Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 1
1997 Založena firma u-blox AG1998 První modul GPS na světě pro plošnou montáž2001 Populární 1“ formát TIM 2002 Čipová sada Antaris ve spolupráci s firmou Atmel2003 Moduly TIM-LX s čipovou sadou Antaris2004 Navigace s vysokou citlivostí SuperSense2005 Moduly GPS SuperSense
Nový formát LEA s rozměry 22x17mm2006 Představen systém A-GPS on-line
Nový formát NEO s rozměry 12,2x16mm2007 50kanálová čipová sada u-blox5 s citlivostí -160dBm a spotřebou 50mW
Představen systém A-GPS off-line2008 Nejmenší modul na světě AMY s rozměry 6,5x8x1,2mm
Uvedeny na trh moduly LEA a NEO s čipovou sadou u-blox 52009 Nová čipová sada u-blox 6 zlepšuje start a snižuje spotřebu
Převzetí firmy Neonseven umožňuje vstup na trh GSMPředstaven a uveden na trh modul GSM LEON
2010 Uvedeny na trh moduly s čipovou sadou u-blox 6Představen a uveden na trh modul 3G LUCYPředstaven modul GSM s podporou in-band (eCall)U-blox získává patent na úspornou real-time GPS
Historie firmy u-bloxHistorie firmy u-blox
Přehled modulů GPS – doporučené typyPřehled modulů GPS – doporučené typy
Všechny moduly● Citlivost -160dBm● Integrovaný LNA pro pasivní anténu● A-GPS on-line a off-line● SBAS (EGNOS, WAAS...)● UART, DDC (I2C), USB
NEO● Kompaktní modul 12,2×16×2,4mm● ROM; konfigurace v BBR (RAM)
nebo v externí FLASH● KickStart (rychlý start)
• NEO-6Q 2,7 – 3,6V• NEO-6G 1,75 – 2,0V
● Standardní start• NEO-6M 2,7 – 3,6V
LEA● Univerzální modul 17×22×2,4mm● Napájení 2,7 až 3,6V● Podpora aktivní antény
• Ochrana proti zkratu• Indikace odpojení (externě)• Power management
● KickStart• LEA-6S (ROM, konfigurace v BBR)• LEA-6H (FLASH)
• Paměť pro A-GPS off-line (a konfiguraci)• Aktualizace FW → Galileo
● Standardní start• LEA-6A (ROM, konfigurace v BBR)
● Speciální aplikace• LEA-6T
• Timing• Data RAW
• LEA-6R• Inerciální navigace
NEO-6x LEA-6x
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 2
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 3
Přehled modulů GPS – další typyPřehled modulů GPS – další typy
