Embed Size (px)
Citation preview

Folie 1Verkehrskonzepte der Zukunft Folie 1Folie 1
Lehrstuhl FahrzeugmechatronikFakultät Verkehrswissenschaften Institut für Automobiltechnik Dresden - IAD
Verkehrskonzepte der Zukunft
Vortrag vonProf. Dr.-Ing. Bernard Bäker
Technische Universität DresdenInstitut für Automobiltechnik Dresden – IAD
Institute of Automotive Mechatronics – IAM GmbH
Neue elektrifizierte Antriebsarchitekturen
8. März 2010 - Nürnberg

Verkehrskonzepte der Zukunft Folie 2Folie 2
Inhaltsverzeichnis
1.Einleitung und MotivationHerausforderung ElektromobilitätAnforderungslandschaft
2.Die Wahrheit über das ElektroautoHistorie - Fakten und Hintergründe – ChancenElektrochemieInfrastrukturen
3.Elektrofahrzeuge der nächsten GenerationAbleitung der wirklich anstehenden AufgabenElektrische Speichersysteme und Neue FahrzeugarchitekturPrädiktive und retrodiktive BetriebsstrategienOptimierung eines Gesamtenergiemanagements
4.Zusammenfassung und Ausblick

Verkehrskonzepte der Zukunft Folie 3
Lohner-Porsche aus dem Jahre 1900•Erstes Elektrofahrzeug auf der Weltausstellung in Paris •Elektrischer Antrieb mit bis zu 7 PS an der Vorderachse•Energieversorgung durch 44-zelligen Bleiakku mit 80 Voltund Energie für ca. 3 Stunden•Die Höchstgeschwindigkeit: 58 km/h
• Erstmaliger Durchbruch der 100 km/h Geschwindigkeitsmarke:
• 29.4.1899 erreichte der Rennfahrer Camille Jenatzy mit dem Elektroauto «La Jamais contente» bereits 105,8 km/h
• Sie wurde von Elektromotoren angetrieben und wog 1450 kg.
• Es bedeutet übrigens "die niemals Zufriedene“, da sie angeblich keine Bremse eingebaut hatte. (elektromobil.com)
Einleitung und MotivationHerausforderung Elektromobilität
Folie 3

Verkehrskonzepte der Zukunft Folie 4Folie 4
Einleitung und EinleitungHistorie
Der EV-1 von GMBereits 1996 brachte General Motors den EV-1 heraus. Das Fahrzeug wurde lokal begrenzt als Leasingmodell in den USA eingeführt, inkl. einer vollständigen Infrastruktur mit zentralen Ladestationen.
Quelle: Medienberichte und Video, Autor: Chris Paine, Sony Pictures Classics,Erscheinungsjahr 2006.
Technische Daten (Auszug):
Höchstgeschwindigkeit: 129 km/hBeschleunigung 0-100 km/h: 8,5sReichweite (100km/h): 220km (140 miles)Verbrauch: 18 kwh/100kmNiMH-Akkus (26 Blöcke):Blockspannung: 12VBlockkapazität 53 AhGesamtkapazität: 16,3 kWhGesamtspannung: 312VLadegerät: 1,1kW/110V / 6,6kW/220VInduktiver Ladestecker ->Ladezeit (6,6kW): 3hNachfolger: GM Chevrolet Volt1117 EV1-Fahrzeuge wurden hergestellt800 gingen an ausgewählte KundenProduktionszeit: 1996-1999

Verkehrskonzepte der Zukunft Folie 5Folie 5
Einleitung und MotivationLadestationen - Aktuelle Realität
Quelle: Daimler AG, 2009.
Quelle: BMW AG, 2009.
Quelle: Mitsubishi, 2009.
Verkehrskonzepte der Zukunft Folie 6
Anforderungslandschaft ElektromobilitätKey-Player im Zusammenspiel
Folie 6
Politik (Emissionen, CO2-Grenzwerte, Steuereinnahmen, Infrastruktur,Verkehrswege, Energieversorgung, RE)
Energieversorger (Grundlastfähigkeit, RE, Geschäftsmodell)
Mineralölindustrie (Kraftstoffpreise, Zukunftsabsatz, Geschäftsmodelle)
Endkunde, Kundennutzen (Reichweite, Kosten, Verbrauch, Lebensdauer,Funktionsumfang)
Fahrzeughersteller (Absatzzahlen, Rendite, Emissionen, Fahrzeuggewicht,Verbrauch)
Automobile Systemlieferanten (Stückzahlen, Energieeffizienz)
Elektrische Energiespeicher (Bauform, Gehäuse, Absicherung, Spannungslage,Temperierung, Batteriemanagement, Schnellladung, Ladezustand, Balancing,Ausfall, Lebensdauer)
Aspekte der Elektromobilität

