Embed Size (px)
Citation preview
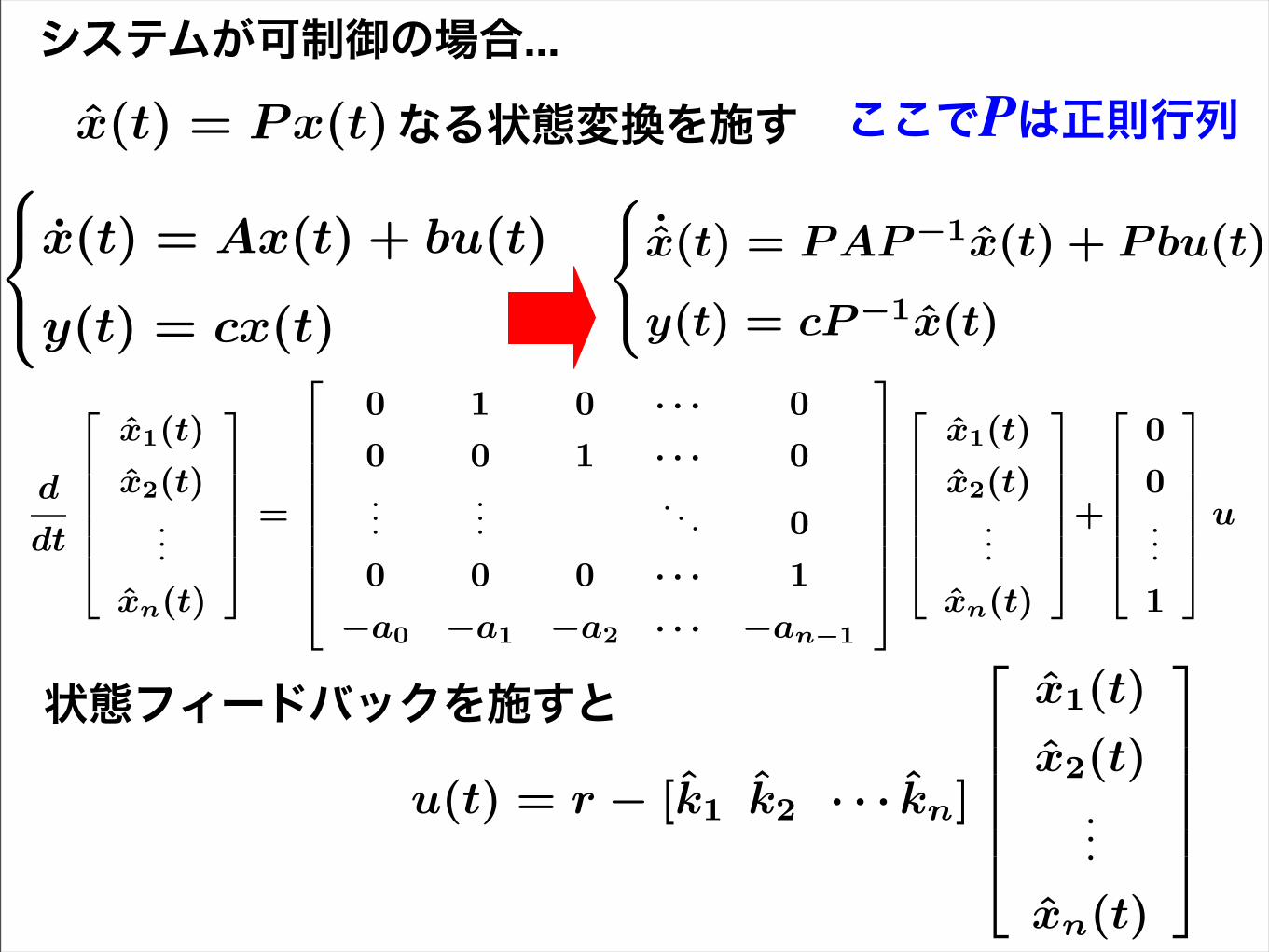
システムが可制御の場合...ここでPは正則行列
状態フィードバックを施すと
d
dt
!
"
"
"
"
#
x1(t)
x2(t).
.
.
xn(t)
$
%
%
%
%
&
=
!
"
"
"
"
"
"
"
#
0 1 0 · · · 0
0 0 1 · · · 0.
.
.
.
.
.
.
.
. 0
0 0 0 · · · 1
!a0 !a1 !a2 · · · !an!1
$
%
%
%
%
%
%
%
&
!
"
"
"
"
#
x1(t)
x2(t).
.
.
xn(t)
$
%
%
%
%
&
+
!
"
"
"
"
#
0
0.
.
.
1
$
%
%
%
%
&
u
u(t) = r ! [k1 k2 · · · kn]
!
"
"
"
"
#
x1(t)
x2(t).
.
.
xn(t)
$
%
%
%
%
&
!
"
#
x(t) = Ax(t) + bu(t)
y(t) = cx(t)
!
