
§4.7 由系统函数零、极点分布决定时域特性
• 序言• H(s) 零、极点与 h(t) 波形特征• H(s) 、 E(s) 的极点分布与自由响
应、强迫响应特性的对应

一.序言 冲激响应 h(t) 与系统函数 H(s) 从时域和变换域两方面表征了同一系统的本性。 在 s域分析中,借助系统函数在 s平面零点与极点分布的研究,可以简明、直观地给出系统响应的许多规律。系统的时域、频域特性集中地以其系统函数的零、极点分布表现出来。 主要优点:1 .可以预言系统的时域特性;
2 .便于划分系统的各个分量 (自由/强迫,瞬态/稳态);3 .可以用来说明系统的正弦稳态特性。

二. H(s)零、极点与 h(t)波形特征的对应
)()())((
)()())((
)(
)()(
21
21
nk
mj
pspspsps
zszszszsK
sB
sAsH
K
系统函数的零点
, 21 nzzz
系统函数的极点
, 21 nppp
在 s 平面上,画出 H(s) 的零极点图: 极点:用×表示,零点:用○表示
m
jjzs
1
)(
n
kkps
1
)(
1 .系统函数的零、极点

例 4-7-1
)2j)(2j()1(
)1j1)(1j1()(
2
sss
ssssH
极点: ,121 pp
零点: 4z
j
0
j1
j1
2j
2j
1
画出零极点图:
,2j3 p 2j4 p
,01 z ,1j12 z ,1j13 z

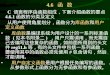
2. H(s)极点分布与原函数的对应关系
j
Oα α
0jω
0jω
几种典型情况

一阶极点在原点,0,
1)( 1 ps
sH )()]([)( 1 tusHLth
apas
sH
1,1
)(
,0),(e)(, ,0
),(e)(, ,0
指数增加在右实轴上
指数衰减在左实轴上
atutha
tuthaat
at
在虚轴上,j,)( 122ωp
ωs
ωsH
)(sin)( ,等幅振荡tωtuth
,)(
)(22 ωαs
ωsH
共轭根,j,j 21 αpωαp
当 ,极点在左半平面,衰减振荡当 ,极点在右半平面,增幅振荡
0α0α

二阶极点,,
1)(
2极点在原点
ssH )(,),()( thtttuth
极点在实轴上,,)(
1)(
2assH
0)(,,0),(e)( thtαtutth t
在虚轴上,,)(
2)( 222 ωs
ssH
增幅振荡 )(,),(sin)( thtttutth ,t
)(sH 有实际物理意义的物理系统都是因果系统,即随 , 这表明的极点位于左半平面,由此可知,收敛域包括虚轴, 均存在,两者可通用,只需 将即可。
)(jFsF 和js
0th

三 .H(s) 、 E(s) 的极点分布与自由响应、强迫响应特性的对应
激励: )()( sEte
v
kk
u
ll
Ps
zssE
1
1
)(
)()(
系统函数: )()( sHth
n
ii
m
jj
Ps
zs
sH
1
1
)(
)(
)(
响应: )()( sRtr
n
ii
m
jj
ps
zs
1
1
)(
)(
v
k k
k
ps
A
1
)()( 1 sRLtr
自由响应分量 +强制响应分量
v
kk
u
ll
Ps
zs
1
1
)(
)()(sR
n
i i
i
ps
A
1
)(sR
v
k
tpk tuA k
1
)(e
n
i
tpi tuA i
1
)(e

几点认识
•自由响应的极点只由系统本身的特性所决定,与激励函数的形式无关,然而系数 都有关。
sEsHAA ki ,, 与
•响应函数 r(t) 由两部分组成:系统函数的极点自由响应分量;激励函数的极点强迫响应分量。
•定义系统行列式(特征方程)的根为系统的固有频率(或称“自然频率”、“自由频率”)。H(s) 的极点都是系统的固有频率;H(s) 零、极点相消时,某些固有频率将丢失。

暂态响应和稳态响应
瞬态响应:是指激励信号接入以后,完全响应中瞬时出现的有关成分,随着 t增大,将消失。稳态响应=完全响应-瞬态响应左半平面的极点产生的函数项和瞬态响应对应。

例 4-7-2 ,教材习题 2-6(1)给定系统微分方程 te
t
tetr
t
tr
t
tr3
d
d2
d
d3
d
d2
2
20,10 / rrtute ,起始状态为激励
试分别求它们的完全响应,并指出其零输入响应,零状态响应,自由响应,强迫响应各分量,暂态响应分量和稳态响应分量。
sEessE
sRrssRrsrsRs
30
203002
解:方程两端取拉氏变换

零输入响应/零状态响应
03003232 rrsrsEssRss
则 23
03002zi
ss
rrsrsR
23
32zs
ss
sEssR
0 e3e4)( 2zi ttr tt
:即零状态响应为)0( 5.1e2e5.0)( 2
zs ttr tt
:零输入响应为

稳态响应/暂态响应,自由响应/强迫响应
s
sR1
5.12
15.2
1
12
ss
)0( e5.2 e2 2 ttt
极点位于 s左半平面
5.1)( tr
极点位于虚轴
暂态响应稳态响应
s
sR1
5.12
15.2
1
12
ss
)0( e5.2 e2 2 ttt
H(s) 的极点
5.1)( tr
E(s) 的极点
自由响应强迫响应
Recommended












![DIA方法在组学分析的定性和定量表征以及生物医学分析中的应用 · 2017. 2. 21. · [ 海报纪要 ] 2 四极杆扫描(Da) 四 极杆窗口 (Da) 函数集成](https://img.pdfslide.tips/doc/110x75/5fed44aabec3282ada5e06a7/diaoeccoeeeccoecc.jpg)

