RESPOSTA EM FREQUÊNCIA: DIAGRAMA DE BODE
CCL
Profa. Mariana Cavalca
Baseado em: MAYA, Paulo Álvaro; LEONARDI, Fabrizio. Controle essencial. São Paulo: Pearson, 2011.
OGATA, Katsuhiko. Engenharia de controle moderno. 3. ed. Rio de Janeiro: Prentice Hall, c1998.
Apostila de Análise de Sistemas Lineares – ASL do Prof. Dr. André Bittencourt Leal
Material do Prof. Eduardo Bonci Cavalca
Definições
Considerando no plano 𝑠 um número complexo com parte
real nula e parte imaginária 𝜔, tal como:
𝑠 = 0 + 𝑗𝜔 = 𝑗𝜔
obtemos a Transformada de Fourier a partir da
Transformada de Laplace. Portanto, neste caso:
𝐺 𝑠 =𝑌(𝑠)
𝑈(𝑠)= 𝐺(0 + 𝑗𝜔)= G 𝑗𝜔 =
𝑌(𝑗𝜔)
𝑈(𝑗𝜔)
Definições
• A resposta em frequência é a resposta em regime
estacionário de um sistema para uma entrada do tipo
senoidal. Desse modo, variamos a frequência do sinal de
entrada em uma faixa de interesse e estudamos a
resposta em frequência resultante.
• A partir da resposta em frequência é possível analisar o
comportamento de um processo bem como projetar um
controlador de modo que a malha atenda determinados
requisitos de desempenho.
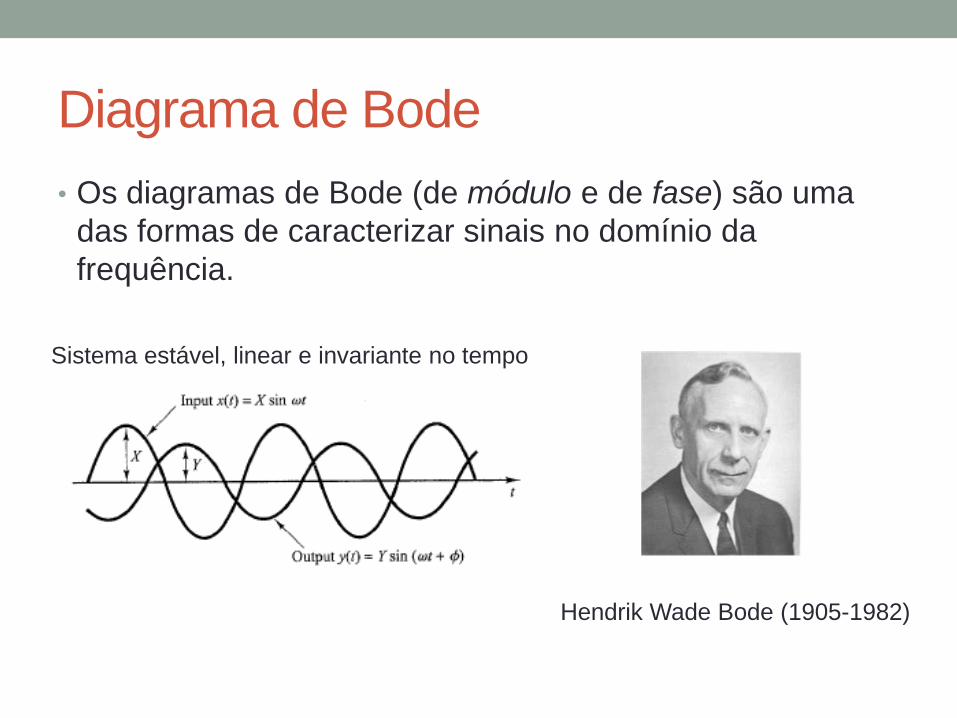
Diagrama de Bode
• Os diagramas de Bode (de módulo e de fase) são uma
das formas de caracterizar sinais no domínio da
frequência.
Hendrik Wade Bode (1905-1982)
Sistema estável, linear e invariante no tempo
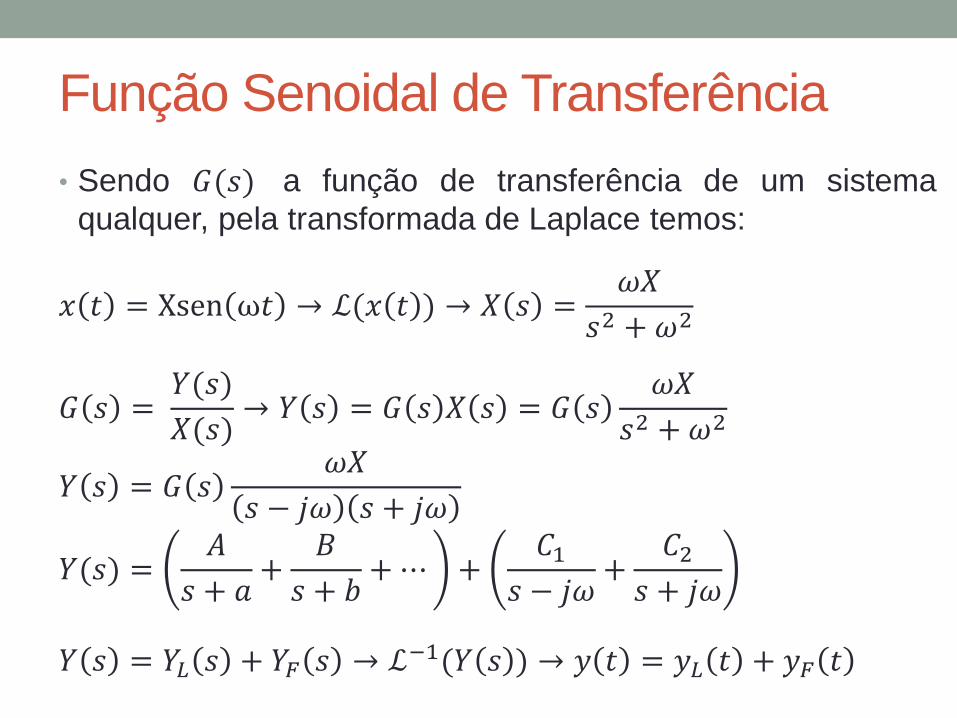
• Sendo 𝐺(𝑠) a função de transferência de um sistema
qualquer, pela transformada de Laplace temos:
𝑥 𝑡 = Xsen ω𝑡 → ℒ(𝑥 𝑡 ) → 𝑋 𝑠 =𝜔𝑋
𝑠2 +𝜔2
𝐺 𝑠 = 𝑌(𝑠)
𝑋(𝑠)→ 𝑌 𝑠 = 𝐺 𝑠 𝑋 𝑠 = 𝐺 𝑠
𝜔𝑋
𝑠2 +𝜔2
𝑌 𝑠 = 𝐺 𝑠𝜔𝑋
𝑠 − 𝑗𝜔 𝑠 + 𝑗𝜔
