Embed Size (px)
Citation preview
1
Bežične senzorske mreže
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
Vanr.Prof Dr. Lejla Banjanović-Mehmedović
Bežične senzorske mreže Senzorska mreža (eng. Sensor Network‐ SNet) je distribuirani
sistem (DSis) kojeg čini polje senzora različitog tipa medjusobno povezanih komunikacionom mrežom.
Podaci sa izlaza senzora su djeljivi, a dovode se na ulaz DSis‐a radi njihove procjene (estimacije). Zadatak DSis‐a je da na osnovu dostupnih podataka sa senzora izdvoji najvjerovatnijuinformaciju o fenomenu koji se nadgleda.
SNet se formira od individualnihmultifunkcionalnihsenzorskih čvorova (eng. Sensor Nod‐ SNod).
U najvećem broju slučajeva SNod‐ovi se bežičnim putempovezuju u komunikacionu mrežu formirajući na taj načinbežičnu senzorskumrežu (eng. Wireless Sensor Network‐WSN).
WSN se sastoji od baterijsko napajanih modula koji su u suštiniSNod‐ovi.
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
2
Bežične senzorske mreže
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
Bežične senzorske mreže Bežična senzorska mreža
(WSN) je bežična mrežakoja se sastoji od prostornodistribuiranih autonomnihuređaja koji koriste senzoreza nadzor fizičkih iliokolišnih uslova, kao što su temperatura, zvuk, pritisak, pokreti ili zagađivači, na različitim mjestima.
U odnosu na standardnežičane, bežične mrežepružaju mobilnost kojom se omogućava kretanjekorisnika unutar mreže.
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
3
Mreža senzora omogućava
prikupljanje podataka u realnomvremenu,
skladištenje informacija i
dalje upravljanje.
Bežični sistem može poduzeti kontrolne akcije i na ovajnačin se takmiče npr. sa postojećim sistemima zaautomatizaciju procesa ili konvencionalnimautomatizacijama koje se koriste u kućama.
Bežične senzorske mreže
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
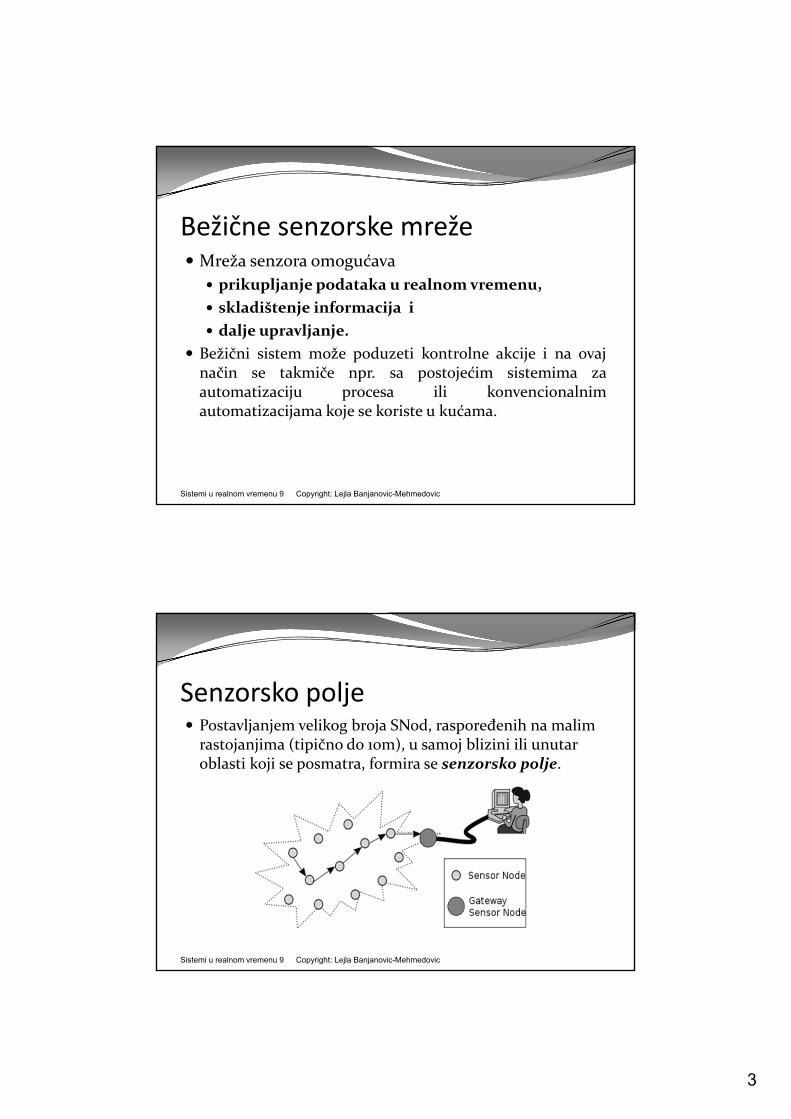
Senzorsko polje Postavljanjem velikog broja SNod, raspoređenih na malimrastojanjima (tipično do 10m), u samoj blizini ili unutaroblasti koji se posmatra, formira se senzorsko polje.
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic

4
Osnovni princip rada WSN‐a
Ukoliko pojedini elementi mreže, najčešće Sink/BS, imaju mogućnost aktivne interakcije sa okruženjem, takva senzorska mreža se naziva bežičnom senzorsko‐aktuatorskom mrežom (eng. Wireless Sensor‐Actuator Network, WSAN).