Všechny moduly● Citlivost -160dBm● Integrovaný LNA pro pasivní anténu● A-GPS on-line a off-line● SBAS (EGNOS, WAAS...)● u-blox 5
AMY- 6M● Miniaturní modul 6,5×8×1,2mm LGA50● 1,75 až 2,0V & 2,7 až 3,6V● ROM; konfigurace v BBR (RAM)
nebo v externí FLASH● UART, DDC (I2C), USB● Vyšší náročnost integrace● Mobilní aplikace ve velkých sériích
TIM- 5H● Zpětná kompatibilita s 1“ moduly● Napájení 2,7 až 3,6V● 2x UART● Podpora aktivní antény
• Ochrana proti zkratu• Indikace odpojení (externě)• Power management
● KickStart● Nevhodný pro nové aplikace → LEA-6H
AMY
TIM
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 4
Přehled modulů GPSPřehled modulů GPS
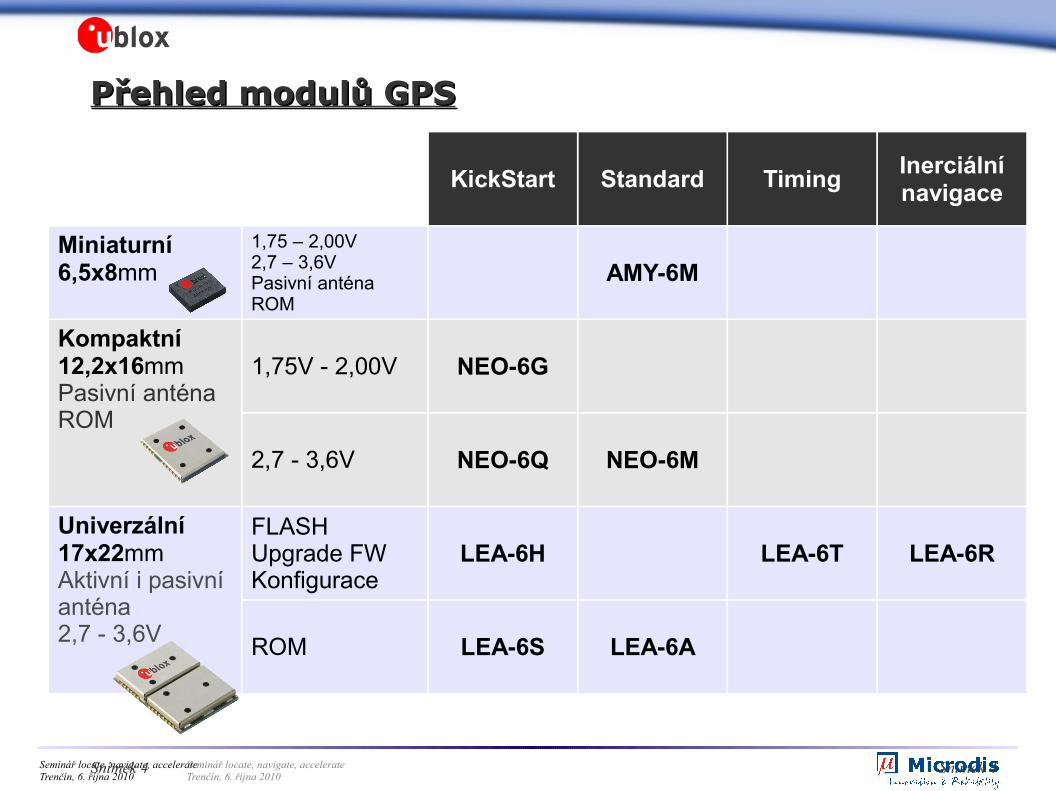
KickStart Standard Timing Inerciální navigace
Miniaturní6,5x8mm
1,75 – 2,00V2,7 – 3,6VPasivní anténaROM
AMY-6M
Kompaktní12,2x16mmPasivní anténaROM
1,75V - 2,00V NEO-6G
2,7 - 3,6V NEO-6Q NEO-6M
Univerzální17x22mmAktivní i pasivní anténa2,7 - 3,6V
FLASHUpgrade FWKonfigurace
LEA-6H LEA-6T LEA-6R
ROM LEA-6S LEA-6A
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 4
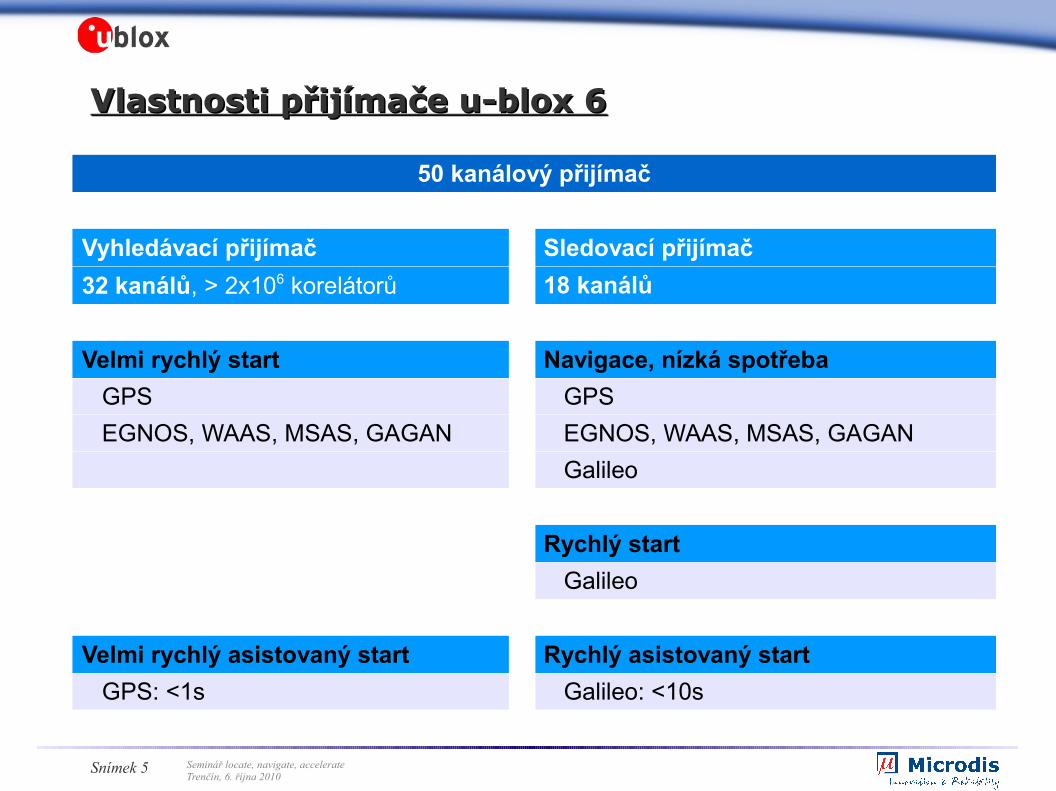
Vlastnosti přijímače u-blox 6Vlastnosti přijímače u-blox 6
50 kanálový přijímač
Vyhledávací přijímač Sledovací přijímač32 kanálů, > 2x106 korelátorů 18 kanálů
Velmi rychlý start Navigace, nízká spotřeba GPS GPS EGNOS, WAAS, MSAS, GAGAN EGNOS, WAAS, MSAS, GAGAN
Galileo
Rychlý start Galileo
Velmi rychlý asistovaný start Rychlý asistovaný start GPS: <1s Galileo: <10s
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 5
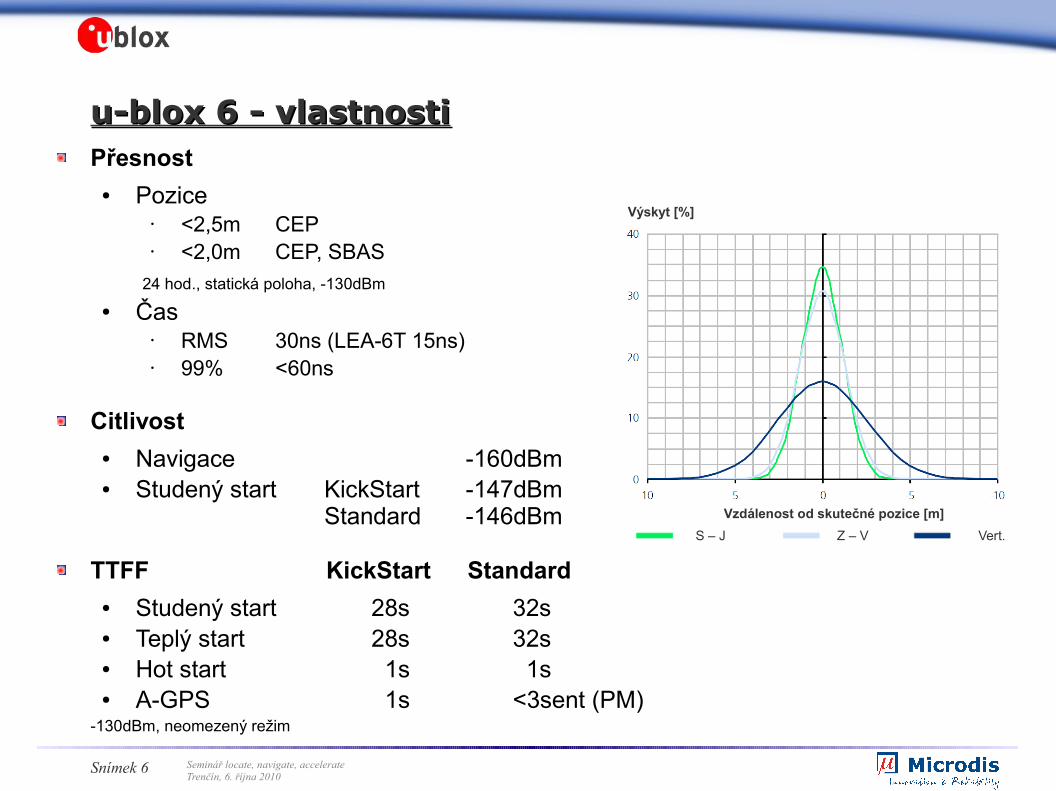
u-blox 6 - vlastnostiu-blox 6 - vlastnostiPřesnost
● Pozice• <2,5m CEP• <2,0m CEP, SBAS
24 hod., statická poloha, -130dBm● Čas
• RMS 30ns (LEA-6T 15ns)• 99% <60ns
Citlivost● Navigace -160dBm● Studený start KickStart -147dBm
Standard -146dBm
TTFF KickStart Standard● Studený start 28s 32s● Teplý start 28s 32s● Hot start 1s 1s● A-GPS 1s <3sent (PM)
-130dBm, neomezený režim
S – J Z – V Vert.
Výskyt [%]
Vzdálenost od skutečné pozice [m]
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 6
