Embed Size (px)
Citation preview

Corso di Laurea Magistrale in Ingegneria per l’Ambiente e il Territorio
A.A. 2013-2014
Telerilevamento e GISProf. Ing. Giuseppe Mussumeci
Telerilevamento: laser scanning - principi fisici, metodologie operative, interpretazioni

La tecnica del laser scanning si basa sulla misurazione delle distanze permezzo di onde elettromagnetiche (impulsi laser, in particolare), da cuil’acronimo LIDAR (Light Detection And Ranging).
LASER SCANNING
La scoperta della luce laser è attribuita ad A. Einstein che, nel 1917,ipotizzò che la stimolazione di un atomo con un raggio di luce a una certafrequenza può determinare l'emissione di un raggio di luce ad alta energia.Da questo fenomeno è derivato il termine LASER, acronimo di LightAmplification by Stimulated Emission of Radiation.
t
λ
I0-I0
I
T

Nel 1958 i fisici statunitensi Arthur Schawlow e Charles HardTownes brevettarono il primo dispositivo laser, anche se lapaternità della scoperta venne successivamente reclamata dalconnazionale Gordon Gould.
La classificazione dei dispositivi laser si basa sula natura delmateriale attivo utilizzato (sostanza che produce la radiazioneelettromagnetica) à laser a stato solido, a gas, a semiconduttore, aliquido, a elettroni liberi.
La radiazione può essere:- ultravioletta (lunghezza d'onda compresa tra i 200 e 400 nm);- visibile (tra i 400 e i 700 nm);- infrarossa (tra i 700 e i 3000 nm).

Il laser, quindi, non è altro che una radiazione elettromagnetica aventeparticolari caratteristiche:
• monocromaticità: composta da una sola frequenza di luce;• unidirezionalità (o coerenza spaziale): si propaga a grande distanzacon estrema direzionalità;• coerenza temporale: costituita da onde della stessa frequenza e in fasetra loro che si sommano l'una all'altra, originando un treno di luce che puòessere spinto ad elevata intensità e ad elevata potenza.
Più semplicemente, è possibile definire il laser come una radiazioneluminosa concentrata, monocromatica, formata da onde parallele infase tra loro
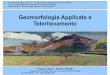
Principi di funzionamento dei laser scannerScanner distanziometrici
Lo strumento ruota intorno al proprio asse principale (verticale) effettuando la scansione orizzontale; lo specchio interno ruota ad alta frequenza intorno ad un asse ortogonale a quello principale (orizzontale) ed esegue la scansione verticale.
Emettitore/ricevitore
Specchio rotante

Lo strumento esegue tre misure per ogni impulso (θ, ϕ, D) :
- angolo azimutale,
- angolo zenitale,
- distanza inclinata θ
ϕ D

Scanner distanziometrici
misura della distanza
emettitore
ricevitore
superficie riflettente
D
tempo
tempo
misure di tempo.
misure di fase

Misurando il tempo intercorso tra l’emissione dell’impulso laser e il suo ritorno al ricevitore, la distanza D tra lo strumento e la superficie riflettente è pari a:
emettitore
ricevitore
superficie riflettente
D
impulso ricevuto
superficie riflettenteimpulso trasmesso
Tempo di volo Tv
ampi
ezza
tempo
2D
c2
TD V=

NOTA:- l’ accuratezza dipende dalla misura del tempo di volo (orologio del sensore); - la distanza massima misurabile (Dmax) dipende dall’energia dell’impulso.
Massima distanza misurabile:Risoluzione:
impulso ricevuto
superficie riflettenteimpulso trasmesso
Tempo di volo TV
ampi
ezza
tempo
2D
VT2
D ∆=∆c
maxVmax T2
D c=

La distanza può anche essere determinata misurando la differenza di fase tra l’impulso inviato e quello ricevuto.
emettitore
ricevitore
superficie riflettente
R
φ
φ
λ

D D
2D
φ
dD2 += λn
λ2λ nλ d
? ?