"
#
˙x(t) = PAP !1x(t) + Pbu(t)
y(t) = cP !1x(t)
なる状態変換を施すx(t) = Px(t)
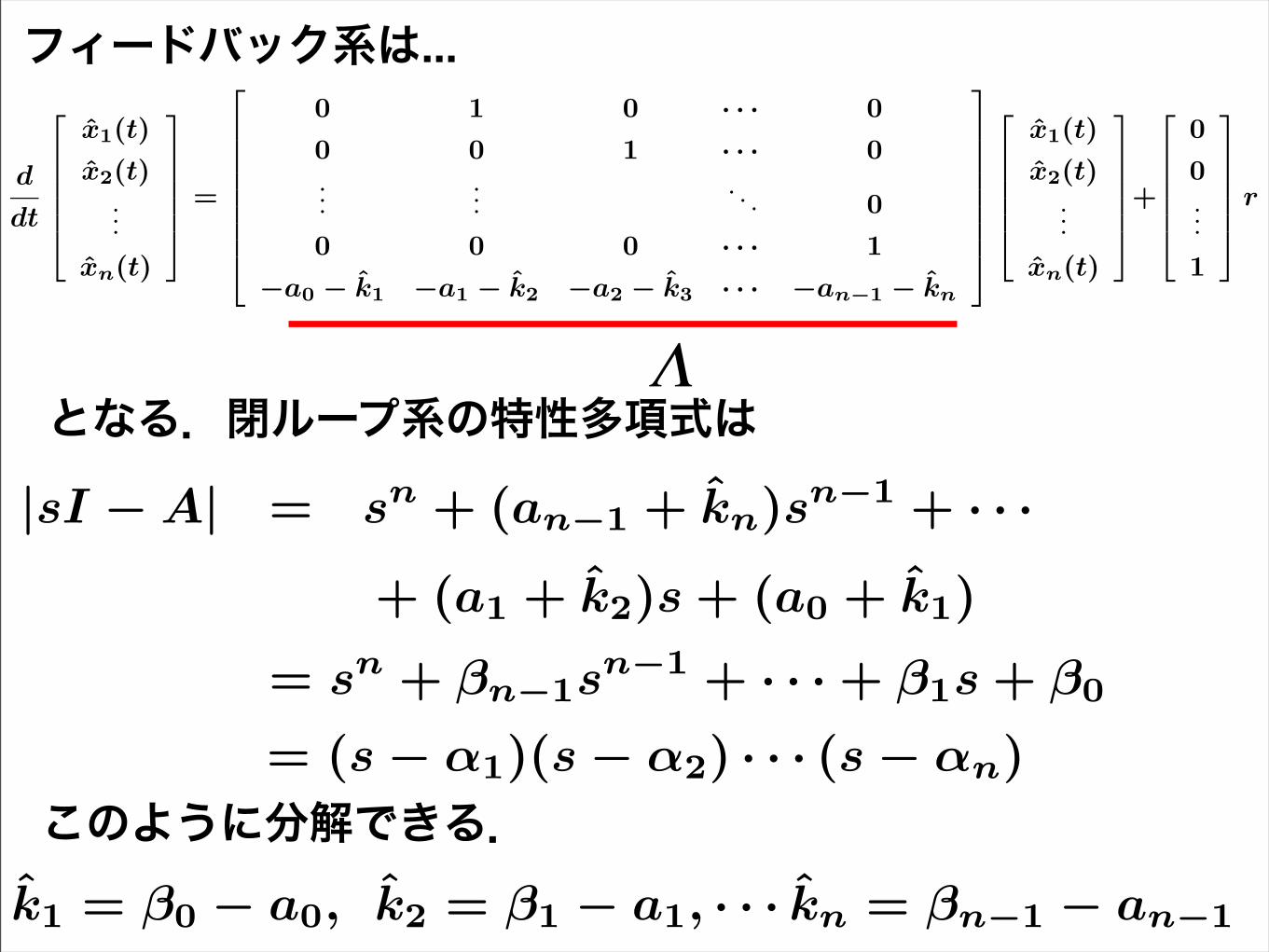
フィードバック系は...
となる.閉ループ系の特性多項式は
このように分解できる.
€
Λ
d
dt
x1(t)
x2(t).
.
.
xn(t)
=
0 1 0 · · · 0
0 0 1 · · · 0.
.
.
.
.
.
.
.
. 0
0 0 0 · · · 1
!a0 ! k1 !a1 ! k2 !a2 ! k3 · · · !an!1 ! kn
x1(t)
x2(t).
.
.
xn(t)
+
0
0.
.
.
1
r
|sI ! A| = sn + (an!1 + kn)sn!1 + · · ·
+ (a1 + k2)s + (a0 + k1)
= sn + !n!1sn!1 + · · · + !1s + !0
= (s ! !1)(s ! !2) · · · (s ! !n)
k1 = !0 − a0, k2 = !1 − a1, · · · kn = !n!1 − an!1
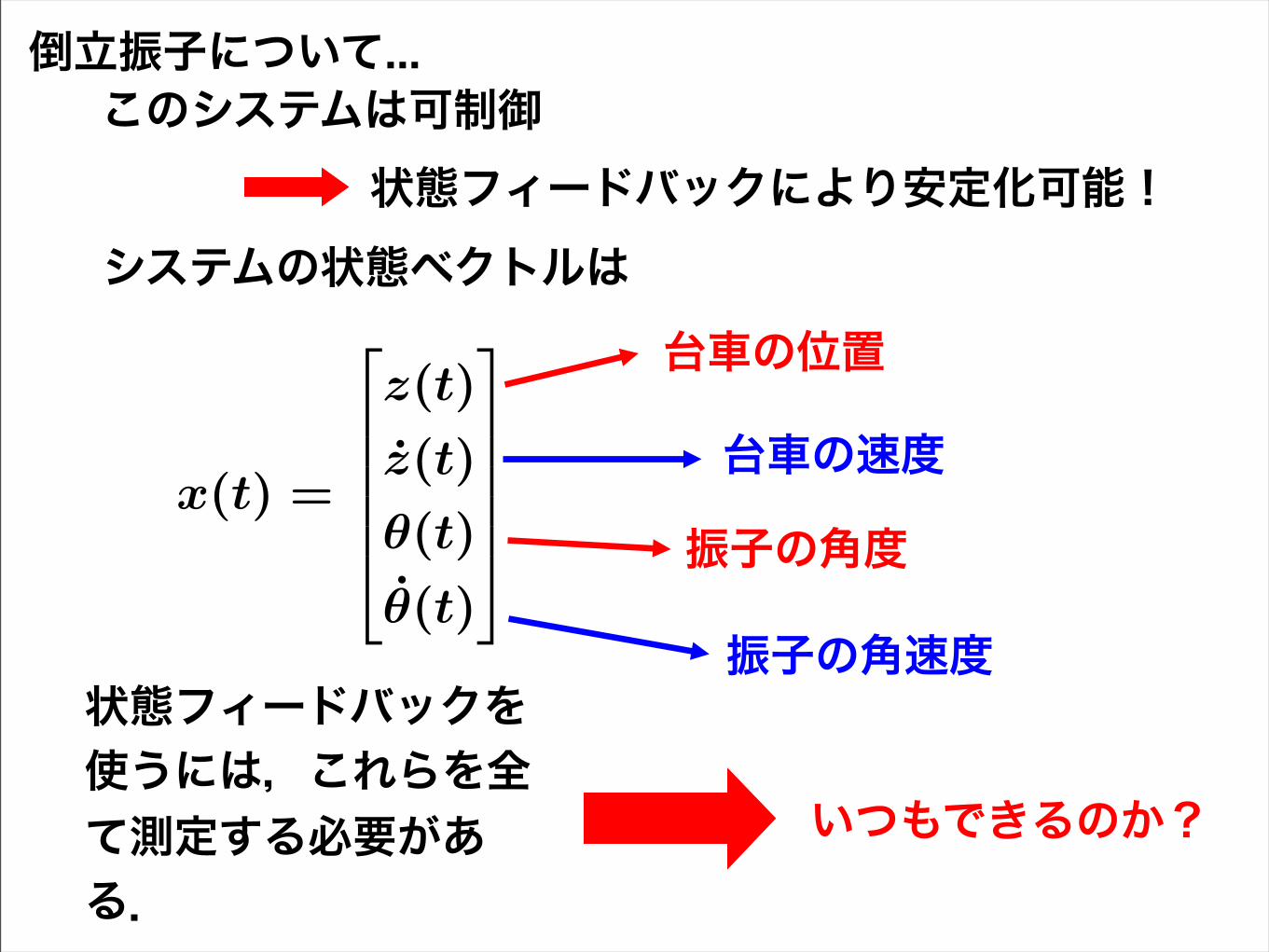
倒立振子について...このシステムは可制御
状態フィードバックにより安定化可能!システムの状態ベクトルは
台車の位置
台車の速度
振子の角度
振子の角速度状態フィードバックを使うには,これらを全て測定する必要がある.
