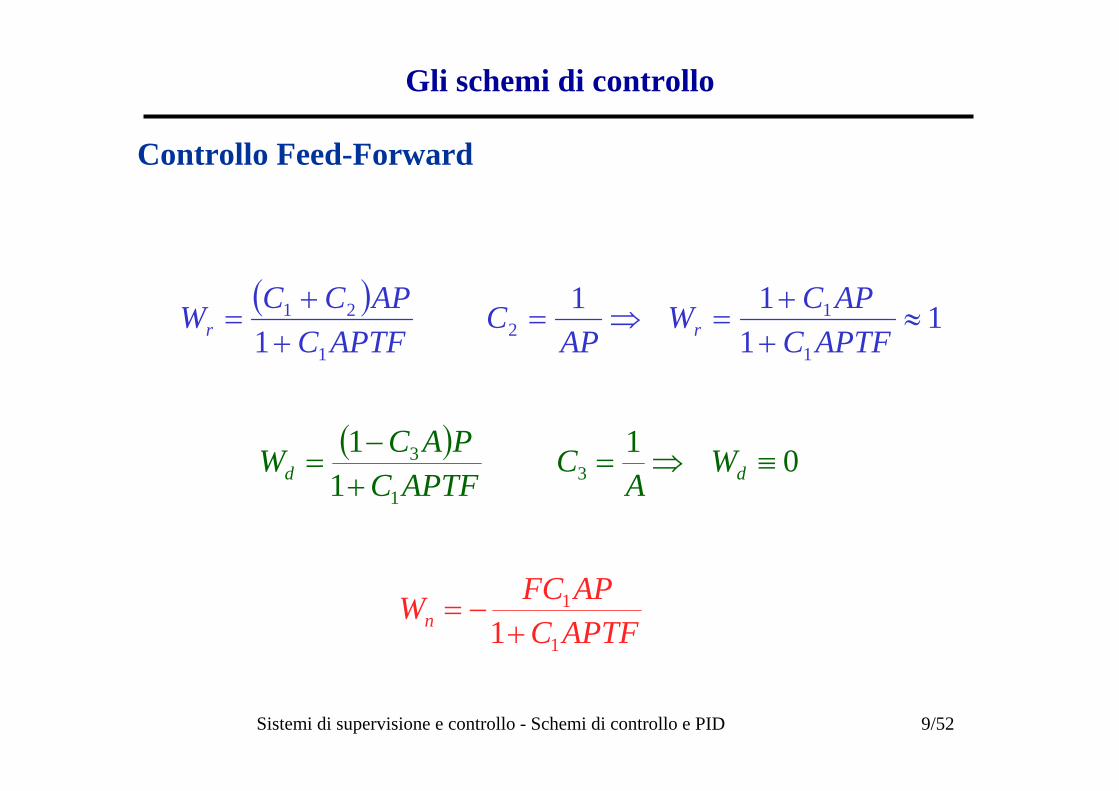
Gli schemi di controllo
Controllo Feed-Forward
( ) 11
111 1
12
1
21 ≈++
=⇒=++
=APTFC
APCWAP
CAPTFC
APCCW rr
( ) 011
13
1
3 ≡⇒=+−
= dd WA
CAPTFC
PACW
APTFCAPFCWn
1
1
1+−=
Sistemi di supervisione e controllo - Schemi di controllo e PID 10/52
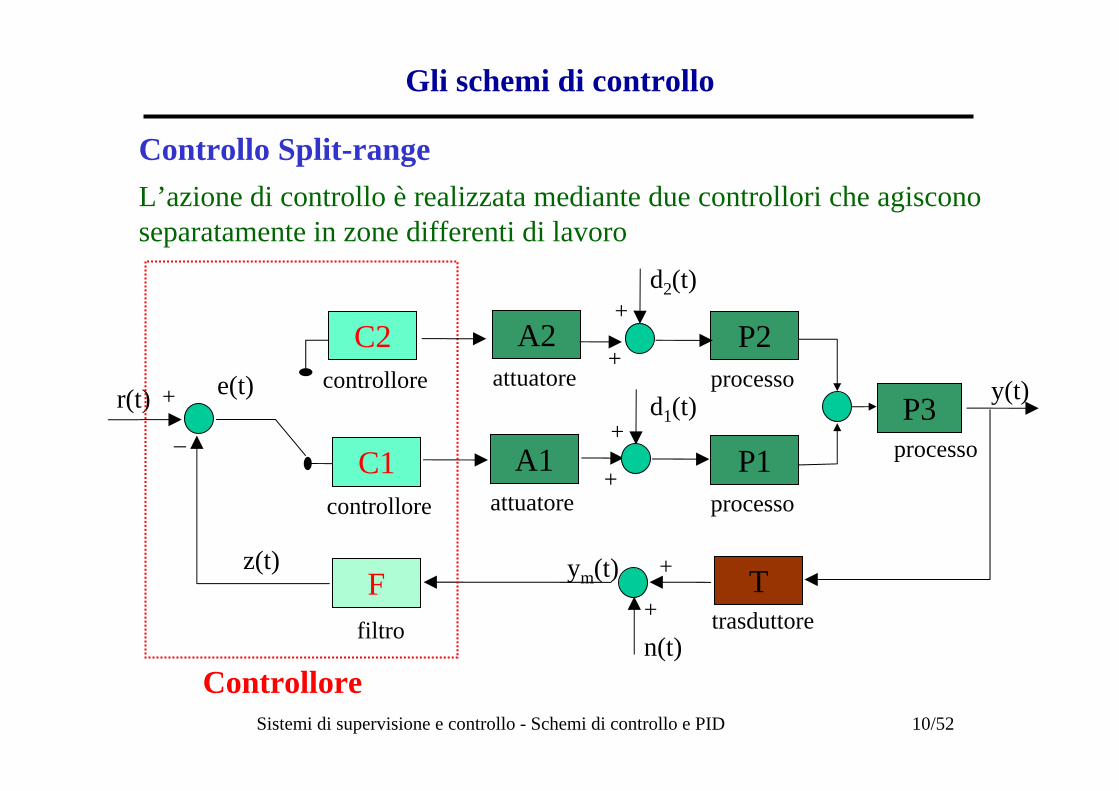
Gli schemi di controllo
Controllo Split-rangeL’azione di controllo è realizzata mediante due controllori che agiscono separatamente in zone differenti di lavoro
A1attuatore
P3processoC1
controllore
Ttrasduttore
+
++r(t) e(t)
d1(t)y(t)
ym(t)
_
Ffiltro
z(t)
Controllore
+
n(t)+
C2controllore
A2attuatore
P1processo
P2processo
+
+
d2(t)
Sistemi di supervisione e controllo - Schemi di controllo e PID 11/52
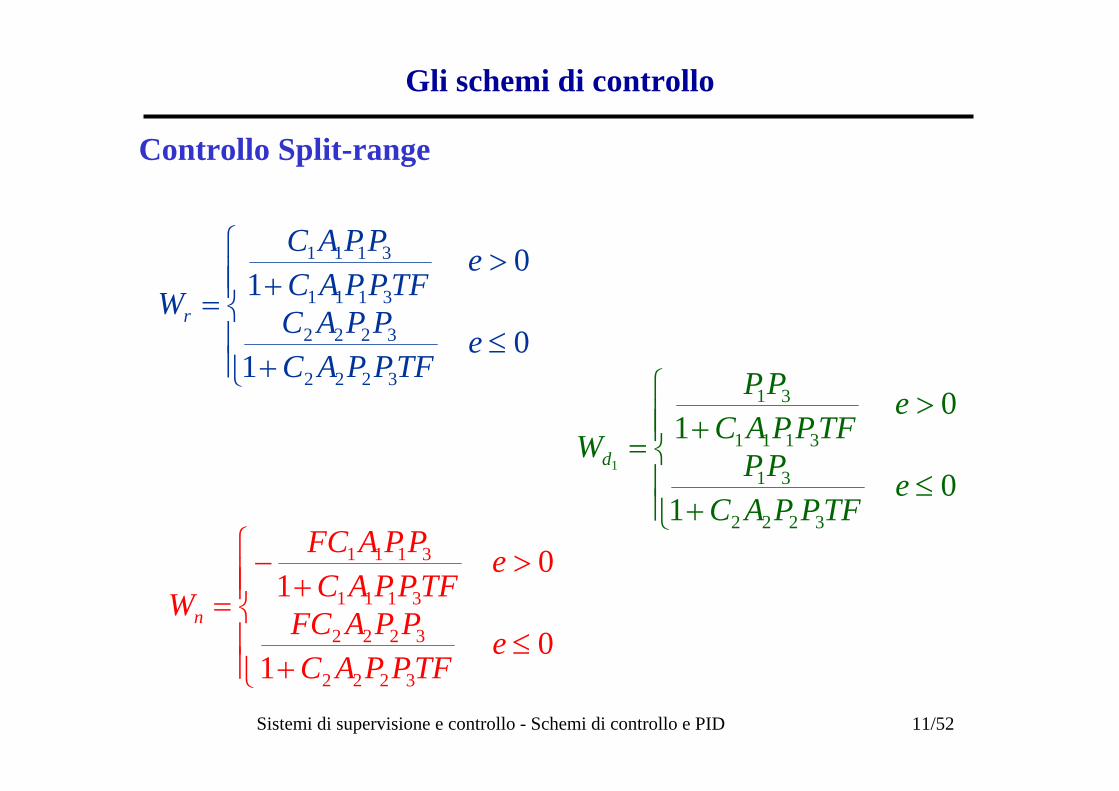
Gli schemi di controllo
Controllo Split-range
⎪⎪⎩
⎪⎪⎨
⎧
≤+
>+=
01
01
3222
3222
3111
3111
eTFPPAC
PPAC
eTFPPAC
PPAC
Wr
⎪⎪⎩
⎪⎪⎨
⎧
≤+
>+=
01
01
3222
31
3111
31
1
eTFPPAC
PP
eTFPPAC
PP
Wd
⎪⎪⎩
⎪⎪⎨
⎧
≤+
>+
−=
01
01
3222
3222
3111
3111
eTFPPAC
PPAFC
eTFPPAC
PPAFC
Wn
Sistemi di supervisione e controllo - Schemi di controllo e PID 12/52
Gli schemi di controllo
Controllo OverrideL’azione di controllo è realizzata normalmente sulla base di unavariabile di processo, ma se un’altra variabile entra in un campo critico l’azione si realizza sulla base di quest’ultima
Controllo di rapportoLe azioni di controllo sono effettuate sulla base del calcolo del rapporto tra due variabili di processo
Controllo Gain-schedulingIl controllore ha tarature dipendenti in funzione della zona di lavoro
Sistemi di supervisione e controllo - Schemi di controllo e PID 13/52
Gli schemi di controllo
Controllo adattativoIl controllore ha tarature dipendenti dai parametri del processo, che vengono stimati in linea
Controllo multivariabileLe azioni di controllo sulle variabili manipolabili dell’impianto vengono gestite in maniera coordinata
Controllo LQRIl controllore viene tarato per rendere minimo un indice di qualità. Caso specifico, lineare, del controllo ottimo
Sistemi di supervisione e controllo - Schemi di controllo e PID 14/52
Gli schemi di controllo
Predittore di SmithÈ un controllore che stima il ritardo di processo e lo compensa in modo che l’azione di controllo non ne risenta
Anti Wind-upStruttura di controllo che evita il fenomeno della carica integrale, presente ogni qual volta c’è un’azione di integrazione nel controllore
Controllo a relé Il controllore ha solo due stati che vengono selezionati sulla base di una funzione di commutazione
Sistemi di supervisione e controllo - Schemi di controllo e PID 15/52
I regolatori industriali
