ECOLE DES MINES DOUAI
_______________
EL MARHOUNE (Jamal)
SAGOU NOUBISSI (Roland)
ETUDE BIBLIOGRAPHIQUE
Promotion 2012 Année Scolaire 2011 - 2012
Mesure des champs de déformation par la technique d e
corrélation d’images numériques
(Deformation field measurement by Digital Image Cor relation
technique)

2
3
TABLE DES MATIERES
Table des matières .................................................................................................................................. 3
Résumé .................................................................................................................................................... 5
Abstract ................................................................................................................................................... 7
Introduction ............................................................................................................................................. 9
Etat de l’art ............................................................................................................................................ 11
1. Principes .................................................................................................................................... 11
1.1 Notion de déformation d’un solide ................................................................................... 11
1.2 La corrélation d’images numériques ................................................................................ 11
1.3 Algorithme de calcul de corrélation d'images numériques .............................................. 13
2. Procédures expérimentales ....................................................................................................... 15
2.1 La préparation de la surface (éprouvette) ........................................................................ 15
2.2 Le calibrage des caméras ................................................................................................... 15
2.3 L’acquisition des images numériques ............................................................................... 16
2.4 Protocole expérimental de corrélation d’image ............................................................... 17
3. Domaines d’application ............................................................................................................. 19
3.1 Caractérisation des matériaux........................................................................................... 19
3.2 Numérisation 3D et emboutissage .................................................................................... 19
3.3 Haute vitesse : Pyrotechnique et crash-tests .................................................................... 19
La technologie ....................................................................................................................................... 21
4. Matériels.................................................................................................................................... 21
4.1 Caméras ............................................................................................................................. 22
4.2 Objectifs ............................................................................................................................. 23
4.3 Supports stéréoscopiques de caméras .............................................................................. 23
4.4 Mires d’étalonnage............................................................................................................ 24
4.5 Dispositifs d’éclairage ........................................................................................................ 26
5. Logiciels ..................................................................................................................................... 27
5.1 VIC-3D ................................................................................................................................ 27
5.2 ARAMIS .............................................................................................................................. 27
5.3 ASAME ............................................................................................................................... 28
5.4 ICASOF ............................................................................................................................... 28
6. Fournisseurs et produits ............................................................................................................ 29
6.1 Correlated Solutions Inc .................................................................................................... 29
6.2 Gom mbH .......................................................................................................................... 30
4
6.3 LaVision.............................................................................................................................. 31
6.4 Dantec dynamics ............................................................................................................... 31
6.5 Limess Messtechnik and Software GmbH ......................................................................... 32
Etat des lieux ......................................................................................................................................... 33
7. Les laboratoires de références en France ................................................................................. 33
7.1 Laboratoire de Mécanique et Technologie - UMR 8535 - de l’ENS Cachan ...................... 33
7.2 Laboratoire de Mécanique des Solides - UMR 7649 - Polytechnique (ParisTech) ............ 35
7.3 Laboratoire de Mécanique des Solides - UMR 6610 – Université de Poitiers ................... 36
8. Quelques résultats de R&D ....................................................................................................... 37
8.1 Mesure des champs de déplacements sur un fer à repasser en cours de cycle de
chauffage ....................................................................................................................................... 37
8.2 Etude du champ de déformations d’une coque cylindrique emboutie ............................ 44
Conclusion ............................................................................................................................................. 55
Références bibliographiques ................................................................................................................. 57
5
RESUME
____________________
La corrélation d'images numériques est une méthode optique pour mesurer
les déformations en surface d'objet. Cette technique a l’avantage d’être non intrusive
(sans contact) et d’offrir une meilleure résolution spatiale (2D ou 3D). La méthode
consiste à : acquérir au moins deux images d’une même surface par une caméra, à
au moins deux états de sollicitation différents (état initial et état finale) ; associer des
points homologues des images en se basant sur la ressemblance de leur voisinage
(appariement temporel) ; déduire enfin le champ de déplacement des points dans les
images (disparités), puis par dérivation discrète, le champ de déformation de la
surface. Ces derniers traitements d’images sont effectués numériquement suivant un
algorithme de calcul programmé. En fonction du matériau, la surface à observer peut
être traitée pour assurer une texture d’images propice. Les équipements nécessaires
pour la mise en œuvre de la technique sont donc essentiellement un matériel
d’acquisition (caméras, objectifs, etc.) et un logiciel de traitement d’image.
Développée aux USA dès les années 80, cette technologie est bien maitrisée en
France via quelques laboratoires universitaires dont le LMT de l’ENS Cachan
notamment. Bien que relativement récente, la mesure par corrélation d’images déjà
très sollicitée, est utilisée dans des applications telles : la caractérisation des
matériaux, la numérisation 3D et l’emboutissage, la Pyrotechnique et les crash-tests,
etc. C’est une technologie prometteuse pour la caractérisation de nouveaux
matériaux et le développement industriel en général. Elle est aussi viable que fiable à
condition de respecter les protocoles expérimentaux définis (ou à définir), plusieurs
travaux de recherche l’ont démontré.
Mots matières
- Mesure - Champ
- Déformation - Corrélation
- Image - Numérique

6
7
ABSTRACT
__________________
The digital correlation is an optical method to measure surface deformation of
object. This technique has the advantage of not being intrusive (without contact) and
offers a better spatial resolution (2D or 3D). The method consists of: acquiring at
least two images of the same surface with a camera, at least two different states of
stress (initial and final state) associating corresponding points with images based on
the similarity of their neighborhood (match time) to finally deduce the displacement
fields of the points in the images (disparity) and, then by discrete derivation, the field
of surface deformation. These image processing is performed digitally following an
algorithm programmed. Depending on the material, the surface observed can be
treated to ensure a suitable image texture. The equipment required for the
implementation of the technique is essentially an acquisition hardware (cameras,
lenses, etc..) and an image processing Software. Developed in the United States in
the 80's, this technology is well controlled in France through a few academic
laboratories like the LMT of the ENS of Cachan especially. Although relatively new,
the measurement by image correlation already stretched, is used in applications such
as materials characterization, 3D scanning and stamping, high speed (Fireworks and
crash tests) etc.. It is a promising technology for the characterization of new materials
and industrial development in general. It is as sustainable as reliable provided you
follow the experimental protocols defined (or define), several research have shown
this.
KEYWORDS
- Measurement - Field
- Deformation - Correlation
- Image - Digital
- Strain

8
9
INTRODUCTION
Dans le cadre du développement de ses activités de recherche, le
Département Technologie des Polymères et Composites & Ingénierie Mécanique
(TPCIM) de l’Ecole des Mines de Douai (EMD) souhaite acquérir une nouvelle
technique pour l’étude du comportement des matériaux : la mesure des champs de
déformation en 3D par la technique de corrélation d’images numériques. Initialement,
la nécessité de déterminer des lois de comportement pour tous les types de
matériaux a conduit à la mise au point d’un certain nombre de techniques de
détermination de l’état de déformation et/ou de contrainte du matériau.
Un premier outil expérimental est l’extensométrie mécanique qui permet la
détermination des déformations à la surface d’un solide le plus souvent à partir
d’extensomètres et de jauges. Ces outils sont performants. Ils offrent une simplicité
de mise en œuvre, des mesures en temps réel, une bonne résolution ainsi qu’une
bonne précision. Cependant, ils fournissent le plus souvent des mesures ponctuelles,
unidirectionnelles et la qualité de la mesure est fortement tributaire de la liaison du
capteur avec l’objet étudié. Ces dernières années ont connu le développement de
nouvelles techniques optiques qui se sont rapidement imposées en raison de leur
caractère non intrusif, de leur grande résolution spatiale, de leur sensibilité élevée,
de l’importance du champ examiné à tout instant et des progrès de l’informatique qui
permet le traitement automatique d’un grand volume d’information.
La mesure des champs de déformation par corrélation d’images numériques
est une technique relativement récente. Cette technique nécessite l’utilisation d’un
équipement spécial et des connaissances appropriées. C’est pourquoi il serait
judicieux de s’informer avant sur la technologie mise en œuvre et le retour
d'expériences des utilisateurs de la technique. Dans ce sens, notre étude comporte
trois parties. La première partie traite de l’état de l’art, c’est-à-dire des principes, des
procédures expérimentales et des applications de la technique. Ensuite, nous
décrirons dans la partie technologie le principal matériel et les logiciels utilisés et les
fournisseurs potentiels. Nous finirons par l’état des lieux où sont présentés quelques
laboratoires qui développent les techniques de mesure par corrélation d’images,
résultats de R&D ainsi que des rendez-vous de références pour échanges sur cette
technologie.

10
11
ETAT DE L ’ART
1. PRINCIPES
1.1 Notion de déformation d’un solide
Sous l’action d’efforts extérieurs, un solide est susceptible de se déplacer. Si
ces efforts entraînent l’apparition de contraintes internes dans le solide, il est
possible qu’il se déforme. La déformation d’un solide est caractérisée par le
déplacement relatif de ses particules : lorsqu’il y a déformation, les distances entre
deux points et/ou les angles des tangentes à deux courbes en un point ne se
conservent pas. L’état de déformation local résultant de contraintes peut être décrit
par un tenseur des déformations défini en tout point du solide. On parle de ce fait de
champ de déformation.
La technique de corrélation d'images ne permet pas de mesurer directement
les déformations. Elles sont estimées par post-traitement à partir des déplacements.
Les méthodes de corrélation d'images reposent sur l'utilisation de fonction
de corrélation croisée.
1.2 La corrélation d’images numériques
La corrélation d'images (Digital Image Correlation : DIC en anglais) est une
méthode optique qui permet de mesurer les déplacements entre deux images. Le
développement rapide des appareils photos et des caméras CCD donne accès à une
grande quantité d'informations. Chaque pixel du capteur apporte une information
codée sur un nombre de bits définis par la sensibilité du capteur (typiquement 8, 12,
14 et 16 bits). Cette information correspond au flux lumineux reçu sur ce pixel. Par
exemple, l'information sur un pixel d'un capteur 8 bits prendra une valeur comprise
entre 0 (pas de flux) et 255 (flux maximum). Chaque image brute est stockée sous la
forme d'une matrice 2D dont chaque case a une valeur que l'on appelle niveau de
gris. Une image est donc une fonction discrète de deux variables à valeurs dans
l'espace des niveaux de gris défini par la sensibilité du capteur.
12
La fonction de corrélation croisée (aussi appelée fonction de corrélation par
abus de langage) est un opérateur qui agit sur deux fonctions (f(x,y) , g(x,y)),
correspondant chacune à une image. Les algorithmes de corrélation utilisent les
images sous forme de matrices de niveaux de gris comme donnée d'entrée. Cet
opérateur a la propriété de valoir 1 lorsque les deux fonctions sont identiques et de
tendre vers -1 quand les fonctions sont différentes. Pour mesurer le déplacement
relatif de deux images selon les axes x et y de l'image, un algorithme de corrélation
recherche les valeurs des déplacements dx et de dy telles que g(x+dx,y+dy)
maximise l'opérateur de corrélation avec f. Ces valeurs sont retenues comme les
meilleures estimations des déplacements de l'image g par rapport à l'image f.
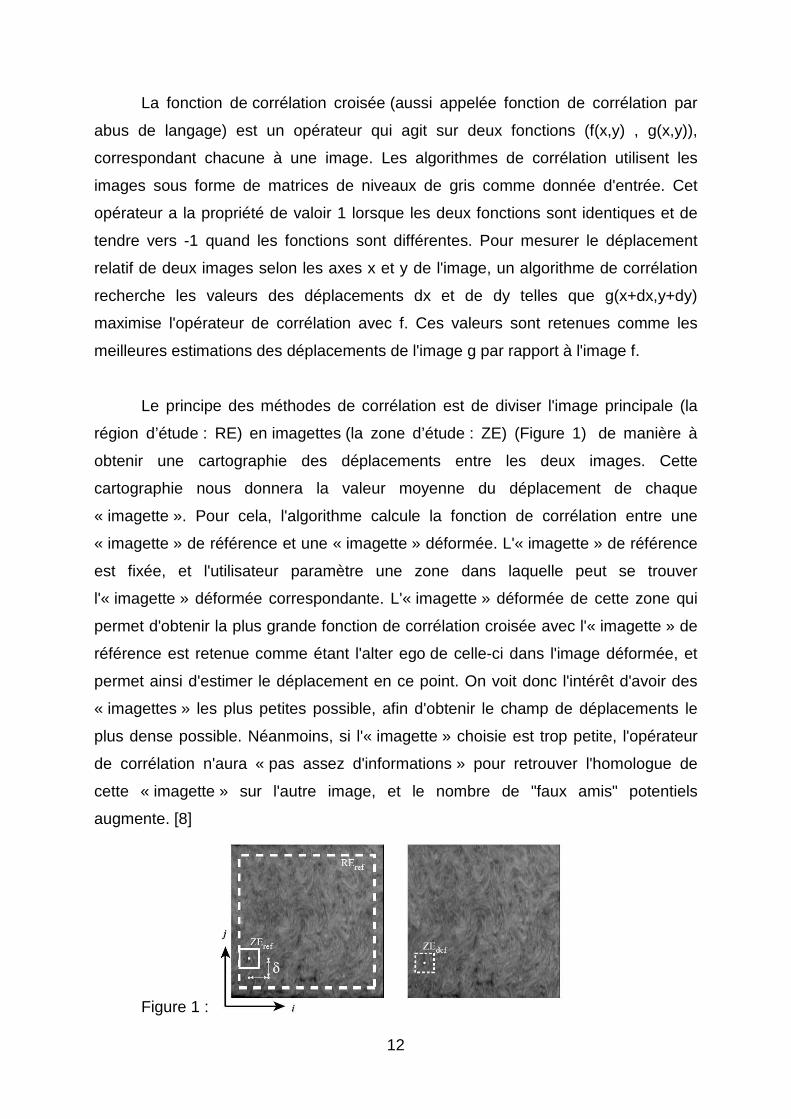
Le principe des méthodes de corrélation est de diviser l'image principale (la
région d’étude : RE) en imagettes (la zone d’étude : ZE) (Figure 1) de manière à
obtenir une cartographie des déplacements entre les deux images. Cette
cartographie nous donnera la valeur moyenne du déplacement de chaque
« imagette ». Pour cela, l'algorithme calcule la fonction de corrélation entre une
« imagette » de référence et une « imagette » déformée. L'« imagette » de référence
est fixée, et l'utilisateur paramètre une zone dans laquelle peut se trouver
l'« imagette » déformée correspondante. L'« imagette » déformée de cette zone qui
permet d'obtenir la plus grande fonction de corrélation croisée avec l'« imagette » de
référence est retenue comme étant l'alter ego de celle-ci dans l'image déformée, et
permet ainsi d'estimer le déplacement en ce point. On voit donc l'intérêt d'avoir des
« imagettes » les plus petites possible, afin d'obtenir le champ de déplacements le
plus dense possible. Néanmoins, si l'« imagette » choisie est trop petite, l'opérateur
de corrélation n'aura « pas assez d'informations » pour retrouver l'homologue de
cette « imagette » sur l'autre image, et le nombre de "faux amis" potentiels
augmente. [8]
Figure 1 :
13
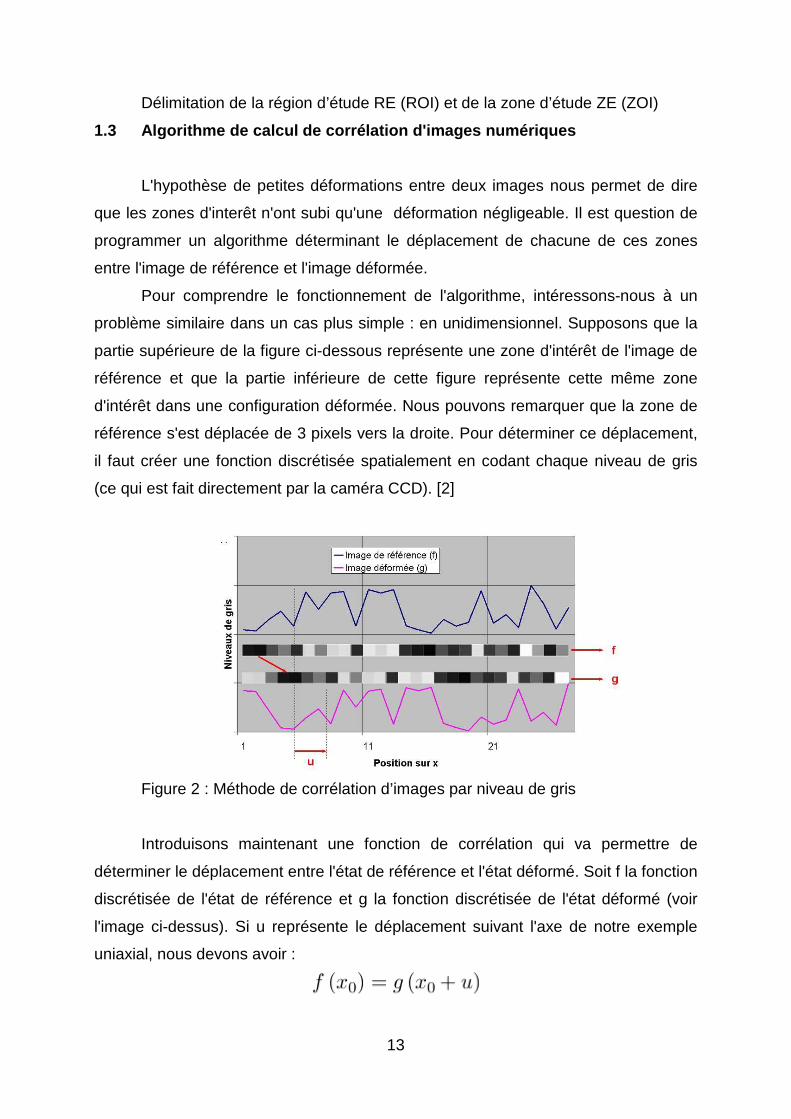
Délimitation de la région d’étude RE (ROI) et de la zone d’étude ZE (ZOI)
1.3 Algorithme de calcul de corrélation d'images n umériques
L'hypothèse de petites déformations entre deux images nous permet de dire
que les zones d'interêt n'ont subi qu'une déformation négligeable. Il est question de
programmer un algorithme déterminant le déplacement de chacune de ces zones
entre l'image de référence et l'image déformée.
