ЛЕКЦИЯ 7
ЛИНЕЙНЫЕ ПРОСТРАНСТВА.
ЛИНЕЙНЫЙ И ОРТОГОНАЛЬНЫЙ
ОПЕРАТОР.
ПРЕОБРАЗОВАНИЕ КООРДИНАТ
7.1. Линейные пространства. Базис линейного
пространства..................................................................2
7.2. Линейный оператор: определение, действия над
линейным оператором. Координаты вектора.............6
7.3. Преобразование координат. Изменение матрицы
линейного оператора при переходе к новому базису.
Ортогональный оператор и замена базиса.................8

7.1. ЛИНЕЙНЫЕ ПРОСТРАНСТВА. БАЗИС ЛИНЕЙНОГО
ПРОСТРАНСТВА
В математике существует много объектов, над которыми можно проводить
линейные действия (сложение и умножение на число)- векторы, матрицы,
функции и т.д. (см. ЛЕКЦИЯ 2). Эти действия имеют одинаковые свойства -
коммутативность, ассоциативность, существование нулевого элемента и т.д.
Это позволяет перейти к общему взгляду на линейные действия, которые
выполняются над совокупностью каких-либо элементов и подчиняются
определённым аксиомам. Это взгляд выражается в понятии линейного
пространства.
ОПРЕДЕЛЕНИЕ. Линейным пространством L называется множество
элементов ,...,, zyx , если:
1. Lyx , указан закон (правило) нахождения суммы элементов:
Lzyxz : .
2. RLx , указан закон (правило) нахождения произведения элемента на
число: Lzxxz : .
3. Операции сложения и умножения на число, удовлетворяют аксиомам:
1) xyyx - коммутативность сложения,
2) )()( zyxzyx - ассоциативность сложения,
3) xOxLO : - существование нулевого элемента L0 ,
4) Lx OxxLx )(:)( - существование противоположного элемента
Lx )( ,
5) xxL 1:1 - существование единичного элемента L1 ,
6) xx - ассоциативность умножения на число,
yxyx
xxx
)()8
)()7 - дистрибутивность.
Непосредственно из определения линейного пространства следуют его
свойства.
СВОЙСТВА ЛИНЕЙНОГО ПРОСТРАНСТВА
1. Существует единственный нулевой элемент линейного пространства.
2. Для Lx существует единственный противоположный элемент.
3. OxLx 0: , где LOR ,0 .
4. xxxLx ,)1(: - противоположный элемент.
5. ООО ,:0 - нулевой элемент пространства .
ПРИМЕРЫ ЛИНЕЙНЫХ ПРОСТРАНСТВ:
1. Множество всех вещественных чисел R .
2. Множество всех матриц.
3. Множество всех многочленов RaaxaxaxPxP in
nn
nn ,...)(: 1
10 .

4. ,...3,2,1, nAn - n-мерное пространство арифметических векторов (см.
ЛЕКЦИЯ 2). Элементом этого пространства является любой упорядоченный
набор из ,...3,2,1n вещественных чисел: naaaa ,...,, 21
, где nАa
- вектор
(точка) этого пространства, naaa ,...,, 21 - координаты вектора (точки) nАa
.
5. Множество всех свободных векторов (см. ЛЕКЦИЯ 2, ЗАМЕЧАНИЕ).
ОПРЕДЕЛЕНИЕ. Линейное пространство называется евклидовым Е , если
в нём задано скалярное произведение векторов: определено действие,
сопоставляющее каждым двум векторам Еy,x число yx .
ОПРЕДЕЛЕНИЕ. Длиной (модулем, нормой) вектора Еx называется
число x ( x ), равное корню из квадрата скалярного произведения вектора x :
хххx .
ЗАМЕЧАНИЕ. Тогда операция нормирования вектора (т.е. приведение
длины вектора к 1) : х
хx0 .
Ранее (см. ЛЕКЦИЯ 4) было введено понятие линейной зависимости и
независимости арифметических векторов. Аналогично можно ввести
понятие линейной зависимости (независимости) обобщённых векторов
(точек, элементов) линейного пространства L :
ОПРЕДЕЛЕНИЕ. Совокупность векторов Laaa n ,...,, 21 называется
линейно независимой, если их линейная комбинация
Raaa inn ,...2211 равна нулю только при 0...21 n .
ПРИМЕР 1.Рассмотрим P -линейное пространство многочленов 2-й степени
RaaxaxaxPxP i ,)(: 21
2
022 .
Совокупность его элементов (обобщённых векторов) 2x , x , 1 является
линейно независимой.
Действительно, рассмотрим их линейную комбинацию:
132
2
1 xx .
Очевидно, что
001 32132
2
1 xx .
ОПРЕДЕЛЕНИЕ. Совокупность векторов Laaa n ,...,, 21 называется
линейно зависимой, если существует хотя бы одно nii ,..,1:0 , при
котором их линейная комбинация равна нулю:

