
SEM0317 SEM0317 –– Aula 8Aula 8
Dinâmica de Manipuladores Dinâmica de Manipuladores RobóticosRobóticosRobóticosRobóticos
Prof. Dr. Marcelo BeckerProf. Dr. Marcelo BeckerEESC - USP

•• IntroduçãoIntrodução
• Método Newton-Euler
• Método de Krane
Sumário da AulaSumário da Aula
• Método de Krane
• Exemplos de Aplicação
• Exercícios Recomendados
• Bibliografia Recomendada
EESC-USP © M. Becker 2008 2/77

IntroduçãoIntrodução• O porquê do uso de modelos dinâmicos em robótica:
EESC-USP © M. Becker 2008 3/77

IntroduçãoIntrodução• O porquê do uso de modelos dinâmicos em robótica:
EESC-USP © M. Becker 2008 4/77
IntroduçãoIntrodução
• Deseja-se compreender:– Torques e Forças (internos/externos)
• 2 problemas principais:– Dados deseja-se:θθθ &&&e, τ– Dados deseja-se:– Como o manipulador irá se movimentar
com a aplicação de ,ou seja, obter:
• Base: sistemas multi-corpos
θθθ &&&e, τ
τθθθ &&&e,
EESC-USP © M. Becker 2008 5/77

IntroduçãoIntrodução• Equações de Movimento...
),(),()( uqFuqVuqM =+&
),()( tqBqqAu += &
iam ⋅=∑F
ω×ω+α=τ∑ II
Formulação Mínima → G.D.L.Formulação Completa → Corpos
),()( tqBqqAu += &ω×ω+α=τ∑ II
EESC-USP © M. Becker 2008 6/77

IntroduçãoIntrodução• Descrição da Dinâmica...
Dinâmica Direta (Simulação)
Dados: Posições e Velocidades no instante inicial t0
Forças e Torques (F , τ) no instante inicial t0τ 0
Leis de Formação para F e τ quando t > t0
(Exemplo: Leis de Controle)Procura-se: Movimentos resultantes
(comportamento) para t > t0SOLUÇÃO
Integração das Equações de Movimento
Sist. de Equações Diferenciais
EESC-USP © M. Becker 2008 7/77
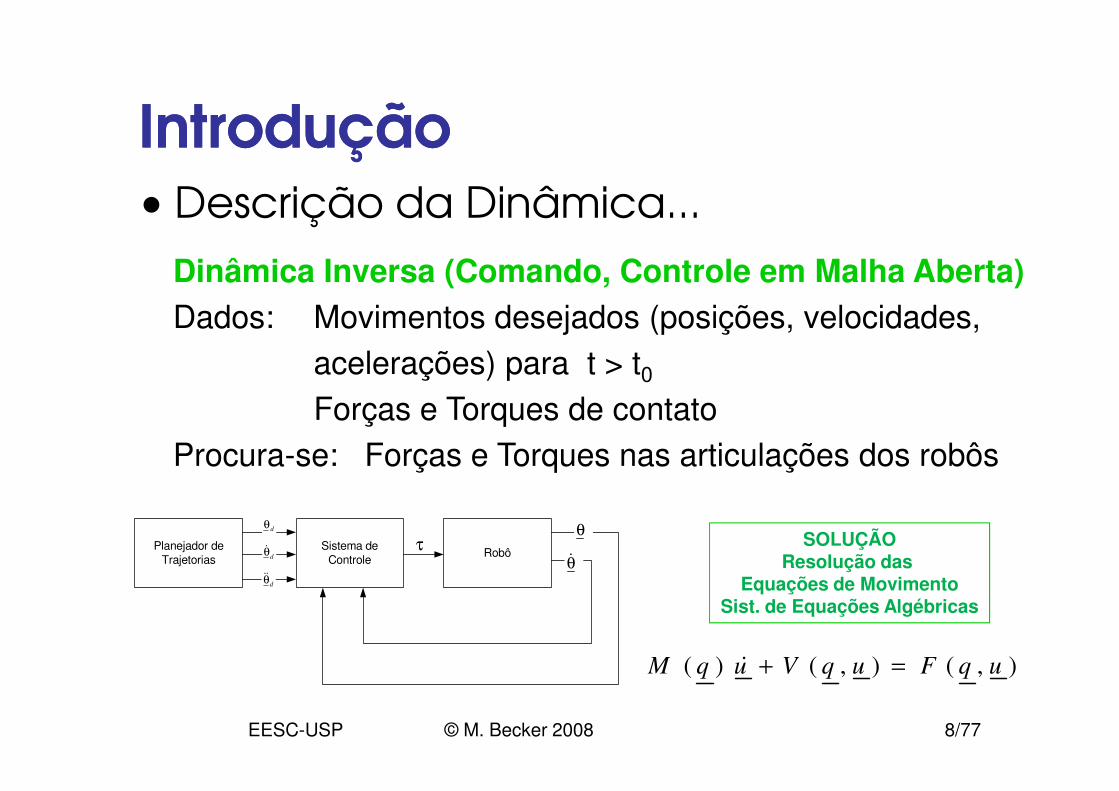
IntroduçãoIntrodução• Descrição da Dinâmica...
Dinâmica Inversa (Comando, Controle em Malha Aberta)
Dados: Movimentos desejados (posições, velocidades,acelerações) para t > t0Forças e Torques de contatoForças e Torques de contato
Procura-se: Forças e Torques nas articulações dos robôs
SOLUÇÃOResolução das
Equações de MovimentoSist. de Equações Algébricas
Planejador deTrajetorias
Sistema deControle
Robôτ
dθ
dθ&
dθ&&
θ
θ&
),(),()( uqFuqVuqM =+&
EESC-USP © M. Becker 2008 8/77
IntroduçãoIntrodução
• Métodos mais empregados em Robótica:– Newton-Euler (N-E)– Krane– Krane– Lagrange-Euler (L-E)– Equações Generalizadas de d’Alembert (D)
• Qual empregar?
EESC-USP © M. Becker 2008 9/77

IntroduçãoIntrodução
• Comparação (Fu et al., 1987): n - DoFs
Método L-E N-E D
Multiplicações128/3n
4 + 512/3n3 +
739/3n2 + 160/3n
132n13/6n
3 + 105/2n2 +
268/3n + 69739/3n2 + 160/3n
268/3n + 69
Adições98/3n
4 + 781/6n3 +
559/3n2 + 245/6n
111n - 44/3n
3 +44n3 + 146/3n
2 + 45n
Representação Cinemática
Matrizes Homogêneas 4x4
Matrizes de Rotação e Vetores
de Posição
Matrizes de Rotação e Vetores
de Posição
Equações de Movimento
Equações diferenciais
“closed-form”
Equações Recursivas
Equações diferenciais
“closed-form”
EESC-USP © M. Becker 2008 10/77
IntroduçãoIntrodução
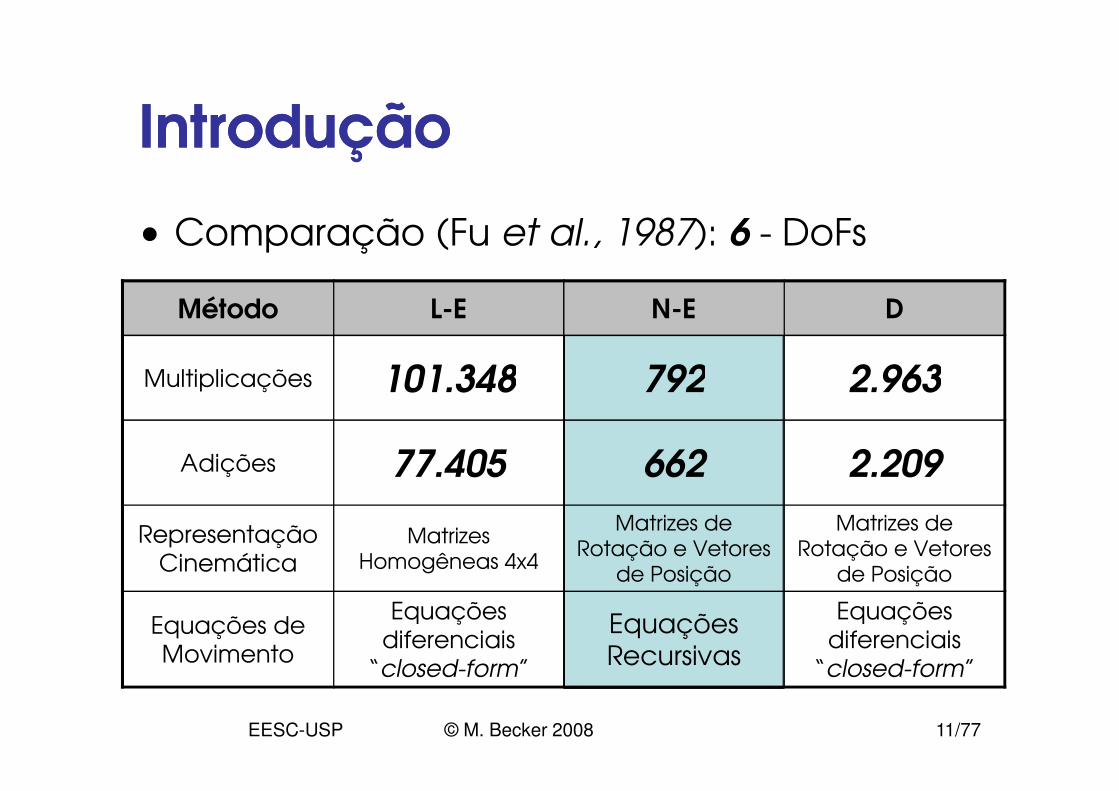
• Comparação (Fu et al., 1987): 6 - DoFs
Método L-E N-E D
Multiplicações 101.348 792 2.963101.348 792 2.963
Adições 77.405 662 2.209
Representação Cinemática
Matrizes Homogêneas 4x4
Matrizes de Rotação e Vetores
de Posição
Matrizes de Rotação e Vetores
de Posição
Equações de Movimento
Equações diferenciais
“closed-form”
Equações Recursivas
Equações diferenciais
“closed-form”
EESC-USP © M. Becker 2008 11/77
IntroduçãoIntrodução• Prós e Contras...
– L-E: � Equações em uma forma bem estruturada;� Computacionalmente dispendiosas...
– N-E:– N-E:� Conjunto de Equações Recursivas;� Dificilmente empregadas para obter leis de
controle mais “avançadas”...
– D:�Equações em uma forma estruturada;� Computacionalmente dispendiosas...
EESC-USP © M. Becker 2008 12/77
Newton-Euler
• Cada corpo rígido é considerado separadamente• Quando da separação de cada corpo, as forças nos mancais
precisam ser introduzidas e posteriormente eliminadas.• O cálculo dos termos de inércia é feito através das
acelerações.
IntroduçãoIntrodução
acelerações.Lagrange-Euler
• O sistema é considerado por completo.• Forças que não produzem trabalho (forças nos mancais), não
precisam ser introduzidas.• O cálculo dos termos de inércia, através da derivada da
energia cinética é trabalhoso em sistemas grandes.• Alguns dos termos calculados, anulam-se posteriormente em
simplificações.
EESC-USP © M. Becker 2008 13/77
Métodos de Projeção - Kane
(Kane, T.R., Levinson, D.A.: "Dynamics: Theory and Application", McGraw-Hill, 1985)
• Trata o sistema como um todo.• Forças que não produzem trabalho (forças nos mancais), não
precisam ser introduzidas.
IntroduçãoIntrodução
precisam ser introduzidas.• Baseado no princípio das potências virtuais. Cálculo dos
termos inerciais através de acelerações e produtos escalares com velocidades parciais.
Outros Métodos de Projeção: destaque especial Manfred Hiller.
EESC-USP © M. Becker 2008 14/77

