INSTITUTO DE EDUCACIÓN SUPERIOR TECNOLÓGICO,,NUEVA
ESPERANZA"
SITABUS DE FUNDAMENTOS DE ROBOTTCA
SISTEMAS DE POTENCIA Y AUTOMATIZACIóN
FUNDAMENTOS DE ROBOTICA.
03 CREDITOS
IV,
04 HORAS SEMANATES/72 HORAS SEMESTRALES
28-08-77 Al t8-t2-17 .
CARLOS ALBERTO VENTURA TANTALEÁN
www.istene.edu.pe
L SUMtttA
La Robótica es una cienc¡a o rama de la tecnologÍa, que estudia el diseño y construcción demáquinas capaces de desempeñar tareas realizadas por el ser humano o que requieren del uso deintel¡gencia también estudia las aplicaciones de los robots.
En la actualidad, los robots comerciales e ¡ndustriales son ampliamente utilizados, y realizan tareasde forma exacta o más barata que los humanos.
Un robot, es un agente artíficial mecánico o virtual. Es una máquina usada para realizar un trabajoautomáticamente y que es controlada por una computadora.
Aplicaciones de la Robót¡ca.
La Robót¡ca médica pretende compatibilizar el cirujano con el robot para mejorarlosprocedim¡entos quirúrgicos como:
. Los robots para terapias de rehabilitación.
. Robots para almacenaje y distribución de medicamentos.
Robót¡ca en la Industr¡a. En la actualidad, los robots ofrecen ventajas en las líneas de producción,ya que mantienen una constante comunicac¡ón con dispos¡tivos que están a su alrededor, ypermiten llevar un mon¡toreo constante de lo que hace el robot las 24 horas del día, lo que losvuelve altamente seguros y confiables.
Robót¡ca en la Agr¡cultura. En Ia actualidad, estos pequeños robots sólo realizan tareas debúsqueda y transmisión de información sobre el terreno de una forma totalmente nueva en elsector agrícola.
Robót¡ca en el espacio. La exploración espacial posee problemas especiales para el uso de robots.El medio ambiente es hostil para el ser humano, quien requiere un equipo de protección muycostoso tanto en la T¡erra como en el Espacio.
Ventajas y Desventajas de la Robótica. La robótica es una tecnología moderna y hoy en día lamayoría de las cosas que se están automatizando con la ayuda de robots.
El desempeño por la sustitución humana por robots ha sído mayor que el empleo que esta hacreado.
DATOS GENERAI.
1.1. FAMILIAPROFESIONAL
1.2. CARRERAPROFESIONAL
1.3. MODUTOPROFESIONAL
1.4. UNIDAD DIDACTICA
1.5. CRED|TOS
1.6. SEMESTREACADEMICO
1.7. HORARTO
1.8. FECHA DE REALIZACIÓN
1.9. DOCENTERESPONSABLE
1.10. CORREO ELECTRONICO
1.11. PAGINA WEB
ELECTRÓN ICA - ELECTROTECNIA
ELECTRÓNICA INDUSTRIAL
nffo DE EOI'C¡CION S UPERIORIECNOLóGIOO PÚBLICO
"¡YUEVA IEtrER¡,I{ZA'
MElqtFPPáU.E§

INSTITUTO DE EDUCACIÓN SUPERIOR TECNOLÓGICO PÚBUCO,.NUEVA ESPERANZA"
II. UNIDAD DE COMPETENCIA VINCULADA At MODULO
ptáh¡Ícar, diseñar, ensamblar, programar, realizar y supervisar el manten¡miento de sistemaselectrónicos de potenc¡a y automat¡zac¡ón.
III. CAPACIDAD DE LA UNIDAD DIDACTICA
Analizar y aplicar las técnicas ¡nherentes al desarrollo de los proced¡mientos de mantenimiento enlos sistemas de control de potencia y automatizac¡ón.
Manejar la robótica y programar a través de software de simulación el entrenamiento en robóticaindustrial RoboCell, para desarrollar proyectos industriales.
Anal¡zar, programar tareas en un s¡stema Robótico industrial Robocell, para el desarrollo deproyectos industriales.
