ANALISE DE UM CONVERSOR EM MATRIZ PARA APLICACOES EM
AGUAS PROFUNDAS
Lıvia Lisandro Judice Godoy
Projeto de Graduacao apresentado ao Corpo
Docente do Departamento de Engenharia
Eletrica da Escola Politecnica da Universidade
Federal do Rio de Janeiro, como parte dos
requisitos necessarios a obtencao do tıtulo de
Engenheiro Eletricista.
Orientador: Robson Francisco da Silva Dias
Rio de Janeiro
Marco de 2015

ANALISE DE UM CONVERSOR EM MATRIZ PARA APLICACOES EM
AGUAS PROFUNDAS
Lıvia Lisandro Judice Godoy
PROJETO DE GRADUACAO SUBMETIDO AO CORPO DOCENTE
DO DEPARTAMENTO DE ENGENHARIA ELETRICA DA ESCOLA
POLITECNICA DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COMO PARTE DOS REQUISITOS NECESSARIOS PARA A OBTENCAO DO
GRAU DE ENGENHEIRO ELETRICISTA.
Examinado por:
Prof. Robson Francisco da Silva Dias, D.Sc.
Prof. Antonio Carlos Siqueira de Lima, D.Sc.
Eng. Luiz Eduardo Altoe Lirio, M.Sc.
RIO DE JANEIRO, RJ – BRASIL
MARCO DE 2015

Lisandro Judice Godoy, Lıvia
Analise de um Conversor em Matriz para Aplicacoes em
Aguas Profundas / Lıvia Lisandro Judice Godoy. – Rio de
Janeiro: UFRJ/Escola Politecnica, 2015.
XVII, 95 p.: il.; 29, 7cm.
Orientador: Robson Francisco da Silva Dias
Projeto de Graduacao – UFRJ/Escola Politecnica/
Departamento de Engenharia Eletrica, 2015.
Referencias Bibliograficas: p. 86 – 90.
1. Eletronica de Potencia. 2. Conversor em Matriz.
3. Controle PWM. 4. Deepsea. 5. Matrix Converter. I.
Francisco da Silva Dias, Robson. II. Universidade Federal
do Rio de Janeiro, Escola Politecnica, Departamento de
Engenharia Eletrica. III. Analise de um Conversor em
Matriz para Aplicacoes em Aguas Profundas.
iii

“The desire that guides me in all
I do is the desire to harness the
forces of nature to the service of
mankind.” (Nikola Tesla)
iv

Agradecimentos
Aos meus amados pais, Renato e Candida, todo meu amor e agradecimento. Por
meu apoiarem desde nova a buscar sempre o meu melhor. Por me darem suporte
emocional, mental e financeiro em todos esses anos de estudo. Por nunca duvidarem
do meu potencial e por vibrarem em todas as minhas conquistas. Todo o sacrifıcio
que fizeram para me dar educacao – em todos os aspectos – e me incentivarem a
ser sempre melhor, a dar o meu melhor e buscar ate mesmo o que eu nao acredito
poder. Sem voces, nada disso faria sentido.
Ao meu irmao, que carrega a docura e carinho que a infancia se cuida de zelar.
Ao sair de casa aos 18 anos para fazer faculdade, certamente minha maior dor foi
ficar longe de voce. Eu espero que um dia voce possa vencer todas as suas batalhas
e eu tambem sempre estarei aqui para apoia-lo e cuidar de voce.
Aos meus avos, Italo, Ideralda e Edir, meus tios e tias Alda, Veronica, Afonso,
Italo, Manoela, Leo e Denise por estarem comigo em cada vitoria e comemorarem
com verdade e alegria cada aprovacao, cada trabalho apresentado, cada semestre
finalizado. O valor que voces sempre deram a cada pequena conquista eu nunca vou
ser capaz de agradecer.
Ao meu avo Joaquim, que nao esta mais nesse mundo, mas me ensinou desde
pequena o valor que devemos dar ao coracao e a todas as coisas que vem dele. Nunca
vou me esquecer das suas palavras, dos seus sabios ensinamentos, me encorajando
a buscar as coisas com o coracao e ser sempre a melhor pessoa que eu puder, para
os outros e pra mim mesma.
Aos meus primos Letıcia, Italo, Ana Clara, Mell, Joao Pedro, Estevao e Raphael,
v

voces sao os amigos que Deus fez nascer na minha famılia. Espero sempre poder
ajuda-los no que eu puder e estar presente para o que voces precisarem.
A minha tia Teresinha, minha guia de mente e coracao. Minha amiga da alma,
que me ajuda, me apoia e me empurra pra frente todas as vezes que eu erro o passo.
Em cada passo da minha vida e da minha formacao, voce esteve la. E a meu tio
Tim, por ter sido meu mentor na escolha dessa profissao. E por ter me enchido de
certezas, quando eu tinha muitas duvidas.
Aos meus amigos de faculdade, sem os quais tenho certeza de que essa jornada
seria muito mais difıcil. Obrigada por estarem sempre por perto para me ajudar a
estudar, me ensinar, me fazer rir e fazer com que tudo se tornasse mais leve, menos
cansativo e mais feliz. Os amigos que ganhei desde o primeiro dia de aula, alguns
que conquistei (e me conquistaram) depois e outros do laboratorio, com quem passei
momentos tao divertidos e de tanto aprendizado.
Ao meus amigos da vida, de Campos, do Rio e de Niteroi. Sem voces, os meus
dias teriam menos luz. Amigos sao a famılia que a gente escolhe, e voces certamente
sao a minha famılia.
Ao meu namorado Jonathan, por todo apoio, incentivo, forca e amor, especial-
mente nos momentos mais difıceis dos ultimos meses de faculdade. E por ter lido
este trabalho em cada passo, acima do meu ombro.
E um agradecimento especial ao Robson, meu orientador. E com toda a certeza
no meu coracao que eu afirmo que so cheguei ao final desta faculdade por sua causa.
Quando tudo parecia difıcil, impossıvel, quase inconquistavel, voce me mostrou de
novo que valia a pena lutar mais por essa profissao. Voce nos incentivou na sala de
aula, nos corredores e nas palavras amigas. Ensinou mais que formulas e teorias. E
por me orientar todos esses anos, com o carinho de um pai e amigo, muito obrigada.
E, por fim, a Deus, por me guiar e conceder saude, paz, tranquilidade e amor
para seguir em frente em cada dia da minha vida.
vi

Resumo do Projeto de Graduacao apresentado a Escola Politecnica/UFRJ como
parte dos requisitos necessarios para a obtencao do grau de Engenheiro Eletricista
ANALISE DE UM CONVERSOR EM MATRIZ PARA APLICACOES EM
AGUAS PROFUNDAS
Lıvia Lisandro Judice Godoy
Marco/2015
Orientador: Robson Francisco da Silva Dias
Departamento: Engenharia Eletrica
Este trabalho tem por objetivo analisar um Conversor em Matriz de Eletronica
de Potencia para aplicacoes em altas pressoes, no acionamento de motores usados
na extracao de petroleo em redes submarinas em aguas profundas. Foi apresentado
um resumo das configuracoes possıveis para redes offshore, justificando a escolha
da configuracao de rede e conversor adotada. Posteriormente, foi feita uma revisao
teorica da topologia do Conversor em Matriz e dos metodos de comutacao e
controle ja desenvolvidos, sendo a estrategia Carrier-Based PWM escolhida para o
Conversor do presente trabalho, por sua simplicidade, efetividade e robustez.
Por fim, simulacoes no domınio do tempo foram feitas e analisadas para comprovar
como eficiente a escolha desta topologia de Conversor aplicado ao sistema de redes
offshore.
vii

Abstract of Graduation Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Electrical Engineer
ANALYSIS OF A MATRIX CONVERTER FOR DEEP WATER
APPLICATIONS
Lıvia Lisandro Judice Godoy
March/2015
Advisor: Robson Francisco da Silva Dias
Department: Electrical Engineering
The present study aims to analyse a computacional model of a power electronics
matrix converter with PWM control to handle high pressure applications, in this
case, to drive motors used on the extraction of oil in deep water. It was presented
a review of the possible configurations for offshore grids and explained the one cho-
sen. Thereon, a review on the topologies of Matrix Converter was made as well as
a review on the commutation and control methods, where the Carrier-Based PWM
was chosen for its simplicity, effectivity and strength.
Finally, simulations on time domain where presented and analysed to prove the
efficiency of the Matrix Converter and Carrier-Based PWM technic on deepsea ap-
plications.
viii

Sumario
Agradecimentos v
Lista de Figuras xi
Lista de Tabelas xv
Lista de Abreviaturas xvi
1 Introducao 1
1.1 Consideracoes Iniciais . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Motivacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.4 Estrutura do Texto . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Sistemas de Alimentacao e Interligacao em Redes Offshore 4
2.1 Energia Eletrica na Plataforma . . . . . . . . . . . . . . . . . . . . . 4
2.1.1 Configuracoes para a Rede de Transmissao Offshore . . . . . . 6
2.1.2 Configuracao Adotada de Rede Offshore . . . . . . . . . . . . 11
2.2 Modelo Simplificado do Cabo Umbilical Submarino . . . . . . . . . . 14
3 Topologias de Conversores em Matriz 18
3.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2 Filtro de Entrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.3 Clamp Circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.4 Chaves Bidirecionais . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
ix

3.4.1 Configuracoes da Celula Bidirecional . . . . . . . . . . . . . . 26
3.4.2 Calculo das Perdas nos Semicondutores . . . . . . . . . . . . . 30
4 Estrategias de Comutacao e Controle do Conversor em Matriz 33
4.1 Comutacao de Corrente . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.1.1 Princıpio de Funcionamento . . . . . . . . . . . . . . . . . . . 34
4.1.2 Estrategias de Comutacao de Corrente . . . . . . . . . . . . . 37
4.2 Revisao das Estrategias de Controles . . . . . . . . . . . . . . . . . . 40
4.2.1 Resumo dos Metodos de Modulacao . . . . . . . . . . . . . . . 41
4.3 Modelagem Matematica do Metodo de Controle Carrier-Based PWM 48
5 Simulacoes Computacionais e Analises 55
5.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.2 Modelo Computacional do Controle Carrier-Based PWM . . . . . . . 56
5.3 Conversor em Matriz Trifasico para Trifasico . . . . . . . . . . . . . . 61
5.3.1 Conversor em Matriz Trifasico para Trifasico com Filtro de
Entrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.3.2 Conversor em Matriz Trifasico para Trifasico sem Filtro de
Entrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.4 Conversor em Matriz Trifasico para Trifasico com Acionamento do
Motor de Inducao Trifasico . . . . . . . . . . . . . . . . . . . . . . . . 67
5.4.1 Analise do Comportamento do Motor Trifasico de Inducao em
Regime Permanente . . . . . . . . . . . . . . . . . . . . . . . . 68
5.4.2 Analise do Comportamento do Motor em Ocorrencia de
Curto-circuito Fase-Fase na Rede . . . . . . . . . . . . . . . . 77
5.4.3 Conversor em Matriz Trifasico para Trifasico na Rede Offshore 82
6 Conclusoes 85
Referencias Bibliograficas 86
A Conversor em Matriz em Cascata 91
x

Lista de Figuras
2.1 Ilustracao de um Electrical Submersible Pump, produzido pela Sch-
lumberger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 Transmissao em Corrente Contınua com o Motor CC em Aguas Pro-
fundas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 Transmissao utilizando o Cabo Submarino como Link CC . . . . . . . 8
2.4 Transmissao em Corrente Alternada com o Inversor na Superfıcie . . 9
2.5 Transmissao em Corrente Alternada com o Inversor de Frequencia
embaixo d’agua . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.6 Rede de Transmissao Offshore . . . . . . . . . . . . . . . . . . . . . . 13
2.7 Modelo π-Equivalente Utilizado para Modelar o Cabo Umbilical . . . 15
3.1 Circuito de potencia do Conversor em Matriz Direto Trifasico para
Trifasico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2 Esquema do Conversor em Matriz com Filtro de Entrada Conectado
ao Motor de Inducao . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.3 Topologias de Filtro de Entrada para Conversor em Matriz a) Co-
nexao Estrela b) Filtro LC de segunda ordem c) Filtro LC com Re-
sistor paralelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.4 Circuito Clamp para Protecao . . . . . . . . . . . . . . . . . . . . . . 25
3.5 Configuracao da Celula Bidirecional de Dois IGBT’s em Modo
Emissor-comum Antiparalelo . . . . . . . . . . . . . . . . . . . . . . . 27
3.6 Configuracao da Celula Bidirecional de Dois IGBT’s Modo Coletor-
comum Antiparalelo . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
xi

3.7 Configuracao da Celula Bidirecional com Dois RB-IGBT’s em Anti-
paralelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.8 Configuracao da Celula Bidirecional de Ponte de Diodo Monofasica . 29
3.9 Modulo Integrado EconoMAC . . . . . . . . . . . . . . . . . . . . . . 29
4.1 Esquemas de Conexoes que nao podem ocorrer entre a Entrada e
Saıda de Duas Fases . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.2 Grafico Ilustrativo do Padrao de Chaveamento . . . . . . . . . . . . . 36
4.3 Esquema de Comutacao em Quatro Passos de Duas Celulas Bidireci-
onais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.4 Vetores de Corrente e Tensao Representando as Combinacoes de Cha-
veamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.1 Circuito PLL do Controle do Conversor em Matriz . . . . . . . . . . 57
5.2 Grafico do Sinal de Sincronismo do PLL . . . . . . . . . . . . . . . . 57
5.3 Diagrama de Blocos dos Sinais kA, kBekC . . . . . . . . . . . . . . . . 58
5.4 Grafico dos Sinais de kA, kBekC . . . . . . . . . . . . . . . . . . . . . 58
5.5 Diagrama de Blocos da Soma dos Valores Maximos e Mınimos de
kA, kBekC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.6 Diagrama de Blocos dos Duty Ratios das Chaves . . . . . . . . . . . . 59
5.7 Diagrama de Blocos do Sinal ∆ . . . . . . . . . . . . . . . . . . . . . 60
5.8 Graficos dos Sinais Da(t), Db(t) e Dc(t) . . . . . . . . . . . . . . . . . 60
5.9 Grafico da Soma dos Sinais Da(t), Db(t) e Dc(t) . . . . . . . . . . . . 61
5.10 Grafico dos Sinais Utilizados na Modulacao PWM . . . . . . . . . . . 61
5.11 Circuito de Potencia do Conversor Acionando uma Carga Indutiva . . 62
5.12 Graficos das Correntes de Saıda com Modulacao da Frequencia de
Saıda a 60Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.13 Graficos das Correntes de Entrada com Modulacao da Frequencia de
Saıda a 60Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
xii

5.14 Graficos das Correntes de Saıda com Modulacao da Frequencia de
Saıda a 50Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.15 Graficos das Correntes de Saıda com Modulacao da Frequencia de
Saıda a 20Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.16 Graficos das Correntes de Saıda com Modulacao da Frequencia de
Saıda a 2Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.17 Graficos das Correntes de Saıda com Modulacao da Frequencia de
Saıda a 120Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.18 Graficos das Correntes de Saıda com Modulacao da Frequencia de
Saıda a 500Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.19 Conversor em Matriz Trifasico para Trifasico sem Filtro de Entrada . 66
5.20 Graficos das Correntes de Saıda com Modulacao da Frequencia de
Saıda a 500Hz sem Filtro de Entrada . . . . . . . . . . . . . . . . . . 67
5.21 Simulacao do Acionamento de um Motor de Inducao . . . . . . . . . 68
5.22 Grafico da Velocidade do Motor a 60Hz . . . . . . . . . . . . . . . . . 69
5.23 Grafico das Correntes de Saıda do Motor a 60Hz . . . . . . . . . . . . 70
5.24 Grafico em Detalhe das Correntes de Saıda do Motor a 60Hz . . . . . 70
5.25 Grafico com Valores Medios e RMS das Correntes de Saıda do Motor
a 60Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.26 Grafico com Valores Medios e RMS das Correntes de Entrada da Rede
a 60Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.27 Grafico das Tensoes de Saıda do Motor a 60Hz . . . . . . . . . . . . . 72
5.28 Grafico com Valores RMS das Tensoes de Saıda do Motor a 60Hz . . 72
5.29 Grafico com Valores RMS das Tensoes de Entrada da Rede a 60Hz . . 73
5.30 Analise das FFT nas Correntes de Entrada do Motor a 60Hz . . . . . 74
5.31 Analise das FFTs nas Correntes de Saıda do Motor a 60Hz . . . . . . 74
5.32 Valores de THD nas Correntes de Entrada do Motor a 60Hz . . . . . 75
5.33 Valores de THD nas Correntes de Saıda do Motor a 60Hz . . . . . . . 75
xiii

5.34 Circuito para Medicao de Potencia Instantanea na Entrada e Saıda
do Conversor em Matriz . . . . . . . . . . . . . . . . . . . . . . . . . 76
5.35 Valores de Potencia Instantanea na Entrada e Saıda do Conversor em
Matriz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
5.36 Graficos de Tensao e Corrente de Entrada no Conversor . . . . . . . . 77
5.37 Sinal da Chave para Simular um Curto-circuito Fase-fase . . . . . . . 78
5.38 Grafico das Correntes de Entrada Apos Curto-Circuito Fase-Fase . . . 79
5.39 Detalhe das Correntes de Entrada no Conversor Apos Curto-Circuito
Fase-Fase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.40 Grafico das Correntes de saıda apos Curto-Circuito Fase-Fase . . . . . 81
5.41 Detalhes das Correntes de Saıda Apos Curto-Circuito Fase-Fase . . . 81
5.42 Grafico da Velocidade do Motor Apos Curto-Circuito Fase-Fase . . . 82
5.43 Circuito de Potencia do Conversor em Matriz com o Cabo Umbilical . 83
5.44 Grafico da Corrente de Saıda a 60Hz de Modulacao do Rede com
Cabo Umbilical . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
5.45 Grafico da Corrente de Saıda a 120Hz de Modulacao do Rede com
Cabo Umbilical . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
A.1 Circuito de potencia do Conversor em Matriz em Cascata . . . . . . . 92
A.2 Circuito de Potencia do Conversor em Matriz Trifasico para Monofasico 92
A.3 Grafico da Corrente de Saıda do Conversor em Matriz Trifasico para
Monofasico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
A.4 Circuito de Potencia do Conversor em Matriz em Cascata . . . . . . . 94
A.5 Grafico das Correntes de Saıda no Conversor em Matriz em Cascata . 94
A.6 Grafico do Velocidade no Motor Acionado pelo Conversor em Matriz
em Cascata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
xiv