IntroduçãoIntrodução• Observações...
– É usual desconsiderar forças de Coriolis e Centrífugas para aumentar a velocidade de controladores de manipuladores.de controladores de manipuladores.
– Porém essas forças são significantes no cálculo dos torques das juntas a altas velocidades...
EESC-USP © M. Becker 2008 15/77
Possibilidades para o Controle
• Dedução das equações de movimento com o auxilio do computador
Atenção: Equações de movimento são difíceis de comparar.
IntroduçãoIntrodução
• Simulação das equações de movimento
Atenção: Equações de movimento são difíceis de comparar.
EESC-USP © M. Becker 2008 16/77
Software para análise de Sistemas MulticorposSoftware para análise de Sistemas MulticorposCaracterísticas importantes para diferenciar programasCaracterísticas importantes para diferenciar programas
Catalogo de critériosCatalogo de critérios
• Numérico / Simbólico • Com / sem solução das Equações (Simulação)• Abrangência das equações resultantes respectivamente
duração das Simulações• Capacidade para lidar com equações Lineares / Não-Lineares• Capacidade de Linearização• Equações de Vínculos gerados automaticamente / pelo
usuário• Equações de Vínculos gerados automaticamente / pelo
usuário• Dedução das Equações em modo interativo/ batch• Genérico / Específico para aplicações especiais• Somente corpos rígidos / corpos flexíveis• Forças internas disponíveis diretamente• Com / sem saídas e entradas gráficas• Equipamento necessário / Preço• Documentação e facilidade de ambientação e utilização• Manutenção, suporte técnico
EESC-USP © M. Becker 2008 17/77
Softwares de Interesse p/ Robôs Softwares de Interesse p/ Robôs (Sistemas Multicorpos)(Sistemas Multicorpos)
• Autolev (www.autolev.com)• MSC.ADAMS® (www.mscsoftware.com) • Matlab/Simulink (www.mathworks.com/products/matlab)• (www.cat.csiro.au/cmst/staff/pic/robot)• Matlab/SimMechanics• Matlab/SimMechanics
(www.mathworks.com/products/simmechanics)• Mathematica/TSI ProPac
(www.wolfram.com/products/applications/tsipropac)• Mathematica/Robotica (robot0.ge.uiuc.edu/~spong/Robotica)• Simpact• GraspIt (www1.cs.columbia.edu/~allen/GRASPIT)• Modellica (www.modellica.org)
EESC-USP © M. Becker 2008 18/77
Considerações sobre a construção de Considerações sobre a construção de Modelos para RobôsModelos para Robôs
Modelo + Simples (Possibilidades)• Desprezar acoplamentos entre parte dos corpos dos robôs• Desprezar termos de inércia em V(Q,U), considerando a matriz M(Q)• Exclusão de termos que se mantêm muito pequenos• Corpos como pontos ou barras delgadas (momento de inércia)
Compromisso: descrição mais exata possível e o esforço correspondente
Modelo + Completo (Possibilidades)• Considerar os atritos e as folgas• Mecanismos de transmissão de força como estruturas contendo
massas• Elasticidades locais (redutores)• Motores nos termos de inércia (inércia dos rotores e/ou efeitos
giroscópios)• Elos como estruturas elásticas contínuas• Comportamento de componentes não mecânicos (motor elétrico)• Ambiente externo, inclusão de contato
EESC-USP © M. Becker 2008 19/77
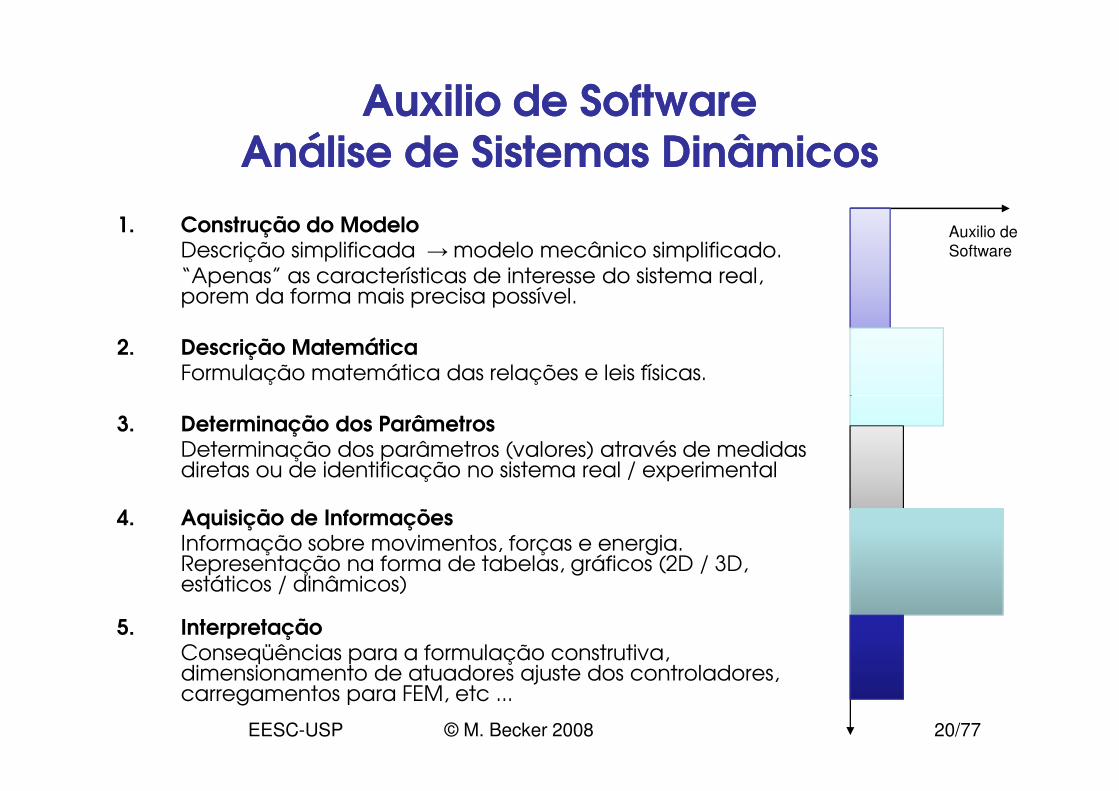
Auxilio de SoftwareAuxilio de SoftwareAnálise de Sistemas DinâmicosAnálise de Sistemas Dinâmicos
1. Construção do ModeloDescrição simplificada → modelo mecânico simplificado.“Apenas” as características de interesse do sistema real, porem da forma mais precisa possível.
2. Descrição MatemáticaFormulação matemática das relações e leis físicas.
Auxilio de Software
3. Determinação dos ParâmetrosDeterminação dos parâmetros (valores) através de medidas diretas ou de identificação no sistema real / experimental
4. Aquisição de InformaçõesInformação sobre movimentos, forças e energia. Representação na forma de tabelas, gráficos (2D / 3D, estáticos / dinâmicos)
5. InterpretaçãoConseqüências para a formulação construtiva, dimensionamento de atuadores ajuste dos controladores, carregamentos para FEM, etc ...
EESC-USP © M. Becker 2008 20/77
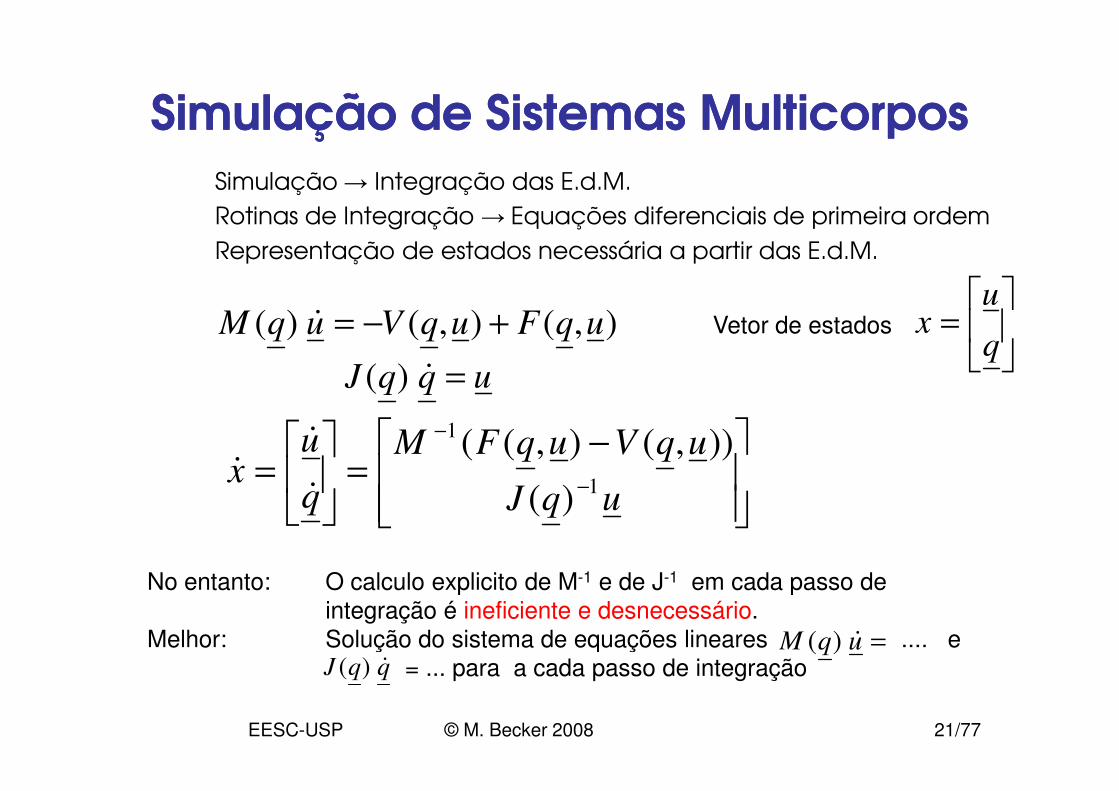
Simulação de Sistemas MulticorposSimulação de Sistemas MulticorposSimulação → Integração das E.d.M.Rotinas de Integração → Equações diferenciais de primeira ordem Representação de estados necessária a partir das E.d.M.
uqqJ
uqFuqVuqM
=
+−=
&
&
)(
),(),()(
=
q
uxVetor de estados
−=
=
−
−
uqJ
uqVuqFM
q
ux
1
1
)(
)),(),((
&
&&
=uqM &)(
No entanto: O calculo explicito de M-1 e de J-1 em cada passo de integração é ineficiente e desnecessário.
Melhor: Solução do sistema de equações lineares .... e = ... para a cada passo de integraçãoqqJ &)(
EESC-USP © M. Becker 2008 21/77
Composição do Modelo
Dedução das Equações deMovimento com auxilio do
Computador
Geração do Programa
Eng
enhe
iroA
utol
ev
Composição do Modelo
Dedução das Equações deMovimento com auxilio do
Computador
Geração do Programa
Eng
enhe
iroA
utol
ev
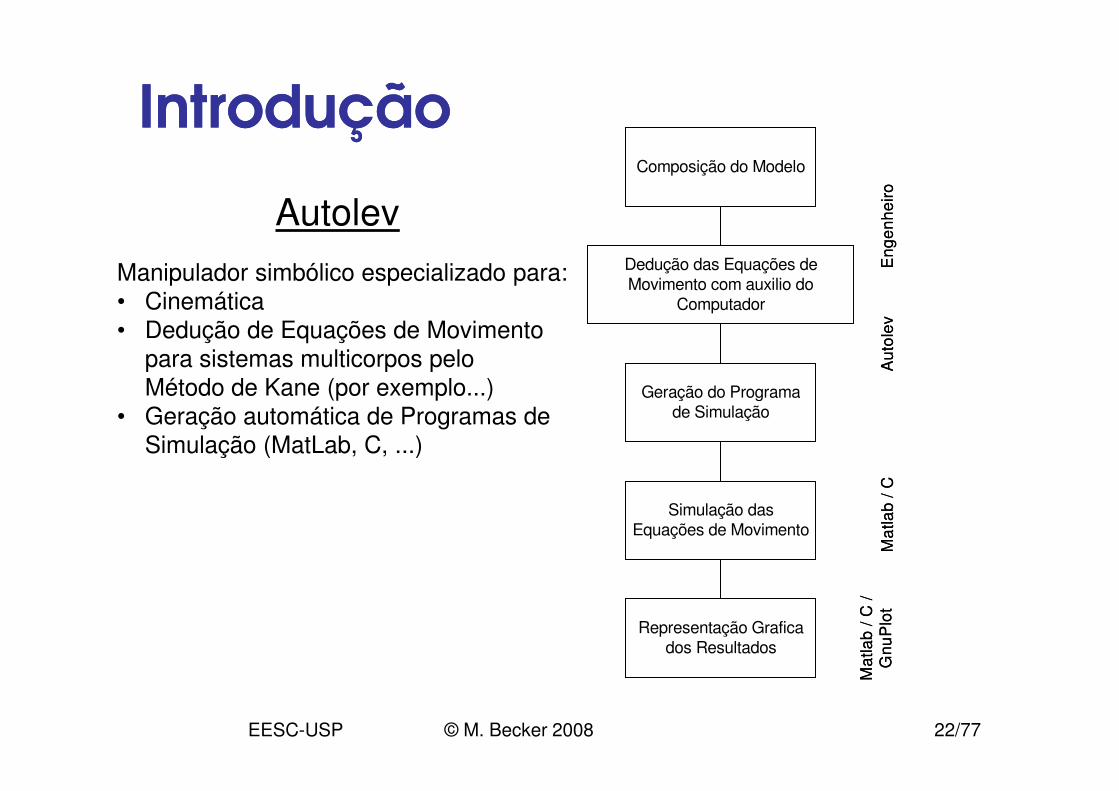
Manipulador simbólico especializado para:• Cinemática• Dedução de Equações de Movimento
para sistemas multicorpos pelo Método de Kane (por exemplo...)
Autolev
IntroduçãoIntrodução
Geração do Programade Simulação
Simulação dasEquações de Movimento
Representação Graficados Resultados
Mat
lab
/ CM
atla
b /
C /
Gnu
Plo
t
Geração do Programade Simulação
Simulação dasEquações de Movimento
Representação Graficados Resultados
Mat
lab
/ CM
atla
b /
C /
Gnu
Plo
t
Método de Kane (por exemplo...)• Geração automática de Programas de
Simulação (MatLab, C, ...)
EESC-USP © M. Becker 2008 22/77
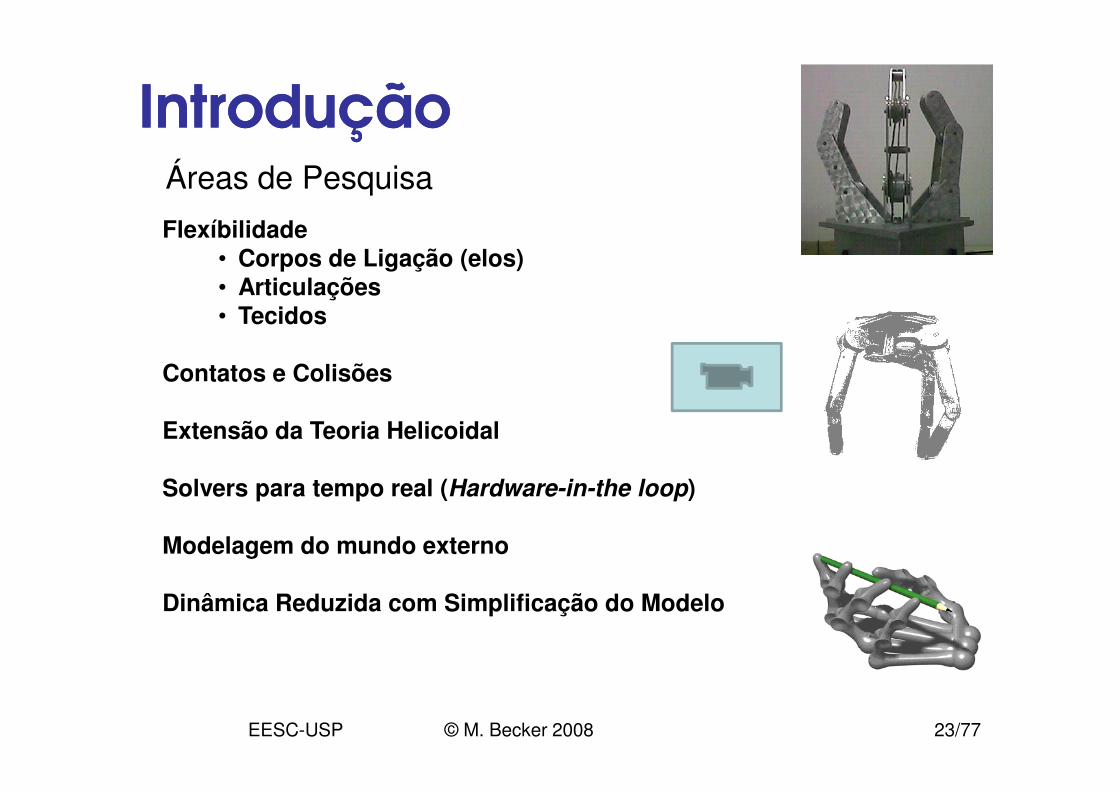
Flexíbilidade • Corpos de Ligação (elos)• Articulações • Tecidos
Contatos e Colisões
Áreas de Pesquisa
IntroduçãoIntrodução
Extensão da Teoria Helicoidal
Solvers para tempo real (Hardware-in-the loop)
Modelagem do mundo externo
Dinâmica Reduzida com Simplificação do Modelo
EESC-USP © M. Becker 2008 23/77

•• IntroduçãoIntrodução
•• Método Método NewtonNewton--EulerEuler
• Método de Krane
Sumário da AulaSumário da Aula
• Método de Krane
• Exemplo de Aplicação
• Exercícios Recomendados
• Bibliografia Recomendada
EESC-USP © M. Becker 2008 24/77
Método NewtonMétodo Newton--EulerEuler
• “Produto final” do Método de Newton-Euler:
– Equações diferenciais de movimento– Equações diferenciais de movimento– Reações dinâmicas (forças e torques)
EESC-USP © M. Becker 2008 25/77

• Equacionamento:
Método NewtonMétodo Newton--EulerEuler
Massa total do link i.Posição do Centro de Massa do link i com relação ao sistema inercial.Posição do Centro de Massa do link i com relação à origem do sistema (x , y , z ).link i
(xi-1, yi-1, zi-1) →
→
→
i
i
i
s
r
m
relação à origem do sistema (xi, yi, zi).Origem do iésimo sistema de coordenadas comrelação ao iésimo -1 sistema.
Velocidade linear do Centro de Massa do link i
Aceleração linear do Centro de Massa do link i
Força externa total aplicada no centro de massa do link i.
x0y0
z0
link i
ri
link i-1
link i+1
si
pi*
pi
(xi, yi, zi)
→
→=
→=
→
→
i
ii
ii
i
i
F
dt
vda
dt
drv
p
s
*
EESC-USP © M. Becker 2008 26/77

• Equacionamento:
Método NewtonMétodo Newton--EulerEuler
Momento externo total aplicado no centro demassa do link i.
Matriz de inércia com relação ao sistema inercial.link i →
→
i
i
I
N
inercial.
Força exercida no link i pelo link i-1, no sistema(xi-1, yi-1, zi-1) para suportar o link i eos demais links “acima” dele.
Momento exercido no link i pelo link i-1, no sistema(xi-1, yi-1, zi-1).
x0y0
z0
link i
ri
link i-1
link i+1
si
pi*
pi
EESC-USP © M. Becker 2008 27/77
→
→
→
i
i
i
n
f
I

