Embed Size (px)
Citation preview

MEMORIAS DEL XXVII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE DE 2021 PACHUCA, HIDALGO, MÉXICO
Tema A3b Mecanismos y Robótica: Mecanismos y visión por computadora
“Métodos de visión aplicados al seguimiento de puntos en mecanismos planos”
Juan Carlos Arellano-Gonzáleza,b*, Hugo Iván Medellín-Castillob, J. Jesús Cervantes-Sáncheza,
Mario Alberto García-Murilloa
aDICIS, Universidad de Guanajuato, carretera Salamanca-Valle de Santiago km 3.5+1.8, Comunidad de Palo Blanco, Salamanca, C.P. 36885, GTO.
bCIEP, Facultad de Ingeniería, Universidad Autónoma de San Luis Potosí, Av. Manuel Nava No. 8, San Luis Potosí, S.L.P., C.P. 78290, México.
*Autor contacto. Dirección de correo electrónico: [email protected]
R E S U M E N
Uno de los principales desafíos en el uso de mecanismos planos es verificar y monitorear que las trayectorias descritas por
el mecanismo correspondan con lo requerido originalmente. Sin embargo, pocos estudios se han centrado en el seguimiento
y evaluación de los puntos objetivo ubicados en los mecanismos y durante las condiciones reales de funcionamiento. En este
trabajo se presenta un estudio del uso de métodos de visión por computadora (MVC) en el seguimiento de puntos en
mecanismos planos. El objetivo es evaluar los MVC en términos de precisión, velocidad y costo. Para ello se seleccionó y
analizó un caso de estudio de un mecanismo plano de cuatro barras. Los resultados muestran que los MVC basados en la
solución homogénea y no homogénea de la matriz de calibración, representan una alternativa tecnológica para la validación
y monitoreo de las trayectorias de movimiento en mecanismos planos.
Palabras Clave: Puntos de interés, Mecanismo plano, Método de visión por computadora (MVC), Calibración de cámara, Índice de desempeño.
A B S T R A C T
One of the main challenges in the use of planar mechanisms is to verify and monitor that the trajectories described by the
mechanism correspond to what was originally required. However, few studies have focused on the tracking and evaluation
of the target points located on the mechanisms and during real operation conditions. In this paper a study about the use of
computer vision methods (CVM) for tracking target point on planar mechanisms is presented. The objective is to evaluate
the CVM, in terms of precision, speed, and cost, to track the movement of planar mechanisms. For this purpose, a case study
of a planar four-bar mechanism was selected and analyzed. The results show that CVMs based on the homogeneous and non-
homogeneous solution of the calibration matrix represent a technological alternative for the validation and monitoring of
movement trajectories in planar mechanisms.
Keywords: Target points, Planar mechanism, Computer vision method (CVM), Camera calibration, Index performance.
1. Introducción
Los mecanismos planos han sido ampliamente utilizados
para realizar tareas industriales en un plano de trabajo
[1,2] y en procesos tales como, en el manejo de
materiales, procesos de fabricación, manipuladores,
dispositivos de automóvil, entre otras. Los puntos de
interés, también conocidos como puntos objetivos o
puntos de precisión en los eslabones, describen curvas
planas paralelas a un plano de referencia. Sin embargo,
una vez que el mecanismo ha sido diseñado, fabricado y
ensamblado, es muy probable que existan errores en las
trayectorias generadas del movimiento debido a diversos
factores, tales como la flexibilidad de los eslabones,
holguras de las juntas, fricción, lubricación, desgaste y
precisión dimensional [3,4]. Por lo tanto, el seguimiento
preciso de los puntos de interés en un mecanismo plano
es necesario para verificar que el mecanismo satisfaga
eficazmente las necesidades de movimiento. Este
proceso de verificación se puede extender a lo largo de
toda la vida útil del mecanismo para detectar fallas
debido a su uso, como el desgaste excesivo en las juntas,
ruido y vibraciones.
Alok et al. [3] presentaron un estudio relacionado con
el efecto de las holguras de las articulaciones en el
desempeño cinemático de los mecanismos planos multi-
ISSN 2448-5551 DM 7 Derechos Reservados © 2021, SOMIM

MEMORIAS DEL XXVII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE DE 2021 PACHUCA, HIDALGO, MÉXICO
lazo utilizando el programa de simulación Adams®.
Vavro et al. [5] utilizaron SolidWorks® para calcular la
desviación de posición de algunos puntos objetivo en un
eslabón plano. Sin embargo, aunque las simulaciones
numéricas de mecanismos han demostrado una buena
precisión, el desempeño de un mecanismo en condiciones
de operación reales puede diferir de su simulación, dado
que pueden estar presentes varios efectos adicionales
como, errores de fabricación y ensamble, deformaciones
y desgaste.