いつもできるのか?
x(t) =
!
"
"
"
"
#
z(t)
z(t)
!(t)
!(t)
$
%
%
%
%
&
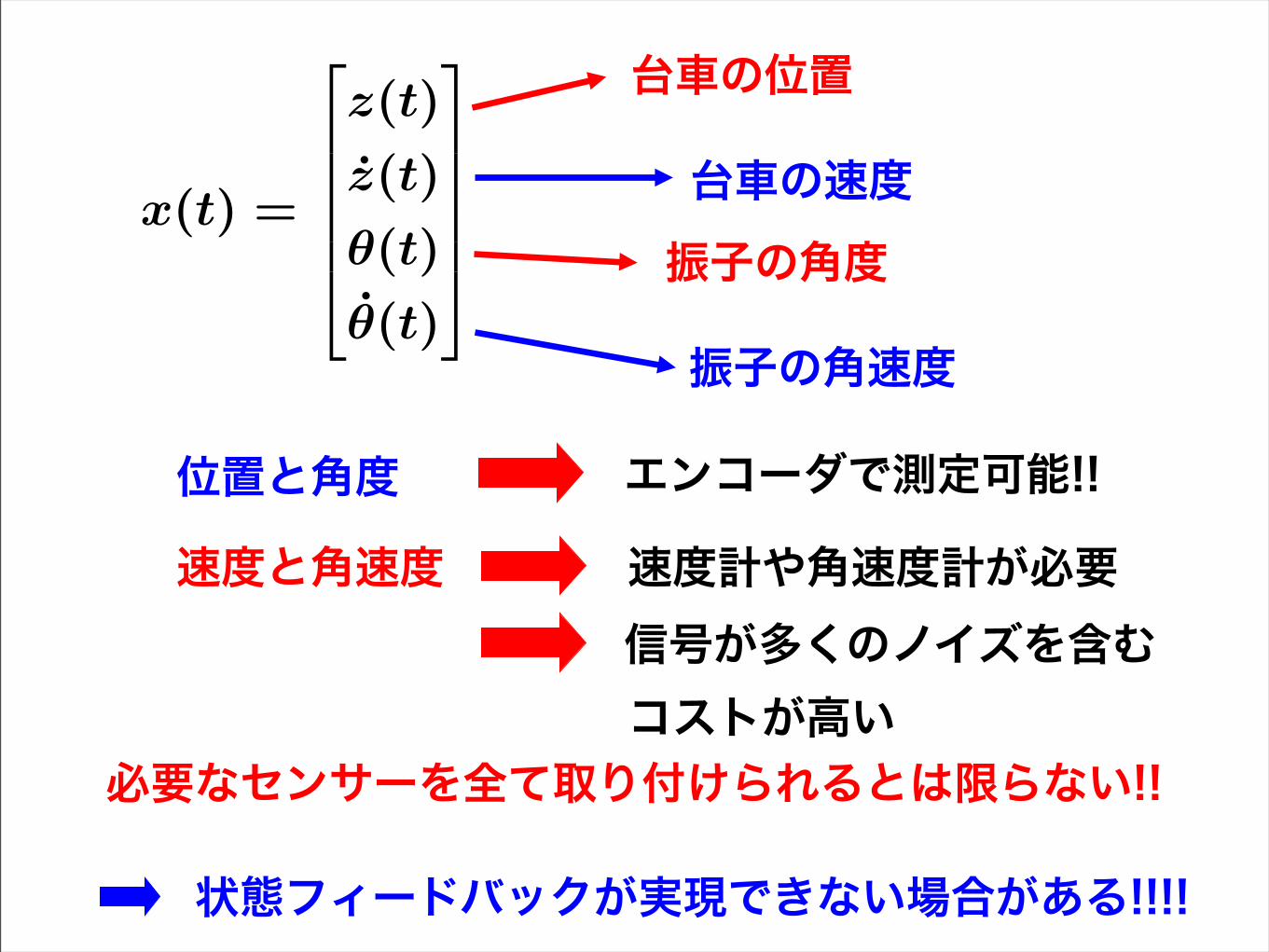
位置と角度 エンコーダで測定可能!!
速度と角速度
必要なセンサーを全て取り付けられるとは限らない!!
状態フィードバックが実現できない場合がある!!!!
速度計や角速度計が必要
コストが高い信号が多くのノイズを含む
台車の位置
台車の速度振子の角度
振子の角速度
x(t) =
!
