Embed Size (px)
DESCRIPTION
Citation preview

Bayesian Networks
Unit 8 Probabilistic Inferenceover Time
Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Wang, Yuan-Kai, 王元凱[email protected]
http://www.ykwang.tw
Department of Electrical Engineering, Fu Jen Univ.輔仁大學電機工程系
2006~2011
Reference this document as: Wang, Yuan-Kai, “Probabilistic Inference over Time,"
Lecture Notes of Wang, Yuan-Kai, Fu Jen University, Taiwan, 2011.

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 2
Goal of This Unit• Know the uncertainty concept in temporal
models• Learn four inference types in temporal
models– Filtering, Prediction, Smoothing,
Most Likely Explanation• See some temporal models
– HMM, Kalman/Particle filtering– Dynamic Bayesian networks

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p.
Related Units• Background
– Probabilistic graphical model– Exact inference in BN– Approximate inference in BN
• Next units– HMM– Kalman filter– Particle filter– DBN
3

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 4
Self-Study Reference• Chapter 15, Sections 15.1-15.2, Artificial
Intelligence - a modern approach, 2nd, by S. Russel & P. Norvig, Prentice Hall, 2003.

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 5
Structure of Related Lecture Notes
PGM Representation
Inference
Problem
Learning
Data
Unit 5 : BNUnit 9 : Hybrid BNUnits 10~15: Naïve Bayes, MRF,
HMM, DBN,Kalman filter
Unit 6: Exact inferenceUnit 7: Approximate inferenceUnit 8: Temporal inference
Units 16~ : MLE, EM
StructureLearning
ParameterLearning
B E
A
J M
P(A|B,E)P(J|A)P(M|A)
P(B)P(E)
Query

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p.
Contents
1. Time and Uncertainty …………………...... 72. Inference in Temporal Models ……...……. 463. Various Models .…….................................... 904. References …………………………………. 96
6

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 7
1. Time and Uncertainty
• What is probabilistic reasoning over time–There are a lot of time-series data
• Ex: Stock data, weather data, radar signal, ...
–We want to• Predict its next data• Recover correct values of its current data• Recover correct values of its previous data

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 8
Example – Stock Data

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 9
Example 2 - Visual Tracking• What is visual tracking
– Continuously detect objects in video– Time series data
• What kind of objects– Face, – Facial features (eye, eyebrow, ...)– Human body – Hand – ...

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 10
Why Visual Tracking (1/2)• A simple idea to detect objects in all frames
of a video– "Detect object at every frame with the same
detection method• Disadvantage
– A detection of a frame may be slow– Detections at all frames become very slow
• So, if you have a very quick detection method, the simple method is OK?

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 11
Why Visual Tracking (2/2)• A better approach to detect objects in all
frames of a video– Detect objects at the first frame– Find objects at succeeding frames with a quick
method tracking
• Goal of visual tracking– Fast and accurate detection of objects

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 12
Front-View Face TrackingSingle frame detector
Temporal detector

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 13
Side-View Face Tracking
without temporal continuity without temporal continuity

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 14
Two Kinds of Approaches• Neighborhood-based
– Search the neighborhood of the object's location in previous frame
• Prediction-based– Search the neighborhood of the predicted
location in current frame

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 15
Basic Algorithm• Basic idea of both the two approaches
1.Read first frame2.Detect moving object O
Obtain Region of Interest (ROI), usually rectangle or ellipse
3.Read next frame4.For all possible ROI candidate Oc
a)Compare the similarity between O and Oc
b)If similarity is high, tracking successfully. Break

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 16
Neighborhood-search Tracking• Basic idea
1. Read first frame2. Detect face O
Obtain Region of Interest (ROI), usually rectangle or ellipse
3. Read next frame4. For all possible ROI candidate Oc
a) Compare the similarity between O and Oc
b) If similarity is high, break

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 17
Basic Ideas
FaceDetection
FaceTracking
First frame
Next frame
O
O
OcSearch Region

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 18
Prediction-based Tracking• Three steps
– Predict next position of moving objects with a probabilistic model (parameters)
– Detect new position around the predicted position
• Prediction error– Update
• The correct position• The probabilistic model with the
prediction error