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
Interakcija Sink/BS i SN
Osnovne karakteristike SN i Sink/BS
Struktura multifunkcionalne platforme SN
Multifunkcionalna platforma senzorskog čvora sastoji se od 4 osnovne komponente:
senzorskog, procesorskog, komunikacionog, podsistema za napajanje energijom, podsistema za mobilnost
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic

5
Osnovne karakteristike SN i Sink/BS Osnovne karakteristike Snod‐a su:
ograničene rezerve energije,
male cijene izrade,
visoka integracija elektronskih komponenti i
mogućnost autonomnog rada bez održavanja.
Tipični SN uređaji imaju mogućnost prilagođenja okruženju, relativno malu procesorsku moć i memorijski kapacitet.
Sink/BS predstavljaju znatno složenije uređaje od SN, većih su dimenzija i imaju veće mogućnosti obrade podataka i komunikacije. Osim bežičnog interfejsa za potrebe komunikacije sa senzorskim čvorovima, Sink/BS posjeduju i interfejse za potrebe umrežavanja sa spoljnom telekomunikacionom infrastrukturom.
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
Osnovna komunikaciona arhitektura WSN
Osnovna komunikaciona arhitektura WSN Arhitektura WSN sa primjenom klasterizacije
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
6
Principi postavljanja i organizovanje WSN Principi postavljanja WSN:
Slučajno raspoređivanje (najčešće uniformno)
Plansko raspoređivanje (najčešće, praćenje saobraćaja u gradovima, industrijske primjene, sigurnosne primjene ).
Organizacija rada bežične telekomunikacione mreže:
na način tipičan za ad‐hoc WCN (čvorovi mreže uspostavljaju međusobne veze, organizuju topologiju mreže za potrebe rutiranja i uspostavljaju mehanizme za dodjelu i kontrolu pristupa resursima mreže korištenjem odgovarajućih protokola, bez upotrebe dodatne infrastrukture (npr. baznih stanica)) .
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
Topologije bežičnih senzorskih mreža
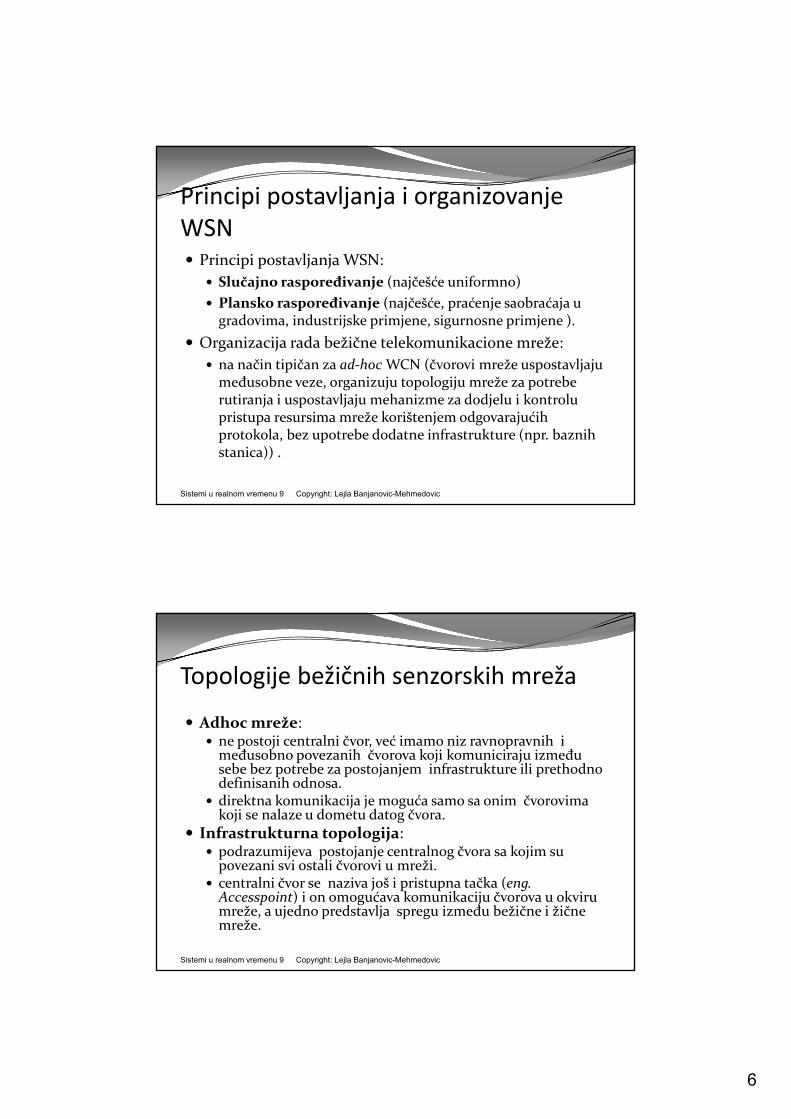
Adhoc mreže: ne postoji centralni čvor, već imamo niz ravnopravnih i međusobno povezanih čvorova koji komuniciraju između sebe bez potrebe za postojanjem infrastrukture ili prethodno definisanih odnosa.
direktna komunikacija je moguća samo sa onim čvorovima koji se nalaze u dometu datog čvora.
Infrastrukturna topologija: podrazumijeva postojanje centralnog čvora sa kojim su povezani svi ostali čvorovi u mreži.
centralni čvor se naziva još i pristupna tačka (eng. Accesspoint) i on omogućava komunikaciju čvorova u okviru mreže, a ujedno predstavlja spregu između bežične i žične mreže.
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic

7
Topologije bežičnih senzorskih mreža
Peer‐to‐peer mrežeomogućavaju čvorovimaizravnu komunikaciju s drugim čvorovima bezpotrebe da se ide krozcentraliziranikomunikacijski centar.