𝑌(𝑠) =𝐴
𝑠 + 𝑎+
𝐵
𝑠 + 𝑏+⋯ +
𝐶1𝑠 − 𝑗𝜔
+𝐶2
𝑠 + 𝑗𝜔
𝑌 𝑠 = 𝑌𝐿 𝑠 + 𝑌𝐹 𝑠 → ℒ−1(𝑌 𝑠 ) → 𝑦 𝑡 = 𝑦𝐿 𝑡 + 𝑦𝐹 𝑡
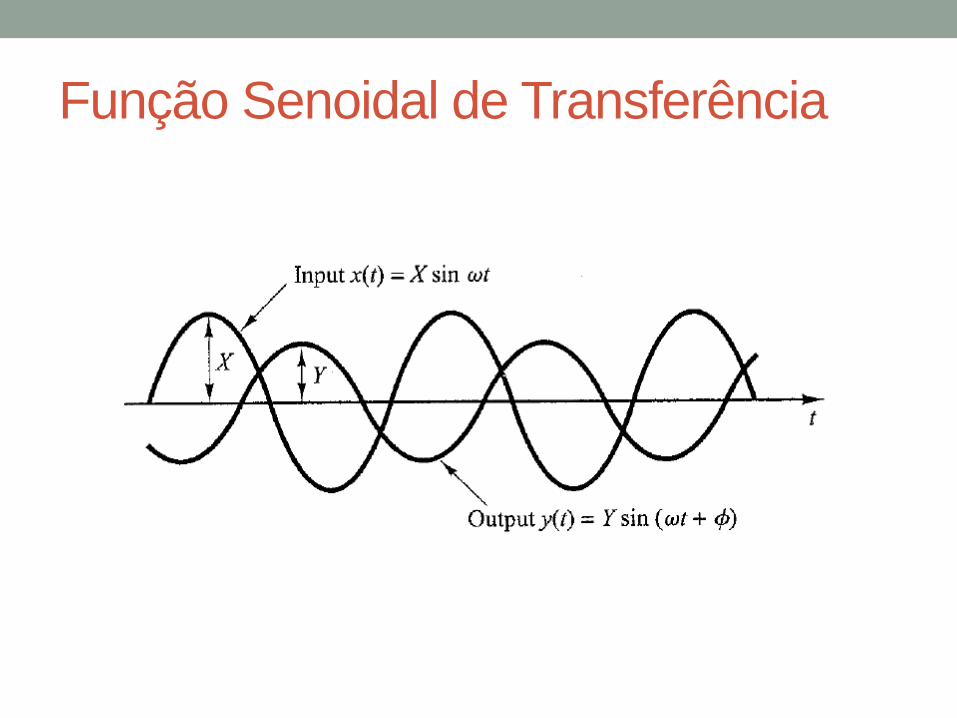
Função Senoidal de Transferência
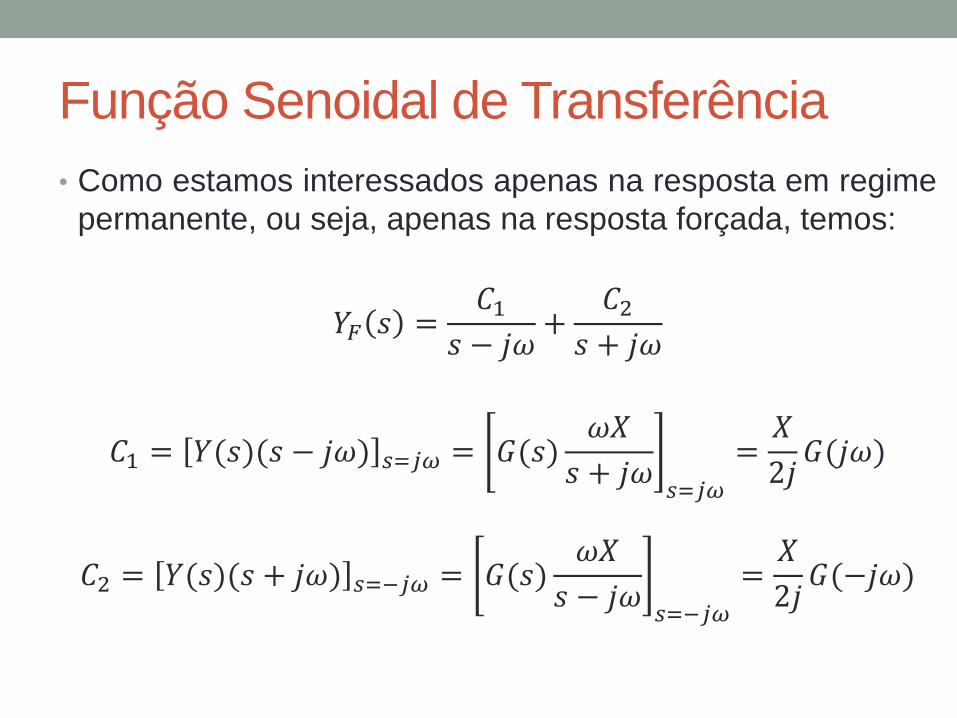
• Como estamos interessados apenas na resposta em regime
permanente, ou seja, apenas na resposta forçada, temos:
𝑌𝐹 𝑠 =𝐶1
𝑠 − 𝑗𝜔+
𝐶2𝑠 + 𝑗𝜔
𝐶1 = 𝑌(𝑠)(𝑠 − 𝑗𝜔) 𝑠=𝑗𝜔 = 𝐺(𝑠)𝜔𝑋
𝑠 + 𝑗𝜔𝑠=𝑗𝜔
=𝑋
2𝑗𝐺(𝑗𝜔)
𝐶2 = 𝑌(𝑠)(𝑠 + 𝑗𝜔) 𝑠=−𝑗𝜔 = 𝐺(𝑠)𝜔𝑋
𝑠 − 𝑗𝜔𝑠=−𝑗𝜔
=𝑋
2𝑗𝐺(−𝑗𝜔)
Função Senoidal de Transferência
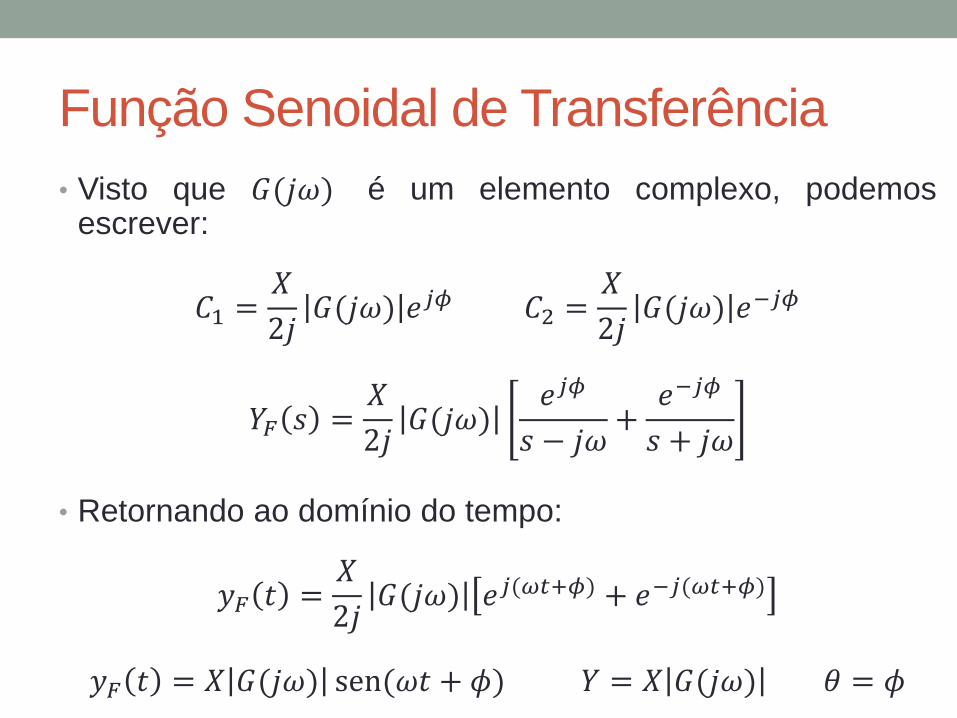
• Visto que 𝐺(𝑗𝜔) é um elemento complexo, podemos escrever:
𝐶1 =𝑋
2𝑗𝐺(𝑗𝜔) 𝑒𝑗𝜙 𝐶2 =
𝑋
2𝑗𝐺(𝑗𝜔) 𝑒−𝑗𝜙
𝑌𝐹 𝑠 =𝑋
2𝑗𝐺(𝑗𝜔)
𝑒𝑗𝜙
𝑠 − 𝑗𝜔+
𝑒−𝑗𝜙
𝑠 + 𝑗𝜔
• Retornando ao domínio do tempo:
𝑦𝐹 𝑡 =𝑋
2𝑗𝐺(𝑗𝜔) 𝑒𝑗(𝜔𝑡+𝜙) + 𝑒−𝑗(𝜔𝑡+𝜙)
𝑦𝐹 𝑡 = 𝑋 𝐺(𝑗𝜔) sen(𝜔𝑡 + 𝜙) 𝑌 = 𝑋 𝐺(𝑗𝜔) 𝜃 = 𝜙