Lista de Tabelas
2.1 Impedancia e Admitancia do Cabo Umbilical em Sequencia Positiva
e Sequencia Zero para Diferentes Frequencias . . . . . . . . . . . . . . 15
2.2 Valores Calculados de Zc e γ do Modelo π-Equivalente do Cabo Um-
bilical . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3 Valores Calculados de Zc e γ do Modelo π-Equivalente do Cabo Um-
bilical . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4.1 Combinacoes dos Estados dos Componentes . . . . . . . . . . . . . . 39
4.2 Estados da Tensao de Entrada do Metodo PWM . . . . . . . . . . . . 47
5.1 Caracterısticas do Motor Utilizado na Simulacao . . . . . . . . . . . . 68
xv

Lista de Abreviaturas
CA Corrente Alternada, p. 8
CC Corrente Contınua, p. 6
DMC Direct Matrix Converter, p. 21
DTC Direct Torque Control, p. 50
ESP Electrical Submersible Pumps, p. 4
FTT Fast Fourier Transform, p. 76
HVAC High Voltage Alternating Current, p. 5
HVDC High Voltage Direct Current, p. 5
IGBT Insulated Gate Bipolar Transistor, p. 29
IGCT Integrated Gate Commutated Thyristors, p. 29
IMC Indirect Matrix Converter, p. 21
MOSFET Metal Oxide Semiconductor Field-Effect Transistor, p. 29
MOS MOS Control Tyristors, p. 29
PC Predictive Control, p. 50
PPL Phase Locked Loop, p. 59
PWM Pulse Width Modulation, p. 3, 24
xvi

RB-IGBT Reverse-Blocking IGBT, p. 31
RMS Root Mean Square, p. 73
SPWM Sinusoidal Pulse Width Modulation, p. 49
SVM Space Vector Modulation, p. 47
THD Total Harmonic Distorcion, p. 77
VSI Voltage Sourced Inverter, p. 10, 23
xvii

Capıtulo 1
Introducao
1.1 Consideracoes Iniciais
Nos ultimos anos, com o crescente esgotamento dos pocos de petroleo em aguas
rasas, cada vez mais a industria passou a buscar por inovadoras tecnologias subma-
rinas para exploracao de novos reservatorios em aguas profundas, geralmente de 300
a 3000 metros de profundidade. Esses pocos sao responsaveis por 40% da extracao
mundial de petroleo e gas [1] e requerem grandes quantidades de energia para funcio-
namento dos equipamentos submarinos como bombas e compressores, acionados por
motores eletricos, usados para extrair e exportar hidrocarbonetos dos reservatorios
para navios petroleiros.
O acionamento desses motores nas plataformas de petroleo e feito por meio de
conversores de eletronica de potencia presentes na superfıcie da plataforma, conecta-
dos por cabos umbilicais. Tais conversores sao extremamente volumosos e pesados –
da ordem de algumas toneladas – o que aumenta a complexidade da plataforma e os
custos de construcao. Alem disso, esses motores ficam situados em ambientes muito
profundos e, geralmente, a 300 atm de pressao, o que faz com que a partida dos
motores seja problematica, ja que os cabos que transmitem a tensao dos conversores
ate os motores so tem especificacao de fabricante para o funcionamento a frequencia
de 60 Hertz, fazendo com que nao seja possıvel o calculo previo da tensao que chega
ao motor para outras frequencias, quando o motor e de velocidade variavel.
1

A princıpio, a melhor solucao para esta questao e posicionar o conversor jun-
tamente ao motor a ser acionado, ou seja, em aguas profundas. No entanto, os
conversores CA-CA convencionais necessitam de volumosos componentes capacito-
res de energia para seu funcionamento, os quais, em longo prazo, nao resistem a
altas pressoes. Isso acontece porque tal meio afeta rigorosamente sua tensao de
break-down [2], que e o valor a partir do qual o dieletrico no capacitor comeca a con-
duzir, causando faıscas, explosoes, etc. Alem disso, mesmo em ambientes ao nıvel
do mar, a vida util dos capacitores reduz muito com o passar das horas de operacao,
especialmente em altas temperaturas. Por esses motivos, surge a necessidade de
buscar uma diferente topologia de conversor para essa aplicacao, que nao apresente
o problema este problema.
1.2 Motivacao
Apesar de existirem alguns estudos [3] em Eletronica de Potencia a respeito da
otimizacao de componentes para o uso em ambientes de altas pressoes, tais compo-
nentes, alem de perderem sua confiabilidade a longo prazo, o que levaria a necessi-
dade de manutencao constante, tem valor de mercado muito elevado e fabricantes
muito restritos.
Por essas razoes, a solucao ideal encontrada para aplicacao em ambientes de altas
pressoes e posicionar no fundo do mar, junto ao motor, um tipo de conversor CA-
CA que nao inclua capacitores, tornando o sistema offshore mais confiavel e menos
custoso, aliviando a plataforma e fazendo com que ela se torne menos complexa
e menos pesada. A topologia escolhida para esses fins foi o Conversor em Matriz
– em ingles, Matrix Converters que sera controlado utilizando-se a estrategia de
controle Carrier-Based PWM, por ter se mostrado a mais simples dentre as efetivas
e robustas.
Por nao possuir volumosos componentes armazenadores, o Conversor em Matriz
e bastante utilizado em aplicacoes onde espaco, confiabilidade e peso sao as princi-
pais preocupacoes [4]. Esse conversor ja foram utilizados em aplicacoes em baixas
2

potencias como aeronaves [5] ou acionamento de pequenos motores [4] e em altas
potencias como geracao eolica [6] ou acionamento de grandes motores [7]. Desta
forma, esta foi a topologia escolhida para ser estudada e solucionar o problema das
plataformas.
1.3 Objetivo
Este trabalho tem como objetivo estudar a topologia do Conversor em Matriz
trifasico para trifasico, aplicar a tecnica de controle PWM neste conversor de forma
a ser possıvel modelar a saıda em qualquer frequencia desejada. Para comprovar a
escolha, serao feitas simulacoes no software PSIM© do Conversor acionando um
motor de inducao trifasico – em analogia ao encontrado nas plataformas – e de
uma rede submarina, com insercao de cabos umbilicais conectando a subestacao ao
Conversor.
1.4 Estrutura do Texto
O texto esta organizado em seis capıtulos, incluindo a introducao, onde se apre-
sentam em linhas gerais, os objetivos e justificativa para o estudo a respeito deste
conversor. O capıtulo 2 contem discussoes a respeito da situacao atual dos sistemas
de transmissao e geracao offshore, caracterizando a energia que e distribuıda atu-
almente e justificando a escolha da nova configuracao. Ja no Capıtulo 3 sao feitas
consideracoes a respeito dos princıpios basicos da topologia do Conversor em Matriz
e seus componentes, como as chaves bidirecionais, filtros de entrada e circuito de
protecao. No Capıtulo 4 e feita uma discussao sobre os metodos de controle exis-
tentes e detalhamento do metodo PWM escolhido para controlar o conversor. No
capıtulo 5 sao mostrados os resultados das analises e simulacoes realizadas utilizando
o software de simulacao PSIM© e os resultados que comprovam a efetividade da
tecnica de controle adotada. E, por fim, no Capıtulo 6 encontram-se as conclusoes
sobre a escolha do Conversor e comprovacao da confiabilidade do modelo escolhido.
3

Capıtulo 2
Sistemas de Alimentacao e
Interligacao em Redes Offshore
2.1 Energia Eletrica na Plataforma
Alem da crescente busca por novas e otimizadas tecnologias de exploracao de
petroleo e gas em aguas profundas, outro topico que demanda pesquisa constante na
industria e a melhora da producao em antigos reservatorios que ja estao praticamente
esgotados. Estes, geralmente, estes apresentam possibilidade de aumento de 10 a 20
anos em sua vida util, caso sejam renovados seus equipamentos e meios de producao,
como e o caso da Bacia de Campos, situada no norte do estado do Rio de Janeiro.
Um dos principais equipamentos de exploracao sao os chamados Electrical Sub-
mersible Pumps (ESP) – Bombas Eletricas Submersıveis – apresentados na Fi-
gura 2.1. Os ESP’s foram instalados pela primeira vez em 2007 no Campo de
Jubarte, o primeiro poco explorado do pre-sal. Eles sao acionados por motores de
inducao e sao usados para suspensao de volumes fluidos dos pocos, que podem va-
riar de 24 a 24600m3
dia, caso seja utilizado um controle de variacao de velocidade. A
respeito da sua demanda de energia, o ESP do Campo de Jubarte, por exemplo,
foi desenvolvido para operar com potencia nominal de 1200HP; porem, na Bacia de
Campos e do Espırito Santo ja existem ESP’s de 1500HP a 2000HP de potencia e
4

tensao de 7kV, como e o caso do Campo de Marlin Leste.
Figura 2.1: Ilustracao de um Electrical Submersible Pump, produzido pela Schlum-berger
Alem dos equipamentos submarinos, diversos outros situados na plataforma
tambem demandam grande utilizacao de energia, que e gerada na plataforma, tipica-
mente, por turbinas a gas e motores de combustao interna em paralelo – alcancando
de 20 a 40% de eficiencia. Em outros casos, linhas de transmissao HVAC e HVDC
provenientes de parques eolicos em alto mar ou redes em terra sao propostos para
abastecer energeticamente esses equipamentos [6], [8].
Por essas razoes, o estudo dos sistemas de transmissao de energia, alimentacao e
interligacao de plataformas e um fator crucial para obter um perfeito funcionamento
dos equipamentos utilizados nos sistemas de exploracao em alto mar. Neste capıtulo
serao descritas as configuracoes possıveis para esses sistemas de energia, os elementos
que os compoem, bem como a escolha da configuracao escolhida. Ao final, serao
feitas analises a respeito do cabo umbilical e sua modelagem.
Vale ressaltar, antes de iniciar as descricoes propostas neste capıtulo, que os
termos “Rede Offshore” e “Rede Submarina” possuem significados diferentes. Ao
citar “Rede Offshore”, a ideia e se referenciar as redes de geracao, transmissao e
5

interligacao em alto mar, nao sendo necessaria haver qualquer tipo de distribuicao
submarina, podendo ser acionado apenas um equipamento no fundo do mar, como
sera visto a seguir. Ja quando e citada “Rede Submarina”, deve ficar subenten-
dido que se trata da transmissao e interligacao do fundo do mar, com mais de um
equipamento sendo acionado a diferentes nıveis de tensao.
2.1.1 Configuracoes para a Rede de Transmissao Offshore
Em qualquer que seja o tipo de geracao de energia empregado para abastecimento
dos equipamentos em alto mar, faz-se necessario o uso de conversores de energia,
sejam eles CA-CC ou CA-CA, para realizar o ajuste das tensoes aos nıveis desejados.
Dessa forma, considerando a geracao de energia na superfıcie da plataforma e o motor
acionado no fundo do oceano, bem como sendo o ambiente desejado o mais molhado
possıvel (sem camaras de vacuo), existem quatro diferentes configuracoes para a
disposicao do cabo e do conversor na transmissao da energia, descritos a seguir.
E importante ressaltar que, nestes itens, a rede e descrita de forma simplificada,
nao sendo detalhados, por enquanto, os pormenores da rede, sendo apenas feitas
generalizacoes, com o objetivo de justificar a escolha da configuracao adotada.
Transmissao em Corrente Contınua com o Motor CC em Aguas Profundas
Inicialmente, pode-se analisar a possıvel configuracao apresentada na Figura 2.4.
Nela, todos os componentes eletronicos, inclusive o conversor CC , ficam na superfıcie
da plataforma. A rede e composta por um disjuntor conectado a um transforma-
dor, que e conectado ao conversor CA-CC. A corrente contınua proveniente dele e
transmitida por um cabo submarino ate o motor CC.
6

Figura 2.2: Transmissao em Corrente Contınua com o Motor CC em Aguas Profun-das
Ja que a transmissao e em corrente contınua, as perdas sao baixas, o controle
e muito simples e nao existem ruıdos causados pelo chaveamento. No entanto, o
grande problema dessa configuracao e justamente a necessidade de o motor acionado
ser de corrente contınua, por algumas razoes. A primeira delas e que motores CC de
potencias da ordem de Mega-watts nao sao comercialmente utilizados, especialmente
pelo seu alto custo de producao, que chega a 20 vezes o valor de um motor de
inducao. A segunda razao e que, atualmente, os acionadores de motores CC foram
quase que completamente substituıdos por conversores de frequencia e maquinas
assıncronas. Por essas duas razoes, nao e possıvel encontrar algum fabricante que
produza motores CC isolados a oleo na faixa de Mega-watts. A terceira razao e que
as maquinas CC neste ambiente sao extremamente perigosas, devido a presenca das
escovas na sua montagem que podem gerar faıscas e incendios, no caso da maquina
estar imersa em oleo. Ja foram publicados estudos a respeito do desenvolvimento de
motores CC sem escovas que resistam a altas pressoes [9]; porem, estes tem potencia
nominal maxima de aproximadamente 10kW, nao sendo uteis a essa aplicacao. E,
por fim, a quarta e ultima razao e nao ser possıvel desenvolver uma rede submarina
dessa forma, ja que todos os equipamentos teriam que ser alimentados pelo mesmo
nıvel tensao, vindo do cabo.
7

Transmissao utilizando o Cabo Submarino como Link CC
Similar a configuracao anterior, a Figura 2.3 apresenta tambem um disjuntor
conectado a um transformador, que e conectado a um conversor CA-CC. No entanto,
aqui, o cabo submarino nao funciona apenas como transmissor de corrente CC;
ele tambem se torna o chamado link CC dos conversores CC-CA convencionais.
Em teoria, essa configuracao seria possıvel, pois a capacitancia do cabo submarino
varia em torno de 100nF por quilometro de extensao do cabo [1]. E, mesmo que
a capacitancia nao seja adequada para o conversor CA-CC, pode-se adicionar uma
capacitancia na superfıcie da plataforma. No final do cabo, no fundo do oceano,
ficaria o conversor CC-CA conectado ao motor assıncrono.
Figura 2.3: Transmissao utilizando o Cabo Submarino como Link CC
Esta parece ser a solucao ideal, ja que nao e necessaria a utilizacao de maquinas
CC e seria possıvel utilizar o conversor CC-CA para ajustar a tensao para diversos
valores. Alem disso, como a transmissao e em corrente contınua, as perdas sao
baixas.
No entanto, apesar de parecer uma solucao ideal, a configuracao tem algumas
desvantagens. A maior delas e que nao existe qualquer experiencia anterior com
sistemas partidos dessa forma e, portanto, seus efeitos a curto, medio ou longo
prazo nao sao conhecidos. O investimento de implantacao dessas redes e muito alto
e, portanto, esse tipo de tecnologia deveria ser largamente testado e analisado antes
8

de qualquer implantacao pratica. Alem disso, o conversor na superfıcie aumenta o
peso e a complexidade da plataforma.
Transmissao em Corrente Alternada com o Inversor na Superfıcie
Esta configuracao e o padrao atual, onde o disjuntor, o transformador e inversor
sao conectados e completamente operados na superfıcie da plataforma. O cabo
submarino faz a transmissao em corrente alternada, levando a energia ate o motor
no fundo do mar. Esse sistema e composto apenas de componentes ja conhecidos e
sua manutencao e facil, por estarem todos na superfıcie.
Figura 2.4: Transmissao em Corrente Alternada com o Inversor na Superfıcie
No entanto, algumas desvantagens surgem nesse tipo de configuracao. A primeira
e que o grande volume dos conversores e seu peso aumentam a area e a complexi-
dade da plataforma. A segunda e que os harmonicos causados pelo chaveamento dos
semicondutores podem causar sobretensoes no motor, ao final do cabo submarino.
A terceira desvantagem e que nao ha especificacao de parametros do cabo pelo fabri-
cante para tensoes diferentes de 60Hz, portanto, tornando-se complicado o calculo
previo da tensao que chegara ao motor, o que gera problemas de acionamento. E,
9

por fim, as perdas na transmissao sao extremamente altas [1].
Transmissao em Corrente Alternada com o Inversor de Frequencia em
Aguas Profundas
Nesta configuracao, um disjuntor conecta a rede a um transformador, responsavel
por adaptar o nıvel de tensao da rede ao nıvel de tensao do inversor de frequencia
– conversor CA-CA. Esse transformador, por sua vez, e conectado a um cabo que
leva a energia ate o inversor, considerando que este seja o tıpico Voltage Sourced
Inverter (VSI) , que consiste em tres etapas de conversao: um conversor CA-CC,
um link CC e um conversor CC-CA. A Figura 2.5 ilustra a configuracao descrita.
Figura 2.5: Transmissao em Corrente Alternada com o Inversor de Frequencia em-baixo d’agua
Neste tipo de rede as perdas de energia sao baixas [10], a complexidade da
plataforma diminui, pois o conversor e um dos equipamentos mais volumosos e o
acionamento do motor se torna mais confiavel, ja que o inversor esta conectado
diretamente a ele, garantindo a velocidade esperada. Alem disso, com o inversor
no fundo do mar, torna-se possıvel a realizacao de uma rede submarina, que ser-
viria para alimentar equipamentos do poco instalado ou ate mesmo outros pocos
marginais.
No entanto, essa configuracao apresenta grandes desvantagens, a maioria relaci-
onada a confiabilidade do sistema, pois nao e possıvel a utilizacao de VSIs, ja que
seus capacitores armazenadores nao resistem a altas pressoes, [2]. Alem disso, a vida
10

util do capacitor reduz muito com o passar do tempo de uso, o que requer constantes
manutencoes, o que seria bastante complexo, no caso de o inversor estar a 3000m
de profundidade.
Dessa forma, para utilizar esta configuracao de rede, e necessario o desenvolvi-
mento de um inversor que nao tenha tais desvantagens.
2.1.2 Configuracao Adotada de Rede Offshore
Apos a descricao das configuracoes possıveis de redes offshore feita em 2.1.1,
e considerando-se a necessidade de renovacao das tecnologias de exploracao de
petroleo, pode-se analisar qual seria a solucao ideal para a transmissao de energia e
acionamento de motores na plataforma.
Alguns itens gerais podem ser reforcados a priori, para facilitar a analise:
Nao e possıvel a utilizacao de motores em corrente contınua para o acionamento
das bombas, ja que esses motores nao sao produzidos comercialmente para
altas potencias por questoes de custo e nao sao confiaveis devido as escovas;
Tecnologias de conversores inovadoras e nao estudadas com profundidade na
literatura nao devem ser aplicados a curto prazo, ja que requerem um estudo
mais aprofundado para garantia de funcionalidade, alem de alto investimento;
Os capacitores sao extremamente sensıveis a altas pressoes, ja que tal tipo de
ambiente afeta rigorosamente sua tensao de break-down; alem disso, sua vida
util e bastante restrita, nao sendo aconselhavel utiliza-los em aguas profundas.
Considerando os pontos enumerados acima, a configuracao proposta em 2.1.1
nao e possıvel de ser adotada na pratica, pelo problema do motor CC.
Ja a configuracao descrita em 2.1.1 nao poderia ser aplicada, pelo menos por
enquanto, pois ainda requer muito estudo para que a teoria por tras dela consiga
ser aplicada na pratica e seus efeitos ainda nao sao conhecidos.
Em 2.1.1 foi descrita a configuracao utilizada atualmente, onde a transmissao e
feita com o inversor de frequencia localizado na superfıcie da plataforma, porem,
11

ela apresenta todas as desvantagens descritas, gerando alguns problemas.
Sendo assim, a configuracao mais adequada parece ser a proposta em 2.1.1,
porem foi observado que ela apresenta o grande problema de ter a necessidade
de utilizacao de capacitores no fundo do mar, que ja se provou nao ser recomendavel.
Desse impasse surgiu a solucao proposta neste trabalho, unindo as vantagens da
topologia descrita em 2.1.1 com a adaptacao necessaria para que ela seja possıvel
de ser aplicada na pratica. Essa solucao consiste em utilizar a rede proposta na
Figura 2.5, porem excluindo o problema dos capacitores, ao se trocar o inversor
convencional pelos Conversores em Matriz.
As vantagens de utilizar essa topologia sao, alem das ja descritas, as do proprio
Conversor em Matriz que, apesar de nao ser muito aplicado, atualmente, na industria
em comparacao a outras tecnologias, por uma serie de fatores que serao apresentados
no proximo capıtulo, ja foi largamente estudado e analisado na literatura. Dessa
forma, este trabalho se propoe a analisar um Conversor em Matriz e verificar, por
meio de simulacoes no domınio do tempo, sua aplicacao para o acionamento de
motores de inducao, similar aos utilizados na exploracao de petroleo.
Outro ponto interessante e que, com essa configuracao, e possıvel ter uma rede
submarina, com diferentes equipamentos alimentados por diferentes nıveis de tensao
embaixo d’agua. Isso se deve ao fato de que o equipamento responsavel pela mudanca
dos nıveis de tensao e o transformador e este so pode funcionar com aplicacao de
correntes alternadas.
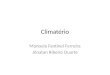
O modelo da rede real da plataforma e ilustrado em 2.6, similar a encontrada
em [1], onde o Conversor em Matriz e representado pelo inversor de frequencia.
12