• Desconsiderando atritos viscosos nas juntas, tem-se:
Método NewtonMétodo Newton--EulerEuler
iiii
i amdt
vmdF ==
)(
)(Id ω
Onde:
EESC-USP © M. Becker 2008
)()(
iiiiiii
i IIdt
IdN ωωω
ω×+== &
+××+
×+×+
+××+×
=
−
−−
−
1
*
1
*
1
1
**
)(
)(2
)(
iiii
iiiiiii
iiiiii
i
vp
qzpqz
vpp
v
&
&&&&
&&
&
ωω
ωω
ωωω
28/77
• Com relação às forças e momentos externos exercidos no link i, tem-se:
E:
Método NewtonMétodo Newton--EulerEuler
1+−= iii ffF
111)()(
+−+×−−×−+−= iiiiiiii frpfrpnnN
• Essas equações podem ser rescritas na forma de equações recursivas pois:
EESC-USP © M. Becker 2008
1
*
11)(
+−+×−×−+−= iiiiiii fpFrpnn
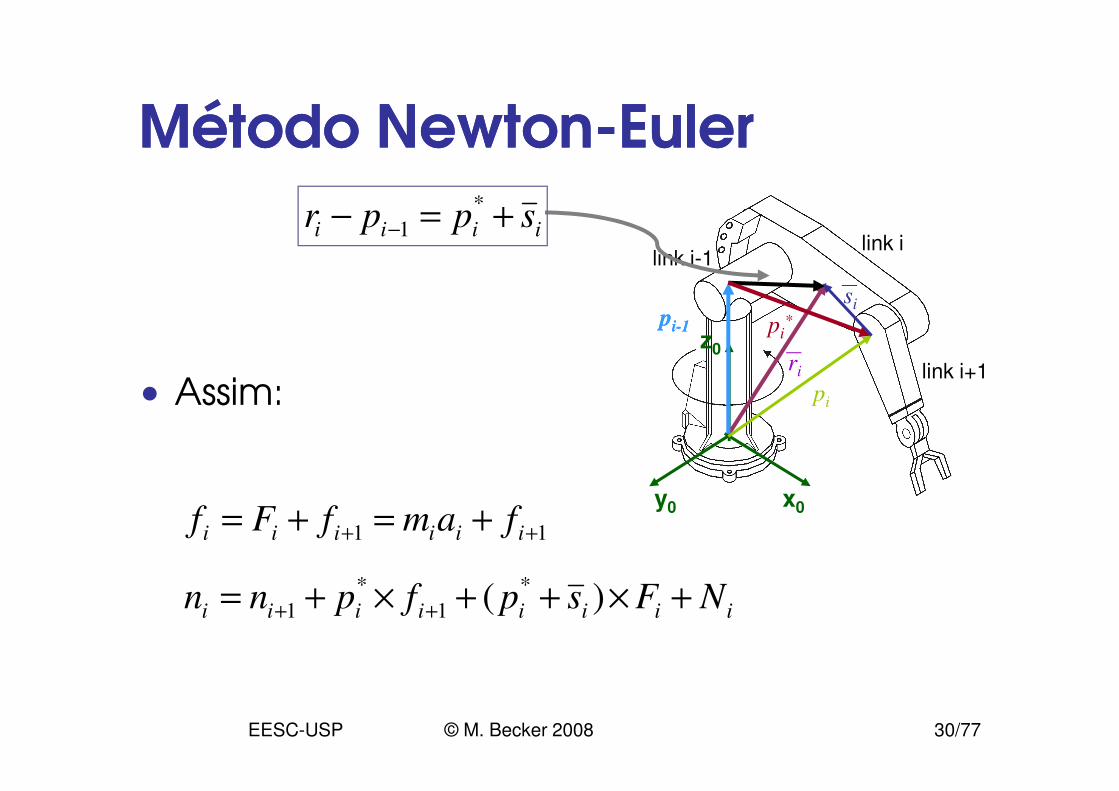
iiii sppr +=− −
*
1
29/77
z0
link i
ri
link i-1
link i+1
si
pi*
pi• Assim:
Método NewtonMétodo Newton--EulerEuler
ppii--11
iiii sppr +=− −
*
1
x0y0
pi• Assim:
EESC-USP © M. Becker 2008
11 ++ +=+= iiiiii famfFf
iiiiiiii NFspfpnn +×++×+=++
)(*
1
*
1
30/77
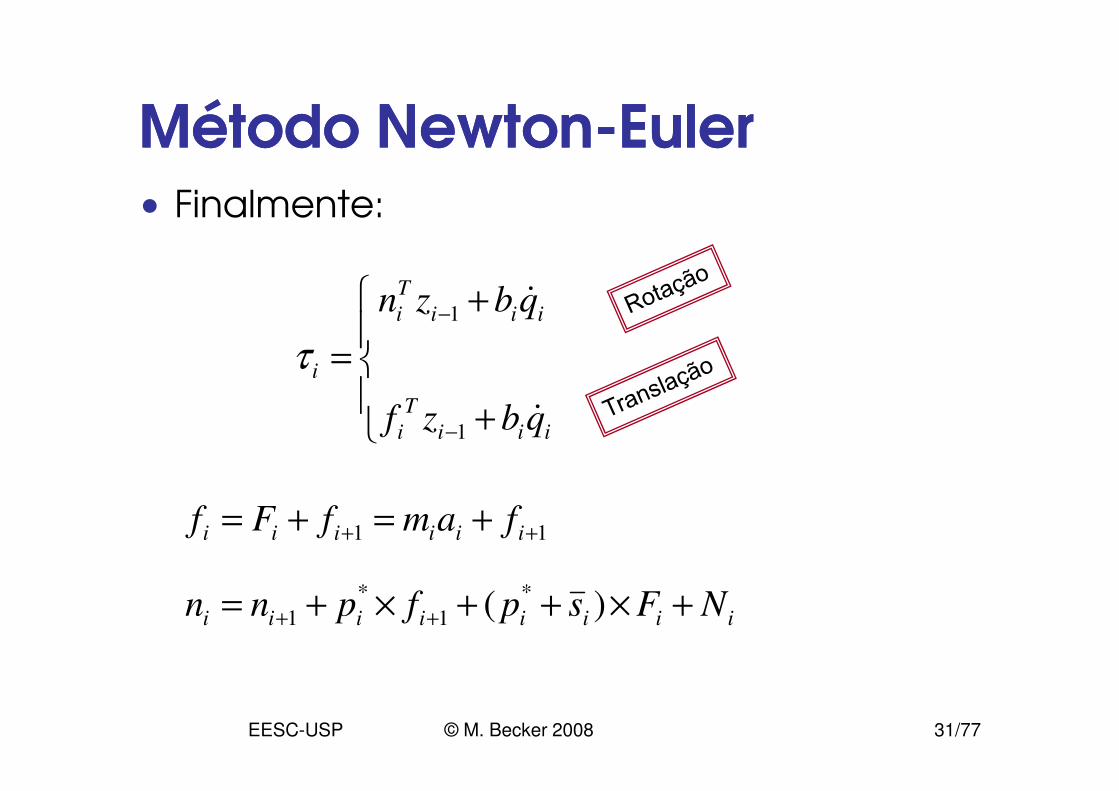
• Finalmente:
Método NewtonMétodo Newton--EulerEuler
+
+
=
−
T
iii
T
i
i
qbzn &1
τ
EESC-USP © M. Becker 2008
11 ++ +=+= iiiiii famfFf
iiiiiiii NFspfpnn +×++×+= ++ )(*
1
*
1
+− iii
T
i qbzf &1
31/77
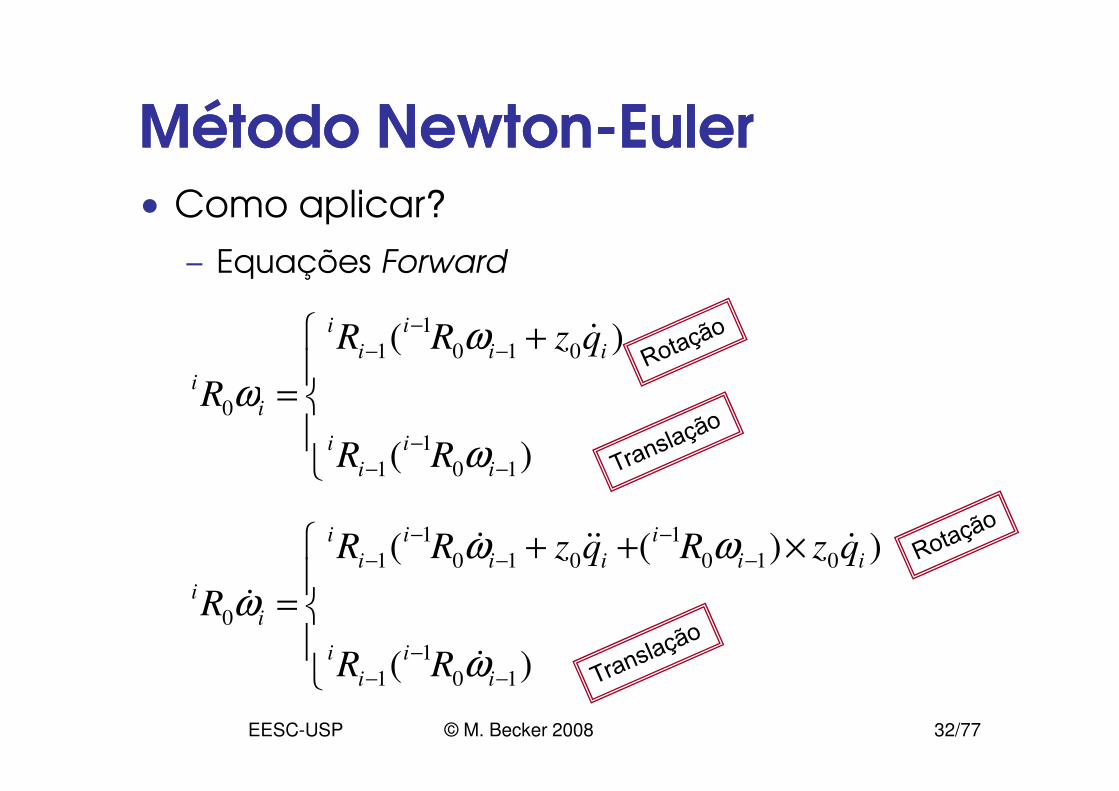
• Como aplicar?
– Equações Forward
Método NewtonMétodo Newton--EulerEuler
+
=
−
−
−)(
010
1
1
0
ii
i
i
i
i
i
qzRR
R
ω
ω
&
EESC-USP © M. Becker 2008
=
−
−
− )( 10
1
1
0
i
i
i
i
i
RR
R
ω
ω
×++
=
−
−
−
−
−
−
−
−
)(
))((
10
1
1
010
1
010
1
1
0
i
i
i
i
ii
i
ii
i
i
i
i
i
RR
qzRqzRR
R
ω
ωω
ω
&
&&&&
&
32/77
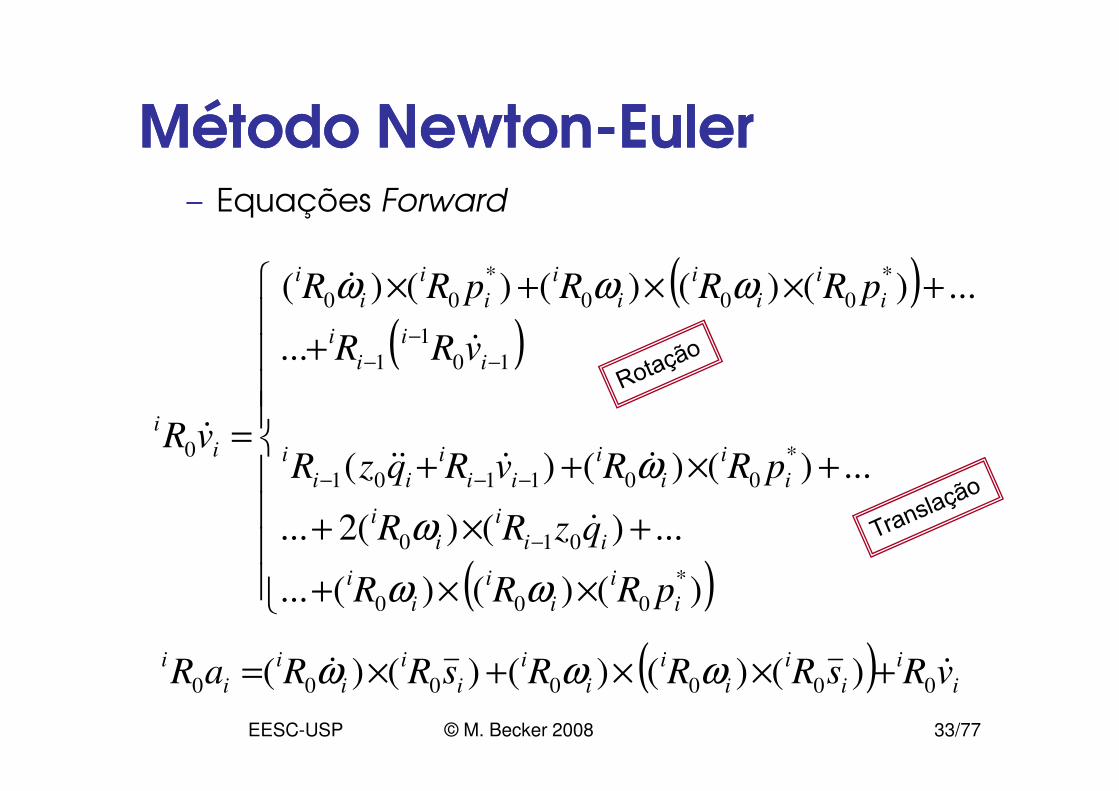
– Equações Forward
Método NewtonMétodo Newton--EulerEuler
( )( )
+
+××+×
−
−
−...
...)()()()()(
10
1
1
*
000
*
00
i
i
i
i
i
i
i
i
i
i
i
i
i
i
vRR
pRRRpRR ωωω
&
&
EESC-USP © M. Becker 2008
( )
××+
+×+
+×++=
−
−−−
)()()(...
...)()(2...
...)()()(
*
000
010
*
001101
0
i
i
i
i
i
i
ii
i
i
i
i
i
i
i
ii
i
ii
ii
i
pRRR
qzRR
pRRvRqzRvR
ωω
ω
ω
&
&&&&&
( ) i
i
i
i
i
i
i
i
i
i
i
i
i
ivRsRRRsRRaR &&
0000000 )()()()()( +××+×= ωωω
33/77
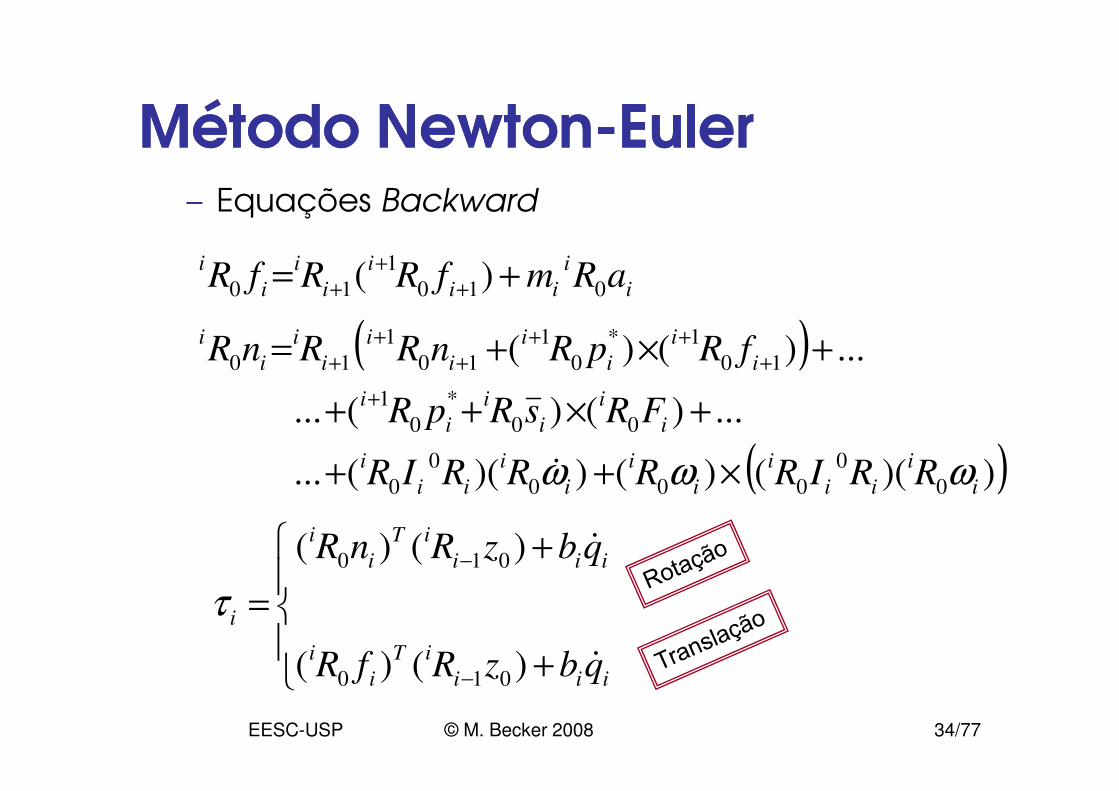
– Equações Backward
Método NewtonMétodo Newton--EulerEuler
i
i
ii
i
i
i
i
iaRmfRRfR 010
1
10 )( += +
+
+
( )...)()(...
...)()(
*1
10
1*
0
1
10
1
10
iii
i
i
i
i
i
i
i
i
i
i
FRsRpR
fRpRnRRnR
+×++
+×+=
+
+
++
+
+
+
EESC-USP © M. Becker 2008
+
+
=
−
−
iii
iT
i
i
iii
iT
i
i
i
qbzRfR
qbzRnR
&
&
)()(
)()(
010
010
τ
( )))(()())((...
...)()(...
0
0
000
0
0
00
*
0
1
i
i
ii
i
i
i
i
i
ii
i
i
i
i
i
i
i
RRIRRRRIR
FRsRpR
ωωω ×++
+×+++
&
34/77
• Equações Forward e Backward
– Em geral, as condições iniciais são:
Método Método NewtonNewton--EulerEuler
0000 === vωω &
EESC-USP © M. Becker 2008
( )Tzyx gggv ,,
0=&
35/77
•• IntroduçãoIntrodução
•• Método Método NewtonNewton--EulerEuler
•• Método de Método de KraneKrane
Sumário da AulaSumário da Aula
•• Método de Método de KraneKrane
• Exemplo de Aplicação
• Exercícios Recomendados
• Bibliografia Recomendada
EESC-USP © M. Becker 2008 36/77
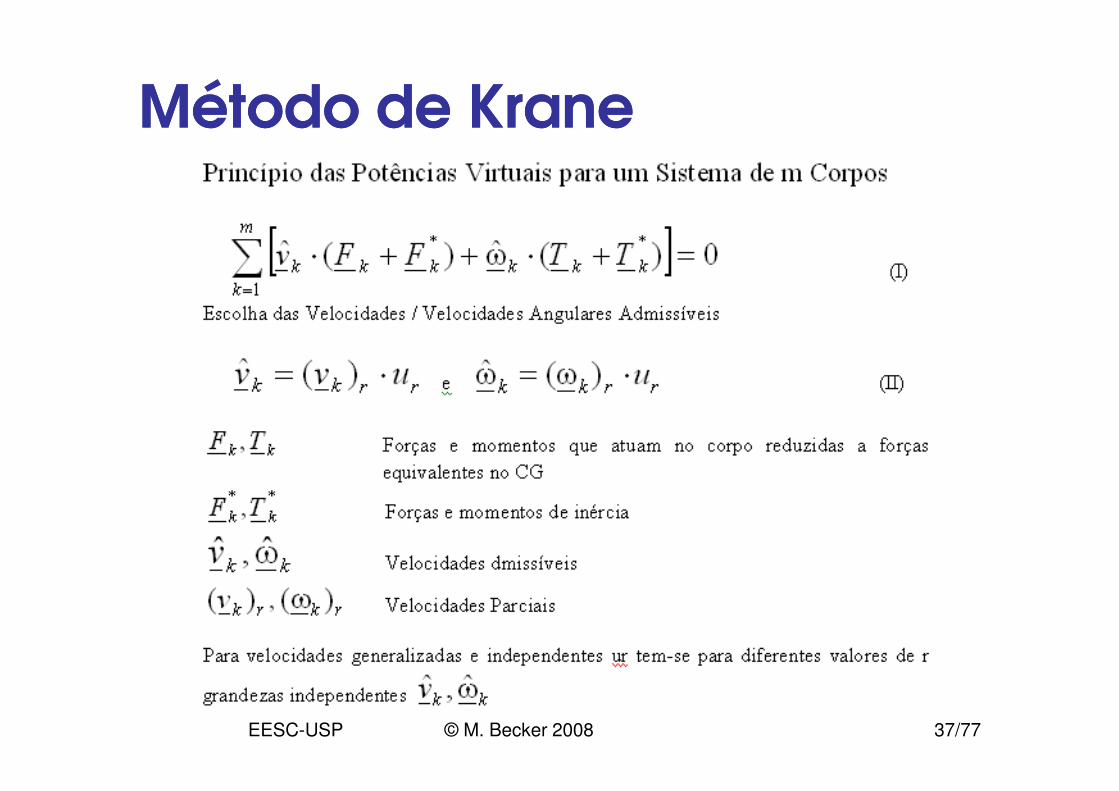
Método de Método de KraneKrane
EESC-USP © M. Becker 2008 37/77
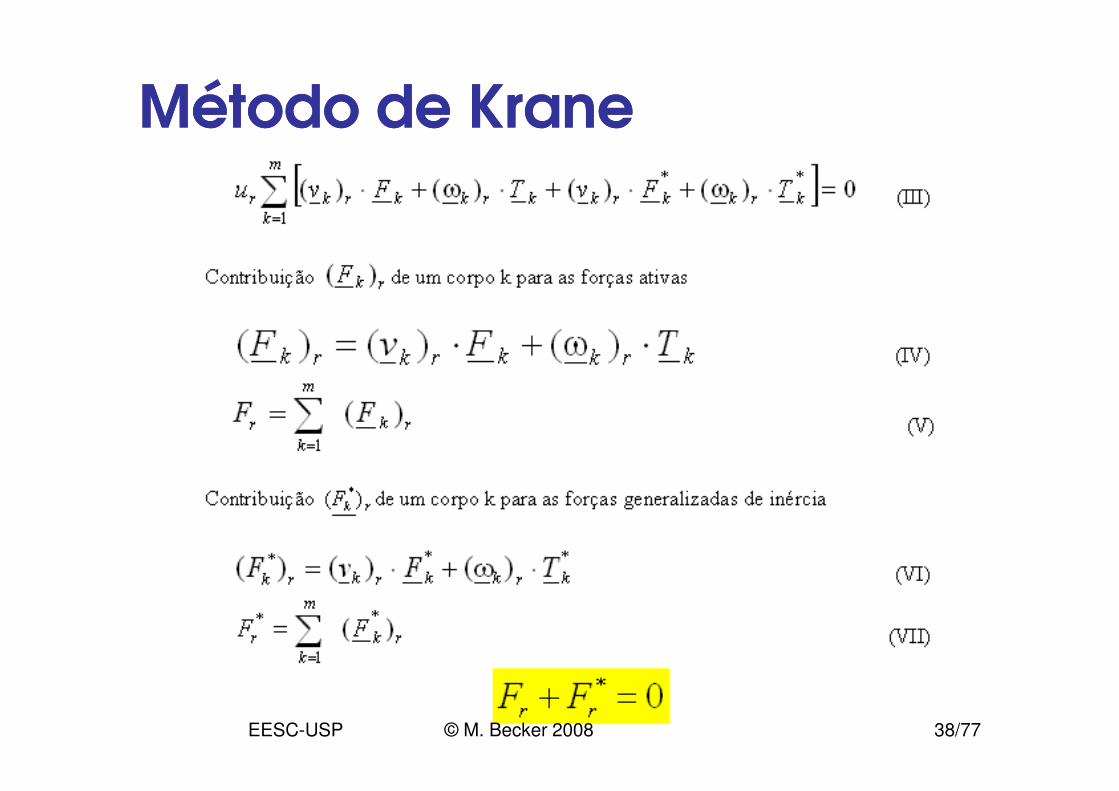
Método de Método de KraneKrane
EESC-USP © M. Becker 2008 38/77