Per n=0
è possibile stabilire unarelazione tra la distanza dpercorso dall’onda e lafase ϕ.
πϕλ2
⋅=d
Tf 1
=fcTc =⋅=λ c ≈ 300.000 km/sec
λ
I (t)
Id
π 2ππ/2 3π/2
ϕ
D D
2D
φ
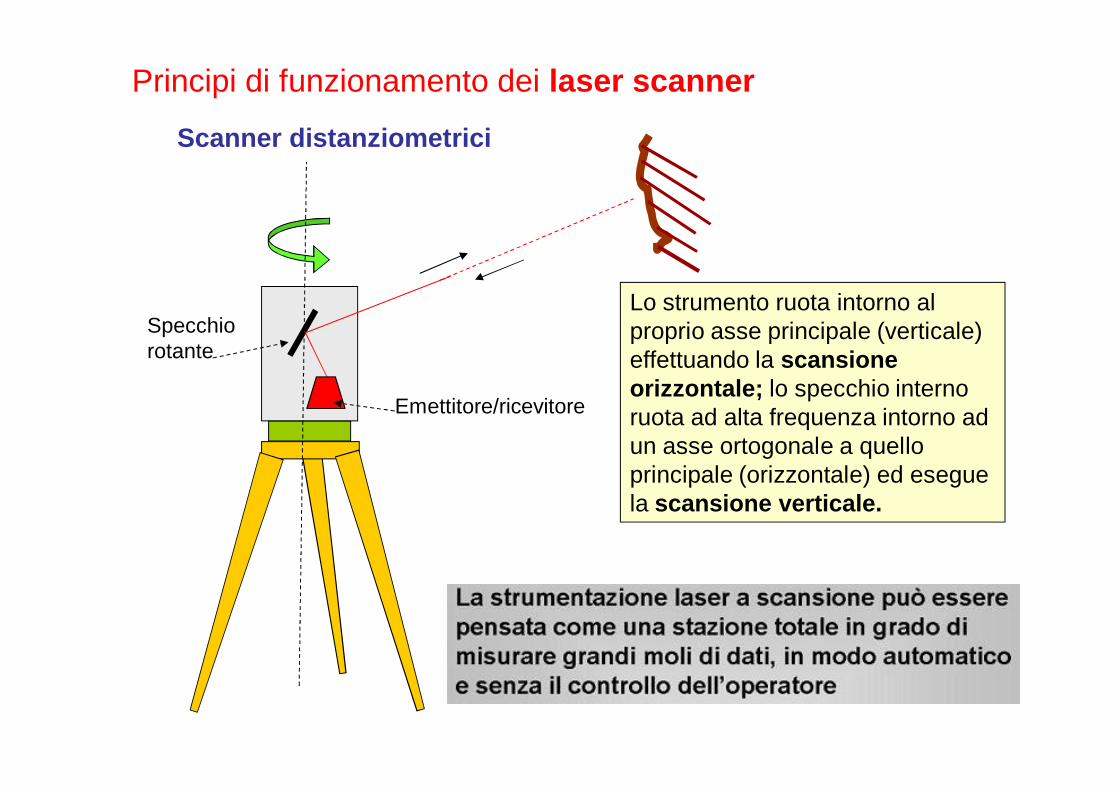
n è l’unica incognita e può essere determinata con tecniche di modulazione dell’onda
n : numero totale di cicli interiT : periodo φ : differenza di fase.
λπϕλ
2D2 ∆
+= n

Massima distanza misurabile
λπϕ
4D ∆
=
λππλ
π 42
4D max
max ==φ
2D max
maxλ
=
D D
2D
ϕ∆
λ max
dipende dalla massima lunghezza d’onda generabile.