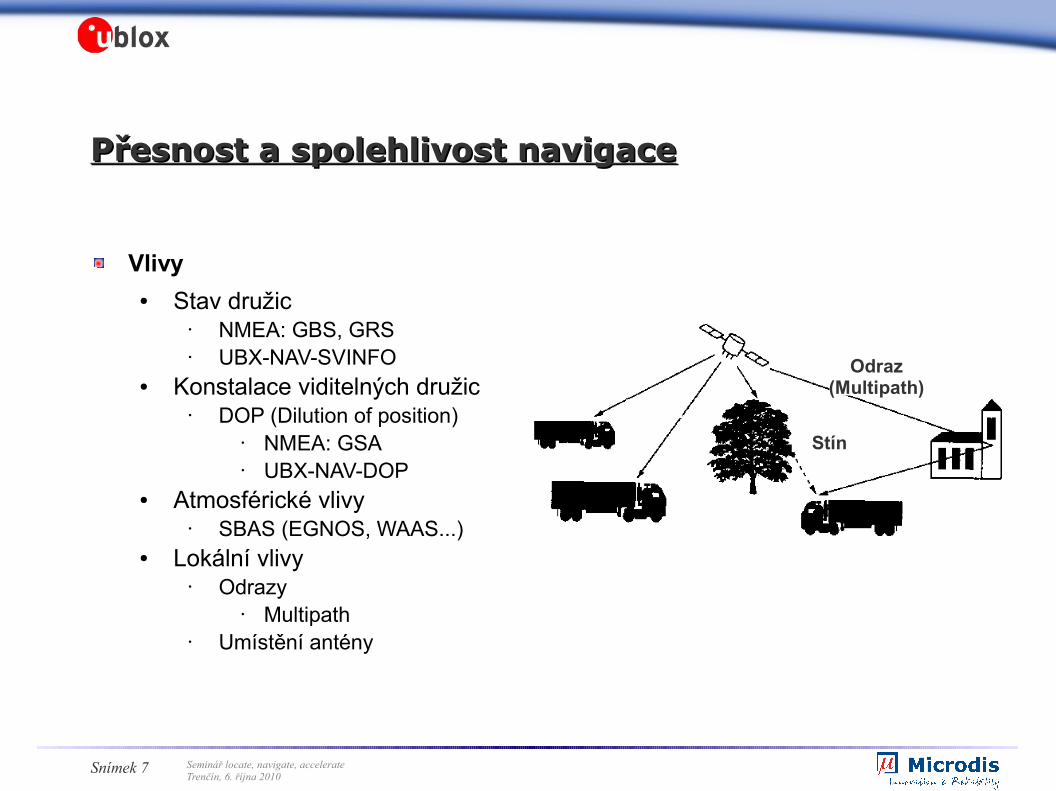
Přesnost a spolehlivost navigacePřesnost a spolehlivost navigace
Vlivy● Stav družic
• NMEA: GBS, GRS• UBX-NAV-SVINFO
● Konstalace viditelných družic• DOP (Dilution of position)
• NMEA: GSA• UBX-NAV-DOP
● Atmosférické vlivy• SBAS (EGNOS, WAAS...)
● Lokální vlivy• Odrazy
• Multipath• Umístění antény
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 7
Stín
Odraz(Multipath)
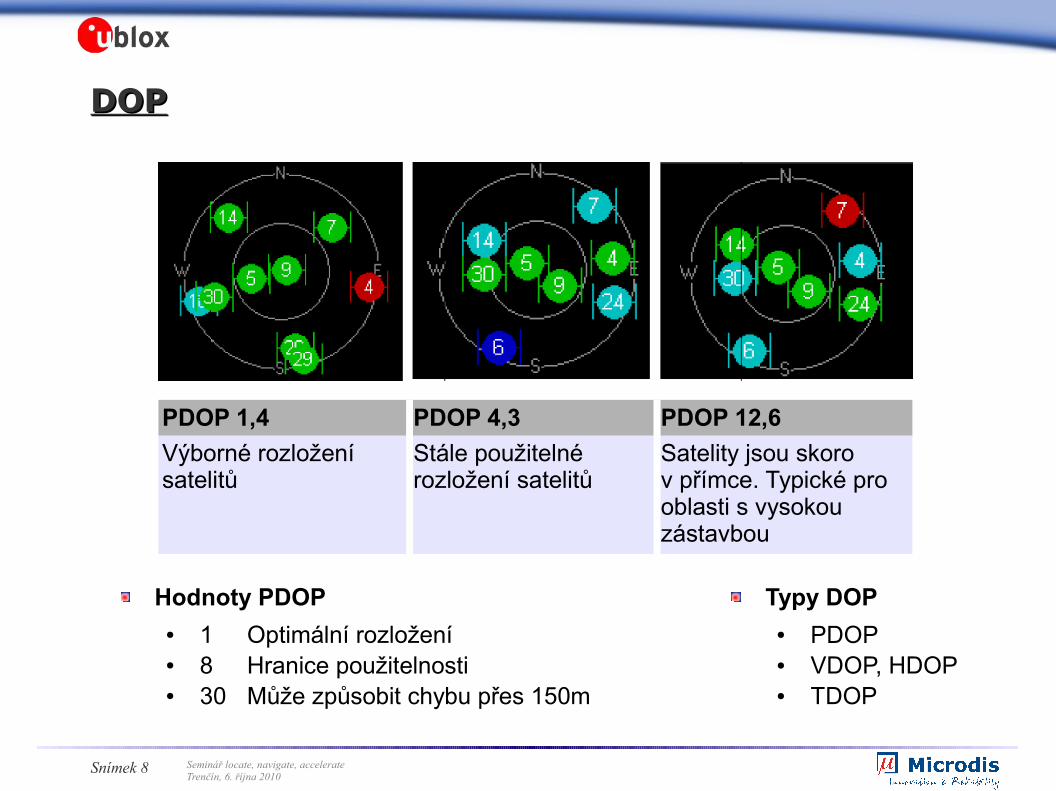
DOPDOP
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 8
PDOP 1,4 PDOP 4,3 PDOP 12,6Výborné rozložení satelitů
Stále použitelné rozložení satelitů
Satelity jsou skoro v přímce. Typické pro oblasti s vysokou zástavbou
Hodnoty PDOP● 1 Optimální rozložení● 8 Hranice použitelnosti● 30 Může způsobit chybu přes 150m
Typy DOP● PDOP● VDOP, HDOP● TDOP
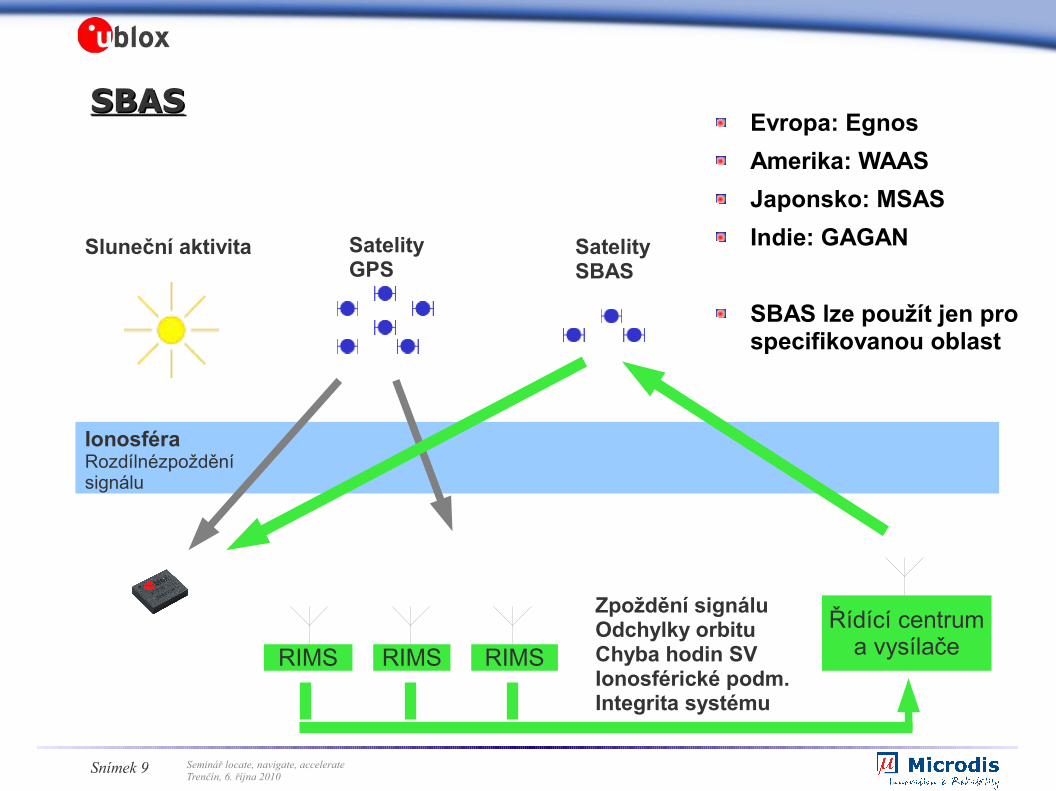
SBASSBAS
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 9
IonosféraRozdílnézpožděnísignálu
RIMSRIMSRIMSŘídící centrum
a vysílače
Zpoždění signáluOdchylky orbituChyba hodin SVIonosférické podm.Integrita systému
SatelityGPS
SatelitySBAS
Sluneční aktivita
Evropa: EgnosAmerika: WAASJaponsko: MSASIndie: GAGAN
SBAS lze použít jen pro specifikovanou oblast
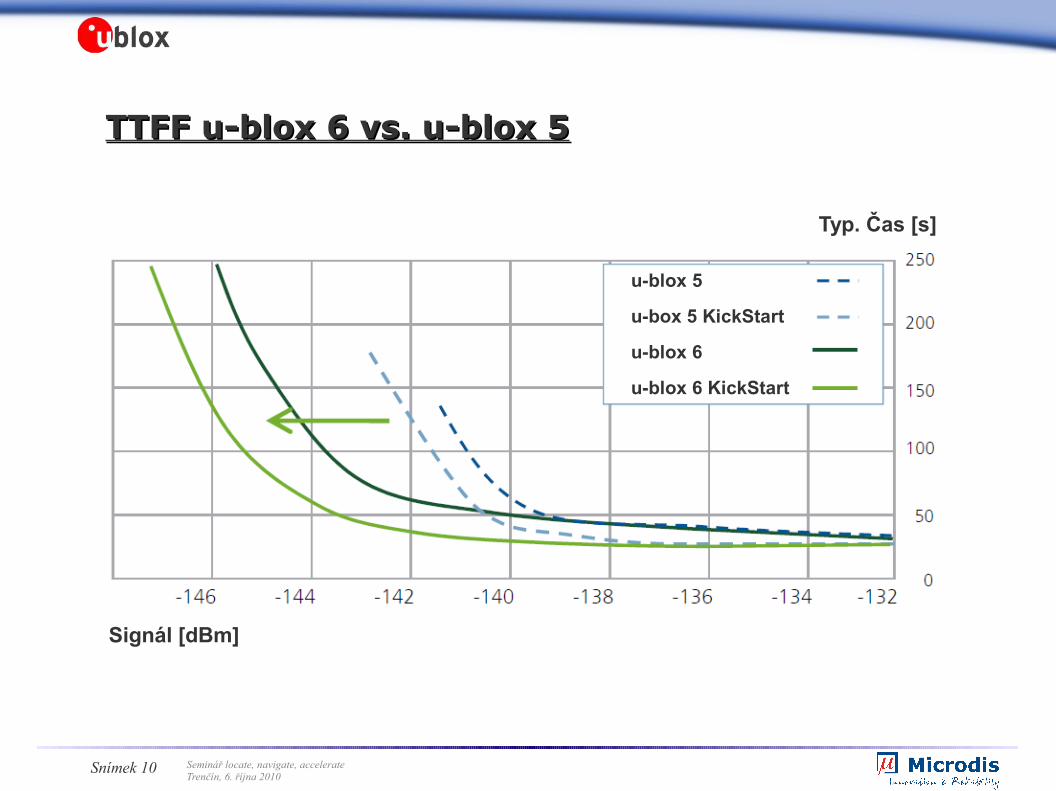
TTFF u-blox 6 vs. u-blox 5TTFF u-blox 6 vs. u-blox 5
u-blox 5
u-box 5 KickStart
u-blox 6
u-blox 6 KickStart
Signál [dBm]
Typ. Čas [s]
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 10
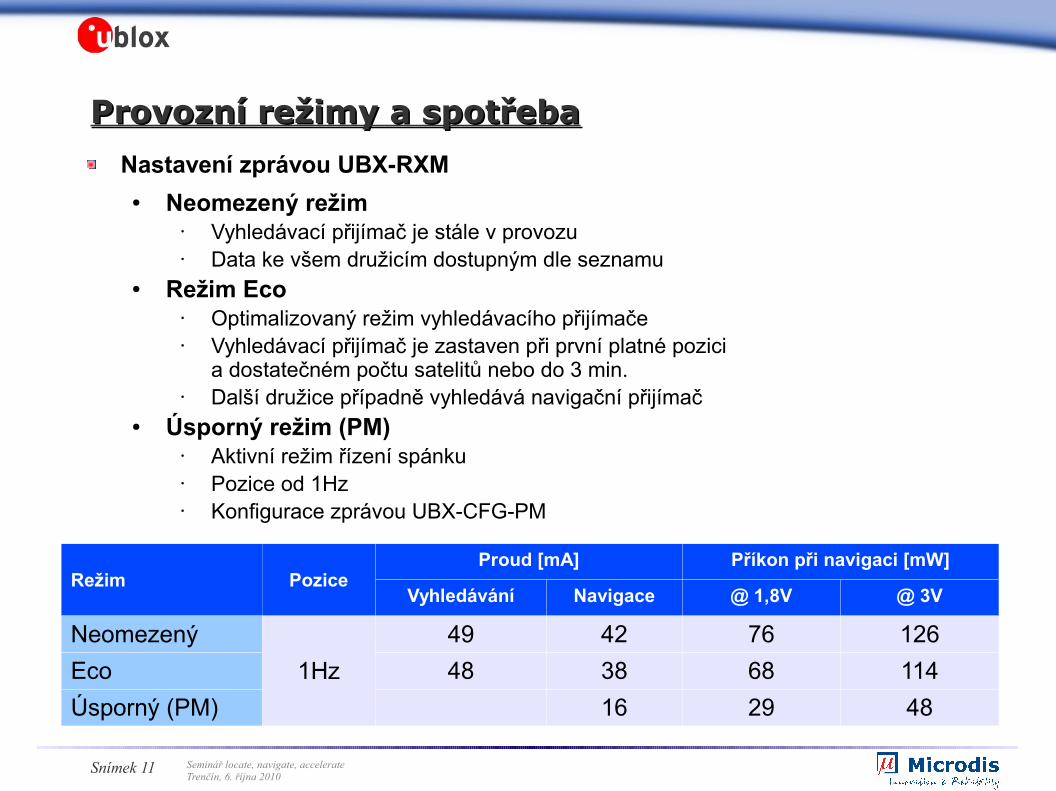
Provozní režimy a spotřebaProvozní režimy a spotřeba
Nastavení zprávou UBX-RXM● Neomezený režim
• Vyhledávací přijímač je stále v provozu• Data ke všem družicím dostupným dle seznamu
● Režim Eco• Optimalizovaný režim vyhledávacího přijímače• Vyhledávací přijímač je zastaven při první platné pozici
a dostatečném počtu satelitů nebo do 3 min.• Další družice případně vyhledává navigační přijímač
● Úsporný režim (PM)• Aktivní režim řízení spánku• Pozice od 1Hz• Konfigurace zprávou UBX-CFG-PM
Režim PoziceProud [mA] Příkon při navigaci [mW]
Vyhledávání Navigace @ 1,8V @ 3V
Neomezený1Hz