Pour comprendre le fonctionnement de l'algorithme, intéressons-nous à un
problème similaire dans un cas plus simple : en unidimensionnel. Supposons que la
partie supérieure de la figure ci-dessous représente une zone d'intérêt de l'image de
référence et que la partie inférieure de cette figure représente cette même zone
d'intérêt dans une configuration déformée. Nous pouvons remarquer que la zone de
référence s'est déplacée de 3 pixels vers la droite. Pour déterminer ce déplacement,
il faut créer une fonction discrétisée spatialement en codant chaque niveau de gris
(ce qui est fait directement par la caméra CCD). [2]
Figure 2 : Méthode de corrélation d’images par niveau de gris
Introduisons maintenant une fonction de corrélation qui va permettre de
déterminer le déplacement entre l'état de référence et l'état déformé. Soit f la fonction
discrétisée de l'état de référence et g la fonction discrétisée de l'état déformé (voir
l'image ci-dessus). Si u représente le déplacement suivant l'axe de notre exemple
uniaxial, nous devons avoir :

14
Nous pouvons donc introduire une norme à minimiser :
En supposant que le déplacement u reste petit, nous pouvons développer
l'expression précédente. Il en résulte que minimiser cette norme est exactement
équivalent à maximiser le produit de corrélation :
L'équation obtenue est linéaire en déplacement u. La résolution est donc
triviale. Pour un calcul de déplacement en 2 dimensions cette équation devient
vectorielle et s'écrit d'une manière générale :
Avec :
Une fois que ces principes théoriques sont assimilés, il est nécessaire de
suivre rigoureusement une procédure expérimentale pour assurer une bonne
exécution de la technique.
15
2. PROCEDURES EXPERIMENTALES
La corrélation d’images numériques est une méthode simple et efficace pour
mesurer les déformations à la surface des matériaux. Afin d’assurer cette opération il
convient de préparer l’exécution de l’expérience et suivre un protocole expérimental
rigoureux.
2.1 La préparation de la surface (éprouvette)
La mesure de déformations par corrélation d’images demande un certain
nombre de précautions. Dans certains cas, une préparation de la surface est
nécessaire. Pour que la mesure soit réalisable, il faut que les images comparées
présentent une répartition de points particulière.
Les textures aléatoires répondent parfaitement à ces critères. Un certain
nombre de matériaux tels que des ciments sont donc utilisables directement, sans
préparation. Mais dans d’autres cas, la surface est trop homogène pour réaliser une
mesure par corrélation. La plupart du temps, il faut alors projeter une peinture
blanche, puis pulvériser un léger voile de peinture noire sur la surface étudiée. On
obtient ainsi un mouchetis composé de points plus ou moins gros répartis de manière
aléatoire (on parle de répartition stochastique). Le contraste et la texture ainsi créés
influent directement sur la qualité de la mesure. [3]
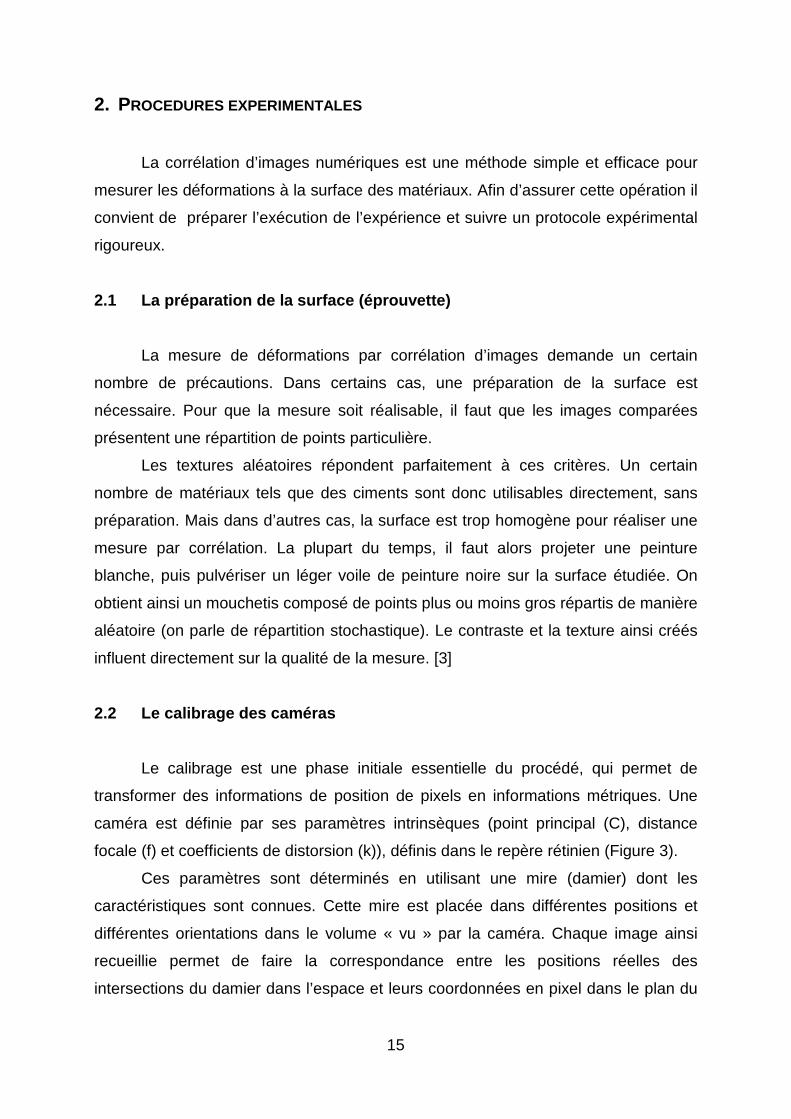
2.2 Le calibrage des caméras
Le calibrage est une phase initiale essentielle du procédé, qui permet de
transformer des informations de position de pixels en informations métriques. Une
caméra est définie par ses paramètres intrinsèques (point principal (C), distance
focale (f) et coefficients de distorsion (k)), définis dans le repère rétinien (Figure 3).
Ces paramètres sont déterminés en utilisant une mire (damier) dont les
caractéristiques sont connues. Cette mire est placée dans différentes positions et
différentes orientations dans le volume « vu » par la caméra. Chaque image ainsi
recueillie permet de faire la correspondance entre les positions réelles des
intersections du damier dans l’espace et leurs coordonnées en pixel dans le plan du
16
CCD. Ces correspondances permettent, par l’algorithme de minimisation, de
déterminer les paramètres intrinsèques de la caméra. Les paramètres dits «
extrinsèques » définissent la translation et la rotation permettant de passer du repère
rétinien de la caméra 1 vers celui de la caméra 2. Ils sont déterminés à partir d’une
image (au minimum) de la même mire. A partir de ces données de calibrage, les
coordonnées d’un point 3D de l’espace peuvent être calculées dès lors que l’on
connaît sur quel pixel de la caméra 1 et sur quel pixel de la caméra 2 ce point est vu.
[4]
Figure 3
2.3 L’acquisition des images numériques
Le problème majeur lors de l’acquisition des images numériques est
l’éclairage de la structure étudiée. Les différentes étapes de la chaîne de mesure
reposent sur la corrélation en niveaux de gris. Les images acquises doivent posséder
des niveaux de gris couvrant au mieux cet intervalle sur toute l’image, mais
également localement : les niveaux de gris associés à deux pixels voisins doivent
être distincts. Le motif déposé joue un rôle important. Il doit être aléatoire à l’échelle
à laquelle il est observé. L’éclairage de la structure étudiée, et donc du motif déposé,
ne doit ni être trop intense ni laisser des zones sombres qui induisent une saturation
du capteur CCD. L’idéal est donc l’éclairage indirect. Le laboratoire doit disposer d’un
local sans fenêtre (pour éviter l’influence des variations de l’intensité lumineuse
17
extérieure) avec des projecteurs de 500 W permettant d’obtenir une lumière
puissante et diffuse dans la pièce. Si les caméras doivent être installées à proximité
d’une machine ou sur un site industriel, un parapluie de photographe éclairé par une
lumière intense permet d’obtenir une lumière diffuse. Enfin, une source de lumière
froide peut être utilisée. [6]
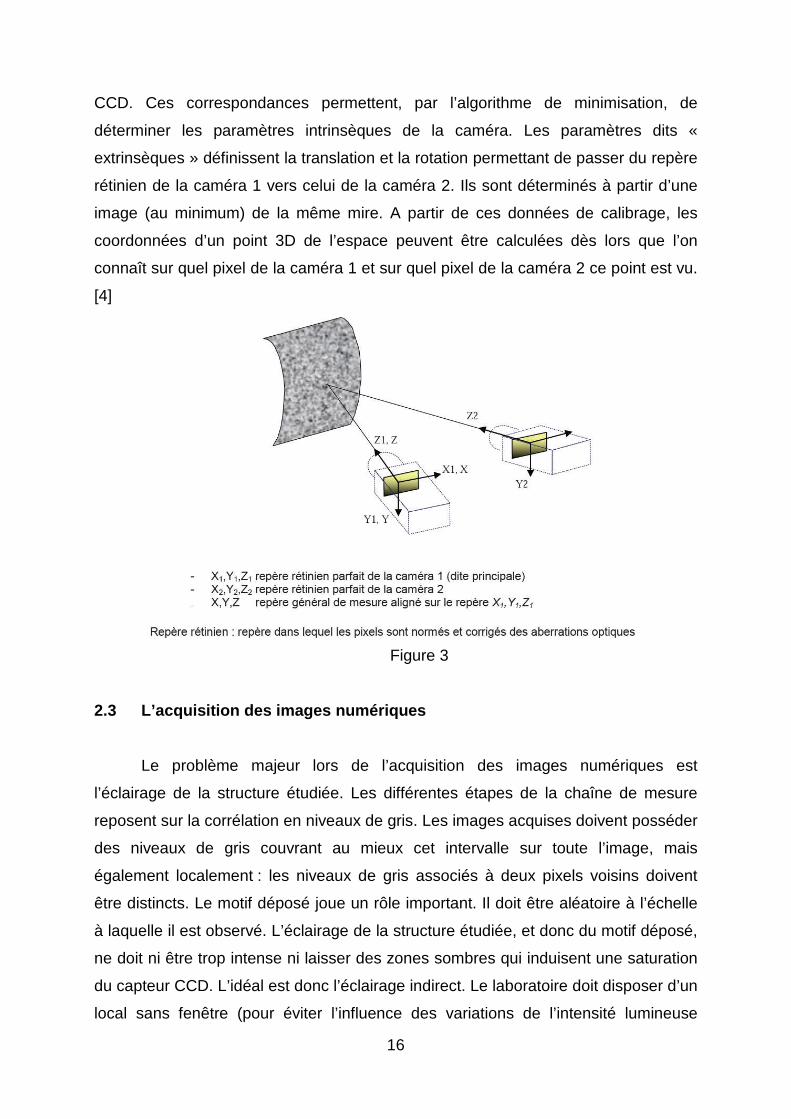
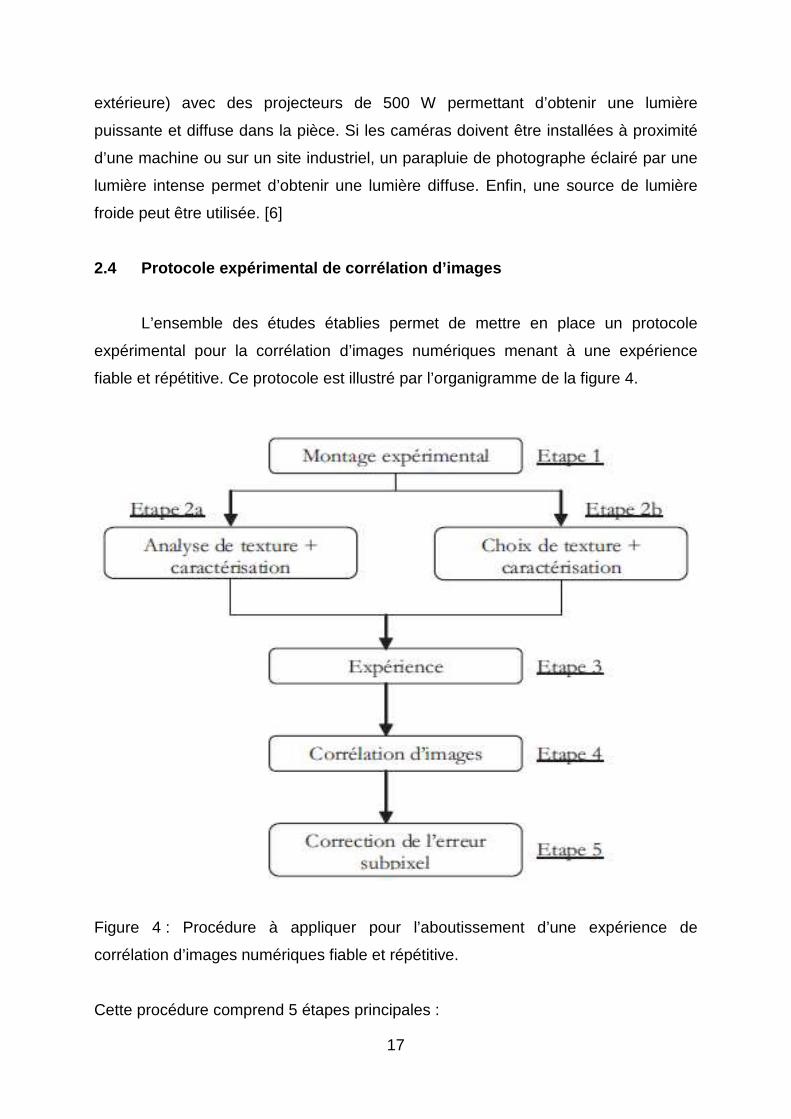
2.4 Protocole expérimental de corrélation d’image s
L’ensemble des études établies permet de mettre en place un protocole
expérimental pour la corrélation d’images numériques menant à une expérience
fiable et répétitive. Ce protocole est illustré par l’organigramme de la figure 4.
Figure 4 : Procédure à appliquer pour l’aboutissement d’une expérience de
corrélation d’images numériques fiable et répétitive.
Cette procédure comprend 5 étapes principales :
18
Etape 1 : Elle consiste à effectuer les montages et réglages expérimentaux
préliminaires. Il doit notamment y être effectué une détermination et une minimisation
des erreurs et bruits, c’est à dire positionnement, variations d’éclairage, choix du
matériel d’observation et d’enregistrement en fonction de l’expérience, etc.
Etape 2 : L’expérimentateur doit commencer par « choisir » la texture la mieux
adaptée à son étude et aux performances attendues. Sinon analyser la texture afin
de permettre la détermination des paramètres de la corrélation, c’est à dire la texture,
la taille de la ZOI n et ΔP, Etape 2a et ensuite la caractérisation de l’expérience.