Svaki Peer uređaj možedjelovati i kao "klijent" ikao "poslužitelj" drugimčvorovima na mreži.
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
Peer to Peer mreža
Topologije bežičnih senzorskih mreža Zvijezda (eng. star)mreže su spojene na centralizirano komunikacijsko čvorište.
Čvorovi u mreži ne mogu izravno komunicirati jedni s drugim, sve komunikacije moraju biti preusmjerene kroz centralizovano čvorište.
Svaki čvor je "klijent", dok je središnji čvor "Server".
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
Primjer mreže Zvijezda (eng. Star)

8
Topologije bežičnih senzorskih mreža
Stablo (eng. Tree) mreže koriste jedan centralni čvor tzv. Root node (usmjeravajući čvor) kao glavni usmjerivač komunikacije.
Stablo mreža može se smatrati hibridnom mrežom nastalom spajanjem zvjezda i peer to peer umrežavanja.
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
Stablo mreža
Topologije bežičnih senzorskih mreža Bežična mesh mreža je
specifična peer‐to‐peer, multi‐hop mreža u kojoj su čvorovi povezani preko redudantnih međuveza i zajednički vrše rutiranje podataka.
Karakteristična za dinamičke, urbane sredine u slučajevima gdje je redundancija neophodna, a centraliziranu infrastrukturu je teško ili čak nemoguće implementirati
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
Mesh mreža
9
Potrošnja struje ograničena je za čvorove te se koristebaterije
Mogućnost popravke kvara na čvorovima
Mobilnost čvorova
Komunikacija pri kvarovima
Skalabilnost velikih razmjera implementacije
Sposobnost da radi u otežanim uslovima
Jednostavnost upotrebe
Glavne karakteristike WSN
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
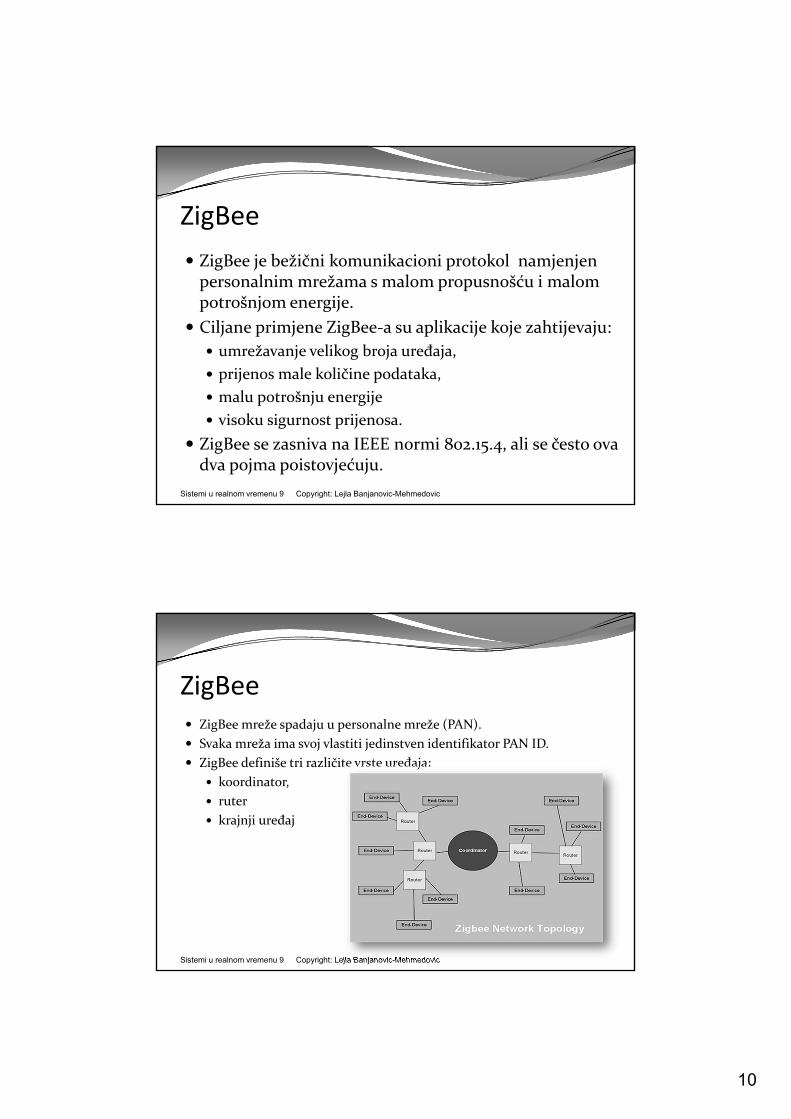
Usporedba bežičnih tehnologija
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
IEEE 802.15.4 Standard:•fokusira na male udaljenostiraspona podataka•mala brzina prenosapodataka•energetska efikasnost•niska cijena
10
ZigBee
ZigBee je bežični komunikacioni protokol namjenjenpersonalnim mrežama s malom propusnošću i malom potrošnjom energije.
Ciljane primjene ZigBee‐a su aplikacije koje zahtijevaju:
umrežavanje velikog broja uređaja,
prijenos male količine podataka,
malu potrošnju energije
visoku sigurnost prijenosa.
ZigBee se zasniva na IEEE normi 802.15.4, ali se često ova dva pojma poistovjećuju.