"
"
"
"
#
z(t)
z(t)
!(t)
!(t)
$
%
%
%
%
&
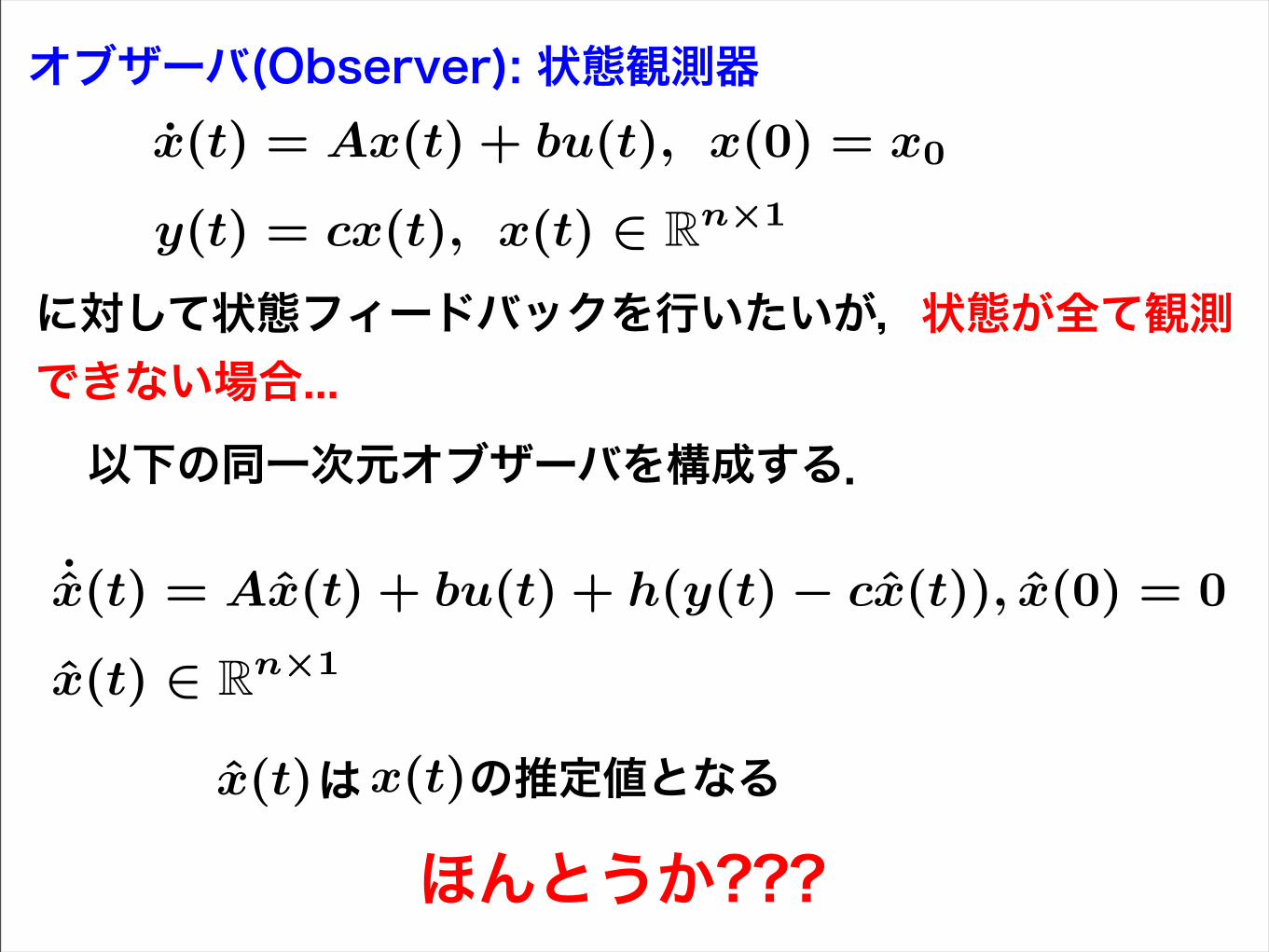
オブザーバ(Observer): 状態観測器
に対して状態フィードバックを行いたいが,状態が全て観測できない場合...以下の同一次元オブザーバを構成する.
ほんとうか???
x(t) = Ax(t) + bu(t), x(0) = x0
y(t) = cx(t), x(t) ∈ Rn!1
˙x(t) = Ax(t) + bu(t) + h(y(t) ! cx(t)), x(0) = 0
x(t) " Rn!1
x(t) x(t)は の推定値となる
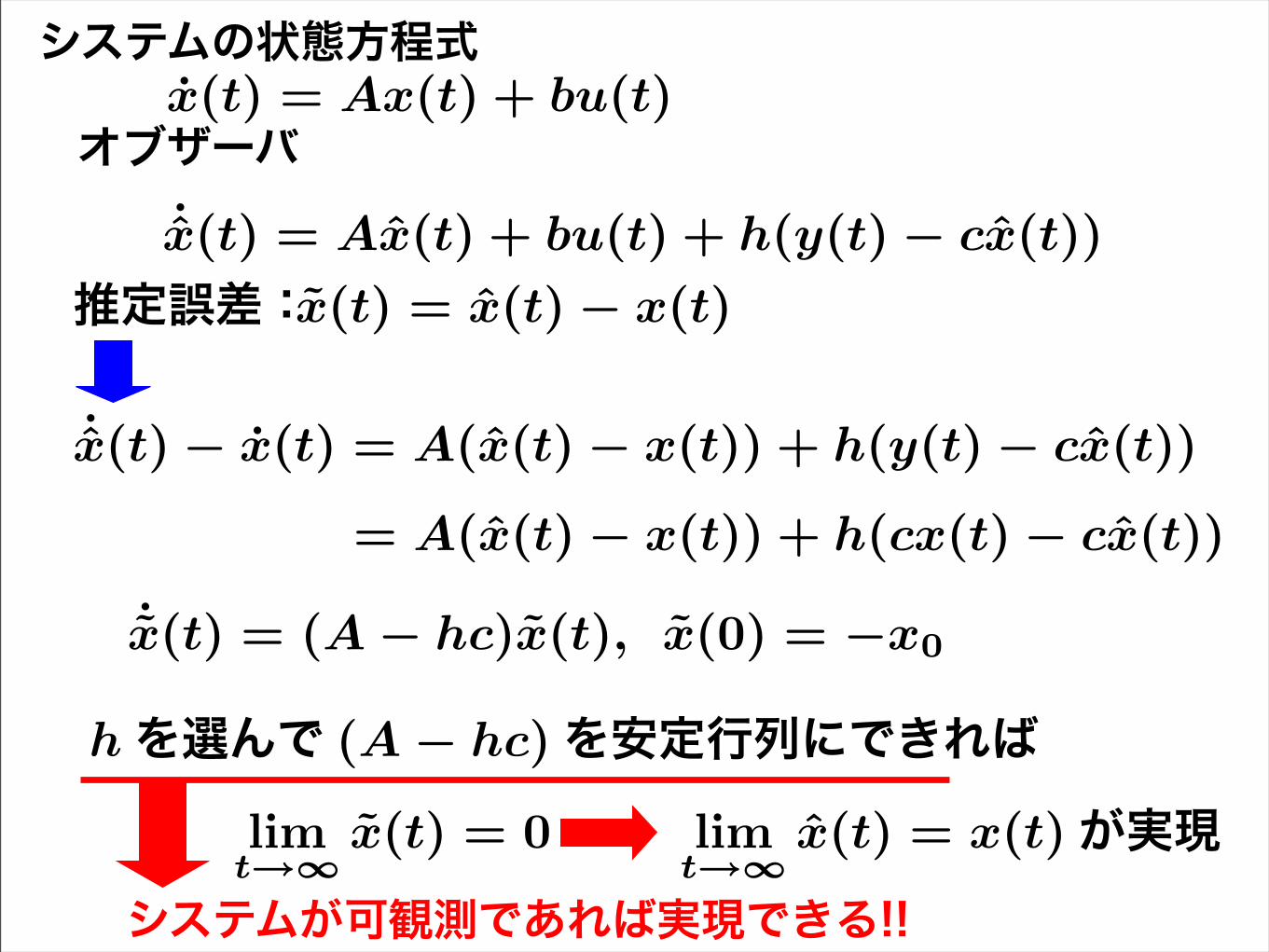
システムの状態方程式
システムが可観測であれば実現できる!!