Dans le cas inverse, une combinaison de l’étude de texture avec la détermination de
l’incertitude permet à l’expérimentateur de procéder à un compromis entre les 3
paramètres. En effet, le choix peut aussi bien être fait sur la taille de ZOI ou le
décalage que par une reprise de la texture pour l’obtention d’une texture
satisfaisante. Quoi qu’il en soit, à la fin de cette étape, les paramètres de la
corrélation d’images numériques doivent être définis pour le type d’étude mené et les
performances souhaitées.
Etape 3 : On procède à l’expérience et à la prise de la séquence d’images à
analyser.
Etape 4 : Le traitement par corrélation d’images numériques est effectué par le
logiciel choisi en fonction des paramètres établis lors de l’étape 2. De plus, un
algorithme de dérivation numérique peut être appliqué aux résultats pour l’obtention
des cartes de déformations.
Etape 5 : Les fichiers de corrélation peuvent être traités par la procédure de
correction de l’erreur subpixel.
Ce protocole a été établi dans le cas de l’utilisation du logiciel Correlilmt .
Néanmoins, les principes des analyses effectuées sont valables pour tous les
logiciels de corrélation. Seuls les paramètres peuvent être sensiblement différents,
mais ils sont toujours représentatifs des mêmes propriétés. Ainsi, certains logiciels
n’utiliseront pas la taille de la zone sous analyse mais le décalage des centres de ces
dernières ou le nombre de zones, etc. Ces différents paramètres sont tous des
éléments clés de la résolution spatiale de l’expérience et des performances en
incertitude. Il s’agira seulement de mettre en place pour chaque logiciel les
formulations qui lui conviennent [1].
19
3. DOMAINES D’APPLICATION
La mesure de déformation par corrélation d’images numériques est une
méthode en plein devenir. Elle s’adresse déjà à une très large variété d’applications
industrielles : la mesure de déformations ou la détection de fissures sur toutes sortes
d’éprouvettes en traction, mais aussi sur des composants peu accessibles aux
capteurs traditionnels, ou sur des métaux en compression à très haute température.
On l’utilise aussi pour mesurer la déformation de grandes surfaces (mesures de
formes sur un mur d’immeuble, déformation sur un bloc de béton, etc.).
3.1 Caractérisation des matériaux
Le but est d’identifier les lois de comportement des matériaux. Comme pour des
essais classique, la méthode consiste à solliciter des éprouvettes dans une machine
d'essai (flexion, traction, compression, cisaillement, température, etc.) et mesurer les
déplacements, déformations, rayonnements provoqués. La corrélation d'images
s'applique parfaitement aux métaux, élastomères et composites.
3.2 Numérisation 3D et emboutissage
Le but est de numériser une surface tridimensionnelle par un procédé optique, sans
contact, avec une bonne précision et une grande rapidité. La méthode consiste au
marquage matériel ou projection optique de la surface avec une texture aléatoire
(mouchetis) et au traitement d'une paire d'images stéréoscopiques par corrélation. La
technique est utilisée en ingénierie inverse, protypage, contrôles dimensionnels ;
pour l’emboutissage : calcul des Courbes Limites de Formage, etc.
3.3 Haute vitesse : Pyrotechnique et crash-tests
Le but est d’étudier les déplacements et les déformations de pièces et de structures
pendant un impact. La technique peut être utilisée pour des essais de choc
automobile (Crash test), l’étude de munition et de blindage, la caractérisation de
matériaux soumis à des chocs.

20
Suivant le matériel utilisé, il est également possible d’aller plus loin et
d’appliquer la méthode à des phénomènes transitoires, ou même périodiques. Les
applications “classiques” ne requièrent en effet que des caméras numériques
capables de prendre de 10 à 15 images par secondes. Mais en les remplaçant par
des caméras rapides (et sous réserve que le logiciel et la puissance du PC soient
adaptés à l’application), on peut avoir accès à une grande variété de phénomènes
transitoires : la déformation de l’éclatement d’un capot d’airbag, la propagation d’une
fissure dans une céramique, un essai de traction à très haute vitesse, etc. [7]

21
LA TECHNOLOGIE
4. MATERIELS
La mise en œuvre de la technique de mesure de champ de déplacement par
corrélation d’images nécessite l’utilisation d’équipement spécifique et adapté.
Généralement le processus de la vision comporte en particulier deux étapes :
l’acquisition des images et leur traitement. Ce chapitre présente le matériel principale
servant à l’acquisition d’image : caméras ou appareil photo numérique, objectifs,
supports, mires étalonnage et dispositifs d’éclairage (Figure 5).
Figure 5 : Matériels de mesure par corrélation d'images
22
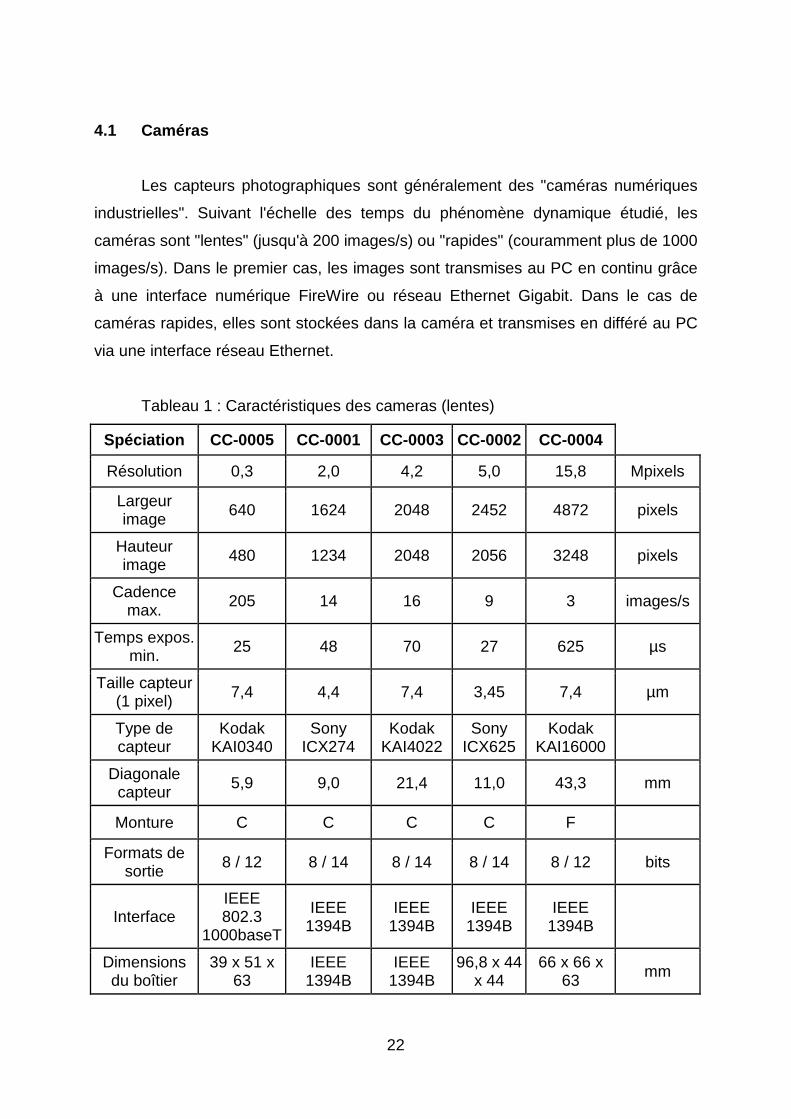
4.1 Caméras
Les capteurs photographiques sont généralement des "caméras numériques
industrielles". Suivant l'échelle des temps du phénomène dynamique étudié, les
caméras sont "lentes" (jusqu'à 200 images/s) ou "rapides" (couramment plus de 1000
images/s). Dans le premier cas, les images sont transmises au PC en continu grâce
à une interface numérique FireWire ou réseau Ethernet Gigabit. Dans le cas de
caméras rapides, elles sont stockées dans la caméra et transmises en différé au PC
via une interface réseau Ethernet.
Tableau 1 : Caractéristiques des cameras (lentes)
Spéciation CC-0005 CC-0001 CC-0003 CC-0002 CC-0004
Résolution 0,3 2,0 4,2 5,0 15,8 Mpixels
Largeur image
640 1624 2048 2452 4872 pixels
Hauteur image
480 1234 2048 2056 3248 pixels
Cadence max.
205 14 16 9 3 images/s
Temps expos. min.
25 48 70 27 625 µs
Taille capteur (1 pixel)
7,4 4,4 7,4 3,45 7,4 µm
Type de capteur
Kodak KAI0340
Sony ICX274
Kodak KAI4022
Sony ICX625
Kodak KAI16000
Diagonale capteur
5,9 9,0 21,4 11,0 43,3 mm
Monture C C C C F Formats de
sortie 8 / 12 8 / 14 8 / 14 8 / 14 8 / 12 bits
Interface IEEE 802.3
1000baseT
IEEE 1394B
IEEE 1394B
IEEE 1394B
IEEE 1394B
Dimensions du boîtier
39 x 51 x 63
IEEE 1394B
IEEE 1394B
96,8 x 44 x 44
66 x 66 x 63 mm
23
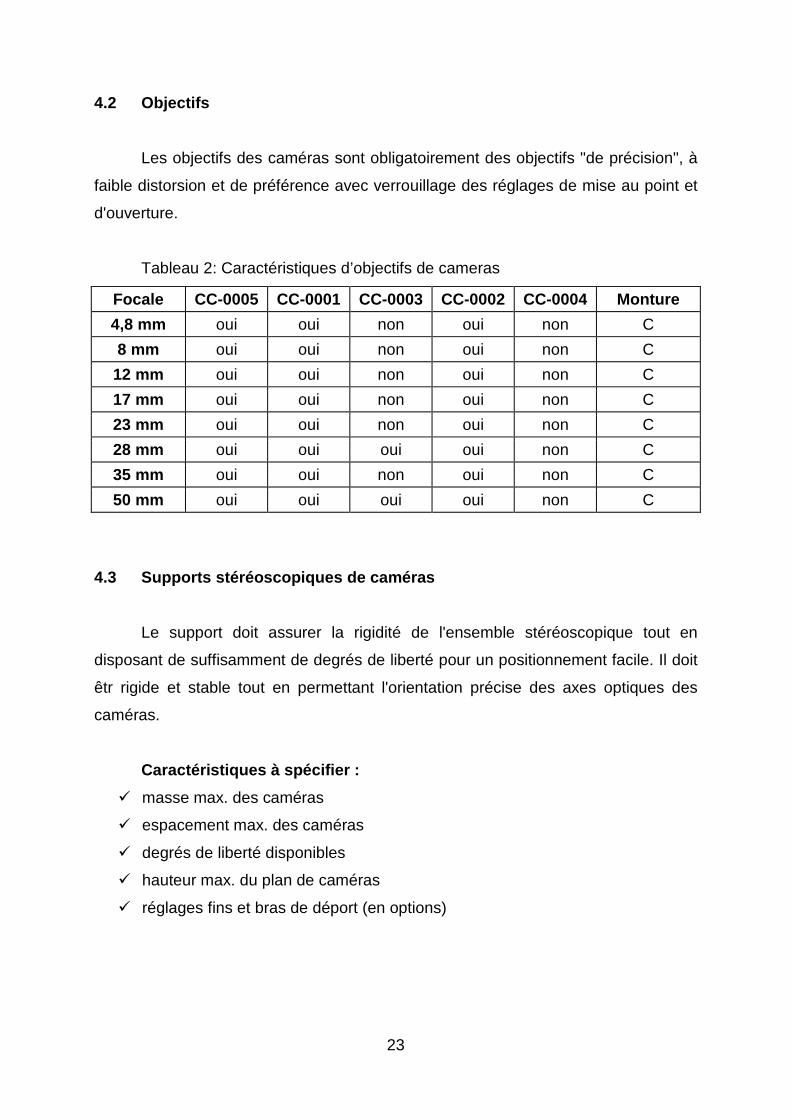
4.2 Objectifs
Les objectifs des caméras sont obligatoirement des objectifs "de précision", à
faible distorsion et de préférence avec verrouillage des réglages de mise au point et
d'ouverture.
Tableau 2: Caractéristiques d’objectifs de cameras
Focale CC-0005 CC-0001 CC-0003 CC-0002 CC-0004 Monture
4,8 mm oui oui non oui non C
8 mm oui oui non oui non C
12 mm oui oui non oui non C
17 mm oui oui non oui non C
23 mm oui oui non oui non C
28 mm oui oui oui oui non C
35 mm oui oui non oui non C
50 mm oui oui oui oui non C
4.3 Supports stéréoscopiques de caméras
Le support doit assurer la rigidité de l'ensemble stéréoscopique tout en
disposant de suffisamment de degrés de liberté pour un positionnement facile. Il doit
êtr rigide et stable tout en permettant l'orientation précise des axes optiques des
caméras.
Caractéristiques à spécifier :
� masse max. des caméras
� espacement max. des caméras
� degrés de liberté disponibles
� hauteur max. du plan de caméras
� réglages fins et bras de déport (en options)

24
4.4 Mires d’étalonnage
Les mires d'étalonnage planes utilisées dans le système VIC-3D sont
précises, stables (sur plaques en nid d'abeille ou verre) et minimisent les reflets
(sérigraphie sur film mat). Leur surface utile, de quelques mm² à près d'un m²
couvrent de nombreuses configurations d'essai. Les mires d'étalonnage ont plusieurs
fonctions :
� Etalonnage du système stéréoscopique : détermination des paramètres
intrinsèques des caméras et caractérisation géométrique du système
stéréoscopique : le logiciel identifie sans ambiguïté les trois points particuliers de
la mire qui définissent un triangle rectangle de dimensions connues, quelle que
soit leurs positions dans l'image. Pour cet étalonnage, les trois points particuliers
de la mire doivent être "vus" par les deux caméras.
� Correction de distorsion des objectifs : certains logiciels de stéréo-corrélation
utilisent l'ensemble de la grille de points de la mire pour calculer un modèle
d'ordre paramétrable de la distorsion de chaque caméra.
� Détermination d'un référentiel : une position de la grille peut être choisie comme
définissant le référentiel de travail XOY.
Figure 6 : Mire d’étalonnage
25
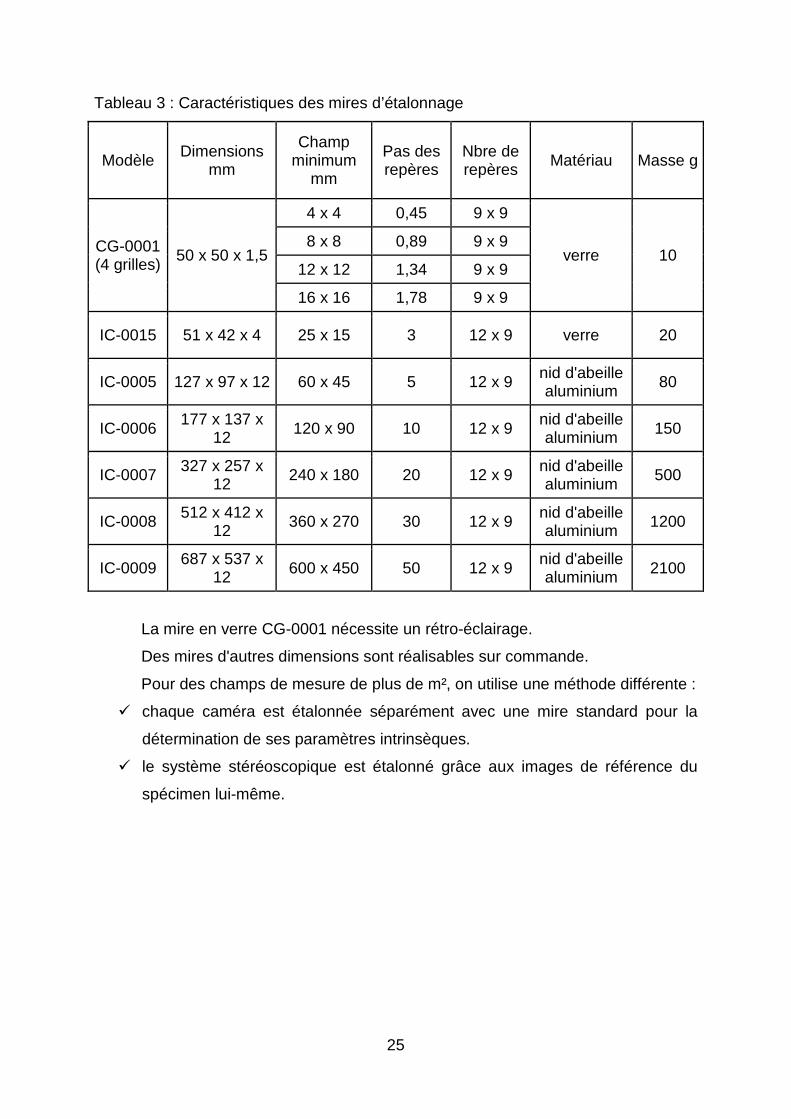
Tableau 3 : Caractéristiques des mires d’étalonnage
Modèle Dimensions mm
Champ minimum
mm
Pas des repères
Nbre de repères
Matériau Masse g
CG-0001 (4 grilles)
50 x 50 x 1,5
4 x 4 0,45 9 x 9
verre 10 8 x 8 0,89 9 x 9
12 x 12 1,34 9 x 9
16 x 16 1,78 9 x 9
IC-0015 51 x 42 x 4 25 x 15 3 12 x 9 verre 20
IC-0005 127 x 97 x 12 60 x 45 5 12 x 9 nid d'abeille aluminium
80
IC-0006 177 x 137 x
12 120 x 90 10 12 x 9 nid d'abeille aluminium 150
IC-0007 327 x 257 x 12
240 x 180 20 12 x 9 nid d'abeille aluminium
500
IC-0008 512 x 412 x 12
360 x 270 30 12 x 9 nid d'abeille aluminium
1200
IC-0009 687 x 537 x
12 600 x 450 50 12 x 9 nid d'abeille aluminium 2100
La mire en verre CG-0001 nécessite un rétro-éclairage.