Função Senoidal de Transferência
Função Senoidal de Transferência
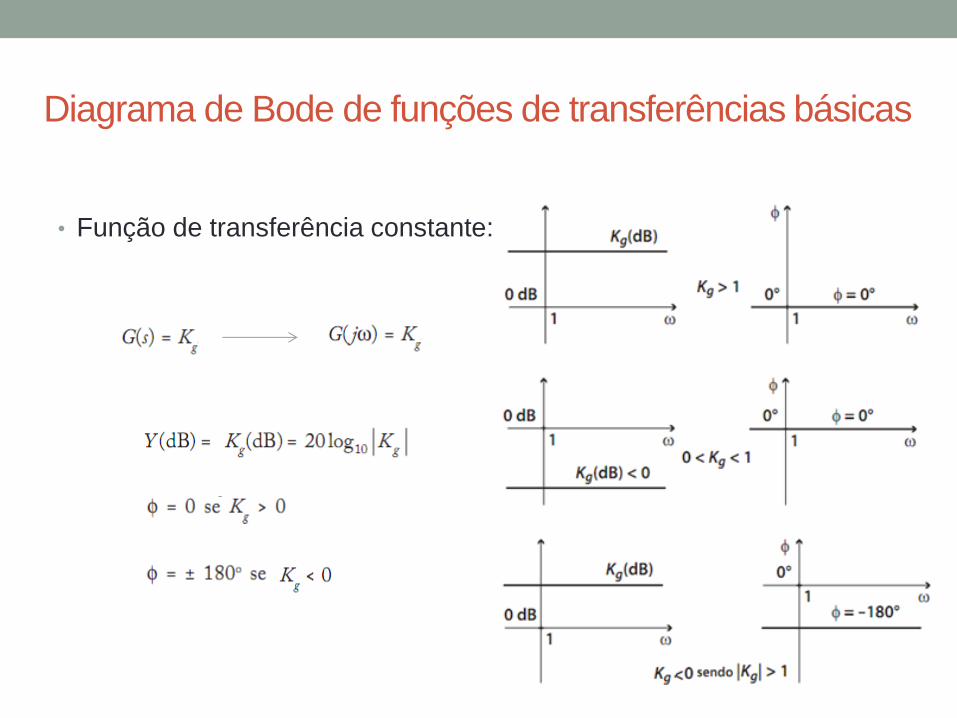
Diagrama de Bode de funções de transferências básicas
• Função de transferência constante:
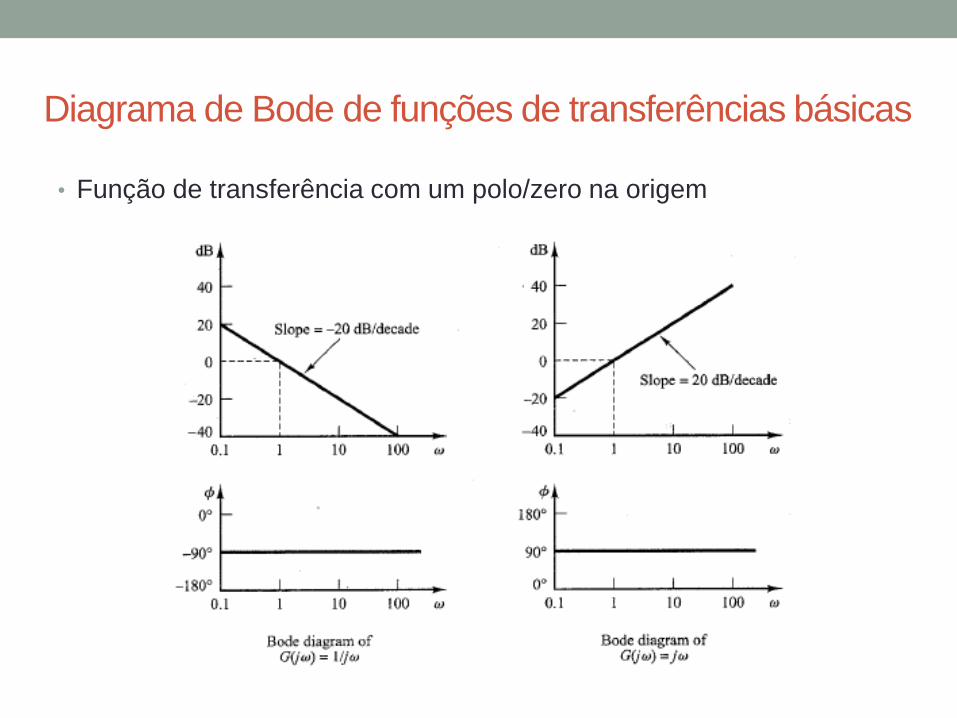
Diagrama de Bode de funções de transferências básicas
• Função de transferência com um polo/zero na origem
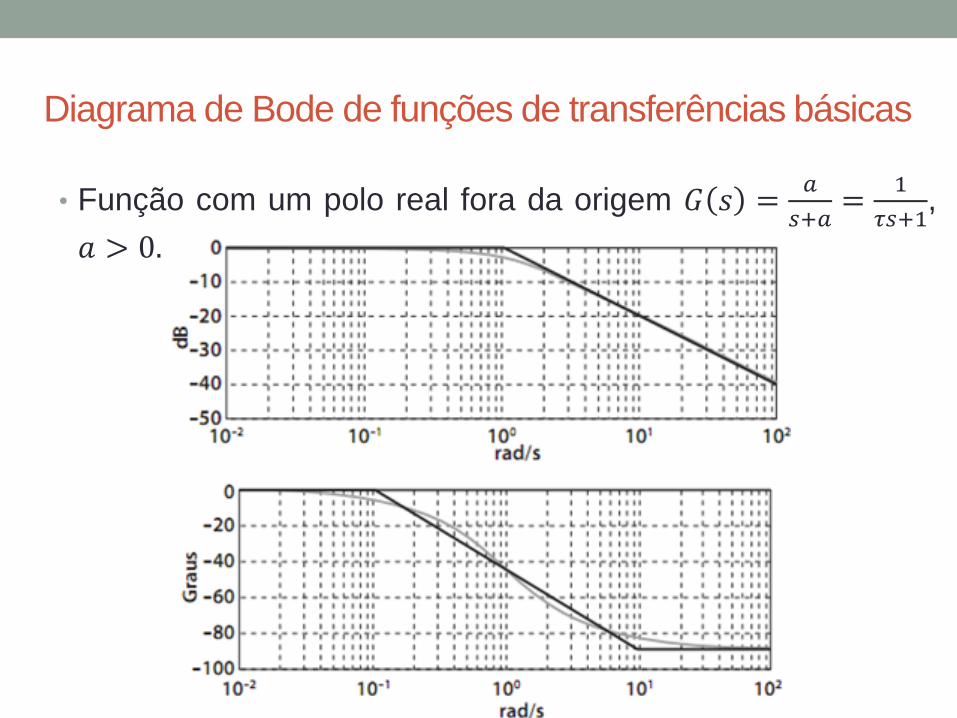
• Função com um polo real fora da origem 𝐺 𝑠 =𝑎
𝑠+𝑎=
1
𝜏𝑠+1,
𝑎 > 0.
Diagrama de Bode de funções de transferências básicas
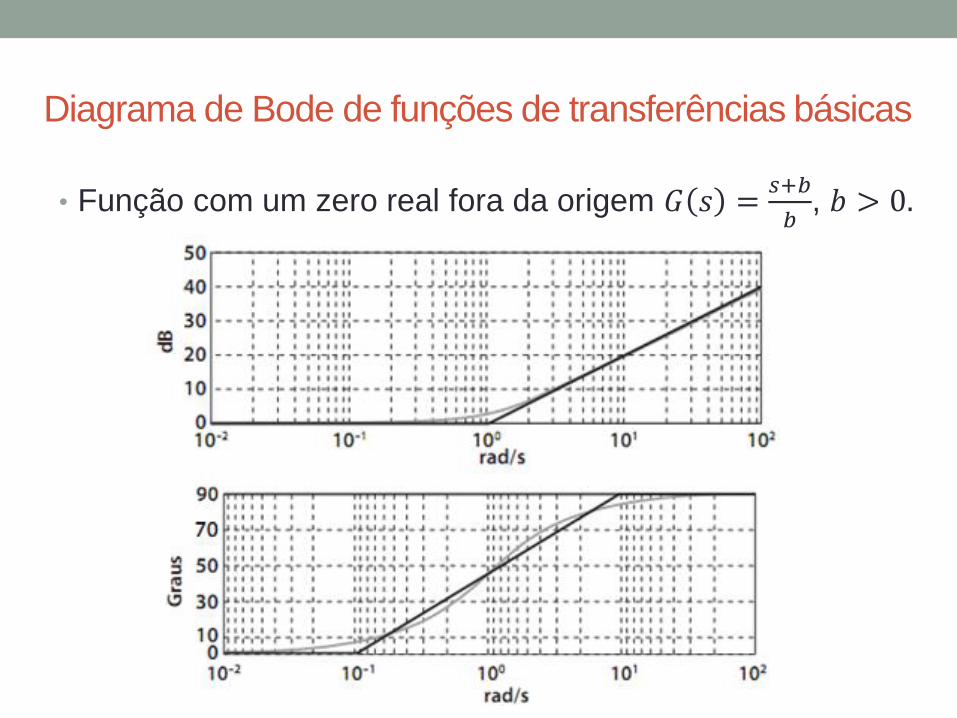
• Função com um zero real fora da origem 𝐺 𝑠 =𝑠+𝑏
𝑏, 𝑏 > 0.
Diagrama de Bode de funções de transferências básicas
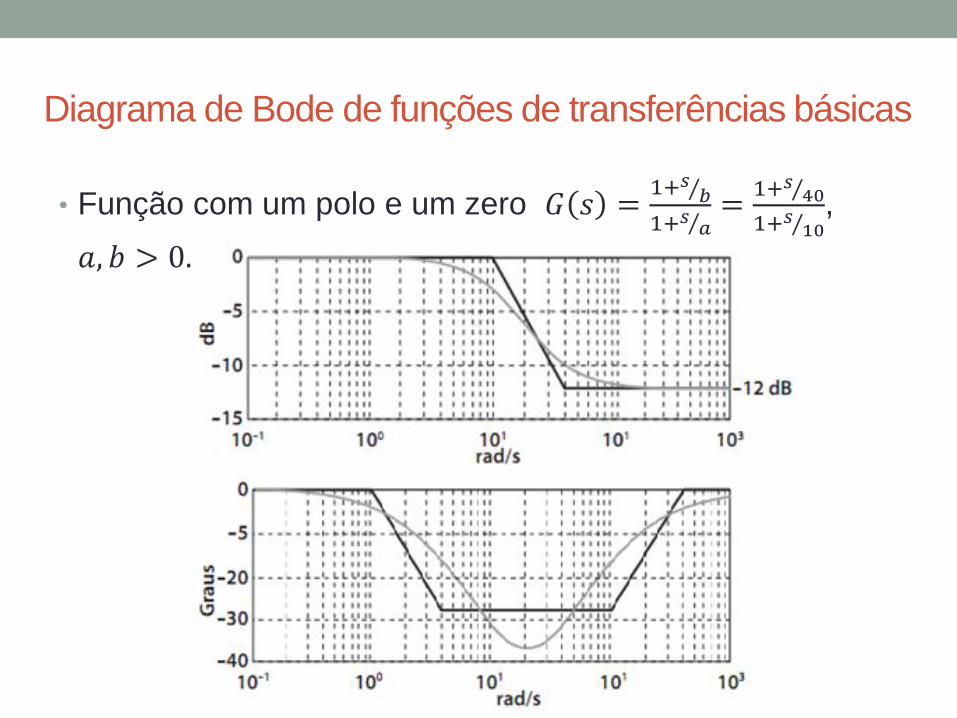
• Função com um polo e um zero 𝐺 𝑠 =1+𝑠
𝑏
1+𝑠𝑎 =
1+𝑠40
1+𝑠10
,
𝑎, 𝑏 > 0. . .