x(t) = Ax(t) + bu(t)オブザーバ
˙x(t) = Ax(t) + bu(t) + h(y(t) ! cx(t))
推定誤差:x(t) = x(t) ! x(t)
˙x(t) ! x(t) = A(x(t) ! x(t)) + h(y(t) ! cx(t))
= A(x(t) ! x(t)) + h(cx(t) ! cx(t))
˙x(t) = (A ! hc)x(t), x(0) = !x0
hを選んで (A ! hc)を安定行列にできればlim
t!"
x(t) = 0 limt!"
x(t) = x(t)が実現
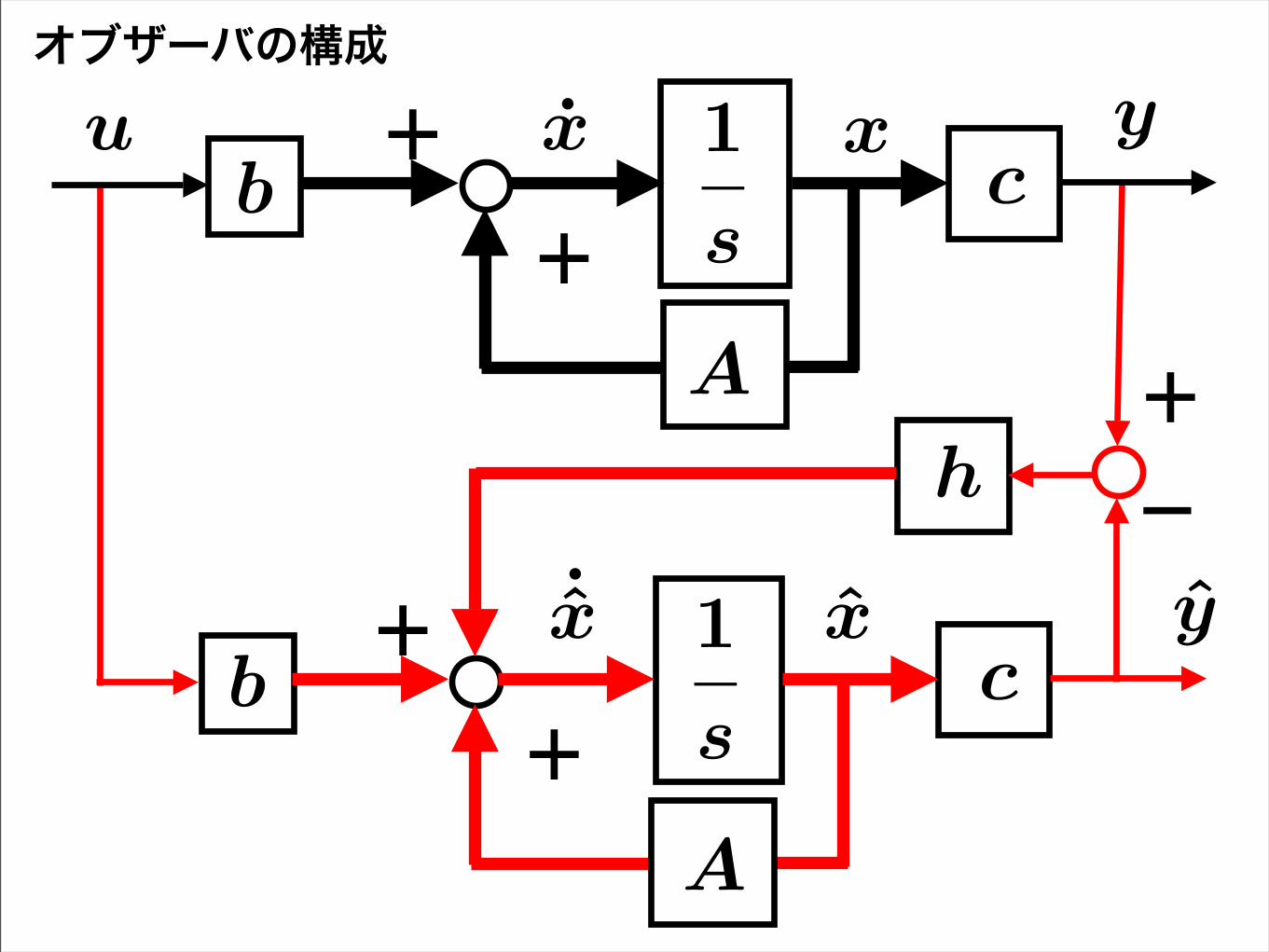
オブザーバの構成
€
+
€
+€
+
€
−
cb1
s
A
˙x x y
h
cb
€
+
€
+A
1
s
x x yu