Por otro lado, en la robótica la precisión es muy
importante porque afecta la capacidad y el desempeño de
la tarea [6,7]. Una alternativa para mejorar la precisión
de un robot es mediante una técnica de calibración
cinemática [8,9], la cual en general es un procedimiento
de cuatro pasos: modelado, medición, identificación y
compensación. Sun et al. [9] propusieron un rastreador
láser para la calibración cinemática de un manipulador
paralelo rotacional de 3 DoF; los resultados mostraron
que tres desviaciones angulares mejoraron
significativamente dentro del espacio de trabajo
prescrito. Ali et al. [10] presentaron una técnica para
medir poses de robot basada en una unidad de medida
inercial como una alternativa a los complejos procesos de
calibración de la cámara. Paijens et al. [11] presentaron
un sistema de odometría basado en sensores ópticos de
ratón de computadora, el cual se utilizó para la
calibración de robots móviles.
En cuanto a métodos de visión por computadora
(MVC), existe una gran diversidad de métodos, técnicas
y herramientas los cuales han sido aplicados en diversas
tareas tales como: seguimiento de trayectoria,
reconstrucción 3D, inspección, reconocimiento,
monitoreo, realidad aumentada, realidad virtual, etc.
[12]. Muchos de estos métodos de visión se basan en la
calibración de la cámara mediante estimaciones lineales
[12,13]. Este proceso de calibración es útil en la
estimación de los parámetros intrínsecos y extrínsecos de
las cámaras, que permiten extraer información métrica
del mundo 3D a partir de imágenes 2D. Por otro lado,
también se encuentran disponibles algunos programas de
computadora para el seguimiento de trayectorias de
puntos de interés, los cuales abarcan desde el análisis de
objetos en movimiento hasta el análisis biomecánico del
movimiento humano [14,15].
Sin embargo, existen pocos trabajos relacionados con
el seguimiento de puntos objetivo en mecanismos
mediante MVC. Tal es el caso del trabajo presentado por
García-Murillo et al. [16], en donde obtuvieron los
parámetros geométricos de un mecanismo plano de cinco
barras a partir de la reconstrucción de los lugares
geométricos mediante un método de calibración de
cámara y el método de mínimos cuadrados. Arredondo-
Soto et al. [17] utilizaron técnicas de calibración de
cámara para estimar los parámetros geométricos de un
robot paralelo, donde aseguran que el método resultó
efectivo, sin embargo, su ejecución les llevó mucho
tiempo. Por lo tanto, uno de los objetivos de este trabajo
de investigación es evaluar la aplicación de los MVC en
el seguimiento de mecanismos planos, y con la
posibilidad de extenderlo a robots paralelos.
2. Metodología
Para evaluar el desempeño de los MVC en el seguimiento
del movimiento de los mecanismos, se seleccionaron los
siguientes métodos: (i) lineal basado en la solución
homogénea de la matriz de calibración, mediante la
descomposición de valores singulares (DVS) [12,18], (ii)
lineal basado en la solución no homogénea de la matriz
de calibración [12,13], (iii) calibración de la cámara
Zhang [19,20] y (iv) un método basado en la aplicación
del programa de Kinovea [15,21,22]. Los tres primeros
MVC corresponden a, algoritmos de reconstrucción 3D y
se han utilizado en una amplia variedad de aplicaciones
como reconstrucción 3D, inspección, reconocimiento,
manejo de materiales, monitoreo, realidad aumentada,
realidad virtual, rastreo y guía de robots móviles. El
cuarto método se ha utilizado principalmente en el
estudio y medición de los movimientos de las
articulaciones humanas.
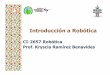
Los dos primeros MVC requieren de un patrón de
calibración de cámara de tres planos, como el mostrado
en la Figura 1a; mientras que el tercer método requiere
un patrón de calibración de un solo plano, ver Figura 1b.
(a) (b)
Figura 1 - Patrón de calibración de cámara: (a) de
tres planos, (b) de un simple plano.
2.1. Método lineal homogéneo de DVS
El método lineal homogéneo de DVS requiere del cálculo
de la matriz de calibración de la cual se extraen todos los
parámetros intrínsecos y extrínsecos. Para ello, una
cámara genera una correspondencia entre puntos
tridimensionales, Xi, y puntos en el plano de la imagen,
xi. Si hay suficientes correspondencias Xi↔xi, entonces
se puede estimar una matriz de calibración P mediante la
ec. 1.
i ix PX (1)
ISSN 2448-5551 DM 8 Derechos Reservados © 2021, SOMIM

MEMORIAS DEL XXVII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE DE 2021 PACHUCA, HIDALGO, MÉXICO
donde Xi ≡ (X, Y, Z,1)T, y xi ≡ (x, y, 1)T. El cálculo de la
matriz P se obtiene mediante un procedimiento de DVS.