0...2211 nnaaa niii ,..,1,0: .
ПРИМЕР 2. Рассмотрим P -линейное пространство многочленов 2-й степени
RaaxaxaxPxP i ,)(: 21
2
022 .
Совокупность его элементов (обобщённых векторов) 2x , x , 1 является
линейно независимой - см. ПРИМЕР 1.
Рассмотрим совокупность 32 2 x , 2x , x , 1 и докажем, что она линейно
зависима.
Рассмотрим их линейную комбинацию:
1)32( 43
2
2
2
1 xxx ,
01)32( 43
2
2
2
1 xxx
при
14321 3,0,02 ,
например, при
3,0,2,1 4321 .
Значит элементы 32 2 x , 2x , x , 1 - линейно зависимы.
Понятие линейной зависимости (независимости) векторов является одним из
основополагающих понятий курса линейной алгебры и позволяет дать
определение размерности и базиса линейного пространства.
ОПРЕДЕЛЕНИЕ. Линейное пространство L называется n - мерным, если
в нём существует n линейно независимых векторов, а любые (n+1) векторов
являются линейно зависимыми. Обозначение: nL ( nL ).
Число n называется размерностью линейного пространства nL : nLn dim .
ПРИМЕР 3. Пространство P многочленов RaaxaxaxPxP i ,)(: 21
2
022
является 3-х мерным: 3dim P - см. ПРИМЕР 1 и ПРИМЕР 2.
ОПРЕДЕЛЕНИЕ. Базисом n-мерного линейного пространства L
называется любая упорядоченная совокупность (система) n линейно
независимых векторов этого пространства.
ЗАМЕЧАНИЕ. 1)Если базис состоит из конечного числа векторов, то
пространство - конечномерно.
2) Если для Nm найдётся m линейно независимых векторов этого
пространства, то это пространство называется бесконечномерным.

ПРИМЕР 4. Совокупность 2x , x ,1 является базисом пространства P
многочленов RaaxaxaxPxP i ,)(: 21
2
022 .
ПРИМЕР 5. 1) Рассмотрим любые три некомпланарных вектора в 3R ,
например 1,1,1 p
, 1,3,0q
, 1,0,2r
- они линейно независимы и являются
базисом в 3R .
Для доказательства этого факта составим линейную комбинацию этих
векторов rqp321
и найдём, что 00321 irqp
:
0)1,0,2()1,3,0()1,1,1( 321321 rqp
.
Эта запись равносильна однородной системе уравнений:
0
03
02
321
21
3
1
.
Посчитаем определитель этой системы:
05
111
031
201
,
значит эта система имеет единственное решение - тривиальное, т.е. 0321 .
Если мы рассмотрим систему из 4-х векторов 1,1,1 p
, 1,3,0q
, 1,0,2r
,
4,5,8 s
, то она будет уже линейно зависимой и вектор 4,5,8 s
можно
выразить через базисные вектора 1,1,1 p
, 1,3,0q
, 1,0,2r
. Для этого
нужно найти значения rqpsi
321:0 или решить равносильную
этой записи систему линейных уравнений
4
53
82
321
21
31
.
Решением этой системы было найдено ранее (см. ЛЕКЦИЯ 5, ПРИМЕР 4):
3
1
2
3
2
1
.
2) Рассмотрим любые два неколлинеарных вектора в 2R , например
1,0p
, 0,1q
- они линейно независимы и являются базисом в 2R .
3) Рассмотрим любой ненулевой вектор в R , например 3p
- он является
базисом в R .