I regolatori industriali sono dei controllori a struttura fissa in cui l’uscita è una combinazione lineare di funzioni elementari del segnale in ingresso (l’errore)
Ce(t) u(t)
( ) ( ) ( ) ( )
( ) ( ) ( )tututudt
tdekdektektu
DIP
D
t
IP
++=
++= ∫
0
ττ
Sistemi di supervisione e controllo - Schemi di controllo e PID 16/52
I regolatori industriali
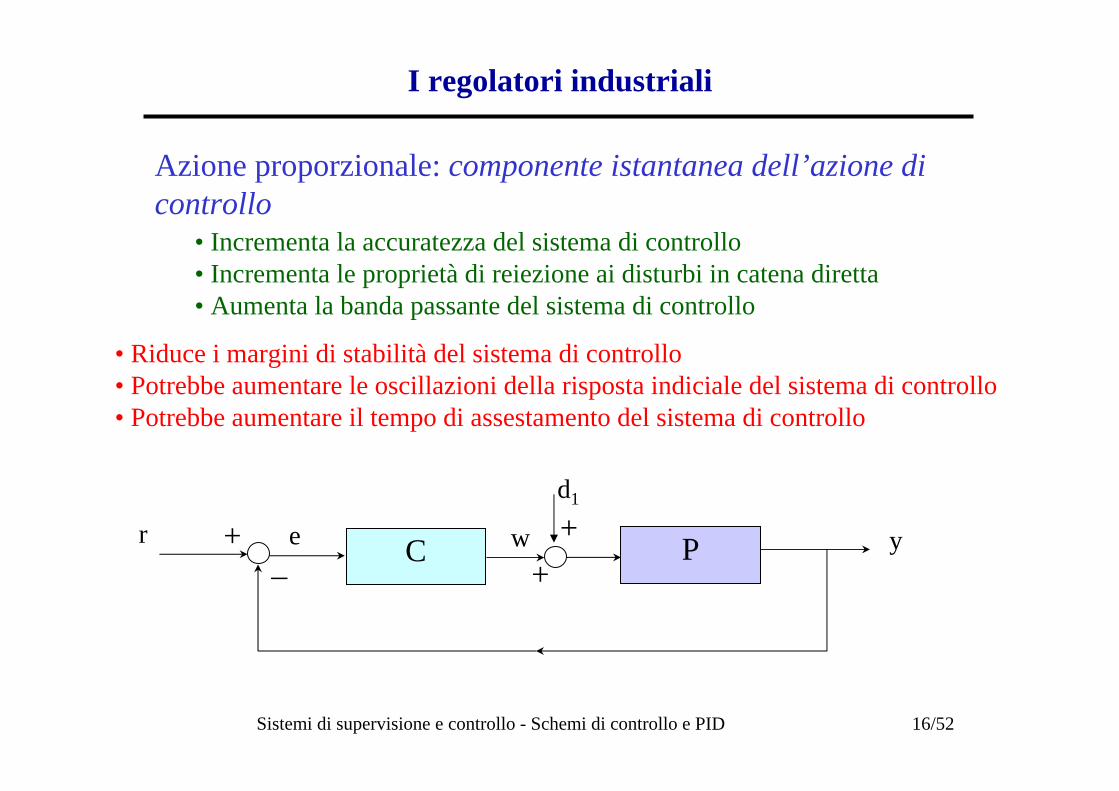
Azione proporzionale: componente istantanea dell’azione di controllo
• Incrementa la accuratezza del sistema di controllo• Incrementa le proprietà di reiezione ai disturbi in catena diretta• Aumenta la banda passante del sistema di controllo
• Riduce i margini di stabilità del sistema di controllo• Potrebbe aumentare le oscillazioni della risposta indiciale del sistema di controllo• Potrebbe aumentare il tempo di assestamento del sistema di controllo
C yr +_
e+
+P
d1
w
Sistemi di supervisione e controllo - Schemi di controllo e PID 17/52
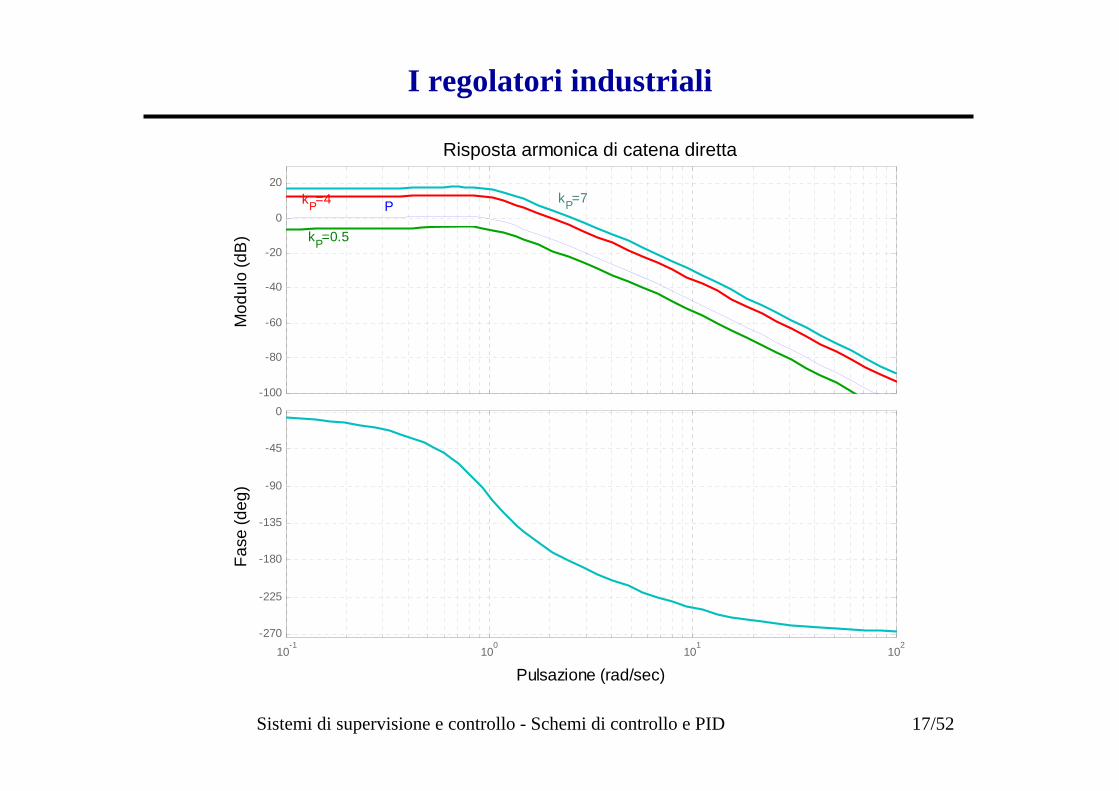
I regolatori industriali
Risposta armonica di catena diretta
Pulsazione (rad/sec)
Fase
(deg
)M
odul
o (d
B)
-100
-80
-60
-40
-20
0
20
10-1
100
101
102
-270
-225
-180
-135
-90
-45
0
P
kP=0.5
kP=4 kP=7
Sistemi di supervisione e controllo - Schemi di controllo e PID 18/52
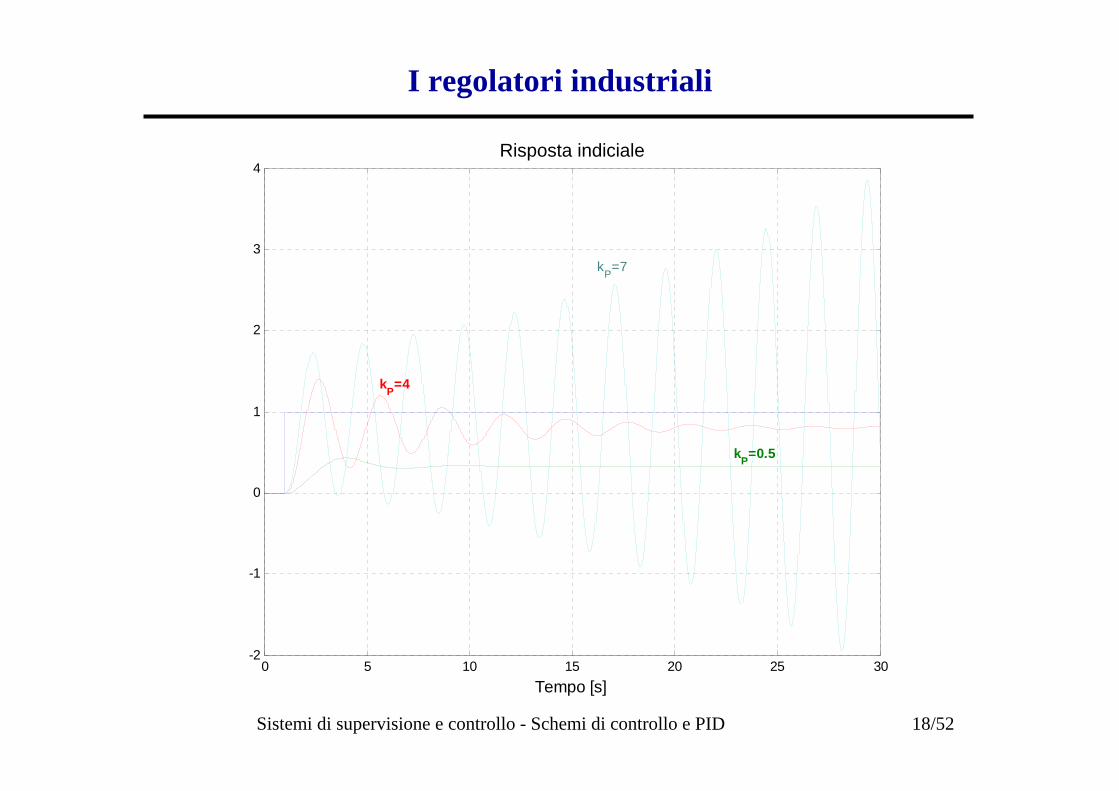
I regolatori industriali
0 5 10 15 20 25 30-2
-1
0
1
2
3
4Risposta indiciale
Tempo [s]
kP=7
kP=0.5
kP=4
Sistemi di supervisione e controllo - Schemi di controllo e PID 19/52
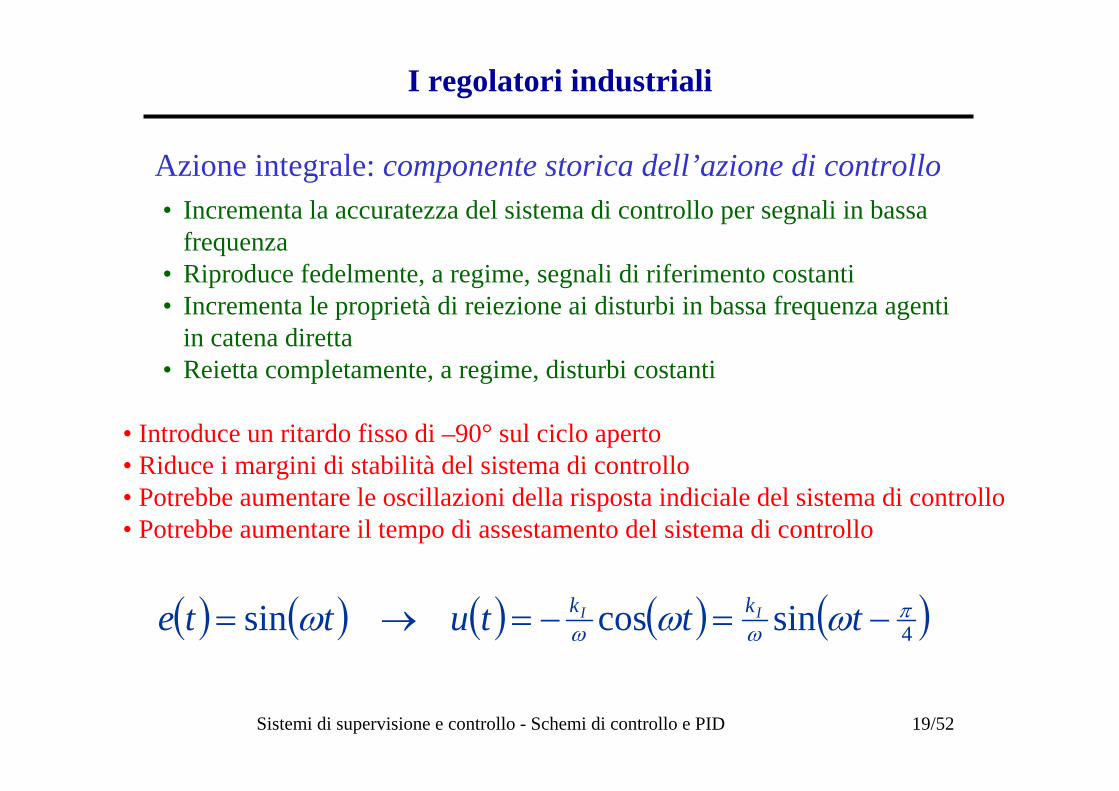
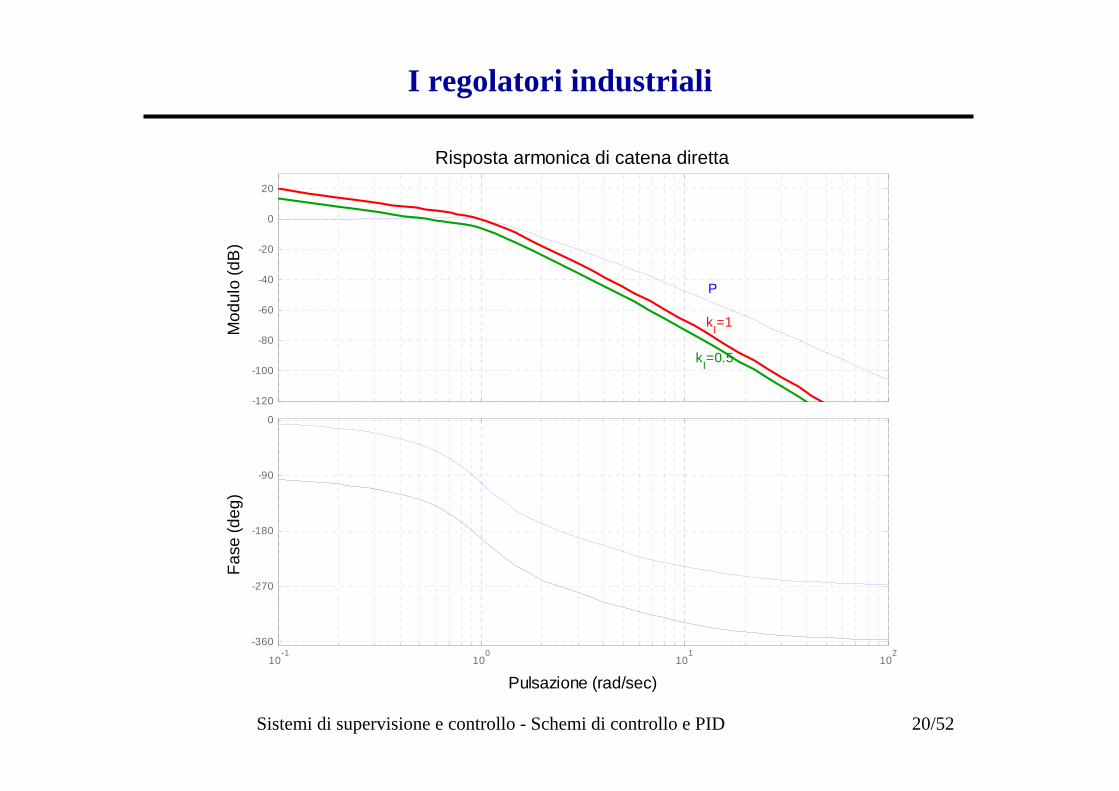
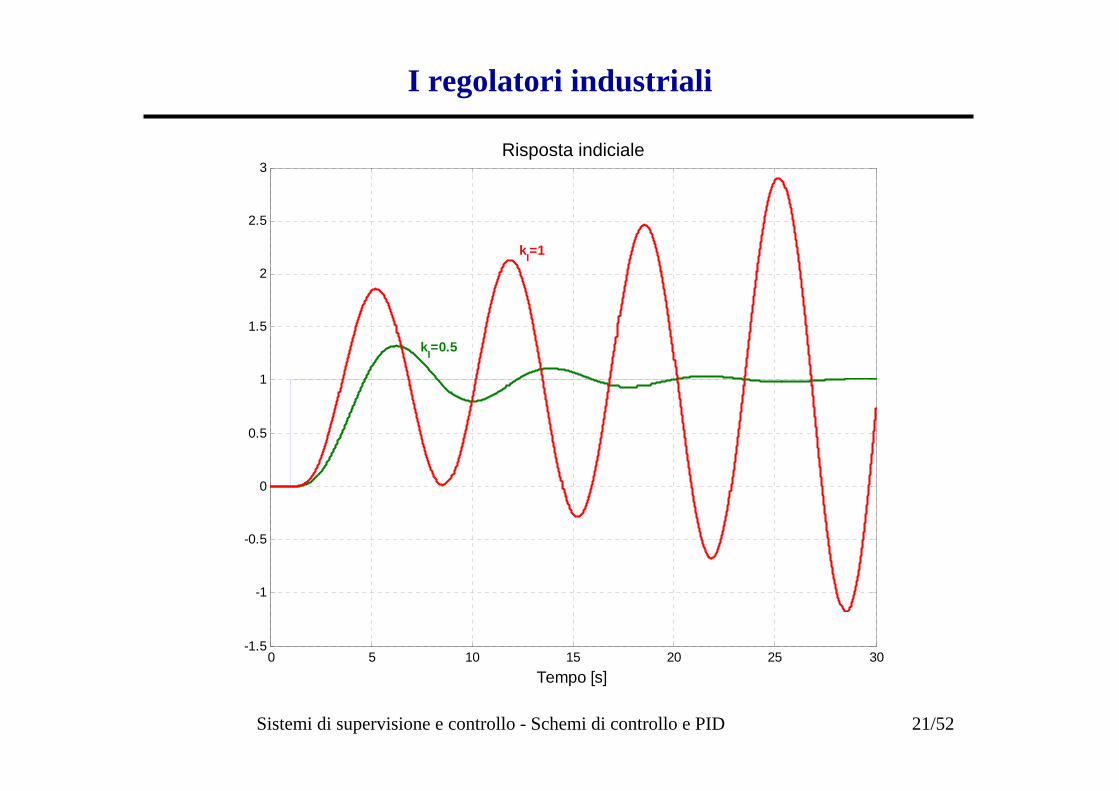
I regolatori industriali
Azione integrale: componente storica dell’azione di controllo• Incrementa la accuratezza del sistema di controllo per segnali in bassa
frequenza• Riproduce fedelmente, a regime, segnali di riferimento costanti• Incrementa le proprietà di reiezione ai disturbi in bassa frequenza agenti
in catena diretta• Reietta completamente, a regime, disturbi costanti
• Introduce un ritardo fisso di –90° sul ciclo aperto• Riduce i margini di stabilità del sistema di controllo• Potrebbe aumentare le oscillazioni della risposta indiciale del sistema di controllo• Potrebbe aumentare il tempo di assestamento del sistema di controllo
( ) ( ) ( ) ( ) ( )4sincossin πωω ωωω −=−=→= tttutte II kk
Sistemi di supervisione e controllo - Schemi di controllo e PID 20/52
I regolatori industriali
Risposta armonica di catena diretta
Pulsazione (rad/sec)
Fase
(deg
)M
odul
o (d
B)
-120
-100
-80
-60
-40
-20
0
20
10-1
100
101
102
-360
-270
-180
-90
0
P
kI=1
kI=0.5
Sistemi di supervisione e controllo - Schemi di controllo e PID 21/52
I regolatori industriali