Verkehrskonzepte der Zukunft Folie 7
Mindmap zurElektromobilität
Folie 7

Verkehrskonzepte der Zukunft Folie 8
Die Wahrheit über das ElektroautoReichweitendiskussion
Folie 8
Reichweite einer 125kg schweren Batterie
Vergleich bzgl. Energieinhalt vs. Gewicht zuraktuellen Common-Rail Diesel-Technologie
1600km0
70
160
1500
150
Blei / 5 kWh
NiMH / 10 kWh
Li-Ionen / 25 kWh – ca. 40TEUR Fzg.-Preis *1
Diesel-Motor, 80l Tank – 5,x l/100km Verbrauch – ca. 42TEUR Fzg.-Preis *2
30
Quel
le:
EVO
NIC
2009 /
AD
AC Z
uku
nft
stec
hnolo
gie
n,
Münch
en 2
009.
*1: Im dt. Energiemix umgerechnet ca. 108 g/km CO2-Ausstoß zzgl. CO2-Anteil durch Infrastruktur*2: Nach Herstellerangaben 150 g/km CO2-Ausstoß (z.B. Mercedes-Benz E250CDIBlueEfficiency)

Verkehrskonzepte der Zukunft Folie 9
Seltene Erden und (Halb)MetalleChemie und Elektrochemie der Batterien
Seltene Erden
(Halb)Metalle, deren Wert sich inden letzten Jahren vervielfacht hat
Folie 9
Periodensystem der Elemente
Quel
le:
Pat
yk,
Andre
as,
Ther
moel
ektr
ik:
Ein
e Chan
ce f
ür
nac
hhaltig
e M
obili
tät?
, in
: Jä
nsc
h,
Dan
iel (H
rsg.)
, Ther
moel
ektr
ik.
Ein
e Chan
ce f
ür
die
Auto
mobili
ndust
rie,
Ren
nin
gen
, 2009.
TellurPreissteigerung2001‐20051313%
Indium Preis 2005:810 US‐$/kgPreissteigerung2001‐2005:575 %
CaesiumPreis 2005:14.890 US‐$/kg
Verkehrskonzepte der Zukunft Folie 10Folie 10
Lithium-Preisentwicklung
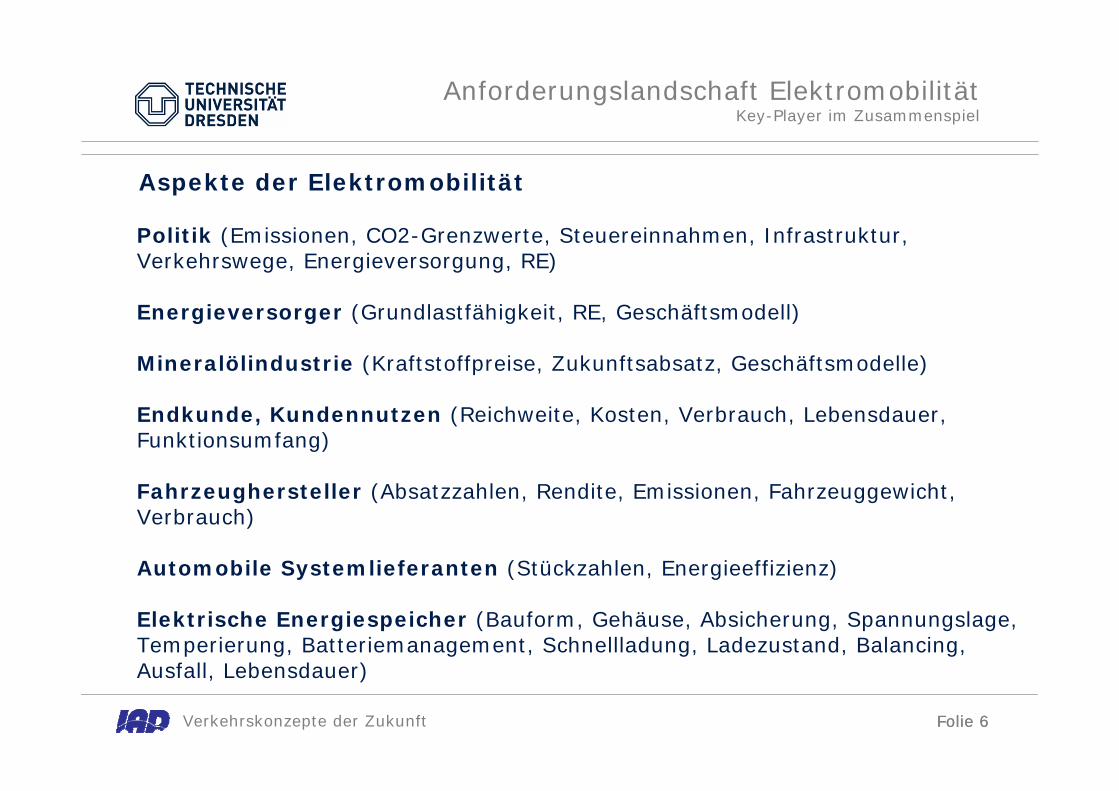
Gewinnung von Lithium in Bolivien im größten Salzsee der Erde
Gewinnung von Lithium aus Salzen,in Bolivien, Salar de Uyuni.
Im Salzsee von Uyuni werden laut U.S. Geological Survey mit 5,4 Millionen Tonnen sehr große Vorkommen an Lithium vermutet. Da Lithium-Batterien aufgrund ihrer Energiedichte, hohen Zellspannung und einer geringen Selbstentladung in vielen elektronischen und elektrischen Geräten zum Einsatz kommen, ist das Element Lithium inzwischen ein wertvoller Rohstoff für die Automobilindustrie mit hohem Wachstumspotential.
Boliviens Präsident Evo Morales gab bereits 2007 das Projekt einer Pilotfabrik zur Lithium-Gewinnung aus dem Salar de Uyuniin Auftrag. Mit Dekret vom 1. April 2008 wurde der Industrialisierung der Ressourcen des Salars nationale Priorität eingeräumt und die staatlichen Bergbaugesellschaft COMIBOL bekam eine zusätzliche Abteilung für die Ausbeutung des Salzsees, mit einem Budget von 5,7 Mio. US-Dollar.
Der Bau der Pilotfabrik in Llipi Loma im Kanton Rio Grande begann im Mai 2008. Das Pilotprojekt umfasst auch die Entwicklung von Technologien zur Gewinnung von Lithiumkarbonat, da die Witterungsumstände und die Beschaffenheit der Salzlake des Salars bisherige Methoden nicht begünstigen.
Preisentwicklung von Lithium