Transformador Da Plataforma
Terminal da Unidade
Umbilical da Plataforma
Terminal da Unidade Umbilical
Subsea
Terminal da Unidade Umbilical
Subsea
Terminal da Unidade Umbilical
Subsea
Geração de Energia
Equipamentos CA da
Plataforma
Cargas da Plataforma
Equipamentos CA Subsea
Inversor de Frequência
Subsea
Inversor de Frequência
Subsea
Bomba Elétrica Submersível
Motor no Solo Oceânico
M
M
<=50km
<=5km
<=3km
M
Figura 2.6: Rede de Transmissao Offshore
Essa rede apresenta um modelo real de transmissao em alto mar, composto pelos
seguintes itens:
Geracao de energia transmitido pela subestacao na plataforma;
Transformador que regula a tensao a nıveis suportados pelo conversor em ma-
triz;
Cargas na superfıcie para funcionamento da plataforma;
Equipamentos CA no fundo do oceano e diferentes motores, caracterizando a
rede;
Modelagem do cabo submarino umbilical utilizado na transmissao da energia.
Para que essa rede se torne completa e preciso incluir a modelagem do cabo
submarino que transmitira a energia. Dessa forma, a proxima sessao tratara da
descricao e modelagem do cabo utilizado na rede offshore proposta.
13

2.2 Modelo Simplificado do Cabo Umbilical Sub-
marino
Nas transmissoes submarinas, os cabos utilizados sao fundamentais na garantia
de uma transmissao de qualidade. Por se situarem em grandes profundidades e
longas distancias, o custo de lancamento deles e alto e, por essa razao, geralmente
eles sao cabos umbilicais, ou “multifuncionais”; nao contem apenas a transmissao
da energia eletrica, mas tambem sistemas de comunicacao, comando, refrigeracao
ou cabos estruturais.
Esses cabos umbilicais podem ser de varios modelos, como do tipo coaxiais ou
pipe-type, envolvidos por camadas isolantes ou metalicas, tendo grande aplicacao em
pocos de petroleos em aguas profundas, pois a instalacao torna-se mais compacta.
Eles sao tubulacoes dentro de tubulacoes, sendo que os condutores no interior podem
ser nao-concentricos, o que aumenta a complexidade da modelagem do cabo para
simulacao.
Se fosse usado para simulacao o software PSCAD©, bastava adicionar os
parametros de construcao do cabo no modelo existente no proprio programa, nao
sendo necessarios maiores calculos. No entanto, escolheu-se utilizar nas simulacoes
o software PSIM©, que nao apresenta modelagem de cabo disponıvel.
Por isso, como o objetivo do trabalho nao e estudar o cabo submarino, e sim utili-
zar sua modelagem para observar seus efeitos na rede com o conversor, sera aplicado
o Modeloπ-Equivalente no calculo dos parametros discretos, mesmo sabendo-se que
esta e uma aproximacao bastante simplificada e rudimentar para tal modelagem.
Na analise de linhas de transmissao curtas em terra, geralmente e utilizada a
simplificacao do modelo de Circuito π-Nominal. No entanto, ele nao representa
a linha com exatidao, pois nao considera que os parametros sejam uniformemente
distribuıdos, o que gera uma discrepancia grande ao se comparar com a linha real.
Tal discrepancia e solucionada ao se utilizar o modelo de Circuito π-Equivalente [11],
onde a impedancia e admitancia da linha sao equacionadas de forma distribuıda,
14

sendo o modelo mais condizente com a realidade.
Apesar de o cabo umbilical ter no maximo 3000 metros de comprimento, decidiu-
se por analisa-lo utilizando o Modelo π-Equivalente, justamente por este ser mais real
e mais robusto. Os dados de impedancia e admitancia por unidade de comprimento
do cabo sao disponibilizados na Tabela 2.1.
Tabela 2.1: Impedancia e Admitancia do Cabo Umbilical em Sequencia Positiva eSequencia Zero para Diferentes Frequencias
f (Hz) ydi(mS/km) zd = Rd + iXd(Ω/km) yhi(mS/km) zh = Rh + iXh(Ω/km)
10 0,0162287 0,081022+0,0206993i 0,0362494 0,560960+0,0512849i
20 0,0413635 0,0814280+0,04564i 0,0343170 0,581329+0,0692558i
50 0,103471 0,086540+0,114258i 0,104981 0,594093+0,127668i
60 0,1122526 0,0874904+0,141287i 0,127137 0,626090+0,137004i
120 0,250106 0,117357+0,268532i 0,254370 0,643351+0,257367i
600 1,24990 0,451572+0,938056i 1,25409 0,903877+0,798643i
De posse desses dados, aplicando a teoria encontrada em [12], e possıvel desen-
volver o Modelo π-Equivalente do cabo e calcular a impedancia e admitancia da
linha, indicadas na Figura 2.7.
Z = Zc sinƴl
Y/2 = 1/Zc tan(ƴl/2)
Figura 2.7: Modelo π-Equivalente Utilizado para Modelar o Cabo Umbilical
Para calcular a impedancia Z = Zcsenh(γl) e a admitancia Y/2 = tanh(γl/2)Zc
,
onde a impedancia caracterıstica Zc e a constante de propagacao γ sao dadas por
Zc =√
zy
e γ =√z.y foram utilizados os parametros por unidade do cabo de
15

sequencia positiva e considerando-se o comprimento do cabo igual a 3000 metros,
conforme Tabela 2.2.
Tabela 2.2: Valores Calculados de Zc e γ do Modelo π-Equivalente do Cabo Umbi-lical
f (Hz) ydi(mS/km) zd = Rd + iXd(Ω/km) Zc γ
10 0,0162287 0,081022+0,0206993i 56,693653-44,030619i 0,0014291+0,0018401i
20 0,0413635 0,0814280+0,04564i 40,988529-24,013981i 0,0019866+0,0033909i
50 0,103471 0,086540+0,114258i 35,280942-11,852994i 0,0024529+0,0073011i
60 0,1122526 0,0874904+0,141287i 35,415683-10,081068i 0,0024704+0,0086787i
120 0,250106 0,117357+0,268532i 33,50673-7,002012i 0,0035025+0,0167605i
600 1,24990 0,451572+0,938056i 28,137543-6,4200079i 0,0160487+0,0703382i
Foi tambem considerado que a parte real encontrada em Y/2 e desprezıvel; por-
tanto, existe apenas a capacitancia shunt, calculada por C = Y2∗π∗f . Os valores
calculados estao apresentados na Tabela 2.3.
Tabela 2.3: Valores Calculados de Zc e γ do Modelo π-Equivalente do Cabo Umbi-lical
Z(Ω) Y (S) C(F )
0,1620439+0,0413987i 0,0000081i 0,0000001
0,1628556+0,0912803i 0,0000207i 0,0000002
0,1730773+0,2285152i 0,0000517i 0,0000002
0,1749768+0,2824554i 0,0000613 0,0000002
0,2346930+0,5370445i 00001251i 0,0000002
0,9017326+1,8749855i 0,0006252i 0.0000002
Estes valores serao aplicados ao modelo, sendo uma resistencia em serie com uma
indutancia e uma capacitancia shunt. As simulacoes com os efeitos do cabo na rede
16

serao apresentadas no Capıtulo 4.
Terminada a descricao e problematizacao da rede offshore, o proximo Capıtulo
se dedica a apresentar o Conversor em Matriz e caracterizar seus principais compo-
nentes.
17

Capıtulo 3
Topologias de Conversores em
Matriz
3.1 Introducao
O Conversor em Matriz (Matrix Converter) e uma topologia de conversor CA-
CA composta por chaves bidirecionais controladas que conectam diretamente uma
fonte qualquer com uma carga qualquer, sem o uso de componentes armazenado-
res, o que torna o conversor muito mais leve e menos volumoso. Ele pode ser do
tipo Convencional Direto (DMC) ou Indireto (IMC) , sendo que o Indireto possuiu
controle mais complexo e vantagens semelhantes, portanto, o foco sera dado ao tipo
DMC, que tem seu circuito de potencia apresentado na Figura 3.1.
A topologia aqui estudada sera a trifasico-trifasico – uma fonte de tensao trifasica
de entrada com corrente de saıda alimentando uma carga trifasica –, analogamente
a fonte de tensao que alimenta a plataforma e o motor de inducao que sera acionado.
O circuito de potencia contem nove chaves bidirecionais, que serao analisadas em
particular na Secao 3.4. Vale ressaltar que, por ter fluxo de energia bidirecional, o
Conversor tambem pode alimentar uma carga com tensao trifasica a partir de uma
fonte de corrente trifasica.
Os primeiros estudos a respeito dos Conversores em Matriz foram feitos por
18

Figura 3.1: Circuito de potencia do Conversor em Matriz Direto Trifasico paraTrifasico
Venturini e Alesina em 1980 [13], que apresentaram a nova topologia e propuseram
uma tecnica de controle [14], chamada de “Solucao Basica de Modulacao”, que
sera descrita em 4.2.1. No entanto, durante muitos anos, esse tipo de conversor
foi pouco estudado e aperfeicoado, principalmente pelo fato de que a ausencia de
elementos armazenadores torna as estrategias de modulacao um tanto complicadas.
Apenas recentemente novos trabalhos [15], [16], [17] foram publicados e tecnicas de
controle mais eficientes foram desenvolvidas, tornando possıvel a aplicacao desses
conversores.
Essa retomada de interesse na Eletronica de Potencia aos estudos dessa topo-
logia justifica-se pelas inumeras vantagens em se utilizar um Conversor em Matriz.
Este conversor possui circuito de potencia compacto devido a ausencia de elo CC,
forma de ondas praticamente senoidais de corrente e tensao na entrada e saıda com
harmonicos de baixa ordem, fluxo de energia bidirecional – operacao nos quatro
quadrantes –, fator de potencia controlavel – o que permite a operacao com fator
de potencia unitario para qualquer carga –, tensao gerada variavel sem restricao de
frequencia e operacao em todos os quatro quadrantes.
No entanto, a grande desvantagem desta topologia e que, como nao existe
capacitor, o chaveamento tem de ser muito bem controlado de forma a evitar
curto-circuitos e sobretensoes, garantindo que as correntes que alimentam a
carga indutiva nunca serao interrompidas e que a fonte de entrada nunca sera
19

curto-circuitada. E de responsabilidade do controle, tambem, garantir reducao
da influencia na carga das entradas destorcidas e desequilibradas. Alem disso,
existe o problema da robustez questionavel das chaves bidirecionais, que sera
melhor discutido adiante. Outro ponto importante, tambem, e que a razao de
transferencia de tensao e limitada a 0,866 – ou seja, a amplitude da tensao
de saıda e 86,6% da tensao de entrada –, devido a ausencia dos componentes
armazenadores. Tais motivos fazem com que, na maioria das aplicacoes, seja mais
barato e simples trabalhar com a topologia do VSI [18] ou outras, que tambem
apresentam formas de onda de entrada e saıda senoidais e fator de potencia unitario.
Vale ressaltar que o problema do limite da razao de transferencia pode ser
solucionado usando tecnicas de sobremodulacao [19] na entrada do Conversor;
porem, isso gera distorcao nas correntes de entradas e, portanto, nao sera utilizada
nas simulacoes deste trabalho.
Alem da topologia Trifasico para Trifasico existem tambem outras topologias
de Conversor em Matriz, como a forma em cascata, que e recomendavel para
aplicacoes em altas potencias.
Por fim, existem dois grandes desafios ao se projetar um Conversor em Matriz.
O primeiro e matematico, ainda no ambito teorico: trata-se da escolha de uma
tecnica de controle favoravel, que nao seja tao complexa e ao mesmo tempo efi-
ciente. Tal escolha sera justificada na Secao 4.2. O segundo e na montagem em
bancada do conversor, pois as chaves bidirecionais, caso nao sejam controladas, iso-
ladas e manipuladas de forma correta, podem causar problemas ao conversor. Os
questionamentos a respeito das chaves serao debatidos na Secao 3.4.
20

3.2 Filtro de Entrada
Apesar de o Conversor em Matriz nao requerer componentes reativos para ar-
mazenamento de energia, costuma-se usar um filtro de entrada fazendo a interface
entre a rede eletrica e o conversor, como mostra a Figura 3.2.
Va
Vb
Vc
Filtro de
Entrada
Conversor em Matriz
VA
VB
VC
Motor de Indução
Figura 3.2: Esquema do Conversor em Matriz com Filtro de Entrada Conectado aoMotor de Inducao
Algumas topologias possıveis para o filtro, encontradas na literatura, estao apre-
sentadas na Figura 3.3, onde o aterramento ilustrado e apenas um exemplo, ja que
nao ocorre no caso da rede submarina proposta no trabalho. A escolha da topologia
ideal deve levar em conta as caracterısticas operacionais do conversor em matriz
projetado. No caso do conversor proposto neste trabalho, as simulacoes serao fei-
tas com o filtro do tipo LC de segunda ordem, por ter melhor aplicacao pratica de
acordo com [20].
No entanto, tal filtro nao e essencial ao funcionamento do conversor, o que sera
provado no Capıtulo 4, onde estao apresentadas simulacoes sem filtro de entrada.
Entretanto, o filtro e bastante util pois reduz a injecao de harmonicos na rede cau-
sados pelas correntes descontınuas provenientes da comutacao das chaves, que pode-
riam resultar em distorcoes na tensao da rede (vgrid), afetando a operacao do sistema
CA. Ele tambem atua na filtragem das tensoes de saıda, que poderiam causar sobre-
aquecimento do motor acionado ou outras falhas no caso de possuırem harmonicos
presentes. Outra contribuicao importante do filtro e evitar mudancas bruscas na
tensao de entrada do conversor durante cada ciclo de chaveamento. Seu tamanho e
inversamente proporcional a frequencia da portadora da modulacao PWM .
21

Figura 3.3: Topologias de Filtro de Entrada para Conversor em Matriz a) ConexaoEstrela b) Filtro LC de segunda ordem c) Filtro LC com Resistor paralelo
Caso opte-se pelo uso do filtro, alguns pontos devem ser considerados na escolha
da sua topologia, como citado em [21] :
1. Defasagem entre a corrente de entrada no filtro e a tensao de fase: A tensao
de fase na entrada e proporcional a capacitancia CF ; portanto, o fator de
potencia na entrada (cosϕin) aumenta a medida que a capacitancia diminui.
Por essa razao, deve-se escolher um valor mınimo para CF , nao se esquecendo
do fato de que um baixo CF necessita de um LF maior, para que a frequencia
de corte do filtro (fc) nao se altere, causando um aumento da impedancia de
saıda do filtro e, consequentemente, da queda de tensao nele, resultando em
instabilidade.
2. Capacidade de Reducao de harmonicos na corrente de entrada e tensao de
saıda: Para que haja essa reducao, a frequencia de modulacao (fsw) deve
ser maior que fc, e menores sao os valores de capacitancia e indutancia, me-
lhorando a qualidade da tensao de saıda e corrente de entrada. No entanto,
deve-se lembrar que a frequencia de modulacao e limitada pelas perdas em
comutacao.
3. Caracterısticas da corrente em LF e tensao em CF : A tensao no capacitor CF
(vCF) e aproximadamente igual a vgrid, que, geralmente, e muito alta. Por-
tanto, e necessario escolher um capacitor de prolipropileno - material capaz de
resistir a altas tensoes - e de classe X - feito para ser conectado em modo flutu-
ante diretamente a rede, onde nao ha possibilidade de falha da rede causando
22

choque eletrico -, ja que a conexao entre os capacitores nao esta aterrada.
Capacitores do tipo X2: ate 2,5kV (aplicacoes residenciais, industriais, etc.);
Capacitores do tipo X1: resistem a picos na rede de ate 4kV (aplicacoes in-
dustriais).
4. Ressonancia no filtro e escolha do resistor : Deve-se ter precaucao ao escolher
o resistor RD em paralelo no filtro LC, pois, apesar de levar a uma reducao
dos picos de ressonancia em torno da frequencia de corte, reduzindo os efeitos
ressonantes e as chances de haver sobretensao, essa resistencia tambem causa
o efeito de tornar o conversor mais estavel, pois piora a atenuacao em torno
de fsw.
Considerando que a tensao e a corrente de entrada ficam em fase virtual-
mente atraves dos limites de potencia, sendo Vgrid, Vin, Igrid e Iin as componentes
harmonicas fundamentais a 60Hz [18]:
cosϕin > 0, 9 para Pout > 10%Pnom (3.1)
tanϕin >ICF
Iin= VgridωinCF0, 1
Pout3Vin
(3.2)
Para operacao com fator de potencia unitario, o valor de CFmax e obtida da
equacao 3.2. Quanto maior a potencia de saıda, maior o valor de CFmax :
CF < CFmax =Pnom tanϕin
3ωinV 2in
(3.3)
Como mencionado acima, a tensao de entrada do Conversor em Matriz deve ser
aproximadamente igual a tensao na rede Vgrid, portanto,
Vin = Vgrid − IinZdrop; ICF<< Iin (3.4)
Onde
23