2.2. Método lineal no homogéneo
Este método está definido por el siguiente sistema lineal:
11 12 13 14
21 22 23 24
31 32 33 3411
i
i
i
i
i
Xx p p p p
Yy p p p p
Zp p p p
(2)
donde ρ es un factor de escala. En este caso de estudio,
ρ=1, y pij son los componentes de la matriz P, es decir,
P=[pij]. Además, dado que se utilizará la solución no
homogénea, por lo tanto, el elemento p34 = 1. De tal
forma que, el método consiste básicamente en obtener el
resto de los parámetros de la matriz pij. Para lograr este
objetivo, es necesario utilizar seis puntos de observación
en el patrón de calibración mostrado en la Figura 1(a),
dado que cada punto de observación generará un
conjunto de dos ecuaciones.
2.3. Método de calibración de cámara Zhang
El método de calibración de cámara de Zhang consiste en
una solución de forma cerrada, seguida de un
refinamiento no lineal basado en el criterio de máxima
verosimilitud [19,20]. Este método se basa en la
observación de un patrón de un solo plano como el
mostrado en la Figura 1b, en varias posiciones y
orientaciones con una cámara. La ventaja de este método
de calibración de cámara es que permite obtener los
parámetros extrínsecos fácilmente, sin conocer la
posición de los puntos objetivo, ni la posición de la
cámara de donde se han tomado.
2.4. Método basado en el programa Kinovea
Kinovea es un programa libre y de código abierto, el cual
fue diseñado principalmente para el análisis y medición
de los movimientos articulares humanos desde un punto
de vista 2D [15,21,22]. Sin embargo, también se ha
utilizado en el seguimiento de puntos de interés en
sistemas mecánicos para determinar su posición,
velocidad y aceleración. La recopilación de datos se
puede exportar a una hoja de cálculo para el análisis del
movimiento.
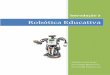
2.5. Caso de estudio
Para evaluar el seguimiento de los puntos de interés en
los mecanismos planos utilizando MVC, se seleccionó un
mecanismo plano de cuatro barras debido a su
popularidad y relativa simplicidad tanto en el diseño
como en su fabricación (ver Figura 2). Para la fabricación
del mecanismo se utilizó aluminio 6061-T6. El análisis y la evaluación de los MVC se realizó de la
siguiente manera. Primero se seleccionaron los puntos
objetivo A, B y P, tal como se muestra en la Figura 2.
Luego, se determinaron analíticamente las trayectorias de
los puntos de interés y se usaron como referencia para
comparar los resultados de los MVC. A continuación, se
implementaron los cuatro MVC descritos en la sección
anterior y se aplicaron en el seguimiento de los puntos
objetivo. Las trayectorias resultantes de los puntos
objetivo se compararon entre sí y con los resultados
analíticos. Finalmente, para identificar el MVC con el
mejor desempeño, se propuso un índice de desempeño
basado en dos criterios: (i) la precisión de los resultados,
y (ii) el tiempo total utilizado para la obtención de las
trayectorias.
Figura 2 - Mecanismo plano de cuatro barras.
2.5.1. Solución analítica
El modelo cinemático del mecanismo de cuatro barras
seleccionado se muestra en la Figura 3 y las longitudes
de los eslabones se muestran en la Tabla 1.
(a) (b)
Figura 3 - Diagrama cinemático del mecanismo de
cuatro barras: (a) vista superior, (b) vista frontal.
Tabla 1 – Dimensiones del mecanismo de cuatro barras seleccionado.
Eslabón Longitud
(mm)
Espesor
(mm)
L0 266 6
L1 62 7
L2 164 6
L3 204 7
L4 100 6
L5 100 6
De la Figura 3, se deducen los polígonos de vectores
de posición (PVP) que se muestran en la Figura 4 (a) y
(b). Por lo tanto, la ecuación característica para cada uno
de los PVP está dada por:
/ / / /A O B A C O B C r r r r (3)
/ / /P A B P B A r r r (4)
ISSN 2448-5551 DM 9 Derechos Reservados © 2021, SOMIM

MEMORIAS DEL XXVII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE DE 2021 PACHUCA, HIDALGO, MÉXICO
(a) (b) Figura 4 - Polígonos de vectores de posición: (a)
OA’B’C, (b) A’P’B.
