Embed Size (px)
Citation preview

M E X I C O
TECNOLOGÍA FPGA PARA EL
MONITOREO Y DIAGNÓSTICO DE FALLAS EN MAQUINARIA INDUSTRIAL
ESPECIALIDAD: MECATRÓNICA
René de Jesús Romero Troncoso Doctor en Ingeniería
26 de Marzo de 2015

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 2
CONTENIDO
Página
Resumen ejecutivo 3 1 Introducción 4
2 Procesamiento de señales para el diagnóstico 7 3 Tecnología FPGA para monitoreo y diagnóstico 21
4 Ejemplos de desarrollo 23 5 Conclusiones 37
Referencias 37 Agradecimientos 44
Currículum vitae 44

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 3
RESUMEN EJECUTIVO
Con el objeto de reducir los paros e interrupciones en los procesos
industriales de manufactura, cada vez se hace más necesario el contar con sistemas automáticos que realicen el monitoreo y diagnóstico del
estado operativo de la maquinaria industrial. Es deseable que el monitoreo y diagnóstico sea realizado in situ, de manera continua sin
afectar al proceso y que se emita en un tiempo lo suficientemente corto para tomar acción preventiva, antes que correctiva, a la maquinaria en
cuestión. Lograr realizar la tarea de monitoreo y diagnóstico implica el desarrollo de algoritmos, algunos de ellos muy sofisticados, que sean
capaces de ser implementados en tecnologías electrónicas de muy alta velocidad, pero que mantengan bajos los costos del equipo adicional.
Para atender estas necesidades, el grupo de investigación liderado por el
autor con la participación de investigadores y estudiantes de posgrado de diversas Universidades nacionales y extranjeras, se ha dado a la
tarea de desarrollar líneas de investigación tendientes a la propuesta de metodologías de procesamiento de señales para el monitoreo y
diagnóstico de maquinaria industrial teniendo en mente la realización en tiempo real de los algoritmos, utilizando tecnología de arreglos de
compuertas programables en campo o FPGA (Field Programmable Gate Array, por sus siglas en inglés) que tienen la característica de una alta
velocidad de operación y mantienen costos moderados. El presente trabajo muestra una revisión de los trabajos desarrollados por este
grupo de investigación en monitoreo y diagnóstico de maquinaria industrial utilizando tecnología FPGA.
Palabras clave: FPGA, lógica programable, monitoreo y diagnóstico, fallas en maquinaria industrial
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 4
1. INTRODUCCIÓN.
Durante los últimos años, la investigación y el desarrollo tecnológico de
maquinaria industrial se han orientado a la producción de máquinas, denominadas de nueva generación, que deben tener las características
descritas por (Mekind , 2009):
Contar con un centro de maquinado inteligente donde se realicen los diseños mediante herramientas CAD/CAM.
Realizar investigación y desarrollo de máquinas reconfigurables que fácilmente y de manera rápida incorporen procesos de
manufactura híbridos y que estén preparadas para aceptar diferentes plataformas de nuevos herramentales.
Investigar y desarrollar técnicas de inspección in situ para
compensar errores durante la operación de la maquinaria. Desarrollar nuevas metodologías tendientes a la manufactura
autónoma mediante supervisión, monitoreo, diagnóstico y reparación automáticas.
Desarrollar e integrar controladores de procesos en tiempo real mediante arquitecturas abiertas CNC (Control Numérico por
Computadora) utilizando técnicas adaptivas de control por retroalimentación de múltiples entradas.
Desarrollar técnicas CAM que sean inteligentes y adaptivas, con capacidades de auto-aprendizaje.
Para poder contar con sistemas de monitoreo y diagnóstico autónomos,
in situ, de maquinaria industrial que sean capaces de detectar fallos en alguna parte de la cadena cinemática durante las etapas iniciales del
fallo, antes de que éste resulte catastrófico; es necesario desarrollar una
metodología de procesamiento de señales que permita detectar la falla y también contar con una tecnología electrónica que realice el monitoreo y
diagnóstico en tiempo real. La metodología de procesamiento de señales es el algoritmo o procedimiento analítico que mediante la información
recolectada de uno o varios sensores que supervisan la operación de la maquinaria es capaz de inferir de una manera simple la condición
operativa del sistema indicando cuándo se encuentra en condiciones sanas o sin fallo y cuándo se encuentra presente un fallo en el sistema.
Por otro lado, la tecnología electrónica que esté dedicada a realizar esta tarea de supervisión, monitoreo y diagnóstico, debe ser capaz de
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 5
realizarlo de manera continua, en tiempo real y cuando el sistema se
encuentra operando normalmente y no solo cuando se realice un mantenimiento preventivo. Esta condición implica que el sistema
electrónico debe operar continuamente en conjunto con la maquinaria,
por lo tanto debe ser viable económicamente; debe ser lo suficientemente rápido como para ejecutar el procesamiento de señales
en tiempo real, y debe ser flexible para incorporar mejoras en los algoritmos de monitoreo y diagnóstico, manteniendo la capacidad de
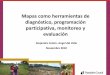
desempeño. En resumen, se necesita atender por un lado el desarrollo de la metodología de diagnóstico mediante los algoritmos de
procesamiento de señales que se aplican a la información recolectada por los sensores conectados a la maquinaria industrial; y por otro lado,
contar con una tecnología electrónica que sea capaz de ejecutar la metodología de procesamiento de señales en tiempo real para
proporcionar el diagnóstico, tal como se ilustra en el diagrama de bloques de la figura 1.
Figura 1. Diagrama de bloques de un sistema automático de monitoreo
y diagnóstico en maquinaria industrial.
Con respecto a los algoritmos de procesamiento de señales para el
monitoreo y diagnóstico de fallos en máquinas industriales, estos tienden a ser complejos puesto que se debe considerar la problemática
general del diagnóstico que no es un problema de simple solución. La primera dificultad surge con la necesidad de contar con diversos
sensores que deben ser monitoreados constantemente y de forma simultánea para poder contar con la información necesaria para realizar
el diagnóstico. El segundo problema lo constituye el ruido que se encuentra inmerso en las señales que entregan los sensores y que
requiere de técnicas especializadas para poder minimizarlo y así lograr extraer la información útil. El siguiente obstáculo a vencer es la
selección del algoritmo o conjunto de algoritmos de procesamiento de señales que sean adecuados para lograr el diagnóstico deseado,

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 6
tomando en cuenta que dada la naturaleza no estacionaria de las
señales de falla en la maquinaria, es necesario contar con algoritmos que puedan procesar información de esta naturaleza, lo cual no es
simple. Finalmente se debe considerar que la metodología de
diagnóstico debe ser capaz de implementarse en una tecnología electrónica que pueda realizar el procesamiento en tiempo real;
entendiendo como tiempo real el periodo de tiempo tolerado desde que ocurre el fallo hasta que se detecta y se tome acción al respecto. Cabe
hacer notar que existen metodologías de diagnóstico que son muy sofisticadas, pero tienen la desventaja de requerir un poder de cómputo
muy alto, haciéndolas inadecuadas para su implementación en tiempo real en las tecnologías disponibles actualmente.
Para la implementación tecnológica de los algoritmos de procesamiento
de señales se cuenta con tres opciones posibles: las computadoras personales denominadas genéricamente como PC (Personal Computer),
los microprocesadores especializados conocidos como DSP (Digital Signal Processor, procesador digital de señales) y los arreglos de
compuertas programables en campo o FPGA (Field Programmable Gate
Array) por sus siglas en inglés. Las PC son los sistemas más simples para utilizar y se pueden realizar desarrollos rápidos debido a la gran
cantidad de paquetes de software de procesamiento de señales que se encuentran disponibles como Matlab-Simulink y National Instruments-
LabView; asimismo, diversas compañías ofrecen sistemas de adquisición de datos que se enlazan directamente entre el software y los sensores
físicos. No obstante estas facilidades que presentan las PC, se debe tomar en cuenta que las soluciones desarrolladas con estas plataformas
resultan muy costosas y puede ser que la aplicación requerida no justifique el gasto realizado. Por otro lado, estas plataformas son de fácil
desarrollo y aplicación, pero de ninguna manera son óptimas en cuanto al desempeño en velocidad de procesamiento, por lo que algunos
algoritmos de diagnóstico no pueden ser implementados para su ejecución en tiempo real en estos sistemas, además se debe recordar
que la propiedad intelectual de los desarrollos realizados en estas
plataformas pertenece a la empresa proveedora de la plataforma, no al usuario. La segunda alternativa de implementación tecnológica son los
procesadores especializados o DSP; los cuales pueden ejecutar un algoritmo de procesamiento de señales hasta 10 veces más rápido que
una PC y su costo es inferior comparado con las plataformas tipo Simulink y LabView; sin embargo, no son tan fáciles de programar y
existe una cierta dependencia tecnológica hacia los proveedores de los dispositivos, aunque la propiedad intelectual de la implementación
pertenece al desarrollador. La tercera alternativa de implementación son los FPGA que pueden ejecutar los algoritmos de procesamiento de
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 7
señales hasta 10 veces más rápido que un DSP, y por ende hasta 100
veces más rápido que una PC, con costos realmente atractivos para su uso en aplicaciones industriales. La principal desventaja los dispositivos
FPGA es que se requiere un mayor esfuerzo para el desarrollo de las
aplicaciones, tanto la parte hardware como la parte software, ya que el diseño se realiza a nivel de compuertas básicas y bloques funcionales.
Para que un diseño sea efectivo con estos dispositivos, es necesario contar con personal altamente entrenado en diseño de circuitos
integrados digitales, generalmente de nivel de posgrado. A pesar de las desventajas que tienen las tecnologías, nótese que todas ellas pueden
ser conjuntadas en plataformas híbridas que exploten las ventajas particulares de cada tecnología y así proporcionar la solución deseada.
El principal objetivo del presente trabajo es mostrar un análisis del
estado del arte de los métodos de procesamiento de señales y las tecnologías FPGA en la aplicación y desarrollo de sistemas automáticos
de monitoreo y diagnóstico de fallos en maquinaria industrial. Asimismo, se presentan de forma resumida los principales retos teóricos y prácticos
que se tienen para el desarrollo del área, al igual que los retos en la
formación de recursos humanos que tiene nuestro país para contar con personal calificado para el diseño de sistemas de monitoreo y
diagnóstico de fallos en maquinaria industrial que cumplan con las especificaciones de los sistemas de nueva generación.
El resto del trabajo está organizado como sigue: la sección 2 hace un
análisis de las técnicas de procesamiento de señales que se utilizan para el monitoreo y diagnóstico de maquinaria industrial, la sección 3
proporciona un panorama general de la tecnología FPGA y sus herramientas de desarrollo, así como sus usos en el monitoreo y
diagnóstico de maquinaria industrial. En la sección 4 se presentan algunos ejemplos de desarrollo de sistemas y equipo para el monitoreo
y diagnóstico de fallos en maquinaria industrial, realizados por el grupo de investigación cuyo líder es el autor del presente trabajo, con la
finalidad de resolver problemas particulares de la industria y de la
academia, así como para contribuir en la formación de recursos humanos especializados a nivel posgrado en el diseño de sistemas
basados en tecnología FPGA. Finalmente, la sección 5 presenta las conclusiones del trabajo.
2. PROCESAMIENTO DE SEÑALES PARA EL DIAGNÓSTICO.
Para poder determinar la condición operativa de una máquina es necesario realizar los siguientes pasos:
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 8
Instrumentación
Monitoreo Diagnóstico
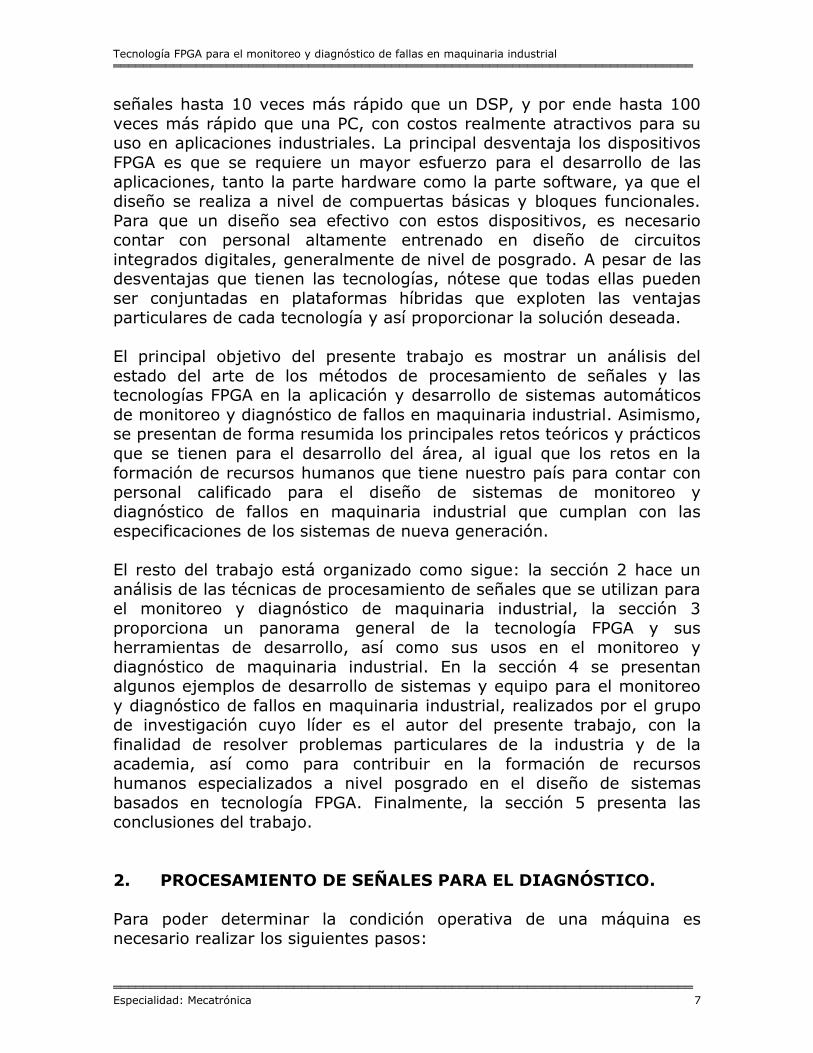
El proceso de instrumentación consiste en medir el valor de una o varias variables físicas que contienen la información necesaria para describir el
modo operativo de la máquina bajo análisis. Para llevar a cabo esta tarea es necesario establecer una cadena de instrumentación como se
describe en el diagrama de bloques de la figura 2.
Figure 2. Sistema general de instrumentación.
La variable física a medir es sensada mediante un elemento sensor primario que en conjunto con el transductor entregan una señal eléctrica
que es proporcional a la variable física. Esta señal contiene muy poca energía y es necesario incrementar esta energía mediante una etapa de
pre-amplificación cuya finalidad es lograr un acoplamiento de impedancias y posteriormente un amplificador que proporciona los
niveles adecuados de corriente y tensión para procesar la señal. A
continuación se requiere un acondicionador de señal que se encarga de realizar tareas como la reducción del ruido, limitación en banda y
ecualización espectral. Con el objeto de obtener el valor digital de la señal es necesario colocar un filtro de anti-traslape espectral que limite
en frecuencia a la señal, de acuerdo con el teorema de Nyquist. El proceso de conversión requiere en sí tres bloques funcionales que son el
muestreador y retenedor quien discretiza la señal en tiempo, el convertidor de analógico a digital quien discretiza la señal en amplitud y
la interfaz que se encarga de enviar los datos para su posterior análisis. La cadena de instrumentación debe realizarse para cada uno de los
diferentes sensores que se tienen en el sistema.
Una vez que se cuenta con el valor digital de la señal mediante el proceso de instrumentación, el siguiente paso es el monitoreo de la
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 9
variable o variables físicas bajo análisis que consiste en tomar conjuntos
determinados de muestras para extraer las características principales que permitan inferir la condición operativa de la máquina. Es en esta
etapa donde se realiza mayormente el procesamiento de señales,
encaminado a la extracción de estas características principales de la variable física medida. El procesamiento empleado en esta etapa puede
ser realizado en el dominio del tiempo, de la frecuencia o del espacio tiempo-frecuencia. Los procesamientos correspondientes al dominio del
tiempo analizan la señal tomando como referencia su evolución en el tiempo e incluyen al filtrado digital (reducción de ruido, selección de
banda espectral, etc.) y al análisis estadístico (media, varianza, valor pico, etc.). El procesamiento en el dominio de la frecuencia consiste en
realizar el análisis desde el punto de vista del contenido espectral de la señal y típicamente involucra transformadas de espacio como la
transformada discreta de Fourier y los métodos de estimación espectral tanto paramétricos como no paramétricos. El procesamiento en el
espacio tiempo-frecuencia trata de conjuntar las características de análisis de las técnicas del domino del tiempo y del dominio de la
frecuencia para obtener el espectro de la señal conforme evoluciona en
el tiempo. Las técnicas de análisis tiempo-frecuencia incluyen a las transformadas de ondoletas, la descomposición de modo empírico, la
transformada corta de Fourier, entre otras.
El objetivo final de la instrumentación y el monitoreo es obtener un diagnóstico del estado de la máquina bajo análisis. El proceso de
diagnóstico se puede definir como el procedimiento para inferir el estado o condición operativa de la maquinaria en cuestión en función de los
parámetros estimados por el proceso de monitoreo de la señal. Un sistema de diagnóstico, en forma general, consiste en un procedimiento
de toma de decisiones para dar un resultado sobre las condiciones operativas. Las técnicas de diagnóstico más utilizadas incluyen a los
sistemas expertos, árboles binarios, lógica difusa, redes neuronales, máquinas de soporte vectorial, algoritmos genéticos, entre otros.
Como ejemplo de este proceso, considere la operación del motor de un automóvil desde el punto de vista del usuario. Primeramente es
necesario que el motor cuente con la instrumentación adecuada que puede incluir sensores para medir la temperatura del motor, la presión
de aceite y el nivel de inyección de combustible. Esta instrumentación se concentra en un sistema de monitoreo que toma las lecturas de estas
variables y las procesa para determinar si se está operando en la región recomendada. Finalmente, mediante un sistema experto, la
computadora da un diagnóstico al usuario sobre la condición del motor en base a los parámetros estimados y le informa de manera simple si el