Scanner triangolatori
La misura della distanza avviene attraverso uno schema tipico di intersezione inavanti semplice.
L’apparato è generalmente costituito da una base di lunghezza fissa, alle cui estremitàsono posti rispettivamente uno specchio piano, sul quale il trasmettitore invia gli impulsilaser, e una camera digitale che registra la radiazione riflessa dall’oggetto.
Misurando gli angoli che i raggi laser (inviato e ricevuto) formano con la base, è facilmente calcolabile la distanza del punto dallo strumento.
Superficie da rilevare
base
Specchio rotante
emettittore
camera digitalef
α
β

Scanner triangolatori
camera digitale
camera digitale
base

Nonostante gli stretti angoli solidi in cui vengono convogliati i raggi laser, questihanno comunque una divergenza à impronta al suolo (foot print) di una certadimensione, funzione dell’angolo di apertura e della distanza dellasuperficie da rilevare.
L'invio di impulsi laser con passi angolari costanti orizzontali e verticali, produce una griglia di misureregolare dalla cui densità dipende la risoluzione del rilievo.
All'interno dell’impronta "foot print", viene determinata la distanza media dalla sorgente.

I raggi laser possono incontrare ostacoli in grado di determinare riflessioniparziali del segnale (specialmente nelle zone con vegetazione fitta)
à ambiguità di interpretazione, in quanto per una singola emissionepossono aversi due o più riflessioni.
Quando si vuole determinare il DTM va acquisito l’ultimo segnale riflesso,poiché solo l’ultima riflessione proviene dal punto più vicino al terreno.
Se il rilievo è finalizzato a restituire il modello tridimensionale di una zonaurbana, va acquisito il primo impulso riflesso, scartando quelli successivi.
Nell’analisi delle biomasse, invece, sarà necessario avere tutti i dati adisposizione per una stima del volume costituito dalla copertura vegetale.

Per questo motivo i sensori laser più recenti sono corredati di analizzatore dellaforma d’onda (waveform digityzer) del segnale riflesso, che consente diindividuare le riflessioni multiple, così da avere informazioni sulla presenza diostacoli intermedi incontrati dal raggio laser.
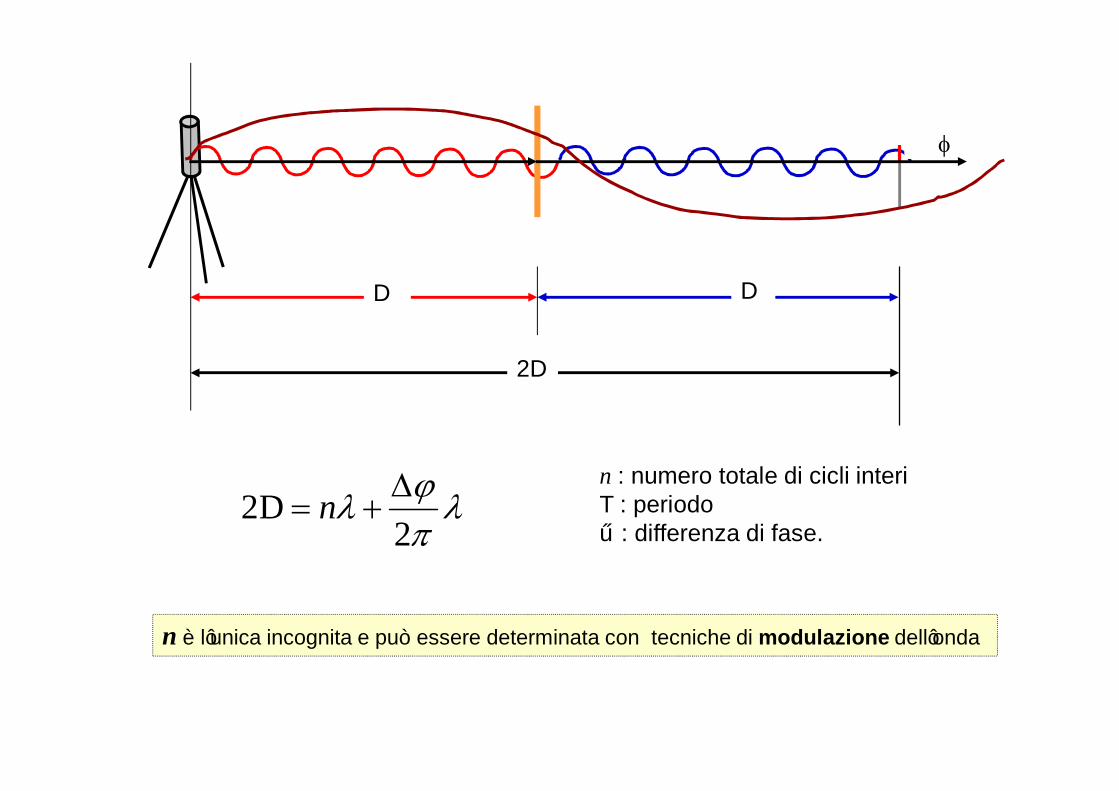
Il tempo di andata e ritorno dell’impulsodeve essere minore del periodo diemissione (T=1/f).
Aumentare l’altezza massima dei rilievi laser comporta un abbassamentodella densità di punti rilevati. In prima analisi, spingersi ad altissimefrequenze di emissione sembrerebbe eludere questo problema, ma, aduna data altezza, per rispettare la condizione di non ambiguità delsegnale, la frequenza deve restare sotto un certo limite.
In pratica, ogni impulso può essere inviatosolo dopo che tutti gli echi del precedentesegnale sono ritornati al sensore.
Condizione di non ambiguità nella ricezione del segnale
h