Zdrop =RdωinLF
√ω2inL
2F +R2
d
R2d + ω2
inL2F
(3.5)
Considerando agora que a potencia de entrada no Conversor em Matriz e igual
para todas as fases e que nao ha perdas, ou seja, a potencia de saıda e igual a de
entrada, entao
Iin =Pout3Vin
=−3Vgrid +
√(−3Vgrid)2 − 12PoutZdrop−6Zdrop
(3.6)
E preciso levar em conta, tambem, que sempre ha uma pequena parcela de
corrente reativa demanda por CF :
ICF=
VinZCF
' VgridZCF
= VgridωinCF (3.7)
Onde
Igrid = Iin + jICF(3.8)
Apesar de a insercao do filtro fazer com que o conversor nao seja totalmente
livre de componentes reativos, em [22] observa-se que o filtro para o Conversor em
Matriz sera sempre menor do que o necessario para o retificador PWM de ordem
equivalente. No entanto, como citado no inıcio, este filtro nao e necessario para
o perfeito funcionamento do Conversor – caracterıstica desejavel no caso da trans-
missao submarina – e este efeito sera comprovado em simulacao mais adiante em
5.3.2.
3.3 Clamp Circuit
Em aplicacoes praticas e montagens em bancada, pode haver a ocorrencia de
sobretensoes no lado de entrada do Conversor – devido a perturbacoes na linha –,
ou no lado de saıda – devido a sobrecorrentes. Isso pode ocorrer no momento em
que, ao se desligarem as chaves (interrompendo a corrente), a energia armazenada na
24

indutancia do motor e descarregada. Essas possıveis sobretensoes sao extremamente
perigosas no conversor em matriz pois, ja que ele nao possui o link CC, qualquer
problema na entrada e enviado diretamente para as correntes de entrada do motor
e vice-versa.
Por essa razao e recomendavel adicionar-se uma protecao extra contra sobre-
tensoes, para evitar a destruicao dos semicondutores. Essa protecao e o circuito
chamado de Clamp Circuit, que e um tipo especial de circuito composto de diodos
utilizado para limitar ou segurar (do ingles Clamp) a tensao de saıda a um valor
especificado.
A configuracao [23] mostrada na Figura 3.4 e composta de 12 diodos de recu-
peracao rapida para conectar o capacitor aos terminais de entrada e saıda.
SaA SaB SaC
SbA SbB ScC
ScA SbC ScC
Va
Vb
Vc
A B C
Circuito Clamp
Figura 3.4: Circuito Clamp para Protecao
Outras configuracoes podem ser encontradas na literatura, como utilizar 6 diodos
das chaves bidirecionais para reduzir o numero de diodos do circuito para 6, ou ate
mesmo nao se utilizando o circuito clamp, colocando varistores conectados aos lados
de entrada e saıda e um circuito extra protegendo cada semicondutor.
Este trabalho nao tem como objetivo a montagem em bancada e, portanto, nao
serao feitas maiores analises do circuito de protecao clamp, tendo sido mencionado
apenas por motivos de documentacao.
25

3.4 Chaves Bidirecionais
O objetivo e comprovar a escolha do Conversor em Matriz para aplicacao nas
redes offshore com simulacoes computacionais, nao sendo realizados testes em ban-
cada. Por essa razao, foi-se utilizado nas simulacoes do Capıtulo 5 a chave bidirecio-
nal fornecida pelo software PSIM©, nao sendo necessaria, portanto, a modelagem
da mesma por meio de componentes unidirecionais. Entretanto, a tıtulo de registro,
nesta secao sera apresentada a chave bidirecional e suas principais caracterısticas.
Todas as chaves bidirecionais do Conversor em Matriz devem ser capazes de
conduzir correntes e bloquear tensoes em ambas as polaridades, pelos motivos ja
discutidos em 3.1. Infelizmente nao existe um dispositivo que realize essa funcao;
portanto, e preciso implementar a celula de uma chave bidirecional a partir de com-
ponentes semicondutores discretos unidirecionais disponıveis. Nesta analise sera
considerado apenas o IGBT (Insulated Gate Bipolar Transistor) , porem outros com-
ponentes como o MOSFET (Metal Oxide Semiconductor Field-Effect Transistor) , o
MCT (MOS Control Tyristors) e IGCT (Integrated Gate Commutated Thyristors)
tambem podem ser utilizados, dependendo da modelagem e aplicacao do conversor
[24]. Esta secao tratara da escolha da celula da chave bidirecional implementada e
os calculos a respeito de suas perdas.
3.4.1 Configuracoes da Celula Bidirecional
As chaves bidirecionais podem ser implementadas de cinco maneiras diferentes,
cada uma com suas particularidades e vantagens, caracterizadas abaixo.
1. Dois IGBT’s antiparalelos na configuracao emissor-comum: Na configuracao
emissor-comum ilustrada na Figura 3.5, dois IGBT’s e dois diodos – res-
ponsaveis pelo bloqueio reverso de corrente – sao conectados em antiparalelo.
As vantagens dessa configuracao sao que, alem de se fazer possıvel controlar
corrente nas duas direcoes de conducao, os dois IGBT’s podem ser referenci-
ados ao mesmo ponto (mesmo emissor comum); entao este acaba sendo um
26

no terra local para a chave bidirecional. Como apenas dois componentes sao
usados para conduzir a corrente ao mesmo tempo, as perdas neste caso sao
pequenas. A desvantagem e que cada chave bidirecional requer uma fonte de
alimentacao isolada para ter funcionamento adequado, pois quando ela esta
conduzindo o emissor-comum assume o potencial da fase da saıda, fazendo com
que nao seja possıvel referenciar todas as chaves para o mesmo ponto comum
[24]. Sao necessarias, portanto, nove fontes isoladas.
Figura 3.5: Configuracao da Celula Bidirecional de Dois IGBT’s em Modo Emissor-comum Antiparalelo
2. Dois IGBT’s antiparalelos na configuracao coletor-comum: Na configuracao
coletor-comum da Figura 3.6 sao necessarias apenas seis fontes isoladas, ja
que tres dos IGBT’s tem o emissor conectado a mesma fase de entrada, que
acaba sendo um no terra local para eles. Os outros tres IGBT’s tem o emissor
conectado a mesma fase de saıda, que tambem sera um no terra para eles,
isolado do no terra dos anteriores. Essa configuracao se repete para as demais
fases de entrada e saıda, resultando num total de seis fontes isoladas. Em
relacao as perdas em conducao, sao as mesmas da configuracao emissor-comum
[24].
27

Figura 3.6: Configuracao da Celula Bidirecional de Dois IGBT’s Modo Coletor-comum Antiparalelo
3. Dois RB-IGBT’s conectados em antiparalelo: Esta configuracao utiliza os se-
micondutores chamados de RB-IGBT (Reverse-Blocking IGBT) (Figura 3.7)
e sua principal vantagem e que eles apresentam menos perdas em conducao, se
comparado a todas as configuracoes ja comentadas, por terem uma topologia
mais simples e nao necessitarem de diodos discretos, tendo menos semicondu-
tores [24]. No entanto, as perdas de comutacao sao maiores e a capacidade de
recuperacao reversa dos RB-IGBT’s ainda nao e totalmente robusta.
Figura 3.7: Configuracao da Celula Bidirecional com Dois RB-IGBT’s em Antipa-ralelo
4. Ponte de diodo monofasica: A ponte de diodo monofasica contem um IGBT
em seu centro e possui a vantagem de possibilitar a conducao de corrente
em ambas as direcoes, utilizando-se o mesmo semicondutor, sendo apenas um
driver do gate necessario para cada chave. Porem, esta configuracao apresenta
28

a desvantagem de que as perdas em conducao se tornam extremamente altas, ja
que para cada caminho de conducao de corrente havera proporcional queda de
tensao em tres componentes, que estao conduzindo permanentemente, como
pode-se ver na Figura 3.8. Alem disso, nao e possıvel controlar a direcao
que a corrente percorre em cada chave, o que e extremamente necessario nos
principais metodos de comutacao, como sera mostrado em 4.1.2, fazendo com
que esta configuracao seja pouco utilizada [24].
Figura 3.8: Configuracao da Celula Bidirecional de Ponte de Diodo Monofasica
5. Modulos integrados do circuito de potencia: Como mostrado na Figura 3.9, os
modulos integrados do circuito de potencia [18] ja sao produzidos comercial-
mente como o EconoMAC da EUPEC [25], compactando todo o circuito em
apenas um pacote. A principal vantagem desses modulos integrados e que as
indutancias de dispersao nos caminhos de comutacao de corrente podem ser
minimizadas e as desvantagens sao o alto custo e a limitacao de potencia de
operacao.
Figura 3.9: Modulo Integrado EconoMAC
29

Como as configuracoes Ponte de Diodo e RB-IGBT’s e o Modulo Integrado nao
sao muito utilizadas devido as desvantagens expostas, geralmente opta-se pelas confi-
guracoes emissor-comum e coletor-comum. Na pratica, nao e muito viavel a operacao
com apenas seis fontes isoladas, especialmente devido a indutancias de dispersao.
Portanto, geralmente utiliza-se a configuracao emissor-comum, que foi a escolhida
para simulacao no presente trabalho.
Apos a escolha da configuracao mais adequada e necessario, tambem, anali-
sar determinados parametros dos IGBT’s utilizados como a tensao maxima de
coletor-comum (VCES), as correntes maximas do coletor nominal (ICnom) e repe-
titiva (TCpRM), tensao maxima de gate (VGES), a capacitancia de entrada (CIies), as
tensoes de saturacao dos IGBT’s (VCEsat) e diodos (VDsat) a temperatura maxima
de operacao (Tvj) e a energia dissipada na recuperacao reversa do diodo (Erec).
3.4.2 Calculo das Perdas nos Semicondutores
As perdas em comutacao e conducao mencionadas anteriormente sao os
parametros principais que determinam a durabilidade de um semicondutor [26],
pois estas estao diretamente relacionadas a temperatura que ele vai operar. Para
o calculo de tais perdas, pode-se considerar uma fase U qualquer do conversor. A
corrente nessa fase vai ditar a soma das correntes em cada um dos IGBTs existen-
tes nesta fase. Sendo iIGBT+ a corrente instantanea positiva e iIGBT− a corrente
instantanea negativa que circula nas chaves bidirecionais, pode-se escrever que a
corrente da fase U e seu valor RMS sao dados por [24]:
iU = iIGBT+(SRU ) + iIGBT−(SRU ) + ...+ iIGBT−(STU ) (3.9)
e
I2U = I2rmsIGBT+(SRU ) + I2rmsIGBT−(SRU ) + ...+ I2rmsIGBT−(STU) (3.10)
Os termos da (3.10) tem mesmo valor, pois as comutacoes sao distribuidas
30

uniformemente. A corrente em cada chave sera, portanto:
IrmsIGBT =1√6IrmsIGBTph (3.11)
Utilizando o valor da corrente dado por (3.11), as perdas de conducao de cada
IGBT e dos diodos podem ser calculadas como a seguir, sendo RCE a parte resistiva
do IGBT e RD a parte resistiva do diodo.
PrIGBT =RCEI
2rmsIGBTph
6(3.12)
PrD =RDI
2rmsIGBTph
6(3.13)
E preciso considerar tambem as perdas devido as quedas de tensao nas chaves de
uma fase causadas pelas correntes circulando em cada uma delas que, juntas, dao
origem a corrente de saıda daquela fase. Tais perdas sao dadas por:
Pvph =1
π
∫Kv
√2Irmsph sin θdθ (3.14)
Onde Kv sera a tensao de saturacao do coletor-emissor para os IGBTs e a tensao
de saturacao do diodo e o angulo θ = ωt e a velocidade angular da corrente de uma
das fases de saıda do conversor. Resolvendo essa integral, tem-se que as perdas sao:
PvIGBT=
2
3[VCEsat
√2Irmsphπ
] (3.15)
PvD =2
3[VDsat
√2Irmsphπ
] (3.16)
Tambem e valido calcular as perdas em comutacao dos componentes. No caso
dos IGBTs elas sao dadas pelas perdas quando estes estao conduzindo e quando nao
estao conduzindo. Nos diodos, elas sao proporcionais a capacidade de recuperacao
reversa do mesmo. Considerando fcom a frequencia de comutacao e Eon, Eoff e Erec
os valores de perdas quando os IGBTs estao ligados, desligados e de recuperacao
31

reversa dos diodos dados pelo fabricante, pode-se calcular as perdas em comutacao
por:
Pcomon = fcomEon (3.17)
Pcomoff= fcomEoff (3.18)
Pcomrec = fcomErec (3.19)
Esses valores de perda que os fabricantes fornecem sao dados para condicoes
especıficas. As correcoes lineares sugeridas por eles para se adequar as condicoes do
projeto, tomando esses valores como base, nao levam ao real valor das perdas nos
conversores. De forma aproximada, pode-se calcular as perdas medias Eon, Eoff e
Erec usando os valores medios das correntes nas chaves e nos diodos em uma fase,
durante meio perıodo (< i >p h).
< i >IGBT=< i >D=< i >p h
3=
0, 636Imaxph
3= 0, 3Irmsph (3.20)
Finalizadas as descricoes dos principais componentes do Conversor em Matriz,
o proximo Capıtulo trata de um resumo dos metodos de comutacao e controle do
chaveamento do Conversor e da escolha do metodo adotado.
32

Capıtulo 4
Estrategias de Comutacao e
Controle do Conversor em Matriz
O principal desafio do Conversor em Matriz, alem da implementacao da chave
bidirecional, e desenvolver uma estrategia de controle que seja confiavel e segura,
para evitar o problema mencionado na Secao 3.1 das sobretensoes e sobrecorrentes
causados por eventuais erros de chaveamento. Por essa razao, este trabalho focou-se
em adotar um metodo de controle que fosse simples, eficaz e robusto. A seguir estao
descritas as estrategias de comutacao de corrente e metodos de controle utilizados
no conversor em matriz e desenvolvimento equacional do metodo adotado.
4.1 Comutacao de Corrente
A comutacao de corrente nos Conversores em Matriz e uma tarefa complexa, pois,
os chaveamentos devem ser feitos de forma que evitem curto-circuitos na entrada e
interrupcoes de corrente na saıda, que acarretaria em sobretensoes que destruiriam
o conversor [22]. Sendo assim, duas linhas de entrada nunca devem ser conectadas
a mesma linha de saıda e cada linha de saıda deve sempre estar conectada a uma
linha de entrada, ilustrado na Figura 4.1.
Na pratica, os semicondutores nao chaveiam instantaneamente, sendo impossıvel
a sincronia exata entre as chaves na entrada e saıda. Deve ser considerado tambem
33

o tempo morto de cada um, gerando perıodos de sobreposicao e ausencia de chave-
amentos. Essas questoes devem ser tratadas a cada comutacao, para que respeitem
o princıpio de funcionamento que sera descrito na Subsecao 4.1.1.
Carga
Carga
Figura 4.1: Esquemas de Conexoes que nao podem ocorrer entre a Entrada e Saıdade Duas Fases
Esta secao, portanto, trata-se da apresentacao de como deve ser feita a comutacao
dos semicondutores do conversor, analise das estrategias de comutacao e justificativa
da escolha da estrategia escolhida.
4.1.1 Princıpio de Funcionamento
Retomando a observacao da topologia na Figura 3.1, considerando que as tensoes
na fonte de entrada (vi) e na carga (vo) estao referenciadas ao terra da fonte, pode-se
escreve-las em dois vetores
vi =
va(t)
vb(t)
vc(t)
, vo =
vA(t)
vB(t)
vC(t)
(4.1)
Assim como as correntes de entrada e saıda, denominadas respectivamente ii e
io:
34

ii =
ia(t)
ib(t)
ic(t)
, io =
iA(t)
iB(t)
iC(t)
(4.2)
Iniciando com a analise da posicao de cada chave em relacao a fase de entrada e
saıda, tendo em mente as consideracoes necessarias para evitar sobretensoes e sobre-
correntes, o chaveamento deve ser feito de forma que, sendo SkJ a chave localizada
na fase de entrada k = a, b, c e fase de saıda J = A,B,C, pode-se escrever
SkJ =
1, se chave SkJ fechada
0, se chave SkJ aberta
(4.3)
E, respeitando as restricoes apontadas, existem 27 posicoes possıveis de chave-
amento, sendo que a cada ciclo so tera uma chave fechada por fase de saıda, ou
seja
SaJ + SbJ + ScJ = 1, J = A,B,C (4.4)
Dessa forma, a saıda esta conectada a fase a quando a chave superior esta ligada;
a fase b quando a do meio esta ligada e, similarmente, a fase c quando a inferior esta
ligada. Portanto, utilizando as equacoes 4.1 e 4.3, as tensoes de entrada e saıda em
funcao das posicao das chaves e
vA(t)
vB(t)
vC(t)
=
SaA(t) SbA(t) ScA(t)
SaB(t) SbB(t) ScB(t)
SaC(t) SbC(t) ScC(t)
va(t)
vb(t)
vc(t)
⇒ vo = T · vi (4.5)
Onde T e chamado de matriz de transferencia instantanea.
35

