Embed Size (px)
Citation preview

การประชมวชาการเครอขายวศวกรรมเครองกลแหงประเทศไทย ครงท 27 16-18 ตลาคม 2556 พทยา จงหวดชลบร
DRC-2021
การปรบต าแหนงอางองเพอลดการสนสะเทอนตกคางของตวแบบปนจนชนดมขาหยง
ชกรอกบรรทกน าหนกไมแนนอน Reference Position Shaping to Reduce Residual Vibration of Gantry Crane Model
Carrying Uncertain Payload
ภวดล โพธแดง1,2*, สจจา ตะเวทพงศ1 และ วทต ฉตรรตนกลชย1
1 หองปฏบตการควบคมหนยนตและการสนสะเทอน (CRV Lab) ภาควชาวศวกรรมเครองกล คณะวศกรรมศาสตร มหาวทยาลยเกษตรศาสตร
จตจกร กรงเทพฯ 10900 2 ภาควชาวศวกรรมเครองกล คณะวศกรรมศาสตร มหาวทยาลยธนบร หนองแขม กรงเทพฯ 10160
*ตดตอ: [email protected], เบอรโทรศพท 09 0648 9995
บทคดยอ ป นจนชนดมขาหยงชกรอก (gantry crane) โดยทวไปประกอบดวย สวนขบเคลอน สายเคเบล รอก และ
สวนบรรทกน าหนก ปญหาส าคญทพบส าหรบการออกแบบระบบควบคมป นจนชนดมขาหยงชกรอก คอ การแกวงของการบรรทกน าหนก อนเนองมาจากการเคลอนทของสวนขบเคลอน และ การบรรทกน าหนกทมความไมแนนอน ดวยเหตนทางผวจยจงน าเทคนคอนพตเชปปง (Input shaping) มาชวยลดการสนสะเทอนทเกดขน หลกการท างานของเทคนคอนพตเชปปง คอ ปรบต าแหนงสญญาณอางองใหม โดยน าสญญาณอางองเดมมาประสาน (convolute) กบอนกรมของแรงดลในเวลาทเหมาะสม ท าใหเกดการหกลางของการสนสะเทอนทเหลอจากการเคลอนท ซงอนกรมของแรงดลและเวลาทใสแรงดลถกออกแบบมาจากคาความถธรรมชาตและอตราสวนความหนวงของระบบ สวนของการบรรทกน าหนกไมแนนอน สงผลโดยตรงกบความแมนย าของคาความถธรรมชาต และอตราสวนความหนวงของระบบ แตผลกระทบในสวนนสามารถแกไขไดโดยเพมความทนทานในดานความคลาดเคลอนของคาความถธรรมชาตและอตราสวนความหนวง งานวจยนไดท าการทดลองเปรยบเทยบประสทธภาพของเทคนคอนพตเชปปง 3 ชนด คอ Unshaped ZVD และ ZVDD ตวแบบป นจนชนดมขาหยงชกรอกทใชในงานวจยนมลกษณะเปนแขนลกตมนาฬกา ตดตงกบระบบขบเคลอนแบบบอลสกร และบรเวณปลายแขนลกตมนาฬกามกลองส าหรบใสเหรยญเพอเพมน าหนกไมแนนอนใหระบบ จดประสงคของงานวจยคอใหแขนลกตนนาฬกาเคลอนทตามสญญาณแบบ Square wave และเกดการสนสะเทอนนอยทสด ท าการเปรยบเทยบการทดลอง 2 แบบ คอการท างานในสภาวะไมบรรทกน าหนกไมแนนอน และ ท างานในสภาวะบรรทกน าหนกไมแนนอน ผลการทดลองแสดงใหเหนวา Input shaper แบบ ZVDD มประสทธภาพในการลดการสนสะเทอนดทสดในทงสองกรณ ค ำหลก: การลดการสนสะเทอน, อนพตเชปปง, ป นจนชนดมขาหยงชกรอก Abstract A gantry crane consists of drive train, cable, reel and carrying payload. A main problem, found in control system design for the gantry crane, is oscillation of carrying payload due to movement of the driven train and uncertain payload. Due to this reason, we propose using input shaping technique to reduce the residual vibration. Principle of the input shaping technique is to adjust reference position by