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 19
Predict Next Position
( | )t tP z x
Detected position : zt
Real position : xt Predicted positionx-
t+1
( | )t tP z x
1( | )t tP x x
1( | )t tP x xProbabilistic
model
Current framePrevious frames

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 20
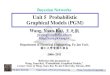
Detect New Position by LSE
SE = 1032, 2560,1968, 104, 2223, ...
LSE = 104
Predicted position
Search region
Detected position: zt+1

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 21
Update
'( | )t tP z x
1'( | )t tP x x
x-t+1 zt+1Prediction Error
x-t+1-zt+1
Corrected position xt+1
Corrected Probabilistic
model

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 22
Accurate Tracking = Smoothing

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 23
Example 3 - Robot Localization• Localization of AIBO robot in
RoboCup• The robot has to
–See landmark• Object detection & object recognition
–Analyze the landmark• Calculate distance & angle between the
robot and the landmark–Estimate its location

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 24
RoboCup Field
),( r

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 25
Tracking of Robot

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 26
Temporal Patterns• Deterministic patterns :
– Traffic light– FSM
(Finite State Machine)– …
• Non-Deterministic patterns :– Weather– Speech– Tracking– …

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 27
How to Do It?• What we want?
–Prediction: Predict its next data–Filtering: Recover correct values of its
current data–Smoothing: Recover correct values of
its previous data• How to achieve it?
–Statistically model the data

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 28
Statistically Modeling
x
y
y = 1.3x + 96 : ModelA set of time-related data
PredictFilterSmooth

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 29
State• There is a set of time-related data
• We call each data– A state of the system, or – A state of the object
Time t = 0 1 2 3 ... ︵
50, 10050, 18050, 160︶
︵49, 9850, 17849, 158︶
︵50, 9650, 17650, 156︶
︵48, 9447, 17348, 154︶
State s =

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 30
Observable v.s. Unobservable States• Observable state
– Measurable values• Sensor values, feature values
– Ex : Localization/Visual Tracking• Measured position, Measured speed
– Ex : Facial Expression Recognition• Eyebrow up, eyebrow down, ...
• Unobservable state– Real state of the system/object– Ex : Localization/Visual Tracking
• Real position, real speed– Ex : Facial Expression Recognition
• Smile, Cry, Anger, ...

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 31
Observable v.s. Unobservable States (Math)
• Let– Xt = set of unobservable state variables at
time t– Et = set of observable state variables at
time t• Usually we observe
– E0, E1, ...., Et : time-related data• But we want to derive
– X0, X1, ..., Xt• Notation: Xa:b = Xa, Xa+1, ..., Xb

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 32
Markov Chain• Markov chain is an assumption
–A state is dependent on previous state–Xt depends on X0:t-1–Xt+1 will not influence Xt
• Markov process– If we assume that a set of data obeys
Markov assumption,–We say the data perform Markov
process

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 33
Markov Process• First-order Markov process
– P(Xt |X0:t-1)=P(Xt | Xt-1 )
• Second-order Markov process– P(Xt |X0:t-1)=P(Xt | Xt-2 , Xt-1 )
• Higher order Markov process ...– Complicate, seldom used

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 34
Transition Model & Sensor Model• Transition model
–P(Xt | Xt-1 )–P(Xt | Xt-2 , Xt-1 )
• Sensor model–We usually assume the evidence
variables (sensor values) at time t, Et, depend only on the current state Xt
–P(Et|X0:t, E0:t-1) = P(Et|Xt)– It is also called observation model

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 35
Diagram of Transition & Sensor Models for 1st Order Markov
• P(Xt | Xt-1 )
• P(Et|Xt)
Xt-1 Xt
Xt Et
Xt-1 Xt
Et
Xt+1 Xt+2
Et+1 Et+2
A special Bayesian network
Transition of unobservable states
Causal relationship between observable & unobservable states

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 36
An "Umbrella World" Example (1/2)• A security guard is always at a secret
underground room, without going out• He wants to know if it is raining today• But he can not observe the outside world• He can only see each morning the
director coming in with, or without, an umbrella
• Rain is the unobservable state• Umbrella is the observable state
(sensors values)