49 42 76 126Eco 48 38 68 114Úsporný (PM) 16 29 48
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 11
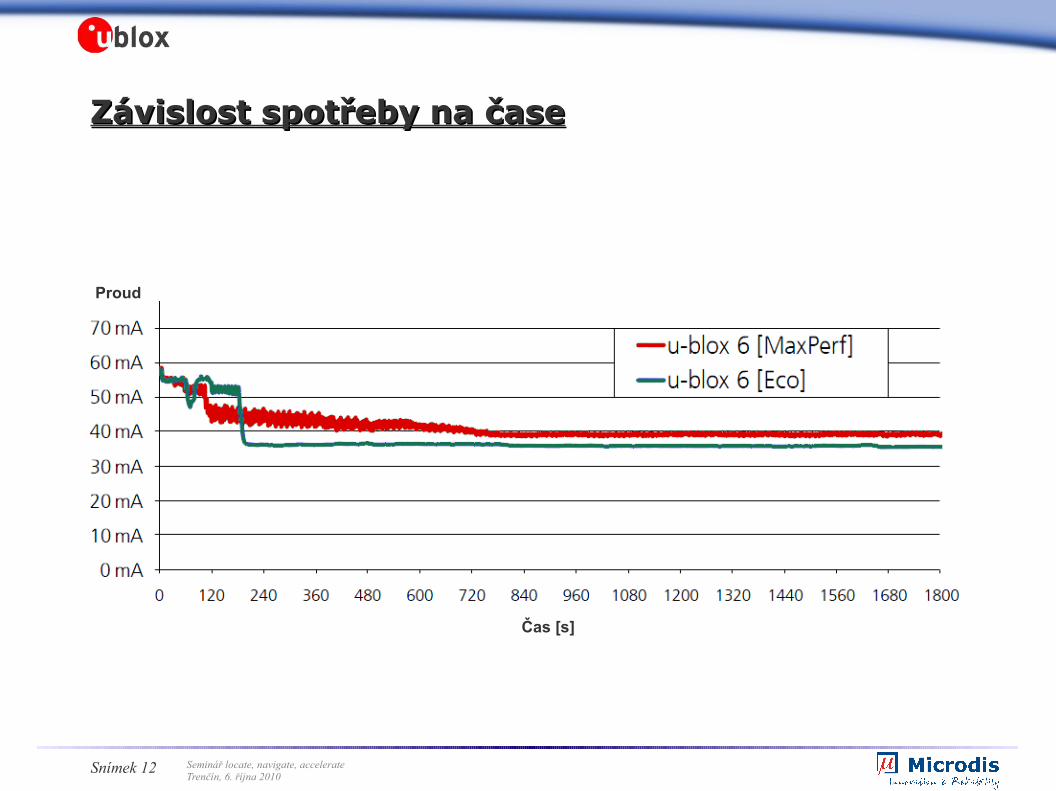
Závislost spotřeby na časeZávislost spotřeby na čase
Čas [s]
Proud
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 12
Úsporný režim PMÚsporný režim PM
Redukce průměrné spotřeby během navigace● Periodické vypínání částí nebo celého přijímače
• Doba navigace• Doba vyhledávání satelitů
● Periodické probouzení• Konfigurovatelné od 1s do 12 dnů• Přerušení (EXT_INT0, 1)• UART (UBX-RXM-POSREQ)
● Automatická aktualizace času a navigačních dat
Omezení proudových špiček při vyhledávání satelitů● Nezávisle na nastavení ostatních parametrů● Vhodné pro bateriový provoz● Delší TTFF
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 13
Konfigurace UBX-CFG-PMKonfigurace UBX-CFG-PM
Update Period● Interval aktualizace pozice
Search Period● Interval získání pozice
Gird Period Offset● Posun pro absolutní určení startu● Vztaženo k začátku týdne času GPS (TOW)
On Time● Délka provozu od první pozice
Acq. Timeout● Max. doba pokusu o nalezení satelitů
Aktuální navigační data● Update RTC● Update EPH
Nastavení probouzení pinem EXTINT● EXTINT Selection, EXTINT Forces ON/OFF
Redukce proudových špiček
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 14
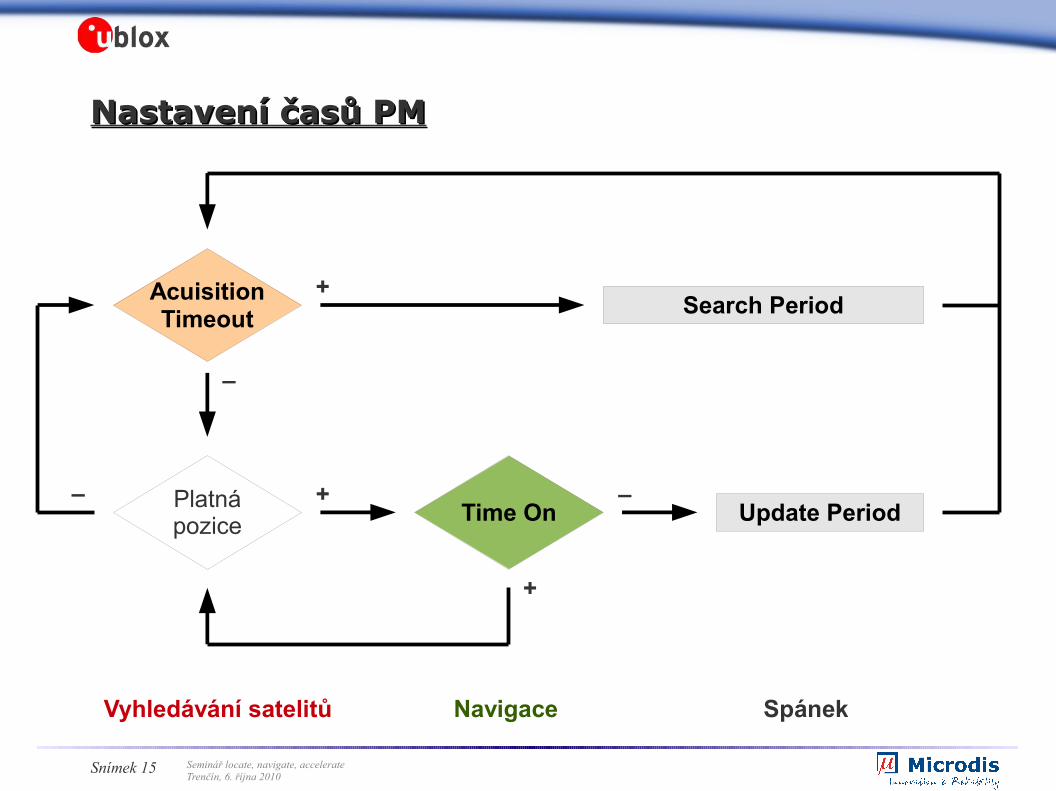
Nastavení časů PMNastavení časů PM
AcuisitionTimeout
Platnápozice Time On
Search Period
Update Period– –
–
+
+
+
Vyhledávání satelitů Navigace Spánek
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 15
Spotřeba v režimu PMSpotřeba v režimu PM
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 16
10
1
0,1
[mA]
1s 1min. 1hod. 1denIntervalaktualizace
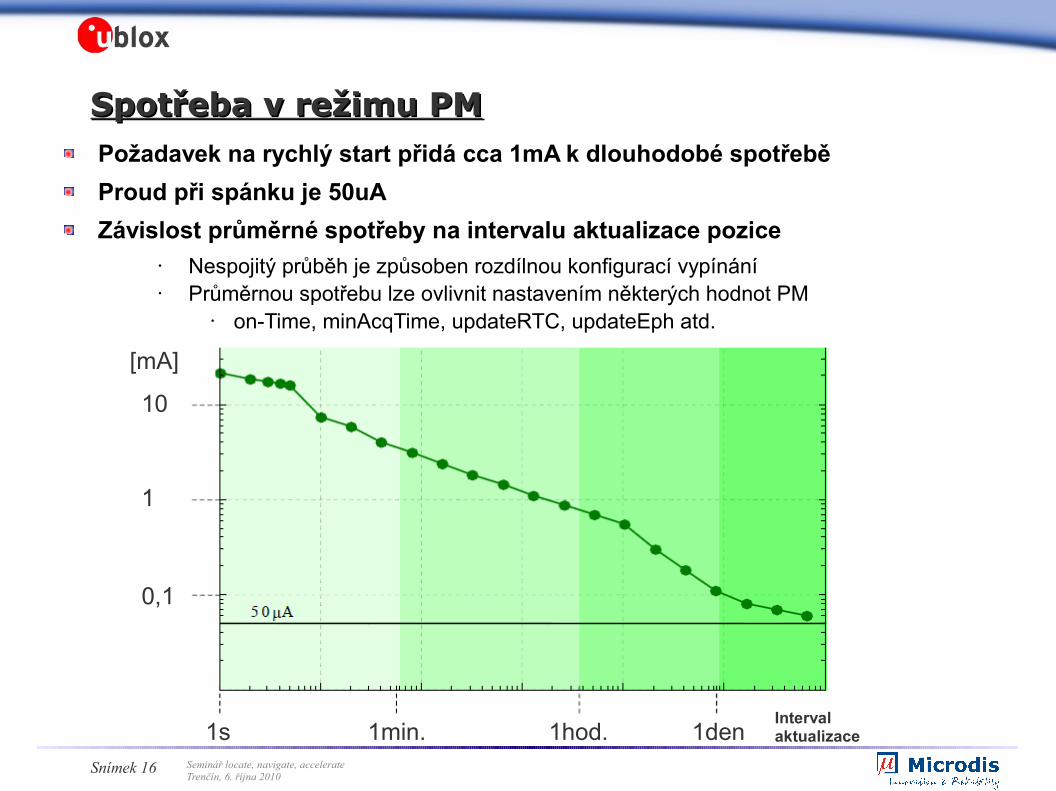
Požadavek na rychlý start přidá cca 1mA k dlouhodobé spotřeběProud při spánku je 50uAZávislost průměrné spotřeby na intervalu aktualizace pozice
• Nespojitý průběh je způsoben rozdílnou konfigurací vypínání• Průměrnou spotřebu lze ovlivnit nastavením některých hodnot PM
• on-Time, minAcqTime, updateRTC, updateEph atd.