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 10
motor opera correctamente, si hay necesidad de darle mantenimiento
en un corto plazo o de si hay una falla que requiere atención inmediata. Para poder generar este simple mensaje se necesita de la
instrumentación adecuada para medir las variables físicas de interés al
proceso, el monitoreo y procesamiento de las señales para extraer las características o parámetros operativos que sean indicativos de la
operación del sistema y finalmente el análisis mediante un sistema experto que interprete los valores de estos parámetros y emita el
diagnóstico.
2.1 Procesamiento de señales para el monitoreo.
Con el objeto de ejemplificar los efectos del procesamiento de señales
para el monitoreo, considere la forma de onda hipotética que se muestra en la figura 3.
Figura 3. Forma de onda hipotética de un proceso.
A simple vista se puede notar que se trata de una señal periódica con
cierto contenido armónico y un promedio diferente de cero. La señal contiene ruido y la periodicidad se ve afectada por dos eventos
transitorios que ocurren en diferentes tiempos. El reto del monitoreo es procesar la señal de tal manera que se logren extraer las características
o parámetros que son indicadores del estado del proceso en análisis.
Si la característica que se busca de la señal es la periodicidad de la componente espectral principal para eliminar armónicos y reducir el
ruido, un simple filtro de paso bajo puede cumplir con el objetivo, tal
como se muestra en la gráfica procesada de la figura 4. En este caso, el procesamiento da como resultado la extracción de una señal sinusoidal
con menor contenido armónico, ruido disminuido y que mantiene el nivel promedio original; mientras que la información de los eventos
transitorios y de los armónicos se pierde. Si por otro lado no se desea preservar la forma de onda, sino solamente conocer los valores medio,
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 11
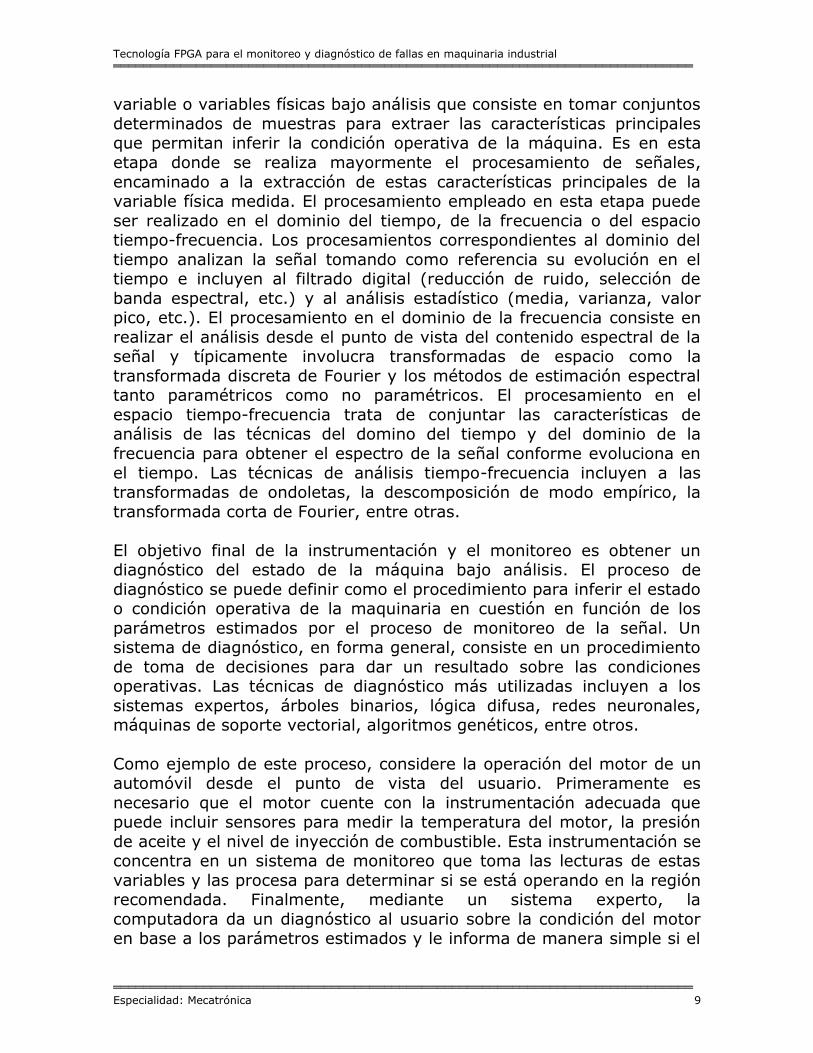
raíz media cuadrática o RMS (root mean square) y valores pico, basta
con realizar un procesamiento estadístico de una la muestra completa de la señal y entregar los valores numéricos, que para este ejemplo se
muestran en la tabla 1. El filtrado digital y el procesamiento estadístico
se realizan en el dominio del tiempo.
Figura 4. Resultado de la señal filtrada.
Tabla 1. Parámetros estadísticos básicos de la señal bajo análisis.
Parámetro Valor
Media 0.7503
RMS 0.7619
Valor pico máximo 9.9703
Valor pico mínimo -3.0015
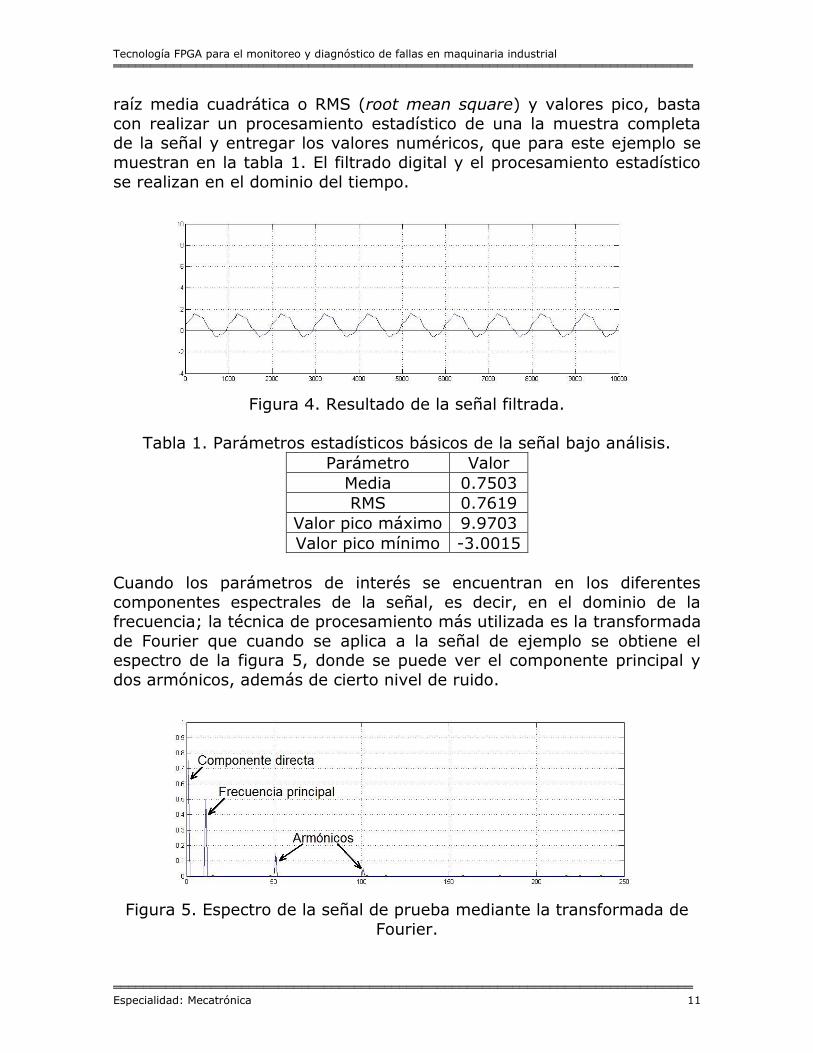
Cuando los parámetros de interés se encuentran en los diferentes
componentes espectrales de la señal, es decir, en el dominio de la frecuencia; la técnica de procesamiento más utilizada es la transformada
de Fourier que cuando se aplica a la señal de ejemplo se obtiene el espectro de la figura 5, donde se puede ver el componente principal y
dos armónicos, además de cierto nivel de ruido.
Figura 5. Espectro de la señal de prueba mediante la transformada de
Fourier.

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 12
Las técnicas de procesamiento de señales antes descritas son
consideradas como técnicas clásicas de procesamiento y tienen en común que consideran a la señal bajo análisis como una señal
estacionaria, es decir, una señal que conserva un patrón definido
durante todo el tiempo y no contiene eventos transitorios. Si las características principales que definen la condición operativa del sistema
bajo monitoreo es de naturaleza estacionaria, entonces estas técnicas clásicas son suficientes para realizar el procesamiento, pero cuando las
características de interés son de naturaleza no estacionaria o transitoria, las técnicas clásicas de procesamiento no entregan resultados
satisfactorios y es necesario utilizar otras técnicas que permitan descomponer la señal original para separar los eventos estacionarios de
los no estacionarios.
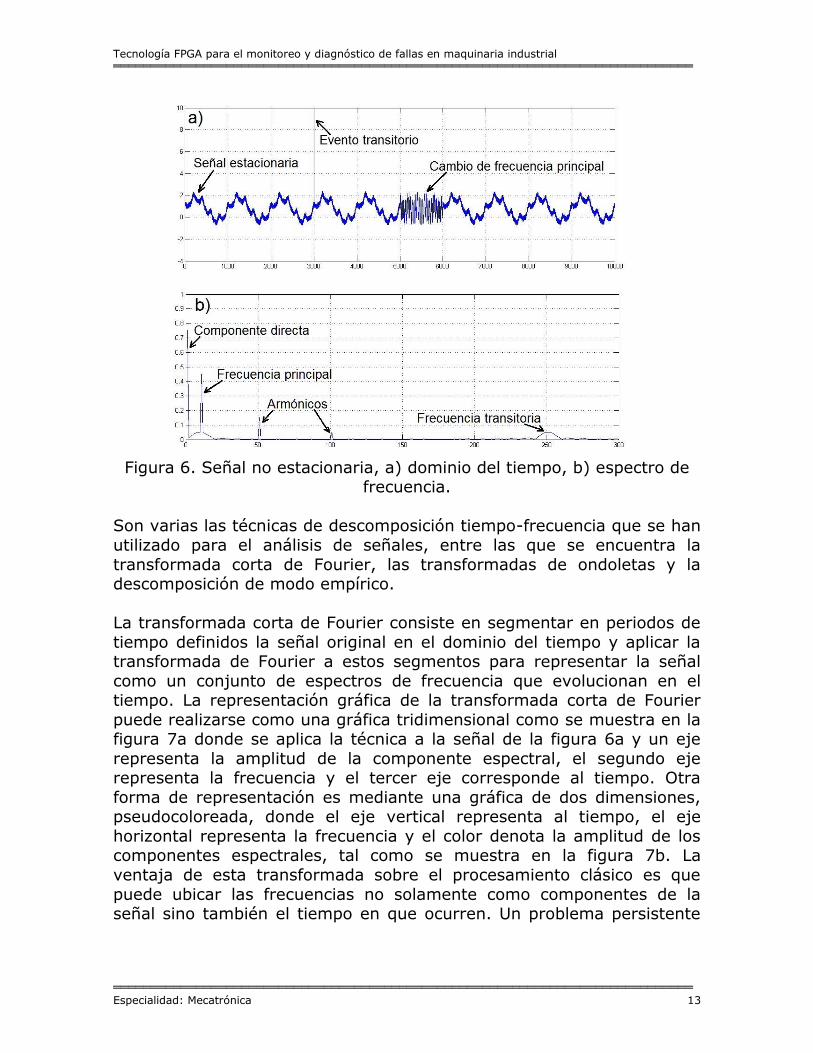
Para apreciar el efecto del análisis clásico sobre una señal no estacionaria, considere la forma de onda en el dominio del tiempo que
se muestra en la figura 6a y que consiste de una componente principal de frecuencia cuyo valor permanece invariante por un tiempo y durante
un periodo definido, el valor de la frecuencia aumenta para retornar a su
valor original. La señal contiene armónicos, cierto nivel de ruido y un evento transitorio de tipo impulsivo. El espectro de la señal se muestra
en la figura 6b, donde se puede apreciar la componente directa, la frecuencia principal, los armónicos y la frecuencia transitoria; sin
embargo, la frecuencia principal y en particular la frecuencia transitoria no se encuentran bien definidos en la gráfica del espectro, debido a la
naturaleza no estacionaria de la señal. Además, el espectro por sí solo nos proporciona información de las frecuencias presentes en la señal,
pero no nos da información del tiempo en que ocurren estas frecuencias.
Se debe tener en cuenta que la mayoría de las señales que se pueden medir en los sistemas reales son de naturaleza no estacionaria y
algunos de los parámetros de interés se pueden encontrar en la parte estacionaria, pero otros parámetros se encuentran en los componentes
transitorios. Así que en términos generales, se puede inferir que las
técnicas clásicas de procesamiento de señales pueden no ser adecuadas para extraer la información relevante en procesos de monitoreo en
máquinas industriales. La solución que se le ha dado al problema del monitoreo de señales no estacionarias consiste en la aplicación de
técnicas de análisis denominadas tiempo-frecuencia que permiten por un lado realizar el análisis de los componentes espectrales que
constituyen a la señal bajo estudio, pero conservando la información del tiempo en que estos componentes estuvieron presentes en la señal.
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 13
Figura 6. Señal no estacionaria, a) dominio del tiempo, b) espectro de
frecuencia.
Son varias las técnicas de descomposición tiempo-frecuencia que se han
utilizado para el análisis de señales, entre las que se encuentra la
transformada corta de Fourier, las transformadas de ondoletas y la descomposición de modo empírico.
La transformada corta de Fourier consiste en segmentar en periodos de
tiempo definidos la señal original en el dominio del tiempo y aplicar la transformada de Fourier a estos segmentos para representar la señal
como un conjunto de espectros de frecuencia que evolucionan en el tiempo. La representación gráfica de la transformada corta de Fourier
puede realizarse como una gráfica tridimensional como se muestra en la figura 7a donde se aplica la técnica a la señal de la figura 6a y un eje
representa la amplitud de la componente espectral, el segundo eje representa la frecuencia y el tercer eje corresponde al tiempo. Otra
forma de representación es mediante una gráfica de dos dimensiones, pseudocoloreada, donde el eje vertical representa al tiempo, el eje
horizontal representa la frecuencia y el color denota la amplitud de los componentes espectrales, tal como se muestra en la figura 7b. La
ventaja de esta transformada sobre el procesamiento clásico es que
puede ubicar las frecuencias no solamente como componentes de la señal sino también el tiempo en que ocurren. Un problema persistente