Seguindo o mesmo raciocınio para as correntes de entrada e saıda dadas por 4.2,
tem-se [27]
ii = T T · io (4.6)
Onde T T e a matriz transposta de T .
Portanto, os valores instantaneos de saıda em relacao a entrada sao dados pelas
equacoes 4.5 e 4.6.
Em seguida a analise da posicao das chaves, tem-se a observacao do padrao de
chaveamento, que segue o modelo descrito na Figura 4.2.
Tseq (um período)
SaA=1 SbA=1 ScA=1
SaB=1 SbB=1 ScB=1
SaC=1 ScC=1SbC=1
Figura 4.2: Grafico Ilustrativo do Padrao de Chaveamento
O tempo em que cada chave SkJ ficara na posicao 1 ou 0 – respectivamente
ligada ou desligada – sera modulado pelo ciclo de trabalho (dkJ(t)) de cada uma,
utilizando as funcoes de chaveamento das mesmas, onde
dkJ(t) =tkJTseq
onde 0 < dkJ < 1 (4.7)
Sendo tkJ o tempo em cada chave fica ligada e Tseq o tempo total em um perıodo.
E importante ressaltar que essa analise pressupoe uma alta frequencia de cha-
36

veamento (≈ 5kHz) e baixa frequencia da tensao de saıda (≈ 60Hz), que pode ter
sua amplitude e frequencia variaveis.
Sendo assim, as equacoes 4.5 e 4.6 pode ser reescritas, onde D(t) e a matriz de
transferencia de baixa frequencia
vo(t) = D(t) · vi(t) (4.8)
ii(t) = D(t)T · io(t) (4.9)
4.1.2 Estrategias de Comutacao de Corrente
A seguir serao descritas as estrategias de comutacao de corrente encontradas na
literatura e posteriormente analisada a estrategia escolhida para o presente trabalho.
Comutacao usando Tempo Morto
E possıvel a construcao de Conversores em Matriz utilizando a estrategia de
tempo morto [28], onde durante certo perıodo nenhuma das celulas sao ligadas,
gerando um circuito aberto temporario na carga, que quebra as regras basicas apre-
sentadas em 4.1.1. Caso isso seja feito, e necessario prover um caminho alternativo
para a corrente da carga, utilizando-se circuitos Snubbers ou Clamp para limitar as
excursoes de tensoes nodais. Alem dessa limitacao gerar perdas a cada comutacao –
por aumentar o numero de componentes e, consecutivamente, das quedas de tensao
neles – e aumentar o volume do conversor, tambem existe o problema das chaves
bidirecionais tornarem complicado o desenvolvimento do circuito Snubbers.
No entanto, essa tecnica pode ser aceitavel se a frequencia das comutacoes for
minimizada, consequentemente minimizando o tempo morto necessario, como foi
desenvolvido em [29].
37

Comutacao usando Sobreposicao de Corrente
Assim como a estrategia descrita em 4.1.2, esta tambem requer circuitos extras
para evitar a destruicao do conversor. Aqui a proxima celula e ligada antes de a
anterior ser ligada, causando um curto-circuito temporario na entrada. Para que
isso seja possıvel e necessario uma indutancia extra na linha para que o aumento da
corrente causado pelo curto-circuito seja mais lento, evitando a sobrecorrente.
Alem dos indutores utilizados para esse fim serem extremamente grandes e caros,
outro problema dessa estrategia e que o tempo de chaveamento aumenta, o que pode
gerar problemas de controle.
Comutacao em Quatro Passos
A conhecida Comutacao em Quatro Passos (4-step commutation strategy), pro-
posta pela primeira vez em [30], e uma estrategia mais confiavel e requer que a
configuracao escolhida para as celulas semicondutoras, descritas em 3.4.1, possibi-
lite o fluxo de corrente em ambas as direcoes, de forma que a direcao da corrente
seja possıvel de ser controlada. Ela nao depende do algoritmo de controle utilizado,
sendo mais geral.
Assume-se que, quando uma fase de entrada e conectada a uma de saıda, ambos
os IGBT’s da celula deve ser ligados. A Figura 4.3 mostra a sequencia de comutacao
descrita a seguir, de uma chave SaA qualquer para outra SbA qualquer, por exemplo,
onde SaA1 e SaA2 correspondem aos dois IGBT’s que formam uma celula bidirecional,
assim como SbA1 e SbA2.
Os IGBT’s tem um tempo finito necessario para ligar e desligar e os sinais de
chaveamento tem um tempo de propagacao diferente, o que faz com que nao seja
possıvel a comutacao simultanea da chave SaA para SbA. Assumindo Va¿Vb, se SaA1
e ligado antes de SaA2 desligar, uma corrente de curto-circuito comeca a circular entre
as duas fases de entrada. Para resolver esse problema, os sinais tem que ser enviados
de forma a respeitar as combinacoes de estado de chaveamento da Tabela 4.1, onde
1 significa ligado e 0 significa desligado.
38

1100
1000
0100
1010
0101
0010
0001
0011
IL>0
IL<0
RegimePermanente
Transitório RegimePermanente
1111
= SaA1= SaA2= SbA1= SbA2
Figura 4.3: Esquema de Comutacao em Quatro Passos de Duas Celulas Bidirecionais
Estado SaA1 SaA2 SbA1 SbA2 Sinal de IL
1 1 1 0 0 +-
2 0 0 1 1 +-
3 1 0 0 0 +
4 0 1 0 0 -
5 0 0 1 0 +
6 0 0 0 1 -
7 1 0 1 0 +
8 0 1 0 1 -
Tabela 4.1: Combinacoes dos Estados dos Componentes
39

Nesse esquema de combinacoes de estados dos componentes, a comutacao natural
ocorre em 50% de todas as comutacoes e, portanto, essa comutacao de corrente e
chamada de “chaveamento Semisoft”.
4.2 Revisao das Estrategias de Controles
Uma das partes mais problematicas e cruciais no desenvolvimento do Conversor
em Matriz e o seu controle. Isso se deve, em primeiro lugar, ao fato de que a cada
ciclo de chaveamento precisa-se atualizar nove ciclos de trabalho. Segundo, porque
as formas de onda de controle precisam ser sincronizadas com as formas de onda de
entrada. Terceiro porque quaisquer distorcoes nas formas de onda de entrada sao
refletidas na saıda com frequencia diferente, gerando sub-harmonicos. E, finalmente,
porque imprecisoes no tempo podem resultar em distorcao das formas de ondas.
Por sua natureza bidirecional, pode ser escolhido para ser controlada a onda de
entrada ou saıda; porem, devido a ausencia de componentes armazenadores, nao se
pode controlar ambas – entrada e saıda – simultaneamente. No caso de um motor,
por exemplo, controla-se a saıda e se existir qualquer distorcao na entrada, a tensao
de saıda vai permanecer senoidal, porem a corrente de entrada continuara distorcida.
Um caso analogo e o controle de reativos na entrada, perdendo-se o controle da saıda.
Como mencionado em 3.1, a limitacao do Conversor em Matriz e que a razao
maxima entre a tensao de saıda pela de entrada que pode ser obtida e de 86,6%
– desde que foi proposto em [14] –, pois a maior tensao pico-a-pico de saıda nao
pode ser maior que a menor diferenca entre duas fases da tensao de entrada. Para
atingir esse maximo de 86,6% e necessario usar completamente a tensao de entrada,
o que se consegue com a introducao de terceiros harmonicos das frequencias de
entrada e saıda na tensao de saıda ou outras tecnicas, como a sobremodulacao [31]
que aumenta a tensao, mas torna o controle bastante complexo e causa queda de
qualidade na forma de onda de tensao de saıda.
A seguir sera apresentado um resumo dos metodos de modulacao utilizados para
controlar o Conversor em Matriz e entao sera desenvolvida uma analise mais deta-
40

lhada da estrategia de controle adotada, a Carrier Based PWM.
4.2.1 Resumo dos Metodos de Modulacao
De forma geral, os metodos de modulacao do Conversor em Matriz sao divididos
em Direto e Indireto. Nos metodos diretos, propostos por Alesina e Venturini em
[13], as componentes de saıda sao obtidas multiplicando as componentes de entrada
e uma matriz de modulacao. Ja nos metodos indiretos, o Conversor em Matriz e
analisado como um retificador trifasico conectado a um inversor por um elo CC
virtual. Cada um dos metodos de modulacao possui um limite para amplitude de
tensao de saıda e um numero de comutacoes por perıodo de chaveamento. Uma
breve passagem pelos metodos sera feita a seguir.
Metodo de Modulacao de Venturini
Tambem conhecido como “Solucao Basica de Modulacao”, proposto pela pri-
meira vez por Alesina e Venturini em [32], esta solucao e classificada como Metodo
Direto e so funciona para baixas frequencias (da ordem de 60Hz), onde em cada Tseq
a tensao de saıda e igual a tensao demandada pela carga.
voN =taJva + tbJvb + tbJvb
Tseq(4.10)
Considerando as tensoes de entrada dadas e correntes de saıda desejadas
vi = Vim
cos(ωit)
cos(ωit+ 2π/3)
cos(ωit+ 4π/3)
, io = Iom
cos(ωot+ ϕo)
cos(ωot+ ϕo + 2π/3)
cos(ωot+ ϕo + 4π/3)
(4.11)
Deve-se encontrar uma matriz de modulacao M(t) que satisfaca as seguintes
relacoes, respeitando as condicoes da equacao 4.4.
41

vo = qVim
cos(ωot)
cos(ωot+ 2π/3)
cos(ωot+ 4π/3)
, ii = Iom
cos(ωit+ ϕi)
cos(ωit+ ϕi + 2π/3)
cos(ωit+ ϕi + 4π/3)
(4.12)
Onde q e o ganho de tensao entre as formas de onda de entrada e saıda [33] . A
primeira solucao e dada pela equacao abaixo, onde ωm = (ωo − ωi).
M1 = 1/3
1 + 2q cos(ωmt) 1 + 2q cos(ωmt− 2π/3) 1 + 2q cos(ωmt− 4π/3)
1 + 2q cos(ωmt− 4π/3) 1 + 2q cos(ωmt) 1 + 2q cos(ωmt− 2π/3)
1 + 2q cos(ωmt− 2π/3) 1 + 2q cos(ωmt− 4π/3) 1 + 2q cos(ωmt)
(4.13)
Que leva a uma desfasagem igual na entrada e saıda ϕi = ϕo. A segunda solucao e
dada pela proxima equacao, onde ωm = −(ωo + ωi).
M2 = 1/3
1 + 2q cos(ωmt) 1 + 2q cos(ωmt− 2π/3) 1 + 2q cos(ωmt− 4π/3)
1 + 2q cos(ωmt− 4π/3) 1 + 2q cos(ωmt− 4π/3) 1 + 2q cos(ωmt)
1 + 2q cos(ωmt− 2π/3) 1 + 2q cos(ωmt) 1 + 2q cos(ωmt− 2π/3)
(4.14)
Onde a defasagem entre entrada e saıda e ϕi = −ϕo. A combinacao das duas
solucoes da a media para o controle do fator de deslocamento do Conversor. O
calculo dos tempos de chaveamento utilizando essa matriz e complicado de ser im-
plementado. Por isso, para um fator de deslocamento de entrada unitario, pode-se
expressar a funcao de modulacao por
MkJ =tkJTs
= [1/3 +2vk.vJ
3.V 2im
] (4.15)
42

Nas duas solucoes 4.13, 4.14, as tensoes da carga devem caber nas tensoes de
entrada para qualquer frequencia, o que limita a razao maxima de tensao q para
50%.
Metodo de Modulacao de Venturini Otimizado
A estrategia em 4.2.1 tem o problema de a tensao de saıda ser limitada a, no
maximo, 50% da tensao de entrada. Em [32] foi apresentada a tecnica de injecao
de terceiro harmonico, que aumenta a tensao de saıda de 50% para 86,6% da tensao
de entrada adicionando-se tensao de modo-comum a saıda, como pode ser visto a
seguir.
vo = qVim
cos(ωot)− 1
6cos(3ωot) + 1
2√3
cos(3ωit)
cos(ωot+ 2π/3)− 16
cos(3ωot) + 12√3
cos(3ωit)
cos(ωot+ 4π/3)− 16
cos(3ωot) + 12√3
cos(3ωit)
(4.16)
Considerando fator de potencia unitario, a funcao de modulacao pode ser escrita
por
MkJ =tkJTs
= [1/3 +2vk.vJ
3.V 2im
+4q
9√
3sin(3ωit+ βk) sin(3ωit)] (4.17)
Onde βk = 0, 2π/3, 4π/3.
As tensoes adicionadas somadas se cancelam, isto e, nao alteram as tensoes de
linha, mas redistribuem todos os estados nulos de saıda do conversor, que acontecem
quando todas as saıdas estao conectadas a mesma entrada. Isso e analogo ao que e
feito para conversores PWM convencionais, com elo CC. E importante ressaltar que,
para qualquer metodo de modulacao, o valor maximo intrınseco da amplitude da
tensao de saıda e de 86,6% [13] para conversores trifasico-trifasico, na regiao linear
de modulacao.
43

Modulacao Escalar
Os metodos de Venturini apresentados anteriormente sao complexos do ponto de
vista computacional. Motivados por isso, foi proposta por Roy [34] a Modulacao
Escalar, onde os sinais de chaveamento sao calculados diretamente medindo-se as
tensoes de entrada a cada perıodo de amostragem e calcula-se a magnitude, razao e
posicao do vetor de tensao diretamente.
Primeiro, adiciona-se o subescrito m na entrada que tem polaridade diferente
das outras duas. Depois, adiciona-se o subescrito l na menor das duas entradas,
em valor absoluto, e k na na terceira entrada. Dessa forma, utilizando a tecnica de
adicao da tensao de modo-comum para aumentar a tensao de saıda para 86,6%, os
ciclos de trabalho das chaves sao dados por
mlJ =(vJ − vm)vl
1, 5V 2im
mkJ =(vJ − vm)vk
1, 5V 2im
mmJ = 1− (mlJ +mkJ), para J = A,B,C
(4.18)
Expressando de forma equivalente a equacao 4.17, os ciclos de trabalho de
modulacao podem ser escritos como
MkJ =tkJTs
= [1/3 +2vk.vJ
3.V 2im
+4q
9√
3sin(3ωit+ βk) sin(3ωit)] (4.19)
Esse metodo permite que a magnitude e angulo da tensao de saıda, assim como
a razao entre ela e a tensao de entrada, sejam atualizados a cada perıodo de chave-
amento, que e essencial para o controle em malha fechada.
Vale notar que, para as tensoes maximas de saıda (q =√32
= 86, 6%), as equacoes
4.17 e 4.19 sao identicas, apenas se diferem no termo em senos. No metodo Modular
esse termo esta fixo no seu maximo, ja no de Venturini esse termo varia com o valor
de q. Essa caracterıstica so apresenta diferencas em frequencias de chaveamento
baixas, da ordem de 60Hz.
44

Modulacao Vetorial PWM − Space Vector Modulation
Os metodos de modulacao PWM sao largamente utilizados nos inversores con-
vencionais, seja por metodos de portadora (Carrier-Based Methods) ou por metodo
de modulacao vetorial SVM , proposto em [35], sendo que ambos tem a capacidade
de controlar totalmente o fator de potencia de entrada.
O metodo vetorial para Conversores em Matriz [16] controla completamente o
vetor tensao de saıda e angulo de deslocamento da corrente de entrada e baseia-se
em representar as correntes e tensoes de entrada e saıda em vetores, de forma que
apenas 21 das 27 combinacoes possıveis de chaveamento sao utilizadas.
As primeiras 18 configuracoes (duas linhas de saıda conectadas a uma das linhas
de entrada) determinam os vetores tensao de saıda (com magnitude dependente das
tensoes de entrada) e corrente de entrada (que depende das correntes de linha de
saıda), sao os chamados Vetores Ativos. Sendo a = exp(j2φ/3) o vetor de tensao de
saıda Vo(t) descrito abaixo tem comprimento constante igual a√
3qVim, frequencia
angular de rotacao ωo, amplitude variavel e direcao fixa, ocupando posicoes a φ/3
rad de diferenca e e sintetizado fazendo-se medias de vetores adjacentes de saıda em
cada perıodo de amostragem.
vo(t) = 2/3(vab + avbc + a2vca) (4.20)
As ultimas 3 configuracoes (todas linhas de saıda conectadas a uma linha de
entrada) sao chamados Vetores Zero e determinam os vetores de corrente de entrada
zero e tensao de saıda zero, ou seja, localizados na origem, como mostra a Figura 4.4.
Figura 4.4: Vetores de Corrente e Tensao Representando as Combinacoes de Cha-veamento
As outras 6 configuracoes (cada linha de saıda conectada a uma linha de entrada
45

diferente) nao sao usadas pois os vetores de saıda sao constantes em amplitude,
girando a frequencia angular de entrada. Os vetores ativos podem ser subdivididos
dependendo de qual tensao de linha de saıda for zero.
Em todos os instantes de amostragem, as referencias sao o vetor tensao de saıda
(vo) e angulo de deslocamento da corrente de entrada (φo). Como o vetor tensao
de entrada (vi) de linha e conhecido (fonte de tensao), o lado da entrada pode
ser controlado pelo angulo de fase do vetor corrente de entrada (φi). Tanto o vetor
corrente de entrada quanto tensao de saıda sao sintetizados considerando-se os ciclos
de trabalho das chaves, calculados a partir das vetores referencia de fase da tensao
de saıda e corrente de entrada [35], como mostrado a seguir, nde q e o ındice de
modulacao.
δ+1 = q2/√
3 sin(ϕo + φ/6) cos(ϕi + φ/6) (4.21a)
δ−3 = q2/√
3 sin(ϕo + φ/6) cos(ϕi − φ/2) (4.21b)
Para obter as configuracoes de chaveamento para outros pares de setores angu-
lares, basta aplicar o mesmo procedimento. Dessa forma, o valor maximo de tensao
de saıda em relacao a de tensao q =√
3/2 e alcancado ao se considerar injecao de
terceiro harmonico e a soma dos ciclos de trabalho sao maiores que zero e menores
que 1, como desejado.
δ+1 + δ−3 + δ−4 + δ+6 ≤ 1 (4.22)
Modulacao Carrier-Based PWM
A estrategia Carrier-Based PWM e uma adaptacao aos Conversores em Matriz
[17] da tecnica SPWM , onde uma onda portadora triangular de alta frequencia (vtri)
e comparada com um sinal de referencia senoidal de referencia (vo) e os pulsos de
chaveamento sao gerados utilizando-se uma tabela logica como funcao das tensoes
de entrada e nıveis desejados na saıda, como mostrado abaixo, onde para qualquer
condicao fora da tabela, o estado logico marcado e zero.
46