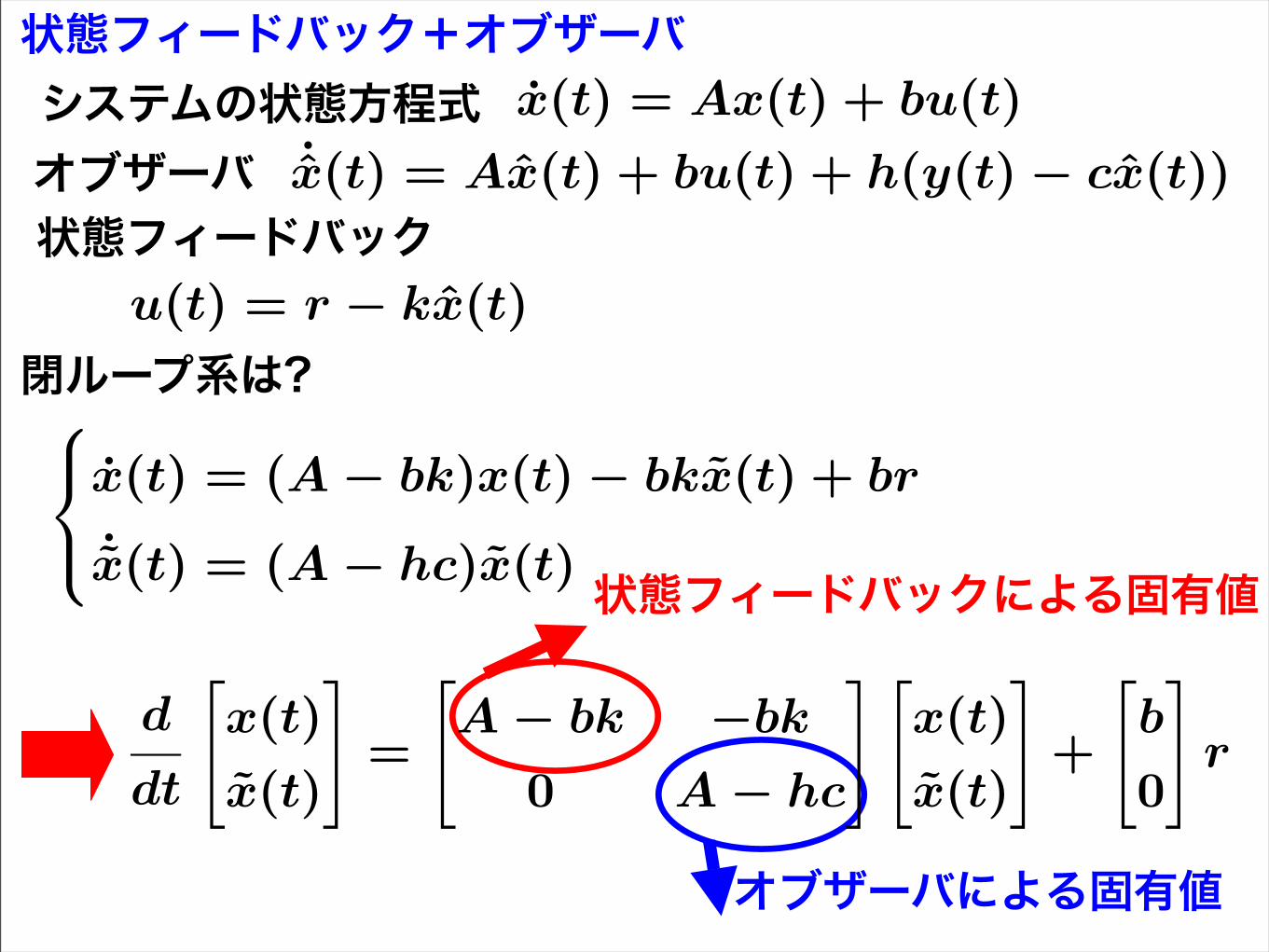
状態フィードバック+オブザーバ
閉ループ系は?
状態フィードバックによる固有値
オブザーバによる固有値
システムの状態方程式 x(t) = Ax(t) + bu(t)
オブザーバ ˙x(t) = Ax(t) + bu(t) + h(y(t) ! cx(t))
状態フィードバックu(t) = r ! kx(t)
!
"
#
x(t) = (A ! bk)x(t) ! bkx(t) + br
˙x(t) = (A ! hc)x(t)
d
dt
!
x(t)
x(t)
"
=
!
A ! bk !bk
0 A ! hc
" !
x(t)
x(t)
"
+
!
b
0
"
r
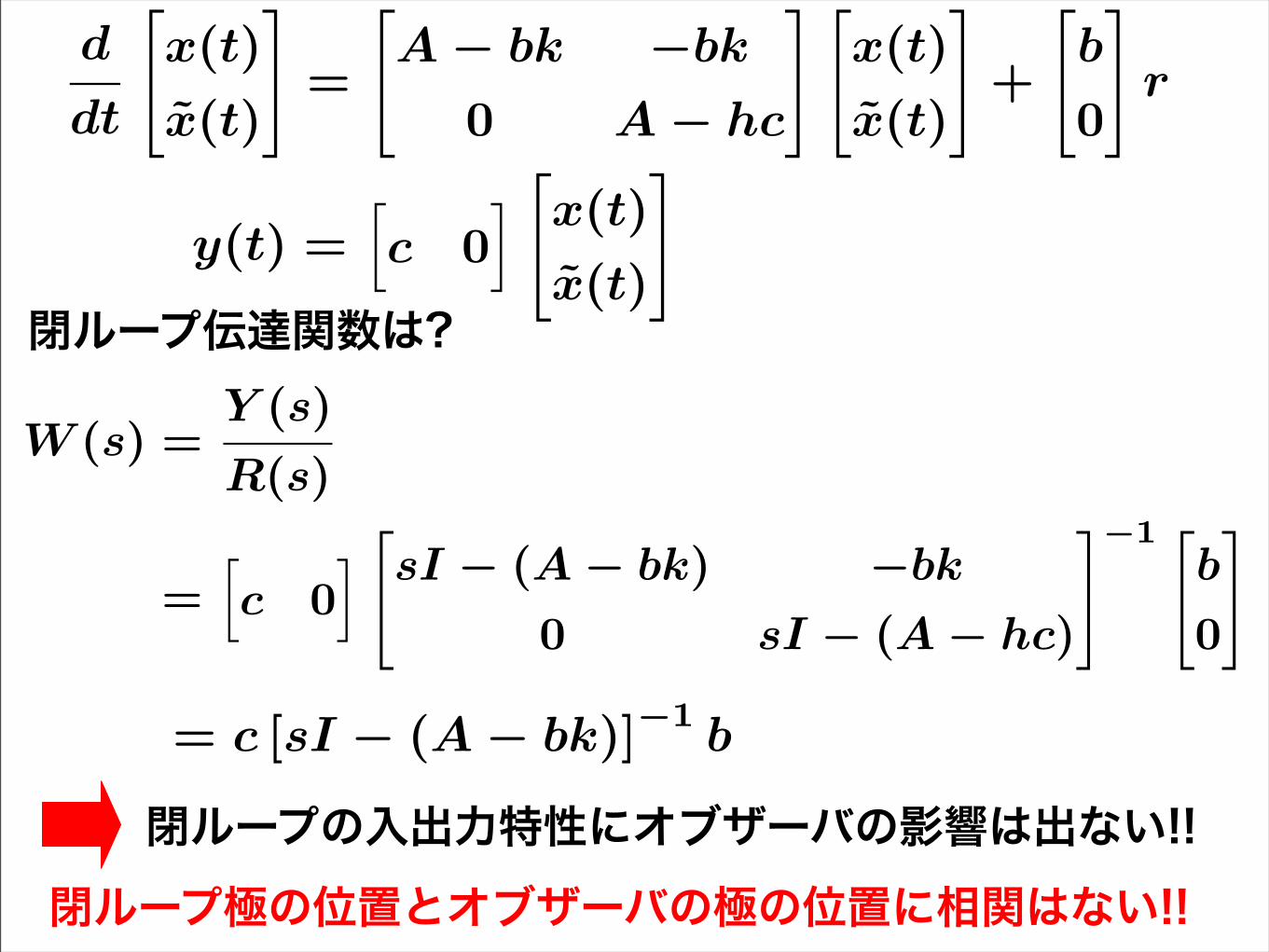
閉ループ伝達関数は?
