一般相対論におけるN体問題— 相対論と舞踏解 —
浅田 秀樹(弘前大 理工)
共同研究者:今井 辰徳,千葉 貴将2007年5月28日
研究会「宇宙初期における時空と物質の進化」 (東京大学)1

一般相対論的な強い重力場中でのN体・・・あまり研究されていない
・宇宙における非線型ゆらぎ・巨大ブラックホール形成
などとも関連するかもしれない ....2

◎ 日本天文学会における格言(出典:伊藤,谷川,「33回天体力学N体力学研究会集録」)
「三体問題にだけは手を出すな」(古在由秀)
「相対論にだけは手を出すな」(海野和三郎)
3

というが・・・
一般相対論の視点で,「3体問題」を再考した.
4

References:
Chiba, Imai, HA,
MNRAS. 377, 269 (2007)
Imai, Chiba, HA,
Phys. Rev. Lett. 98, 201102 (2007)
5
重力波・・・一般相対論における時空の歪みの伝播
加速度運動する天体例:ハルス・テーラーの連星パルサー(1974年発見,1993年ノーベル賞)
6

周期的な重力波源として期待される天体
N=1・・・高速自転する回転星 (歪んだパルサー等)
N=2・・・コンパクト連星
7

3体以上は,余り考察されていない.
N=3以上は,カオスがあるから.
不規則な重力波は,検出が難しい...8

疑問:
3体以上からは周期的な重力波は出ないのか?
9

答え:
3体以上も周期的な重力波を生成する事は可能
Chiba, Imai, HA,
MNRAS. 377, 269 (2007)10

一例・・・
3体の「8の字解」
Moore (1993)
Chenciner and Montgomery (2000)
11
仮定 ・・・ ニュートン重力
mid2~ri
dt2= −mimj(~ri − ~rj)
|~ri − ~rj|3− mimk(~ri − ~rk)
|~ri − ~rk|3
12
3質点に対する仮定
同一平面上
同一質量
13

2
31
V/ 2
V
V/ 2
-1
-0.5
0
0.5
1
-1 -0.5 0 0.5 1
Y
X
t = 0
14

-1
-0.5
0
0.5
1
-1 -0.5 0 0.5 1
Y
X
2
31
t = T / 2
15

重力波・・・四重極公式 (波動帯)
hTTij =
2GQ̈ij
rc4+ O
1
r2
ただし,
Qij = Iij − δijIkk
3
Iij =N∑
A=1mAxi
AxjA
16

hxx
, hxy
t / T-4-3-2-1 0 1 2 3 4
c r
G m2
]
]
0 0.2 0.4 0.6 0.8 1
17

エネルギー減少率dE
dt=
G
5c5< Q
(3)ij Q
(3)ij >
= 1.2× 1019
m
M¯
5 R¯`
5erg/s
18

重力波放出の反作用のタイムスケール
tGW ≡ E
dE/dt
= 0.13
M¯m
3
`
R¯
4
Gyr
19
全角運動量は損失しない.例1正面衝突するブラック・ホール (Smarr 1979)
各天体の軌道角運動量=0例28の字解では,各々の軌道角運動量 6= 0.トータルでゼロ.
20
疑問:
ニュートンの運動方程式で OK ?
21