Condicao Valor
va > vb xa = 1
vb > vc xb = 1
vc > va xc = 1
Tabela 4.2: Estados da Tensao de Entrada do Metodo PWM
O padrao de geracao de pulso, de acordo com a tabela 4.2, segue a equacao a
seguir, onde L1 e L0 sao os nıveis de tensao de saıda, sendo L0 selecionado se a
referencia e menor ou igual a zero e L1 se a saıda for maior que zero.
N = 16xa + 8xb + 4xc + 2L1 + L0 (4.23)
Esse metodo e bastante simples em comparacao com o vetorial, porem tambem
apresenta boa resposta dinamica e baixa ressonancia do filtro de entrada [27].
Outros Metodos de Modulacao
Recentemente, novos metodos de modulacao estao sendo desenvolvidos para
aplicacao em conversores em matriz, como a estrategia DTC (Direct Torque Con-
trol) e PC (Predictive Control) . Um breve resumo, sem desenvolvimento teorico
agucado dos mesmos, sera feito a seguir.
O DTC ja esta bem estabelecido nos inversores convencionais, tendo torque e
metodo de controle de fluxos de alta performance para maquinas CA. Ele se baseia
na equacao de torque da maquina e nas mudancas na tensao entregue pelo inversor,
que afetam diretamente o comportamento do fluxo da maquina. Esse metodo foi
proposto em conversores em matriz pela primeira vez em [27] e, diferentemente do
seu uso em inversores, nao basta apenas utilizar Look-up Table, uma complexidade
extra e adicionada pois o projetista precisa ter a nocao de como cada estado de
chaveamento ira influenciar o fator de potencia de entrada do conversor. Apesar
de ter apresentado boa performance dinamica, outra desvantagem e que o filtro de
47

entrada possui alta ressonancia, o que faz com que essa estrategia ainda esteja em
estudo.
Ja o Controle Preditivo [36] pode ser baseado em corrente ou torque e utiliza os
modelos do conversor e da carga para prever o comportamento futuro das correntes
e potencia reativa, atraves de uma funcao de qualidade. A cada perıodo de amos-
tragem, todas as 27 possıveis posicoes de chaveamento sao usadas para calcular os
valores preditivos da carga e da corrente de entrada, selecionando-se a que produz
menor valor da funcao de qualidade. Essa estrategia tem boa resposta dinamica e
ainda esta em estudo para aplicacoes comerciais futuras.
4.3 Modelagem Matematica do Metodo de Con-
trole Carrier-Based PWM
Ao se fazer a escolha quanto ao metodo de controle a ser usado no Conversor em
Matriz para a rede offshore, os criterios adotados foram simplicidade, efetividade e
robustez. Por esses motivos, foi escolhido o Metodo Carrier-Based PWM. Essa es-
trategia de modulacao foi apresentada em 4.2.1 e sera discutida em detalhes a seguir.
Neste metodo, tensoes offset sao usadas para gerar tensao de referencia de saıda por
polo, que serao posteriormente comparadas com uma portadora descontınua para
gerar os sinais de chaveamento. O metodo torna-se simples por nao ter calculos
complexos ou uso de Lookup Table, mas tem as desvantagens de que as referencias
offset adicionadas e os sinais de portadora descontınuos dificultam o entendimento
do processo de modulacao. Alem disso, o algoritmo sofre uma certa dificuldade
para alcancar o maximo da amplitude de saıda (86,6%), sendo necessario o uso de
sobremodulacao. E importante ressaltar que as tensoes de saıda equivalentes as de
entrada sao obtidas a custos de distorcoes nas correntes de entrada.
Nos conversores convencionais com eloCC, as tensoes de entrada podem ser −Vd,
0 ou +Vd. Ja nos conversores em matriz, as tensoes de entrada sao as proprias tensoes
CA da rede. As tensoes e correntes de entrada e saıda sao relacionadas pelos ciclos
48

de trabalho das chaves atraves das equacoes 4.8 e 4.9, que representam os intervalos
onde cada chave permanece fechada, como mostrado na subsecao 4.1.1.
O ponto de partida para a modulacao e separar a frequencia de entrada da
tensao de saıda, pois e desejavel que a frequencia, amplitude e fase da carga sejam
independentes dos parametros da fonte. Sendo as tensoes de entrada dadas por
va(t)
vb(t)
vc(t)
=
V cos(ωt)
V cos(ωt− 2π3
)
V cos(ωt− 4π3
)
(4.24)
A tensoes de saıda serao dadas pela equacao 4.8 que, desenvolvida, fica
vA(t)
vB(t)
vC(t)
=
daA(t) dbA(t) dcA(t)
daB(t) dbB(t) dcB(t)
daC(t) dbC(t) dcC(t)
va(t)
vb(t)
vc(t)
(4.25)
A partir daqui o foco consiste em desenvolver as equacoes para a fase A de saıda,
ja que as demais fases podem ser calculadas analogamente. O termo da tensao de
saıda vA(t) na equacao 4.25 e dado por:
vA(t) = daA(t)va(t) + dbA(t)vb(t) + dcA(t)vc(t) (4.26)
O proximo passo e utilizar uma estrategia conhecida como Link CC Virtual,
proposta pela primeira vez em [17], que e feito considerando que as tres tensoes
trifasicas equilibradas de entrada estao em referencial estacionario, enquanto que
as tensoes de saıda estao em referencial sıncrono. Dessa forma, o termo frequencia
da tensao de entrada e excluıdo da tensao de saıda, tornando-a independente da
frequencia de entrada.
Para que isso ocorra – analisando uma fase J qualquer – os ciclos de trabalho
daJ , dbJ , dcJ devem ser substituıdos por senoides com certa amplitude e defasagem,
para que, utilizando identidades trigonometricas, os termos com ω nas tensoes de
49

saıda se anulem. A amplitude de cada uma dessas senoides e dada por um termo
kJ(t) e o fator de potencia de entrada e dado por ρ. Para cada fase de saıda serao
necessarios tres ciclos de trabalho; portanto, tres senoides defasadas 3π/2, o que
resulta nas seguintes formas de onda
daJ = kJ cos(ωt− ρ) (4.27a)
dbJ = kJ cos(ωt− 2π/3− ρ) (4.27b)
dcJ = kJ cos(ωt− 4π/3− ρ) (4.27c)
Onde kJ(t) e o ındice de modulacao da portadora. Substituindo os valores da
equacao 4.24 na equacao 4.26, tem-se,
vA(t) =kA(t)V [cos(ωt) cos(ωt− ρ) + cos(ωt− 2π/3) cos(ωt− 2π/3− ρ)
+ cos(ωt− 4π/3) cos(ωt− 4π/3− ρ)] (4.28)
Utilizando identidades trigonometricas basicas, a equacao 4.28 pode ser simpli-
ficada por:
vA(t) = 3/2kA(t)V cos(ρ) (4.29)
Dessa forma, a equacao 4.29 resulta numa tensao de saıda independente da
frequencia de entrada, dependendo apenas de kA(t), ρ e da amplitude da tensao
de entrada (V ).
Para modular o sinal da portadora e gerar os sinais de controle das chaves, os
ındices de modulacao kA(t), kB(t) e kC(t) devem ser escolhidos como sinais variantes
no tempo que contem a frequencia desejada de saıda ωo e amplitude k da componente
fundamental da tensao de saıda. O que resulta, para as fases A, B e C em
50

kA(t) = k cos((ω)ot) (4.30a)
kB(t) = k cos((ω)ot− 2π/3) (4.30b)
kC(t) = k cos((ω)ot− 4π/3) (4.30c)
Portanto, aplicando as definicoes acima a equacao 4.29, tem-se que a tensao na
fase de saıda A e dada por
vA(t) =3
2kV cos(ρ) cos(ωot) (4.31)
Aplicacao do Offset Absoluta nos Duty Ratios
Aplicando os valores de kA(t), kB(t) e kC(t) dados por 4.30, os ciclos de trabalho
definidos em 4.27 tornam-se negativos no tempo, o que nao pode ser feito na pratica.
Em qualquer instante, a condicao de que o duty ratio deve estar entre 0 e 1 - dada
pela equacao 4.3 - deve ser satisfeita. Portanto, para que os ciclos de trabalho de
cada chave sejam sempre positivos, sao adicionados Offsets de valor absoluto neles,
lembrando que tais offsets devem ser iguais em todas as fases de saıda - para que o
vetor de tensao produzido por ele seja nulo na carga - so podendo, por isso, adicionar
tensoes de modo comum na saıda.
Da(t) = |kA cos(ωt− ρ)| (4.32a)
Db(t) = |kA cos(ωt− 2π/3− ρ)| (4.32b)
Dc(t) = |kA cos(ωt− 4π/3− ρ)| (4.32c)
Analisando a fase A de saıda, os duty ratios das chaves se tornam daA +
Da(t), dbA + Db(t)edcA + Dc(t). De acordo com 0 < daA + Da(t) < 1, ou seja,
0 < kA cos(ωt− ρ) + |kA cos(ωt− ρ)| < 1. Isso significa que para o pior caso tem-se
51

0 < 2|kA| < 1, ou seja, |kA| = k = 0.5. Substituindo na equacao 4.32
Da(t) = |0.5 cos(ωt− ρ)| (4.33a)
Db(t) = |0.5 cos(ωt− 2π/3− ρ)| (4.33b)
Dc(t) = |0.5 cos(ωt− 4π/3− ρ)| (4.33c)
Portanto, os ciclos de trabalho modificados para a fase A sao
daA = Da(t) + kA cos(ωt− ρ) (4.34a)
dbA = Db(t) + kA cos(ωt− 2π/3− ρ) (4.34b)
dcA = Dc(t) + kA cos(ωt− 4π/3− ρ) (4.34c)
Adicao de Tensoes de Modo-Comum nos Duty Ratios
Para aumentar a amplitude de kA(t), kB(t) e kC(t) de 0.5 para 0.57, deve-se usar
totalmente as tensoes de entrada, o que nao esta acontecendo, devido ao fato de
kA(t), kB(t) e kC(t) estarem em referencia senoidal trifasica. Para isso, adiciona-se
um termo de modo-comum igual a [−(max(kA, kBekC) + (min(kA, kBekC)))/2], de
acordo com os princıpios de SVM [37].
Alem disso, de acordo com a equacao 4.4, o somatorio dos ciclos de trabalho
em cada fase de saıda deve ser igual a 1 para que a fase de saıda nunca seja aberta.
Porem, o somatorio Da(t) +Db(t) +Dc(t) ≤ 1, portanto, mais uma tensao de modo
comum ∆ deve ser adicionada a Da(t), Db(t)eDc(t). Este termo nao afeta as tensoes
de saıda, ja que a tensao media por ciclo de chaveamento desse termo e zero.
∆ =1− (Da(t) +Db(t) +Dc(t))
3(4.35)
Outro ponto importante a se notar e que, ate entao, a tensao de entrada nao esta
sendo totalmente utilizada para produzir tensao de saıda, pois kA(t), kB(t) e kC(t)
52

estao em referencial senoidal. Isso e resolvido de forma similar ao princıpio imple-
mentado no “Carrier-based Space Vector Modulation”, adicionando-se um termo de
modo-comum igual a [(kA − (max(kA, kBekC)) + (min(kA, kBekC)))/2], o que faz
com que a amplitude k de kA, kBekC aumente de 0,5 para 0,5129 [38] e, portanto, o
ındice de modulacao se torna 3/2|kA| = 3/2.0, 5129 = 0, 769 = 76, 9%.
Com isso, os novos ciclos de trabalho para fase A de saıda sao
daA = Da(t) + ∆ + [(kA − (max(kA, kBekC)) + (min(kA, kBekC)))/2] cos(ωt− ρ)
(4.36a)
dbA = Db(t) + ∆ + [(kA − (max(kA, kBekC)) + (min(kA, kBekC)))/2] cos(ωt− 2π/3− ρ)
(4.36b)
dcA = Dc(t) + ∆ + [(kA − (max(kA, kBekC)) + (min(kA, kBekC)))/2] cos(ωt− 4π/3− ρ)
(4.36c)
Finalmente, os sinais de chaveamento dados pelo tempo de comutacao de cada
chave sao calculados pela intersecao, no tempo, das tensoes de referencia com uma
portadora, que e uma onda triangular. E valido observar que, como foi dito na
Secao 3.1, muitas vezes e utilizada a estrategia de sobremodulacao da tensao de
entrada, inclusive na tecnica Carrier-Based PWM. Neste trabalho esta nao foi uti-
lizada, porem, por fins de registro, ela sera descrita abaixo.
Sobremodulacao da Tensao de Entrada
Um dos obstaculos de aplicacao pratica do Conversor em Matriz, como ja men-
cionado, e que o ındice de modulacao da tensao de saıda e limitado em 0,5, fazendo
com que o modulo da tensao de saıda fique sempre menor que o da tensao de entrada.
Para transpor esta limitacao foi reportada pela primeira vez em [35] a estrategia
da sobremodulacao da tensao de entrada, que aumenta a tensao do elo CC fictıcio
disponıvel no conversor para a sıntese da tensao de saıda, aumentando a razao de
transferencia para alem de 0,7694.
53

Esse aumento da tensao do elo CC fictıcio e alcancado ao se gerar um vetor
ativo na regiao de sobremodulacao da entrada durante o tempo de chaveamento
parcial causado pelo termo ∆ da equacao 4.35. Isso e feito multiplicando-se os ciclos
de trabalho pelo termo instantaneo 1(Da(t)+Db(t)+Dc(t))
, de forma que a soma deles
(d′aA, d′bA, d
′cA) em um ciclo de chaveamento, sem adicionar o termo ∆, seja forcada
a ser sempre igual a um e nao mais variar entre√32
e 1. Os novos ciclos de trabalho
sao dados pelas equacoes abaixo.
d′aA =Da(t) + ∆ + [kA − (max(kA, kBekC) + (min(kA, kBekC)))/2] cos(ωt− ρ)
(Da(t) +Db(t) +Dc(t))
(4.37a)
d′bA =Db(t) + ∆ + [kA − (max(kA, kBekC) + (min(kA, kBekC)))/2] cos(ωt− 2π/3− ρ)
(Da(t) +Db(t) +Dc(t))
(4.37b)
d′cA =Dc(t) + ∆ + [kA − (max(kA, kBekC) + (min(kA, kBekC)))/2] cos(ωt− 4π/3− ρ)
(Da(t) +Db(t) +Dc(t))
(4.37c)
Apesar do benefıcio de elevar a razao de transferencia, essa sobremodulacao
traz, no entanto, a desvantagem de gerar a adicao de harmonicos de baixa ordem
nas correntes de entrada e tensoes de saıda. Isso faz com essa topologia perca uma
de suas principais caracterısticas vantajosas, que e justamente o fato de ter poucos
harmonicos de baixa ordem. Por isso, a sobremodulacao nao foi considerada na
estrategia de controle utilizada neste trabalho.
Feita a modelagem matematica do controle escolhido para o Conversor em Ma-
triz, o proximo Capıtulo se dedicara a analise das simulacoes computacionais da
topologia e seu controle no acionamento de um motor de inducao.
54

Capıtulo 5
Simulacoes Computacionais e
Analises
5.1 Introducao
Utilizando o desenvolvimento teorico e equacional do Conversor em Matriz feito
no Capıtulo 4, serao apresentadas na Secao 5.2 as modelagens computacionais no
software PSIM© em diagramas de bloco das equacoes descritas na Secao 4.3 e suas
respectivas formas de ondas, que foram compatıveis com as propostas em [38]. O
PSIM© foi escolhido por possuir em seu modulo SimCoder a praticidade de gerar
o codigo a ser utilizado nos microprocessadores que acionam as chaves automati-
camente, facilitando o acionamento das mesmas no caso de utilizacao pratica em
bancada do Conversor.
Posteriormente, simulacoes no domınio do tempo de diferentes topologias serao
analisadas na Secao 4.3, com o objetivo de analisar o Conversor em Matriz e com-
provar a possibilidade de sua implantacao em aguas profundas.
Alem disso, ja que o Conversor do presente trabalho sera projetado para o aci-
onamento de motores trifasicos partindo-se de uma rede trifasica de alimentacao,
sera simulada a topologia trifasico para trifasico alimentando uma carga indutiva,
com desenvolvimento e resultados apresentados na Secao 5.3.
55

Apos validado o modelo com carga indutiva serao feitas simulacoes utilizando
a modelagem de motor disponıvel no PSIM©, com resultados apresentados na
Secao 5.4. Para comprovar a confiabilidade do controle desenvolvido, um curto-
circuito fase-fase entre as fases de entrada a e b e simulado durante o regime per-
manente do motor. Em caso de falta, o ideal e que o controle do conversor detecte
essa anomalia e desligue o sistema.
Com a comprovacao por simulacao da robustez do controle realizado para o
acionamento do motor de inducao, em 5.4.3 sera feita a analise da rede submarina,
adicionando-se o modelo do cabo umbilical conectando a subestacao na plataforma
ao conversor em aguas profundas.
5.2 Modelo Computacional do Controle Carrier-
Based PWM
Ao desenvolver um modelo computacional do Conversor em Matriz no PSIM©
e necessario modelar as equacoes desenvolvidas na Secao 4.3 em diagramas de bloco.
Tais diagramas serao apresentados nesta Secao, juntamente com as formas de onda
relativas as equacoes de controle, apenas para a fase A de saıda, para simplificar a
analise.
Inicialmente, foi necessario inserir um circuito PPL (Phase Locked Loop) [39],
que e um sistema de sincronizacao cuja funcao e gerar um sinal de sincronismo em
fase com o sinal da componente fundamental do sinal de entrada a ser utilizado no
controle. Neste caso, os sinais de entrada utilizado no PLL sao as tensoes de entrada
va, vb e vc, indicados na Figura 5.1.
56

Figura 5.1: Circuito PLL do Controle do Conversor em Matriz
O valor utilizando e o “Theta–PLL”(Figura 5.2), que e o sinal de sincronismo a
ser utilizado na modelagem dos duty ratios das chaves.
0.85 0.9 0.95 1 1.05
Time (s)
2
4
6
Theta_pll
Figura 5.2: Grafico do Sinal de Sincronismo do PLL
Os duty ratios a serem utilizados para comparar com a portadora e obter os
sinais de chaveamento sao descritos nas equacoes 4.37 e sao compostos dos valores
dos termos ∆, Da(t), Db(t)eDc(t), kA, kB e kC e cos(ωt). Cada uma dessas partes
deve ser modelada em diagrama de blocos. Na Figura 5.3 sao apresentados os
diagramas referentes aos sinais kA, kB e kC da equacao 4.30, que sao os responsaveis
pela modulacao da frequencia de saıda desejada.
57

Figura 5.3: Diagrama de Blocos dos Sinais kA, kBekC
Os sinais obtidos de kA, kB e kC sao mostrados na Figura 5.4 e, como esperado,
tem modulo 0,5 e frequencia 60Hz, como foi modulada nessa simulacao.
1.08 1.1 1.12 1.14
Time (s)
0
-0.2
-0.4
0.2
0.4
ka kb kc
Figura 5.4: Grafico dos Sinais de kA, kBekC
Tambem e necessario utilizar esses sinais kA, kB e kC para modelar o termo
(max(kA, kBekC) +min(kA, kBekC)), apresentados na Figura 5.5.
58

Figura 5.5: Diagrama de Blocos da Soma dos Valores Maximos e Mınimos dekA, kBekC
Com esses sinais, ja pode-se fazer a montagem dos duty ratios, ilustrados na
Figura 5.6.
Figura 5.6: Diagrama de Blocos dos Duty Ratios das Chaves
Nesse diagrama de blocos tambem e utilizando o sinal ∆, obtido pelo diagrama
em separado na Figura 5.7.
59

Figura 5.7: Diagrama de Blocos do Sinal ∆
Pode-se notar, de acordo com as equacoes 4.32, que os sinais Da(t), Db(t) e Dc(t)
sao modulos de senoides, portanto, seu grafico deve apresentar apenas parte positiva
e amplitude igual a 0,5. De fato, pode ser visto na Figura 5.8 que o grafico atende
ao esperado.
1.08 1.1 1.12 1.14
Time (s)
0
0.2
0.4
Da Db Dc
Figura 5.8: Graficos dos Sinais Da(t), Db(t) e Dc(t)
E valido tambem analisar o grafico de Da(t) + Db(t) + Dc(t) e comparar com o
sinal apresentado em [17]. A Figura 5.9 mostrar o sinal desejado.
60