Sustituyendo los vectores de posición implicados en
las Ecs. (3) y (4), y descomponiéndolos en sus
componentes X y Y, se obtienen las siguientes dos
ecuaciones escalares:
1 2 3 0cos cos cos 0L L L L (5)
1 2 3sin sin sin 0L L L (6)
que son las ecuaciones de restricción de posición en
términos de las variables cinemáticas θ, β y α.
Considerando el ángulo θ como movimiento de
entrada, las ecuaciones anteriores (5) y (6) se pueden
resolver para obtener las variables β y α en función de θ.
La solución para β es:
2 2 2
1 1 2 3
3 2
2arctanK K K K
K K
(7)
donde: 2
1 1 2 2 1 2 0 2 3 0
2 2 2
1 2 3 0 1
2 sin , 2 cos 2 ,
2 cos
K L L K L L L L K L
L L L L L
Y la solución para α es:
2 3
4 1 2 3
sin sin2arctan
cos cos
L L
L L L L
(8)
Finalmente, la posición de los puntos objetivo A, B y
P, se puede determinar con los siguientes vectores de
posición:
/ / ' '/ 1 1cos sinA O A A A O L e r r r i + j k (9)
/ / ' '/ / 0 3 3 1cos sinB O B B B C C O L L L e r r r r i j+ k (10)
/ / ' '/ ' '/ 1 4
1 4 2
cos cos( )
sin sin( )
P O P P P A A O L L
L L e
r r r r i
j+ k
(11)
Estos vectores de posición se grafican para una
revolución completa del eslabón de entrada 1, es decir,
para 0° < θ <360°. Los resultados se muestran en la
Figura 5. Es importante mencionar que solo se utilizó el
signo positivo de la Ec. (7).
2.6. Equipo
Para la reconstrucción 3D y el procesamiento digital
de imágenes (PDI) se utilizaron dos cámaras, dos
trípodes, un patrón de calibración de tres planos, cinco
patrones de calibración de un solo plano, marcadores
circulares planos y una lámpara de luz negra. Es
importante mencionar que todos los métodos fueron
evaluados bajo las mismas condiciones en cuanto al tipo
de cámaras, ubicación del mecanismo y número de
imágenes durante un ciclo completo de movimiento. En
el caso de los métodos homogéneo, no homogéneo y
Kinovea, se utilizó una técnica de iluminación con luz
negra para mejorar el seguimiento de los puntos objetivo.
(a)
(c)
(b)
Figura 5 - Seguimiento de los puntos objetivo A (magenta), P (rojo) y B (verde), utilizando el método analítico: (a)
vista frontal, (b) vista isométrica, (c) vista superior.
-100 -50 0 50 100 150 200 250 3000
10
20
Z (
mm
)
X (mm)
Punto A
Punto P
Punto B
Punto O
Punto C
-100 -50 0 50 100 150 200 250 300-100
-50
0
50
100
150
200
X (mm)
Y
(m
m)
Punto A
Punto P
Punto B
Punto O
Punto C
-100 -50 0 50 100 150 200 250 300 -1000
100200
0
10
20
Z (
mm
)
X (mm)
Y (mm)
Punto A
Punto P
Punto B
Punto O
Punto C
ISSN 2448-5551 DM 10 Derechos Reservados © 2021, SOMIM

MEMORIAS DEL XXVII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE DE 2021 PACHUCA, HIDALGO, MÉXICO
(a) (b) (c)
Figura 6 - Algoritmos computacionales para: (a) métodos homogéneos y no homogéneos, (b) método de Zhang, (c)
método de Kinovea.
2.7. Implementación de los MVC
Para la implementación de los MVC se desarrollaron e
implementaron los algoritmos que se muestran en la
Figura 6.
En el caso de los métodos homogéneos y no
homogéneos, se utilizaron dos cámaras y se calibraron tal
como se muestra en las Figuras 7(a) y 7(b). Ambas
cámaras se colocaron equidistantes con respecto al eje
principal del escenario. El patrón de calibración y el
mecanismo plano se ubicaron en el centro de la imagen
para evitar errores de distorsión debido a la franja
perimetral de las lentes de la cámara.
(a)
(b)
(c)
Figura 7 - Implementación de los métodos de visión
homogéneo y no homogéneo: a) disposición del
equipo, b) proceso de calibración, c) seguimiento del
mecanismo.
La captura de imágenes se realizó durante un ciclo
completo del movimiento del eslabón 1. Para ello se
dividió la revolución completa del eslabón 1 en 60 pasos,
por lo tanto, se tomaron imágenes cada 6 grados. El
movimiento se realizó manualmente utilizando un sensor
de posición angular (encoder) para asegurar la correcta
posición angular de cada paso.