答え:
一般相対論的効果が必要・・・
1次の補正 = ポスト・ニュートン(フルでは反作用があるので,「断熱的」・・・「準周期解」)
22
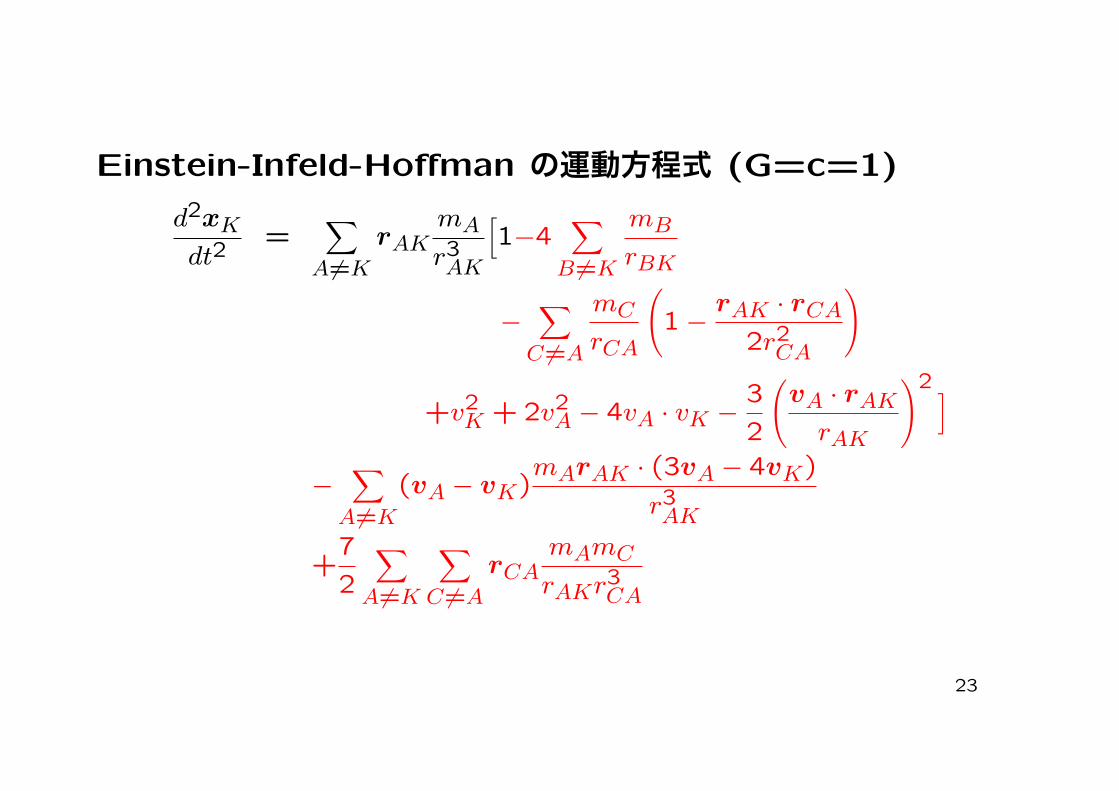
Einstein-Infeld-Hoffman の運動方程式 (G=c=1)
d2xK
dt2=
∑
A6=K
rAKmA
r3AK
[1−4
∑
B 6=K
mB
rBK
−∑
C 6=A
mC
rCA
(1− rAK · rCA
2r2CA
)
+v2K + 2v2
A − 4vA · vK − 3
2
(vA · rAK
rAK
)2 ]
−∑
A6=K
(vA − vK)mArAK · (3vA − 4vK)
r3AK
+7
2
∑
A6=K
∑
C 6=A
rCAmAmC
rAKr3CA
23

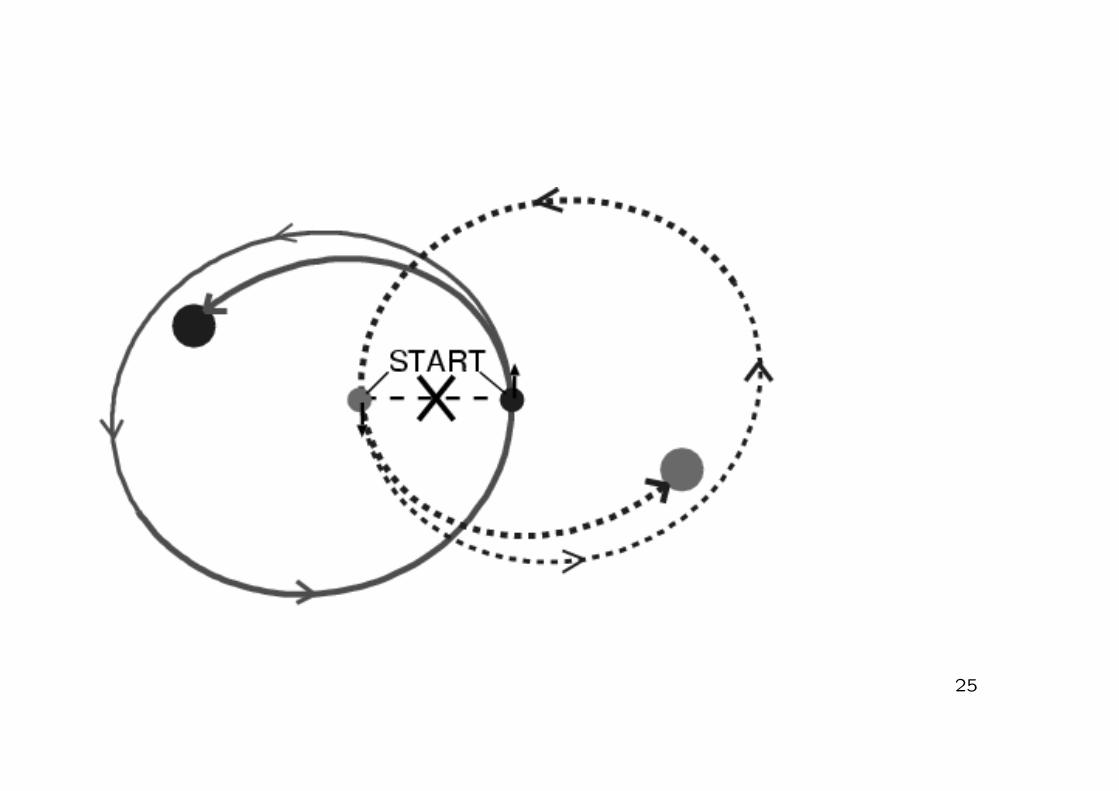
疑問:
2体だと近日点移動のため,軌道が閉じない
8の字は OK ?
24
25