Verkehrskonzepte der Zukunft Folie 11
Blick in die GlaskugelWann wird ein Elektrofahrzeug wirklich günstiger sein?
Folie 11

Verkehrskonzepte der Zukunft Folie 12
Fazit und Lösungsszenarien
Fazit• Die Elektromobilität ist zunächst für urbane Regionen interessant• Ein lokales Energiemanagement reicht nicht aus• Es gibt Alternativen zu Hochvoltspannungslagen in Kfz-Bordnetzen• Der Hybridantrieb wird sich als Antriebsart im Kraftfahrzeug etablieren• Die Elektromobilität ist ein Infrastrukturthema• Statt einer Elektromobilitätsrevolution erfolgt eine Evolution in kleinen
Stufen
Lösungsszenarien für eine nachhaltige,massentaugliche Elektromobilität:• Energieeffizientes Gesamtfahrzeugmanagement• Prädiktive Betriebsstrategie und Fahrtroutenplanung• Alternative Batterie- und Antriebskonzepte• Entwurf einer übergreifenden Bewertungsmetrik zur frühzeitigen
Potenzialabschätzung
Folie 12

Verkehrskonzepte der Zukunft Folie 13Folie 13Folie 13
Modulares Gesamtfahrzeugmanagement
Modellbasierte Entwicklung und Optimierung zukünftiger, modularer, energieeffizienter Online-Betriebsstrategien mit prädiktiven und retrodiktiven Funktionsstrukturen.
Übergreifender Managementansatz am IADPrädiktive Betriebsstrategien für Fahrzeuge mit modernen Antriebskonzepten
Legende:
A: Navigation/Fahrzeugdaten/Car2X-Kommunikation
B: Prädiktion/Retrodiktion
C: Fahrzyklus
D: Fahrermodell
E: Betriebsstrategie/Energiemanagement/Optimierung
F: Fahrzeugmodell/el. Energiespeicher
A B
C D E
F
Verkehrskonzepte der Zukunft Folie 14
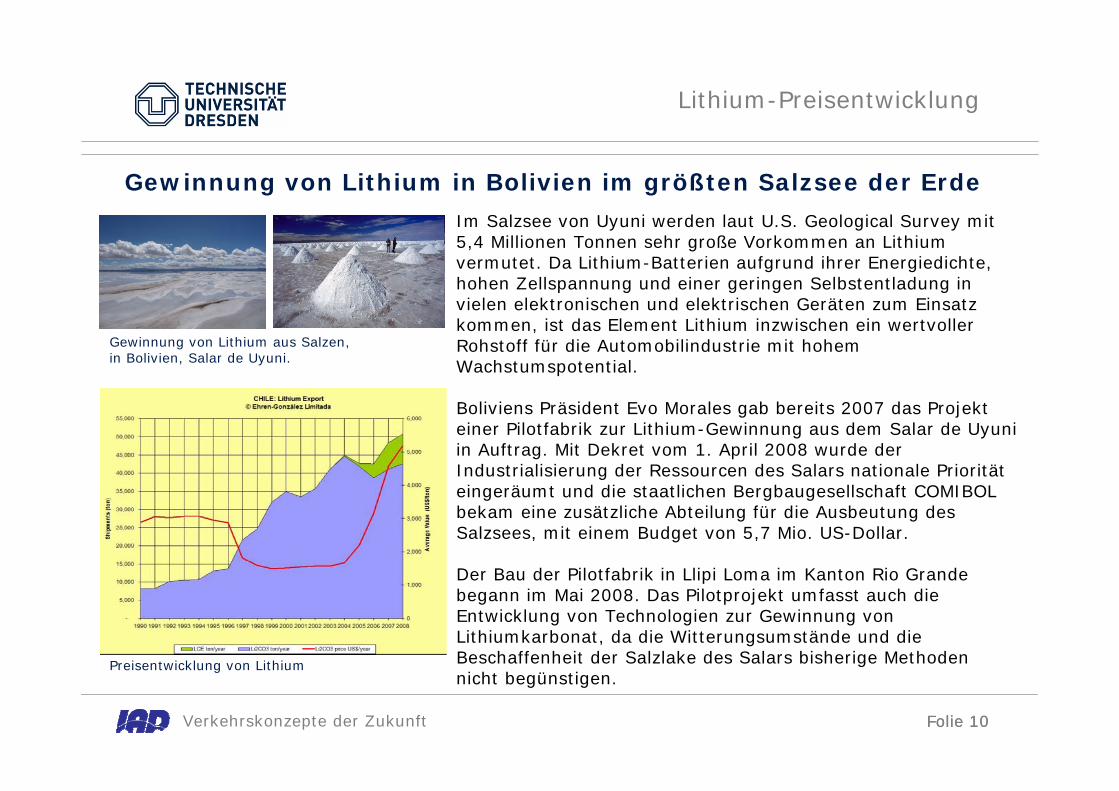
Simulationsrandbedingungen• Reines Elektrofahrzeug
• Variationsrechnungen Bordnetzlast und Fahrzeugmasse (NEFZ und FTP75-Zyklus)
Legende:
1 Fahrzyklus
2 Fahrermodell
3 Batteriemodell
4 Bordnetzmodell
5 Elektromaschine
6 Achsübersetzung7 Fahrzeugmodell
31 2
7
6
4
5
Modellbildung und SimulationAm Beispiel eines reinen Elektrofahrzeugs
Folie 14