0 5 10 15 20 25 30-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
Tempo [s]
Risposta indiciale
kI=1
kI=0.5
Sistemi di supervisione e controllo - Schemi di controllo e PID 22/52
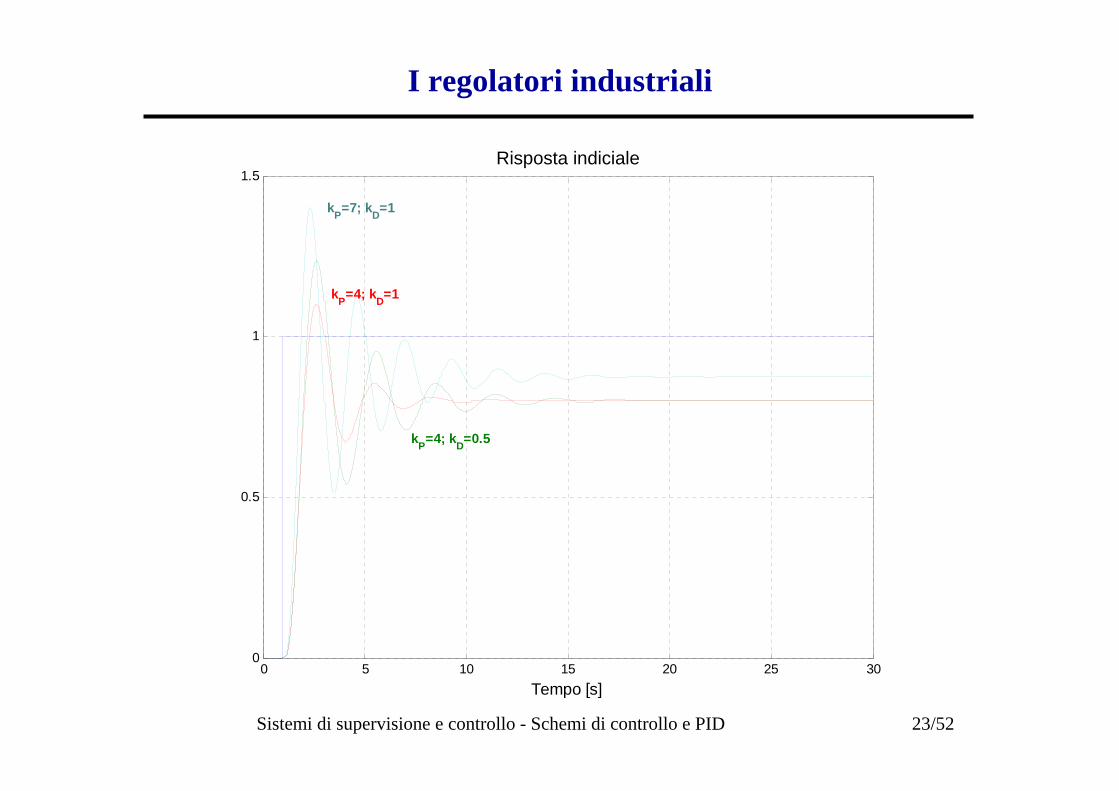
I regolatori industriali
Azione derivativa: componente anticipatrice dell’azione di controllo
• Introduce un anticipo fisso di 90°• Migliora i margini di stabilità• Riduce la sovraelongazione della risposta indiciale del sistema di
controllo• Riduce il tempo di assestamento del sistema di controllo
• Non utilizzabile singolarmente (non reagisce ad errori costanti anche grandi)• Aumenta la sensibilità al rumore di misura• Controllore non causale
( ) ( ) ( ) ( ) ( )4sincossin πωωωωω +==→= tktktutte DD
Sistemi di supervisione e controllo - Schemi di controllo e PID 23/52
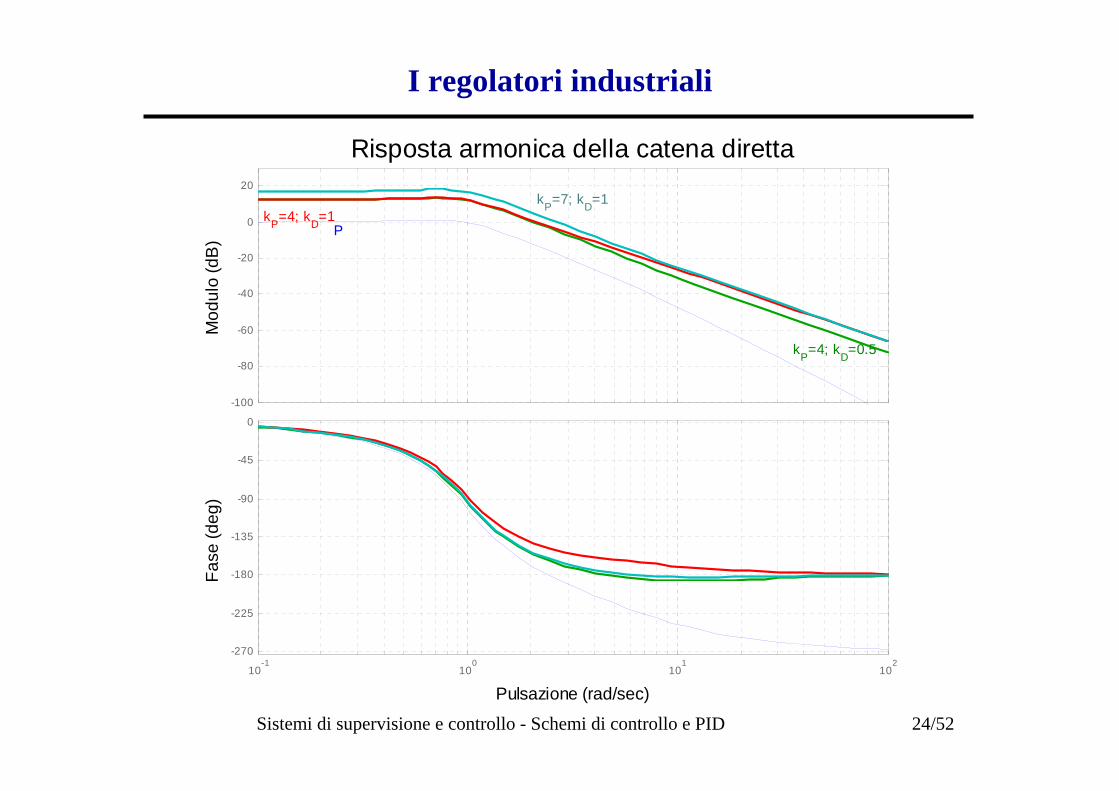
I regolatori industriali
0 5 10 15 20 25 300
0.5
1
1.5Risposta indiciale
Tempo [s]
kP=4; kD=0.5
kP=4; kD=1
kP=7; kD=1
Sistemi di supervisione e controllo - Schemi di controllo e PID 24/52
I regolatori industriali
Risposta armonica della catena diretta
Pulsazione (rad/sec)
Fase
(deg
)M
odul
o (d
B)
10-1
100
101
102
-270
-225
-180
-135
-90
-45
0
-100
-80
-60
-40
-20
0
20
kP=4; kD=0.5
P kP=4; kD=1
kP=7; kD=1
Sistemi di supervisione e controllo - Schemi di controllo e PID 25/52
I regolatori industriali
Azioni combinate: permettono di individuare il migliore compromesso tra i vantaggi e svantaggi di ogni singola componente• Migliora la accuratezza• Migliora la reiezione dei disturbi• Migliora i margini di stabilità• Riduce la sovraelongazione della risposta indiciale del sistema di
controllo• Riduce il tempo di assestamento del sistema di controllo• Aumenta la banda passante del sistema di controllo• Aumenta la prontezza della risposta indiciale
32.110
05.04
004
===
===
===
DIP
DIP
DIP
kkkPID
kkkPI
kkkP
Esempio di taratura
Sistemi di supervisione e controllo - Schemi di controllo e PID 26/52
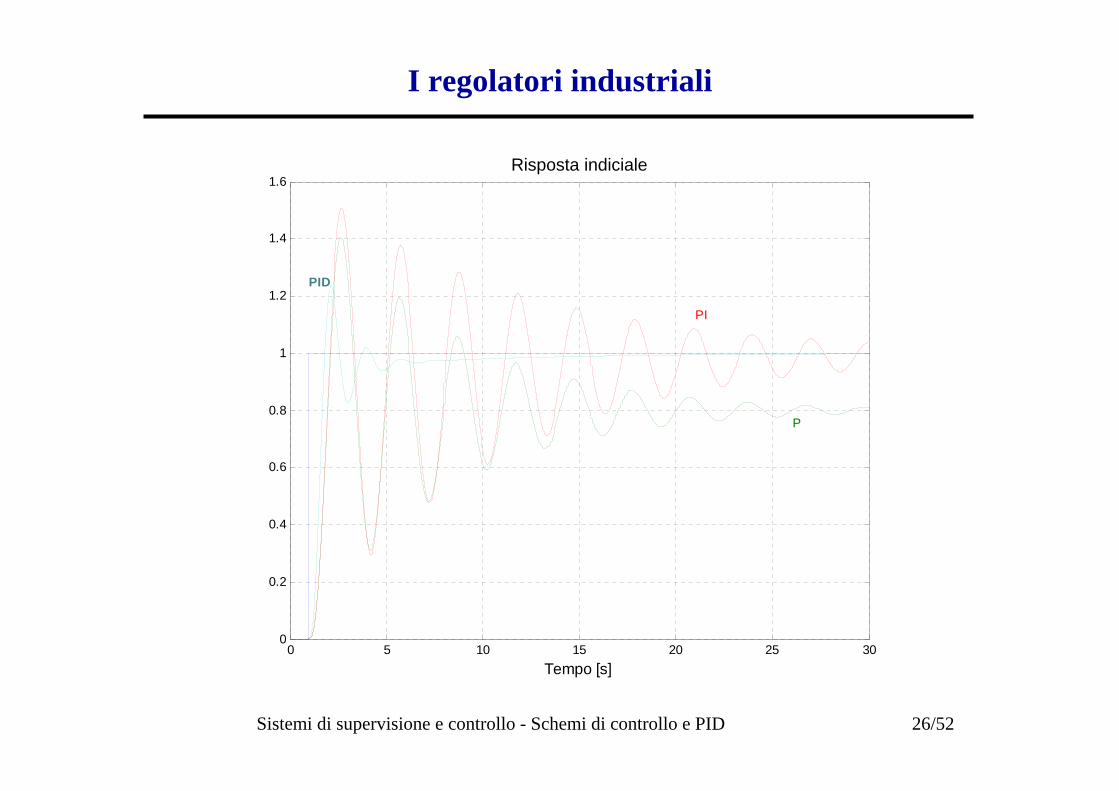
I regolatori industriali
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Tempo [s]
Risposta indiciale
P
PI
PID

Sistemi di supervisione e controllo - Schemi di controllo e PID 27/52
I regolatori industriali
Risposta armonica
Pulsazione(rad/sec)
Fase
(deg
)M
odul
o (d
B)
-100
-80
-60
-40
-20
0
20
40
10-2
10-1
100
101
102
-270
-225
-180
-135
-90
-45
0
Processo
P
PI
PID
Sistemi di supervisione e controllo - Schemi di controllo e PID 28/52
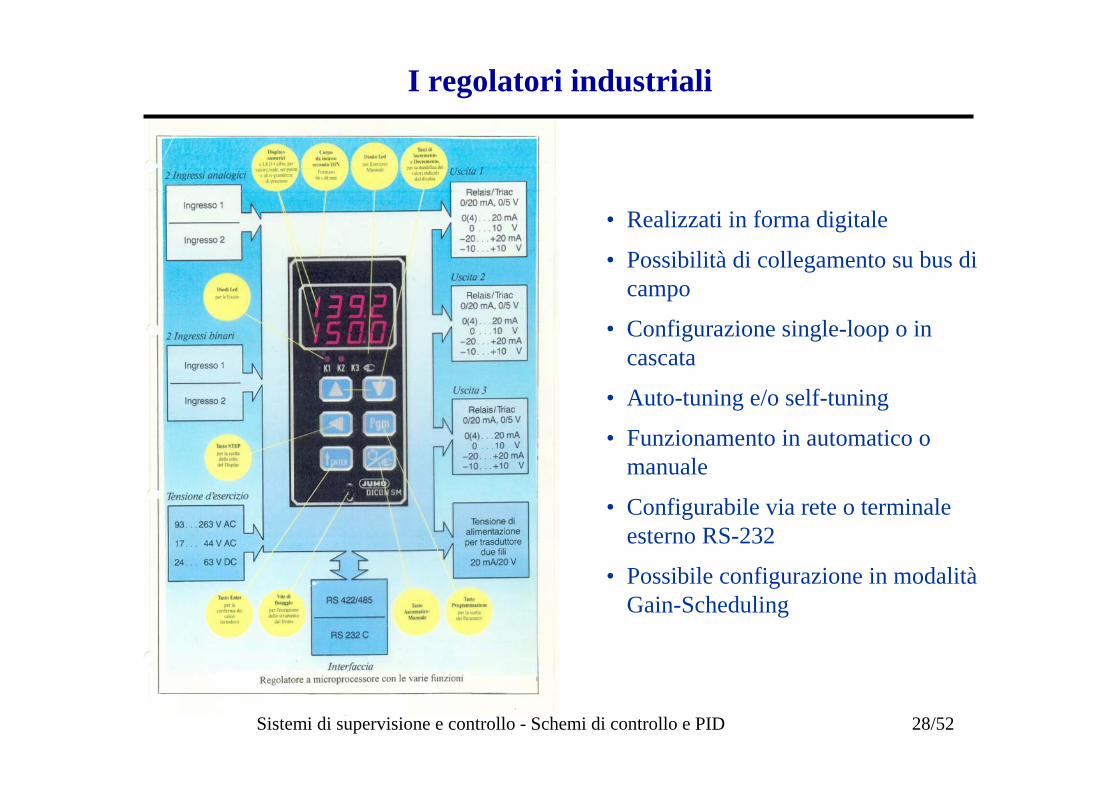
I regolatori industriali
• Realizzati in forma digitale
• Possibilità di collegamento su bus di campo
• Configurazione single-loop o in cascata