7.2. ЛИНЕЙНЫЙ ОПЕРАТОР: ОПРЕДЕЛЕНИЕ, ДЕЙСТВИЯ
НАД ЛИНЕЙНЫМ ОПЕРАТОРОМ. КООРДИНАТЫ
ВЕКТОРА
В математике много примеров, когда под действием некоторого
преобразования (например, один объект (прообраз) переходит в другой
(образ), сохраняя при этом линейные действия над изменённым объектом
(прообразом).
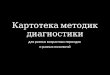
Рассмотрим поворот всех векторов вокруг начала координат на некоторый
угол .Обозначим это преобразование буквой , тогда каждому вектору х
будет соответствовать его образ - вектор х
. При этом хх
)( , а если
21 ххх
, то 2121 )( ххххх
.
РИС.1.Образ вектора суммы: 2121 )( ххххх
.
Перейдём к определению линейного оператора, действующего в некотором
линейном пространстве L .
ОПРЕДЕЛЕНИЕ. В пространстве L задан линейный оператор , если
установлено правило (задан закон), по которому каждому вектору Lх
сопоставляется вполне определённый (единственный) вектор Lуху : ,
при этом выполнено:
2121 )( хххх ,
Rхх ,)( .
ТЕОРЕМА. Если Leee n ,...,, 21 -базис линейного (n-мерного) пространства L ,
то для Lx существует единственная система чисел nххх ,...,, 21 , такая что
nneхeхeхх ...2211 .
Доказательство.

По определению линейного пространства (см. п. 7.1.) для Lx
совокупность из (n+1) векторов neeeх ,...,,, 21 является линейно зависимой, т.е.
nххх ,...,, 21 , не все равные нулю, такие что
nneхeхeхх ...2211 .
Предположим, что nххх ,...,, 21 :
nneхeхeхх ...2211 .
Тогда
nneхeхeх ...2211 = nneхeхeх ...2211 ,
0)(...)()( 222111 nnn eххeххeхх .
Так как вектора neee ,...,, 21 линейно независимы (см. определение базиса
п.7.1.) , то ,,...,0,00)(...)()( 2211222111 nnnnn ххххххeххeххeхх
.,...,, 2211 nn хххххх
Теорема доказана.
ОПРЕДЕЛЕНИЕ. Выражение nneхeхeхх ...2211 будем называть
разложением вектора x по базису neee ,...,, 21 . Коэффициенты iх будем
называть координатами вектора х в этом базисе.
Рассмотрим образ вектора х : ху . Он также является вектором , а
совокупность из (n+1) векторов neeeу ,...,,, 21 является линейно зависимой, т.е.
Rууу n ,...,, 21 , не все равные нулю, такие что
nneуeуeуу ...2211 .
Теперь применим оператор непосредственно к вектору х :
....
)(...)()()...(
2211
22112211
nn
nnnn
exexex
eхeхeхeхeхeхху
Так как Leee n ,...,, 21 , то вектора Leee n ,...,, 21 , а значит могут быть
разложенными по базису neee ,...,, 21 :
.,...,2,1,...2211 nkeaeaeae nnkkkk
Таким образом мы получаем, что
nneуeуeу ...2211 = nn exexex ...2211 ,
т.е.
....
,...
,...
2211
222211222
122111111
nnnnnnn
nn
nn
eaeaeaeу
eaeaeaeу
eaeaeaeу
В матричном виде эта запись выглядит следующим образом:

nnnnn
n
n
nx
x
x
aaa
aaa
aaa
у
у
у
2
1
21
22221
11211
2
1
..
........
..
..
или XAY ,
где
nу
у
у
Y
2
1
-столбец координат вектора ху ,
nnnn
n
n
aaa
aaa
aaa
А
..
........
..
..
21
22221
11211
-матрица оператора ,
nx
x
x
Х2
1
-столбец координат вектора х .
ЗАМЕЧАНИЕ. 1)Отметим, что при применении одного и того же
оператора к различным наборам базисных векторов, мы будем получать
различные матрицы этого оператора.
2) Линейный оператор , матрица A которого невырожденная, называется
невырожденным оператором.
7.3. ПРЕОБРАЗОВАНИЕ КООРДИНАТ. ИЗМЕНЕНИЕ
МАТРИЦЫ ЛИНЕНОГО ОПЕРАТОРА ПРИ ПЕРЕХОДЕ К
НОВОМУ БАЗИСУ. ОРТОГОНАЛЬНЫЙ ОПЕРАТОР И
ЗАМЕНА БАЗИСА
7.3.1. ПРЕОБРАЗОВАНИЕ КООРДИНАТ
В предыдущем пункте мы отмечали (см. ЗАМЕЧАНИЕ), что матрица
оператора зависит от выбранного базиса - у одного и того же оператора в
разных базисах будут разные матрицы. Далее мы рассмотрим вопрос о том,
как будут меняться координаты некоторого вектора при переходе от одного
базиса к другому.
Фиксируем в некотором линейном n-мерном пространстве L два различных
базиса:
neee ,...,, 21 ,
neee ,...,, 21 .