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
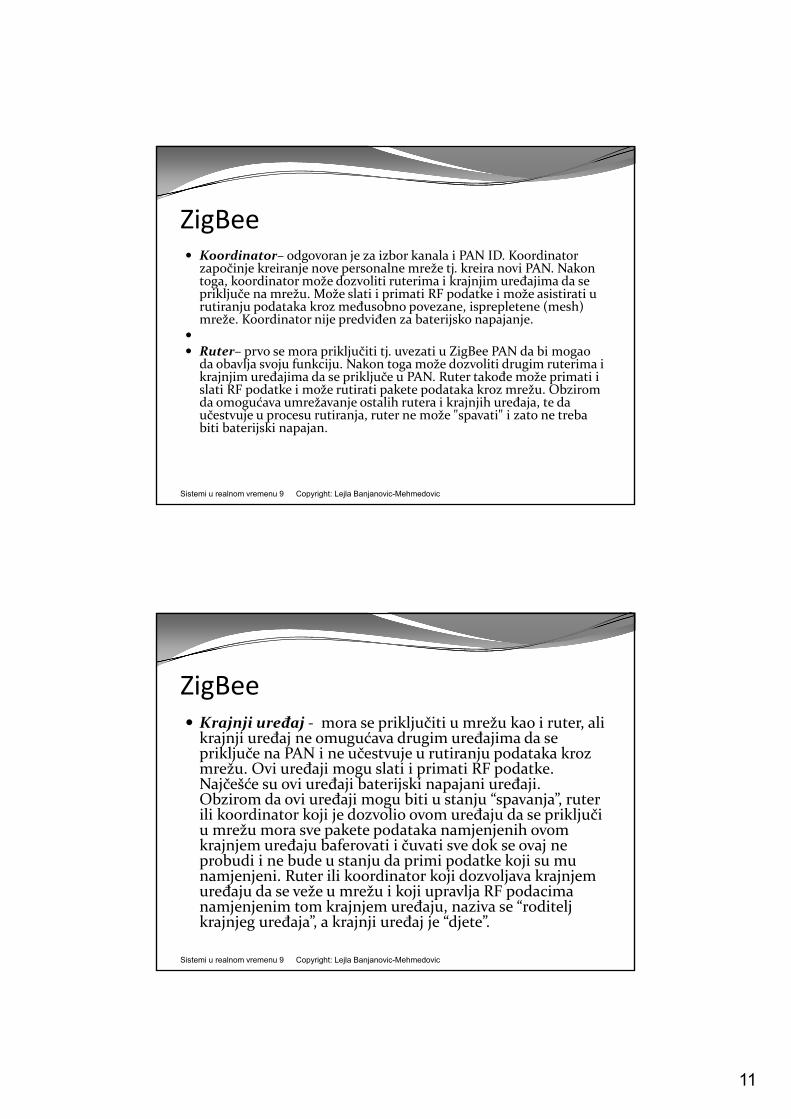
ZigBee ZigBee mreže spadaju u personalne mreže (PAN).
Svaka mreža ima svoj vlastiti jedinstven identifikator PAN ID.
ZigBee definiše tri različite vrste uređaja:
koordinator,
ruter
krajnji uređaj
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
11
ZigBee Koordinator– odgovoran je za izbor kanala i PAN ID. Koordinator
započinje kreiranje nove personalne mreže tj. kreira novi PAN. Nakon toga, koordinator može dozvoliti ruterima i krajnjim uređajima da se priključe na mrežu. Može slati i primati RF podatke i može asistirati u rutiranju podataka kroz međusobno povezane, isprepletene (mesh) mreže. Koordinator nije predviđen za baterijsko napajanje.
Ruter– prvo se mora priključiti tj. uvezati u ZigBee PAN da bi mogao
da obavlja svoju funkciju. Nakon toga može dozvoliti drugim ruterima ikrajnjim uređajima da se priključe u PAN. Ruter takođe može primati islati RF podatke i može rutirati pakete podataka kroz mrežu. Obziromda omogućava umrežavanje ostalih rutera i krajnjih uređaja, te daučestvuje u procesu rutiranja, ruter ne može "spavati" i zato ne trebabiti baterijski napajan.
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
ZigBee Krajnji uređaj ‐ mora se priključiti u mrežu kao i ruter, ali krajnji uređaj ne omugućava drugim uređajima da se priključe na PAN i ne učestvuje u rutiranju podataka kroz mrežu. Ovi uređaji mogu slati i primati RF podatke. Najčešće su ovi uređaji baterijski napajani uređaji. Obzirom da ovi uređaji mogu biti u stanju “spavanja”, ruter ili koordinator koji je dozvolio ovom uređaju da se priključi u mrežu mora sve pakete podataka namjenjenih ovom krajnjem uređaju baferovati i čuvati sve dok se ovaj ne probudi i ne bude u stanju da primi podatke koji su mu namjenjeni. Ruter ili koordinator koji dozvoljava krajnjem uređaju da se veže u mrežu i koji upravlja RF podacima namjenjenim tom krajnjem uređaju, naziva se “roditelj krajnjeg uređaja”, a krajnji uređaj je “djete”.