Des mires d'autres dimensions sont réalisables sur commande.
Pour des champs de mesure de plus de m², on utilise une méthode différente :
� chaque caméra est étalonnée séparément avec une mire standard pour la
détermination de ses paramètres intrinsèques.
� le système stéréoscopique est étalonné grâce aux images de référence du
spécimen lui-même.
26
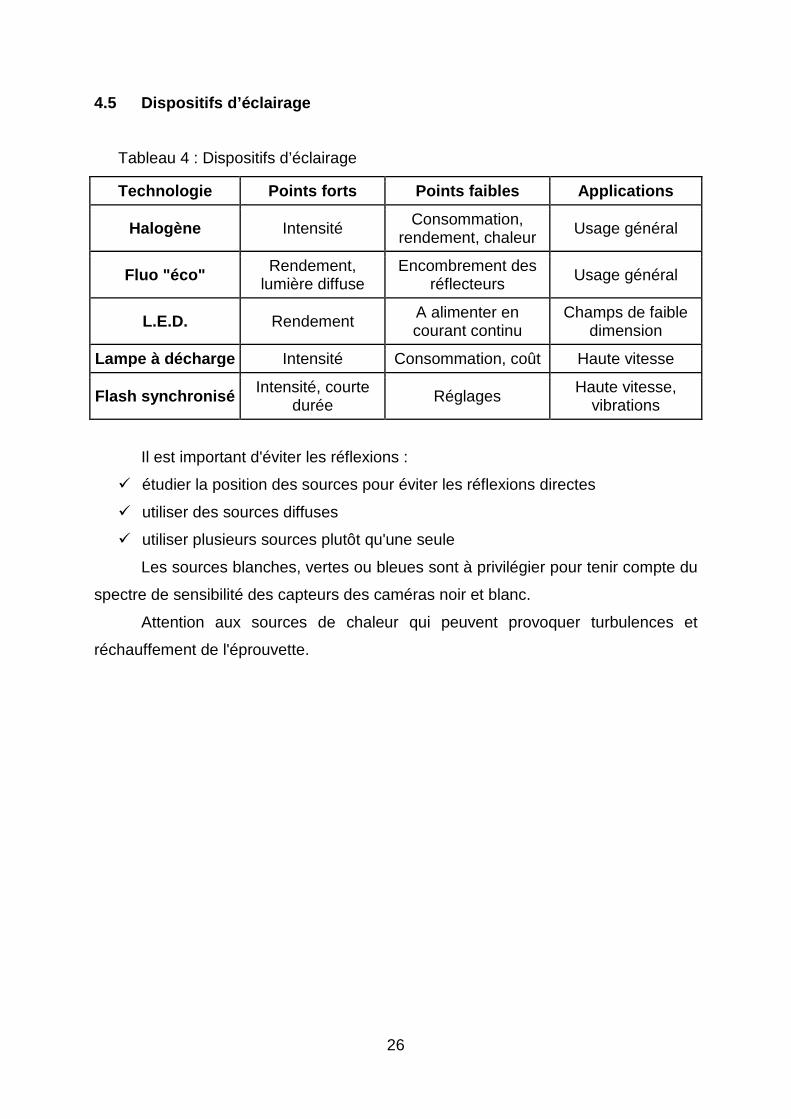
4.5 Dispositifs d’éclairage
Tableau 4 : Dispositifs d’éclairage
Technologie Points forts Points faibles Applications
Halogène Intensité Consommation, rendement, chaleur
Usage général
Fluo "éco" Rendement, lumière diffuse
Encombrement des réflecteurs Usage général
L.E.D. Rendement A alimenter en courant continu
Champs de faible dimension
Lampe à décharge Intensité Consommation, coût Haute vitesse
Flash synchronisé Intensité, courte durée Réglages
Haute vitesse, vibrations
Il est important d'éviter les réflexions :
� étudier la position des sources pour éviter les réflexions directes
� utiliser des sources diffuses
� utiliser plusieurs sources plutôt qu'une seule
Les sources blanches, vertes ou bleues sont à privilégier pour tenir compte du
spectre de sensibilité des capteurs des caméras noir et blanc.
Attention aux sources de chaleur qui peuvent provoquer turbulences et
réchauffement de l'éprouvette.

27
5. LOGICIELS
La fonction d’un logiciel de corrélation d’images numériques classique est
d’identifier au mieux la transformation bidimensionnelle (ou tridimensionnelle) liant
une image numérique de référence à une image déformée selon un certain principe
de conservation de flot optique. Une fois que l’essai est mené et que les images
représentatives des différents états mécaniques sont numérisées, les champs de
déplacements sont extraits grâce à un logiciel de traitement par corrélation.
La corrélation d’images numériques n’étant pas définie par des standards, de
nombreux laboratoires ont créé leur propre logiciel de traitement. On distingue ainsi
des logiciels commerciaux (VIC-3D, AMARIS, ICASOF, ASAME, etc) ou
universitaires (CORRELI et autres pour lesquels nous n’avons pas eu d’information).
5.1 VIC-3D
La série VIC-3D est une solution de mesure optique utilisant la technologie de
corrélation d’images numériques. Elle est composée de trois logiciels proposés par
la société Correlated Solutions Inc. Il s’agit des logiciels VIC-SMAP qui sert à
l’acquisition d’images, VIC-3D pour la corrélation 3D et VIC-2D pour la corrélation
2D. Les fonctions et caractéristiques de chacun de ces logiciels sont données en
annexe. [9]
5.2 ARAMIS
GOM fournit une solution complète avec le système ARAMIS pour la mesure,
l’analyse et la création des rapports. Le logiciel permet de piloter la tête de mesure
complète, de synchroniser les mesures, de calculer automatiquement tous les
résultats et de réaliser les post-traitements nécessaires.
ARAMIS est une solution industrielle offrant toutes les fonctionnalités même
pour les recherches les plus avancées. ARAMIS a en standard toutes les fonctions
pour l’import et l’export de données. Les paramètres des matériaux, les données
fournies par la machine lors du test, les signaux analogiques,... peuvent aussi être
utilisés lors du post-traitement. Les données CAO peuvent être lues et utilisées pour
dégauchir ou comparer la pièce.
28
Pour boucler complètement le processus, tous les résultats peuvent être
exportés sous les formats les plus classiques ou librement définis par l’utilisateur.
Toutes les séquences sont automatisables par apprentissage. De nouveaux
modèles d’analyse des données peuvent être facilement définis et utilisés par les
opérateurs. Une interface de Scripting évolué permet les personnalisations les plus
avancées.
Toutes ces fonctions intégrées à ARAMIS permettent :
• Une parfaite intégration dans les procédures de test existants
• Un lien parfait avec les méthodes d’analyse existantes
• L’adaptation à n’importe quelle procédure de test.
5.3 ASAME (Automated Strain Analysis and Measurement Environment)
ASAME est un logiciel de mesure de champs de déformations 3D basé sur
une méthode de stéréovision développé aux Etats-Unis par la société Cam-Sys. Le
calibrage de chacune des caméras est réalisé à partir d’une mire cubique possédant
sur ses faces des points de références et des droites parallèles et perpendiculaires
entre elles. ASAME a été initialement développé pour travailler sur des structures
recouvertes d’une grille régulière. Le module de corrélation en niveaux de gris a été
incorporé dans ASAME par la société CamSys. Cette nouvelle version du logiciel
permet à présent de mesurer des champs de déformations sur des structures
recouvertes d’un motif aléatoire. L’étape de calibrage n’utilise pas la corrélation
puisqu’elle est réalisée à partir du cube, par contre les reconstructions 3D et les
mesures de déformations peuvent être réalisées sur des structures recouvertes d’un
motif aléatoire.
5.4 ICASOFT
ICASOFT est un logiciel de mesure de champs de déplacements et de
déformations 2D basé sur une méthode de corrélation en niveaux de gris, développé
au laboratoire dans le but initialement de déterminer rapidement et précisément des
C.L.F. (Courbes Limites de Formage) et a été utilisé ensuite dans de nombreuses
applications. Ce logiciel a été utilisé dans le cadre de mesures
3D pour effectuer l’appariement entre les différentes images acquises.
29
6. FOURNISSEURS ET PRODUITS
Les fournisseurs de systèmes ou prestataires de mesure optique par la
technique de la corrélation d’images ne sont pas nombreux. Cette technique
relativement récente est en majorité développée dans des laboratoires de recherche
universitaires. Avec quelques années d’expériences certains laboratoires pionniers
de la technologie proposent leurs produits et services à l’industrie et autres
laboratoires.
6.1 Correlated Solutions Inc
Présentation
Correlated Solutions Inc. a été fondée en 1998 pour commercialiser la
technologie de Corrélation d'Images Numériques développée par l'Université de
Caroline du Sud et l'appliquer aux techniques de mesure sans contact. Ses
spécialistes et développeurs bénéficient d'une expérience inégalée de plus de 20 ans
dans le domaine très spécifique de la Corrélation d'Images.
Correlated Solutions propose des solutions complètes pour les essais de
matériaux et de structures. Ce type de mesure purement optique est utilisable pour
des éprouvettes et corps d'épreuve dont les dimensions vont d'une fraction de mm à
plusieurs dizaines de mètres. L'échelle des temps des phénomènes étudiés ne
dépend que des capteurs ou caméras utilisés.
Produit
Les systèmes de corrélation d'images numériques, proposés par la société
Correlated Solutions Inc, sont utilisés pour effectuer des mesures de champs de
déplacements et de déformation sans contact. Selon l'application, il s’agira du
système Vic-2D 2009 qui utilise une caméra pour mesurer dans le plan des
déplacements et des déformations ; ou un système à deux caméras avec Vic-3D
2010 pour mesurer la forme de l'objet, des déplacements et des champs de
déformations en trois dimensions. Une fiche technique décrivant ces produits est
jointe en annexe.
30
6.2 Gom mbH
Présentation
GOM mbH (Gesellschaft für Optische Messtechnik) a été fondée en 1990
comme un « spin-off » de l’Université Technique de Braunschweig. Les produits sont
distribués dans le monde entier à travers un réseau de distributeurs sélectionnés et
formés. [10]
GOM conçoit et fabrique des moyens de mesure sans contact dont
l’application principale et le relevé de forme 3D, la mesure de déplacements et de
déformations 3D. Les systèmes GOM sont principalement utilisés dans l’industrie,
pour le développement de produits, la mise au point des prototypes et préséries, le
contrôle qualité, la caractérisation de matériaux et composants.
Les outils GOM sont utilisés dans le monde entier dans l’industrie automobile,
la construction aéronautique, la fabrication de biens de grande consommation et tous
leurs sous-traitants.
Produit
ARAMIS est conçu pour l’analyse du comportement des composants et
matériaux. Il est idéal pour les expérimentations où une grande résolution spatiale et
temporelle est nécessaire. ARAMIS mesure sans contact, est indépendant du
matériau à tester, fonctionne pour des charges statiques ou dynamiques, et fourni:
les coordonnées 3D de la surface, les déplacements 3D et les vitesses, les tenseurs
de déformations en surface, les taux de déformations.
ARAMIS est la solution pour la détermination des lois de comportement,
l’analyse des composants, la corrélation Simulations / Mesure et le pilotage temps
réel de machines de test. Il permet d’avoir la mesure des déplacements et des
champs de déformation sur la totalité de la surface 3D.
31
6.3 LaVision
Présentation
LaVision a été fondée en 1989 en tant qu’émanation du « Max Planck Institute
» et « Laser Laboratory » de Goettingen, Allemagne. LaVision coopère avec les
scientifiques renommés, les sociétés et instituts de recherche tout autour du globe.
LaVision propose des Systèmes d’Imagerie Laser standards et spécifiques
pour l’étude non-destructive des matériaux, une gamme de caméras haute-
performances (intensifiées et non-intensifiées) et des systèmes de capteurs optiques.
L’équipe LaVision est composée de professionnels hautement expérimentés
en Spectroscopie par Imagerie Laser et techniques optiques dont les techniques de
Corrélation d’Images Digitales (DIC).
Produit
Le StrainMaster 2D/3D DIC LaVision est un outil optique non-intrusif pour
l’analyse des déformations, forme et contraintes des sujets liquides, solides et
granulaire. Le StrainMaster combine la technique la plus avancée de Corrélation
Numérique d’Images (DIC) avec le matériel le plus performant pour fournir un
ensemble d’analyse des matériaux complet et facile d’emploi. Le StrainMaster est
utilisable par toutes les industries étudiant le comportement des matériaux et procure
des résultats rapides et très précis grâce à l’interface PC.
Un grand choix de systèmes StrainMaster est proposé et va des systèmes de
terrain portables ou versions de laboratoire hautement spécialisées. Tous les
systèmes peuvent être configurés en fonction de vos besoins spécifiques et sont
adaptés aux applications industrielles ou académiques et couvrent de très
nombreuses applications.
6.4 Dantec dynamics
Le système de corrélation d'images numériques Q-400 de la société DANTEC
DYNAMICS est un instrument de mesure optique des champs de déformations et de
contraintes, sans contact et en 3D, sur les composants et matériaux. La fiche
technique du produit est en annexe.
32
6.5 Limess Messtechnik and Software GmbH
Présentation
La société Limess Messtechnik and Software GmbH est un leader des
systèmes de mesure optique. Elle a été fondée en 1998 en partenariat avec
l’Université Technique de Karlsruhe.
Limess Messtechnik and Software GmbH développe des systèmes de mesure
par optique pour mesure de déformation, vibrations, mouvements, essais non
destructifs et digitalisation des géométries. Plusieurs représentations ont été crées à
travers le monde pour s’occuper de la distribution de leurs produits.
La force de Limess réside avant tout dans les produits, un conseil compétent,
l'expérience d'application très large, et le support simple et personnel.
Depuis sa création la société LIMESS ne cesse d’accroître sa réputation. Ses
clients en Europe comptent parmi les constructeurs de l’industrie Automobile,
Aéronautique, Chimique ainsi que les Universités et les Instituts de Recherche.
Produit
Un des services de Limess est la corrélation d’images appliquée pour la
mesure de déplacement et de déformation en 3D sans contact d’objets de tout type
de géométrie. Les spécifications techniques (selon les caméras utilisées) suivantes
sont indiquées pour diverses applications de technologie:
Champ de mesure : De 10mm² à 100m²
Précision sur la mesure des déplacements : 0,01 Pixel (ex.: 1µm avec caméra
1Mpixel et une mesure sur une largeur
de champ de 100mm
Précision sur les déformations : 200 µdéf (=0.02%)
Caméras utilisables : De 0,3 MPixel à 16 MPixel
Vitesse des caméras : De 10 images/s à 1000000 images/s
33
ETAT DES LIEUX
7. LES LABORATOIRES DE REFERENCES EN FRANCE
Dans cette partie, nous présentons un ensemble de laboratoires en France qui
développent des recherches expérimentales liées aux mesures des déformations par
la méthode de corrélation d’images numérique.
En général, ces laboratoires font partis des centres de recherche
universitaires et académiques très actifs et reconnus mondialement, rassemblant
plusieurs chercheurs et doctorants.
En effet, ces laboratoires inscrivent leurs activités dans un cadre
multidisciplinaire qui fait l'originalité et la force de ces centres de recherche. Elle
réunit en un même lieu des équipes performantes et de compétences variées,
essentiellement dédiées aux sciences appliquées et aux sciences pour l'ingénieur.