Navigační dataNavigační data
Ephemeris● Pouze vlastní data● Platnost až 4 hodiny● Interval zveřejnění nových dat 1/hod.● Přesnost polohy satelitu cca 2m● Doba získání 18s
Almanac● Data pro všechny družice● Platnost několik týdnů● Interval zveřejnění nových dat 1/den● Přesnost polohy satelitu cca 3km● Dobá získání 6s / 750s
Požadavky na signál● Vyhledání družic a získání dat >30dBhz● Sledování družic (navigace) od 12dBHz
Čas Eph Eph Stat Alm
18s30s
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 17
Reset● Cold
• Smazány Eph, Alm, čas
● Warm• Smazán Eph• Zůstává Alm, čas
● Hot• Zůstává Eph, Alm, čas
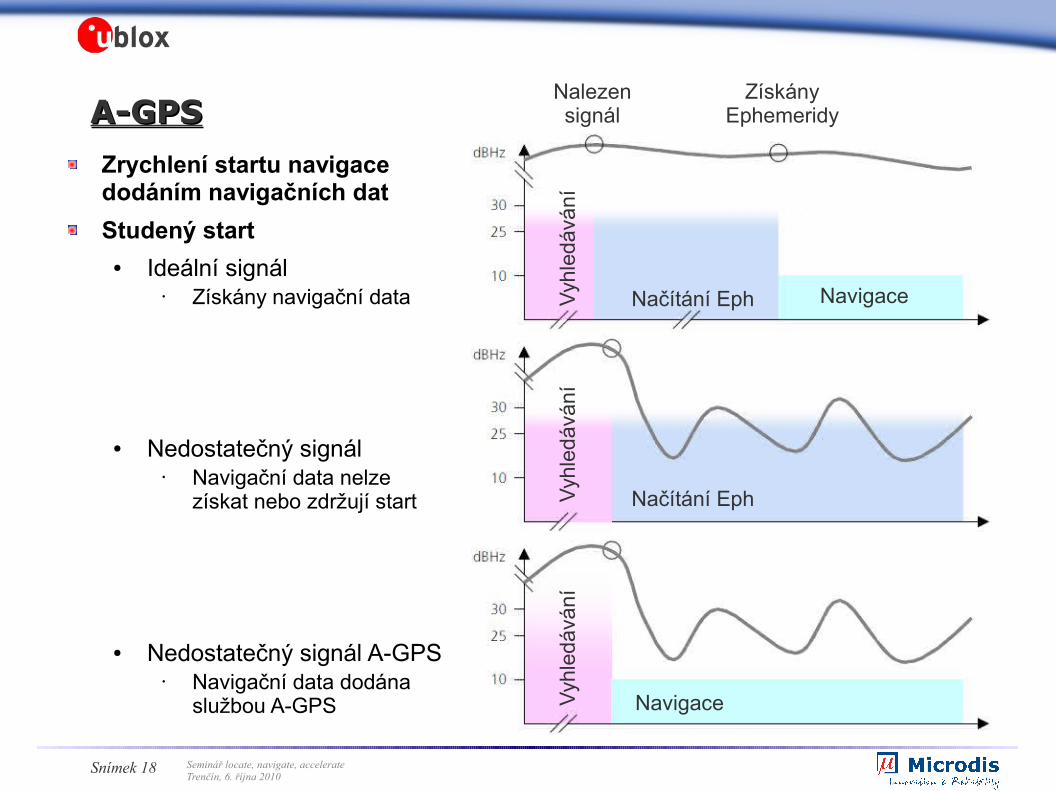
A-GPSA-GPS
Zrychlení startu navigace dodáním navigačních datStudený start
● Ideální signál• Získány navigační data
● Nedostatečný signál• Navigační data nelze
získat nebo zdržují start
● Nedostatečný signál A-GPS• Navigační data dodána
službou A-GPS
Nalezensignál
ZískányEphemeridy
Vyhl
edáv
ání
Vyhl
edáv
ání
Vyhl
edáv
ání
Načítání Eph
Načítání Eph
Navigace
Navigace
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 18
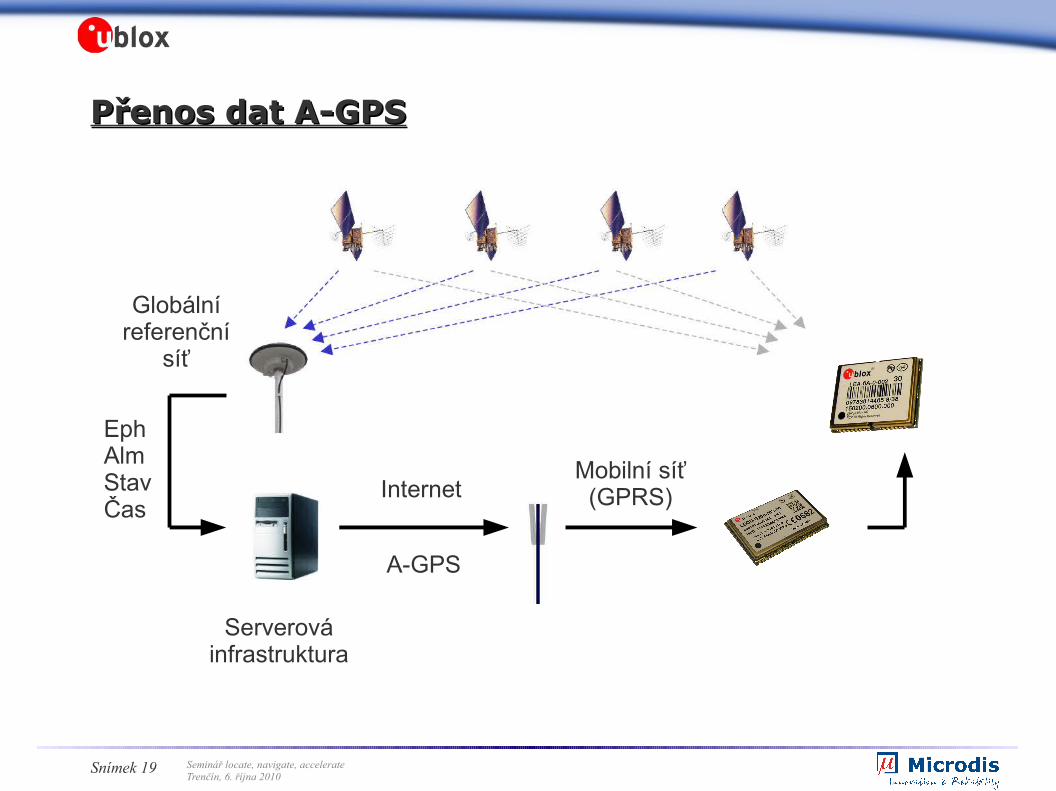
Přenos dat A-GPSPřenos dat A-GPS
Globálníreferenční
síť
Serverováinfrastruktura
EphAlmStavČas
Internet
A-GPS
Mobilní síť(GPRS)
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 19
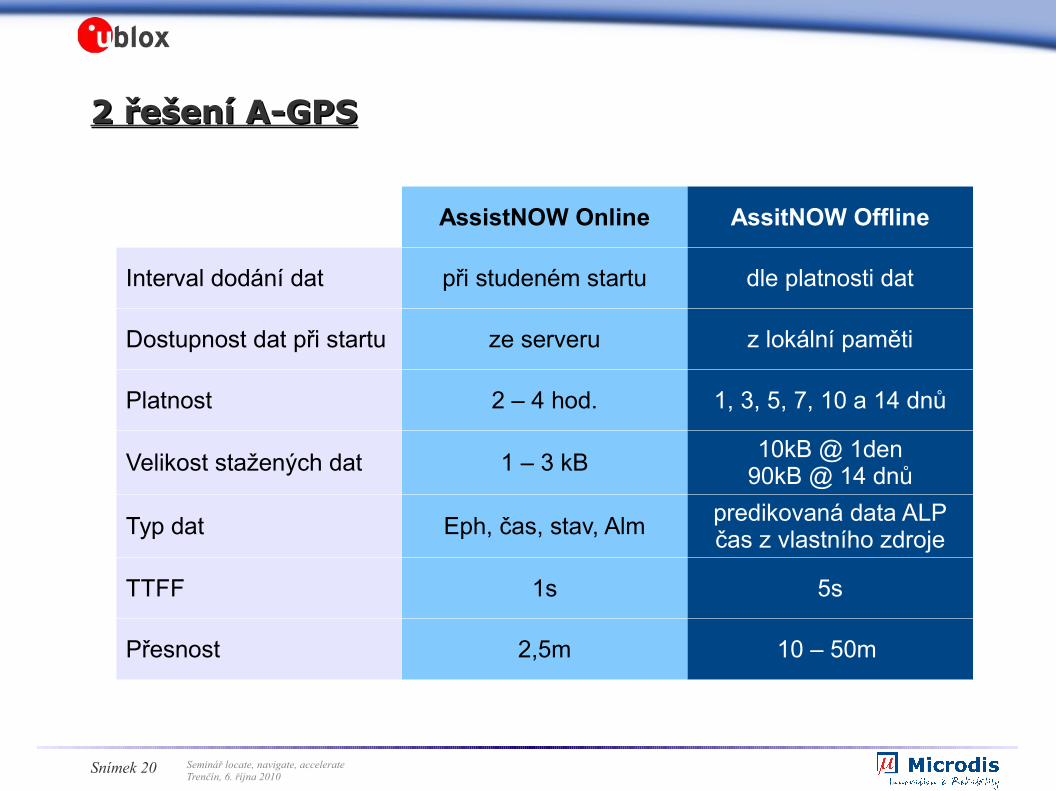
2 řešení A-GPS2 řešení A-GPS
AssistNOW Online AssitNOW Offline
Interval dodání dat při studeném startu dle platnosti dat
Dostupnost dat při startu ze serveru z lokální paměti
Platnost 2 – 4 hod. 1, 3, 5, 7, 10 a 14 dnů
Velikost stažených dat 1 – 3 kB 10kB @ 1den90kB @ 14 dnů
Typ dat Eph, čas, stav, Alm predikovaná data ALPčas z vlastního zdroje
TTFF 1s 5s
Přesnost 2,5m 10 – 50m
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 20
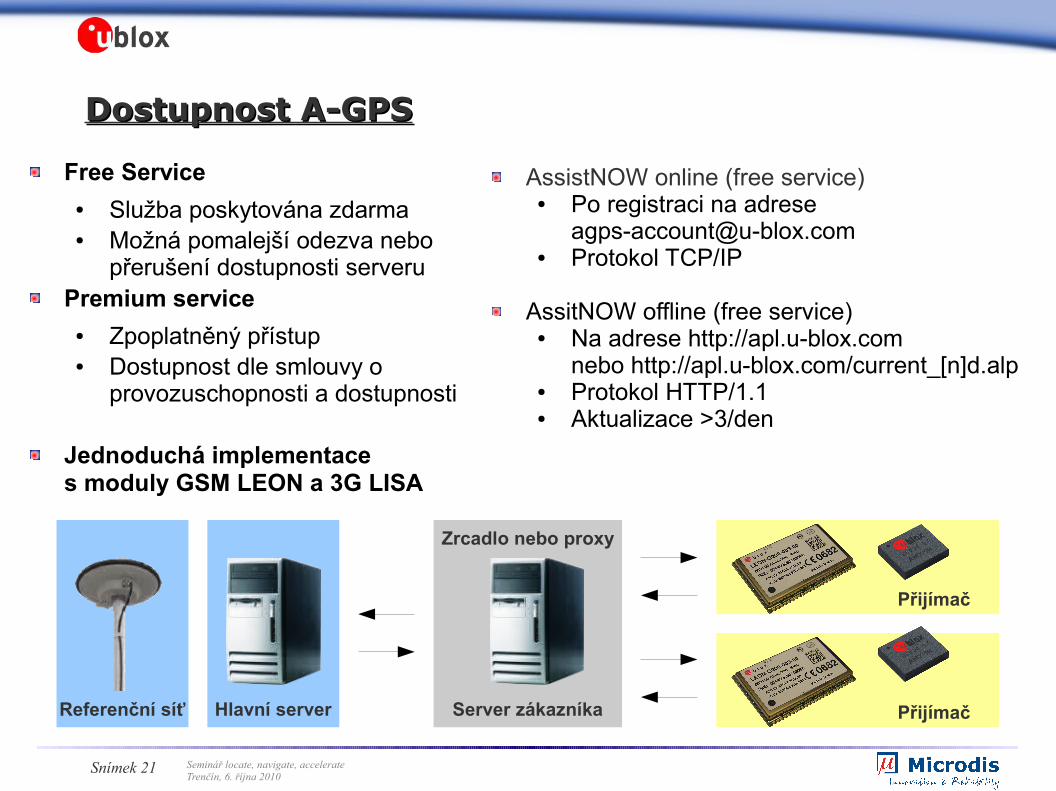
Dostupnost A-GPSDostupnost A-GPS
Free Service● Služba poskytována zdarma● Možná pomalejší odezva nebo
přerušení dostupnosti serveruPremium service
● Zpoplatněný přístup● Dostupnost dle smlouvy o