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
12
ZigBee
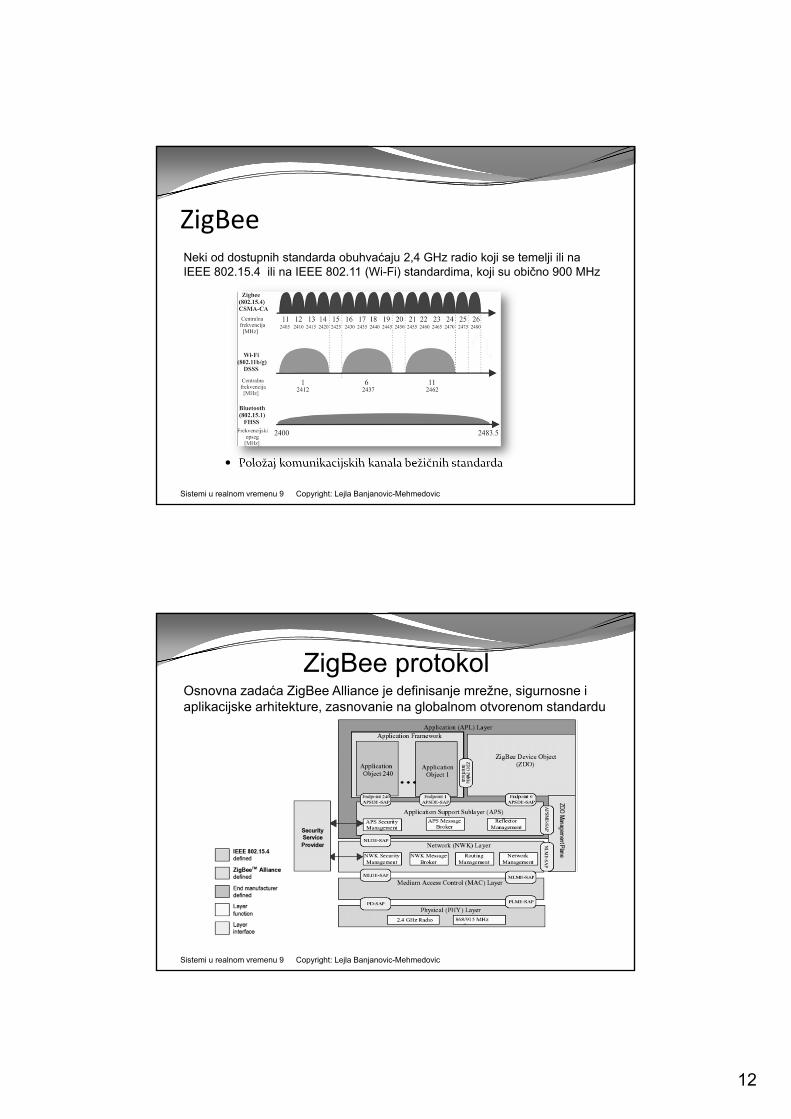
Položaj komunikacijskih kanala bežičnih standarda
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
Neki od dostupnih standarda obuhvaćaju 2,4 GHz radio koji se temelji ili na IEEE 802.15.4 ili na IEEE 802.11 (Wi-Fi) standardima, koji su obično 900 MHz
ZigBee protokolOsnovna zadaća ZigBee Alliance je definisanje mrežne, sigurnosne i aplikacijske arhitekture, zasnovanie na globalnom otvorenom standardu
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
13
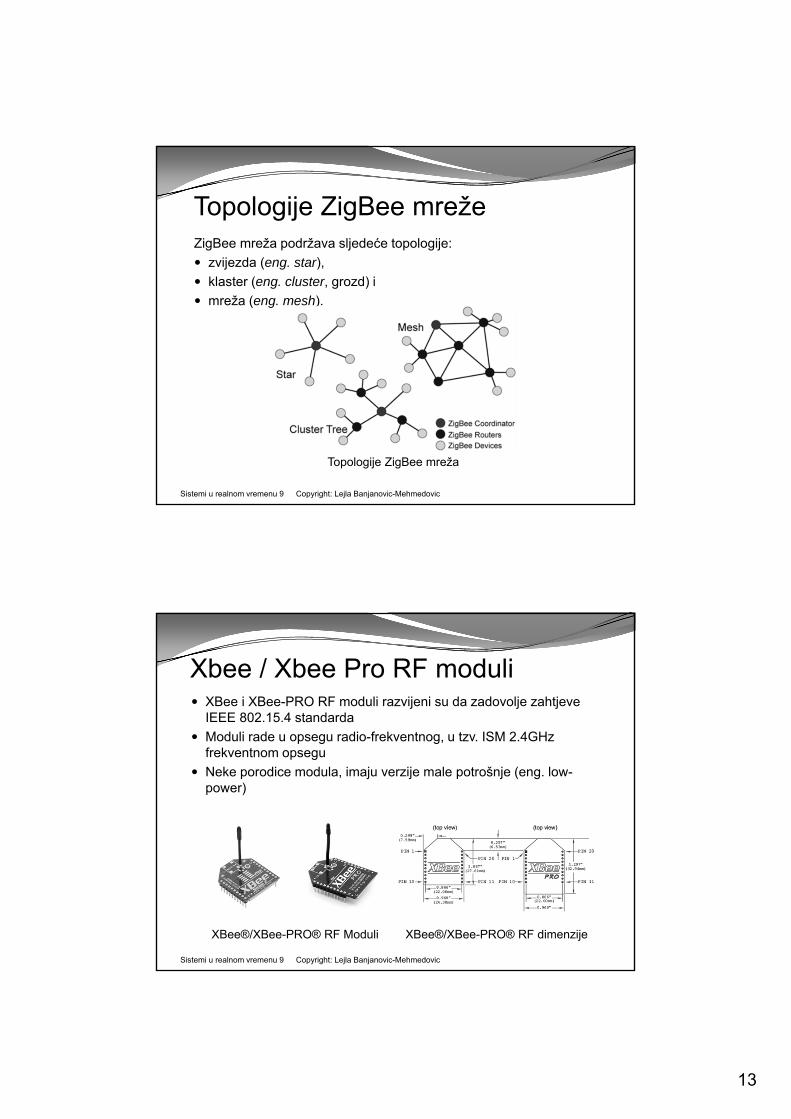
Topologije ZigBee mreže ZigBee mreža podržava sljedeće topologije:
zvijezda (eng. star),
klaster (eng. cluster, grozd) i
mreža (eng. mesh).