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 14
con esta transformada siguen siendo los eventos transitorios que aún no
es capaz de detectarlos.
Figura 7. Transformada corta de Fourier, a) vista tridimensional, b) vista
bidimensional con pseudocolor para indicar la amplitud.
Otras técnicas como las transformadas de ondoletas han sido propuestas para identificar la ocurrencia de eventos transitorios en las
señales bajo análisis. El proceso de la transformada de ondoletas consiste en descomponer la señal original en un conjunto de varias
señales conteniendo cada una de ellas una banda de frecuencias
específica, conservando la información del tiempo en que ocurren. Básicamente la transformada de ondoletas es un banco de filtros, donde
cada filtro selecciona una banda de frecuencias específica de la señal. En
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 15
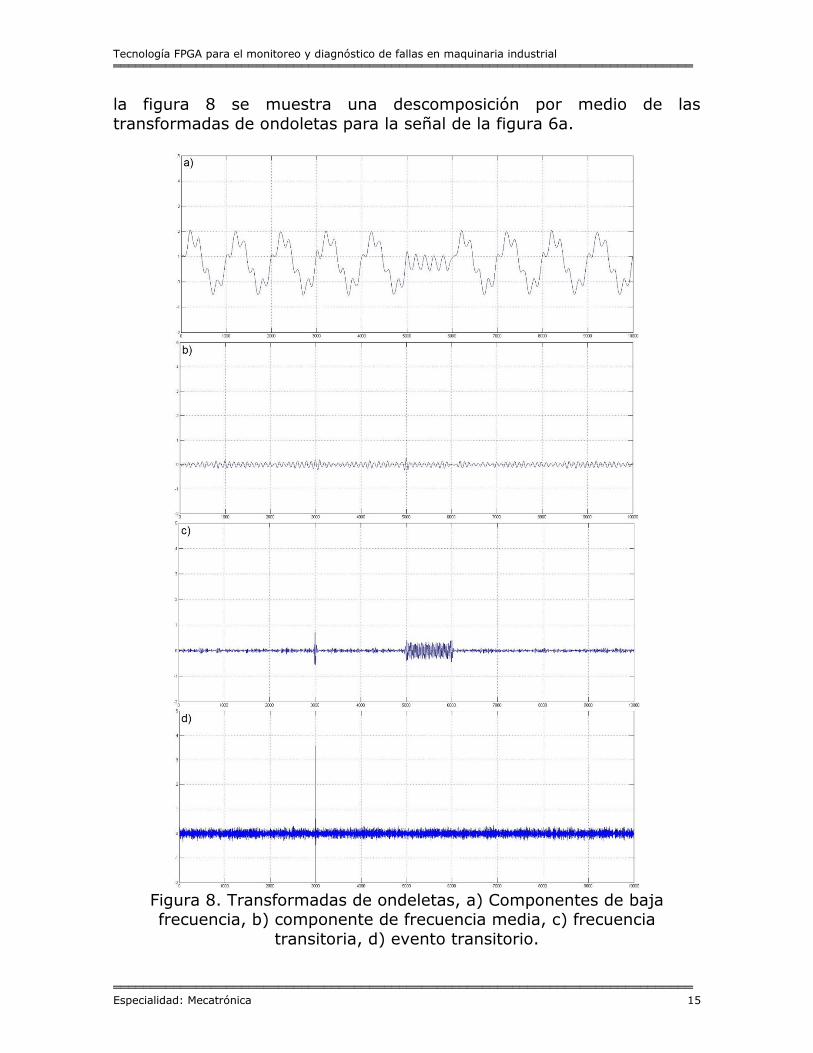
la figura 8 se muestra una descomposición por medio de las
transformadas de ondoletas para la señal de la figura 6a.
Figura 8. Transformadas de ondeletas, a) Componentes de baja frecuencia, b) componente de frecuencia media, c) frecuencia
transitoria, d) evento transitorio.

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 16
Las transformadas de ondoletas logran obtener una buena
descomposición de la señal original, aislando los armónicos principales, las frecuencias transitorias y los eventos transitorios, todos ellos en
diferentes niveles de descomposición, lo que facilita el análisis posterior
de la señal. Una cuestión que debe ser considerada cuando se realiza la descomposición por ondoletas es el hecho de que los niveles de
descomposición no reconstruyen de manera perfecta la señal e introducen distorsiones y no linealidades.
Otro método de separación de componentes de una señal es la
descomposición de modo empírico o EMD por sus siglas en inglés (empirical mode decomposition). La EMD es una técnica no lineal,
contraria a las transformadas corta de Fourier y de ondoletas, y se basa en encontrar evolventes intrínsecas de la señal original para poder
separar sus componentes en los diferentes modos, preservando sus características de tiempo y frecuencia. La figura 9 muestra la forma en
que se descompone la señal de la figura 6a en sus diferentes modos intrínsecos.
Figura 9. Descomposición de modo empírico, a) Frecuencia principal y
señal directa, b) frecuencia media, c) frecuencia superior, d) frecuencia
transitoria, e) evento transitorio y ruido.
Como se puede apreciar en la figura 9, la técnica EMD logra una mejor separación de los componentes constitutivos de la señal original; sin
embargo, esta técnica requiere un alto poder computacional para
ejecutarse y algunas aplicaciones que tengan restricción en el tiempo de
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 17
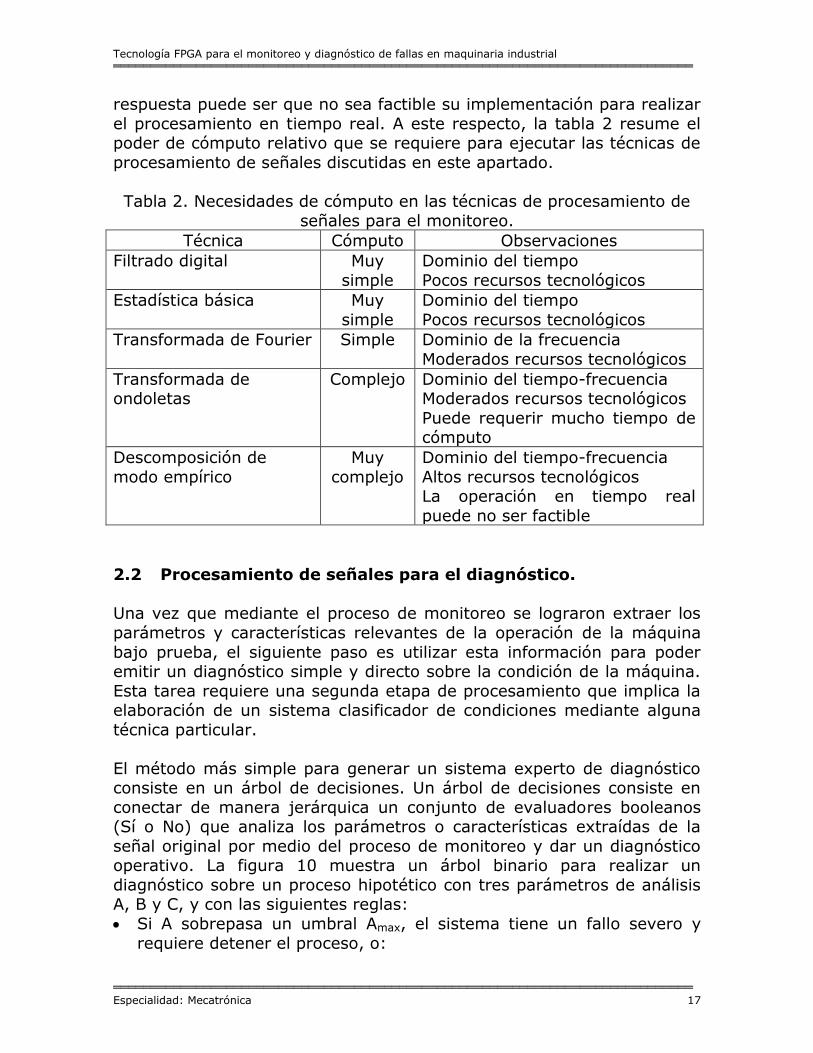
respuesta puede ser que no sea factible su implementación para realizar
el procesamiento en tiempo real. A este respecto, la tabla 2 resume el poder de cómputo relativo que se requiere para ejecutar las técnicas de
procesamiento de señales discutidas en este apartado.
Tabla 2. Necesidades de cómputo en las técnicas de procesamiento de
señales para el monitoreo.
Técnica Cómputo Observaciones
Filtrado digital Muy
simple
Dominio del tiempo
Pocos recursos tecnológicos
Estadística básica Muy
simple
Dominio del tiempo
Pocos recursos tecnológicos
Transformada de Fourier Simple Dominio de la frecuencia
Moderados recursos tecnológicos
Transformada de ondoletas
Complejo Dominio del tiempo-frecuencia Moderados recursos tecnológicos
Puede requerir mucho tiempo de cómputo
Descomposición de
modo empírico
Muy
complejo
Dominio del tiempo-frecuencia
Altos recursos tecnológicos La operación en tiempo real
puede no ser factible
2.2 Procesamiento de señales para el diagnóstico.
Una vez que mediante el proceso de monitoreo se lograron extraer los
parámetros y características relevantes de la operación de la máquina
bajo prueba, el siguiente paso es utilizar esta información para poder emitir un diagnóstico simple y directo sobre la condición de la máquina.
Esta tarea requiere una segunda etapa de procesamiento que implica la elaboración de un sistema clasificador de condiciones mediante alguna
técnica particular.
El método más simple para generar un sistema experto de diagnóstico consiste en un árbol de decisiones. Un árbol de decisiones consiste en
conectar de manera jerárquica un conjunto de evaluadores booleanos (Sí o No) que analiza los parámetros o características extraídas de la
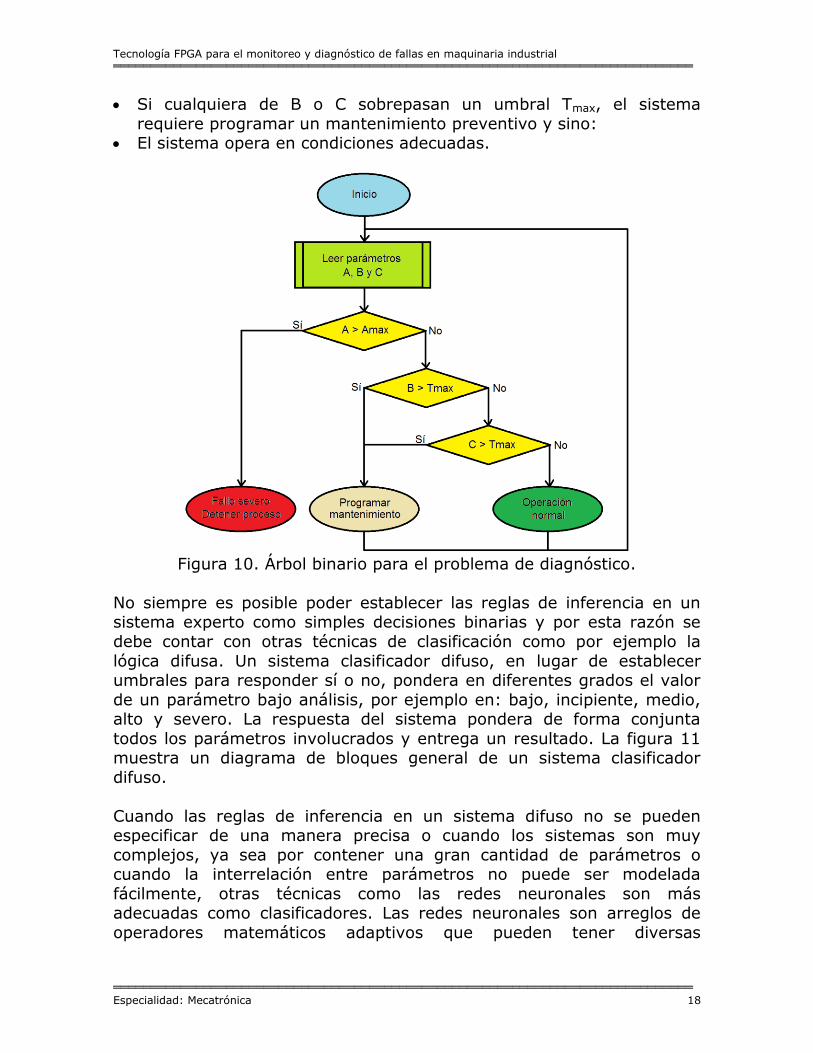
señal original por medio del proceso de monitoreo y dar un diagnóstico operativo. La figura 10 muestra un árbol binario para realizar un
diagnóstico sobre un proceso hipotético con tres parámetros de análisis A, B y C, y con las siguientes reglas:
Si A sobrepasa un umbral Amax, el sistema tiene un fallo severo y
requiere detener el proceso, o:
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 18
Si cualquiera de B o C sobrepasan un umbral Tmax, el sistema
requiere programar un mantenimiento preventivo y sino: El sistema opera en condiciones adecuadas.
Figura 10. Árbol binario para el problema de diagnóstico.
No siempre es posible poder establecer las reglas de inferencia en un sistema experto como simples decisiones binarias y por esta razón se
debe contar con otras técnicas de clasificación como por ejemplo la
lógica difusa. Un sistema clasificador difuso, en lugar de establecer umbrales para responder sí o no, pondera en diferentes grados el valor
de un parámetro bajo análisis, por ejemplo en: bajo, incipiente, medio, alto y severo. La respuesta del sistema pondera de forma conjunta
todos los parámetros involucrados y entrega un resultado. La figura 11 muestra un diagrama de bloques general de un sistema clasificador
difuso.
Cuando las reglas de inferencia en un sistema difuso no se pueden especificar de una manera precisa o cuando los sistemas son muy
complejos, ya sea por contener una gran cantidad de parámetros o cuando la interrelación entre parámetros no puede ser modelada
fácilmente, otras técnicas como las redes neuronales son más adecuadas como clasificadores. Las redes neuronales son arreglos de
operadores matemáticos adaptivos que pueden tener diversas