• Auto-tuning e/o self-tuning
• Funzionamento in automatico o manuale
• Configurabile via rete o terminale esterno RS-232
• Possibile configurazione in modalità Gain-Scheduling
Sistemi di supervisione e controllo - Schemi di controllo e PID 29/52
I regolatori industriali
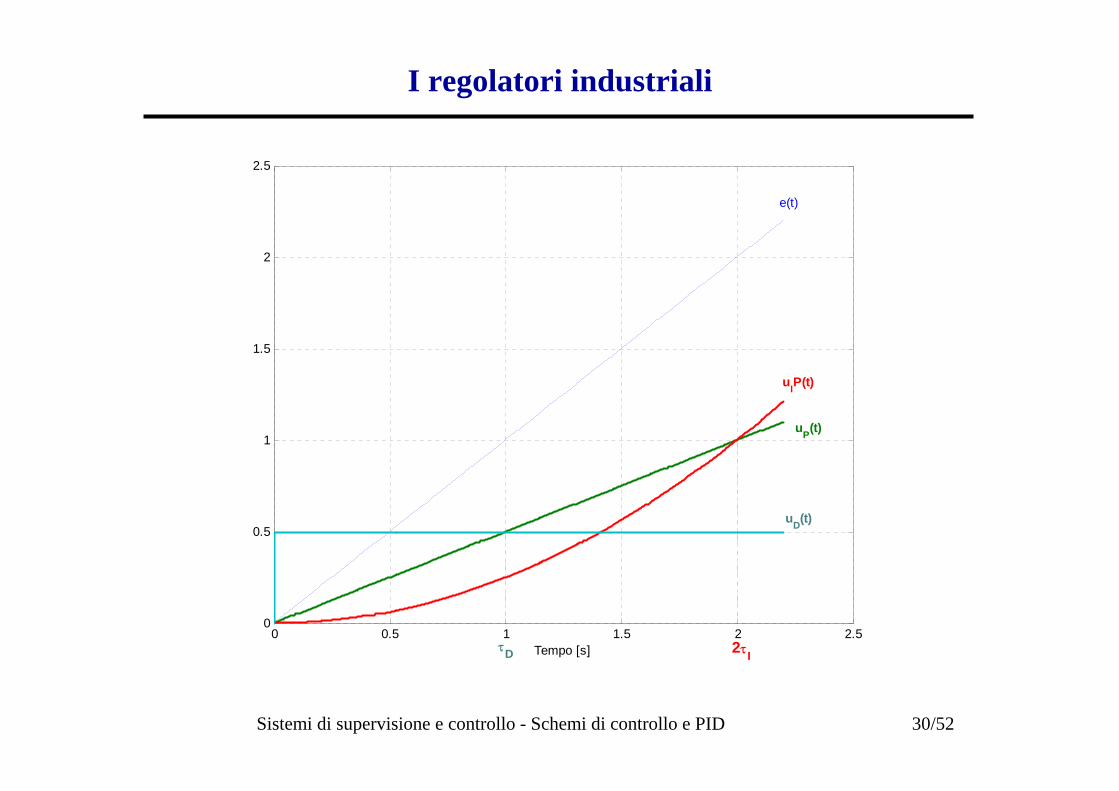
Parametri dei regolatori industriali
Banda proporzionale (BP): è l’inverso del guadagno dell’azione proporzionale. Indica il range entro cui un controllore/attuatore saturato si mantiene lineare
Tempo di anticipo (τD): indica la “durata” dell’effetto dell’azione derivativa
Tempo di intervento integrale (τI): indica il tempo di latenza dell’azione integrale
I
PI
P
DD
PP k
kkk
kB === ττ ;;1
Sistemi di supervisione e controllo - Schemi di controllo e PID 30/52
I regolatori industriali
0 0.5 1 1.5 2 2.50
0.5
1
1.5
2
2.5
Tempo [s]
e(t)
uP(t)
uD(t)
uIP(t)
τD 2τI
Sistemi di supervisione e controllo - Schemi di controllo e PID 31/52
La taratura dei regolatori industriali
La taratura dei regolatori industriali può essere effettuata mediante tecniche di sintesi in frequenza standard. Tuttavia, in ambito industriale, sono per lo più utilizzate metodologie basate su prove in campo
Metodi ad anello chiuso: prevedono di effettuare prove a ciclo chiuso con regolatore solo proporzionale, o a relé, in modo da instaurare comportamenti oscillatori permanenti.I parametri dell’oscillazione (periodo ed ampiezza) vengono utilizzati per definire i valori dei parametri del regolatore
Metodi ad anello aperto: prevedono prove mediante ingressi a gradino sul solo processo da controllare, eventualmente comprensivo del sitema di misura.I parametri della risposta indiciale (guadagno, costante di tempo e tempo morto) vengono utilizzati per identificare il processo, e quindi parametri del regolatore
Sistemi di supervisione e controllo - Schemi di controllo e PID 32/52
La taratura dei regolatori industriali
I metodi a ciclo chiuso sono utilizzati dai programmi di auto e self-tuning dei regolatori industriali commerciali.
I metodi ad anello aperto sono quelli maggiormente utilizzati nell’industria di processo.
( )⎪⎩
⎪⎨
⎧
<
≥⎟⎟⎠
⎞⎜⎜⎝
⎛−≅
−−
=
m
m
Tt
gradinor
Tt
TteKtym
0
1 τ
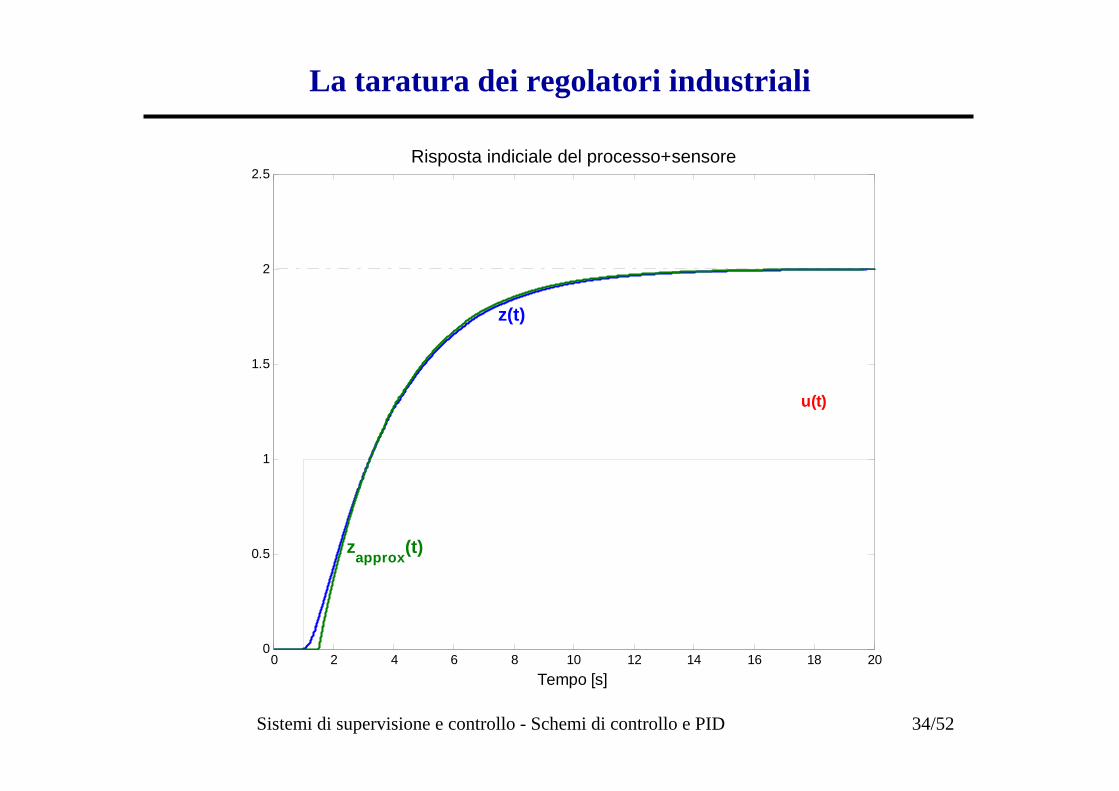
Il processo viene approssimato come un sistema del primo ordine più un ritardo finito
Sistemi di supervisione e controllo - Schemi di controllo e PID 33/52
La taratura dei regolatori industriali
C
H
yr +_
e
z
Pu
H
yr +_
e
z
Pu=cost
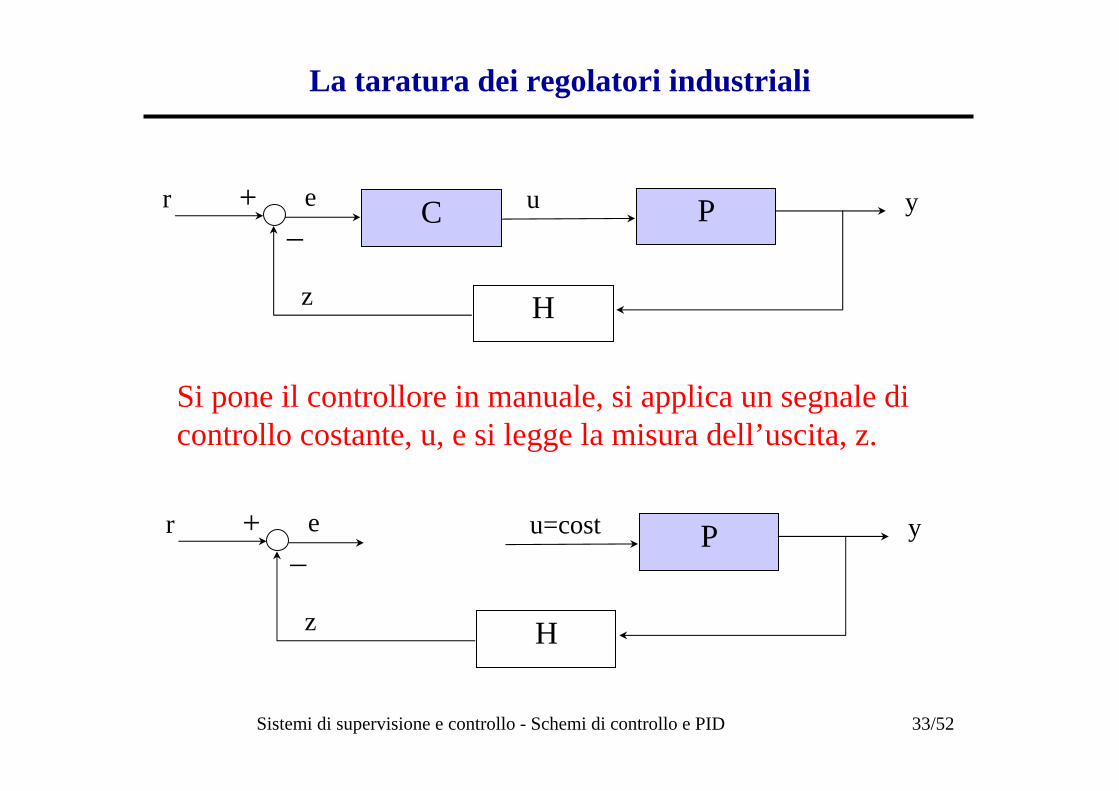
Si pone il controllore in manuale, si applica un segnale di controllo costante, u, e si legge la misura dell’uscita, z.