7.1 Laboratoire de Mécanique et Technologie - UM R 8535 - de l’ENS Cachan
Présentation
Le LMT-Cachan, créé en 1975, est une Unité Mixte de Recherche commune
à l’École Normale Supérieure de Cachan, au CNRS (Département des Sciences et
Technologies de l'Information et de l'Ingénierie, UMR 8535) et à l’Université Pierre et
Marie Curie (UPMC). Depuis 2010, le directeur est Ahmed Benallal.
Les activités du LMT-Cachan concernent la modélisation des solides et des
structures : mécanique des matériaux, mécanique expérimentale, simulation
numérique et calcul haute performance. Les fondamentaux du LMT-Cachan reposent
sur la recherche du meilleur niveau international dans chacun de ces domaines.
Il s’agit d’un des laboratoires les plus réputés en France et de l’Ecole Normale
Supérieur de Cachan.
Le LMT-Cachan est organisé en trois secteurs de recherche, eux-mêmes
structurés en 13 unités thématiques de recherche (UTR).

34
Parmi ces secteurs de recherche, figure le secteur nommé "mécanique et
matériaux", dont M. Francois Hild, son responsable, ne cesse de pousser et de
développer des recherches sur les matériaux sous différents angles d’études
expérimentales en utilisant la méthode de corrélation d’images numériques.
Activité en rapport avec la technique de corrélatio n d’images
Le secteur « mécanique et matériaux » est organisé en cinq unités
thématiques de recherche :
� Multi-physique et procédés ;
� Comportement et ruine des matériaux à microstructure aléatoire ;
� Fissuration et Rupture par Fatigue ;
� Comportement, endommagement et instabilités, fissuration et rupture par
fatigue ;
� Comportement dynamique des matériaux.
Au sein du secteur mécanique et matériaux du LMT Cachan la thématique de
recherche sur le comportement et ruine des matériaux à microstructure aléatoire a
des enjeux scientifiques et sociaux avoués. Pour son responsable Stéphane ROUX,
Il s’agit de répondre aux besoins scientifiques de l’industrie en matière d’utilisation
de matériaux et de conception de structures, pour une meilleure maîtrise, dans
leur conception, leur fabrication et leur utilisation, des performances et des
fonctions des systèmes, de leur sécurité et de leur durabilité.
Une des trois directions principales du thème en cours de développement est
la mesure des champs et identification. Il est question du développement de
techniques de mesures et d’identification faisant appel à la texture aléatoire naturelle
ou artificielle des matériaux. Des mesures multi-échelles de champs de déplacement
par corrélation d’images et de température ainsi que des stratégies d’identification
sont développées afin de pouvoir discriminer et valider des modèles
d’endommagement et de rupture. LMT Cachan a développé un logiciel de corrélation
d’images numérique nommé Correli.

35
7.2 Laboratoire de Mécanique des Solides - UMR 7 649 - Polytechnique
(ParisTech)
Présentation
Le laboratoire de Mécanique des Solides de l’Ecole Polytechnique (LMS, UMR
CNRS 7649, Ecole Polytechnique) a été crée en 1961. Son domaine de recherche
porte sur la Mécanique des Milieux Continus, étudiée à des échelles multiples du
triple point de vue théorique, expérimental et numérique.
Par le biais de ces collaborations industrielles et institutionnelles, le laboratoire
est présent sur trois domaines d'application principaux : énergie, transport et
mécanique des systèmes vivants.
Le laboratoire se structure autour de trois pôles de compétences :
� Comportement des matériaux et analyses multi-échelles
� Comportement et durabilité des structures
� Problèmes multidisciplinaires
Ces activités ne sont possibles que grâce au support scientifique et technique et
à l'activité de développement et de recherche de deux plateformes expérimentales:
� La plate forme Moyens d'essais statiques et dynamiques
� La plateforme Microscopie, Mesure de Champs et Analyses
Activité en rapport avec la technique de corrélatio n d’images
La plateforme MiMeCA (Microscopie, Mesures de Champs et Analyses)
regroupe l'ensemble des moyens du LMS pour l'étude du comportement mécanique
des matériaux à l'échelle de leur microstructure. Quatre ingénieurs aux compétences
complémentaires développent ainsi les outils et forment les étudiants et chercheurs à
la microscopie optique, la microscopie électronique à balayage, la préparation de
surface des échantillons, l'analyse chimique, l'analyse cristallographique, la
lithographie, la corrélation d'images numériques, l'émission acoustique ainsi que la
plasticité cristalline. Le laboratoire rassemble enfin un grand nombre de
compétences en modélisation numérique et calcul, elles ont eu à développer un
logiciel de corrélation d’images numérique nommé CorrelManuV.
36
7.3 Laboratoire de Mécanique des Solides - UMR 6 610 – Université de
Poitiers
Présentation
Le Laboratoire de Mécanique des Solides de l’Université de Poitiers (LMS,
UMR CNRS 6610, Université de Poitiers) est un Laboratoire de Recherche à l’écoute
des préoccupations des industries régionales, nationales et internationales.
Il possède un savoir-faire théorique et expérimental en recherche
fondamentale et finalisée ainsi que des compétences numériques qui permettent aux
5 équipes du Laboratoire d’aborder des domaines très variés :
� Mécanique du contact lubrifié
� Mécanismes et Robotique
� Photomécanique et Rhéologie
� Structures et Interfaces
� Mécanique du Geste Sportif
Activité en rapport avec la technique de corrélatio n d’images
L’équipe Photomécanique et Rhéologie développe des logiciels d’acquisition
et d’analyse d’image pour la mesure de relief, de déplacement, de déformation et de
contrainte. Par exemple :
Pour la mesure de déplacement surfacique : Corrélation en lumière
blanche : CORRELA.AVI ou CORRELA.MOV ;
Pour la mesure de déformation : Suivi de marqueurs ou de taches de
diffraction : DEFTAC.AVI ou DEFTAC.MOV et suivi de la déformée d’un réseau de
traits croisé : DEFRES.
37
8. QUELQUES RESULTATS DE R&D
Nous présentons ici les résultats de deux travaux de recherche à l’INSA de
Lyon dans le cadre d’une thèse de doctorat Génie Mécanique [5] ; Il s’agit de :
� Mesure des champs de déplacements sur un fer à repasser en cours de cycle
de chauffage ;
� Etude du champ de déformations d’une coque cylindrique emboutie.
8.1 Mesure des champs de déplacements sur un fer à repasser en cours de
cycle de chauffage
Afin de tester la mesure des champs de déplacements 3D avec le logiciel
ASAME et le module de corrélation, une étude a été réalisée sur un fer à repasser
sous sollicitations thermiques. L'objectif de cette étude est de déterminer les champs
de déplacements sur le profil d’un fer à repasser entre un état froid et un état chaud.
Une étude préalable des champs de déplacements 2D sur le profil global du fer
réalisée à partir de ICASOFT a permis de mettre en évidence les zones les plus
sollicitées. Une étude des champs de déplacements 3D sur cette zone a ensuite été
réalisée. Les résultats des mesures des champs de déplacements obtenus avec
ASAME pourront donc être comparés avec ceux obtenus à partir d’une mesure 2D.
Protocole expérimental
L'acquisition des images numériques pour les mesures 2D et 3D a été réalisée
avec les caméras CCD Hamamatsu. La résolution des images est de 1024x1024
pixels. L'exploitation de ces images numériques est réalisée avec le logiciel
ICASOFT pour les mesures 2D et avec ASAME 4.0 pour les mesures 3D.
Le fer a été, dans un premier temps, recouvert de peinture blanche résistante
à très haute température. Un mouchetis noir a ensuite été déposé avec une bombe
de peinture pour obtenir le motif aléatoire. Pour les mesures 2D, la caméra
numérique est placée à une distance d'environ 2.5 mètres du fer à repasser, posé à
l'horizontal sur le socle, afin de visualiser entièrement la zone d’étude. Pour les
mesures 3D, le banc stéréoscopique est placé à une distance d’environ 1 mètre du
fer à repasser.
38
Essais réalisés
Le but de ces essais est de quantifier les déplacements des différentes parties
constituant ces fers à repasser, sous sollicitation thermique. L'état initial correspond
à l'état froid, le fer est débranché et à température ambiante. L'état final correspond à
l'état chaud, après environ 20 minutes de fonctionnement du fer à repasser.
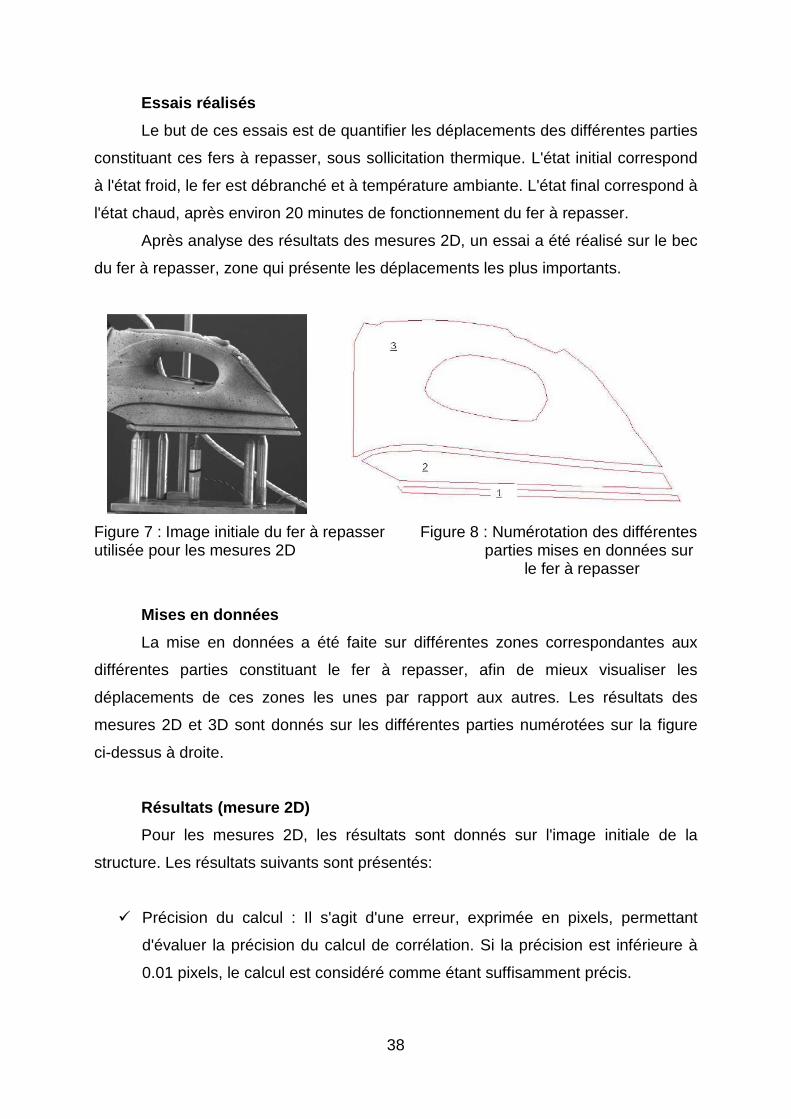
Après analyse des résultats des mesures 2D, un essai a été réalisé sur le bec
du fer à repasser, zone qui présente les déplacements les plus importants.
Figure 7 : Image initiale du fer à repasser Figure 8 : Numérotation des différentes utilisée pour les mesures 2D parties mises en données sur le fer à repasser
Mises en données
La mise en données a été faite sur différentes zones correspondantes aux
différentes parties constituant le fer à repasser, afin de mieux visualiser les
déplacements de ces zones les unes par rapport aux autres. Les résultats des
mesures 2D et 3D sont donnés sur les différentes parties numérotées sur la figure
ci-dessus à droite.
Résultats (mesure 2D)
Pour les mesures 2D, les résultats sont donnés sur l'image initiale de la
structure. Les résultats suivants sont présentés:
� Précision du calcul : Il s'agit d'une erreur, exprimée en pixels, permettant
d'évaluer la précision du calcul de corrélation. Si la précision est inférieure à
0.01 pixels, le calcul est considéré comme étant suffisamment précis.
39
� Champ de déplacements dans la direction 1 : La direction 1 correspond à la
direction horizontale de l'image. Le champ de déplacements est exprimé en
pixels, puisque les mesures sont réalisées directement sur les images. Pour
cet essai, 1 pixel correspond à 0.27 mm.
� Champ de déplacements dans la direction 2: La direction 2 correspond à la
direction verticale de l'image. Le champ de déplacements est exprimé en
pixels. Pour cet essai, 1 pixel correspond à 0.27 mm.
� Magnitude: Il s'agit de la norme du vecteur déplacement.
� Déformée: Le calcul du champ de déplacements s'effectuant sur chaque
pattern d'un maillage virtuel, il est possible de visualiser ce maillage déformé.
Le maillage virtuel initial de la zone d'étude est représenté en gris. Le maillage
virtuel déformé est représenté en jaune.
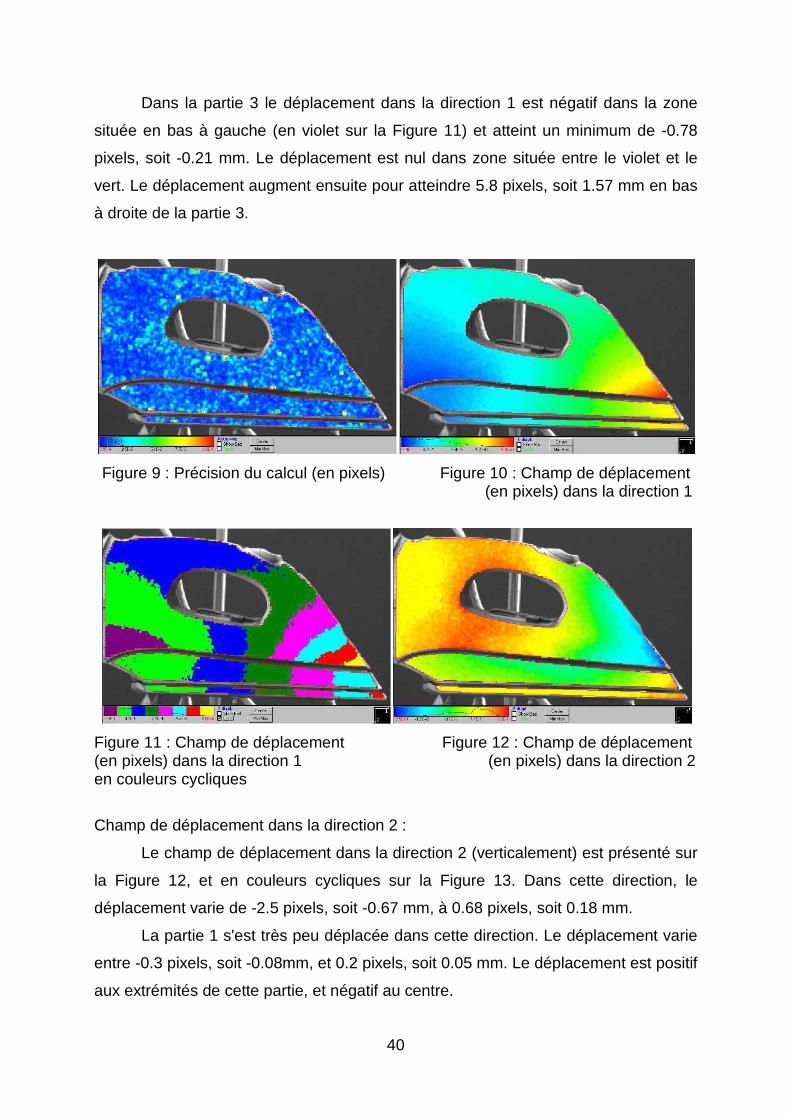
Précision du calcul :
La moyenne de l'erreur de corrélation est de 6.86E-3 pixels (Figure 9), soit
1.85E-3 mm. Globalement, les calculs ont donc été réalisés avec une bonne
précision. Plus localement, l'erreur de corrélation est supérieure à 0.01 pixels (zones
en bleu ciel et vert). Les résultats sur ces zones sont donc à relativiser par rapport à
la précision du calcul.
Champ de déplacements dans la direction 1 :
Le champ de déplacement dans la direction 1 (horizontalement) est présenté
sur la Figure 10, et en couleurs cycliques sur la Figure 11. Dans cette direction, le
déplacement varie de -0.78 pixels, soit -0.21 mm, à 5.8 pixels, soit 1.57 mm.
L'extrémité gauche de la partie 1 ne s'est pas déplacée dans la direction 1. Le
déplacement dans la direction 1 augmente en se rapprochant de l'extrémité droite qui
atteint un déplacement maximum de 4.4 pixels, soit 1.19 mm.