การประชมวชาการเครอขายวศวกรรมเครองกลแหงประเทศไทย ครงท 27 16-18 ตลาคม 2556 พทยา จงหวดชลบร
DRC-2021
convoluting between the reference position and a properly designed impulse sequence, causing the cancellation of residual vibration. The impulse sequence and its time interval are designed from natural frequency and damping ratio of the system. Carrying uncertain payload directly affects the accuracy of the natural frequency and damping ratio of the system. However, this effect can be improved by increasing robustness against uncertainty of the natural frequency and damping ratio. This work compares experimentally the performance of three input shaping techniques namely unshaped, ZVD input shaper and ZVDD input shaper. The gantry crane model in this work consists of a pendulum, a cart and a mono-carrier. At the tip of the pendulum, there is a coin carrying box, representing uncertain payload of the system. The objective is to make the payload track a square wave signal with minimum residual vibration. We compare the oscillation of two cases: when the pendulum has no payload and when the pendulum carries uncertain payload. Experimental results show that the ZVDD input shaper is the more effective in residual vibration reduction in both cases than the unshaped and ZVD input shaper. Keywords: Vibration reduction, Input shaping, gantry crane.
1. บทน า ป นจนชนดมขาหยงชกรอก (Gantry crane) เปน
อปกรณส าคญทอ านวยความสะดวกในดานการขนถายวสด มหลายขนาดตามลกษณะการใชงาน เมอพจารณาการท างานของป นจนชนดมขาหยงชกรอก พบวาตวป นจนจะเกดการแกวงของตวสายเคเบล (Cable) ซงการแกวงของสายเคเบล อาจสงผลใหเกดอบตเหตระหวางการปฏบตงาน
การแกปญหาดงกลาวสวนใหญเปนการน าทฤษฏการออกแบบระบบควบคมทซบซอนมาใชงาน ทงในสวนของการใชวธการแบบปรภมสเตจ เชน การออกแบบระบบควบคมแบบเชงเสน [1] หรอการน าตวควบคมทเหมาะสมทสด [2] มาเสรมการท างานเพอลดการแกวงของป นจนชนดมขาหยงชกรอก นอกจากนยงมการน าทฤษฏการออกแบบตวควบคมแบบไมเชงเสนมาชวยเพมประสทธภาพการท างานของระบบ [3,4] แตเปนททราบกนดวาทฤษฏการออกแบบทงหมดทกลาวมาจ าเปนตองใชแบบจ าลองทแมนย า [5] สงผลใหข นตอนการออกแบบระบบควบคมดงกลาวมความซบซอนมากยงขน และในกรณทป นจนมการบรรทกสมภาระ คาพารามเตอรของระบบมการเปลยนแปลง ถาตวควบคมมควาทนทานไมพอ อาจท าใหระบบเกดการท างานผดพลาดได