Para el método Zhang, se utilizó un patrón de
calibración de un solo plano, (ver Figura 1b). La
colocación correcta del patrón de calibración en los
centros de las articulaciones, tal como se muestra en la
Figura 8, aseguró el correcto seguimiento de los puntos
objetivo. El proceso de calibración de Zhang se realizó
con la ayuda del complemento de MatLab® disponible en
[23]. De acuerdo a la literatura [19,20,23], para este
proceso de calibración se requiere de 10 a 50 imágenes
del patrón de calibración en varias posiciones (poses)
dentro del espacio de trabajo. Considerando lo anterior y
con base en experiencias preliminares, se tomaron 20
imágenes del patrón de calibración. Una vez calibrada la
cámara, se obtuvieron las imágenes correspondientes a
los puntos objetivo durante el movimiento del
mecanismo plano.
Figura 8 - Colocación de los marcadores en el
mecanismo plano para el método Zhang.
3. Resultados y discusión
Para calcular el error resultante de las trayectorias
descritas por los puntos de interés A, B y P reconstruidas
por cada MVC, se considera primero el cálculo del error
de los puntos A y B, los cuales generan un círculo y un
arco de círculo respectivamente. Por otro lado, en el
punto P se aplicó un criterio de error utilizado en la
reconstrucción 3D.
ISSN 2448-5551 DM 11 Derechos Reservados © 2021, SOMIM

MEMORIAS DEL XXVII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE DE 2021 PACHUCA, HIDALGO, MÉXICO
3.1. Puntos A y B
Los puntos A y B describen una trayectoria circular con
un radio dado por las siguientes ecuaciones:
2 2 2( ) ( ) ( )A A O A O A Or X X Y Y Z Z (12)
2 2 2( ) ( ) ( )B B C B C B Cr X X Y Y Z Z (13)
donde rA y rB son los radios de las trayectorias circulares
formadas por los puntos A y B respectivamente. Las
coordenadas XO, YO, ZO y XC, YC, ZC corresponden a los
puntos centrales de O y C. La Tabla 2 presenta los
resultados de los radios promedios (rAprom y rBprom), la
desviación estándar (DE) y el error promedio con
respecto a las dimensiones de los eslabones 1 y 3. Estos
resultados muestran que el círculo formado por el punto
B presentó el menor error promedio y la menor DE,
siendo el método no homogéneo el de mejor desempeño
en términos de precisión. Se puede observar que los
métodos homogéneos y no homogéneos tienen los
mejores resultados y son muy aproximados entre ellos,
mientras que el método de Kinovea tiene los mayores
errores promedios.
Las Figuras 9 y 10 muestran las trayectorias
reconstruidas tridimensionalmente de los puntos A y B
para cada MVC. Se observa que los resultados de los
métodos homogéneos y no homogéneos son muy
similares a los resultados analíticos. Sin embargo, en el
caso del método de Zhang los radios del círculo formado
por los puntos A y B son ligeramente mayores que los
resultados de los MVC homogéneo y no homogéneo, y al
método analítico. Por otro lado, las Figuras 9 y 10
muestran que para el método Zhang, varias posiciones de
los puntos A y B se encuentran por encima del eje ZZ' con
respecto a las curvas obtenidas por el método analítico.
Además, las curvas muestran una irregularidad con
respecto a este eje ZZ', y sugiere que el mecanismo se
desplazaba axialmente y en algunas zonas de forma
abrupta, lo cual es poco probable. Por otro lado, el
programa de Kinovea tuvo el peor desempeño en
términos de precisión. Además, la trayectoria del punto B
presenta una menor amplitud de movimiento y un ligero
desplazamiento hacia la derecha, tal como se observa en
la Figura 10(a).
Tabla 2 – Resultados de los radios descritos por las trayectorias de los puntos A y B.
A B
Método rAmean
(mm)
DE
(mm)
Error
prom.
(%)
rBmean
(mm)
DE
(mm)
Error
prom.
(%)
Homogéneo 62.90 1.082 1.45 204.85 0.847 0.42
No homogéneo 62.85 1.092 1.37 204.67 0.835 0.33
Zhang 63.24 1.402 2.00 205.83 0.914 0.90
Kinovea 65.51 2.442 5.66 200.67 1.897 1.63
3.2. Punto P
Para el punto P, siendo el punto de interés más
importante, dado que aquí generalmente se coloca la
herramienta que realizará la tarea, el error promedio de la
trayectoria se calculó mediante el siguiente criterio
utilizado en la reconstrucción 3D:
2 2 2
3
1
ˆ ˆ ˆ /N
D i i i i i i
i
Err X X Y Y Z Z N
(14)
donde 𝑋𝑖 , 𝑌𝑖 , 𝑍𝑖 son las coordenadas 3D calculadas por el
método analítico, �̂�𝑖 , �̂�𝑖 , �̂�𝑖 son las coordenadas 3D
calculadas por los MVC y N es el número de posiciones
involucradas en el análisis. La Tabla 3 presenta los
resultados del error medio del punto P, así como la DE.