Diagrama de Bode de funções de transferências básicas
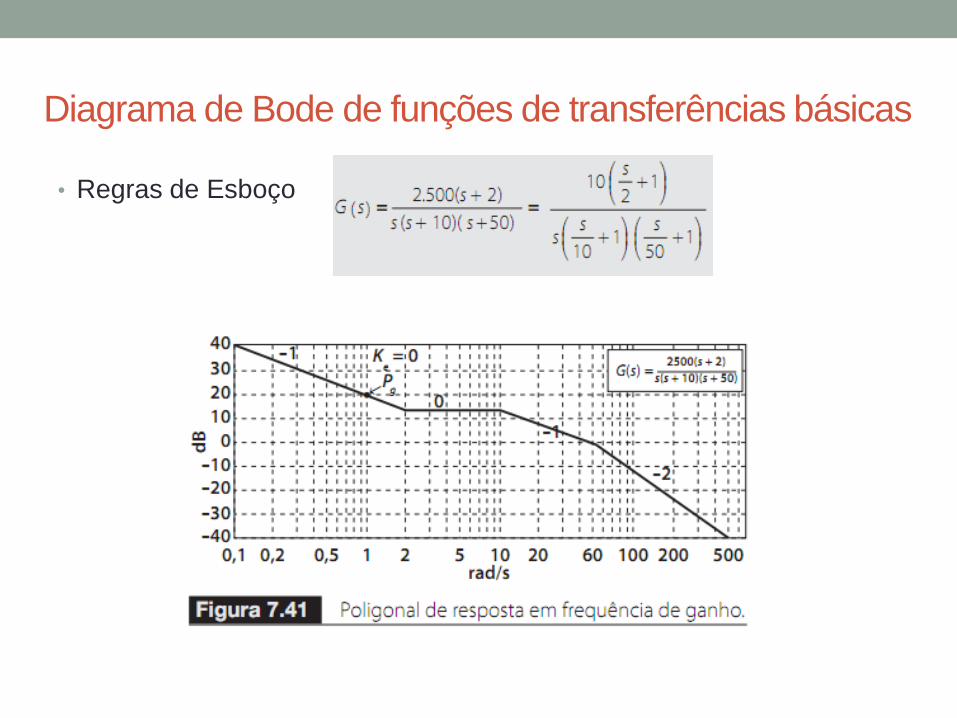
Diagrama de Bode de funções de transferências básicas
• Regras de Esboço
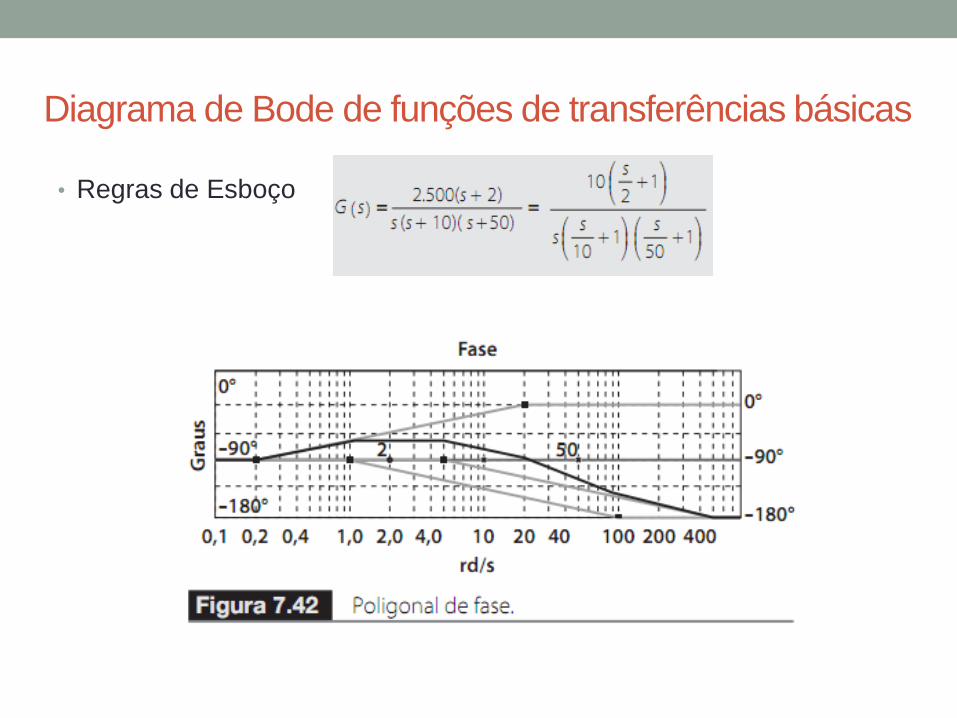
Diagrama de Bode de funções de transferências básicas
• Regras de Esboço
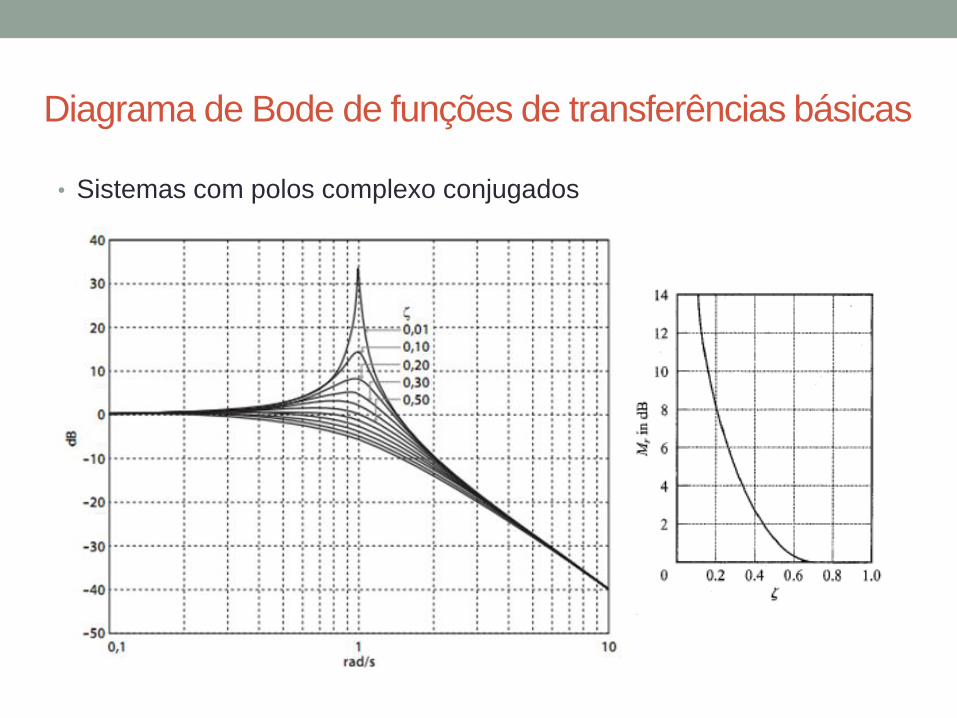
Diagrama de Bode de funções de transferências básicas
• Sistemas com polos complexo conjugados