IV. INDICADORES DE TOGRO
COMPETENCIA PARA EMPLEABITIDAD
En esta un¡dad se contribuirá en el desarrollo en las s¡guientes competencias de empleabilidad:
Pos¡bil¡tan al egresado su incorporación al mundo laboral o desarrollar procesos product¡vosindepend¡entes, de acuerdo con sus ¡ntereses profesionales o las necesidades en su entorno social.
Analiza las relaciones entre dos o más variables de un proceso social o natural para determ¡nar oestimar su comportamiento.
Hace explíc¡tas las nociones c¡entíf¡cas que sustentan los procesos para la solución de problemascotid¡anos.
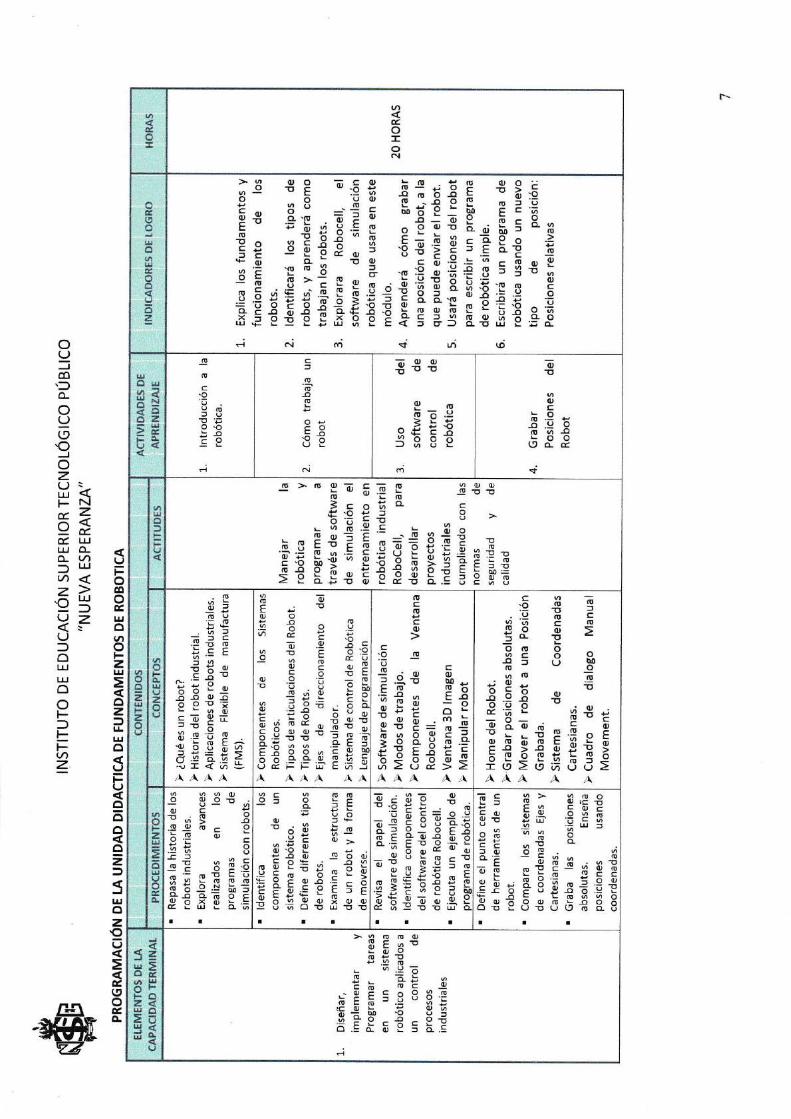
1. Explica los fundamentos y funcionamiento de los robots.2. ldentif¡cará los t¡pos de robots, y aprenderá como trabajan los robots.3. Explorara Robocell, el software de simulación robót¡ca que usara en este módulo.4. Aprenderá cómo grabar una posición del robot, a la que puede enviar el robot.5. Usará posiciones del robot para escr¡b¡r un programa de robótica simple.6. Escribirá un programa de robótica usando un nuevo tipo de posición: Posiciones relativas
1. Usará herramientas de programación que permiten crear programas fáciles de entender ymantener, además de darle una útil herramienta de revisión.