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 37
An "Umbrella World" Example (2/2)
• For each day t, the set Et contains a single evidence Ut (whether the umbrella appears)
• The set Xt contains a single state variable Rt(whether it is raining)

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 38
Stationary Process• The transition model P(Xt | Xt-1) and the
sensor model P(Et | Xt) are all fixed for all time t
• Stationary process assumption– Can reduce the complexity of the
algorithm for inference

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 39
Inference for the Markov Process (1/2)
• A Bayesian net with 2 random variables– X: X0, X1, ..., Xt– E: E1, ..., Et
• We know that P(X0, X1, ..., Xt, E1, ..., Et), the FJD, can answer any query– But it can be reduced
X0 X1
E1
X2 Xt
E2 Et
t
iiiiitt XEPXXPXPEEXXXP
110110 )|()|()(),,,,,(

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 40
Inference for the Markov Process (2/2)• We need three PDFs
–P(X0), P(Xi|Xi-1), P(Ei|Xi)• For discrete R.V., we need
–1 prior probability table P(X0) –2 CPTs
• CPT for transition model: P(Xi|Xi-1)• CPT for sensor model: P(Ei|Xi)
• For continuous R.V., we need–Gaussian pdf, Gaussian Mixture, ...
• Here we consider only discrete R.V.

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 41
Sequence Diagram (1/4)
P(X0) probability table ?• Suppose the unobservable variable X
is a discrete R.V.•X = S1, S2, S3, ..., Si, ...
• P(X0) is the probability of X=Si at t=0
X0 X1
E1
X2 Xt
E2 Et
X P(X0)S0 0.2S1 0.1... ...Si 0.3

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 42
Sequence Diagram (2/4)
P(Xt|Xt-1) conditional probability table ?
X0 X1
E1
X2 Xt
E2 Et
Xt+1XtS1 S2 ... Si
S1 0.1 0.2 ... 0.05S2 0.2 0.15 ... 0.18... ... ... ... ...Si 0.31 0.03 ... 0.22
Transitionprobability

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 43
Sequence Diagram (3/4)X0 X1
E1
X2 Xt
E2 Et
P(Et|Xt) conditional probability table ?EtXt
v1 v2 ... vj
S1 0.1 0.2 ... 0.05S2 0.2 0.15 ... 0.18... ... ... ... ...Si 0.31 0.03 ... 0.22
Observationprobability

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 44
Sequence Diagram (4/4)
S1
S3
S2
S1
S3
S2
S1
S3
S2
S1
S3
S2
S1
S3
S2
S1
S3
S2
S1
S3
S2
t =1 2 3 4 5 6 7
X1 X2 X3 X4 X5 X6 X7S3S3 S1 S1 S3 S2 S3
v2 v4 v1 v1 v2 v3 v4E1 E2 E3 E4 E5 E6 E7

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 45
Short Summary
• If we have the three PDFs/Tables– P(X0), P(Xi|Xi-1), P(Ei|Xi)
• We can answer any query– P(X1, X3 | E2, E4), P(X1, E5 | X2, X4), ...
• Do we need to ask many kinds of query?• Or we have some frequently asked queries?
X0 X1
E1
X2 Xt
E2 Et

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 46
2. Inference in Temporal Models• Four common query tasks in
temporal inference/reasoning–Filtering: P(Xt | e1:t)= P(Xt | E1:t=e1:t)
• Estimate correct current states–Prediction: P(Xt+k | e1:t) for k > 0
• Predict possible next states–Smoothing: P(Xk | e1:t) for 1 k < t
• Better estimate of past states–Most likely explanation:
arg maxX1:t P(X1:t | e1:t)

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 47
Subsections
• 2.1 Graphical models of the 4 inferences
• 2.2 Mathematical formula of the 4 inferences

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 48
2.1 Graphical Models of the 4 Inferences
• Use sequence diagram to illustrate what are–Filtering–Prediction–Smoothing–Most likely explanation

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 49
Graphical Models - Filtering• P(Xt | e1:t) X0 X1
E1
X2 Xt
E2 Et
A filtering example for 2D position of robot/WLAN card