26

初速度をパラメタ化~v1 = k~V + ξ
m
`3(~V · ~̀)~̀
~v2 = k~V + ξm
`3(~V · ~̀)~̀
~v3 = ~V
k = −1
2+ α|~V |2 + β
m
`27
~Ptot = ~Ltot = 0 より
α = − 3
16
β = ξ =1
828

残る2自由度
~V = (Vx, Vy) は,数値計算
29
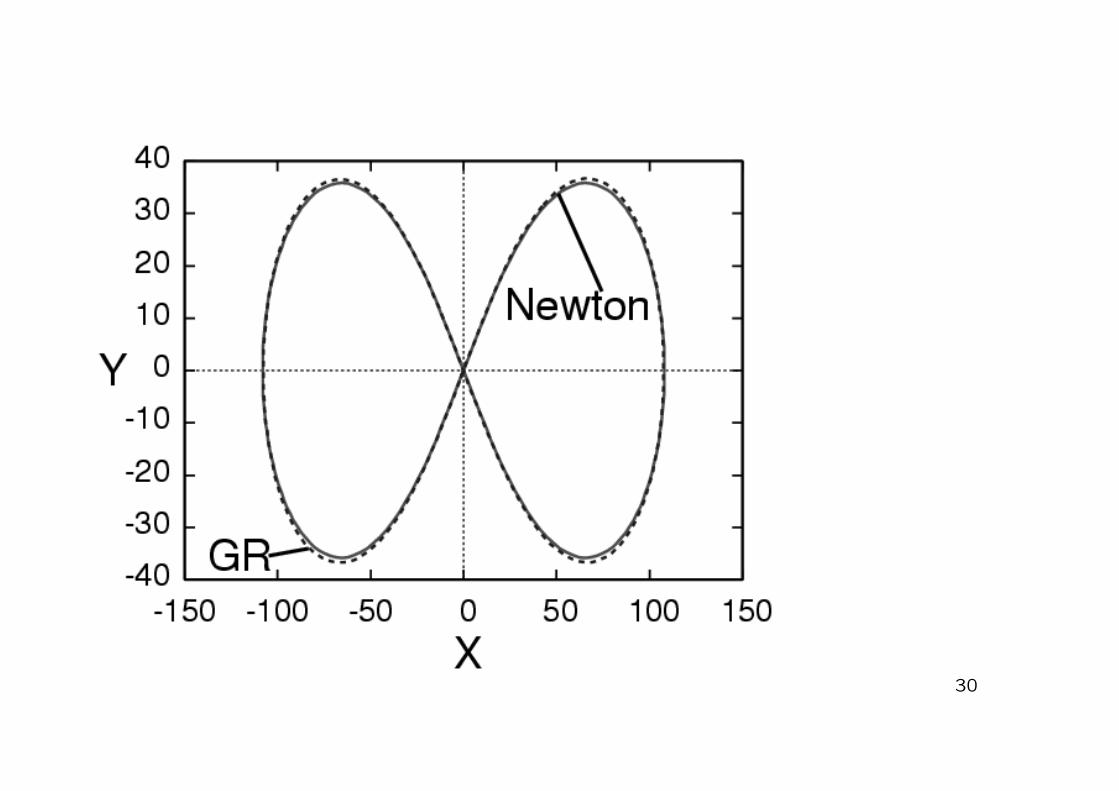
30

まとめ
○ N体でも周期的重力波を作る事は可能○ ポスト・ニュートン重力での「8の字解」○ 一般相対論的N体問題にも「舞踏解」
8の字解からの重力波のイベントは極めて稀( < 1/Gyr)
31

References:
Chiba, Imai, HA,
MNRAS. 377, 269 (2007)
Imai, Chiba, HA,
Phys. Rev. Lett. 98, 201102 (2007)
32

ご静聴,感謝いたします.
33

L =1
2
∑
AmAv2
A +1
2
∑
A
∑
B 6=A
mAmB
rAB+
1
8
∑
AmAv4
A
−1
4
∑
A
∑
B 6=A
mAmB
rAB[7(vA · vB)− 6v2
A + (vA · nAB)(vB · nAB)]
−1
2
∑
A
∑
B 6=A
∑
C 6=A
mAmBmC
rABrAC(1)
34