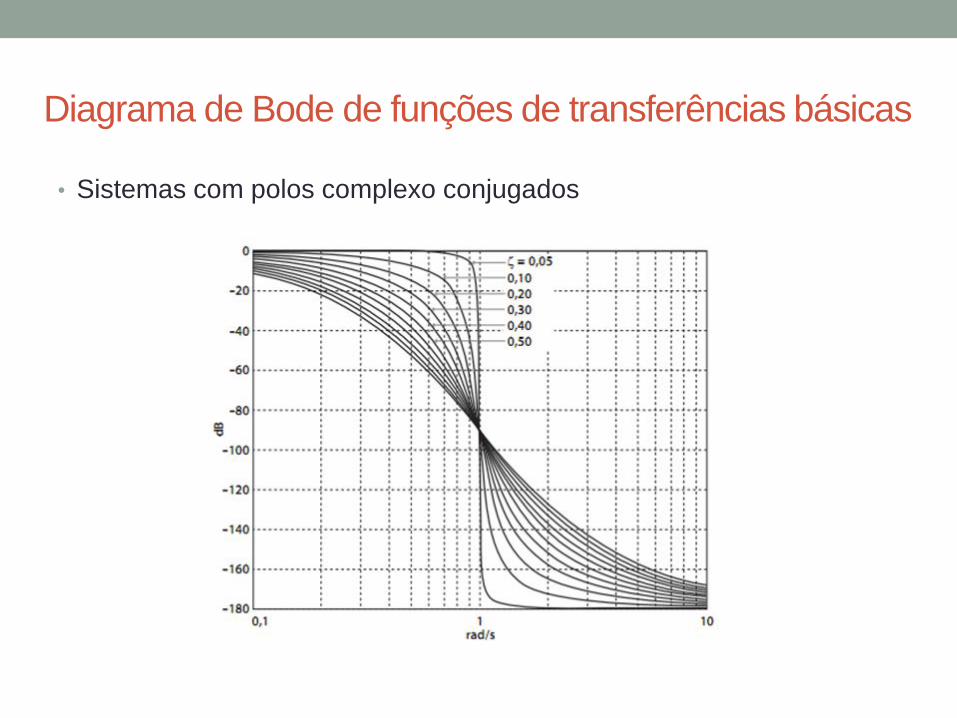
Diagrama de Bode de funções de transferências básicas
• Sistemas com polos complexo conjugados
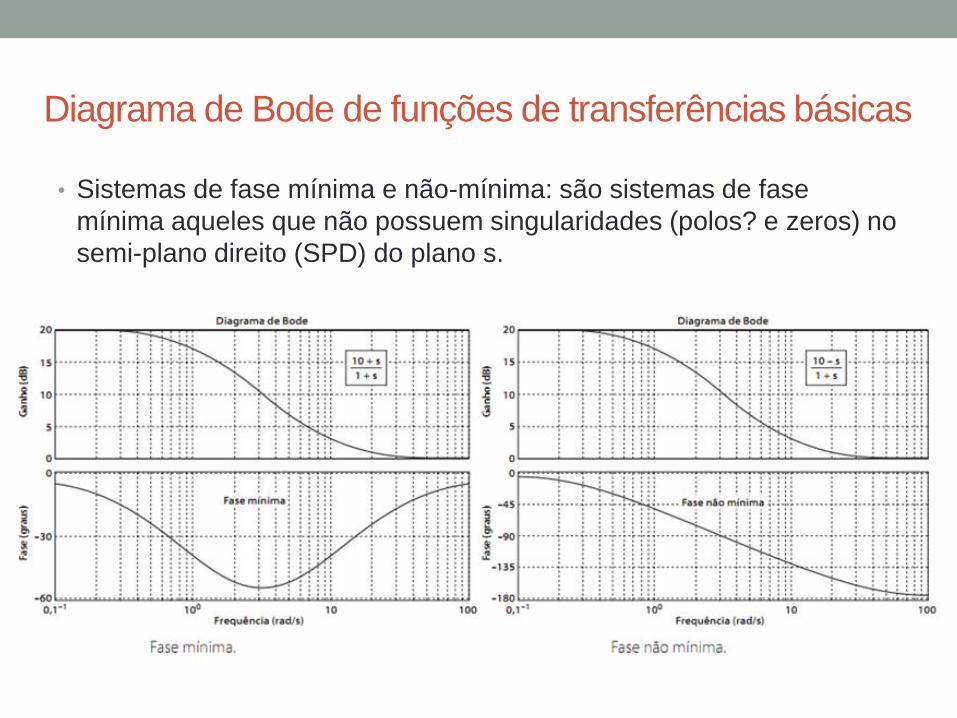
Diagrama de Bode de funções de transferências básicas
• Sistemas de fase mínima e não-mínima: são sistemas de fase
mínima aqueles que não possuem singularidades (polos? e zeros) no
semi-plano direito (SPD) do plano s.