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 19
configuraciones, inspiradas en la interconectividad que tienen las
neuronas en los organismos vivos y contienen dos partes: la red neuronal en sí y la parte del entrenamiento de la misma. El bloque de
entrenamiento consiste en un modelo matemático que ajusta los valores
de los coeficientes de la red neuronal de tal forma que se minimice el error de la salida ante un conjunto de estímulos o entradas cuyo
resultado se conoce a priori. Una estructura de red neuronal muy utilizada es el denominado perceptrón que se muestra en la figura 12a
que consiste de una capa de entrada, una capa oculta y otra capa de salida. El número de neuronas en cada capa se determina de forma
experimental, seleccionando aquella configuración que proporcione mejores resultados. La operación matemática que realiza una neurona
es la suma ponderada de las entradas que sirve como variable de una función de activación para proporcionar la salida, como se muestra en la
figura 12b. El entrenamiento de la red neuronal se lleva a cabo mediante la estructura mostrada en la figura 12c, utilizando como
entradas un conjunto de datos cuya respuesta se conoce de antemano, ajustando los pesos ponderados mediante una función de minimización
del error.
Figura 11. Clasificador difuso general.
Existen otros clasificadores basados en máquinas de soporte vectorial y
en algoritmos bio-inspirados como algoritmos genéticos, enjambre de
partículas, colonia de hormigas, entre otros. Todos ellos tienen como característica que requieren entrenamiento como las redes neuronales,
pero el modelo del sistema es diferente.

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 20
Figura 12. Red neuronal, a) perceptrón, b) neurona, c) entrenamiento.
Al igual que los modelos de procesamiento de señales para el
monitoreo, los diferentes modelos de sistemas clasificadores para el diagnóstico tienen características de complejidad diferente, requiriendo
una mayor o menor cantidad de recursos y consumiendo más o menos
tiempo de cómputo, que combinados estos factores hacen viable o no su implementación tecnológica para ejecutarse en tiempo real. La tabla 3
muestra un resumen de las características generales de los modelos de clasificadores para diagnóstico.
Tabla 3. Características generales de los clasificadores para diagnóstico.
Clasificador Recursos necesarios
Características Principales
Árbol binario Bajo Fácil implementación
No requiere entrenamiento
Lógica difusa Bajo Necesario definir las reglas de
inferencia
Red neuronal Medio Requiere entrenamiento Produce respuestas rápidas
Máquina de soporte vectorial
Alto Requiere entrenamiento Procesamiento complejo
Modelo matemático determinístico
Algoritmos bio-inspirados
Medio - Alto Requiere entrenamiento Adecuado para sistemas complejos
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 21
3. TECNOLOGÍA FPGA PARA MONITOREO Y DIAGNÓSTICO.
Toda vez que se ha desarrollado un algoritmo que realiza el monitoreo y
diagnóstico de la condición operativa de una máquina industrial, el
siguiente paso consiste en realizar la implementación tecnológico del algoritmo para su ejecución en tiempo real y a un coste adecuado. Esta
tarea no es trivial ya que requiere manejar adecuadamente el compromiso entre la velocidad de ejecución y el costo de la plataforma
tecnológica. Una tecnología que ha tomado auge para el desarrollo de soluciones algorítmicas que sean rápidas y a un costo atractivo para
aplicaciones de monitoreo y diagnóstico en maquinaria industrial son los circuitos FPGA.
Un circuito integrado FPGA es un circuito que contiene millones de
elementos lógicos básicos (compuertas lógicas y otros elementos) cuya conectividad no está fijada previamente y el usuario tiene la capacidad
de poder definir la conectividad de los elementos para lograr la realización de los algoritmos deseados, siempre con una libertad total en
cuanto a la arquitectura de procesamiento interna que puede tener un
alto paralelismo. La característica de paralelismo en un FPGA es la que le otorga la alta velocidad de procesamiento, comparado con las
tecnologías DSP y PC, donde la arquitectura de procesamiento siempre es secuencial y con un nivel de paralelismo limitado.
Un circuito FPGA moderno contiene como elementos básicos a los
bloques lógicos BL, terminales configurables de entrada/salida IO, terminales de manejo de reloj CLK, sumadores ADD, multiplicadores
MUL, memoria de acceso aleatorio RAM y unidades de procesamiento central CPU, tal como se muestra de forma simplificada en la figura 13,
tomando en cuenta que un FPGA contiene de miles a millones de estos elementos básicos en una sola pastilla. Los bloques lógicos están
formados de algunas decenas de compuertas lógicas (AND, OR, XOR, etc.) y memorias biestables síncronas, tipo flip-flop. Las terminales IO
de un FPGA pueden ser configuradas por el diseñador para operar como
entradas, salidas, terminales bidireccionales y también seleccionar los niveles de tensión e impedancia de la terminal. Las terminales dedicadas
de reloj contienen la circuitería necesaria para distribuir de manera eficiente y con retardo mínimo la señal maestra de reloj de referencia.
Los bloques sumador y multiplicador son los elementos básicos para realizar el procesamiento algorítmico en forma paralela ya que permiten
al diseñador utilizar un sumador y un multiplicador en una estructura digital denominada multiplicador-acumulador que es la estructura básica
de un DSP y al contener cientos o miles de estas unidades en un FPGA, se logra un alto grado de paralelismo. Los FPGA también contienen
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 22
memoria interna de acceso rápido para realizar procesamiento a la
máxima velocidad posible. Finalmente, algunos modelos de FPGA ya integran microprocesadores de propósito general, prediseñados para ser
utilizados de forma inmediata en aplicaciones tales como el desarrollo de
interfaces específicas tipo USB, TCP/IP, I2C, SPI, etc.
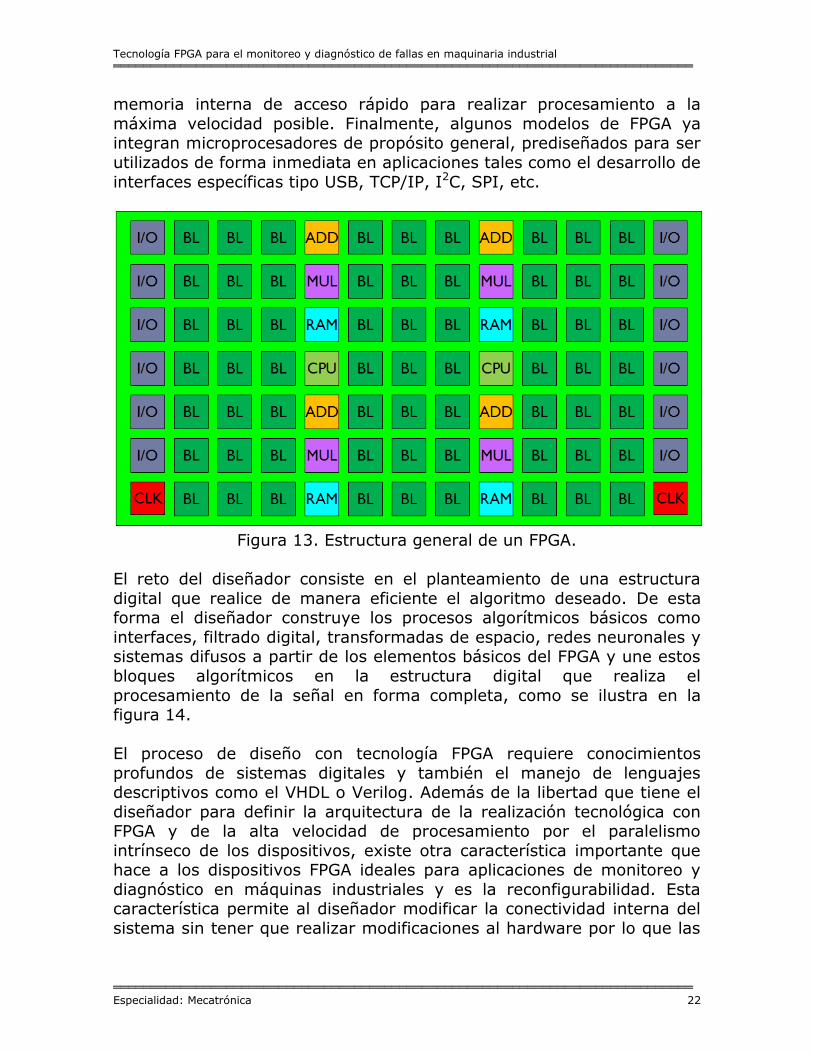
Figura 13. Estructura general de un FPGA.
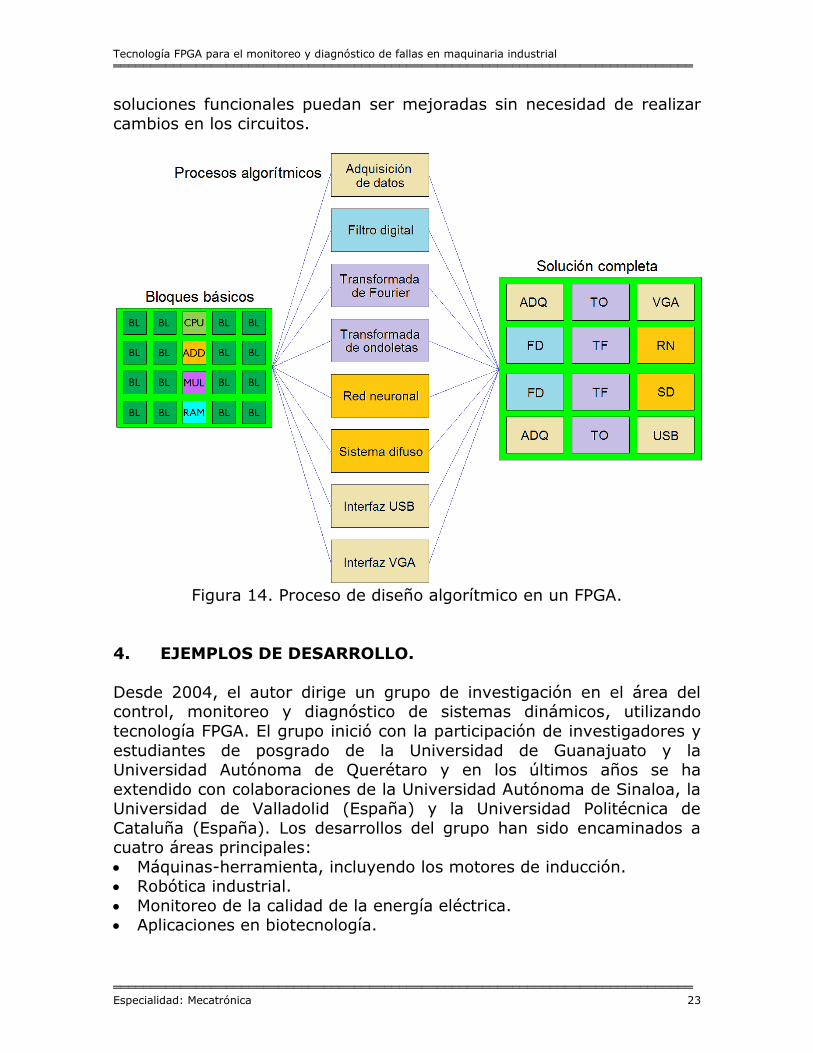
El reto del diseñador consiste en el planteamiento de una estructura
digital que realice de manera eficiente el algoritmo deseado. De esta forma el diseñador construye los procesos algorítmicos básicos como
interfaces, filtrado digital, transformadas de espacio, redes neuronales y sistemas difusos a partir de los elementos básicos del FPGA y une estos
bloques algorítmicos en la estructura digital que realiza el
procesamiento de la señal en forma completa, como se ilustra en la figura 14.
El proceso de diseño con tecnología FPGA requiere conocimientos
profundos de sistemas digitales y también el manejo de lenguajes descriptivos como el VHDL o Verilog. Además de la libertad que tiene el
diseñador para definir la arquitectura de la realización tecnológica con FPGA y de la alta velocidad de procesamiento por el paralelismo
intrínseco de los dispositivos, existe otra característica importante que hace a los dispositivos FPGA ideales para aplicaciones de monitoreo y
diagnóstico en máquinas industriales y es la reconfigurabilidad. Esta característica permite al diseñador modificar la conectividad interna del
sistema sin tener que realizar modificaciones al hardware por lo que las
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 23
soluciones funcionales puedan ser mejoradas sin necesidad de realizar
cambios en los circuitos.
Figura 14. Proceso de diseño algorítmico en un FPGA.
4. EJEMPLOS DE DESARROLLO.
Desde 2004, el autor dirige un grupo de investigación en el área del control, monitoreo y diagnóstico de sistemas dinámicos, utilizando
tecnología FPGA. El grupo inició con la participación de investigadores y
estudiantes de posgrado de la Universidad de Guanajuato y la Universidad Autónoma de Querétaro y en los últimos años se ha
extendido con colaboraciones de la Universidad Autónoma de Sinaloa, la Universidad de Valladolid (España) y la Universidad Politécnica de
Cataluña (España). Los desarrollos del grupo han sido encaminados a cuatro áreas principales:
Máquinas-herramienta, incluyendo los motores de inducción. Robótica industrial.
Monitoreo de la calidad de la energía eléctrica. Aplicaciones en biotecnología.
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 24
4.1 Aplicaciones en máquinas-herramienta.
Se han manejado tres líneas principales de aplicación de los FPGA para
el monitoreo y diagnóstico de máquinas herramienta que abarcan a las
plataformas de monitoreo de propósito general, las aplicaciones en maquinaria industrial y los desarrollos particulares al monitoreo y
diagnóstico de motores de inducción.
4.1.1 Plataformas de propósito general.
La característica de reconfigurabilidad de los dispositivos FPGA los hace ideales para el desarrollo de plataformas de arquitectura abierta para
aplicaciones en control, instrumentación, monitoreo y diagnóstico de máquinas-herramienta como es el caso de (Morales-Velazquez, 2010a)
donde se presenta el desarrollo de una plataforma reconfigurable para aplicaciones en maquinaria CNC. Esta plataforma de arquitectura abierta
tiene como finalidad el poder integrar las funciones de control, instrumentación, monitoreo y diagnóstico en una plataforma
reconfigurable que permita al usuario realizar cambios y expansiones del
sistema según sean las necesidades del mismo y que permita fácilmente la incorporación de nuevos algoritmos de análisis de señales sin tener
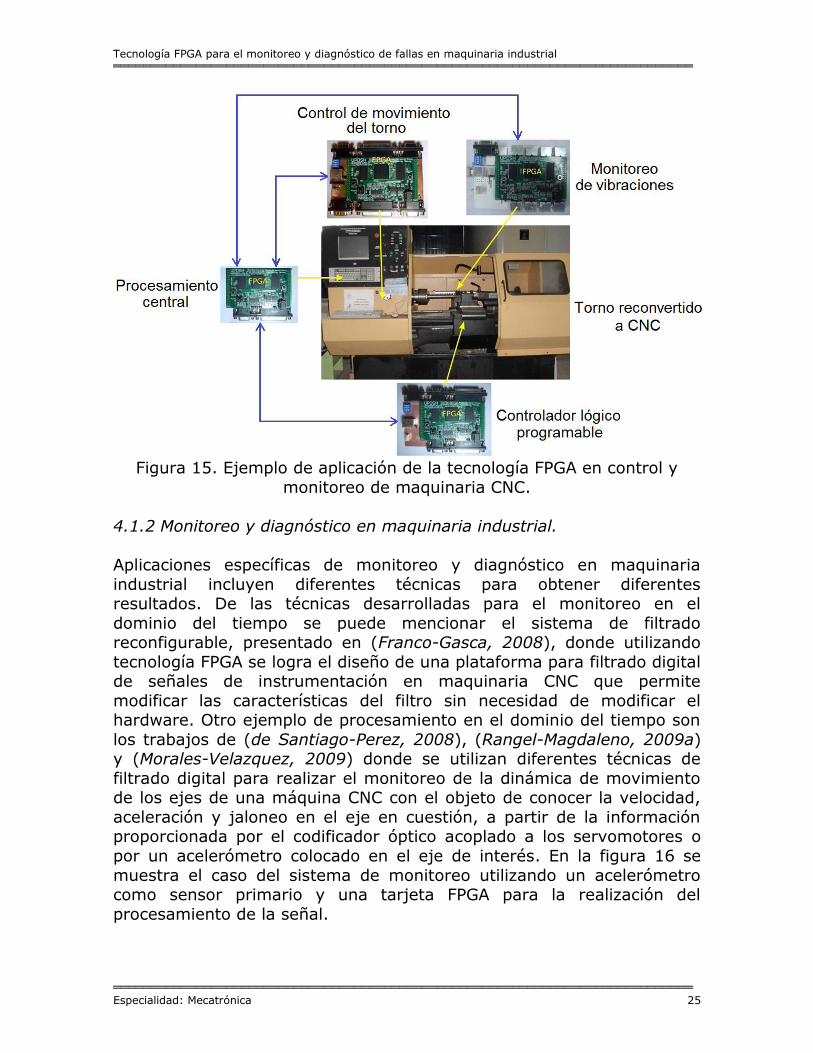
que modificar el hardware y mantener el mismo desempeño en velocidad, tal como lo muestra la figura 15 donde la plataforma de
arquitectura abierta incorpora tres módulos con dispositivos FPGA; uno conteniendo un controlador lógico programable para la reconversión a
CNC del torno, el segundo para el control del movimiento de los ejes y el tercero para realizar el monitoreo de las vibraciones durante el
maquinado. Los tres módulos FPGA se interconectan a una unidad central, también basada en tecnología FPGA, que contiene un
procesador propietario, descrito en (Morales-Velazquez, 2012) como un bloque funcional que puede ser embebido en este tipo de plataformas.
Otra aplicación de propósito general de las plataformas FPGA en
máquinas CNC es el desarrollo de sistemas de comunicación inalámbrica
entre diversos módulos de control y monitoreo a lo largo de una línea de producción que contiene varias máquinas CNC, con diferentes módulos
de control y monitoreo, tal como se desarrolla en (Moreno-Tapia, 2010). En esta aplicación se desarrolla un sistema concentrador quien coordina
el funcionamiento de un conjunto de sensores inteligentes remotos, conectados al concentrador en forma inalámbrica y donde cada módulo
sensor contiene un dispositivo FPGA para realizar procesamiento de señales sobre la variable física que se encuentre midiendo el sistema de
instrumentación del sensor.
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 25
Figura 15. Ejemplo de aplicación de la tecnología FPGA en control y
monitoreo de maquinaria CNC.
4.1.2 Monitoreo y diagnóstico en maquinaria industrial.
Aplicaciones específicas de monitoreo y diagnóstico en maquinaria
industrial incluyen diferentes técnicas para obtener diferentes resultados. De las técnicas desarrolladas para el monitoreo en el
dominio del tiempo se puede mencionar el sistema de filtrado reconfigurable, presentado en (Franco-Gasca, 2008), donde utilizando
tecnología FPGA se logra el diseño de una plataforma para filtrado digital de señales de instrumentación en maquinaria CNC que permite
modificar las características del filtro sin necesidad de modificar el hardware. Otro ejemplo de procesamiento en el dominio del tiempo son
los trabajos de (de Santiago-Perez, 2008), (Rangel-Magdaleno, 2009a) y (Morales-Velazquez, 2009) donde se utilizan diferentes técnicas de
filtrado digital para realizar el monitoreo de la dinámica de movimiento de los ejes de una máquina CNC con el objeto de conocer la velocidad,
aceleración y jaloneo en el eje en cuestión, a partir de la información proporcionada por el codificador óptico acoplado a los servomotores o
por un acelerómetro colocado en el eje de interés. En la figura 16 se
muestra el caso del sistema de monitoreo utilizando un acelerómetro como sensor primario y una tarjeta FPGA para la realización del
procesamiento de la señal.