Le déplacement dans la direction 1 de la partie 2 suit la même évolution que la
partie 1: le déplacement est nul à l'extrémité gauche et atteint 4 pixels, soit 1.08 mm,
à l'extrémité droite.
40
Dans la partie 3 le déplacement dans la direction 1 est négatif dans la zone
située en bas à gauche (en violet sur la Figure 11) et atteint un minimum de -0.78
pixels, soit -0.21 mm. Le déplacement est nul dans zone située entre le violet et le
vert. Le déplacement augment ensuite pour atteindre 5.8 pixels, soit 1.57 mm en bas
à droite de la partie 3.
Figure 9 : Précision du calcul (en pixels) Figure 10 : Champ de déplacement (en pixels) dans la direction 1
Figure 11 : Champ de déplacement Figure 12 : Champ de déplacement (en pixels) dans la direction 1 (en pixels) dans la direction 2 en couleurs cycliques
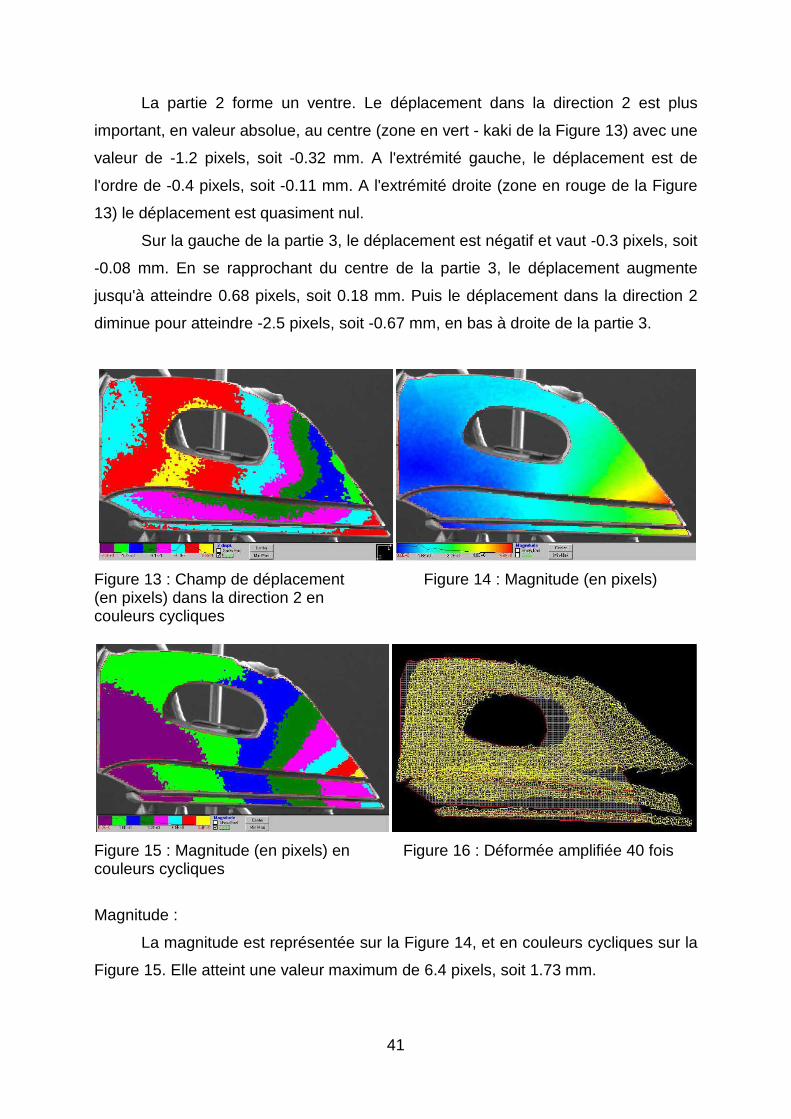
Champ de déplacement dans la direction 2 :
Le champ de déplacement dans la direction 2 (verticalement) est présenté sur
la Figure 12, et en couleurs cycliques sur la Figure 13. Dans cette direction, le
déplacement varie de -2.5 pixels, soit -0.67 mm, à 0.68 pixels, soit 0.18 mm.
La partie 1 s'est très peu déplacée dans cette direction. Le déplacement varie
entre -0.3 pixels, soit -0.08mm, et 0.2 pixels, soit 0.05 mm. Le déplacement est positif
aux extrémités de cette partie, et négatif au centre.
41
La partie 2 forme un ventre. Le déplacement dans la direction 2 est plus
important, en valeur absolue, au centre (zone en vert - kaki de la Figure 13) avec une
valeur de -1.2 pixels, soit -0.32 mm. A l'extrémité gauche, le déplacement est de
l'ordre de -0.4 pixels, soit -0.11 mm. A l'extrémité droite (zone en rouge de la Figure
13) le déplacement est quasiment nul.
Sur la gauche de la partie 3, le déplacement est négatif et vaut -0.3 pixels, soit
-0.08 mm. En se rapprochant du centre de la partie 3, le déplacement augmente
jusqu'à atteindre 0.68 pixels, soit 0.18 mm. Puis le déplacement dans la direction 2
diminue pour atteindre -2.5 pixels, soit -0.67 mm, en bas à droite de la partie 3.
Figure 13 : Champ de déplacement Figure 14 : Magnitude (en pixels) (en pixels) dans la direction 2 en couleurs cycliques
Figure 15 : Magnitude (en pixels) en Figure 16 : Déformée amplifiée 40 fois couleurs cycliques
Magnitude :
La magnitude est représentée sur la Figure 14, et en couleurs cycliques sur la
Figure 15. Elle atteint une valeur maximum de 6.4 pixels, soit 1.73 mm.
42
La magnitude est nulle à l'extrémité gauche de la partie 1 puis augmente
régulièrement pour atteindre 4.4 pixels, soit 1.19 mm à l'extrémité droite.
Sur la partie 2, la magnitude suit la même évolution. Elle vaut 0.3 pixels, soit
0.08 mm, à l'extrémité gauche puis augmente progressivement pour atteindre 4.1
pixels, soit 1.11 mm, à l'extrémité droite.
Sur la gauche de la partie 3, la magnitude est quasiment nulle. Elle atteint son
maximum, 6.4 pixels, soit 1.73 mm, en bas à droite de la partie 3.
Déformée :
Le déplacement du fer à repasser peut être visualisé par la déformée. Cette
déformée est amplifiée 40 fois sur la Figure 16.
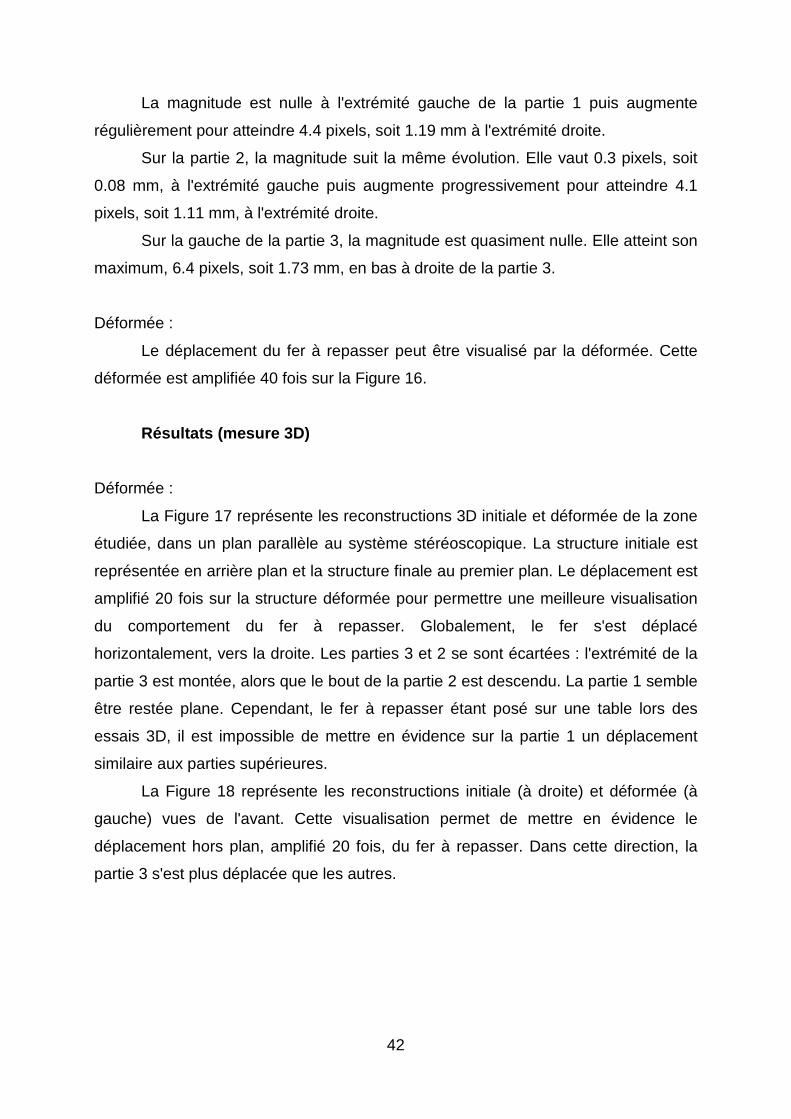
Résultats (mesure 3D)
Déformée :
La Figure 17 représente les reconstructions 3D initiale et déformée de la zone
étudiée, dans un plan parallèle au système stéréoscopique. La structure initiale est
représentée en arrière plan et la structure finale au premier plan. Le déplacement est
amplifié 20 fois sur la structure déformée pour permettre une meilleure visualisation
du comportement du fer à repasser. Globalement, le fer s'est déplacé
horizontalement, vers la droite. Les parties 3 et 2 se sont écartées : l'extrémité de la
partie 3 est montée, alors que le bout de la partie 2 est descendu. La partie 1 semble
être restée plane. Cependant, le fer à repasser étant posé sur une table lors des
essais 3D, il est impossible de mettre en évidence sur la partie 1 un déplacement
similaire aux parties supérieures.
La Figure 18 représente les reconstructions initiale (à droite) et déformée (à
gauche) vues de l'avant. Cette visualisation permet de mettre en évidence le
déplacement hors plan, amplifié 20 fois, du fer à repasser. Dans cette direction, la
partie 3 s'est plus déplacée que les autres.
43
Figure 17 : Reconstructions initiale Figure 18 : Reconstructions initiales et déformée vues de face (le déplacement et déformée vues de l’avant (le de la déformée est amplifiée 20 fois) déplacement de la déformée est
amplifiée 20 fois)
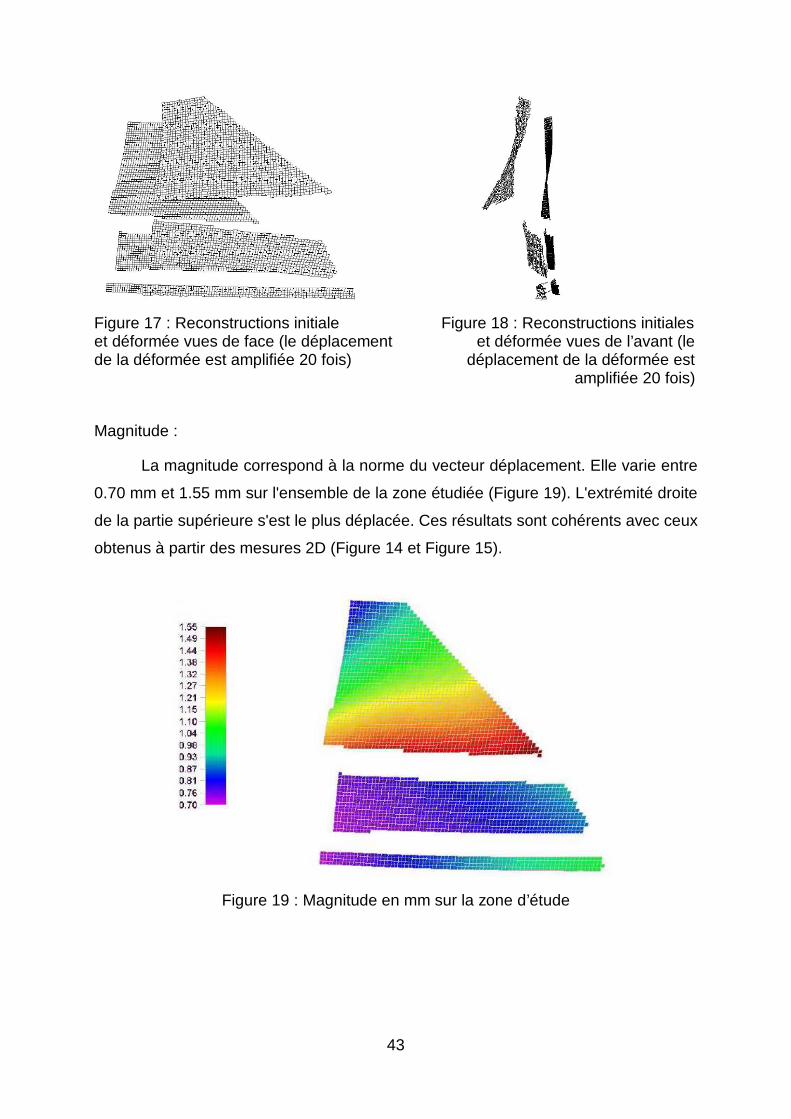
Magnitude :
La magnitude correspond à la norme du vecteur déplacement. Elle varie entre
0.70 mm et 1.55 mm sur l'ensemble de la zone étudiée (Figure 19). L'extrémité droite
de la partie supérieure s'est le plus déplacée. Ces résultats sont cohérents avec ceux
obtenus à partir des mesures 2D (Figure 14 et Figure 15).
Figure 19 : Magnitude en mm sur la zone d’étude
44
Conclusion
Ces essais ont permis de quantifier les déplacements 2D et 3D du profil d’un
fer à repasser sous sollicitation thermique, en cours de cycle de chauffage. Ils ont
également permis de confronter les résultats obtenus à partir de ICASOFT et d’une
mesure 2D avec ceux obtenus à partir d’ASAME et d’une mesure 3D pour mettre en
évidence la cohérence des résultats obtenus à partir des deux méthodes.
8.2 Etude du champ de déformations d’une coque c ylindrique emboutie
Après avoir utilisé le logiciel ASAME et le module de corrélation pour des
mesures de champs de déplacements 3D, des études de calculs de champs de
déformations ont été réalisées.
L’objectif de cette étude réalisée pour le CEA de Saclay est de déterminer les
champs de déformations sur une coque cylindrique emboutie. Deux paires d’images
sont nécessaires : une image gauche et une image droite de la structure à l’état
initial, et une image gauche et une image droite de la structure déformée. Afin de
calibrer le système, deux images d’un cube de 50 mm de coté ont été utilisées.
L’acquisition des images numériques a été réalisée avec les caméras CCD
Hamamatsu C 4742-95 montées sur un socle lourd. La résolution des images
acquises par chacune des images est de 1024 x 1024 pixels. L’exploitation des
images est réalisée sur PC grâce au logiciel ASAME 4.0.
Préparation
Pour pouvoir déterminer les champs de déformations à partir du logiciel
ASAME, la structure étudiée doit être recouverte d'un motif aléatoire. La coque a
donc été, dans un premier temps, recouverte d’une peinture blanche ; un mouchetis
noir a ensuite été déposé avec une bombe de peinture pour obtenir un motif
aléatoire.