2. Usará un Proyecto Al¡near Bloques para resolver de forma independiente un problema derobótica.
3. Trabajará con componentes adicionales de la celda de trabajo - alimentadores y templates enun proceso de Producción.
4. Aprenderá como usar el robot junto con accesorios del robot, conocidos como periféricos.5. Utiliza periféricos para la realización de un proyecto con base deslizante lineal.6. Utiliza LEGO COMO una herram¡enta robótica. Aprende sobre sus componentes. Genera
tácticas de resolución de ejercicios cada vez más compl
2

INSTITUTO DE EDUCACIÓN SUPERIOR TECNOLÓGICO PÚBLICO,,NUEVA
ESPERANZA"
VI. ACTIVIDADES DE APRENDIZAJE
L. D¡señar,
¡mplementar yProgramartareas en uns¡stemarobóticoapl¡cados a uncontrol deprocesos
industria les
1, lntroducc¡ón a la
robótica.
! ¿Qué es un robot?i Historia del robot industr¡al.> Aplicaciones de robots
industriales.> Sistema Flexible de manufactura
Semana 02
04-09-17
2, Cómo trabaja unrobot.
> Componentes de los SistemasRobót¡cos.
, Tlpos de articulaciones del Robot.> Tipos de Robots.> Ejes de direccionamiento del
manipulador,> Sistema de control de Robótica
04 HORAS
3. Uso del softwarede control derobót¡ca.
> Software de simuleción> Modos de trabajo,> Componentes de la Ventaná
Robocell.> Ventana 3D lmag€n
Semana 03
7L-09-174. Grabar Pos¡clones
del Robot.
! Home del Robot,! Grabar posiciones absolutas.! Mover el robot a una Posición
Grebada.l Sistema de Coordenadas
Cartesianas.! Cuadro de dialogo Manual
Movement,
04 HORAS
Programación deuna tarea s¡mplede Coger y Dejar.
> Comandos Record y Teach.I Mover un cubo grabando 4
Poslc¡ones.
} Herramientas de programación.> Programaclón y Ejecuc¡ón de un
i Posiciones Absolutas y Relativas,; Uso de Posiciones Relatives,t Opciones Env¡ar Robot a Objeto.
Semanas
/FecháElementos de
capacldadContenldos Báslcos
Número deHoras
Semana 0128-Oa"t7
04 HORAS
Semana 0418-09-17
04 HORAS
Semana 05
25-O9-77
6. PosicionesAbsolutas y
Relativas.04 HORAS
&NSE
iEd
INSTITUTO DE EDUCACIÓN SUPERIOR TECNOLÓGICO PÚBLICO,,NUEVA ESPERANZA,,
Sémanás
/Fécha
Elementos decapacidad
Act¡v¡dades deaprend¡zaje
Conten¡dos BásicosNúmero de
Horas
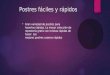
Semana 06o2-ro-L7
Diseñar,¡mplementar yapl¡cartécn¡casavanzadas dela
Programaciónrobótica.
7. Herramientasbásicas deprogramaciónrobótica.
; Estructura del Programa Robocell.> comando Remark (RE).
> comando Set Variable (sV).
> Herramientas de Rev¡sión yRetardos
04 HORAS
Semana 0709-10-17
8. Proyecto Al¡nearbloques.
> Definir Tarea del Proyecto:Alinear bloques,
I Grabar Posiciones.) Programaclón,> Ejecución y Evaluación del
Programa
04 HORAS
Semana 08
L6-tO-L79. Alimentadores y
Plantillas.
> Alimentador y Plantillas> Uso de Alimentadores y Plantillas
en un Proceso de Producción.> Definición de la Tarea
04 HORAS
Semana 0923-r0-r7
Semana 10
30-10-1710. Périféricos.
> Entorno de Trabajo del Robot.> Periféricos. Uso de una Mesa
G¡ratoria para amontonarCilindros.