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 26
Figura 16. Monitoreo de la dinámica de movimiento en un eje utilizando
acelerómetro y FPGA, a) Sensor, b) FPGA.
El monitoreo de la dinámica de movimiento en los ejes de una máquina
CNC, y su subsecuente parametrización, pueden ser utilizados para mejorar los procesos de manufactura mediante la optimización de
trayectorias que minimicen el error y mejoren los acabados de las piezas maquinadas. Ejemplos de estas mejoras se tienen en (de Santiago-
Perez, 2010) donde se optimiza la velocidad de avance en tornos y fresadoras mediante trayectorias polinomiales. Por otro lado, en (Rivera-
Guillen, 2010) se logra la reducción del error de seguimiento en ejes de máquinas CNC y en (Rivera-Guillen, 2011) se obtiene una reducción del
jaloneo mediante el uso de trayectorias polinomiales de movimiento. Un
procesador general de diferentes tipos de aproximación polinomial basado en FPGA se desarrolla en (de Santiago-Perez, 2013). La versión
que contiene múltiples ejes coordinados se realiza en (Jaen-Cuellar, 2012) como se muestra en la figura 17. El software de diseño contiene
los algoritmos para generar las trayectorias optimizadas para la reducción de las vibraciones y limitación del jaloneo durante el proceso
de maquinado de la pieza deseada y el controlador basado en FPGA se encarga de coordinar los movimientos de los tres ejes en el caso de la
fresadora mostrada, de acuerdo con las trayectorias calculadas.
Las técnicas de procesamiento en el dominio de la frecuencia y en el espacio tiempo-frecuencia han sido utilizadas ampliamente en tiempos
recientes para realizar diagnóstico de la condición operativa en máquinas-herramienta. En (Romero-Troncoso, 2004) se desarrolla un
sistema de detección de ruptura de la herramienta de corte en un
proceso de fresado por medio de la transformada de ondoletas, aplicada a la señal de corriente de los servomotores que mueven la bancada. Más
adelante, (Franco-Gasca, 2009) extiende los resultados al proceso de taladrado y (Trejo-Hernandez, 2010) lleva más allá los resultados para
llegar a estimar el grado de desgaste de la herramienta de corte

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 27
mediante el proceso algorítmico descrito en la figura 18, utilizando
fusión de sensores tanto de vibraciones en la bancada como de corriente de los servomotores.
Figura 17. Sistema de generación de trayectorias para reducir el jaloneo
y las vibraciones en ejes múltiples de máquinas CNC.
Figura 18. Proceso algorítmico para estimar el grado de desgaste de una
herramienta de corte en un proceso de maquinado.

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 28
Sistemas reconfigurables para el monitoreo y diagnóstico que operan en
el dominio de la frecuencia y del espacio tiempo-frecuencia han sido desarrollados por (Rangel-Magdaleno, 2010) quienes hacen uso de la
transformada de Fourier y la transformada de ondoletas a señales de
vibraciones. Más adelante (Romero-Troncoso, 2012) diseñan un sensor inteligente reconfigurable utilizando la transformada de ondoletas en
paquete como se muestra en la figura 19 en dos configuraciones posibles del instrumento.
Figura 19. Sensor inteligente con procesamiento de paquete de
ondoletas, a) desplegado en monitor VGA, b) desplegado en LCD.
Los sistemas FPGA también han sido utilizados para mejorar otros
procesos industriales. Por ejemplo, una aplicación al control y monitoreo de una máquina inyectora de plástico de la tecnología FPGA mediante un
procesador de aplicación específica se muestra en (Munoz-Barron, 2012). En (Granados-Lieberman, 2014) se analizan los efectos en la
reducción del torque del husillo ante caídas de voltaje en la alimentación y en (Granados-Lieberman, 2013a) se estudian los efectos de
interacción entre diversas máquinas que se encuentran alimentadas por la misma línea y cómo se afectan los procesos de maquinado con los
transitorios que ocurren en estas máquinas. Otra aplicación de los FPGA es en el desarrollo de sistemas de compresión de datos para almacenar
señales ultrasónicas en el monitoreo de grietas en tuberías como se muestra en (Soto-Cajiga, 2012).
Sistemas expertos para la clasificación de fallos en maquinaria industrial han sido desarrollados en (Carino-Corrales, 2014) donde se hace uso de
dos tipos de clasificadores, máquinas de soporte vectorial y análisis de componentes principales, para lograr mejorar la eficiencia en la
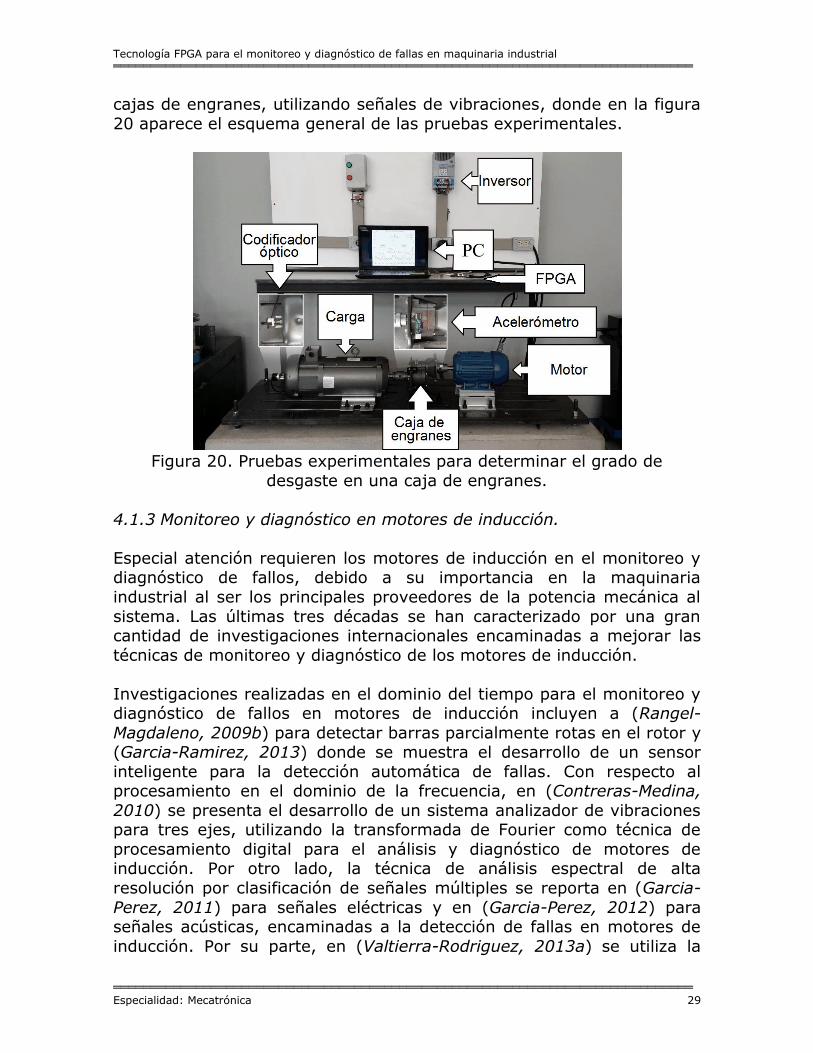
clasificación de fallas en maquinaria cuando se presentan zonas conflictivas de decisión. Por otro lado, (Saucedo-Gallaga, 2014)
desarrollan un sistema experto para determinar el grado de desgaste en
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 29
cajas de engranes, utilizando señales de vibraciones, donde en la figura
20 aparece el esquema general de las pruebas experimentales.
Figura 20. Pruebas experimentales para determinar el grado de
desgaste en una caja de engranes.
4.1.3 Monitoreo y diagnóstico en motores de inducción.
Especial atención requieren los motores de inducción en el monitoreo y diagnóstico de fallos, debido a su importancia en la maquinaria
industrial al ser los principales proveedores de la potencia mecánica al
sistema. Las últimas tres décadas se han caracterizado por una gran cantidad de investigaciones internacionales encaminadas a mejorar las
técnicas de monitoreo y diagnóstico de los motores de inducción.
Investigaciones realizadas en el dominio del tiempo para el monitoreo y diagnóstico de fallos en motores de inducción incluyen a (Rangel-
Magdaleno, 2009b) para detectar barras parcialmente rotas en el rotor y (Garcia-Ramirez, 2013) donde se muestra el desarrollo de un sensor
inteligente para la detección automática de fallas. Con respecto al procesamiento en el dominio de la frecuencia, en (Contreras-Medina,
2010) se presenta el desarrollo de un sistema analizador de vibraciones para tres ejes, utilizando la transformada de Fourier como técnica de
procesamiento digital para el análisis y diagnóstico de motores de inducción. Por otro lado, la técnica de análisis espectral de alta
resolución por clasificación de señales múltiples se reporta en (Garcia-
Perez, 2011) para señales eléctricas y en (Garcia-Perez, 2012) para señales acústicas, encaminadas a la detección de fallas en motores de
inducción. Por su parte, en (Valtierra-Rodriguez, 2013a) se utiliza la