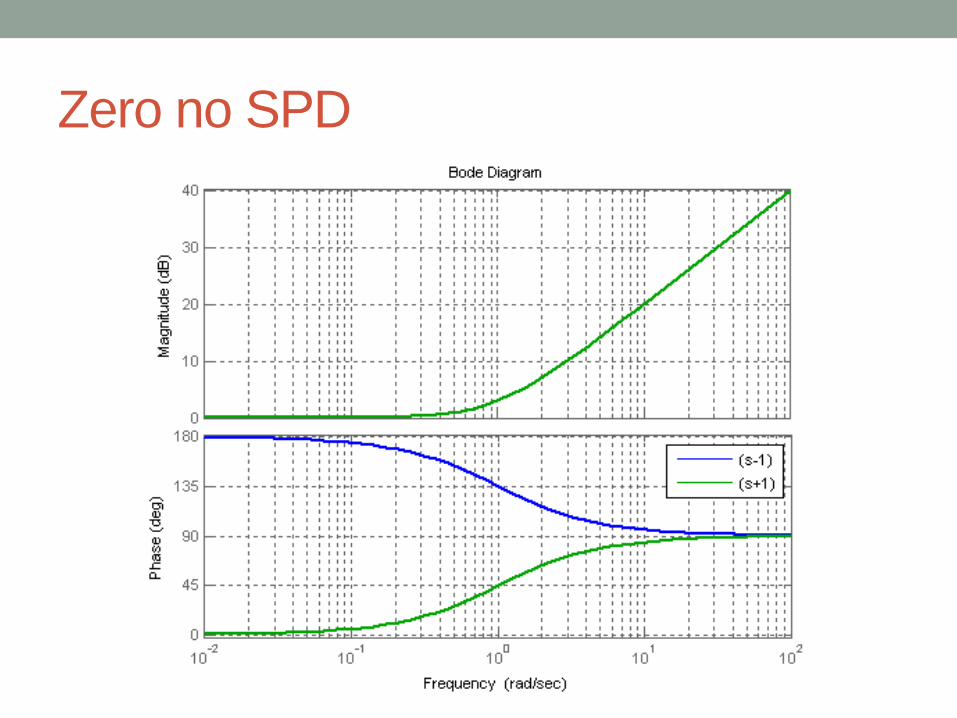
Zero no SPD
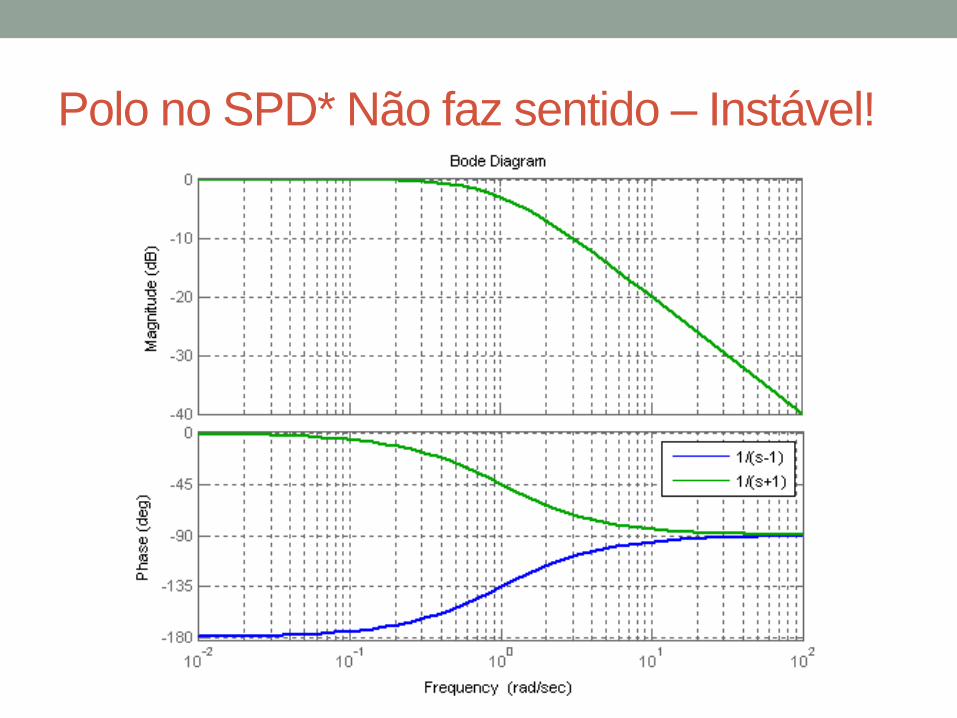
Polo no SPD* Não faz sentido – Instável!
Regra básica
• Para sistemas de fase mínima, o ângulo de fase para 𝜔 = ∞
se torna −90° 𝑞 − 𝑝 , onde p e q são os graus de liberdade
dos polinômios do numerador e do denominador da função de
transferência, respectivamente. Nesse estudo não
consideramos o diagrama de Bode de sistemas instáveis. Logo
é possível detectar se um sistema é ou não de fase mínima
examinando o gráfico de módulo e o ângulo de fase em
𝜔 = ∞ .
Tipo do sistema x curva de módulo e de fase
• Os coeficientes de erro estático de posição, velocidade e
aceleração descrevem o comportamento em baixa
frequência de sistemas tipo 0 (sem polos na origem), tipo
1 e tipo 2, respectivamente.
• O tipo do sistema determina a inclinação da curva de
módulo em baixas frequências. Portanto, a informação
relativa à existência e amplitude do erro em regime
estacionário de um sistema de controle, para uma dada
entrada, pode ser determinada a partir da observação da
região de baixa frequência na curva de módulo do
diagrama de Bode.