閉ループの入出力特性にオブザーバの影響は出ない!!閉ループ極の位置とオブザーバの極の位置に相関はない!!
d
dt
!
x(t)
x(t)
"
=
!
A ! bk !bk
0 A ! hc
" !
x(t)
x(t)
"
+
!
b
0
"
r
y(t) =!
c 0"
#
x(t)
x(t)
$
W (s) =Y (s)
R(s)
=!
c 0"
#
sI ! (A ! bk) !bk
0 sI ! (A ! hc)
$
!1 #
b
0
$
= c [sI ! (A ! bk)]!1b
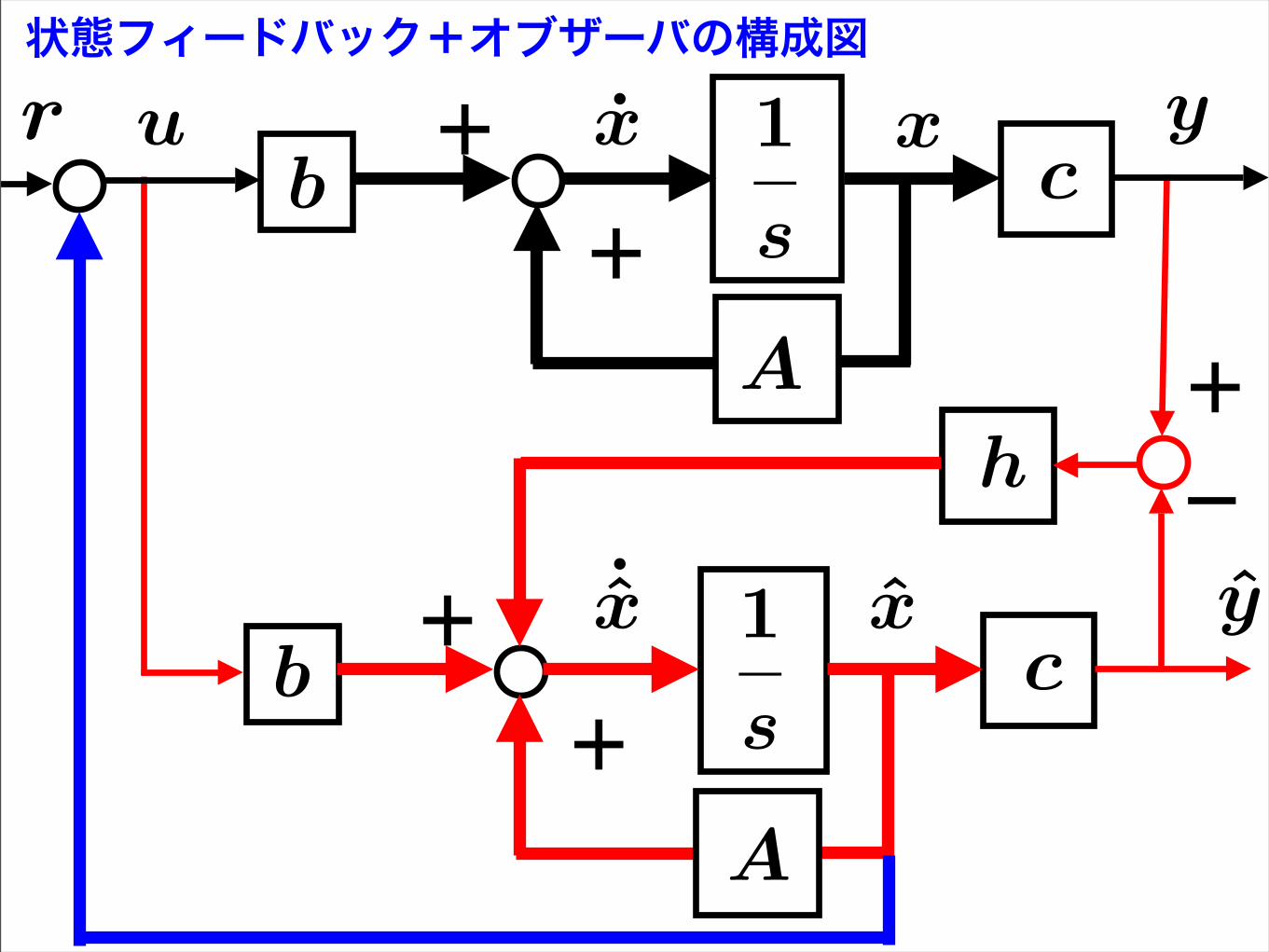
状態フィードバック+オブザーバの構成図
€
+
€
+€
+
€
−
cb1
s
A
˙x x y
h
cb
€
+
€
+A
1
s
x x yur
オブザーバとは...システムの状態がすべて測定できない場合,状態を推定するもの
状態フィードバックとは...システムを安定化するために,入力として状態に適切なゲインを掛けたものを選ぶこと
オブザーバを用いた状態フィードバックの場合...状態フィードバックに用いる状態をオブザーバにより推定する必要がある!!