Here we define
~rAB ≡ ~rA − ~rB
rAB ≡ |~rAB|~nAB ≡ ~rAB
rAB
35

36
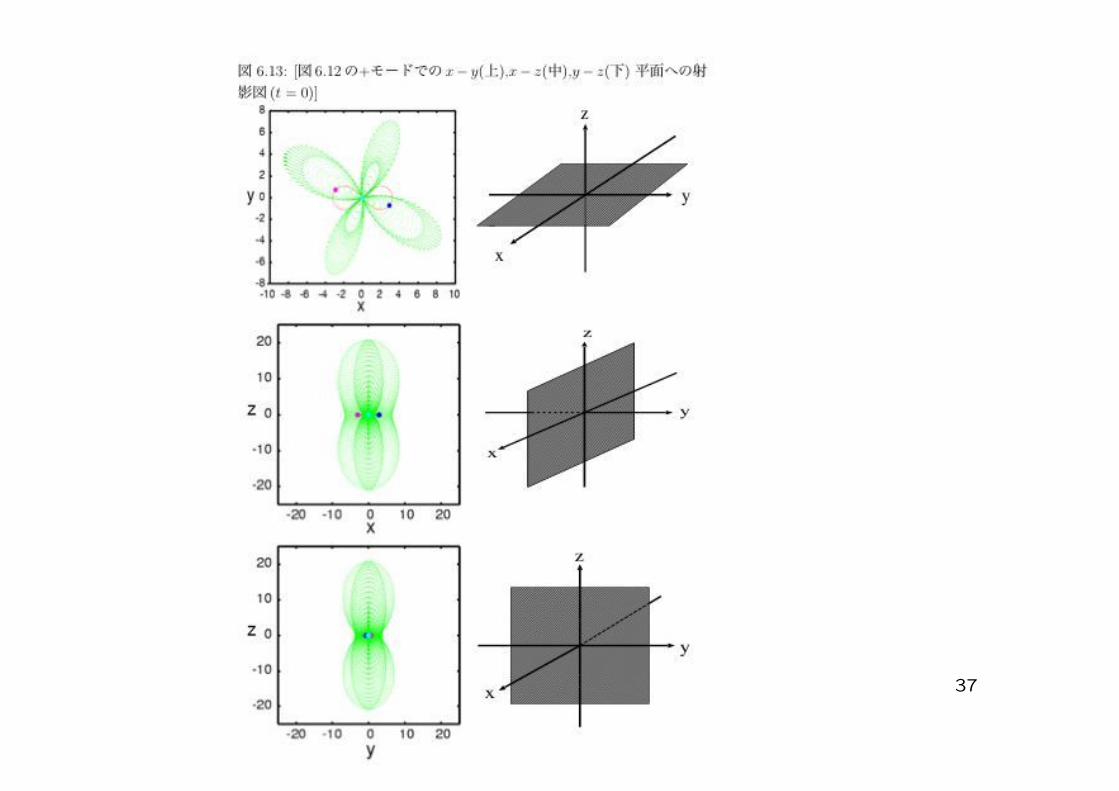