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 30
transformada de Hilbert como técnica de análisis en frecuencia para la
detección de fallas. Técnicas combinadas de análisis espectral de alta resolución se emplean en (Romero-Troncoso, 2013) y en (Romero-
Troncoso, 2014) para la detección temprana de fallas en motores de
inducción, cuando la alimentación es proporcionada por un inversor, el cual introduce armónicos indeseables a la señal de corriente eléctrica y
hace más difícil el proceso de detección de fallas tal como se muestra en los espectrogramas de la figura 21. En esta figura se muestran los casos
de un motor sano en comparación con un motor que tiene una barra rota en el rotor y cómo ésta afecta el patrón del espectro; también se
aprecian los armónicos que introduce el inversor.
Figura 21. Espectrograma de un motor de inducción alimentado por
inversor, a) sano, b) con una barra rota.
Técnicas de descomposición tiempo-frecuencia también han sido
utilizadas para el monitoreo y diagnóstico de fallas en motores de inducción, siendo pionero el trabajo de (Ordaz-Moreno, 2008) donde se
utiliza la transformada de ondolotas para señales de corriente eléctrica, mientras que en (Rodriguez-Donate, 2011a) la transformada de
ondoletas se aplica a señales de vibraciones, mientras que en (Millan-Almaraz, 2011) se aplica el análisis bajo condiciones de alimentación por
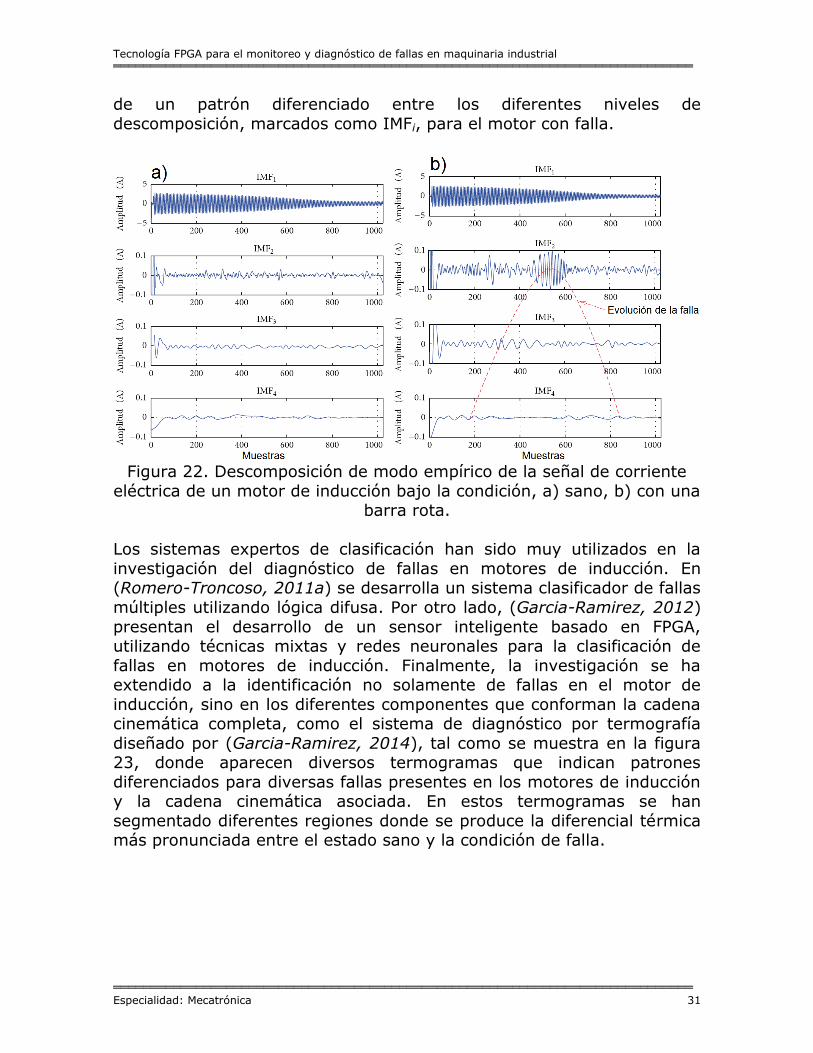
inversor. Por otro lado, en (Camarena-Martinez, 2014) se realiza el monitoreo y diagnóstico de la condición del motor de inducción mediante
la descomposición en modo empírico. En la figura 22 se muestra la descomposición de la señal de corriente eléctrica para los casos de un
motor sano y de un motor con una barra rota y se observa la presencia
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 31
de un patrón diferenciado entre los diferentes niveles de
descomposición, marcados como IMFi, para el motor con falla.
Figura 22. Descomposición de modo empírico de la señal de corriente
eléctrica de un motor de inducción bajo la condición, a) sano, b) con una barra rota.
Los sistemas expertos de clasificación han sido muy utilizados en la
investigación del diagnóstico de fallas en motores de inducción. En (Romero-Troncoso, 2011a) se desarrolla un sistema clasificador de fallas
múltiples utilizando lógica difusa. Por otro lado, (Garcia-Ramirez, 2012)
presentan el desarrollo de un sensor inteligente basado en FPGA, utilizando técnicas mixtas y redes neuronales para la clasificación de
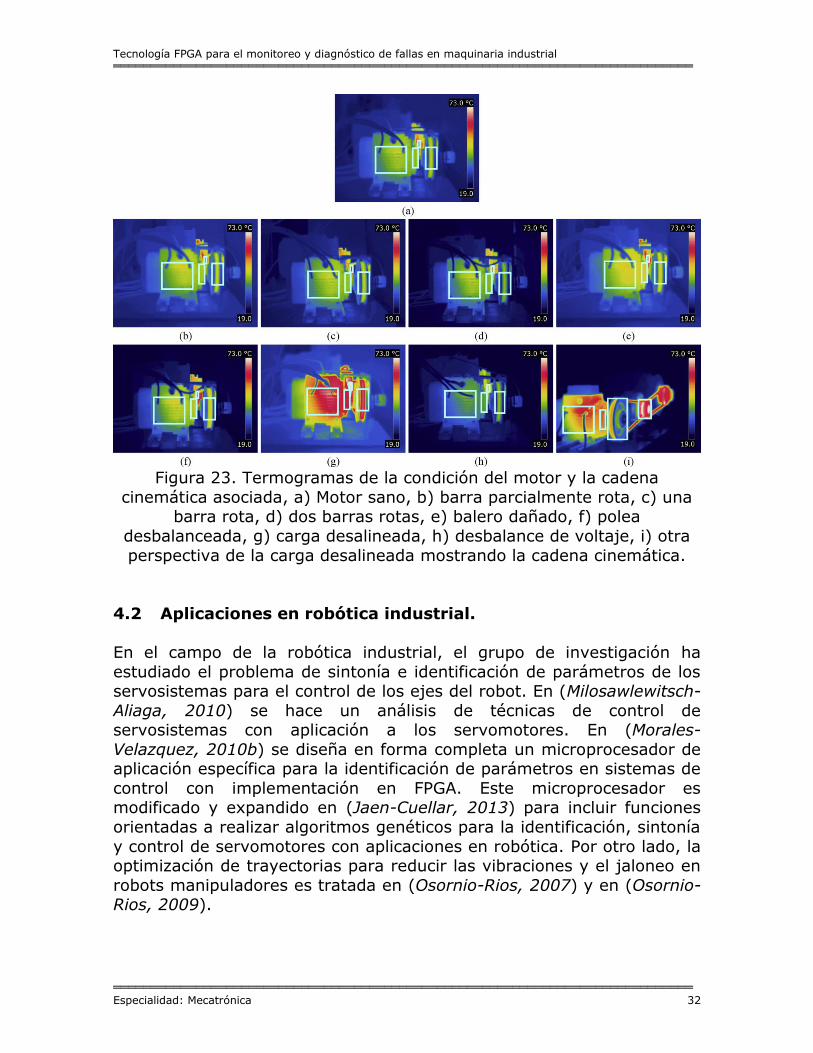
fallas en motores de inducción. Finalmente, la investigación se ha extendido a la identificación no solamente de fallas en el motor de
inducción, sino en los diferentes componentes que conforman la cadena cinemática completa, como el sistema de diagnóstico por termografía
diseñado por (Garcia-Ramirez, 2014), tal como se muestra en la figura 23, donde aparecen diversos termogramas que indican patrones
diferenciados para diversas fallas presentes en los motores de inducción y la cadena cinemática asociada. En estos termogramas se han
segmentado diferentes regiones donde se produce la diferencial térmica más pronunciada entre el estado sano y la condición de falla.
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 32
Figura 23. Termogramas de la condición del motor y la cadena
cinemática asociada, a) Motor sano, b) barra parcialmente rota, c) una barra rota, d) dos barras rotas, e) balero dañado, f) polea
desbalanceada, g) carga desalineada, h) desbalance de voltaje, i) otra
perspectiva de la carga desalineada mostrando la cadena cinemática.
4.2 Aplicaciones en robótica industrial.
En el campo de la robótica industrial, el grupo de investigación ha
estudiado el problema de sintonía e identificación de parámetros de los servosistemas para el control de los ejes del robot. En (Milosawlewitsch-
Aliaga, 2010) se hace un análisis de técnicas de control de servosistemas con aplicación a los servomotores. En (Morales-
Velazquez, 2010b) se diseña en forma completa un microprocesador de aplicación específica para la identificación de parámetros en sistemas de
control con implementación en FPGA. Este microprocesador es modificado y expandido en (Jaen-Cuellar, 2013) para incluir funciones
orientadas a realizar algoritmos genéticos para la identificación, sintonía
y control de servomotores con aplicaciones en robótica. Por otro lado, la optimización de trayectorias para reducir las vibraciones y el jaloneo en
robots manipuladores es tratada en (Osornio-Rios, 2007) y en (Osornio-Rios, 2009).
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 33
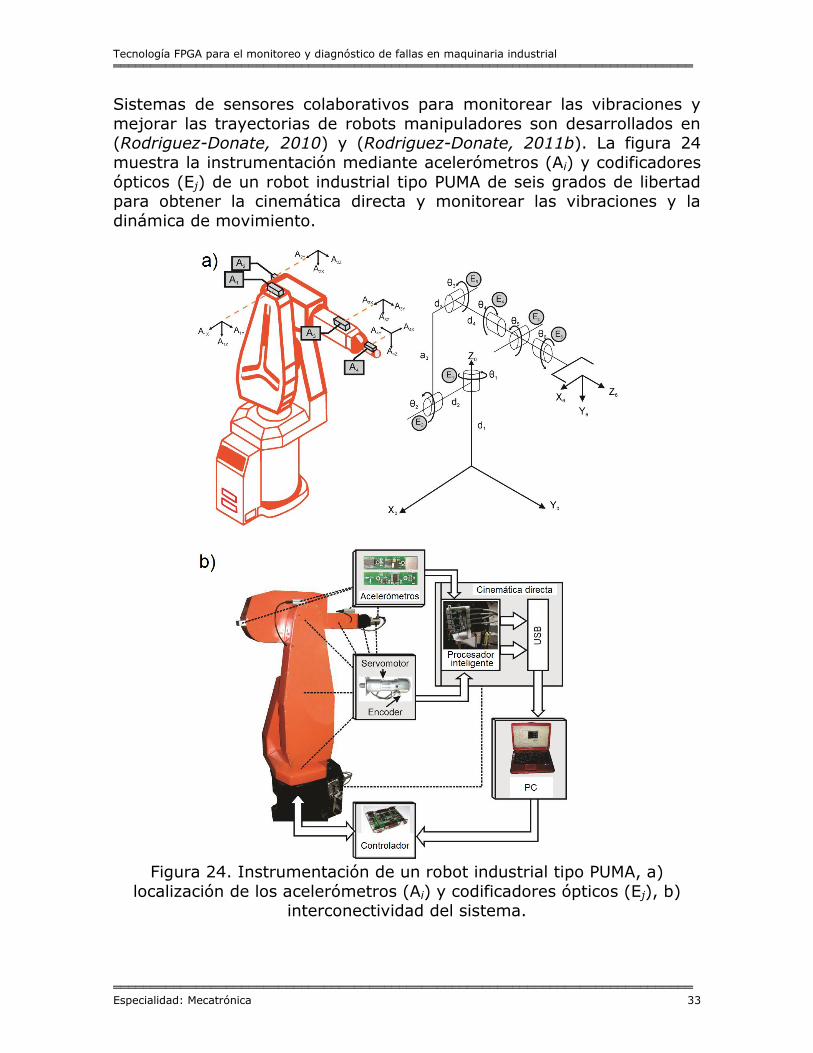
Sistemas de sensores colaborativos para monitorear las vibraciones y
mejorar las trayectorias de robots manipuladores son desarrollados en (Rodriguez-Donate, 2010) y (Rodriguez-Donate, 2011b). La figura 24
muestra la instrumentación mediante acelerómetros (Ai) y codificadores
ópticos (Ej) de un robot industrial tipo PUMA de seis grados de libertad para obtener la cinemática directa y monitorear las vibraciones y la
dinámica de movimiento.
Figura 24. Instrumentación de un robot industrial tipo PUMA, a)
localización de los acelerómetros (Ai) y codificadores ópticos (Ej), b) interconectividad del sistema.