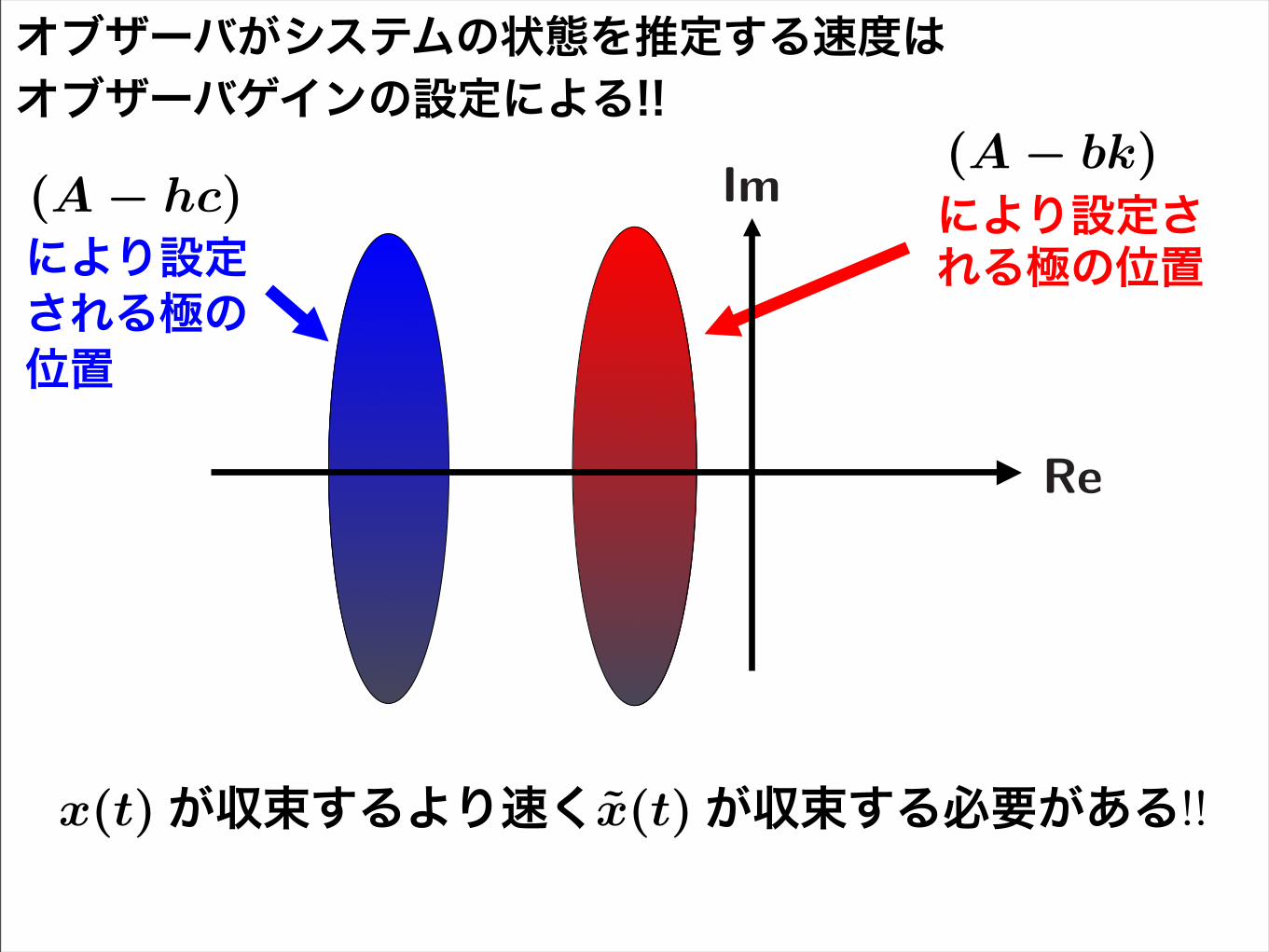
オブザーバがシステムの状態を推定する速度はオブザーバゲインの設定による!!
(A − bk)により設定される極の位置により設定
される極の位置
(A ! hc)
x(t)が収束するより速くx(t)が収束する必要がある!!
Re
Im



![ö ЮwÊ6 M ñ±Ñ/ìX ]§ e',¹Kö¢wÀø:uö·ÿ ¢¼³BÑú jû@Pq ÙfA ¾Æ¡ïÿmR · ö ЮwÊ6 M ñ±Ñ/ìX ]§ e',¹Kö¢wÀø:uö·ÿ ¢¼³BÑú jû@Pq ÙfA ¾Æ¡ïÿmR](https://img.pdfslide.tips/doc/110x75/5ebd5ef4a57ba9449e12d129/-w6-m-x-ekwu-b-jpq-fa-mr.jpg)

![Ý]B ˆâØÛâ - 2018 ˛ò E¯'A ïı…ðVâƒD>tµåV| Oïì…kVì ïk˜D - ‚'«kö 2018 Ö>[JØD EØì 10 ˜>sþ> kz'‚oò˝m 5 ˜>sþ> kò\V“kö kz'A (Ô.5 Øâ˜Ý]uzD](https://img.pdfslide.tips/doc/110x75/60b1126dd18fb34aeb7c356f/b-2018-ea-vd-tv-okv-koed-ak.jpg)








![7 õ ò³xÖ sÝ3ÒEA »×> |8:× }Ò; ² ì EDs-space.snu.ac.kr/bitstream/10371/92157/1/05_루쉰은... · 2019-04-29 · 7 õ ò ³ xÖ sÝ3ÒEA »×> ]ã 7 Ô _ 95 ò³ À² :](https://img.pdfslide.tips/doc/110x75/5ed539ad606e340b7a35ea7f/7-x-s3ea-8-eds-spacesnuackrbitstream1037192157105e.jpg)


![요약.pdf · xÖ ´d k . ³Æt]t u ot ÒÓ¡× z ²³e *): |Ì e /@ ØÙÚªh e ¤ "£1s v* ³Æt]t ©wÛ fn xÖ rt ±e g+  r!2 ®Ü ? {k"£2 y+ e fs Ý Åh c =61d $ $ *) ( 31#](https://img.pdfslide.tips/doc/110x75/604763c2d38e997fae49d285/pdf-x-d-k-tt-u-ot-z-e-oe-e-h-e.jpg)