ดวยเหตนผวจยจงสนใจเทคนคอนพตเชปปง (Input shaping) เนองจากเทคนคนสามารถจดการกบการสนสะเทอนทหลงเหลอในระบบไดด และการทเทคนคดงกลาวมลกษณะเปน Feed forward control เทคนคอนพตเชปปงจงเหมาะกบการปรบปรงประสทธภาพการท างานของป นจนชนดมขาหยงชกรอก เน องจากตวเทคนคท างานภายนอกลปการควบคม จงสามารถน าเทคนคนไปท างานรวมกบตวควบคมเดมของระบบไดทนท โดยไมตองตดตงอปกรณเพมเตม ดงนนจงสามารถลดคาใชจายลงไดอยางมาก
เทคนคอนพตเชปปงเปนเทคนคทคอนขางใหม และพบเหนไดนอยในวารสารวชาการทงระดบชาต และนานาชาต เทคนคนถกคดคนโดย Singer และ Seering ในป ค.ศ.1990 [6] คาพารามเตอรส าคญทใชส าหรบการค านวณคอ คาความถธรรมชาต ( n ) และคาอตราสวนความหนวง( ) [7] จดเดนอกประการของเทคนคอนพตเชปปงคอ สามารถเพมความทนทาน (Robustness) ตอการเปลยนแปลงคาความถธรรมชาต และอตราสวนความหนวงของระบบ สงผลใหเทคนคนสามารถลดการสนสะเทอนไดทงสภาวะการท างานปกต และสภาวะการบรรทกน าหนก

การประชมวชาการเครอขายวศวกรรมเครองกลแหงประเทศไทย ครงท 27 16-18 ตลาคม 2556 พทยา จงหวดชลบร
DRC-2021
สวนทสองของงานวจยกลาวถงพนฐานของเทคนคอนพตเชปปง สวนทสามกลาวถงลกษณะของตวแบบป นจนชนดมขาหยงชกรอก และการหาคาความถธรรมชาต และอตราสวนความหนวงส าหรบการค านวนเทคนคอนพตเชปปง สวนทสแสดงการจดเตรยมอปกรณการทดลอง สวนทหาแสดงผลการทดลอง และสวนสดทายเปนสรปผลการทดลอง
2. พนฐานเทคนคอนพตเชปปง
สวนนกลาวถงพนฐานของเทคนคอนพตเชปปง เมอพจารณาผลตอบสนองของแรงดลตอระบบเชงเสนทเปนระบบความหนวงต า มองศาอสระเปนหนง และ ไมมแรงภายนอกมากระท า ผลตอบสนองดงกลาวสามารถแสดงไดดงรปท 1(a) จากรปพบวาแรงดล
1A และ
2A สรางผลตอบสนองเปนรปคลนไซนทแอมปพลจดลดลงแบบเลขชก าลง จนสดทายคาแอมพลจดวงเขาสศนย จากรปถาแรงดล
2A มขนาดทเหมาะสมและคอนโวลชนในเวลาทถกตอง การสนสะเทอนจะถกหกลางกนสามารถแสดงไดดงรปท 1(b)
( )y t
( )y t
t
t
1A
2A
1A
2A(a)
(b)
1t 2t
1t 2t
รปท 1 แสดงผลตอบสนองของระบบกบแรงดล
Input shaper
G Pr +
-e u y
รปท 2 แสดงระบบควบคมแบบปอนกลบกบเทคนค
อนพตเชปปง
ดงทกลาวมาเบองตนเทคนคอนพตเชปปงเปนเทคนคแบบ Feed forward control สามารถแสดงไดดงรปท 2 เมอ G คอตวควบคม, P คอ ระบบ, r คอสญญาณอางอง, y คอสญญาณขาออกของระบบ, e คอคาความผดพลาด และ u คอ สญญาณควบคม
