Embed Size (px)
DESCRIPTION
Upravnjanje velikim sistemima, elektronski fakultet
Citation preview

rszlike iasno ie cia i. t sludaiu multivariiabilnih sistema potrebno prouditi i neker-rsobine koie, u op5tern qludaju, nisuarisutne kod sistema sa iednim ulazorrl i ied-giturzlazlcym, fla bi se tlobila iasniia slika o ovim razlikams, u ovoj i sledecim gla-vama bi6e im posveiena posebna paZnja,
o &dan o!.Tnatajniiih protf .#saui9.{:}r7ca1ilatskog ttpravljgnj4 iLjanj+ ie p1o-blem ,,integriteta". Ovaj problern odnosi se na studaj
znatajnijih problema prisutnih kod multivarijabilnih sistema auro-makadapoiaianieuiednoj i l iv i5e@espregepostaieident idnonul i . .Re-
_{u_kciia pojadanja rnoZe fgzultovati usled otkazivanja ili ,,saturacije" pojedinih iz-vr5nih organa ili senzora, ili jednostavno ako je u toku rada sistema potrebno isklju-diti pojedine gralle u po'/ratnoi sprezi. U sludaju sistema sa jednirn ulazom i jed-ninr izlazrnn reSenje_ o1/og problema ie iednostavno: sistem ie ostati stabilan posleotklaniania porrratne sprege, ukoliko je sistem bez povrarne sprege bio sta6iian.U sludaiu multivariiabilnih sist.:ma o\rai problem ie komplikovaniji. Moguie ie,i pg,..A tgga Sto je sistgm bez por/ratne sprege bio stabilan, da se sisteni saFciiia!-noni spregon dest-abili,zira oAvar?njem.jednejl rl!$e .grhna u povratnoj
-sprezi.
J" Diugi znataian froblem prisutan kod upravli anja multivariiabilnim siste-mirna su razna struktulrrg-_gggniqenig- koja se mogrr postarriti sistemu upravljanja' ' formacionom .oiil" ,rpt"it;anja baziri"
"" ta":ti;i bpti-
malnog uprq_r'liarlia multivari-iabilnim sistemimi zahteva mererije svih promenlfivihkaig_+:_fTi5u stanje
-p.roTsa._ll_V9likory broju sludaieva realna fizidko-tehnidka
ogranidenia ne dozvoljavaju merenje svih promentjivih procesa. Ukoliko bi to ibilo moguie, ocigovaraiu6i merni sistem, a samim tim i sistem upravljanja, popravilu je nepouzdan, skup i zahteva re5avanje nlr;a dodatnih tehnidkih prcblema.Zbog taga se posledniih godina iine veliki napori da se na osno\ru merenja sarrronekilr koordinata vektora stania (nepotpuni vektor stanja) realizuje upravljanie.Zo Pri ovome posebno mesto zavzimaju metode upravliania sloZenim tehnidko--tehnolo5k@ gde se upravljanie realizuje skupom @dtffi r-latora i decentralaovanom informacionom stnrkturom. O ovim proble-mima biZe vi$e redi u drug;n*delu ove kniige,," I(onadno tu ie i problem dekuplovanog (neinteraktirm upravljanja kada
- ser ra-prime, z;dtteva prorrrctra ra.
-- L-- .
tlve, a oa se prltome ne afektiraiu ostali alazi.
ffi
l---'
2.2: KARAKTERTSTTCNE FUNKCTJE STSTEMA AUTOMATSKOq\XUPRAVLJANJA 'J-'
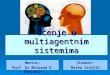
Ilgilig analue osobina multivariiapilnlh;iqtena_sa powatnom spregom pos-.. matra se lineirni vremenski nepromenliiimm, diji ie blok-diiagrarn dat na slici-2*2'L*
Osnovni elementi ovog sistema su: oliek -upravfiqsial gegulator i sistemmerenia Geqg). Qhiekt upravliania definisan ie iednadinom:
'----t- '*-
_f_-=_:i
1Jt-G(s)z( ' )+d(s} (2.2.t)
-g4g- ie-q!)-.flr$kcija prenot" oUiekta upravljania, d,ime.-iie pzctn..Na slidan nadindeJbi5e- oe i regulator;
(2.2.2)
(2.2.3)
P (r), F (r) i N (s) mat-
. sdtrcsno sistern merenja:(s) :NG)(yG) * l ( ' )_
r (s), z (s), d (t) i rl (t) vektori, a /( (s),aimenziia.€g*+z(*_s$):
_rlce oogovalalllcm
36

Iz bloka diiagrama datog na slici 2.2.1 uodava se da se odziv sistema sa pov-rarnorn spregom uporeduje sa ref,erentnim ulaznim signalom r (s), i da se :ulazu obiekt upravliania, ti. vektor ulaza z (s) formira na osno'ru ovog uporedenia.Iz ovakve strukture sistema automatskog upravliania proizlaze i csnorrne karak-teristike sistema upravliania, odnosno niegove mogucnosti da daje zadovoliarraiuie
rI
II
III("1
Fo "J^e J"Jil
obJekta :upravl janjai
Referenftnlulaz I
r (s) lg( s)
Regulatorpov:ratnoJ
d(s)! v(et
t Predf i l tarI
I
I
IIIII
III
II
IL T:T1;
I rL-- - - - - i
SENZOFJ
RSGI.II,ITOR
St. 2.2.1. Multivariiabilni sistem automatskog upravlianja
odzive i pored postojania spolinih porem&ia, opisanih vektorom d (r), i/ili vari-iaqlig pafqqetara objelrta upravlia*ia. Ilovoms ie iosnotno pEimu€sfuo bistemasa.powatnom spregom nad iistemimabez povtatoe sprege, ier sistemi bez povratnesprege nemaiu nikakve informaciie o staniu obiekta upravliania, rzuzeu gnih infor-;ariia koie su bile na".rcspolagair;*prrnego*to ffipravlj*ie i zapodetti.
"
Na osno\ru blok-diiagrarna datog na slici 2.2.1 mogu se izrresti inazi za a-radunavanj e'izlazrre promenliive y (s) u,sled delovania referentnog ulaza r (s), spoli-nieg poremeCaja d (r) i Sumova merenja zl (s). Takode se mogu izradunati i vari-iaciie izlame promenliive y (s) rrsled razlike izmedu modela obiekta upravlianiaG* (s) i swarnog obiekta upravlinia G (s).
Pre toga, potrebno ie io5 iedanput naglasiti da je anahza u ovoi glavi ograni-dena na linearne wemenski nepromenliive sisteme i pored toga Sto ie generalaaaijamnogih rezultata za linearne rrremenski promenljive sisterne direktna. Pretpostavi6ese da svi porelnedaii imaiu uticai na izlaz iz sistema ./ (s), da su svi signali multi-varijabilni i da su mbtematitki modeli obiekta upravlieia, regulatora i mernogsistema modeli konaEnih dimenziia. Treba imati u vidu da se u praksi, po pravilu,ne raspolahe stvarnom prenosnom firnkoijom obiekta upravljania G (r), ved samofunkcifom prenosa modela objelaa upravljania G* (s). Izmedu ove dve firnkciielogieoo ie uspostaviti slededu relaoiiu:
6ity . 6 t i l +{e Gl G(s):G'Q_+8G,O-- (2.2.4)
Pri a&^hzi uticaia spolinilr poremedaia ilogiEno je pretpostaviti da su funkciie prenosa
Sumova merenia na iilIaa sistemapredfiltera P (s), regulatora u pov-
3t
Kaskadniregulator L-_
oBJEKT -UPRAVUAITJAIII
I
rI
I
I
merenJa r

ratnoi sprezi F (t), kaskadnog regulatora-K (s) i sisterna merenja N (s) dobro poznate.Dnr'1im redima, u ovoi fazi analize prihvatljiva je pretpostavka da se nepreciznostiu vezi s ovim prenosnim funkciiama mogu zanemariti, pogotovo ako se ima u viduda projektovanie i sintezu regulatora i sistema rnerenia realizuie proiektant i dase na tadnost ovih elemenata moZe direktno uticati u postupku sinteze. Kona6no,ne gubeci od op$tosti u cilju poiednostavlienja izvodenja biie pretpostavljenoda ie:
P(')-r ,FG)-I iN(s): / .
U ovom sludaiu blok-diiagrun sistema dat ie na slici 2.2.2.
(2.2.s)
Sl. 2.2.2, Multivarijabilni sistem automatskog upravljanja
Imaju6i u viduna6in:
t j . :
gorniu analizu, signal greSke e (s) mohe se definisati na slededi
e(s) : rG)-r l (s) -dG)-G(t)K(t)e(s) (2.2.6
e(s) : ( I+ c(s)K(s))- l ( tG)- IG)-d(r) (2.2.7)
Koristedi iednadinu (2.2.7) izlmi sigpal y (s) moZe se predstaviti u obliku:
Q.2.8)
y(s) - c(r)K(r)(I + c(r).K(r))-t(r(r). IG)) + (/ + G(s),<6r)-1 dG)(2.2.e)
Alternativni iaazi za y (s) mogu se dobiti i ako se kod izvodenja pode direktnood y (s). Tada je:
y (s) - d(s) + G (s)K(') (' G) - v(s) - I (s) (2.2.r0)odnosno:
yG) : ( I + c( ')K(r)- l c(s)K(s)(rG)-I ( ' ) + (/ + G(')I((s))-t d( ')(2.2.11)
Na analogan nadin mogu se odrediti i tnazi koji odreduju uticaj referentnog ulazar (s), spoljnih poremedaia d (t) i Sumova merenia na vektor upravljania z (s). Uovorn sludaju dobija se:
z (s) - KG) (/ + c (s) K(O-1 (r G) - q G) - dG) (2.2.12)
Odnosno, vektor izlazay (s) i vektor upravljania u (s) mogu se predstaviti u oblilctrsume od tri komponente, koje se generi$u usled delovania r (s), d (s) i 1 (s):
38
H[:]1 :V[:]l .t;: []l .H8l (2.2,13)