Verkehrskonzepte der Zukunft Folie 15
X-Volt-Bordnetze
Folie 15
Quelle: O. Sirch, BMW AG, München 2009.
Spannungslagen für zukünftige Energiebordnetze

Verkehrskonzepte der Zukunft Folie 16
Forschungsprojekt Cool Energy Car CommunicationTeilaspekt Anzeigesystem für die Restlaufzeit der Rotlichtphase

Verkehrskonzepte der Zukunft Folie 17
Räder
Energieflussschema für Kraftfahrzeuge
Elektr. SpeicherKraftstofftank
EchemEchem
Verbrennungsmotor
EchemEchem Etherm
Etherm WmechWmech
Getriebe / Antriebsstrang
WmechWmech
E-Maschine(n)
WmechWmech Eelek
Eelek
Eelek-chemEelek-chem
EkinEkin Epot
Epot
WmechWmech
Verbrennungsmotorischer Zweig
Unidirektionaler Energiefluss
Bidirektionaler Energiefluss
Elektromotorischer Zweig
iG
PEMPVM
Konventionelles Fahrzeug:1 Freiheitsgrad (iG)
Hybridfahrzeug:2 Freiheitsgrade (iG, PEM/PVM)

Verkehrskonzepte der Zukunft Folie 18
Zustandsspezifischer Betriebsbereich
VM
GangGang SOCSOC Wunsch-moment
Wunsch-moment
Bremse
+
Mom
ent
Drehzahl
-
EM
Fahrge-schwindigkeit
Fahrge-schwindigkeit
Betriebsoptionen
BetriebsmodusBetriebsmodus Betriebsgrößen (EM,VM…)Betriebsgrößen (EM,VM…)
Boost
LPA
VM
EM
EM-gen
Bremse
VM-schlepp
……
VM: Verbrennungsmotor
EM: Elektromotor
SOC: State Of Charge (Ladezustand der Batterie)
LPA: Lastpunktanhebung

Verkehrskonzepte der Zukunft Folie 19
Nutzung der vorausschauenden FAS in Kraftfahrzeugen
Betriebsführungdes
Antriebsstrangs
Betriebsführungdes
Antriebsstrangs
Verkehrs-beeinflussendeMaßnahmen
Verkehrs-beeinflussendeMaßnahmen
PrädiktiveFahrerassistenzsysteme
PrädiktiveFahrerassistenzsysteme
Kraftstoff-verbrauchs-reduktion
Kraftstoff-verbrauchs-reduktion
Emissions-reduktion
Emissions-reduktion
Geräusch-reduktion
Geräusch-reduktion
Fahr-performance
Fahr-performance
• Prädiktive FAS können durch ihre Nutzung die Betriebsführung des Antriebsstrangs verbessern
• Verkehresbeeinflussende Maßnahmen interagieren vorteilhaft mit Fahrerassistenzsystemen