1. Escolha n coordenadas generalizadas qr(r = 1,..., n),2. Escolha n velocidades generalizadas ur(r = 1,..., n),
),(),(1
tqbqtqau ri
r
i
rir +=∑=
&
Método de Método de KraneKraneNa forma de Algoritmo...
3. Velocidades angulares absolutas wA, wB, ...e as velocidades absolutas vA, vB,...
4. Tabela das velocidades angulares parciais (wA)r, (wB)r , ......e das velocidades parciais (vA)r, (vB)r , ... (r=1,...,n).
5. Acelerações angulares absolutas αA, αB, ... e acelerações absolutas aA, aB, ......
∑=
ω+ω=ωr
r
rErEE u1
0 )()( ∑=
+=r
r
rErEE vuvv1
0 )()(
EESC-USP © M. Becker 2008 39/77
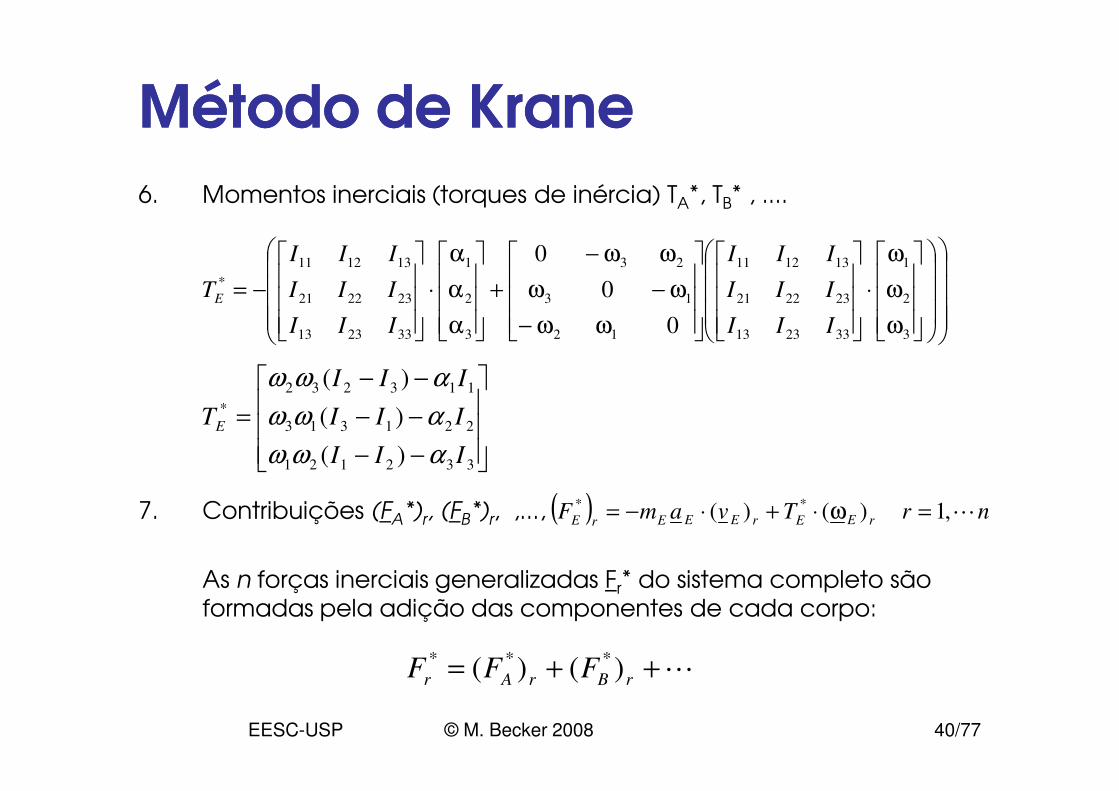
6. Momentos inerciais (torques de inércia) TA*, TB* , ....
−−
113232)( III αωω
ω
ω
ω
⋅
ωω−
ω−ω
ωω−
+
α
α
α
⋅
−=
3
2
1
332313
232221
131211
12
13
23
3
2
1
332313
232221
131211
*
0
0
0
III
III
III
III
III
III
TE
Método de Método de KraneKrane
7. Contribuições (FA*)r, (FB*)r, ,...,
As n forças inerciais generalizadas Fr* do sistema completo são formadas pela adição das componentes de cada corpo:
−−
−−=
332121
221313
113232
*
)(
)(
III
IIITE
αωω
αωω
( ) nrTvamF rEErEEErE L,1)()(**
=ω⋅+⋅−=
L++= rBrAr FFF )()(***
EESC-USP © M. Becker 2008 40/77
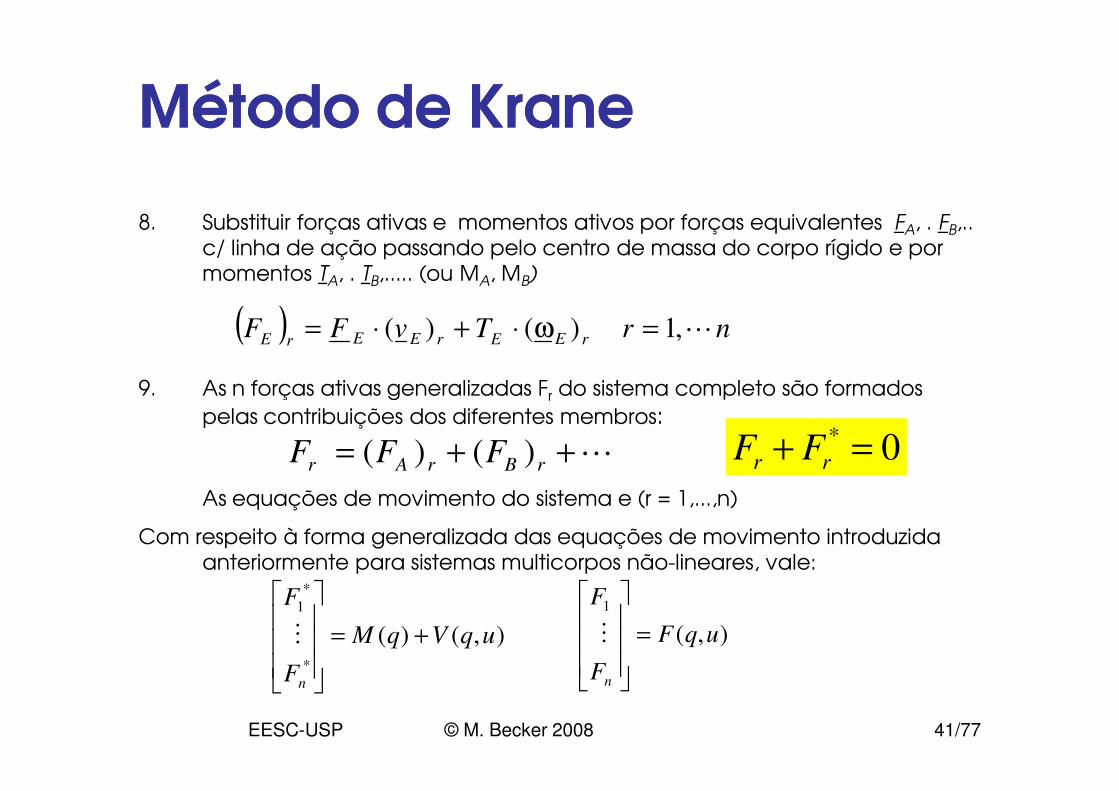
8. Substituir forças ativas e momentos ativos por forças equivalentes FA, . FB,.. c/ linha de ação passando pelo centro de massa do corpo rígido e por momentos TA, . TB,..... (ou MA, MB)
9. As n forças ativas generalizadas Fr do sistema completo são formados
( ) nrTvFF rEErEErE L,1)()( =ω⋅+⋅=
Método de Método de KraneKrane
9. As n forças ativas generalizadas Fr do sistema completo são formados pelas contribuições dos diferentes membros:
As equações de movimento do sistema e (r = 1,...,n)
Com respeito à forma generalizada das equações de movimento introduzida anteriormente para sistemas multicorpos não-lineares, vale:
L++= rBrAr FFF )()( 0*
=+ rr FF
),()(*
*
1
uqVqM
F
F
n
+=
M ),(
1
uqF
F
F
n
=
M
EESC-USP © M. Becker 2008 41/77
•• IntroduçãoIntrodução
•• Método Método NewtonNewton--EulerEuler
•• Método de Método de KraneKrane
Sumário da AulaSumário da Aula
•• Método de Método de KraneKrane
•• Exemplo de AplicaçãoExemplo de Aplicação
• Exercícios Recomendados
• Bibliografia Recomendada
EESC-USP © M. Becker 2008 42/77
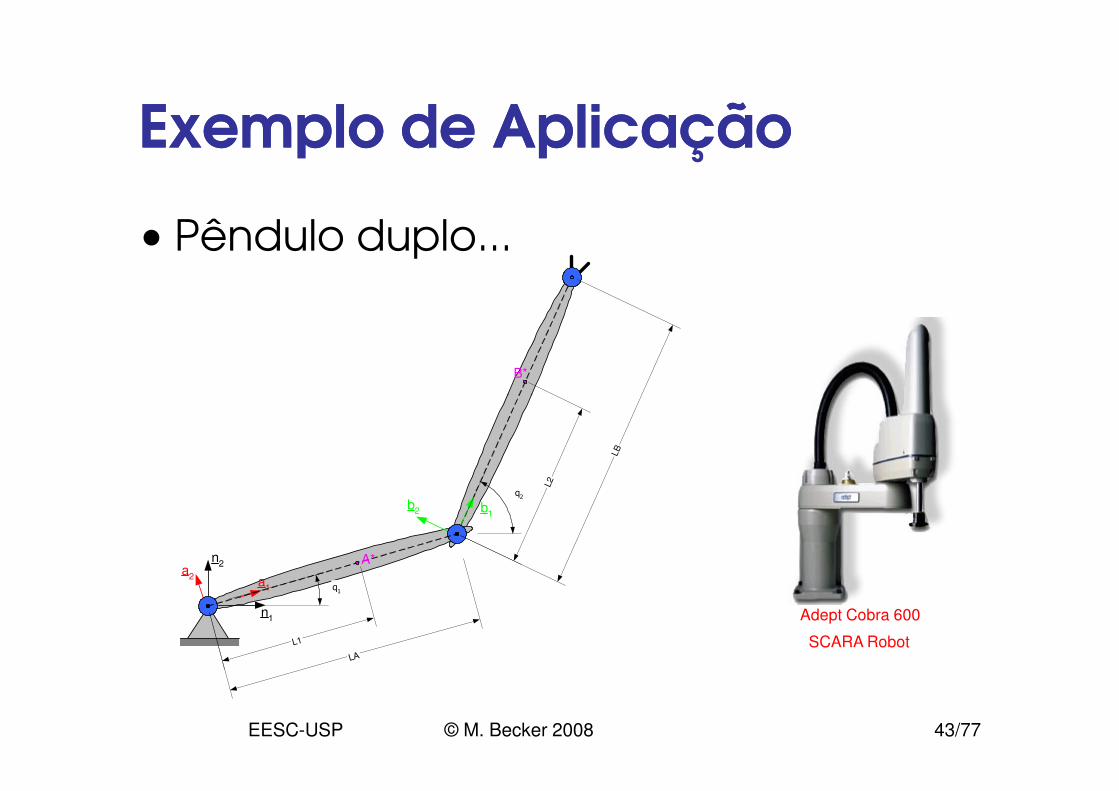
Exemplo de AplicaçãoExemplo de Aplicação
• Pêndulo duplo...
B*
EESC-USP © M. Becker 2008