Sistemi di supervisione e controllo - Schemi di controllo e PID 34/52
La taratura dei regolatori industriali
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
2.5
Tempo [s]
Risposta indiciale del processo+sensore
z(t)
zapprox(t)
u(t)
Sistemi di supervisione e controllo - Schemi di controllo e PID 35/52
La taratura dei regolatori industriali
Procedura di identificazione
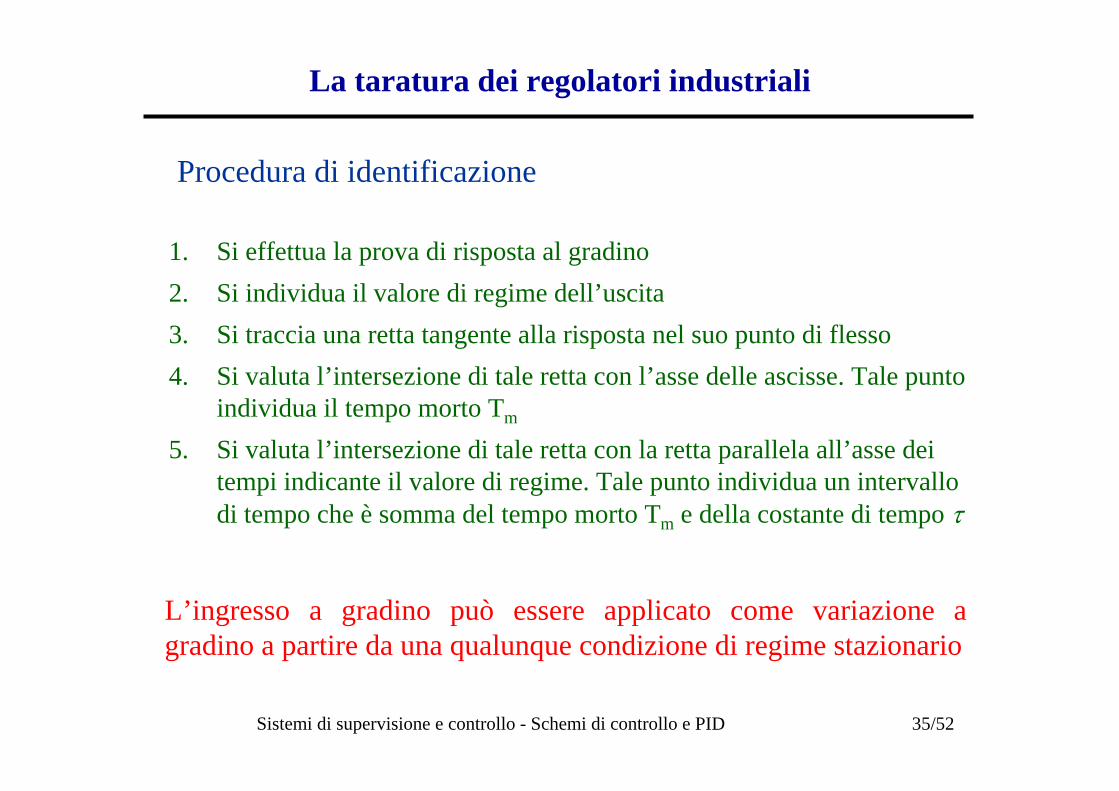
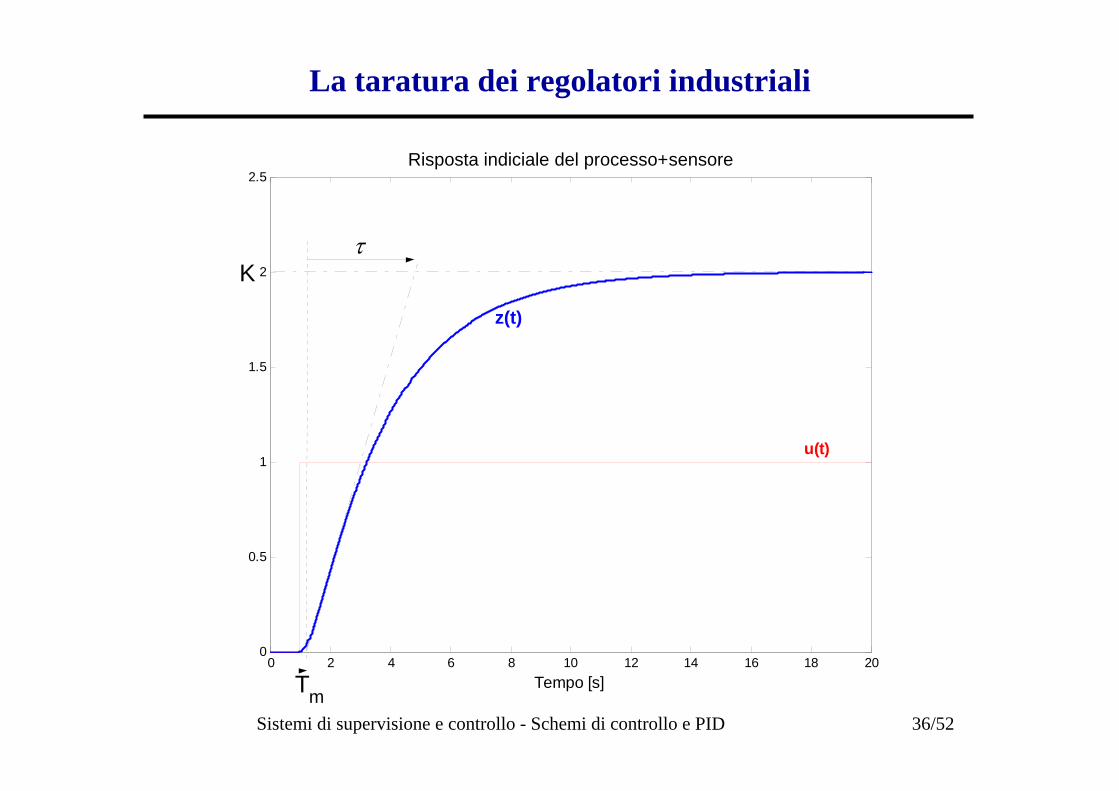
1. Si effettua la prova di risposta al gradino2. Si individua il valore di regime dell’uscita3. Si traccia una retta tangente alla risposta nel suo punto di flesso4. Si valuta l’intersezione di tale retta con l’asse delle ascisse. Tale punto
individua il tempo morto Tm
5. Si valuta l’intersezione di tale retta con la retta parallela all’asse dei tempi indicante il valore di regime. Tale punto individua un intervallo di tempo che è somma del tempo morto Tm e della costante di tempo τ
L’ingresso a gradino può essere applicato come variazione a gradino a partire da una qualunque condizione di regime stazionario
Sistemi di supervisione e controllo - Schemi di controllo e PID 36/52
La taratura dei regolatori industriali
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
2.5
Tempo [s]
Risposta indiciale del processo+sensore
z(t)
u(t)
τ K
Tm
Sistemi di supervisione e controllo - Schemi di controllo e PID 37/52
La taratura dei regolatori industriali
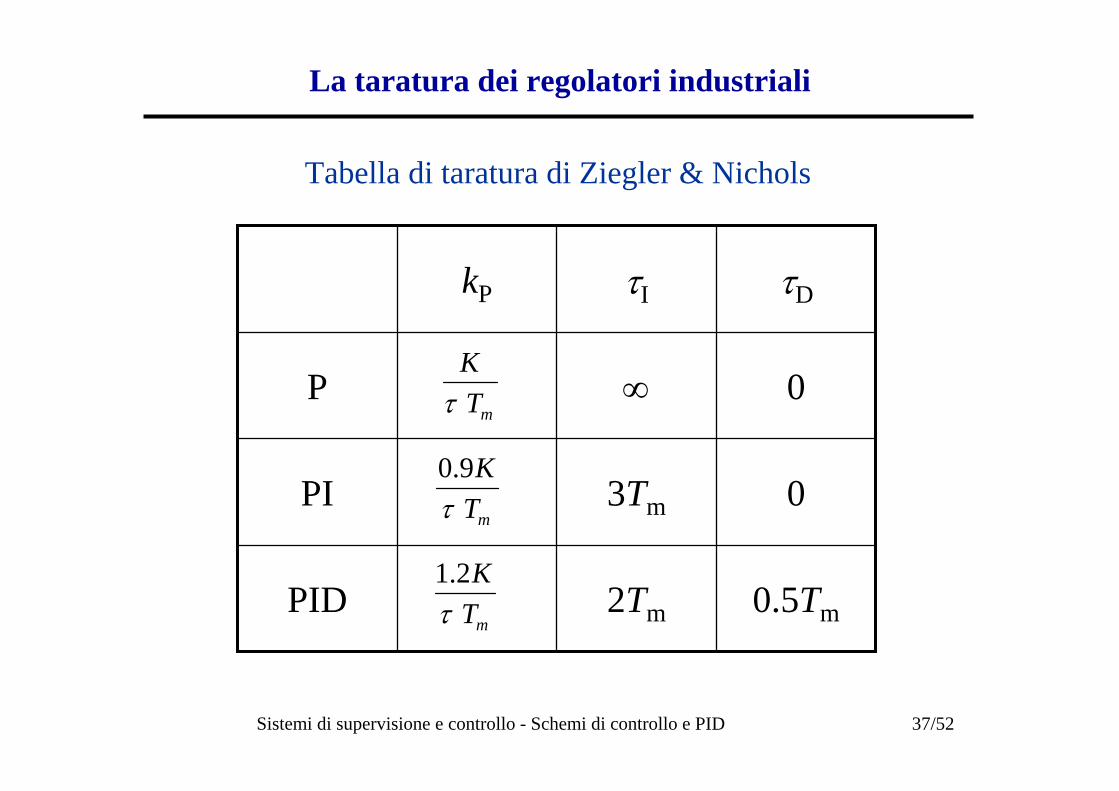
Tabella di taratura di Ziegler & Nichols
0.5Tm2TmPID
03TmPI
0∞P
τDτIkP
mTK τ
mTK
τ9.0
mTK
τ2.1
Sistemi di supervisione e controllo - Schemi di controllo e PID 38/52
La taratura dei regolatori industriali
La taratura di Ziegler & Nichols impone valori di smorzamento a ciclo chiuso abbastanza bassi (ξ≅0.2) e quindi risposte con sovraelongazioni elevate ed oscillazioni.