pri ovorne kornponente vektora l (t i a (s) definisane su u funkciji
" (t, d (t) i I (t) na slededi nadin:
Hi:llt;: []lt;81
gde ie:
Ws (s) : c (s) /< (')I + G(s).K( ' )
I
:[Fl,f'rc,,l 'c'r: [fll (,)w.J'c):[:{'flr,,Jrr,r
l lscG)t II rclol | '
promenliivih
(2.2.14)
(2.2.rs)
(2.2.16)
(2.2.r7)
(2.2.r!)_
(2.2,22)
(2.2.23)
(2.2.24)
(2.2.25)
39
t :
W1t1 :-
Izrazi (2.2.9) i (2.2.12), odnosno (2.2.13) definiSu odziv sistema y (r) i ulaznogvektora z (r) usled delovanja referentnog ulaza r (r), ulaznog poremetaia d (t)i $uma merenja I (r) u funkciji swarne prenosne funkcije G (r). ^N.ledutim swarnavre&rost prenosne firnkcije G (s), kao $to ie napomenuto, nije pozrrata, r'ed samoniena aproksimativna wednost, odnosno prenosna funkcija matematidkog modelaobjekta upravlianja G" (s).
Zbog razlike izmedu G(s) i G*(s), videti iednadinu (2.2.4), iasno ie da pos-toii i razlika u odzivima siitema kada se koristi strtarni model sistema i niegovaaproksimativna wednost. Neka ie stvarni odziv sistema usled delovanja referentnoguiaza r (s) definisan sa:
y(r) : ( I + G(t).K(t)- l G(s)K(r)r(s) \ (2.2.19)
Na analogan nadin y* (s) moZe se definisati kao, /.
:
y* (s) : (I + c* (s) K (t))-1 G* (t) /< (s) r (r) (2.2.20)
Sad,a se lako moZe pokazati na osno\m (2.2.4), (2.2.1.9) i (2.2.20) d,a. se razlika uodzivima 8y G)r\ r' 8y G) : y G) -y* (s) (2.2.21)l t r ?- x -xmoZe predstaviti u obliku:
8y G) : (/ + ctt /( (s)-r 8 c (') K (s) e (s)gde ie:
U speciialnom/
(,< G) Gf 1s1;-t
Prema tome:
Ia (s) : r G) -yf (s).
\sludaju kada ie G (s) kvadratna matrica i kada
postoii, tada je: ,*/
8y (') : (I + G G) ,< G)-t I G (s) (@r (t)-ly* (s).
l lsvG)l | -lln7ctl | =I l/ + c (')?< (tl I

Iz ovih izraza. evidentno ie da funkcija G (r) /( (s), funk ciia I + G G) ,< (s) i funk-aiia w, -- (/+ c(s),<G))-1 cG),<G) - G(s)K(s)(I+ cG),<G)-i igraiuznaEainu ulogu u analizi i sintezi multivariiabilnih sistema automatskog upravlja-nia sa polTatnorn spregom. Po an'atogiii sa'sistemima sa fednim ulazoti i'iednirnrzlazorn funkcija
LY(') - G G)K(s) (2.2.26)
naziva se funkcijom powatnog prenosa, ftrnkcija W, (s), iednadina (2.2.17), na-ziva se fiurkcijorn spregnutog prenosa, a funkcija D (s):
D(')- I+GG)K(s)
naziva se povratnom uporednom funkcijom.
(2.2.27)
S aspekta sinteze multivariiabilnih sistema automatskog upravliania jasnoje da se, u principu, date iednadine rnogu koristiti za odredivanie strukture regu-latora K(s) koiim bi se postigli zadati zahtevi o pona5anju sistema. IJ ovorn odeljkuproblem sinteae multivariiabilnih sisterna neqe bili_uetiran. I pored roga, pouebnoib podvu6i da iako nrnogi rezultati klasidne teorije automatskog upravlianja imaju
i prirodnu generalizacliu kod multivariiabilnih-sistema automatskog upravliania, ove- gefl'etali-acr;ie ne vode ka--rnetodama za sur'=teztr sa istim pratitienim zrraCaiem i
snagom kao u sludaju sisterna sa jednim ulazom i iednim izlazom. Da bi se poten-cirale neke fundamentalne razlike koje postoje kod upravliuia multivariiabilnimsistemima i kod upravljanja sistemima sa iednim ulazom i jednim alazom bi6eposmatrana dva primera.
orreet@Posmatra se problem pra6enia, ti. sludaj kada se zahteva da odziv sistema
y G) bude iednak referentnom ulazu r (s). Na osno\ru jednadine (2.2.5) sledi daie odziv sistema, usled delovania referentnog ulaza, dat sa:
y (s) - G (s) K(s) (/ + G (s) /<('))-1 r (s).
Jasno iE da za stueai-* J i odzii sistema postajE iednak t.f.i.ot*o*liko ie:
Naravno, uslov (2.2.29) ne ueba da bude ispunien za cea opseg udestanosti,ved samc ze onai opseg utestanosti pri koiem referentni ulaz r (s) ima anadajnuenergiju. Medutim, za razliku od sludaia skalarnog ulaza, li. kada se posmatraiusistemi sa jednim ulazom i jednim izlazom, uslov (2..2.29) treba da bude ispuniensamo za one ,rpravce" u skupu ulaza u kojima deluie referentni ulaz. Pri ovometreba imati u vidu da u sludaiu multivariiabilnih sistema postoji beskonadan brojrazliditih ,rpravaca" ulaznog vektora. Na primer, neka referentni ulaz deluie upravcu definisanom vektorom pt dimenziie tn x l. Tada se vektor r (s) moZepredstaviti u obliku:
(2.2.28)' : - : -
ulazu, uko-
4.22e)
r (s) : pf(s) ,
gde ie F (s) skalarna funkcija od s.
Sada se uslov iednakosti referentnog ulaza
nmesto (2.2.29).
40
(2.2.30)
i izlaza iz sistema svodi na:
G(s)KG) Q + cG)/((s))- t r ^ ' p (2.2.3r)

Znati, da binosti, potrebno ieu datim pravcima
ttslwi (2.2.29) i (2.2.31) bili ispunieni prida funkcija powatnog prenosa G G) r<G)pri tim udestanostima.
integralni rygulator
Detaliniia raztada koncepcija izloZenih u prethodnom primeru bi6e izrnsenana sludaju multivarijabilnog integralnog regulatora. Na sliii 2.2.3 dat ie blok--diiagram mulgvarijabilnog sistema automaakog upravljania sa integratnim regu-latororn u direktnoj grani. D-a bi se poiednostavila and\iza ovog pt6bl.*a, prer-postavlja se d" i9-energiia ryfgreltnog ulaza r (s), spoljnjeg potJrn.taia dGj i ne-pteciznosti modeliranja 8 G (s), koncenuisana
- -pri- niitim Ldot*ostima.
datom opsegu udesta-bude dovoljno velika
ulaza r (s).
(2.2.32)
Sl. 2.2.3. Multivarijabilni sistem sa Pf regulatorom
Naipre se posmatra odziv sistema usled delovania referentnogOn se lako moy'.e odrediti rz jednadine (2.2.11) za:
/< (s) : tro ti-s
I l?^r-L . .Ko . \y (s) : l / + G(r): l G(r)-- ' r(s)\ s/ .s
odnosno:-+- (Is -i- G (s) /(o)-r G (s) /(o r (s).
Neka je referentni ulaz dat odskodnom funkcijom:
e
s
-S-1d" se primenorn granidne teoreme Laplasove transformaciie
bilnog sistema u staoionarnom stanju dobija u obliku :
(2.2.33)
(2.2.34)
odziv multivariia-
l imy( t) : lu lry(s): I t "q(Is * G(s)/<o)-1 G(r) /(op: p (2.2.35)t - '@ s+0 s+0
Pri ovome se pretpogtlylia da ie sistem sa zaworenom powatnom spregombio stabilan, da mauica G (r)fr postoji i da ie invertibifna.
Lako se moZe pokazati da su uslov stabilnosti sistema sa zaworenom pov1at-o9* spregom, k-*o i egzistencija i invertibilnost matrice G (o) I(0, potrebni i kododredivania odziva sistema usled delovanja spoljnieg poremediii a G), koii jedat sa:
''" 12.2,361I
:s
dG)
4I

{
ti. d (s) ie takode odskodna funkciia. Tada ie:
lim y( t) : lim s (/s * G (s) I(o)-r 8 : 0., -+ co s*0-
(2.2.37)
Koristeci sliEne argumente razlika odziva sistema usled razlike izmedu pre-nosne funkcije objekta upravliania G (t) i prenosne funkcije matematidkog modelaobjekta upravljania moZe se predstaviti u obliku:
lim 8y (r) : lim s (I + ctt K (s)-r I G G) (ct(s))-l y/(r) 1z,.z.zt1, -+@ s -+0
odnosno:
l imsy(r) - I ims(/s * cGfr '(s))- '8c(s) (c' lG))-tG.;((r)): o (2.2.3s)t ->@ s +0
Pri odredivanju iednadine (2.2.38) kori$dena je jednadina (2.2.24).
Drugim reEima" idealno pradenie referenmog ulaznog signala r (s) i elimina-cija greike u ustaljenom staniu usfal- del-ovirnie- spoljnog poremedaja d (s), kao iusled fazlike izmedu modela i swaroog-sistema I G{s), bili su-postignuti time --
3to ie-preniwra fln*"ii" *o
O G) poprimata beskonadnu weanost u svim prav-s
cima pri nultoi utestanosti. U swari, ovo ie bilo postignuto postavljaniem zr nulau prenosnoi funkciji izrnettu poremedaia i izlaz,a u tadki s : 0. Medutim, ovo upraksi moZe, ali i ne mora da bude prihvadjivo, jer dodavanje zr integratora di-namici objekta upravljania moZe da iskompliluie problem stabilizacije sistema.
1 Medutim, dodavanje zr integratora bilo je neophodno ier je bilo dozvoljeno da]|,. vektor porernedaja 8 (s) moZe da uzme bilo koji ,,pravac" u skupu wih vektorat| alimenziie z.
= raeta atalizaznadaino se moze pojednostaviti ako se pretpostavi da je samo*,,qi9 jedao pravac, definisan vektorom Eo, od praktidnog interesa. Drugirn redima, neka je