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 34
4.3 Aplicaciones en la calidad de la energía eléctrica.
El monitoreo de la línea de alimentación eléctrica en los diferentes
procesos industriales ha cobrado gran importancia en los últimos años,
debido a la creciente demanda en el suministro y a la interconexión de diversas fuentes generadoras a la red común. Un análisis del estado del
arte de las técnicas utilizadas para el monitoreo de disturbios eléctricos y calidad de la energía se presenta en (Granados-Lieberman, 2011). La
investigación alrededor del monitoreo de la calidad de la energía ha tomado diversas vertientes, siendo una de ellas el monitoreo preciso de
la frecuencia de la línea, como el sensor inteligente desarrollado en (Granados-Lieberman, 2009) y las técnicas de alta resolución
presentadas en (Romero-Troncoso, 2011b).
Otra de las vertientes de investigación y desarrollo tecnológico sobre el monitoreo de la calidad de la energía se tiene en el diseño y
construcción de equipos especializados para el monitoreo y análisis de disturbios eléctricos contenidos en la línea de suministro. Una técnica
que permite distinguir y clasificar los diferentes disturbios eléctricos que
aparecen en la línea, definidos por las normas internacionales, ha sido desarrollado en (Valtierra-Rodriguez, 2014). Instrumentos específicos
para el monitoreo de la calidad de la energía eléctrica y la detección y clasificación de disturbios han sido diseñados en (Granados-Lieberman,
2013b) donde se utiliza la transforma Hilbert y redes neuronales para desarrollar un sensor inteligente que permite monitorear la calidad de la
energía y detectar, cuantificar y clasificar diversos disturbios eléctricos en tiempo real como se muestra en la figura 25..
Figura 25. Sensor inteligente para el monitoreo de la calidad de la
energía y clasificación de disturbios eléctricos, a) aspecto general de las pruebas, b) componentes del sensor inteligente.
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 35
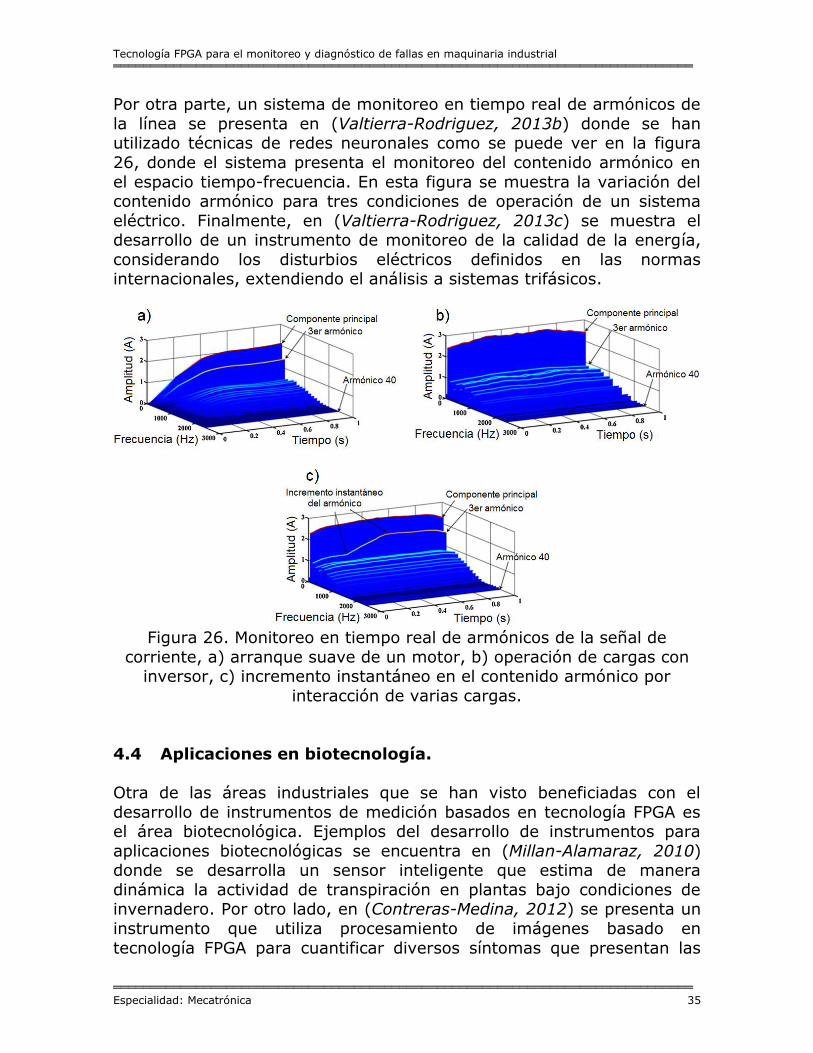
Por otra parte, un sistema de monitoreo en tiempo real de armónicos de
la línea se presenta en (Valtierra-Rodriguez, 2013b) donde se han utilizado técnicas de redes neuronales como se puede ver en la figura
26, donde el sistema presenta el monitoreo del contenido armónico en
el espacio tiempo-frecuencia. En esta figura se muestra la variación del contenido armónico para tres condiciones de operación de un sistema
eléctrico. Finalmente, en (Valtierra-Rodriguez, 2013c) se muestra el desarrollo de un instrumento de monitoreo de la calidad de la energía,
considerando los disturbios eléctricos definidos en las normas internacionales, extendiendo el análisis a sistemas trifásicos.
Figura 26. Monitoreo en tiempo real de armónicos de la señal de
corriente, a) arranque suave de un motor, b) operación de cargas con inversor, c) incremento instantáneo en el contenido armónico por
interacción de varias cargas.
4.4 Aplicaciones en biotecnología.
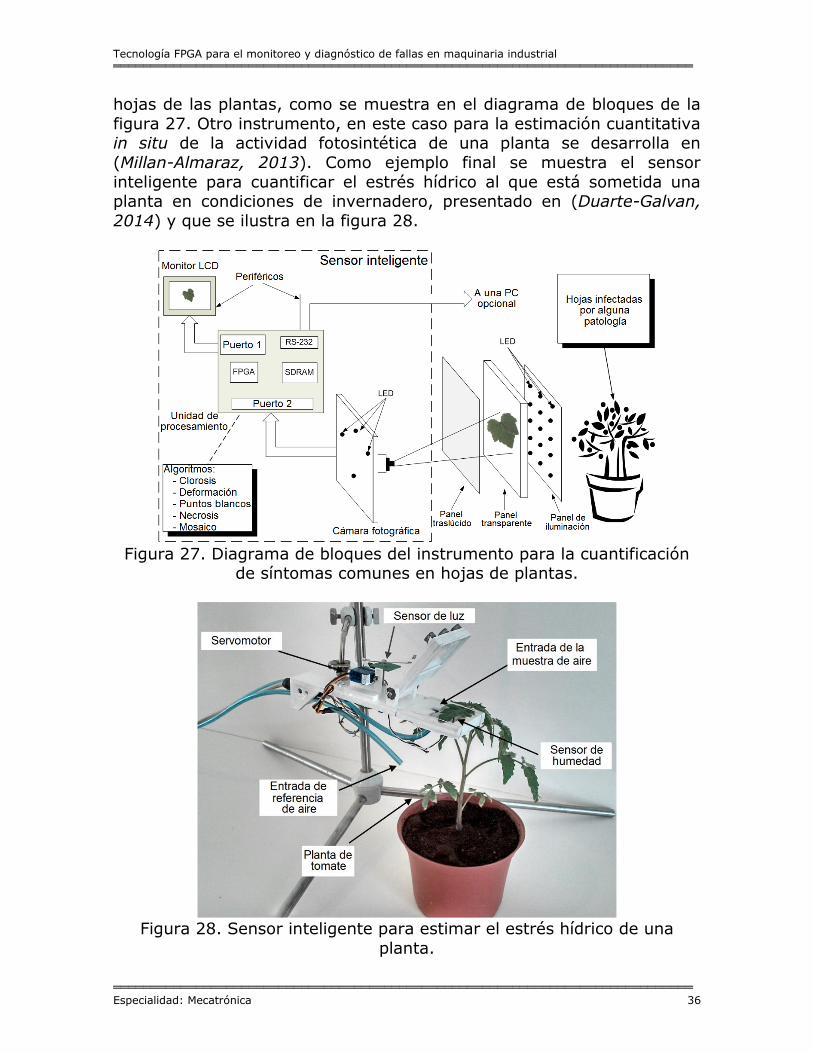
Otra de las áreas industriales que se han visto beneficiadas con el
desarrollo de instrumentos de medición basados en tecnología FPGA es el área biotecnológica. Ejemplos del desarrollo de instrumentos para
aplicaciones biotecnológicas se encuentra en (Millan-Alamaraz, 2010) donde se desarrolla un sensor inteligente que estima de manera
dinámica la actividad de transpiración en plantas bajo condiciones de invernadero. Por otro lado, en (Contreras-Medina, 2012) se presenta un
instrumento que utiliza procesamiento de imágenes basado en
tecnología FPGA para cuantificar diversos síntomas que presentan las
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 36
hojas de las plantas, como se muestra en el diagrama de bloques de la
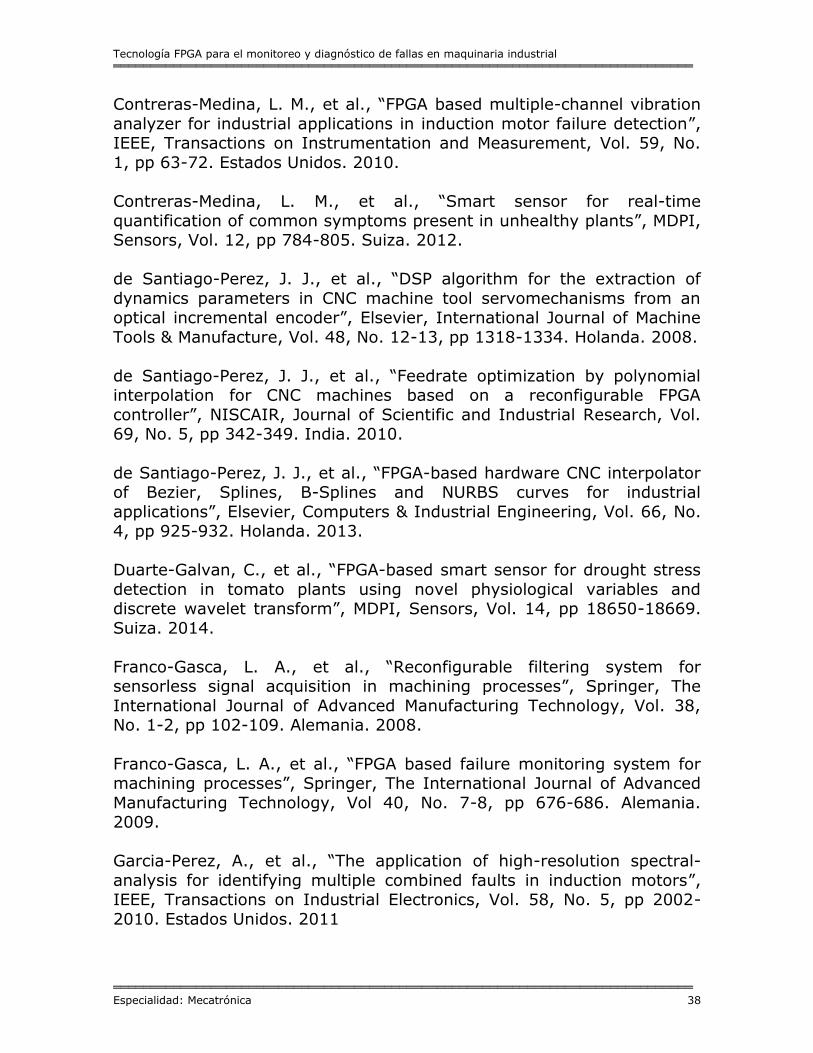
figura 27. Otro instrumento, en este caso para la estimación cuantitativa in situ de la actividad fotosintética de una planta se desarrolla en
(Millan-Almaraz, 2013). Como ejemplo final se muestra el sensor
inteligente para cuantificar el estrés hídrico al que está sometida una planta en condiciones de invernadero, presentado en (Duarte-Galvan,
2014) y que se ilustra en la figura 28.
Figura 27. Diagrama de bloques del instrumento para la cuantificación
de síntomas comunes en hojas de plantas.
Figura 28. Sensor inteligente para estimar el estrés hídrico de una
planta.