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 50
Graphical Models - Prediction
• P(Xt+k | e1:t) for k > 0
X0 X1
E1
X2 Xt
E2 Et
Xt+1
For k=1

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 51
Graphical Models – Smoothing (1/3)
• P(Xk | e1:t) for 1 k < t
X0 X1
E1
X2 Xt
E2 Et
Xk
Ek

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 52
Graphical Models – Smoothing (2/3)

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 53
Graphical Models – Smoothing (3/3)Smoothing v.s. Filtering

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 54
Graphical Models - Most Likely Explanation (1/2)
• arg maxX1:tP(X1:t | e1:t)
X0 X1
E1
X2 Xt
E2 Et

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 55
Graphical Models - Most Likely Explanation (2/2)
S1
S3
S2
S1
S3
S2
S1
S3
S2
S1
S3
S2
S1
S3
S2
S1
S3
S2
S1
S3
S2
t =1 2 3 4 5 6 7
E1=v2 E2=v4 E3=v1 E4=v1 E5=v2 E6=v3 E7=v4

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 56
2.2 Mathematical Formulaof the 4 Inferences
• Derive mathematical formula of–Prediction–Filtering–Smoothing–Most likely explanation

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 57
Prediction (1/3)• P(Xt+1 | e1:t ): one-step prediction as
example
X0 X1
E1
X2 Xt
E2 Et
Xt+1
tXX ti
iiiitttt XePXXPXXPXPeXP , 1
110:110
)|()|()|()()|(
But more efficient formula can be derived

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 58
Prediction (2/3)• New formula for P(Xt+1 | e1:t )
– Xt+1 has no relationship to e1, e2, ..., et– But they both have relationship to xt– If X is a Boolean R.V., P(Xt+1|e1:t)
=<P(xt+1=true|e1:t), P(xt+1=false|e1:t)>• P(Xt+1 | e1:t )
– = xtP(Xt+1 | xt , e1:t )P(xt | e1:t )
– = xtP(Xt+1 | xt )P(xt | e1:t )
by transition model
CPT of transition model Filtering

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 59
Prediction (3/3)
S1
S3
S2
SN
…
t = 1 2 3 ... t t+1…
S1
S3
S2
S1
S3
S2
SN…
SN
S1
S3
S2
S1
S3
S2
SN
…
SN
…………
…
P(S1|S2)
P(S2|S2)
P(S3|S2)
P(SN|S2)
Et=v2 v4 v1 ... v3
P(Xt+1 | e1:t) = xtP(Xt+1| xt )P(xt | e1:t )
= xtP(S2|Si)P(Si|e1:t)
= xtP(Xt+1=S2| xt=Si)P(xt=Si | e1:t )
P(Xt+1=S2 | e1:t) e1:t
= P(S2|S1)P(S1|e1:t)+ P(S2|S2)P(S2|e1:t)+ P(S2|S3)P(S3|e1:t)+ ...
P(S1|e1:t)
P(S2|e1:t)
P(S3|e1:t)
P(SN|e1:t)

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 60
Filtering (1/3)• P(Xt+1 | e1:t+1) X0 X1
E1
X2 Xt+1
E2 Et+1
( or P(Xt | e1:t) )
tXX ti
iiiitt XePXXPXPeXP , 1
101:110
)|()|()()|(
But more efficient formula can be derived

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 61
Filtering (2/3)• P(Xt+1 | e1:t+1)• P(Xt+1 | e1:t+1)= P(Xt+1 | e1:t, et+1)
– = P(et+1 | Xt+1 , e1:t) P(Xt+1 | e1:t)– = P(et+1 | Xt+1 ) P(Xt+1 | e1:t )
– = P(et+1 | Xt+1 ) xtP(Xt+1 | xt , e1:t )P(xt | e1:t )
– = P(et+1 | Xt+1 ) xtP(Xt+1 | xt )P(xt | e1:t )
• We derive a recursive algorithm – P(Xt+1 | e1:t+1) can be calculated by P(Xt | e1:t)– There is a function f that
P(Xt+1 | e1:t+1) = f(et+1, P(Xt | e1:t))
by Bayes ruleby sensor model
by transition modelCPT of sensor model Prediction