La Figura 11 muestra las trayectorias reconstruidas
tridimensionalmente del punto P para cada MCV y el
método analítico. Estos resultados muestran nuevamente
que los métodos homogéneos y no homogéneos
resultaron con el menor error promedio, siendo el método
homogéneo el que presentó el menor error. Por otro lado,
el método Zhang tuvo un desempeño superior al de
Kinovea; sin embargo, nuevamente se manifiesta el
mismo comportamiento en cuanto a que algunos de los
puntos reconstruidos resultaron ligeramente más altos en
el eje ZZ' comparados con los resultados de los métodos
homogéneos, no homogéneos y el analítico, tal como se
muestra en la Figura 11(b) y 11(c).
Tabla 3 – Resultados del error medio 3D para la
trayectoria del punto P.
P
Método
Error
3D
prom.
(mm)
DE
(mm)
Homogéneo (SVD) 1.78 0.728
No-Homogéneo 1.83 0.736
Zhang 3.93 0.897
Kinovea 13.41 0.817
ISSN 2448-5551 DM 12 Derechos Reservados © 2021, SOMIM

MEMORIAS DEL XXVII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE DE 2021 PACHUCA, HIDALGO, MÉXICO
(a)
(b)
(c)
Figura 9 - Seguimiento del punto objetivo A: (a) vista superior, (b) vista frontal, (c) vista isométrica.
(a)
(b)
(c)
Figura 10 - Seguimiento del punto objetivo B: (a) vista superior, (b) vista frontal, (c) vista isométrica.
-80 -60 -40 -20 0 20 40 60 80-80
-60
-40
-20
0
20
40
60
80
100
X (mm)
Y (
mm
)
Analítico
Homogéneo
No-homogéneo
Zhang
Kinovea
-80 -60 -40 -20 0 20 40 60 800
10
20
X (mm)
Z (
mm
)
Analítico
Homogéneo
No-homogéneo
Zhang
Kinovea
-100 -50 0 50 100-50
050
100
0
10
20
Y (mm)
X (mm)
Z (
mm
)
Analítico
Homogéneo
No-homogéneo
Zhang
Kinovea
60 80 100 120 140 16060
80
100
120
140
160
180
X (mm)
Y (
mm
)
Analítico
Homogéneo
No-homogéneo
Zhang
Kinovea
60 80 100 120 140 1600
10
20
X (mm)
Z (
mm
)
Analítico
Homogéneo
No-homogéneo
Zhang
Kinovea
60 80 100 120 140 160 0
100
200
0
10
20
Y (mm)X (mm)
Z (
mm
)
Analítico
Homogéneo
No-homogéneo
Zhang
Kinovea
ISSN 2448-5551 DM 13 Derechos Reservados © 2021, SOMIM

MEMORIAS DEL XXVII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE DE 2021 PACHUCA, HIDALGO, MÉXICO
(a)
(b)
(c)
Figura 11 - Seguimiento del punto objetivo P: (a) vista superior, (b) vista frontal, (c) vista isométrica.
3.3. Indicador de desempeño
Para identificar el método con mejor desempeño, se
propuso un índice de desempeño de la siguiente manera:
_ind desemp precisión tiempop c c (15)
donde cprecisión es el criterio de precisión con respecto a
los resultados del método analítico, y ctiempo corresponde
al criterio relacionado con el tiempo total requerido por
por los MVC para la obtención de las trayectorias de los
tres puntos objetivo. El valor de cprecisión se obtuvo a partir
Tabla 4 – Criterio de precisión para cada MVC.
cprecisión
Método A B C cprecisión
prom.
Homogéneo (SVD) 0.94 0.79 1.00 0.91
No homogéneo 1.00 1.00 0.97 0.99
Zhang 0.69 0.37 0.45 0.50
Kinovea 0.24 0.20 0.13 0.19
Tabla 5 – Tiempo requerido para cada uno de los MVC y el ctiempo.