2.3. STABILNOST
Kako je ved napomenuto, u ovom odeljkrr ukratko Ce biti razmatrani nekiproblemi prisutni kod karakterizaciie granice stabilnosti rnultivariiabilnih sistema.Detalinija analiza data je, medutim, u Gtavi 4.
Kada s9 govori o granicama stabilnosti sistema sa powatnom spregom prven-sweno se misli na odredivanje donie granice ,,velidine" najmanfe penuiUacijepovratne uporedne funkciie D (s), iednadina (2.2.27)., koja dovodi do-destabiliza-ciie sistema. Pod
',velidinom" se podrazumeva svaka fizieti prihvatliiva mera.
$g-bjlgost_sistema- kao i nigeoy= ogziv usled delovania referentnbg ulaza, spoljnihpolemeqla i S,TmovgJngrenla dr{eltno s=} eovezapi ii nEvom powatnom-iffi-r U Glavi 4.
tabilnostidaseizme{unci.migalnevredntstifunkeijepowat-nog- prenosa W (s), jednadina (2.2.2,6), i niene iwarne vred,nosti usport.vi rl.d.6tmeduzavisnost:
V* (s) : (I + A tY (t)) V (s) (2.3.t)gde ie A W (s) matrica poreme6aja, 6ija ,rvelidina" ne mora da bude mala.
Sada se ica stabilnosti mole definisati kao ,rvelidina', ,rnajmanje"turleqjl A W (t) koja destabili5e siG, za - ( r*w*(s
Ijena slededa relaciia:g + lv* (so)) xo : o
Ukoliko ie nominalni nepernrrbovani sistem bio stabilan,
i+w(N)+oi da se moZe definisati vektor xt * 0, tako da ie:
xL : (/ + ly (so)) xo
rice W" (s) ekvivalentancoeCorxo*Qzadovo-
(2.3.2)
tada ie iasno da ie:(2.3.3)
Odnosno, uslov nestabilnosti perturbovanog sistema moZe se predstaviti
(2.3.4)
u obliku:
(2.3. s)(/ + (/ + L W (so)) lV (so)) rr : 0:gde ie so takvo da ie Re (so) 2O, a vektor xL definisan ie sa (2.3.4), odnosno:
x1 =-AW(so)Ws(so)xt (2.3,6)gde
Ws go) : W (so)(2.3.7)
I + lV (so)
Jednadina (2.3.6) ukazuje na to da postoii odredena meduzavisnost izrnedu gra-nice stabilnosti multivariiabilnog sistema, odnosno L,lY (s) i powatne uporednefunkciie. MoZe se redi i da ie A lY (s) na neki nadin obrnuio pioporcionalna mat-rici V, (i)_.
Naldtbnie ove meduzavisnosti u sludaiu multivarijabilnih sistesra niie nimaloiednostavan problem. Nasuprot multivariiabilnim sistemima, odredivanil granic€
44
1
,e:

sisterna sa iednim ulazom i iednim izlazom je relativno iednostavant ie pozrtato da se granice stabilnosti sistema sa iednim ulazom imogu izr.aziti preko preteka faze i preteka poiadania. LJ ovom slu-
velidine se mogu ,direktno odrediti rz jednadine (2.3.6).
U tom cilju pouebno ie podrru6i da ie u sludaiu sistema sa iednim ulazomi ;"at*" dryory lY (t) skalarna funkciia. Drugim redima, iz (2.3.6) za skalarnoV (t) stedi da ie:
LIV(so) : - I
lVs (so)(2.3.9)
(2.3.1l)
0,zakoji je:
(2.3.12)
Da bi se do$lo do definiciie preteka poiadania, date u klasidnoj teoriji automaakogupravljatia, potrebno je predstaviti pernrrbaciju L W u obliku:
LIY (s) : g- l (2.3.9)
Sada seza koji
za neko so zz koje ie Re (so) > 0.
Pretek faze moZe se definisati na slidan nadin, usvaiajudi da je:
LIY (s) : e-ta - I
Sada se pretek faze moZe definisati kao najmania vrednost ugla. @, @ )
t e- |Q_l : ly-r(sr) l_
(2.3.16)
-pretek poiadanja moZe definisati kao ryl*,g+fa Updnost skalara grg ) l,
ie; --- --:--- -:.-
----t-
- - - - s- lV-L(so)--++ I { , -10-)-lV6 (so)
- l
Wt (so)
T? klasidne *t" automatskog ulrr-avljania dobro ie poznato d:a ie vrednosrkorrr= 'pleftsne p'fbmenliive _ro, koja.zadovoljava relaciju (23.10), dara sa:
(2s.13) -
tg W(l .-) : - 180" (2.3.14)
dok ie wednost kompleksne promenliive so, koja zadovoljava (2.3.12), data sa:
so: jat (2.3.15)
gde ie G)l prese€na udestanost poiadanja, definisana sa:
. ltY(i altl : I
Kod multivarijabilnih sistema automatskog upravljania, na nesre6u, nemoguCeie izw{iti generalizaciju pojmova preteka faze i preteka poiadurja, ier kod multi-variiabilnih sistema postoji beskonadan broj ,rpravaca" vektora ulaza i vekt ora izlaza.Po3to ne postoji odita generalizacija poimova preteka faze i preteka poiadanla, oni99- i ne mogu direktno upotrebiti za karakterizaciiu granica stabilnosii arultivariia-bilnih sistema. o ovim problemima bi6e vi$e redi u Glavi 4.
45

ETTJMST
problem osetljivosti mulpivariiabilnih sistema automaakog upravljania delomf'Uio tretiran u odeliku 2.2. gde ie bio posmatran efekt varijacija u prenosnoj
hrnkciii objekta upravliania na vektor izlaza sistema y (s). Ve6i deo literanue kojise bavi problemom osediivosti sistema automatskog upravljanja upravo i tretirauticaj varijacija parametara obiekta upravljanja na odziv sistema. Sa praktidnog,inZenierskog aspekta odito je da ie to samo deo problema osetljivosti i da ie u prak-tilnim situacijama neophodno posmatrati i efekt variiaciia u prenosnoj funkcijisistema merenja, N(r) (videti sliku 2.2.1), i to ne samo na vektor izlaza y (s) vedi na vektor ulaza u (s).
Imaiuii ovo u vidu, u ovom odeljku biie posmatran problem osetljivostimultivariiabilnih sistema automatskog upravljanja sa powarnorn spregom, odnosnobi6e posmatran uticaj varijacija prenosnih funkcija obiekta upravljanja i sisternamerenja na vektor upravljanja u (s) i vektor izlazay (s). Poznato ie da je u klasidnoiteoriji aulg_matskog upravljanja kod sistema sa iednim ulazgm_,.r-jed.nuq izlazom_.uobidaieno da se osediffosr-rzrafrva- pfeko procentu-alnih variiaeila vektora y, (s)i u, (s), iednadina (2.2.14), rrsled varijacija mariea G(s) i-nF(s);pri demu se prer- -postavlja da se ref'erentni uhe, r (sfne m-enja: Ovaj prisnrp ie pogodan pre svega7.ato Sto omogudava uporedivanie senzitivnosti razliiitih sistema automatskog up-ravlianj dt ? i zbog toga Sto se iz njega moZe direktno i izvesti klasidna, Bodeovafbnkciia senzitivnosti t531.
Problem senzitirmosti multivarijabilnih sistema uetiran ie u referenci [S9].U ovoi referenci osetljivost vektora alaza yr(s) usled variiacije funkcije prenosaobiekta upravljanja G (r) definisana ie matricom koja mnoZi odziv y, (s) jednog,re*vivalentnog sistema bez powatne sprege", Sto rezultrrie u identidnu varijaciiuodziva swarnog sistema sa powatnom spregom. Ovai pristup ponar ie kao pris-tup komparativne osetljivosti i baziran ie na uporedivanju sisterna sa powarnomspregom i elvivalentnog sistema bez povratne sprege. Osno'rni nedostarak ovalvogtretirania problema osediivosti ie iasan. Ovim pristupom ne moZe se obulr.vatitii slu6ai varijaciia velrtora vlaz.a i vektora izlaza usled var-iiaciia u firnkciji prenosa
_ gistga qseniafi G)=Ja$ iedan aatajaunedostatak+risepa predlofenog u t891*-ia dTse on-teSto mbZ. primeniti ukoliico su poznatesarno grrtr-ice ,rve.!i6iie" p.t:
tubacione matrice, ier ie kod ovog pristupa matrica osetljivosti izr:a1ena u funkciii
--s_ warne rrrdnosti- -tafijaciia ftnkciie-prenesa -ebiekt+*uprav$ ania;-
U cilju prevazilatenja ponenutih ogranidenia, a i da bi problem osetljivostidobio Siri prakti&ri znataj, u ovom odeljku problem osetljivosti biie tretiran nanadin predloZen u [93]. Pri ovorle analaa senzitivnosti bi6e ogranidena na sisremeautomatskog upravljania, tiji ie blok-dijagram dat na slici 2.2.L Pretpostavlia se,pri tom, da relaciie (2.2.5) ne va?e, odnosno da ie:
P(s) * I, F(r) + I i N(r) + r. (2,.4.r)
Neka ie pojadanie u direktnoj grani i poiadanie u povratnoi grani nominalnogsistema oznadeno sa G (s) /< (s) i F (s) N (s), respektivno, i neka su sa A crr (s)i Apry (s) oznadena odstupanja ovih matrica od niihovih swarnih wednosti. LTtom sludaju izmedu swarnih vrednosti pojadania u direktnoj, odnosno powatnojgrani i niihovih nominalnih wednosti postoji slededa meduzavisnost:
F* (r) N* (s) - F (s) N (s) (I * Apjy (s))
G* (s) K* (s) - G (t) K(s) (I * Acx (s))
(2.4.2)
(2.4.3)
respektivno.
46