1.08 1.1 1.12 1.14
Time (s)
0.86
0.88
0.9
0.92
0.94
0.96
0.98
1
Da+Db+Dc
Figura 5.9: Grafico da Soma dos Sinais Da(t), Db(t) e Dc(t)
Por fim, os duty ratios comparados com a onda triangular portadora na Mo-
dulacao PWM geram os sinais de chaveamento 5kHz de frequencia para as chaves
bidirecionais. Na Figura 5.10 observa-se em detalhe a modulacao para a fase A de
saıda.
0
0.2
0.4
0.6
0.8
1
Vsoma Vtriangular daA+dbA dcA
0.9879 0.988 0.9881 0.9882 0.9883
Time (s)
0
0.2
0.4
0.6
0.8
1
maA mbA mcA
Figura 5.10: Grafico dos Sinais Utilizados na Modulacao PWM
5.3 Conversor em Matriz Trifasico para Trifasico
Utilizando a topologia trifasico para trifasico, a partir da qual foram desenvolvi-
das as equacoes do Capıtulo 3, serao simulados os circuitos com o controle Carrier
Based PWM para os casos do conversor com filtro de entrada e sem filtro de entrada,
com uma carga indutiva. As formas de onda das correntes e tensoes de entrada e
61

saıda serao ilustradas. Os parametros em todos os casos sao 220V, 60Hz de entrada
na fonte e frequencias desejadas de 2Hz, 20Hz, 50Hz, 60Hz, 120Hz e 500Hz na saıda
da carga de 10Ω de resistencia e 10mH de indutancia, simulando o motor de inducao,
e uma frequencia de chaveamento de 5kHz.
5.3.1 Conversor em Matriz Trifasico para Trifasico com Fil-
tro de Entrada
O circuito de potencia do conversor conectado a uma carga indutiva represen-
tando o motor e com filtro de entrada esta ilustrado na Figura 5.11.
Figura 5.11: Circuito de Potencia do Conversor Acionando uma Carga Indutiva
O objetivo e que esse conversor seja capaz de acionar motores de velocidades
variadas e, portanto, o conversor deve prover formas de onda esperadas para qualquer
frequencia de saıda desejada. Por essa razao, serao analisadas algumas frequencias
de 2Hz a 500Hz.
Iniciando a analise com frequencia desejada de saıda a 60Hz, a Figura 5.12 ilustra
as correntes de saıda do motor em tal situacao.
62

0.6 0.65 0.7 0.75 0.8
Time (s)
0
-20
-40
20
IA IB IC
Figura 5.12: Graficos das Correntes de Saıda com Modulacao da Frequencia de Saıdaa 60Hz
E valida a comparacao com a Figura 5.13, que mostra as correntes de entrada
da rede a 60Hz.
0.6 0.65 0.7 0.75 0.8
Time (s)
0
-10
-20
10
20
Ia Ib Ic
Figura 5.13: Graficos das Correntes de Entrada com Modulacao da Frequencia deSaıda a 60Hz
Uma frequencia interessante a ser analisada e a 50Hz, por ter uso comercial em
diversos paıses. A Figura 5.14 ilustra essa situacao, com as correntes de entrada da
Figura 5.13 anterior.
63

0.6 0.65 0.7 0.75 0.8
Time (s)
0
-20
-40
20
40
IA IB IC
Figura 5.14: Graficos das Correntes de Saıda com Modulacao da Frequencia de Saıdaa 50Hz
Para observar-se o efeito da diminuicao da frequencia de saıda, pode-se analisar
a frequencia 20Hz na Figura 5.15.
0.6 0.65 0.7 0.75 0.8
Time (s)
0
-20
-40
20
40
IA IB IC
Figura 5.15: Graficos das Correntes de Saıda com Modulacao da Frequencia de Saıdaa 20Hz
E tambem a frequencia 2Hz na Figura 5.16. Ambas as figuras mostram que as
formas de onda se mantem adequadas ao acionamento de um motor de inducao.
64

0.6 0.8 1 1.2 1.4
Time (s)
0
-20
-40
-60
20
40
IA IB IC
Figura 5.16: Graficos das Correntes de Saıda com Modulacao da Frequencia de Saıdaa 2Hz
Da mesma forma que foi analisada a resposta do conversor em frequencias me-
nores, pode-se analisar o que ocorre ao aumentar a frequencia de saıda desejada.
Com a frequencia em 120Hz na Figura 5.17, as correntes de saıda continuam com a
forma esperada.
0.6 0.65 0.7 0.75 0.8
Time (s)
0
-20
20
IA IB IC
Figura 5.17: Graficos das Correntes de Saıda com Modulacao da Frequencia de Saıdaa 120Hz
Ao aumentar para 500Hz (Figura 5.18), que e uma frequencia interessante em al-
guns esquemas de rede de transmissao e acionamento [1], as formas de onda tornam-
se mais ruidosas. Isso ocorre devido as limitacoes dos semicondutores e a natureza
indutiva do sistema descrito.
65

0.56 0.58 0.6 0.62
Time (s)
0
-5
-10
5
10
IA IB IC
Figura 5.18: Graficos das Correntes de Saıda com Modulacao da Frequencia de Saıdaa 500Hz
5.3.2 Conversor em Matriz Trifasico para Trifasico sem Fil-
tro de Entrada
Foi mencionado na Secao 3.2 que o filtro de entrada melhora a qualidade das
formas de onda obtidas com a implementacao do conversor na rede; no entanto, seu
uso nao e obrigatorio. A Figura 5.19 ilustra a topologia simulada sem o filtro de
entrada.
Figura 5.19: Conversor em Matriz Trifasico para Trifasico sem Filtro de Entrada
Na Figura 5.20 pode-se observar o resultado da simulacao das correntes de saıda
do conversor com frequencia de acionamento desejada igual a 60Hz.
66

0.6 0.65 0.7 0.75 0.8
Time (s)
0
-20
-40
20
IA IB IC
Figura 5.20: Graficos das Correntes de Saıda com Modulacao da Frequencia de Saıdaa 500Hz sem Filtro de Entrada
Ao se comparar com o grafico onde foi utilizado filtro, pode-se concluir que as
formas de onda sao equivalentes, provando que nao e necessario o uso do filtro de
entrada em modelos computacionais. O mesmo padrao de similaridade se manteve
para as demais frequencias de modulacao.
5.4 Conversor em Matriz Trifasico para Trifasico
com Acionamento do Motor de Inducao
Trifasico
Apos analisadas as formas de onda resultantes da simulacao do conversor alimen-
tando uma carga indutiva, e preciso garantir que o controle continue funcionando ao
se acionar um motor de inducao trifasico, em analogia ao empregado na exploracao
de petroleo. Portanto, usando o modelo computacional do motor disponıvel no
PSIM©, foi simulado o conversor acionando o motor de inducao na Figura 5.21.
67

Figura 5.21: Simulacao do Acionamento de um Motor de Inducao
As caracterısticas do motor usado na simulacao estao descritas na Tabela 5.1.
Tabela 5.1: Caracterısticas do Motor Utilizado na Simulacao
Parametro Valor
Rs 0,294Ω
Ls 1,39mH
Rr 0,156Ω
Lr 0,74mH
Lm 41mH
N o Polos 4
Velocidade Nominal 1800rpm
Tensao Nominal 220v 3ϕ
Corrente Nominal 10A
5.4.1 Analise do Comportamento do Motor Trifasico de
Inducao em Regime Permanente
A velocidade de um motor e relacionada com a frequencia da rede em que ele
esta conectado pela seguinte formula, sendo n a velocidade do motor em rpm, f a
frequencia da alimentacao em Hz e P o numero de polos do motor:
68

n =120.f
P(5.1)
Portanto, de acordo com os dados da Tabela 5.1, a velocidade do motor simulado
em regime permanente deve ser igual a:
n =120.60
4n = 1800rpm (5.2)
O maior interesse no acionamento do motor e que a sua velocidade mantenha-
se como a esperada ao se modelar a frequencia de saıda do conversor modulada.
Neste caso, a frequencia de saıda foi 60Hz e a resposta da velocidade do motor e
apresentada na Figura 5.22. Pode-se observar que apos o transitorio de partida, o
motor alcanca a velocidade de 1800rpm em regime permanente, como era esperado,
a partir de aproximadamente 1,9 segundos de simulacao.
0 0.5 1 1.5 2 2.5 3
Time (s)
0
-500
500
1000
1500
2000
Veloc
Figura 5.22: Grafico da Velocidade do Motor a 60Hz
Ainda com frequencia de saıda a 60Hz, a Figura 5.23 mostra as correntes de
saıda do motor IA, IB e IC onde pode-se observar a diferenca entre as corrente de
partida do motor e correntes em regime permanente.
69

0 0.5 1 1.5 2 2.5 3
Time (s)
0
-100
-200
100
200
IA IB IC
Figura 5.23: Grafico das Correntes de Saıda do Motor a 60Hz
O detalhe da variacao de amplitude das correntes pode ser visto na Figura 5.24.
Durante a partida, as correntes em cada fase tem modulo aproximadamente 110A,
enquanto em regime permanente elas caem para 10A, isto e, elas sao cerca de 10
vezes maior na partida, o que e aceitavel para o motores de inducao.
1.6 1.7 1.8 1.9 2
Time (s)
0
-50
-100
50
100
IA IB IC
Figura 5.24: Grafico em Detalhe das Correntes de Saıda do Motor a 60Hz
Os valores medios e RMS das correntes de saıda do motor sao expostos nas
medidas do grafico da Figura 5.25 para as correntes de saıda.
70

2.1 2.12 2.14 2.16 2.18
Time (s)
0
-10
-20
10
20
IA IB IC
Figura 5.25: Grafico com Valores Medios e RMS das Correntes de Saıda do Motora 60Hz
Tambem pode-se analisar os valores medios e RMS das correntes de entrada
da rede. Nota-se que esses valores sao bastante proximos, mostrando que a cor-
rente obtida na saıda e quase a mesma que a da entrada no Conversor, que e uma
caracterıstica desejavel.
2.7 2.72 2.74 2.76 2.78 2.8
Time (s)
0
-2
-4
2
Ia Ib Ic
Figura 5.26: Grafico com Valores Medios e RMS das Correntes de Entrada da Redea 60Hz
De forma a complementar a analise, as tensoes de saıda tambem podem ser vistas
na Figura 5.27.
71

1.94 1.96 1.98 2
Time (s)
0
-100
-200
100
200
VA VB VC
Figura 5.27: Grafico das Tensoes de Saıda do Motor a 60Hz
Seus valores de RMS sao apresentados na Figura 5.28 sao apresentados os valores
das tensoes de saıda.
2.82 2.84 2.86 2.88 2.9 2.92 2.94
Time (s)
0
-100
-200
100
200
va vb vc
Figura 5.28: Grafico com Valores RMS das Tensoes de Saıda do Motor a 60Hz
Ja a Figura 5.29 mostra os valores referentes as tensoes de entrada.
72

2.82 2.84 2.86 2.88 2.9 2.92 2.94
Time (s)
0
-100
-200
100
200
VA VB VC
Figura 5.29: Grafico com Valores RMS das Tensoes de Entrada da Rede a 60Hz
Uma analise interessante a se fazer e a respeito da chamada razao de transferencia
entre as tensoes de entrada e saıda. Pode-se observar pelo resultado abaixo que,
como nao foi usada sobremodulacao, a tensao atingiu a razao esperada de ≈ 87%.
VAVa
=127V
146V≈ 87% (5.3)
Uma das grandes vantagens do Conversor em Matriz e que sua aplicacao acarreta
em harmonicos de baixa ordem nas correntes de entrada, fazendo com que a rede
eletrica nao seja prejudicada com tais distorcoes, que costumam ser muito comuns
no uso de semicondutores. Portanto, e valido analisar se essa caracterıstica esta
sendo obtida com o controle adotado. Para isso, foram analisadas (Figura 5.30) as
FFTs das correntes de entrada e saıda da rede, apresentando os harmonicos presentes
nessas formas de onda e suas respectivas ordens.
73

0 2000 4000 6000 8000 10000
Frequency (Hz)
0
20
40
60
Ia Ib Ic
Figura 5.30: Analise das FFT nas Correntes de Entrada do Motor a 60Hz
E desejavel que a saıda do Conversor tambem possua pouca distorcao harmonica,
ja que eles produzem esforcos adicionais nos eixos dos motores, perdas no seu nucleo
e tambem podem afetar sua isolacao. A Figura 5.31 mostra a FFT das correntes de
saıda, que tambem possuem poucos harmonicos, assim como a entrada.
0 5000 10000 15000 20000
Frequency (Hz)
0
2
4
6
8
IA IB IC
Figura 5.31: Analise das FFTs nas Correntes de Saıda do Motor a 60Hz
Tanto as formas de onda de entrada quanto as de saıda nao possuem grande
distorcao harmonica, como era previsto, ja que elas se mostraram senoides quase
perfeitas. Uma analise mais clara e feita quando se mede o THD , que e uma
medida da distorcao harmonica total presente na senoide. Quanto menor o THD,
menor a distorcao harmomica e mais reduzidos sao os efeitos de picos de corrente,
aquecimento, etc. Os valores de THD nas correntes de entrada estao mostrados na
Figura 5.32.
74

2.4 2.6 2.8 3 3.2 3.4 3.6
Time (s)
0
-0.5
-1
0.5
1
Ia Ib Ic
Figura 5.32: Valores de THD nas Correntes de Entrada do Motor a 60Hz
Ja o THD das correntes de saıda estao apresentados Figura 5.33 e sao baixos
assim como os da entrada, comprovando que nao deve haver problemas na rede e
nem no motor com o uso do Conversor em Matriz.
Figura 5.33: Valores de THD nas Correntes de Saıda do Motor a 60Hz
A proxima analise realizada foi a respeito das potencias que fluem da rede para
a carga e o esquematico para a analise esta apresentado na Figura 5.34.
75

Figura 5.34: Circuito para Medicao de Potencia Instantanea na Entrada e Saıda doConversor em Matriz
As equacoes usadas para modelar essas medicoes sao descritas abaixo.
Pentrada = Va.Ia + Vb.Ib + Vc.IcPsaida = VA.IA + VB.IB + VC .IC (5.4)
E as potencias instantaneas de entrada na rede e saıda no motor (Figura 5.35)
adquiridas sao exatamente iguais e seu valor e 2393,6W.
2.822 2.824 2.826 2.828 2.83 2.832 2.834
Time (s)
0K
-1K
-2K
-3K
1K
2K
3K
Pfiltro Pmotor
Figura 5.35: Valores de Potencia Instantanea na Entrada e Saıda do Conversor emMatriz
Outra analise importante e a respeito do fator de potencia. Por comparacao dos
graficos, pode-se observar na Figura 5.36 que tensao e corrente de entrada estao em
fase, ou seja, o fator de potencia e unitario, como esperado.
76

59
0
-10
-20
10
20
Ia Ib Ic
0.51 0.52 0.53 0.54 0.55
Time (s)
0
-100
-200
100
200
va vb vc
(A) (A) (A)
(V)(V) (V)
Figura 5.36: Graficos de Tensao e Corrente de Entrada no Conversor
As analises acima confirmam que a topologia do Conversor e apropriada para
o acionamento de um motor de inducao trifasico, ja que apresenta poucas perdas,
formas de onda senoidais, baixos harmonicos e fator de potencia igual a 1, como
esperado de acordo com a teoria na literatura.
5.4.2 Analise do Comportamento do Motor em Ocorrencia
de Curto-circuito Fase-Fase na Rede
E importante realizar testes que assegurem a estabilidade do sistema desenvol-
vido e garanta que o conversor e capaz de suportar possıveis falhas na rede. Para isso,
foi feita a simulacao de um curto circuito fase-fase entre as fases A e B de entrada
apos 3s de simulacao, sendo o regime permanente atingido em aproximadamente 2s,
com o motor a vazio, como mostra a Figura 5.37.
77

60
0 1 2 3 4
Time (s)
0
0.5
1
1.5
2
Vsomasign
2
1,5
1
0,5
0
Tempo (s)
01 2 3 4
Figura 5.37: Sinal da Chave para Simular um Curto-circuito Fase-fase
As correntes da entrada do Conversor antes e apos o curto sao apresentadas
na Figura 5.38. Pode-se observar que as correntes aumentam apos a ocorrencia do
curto, porem nao chega nem proximo do valor da corrente de partida, podendo-se
considerar que o sistema permaneceu estavel, apesar das ondas se tornarem menos
senoidais, com mais ruıdos.
78

61
1 1.5 2 2.5 3 3.5
Time (s)
0
-50
50
Ia Ib Ic
250
-50
Tempo (s)0 1 2 3 3,51,5 2,5
0
Figura 5.38: Grafico das Correntes de Entrada Apos Curto-Circuito Fase-Fase
A Figura 5.39 mostra em detalhes a variacao de corrente descrita, ilustrando que
a corrente voltou a forma que possuıa em regime permanente.
79

59
3 3.2 3.4 3.6
Time (s)
0
-5
5
Ia Ib Ic
Figura 5.39: Detalhe das Correntes de Entrada no Conversor Apos Curto-CircuitoFase-Fase
As correntes de saıda do Conversor seguem um padrao similar as correntes de
entrada, onde apos o curto elas continuam com modulo de valor proximo ao valor
em regime permanente, como pode ser visto na Figura 5.40.
80