provozuschopnosti a dostupnosti
Jednoduchá implementaces moduly GSM LEON a 3G LISA
Referenční síť
AssistNOW online (free service)● Po registraci na adrese
[email protected]● Protokol TCP/IP
AssitNOW offline (free service)● Na adrese http://apl.u-blox.com
nebo http://apl.u-blox.com/current_[n]d.alp● Protokol HTTP/1.1● Aktualizace >3/den
Hlavní server
Zrcadlo nebo proxy
Server zákazníka
Přijímač
Přijímač
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 21
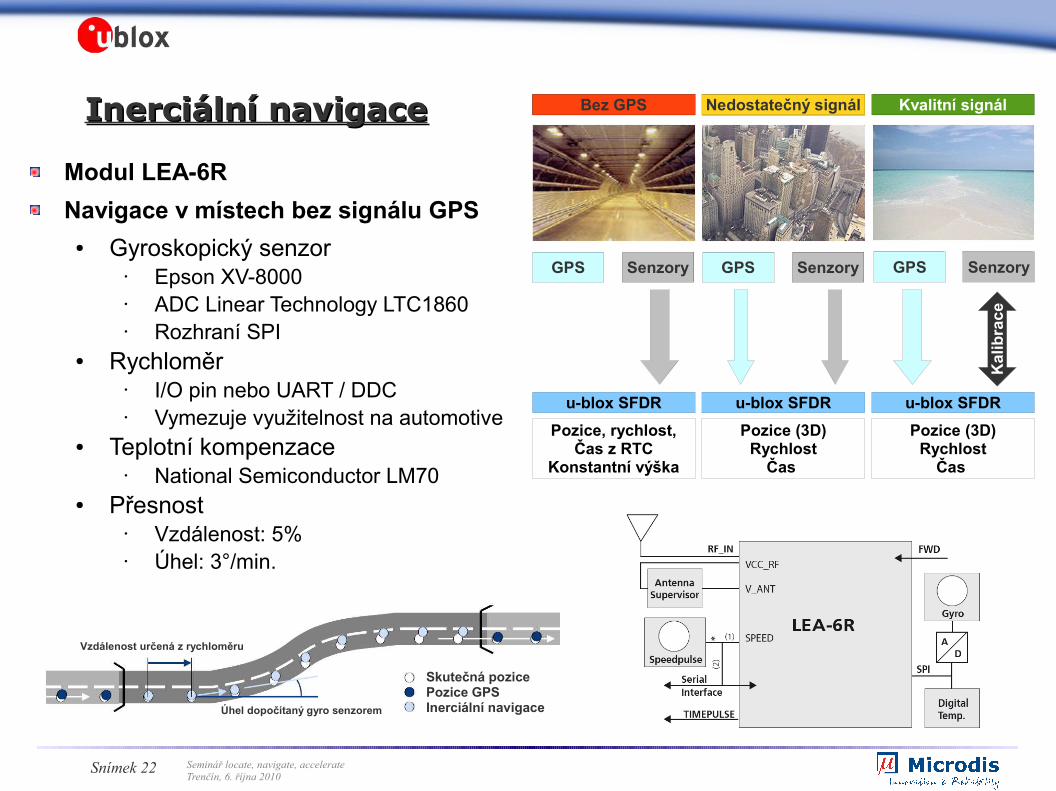
Inerciální navigaceInerciální navigace
Modul LEA-6RNavigace v místech bez signálu GPS
● Gyroskopický senzor • Epson XV-8000• ADC Linear Technology LTC1860• Rozhraní SPI
● Rychloměr• I/O pin nebo UART / DDC• Vymezuje využitelnost na automotive
● Teplotní kompenzace• National Semiconductor LM70
● Přesnost• Vzdálenost: 5%• Úhel: 3°/min.
Bez GPS Nedostatečný signál Kvalitní signál
GPS Senzory GPS Senzory GPS Senzory
u-blox SFDR u-blox SFDR u-blox SFDRPozice, rychlost,
Čas z RTCKonstantní výška
Pozice (3D)Rychlost
Čas
Pozice (3D)Rychlost
Čas
Kal
ibra
ce
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 22
Skutečná pozicePozice GPSInerciální navigaceÚhel dopočítaný gyro senzorem
Vzdálenost určená z rychloměru
LEA-6TLEA-6T
Přesný čas● RMS 30ns● 99% <60ns● Kompenzovaný 15ns
• Informaci o chybě lze použít ke kompenzaci chyby vztažené k rozlišení
● Rozlišení 21ns
2 pulzní výstupy● Konfigurovatelné do 10MHz
Čas již s jedním satelitem5 pozic/sData RAW
● Výrobně nastavený dynamický model: Stationary• Max. rychlost 10m/s
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 23
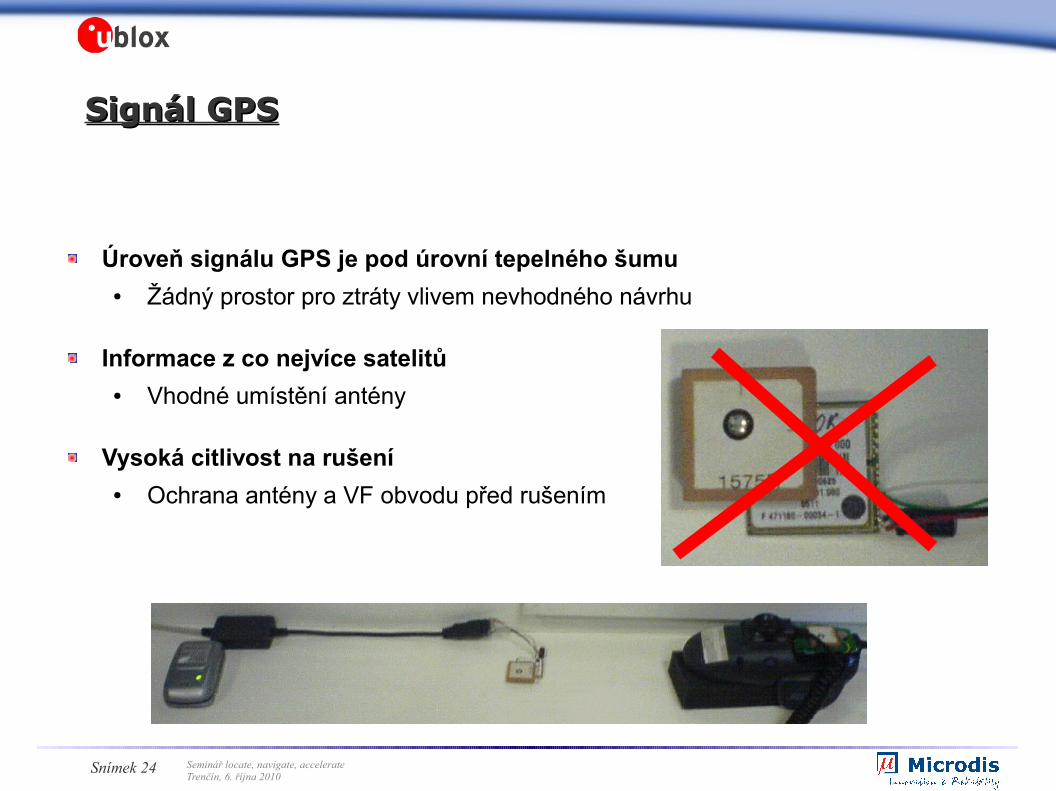
Signál GPSSignál GPS
Úroveň signálu GPS je pod úrovní tepelného šumu● Žádný prostor pro ztráty vlivem nevhodného návrhu
Informace z co nejvíce satelitů● Vhodné umístění antény
Vysoká citlivost na rušení● Ochrana antény a VF obvodu před rušením
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 24
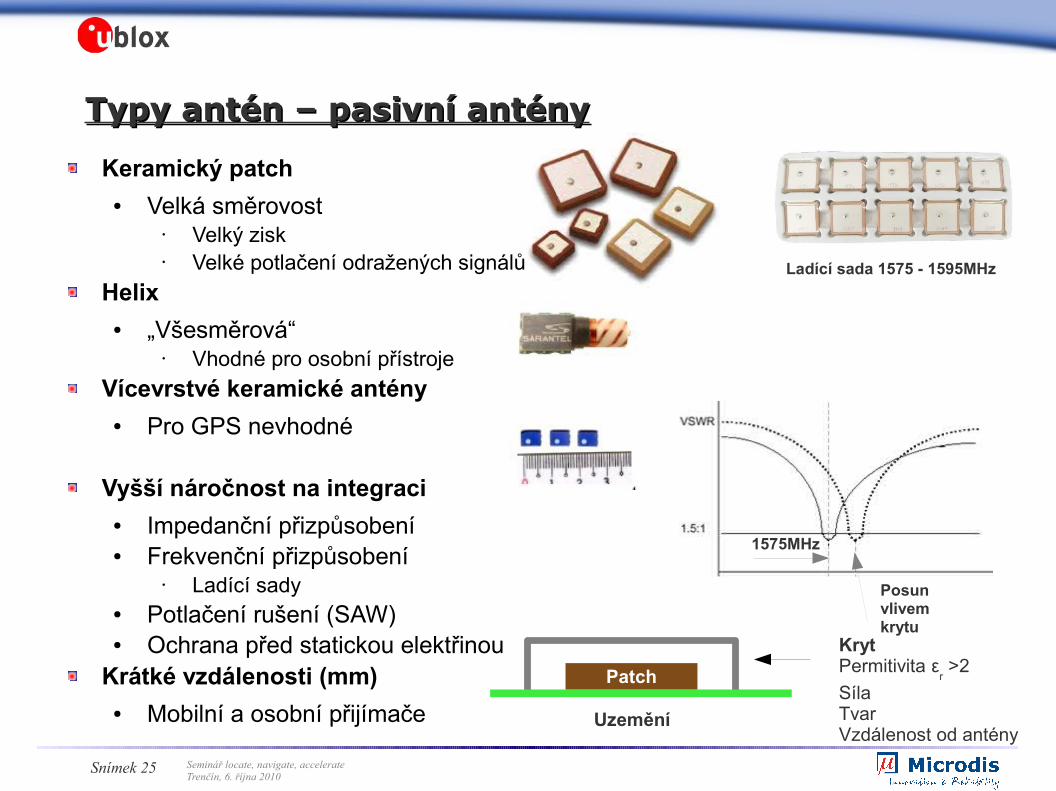
Typy antén – pasivní antényTypy antén – pasivní antény