หลกการท างานของเทคนคอนพตเชปปงคอปรบเปลยนสญญาณอางองใหมโดยท าการคอนโวลชน (Convolution) ระหวางแรงดลกบเวลาทเหมาะสม ผลทไดคอ Shaped command โดย Input shaper แบบพ น ฐ านท ไ ม ม ก า ร เพ ม ค ว ามทนทานต อ ก า รเปลยนแปลงคาความถธรรมชาต และอตราสวนความหนวง เรยกไดวา Input shaper แบบ ZV (Zero vibration) สามารถแสดงไดดงรปท 1(b) คาตวแปร
1A ,2A ,
1t และ 2t สามารถหาไดจาก (1) เมอ คอคาอตราสวนความหนวง, n คอคาความถธรรมชาตของระบบ สวนคา
1t ก าหนดใหเปน 0 วนาท เพอลดเวลาหนวง (Delay) ของระบบ
21
1 1
2 2 2
10
1
11 n
A t K eK
K tA t tK
(1)
การเพมความทนทานใหกบตวเทคนคอนพตเช
ปปงสามารถท าไดโดยการหาอนพนธยอยเทยบกบคาความถธรรมชาตและอตราสวนความหนวง สงทไดมาคอจ านวนแรงดลม 3 แรงดล สามารถเรยกอนพตเชปปงชนดนวา Input shaper แบบ ZVD (Zero vibration derivative) ซงคาความทนทานตอการเปลยนคาความถธรรมชาตอยท ±15% [8] ถาระบบมการเปลยนแปลงสง สามารถเพมขดจ ากดไดโดยการหาอนพนธเทยบกบคาความถธรรมชาต จะได Input shaping แบบ ZVDD คาความทนทานทไดจะเพมมาเปน ± 25% ตอการเปลยนแปลงของคาความถธรรมชาต

การประชมวชาการเครอขายวศวกรรมเครองกลแหงประเทศไทย ครงท 27 16-18 ตลาคม 2556 พทยา จงหวดชลบร
DRC-2021
3 การหาคาความถธรรมชาต และอตราสวนความหนวง ของแบบจ าลองปนจนแบบขาหยงชนดชกกรอก
ลกษณะแบบจ าลองของป นจนชนดมขาหยงชกรอกทใชในงานวจยนเปนแขนลกตมนาฬกายดตดกบรถลาก (Cart) ตวขบเคลอนแบบ Mono-carrier ดงนนความแตกตางทชดเจนระหวางตวแบบและป นจนชนดมขาหยงชกรอกของจรงคอ สายเคเบลเปนแบบแขงเกรง และระยะยดของสายเคเบลมขนาดคงท สามารถแสดงไดอะแกรมไดตามรปท 3
xF
m
, ,lJ m l
,p pJ m
c lc
รปท 3 แสดงไดอะแกรมของแบบจ าลองป นจนแบบขา
หยงชนดชกรอก จากรปท 3 ระบบดงกลาวเปนระบบทเปน Under
actuate มอนพตเปนเปนแรงทเกดจากมอเตอร สวนเอาพตของระบบเปนระยะทางของรถลาก ( x ) และองศาการแกวงของแขนลกตมนาฬกา ( ) เมอพจารณาการท างานของระบบพบวาการแกวงของแขนลกตมนาฬกาเกดจากการเคลอนทของรถลาก การหาสมการการเคลอนทสามารถหาไดโดยวธ Lagrange’s method ดงน
1
( ) ( )2
( ) ( )2 2
2
l P
l P
P l P
lmx m x m x l F cx
l lm x m l x l
lJ J m g m gl c
(2)
เมอ J คอโมเมนตความเฉอยของแขนลกตมนาฬการอบจดหมน o, m คอมวลของรถลาก, lm คอมวลของแขนลกตมนาฬกา, PJ คอโมเมนตความเฉอยของมวลบรรทกไมแนนอน, Pm คอมวลบรรทก
ไมแนนอน และ 1,c c คอ Viscous damping ของรถ
ลาก และขอตอของแขนลกตมนาฬกากบตวรถลาก และ l คอความยาวของแขนลกตมนาฬกา สามารถเขยนเปนสมการเชงเสนโดยท าการประมาณคารอบจดสมดลสามารถเขยนไดตาม (2) ก าหนดใหจดศนยกลางมวลมการเคลอนทในแนวระดบ จากนนท าการจดรป (2) และท าการแปลงลาปลาซเพอหาความสมพนธในรปฟงกชนถายโอน สามารถเขยนไดตาม (3)
2
2 2 2 2
1
22
( )
( ) ( )( )
,2
4
g2
l P l P
l P P
l P
s Bs