37

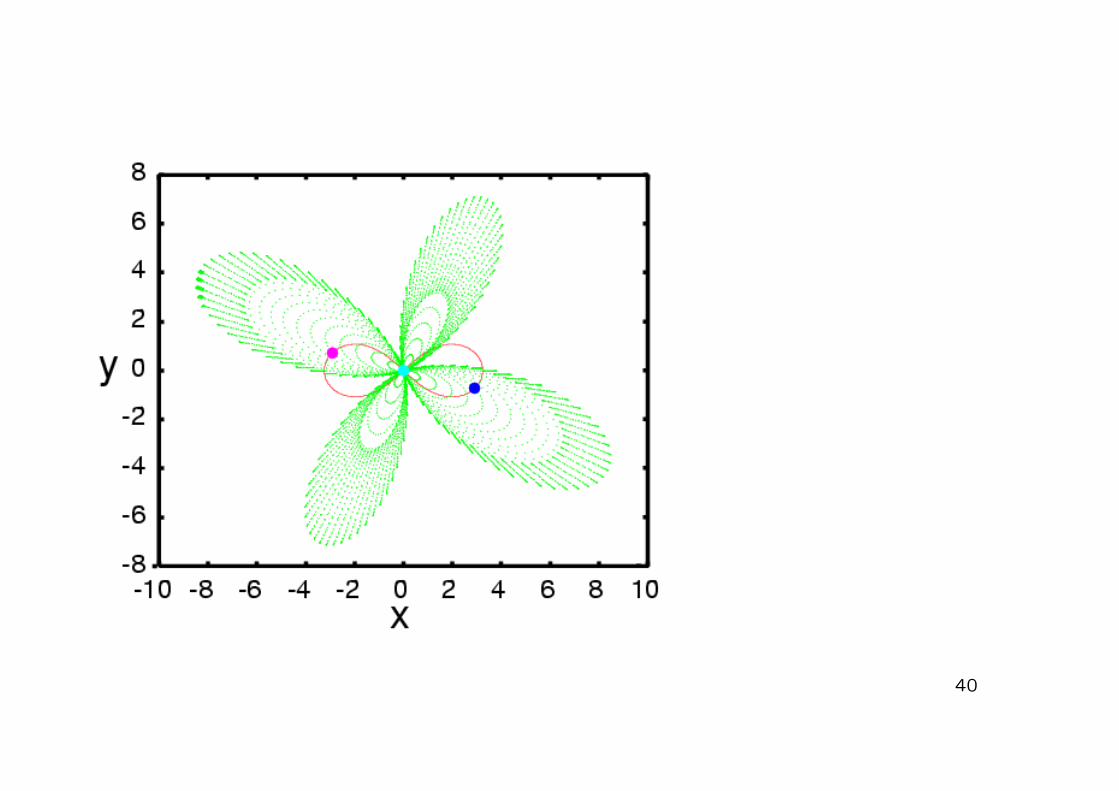
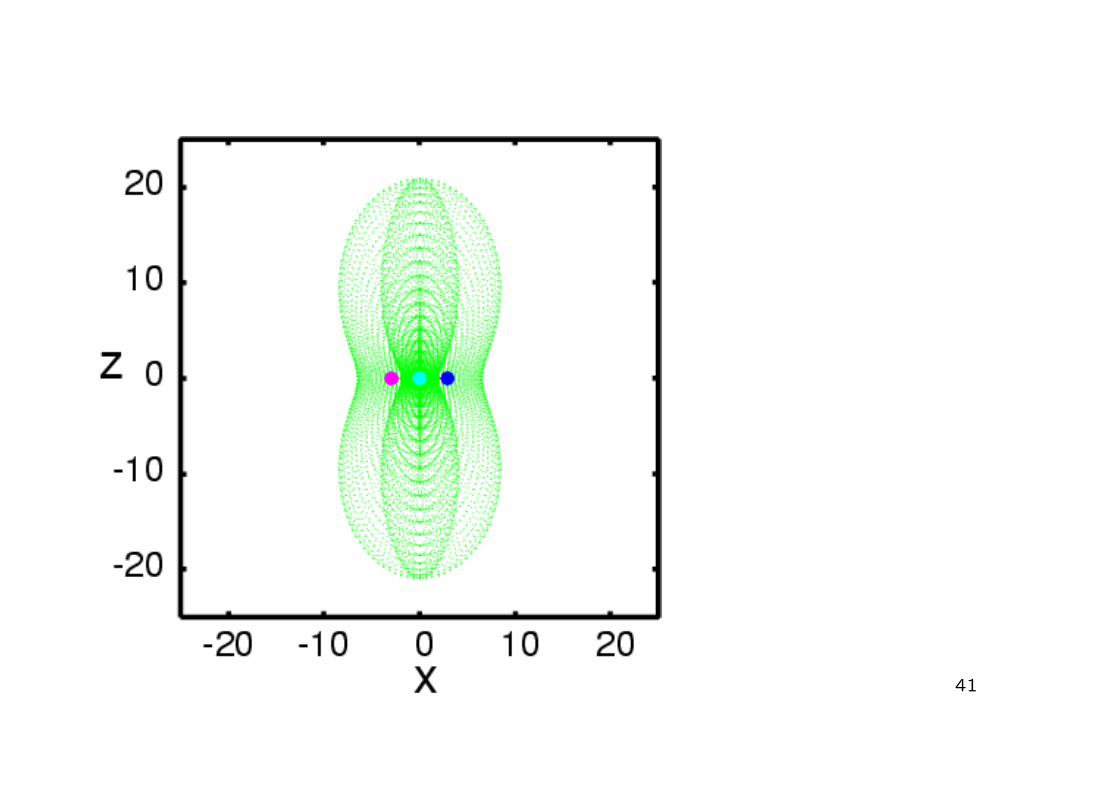