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 62
Filtering (3/3)
et+1
P(et+1|Xt+1)=P(v4|S2)
S1
S3
S2
SN
…t = 1 2 ... t t+1
…S1
S3
S2
S1
S3
S2
SN
…SN
S1
S3
S2
SN
…
………
…
Et=v2 v4 ... v3
P(Xt+1 | e1:t+1)= P(et+1 | Xt+1)P(Xt+1 | e1:t )
P(Xt+1=S2 | e1:t+1)= P(et+1=v4|Xt+1=S2)
P(Xt+1=S2 | e1:t )
v4
= P(v4 | S2)P(S2 | e1:t )
P(S1|S2)
P(S2|S2)
P(S3|S2)
P(SN|S2)
P(S1|e1:t)
P(S2|e1:t)
P(S3|e1:t)
P(SN|e1:t)
P(Xt+1|e1:t)=P(S2|e1:t)

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 63
Forward Variable• P(Xt+1 | e1:t ) = xt
P(Xt+1 | xt )P(xt | e1:t )• P(Xt+1 | e1:t+1) = P(et+1 | Xt+1) P(Xt+1 | e1:t ) • They are a kind of recursive function• Interesting points
– Both the prediction & filtering of Xt+1 need P(Xt|e1:t)
– We define the P(Xt|e1:t) as a forward variable f1:t
– i.e., f1:t = P(Xt | e1:t ), f1:t(Si) = P(Xt=Si | e1:t )

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 64
Forward Procedure• P(Xt+1 | e1:t+1) = P(et+1 | Xt+1) P(Xt+1 | e1:t )
= P(et+1 | Xt+1) xtP(Xt+1 | xt )P(xt | e1:t )
• The filtering process is rewritten asf1:t+1 = Forward(f1:t , et+1)– A forward procedure (algorithm) :
Forward(f1:t , et+1) = P(et+1 | Xt+1)xt
P(Xt+1 | xt )P(xt | e1:t )

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 65
P(ut|rt)=0.9P(ut|rt)=0.1P(ut|rt)=0.2P(ut|rt)=0.8
Filtering Example (1/4)• For the umbrella example
P(Rt|Rt-1)
P(Ut|Rt)
P(Ut|rt)=<P(ut|rt),P(ut|rt)> = <0.9,0.1>P(Ut|rt)=<P(ut|rt),P(ut|rt)> = <0.2,0.8> P(ut|Rt)?

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 66
Filtering Example (2/4)• Assume the man believes that
P(R0) = <0.5,0.5> = < P(r0), P(r0) >– The rain probability before the
observation sequence begins• Now we has the observation sequence:
umbrella1=true, umbrella2=true• We will use the
filtering processto find rainprobability
Umbrella1=true
Rain1
P(R1|U1)
Umbrella2=true
Rain2
P(R2|U1,U2)

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 67
Filtering Example (3/4)
Rt-1 P(Rt)t 0.7f 0.3
Umbrella1=true
Rain1
Umbrella2=true
Rain2Rain0
P(R1) = r0
P(R1|r0)P(r0)= <0.7,0.3>0.5 + <0.3,0.7>0.5 = <0.5,0.5>P(R1|u1) = P(u1|R1)P(R1)= <0.9,0.2><0.5,0,5> = <0.45,0.1> <0.818, 0.182>
Rt P(Ut)t 0.9f 0.2
P(R1|u1)= P(u1|R1)P(R1)

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 68
Filtering Example (4/4)
Rt-1 P(Rt)t 0.7f 0.3
Umbrella1=true
Rain1
Umbrella2=true
Rain2Rain0
P(R2|u1) = r1
P(R2|r1)P(r1|u1)= <0.7,0.3>0.818 + <0.3,0.7>0.182 = <0.627,0.373>
P(R2|u1,u2) = P(u2|R2)P(R2|u1)= <0.9,0.2><0.627,0,373> = <0.565,0.075> <0.883, 0.117>
Rt P(Ut)t 0.9f 0.2P(R2|u1,u2)
= P(u2|R2)P(R2|u1)