Keramický patch● Velká směrovost
• Velký zisk• Velké potlačení odražených signálů
Helix● „Všesměrová“
• Vhodné pro osobní přístrojeVícevrstvé keramické antény
● Pro GPS nevhodné
Vyšší náročnost na integraci● Impedanční přizpůsobení● Frekvenční přizpůsobení
• Ladící sady● Potlačení rušení (SAW)● Ochrana před statickou elektřinou
Krátké vzdálenosti (mm)● Mobilní a osobní přijímače
1575MHz
Posun vlivemkrytu
PatchKrytPermitivita ε
r >2
SílaTvarVzdálenost od antény
Uzemění
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 25
Ladící sada 1575 - 1595MHz
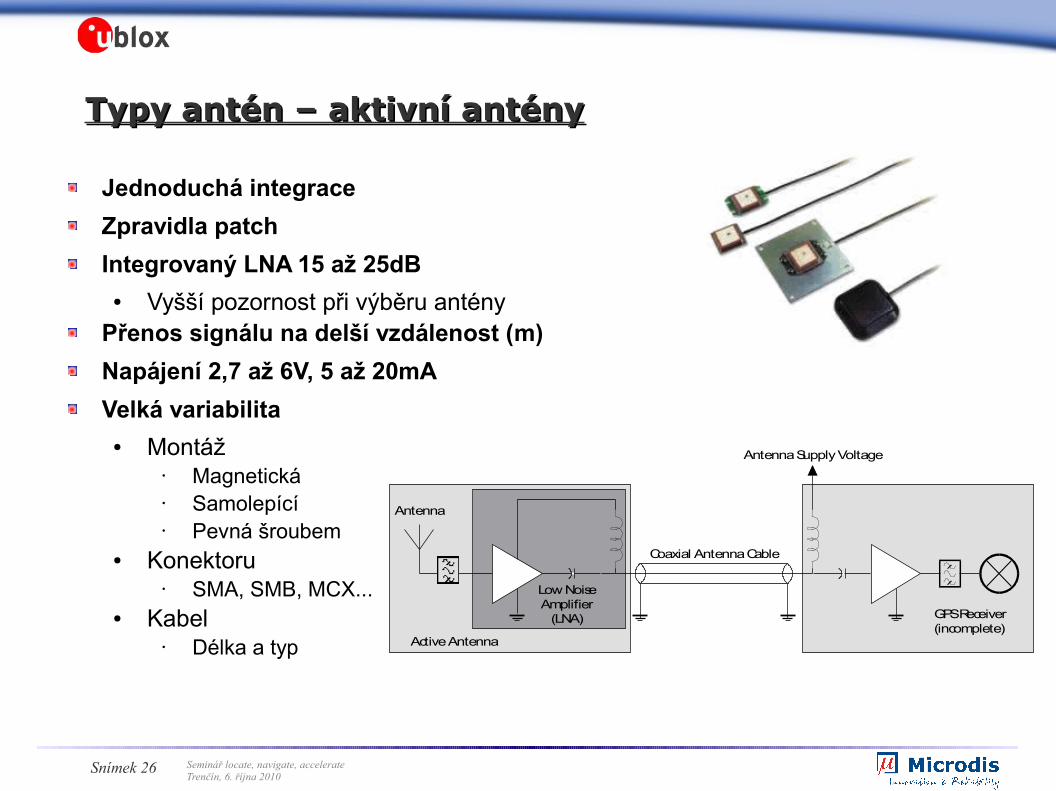
Typy antén – aktivní antényTypy antén – aktivní antény
Jednoduchá integraceZpravidla patchIntegrovaný LNA 15 až 25dB
● Vyšší pozornost při výběru antényPřenos signálu na delší vzdálenost (m)Napájení 2,7 až 6V, 5 až 20mAVelká variabilita
● Montáž• Magnetická• Samolepící• Pevná šroubem
● Konektoru• SMA, SMB, MCX...
● Kabel• Délka a typ
Antenna
Low NoiseAmplifier
(LNA)
Coaxial Antenna Cable
Antenna Supply Voltage
GPS Receiver(incomplete)
Active Antenna
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 26
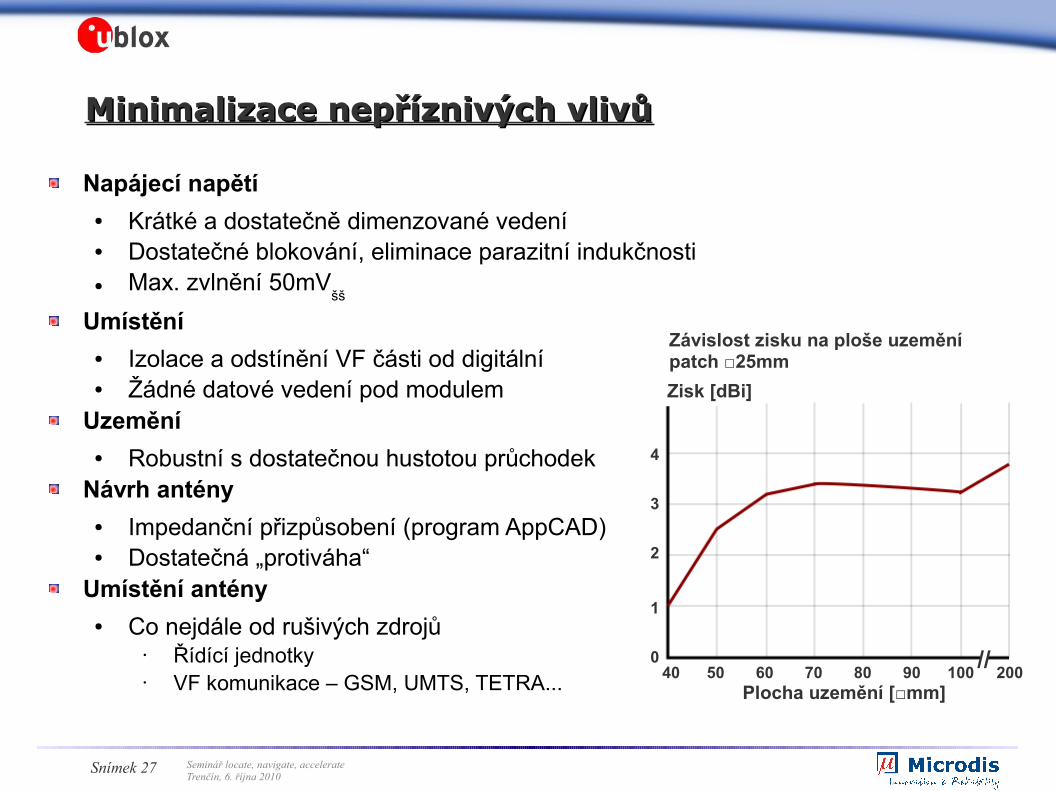
Minimalizace nepříznivých vlivůMinimalizace nepříznivých vlivů
Napájecí napětí● Krátké a dostatečně dimenzované vedení● Dostatečné blokování, eliminace parazitní indukčnosti● Max. zvlnění 50mV
šš
Umístění● Izolace a odstínění VF části od digitální● Žádné datové vedení pod modulem
Uzemění● Robustní s dostatečnou hustotou průchodek
Návrh antény● Impedanční přizpůsobení (program AppCAD)● Dostatečná „protiváha“
Umístění antény● Co nejdále od rušivých zdrojů
• Řídící jednotky• VF komunikace – GSM, UMTS, TETRA... 40 50 60 70 80 90 100 200
4
3
2
1
0
Plocha uzemění [□mm]
Zisk [dBi]
//
Závislost zisku na ploše uzeměnípatch □25mm
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 27
Podpora vývojePodpora vývoje Podrobná technická dokumentace● Katalogové listy● Hardware Integration Manual● Receiver Description and Protocol Specification● Aplikační poznámky● Demo Design
Software● u-center