Verkehrskonzepte der Zukunft Folie 20
Struktur von Betriebsstrategien
Funktionsebenen desFahrzeugmanagements:
Hardware Regelung / SteuerungHardware Regelung / Steuerung
BetriebszustandmanagementBetriebszustandmanagement
PrädiktionsdatengenerierungPrädiktionsdatengenerierung

Verkehrskonzepte der Zukunft Folie 21
Funktionale Klassifikation von Betriebsstrategien
Heuristische MethodenHeuristische Methoden
BetriebsstrategienBetriebsstrategien
OptimalsteuerungOptimalsteuerung
WissensbasierteFormulierung
WissensbasierteFormulierung
Ökonomische ModelleÖkonomische Modelle
SelbstorganisierendSelbstorganisierend
ZustandsdiagrammeZustandsdiagramme
Fuzzy LogikFuzzy Logik
Neuronale NetzeNeuronale Netze
Kontinuierliche RegelungKontinuierliche Regelung
Bayes‘sche NetzeBayes‘sche Netze
Modellprädiktive RegelungModellprädiktive Regelung
NMPCNMPC
DirektesMehrzielverfahren
DirektesMehrzielverfahren
SequentielleQuadratische
Programmierung
SequentielleQuadratische
Programmierung
Anpassungsfähigkeit der Betriebsführung
Nichtlineares Problem

Verkehrskonzepte der Zukunft Folie 22
Statische, zustandsbasierte Strategie
Antwort
MRad
nRad
Pel
PZA
βk
GeräuschAbgasVerschleiß…
Restriktionen
Steuervektor Sensorvektor
TEM
TVM
TBatt
QBatt
…
MVM
nVM
iGetr
MEM
nEM
…
MRadmax
nEMmax
PEMmax
TEMmax
…EBatt>0
Anforderungen
MRad
nRad
Pel
PZA
…
Zustandsbasierte Betriebsstrategie
Z.1
Z.1.1 Z.1.2
Z.2 Z.3
Zustandsautomat als abstrakte Repräsentation der wissensbasierten Strategie („wenn x dann y“)

Verkehrskonzepte der Zukunft Folie 23
Statische, zustandsbasierte Strategien
Z.1Rein elektromotorischRein elektromotorisch Rein verbrennungsm.Rein verbrennungsm. BremsenBremsen
Kombinierter Betrieb EM & VMKombinierter Betrieb EM & VM
BoostingBoosting LastpunktverschiebungLastpunktverschiebung
AnhebungAnhebung AbsenkungAbsenkung
PEM=Psoll
MEM=Msoll/iG
PVM=Psoll
MVM=Msoll/iG
PEM+PBremse=Psoll
MEM+MBremse=Msoll/iG
PVM+PEM=Psoll
MVM+MEM=Msoll/iG
MVM=MVMmax(n)
MEM=Msoll/iG-MVM PEM<0 PEM>0