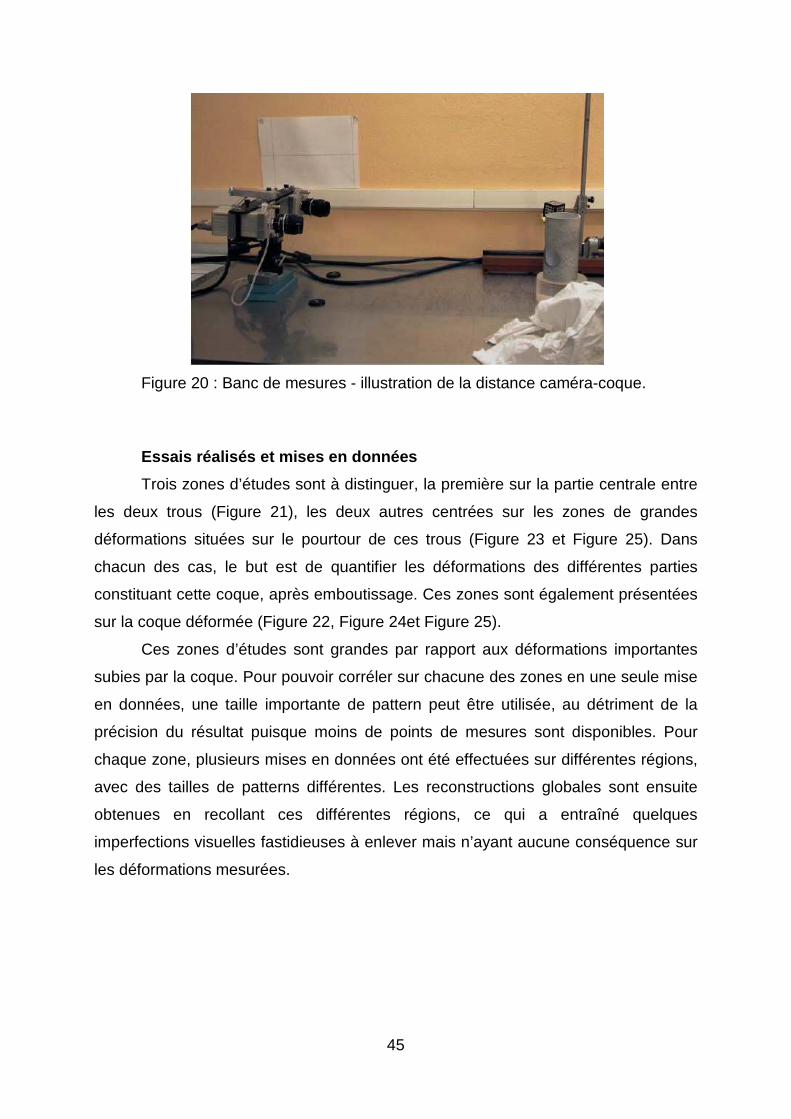
Les caméras numériques sont placées à une distance d'environ 80
centimètres de la coque, fixées sur leur socle, afin de visualiser entièrement les
différentes zones d’études (Figure 20). Il aurait été plus judicieux de se placer un peu
plus loin pour pouvoir observer toutes les zones avec les deux caméras, surtout lors
de l’acquisition des images de la coque déformée.
45
Figure 20 : Banc de mesures - illustration de la distance caméra-coque.
Essais réalisés et mises en données
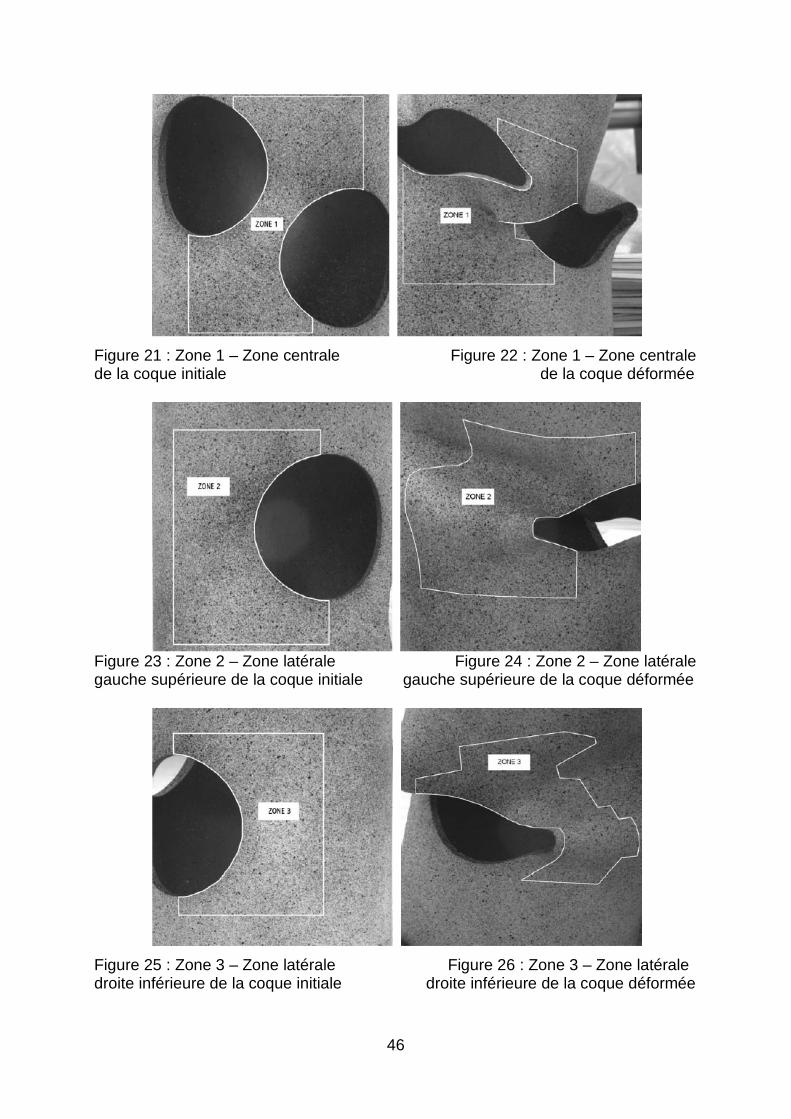
Trois zones d’études sont à distinguer, la première sur la partie centrale entre
les deux trous (Figure 21), les deux autres centrées sur les zones de grandes
déformations situées sur le pourtour de ces trous (Figure 23 et Figure 25). Dans
chacun des cas, le but est de quantifier les déformations des différentes parties
constituant cette coque, après emboutissage. Ces zones sont également présentées
sur la coque déformée (Figure 22, Figure 24et Figure 25).
Ces zones d’études sont grandes par rapport aux déformations importantes
subies par la coque. Pour pouvoir corréler sur chacune des zones en une seule mise
en données, une taille importante de pattern peut être utilisée, au détriment de la
précision du résultat puisque moins de points de mesures sont disponibles. Pour
chaque zone, plusieurs mises en données ont été effectuées sur différentes régions,
avec des tailles de patterns différentes. Les reconstructions globales sont ensuite
obtenues en recollant ces différentes régions, ce qui a entraîné quelques
imperfections visuelles fastidieuses à enlever mais n’ayant aucune conséquence sur
les déformations mesurées.
46
Figure 21 : Zone 1 – Zone centrale Figure 22 : Zone 1 – Zone centrale de la coque initiale de la coque déformée
Figure 23 : Zone 2 – Zone latérale Figure 24 : Zone 2 – Zone latérale gauche supérieure de la coque initiale gauche supérieure de la coque déformée
Figure 25 : Zone 3 – Zone latérale Figure 26 : Zone 3 – Zone latérale droite inférieure de la coque initiale droite inférieure de la coque déformée
47
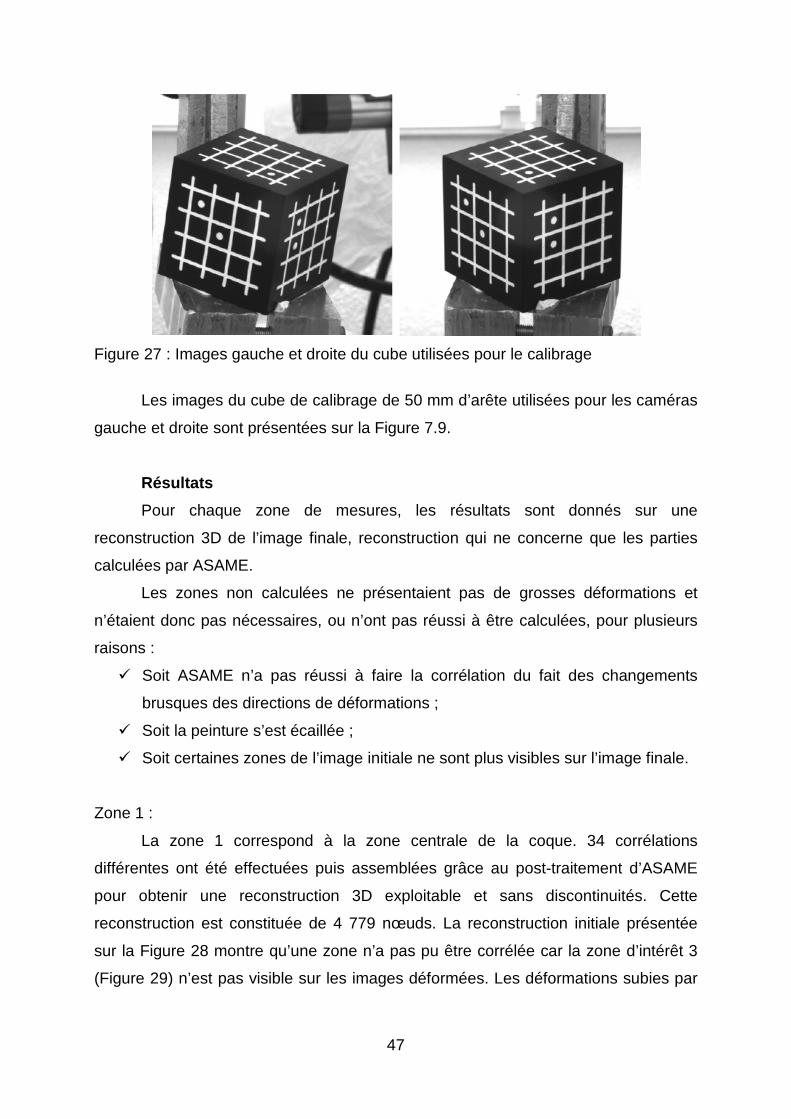
Figure 27 : Images gauche et droite du cube utilisées pour le calibrage
Les images du cube de calibrage de 50 mm d’arête utilisées pour les caméras
gauche et droite sont présentées sur la Figure 7.9.
Résultats
Pour chaque zone de mesures, les résultats sont donnés sur une
reconstruction 3D de l’image finale, reconstruction qui ne concerne que les parties
calculées par ASAME.
Les zones non calculées ne présentaient pas de grosses déformations et
n’étaient donc pas nécessaires, ou n’ont pas réussi à être calculées, pour plusieurs
raisons :
� Soit ASAME n’a pas réussi à faire la corrélation du fait des changements
brusques des directions de déformations ;
� Soit la peinture s’est écaillée ;
� Soit certaines zones de l’image initiale ne sont plus visibles sur l’image finale.
Zone 1 :
La zone 1 correspond à la zone centrale de la coque. 34 corrélations
différentes ont été effectuées puis assemblées grâce au post-traitement d’ASAME
pour obtenir une reconstruction 3D exploitable et sans discontinuités. Cette
reconstruction est constituée de 4 779 nœuds. La reconstruction initiale présentée
sur la Figure 28 montre qu’une zone n’a pas pu être corrélée car la zone d’intérêt 3
(Figure 29) n’est pas visible sur les images déformées. Les déformations subies par
48
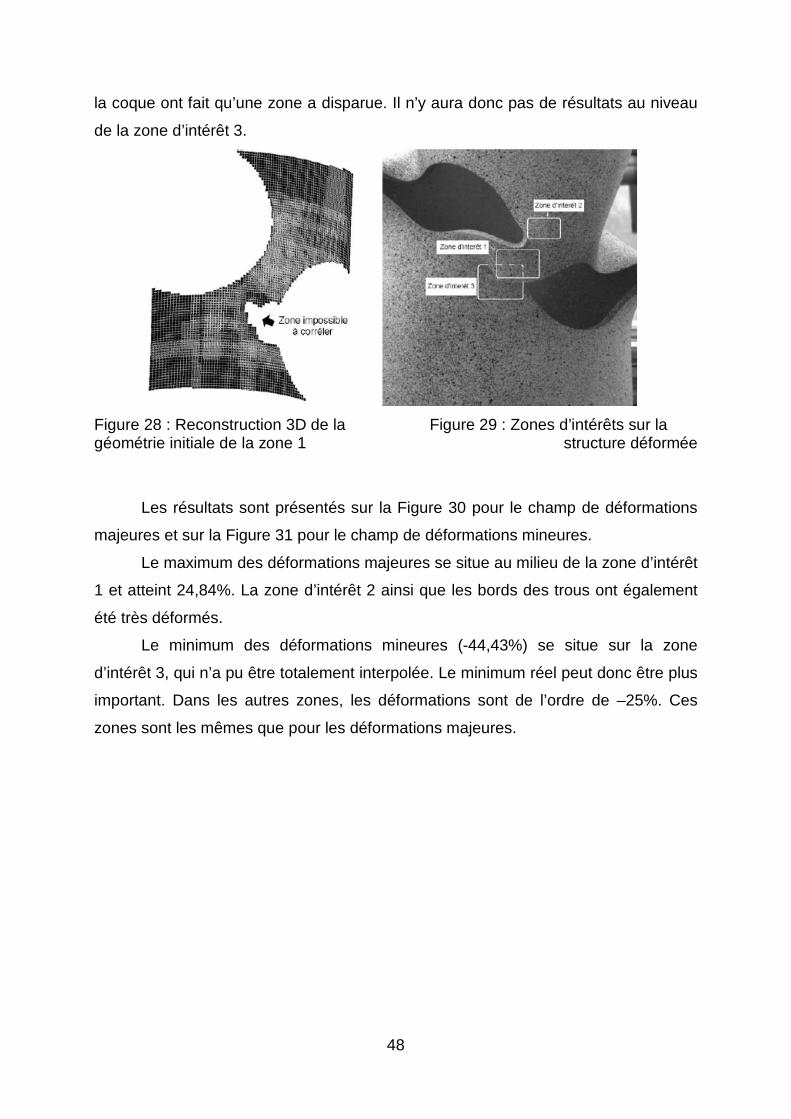
la coque ont fait qu’une zone a disparue. Il n’y aura donc pas de résultats au niveau
de la zone d’intérêt 3.
Figure 28 : Reconstruction 3D de la Figure 29 : Zones d’intérêts sur la géométrie initiale de la zone 1 structure déformée
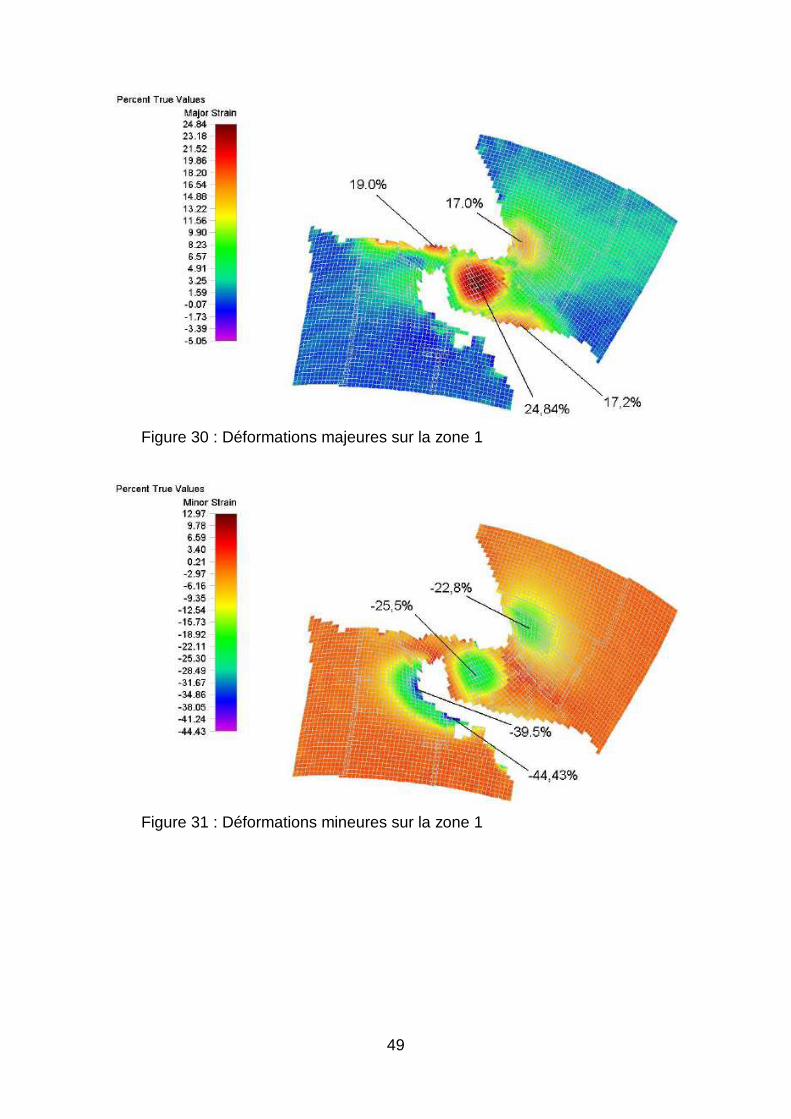
Les résultats sont présentés sur la Figure 30 pour le champ de déformations
majeures et sur la Figure 31 pour le champ de déformations mineures.