59
1 1.5 2 2.5 3 3.5
Time (s)
0
-50
-100
50
100
150
IA IB IC
Figura 5.40: Grafico das Correntes de saıda apos Curto-Circuito Fase-Fase
Essas correntes tambem retornam a sua configuracao em regime permanente,
apos o curto, em detalhes na Figura 5.41.
2.98 3 3.02 3.04 3.06 3.08 3.1
Time (s)
0
-10
10
IA IB IC
Figura 5.41: Detalhes das Correntes de Saıda Apos Curto-Circuito Fase-Fase
Devido a essa distorcao, e importante analisar a resposta da velocidade do motor
a essa variacao de corrente, que pode ser vista na Figura 5.42. Essa analise mostra
81

que a velocidade do motor permanece em 1800rpm, mesmo com a ocorrencia do
curto circuito, que e uma caracterıstica excelente para que as cargas acionadas por
ele nao deixem de ser atendidas, mesmo na presenca de falha.
0 1 2 3 4
Time (s)
0
-500
500
1000
1500
2000
Veloc
Figura 5.42: Grafico da Velocidade do Motor Apos Curto-Circuito Fase-Fase
Finalmente, pode-se afirmar que as analises feitas nessa Secao comprovam a
robustez do controle adotado para o acionamento de motores de inducao a vazio.
No entanto, precisa-se ter mente que em presenca de falta, o sistema deve ser iso-
lado para nao comprometer a seguranca dos equipamentos. A corrente saıda tem
configuracao que indica que o motor nao suportaria o torque de carga elevado, e
fatalmente entraria na regiao de instabilidade.
O proximo passo agora e observar e analisar o efeito da insercao do cabo umbilical
na rede offshore.
5.4.3 Conversor em Matriz Trifasico para Trifasico na Rede
Offshore
Na Secao 2.2 foi apresentado a descricao da modelagem aproximada do cabo
umbilical que conecta a subestacao de energia na plataforma ao Conversor acionado
em aguas profundas. Utilizando os valores calculados de impedancia em serie e
capacitancia shunt, foi simulado o circuito da rede offshore que conecta a subestacao
na plataforma - representada pela fonte - ao Conversor acionando o motor, com o
82

cabo umbilical conectado a ele. A Figura 5.43 apresenta o circuito simulado.
Cabo Umbilical
Filtro de Entrada do Conversor
Figura 5.43: Circuito de Potencia do Conversor em Matriz com o Cabo Umbilical
As analises aqui apresentadas serao feitas para os valores de capacitancia e im-
pedancia encontrados para modulacao a 60Hz e 120Hz de frequencia, podendo ser
estendidas para demais frequencias utilizando-se os valores calculados em 2.2. De
todo modo, o ma frequencia 60Hz e a mais importante a ser analisada nesse traba-
lho, ja que este e o valor de frequencia gerado no Brasil e o que sera transmitido
da subestacao. A funcao do Conversor e justamente alterar esse valor para os equi-
pamentos da rede submarina. Portanto, a Figura mostra as correntes de saıda do
Conversor com a insercao do cabo umbilical na rede simulada.
2.24 2.26 2.28 2.3 2.32 2.34 2.36
Time (s)
0
-100
-200
100
200
Ilinhaa Ilinhab Ilinhac
Figura 5.44: Grafico da Corrente de Saıda a 60Hz de Modulacao do Rede com CaboUmbilical
As formas de onda de corrente de saıda a 60Hz continuam senoidais como espe-
rado. Da mesma forma, pode-se observar as correntes quando a frequencia e 120Hz,
na Figura 5.45.
83

2.95 3 3.05 3.1
Time (s)
0
-100
100
Ilinhaa Ilinhab Ilinhac
Figura 5.45: Grafico da Corrente de Saıda a 120Hz de Modulacao do Rede comCabo Umbilical
Com essas analises e possıvel garantir que a insercao do cabo umbilical, salvo as
devidas simplificacoes, nao causaram grandes problemas as correntes que acionam
o motor em aguas profundas, validando o modelo adotado.
84

Capıtulo 6
Conclusoes
O presente trabalho descreveu a situacao atual das redes offshore nas platafor-
mas de petroleo e apresentou uma solucao para resolver os problemas que ocorrem
na configuracao atual da rede – especialmente devido ao posicionamento do conver-
sor CA-CA utilizado no acionamento dos motores – que e o uso dos Conversores em
Matriz no lugar dos convencionais VSIs. Foram descritos princıpios basicos e as prin-
cipais caracterısticas do Conversor em Matriz, bem como um resumo das tecnicas de
controle e comutacao encontradas em literatura. Dessas diversas tecnicas apresen-
tadas, foi identificado que a Carrier-Based PWM e a mais simples e robusta para
a aplicacao desejada. Finalmente, foram feitas simulacoes no domınio do tempo
no software PSIM© do Conversor aplicado a rede offshore, que comprovaram a
robustez e simplicidade da tecnica escolhida. Como trabalhos futuros, pode-se citar
a montagem em bancada do Conversor em Matriz e obtencao de resultados experi-
mentais e projeta-lo para testes em camaras de altas pressoes, similar ao ambiente
encontrado em aguas profundas.
85

Referencias Bibliograficas
[1] DE OLIVEIRA, A. M., REZENDE, L., DE BARROS, L., etal. “A Methodo-
logy for the Development of a Subsea Electrical Power Transmission and
Distribution System”, Offshore Technology Conference, maio 2013.
[2] BO, O. “Capacitor arranged in a high pressure environment”. mar. 19 2013.
Disponıvel em: <http://www.google.com/patents/US8400756>. US
Patent 8,400,756.
[3] PITTINI, R., HERNES, M., PETTERTEIG, A. “Pressure Tolerant Power Elec-
tronics for Deep and Ultra-Deep Water”, Offshore Technology Conference,
2001.
[4] ESCOBAR-MEJIA, A., LIU, Y., BALDA, J., etal. “New power electronic inter-
face combining DC transmission, a medium-frequency bus and an AC-AC
converter to integrate deep-sea facilities with the AC grid”, Energy Con-
version Congress and Exposition (ECCE), pp. 4335–4344, 2014.
[5] LOPEZ, S., ZANCHETTA, P., WHEELER, P., etal. “Control and implemen-
tation of a matrix-converter-based ac ground power supply unit for air-
craft servicing”, IEEE Transactions on Industrial Electronics, v. 57, n. 6,
pp. 2076—-2084, 2010.
[6] SVENDSEN, H., HADIYA, M., OYSLEBO, E., etal. “Integration of offshore
wind farm with multiple oil and gas platforms”. In: PowerTech, 2011
IEEE Trondheim, pp. 1–3, June 2011. doi: 10.1109/PTC.2011.6019309.
[7] KANG, J., YAMAMOTO, E., IKEDA, M., etal. “Medium-voltage matrix con-
verter design using cascaded single-phase power cell modules”, IEEE
Transactions on Industrial Electronics, v. 58, n. 11, pp. 5007–5013, 2011.
[8] SONG-MANGUELLE, J., DATTA, R., TODOROVIC, M., etal. “A modular
stacked DC transmission and distribution system for long distance subsea
applications”. In: Proceedings of the IEEE Energy Conversion Congress
and Exposition, pp. 4437—-4444, 1977.
86

[9] ZOU, J., QI, W., XU, Y., etal. “Design of Deep Sea Oil-Filled Brushless DC
Motors Considering the High Pressure Effect”, IEEE Transactions on
Magnetics, v. 40, n. 11, pp. 1—-6, 2012.
[10] ULSUND, R. Offshore Power Transmission: Submarine high voltage transmis-
sion alternatives. M.Sc. dissertation, Norwegian University of Science and
Technology, Trondheim, Norway, 2009.
[11] ZHANG, W., CHANG, R. “Equivalent Pi-network model of lossy and dispersive
coupled transmission lines”, Tsinghua Science and Technology, v. 17, n. 1,
pp. 84–93, Feb 2012. doi: 10.1109/TST.2012.6151912.
[12] GRAINGER, J., STEVENSON, W. D. Power System Analysis. 1 ed. New
York, McGraw-Hill, 1994.
[13] ALESINA, A., VENTURINI, M. “Intrinsic amplitude limits and optimum de-
sign of 9-switches direct PWM AC-AC converters”. In: Power Electronics
Specialists Conference, 1988. PESC ’88 Record., 19th Annual IEEE, pp.
1284–1291 vol.2, April 1988. doi: 10.1109/PESC.1988.18273.
[14] ALESINA, A., VENTURINI, M. “Analysis and design of optimum-amplitude
nine-switch direct AC-AC converters”, Power Electronics, IEEE Tran-
sactions on, v. 4, n. 1, pp. 101–112, Jan 1989. ISSN: 0885-8993. doi:
10.1109/63.21879.
[15] YOUGUI, G., JIANLIN, Z., CHENG, D. “Three Modulation Modes of
SVM for AC-AC Matrix Converter”. In: Robotics, Automation and Me-
chatronics, 2008 IEEE Conference on, pp. 382–386, Sept 2008. doi:
10.1109/RAMECH.2008.4681466.
[16] BRADASCHIA, F., ACCIOLY, A., CAVALCANTI, M., etal. “Implementation
of Modulation Strategies for Matrix Converters using a New General Ap-
proach”. In: Industrial Electronics, 2007. ISIE 2007. IEEE International
Symposium on, pp. 701–706, June 2007. doi: 10.1109/ISIE.2007.4374682.
[17] YOON, Y.-D., SUL, S.-K. “Carrier-Based Modulation Technique for Ma-
trix Converter”, Power Electronics, IEEE Transactions on, v. 21, n. 6,
pp. 1691–1703, Nov 2006. ISSN: 0885-8993. doi: 10.1109/TPEL.2006.
882935.
[18] KLUMPNER, C., NIELSEN, P., BOLDEA, I., etal. “New steps towards a low-
cost power electronic building block for matrix converters”. In: Industry
Applications Conference, 2000. Conference Record of the 2000 IEEE, v. 3,
pp. 1964–1971 vol.3, 2000. doi: 10.1109/IAS.2000.882147.
87

[19] LOH, P. C., RONG, R., BLAABJERG, F., etal. “Digital Carrier Modulation
and Sampling Issues of Matrix Converter”, IEEE Transactions On Power
Electronics, v. 24, n. 7, 2009.
[20] WHEELER, P., GRANT, D. “Optimised input filter design and low-loss swit-
ching techniques for a practical matrix converter”, Electric Power Ap-
plications, IEE Proceedings -, v. 144, n. 1, pp. 53–60, Jan 1997. ISSN:
1350-2352. doi: 10.1049/ip-epa:19970863.
[21] CASADEI, D., SERRA, G., TANI, A., etal. “Theoretical and experimental
analysis of SVM controlled matrix converters under unbalanced supply
conditions”, Electromotion Journal, v. 4, n. 1–2, pp. 28–37, 1997.
[22] EMPRINGHAM, L., KOLAR, J., RODRIGUEZ, J., etal. “Technological Issues
and Industrial Application of Matrix Converters: A Review”, Industrial
Electronics, IEEE Transactions on, v. 60, n. 10, pp. 4260–4271, Oct 2013.
ISSN: 0278-0046. doi: 10.1109/TIE.2012.2216231.
[23] NEFT, C. “AC power supplied static switching apparatus having energy re-
covery capability”. set. 29 1987. Disponıvel em: <http://www.google.
com.ar/patents/US4697230>. US Patent 4,697,230.
[24] BOSE, B. “Power electronics-a technology review”, Proceedings of the IEEE,
v. 80, n. 8, pp. 1303–1334, Aug 1992. ISSN: 0018-9219. doi: 10.1109/5.
158603.
[25] MUNZER, M. “EconoMAC the first all-in-one IGBT module for Matrix Con-
verters”, Proc. Drivers and Control Conf.in London, v. 3, 2011.
[26] ANDREU, J., KORTABARRIA, I., ORMAETXEA, E., etal. “A Step Forward
Towards the Development of Reliable Matrix Converters”, IEEE Tran-
sactions on Industrial Electronics, v. 59, n. 1, pp. 167–183, 2012.
[27] RODRIGUEZ, J., RIVERA, M., KOLAR, J. W., etal. “A Review of Control
and Modulation Methods for Matrix Converter”, IEEE Transactions on
Industrial Electronics, v. 59, n. 1, pp. 58–70, 2012.
[28] R., B., W., B., A, R. “An Approach to the Realisation of a High Power Venturini
Converter”, IEEE, pp. 291–297, 1990.
[29] WHEELER, P., ZHANG, H., GRANT, D. “A theoretical and practical conside-
ration of optimised input filter design for a low loss matrix converter”. In:
Power Electronics and Variable-Speed Drives, 1994. Fifth International
Conference on, pp. 363–367, Oct 1994. doi: 10.1049/cp:19940992.
88

[30] BURANY, N. “Safe control of four-quadrant switches”. In: Industry Applicati-
ons Society Annual Meeting, 1989., Conference Record of the 1989 IEEE,
pp. 1190–1194 vol.1, Oct 1989. doi: 10.1109/IAS.1989.96794.
[31] LEE, D.-C., LEE, G.-M. “Linear control of inverter output voltage in over-
modulation”, Industrial Electronics, IEEE Transactions on, v. 44, n. 4,
pp. 590–592, Aug 1997. ISSN: 0278-0046. doi: 10.1109/41.605640.
[32] ALESINA, A., VENTURINI, M. “Solid-state power conversion: A Fourier
analysis approach to generalized transformer synthesis”, Circuits and Sys-
tems, IEEE Transactions on, v. 28, n. 4, pp. 319–330, Apr 1981. ISSN:
0098-4094. doi: 10.1109/TCS.1981.1084993.
[33] VENTURINI, M. “A new sine wave in sine wave out, conversion technique
which eliminates reactive elements”, Proceeding Powercon, v. E3, n. 7,
pp. 1, 1990.
[34] ROY, G., APRIL, G.-E. “Cycloconverter operation under a new scalar control
algorithm”. In: Power Electronics Specialists Conference, 1989. PESC ’89
Record., 20th Annual IEEE, pp. 368–375 vol.1, Jun 1989. doi: 10.1109/
PESC.1989.48511.
[35] CASADEI, D., GRANDI, G., SERRA, G., etal. “Space vector control of matrix
converters with unity input power factor and sinusoidal input/output wa-
veforms”. In: Power Electronics and Applications, 1993., Fifth European
Conference on, pp. 170–175 vol.7, Sep 1993.
[36] RODRIGUEZ, J., RIVERA, M., KOLAR, J. W., etal. “Direct Torque Control
of Induction Machines Using Space Vector Modulation”, IEEE Transac-
tions on Industrial Applications, v. 28, n. 5, pp. 1045–1053, 1992.
[37] SALEH, M., IQBAL, A., AHMED, S., etal. “Carrier based PWM technique for
a three-to-six phase matrix converter for supplying six-phase two-motor
drives”. In: IECON 2011 - 37th Annual Conference on IEEE Industrial
Electronics Society, pp. 3470–3475, Nov 2011. doi: 10.1109/IECON.2011.
6119870.
[38] MOHAN, N., MOHAPATRA, K., THUTA, S., etal. “Carrier-based pulse-width
modulation (PWM) control for matrix converters”. jan. 11 2011. Dis-
ponıvel em: <http://www.google.com/patents/US7869236>. US Pa-
tent 7,869,236.
89

[39] LIMONGI, L., BOJOI, R., PICA, C., etal. “Analysis and Comparison of Phase
Locked Loop Techniques for Grid Utility Applications”. In: Power Con-
version Conference - Nagoya, 2007. PCC ’07, pp. 674–681, April 2007.
doi: 10.1109/PCCON.2007.373038.
[40] ROJAS, C., PEREZ, M., WILSON, A., etal. “Reactive power control using a
carrier-based modulation for Cascaded Matrix Converter”. In: Industrial
Electronics Society, IECON 2013 - 39th Annual Conference of the IEEE,
pp. 4913–4918, Nov 2013. doi: 10.1109/IECON.2013.6699930.
[41] YAMAMOTO, E., HARA, H., UCHINO, T., etal. “Development of MCs and
its Applications in Industry [Industry Forum]”, Industrial Electronics Ma-
gazine, IEEE, v. 5, n. 1, pp. 4–12, March 2011. ISSN: 1932-4529. doi:
10.1109/MIE.2011.940249.
90

Apendice A
Conversor em Matriz em Cascata
A tıtulo de documentacao e possıveis trabalhos futuros, sera apresentada aqui
a topologia de Conversor em Matriz em Cascata. Como o motor a ser acionado
na plataforma tem potencia nominal que varia de 1 a 1,5 MW e sera conectado a
uma rede de distribuicao de 13,8kV, e desejavel que a topologia do Conversor seja
adequada para utilizacao em grandes potencias. Considerando esses dados, apos
a analise dos resultados de trabalhos ja publicados [40], pode-se concluir que uma
topologia adequada a essa aplicacao e o Conversor em Matriz em Cascata (Cascaded
Matrix Converter), ilustrado na Figura A.1, pois ele suporta operar em maiores
potencias e altas tensoes de entrada, acima de 6kV [41]. Essa caracterıstica se deve
ao fato de que ainda nao existem semicondutores que suportem a aplicacao direta de
nıveis de tensao e potencia tao altos; portanto, a estrategia de estruturar o Conversor
em conexoes modulares e em cascata torna possıvel o uso de semicondutores de baixa
tensao em ambientes de alta tensao.
91

Figura A.1: Circuito de potencia do Conversor em Matriz em Cascata
No entanto, antes de projetar o controle referente ao Conversor em Matriz em
Cascata e preciso desenvolver cada uma de suas celulas que sao, individualmente,
Conversores em Matriz Trifasico para Monofasico (Figura A.2), que sao alimentados
por uma rede trifasica e acionam uma carga monofasica. As simulacoes e analises
de ambas as topologias serao apresentadas na Secao ??.
Figura A.2: Circuito de Potencia do Conversor em Matriz Trifasico para Monofasico
O controle dessa topologia e o mesmo que o trifasico para trifasico, com a di-
ferenca que sao moduladas apenas duas fases. A corrente de saıda na carga esta
apresentada na Figura A.3, sendo ela senoidal e sem ruıdos, como esperado.
92

0 0.1 0.2 0.3 0.4 0.5
Time (s)
0
-10
-20
-30
10
20
30
IA
Figura A.3: Grafico da Corrente de Saıda do Conversor em Matriz Trifasico paraMonofasico
Feita a modulacao da celula, pode-se partir para a analise do Conversor em
Matriz em Cascata. Como ja mencionado, a principal vantagem desta topologia e
a possibilidade de operar com altas potencias de entrada. Por isso as tres fontes
trifasicas da entrada – Figura A.4 – possuem angulos de inıcio iguais a −20o, 0o e
20o e representam um transformador de enrolamentos multiplos. O controle desse
Conversor e feito repetindo-se o controle do Trifasico para Monofasico para cada
uma das tres celulas. A diferenca e que tres ondas triangulares sao utilizadas para
acionar fazer a modulacao de cada celula e estas sao defasadas de 210o.
93

Figura A.4: Circuito de Potencia do Conversor em Matriz em Cascata
As correntes de saıda no motor acionado estao descritas na Figura A.5.
0 0.5 1 1.5 2 2.5 3
Time (s)
0
-100
-200
-300
100
200
300
IA IB IC
Figura A.5: Grafico das Correntes de Saıda no Conversor em Matriz em Cascata
Para comprovar a eficacia do uso dessa topologia no acionamento do motor, a
Figura A.6 mostra que a velocidade do motor alcanca 1800rpm, em regime perma-
nente, como esperado.
94

0 0.5 1 1.5 2 2.5 3
Time (s)
0
500
1000
1500
2000
Veloc
Figura A.6: Grafico do Velocidade no Motor Acionado pelo Conversor em Matrizem Cascata
Como este trabalho nao teve objetivo de realizar testes reais com os motores das
plataforma, as analises mais detalhadas foram restritas a topologia convencional
Trifasico para Trifasico para validacao do modelo e controle adotados.
95
Recommended