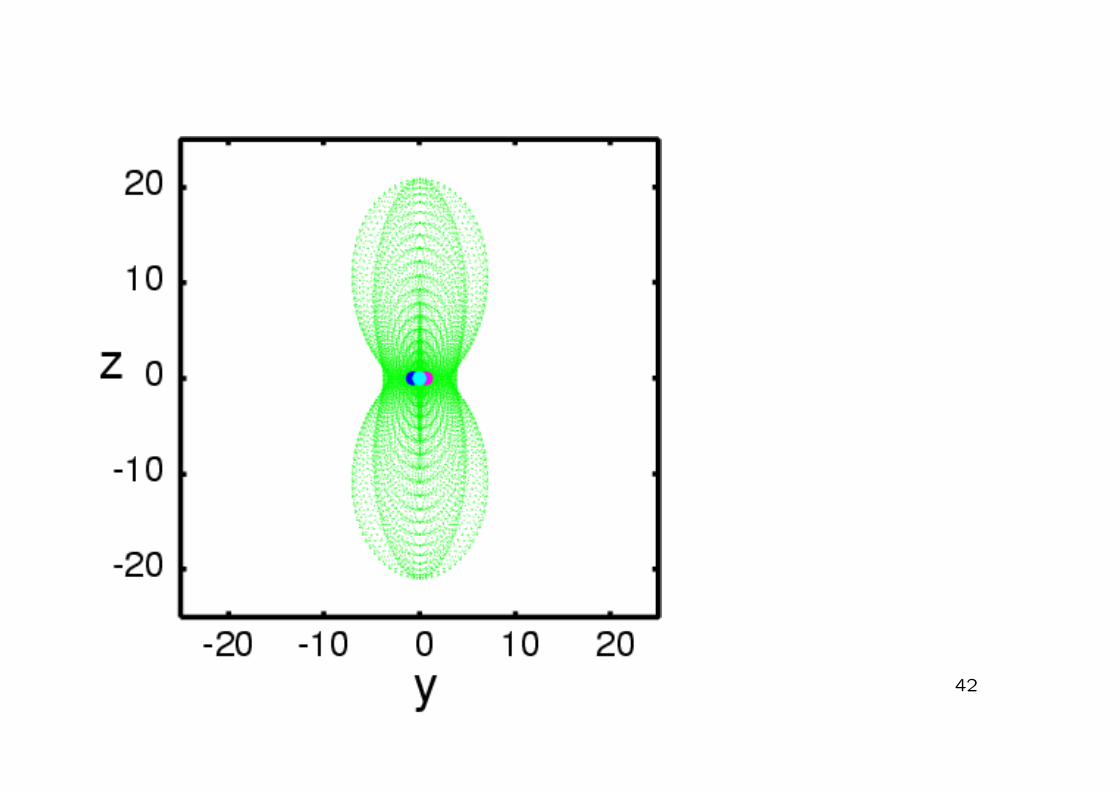
[A-1]
+モードの角度依存性 (t = 0)
38