Topologije ZigBee mreža
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
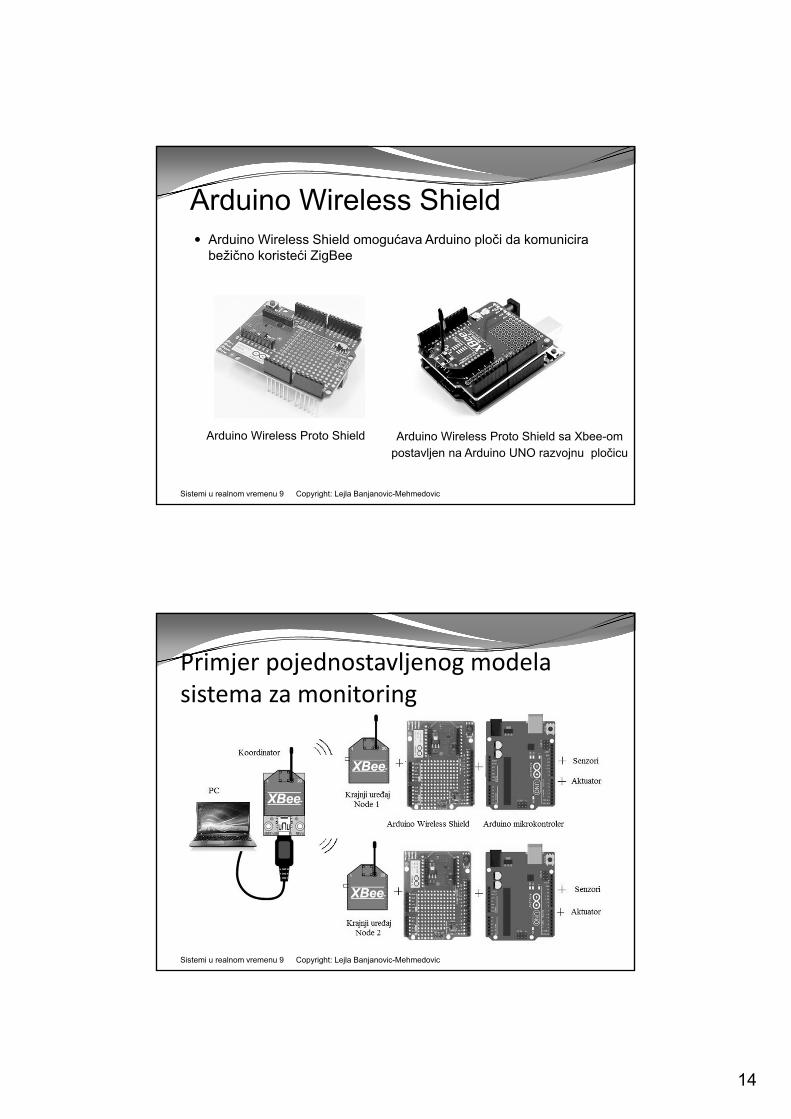
Xbee / Xbee Pro RF moduli XBee i XBee-PRO RF moduli razvijeni su da zadovolje zahtjeve
IEEE 802.15.4 standarda
Moduli rade u opsegu radio-frekventnog, u tzv. ISM 2.4GHz frekventnom opsegu
Neke porodice modula, imaju verzije male potrošnje (eng. low-power)
XBee®/XBee-PRO® RF Moduli XBee®/XBee-PRO® RF dimenzije
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
14
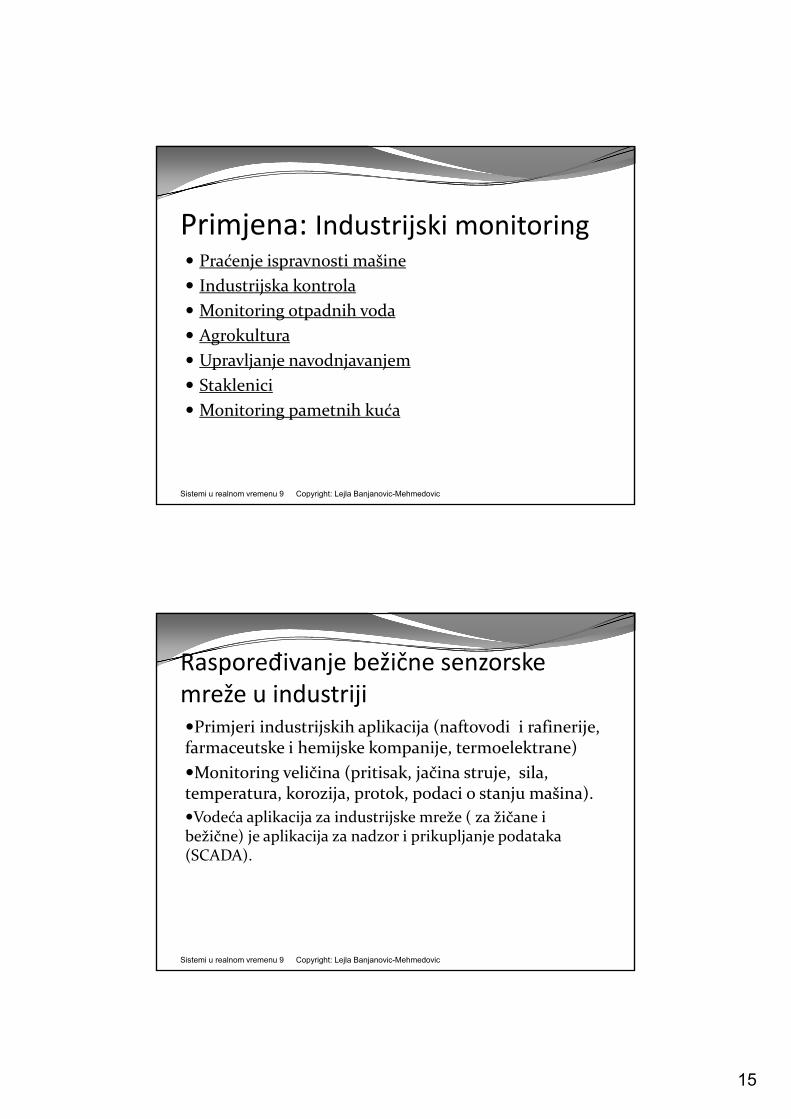
Arduino Wireless Shield Arduino Wireless Shield omogućava Arduino ploči da komunicira
bežično koristeći ZigBee
Arduino Wireless Proto Shield Arduino Wireless Proto Shield sa Xbee-om postavljen na Arduino UNO razvojnu pločicu
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