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 69
Smoothing (1/2)• P(Xk | e1:t) for 1 k < t
–Divide e1:t into e1:k and ek+1:t–P(Xk | e1:t) = P(Xk | e1:k , ek+1:t)–= P(Xk | e1:k)P(ek+1:t | Xk , e1:k)–= P(Xk | e1:k)P(ek+1:t | Xk )

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 70
Smoothing (2/2)
t = 1 k-1 k k+1 t
S1
S3
S2
S1
S3
S2
SN
…
SN
…
………
…
S1
S3
S2
S1
S3
S2
SN
…
SN
…
………
…
P(x1|x2)
P(x2|x2)
P(x3|x2)
P(xN|x2)
Et= v2 ... v4 v3 v1 ... v4
P(Xk=S2 | e1:t)
S1
S3
S2
SN
…

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 71
Backward Variable• P(ek+1:t | Xk)
– = xk+1P(ek+1:t | Xk, xk+1)P(xk+1 | Xk)
– = xk+1P(ek+1:t | xk+1)P(xk+1 | Xk)
– = xk+1P(ek+1 , ek+2:t | xk+1)P(xk+1 | Xk)
– = xk+1P(ek+1 | xk+1)P(ek+2:t | xk+1)P(xk+1 | Xk)
• This is also a recursive formula• We define a backward variable bk+1:t
– bk+1:t = P(ek+1:t | Xk)

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 72
Backward Procedure (1/2)• P(ek+1:t | Xk)
= xk+1P(ek+1|xk+1)P(ek+2:t|xk+1)P(xk+1|Xk)
• The formula is rewritten asbk+1:t = Backward(bk+2:t , ek+1)

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 73
Backward Procedure (2/2)
t = 1 k k+1 t
S1
S3
S2
S1
S3
S2
SN
…
SN
…
………
…
Et= v2 ... v4 v1 ... v4
P(ek+1:t |xk)
…S1
S3
S2
SN
………
…
S1
S3
S2
SN
…
= xk+1P(ek+1|xk+1)P(ek+2:t|xk+1)P(xk+1|Xk)
P(ek+1:t |xk=S2)= xk+1
P(v1|xk+1)P(ek+2:t|xk+1)P(xk+1|S2)
= P(v1|S1)P(ek+2:t|S1)P(S1|S2)+ P(v1|S2)P(ek+2:t|S2)P(S2|S2)+ ...+ P(v1|SN)P(ek+2:t|SN)P(SN|S2)

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 74
The Smoothing Formula• P(Xk | e1:t) = P(Xk | e1:k , ek+1:t)
–= P(Xk | e1:k)P(ek+1:t | Xk , e1:k)–= P(Xk | e1:k)P(ek+1:t | Xk )–= f1:kbk+1:t
• Time complexity–Both the forward and backward
recursions take a constant time per step
–Complexity of smoothing P(Xk | e1:t) with e1:t is O(t)

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 75
Smoothing Example (1/3)• For the umbrella example• P(R1 | u1, u2)
– Computing the smoothed estimate for the probability of rain at t=1,
– Given the umbrella observations on days 1 & 2
Rt-1 P(Rt)t 0.7f 0.3
Umbrella1=true
Rain1
Umbrella2=true
Rain2Rain0 Rt P(Ut)t 0.9f 0.2

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 76
Smoothing Example (2/3)• P(R1 | u1, u2) = P(R1|u1)P(u2|R1)
– P(R1|u1) = <0.818, 0.182>– P(u2|R1) = r2
P(u2|r2)P(|r2)P(r2|R1)= (0.91<0.7,0.3>) + (0.21<0.3,0.7>)= <0.69, 0.41>
• P(R1 | u1, u2) = <0.818,0.182><0.69,0.41> <0.883, 0.117>
• Note: P(R1|u1) = <0.818, 0.182>• With more one observation u2, the
probability of r1 increases smoothing

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 77
Smoothing Example (3/3)

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 78
Most Likely Explanation (1/2)• Smoothing P(Xk | e1:t) considers only
one past state at time step k• Most likely explanation,
arg maxX1:tP(X1:t | e1:t)
–Considers all past states, and–Choose the best state sequence
X0 X1
E1
X2 Xt
E2 Et