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 37
5. CONCLUSIONES.
El monitoreo y diagnóstico en maquinaria industrial es un problema
importante para atender en la industria moderna y es necesario contar
con recursos humanos especializados en el desarrollo y aplicación de técnicas avanzadas para realizar esta tarea. Es responsabilidad de los
profesionales dedicados a la educación superior e investigación el formar las nuevas generaciones de ingenieros que sean capaces de
incorporarse a la industria nacional para atender los problemas de productividad mediante la correcta aplicación de las metodologías de
monitoreo y diagnóstico, utilizando las herramientas tecnológicas más adecuadas, como por ejemplo los dispositivos FPGA.
Las aplicaciones de la tecnología FPGA no se restringe al desarrollo de
sistemas de monitoreo y diagnóstico, sino que es una tecnología que puede ser aplicada a diversos campos industriales como el control y la
instrumentación. Las Universidades mexicanas deberán incorporar el estudio de esta tecnología en su currículum para las carreras de
ingeniería en mecatrónica, electrónica, electromecánica y afines, para
poder contar con recursos humanos que resuelvan problemas industriales con las tecnologías de punta.
Asimismo es importante contar con grupos de investigación que
contribuyan con la generación del conocimiento en el área del monitoreo y diagnóstico industrial mediante el desarrollo de nuevas metodologías
de procesamiento de señales, sistemas expertos y diseño de equipo especializado. A la par, estos grupos de investigación deberán
comprometerse en la formación de recursos humanos que conformarán las generaciones de reemplazo dentro de la especialidad.
REFERENCIAS.
Camarena-Martinez, D., et al., “Empirical mode decomposition and
neural networks on FPGA for fault diagnosis in induction motors”, Hindawi, The Scientific World Journal, Vol. 2014, Article ID 908140.
Estados Unidos. 2014.
Carino, J. A., et al., “Hierarchical classification scheme based on identification, isolation and analysis of conflictive regions”, IEEE,
Proceedings of the 19th Conference on Emerging Technology and Factory Automation ETFA, pp 1-8. Barcelona, Spain. 2014.
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 38
Contreras-Medina, L. M., et al., “FPGA based multiple-channel vibration
analyzer for industrial applications in induction motor failure detection”, IEEE, Transactions on Instrumentation and Measurement, Vol. 59, No.
1, pp 63-72. Estados Unidos. 2010.
Contreras-Medina, L. M., et al., “Smart sensor for real-time
quantification of common symptoms present in unhealthy plants”, MDPI, Sensors, Vol. 12, pp 784-805. Suiza. 2012.
de Santiago-Perez, J. J., et al., “DSP algorithm for the extraction of
dynamics parameters in CNC machine tool servomechanisms from an optical incremental encoder”, Elsevier, International Journal of Machine
Tools & Manufacture, Vol. 48, No. 12-13, pp 1318-1334. Holanda. 2008.
de Santiago-Perez, J. J., et al., “Feedrate optimization by polynomial interpolation for CNC machines based on a reconfigurable FPGA
controller”, NISCAIR, Journal of Scientific and Industrial Research, Vol. 69, No. 5, pp 342-349. India. 2010.
de Santiago-Perez, J. J., et al., “FPGA-based hardware CNC interpolator of Bezier, Splines, B-Splines and NURBS curves for industrial
applications”, Elsevier, Computers & Industrial Engineering, Vol. 66, No. 4, pp 925-932. Holanda. 2013.
Duarte-Galvan, C., et al., “FPGA-based smart sensor for drought stress
detection in tomato plants using novel physiological variables and discrete wavelet transform”, MDPI, Sensors, Vol. 14, pp 18650-18669.
Suiza. 2014.
Franco-Gasca, L. A., et al., “Reconfigurable filtering system for sensorless signal acquisition in machining processes”, Springer, The
International Journal of Advanced Manufacturing Technology, Vol. 38, No. 1-2, pp 102-109. Alemania. 2008.
Franco-Gasca, L. A., et al., “FPGA based failure monitoring system for machining processes”, Springer, The International Journal of Advanced
Manufacturing Technology, Vol 40, No. 7-8, pp 676-686. Alemania. 2009.
Garcia-Perez, A., et al., “The application of high-resolution spectral-
analysis for identifying multiple combined faults in induction motors”, IEEE, Transactions on Industrial Electronics, Vol. 58, No. 5, pp 2002-
2010. Estados Unidos. 2011
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 39
Garcia-Perez, A., et al., “Application of high-resolution spectral-analysis
for identifying faults in induction motors by means of sound”, SAGE, Journal of Vibration and Control, Vol. 18, No. 11, pp 1585-1592. Estados
Unidos. 2012
Garcia-Ramirez, A. G., et al., “Smart sensor for online detection of
multiple-combined faults in VSD-fed induction motors”, MDPI, Sensors, Vol. 12, pp 11989-12005. Suiza. 2012.
Garcia-Ramirez, A., et al., “FPGA-based smart-sensor for fault detection
in VSD-fed induction motors”, IEEE, Proceedings of the 9th IEEE International Simposium on Diagnostics of Electrical Machines, Power
Electronics & Drives SDEMPED, pp 313-320. Valencia, España. 2013.
Garcia-Ramirez, A. G., et al., “Fault detection in induction motors and the impact on the kinematic chain through thermographic analysis”,
Elsevier, Electric Power Systems Research, Vol. 114, pp 1-9. Holanda. 2014.
Granados-Lieberman, D., et al., “A real-time smart sensor for high-resolution frequency estimation in power systems”, MDPI, Sensors, Vol.
9, No. 9, pp 7412-7429. Suiza. 2009.
Granados-Lieberman, D., et al., “Techniques and methodologies for power quality analysis and disturbances classification in power systems:
a review”, IET, Generation, Transmission and Distribution, Vol. 5, No. 4, pp 519-529. Reino Unido. 2011.
Granados-Lieberman, D., et al., “Voltage drop repercussions in torque
spindle for turning processes due to the interaction of several industrial machines in a manufacturing cell”, NISCAIR, Journal of Scientific and
Industrial Research, Vol. 72, No. 12, pp 746-753. India. 2013a.
Granados-Lieberman, D., et al., “A Hilbert transform-based smart
sensor for detection, classification, and quantification of power quality disturbances”, MDPI, Sensors, Vol. 13, pp 5507-5527. Suiza. 2013b.
Granados-Lieberman, D., et al., “Torque reduction and workpiece
finishing effects due to voltage sags in turning processes”, SAGE, Proceedings of the Institution of Mechanical Engineers, Part B: Journal of
Engineering Manufacture, Vol. 228, No. 1, pp 140-148. Estados Unidos. 2014.
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 40
Jaen-Cuellar, A. Y., et al., “A hardware–software system for coordinated
multi-axis control based on a non uniform rational B-splines interpolator applied to industrial computer numerically controlled machines”, SAGE,
Proceedings of the Institution of Mechanical Engineers, Part I, Journal of
Systems and Control Engineering, Vol. 226, No. 6, pp 831-840. Estados Unidos. 2012.
Jaen-Cuellar, A. Y., et al., “PID-controller tuning optimization with
genetic algorithms in servo systems”, InTech, International Journal of Advanced Robotics Systems, Vol. 10, No. 324, pp 1-14. Croacia. 2013.
Mekid, S., et al., “Beyond intelligent manufacturing: A new generation of
flexible intelligent NC machines”, Elsevier, Mechanism and Machine Theory, Vol. 44, pp. 466-476. Holanda. 2009.
Millan-Almaraz, J. R., et al., “FPGA-based fused smart sensor for real-
time plant-transpiration dynamic estimation”, MDPI, Sensors, Vol. 10, No. 9, pp 8316-8331. Suiza. 2010.
Millan-Almaraz, J. R., et al., “Wavelet based methodology for broken bar detection in induction motors with variable speed drive”, Taylor and
Francis, Electric Power Components and Systems, Vol. 39, No. 3, pp 271-287. Estados Unidos. 2011.
Millan-Almaraz, J. R., et al., “FPGA-based wireless smart sensor for real-
time photosynthesis monitoring”, Elsevier, Computers and Electronics in Agriculture, Vol. 95, pp 58-69. Holanda. 2013.
Milosawlewitsch-Aliaga, M., et al., “Model-based iterative feedback
tuning for industrial PID controllers”, NISCAIR, Journal of Scientific and Industrial Research, Vol. 69, No. 12, pp 930-936. India. 2010
Morales-Velazquez, L., et al., Sensorless jerk monitoring using an
adaptive antisymmetric high-order FIR filter, Elsevier, Mechanical
Systems and Signal Processing, Vol. 23, No. 7, pp 2383-2394. Holanda. 2009.
Morales-Velazquez, L., et al., “Open-architecture system based on a
reconfigurable hardware-software multi-agent platform for CNC machines”, Elsevier, Journal of Systems Architecture, Vol. 56, No. 9, pp
407-418. Holanda. 2010a.
Morales-Velazquez, L., et al., “Special purpose processor for parameter identification of CNC second order servo systems on a low-cost FPGA

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 41
platform”, Elsevier, Mechatronics, Vol. 20, No. 2, pp 265-272. Holanda.
2010b.
Morales-Velazquez, et al., “FPGA embedded single-cycle 16-bit
microprocessor and tools”, IEEE, Proceedings of the International Conference on Reconfigurable Computing and FPGAs RECONFIG, pp 1-6,
Cancún, México. 2012.
Moreno-Tapia, S. V., et al., “A field programmable gate array-based reconfigurable smart-sensor network for wireless monitoring of new
generation computer numerically controlled machines”, MDPI, Sensors, Vol. 10, No. 8, pp 7263-7286. Suiza. 2010.
Munoz-Barron, B., et al., “FPGA-based multiprocessor system for
injection molding control”, MDPI, Sensors, Vol. 12, No. 10, pp 14068-14083. Suiza. 2012.
Ordaz-Moreno, A., et al., “Automatic online diagnosis algorithm for
broken-bar detection on induction motors based on discrete wavelet
transform for FPGA implementation”, IEEE, Transactions on Industrial Electronics, Vol. 55, No. 5, pp 2193-2201. Estados Unidos. 2008.
Osornio-Rios, R. A., et al., “Computationally efficient parametric analysis
of discrete-time polynomial based acceleration–deceleration profile generation for industrial robotics and CNC machinery”, Elsevier,
Mechatronics, Vol. 17, No. 9, pp 511-523. Holanda. 2007.
Osornio-Rios, R. A., et al., “FPGA implementation of higher degree polynomial acceleration profiles for peak jerk reduction in servomotors”,
Elsevier, Robotics and Computer-Integrated Manufacturing, Vol. 25, No. 2, pp 379-392. Holanda. 2009.
Rangel-Magdaleno, J. J., et al., “Novel oversampling technique for
improving signal-to-quantization noise ratio on accelerometer-based
smart jerk sensor in CNC applications”, MDPI, Sensors, Vol. 9, No. 5, pp 3767-3789. Suiza. 2009a.
Rangel-Magdaleno, J. J., et al., “Novel methodology for online half-
broken-bar detection on induction motors”, IEEE, Transactions on Instrumentation and Measurement, Vol. 58, No. 5, pp 1690-1698.
Estados Unidos. 2009b.
Rangel-Magdaleno, et al., “FPGA-based vibration analyzer for continuous CNC machinery monitoring with fused FFT-DWT signal processing”,

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 42
IEEE, Transactions on Instrumentation and Measurement, Vol. 59, No.
12, pp 3184-3194. Estados Unidos. 2010.
Rivera-Guillen, J. R., et al., “Design methodology for fully dynamic-
controlled polynomial profiles and reduced tracking error in CNC machines”, Springer, The International Journal of Advanced
Manufacturing Technology, Vol. 51, No. 5-8, pp 723-737. Alemania. 2010.
Rivera-Guillen, J. R., et al., “Methodology for obtaining C3 continuity on
tool trajectory featuring acceleration and jerk constraint on computer numerical control machine”, SAGE, Proceedings of the Institution of
Mechanical Engineers, Part C, Journal of Mechanical Engineering Science, Vol. 225, pp 2206-2215. Estados Unidos. 2011.
Rodriguez-Donate, C., et al., “FPGA-based fused smart sensor for
dynamic and vibration parameter extraction in industrial robot links”, MDPI, Sensors, Vol. 10, No. 4, pp 4114-4129. Suiza. 2010.
Rodriguez-Donate, C., et al., “Wavelet-based general methodology for multiple fault detection on induction motors at the startup vibration
transient”, SAGE, Journal of Vibration and Control, Vol. 17, No. 9, pp 1299-1309. Estados Unidos. 2011a.
Rodriguez-Donate, C., et al., “Fused smart sensor network for multi-axis
forward kinematics estimation in industrial robots”, MDPI, Sensors, Vol. 11, No. 4, pp 4335-4357. Suiza. 2011b.
Romero-Troncoso, R. J., et al., “FPGA based on-line tool breakage
detection system for CNC milling machines”, Elsevier, Mechatronics, Vol. 14, No. 4, pp 439-454. Holanda. 2004.
Romero-Troncoso, R. J., et al., “FPGA-based online detection of multiple
combined faults in induction motors through information entropy and
fuzzy inference”, IEEE, Transactions on Industrial Electronics, Vol. 58, No. 11, pp 5263-5270. Estados Unidos. 2011a.
Romero-Troncoso, R. J., et al., “Real-time high-resolution frequency
estimation of electric signals in industrial applications”, NISCAIR, Journal of Scientific and Industrial Research, Vol. 70, No. 5, pp 327-331. India.
2011b.
Romero-Troncoso, R. J., et al., “Reconfigurable SoC-based smart sensor for wavelet and wavelet packet analysis”, IEEE, Transactions on
Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 43
Instrumentation and Measurement, Vol. 61, No. 9, pp 2458-2468.
Estados Unidos. 2012.
Romero-Troncoso, R. J., et al., “Early broken rotor bar detection
techniques in VSD-fed induction motors at steady-state”, IEEE, Proceedings of the 9th International Simposium on Diagnostics of
Electrical Machines, Power Electronics & Drives SDEMPED, pp 173-181. Valencia, España. 2013.
Romero-Troncoso, R. J., et al., “Broken rotor bar detection in VSD-fed
induction motors at startup by high-resolution spectral analysis”, IEEE, Proceedings of the XXI International Conference on Electrical Machines
ICEM, pp 1848-1854. Berlin, Alemania. 2014.
Saucedo-Dorantes, J. J., et al., “Reliable methodology for gearbox wear monitoring based on vibration analysis”, IEEE, Proceedings of the 40th
Annual Conference of the IEEE Industrial Electronics Society IECON, pp 3381-3385. Dallas, Estados Unidos. 2014.
Soto-Cajiga, J. A., et al., “FPGA-based architecture for real-time data reduction of ultrasound signals”, Elsevier, Ultrasonics, Vol. 52, No. 2, pp
230-237. Holanda. 2012.
Trejo-Hernandez, M., et al., “FPGA-based fused smart-sensor for tool-wear area quantitative estimation in CNC machine inserts”, MDPI,
Sensors, Vol. 10, No. 4, pp 3373-3388. Suiza. 2010.
Valtierra-Rodriguez, M., et al., “FPGA-based instantaneous estimation of unbalance/symmetrical components through the Hilbert transform”,
IEEE, Proceedings of the 39th Annual Conference of the IEEE Industrial Electronics Society IECON, pp 2277-2282. Viena, Austria. 2013a.
Valtierra-Rodriguez, M., et al., “FPGA-based neural network harmonic
estimation for continuous monitoring of the power line in industrial
applications”, Elsevier, Electric Power Systems Research, Vol. 98, pp 51-57. Holanda. 2013b.
Valtierra-Rodriguez, M., et al., “Reconfigurable instrument for neural-
network-based power-quality monitoring in 3-phase power systems”, IET, Generation, Transmission & Distribution, Vol. 7, No. 12, pp 1498-
1507. Reino Unido. 2013c.
Valtierra-Rodriguez, M., et al., “Detection and classification of single and combined power quality disturbances using neural networks”, IEEE,

Tecnología FPGA para el monitoreo y diagnóstico de fallas en maquinaria industrial ═════════════════════════════════════════════════════════════════════════════
═════════════════════════════════════════════════════════════════════════════
Especialidad: Mecatrónica 44
Transactions on Industrial Electronics, Vol. 61, No. 5, pp 2473-2482.
Estados Unidos. 2014.
AGRADECIMIENTOS.
Agradezco a todos mis colaboradores y estudiantes, con una particular mención al Dr. Roque Alfredo Osornio Ríos y al Dr. Arturo García Pérez,
con quienes conformamos el grupo de investigación HSPdigital con presencia en la Universidad de Guanajuato, la Universidad Autónoma de
Querétaro, la Universidad Autónoma de Sinaloa, en México; y las Universidades de Valladolid y Politécnica de Cataluña, en España. Un
agradecimiento personal al Dr. Gilberto Herrera Ruiz, quien me enseñó y orientó en el camino de la investigación. También agradezco al Dr. Juan
Carlos Jáuregui Correa y al Dr. Irineo Torres Pacheco por sus atinados consejos durante mi desarrollo y consolidación como investigador.
CURRÍCULUM VITAE.
El Dr. Romero Troncoso obtuvo el título de Ingeniero en Comunicaciones
y Electrónica en 1987 por parte de la Universidad de Guanajuato; el grado de Maestro en Ingeniería Eléctrica (Instrumentación y Sistemas
Digitales) por parte de la misma Universidad en 1991 y el grado de Doctor en Ingeniería por parte de la Universidad Autónoma de
Querétaro en 2004. Ha realizado estancias de investigación en la Universidad Politécnica de Cataluña, España, en 2013 y en la
Universidad de Valladolid, España, en 2014.
El Dr. Romero Troncoso recibió el premio ADIAT de innovación tecnológica 2004. Es miembro del Sistema Nacional de Investigadores
desde 2005, actualmente Nivel II. Es Senior Member del IEEE (Institute of Electrical and Electronics Engineers), Estados Unidos, desde 2012.
Desde 1987, el Dr. Romero Troncoso ingresó como profesor adscrito al Departamento de Ingeniería Electrónica de la Universidad de
Guanajuato, donde actualmente es profesor titular. Desde 2004 es profesor investigador invitado de la Facultad de Ingeniería de la
Universidad Autónoma de Querétaro.