e u odzivu sistema yr (s) usled variiacija u pojadaniu direlctne,povratne grane moZe se definisati na slededi nadin:
Ly, (s) : yt (s) -y*, (s) (2.4.4)
(s) oznadena wi:dnost izlaznogvektora u sludaiu kada ie Acr (s) - 0
T-tr* (s) : o,
y' (s) :cG)K(') P(s)
r (s)I + vY(s)
gde ie:
Lako se moZe pokazati
gde je:
W6 (s) :w (s)
- I * tv(s)NAllidan nidin- moZe se definisati i odstupanje u vektoiu ulaza usled
._matrica I direktno!_i powatnoi granl
L u, (t) : zt (s) - a+* (s)Neka ie:
F* (r) N* (r) G" (r) - (F (r) N (r) c (s) (/ * Arrvc (s))i :
/(* (s) : (I * Ar (t))-t K (r).
Sada se q (s) mohe definisati kao ulazni vektor nominalnog sistema,sistema gde je Ar (s) --7 0 i Ara'c (s) : 0, ti.:
gde ie:
I;kb se moZ.e pokazati
gds'je: - *
LY(') - G (')/<G)FG)NG)
da ie:(/ + W (s))-L : f - tZ" (s)
u7 (s) :K(s) P(')
r (s)I +Vt(s)
(2,4.5)
(2.4.6)
(2.4.7)
(2.4.8)
yliiaoila
(2.4.e)
(2.4.ro)
(2.4.rr)
odnosno
Q^4.12)
_(L4.13)
(2.4.r4)
(2.4.rs)
(2.4.r6)
(2.4.18)
(2.4.r9)
rVs,(s) : = Wr(s)
- r ' - I -Wt(s)
Imajudi ovo u vidu i koristedi rezultate prezentirane u [93] lako se mogu dokazatisledede relacije koie defini5u odstupania u odzirm sistema i ulaznom signalu usledvarijaciia funkciie prenosa u direktnoi i powatnoi grani:
Ly, (t) : (/ + VV (t))-L Lex * LYo (s) Ara')y' (s)
L u, (s) : (/ + lh (s))-r Ar (s) + 1{st(t) Ararc (s)) u, (s) (2-4.17)
Relaciie (2.4.16) i (2.4.17) ponovo ukazuiu na znatai karakteristidnih firnkciiasistema automaiskog upravliarLta: fturkciia spregnutog prenosa lVs(s)' ti. Wtt(li powatne uporedne funtcile D (s), ti. Dr (s), gde ie:
DG)-I* tY(s)
Dr(s)- I*Vt(s)
47

ff (2.4.t6) i (2.4.17) rrspostavlien" ie direktna medtrzavisnost iznedui sistema i funkciie spregnutog prenosa i povratne uporedne funkcije.
vui s dobiienim rez,ulratima o osetliivosti multivariiabilnitr sistema saffiI-otn spregom potrebno ie podrmdi sledede dinienice: relaciie (2.4.16) it.i.tll izrredene su ne samo za infinitezimalno rnale varijacije ve6 i za proizvoljno
IJit" variiaciie. Takode, osetliivost sistema ie bila izralerta u funtciji poznare,norninalne vrednosti matrica, a ne u funkciji njihovih stvarnih, perrurbovanihrrrednosti, koje obidno i nisu poznate. Ovaj rezultat, kao i dinienica da predloZenipristup obuhvata variiacije i u direkmoj grani i u powatnoi grani multivarijabilnogsistema automatskog upravlianja daju posebnu praktid:nu snagu ovom pristupu.
Dobiieni rezultati ianedeni su u istom duhu kao i klasi&ra funkcija osetlji-vosti data u [53] . Zato se moZe smatrati da ovai pristup na izvestan nadin vodi kaprevazilaZeniu iua izmedu klasidne i sawemene teorije automatskog upravljania.Pri ovome je od posebnog znalaia dinienica da se osetljivost ulaznog i izlaznog sig-nala moZe izraziti u procentima.
INTEGRITETA $rs_rElt{$Ono $to karakteri$e sisteme sa iednim ulazorn i iednim izlazom ie da otkazi-
vanie izvr5nog organa ili senzora, tako da kontrolni signal postane iednak nuli,automatski znadi da 6e sistem nastaviti da radi bez powatne sprege. Prema tome,sistem 6e ostati stabilan posle otklanjania powatne sprege ukoliko ie sistem bezpowatne sprege bio stabilan. Medutim, u sludaju multivarijabilnih sistema auto-matskog upravliuia sinraciia ie potpuno drugadiia. Moguie ie da i pored toga 5toie sistem bez powatne sprege bio stabilan, sistwr sa powatnom spregom postanenestabilan owaraniern iedne ili vi5e grana u povratnoj sprezi. Kao iednostal'anprimer moie se posmatrati sistem bez povratne sprege koji je stabilan, i kojem ieprikliudena powatna sprega sa dve grane. Neka se priktiudivanjem prve granesistem destabihzaje, a prikljudivanjem druge grane stabilizuje, odnosno prvomgranom polovi sistema se porneraiu udesno u kornpleksnoj ravr.ri, a druga granaih rnada u Zelienu poziciiu. Jasno ie da se otvaranjem druge grErne sistem desta-bilizuje. Znalai problema integriteta multivarijabilnih sistema moZe se ilustrovatii slede6im prirnerom.
Primer 2.5 J .
Dat ie linearan vremenski nepromenliiv sistem drugog reda:
* (t) : Ax (r) + Bu (t)gde ie:
A_ (2.5.1)
Odgovarajuda prenosna ftrnkcija ovog sistenra
" : [ : : ]
data ie sa:
f i ilL-; - 6J
I: f . iL-T
-+
/t/
48
GG) (2.5.2)

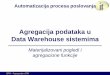
NIqUI.ToV KRFqg*SUl{ovaj kriterijum mo_he_generalizovati i za studai multivarijabilnih sistema (videtina primeru [4l7l, [4191' [427]). Generalizaciia Niquistovog laiterijuma stabilnostiza sludaj multivariiabilnih sistema, data u ovom odeljku , bazha se na rezultatimaprezen:iranim u l4l7l.
Posrnatra se multivariiabilni sistem automatskog upravljania sa jedinidnompovratnom spregom, diji ie strukturni blok-d.iiagram dat na slici 3.2.1. Sistem sa
r (s)
Sl. 3.2.1. Multivanijabilni sistem sa jedinidnorn powarnom spregom
1t _
slike 3.2.1 moZe se shvatiti kao kaskadni sistemi objekta upravli^t ia G (s)- "koji su redno vezani.upravlj ania i-r%ulatora
.-date sa:
G G) - Ce (s/- Ae)-t Be
koji se sastoji od regulatora /( (s)Neka su funkciie prenosa objekta
(3.2.r)
(3.2.2)
|,;l :f _; l (3.2.4)
respektivno.
Dobro je qoznato da ie stabilnost vrernenski nepromenljivih linearnih sis-tema konadnih dimerrziia odredena poloZaiem korena karakteristi&rog polinomasistema sa zat\rorenom powatnom spregom. Za sistenr. sa otvorenom powatnomspregom karakteristidni polinom definisan !e sa:
Cx (sI - Ad-r Bx
6 Crl : det (r/- eddet (sr - Ax) (3.2.3)
Model multivarijabilnog sistema sa otvorenom povratnorn spregom, u ovom .slu-!"i,t kaskadnog sistema, takode se mote prikazati i u polinoiinainoi matridrroiformi [420] kao:
BcCx i] - f
: '
sl - tTKi.. . .- . . . . .- . . . . . . . . .- . :0i
0Bx
Tz iednadine (3.2.3) iasno se uodava da je polinom 6 (9 iclentidan determinantieleS.ngnta (l,l) u polinominalnoi mauici sistema, je,Cnadina 12.2.4). Ovai zagjudakva1i i u- generalnom sludaju, te se on rnoZe primeniti i za <teiinisanie karakreiistie-nog polinoma multivarijabilnog sistema sa zaworenom povratnom spregom. pret9q3 u ciliu poiednostavlienia notacije, jednadina (3.2.4 moZe se predstaviti uobliku:
lsr-AexiBax l l . . . rsr . . . . l : [ . g l (3.2.s)L- a;';""
" i "o 't ' 'J
L r L-y Jgde indeks GK oznadava da ie red o matticama kaskadnog sistema.
5B

Koristeci ornr analogiiu polinominalna matridna forma sistema sa zaworenornpovratnqm spregom definisana ie sa:
ft/-Aex Bex 0. 0 I t- xer I f 0 Il -cex
0I o r r i r | | -y f
- l o | \ -
L6 o- i i oJLi JL-;JDrugim redima, karakteristidni polinom multivarijabilnog sistema sa zaworenornpovratnom spregom definisan ie determinantom elementa (lrl) matrice, date ujednadini (3.2.Q, ti.:
(3.2J)
Da bi se odredila ova determinanta, pou'ebno je da se uodi da vaLi slede6i iden-
o G) : der | :;!,i" "o'" -? ILO I IJ
titet:
[Crr-Aex)-L o ol [ ' / -AexlCex( ' r -Aex)-L I o l l -cexL o o r J L o
l- I G/- Aex)-r Bex oI O CexGl- Aex)-L Bex - ILo r r
Na ovai nadin wednost determinante O (r) definisana ie sa:
t- I (r/- Aex)-L BexO (0 : det GI- Aex) det
I o CexGl- Aex)-r BexLO I
_|:Bex0I
Il
(3.2.8)
-? I (32s)IJ
odnosno:
O (t) : det G/- Aex) det (f * C'ex(s/- Aex)-L Bex) Q.2.10)
<D (r) : O (s) det (/ + c (r) /< (s)) (3.2.rr)
[. pri ovorne, potrebno ie podrnrii nekoliko znadainih dinienica. Pre svega iednadina(3.2.11) predstavlja direktnu generaltzaciju dobro poznatog rezultata za sludajsistema sa iednim ulazom i iednim izlazom. Drugo, gornia relaciia izvedena iepri wlo op5tim uslovima. Naime, iedina pretpostavka koja ie pri ovorne bila udi-niena sastoji se u tome da se raspolaZe maternatidkim rnodelom obiekta upravljaniai regulatora, tj. kaskadnog sisterta, u prostoru stanja, a da pri tome nisu bile udi-niene nikalve pretpostavke u pogledu konuolabilnosti i opservabilnosti sistema.t l
l,'"'I Ovo je od pooebnog aataja, jer ie poznato da ukoliko uslovi kontrolabilnooti iopservabilnosti nisu zadovolieni, onda pri forrniraniu prenosnih funkcija G (r),K (t) i G (s) K (r) moZe da dode do eliminacije nekih polova i nula. Drugim re6irna,moZe da dode do eliminacije nekontrolabilnih/neopservabilnih modova ovih pre-nosnih funkcija. IJpravo, b ovog i sledi znatai gornieg prisnrpa, odnosno izradu-
59