Adept Cobra 600
SCARA Robot
n1
n2
a1
a2
b1b2
q1
q2
LA
L1
A*
LB
L2
43/77
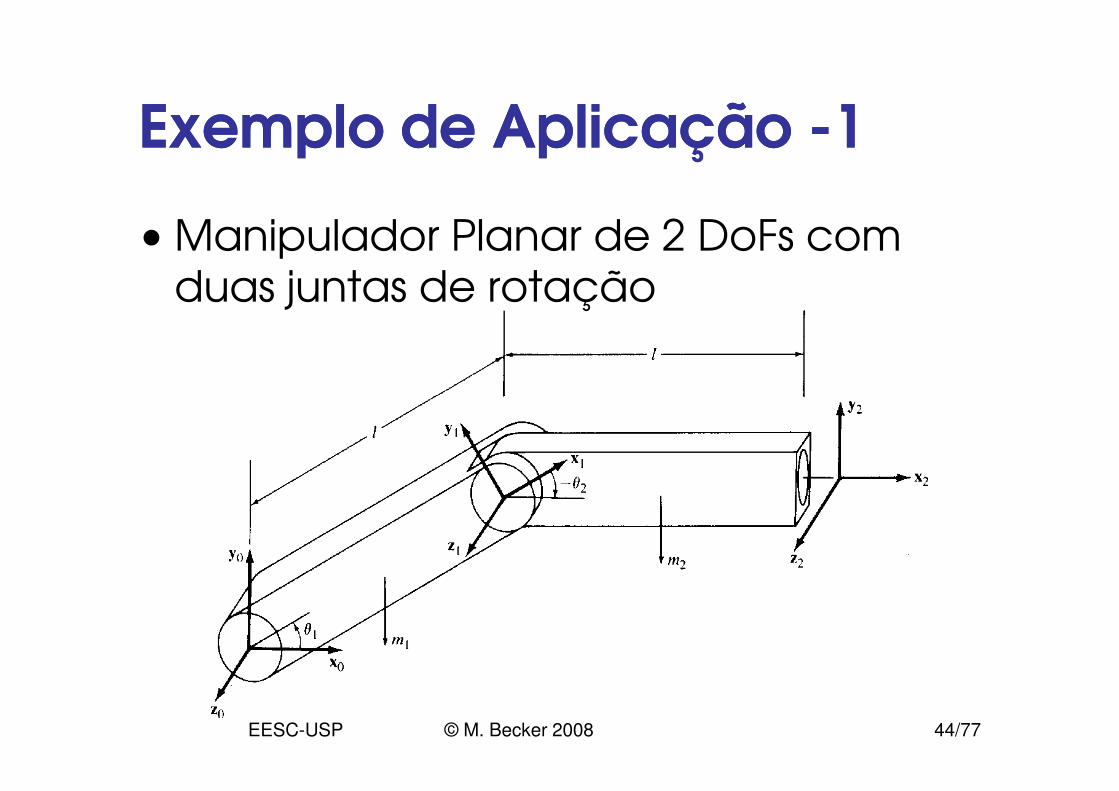
Exemplo de Aplicação Exemplo de Aplicação --11
• Manipulador Planar de 2 DoFs com duas juntas de rotação
EESC-USP © M. Becker 2008 44/77
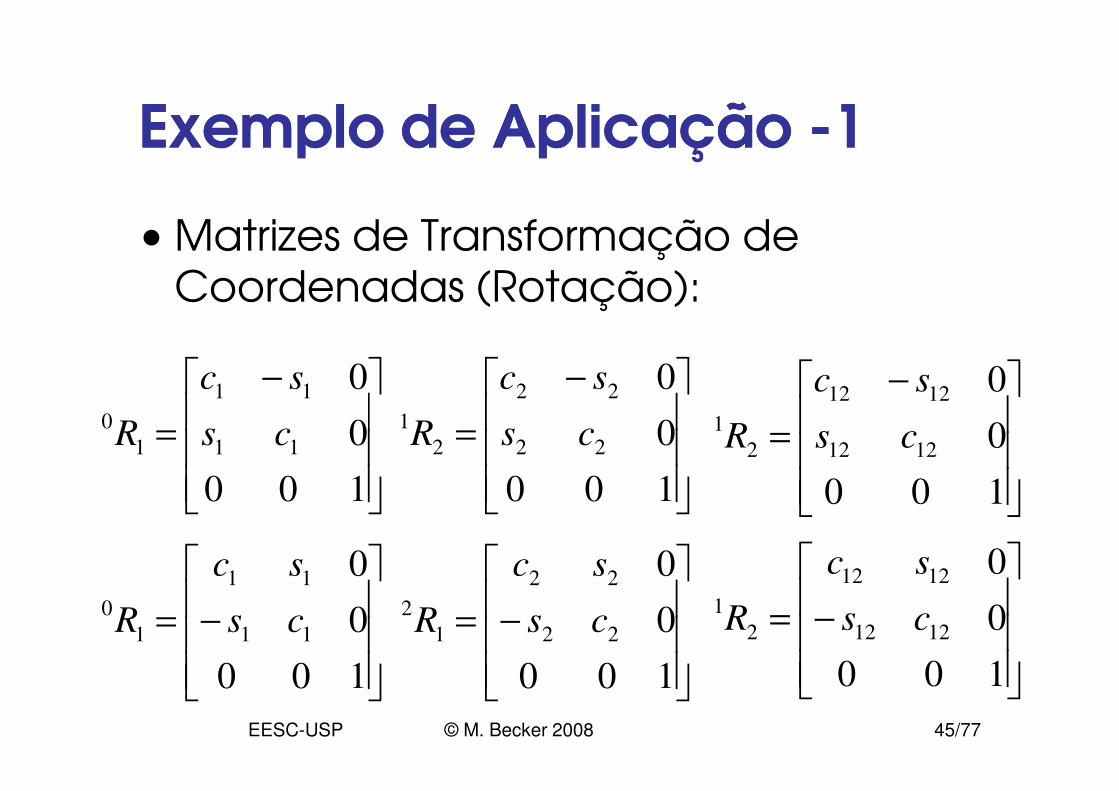
Exemplo de Aplicação Exemplo de Aplicação --11
• Matrizes de Transformação de Coordenadas (Rotação):
− 0
11sc
− 0
22sc
− 0
1212sc
EESC-USP © M. Becker 2008
−
=
100
0
0
11
11
1
0cs
sc
R
−
=
100
0
0
22
22
2
1cs
sc
R
−
=
100
0
0
1212
1212
2
1cs
sc
R
−=
100
0
0
22
22
1
2cs
sc
R
−=
100
0
0
11
11
1
0cs
sc
R
−=
100
0
0
1212
1212
2
1cs
sc
R
45/77
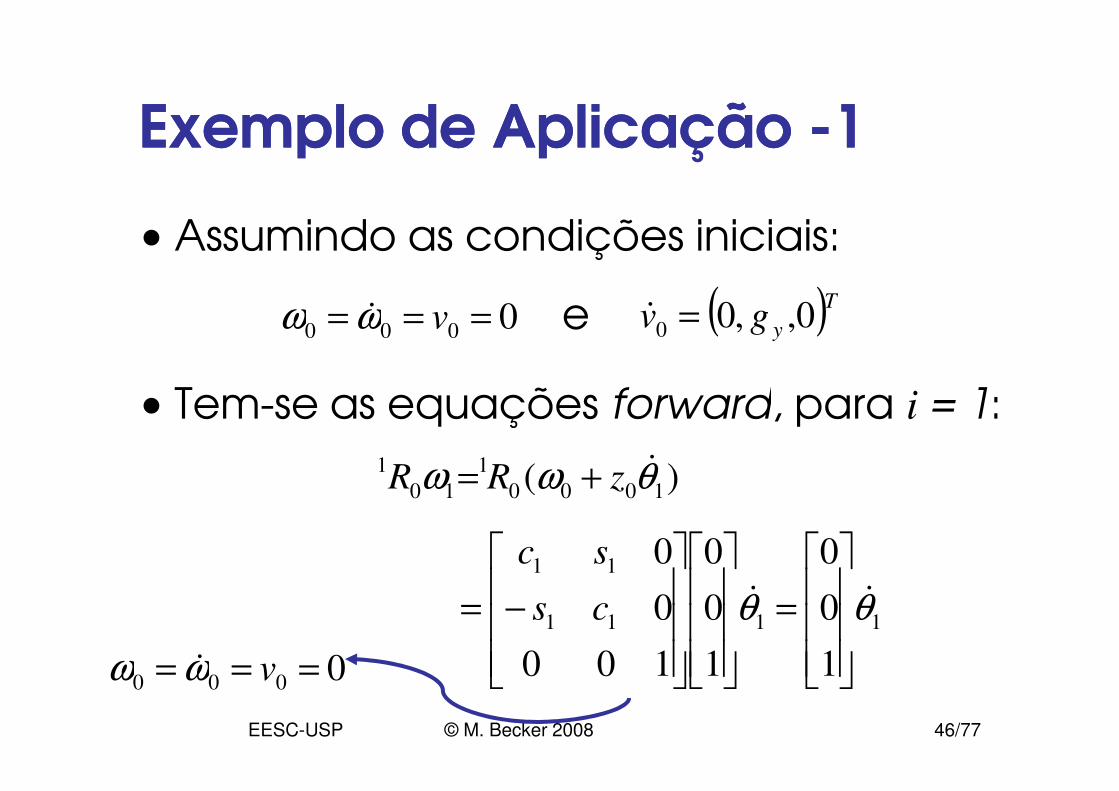
Exemplo de Aplicação Exemplo de Aplicação --11
• Assumindo as condições iniciais:
• Tem-se as equações forward, para i = 1:
e0000 === vωω & ( )Tygv 0,,0
0=&
• Tem-se as equações forward, para i = 1:
EESC-USP © M. Becker 2008
1111
11
1
0
0
1
0
0
100
0
0
θθ &&
=
−= cs
sc
)(1000
1
10
1 θωω &zRR +=
0000 === vωω &
46/77
Exemplo de Aplicação Exemplo de Aplicação --11
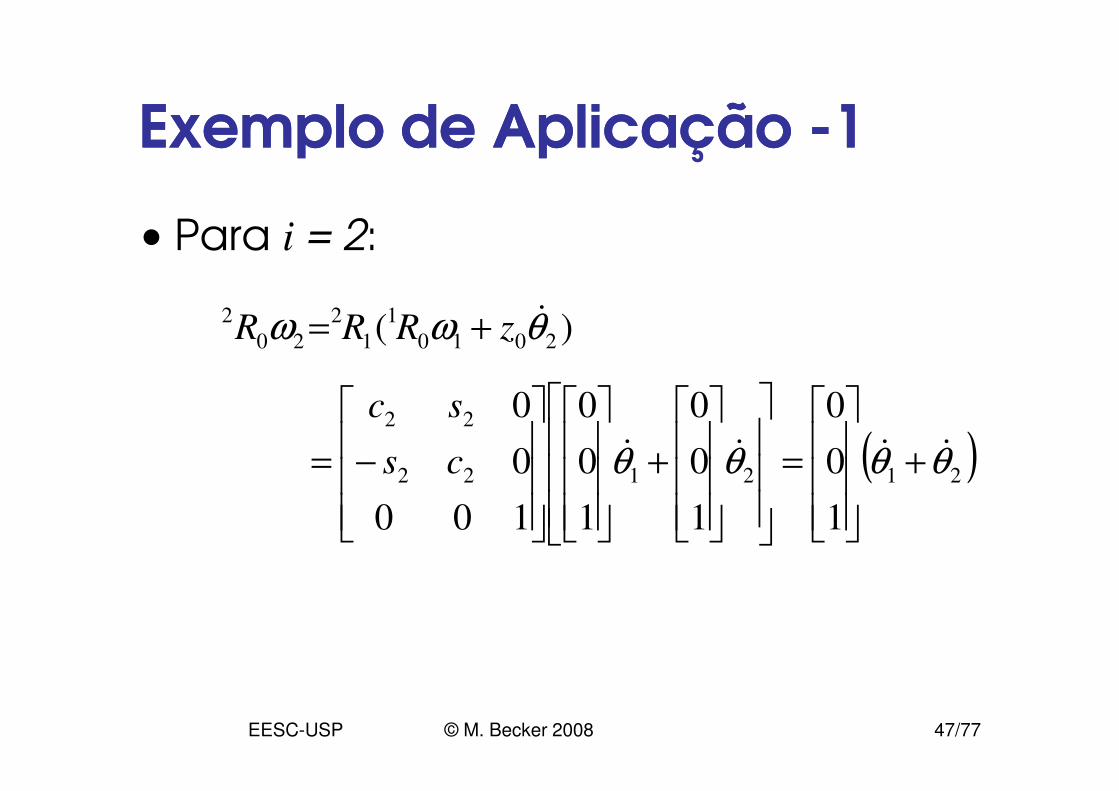
• Para i = 2:
0000 sc
)( 2010
1
1
2
20
2 θωω &zRRR +=
EESC-USP © M. Becker 2008
( )212122
22
1
0
0
1
0
0
1
0
0
100
0
0
θθθθ &&&& +
=
+
−= cs
sc
47/77
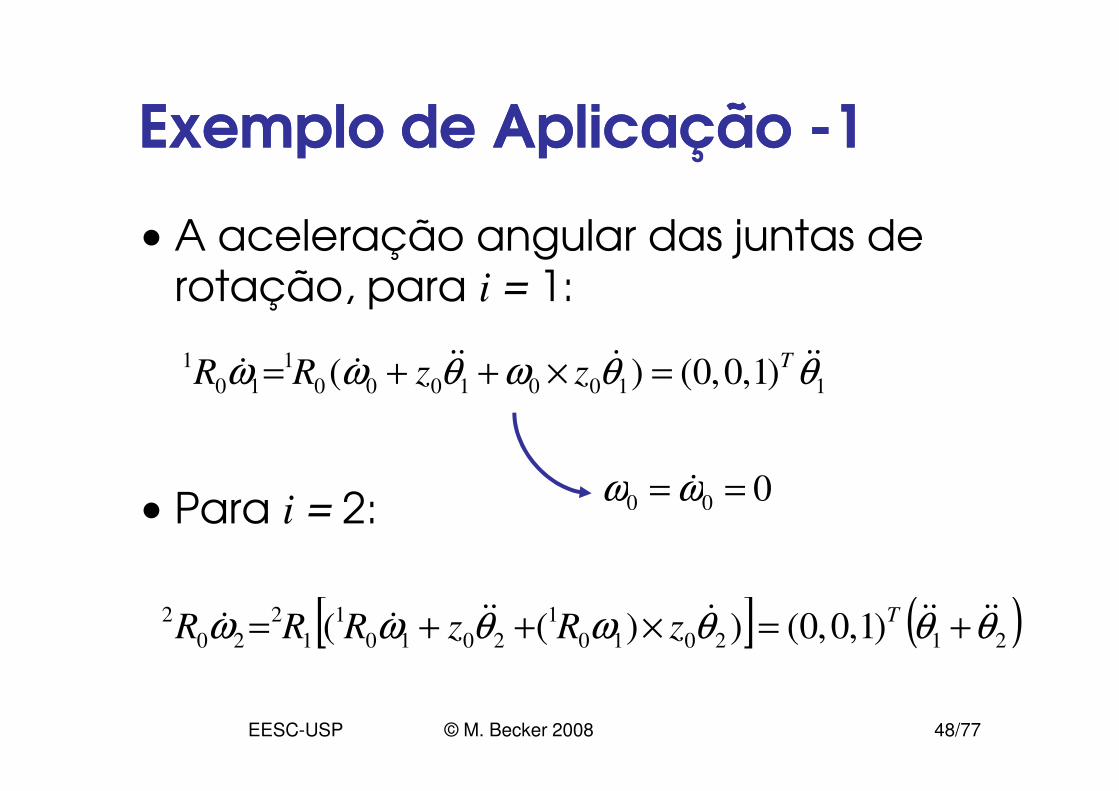
Exemplo de Aplicação Exemplo de Aplicação --11
• A aceleração angular das juntas de rotação, para i = 1:
11001000
1
10
1)1,0,0()( θθωθωω &&&&&&& T
zzRR =×++=
• Para i = 2:
EESC-USP © M. Becker 2008
1100100010
000 == ωω &
[ ] ( )212010
1
2010
1
1
2
20
2)1,0,0())(( θθθωθωω &&&&&&&&& +=×++=
TzRzRRR
48/77
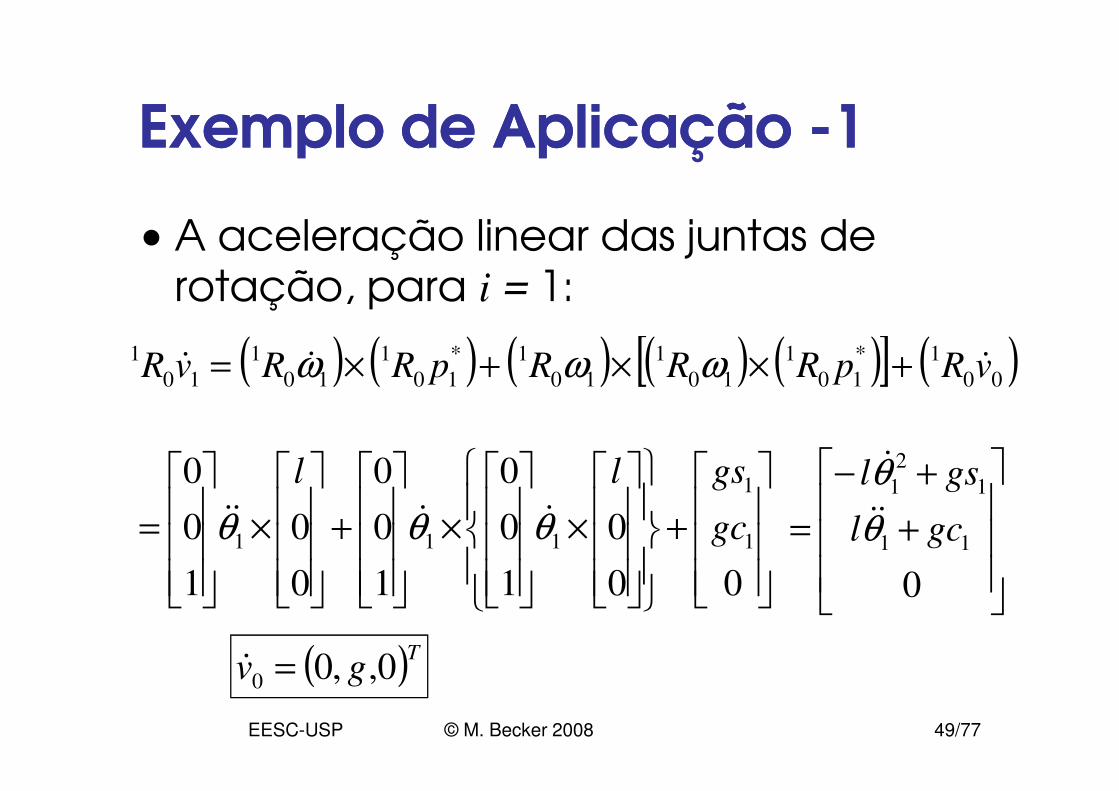
Exemplo de Aplicação Exemplo de Aplicação --11
• A aceleração linear das juntas de rotação, para i = 1:
( ) ( ) ( ) ( ) ( )[ ] ( )00
1*
10
1
10
1
10
1*
10
1
10
1
10
1 vRpRRRpRRvR &&& +××+×= ωωω
EESC-USP © M. Becker 2008 49/77
+
×
×
+
×
=
00
0
1
0
0
1
0
0
0
0
1
0
0
1
1
111gc
gsll
θθθ &&&&
+
+−
=
0
11
1
2
1
gcl
gsl
θ
θ
&&
&
( )Tgv 0,,0
0=&
Exemplo de Aplicação Exemplo de Aplicação --11
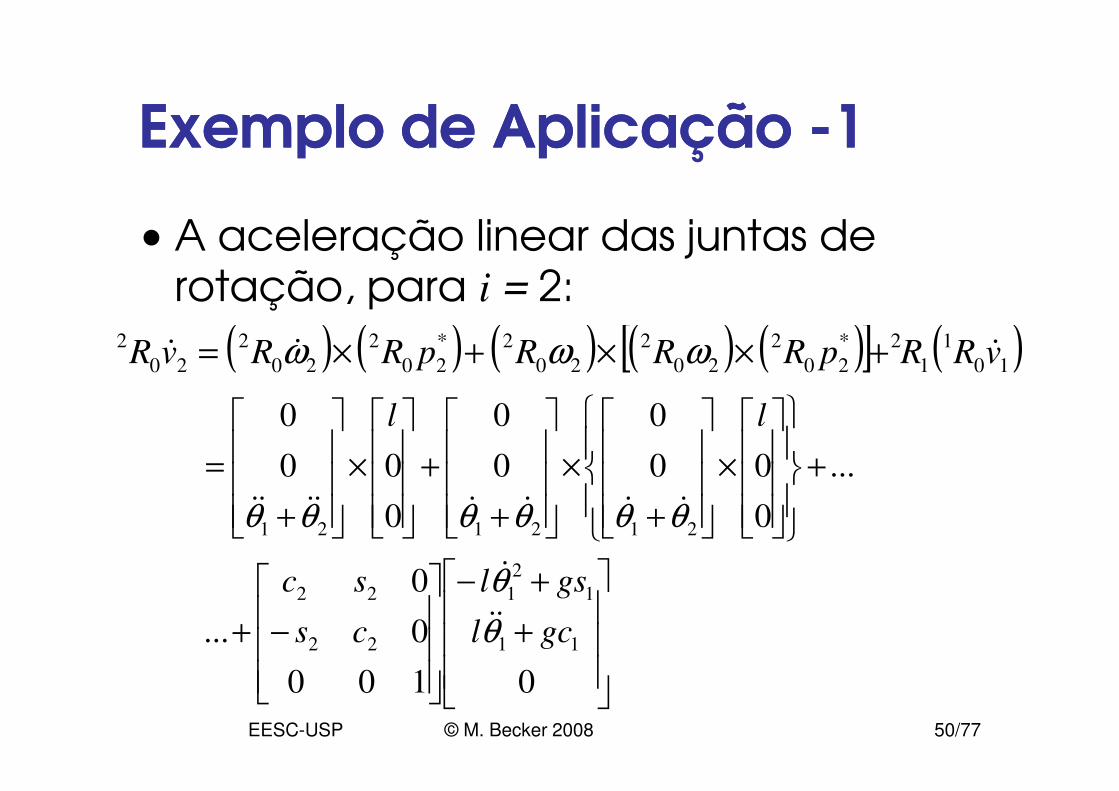
• A aceleração linear das juntas de rotação, para i = 2:
( ) ( ) ( ) ( ) ( )[ ] ( )10
1
1
2*
20
2
20
2
20
2*
20
2
20
2
20
2vRRpRRRpRRvR &&& +××+×= ωωω
000
EESC-USP © M. Becker 2008 50/77
+
+−
−+
+
×
+
×
+
+
×
+
=
0100
0
0
...
...
0
00
0
0
0
0
00
0
11
1
2
1
22
22
212121
gcl
gsl
cs
sc
ll
θ
θ
θθθθθθ
&&
&
&&&&&&&&