Verkehrskonzepte der Zukunft Folie 24
Statische, zustandsbasierte Strategien
Zustandsübergänge als „Variationsparameter“
MEM=MRad/iEM
MEM=0
MBrems=0
MBrems=MRad
MEM=MEMmax
MBrems=MRad-MEMmax·iEM
|MRad/iEM| < MEMmax
[SOC < SOCmax] und [ |MRad/iEM| < MEMmax]
|MRad/iEM| > MEMmax
[SOC > SOCmax] oder [ |MRad/iEM| > MEMmax ]
[SOC > SOCmax]
|MRad/iEM| > MEMmax
und [SOC < SOCmax]
physikalisch determiniert
wissenbasierte Festlegung
Rein generatorischRein generatorischGeneratorisch &
Reibbremse
Generatorisch & Reibbremse
BremsenBremsen
ReibbremseReibbremse
Verkehrskonzepte der Zukunft Folie 25
Adaptive, zustandsbasierte Strategien
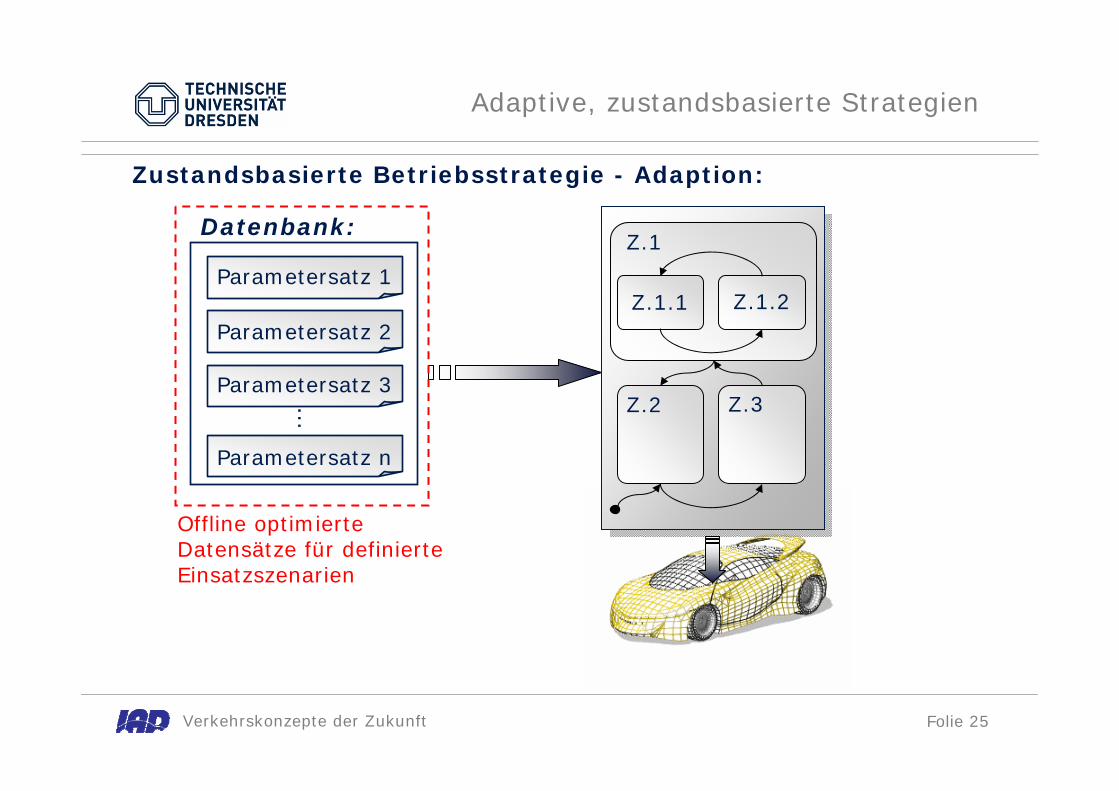
Zustandsbasierte Betriebsstrategie - Adaption:
Parametersatz 1
Parametersatz 2
Parametersatz 3
Parametersatz n
Z.1
Z.1.1 Z.1.2
Z.2 Z.3…
Datenbank:
Offline optimierte Datensätze für definierte Einsatzszenarien

Verkehrskonzepte der Zukunft Folie 26
Grundkonzept
Fahrzeug-umfeldsensorik
GPS-Daten Car-2-XKommunikation
Routenerkennung
Steuerung und Regelungder Systemkomponenten
Betriebsstrategie
prädizierter Verlauf
• Es existieren mehrere Methoden zur Generierung von Prädiktionsdaten
• Aus den zur Verfügung stehenden Daten wird der Fahrverlauf für eine bestimmte Zeit/ Strecke vorausgesagt (Prädiktionshorizont)
• Dieser kann für die Berechnung einer Optimalsteuerung der Fahrzeugkomponenten in Bezug auf Emissionen, Kraftstoffverbrauch etc. genutzt werden
• Nach einem festgelegten Δt kann die Optimierung von neuem durchgeführt werden
t
vh
t
MEM
MVM
iG
Onlineoptimierung

Verkehrskonzepte der Zukunft Folie 27
Gleitende Prädiktion anhand des NEFZ veranschaulicht
Arbeitsweise der gleitenden Prädiktion
in gleichen Abständenerneute Prädiktion(Fahrtvorausschau)
für jede Prädiktion Berechnung neuer optimaler Kombinationen MEM, MVM, iGetriebe
Verwendung nur der (ersten ΔTpräd/Δt) Kombinationen bis zur nächsten
Prädiktion (Optimierung)

Verkehrskonzepte der Zukunft Folie 28
Bisherige Ergebnisse durchgeführter Simulationen
Ergebnisse: Verbrauchseinsparung in Abhängigkeit des Prädiktionshorizonts
100%75%50%50-70s10-15s5-8s
75%
50%
InnerstädtischStop&Go
AußerstädtischHochgeschwindigkeit

Verkehrskonzepte der Zukunft Folie 29
Forschungsprojekt Cool Energy Car CommunicationTeilaspekt Energieeffiziente Betriebsstrategie durch Signalerkennung

Verkehrskonzepte der Zukunft Folie 30
Kameramodul
Radar/ Lidar
Car2X-Kommunikation
interne Sensorik
Fahrerverhalten
Routenerkennung
Fahrverlaufsprädiktion
t
vh
prädiktiveBetriebsstrategie
GPS/ NavigationOnline-
Reichweitenermittlung
MMI(Visualisierung)
Ansteuerung der Traktionsaktorik
Dat
enfu
sionsa
lgorith
mus
Prädiktion
Retrodiktion
ωVM, MVM
MEM
MGes
ωR
ad, MRad
ωR
ad, MRad
VM
EM
Kupplung
Batterie
Getriebe
IEMUEM
t
MEM
MVM
iG
Integration von Prä- und RetrodiktionsinformationenBetriebsstrategie vs. Routenstrategie – Energetische Assistenzsysteme
Folie 30