navanie karakteristitnog polinoma sistema sa zatvorenom powatnom spregom uobliku (3.2.11). Pri ovoj prezentaciii karakteristidnog polinoma prvi deo izrazaostaie nepromenien, pa se time elimini5e mogudnost eliminacije nestabilnih ne-kontrolabilnih /neopservabilnih modova.
Imajuii u vidu da ie izraz (3.2.1 1) sarno generalizaciia poznatog izraza zasisteme sa jednirn ulazom i jednim izlazom jasno ie da se iedna6ina (3.2.1 l) nioiedirektno iskoristiti za formulisanje multivariiabilnog Niquistovog kriterijuma sta-bilnosti. Kao i u sludaiu sistema sa iednim ulazom i iednim izlazom izraz (3.2.1 l)moZe da posluZi za odredivanie broia korena ovog polinoma koii leZe u desnojpoluravni kompleksne ravni. Ovo se postiZe uvodenjern dobro poaulte ,rNiquistoveDn konture" koia obuhvata celu desnu poluravan (videti sliku 3.2.2.).
Sl. 3.2.2. Niquistova Da konnrra
Iz l(o5iieve (Cauchy) teoreme argumenat proizlazi da trkotiko je tD (s) ana-litidka funkcija duZ D n konture tada ie:
limN(O A (s), Dil : ER+co
(3.2.r2)
gde ie sa N (arf, C) oznaden broi obuhvatanja ta6ke d u pravcu kretanja skazalikedasovnika slikom konture C, dobiiene na osnovu preslikavania pomoiu funkcije/ G) ; .a z ie broj korena O (r) u desnoj poluravni- kornpleksne ravni.
Jasno je da se ieCnadina (3.2.12) moZe predstaviti i u oblikul
- iv!O, Oir), Drr) : rv iO, aet G/- Acx)(I + G (r)/< (s)), Dn) (:.2.13)- l / (0,det ( I + G(rK(r)) , Dd + p Q.2.r4)
- N(- I s- I + det (/ + G (r)/<(t)), Dd + I) (3.2.1s)gde ie p-broi nula karakteristidnog polinoma @ (s), u desnoj poluravni kompleksneravni.
Prema tome generalisani, rnultivarijabilni Niquestov kriterijum se moZe for-mulisati na slede6i nadin:
Turema 3.2.1. Multivarijabilni sistem automatskog upravlj u$a, prikazanna slici 3.2.1, asimptotski ie stabilan (u srnislu da @ (s) nema nula u desnoj polu-ravni kompleksne ravni) ako, i samo ako je za wako R dovoljno veliko:
N(0,det(r + G (s) /<(sLDn) - -pili ekvivale:rtno:
(3.2.16)
60
N(- l , - I + det( / + G (r)K(r)) , Dn) = -p (3.2.17)

gde Niquistova D n kontura data na slici 3.2.2. obuhvata sve nestabilne polovekarakteristidnog polinoma 6 (r), sistema sa oworenom powamom spregom , a pje broi nestabilnih polova polinoma O Crl.
ly:rakooY1teoremapredstavlja.c1ir.I*".generalizacijuskalarnogNiquirqurstovogkriteriiuma s.tabilnosti za sisteme sa iednim-ulazom i jednim izlazom, fu."Jdt;;d;prakt_idna p1i19y j.. vezarLa za znatajne te5kode. Pre svega, zavisnost determinantedet (/ J- G (s) /( (s
o da ie na bazi ove teoreme te5ko dodi doTo ie svakako Trazlog Za5to seciliu razvoja metoda za sintezu
posledniih goclinamultivariiabilnih
iu6 strukturedine velikiregulatora.
istraiivadkiO tome ie
napon ubiti vi5e
redi u slededim odeljcima.Treba imati u vidu, osim toga, da osnovno- preirnucswo kori5ienja Niquist-
ovog-kriteriiutna kod sistema sa jednim ulazom i jednim izlazom nije bilo u do-biianiu odgovora na pitanie da li ie sistem stabilan ili ne, ve6 da oiaj kriterijumdaie informaciie o granicarna stabilnosti sistema; na primer, u kojoi rneri mate-matidki model moZe da odstupa od stvarne prenosne frrnkcije objekta upravlianja,a da to ne rezultuie u nestabilnost sistema. Na Zalost, muliivariiabilni Nil,iirtbnkriterijum se ne moie koristiti u tom smislu. O tome ie biti vi5e re6i u Giavi 4.
Primenom sekvenciialne rnetode problem sintee multivarijabilnih sistema$efcomponuje se .ll lktp-skalarnih problema sinteze sistema sa ildnim ulazom iiednim izlazorn SuStina ov-e metode ie sledeca. Izabere se iedal par ulaza i izlazai iarr$i sinteza odgovaraiuieg skalarnog regulatora. Zatim se ova powarna granazawori i izabere slededi ulazno-izlazni-ptr-i izwsi sinteza regulatir", fti*Lo*neke od klasidnih rnetoda sinteze. Ovai postupak se ponavlia- dok r. tr. zatvoresve €frane u po\rtatnoj sprezi (videti sl. 3.3.1). U osnovi, ova metoda ie wlo iedno-
Sl. 3-3.1- Sinteza multivarijabilnih sistema sekvenciialnom metodom
:113" i predstavlia direktnu generalizaciju dobno poznatih klasi&rih metoda zasrntezu sistema sa iednim ulazom i jednim izlazomDa bi se precizniie obiasnile osnovne ideje ove metode, posmarra se multi-varijabilni sistem automatskog upravljania diii je blok-aiiagr-ani dat na slici 3.3.2.
5o-1 "ulryog pristupa tritirania piobld*. sinieze multivarijabilnih sistema logidno
'e usvoiiti da je matrica F u pbwatnoi grani diiagonalna magica, ti:
al
(3.3. I )
61
r r_r(s) Y1-1(s)
vi(e)
P-diag{f i r fzr . . . r f*}

Naravno, osnovno pitanie koie se pri ovome postavlia ie pitanie stabilnosti sisternau funkciji vrednosti dijagonalnih elemenata matrice F. Odgovor na ovo pitanjemoZe se dobiti primenom multivariiabilnog Niquistovog kriterijuma. Prirodno
F=diag(f l r f 2r . . . , fm)
SI. 3.3.2. Multivarijabilni sistem sa dijagonalnim regulatorom F
ie da se pri ovome nastoji da se problem stabilnosti sistema dekomJorrui. u skupiednostavnijih potproblerna, svaki vezaiu- za pojedinadno fi, i - l, 2, . . . , m. Uliteraturi l42ll-[4241, [4151, [416] (videti takode [401], 1407J, [4t71, [418]) datie predlogza o\ru dekompoziciju. fzvodenje koje sledi zasnovano ie na referenoi [alQ.
Neka je matrica Fi definisana kao:
Fl - diag Uufz . . . tftt 0, . . . r 0) (3.3.2)
odnosno F; odgovara onom regulatoru koji se dobija kada se grane f * l,; + 2, . . . t t7r u po. watnoi sprezi otvore. Funkcija spregButog prenosa sistema,kada su pnre i - 1 grane zafrorene, data ie sa:
.F/r G) :{o (s) K(r) (/ * Fr-' G (r) rK(s))-t (3.3.3)
Onda se funkcija spregnutog prenosa izmedu e-tog ulaza i e'-tog izlaza, kada sugrane 1r2r.. . , i - l zaworene, sa pojadanjem fufzr.. . , f*t , a ostale grane suoworene, mo1e definisati kao:
hc $) : Itn (s)
matrice .F/c (s).
(3.3.4)
gde ie ht G), (r; +ti element
Sada se moie forrnulisati slede6a teorema.
Teorenta 3.3 "'I .
det (r + FG(s) K (r)) : ft Ct * ftlzi (s)) (3.3.5)i : t
gde su .fr i lry(s) definisani sa (3.3.1) i (3.3.4), respektivno.
Dokaz:
Dokaz teorerne se daiesekvencijalne metode.
Neka je matrica F, definisana
62
ier ie jednostavan i vodi ka
sa: '
Ft : Fc- Fr-t
boliem razumevaniu
(3.3.6)

t i . :Fr : diag {0, . . . ,0, ftror. . . , o} (3.3.7 )
Sada se moZe uspostaviti slededi identitet:
FtG (r) /<(s) ( / * Fr-r GG)K(s))- t ( / + F*, c(r)K(s)) :Ft c( ' ) /<(r) (3.3.8)
Jednadina (3.3.8) se moZe napisati i u slededem obliku:
(/ + FtG (s) KG)) (/ * Fc-r G (') K (s))-t (I 1' Fr-'c G) K (s)) :
- I *FrcG)/<G) (3.3.e)
Jasno ie da ie (i, e)-ti element matriceFt //d G) iednak (r, f)-tom elemenru marriceft I{i $), koji ie dat sa ft h G). Po5to su svi redovi matrice & Ht. iednaki nuli,izrvev r'-tog reda, onda iz iednadine (3.3.9) sledi da je:
(1 {- f thrG)l I + Fe-rc( ' )KG)l : l / * &G(') /<G)lKako, ie:
to znafii da ie:
(3.3.10)
(3.3.1 1)
(3.3 .t2)
primenil /+ FrGG),<G)l : ( r * f ih i
Prema tome, jednadina (3.3.5) dobija se iz iednadine (3.3.10) kada se onaza i - l , 2r . . . ,m.
Teorema 3.3.1. pre svega ukazuje na dinjenicu da se ispitivanje stabilnostimultivariiabilnih sistema automatskog upravljania sa zatvorenom powatnom spre-gom mole iz'rr5iti ispitivanjern stabilnosti sistema kada se grane u powarnoj sprezizawaraiu iedna za drugom, ti. da se multivariiabilni Niquistov kr!.teriiutn mohedekomponovati na skup skalarnih Niquistovih kriterijuma. I(ada je i;ta granazaworena, onda se analiza svodi na ispitivanie stabilnosti sistema sa jednim ulazomi iednim izlazom sa finkciiom spregnutog prenosa 14 (s), odnosno efekt zawaraniar-te grane moZe se ispitati preko skalarne powatne firnkciie I + fi h G). Tako,na primer, ukoliko iep broi nestabilnih polova multivarijabilnog $istema bez powatnesprege, tada ukupni broi obutn'atania tadke (- l, O), kada se zawore sve gralleu powatnoi sprezi, iedna z.a drugom, treba da bud-e p.
1 Potrebno je podvu6i da. kod izvbdenia sekvenciialne metode nisu bile udi-niene'irikakve aproksimacije, ti. pretpostavke o Strukturi obiekta upravliaria. Od-nosno, teorema 3..3.1 daie iednu generaltu, egzaktnu metodu za atalizu stabilnostimultivarijabilnih sistema autornatskog upravlianj i, bez ikakvog znatainog ograni-denia u pogledu stnrkture sistura. To ie svakako jedno veliko preimudswo (uodnosu na slidne posttrpke koii se baziraiu na rdznim aproksimacijama i ograni-deniima na stnrkturi sistema, i koji 6e biti tretirani u slededim odeljcima), ali uisto werne ovirn se uvode i neka nataina praktidna ogranidenia.
Pre svega, potrebno ie primetiti da ie u op$tem sludaju h G) sasvim razliditood (G (r) K (s))cr. Takode, lu G) ie razlidito i od prenosne funkcije izmedu r-togulaza i e+og iz. laza sistemakada su grane l r2r .o. , i - l r ;+ l r . . .etnz upov-ratnoj sprezi zatvorene. Drugim retirna, firnkciia spregnutog prenosa iznredu i-togalaza i r'-tog tzlaza sistema ie sloZena funkciia poiadania u preostalim granarna pov-ratne sprege. To vodi ka slede€em zaklju6ku: ukoliko na osnovu fiziekih osobinasistenra ne postoii neka indikaciia o nadinu izbon parova ulaza i izlaz.a, u op5temsludaiu ie nemogude odrediti takvu funkciiu pojaEania ft u e'-toj grani koia 6e bitiprihvatljiva za nzlidite wednosti poja6ania u ostalim granama. Ova te5koda iasnotrkazuje na osnovni problem izbon takvog poiadania fi koiim bi se obezbedileprihvadiive granice stabilnosti multivariiabilnog sistema.
63