! Mejora de la Ef¡cienc¡a del
Programa,
08 HORAS
Sémana 11
06-11-17Semana 12
73-Ll-L7
11. Proyecto conBase Lineal.
> Definición de la Tarea del
Proyecto. Base Lineal.> Grabar Pos¡ciones para el Robot y
Perifér¡cos.
08 HORAS
Semana 13
2A-1L-17
12. conociendo el
Robot LEGo
¡, Control de roles a desempeñar en
el equipo.)> Base [V]otriz. Manual de
lnstrucciones de construcción.Robot educador 04 HORAS
13. Mov¡miento,Tanque y motorgrande
> lnteracción con el software LEGO
M!NDSToRMS Education EV3.
> Estructura y la programación del
robot
Semana 14
27-u-77
14. Movimiento,dirección y motorgran de
> Programa el movimiento del
robot mediante instrucciones> Diferencia en la Rotación de
grados de una rueda y la rotaciónde grados del robot sobre la pista.
> Diferenc¡a entre rotar, g¡rar ydoblar 04 HORAS
Robot ba¡larín
> Herramientas de salida, (Motorgrande, Mover la dirección yMover tanque).
> Programa el robot para que siga
la coreografía para bailar al ritmode una canción. Rutinas.
Semana 15
o4-72-77L6. Condiciones
L Sensores de contacto (sensor
táctil) y distancia (ultrasón¡co).
> PÍograma una simulación de una
asp¡radora intel¡gente.
04 HORAS
4

{uNS rNsrrruroDEEDUcAcróNi?$li"^1,;i:NoLóGrcoPúBLrco
Semana L6
L7-12-7717. Detectando
cambios
F Opción "View y Paleta decomunicac¡ón",
FSensor de color. condición deesperar por sensor de color.
04 HORAS
Semana 17
78-12-L7
18, Casos
i Ensamblaje de, modelo "TankBot".
i Robot segu¡dor de línea negra04 HORAS
19. ReforestacióniSensor de color en la opción
Comparar-intensidad de luzreflejada
VII. RECURSOS DIDACTICOS
7.1. Materiales Educat¡vos :
> Pizarra acrílica y Plumones.
> Libros y rev¡stas especializadas.
) Módulos de Fundamentos de Robótica.
> Computadoras Personales de Laboratorio de Koica.
7.2. Medios impresos :
> Separatas: Análisis e identificación de un s¡stema robótico.
> Separatas: Programación de tareas en un sistema robótico
7.3. Los medios visuales :
> Proyector Multimedía.
> Video Conferencias.
) Herramientas de software para la creación y visualización de documentos.Este módulo secentra en Robocell, un software de simulación de robótica con modelos en 3D-sólidos, elcual permite a los estudiantes que amplÍen sus destrezas de programación a través de a
var¡edad de células de trabajo de robótica simuladas.
> Herramientas de Software deTrabajo: RoboCell.
VIII. METODOLOGíA
En el desarrollo de la unidad didáctica se utilizará:
8.1. El Método de Proyecto permite a los alumnos, el dominío de una serie de técnicas y deconocimientos que les pos¡bilita una mejor adaptación a los aprendizajes esperados. Para eldesarrollo este método se crearán las condiciones necesarias.
8.2. El Método de los cuatro pasos. Con este método el alumno adquiere el dominio de unprocedimiento, por que emp¡eza como observador para terminar ejecutando las operac¡onescon la supervisión del profesor. En su ejecución, se aplicará la tácn¡ca de la interrogación y dela demostración.
Se tendrá en cuenta los conoc¡mientos previos de los alumnos, en el inicio de cada sesión deaprendizaje.
IX. €VALUACIÓN
9.1. Requ¡s¡tos de aprobación:
¡ La asistenc¡a mínima 70%.

&NSB
B3t
INSTITUTO DE EDUCACIÓN SUPERIOR TECNOLÓGICO PIJBUCO,.NUEVA ESPERANZA"
. La nota mín¡ma aprobatoria para cada capacidad terminal es trece 13) en escalavigesimal (0 - 20).
. El estudiante que obtenga \0, tt, !2 al finalizar la capacidad terminal tiene derecho a
recuperación. Dicha recuperación se realizará inmediatamente después de finalizada la
capac¡dad terminal.