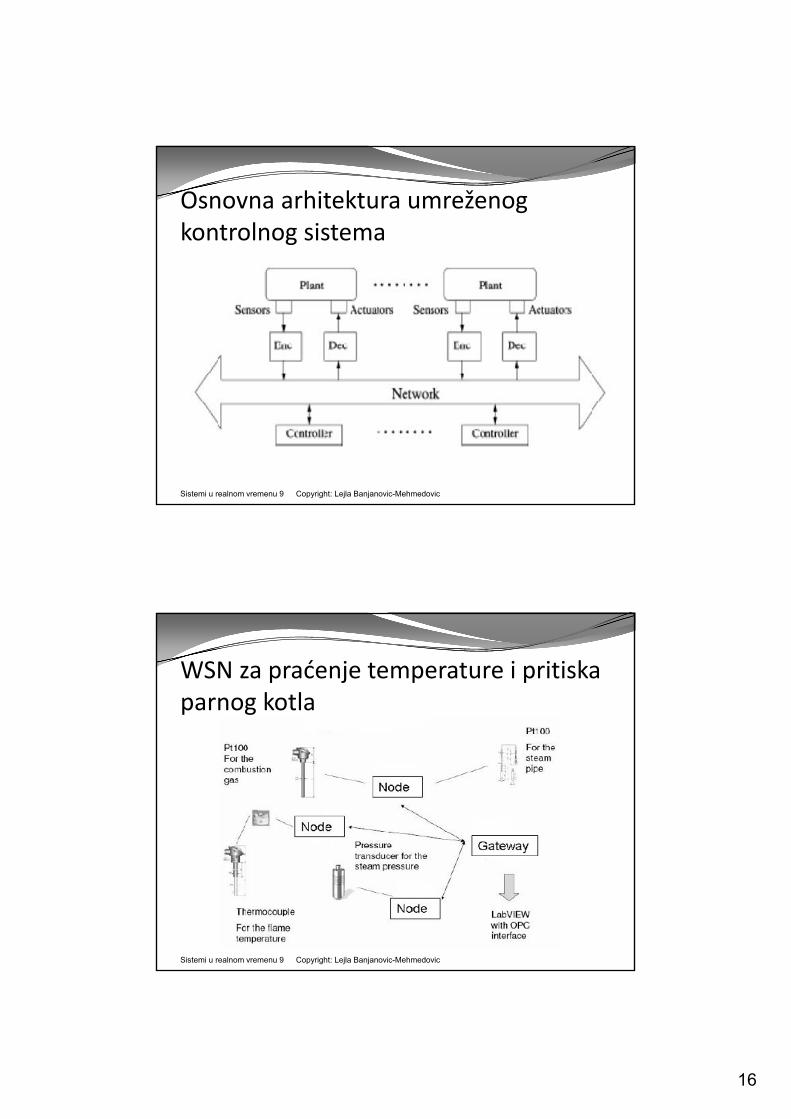
Primjer pojednostavljenog modelasistema za monitoring
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
15
Praćenje ispravnosti mašine
Industrijska kontrola
Monitoring otpadnih voda
Agrokultura
Upravljanje navodnjavanjem
Staklenici
Monitoring pametnih kuća
Primjena: Industrijski monitoring
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
Raspoređivanje bežične senzorske mreže u industriji Primjeri industrijskih aplikacija (naftovodi i rafinerije, farmaceutske i hemijske kompanije, termoelektrane)
Monitoring veličina (pritisak, jačina struje, sila, temperatura, korozija, protok, podaci o stanju mašina).
Vodeća aplikacija za industrijske mreže ( za žičane i bežične) je aplikacija za nadzor i prikupljanje podataka (SCADA).