• incrementare il valore di τI• incrementare il valore di τD• ridurre il valore di kP• utilizzare altre tabelle di taratura
Tutte le tabelle di taratura sono sviluppate sotto specifiche ipotesi, ed è quindi necessario verificarne le condizioni di applicabilità
Sistemi di supervisione e controllo - Schemi di controllo e PID 39/52
La taratura dei regolatori industriali
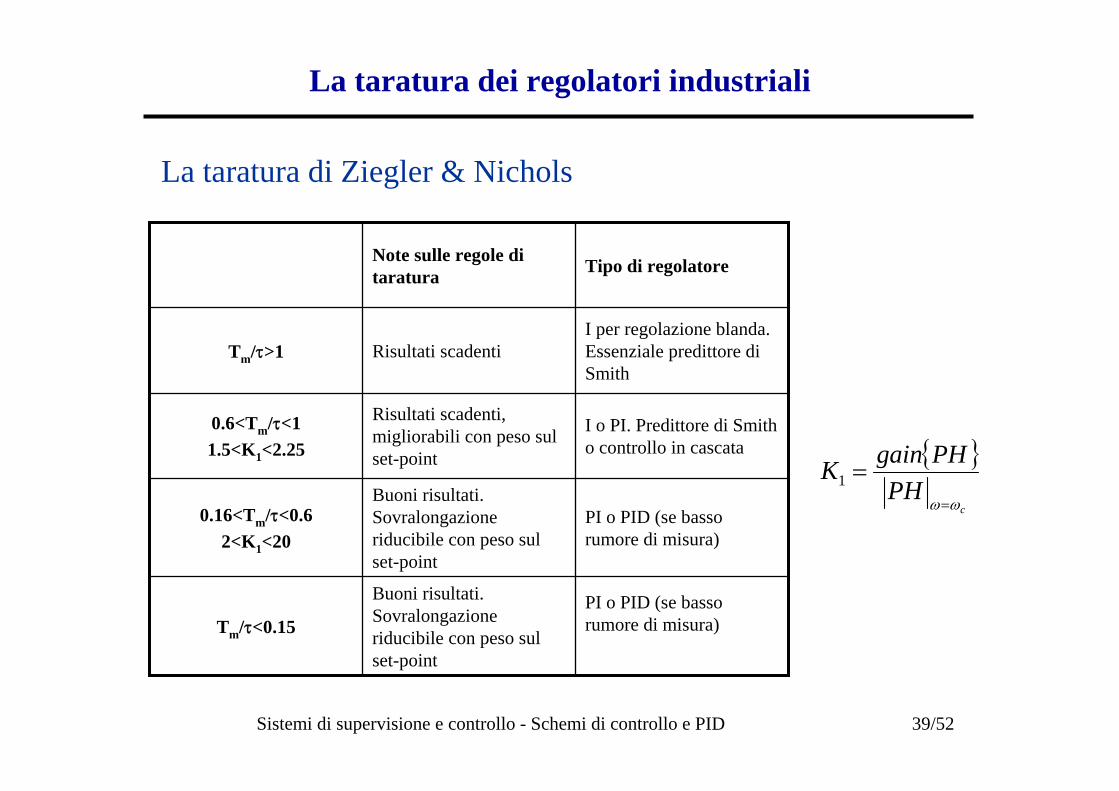
La taratura di Ziegler & Nichols
PI o PID (se basso rumore di misura)
Buoni risultati. Sovralongazione riducibile con peso sul set-point
Tm/τ<0.15
PI o PID (se basso rumore di misura)
Buoni risultati. Sovralongazioneriducibile con peso sul set-point
0.16<Tm/τ<0.62<K1<20
I o PI. Predittore di Smith o controllo in cascata
Risultati scadenti, migliorabili con peso sul set-point
0.6<Tm/τ<11.5<K1<2.25
I per regolazione blanda. Essenziale predittore di Smith
Risultati scadentiTm/τ>1
Tipo di regolatoreNote sulle regole di taratura
{ }c
PHPHgainK
ωω=
=1
Sistemi di supervisione e controllo - Schemi di controllo e PID 40/52
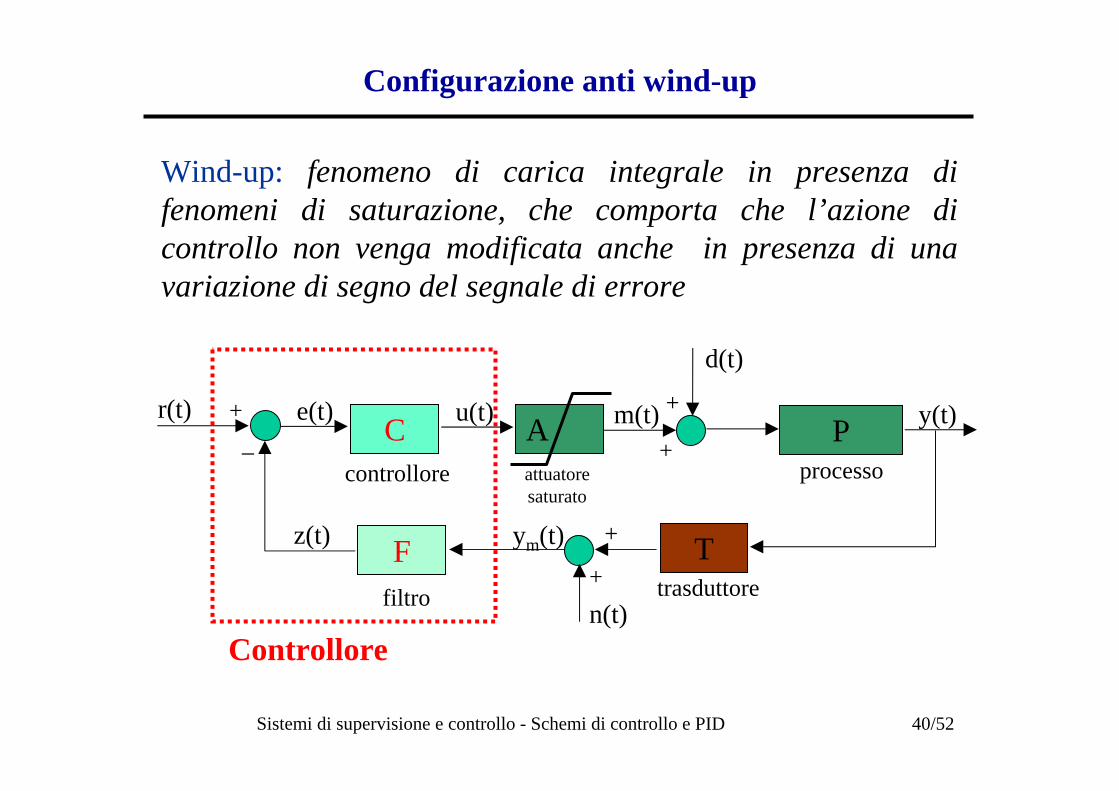
Configurazione anti wind-up
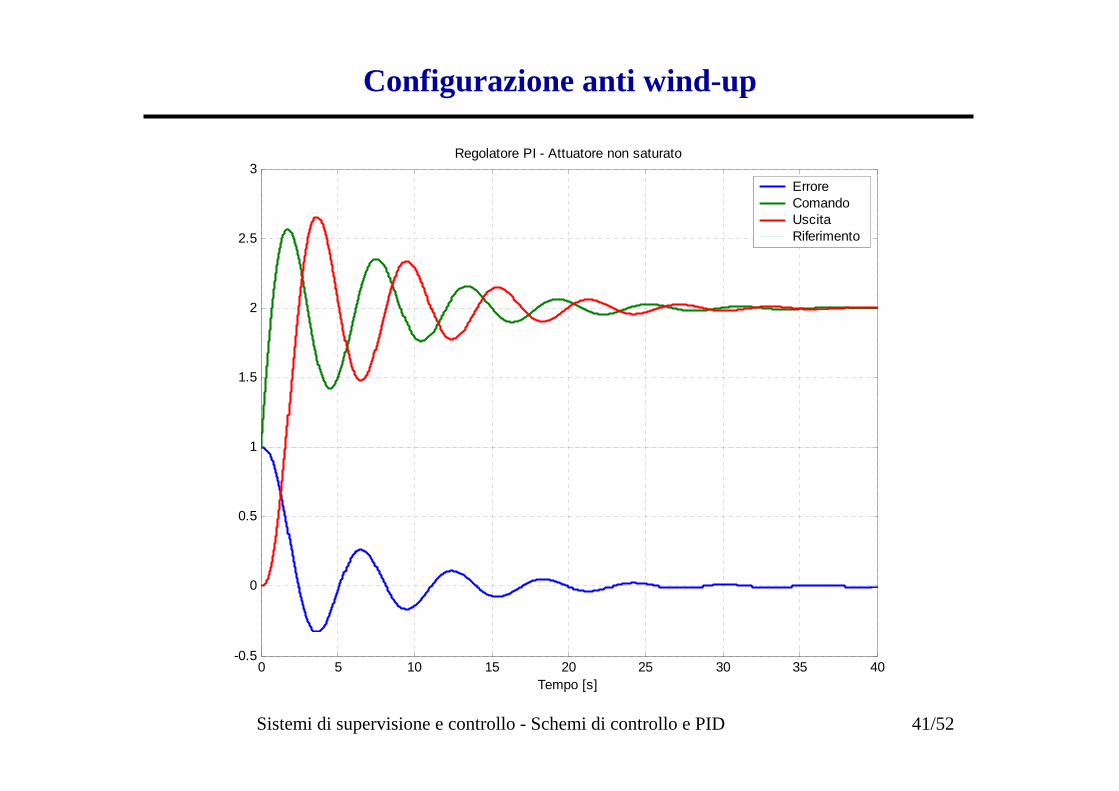
Wind-up: fenomeno di carica integrale in presenza di fenomeni di saturazione, che comporta che l’azione di controllo non venga modificata anche in presenza di una variazione di segno del segnale di errore
Aattuatoresaturato
Pprocesso
Ccontrollore
Ttrasduttore
+
+
+r(t) e(t) u(t) m(t)
d(t)
y(t)
ym(t)
_
Ffiltro
z(t)
Controllore
+
n(t)+
Sistemi di supervisione e controllo - Schemi di controllo e PID 41/52
Configurazione anti wind-up
0 5 10 15 20 25 30 35 40-0.5
0
0.5
1
1.5
2
2.5
3Regolatore PI - Attuatore non saturato
Tempo [s]
ErroreComandoUscitaRiferimento
Sistemi di supervisione e controllo - Schemi di controllo e PID 42/52
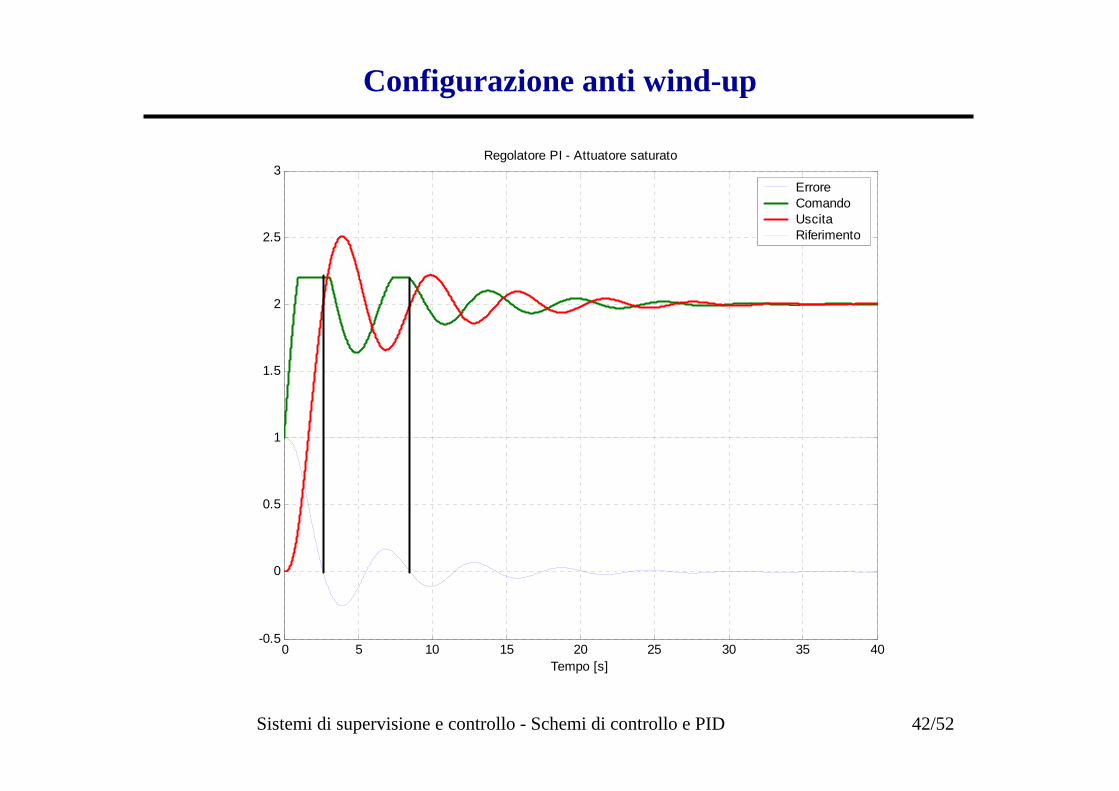
Configurazione anti wind-up
0 5 10 15 20 25 30 35 40-0.5
0
0.5
1
1.5
2
2.5
3
Tempo [s]
Regolatore PI - Attuatore saturato
ErroreComandoUscitaRiferimento