Método
Tiempo de
preparación
(s)
Tiempo de
calibración
(s)
Tiempo para
el PDI y
reconstrucción
2D/3D (s)
Tiempo
total
(s)
ctiempo
Homogéneo (SVD) 1538 943 1805 4286 0.89
No homogéneo 1603 964 1890 4457 0.86
Zhang 1727 1357 2297 5381 0.71
Kinovea 1612 689 1530 3831 1.00
-40 -20 0 20 40 6020
40
60
80
100
120
140
160
X (mm)
Y
(m
m)
Analítico
Homogéneo
No-homogéneo
Zhang
Kinovea
-40 -20 0 20 40 600
10
20
X (mm)
Z
(m
m)
Analítico
Homogéneo
No-homogéneo
Zhang
Kinovea
-40 -20 0 20 40 600
100
200
0
10
20
Y (mm)
X (mm)
Z
(m
m)
Analítico
Homogéneo
No-Homogéneo
Zhang
Kinovea
ISSN 2448-5551 DM 14 Derechos Reservados © 2021, SOMIM

MEMORIAS DEL XXVII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE DE 2021 PACHUCA, HIDALGO, MÉXICO
de los porcentajes de error medio de las Tablas 2 y 3 y
mediante un proceso de normalización, asignando un
valor de 1 al método que presentó el mejor desempeño.
La Tabla 4 muestra los valores de cprecisión para cada punto
y método. Cabe mencionar que, aun cuando se tuvo el
cuidado necesario durante la fabricación y medición de
los componentes del mecanismo, parte de las variaciones
observadas en las trayectorias de los puntos objetivo
podrían atribuirse a errores en la fabricación y ensamble
del mecanismo plano.
Para el criterio relacionado con el tiempo total
requerido para cada uno de los métodos de visión, se
midió el tiempo mediante un cronómetro para cada uno
de los procesos involucrados. La Tabla 5 muestra el
tiempo total requerido por cada método. El valor del
criterio de tiempo (ctiempo) se calculó de manera similar al
criterio anterior y se le dio un valor de 1 al método más
rápido.
La Tabla 6 muestra los resultados del índice de
desempeño calculado por la ec. 15. Estos resultados
muestran que los MVC homogéneos y no homogéneos
tuvieron el mejor índice de desempeño. Por otro lado, el
método de Kinovea mostró el peor desempeño a pesar de
ser el método más rápido y de requerir solo una cámara.
Además, el método de Kinovea solo proporciona
información en 2D, lo que representa una desventaja en
comparación con los otros métodos de visión
tridimensionales. Por otro lado, el método de Zhang
ocupó el tercer lugar porque mostró un comportamiento
erróneo en el eje ZZ' en comparación con el método
analítico, además de que fue método más lento de todos.
Por lo tanto, los resultados sugieren que los CVM
homogéneos y no homogéneos representan una
alternativa tecnológica para verificar el estado funcional
de un mecanismo plano. Esto significa que a través de
estos dos métodos es posible validar el correcto diseño y
fabricación de los mecanismos planos, así como
monitorear el correcto desempeño durante su vida útil.
Adicionalmente, estos dos métodos pueden representar
una alternativa para la medición del grado de desajuste
de un robot, con el fin de compensar la calibración del
mismo.
Tabla 6 – Índice de desempeño.
Método Índice de
desempeño
Homogéneo 1.80
No homogéneo 1.85
Zhang 1.21
Kinovea 1.19
4. Conclusión
En este trabajo se ha presentado una investigación para la
evaluación del desempeño de algunos MVC para el
seguimiento de puntos de interés en mecanismos planos.
Los resultados han demostrado que los MVC
homogéneos y no homogéneos presentaron el mejor
desempeño en términos de precisión, tiempo de
implementación y equipo requerido. Estos dos MVC se
pueden aplicar en el seguimiento de trayectorias de
trabajo en mecanismos planos para garantizar su correcta
funcionalidad. Por otro lado, la metodología propuesta
para la aplicación de estos dos MVC puede ser aplicada
de forma sencilla y a bajo costo para el seguimiento tanto
de mecanismos planos como robots paralelos. Aun
cuando el estudio se centró en un mecanismo plano, el
enfoque y los métodos de visión presentados podrían
usarse para evaluar mecanismos espaciales. Como
trabajo futuro se evaluarán los MVC en el seguimiento
del movimiento de los puntos objetivo de mecanismos
espaciales.
Agradecimientos
El primer autor agradece al Programa de Desarrollo
Profesional de los Académicos (PRODEP) de la
Secretaría de Educación Pública (SEP) de México, por la
beca otorgada durante sus estudios de doctorado.
REFERENCIAS
[1] D.A. Brake, J.D. Hauenstein, A.P. Murray, et al. The
complete solution of Alt-Burmester synthesis
problems for four-bar linkages. ASME Journal of
Mechanisms and Robotics, vol. 8, no. 4, pp. 1–8,
2016.
[2] J. Glabe and J.M. McCarthy. Five position synthesis
of a planar four-bar linkage. Advances in Mechanism
and Machine Science, vol. 73, pp. 599–605, 2019.
[3] S. Alok, K. Chaudhary and A. Guha. A study on
critical order of joints with clearances and its effect
on kinematic performance of multiloop planar
mechanisms. Sådhanå, vol. 45, no. 126, pp. 1–12,
2020.