Na Zalost, predloZena sekvenciialna metocla ne daje nikakva uputstya upogledu nadina izbora parova ulaza i izlaza, tj. koji izlazni signal treba da budedoveden do datog ulaza. Za dva razlidita izbora parova ulaza i iilaza mogu se dobitirazlititi., P8 i sasvim suprotni zakliutci. 7,nadi, nakon zatvaranja ,-t. giurle u po\,-ratnoi sprezi ne moZe se ni$ta konkretniie redi o pona5anju sistema kaia i preostalei 1- l, . . . t frt grane budu zatvorene.
Jasno je da izneta ogranidenia nemaju nikakav znatai za iedan poseban slu-dai koii ima i odredeni, ali ogranideni praktidrri znataj, a ro je sludaj'izbora poja-d-anja u e'-toi grani flkada su pojadania u ostalirn gran"m" fiksna i poznata. U op5tenrsludaju moZe se odekivati d-a ie sekvenciialna metoda dati dobre rezultate ukolikoie na bazi fizidkih osobina obiekta_upravljanja moguie od,rediti redosl ed. zatvaranjagrana u povratnoi sprezi. Ove informacije mogu se clobiti kod onih multiva riia-bilnih sistema automatsl<og upravlia"il
-ko_d koiih su grane u povratnoj sprezi,rslabo" povezane ili ukoliko su one ,rsiroko razdvoj.rr-." u datom opsegu ude-stanosti.
Konadno, potrebno ie podvuii da je analiza u ovom odeljku bila ogranidenary izpgr-pojadaniaft, i: lr2, m, odnosno matrice F. Analiza o izboru mar-rice /<(r).rnoie se-na6i u referenca$ra [407], l42sl, t4z6l.
u_P_RAVIJANJAlir\\#.
Ved od. samog nastanka klasidnih metoda za sintezu sistema automatskoguplavtjania bio ie uoden i {ihov o$rovni nedostatak, (videu, npr. [53]), tj. da lZniihova P4mTa- uk ograniEena samo na sisteme sa iednim uiaz; f t; dnim iz-lazom- Od tada ie bilo i vi5e pohr5aia za prevazilalenie ovog nedostatk". pri tome!-.- ot}9vni. problem bio u tinienici da ie finkciia prenosu o!;ekta upravljania ob-l ika- (3.4.1), pri 9*r ie.u op$tem sludaju Ca'@ * 0, i , j : 1,2,:.., '*. '7unoie da u ovom sludaju, ti;:
- - '-'-' J
c1 (s)
G-, (s)
Gr (s) .
G(s):
Cr1(s)-* A,.; + i, delovanie signala u r'-tom ulazrrom kdnalu, tj. q(t) * 0,yi @ :. 0, i,+ el u principu dovodi do pojave signala u svim :r;laznim t*"fi*.,t!..yt@ tO' i:1,2r...,m (vide{ sl iku 3.4.1). Postojanje ovog interaktivnogdeiswa iedna ie od osnovn4 p*preka n? putu ganenlizaciie met6da zasinrezu,razviienih kod sistema sa iednim ulazom i fednim izlazon.. dvakako, naiieanosrav-niii nadin da se ovai problem prevazide ie da se zanernari uticaj .f.*."i"
-iwartglavne diiagoTle- Ideia i-. ytl" jednostavna, ati u op5tem sludaiu
"rptift"tfjiva.To se moZe ilwtrovati slededim primerom:
Pritner 3.4.1 .
Neka ie dat linearni wemenski nepromenliiv sisteln drtrgog reda:
Gmz(s):
o':1G**$LI
(3.4.r)
(3.4.2)
(3.4,3)
* (t) : Ax(r) + Bu (t)
v (t) : Cr (t)
64

gdesu:
Lako se rnoZe pokazati da je prenosna funkcija ovog sistema data sa:
G (')
A:[: -?] ":[? l]
":l? :l
_ f'-i. +lL,+ +J
Is:I
(3.4.4)
(3.4.5)
- Ukoliko se.zanernari uticaj vandijagonalnih elernen ata Zls i 2lsregulatora moie izwiiti na osnovu prenosne funkcije:
(3.4.6)
*'1, tada se sinteza'-
Ga (s)
Primenom regulatora oblika:
+10
K(,) : [; l]
I (3.4.7\
(3.4.8)
rI
. ,2
-Jr-- ri
"t
YirYn
^.4^-
Y1 1-Y2 r-
Sl. 3.4.1. Meduzavisnost ulaznih i izlaznih signala
obezbeduie se stabilnost aprbksimativnog sistema sa iedinidnom powarnom spre-gom. Medutim, kada se regulator I( (s) primeni na originalni sistem, gde vandiia-gonalni elementi u prenosnoj funkciji G (r) nisu zanemareni, tada je sistem saiedinidnom povratnom spregom nestabilan. Drugim refima, u opStem sludajuYandijagonalni elementi Gu (s), i + i se ne mogu zanemariti, ier oni mogu daimaiu snaZan uticai na stabilnost sistema, kao i na ostale performanse multivarija-bilnog sistema automatskog upravlianja.
U literaturi je predtoZeno vi5e metoda za sinteztr multivarijabilnih sistemaautomatskog upravliuri" koie imaiu iednu zajednidlu karakteristiku, a to ie reduk-ciia problema na skup iednostavniiih prob'lerha vezanih za sintezu odgovarajudihsistema. sa je{nim ulazom i iednim .izlazom, a Sq se pri tome vandijagonalni ele-menti u prenosnoj funkciii objekta upravljaoia ne zanemare. Nairaniji predlog u
Sistenn sazatvorenompovre tnom
--spreEpm - _
5 Savremene metode 66

ovom smislu dat ie u referenci [410]4), i on se obidno naziva metoda neinteraktivnog upravljanja.
Primer 3.4.1 ukazuie na dinjenicu da se u postupku sinteze regulatora, vandijagonalni elementi Gu (r), , * i, prenosne funkciie objekta upravljanja ne mogrdirektno zanemariti, ier tako dobiven regulator moZe da vodi ka nestabilnoslmultivarijabilnog sistema sa powatnom spregom. U principu, ovai problem grmoZe prevazili primenom neinteraktivnog regulatora, odnosno regulatora diirprenosnu funkciiu treba tako izabrati da funkcija povratnog prenosa:
bude dijagonalna, ti.:
Sa teorijskog aspekta to se lako moZe postidi prenosnom funkciiom regulator:/< (s) oblika:
/< (s) : q-l (s) diag {frr (s), Az (s), (3.4. r l )
Naravno, pod uslovom da ie prenosna funkciia obiekta upravljanja invertabilnamatrica, tj. det (G (s)) + O.
Sada se sinteza regulatora, ti. izbor &r (s)r-&z (s), . . . , k*(s) vr5i za svakugranu posebno, primenom neke od metoda predl-oienih za sinteztr sistema auto-maekog upravliania sa iednim ulazom i iednim izlazom. Blok-dijagram sistemaautomatskog upravlianja sa regulatorom oblika (3.4.11) dat ie na slici 3.4.2.
I pored toga Sto u ovom pristupu nerna zrtatainih teoriiskih pote5koia, saprakti&tog aspekta on ie obi€no neprihvatliiv, i to iz naimanje dva razloga:
i) pre svege, K(s) obidno ima jako sloZenu dinamidku strukturu, ier ele-menti matrice G (s)-t ulaze u struknui regulatora. Naime, ve6a slo-Zenost obiekta upravljania direkmo utide na vecu sloZenost regulatora.To je isuvi5e visoka cena da bi se samo eliminisao uticaj vandiiagonalnihelemenata Gu G), ; + i;
ii) mo1e se lako dogoditi da K G) bude nestabilan sistem. Prema tome,mor4 se strogo voditi raduna da G (s) ne bude funkcija neminimalne faze.
u(di y(e)
Sl. 3.4.2. Multivariiabilni sistem sa neinteraktivnim regulatorom
S aspekta praktidne primene, ovo Su wlo stroga ogranidenia tako da ie prak-ti6ni aur*aj neinteraktivnog regulatora rnlo ogranideo. IJ slededa dva odeljka ukratkoCe biti ra-rnatrana dva nova prisnrpa. Oni u su5tini nastoje da K (s) bude dalekoiednostarmiie strtrkttrre, po mogudoosti da bude konstantna matrica, i da se re-dukcija interaktivnog deiswa ne ianli potpuno, veC do stepena koii io$ uvek pnatamogu6nosti za kori5denie klasidnih metoda za sintezu sistema automatskog uprav-liania sa iednim ulazom i iednim ihlazorn;
r; Vidcti takode l4Tl-t4491. Analiza ovog problema u prostoru staoia data ie u radovirnal44sl, 14461, [4s0]-[46U.
66
LY (t) - G (s) r< (s)
W (t) - diag {a,t (s), asz (s),. . . , w* (s)}
(3.4.9.
(3.4. to)