100%

Vantaggi della tecnologia LiDARThe other methods of topographic data collection are land surveying, GPS, inteferrometry, and photogrammetry. LiDARtechnology has some advantages in comparison to these methods, which are being listed below:
Higher accuracyVertical accuracy 5-15 cm (1s)Horizontal accuracy 30-50 cm
Fast acquisition and processingAcquisition of 1000 km2 in 12 hours.DEM generation of 1000 km2 in 24 hours.
Minimum human dependenceAs most of the processes are automatic unlike photogrammetry, GPS or land surveying.
Weather/Light independenceData collection independent of sun inclination and at night and slightly bad weather.
Canopy penetrationLiDAR pulses can reach beneath the canopy thus generating measurements of points there unlike photogrammetry.
Higher data densityUp to 167,000 pulses per second. More than 24 points per m2 can be measured.Multiple returns to collect data in 3D.
GCP independenceOnly a few GCPs are needed to keep reference receiver for the purpose of DGPS. There is not need of GCPs otherwise.This makes LiDAR ideal for mapping inaccessible and featureless areas.
Additional dataLiDAR also observes the amplitude of back scatter energy thus recording a reflectance value for each data point. This data,though poor spectrally, can be used for classification, as at the wavelength used some features may be discriminatedaccurately.
CostIs has been found by comparative studies that LiDAR data is cheaper in many applications. This is particularly consideringthe speed, accuracy and density of data.


CAM2® Laser Scanner - FARO
Caratteristiche
Distanza: 0.6 m - 120 m (Photon 120), 0.6 m - 20 m (Photon 20)
Errore di distanza lineare: ±2 mm a 25 m
Ripetibilità: @10 m: 0,4 mm rms @90 % refl.; @25 m: 0,5 mm rms @90 % refl.
Velocità di misura: fino a 976.000 punti per secondo
Colore (opzionale): fino a 39 milioni di pixel
Campo visivo: 320° x 360°
Durata minima della scansione per 3 milioni di punti: circa 30 secondi (bianco e nero)
Sensore di inclinazione: precisione 0.1°; risoluzione 0.001°; distanza ± 15°




(Fonte: http://www.riegl.com)