F s As cs Cs c s D Bs Bs
lA m m m B m m l
lC m m l J J
lD m l m gl
(3)
การหาเอกลกษณของระบบ เนนเฉพาะการหาคาความถธรรมชาต และอตราสวนความหนวงของแขนลกตมนาฬกา เน องจากอปกรณดงกลาวเปนสาเหตหลกของการสนสะเทอนในระบบ ตอมาท าการออกแบบตวควบคมของรถลากโดยใชตวควบคมแบบพไอด ก าหนดใหรถลากเคลอนทตามสญญาณแบบขนบนได โดยเคลอนทจาก 0 cm ไปยง 5 cm แสดงไดตามรป 4(a) และสญญาณเอาพตทไดคอองศาการแกวงของแขนลกตมนาฬกาตามรป 4(b) ซงรปภาพทงหมดไดจากการทดลองจรง
(a)
(b) รปท 4 แสดงสญญาณอนพตและเอาพตของระบบ
การหาคาพารามเตอรของระบบทางผวจยใช Identification toolbox ซงเปนเครองมอเสรมในโปรแกรม Matlab จากการท าการทดลองทงหมด 32

การประชมวชาการเครอขายวศวกรรมเครองกลแหงประเทศไทย ครงท 27 16-18 ตลาคม 2556 พทยา จงหวดชลบร
DRC-2021 ครงพบวา คาความแมนย าของแบบจ าลองทสรางอยในชวง 88.6- 92.21 % โดยหาไดจากคาความผดพลาดก าลงสองเฉลย สามารถแสดงการเปรยบผลจากการวดจรง และการจ าลองไดตามรปท 5 จากการหาเอกลกษณของระบบ พบวาคาความถธรรมชาตทไดอยในชวง [6.702 6.941] rad/s และ คาอตราสวนค ว า ม ห น ว ง ข อ ง ร ะ บ บ อ ย ใ น ช ว ง [ 3 33.25 10 3.35 10 ]
เพอเปนการยนยนวาคาความถธรรมชาตทหามาไดจากกระบวนการหาเอกลกษณของระบบ มความใกลเคยงกบความถธรรมชาตจรง จงน าสญญาณความเรงทเกบคามาท าการ Fast Fourier Transform (FFT) แสดงไดดงรปท 6 จากรปพบวาชวงทมชวงกวางมากทสดคอชวงทเปนความถธธรรมชาต เกดขนทยานความถประมาณ 0.8410 rad/s หรอประมาณ 6.92 rad/s
รปท 5 แสดง Model validate ของคาทวดไดและคาท
แบบจ าลองสราง
6.9183 /rad s
รปท 6 แสดงผลการแปลงอนกรมฟเรยรของสญญาณ
ความเรง
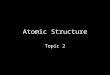
4. การจดเตรยมอปกรณ อปกรณส าหรบการทดลอง สามารถแบงเปน 3
สวนคอ Host computer, Target computer และ ชดทดลองตวแบบป นจนชนดมขาหยงชกรอก สวนแรก Host computer เปนสวนทผวจยใชควบคมและปอนค าสง มสวนประกอบหลกเ ปนซอฟตแวร เชนระบบปฏบตการวนโดว โปรแกรม Labview และ โปรแกรม Matlab เปนตน การควบคมและสงงาน สามารถสงผานขอมลทางสายแลนไปยงเครอง Target computer สวนทสองคอ Target computer ท าหนาทรบสงสญญาณและท าการประมวลแบบ Real time สวนประกอบหลกของตว Target computer คอ ชด Multifunction Data Acquisition card ของบรษท National instrument (NI) รน PCI 6221 และสวนสดทายเปนตวแบบป นจนชนดมขาหยงชกรอก อปกรณสวนน เนนไปทางดาน Actuator และ ตวรบร (Sensor) เชน แหลงจายกระแสไฟ (Power supply), วงจรขยายสญญาณ (Power amplifier), Encoder และ มาตรความเรง (Accelerometer) เปนตน การตออปกรณทงหมดสามารถแสดงไดดงรปท 7
Host computer