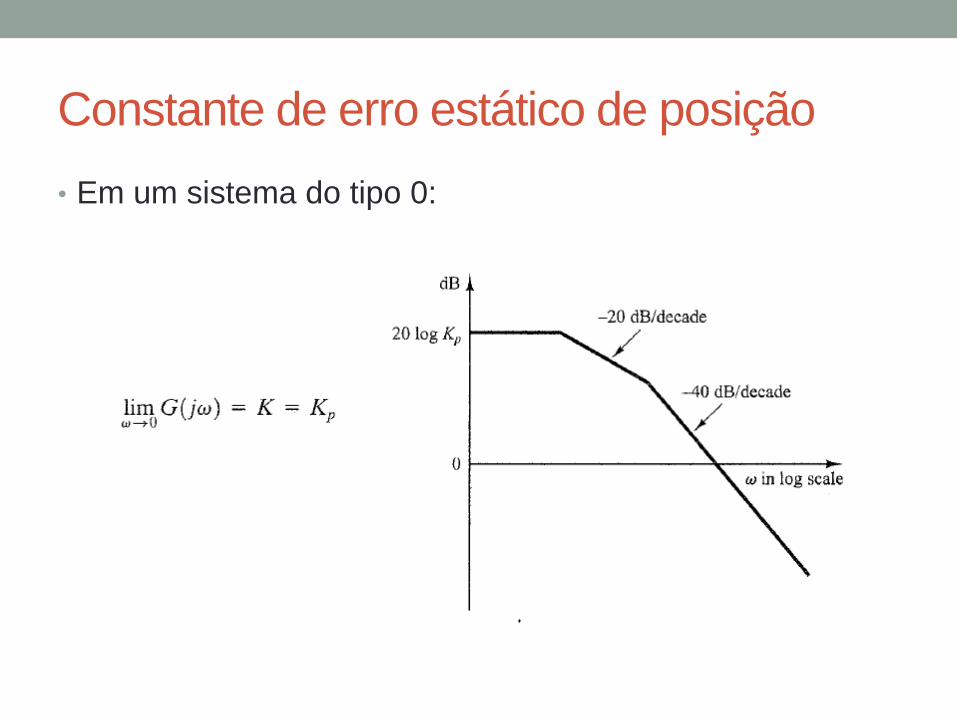
Constante de erro estático de posição
• Em um sistema do tipo 0:
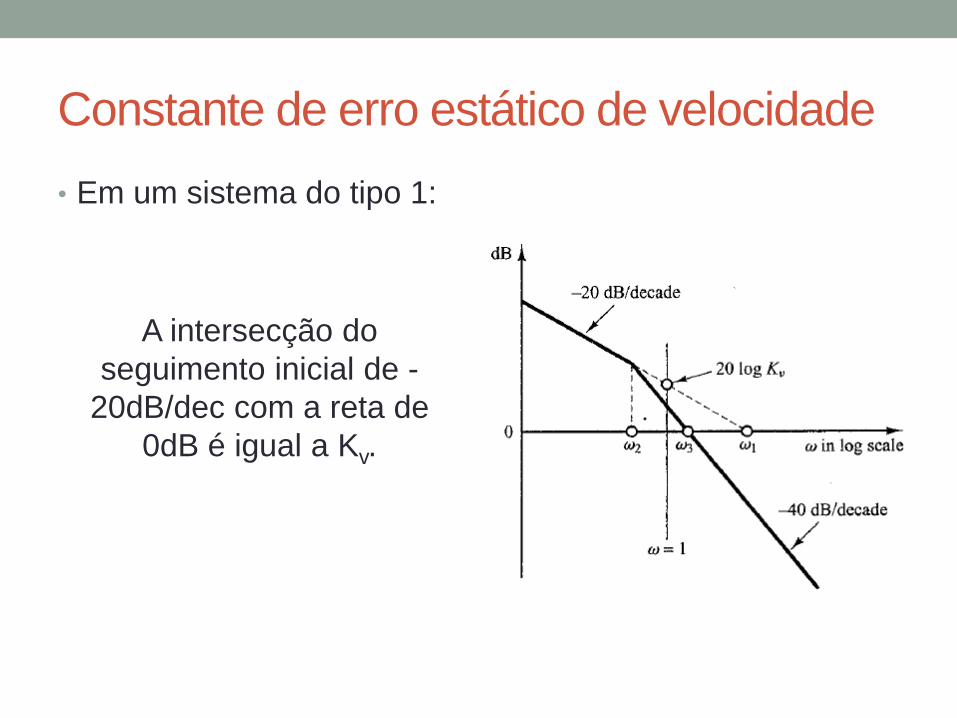
Constante de erro estático de velocidade
• Em um sistema do tipo 1:
A intersecção do
seguimento inicial de -
20dB/dec com a reta de
0dB é igual a Kv.
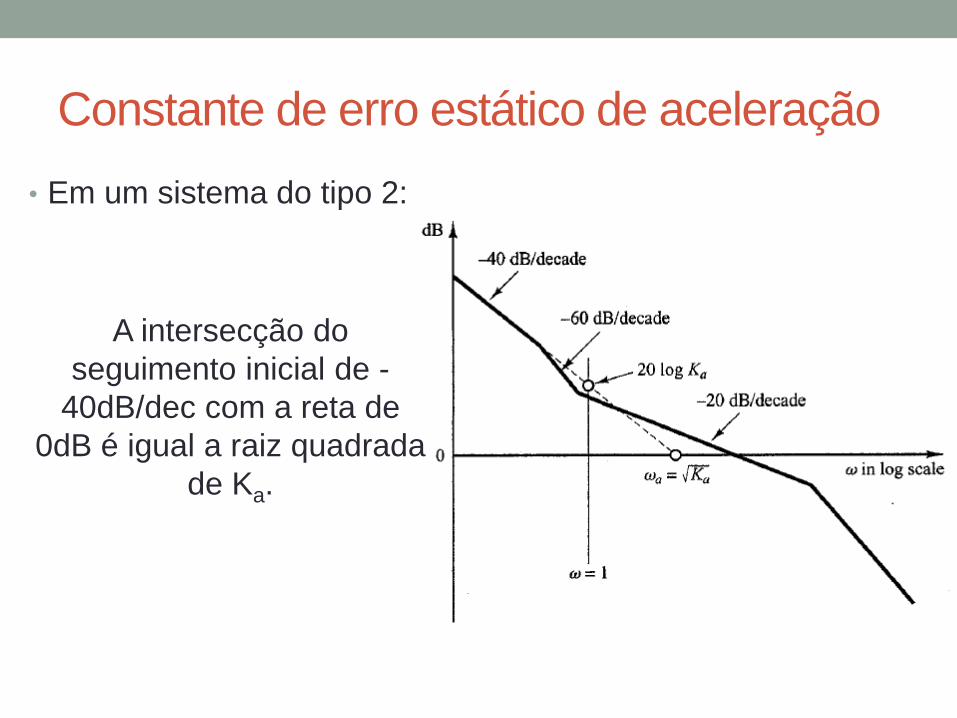
Constante de erro estático de aceleração
• Em um sistema do tipo 2:
A intersecção do
seguimento inicial de -
40dB/dec com a reta de
0dB é igual a raiz quadrada
de Ka.
Análise de estabilidade pelo Diagrama de Bode
• O gráfico de Bode de uma função de transferência é uma ferramenta muito
útil para análise e projeto de sistemas de controle lineares.
• Vantagem: Na ausência de um computador, o diagrama de Bode pode ser
obtido, de forma aproximada, através de suas propriedades assintóticas.
• Desvantagem: Estabilidade absoluta e relativa podem ser determinadas
através do diagrama de Bode somente para sistemas de fase mínima*.
* Fase mínima – sem polos ou zeros no semi-plano direito.
Considerações Finais
• O gráfico de Bode de uma função de transferência é uma ferramenta
muito útil para análise e projeto de sistemas de controle lineares.
Vantagem: Na ausência de um computador, o diagrama de Bode pode
ser obtido, de forma aproximada, através de suas propriedades
assintóticas.
Desvantagem: Estabilidade absoluta e relativa podem ser determinadas
através do diagrama de Bode somente para sistemas de fase mínima.
Exercícios Propostos
1. 𝐺 𝑠 =200(𝑠+1)
𝑠(𝑠+5)
2. 𝐺 𝑠 =200(𝑠+2)
(𝑠+0,2)(𝑠+20)
3. Revise os conceitos das constantes de erro estacionário.
Bom estudo!
RESPOSTA EM FREQUÊNCIA: DIAGRAMA DE BODE
CCL
Profa. Mariana Cavalca
Bom estudo!
Recommended