[4] T. Sun, Y.M. Song, Y.G. Li, et al. Separation of
comprehensive geometrical errors of a 3-DoF parallel
manipulator based on Jacobian matrix and its
sensitivity analysis with Monte-Carlo method. Chin J
Mech Eng., vol. 24, no. 3, pp. 406–413, 2011.
[5] J. Vavro, J.J. Vavro, P. Kováčiková, et al. Kinematic
and dynamic analysis of planar mechanisms by means
of the SolidWorks software. Procedia Engineering,
vol. 177, pp. 476–481, 2017.
[6] J.P. Merlet. Parallel robots. Netherlands: Springer
(2006).
ISSN 2448-5551 DM 15 Derechos Reservados © 2021, SOMIM

MEMORIAS DEL XXVII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE DE 2021 PACHUCA, HIDALGO, MÉXICO
[7] D. Zhang. Parallel robotic machine tools. New York:
Springer (2010).
[8] C. Li, Y.Q. Wu, H. Löwe et al. POE-based robot
kinematic calibration using axis configuration space
and the adjoint error model. IEEE Trans Rob., vol. 32,
no. 5, pp. 1264–1279, 2016.
[9] T. Sun, B.B. Lian, J.T. Zhang, et al. Kinematic
calibration of a 2-DoF over-constrained parallel
mechanism using real inverse kinematics. IEEE
Access, vol. 6: pp. 67752–67761, 2018.
[10] M. Ali, M. Simic, F. Imad. Calibration method for
articulated industrial robots. Procedia Computer
Science, vol. 112, pp. 1601–1610, 2017.
[11] A.F.M. Paijens, L. Huang, A.M. Al-Jumaily.
Implementation and calibration of an odometry
system for mobile robots, based on optical computer
mouse sensors. Sensors and Actuators, vol. 301, pp.
1–10, 2020.
[12] R. Hartley, A. Zisserman. Multiple View Geometry in
computer vision. (3rd ed.). United Kingdom:
Cambridge University press (2004).
[13] J. Sun, P. Wang, Z. Qin, and H. Qiao. Overview of
camera calibration for computer vision. Proceeding of
the 11th World Congress on Intelligent Control and
Automation, pp. 86–92, 2014.
[14] Tracker, video analysis and modeling tool. [En línea].
Disponible: https://physlets.org/tracker/, [Último
acceso: 20 6 2021].
[15] M.E. Littrell, Y.H. Chang, and B.P. Selgrade.
Development and Assessment of a Low-Cost Clinical
Gait Analysis System. Journal of Applied
Biomechanics, vol. 34, no. 6, pp. 503–508, 2018.
[16] M.A. García-Murillo, S.M. Espinosa, J.F. Reveles-
Arredondo, et al. Identificación de parámetros
geométricos de un mecanismo de 5 barras por medio
de un método de calibración de cámaras. SOMIM, pp.
107-114, 2018.
[17] M. Arredondo-Soto, M.A. García-Murillo, J.J.
Cervantes-Sánchez, et al. Identification of geometric
parameters of a parallel robot by using a camera
calibration technique. Journal of Mechanical Science
and Technology, vol. 35, no. 2, pp. 729–737, 2021.
[18] Nassir Navab, SVD abstract en la documentación 3D
Computer Vision Script Draft. Technische Univertität
München, pp. 48–51, 2006.
[19] Z. Zhang. A Flexible New Technique for Camera
Calibration. Technical Report Microsoft Research,
One Microsoft Way, Redmond, WA 98052-6399,
USA, 2008.
[20] Z. Zhang. Camera calibration with one-dimensional
objects. IEEE Transactions on Pattern Analysis and
Machine Intelligence, vol. 26, no. 7, pp. 892–899,
2004.
[21] C. Damsted, RO Nielsen, and LH Larsen. Reliability
of Video‐Based Quantification of the Knee‐and Hip
Angle at Foot Strike During Running. International
Journal of Sports Physical Therapy, vol. 10, no. 2, pp.
147–154, 2015.
[22] Kinovea, video player for sport analysis. [En línea].
Disponible: https://www.kinovea.org/, [Último
acceso: 20 6 2021].
[23] J. Bouguet. Camera Calibration ToolBox for MatLab.
[En línea]. Disponible:
http://www.vision.caltech.edu/bouguetj/calib_doc/in
dex.html, [Último acceso: 20 6 2021].
ISSN 2448-5551 DM 16 Derechos Reservados © 2021, SOMIM



















![[ Robótica ]](https://img.pdfslide.tips/doc/110x75/55cf413ebb61eb4e118b46fa/-robotica-.jpg)