Le maximum des déformations majeures se situe au milieu de la zone d’intérêt
1 et atteint 24,84%. La zone d’intérêt 2 ainsi que les bords des trous ont également
été très déformés.
Le minimum des déformations mineures (-44,43%) se situe sur la zone
d’intérêt 3, qui n’a pu être totalement interpolée. Le minimum réel peut donc être plus
important. Dans les autres zones, les déformations sont de l’ordre de –25%. Ces
zones sont les mêmes que pour les déformations majeures.
49
Figure 30 : Déformations majeures sur la zone 1
Figure 31 : Déformations mineures sur la zone 1
50
Zone 2 :
Pour la zone 2, 38 corrélations différentes ont été effectuées puis assemblées
pour obtenir une reconstruction 3D exploitable et sans discontinuités. Cette
reconstruction est constituée de 6 383 nœuds.
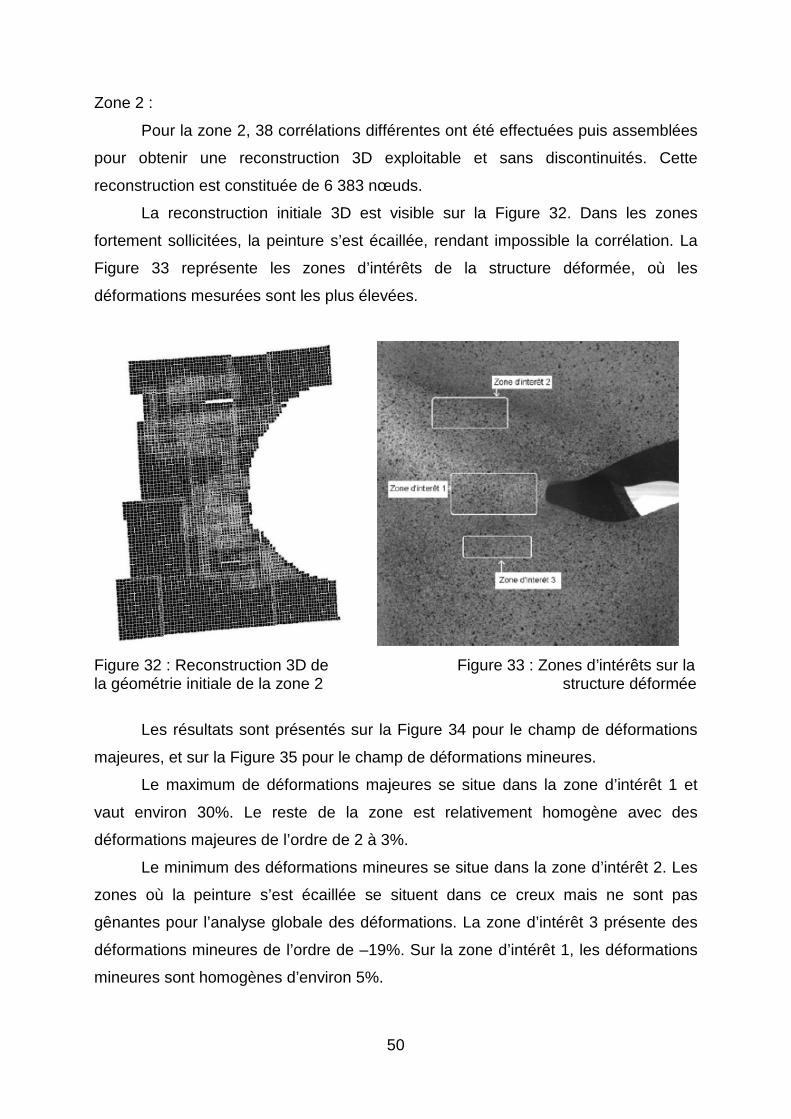
La reconstruction initiale 3D est visible sur la Figure 32. Dans les zones
fortement sollicitées, la peinture s’est écaillée, rendant impossible la corrélation. La
Figure 33 représente les zones d’intérêts de la structure déformée, où les
déformations mesurées sont les plus élevées.
Figure 32 : Reconstruction 3D de Figure 33 : Zones d’intérêts sur la la géométrie initiale de la zone 2 structure déformée
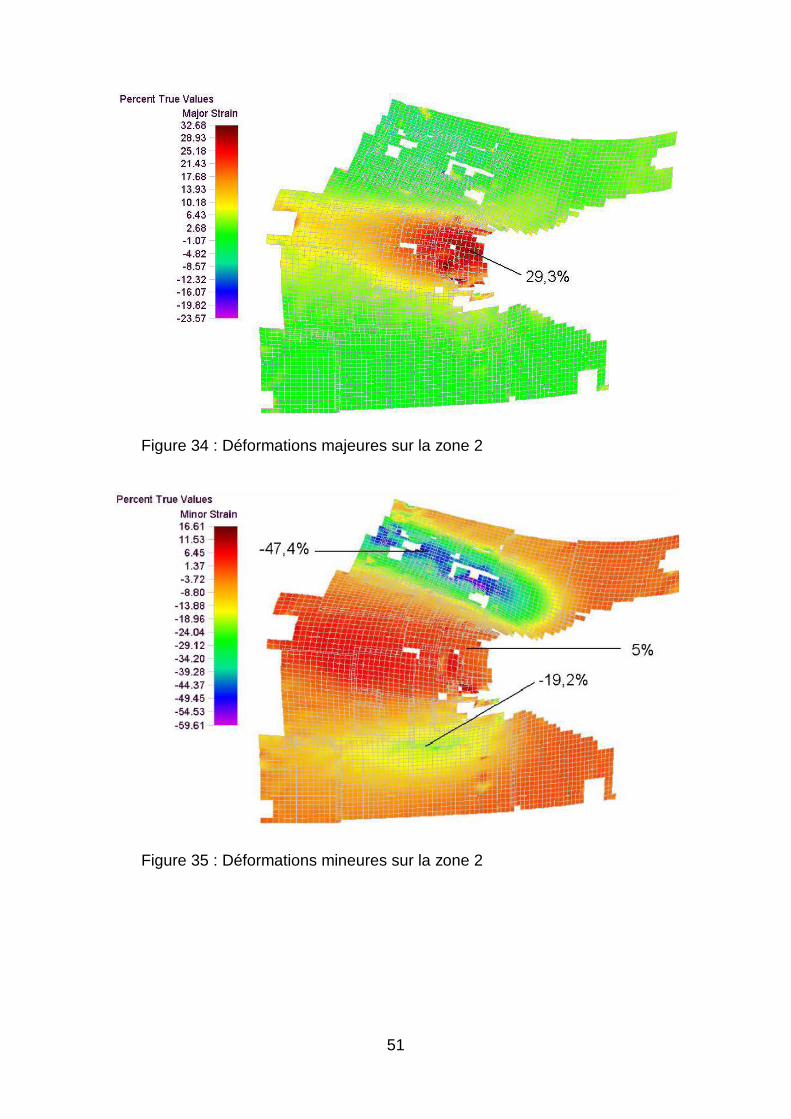
Les résultats sont présentés sur la Figure 34 pour le champ de déformations
majeures, et sur la Figure 35 pour le champ de déformations mineures.
Le maximum de déformations majeures se situe dans la zone d’intérêt 1 et
vaut environ 30%. Le reste de la zone est relativement homogène avec des
déformations majeures de l’ordre de 2 à 3%.
Le minimum des déformations mineures se situe dans la zone d’intérêt 2. Les
zones où la peinture s’est écaillée se situent dans ce creux mais ne sont pas
gênantes pour l’analyse globale des déformations. La zone d’intérêt 3 présente des
déformations mineures de l’ordre de –19%. Sur la zone d’intérêt 1, les déformations
mineures sont homogènes d’environ 5%.
51
Figure 34 : Déformations majeures sur la zone 2
Figure 35 : Déformations mineures sur la zone 2
52
Zone 3
Pour la zone 3, 23 corrélations différentes ont été effectuées puis assemblées
pour obtenir une reconstruction 3D exploitable et sans discontinuités. Cette
reconstruction est constituée de 3 067 noeuds.
La reconstruction initiale 3D est présentée sur la Figure 36. Dans les zones
fortement sollicitées, la peinture s’est écaillée, rendant impossible la corrélation. La
Figure 37 représente les zones d’intérêts de la structure déformée, où les
déformations sont les plus importantes.
Figure 36 : Reconstruction 3D de la Figure 37 : Zones d’intérêts sur la géométrie initiale de la zone 3 structure déformée
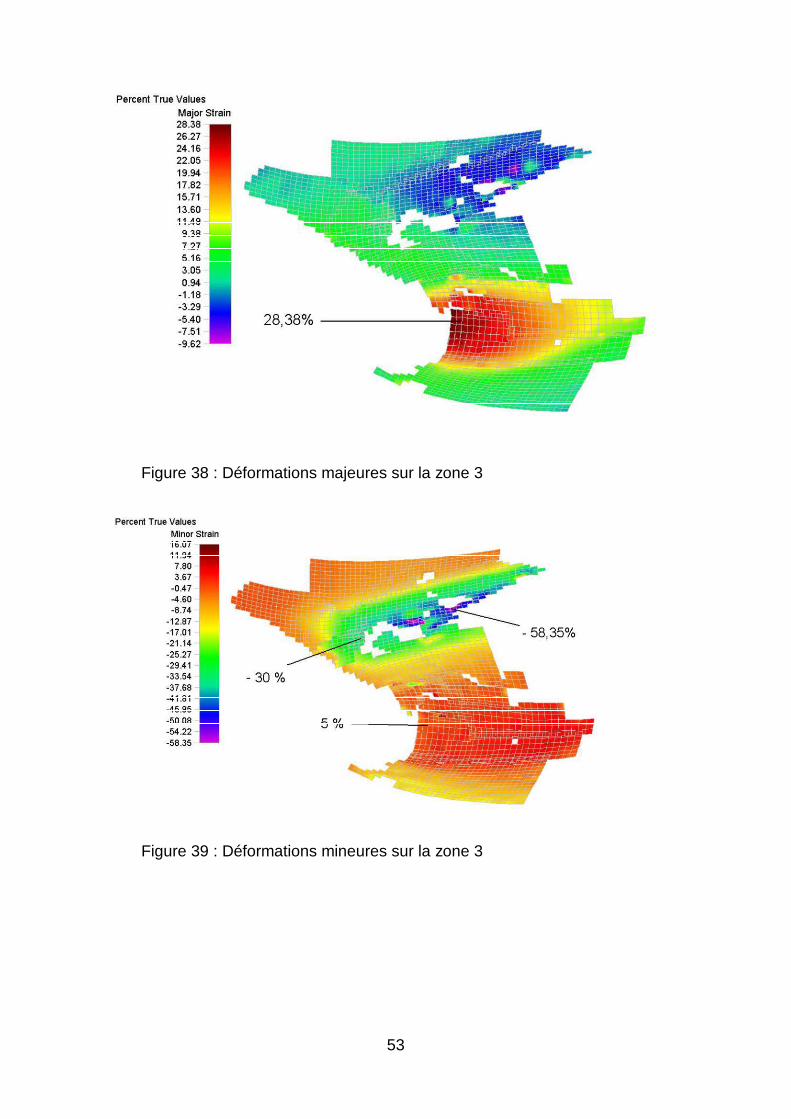
Les résultats sont visibles sur la Figure 38 pour le champ de déformations
majeures, et sur la Figure 39 pour le champ de déformations mineures.
Le maximum des déformations majeures se situe dans la zone d’intérêt 1 et
est de l’ordre de 30%. Le minimum des déformations majeures se situe dans la zone
d’intérêt 2, avec des valeurs de l’ordre de –5%.
Le minimum des déformations mineures se situe dans la zone d’intérêt 2. Les
zones où la peinture s’est écaillée se situent dans ce creux mais ne sont pas
gênantes pour l’analyse globale des déformations. On obtient des valeurs de l’ordre
de –55%, un peu plus pour certains points particuliers qui paraissent être des erreurs
de calcul d’ASAME. La zone sous le pli présente des déformations mineures de
l’ordre de 17%. Sur la zone d’intérêt 1, les déformations mineures sont homogènes
d’environ 5%.
53
Figure 38 : Déformations majeures sur la zone 3
Figure 39 : Déformations mineures sur la zone 3
54
Conclusion
Les résultats obtenus dans cette section en terme de champs de déformations
semblent être cohérents et logiques. La méthode de corrélation par stéréovision est
très bien adaptée pour la mesure des champs de grandes déformations sur ce type
de coque emboutie malgré la présence sur la structure étudiée de zones fortement
déformées et délicates d’analyse.
Cette étude a permis de mettre en évidence les limites de la méthode : des
temps de calcul relativement long et la nécessité de faire plusieurs mises en données
pour obtenir la totalité du champ de déformations sur une zone d’étude. Mais ces
longs temps de calcul sont à relativiser : sur l’ensemble des 3 zones d’intérêts, 14229
points de mesures ont été obtenus sur une structure déformée très complexe.
55
CONCLUSION
Après avoir fait leurs preuves dans les laboratoires de recherche, les
méthodes optiques connaissent un essor considérable dans le domaine industriel. La
corrélation d’images numériques est une méthode simple et efficace afin de mesurer
les déformations à la surface des matériaux. Elle permet d’étudier le comportement
d’un matériau pendant sa durée de vie, anticiper ses défaillances ou connaître son
mode de vieillissement sans risque de l’altérer. Il faut dire que la méthode ne
manque pas d’attrait. Elle offre tout d’abord une vision globale (en tout point) et sans
contact du champ de déformations à la surface de tout type de matériau. Les
mesures sont réalisables sur des pièces allant de quelques millimètres carrés à
plusieurs mètres carrés, ce qui explique que l’on utilise la corrélation d’images aussi
bien pour mesurer la déformation des dentures de micro-engrenages que pour
simuler l’effondrement d’un sol. Si la méthode est longtemps restée pénalisée par
des temps de calcul parfois longs, elle a su tirer parti des progrès de l’informatique.
Désormais, l’obtention d’un calcul de corrélation sur une image ne prend plus que
quelques secondes, et les dernières évolutions de logiciels autorisent même
l’observation des champs de déformations en temps réel, en les superposant aux
images de l’objet observé.
Etant donné l’intérêt de cette méthode il serait important de penser à sortir
cette technique des laboratoires universitaires, à la formaliser (normalisation) de
façon à permettre qu’elle soit plus accessible au milieu industriel pour la R&D
notamment.

56
57
REFERENCES BIBLIOGRAPHIQUES
[1] FRANÇOIS HILD. - Mesure de champs de déplacement par corrélation d’images
et applications en mécanique du solide : Notes de cours IPSI. - LMT Cachan
(septembre 2003) ; http://www.holo3.com/UserFiles/File/Publication1_FH.pdf
[2] Sciences de l’Ingénieur, Corrélation d'images numériques : algorithme de calcul,
[Enligne]. (Page consultée la 22 juillet 2011)
http://www.si.ens-cachan.fr/accueil_V2.php?page=affiche_ressource&id=37
[3] Jean-José ORTEU. - Mesure 3D de formes et de déformations par stéréovision. –
Technique de l’Ingénieur (BM 7 015)
[4] Patrice CLERC. - Mesure de champs de déplacements et de déformations par
stéréovision et corrélation d’images numériques : thèse. – Lyon : institut national des
sciences appliquées de Lyon, 2001
[5] Karen TRICONNET. - identification des propriétés mécaniques a partir de
mesures de champs dans un matériau multi-phase: thèse. – Paris : ENSAM Paris,
2007
[6] STEPHANE ROUX, FRANÇOIS HILD, JULIEN RETHORE. - La corrélation
d'images numériques en application : Science de l’ingénieur (Page consultée la 22
juillet 2011)
http://www.si.ens-cachan.fr/accueil_V2.php?page=affiche_ressource&id=131
[7] MESURES.COM. - Mesure de déformations : pensez à la corrélation d’images
numériques. - MESURES 810 - DÉCEMBRE 2008
http://www.mesures.com/archives/810_LDS_Correlation-image-numerique.pdf
[8] Wikipedia (Page consultée la 22 juillet 2011), Corrélation d'images, [Enligne].
http://fr.wikipedia.org/wiki/Corr%C3%A9lation_d'images

58
[9] TECHLAB. - Mesure de déformation 3D au service de la mécanique
expérimentale [Enligne]. (Page consultée la 22 juillet 2011)
http://www.techlab.fr/htm/vic.htm
[10] ARAMIS - Optical 3D Deformation Analysis ; [Enligne]. (Page consultée la 22 juillet 2011) ; http://www.gom.com/metrology-systems/digital-image-correlation.html
Recommended

