Рассмотрим вектор Lx и его разложение по данным базисам:
nneхeхeхх ...2211 ,
nneхeхeхх ...2211 .
Каждый базисный вектор neee ,...,, 21 разложим по базису neee ,...,, 21 :
nn etetete 12211111 ... ,
nn etetete 22221122 ... ,
...
nnnnnn etetete ...2211 .
Подставим полученные разложения: nneхeхeхх ...2211
nnnnnnnnnn etetetхetetetхetetetх ............ 22112222112212211111
nnnnnnnnnn eхtхtхteхtхtхtехtхtхt ............ 22112222212111212111 .
Учитывая, что
nneхeхeхх ...2211 ,
получим:
....
,...
,...
2211
22221212
12121111
nnnnnn
n
nn
хtхtхtх
хtхtхtх
хtхtхtх
В матричном виде эта запись выглядит следующим образом:
nnnnn
n
n
n x
x
x
ttt
ttt
ttt
х
х
х
2
1
21
22221
11211
2
1
..
........
..
..
или ХТХ ,
где
nх
х
х
Х2
1
- столбец координат вектора x в базисе neee ,...,, 21 ,
nnnn
n
n
ttt
ttt
ttt
Т
..
........
..
..
21
22221
11211
- матрица перехода от базиса neee ,...,, 21 к базису neee ,...,, 21 ,
nх
х
х
Х2
1
- столбец координат вектора x в базисе neee ,...,, 21 .
ЗАМЕЧАНИЕ. 1) Отметим, что

nnnn
n
n
ttt
ttt
ttt
Т
..
........
..
..
21
22221
11211
- матрица перехода от базиса neee ,...,, 21 к базису neee ,...,, 21 , составляется из
столбцов координат векторов базиса neee ,...,, 21 в базисе neee ,...,, 21 .
2) Матрица перехода от одного базиса к другому является невырожденной.
3) Любую невырожденную матрицу порядка n можно рассматривать как
матрицу перехода от одного базиса к другому в n -мерном пространстве.
4)Так как матрица перехода от одного базиса к другому невырожденная, то у
неё существует обратная матрица и можно выразить координаты в "новом"
базисе neee ,...,, 21 через координаты в "старом" базисе neee ,...,, 21 :
ХТХ 1 .
ПРИМЕР 5. Рассмотрим преобразование поворота на некоторый угол в
плоскости Oxy . Найдём матрицу этого преобразования.
Формулы связи "новых" и "старых" координат:
11
11
cossin
sincos
yxy
yхх
или
1
1
cossin
sincos
y
x
y
x
,
cossin
sincosT ,
тогда нетрудно найти
cossin
sincos1T и
yxy
yхх
cossin
sincos
1
1.
7.3.2. ИЗМЕНЕНИЕ МАТРИЦЫ ЛИНЕЙНОГО ОПЕРАТОРА ПРИ
ПЕРЕХОДЕ К НОВОМУ БАЗИСУ. ОРТОГОНАЛЬНЫЙ ОПЕРАТОР И
ЗАМЕНА БАЗИСА
Рассмотрим:
оператор в некотором n-мерном линейном пространстве L ,
neee
,...,, 21 - базис этого пространства,
А - матрица оператора XAY : ,
neee
,...,, 21 - новый базис пространства L ,
T - матрица перехода от базиса neee
,...,, 21 к базису neee
,...,, 21 : ХТХ ,
YТY . Покажем, как изменится матрица оператора при переходе в базис
neee
,...,, 21 .

Для этого рассмотрим равенство
YTXTAXAY ,
откуда YTXTA ,
YTTXTAT 11 , YYEXTAT 1 ,
XAXTATY 1 ,
где
TATА 1 - матрица оператора в новом базисе neee
,...,, 21 .
ОПРЕДЕЛЕНИЕ. Матрица A называется подобной матрице В , если
существует невырожденная матрица С , такая что СВСА 1 .
ЗАМЕЧАНИЕ. Матрицы оператора при переходе от одного базиса к
другому - подобные: матрица А подобна матрице A (где TATА 1 , T -
матрица перехода от базиса neee
,...,, 21 к базису neee
,...,, 21 ).
ОПРЕДЕЛЕНИЕ. Квадратная матрица A называется ортогональной,
если её транспонированная матрица равна обратной: 1 AAT .
Ортогональной матрице отвечает ортогональный оператор.
ЗАМЕЧАНИЕ. 1)Определитель ортогональной матрицы всегда равен 1 .
2) Ортогональный оператор переводит один ортонормированный базис
(вектора этого базиса попарно перпендикулярны и имеют единичную длину)
в другой ортонормированный базис.
Recommended