Verkehrskonzepte der Zukunft Folie 31
Ansatz einer fusionsgestützten FahrverlaufsprädiktionBetriebsstrategie vs. Routenstrategie
?
t+1tt-1 t+k t+N Zeit t
Prädiktionsmodul 1:Verkehrszeichenerkennung
Fahrprofil
v(t)
Prädiktionsmodul 2:Ampel-Fzg-Kommunikation
Prädiktionsmodul n:z.B. Zustandsbasierte Fahrereigniserkennung
Fusionsgestützte Fahrverlaufsprädiktion Profil ‚v_60‘ & ‚TL_red‘ & ‚Curve_l‘ Profil ‚v_30‘
Prädiktionshorizont N(t)
Prädiktive Umfeldinformationen
InformationsfusionAttribuierung einzelner Detektionsereignisse
< 0grad( ) > 0Blinker_l: ‚on‘
Lσ Ereignis
‚Linkskurve‘
Fzga
Fusionsmodell, z.B. Bayes-Netz
Errechnung eines Fusionsprofils mit zugehörigem Wahrscheinlichkeitsmaß
Simultanes Auftreten vonDetektionsereignissen erfordertden Entwurf einer geeigneten Struktur für die Signalfusionierung
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
•
=Fahrer
vTSR
prioredTLp
Eventσ
)_(
60_
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
•
=Fahrer
vTSR
priolCurvep
Eventσ
)_(
60_
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
•
=Fahrer
vTSR
priovp
Eventσ
)60_(
60_
Wahrscheinlich-
keitsmaß
Zurückgelegtes Fahrprofil
Fusions-
modell
Folie 31

Verkehrskonzepte der Zukunft Folie 32
Am IAD wurde ein neuartiges Li-Ionen-Batteriesystemfür mobile und stationäre Anwendungen entworfen.
Entwurfskriterien und Aspekte sind:
- Neuer Ansatz eines integrierten Batteriemanagements mit
- Low Cost Microcontroller Steuereinheit (ARM7)- Advanced Cell Balancing (aktives resistives Balancing)- Dynamische SOC/SOH-Bestimmung- Integriertes Alterungsmodell (kalendarisch und zyklisch)
- Battery-Packaging als skalierbarer Ansatz (n-16 Volt-Module)
- Entwurf auf Basis von Li-Tec High-Energy Li-Ionen-Zellen (4x40Ah)
- Langzeittest und Verifikation mithilfe zugehörigem Hybrid-Powernet-Prüfstand (Zertifizierung und Qualitätsabsicherung)
Forschungsvorhaben Elektro-Speicher der ZukunftEntwicklung eines Prototyps mit Li-Ionen-Technologie

Verkehrskonzepte der Zukunft Folie 33
Forschungsvorhaben Elektro-Speicher der ZukunftRealisierung eines Prototyps mit Li-Ionen-Technologie
SchnittstellenDisplay
Batterie-management
Bananen-buchsen
BNC-Buchsen
VerteilerplatineShunt
Zellverbinder
Li-Ionen-Zellen
Batteriepole
CAD-Zeichnung Foto des Prototypen

Verkehrskonzepte der Zukunft Folie 34
Building Vehicle
PhotovoltaicSystem
Wind Energy
PressureAccumulator
Electr. StorageSystem
Advanced Battery
Multi‐valentEnergy Management
Internal combustion engine
GeneratorElectr. Storage
SystemAdvanced Battery
Battery Management
In‐house consumer devices Vehicle traction energy
Docking StationPowerPlug
Quel
le:
Bew
illig
tes
Förd
erpro
jekt
Land S
achse
n,
Sta
rt:
01.0
4.2
010,
Tei
lneh
mer
:EA E
ner
gie
Arc
hitek
tur
Gm
bH
, D
resd
enIn
st.
für
Auto
mobilt
ecnik
–IA
D,
Dre
sden
Folie 34
Forschungsprojekt des Landes SachsenWohnen und Mobilität
Elektrofahrzeug / Fahrzeug mit Elektrotraktion
Smart PowerGrid

Verkehrskonzepte der Zukunft Folie 35Folie 35
Preisverleihungen I/II
Auszeichnung eines gemeinsamen Konzepts der EA, des IAD und der Eisenbahnerwohnungs-genossenschaft Dresden (EWG) zur energetischen Sanierung der „Urbanen Mitte“ des Stadtteiles Dresden Gorbitz durch den Bundesminister für Verkehr, Bau und Stadtentwicklung, Herrn Tiefensee. Teilgenommen hat die EWG am vom Bundesminister für Verkehr, Bau und Stadtentwicklung ausgeschriebenen Wettbewerb „Energetische Sanierung von Großwohnsiedlungen“.
Entgegengenommen hat den Preis Dr. Hesse, hier mit Frau Dr. Mikoleit und Herr Dr. Zweinert (s. Foto).
1. Platz im Wettbewerb„Wohnen und Mobilität mit regenerativer Energie“am 15. Juli 2009
Projektantrag in Zusammenarbeit mit der EA EnergieArchitektur GmbH – Dresden erstellt.