. Si ai finalizar la unidad d¡dáctica, obtuviera notas de tO, LL ó LZ en alguna capacidadterminal, pasará a una segunda etapa de recuperación a cargo de un jurado.
. Si después de está recuperac¡ón obtiene nota menor a 13 rep¡te la unidad didáctica.
. En todos los casos si el estudiante obt¡ene una nota menor a L0 repite la unidaddidáctica.
Aspectos a evaluar
La evaluación comprenderá los siguientes aspectos:
> Procedimental
> Conceptual
> Actitud inal
Promed¡o de la capacidad terminal.
Suma de notas promedio de criter¡os de evaluaciónPCT
9.2.
9.3.
Número de criterios de evaluación
9.4. NOTA FINAI. DE TA UNIDAD DIDACTICA
Es la que corresponde a la última capacidad terminal.
X. FUENTES DE INFORMACION
10.1. BIBTIOGRAFIATEXTUAT
L0.2. Virtual: Direcciones útiles de lnternet
http://cf ievalladol¡d2.net/tecno/cyr_01/robotica/index.htmhttp://www. ro botica ed u cativa. co m/sitio/m od u les/news/http://www.s u pe rrobot¡ca. com/http://www.tod orobot. com. a r/
La Esperanza, agosto de 2017
AUTOR TITUTO DE OBRA EDITORIAT
SENA Análisis e identificación de un sistema robótico.SENA Programación de tareas en un sistema robótico.
".9 ".
reda\t/ozano
ELECTRONICA IND.
DOCENTE
lJ--_------_J---ZMag. Ca rlos Ventura Tantaleán
É,
¡ Io
o(,o
o
oo
6z
>3 *P 6.Fg E3;6P *9r€-- ;§ -E: gI-€Ég i:,9É; ;t¡§Íü EtÉl;rs;-r;: nsa -i -ttÉrtii-H*É rÉ iɧ€ É E É f +s ri s E.eÉ
!,iñ
O ¡¡J
Eaaz
'H=o-Lr{
!
'6
.j
.o;
ñ
9,!
"EEgIOOo
i-9_q!
r¡)c
-o .9 I(ro-d
oezFz
ofEt-
lt >n ol[ -,I3 c oü o' cq:gE; 3 .
=;H9.E :.-úo;nii3;Fnr*ÉEE'os€$ü5ü,8ÉE-g¡-:c:rsÉgÉ+EÉ#{3E5Eúi
oF
z
.9¿-G a
;I.r:Yoog-o'iEE Ptr:"o;i.so9eSet>:u¡<i75
.E*oü\^ttE¡ ü E 6:s! o 6 .É9
Q . o:, 3 9 :Eñ;O .: ;i
P J s-o 6 á; '¡=: ; o oóPccrore;-EYqq'E=-.:FXooú8999ñ;o.ao{i;!
.l ,.\ ,.\ ,\ .,\ ,\
c
:9!{;, -ó^É --" üxÜEE :ETe E=I-o';-óqE?> o o-x r!.=,=!cY!:ctsbtbla¿\)É,>¿AAA A,.\
cq.^ lO 1!
-!2 ñ cgo d sio E -o.! o -_3E ,q 3,
;* Px -o
€3é *.",f B: ENE+P'j..E^gE#X*EEixfüiü#3,1
=,A,A A ,A ,A
oF.z
=6oÉ,
o 0J on-o;E .E@o@- O:.s 6 :.ei 3o: 3 Ét*;3: E HE E I ! ü=!+ -O O 6 O Ée iú i o-;
.9Eo
*b!
oi E; Í1 5 -9E.ó!! ",ü= ! e E E e-;É E É! ! E ¡*¡E;&a;
19 u i 6 -E- o !! ¿E -:6 q==¡ ¡i 't-!9=ío3'^ó'ii9;oCYdü:'6EU'a
q>. 900!l 9rr!E,A EBEg: iü 3
69
se F- E g Pg H; ^ 5 s-qEú!¡6.e g
(J'6u(,6o,ü
i:r
'6p
ór i
sá,r, E
oFz<¿úu.l <
úE!4-
, t :-- ;i-ü E c i 6 q.