3.5. DTJAGONALNO DOMINANTNI STSTEMT
Da bi se iednostavniie shvatile osnovne ideje vezane za metode dijagonalnoclominantnih sistema, naipre ie biti data definicija dijagonalno dominantne pre-nosne funkciie.
Definicija 3.5.1. Neka ie data racionalna prenosna funkciia F G) dimen-ziie rtt x fti'
F(s) (3.5.1)
i neka ie sa C oznatena kontura u kompleksnoi s-ravni. Tada se za prenosnu funk--ciju F (s), kaie da ie diiagonalno dominantna na konturi C ukoliko ie zadovolien
iedan (ili oba) od ovih uslova:
r)
u)
, lfnG)l >.>. l/a G)l za svako s e Ct.: I
i*;
,n
l"fic (t) li : li+;
Grubo govore6i, moZe se re6i da ie prenosna funkciia F (s) diiagonalno dominantnaukoliko su diiagonalni elesrenti mnogo ve6i od vandiiagonalnih elemenata.
I-ako se moZe pokazati da ukoliko ie racionalna firnkciia F (s) dijagonalnodominantna na zaworenoi konturi C tada va1i:
m
N (0, det F (r), C)i : l
(3.5.4)
Odnosno, da je broi obglrvatania tadke 0 od strane det F (s)-iednaleabiru'obuhva-tania ta[ke 0 od strane svakog dilagonalnog elementafu(s), f - 1, 2r. . .27rt7 ftmk-eiie F-(s).
Na osno\nr iznete analize iasno ie da se kori56eniem osobine <iiiagonalnodominantnih prenosnih funkcija rnoZe poiednostaviti multivariiabilni Niquistovkriteriium. Neka ie multivariiabilni sistem automatskog upravlinia dat blok-diia-gtamom kao na slici 3.2.L Na osno\ru multivariiabilnog Niquistovog kriteriiumaproulazi da ie sistem automatskog upravliania sa slike 3.2.L stabilan, ukoliko ie:
limN (Q det (/ + G (s) K (s)), Dn) - - P (3.5.5)R +co
gde je D3 Niquistova kontura, a p broj nestabilnih polova funkciie powatnog prenosa (videti odeliak 3.2.).
Pod uslovom da ie i / + G (s) K (r) diiagonalno dominantna funkciia, rrslovstabilnosti (3.5.t se moie pojednostaviti-.i prikazati u obliku:
$,* N(q t + (cG)K(s))a,Dn) - -pj'- t f,-r o
(3.s.2)
(3.5.3)
(3.5.O
675.

Ukoliko se udini io3 jedna pretpostavka da su K (s), a takode i G G) diiagonalnodominantni, tada uslov stabilnosti (3. 5.6) postaie :
j : l R-rco
Znatai ovog pojednostavlienia ne ogleda se samo u dobiianju jednostavniieg resraz^ ispitivanie stabilnosti multivariiabilnih sistema automatskog upravliania veci u dinienici da on pnrta dobru osno\ru za pojednostavljenje problema sinteze.Naime, ovim pristupom sinteza multivariiabilnih sistema automatskog upravlianjamote se sVesti na seriiu skalarnih problema, za svaku granu u powatnoj spreziposebno, a da se pri tome koristi neka od metoda razviienih za sintezu sistemaautomatskog uprardianja sa iednim ulazom i jednirn ulazom. Jasno je da se naovai nadin pored stabilnosti sistema mogu ispuniti i drtrgi zahtevi u pogledu per-formansi sistema. Na primer, s aspekta robustnosti (r'ideti Glarru 4) mote se ode-kivati da se robustnost sistema mo?e obezbediti ukoliko ie pri sintezi regulatoraza svaku poiedinadnu granu obezbeden odredeni stepen stabilnosti, i ukoliko jei perturbovani sistem ostao diiagonalno dorninantan.' a
Je&a od osnowrih pretpostavki pri gornjoi analizi, je bila dijagonalga domi-nantnost multirtariiabilnog sistema. Prema tome, provera diiagonalne dominanmostis'istema posebno je znatajna. U praksi ie posebno auaktivai grafiEki test dijago-'nalne dominantnosti, Ne -ulaze6i u dealier-.ovaj test se moZe opisati na. slededinadin.
Neka ie F (s) racionalna matrid:na firnkcija, i neka je zaworena Dn konturapreslikana u krivoi /ae pomo&r funkciia fu(s), i:1,2,...,m (videti sl. 3.5.1).
Sl. 3.5.1. Cilafitki kriteriium diiagondne dominanurosti
Svakoi tadki s na konturi Dn odgovara tadka /cc (s) na krivoi h6 Tadka /rc (s) semote iskoristiti kao centar kruga eiii ie poluprednik:
d6 (s) : n, (t)l re D4..
(3.5.8)
(3.s.7)
J:_
i - li*s
ai.
ul:,n
:i - li*i
6R
&c G) lfr@l s e Dp (3.5.9)

Jasno ie da crtanie ovih krugovaza svako f, J e Dn ima smisla ukoliko se radi po-moCu radunara. tlostalom, to ie i osnovna pretpostavka kod kori5denja grafidkogtesta za analizu diiagonalne dominantnosti. Ukoliko ovaj skup krugova ne obuhvatakoordinatni podetak za svako ;, ; - 1r2r...rffi, tada se kaie da ie racionalnanratridna funkciia F (r) diiagonalno dominantna. Ovaj zakliudak d.irektno sledii iz jednadina (3.5.2) i (3.5.3), ier ukoliko koordinatni podetak niie obuhva6en,to znati da ie:
l/,r G)l l/u G)l (3.5. l0)
odnosno:
lr;c (')l lfi,. G)l
m
i : li+;
m
i: Ii+;
(3.5. r I )
a to ie i bio uslov diiagonalne dominantnosti.
=: 'Ono Sto ie znataino s aspekta prim*rliiyorti metode d.iiagonalne dominantnosti
,it ie u tome da mnogi realni sistemi, ti. funkciie prenosa G (s) objekta upravljanja nev zadovoljavaju uslov dijagonalne dominaotnosti. U tim sludaievima primenliivost
iznetih rezultata u velikoj meri zavisi od izbora firnkciie prenosa +egulatora /( (r),koji treba da obezbeCi da funkciia powatnog prenosa W (t) bude diiagonalno do-minantna. Kako ie bilo pokazano u odeliku 3.4, egzistenciia ovakvog regulatoraje garantovana invertabilno56u prsrosne funkoiie G (s). Medutim, bilo ie takodeukazano na to da u mnogim praktidnim situaciiama ovai prisnrp ne daie Zeljenerezultate, i d.a je s aspekta praktiEne primene potrebno odrediti takvo I( (s) koiese rnoZe iectnostavno realizovati.
Moguii praktidni pristup prevazilaZenie ovog problema bio bi da se funkcijaprenosa regulatora izabere u obliku:
/< (s) - kKc (s) diag {frr (s), Az (s), . . . '
er" G)} (3.5.12)
gde ie k skalar'. /(" (s) ie funkciia prenosa ulaztrog kompenzatora izabranog takoda G (s) K, (s) ima heliene osobine u pogledu diiagonalne dominantnosti, a mat.rica diag {&r (s), &z (s), . . . ;b* (s)} trebr da -obezbedi Zeliene- perfornransE sis-terna autoinatskog upravliania sa zaworenom powatnom spregom. Prema tome,izbor regUlatora ̂ K (s) mohe Se realizovati u ei koraka.-'-- --
Korak 1. K, (s) treb a izabrati da ima Sto iednostavniju struktuu (da sadrZiiednostavne dinamidke elemente), po mogu6nosti da bude konstantna matrica,tako da:
W (t) - Q (s) K6 (s) (3.5.13)
bud,e zadovoliavaiu6e diiagonalno dominantna u opsegu udestanosti od interesa.
Korak 2. Elementi fu (s), i : lr2, . . . ,m treba da obezbede da (W (s))a &r (s)i : lr2r. . . ,ffi imaiu prihvadiive frekventne karakteristike (npr., pretek faze,pretek poiadania itd.).
Korak 3. Izborom pogodne rrrednosti skalara ft iz\n$iti kona&ru realizacijutelienih performansi sistema automatskog upravliania sa zaworenom powatnomspregom.
Potrebno ie primetiti da i kod ovog pristupa kliudni problem, izbor rnatriceK" (s) tako da G (s) Kr (s) postane dijagonalno dorninantna matrioa, ostaje i dalieoworen. Ozbilinost ovog problema dolazi do tnataia ved za m ) 2.
69