Verkehrskonzepte der Zukunft Folie 36
Preisverleihungen II/II
Mit dem Preis, auch „Kongress-Oscar" genannt, werden Professoren geehrt, die herausragende Kongresse bzw. Tagungen in die Stadt geholt haben. Diese Ehrung wird in vier Kategorien vergeben, die sich nach der Teilnehmerzahl der organisierten Kongresse richten. Die Auswahl der Preisträger erfolgt anhand von festgelegten Bewertungskriterien durch eine hochkarätige Jury. So spielen die Anzahl der gebuchten Übernachtungen und die Organisation des Rahmenprogramms eine wichtige Rolle. Zusätzlich ist entscheidend, inwieweit der Kongress eine nationale, europäische oder außereuropäische Veranstaltung ist und ob diese gezielt nach Dresden geholt worden ist.
Preisträger in Kategorie 1: bis 200 Teilnehmer Herr Prof. Dr.-Ing. Bernard Bäker vom Institut für Automobiltechnik der TU Dresden wurde in der Kategorie für Veranstaltungen bis 200 Kongressteilnehmer, für die 40 Bewerbungen eingingen, ausgewählt.
1. Platz Congress Award Dresdenfür Prof. Bäker zur Ausrichtung der29. Tagung „Elektronik im Kraftfahrzeug – u.a. Elektromobilität“am 16. und 17. Juni 2009 in Dresden
Überreicht durch das Oberbürgermeisteramt unddem Stadtmarketing der Stadt Dresden am 12. November 2009,v.l.: Frau Dr. Böning, Prof. Bäker

Verkehrskonzepte der Zukunft Folie 37
Zusammenfassung
Folie 37
• Darstellung von Ausbaustufen einer Elektromobilität der Zukunft.
• Vorstellung eines elektrifizierten Fahrzeugantriebs mitvorausschauender Steuerung sowie neuartiger el. Energiespeicherzzgl. einer veränderten Energieinfrastruktur mit dezentralen,regenerativer Energieerzeugung.
• Keine eindeutige Lösung einer Elektromobilität der Zukunft, mobileZukunft wird geprägt sein von verschiedensten Mobilitätskonzepten,es werden sich gesellschaftliche Veränderungen einstellen.
• Notwendig wird ein übergreifendes nationales und ggf. globalesEnergiemanagement.
• Bewertungssystem zur Elektromobilität notwendig, mehr Transparenzwann und für welche Anwendung welche Art von Elektromobilität ameffizientesten ist, welche Rahmenbedingungen erfüllt sein müssen,Massentauglichkeit und Nachhaltigkeit essentiell.

Verkehrskonzepte der Zukunft Folie 38
Tagungshinweise
Folie 38
Aktuelle Tagungen in 2010
4. Tagung
„Diagnose in mechatronischen Fahrzeugsystemen“ in DresdenNeue Verfahren für Test, Prüfung und Diagnose von E/E-Systemen im Kfz3. und 4. Mai 2010, IAD-Tagung, Lehrstuhl Fahrzeugmechatronik
30. Tagung – Jubiläumstagung
„Elektronik im Kraftfahrzeug“ in DresdenElektromobilität – Energiebordnetz – E/E-Architektur der Zukunft16. und 17. Juni 2010, Haus der Technik Tagung, Steigenberger Hotel Dresden

Verkehrskonzepte der Zukunft Folie 39
BAB 17Dresden-Südvorstadt
Kontaktdaten des Lehrstuhls
Prof. Dr.-Ing. Bernard BäkerTechnische Universität DresdenFakultät für VerkehrswissenschaftenInstitut für Automobiltechnik (IAD)Lehrstuhl für Fahrzeugmechatronik
Besucheradresse:TU Gelände, Jante Bau, EG, Zimmer 1/2George-Bähr-Straße 1c01062 Dresden
Tel.: +49 (0) 351 / 463 - 34832Fax: +49 (0) 351 / 463 – 32866
Sekretariat: Frau PuschendorfTel.: +49 (0) 351 / 463 - 34180Fax: +49 (0) 351 / 463 - 32866E-Mail: [email protected]
Internet-Seite des Lehrstuhls:http://tu-dresden.de/fzm
KontaktdatenKontaktdaten
Folie 39