Target computer
Power supply
Gantry crane model
DAQ card (NI PCI 6221)
Uncertain payload
รปท 7 แสดงการจดเตรยมอปกรณการทดลอง
5. ผลการทดลอง การทดลองมจดประสงคเพอทดสอบความทนทาน
ของเทคนคอนพต เชป ป งตอการ เปลยนแปลงคาความถธรรมชาต และอตราสวนความหนวงของระบบ จากสวนท 3 สาเหตของการสนในระบบป นจนแบบมขาหยงชนดชกรอกคอ แขนลกตมนาฬกาทตดกบตวรถลากการสนสะเทอนทเกดขนสามารถใชเทคนคอนพตเชปปงเพอจดการไดโดยท าการปรบ

การประชมวชาการเครอขายวศวกรรมเครองกลแหงประเทศไทย ครงท 27 16-18 ตลาคม 2556 พทยา จงหวดชลบร
DRC-2021 สญญาณอางองของรถลาก งานวจยน ท า การเปรยบเทยบการทดลอง 3 แบบคอ เทคนคอนพตเชปปงแบบ ZVD, ZVDD และ ไมใชเทคนคอนพตเชปปง (Unshaped) โดยสญญาณอางองใหมทไดสามารถแสดงไดดงรปท 8 จากรปเสนไขปลาสน าเงนคอเสนทางการเคลอนทของระบบทก าหนดใหรถลากเคลอนทตามสญญาณ Square wave ทมชวงกวาง 0.08 เมตร และความถมคาเทากบ 0.05 Hz ระยะเวลาท าการทดลองทงหมด 100 วนาท เสนทบสแดงคอ Input shaper แบบ ZVD สามารถค านวณไดจาก (4) สวนเสนปะสด าคอ Input shaper แบบ ZVDD สามารถค านวณไดจาก (5) โดยท K หาคาไดจาก (1) สวนคาความถธรรมชาต (
n ) ใชคากลางท 6.93 rad/s และอตราสวนความหนวงใชคา 0.0033
1 12
2 22 2
2
3 32 2
10
2 1
2
2 1 1
2
2 1 1
n
n
A tK K
KA t
K K
KA t
K K
(4)
1 13 2
2 23 2 2
2
3 33 2 2
3
4 43 2 2
10
3 3 1
3
3 3 1 1
3 2
3 3 1 1
3
3 3 1 1
n
n
n
A tK K K
KA t
K K K
KA t
K K K
KA t
K K K
(5)
เมอใหรถลากเคลอนทตามสญญาณอางองตามรปท 8 พบวาตวควบคมแบบพไอดทใชควบคมต าแหนงรถลาก สามารถขบเคลอนรถลากไปตามสญญาณอางองไดตองการไดด พจารณาไดจากรปท 9 จากรปกราฟเสนปะไขปลาสเขยว เปนผลการทดลองแบบไมปรบสญญาณอางอง มผลตอบสนองทเรวทสด รองลงมาเปนกราฟเสนทบสแดง ซงกราฟดงกลาวเปนการปรบสญญาณอางองโดยใช Input shaper แบบ
ZVD สดทายเปนกราฟเสนปะสด าถกปรบสญญาณอางองโดย Input shaper แบบ ZVDD จากชวงแรกของผลการทดลองพบวาระบบเคลอนทไมถงคาสถานะอยตวทตองการทงในสวนของ Input shaper แบบ ZVD และแบบ ZVDD ปญหาทเกดขนอาจเกดจากสญญาณตกคางในระบบ ส าหรบชวงการท างานอนระบบสามารถท างานไดตามปกต
รปท 8 แสดงเสนทางการเคลอนทของรถลาก
รปท 9 แสดงผลการเคลอนทของ Cart เมอใชตว
ควบคมแบบพไอด คา Control input ทปอนเขาสระบบสามารถแสดงไดดงรปท 10 จากรปพบวาเมอไมมการปรบสญญาณอางอง มการใชคา Control input ทสงมากแสดงไดจากกราฟเสนไขปลาสน าเงน เมอเปรยบเทยบกบกราฟเสนทบสแดงซงปรบสญญาณอางองโดย Input shaper แบบ ZVD และกราฟเสนปะสด าซงปรบ

การประชมวชาการเครอขายวศวกรรมเครองกลแหงประเทศไทย ครงท 27 16-18 ตลาคม 2556 พทยา จงหวดชลบร