• Seznámení s moduly u-blox• Analýza modulů• Statistické zpracování dat• Servisní SW• Volně ke stažení na www.u-blox.com
Vývojové sady● EVK-6
• Samostatný GPS● EVK-xx6x
• GPS + GSMTechnické dotazy
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 28
Výhled - FW7.00Výhled - FW7.00Zlepšená citlivost navigace do -162dBmSnížená spotřeba a zlepšená efektivita PMAssitNOW Autonomus
● Žádné stahování dat z internetu● Predikce Eph na 3 dny (= platnost dat)● Start od 12s● Přesnost od 10m
Map Matching Input● Zlepšení navigace na základě zpětné vazby s mapovým podkladem
RTCM (DGPS)● Konečně!● V 2.3● Data typ 1, 2, 3 a 9
Detekce rušení● 4 úrovně varování
Uvolnění● FW (FLASH): December 2010● Moduly ROM: Jún 2011
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 29
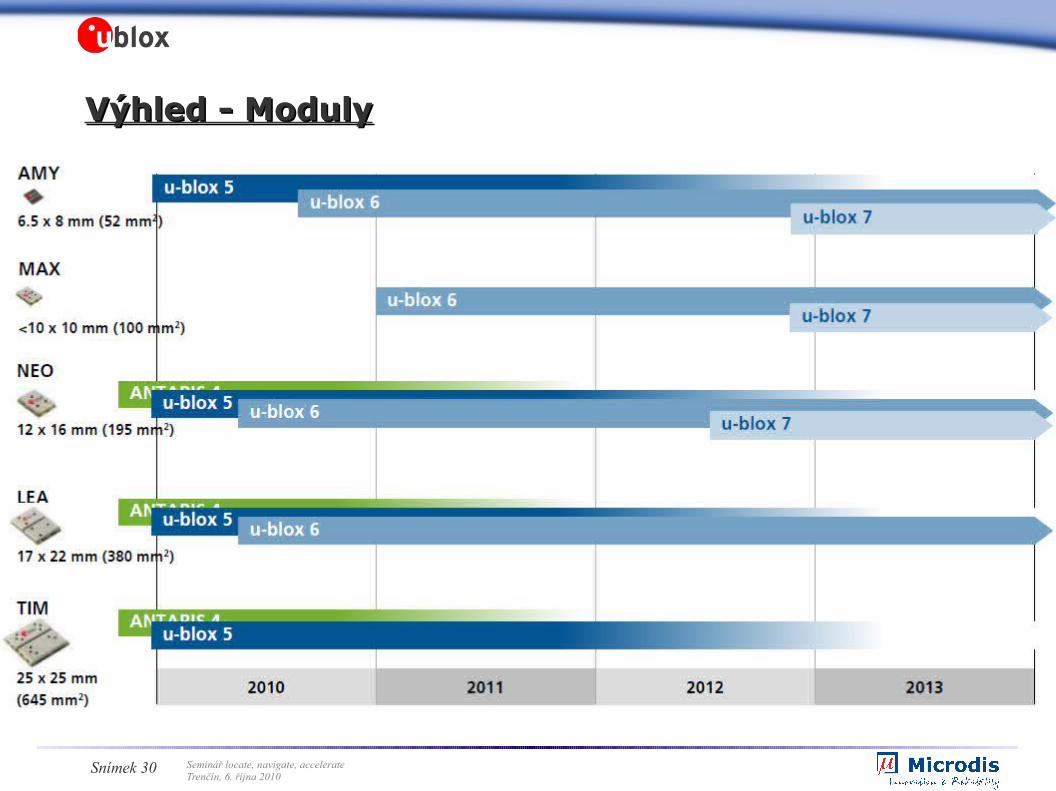
Výhled - ModulyVýhled - Moduly
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 30
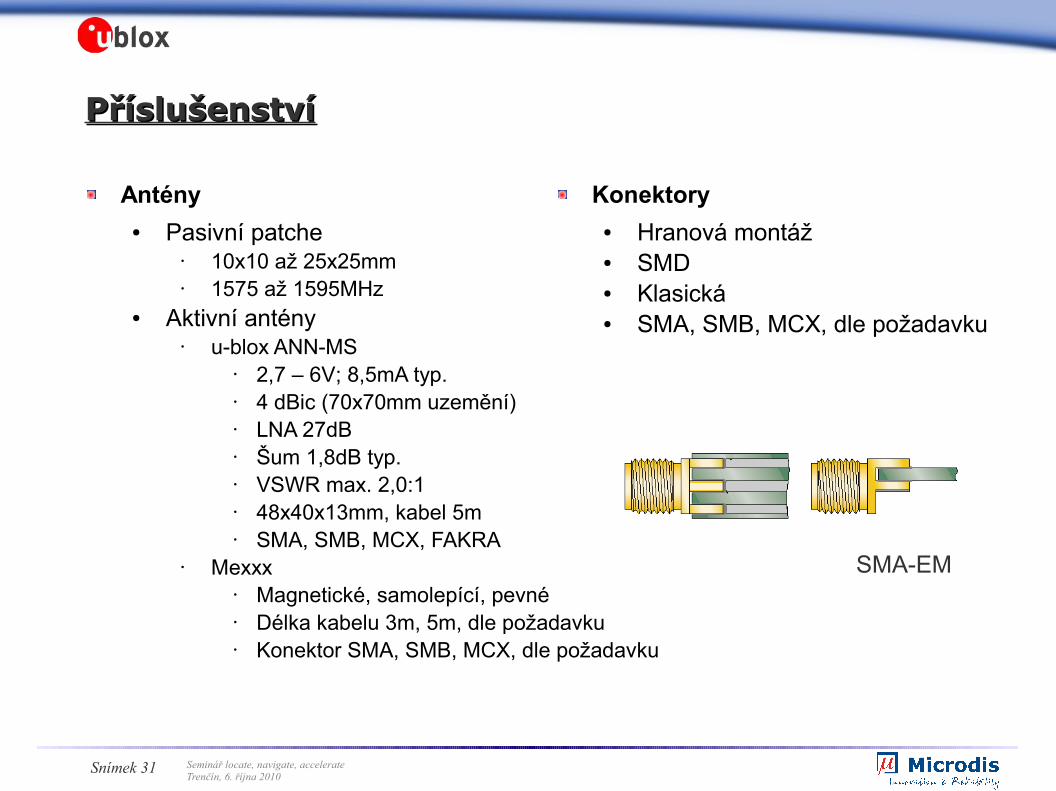
PříslušenstvíPříslušenství
Antény● Pasivní patche
• 10x10 až 25x25mm• 1575 až 1595MHz
● Aktivní antény• u-blox ANN-MS
• 2,7 – 6V; 8,5mA typ.• 4 dBic (70x70mm uzemění)• LNA 27dB• Šum 1,8dB typ.• VSWR max. 2,0:1• 48x40x13mm, kabel 5m• SMA, SMB, MCX, FAKRA
• Mexxx• Magnetické, samolepící, pevné• Délka kabelu 3m, 5m, dle požadavku• Konektor SMA, SMB, MCX, dle požadavku
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 31
Konektory● Hranová montáž● SMD● Klasická● SMA, SMB, MCX, dle požadavku
SMA-EM
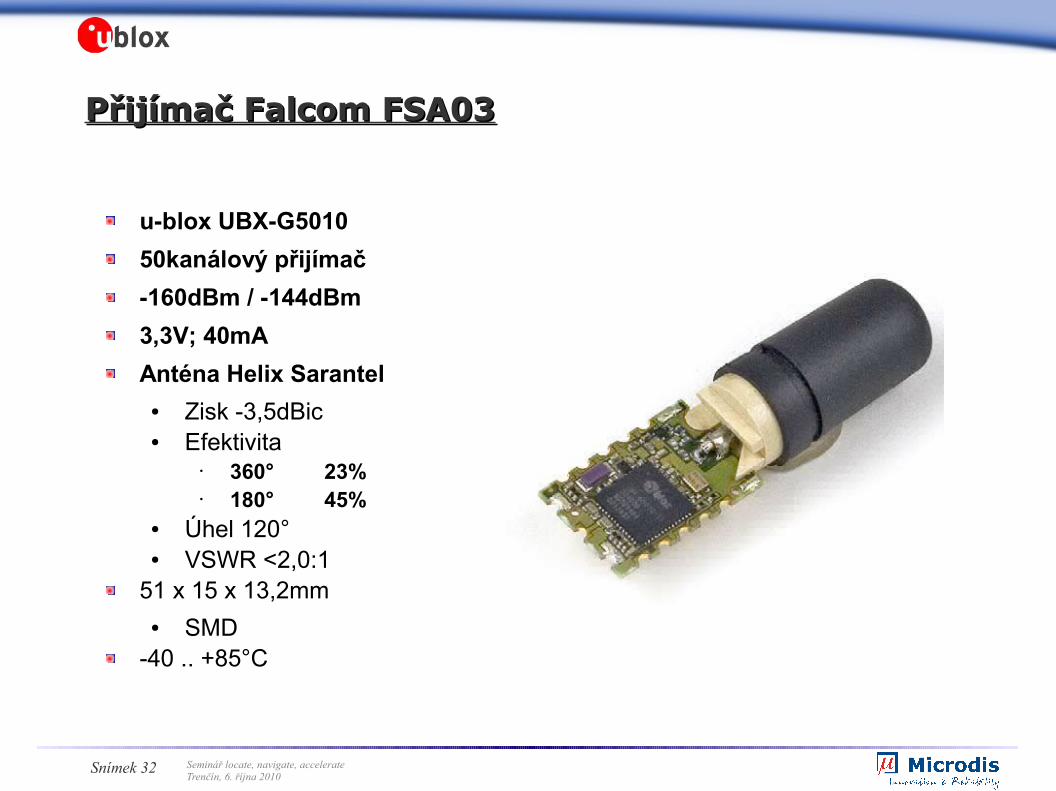
Přijímač Falcom FSA03Přijímač Falcom FSA03
u-blox UBX-G501050kanálový přijímač-160dBm / -144dBm3,3V; 40mAAnténa Helix Sarantel
● Zisk -3,5dBic● Efektivita
• 360° 23% • 180° 45%
● Úhel 120°● VSWR <2,0:1
51 x 15 x 13,2mm● SMD
-40 .. +85°C
Seminář locate, navigate, accelerateTrenčín, 6. října 2010
Snímek 32
Recommended















![Protocol Specification [μ-blox GPS-MS1 and GPS-PS1] (GPS G1-X-00005)](https://img.pdfslide.tips/doc/110x75/552961054a795986158b46e0/protocol-specification-blox-gps-ms1-and-gps-ps1-gps-g1-x-00005.jpg)