Sistemi di supervisione e controllo - Schemi di controllo e PID 43/52
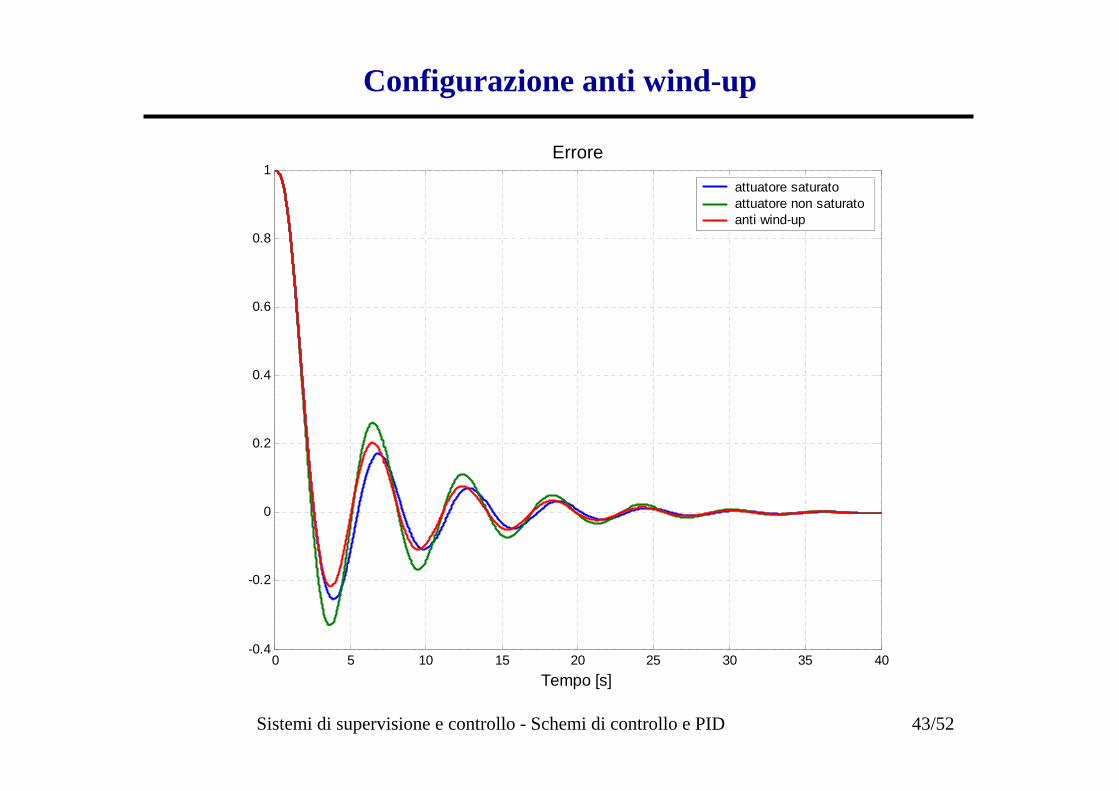
Configurazione anti wind-up
0 5 10 15 20 25 30 35 40-0.4
-0.2
0
0.2
0.4
0.6
0.8
1Errore
Tempo [s]
attuatore saturatoattuatore non saturatoanti wind-up
Sistemi di supervisione e controllo - Schemi di controllo e PID 44/52
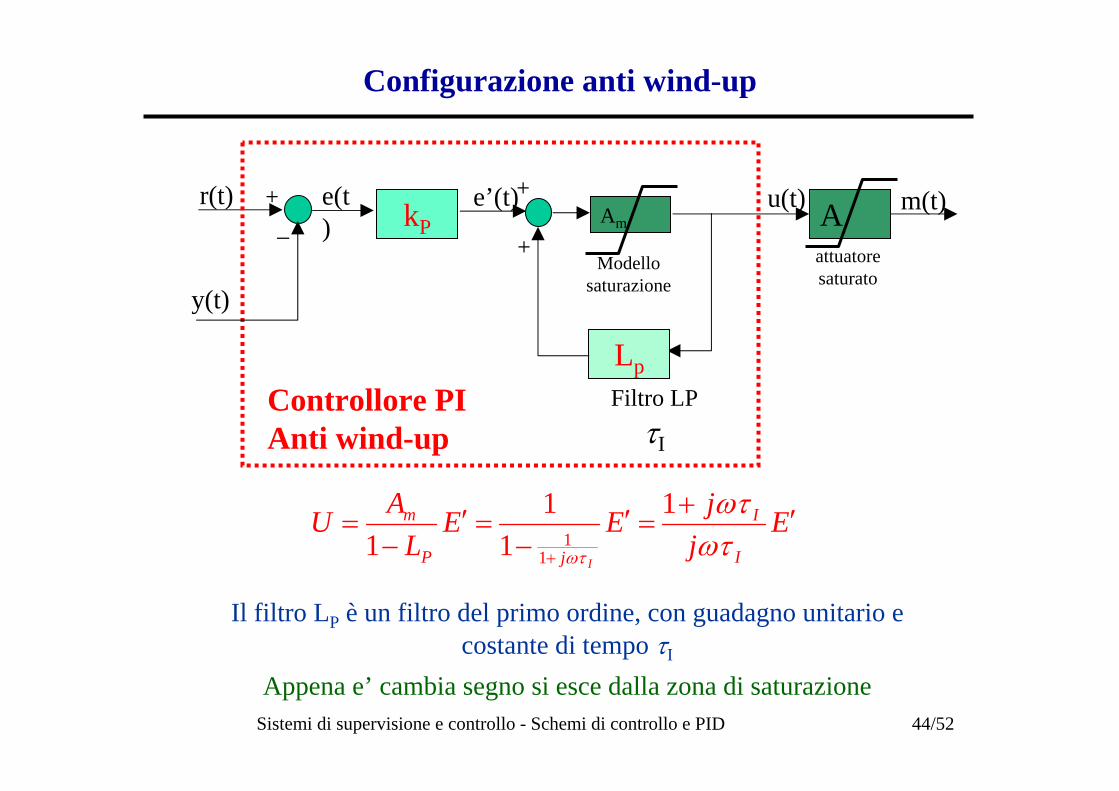
Configurazione anti wind-up
Il filtro LP è un filtro del primo ordine, con guadagno unitario e costante di tempo τI
Appena e’ cambia segno si esce dalla zona di saturazione
Aattuatoresaturato
kP+r(t) e(t
)u(t) m(t)
_
LpFiltro LPτI
e’(t)
Controllore PIAnti wind-up
Am
Modellosaturazione
+
+
y(t)
Ej
jEEL
AUI
I
jP
m
I
′+=′
−=′
−=
+ ωτωτ
ωτ
11
11 1
1
Sistemi di supervisione e controllo - Schemi di controllo e PID 45/52
Azione derivatrice sull’uscita
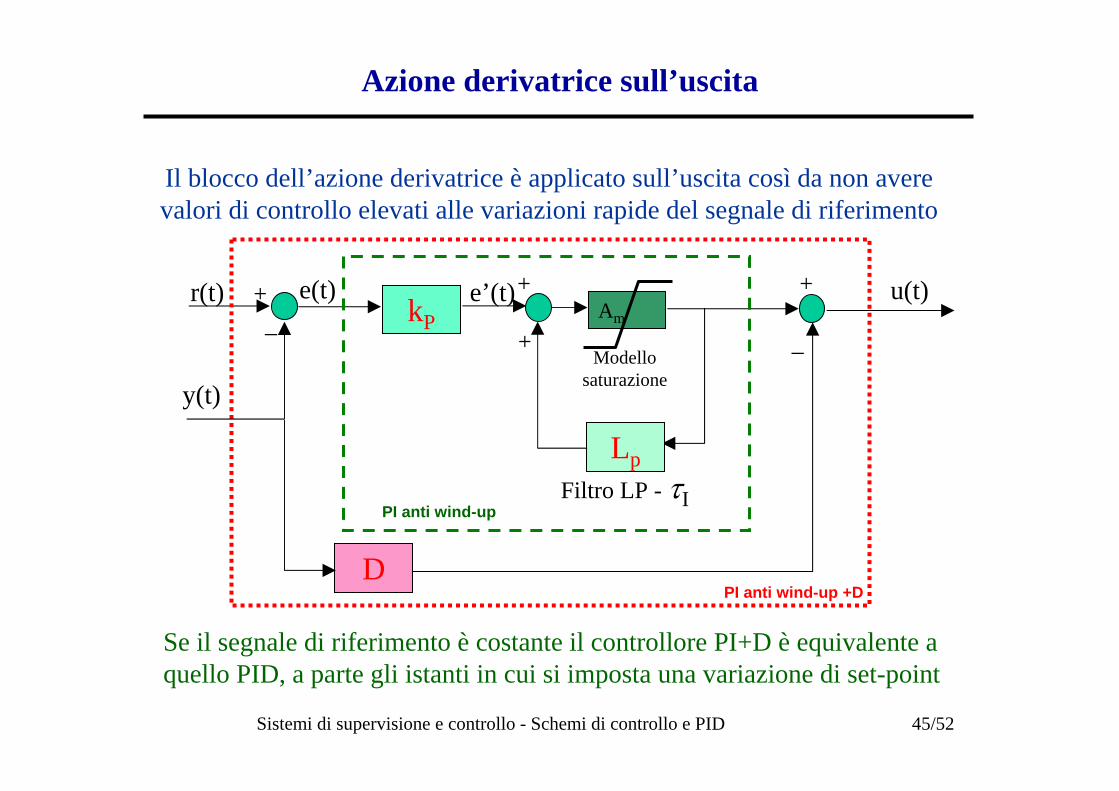
Il blocco dell’azione derivatrice è applicato sull’uscita così da non avere valori di controllo elevati alle variazioni rapide del segnale di riferimento
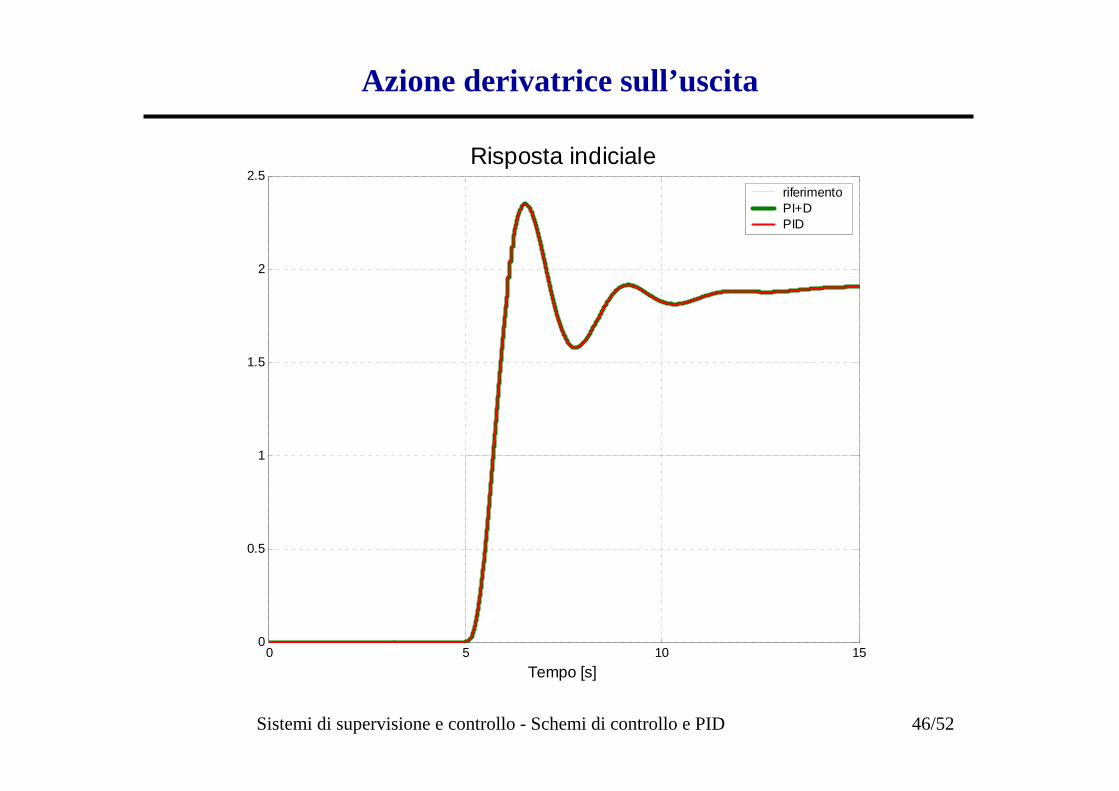
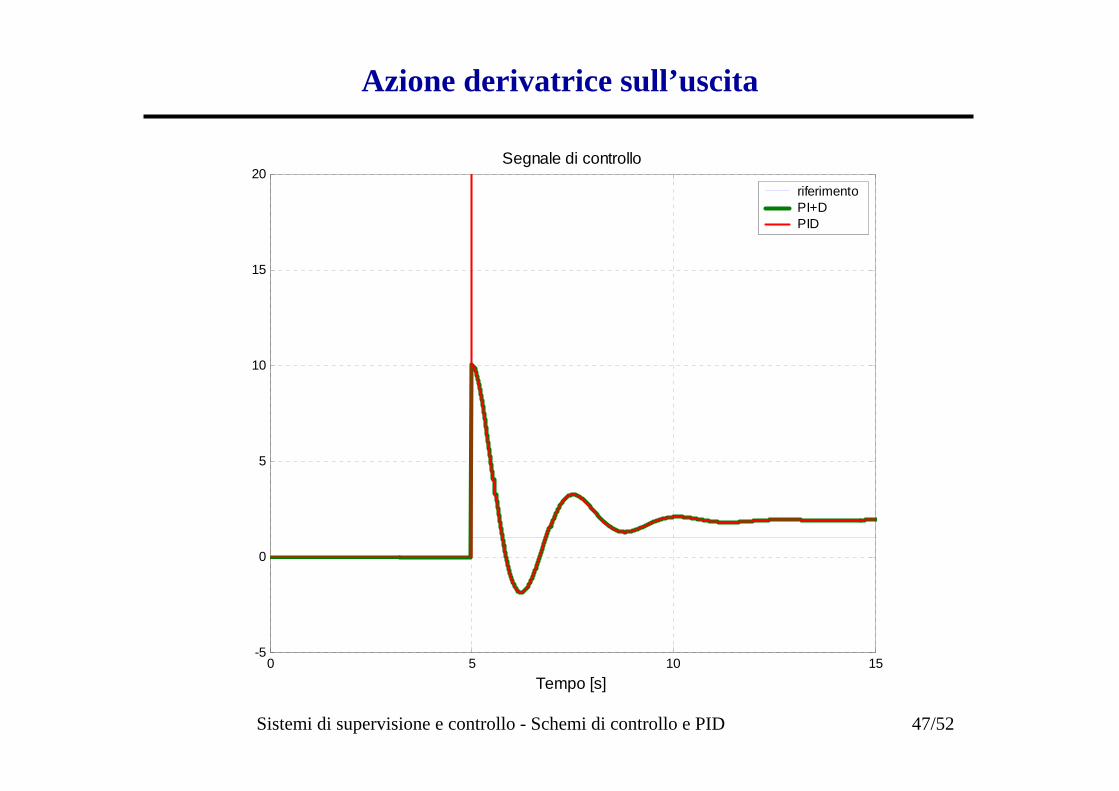
Se il segnale di riferimento è costante il controllore PI+D è equivalente a quello PID, a parte gli istanti in cui si imposta una variazione di set-point
kP+r(t) e(t) u(t)_
LpFiltro LP - τI
e’(t)Am
Modellosaturazione
+
+
y(t)
D
+
_
PI anti wind-up
PI anti wind-up +D
Sistemi di supervisione e controllo - Schemi di controllo e PID 46/52
Azione derivatrice sull’uscita
0 5 10 150
0.5
1
1.5
2
2.5Risposta indiciale
Tempo [s]
riferimentoPI+DPID
Sistemi di supervisione e controllo - Schemi di controllo e PID 47/52
Azione derivatrice sull’uscita
0 5 10 15-5
0
5
10
15
20
Tempo [s]
Segnale di controllo
riferimentoPI+DPID

Sistemi di supervisione e controllo - Schemi di controllo e PID 48/52
Predittore di Smith
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 250
0.2
0.4
0.6
0.8
1
Tempo [s]
Risposta indicialeuscitaderivata dell'uscitatangente
K
Tm + τ Tm
s
s
4137.7
934.2
1
=
=
=
τ
mT
K
s
s
46701
86805
0552.0
.