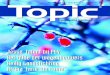
DRC-2021 สญญาณอางองโดย Input shaper แบบ ZVDD พบวาชวงคาสงสดของ Control input เมอใช Input shaper ทงสองชนดลดลงมากกวา 50 % เมอเปรยบเทยบกบการทดลองในสวนทไมปรบสญญาณอางอง การทดลองทงในสวนของสภาวะการท างานปกต และสภาวะเพมน าหนกบรรทกไมแนนอน ตวควบคมแบบพไอด และสญญาณอางองท ป อนใหรถลากถกก าหนดใหมคาคงท โดยน าหนกทใชคอเหรยญหนงบาทจ านวน 40 เหรยญ มน าหนกรวมประมาณ 140 กรม การทดลองในสภาวะการท างานปกตองศาการสนของแขนลกตมนาฬกาสามารถแสดงไดดงรปท 11 จากรปกราฟเสนไขปลาส าน าเงนคอผลการทดลองเมอไมปรบสญญาณอางอง มคาองศาการสนเฉลยอยท 0.2087 rad กราฟเสนทบสแดงแสดงการปรบสญญาณอางองโดย Input shaper แบบ ZVD มคาองศาการสนเฉลยอยท 0.0531 rad และสดทายกราฟเสนปะสด าคอการปรบสญญาณอางองโดย Input shaper แบบ ZVDD มคาองศาการสนเฉลยอยท 0.0348 rad จากกราฟพบวาชวงกวางของการสนมขนาดสลบกน เนองมาจากความถของแขนลกตมนาฬกามความสมพนธกบการเคลอนทของรถลาก ท าใหเกดการหกลางและเสรมกน ผลการทดลองในสวนนพบวา Input shaper แบบ ZVDD มประสทธภาพในการลดการสนสะเทอนสงทสด เมอท าการเพมน าหนกบรรทกไมแนนอน สามารถพจารณาไดจากรปท 12 กราฟเสนไขปลาสน าเงนมการสนสะเทอนเกดขนอยางมาก ชวงกวางของการสนมแนวโนมขยายขนาดขน สามารถวดคาองศาการสนเฉลยอยท 0.7447 rad เมอท าการปรบสญญาณอางองโดยใช Input shaper แบบ ZVD แสดงไดดงกราฟเสนทบสแดงพบวา การสนทเกดยงมขนาดทสง โดยคาเฉลยการสนอยท 0.1531 rad สดทายเปนกราฟแสดงการสนของแขนกลเมอปรบสญญาณอางองโดย Input shaper แบบ ZVDD จากกราฟแสดงเปนเสนปะสด า ซงคาการสนทเกดมคาใกลเคยงกบการทดลองใน สภาวะการท างานปกต คออยทประมาณ 0.0397 rad
รปท 10 แสดงพลงงานทปอนเขาสระบบ
รปท 11 แสดงการแกวงของแขนลกตมนาฬกาใน
สภาวะการท างานปกต
ผลการทดลองทงหมดสามารถสรปไดดงตารางท 1 เมอพจารณาในตารางพบวา Input shaper แบบ ZVDD มประสทธภาพสงทสดในการลดการสนสะเทอน แตสงทแลกมาคอ เวลาทเขาสสถานะอยตวของรถลากมคาสงขน อนเนองมาจากเวลาหนวงของตวเทคนคอนพตเชปปง และ Input shaper แบบ

การประชมวชาการเครอขายวศวกรรมเครองกลแหงประเทศไทย ครงท 27 16-18 ตลาคม 2556 พทยา จงหวดชลบร
DRC-2021
ZVD มความทนทานตอการเปลยนแปลงของคาความถธรรมชาต และอตราสวนความหนวง ถาค า ต ว แ ป ร ด ง ก ล า ว เ ก น ข อ ง เ ข ต ท ก า ห น ด ความสามารถในการลดการสนสะเทอน
รปท 12 แสดงการแกวงของแขนลกตมนาฬกาใน
สภาวะเพมน าหนกบรรทกไมแนนอน
ตารางท 1 แสดงผลการทดลองของการลดการสนสะเทอนของแขนลกตมนาฬกาทงสภาวะการท างานปกตและการเพมบรรทกน าหนกไมแนนอน Condition Types of
shaper Settling time of cart (sec)
Deflection angle (rad)
