Embed Size (px)
Citation preview
111Equation Chapter 1 Section 1Tema 1 - INTRODUCCION AL CONTROL
DE MOTORES
CONCEPTO DE ACCIONAMIENTO ELÉCTRICO
Componentes de equipos de producción en la industria moderna:
- El motor primario.- El dispositivo transmisor de energía.- El equipo que desarrolla el trabajo aplicación particular.
Motor primario motor eléctrico
Supera desempeño máquinas vapor, hidráulicas, motores diesel o gasolina.
Motores eléctricos conectados a un sistema de control
Facilitar ajuste condición operación satisfacer requerimientos carga mecánica.
Sistema de control más simple incluye un arrancador compacto.
Aplicaciones complejas relés electromagnéticos, contactores, arrancadores de diferente
tipo, interruptores maestros, relés térmicos, dispositivos de estado sólido, controladores
lógicos programables (PLC), equipos de control digital, entre otros.
Propósito del controlador
Factores a considerar al seleccionar e instalar el controlador:
- Arranque directo a línea o tensión reducida lento y gradual daños
- Parada posible acción de frenado detención rápida
- Inversión de giro desde mando de control proceso continuo industria
- Control velocidad velocidades precisas o ajuste por pasos gradualmente
- Seguridad operador dispositivos de control condiciones inseguras
- Protección contra daños funcionar en reversa, detenerse, trabajar a velocidad
lenta para liberar atascamiento.
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 1
- Mantenimiento de dispositivos de arranque tiempos de arranque, voltaje, corriente y
torque confiables beneficio de máquina accionada fusibles, cortacircuitos,
interruptores de desconexión de tamaño apropiado para el arranque.
Normas y reglamentos
- Código Eléctrico Nacional (NTC2050)
- Reglamentos Técnicos de Instalaciones Eléctricas (RETIE)
Control manual
Dispositivos típicos:
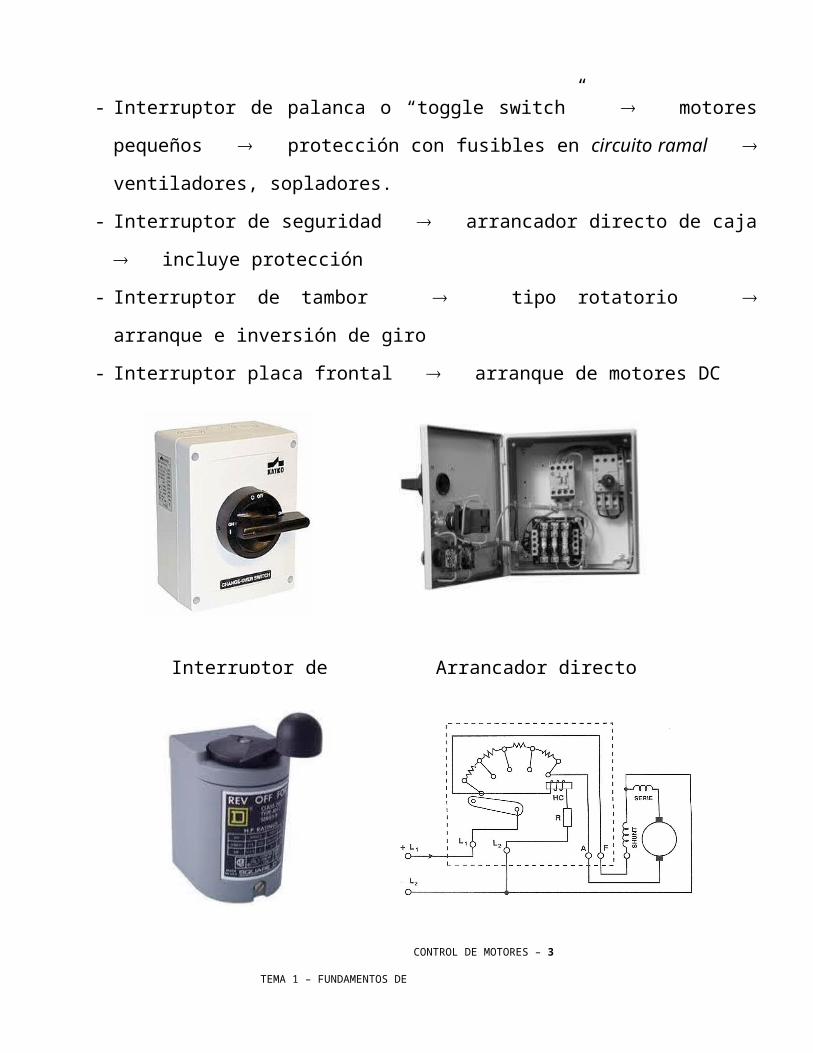
- Interruptor de palanca o “toggle switch” motores pequeños protección con
fusibles en circuito ramal ventiladores, sopladores.