E E K 5.q " BE'F.9 i, .6 3 q;!.o-o-o;ó.E i b I 5 A.E
.j
o(J=co.:fo-oU(9
JozHKFNt4:/dd. u)HS 3= 'J,r Et¡, á ;-rz) É-ñ uJ oYl Éa)? ur{r- OUt^)o
hiizl¡,1
!!=a\otsz1- t¡,rFO
FfJecloó=:)
t¡to.2 o
IJ
=É(o
tqP-*úlE *w

oE
oT
oz
'oÉ.F E E >.8E* ! ie cI,3Eü EE= i3o3 P !e uü e á!;EFE ?'5" É¡o-: *.
iFE*!¡..E - S .se;EÉEs*9¿5 s :s-;$"t€E,E*E*E,e5 g ¿ á.9 E + É g 3 E 3E E
.iñ
E-g
e
NozÉ
{F.
!
Ei,
gbEq
ct-e
,E
o
d
oez¡.?o
FF
6 gE 3 F -E¡:6úe!i6 _11 L rD ^.1.!o o.ó 9 iEc_.áE3,:6 v{ !40
üEI+ 5+á ._e ¿,.-E:EFñg\!Y!6El! :;:EE,E*.Éi+
oI
zo
X dE úE v> ca
_ o{r 1,.9 E,H
! o-9 h á
:3 E P . F.g!.o E !a.É ¡J;óo.9ZoEú E (J v:.'r >;\ i\.\ .\
d;!ó
1,¡
hí(¡)16 o;;
';:i>x ^-'f<!.:!ü:i'üh
.E I +jj ü; F¡?oÁi!o;ioó o"'É ü & ¡=á.\ ..\ .\ .\
Fz¿
oÉ.
otroq)1' r¡) _ l¡.g>!Eo.¡qr
6Es- .é,"E; H. ¡iFé or é.ó X 6i¿;u,;críü: b! P 6 E ri9HEicE-9-E*Eü*5E"Eá'áÉá
do.ú
3 b'QI r.cta!¡vaú9E Y'9 E
; e.P gE d. d 9.: F É.96-o-.gEbE-ah I3t 9 F<o-otr!o-ó
a1HEoFz<B3q<üt
'E ,.
.j9 ü E !!6E!O6,:¿';i
= O c ú.OáESeEEñ
-üe:v+(JHoE EdI o tsadE; >
r.ri
Sp-c .i.: di
'ú;E'; ü!d<É
(!j
<f .co 19o
.P H !*s E,EF>ü üil-! o 4 in- 9Y f, ! >:ó o o c*Í..,,8:3€óf¡jñoocLOt;;l!otioL:Éc >.= L 6¡ h¡
sS§#§É
> ci-q¿ :9
E ÉH H
o írxxr-, a¿ ; E:t ptt. ,EüEc ó* í)'=
s* e áio-É3o-
c: I 1!'b -E : EEe " *¡
!9;>. .l!>Y.á
s É_ " B:'E '," ui É tr
a X § ^9 g g
i3HÉ.q§e*
99 |!COYX o0r'Ú.0!oJ'-.EFE§On €::q b
i leÉ; ¿
= go:o;
!? q .E :.^.= ! o
!ETr"€s
o()=cO.fo(JIa.JozHKr-N'- z.éÍd LrJLrJ o-cL (/):) r-J.J(^<7>§5HT(JlolJlt¡JooFftF.z
ú

trol>,coóo;v'3 -o ilo EEü:8,..9'3SE =EEe
:."9ú.=o:0.6§o! 9=y X.ni*s -;.ép.sÉeli; uEa ;ij tg.t¡:É- ,¡e€Esg[§$* gE" #E=-uSEEEnü!9Ut=3 á _Eo E.ó."F
€ g á* r * E gi + ü ;¡ s§ r; ¡ r É s E ü it ¡ ,lE
s§
,Ea
o;ci
:
j
o(,
o
o
,q
ñ
o= o trE
:;! ú6<fdEó
U IIE ¡E aic^ >9 e
*x.E .Y
-'E r 6 uú'; d : -
,-l9d
Y 'io6!69-*Pqb!E¿l(,U>dA;\A
6EP;id
.E Yon et I B stoo-coúcÉ
ü E .-= q.E'ñibqj.i!