Normal
Unshaped 0.27 0.2087 ZVD 1.04 0.0531
ZVDD 1.51 0.0348 Carrying uncertain payload
Unshaped 0.27 0.7447 ZVD 1.04 0.1531
ZVDD 1.51 0.0397
6. สรปผลการทดลอง จากผลการทดลองพบวาInput shaper แบบ
ZVDD มประสทธภาพสงทสดในการลดการสนสะเทอนทงในสภาวะการท างานปกต และสภาวะบรรทกน าหนกไมแนอน แตเมอพจารณาผลตอบสนอง
ชวครของรถลากพบวา Input shaper แบบ ZVDD มผลตอบสนองชาทสดเชนกน ซงเปนสงทตองพจารณาตามความหมาะสมของระบบ และเทคนคดงกลาวเปนเทคนคแบบ Feed forward control เทคนคจงเหมาะกบงานทางดานปรบปรงคณภาพการท างานภายใตขอจ ากดดานรายจาย
7. เอกสารอางอง
[1] Fliess, M., Levine, J., & Rouchon, P. (1991). A simplified approach of crane control via a generalized state-space model. In Proceedings of the 30th conference on decision and control, Brighton, England. [2] l-Garni, A. Z., Moustafa, K. A. F., and Nizami, S. S. A. K. J., “Optimal Control of Overhead Cranes,” Control Eng. Practice vol. 3, 1995, pp. 1277–1284. [3] J. H. Park and S. Rhim, Experiments of optimal delay extraction algorithm using adaptive timedelay filter for improved vibration suppression, Journal of Mechanical Science and Technology, vol. 23 (4), (2009), pp. 997-1000. [4] Fang, Y., Dixon, W. E., Dawson, D. M., & Zergeroglu, E. (2001). Nonlinear coupling control laws for a 3-DOF overhead crane system, In Proceedings of the 40th IEEE conference of decision and control, Orlando, FL, USA. [5] Moustafa, K. A. F., and Ebeid, A. M., “Nonlinear Modeling and Control of Overhead Crane Load Sway,” ASME Journal of Dynamic Systems, Measurement and Control, vol. 110, (1988), pp. 266–271. [6] Singer, N. C., and Seering, W. P., “Preshaping Command Inputs to Reduce System Vibration,” ASME Journal of Dynamic Systems, Measurement and Control, vol. 112, (1990), pp. 76–82.

การประชมวชาการเครอขายวศวกรรมเครองกลแหงประเทศไทย ครงท 27 16-18 ตลาคม 2556 พทยา จงหวดชลบร
DRC-2021
[7] Singh and W. Singhose, (2002), Tutorial on input shaping/time delay control of maneuvering flexible structures, Proceedings of the American Control Conference, Anchorage, USA. [8] William S, (2009). Command shaping for flexible system: A Review of the first 50 years, International journal of precision engineering and manufacturing, vol 10, No. 4, pp.153-168.