.
k
D
I
P
=
=
=
τ
τ
Sistemi di supervisione e controllo - Schemi di controllo e PID 49/52
Predittore di Smith
0 100 200 300 400 500 6000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tempo [s]
Risposta indiciale
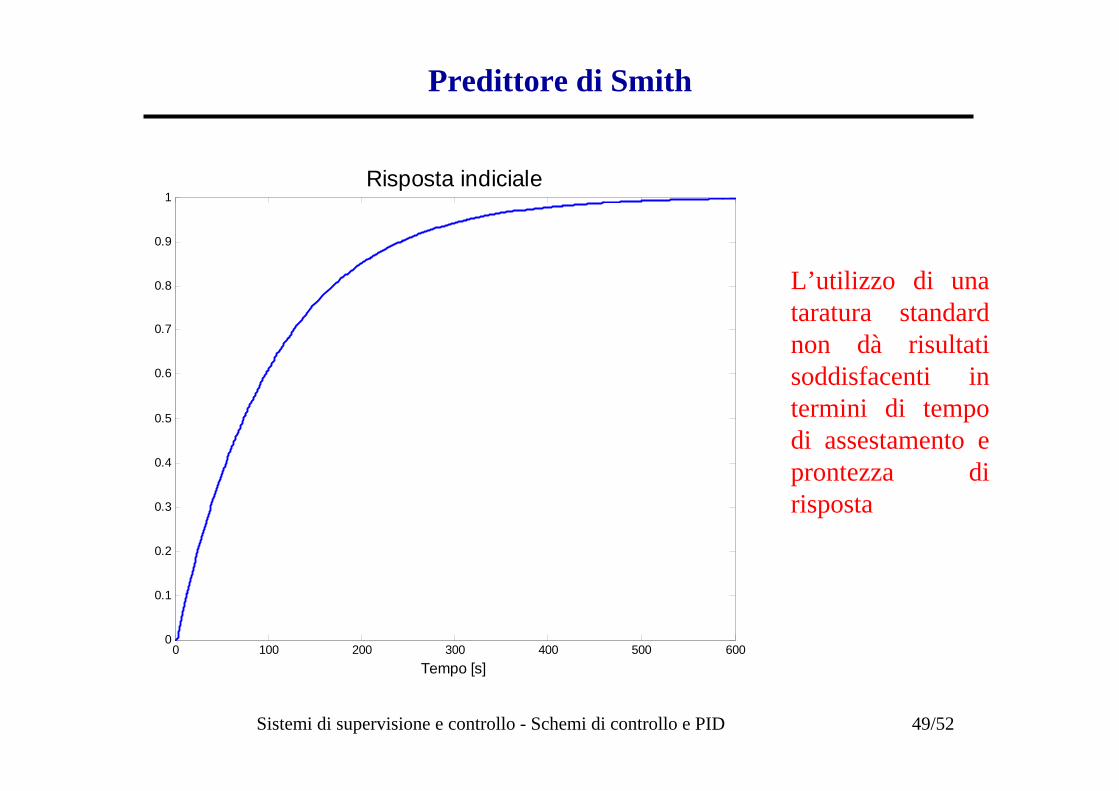
L’utilizzo di una taratura standard non dà risultati soddisfacenti in termini di tempo di assestamento e prontezza di risposta
Sistemi di supervisione e controllo - Schemi di controllo e PID 50/52
Predittore di Smith
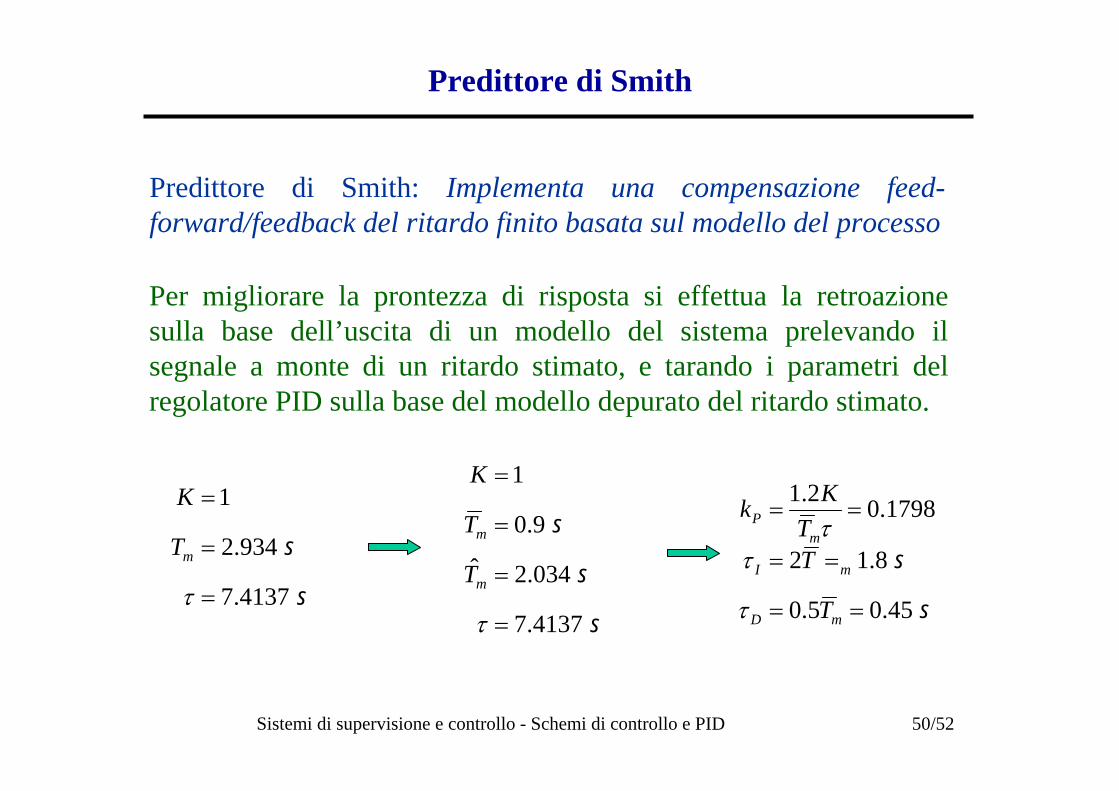
Per migliorare la prontezza di risposta si effettua la retroazione sulla base dell’uscita di un modello del sistema prelevando il segnale a monte di un ritardo stimato, e tarando i parametri delregolatore PID sulla base del modello depurato del ritardo stimato.
s
s
4137.7
934.2
1
=
=
=
τ
mT
K
s
s
45.05.0
8.12
1798.02.1
==
==
==
mD
mI
mP
T
TT
Kk
τ
ττ
s
s
s
4137.7
034.2ˆ
9.0
1
=
=
=
=
τ
m
m
T
T
K
Predittore di Smith: Implementa una compensazione feed-forward/feedback del ritardo finito basata sul modello del processo
Sistemi di supervisione e controllo - Schemi di controllo e PID 51/52
Predittore di Smith
Ingresso Uscita
Processo
1
7.4137s+1
Modello 1° ordine ModelloDelay=2.034
ModelloDelay=0.9
0.1798
K_P
0.1798/1.8
K_I�
0.45*0.1798
K_D
1s
IntegratoreGradino
du/dt
Derivatore
PID
Predittore di Smith
Errore di modello
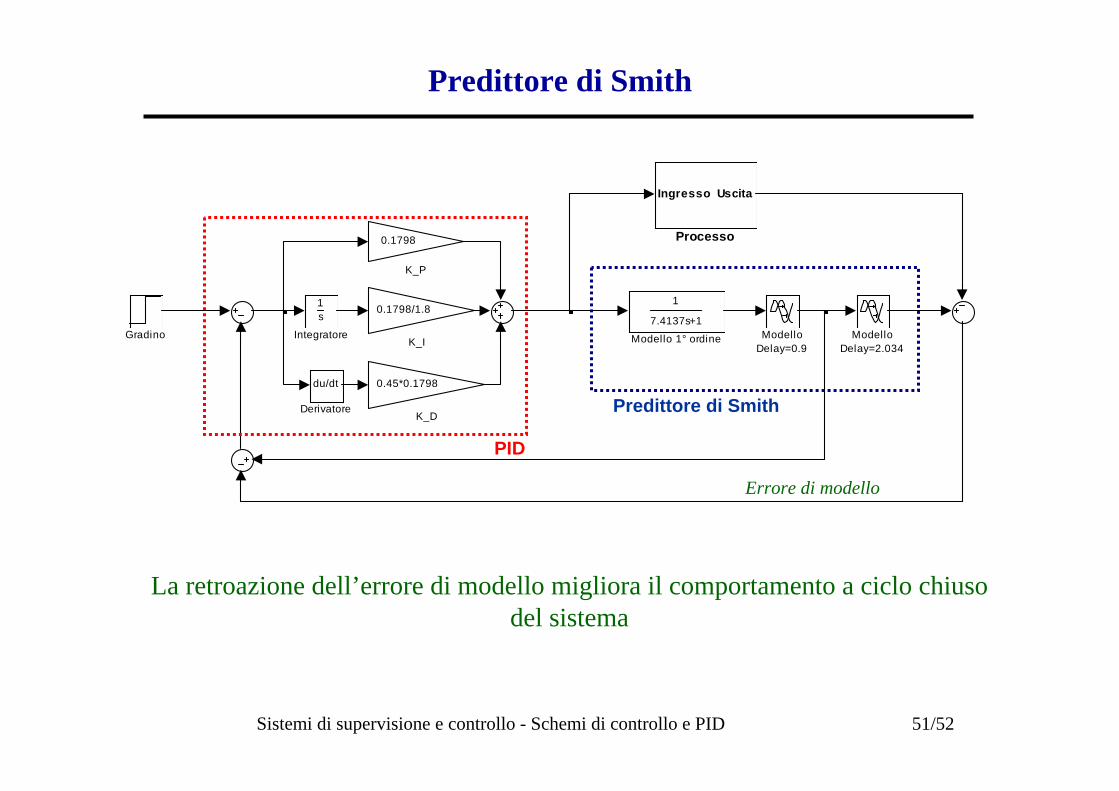
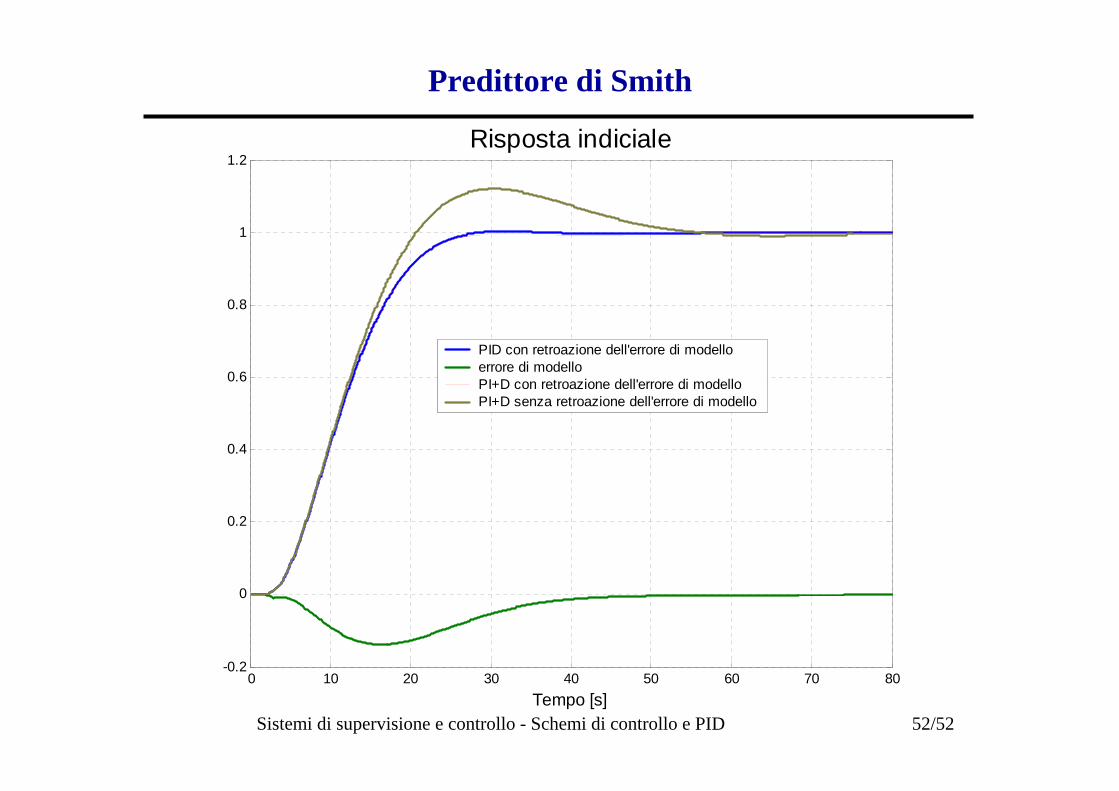
La retroazione dell’errore di modello migliora il comportamento a ciclo chiuso del sistema
Sistemi di supervisione e controllo - Schemi di controllo e PID 52/52
Predittore di Smith
0 10 20 30 40 50 60 70 80-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Tempo [s]
Risposta indiciale
PID con retroazione dell'errore di modelloerrore di modelloPI+D con retroazione dell'errore di modelloPI+D senza retroazione dell'errore di modello