;9E B 5ü; ts r,: o!o0rrouO r,, o: ó_oU_otD:uo
o,b 6 -ssE9-gxc!cEsA^1.1 ! .o o'o -
c J I E: e 3if'o!occ:E i;;i¡sáisflüre¡
uo.l-;di;6d
y i o.o i o,:ó!!tPo d (, áü ú !Fé
iuqooi¡r
. o E c€ " EoF.!teoE!gE "g€Pe*1= e.E;Es.:
0J:
.90"6-EcEáE= ! o-o i.Y o 9 oEEP9=iojbo b: c a 5 < a.:6- o o
oIJco.=o-o(J(9oJozHKr-Nñ<YúÉ. tJ-ttJJ o-o- r/)I LJ.J
U\<z)§3?r(JloLUL¡JóoFfLt--z
o\

>.:oo>E
.9 io
óo
>'¡
!!H
¡o E(, .!¿
úr
:9",oaízÁ
o o E >;i L'
q.§ X Y o a,:otÉ_f!¡".
; 6 < 0¡=:
T:BE*!J-E"i3.ce.5iqIi gEEEJf;;Eo íi5ñob:rro --;ü:L-oéIriü.EE*"9i5;.,\ .,\ .\
-'l! !+- E :E!.Eis 3"Me-.5 -3SEg
.*- iI;E: : s + E q,E E:ó'úxf!6-¡!
ig*ÉE3tE8E €.ógES
rieu¡iE;;- 6 H *q ss
! E § B,e ! i g 3íB*-ES¿HiE:;,*ñrEe9O=>dJÉ!?r!dO(J¿i!d rr.li -c -o'B
Éió>b -e -s g
;:ii¡§ +I,; E
* t; ; s s i; x r.l:' g
.¡ e! ' - 9.9 q F
*:5gf t+ §"8 gf& 3o*€ g ü <'á.-E
" 5
§*-s É
- XE Eó ó: !!
É E: E¡O :tr!E! - ¿ - 5dOa='iOcE,Ú! E E hf!ú-6o¡'j
* r, P ; Pl¡:JOE;To,Eo.ro-q]
o(J=dl.Da-oI(9oJozHKr-N
E#d t¡lt¡J dcL (,I lat(r<z>.e5?rUf,oLrJ
L¡JooF)EFvtz
tiir.w

.9
.9
d
,9
E
oñ od
:9
o;
Uq :95
E*
ó9Hg .!e
.9 ¿= i * É
"o :q _o
d 3g
d:EF o>Eo,o
'óÉ!4,6^o6 ü or.ó
qÍ
Eq)ñ:",.==3.E-=-
E 3 -e-
6!
EEo.ñ 9
6 o:
4!o!:oür!
HEH iE:i ssP§¿s ;ii,p **ra x go ,-): ¡ o",ú@oE .=..s-:=.e,,8H..:s:q .X-:¡o¿-8.-Yo
É; sáBEI;E§é É
i: r.
!4. ct; i: o ob.e.*;g'6;:- d u E
',qEt-'EE!.!aoóú:3 Ei! o É-' c o 9 ñ -ooF--iúoiE.s5¡EE
'4!.o -.o;5 I r'ó ó'; - E ! o.d ¡ .-- .!t ¡n
ooÚ - !..1 -or ; í i:'
E :orr-s6;!! PEgE1 *pEEEs2^adFXXr=b ! E +E q ó- - q:o;rooorr!6f
E.o_o .iE o=E 3.o 3 g E
g , l? ."-i ü o 9'o á
c.-r!úú:o9; -. X-q-a-.FFBO - Ét ; É .o Eei E r b q E * r
oU=ff¡'la-os¿(9.oJozHKFN-¿.EfÉ, u,J¡.r¡ O-o- /)I u.¡o<2>E53r(J:)oLUtuóoFlFFrnz
Recommended