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 79
Most Likely Explanation (2/2)• We will discuss 3 algorithms
–Algorithm 1: • Very simple, directly using smoothing• Time complexity O(t2)
–Algorithm 2(forward-backward algo.):• Improved usage of smoothing• Time complexity O(t)• But the result may not be the best state
sequence–Algorithm 3(Viterbi algorithm):
• Time complexity O(t)

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 80
Algorithm 1• The most simple idea for this
problem–Call smoothing t times, smoothing one
state each time–For (i=0; i<t; i++) P(Xi | e1:t)
• Drawback–Time complexity of O(t2) : too slow
• Improvement–Apply dynamic programming to
reduce the complexity to O(t)

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 81
Algorithm 2 (1/2)• Forward-backward algorithm
–First, record the results of the forward filtering over the whole sequence from 1 to t
–Then, run the backward recursion from tdown to 1, and • Compute the smoothed estimate at each time
step k, from the bk+1:t and the stored f1:k

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 82
Algorithm 2 (2/2)
in previous slides
fv[i]= f1:t = P(Xt | e1:t )forward procedure: f1:t+1 = Forward(f1:t , et+1)
backward procedure: bk+1:t = Backward(bk+2:t , ek+1)
Smoothing: P(Xk | e1:t) = f1:kbk+1:t

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 83
However (1/2)• For the umbrella example, suppose there is
an observation sequence e1:t=[true, true, false, true, true] for umbrella's appearance
• What is the weather sequence most likely to explain this?– Does the absence of the umbrella on day 3
mean that• Day 3 wasn't raining, or• The director forget to bring it?• If day 3 wasn't raining, day 4 may not be raining
either, but the director brought the umbrella just in case

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 84
However (2/2)• The forward-backward algorithm
uses smoothing for each single time step
• But to find the most likely sequence, we must consider joint probabilities over all time steps
• To consider joint probabilities of a sequence, we need to consider path

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 85
Path• A path is a possible sequence
– There are 25 paths– Each path (sequence) has a probability– Only one path has the maximum
probability

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 86
Probability of Path
• arg maxX1:tP(X1:t | e1:t)
t
iiiiitt XePXXPeXP
11:1:1 )|()|()|(

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 87
Recursive View • An important idea for finding
arg maxX1:tP(X1:t | e1:t)
–A path in maxX1:t-1P(X1:t-1 | e1:t-1) must
be the path in maxX1:tP(X1:t | e1:t)

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 88
The Viterbi Example

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 89
Algorithm 3• Viterbi algorithm
)|,,,(max)|(max)|(
)|,,,(max
:111111
1:111
11
1
tttxxttxtt
tttxx
exxxPxXPXeP
eXxxP
tt
t
• It is similar to the filtering algorithmP(Xt+1 | e1:t+1) = P(et+1 | Xt+1) xt
P(Xt+1 | xt )P(xt | e1:t )

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 90
3. Various Models
• Hidden Markov Models• Kalman Filter• Particle Filter• Dynamic Bayesian Networks

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 91
Hidden Markov Model (1/2)
Y1 Y3
X1 X2 X3
Y2
Observationseg. Detected
location
Hidden stateseg. Real location
n
iiin xpaxPxxxP
121 ))(|(),...,,(

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 92
Hidden Markov Model (2/2)
Y1 Y3
X1 X2 X3
Y2
Transition matrix
Observation matrix
Initial state distribution
B
A
Parameter tyeing

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 93
Kalman Filtering
Y1 Y3
X1 X2X3
Y2
• The same graphical structure with HMM• But
•In HMM, Xi and Yi are discrete (CPT)•In Kalman filter, Xi and Yi are continuous

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 94
Particle Filtering• TBU

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 95
Dynamic Bayesian Network (DBN)• TBU

Fu Jen University Department of Electrical Engineering Wang, Yuan-Kai Copyright
Bayesian Networks Unit - Probabilistic Inference over Time p. 96
4. References
• Chapter 15, Sections 15.1-15.2, Artificial Intelligence - a modern approach, 2nd, by S. Russel & P. Norvig, Prentice Hall, 2003.