39
40
41
42

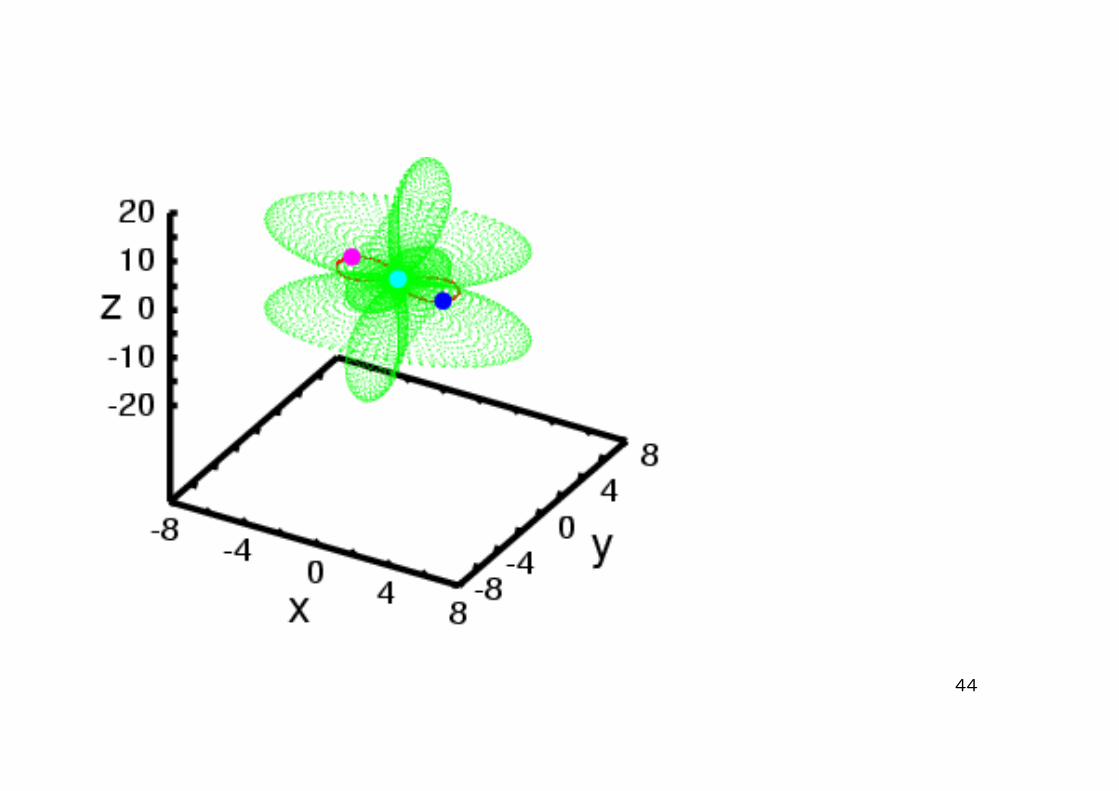
[A-2]
×モードの角度依存性 (t = 0)
43
44

45

46

47
Recommended



![· Web view2 索 引 2 第1章 特殊相対性理論の運動学 2 [訳注1]増補第3版の主な増補部分一覧 2 第3章 相対性理論の実験的基礎 2 第4章 特殊相対性理論の動力学](https://img.pdfslide.tips/doc/110x75/5e532b4ebaa9d70f5b50484f/web-view-2-c-2-c1c-cccee-2-e1eoec3ceoeefe.jpg)