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
16
Osnovna arhitektura umreženog kontrolnog sistema
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
WSN za praćenje temperature i pritiskaparnog kotla
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
17
Smetnje u industrijskom okruženju
Višefazno umnožavanje : na jačinu signala može ozbiljno uticati refleksija od zidova
Smetnje sa drugih uređaja
Buka koju stvara oprema i teški uređaji
Širok opseg radne temperature, jake vibracije i onečišćenja u zraku
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
Monitoring zdravstvene zaštite
Monitoring okoline
Monitoring kvalitete zraka
Unutrašnji monitoring
Vanjski monitoring
Monitoring zagađenja zraka
Detekcija šumskog požara
Sprečavanje prirodnih katastrofa
Monitoring kvaliteta vode
Otkrivanje klizišta
Primjena: monitoring životnog okoliša
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
18
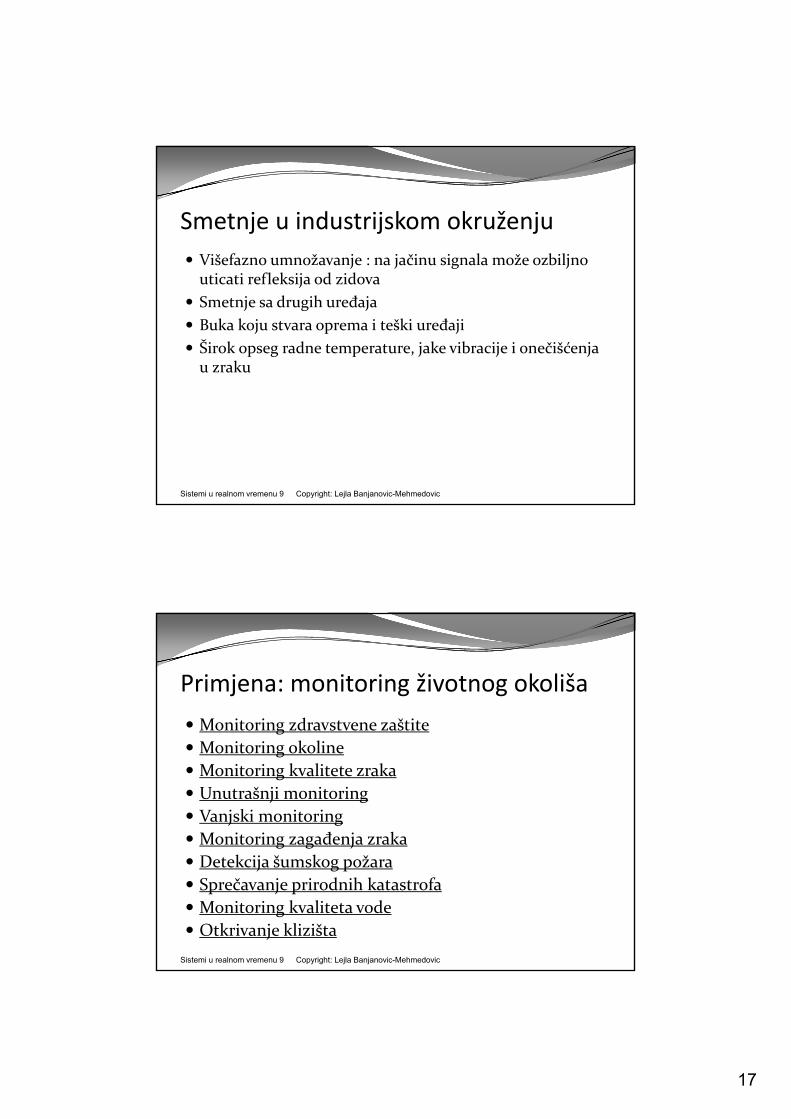
MOTEL (A Mobile Robotic‐Assisted Wireless SensorNetworks Testbed)
Primjer: Kooperativni mobilni roboti
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
MOTEL platforma se sastoji iz:
FLEXOR, kontroliše fleksibilnu softversku arhitekturukoja omogućava daljinsko ispravljanje grešaka,razmjenu i bilježenja podataka sa senzorskih čvorova,bez potrebe za backchannel.
MuRobA, multi‐robotska arhitektura koja omogućavaplaniranje i izvršavanje dobro definisanih scenarijamobilnosti koja se razlikuju od uobičajenih.
Primjer: Kooperativni mobilni roboti
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic

19
Nadzor cijevi u industrijskim objektima korištenjem biomimetičkih robota
Utvrđivanje nenormalnih uslova u prenosnim cijevima u fabričkim postrojenjima
Koristi se:
SCADA sistem
Pokretne tačke posmatranja (roboti), kao dodatak fiksnim senzorima, koji prikupljaju mjerne podatke tokom pretraživanja putanje (duž cijevi), a što je bazirano na real‐time lokaciji robota.
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
Nadzor cijevi u industrijskim objektima korištenjem biomimetičkih robota Pogodan oblik robota (inspirisan biološkim živim svijetom), prilagodljiv na cijevi u fabričkim uslovima
Mjerni podaci cijevi se skupljaju i prenose prema serveru kako bi se ustanovilo isticanje, vibracija ili temperaturne promjene.
Kako bi robot izvršio zadatak kao mobilni agent, robot mora biti u adekvatnom obliku, sa prikačenim drajverom i interfejsom, sa uključenim baterijskim pakovanjem
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic

20
Nadzor cijevi u industrijskim objektima korištenjem biomimetičkih robota
Integracija svih funkcijskij jedinica na mikrokontrolersku platformu cjevnog robota
Struktura hvataljke cjevnog robota
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic
Nadzor cijevi u industrijskim objektima korištenjem biomimetičkih robota Neophodan server za izvještavanje o tačnoj lokaciji robota i neophodna međusobna komunikacija
U cilju proračuna lokacije mobilnog robota, koriste se fiksne mjerne tačke označene sa RF trakama. One daju koordinate, koje pomažu robotu da se locira, kada se kreće konstantnom brzinom dok skuplja i šalje podatke. Ovo je omogućeno proračunom distance između RF trake i robota, korištenjem ukupnog vrmena koje je potrebno robotu za kretanje, isključujući vrijeme dok robot miruje.
Sistemi u realnom vremenu 9 Copyright: Lejla Banjanovic-Mehmedovic





