i trkoliko se ne zahteva dista diiagonalizacija sistema, ved samo ,,aproksimativna"diiagonalna dominantnost. Jasno ie da se 6ista diiagonalizaciia matrice mote posti(iprimenom posnrpka singularne dekompoziciie (videti Odeliak 3.6), koii se destoiraziva i postupkom ,rkarakteristidnih korena". Medutim, koriSienje metode zapostizanie egzaktne diiagonalizaciie moZe da rer.rltuie praktidno neprihvatljivimieSeniim". Naime, u tom sludaiu moZe se dogoditi da matrice Z(r) i V(s), kojese iavljaiu kao komponente regulatora, budu iraoionalne funkcije koie se ne mogupraktidno realizovati.-
Tada se ove funkcije moraju aproksimirati linearnim sistemima konadnihdirnenziia.
Na Zalost, ozbilina ogranidenia koia proistidu iz potrebe za odredivanjemi praktidne realizaciie matrica Z (r) i V (s) nisu i jedine slabosti vezarLe za kori5-ienje metode diiagonalno dominantnih sistema za sintezu multivariiabilnih sis-rema automatskog upravliania. Pored prezentiranih ogranidenja, pri praktidnoiprirneni ove metode iavliaiu se i daleko ozbiljniji problemi. Da bi se ukazalo naneke od niih, bi6e kori5ien karakteristidni polinom sistema sa zatvorenom po\nat-nom spregom:
(3.5. I 7)
dobiven u odeliku 3.2. Pod pretpostavkom diiagonalne dominantnosti sistema po-linorn (3.5.17) se moZe poiednostaviti i predstaviti u obliku :
o-on(r *GuG)frc(s))i - l
Jasoo ie da su perforrnanse multivariiabilnog sistema automatskog upravljaniadirekno v@Ire za fbktore (l * Gc (s) lr (s)), i
- 1,2,. . - ,rr2, pri Cemu svaki
poseboo predstavlja povramu uporednu fuokciiu odgo\xarajuCeg sisterna sa jednimulazom i iednim izlaznm. S aspekta skalarnog sisteoa, odgovaraju& powamauporedoa funkcija treba da ima ,gralu" rnedrrost rul opsegu utestanosti gde iecneqgiia lurrrova mereoia I (s) velika i da ima velilcu vrednost na opsegu udesa-nocti gde ie encrgiia refereotnog utaza r (s) i spolinih poremeCaja d (s) velika. Ta-kotle, pornataa upoedna finkciia trcba da obezbedi i dobre osobine sistesna saspeka robrutnosti, usled pernnbacija u matrioi Gei G) (videti Glavu 4.).
Orla analiza ved ukazuje aa osnovni, Ibndamentalni nedosatak metode diia-gonalno dominaotnih sisteura. S aspekta multivariiabilnog sistema, odgovatajuCa
--Tor/ratna uporedna fio*cija / + C G)J<_(+ 1 ne nieoa_determinaota, mora da ''i."a odredene kamkteristike da .bi se ispunili zadati zahtevi sinteze. U Glavi 4.bi6e pokazaao da+am*deterninanta matrice ne daie dwoljno informaciia o oso-binama matrice. Dlugim reEima, i pored toga 3to deterrninante (3.5.18) mogu daimaju prihvatljive vrednosti, performanse rezultuiudeg multlvariiabilnog sisternamogu da budu sasvim neprihvadjive. Prims 4.5.1 dat u Glavi 4. jasniie ukazuje
/ oa ovaj nedostatak.L/-
O-Oaett /+c(s)/<(r) l
(3.s. I8)

3.5.3. Proporcionalno-integralni regulator sa kornpletnopovratnom spregom
U sludaji proporcionalno-integralnog regulatora sa kompletnom povratnomspregorn zakon upravljania se moZe predstaviti u obliku:
u (r) - Mx (r) (3.s.6)*uo
gde je izlazni vektor yz (t) definisan jednaEinom (3.5.2), pri demu ie matrica Ddata sa:
(3.s.7)
Ir4arice .Di, i-- lr2;. ..22 definisane su jednadinom (3.5.5):' r--
Jasno je da zakon upravliania (3.5.Q ne zahteva informaciie o vektoru ulaz-nih porerriecaia. S druge stiane, primenOm regUlatota (*5.6) elimini$e se :uticai -nemerljivih konstantnih ili sporo promenliivih poremedaia na :r,laani vektor yz (t),U literaturi ie ponudeno vi5e metoda za projektovanie proporcionalno-integralnil.tregulatora sa kompletnom powatnom spregom, koii obezbeduitr ,padovoliavaiude"pona5anie sistema sa zaworenom povratnom spregom.
Nara'rno, preciznija definiciia Sta znadi ,rzadovoljavaiuie" pona5anje zavisiod konkretne rcaluaciie, odnosno primene. Jedan mogu6i kriteriium bi bio dapolovi sistema sa zaworenom povratnom spregom zauzimaiu unapred zadate po-loiaieu levoj polovini kompleksne ravni. (J tom cilju moile biti primenieno nekolikometoda za postavljanie polova U9U, [193J, [200J, [2011, [203].
IrnajuCi u vidu artzlint u Glavi 5, u prvom delu ove kniige, iasno je da secelovitiie re.Ienie problema sinteze multivariiabilnih sistema moZe postidi mini-mizacijom kvadratnog indeksa performansi. U sludaiu proporcionalno-integralnihregulatora to se moZe posti6i na dva na6ina: primenom diiektne ll,92l, [200],odnosno indirelcne metode [88J, [89J, [370J.
{.f ovom odeliku detaliniie ie posmatran postupak sinteze proporcionalno--integralnog regulatora minimizaciiom 'kvadratnog. indeksa performansi. Usled
f+N I y 'Q)dr
Jt9
p-fl
187

postojarrja integralnog dlana u zakonu upravliania (3.5.6), dimenzija sisrerna sepoveiavaza Q,Pti demu se dodarni vektor siani a z,dimenzij'i q,mo;e definisati kao:
(3.5. 8)tg
Koristeii ovako definisan dodatni vektor stania, a irnajuii u vidu da je red o kon-stantnom poreme6aiu ar, sistem (3.5.1) moZe se formalno pro5iriti i napisari u obliku:
t (t : Ai (r) + E'a 14, r (ro) - io
A=lA ol , B- fBlLD oJ LoJ
gde ie:(3.5.e)
(3. s. I 0)
(3.s.1 l )
l.
j : | 6rQi+; ; rR1.)dlJtg
!e$t9r uprav.li*iy u (r) odreduje se iz uslova d,a se sistem krece po trajektoriiidtlz koie slede6i kvadratni indeks performansi poprima optimalnu vrednosr:
(3. s. l2)
gde ie matrica Q:
Q: Qt}O, Qr>0 (3.5. I 3)
nenegativno definitna matrica, a R ie pozitivno definitna matrica.Ukoliko ir -pT
(A:[) kompletno kontrolabilan [19U, tada postoji jedinswenooptimalno re5enie [l I IJ:
u(t) : -Fi( t ) , F-R-rErX
gde ie .I( simerridno, pozitivno definitno resenie iednadine:
KA+ArK-K3r\- tErrc+Q-0
Ako se matrica .K predstavi u obliku:
(3.s.14)
(3.5. I 5)
/(: tf; KrlK,,J (3.5. 16)
tada se upravljanie (3.5.6) moZe izrazi:d kao:t
u (t): - R-l Br Kt x (t)- R-l Br Ktz D | * G) dt * urJ
l6
gde
188
[r' ;J'
ie th : - R-l BT Ktz zs,
(3.5.17)

Imajudi ujednadina
vidu da se matrica K moie predstaviti(3.5.1 5) moZe se napisati u razvijenom
/(u BR-L BT Krr - Qt - (AT Kn
-(KtrA+KtzD):
u obliku (3.5.! 6), Riccatijevaobliku:
+ Dr Kr:r.) -
0 (3.5.18)
/(u BR-t Br /(r, - (Ar l(rz J- DT Kzz) : 0
KTT.BR-I Br Krz - ez: s
Kretanje optimalnog sistema moZe se sada opisati jednadinom:
(3.s. l e)
(3.5.20)
t;81i lako se moZe pokazati' { Ig2l da se uvodenjem integralnog dejswa etimini5e sta-tidka' gre5ka vektora izlaza yz (t).
Dobijeni rezultat u vezi s eliminacijom statidke gre5ke vektora izlaza yz (c)vabi bez obzira na to da li ie u postupku sinteze proporcionalno-integralnog re-gulatora sa kompletnom powatnorn spregom kori$6ena metoda linearnog kvadrat-nog regulatora ili metoda postavlianja polova. Ddje, treba napomenuti da je uodeliku 3.2 ukazano na to da prvi postupak za sintezu decentralizovanih regula-tora nije zavisio od toga na koii ie nadin izvr5ena sintea regvlatora sa komplet-nom povratnom spregom. Prema tome, u daliem tekstu bi6e pretpostavlieno dase proporcionalno-integralni regulator moZe predstaviti u obliku:
i ( t ) - FE(t) (3.5.22)
gde ie rnatrica F odredena bilo metodom linearnog hrradratnog regulatora bilometodom postavlianja polova, a vektor stanja E (t) ie definisan jednaEinom (3.5.11).{.J tom sludaiu kretanje sistema sa zawgrenogl povratnom spregom dato ie sle-decom dife*nciialnoni iednaEinorii :
i ( t ) : (A+EniG) (3.5.23)
Kako ie vec redeno u odeljku 3.d"ideja prvog pristupa za sintezu sistema sa dwen-ualizovanom informacionom i upravliadkorn stnrkturom bazira se na aproksima-ciji centralizovanog upravliania (3.5.22). U sledeca dva odeljka detdiniie se raz-matraju dve metode za aproksimaciiu centralizovanog upravljanja. Medutim, pretoga neophodno ie dati pouebne i dovoljne uslove za konuolabilnost i opserva-bilnost proSirenog sistema (3.5.9), ier, kako ie poznato, ove dve osobine sistemaod posebne su vaZnosti prilikom sinteze regulatora.
Dobro ie poznato da oba prisnrpa, metoda linearnog kvadratnog regulatorai metoda postavliania polova, zatrtevalu da pro5ireni sisiem (3.5.9) Uude kom-pletno kontrolabilan. Slede6i rezultat daje potrebne i dovoljne uslove za kontrola-bilnost para (4,-B).
TeoTsm4 3.5.1 . ProSireni sistem (3.5.9) ie kompletno kontrolabilan ako,i samo ako:
I) matrica lBrABr. . ., An-L Bl ie rarLga ni
lg matrica li 81 '
Lo ;J ie ransa n ! q.
: l - A B I f ' ( ' ) l+l.- n-t Br (Kn A * Kz D) - R-1 Br Kn BJ L" (OJ
I
, [ s IF
L_ ^-,
,, o, "J
a'(t) (3.s.2r)
189

Dobiieni rezultat ukazuje na dinjenicu da broj integratora mora da bucle manjii l i jednak broju ulaza, ri. Q {m.
Uslov opservabilnosti 'se' takode mote izraziti na jednostavan nacin.
Teorema 3 .5 .2 . Pro5ireni sistem (3.5.9) ie konr,pletno opservabilan ukoliko-
TTr : Qt, i ukoliko ie Rang Q, : q, odnosno e, > 0.
Drugim redima, teorema 3.5.2. ukazuje na dinjenicu da sve koordinate vek-lora stania _tgi: :. integriraiu moraju biti opservabilne kroz kvadratni indeks per-formansi (3.5.12).
Dokazi teorema 3.5.1 i 3.5.2. izostavlieni su zbog svoie iednostawrosti.