Exemplo de Aplicação Exemplo de Aplicação --11
• A aceleração linear das juntas de rotação, para i = 2:
( ) ( ) ( ) ( ) ( )[ ] ( )10
1
1
2*
20
2
20
2
20
2*
20
2
20
2
20
2vRRpRRRpRRvR &&& +××+×= ωωω
EESC-USP © M. Becker 2008 51/77
( )( )
++++
+−−−−−
=
0
2
12
2
121221
1221
2
2
2
1
2
1212
gcscl
gscsl
θθθθ
θθθθθθ
&&&&&&&
&&&&&&&

Exemplo de Aplicação Exemplo de Aplicação --11
• A aceleração linear do centro de massa, para i = 1:
( ) ( ) ( ) ( ) ( )[ ] ( )10
1
10
1
10
1
10
1
10
1
10
1
10
1vRsRRRsRRaR && +××+×= ωωω
Onde:
EESC-USP © M. Becker 2008 52/77
−
−
=
02
12
1
1
1
1 ls
lc
s
−
=
−
−
−=
0
02
02
12
1
100
0
0
1
1
11
11
10
1
l
ls
lc
cs
sc
sR

Exemplo de Aplicação Exemplo de Aplicação --11
• A aceleração linear do centro de massa, para i = 1:
−
−
200
20 ll
EESC-USP © M. Becker 2008 53/77
+
+−
=
+
+−
+
+
×
×
+
×
=
02
2
0
...
...
0
02
00
0
02
1
0
11
1
2
1
11
1
2
1
11
110
1
gcl
gsl
gcl
gsl
aR
θ
θ
θ
θ
θθ
θ
&&
&
&&
&
&&
&&

Exemplo de Aplicação Exemplo de Aplicação --11
• A aceleração linear do centro de massa, para i = 2:
( ) ( ) ( ) ( ) ( )[ ] ( )20
2
20
2
20
2
20
2
20
2
20
2
20
2vRsRRRsRRaR && +××+×= ωωω
Onde:
EESC-USP © M. Becker 2008 54/77
−
−
=
02
12
1
12
12
2 ls
lc
s
−
=
−
−
−=
0
02
02
12
1
100
0
0
12
12
1212
1212
20
2
l
ls
lc
cs
sc
sR

Exemplo de Aplicação Exemplo de Aplicação --11
• A aceleração linear do centro de massa, para i = 2:
+
−
×
×
+
−
×
=2
002
02
ll
EESC-USP © M. Becker 2008 55/77
( )( )
++++
+−−−−
+
+
×
+
×
+
+
×
+
=
0
2
...
...
0
02
00
0
02
0
12
2
121221
1221
2
2
2
1
2
1212
212121
20
2
gcscl
gscsl
aR
θθθθ
θθθθθθ
θθθθθθ
&&&&&&&
&&&&&&&
&&&&&&&&

Exemplo de Aplicação Exemplo de Aplicação --11
• A aceleração linear do centro de massa, para i = 2:
−
−
200
20 ll
EESC-USP © M. Becker 2008 56/77
( )( )
++++
+−−−−
+
+
−
×
+
×
+
+
−
×
+
=
0
2121
2121
...
...
0
02
0
0
0
0
0
02
0
0
12
2
121221
1221
2
2
2
1
2
1212
212121
20
2
gcscl
gscsl
aR
θθθθ
θθθθθθ
θθθθθθ
&&&&&&&
&&&&&&&
&&&&&&&&

Exemplo de Aplicação Exemplo de Aplicação --11
• Tem-se as equações backward para i = 1, 2 e sem carregamento externo:
• A força exercida no link, para i = 2: • A força exercida no link, para i = 2:
EESC-USP © M. Becker 2008 57/77

Exemplo de Aplicação Exemplo de Aplicação --11
• Para i = 1:
EESC-USP © M. Becker 2008 58/77

Exemplo de Aplicação Exemplo de Aplicação --11
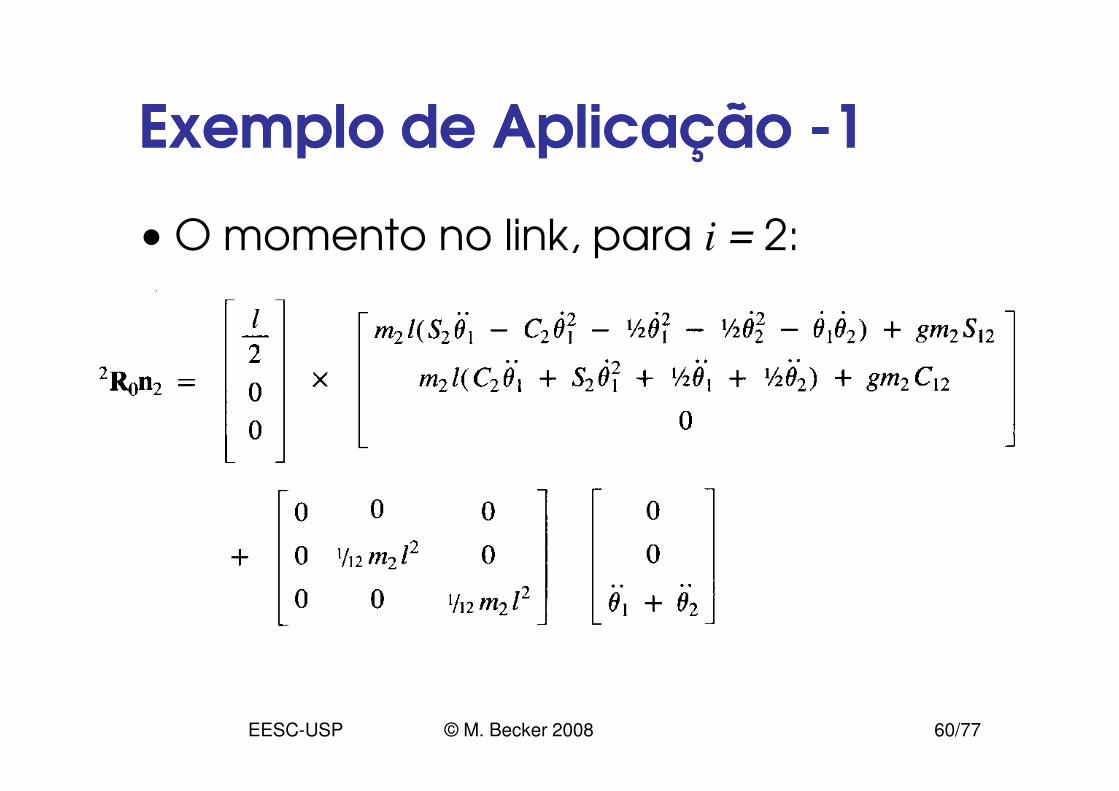
• O momento no link, para i = 2:
Onde:Onde:
EESC-USP © M. Becker 2008 59/77
Exemplo de Aplicação Exemplo de Aplicação --11
• O momento no link, para i = 2:
EESC-USP © M. Becker 2008 60/77
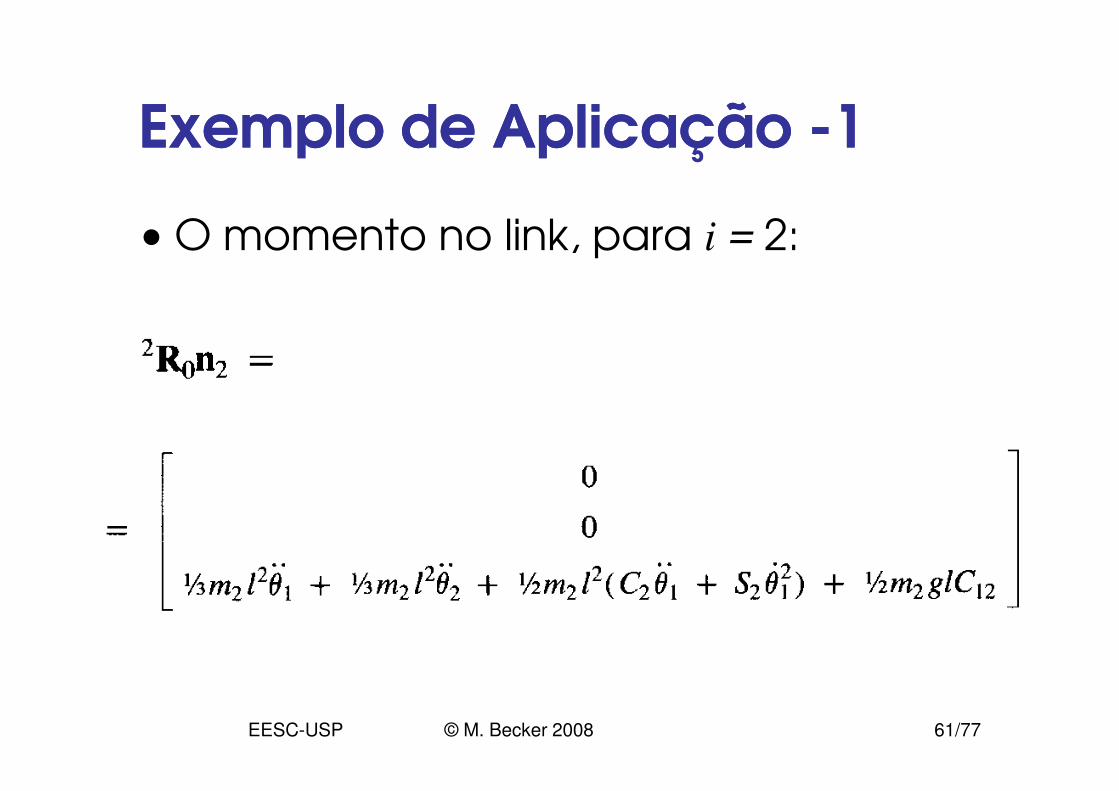
Exemplo de Aplicação Exemplo de Aplicação --11
• O momento no link, para i = 2:
EESC-USP © M. Becker 2008 61/77
Exemplo de Aplicação Exemplo de Aplicação --11
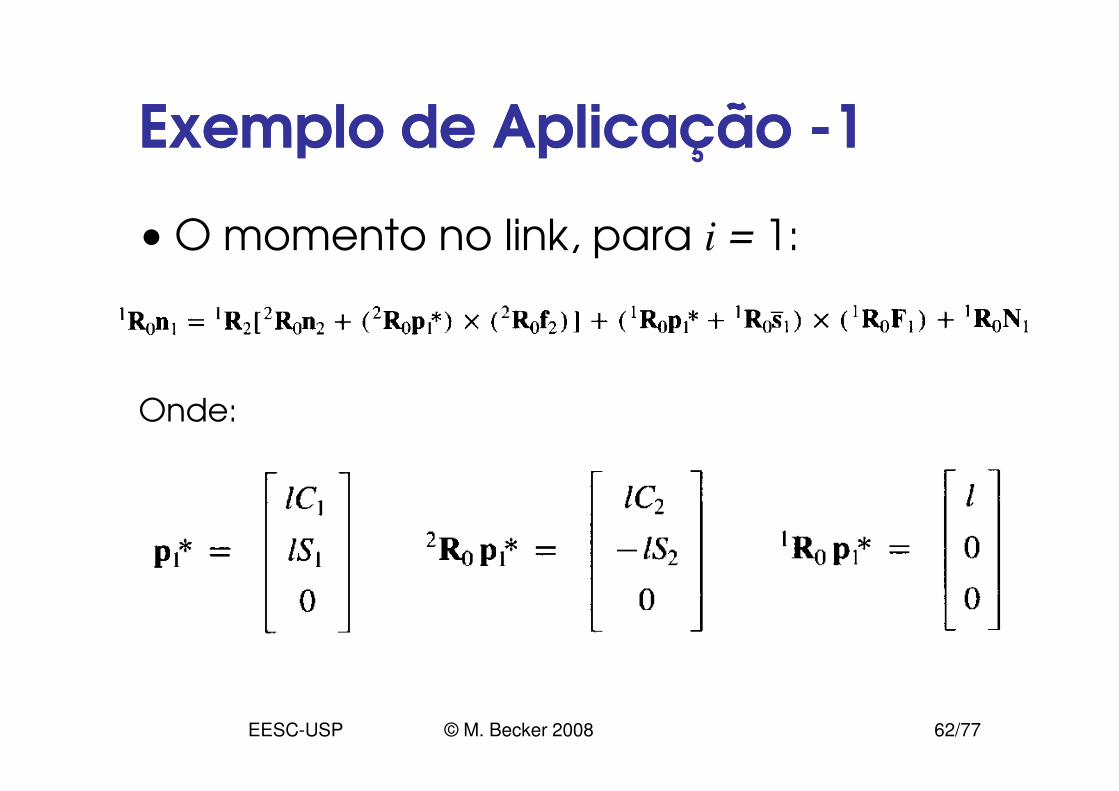
• O momento no link, para i = 1:
Onde:Onde:
EESC-USP © M. Becker 2008 62/77
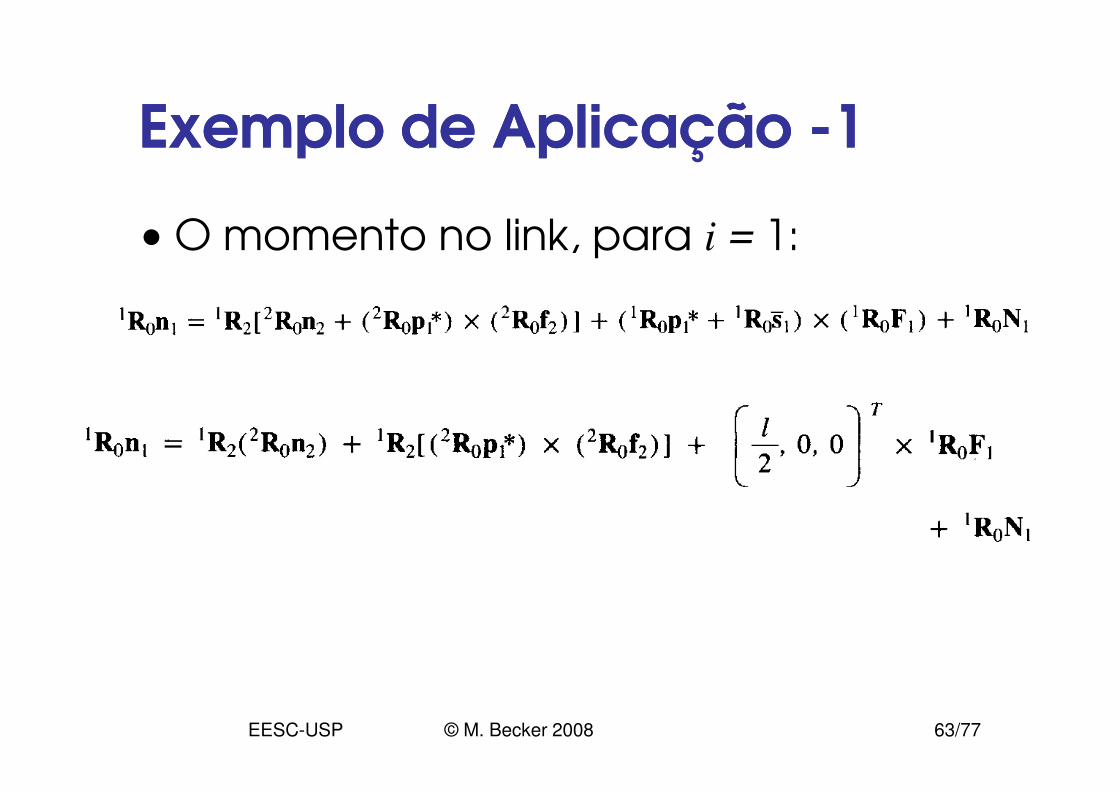
Exemplo de Aplicação Exemplo de Aplicação --11
• O momento no link, para i = 1:
EESC-USP © M. Becker 2008 63/77

Exemplo de Aplicação Exemplo de Aplicação --11
• E finalmente o torque em cada link, para i = 2, b2 = 0 :
EESC-USP © M. Becker 2008 64/77
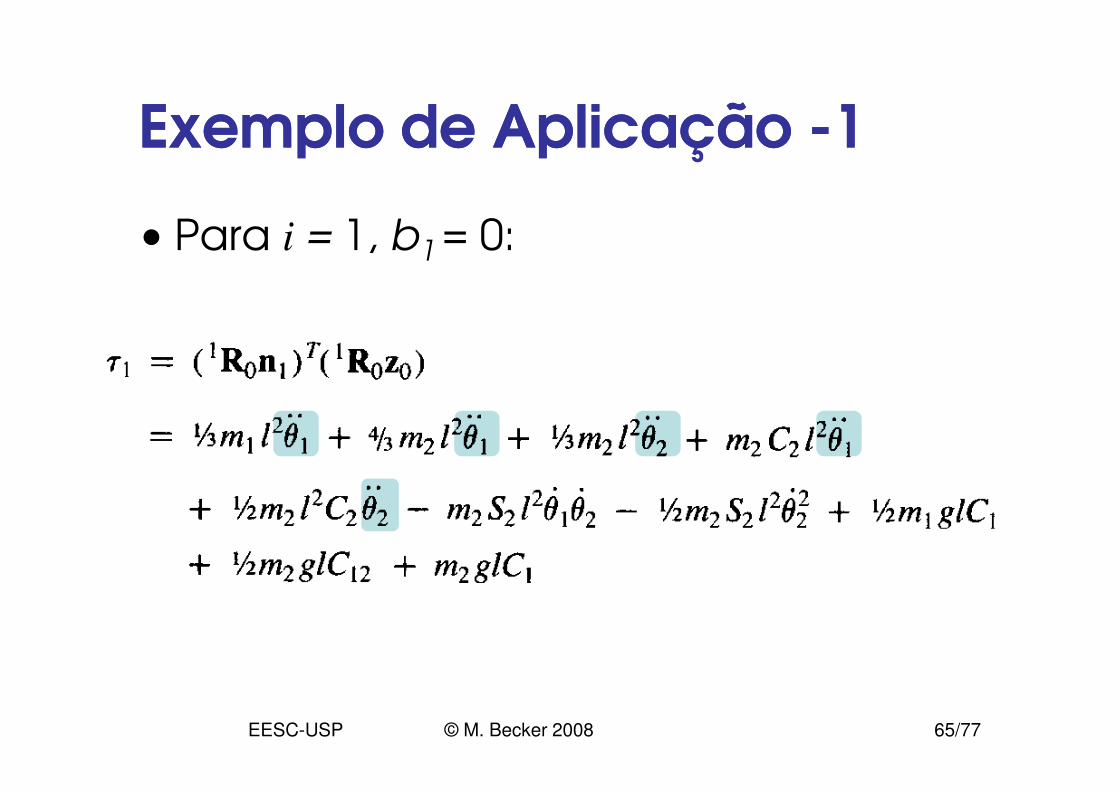
Exemplo de Aplicação Exemplo de Aplicação --11
• Para i = 1, b1 = 0:
EESC-USP © M. Becker 2008 65/77
B*
B
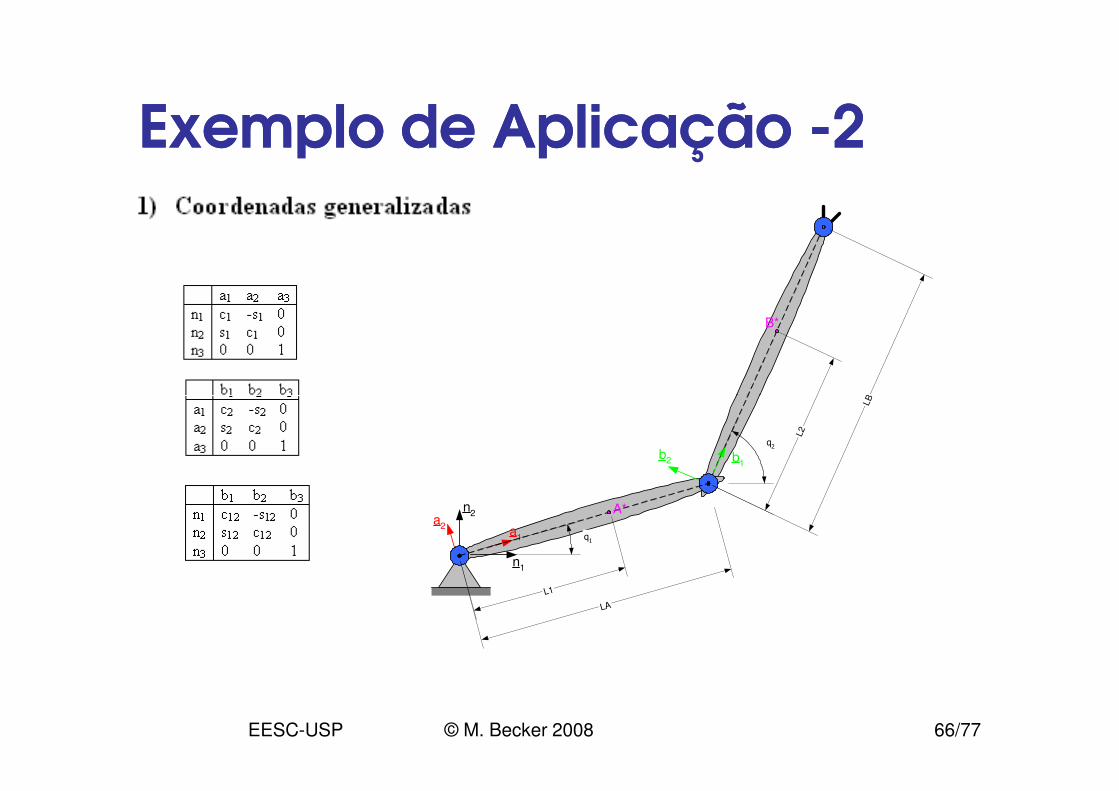
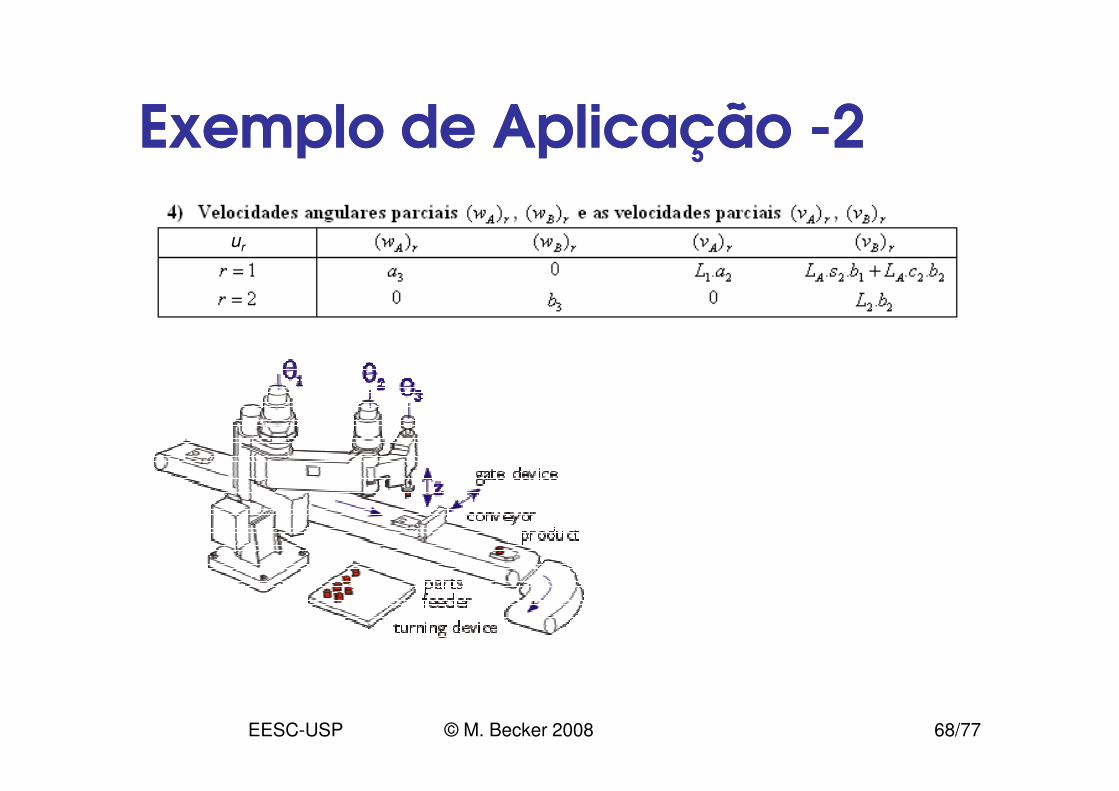
Exemplo de Aplicação Exemplo de Aplicação --22
n1
n2
a1
a2
b1b2
q1
q2
LA
L1
A*
LB
L2
EESC-USP © M. Becker 2008 66/77
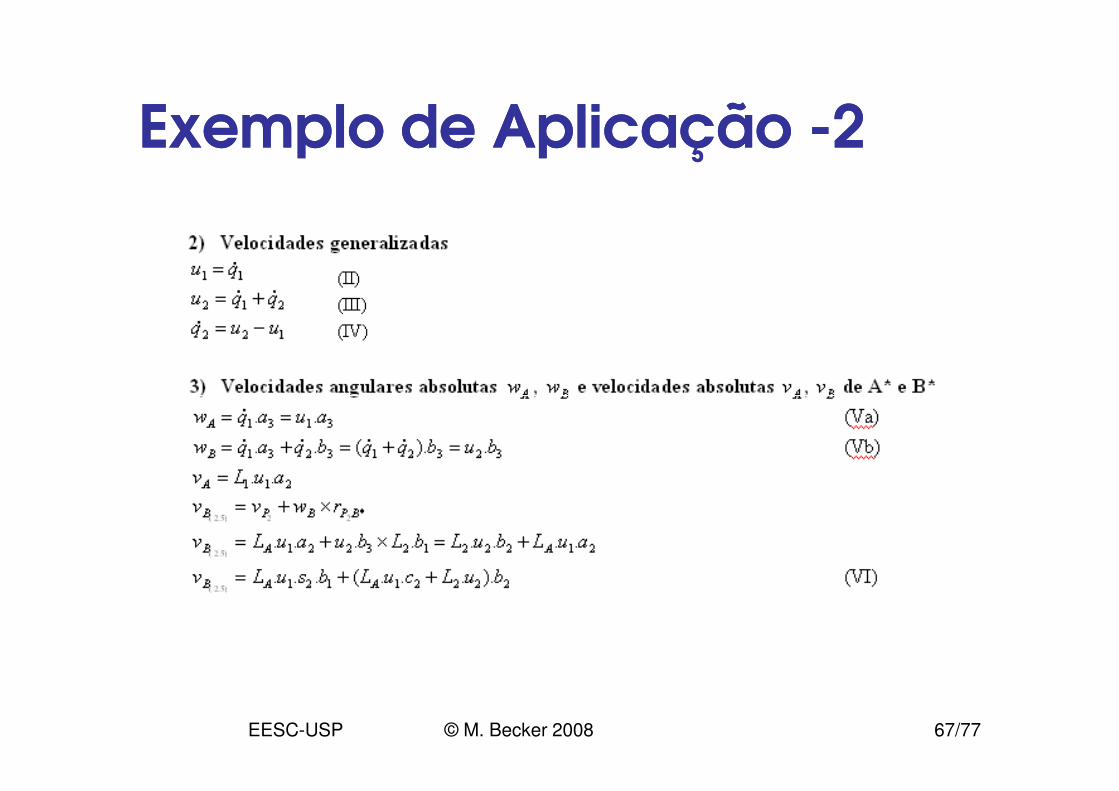
Exemplo de Aplicação Exemplo de Aplicação --22
EESC-USP © M. Becker 2008 67/77
ur
Exemplo de Aplicação Exemplo de Aplicação --22
EESC-USP © M. Becker 2008 68/77
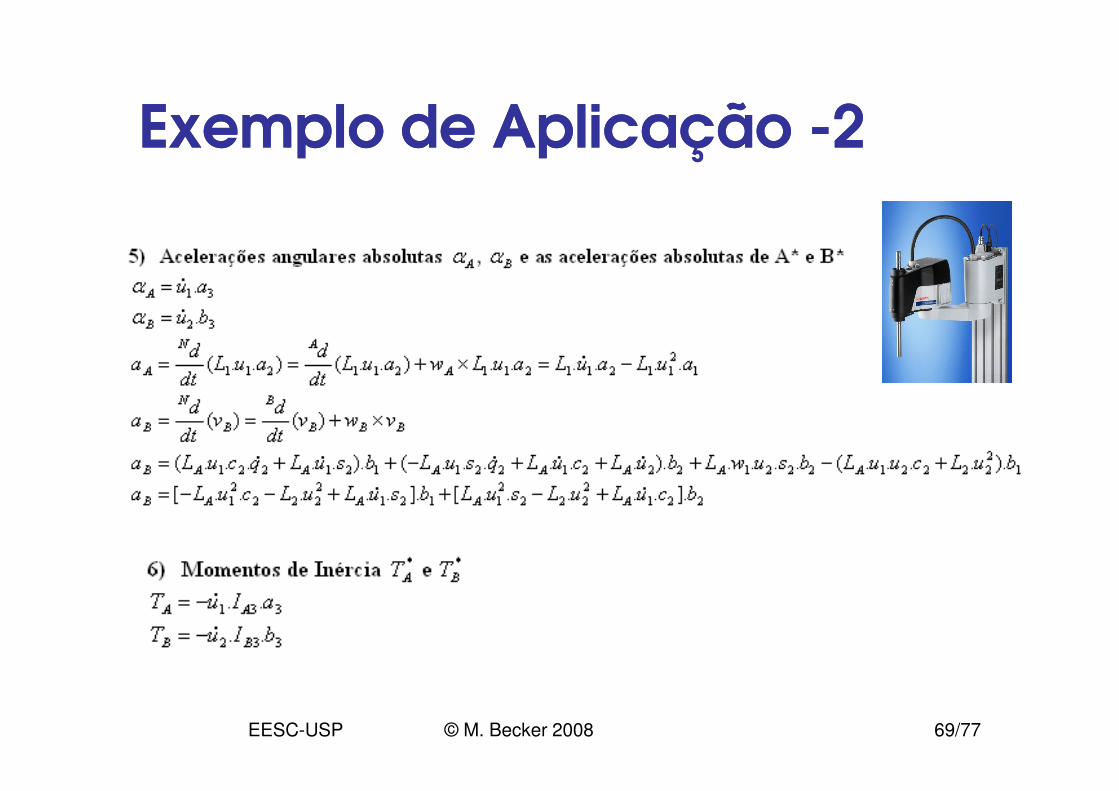
Exemplo de Aplicação Exemplo de Aplicação --22
EESC-USP © M. Becker 2008 69/77

Exemplo de Aplicação Exemplo de Aplicação --22
),(),()( uqFuqVuqM =+&
0*
=+ rr FF
EESC-USP © M. Becker 2008 70/77
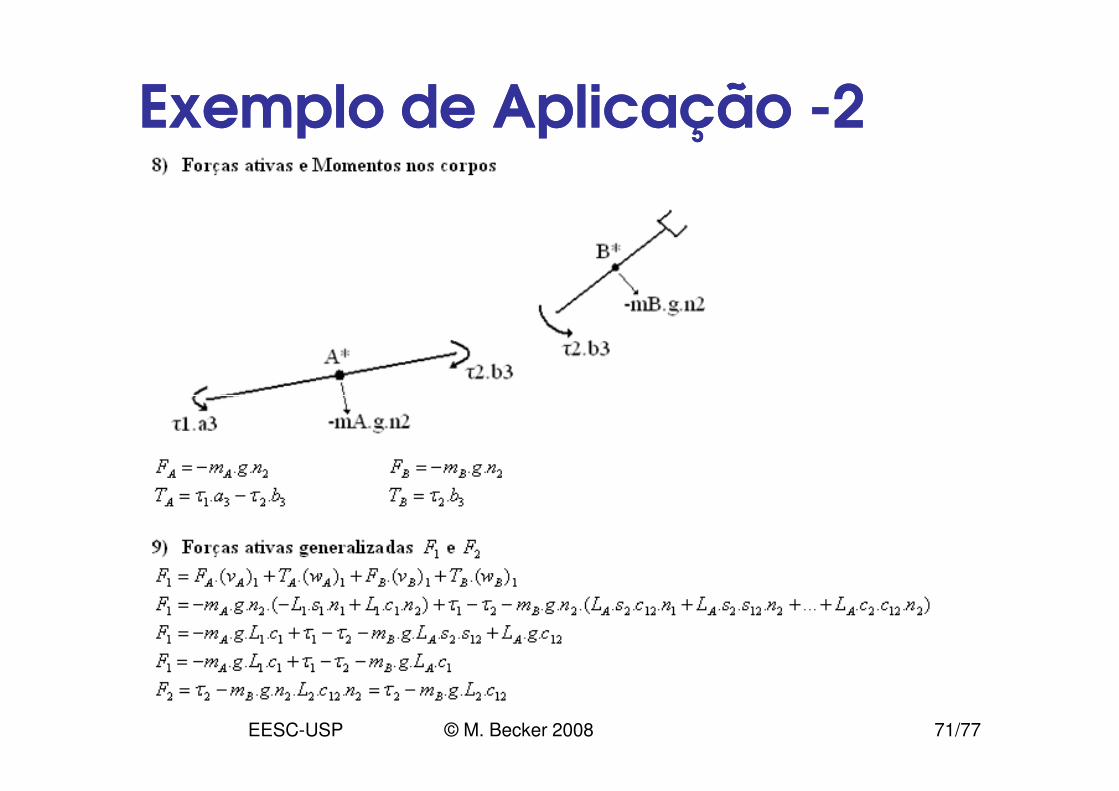
Exemplo de Aplicação Exemplo de Aplicação --22
EESC-USP © M. Becker 2008 71/77
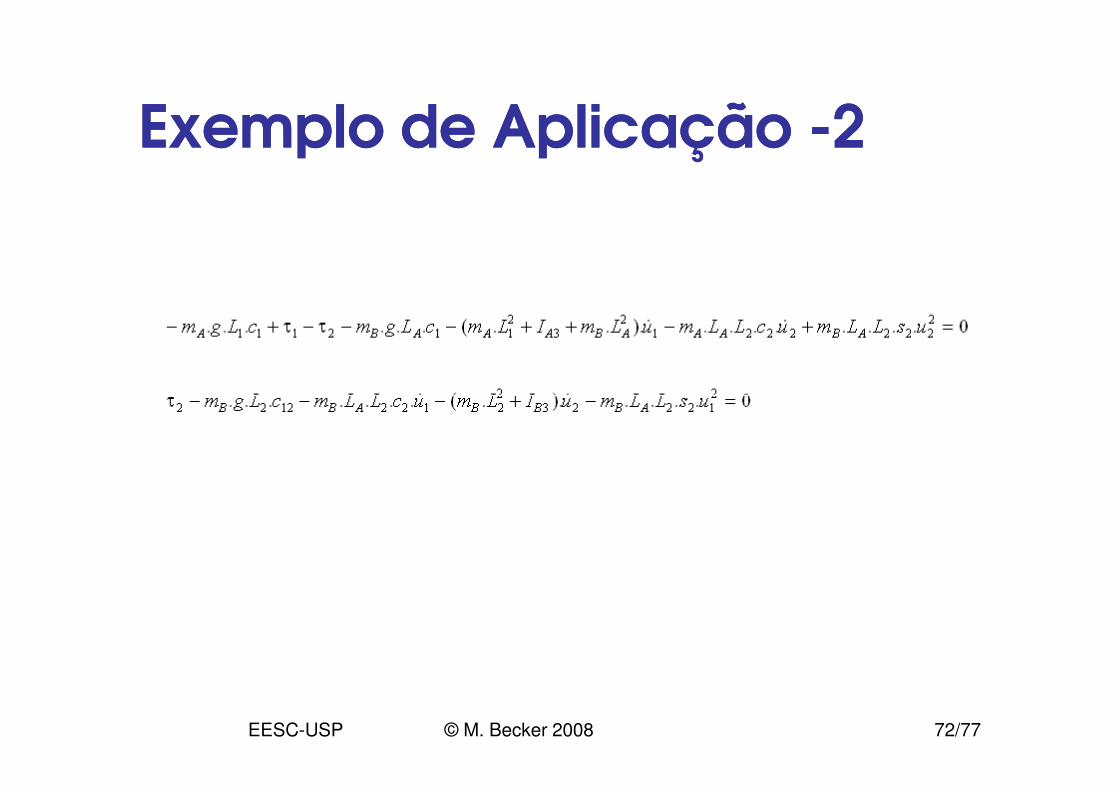
Exemplo de Aplicação Exemplo de Aplicação --22
EESC-USP © M. Becker 2008 72/77
•• IntroduçãoIntrodução
•• Método Método NewtonNewton--EulerEuler
•• Método de Método de KraneKrane
Sumário da AulaSumário da Aula
•• Método de Método de KraneKrane
•• Exemplo de AplicaçãoExemplo de Aplicação
•• Exercícios RecomendadosExercícios Recomendados
• Bibliografia Recomendada
EESC-USP © M. Becker 2008 73/77

Exercícios RecomendadosExercícios Recomendados
• Exercícios Recomendados:– Livro do Craig (2005): pp. 194-200
– Grupo de 5 alunos:
• Tarefa extra...
EESC-USP © M. Becker 2008 74/77

Tarefa extra-aula:Desenvolva as Equações de Movimento para odedo de robô da figura abaixo:
EESC-USP © M. Becker 2008 75/77
•• IntroduçãoIntrodução
•• Método Método NewtonNewton--EulerEuler
•• Método de Método de KraneKrane
Sumário da AulaSumário da Aula
•• Método de Método de KraneKrane
•• Exemplo de AplicaçãoExemplo de Aplicação
•• Exercícios RecomendadosExercícios Recomendados
•• Bibliografia RecomendadaBibliografia Recomendada
EESC-USP © M. Becker 2008 76/77
Bibliografia RecomendadaBibliografia Recomendada
• Santos, I.F., 2001, Dinâmica de Sistemas Mecânicos: Modelagem, Simulação, Visualização e Verificação, Makron Books, ISBN 85-346-1110-6.
• Fu, K.S., Gonzales, R.C., and Lee, C.S.G., 1987, Robotics: Control, Sensing, Vision, and Intelligence –Robotics: Control, Sensing, Vision, and Intelligence –Capítulo 3, McGraw-Hill Int. Editions, ISBN 0-07-100421-1.
• Craig, J.C., 2005, Introduction to Robotics: Mechanics and Control – Capítulo 6, 3rd Edition, Pearson Education Inc., ISBN 0-201-54361-3
EESC-USP © M. Becker 2008 77/77
Recommended







![Auxilio Judicial[1]](https://img.pdfslide.tips/doc/110x75/5571f79649795991698ba26a/auxilio-judicial1.jpg)