- Interruptor de seguridad arrancador directo de caja incluye protección
- Interruptor de tambor tipo rotatorio arranque e inversión de giro
- Interruptor placa frontal arranque de motores DC
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 2
Interruptor de palanca Arrancador directo de caja
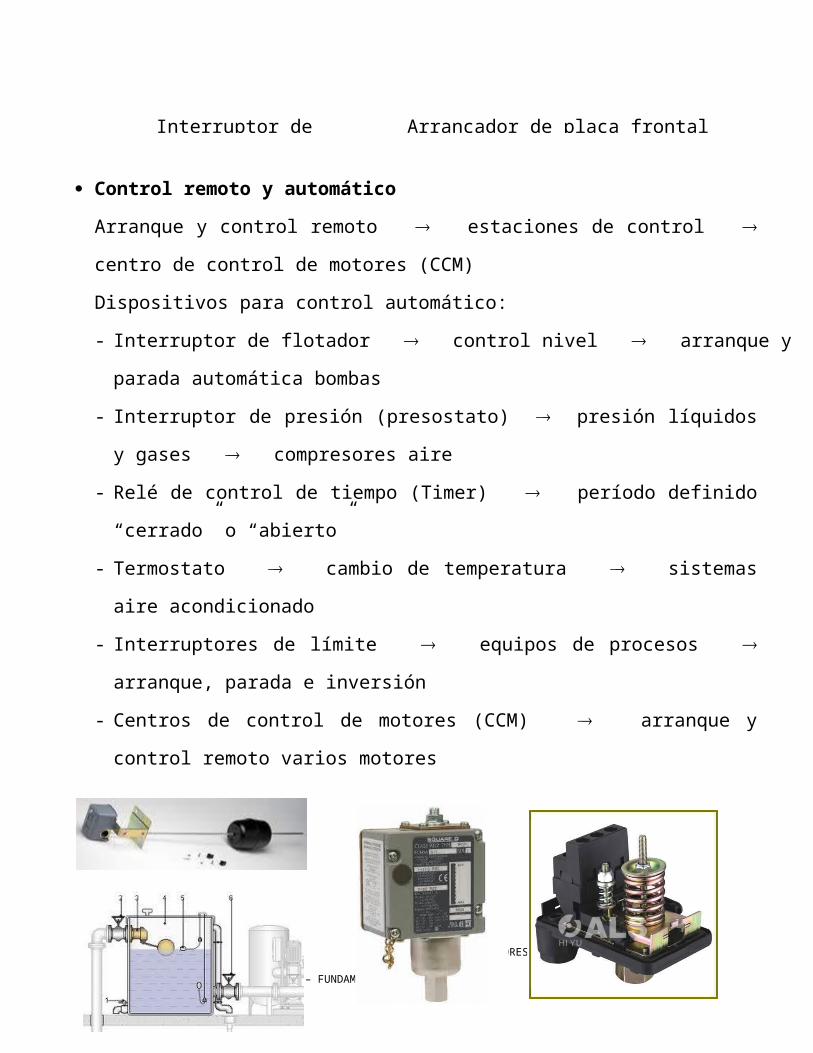
Control remoto y automático
Arranque y control remoto estaciones de control centro de control de motores
(CCM)
Dispositivos para control automático:
- Interruptor de flotador control nivel arranque y parada automática bombas
- Interruptor de presión (presostato) presión líquidos y gases compresores aire
- Relé de control de tiempo (Timer) período definido “cerrado” o “abierto”
- Termostato cambio de temperatura sistemas aire acondicionado
- Interruptores de límite equipos de procesos arranque, parada e inversión
- Centros de control de motores (CCM) arranque y control remoto varios motores
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 3
Interruptor de tambor Arrancador de placa frontal para motor DC
Interruptor de flotador Interruptor de presión aire (presostato)
Arranque y parada del motor eléctrico
Es necesario considerar las siguientes condiciones:
- Frecuencia de arranque y parada ciclo de arranque principal causa de falla
- Arranque ligero o de servicio pesado sin carga o con carga perturbaciones red
- Arranque rápido o lento aumento gradual de velocidad cargas de alta inercia
- Arranque suave aceleración gradual métodos especiales
- Arranque y parada manual o automática tipo carga riesgos de funcionamiento
- Parada rápida o lenta frenado dinámico frenado magnético
- Paradas exactas ascensores equipo automático de parada suave
- Frecuencia inversión de giro exigencias en controlador y red de alimentación
motores especiales evitar fallas en dispositivos de control
- Velocidad constante bombas de agua grupo motor-generador
- Velocidad variable máquinas de elevación y transporte
- Velocidad ajustable ajuste con carga condición particular
- Velocidad múltiple torno revolver dos o más valores constantes
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 4
Relés control de tiempo analógico y digital Termostato
Centro de control de motores

- Protección sobrecarga vida útil del motor temperatura de régimen
- Protección campo abierto pérdida de excitación motores DC
- Protección fase abierta motor trifásico quema de fusible motor parado
- Protección inversión fase motor trifásico invierte el giro sistemas AA
- Protección sobre-velocidad daño en máquina accionada plantas de papel,
rotativas, productos de acero, industria textil.
- Protección contra inversión corriente equipos DC equipo carga de baterías
- Protección mecánica envoltura a prueba de polvo, corrosión y explosiones
- Protección contra corto-circuito dispositivos de sobre-corriente proteger
conductores del circuito ramal.
VARIABLES Y FORMAS DE ENERGIA
Caracterización de sistemas físicos cantidades o variables fundamentales típicas.
Analogía con sistema eléctrico modelado de sistemas dinámicos
Tabla 1.1 – CANTIDADES FISICAS FUNAMENTALES Y PARAMETROSFORMA DE ENERGIA CANTIDADES FISICAS FUNDAMNETALES PARAMETROS
MECANICAEnergía, fuerza, masa, velocidad, aceleración, momento, presión, tiempo, energía potencial, energía cinética.
Fricción, inercia mecánica, constante
resorte.
TERMICA Calor, temperatura, entalpía, entropía, energía térmica.
Resistencia térmica (paredes) y capacitancia térmica.
ELECTRICA Energía, potencia activa, potencia reactiva, factor de potencia, voltaje, corriente.
Resistencia, inductancia y capacitancia.
HIDRAULICA Caudal, nivel, presión, energía potencial hidráulica.
Resistencia hidráulica (tuberías y válvulas), capacitancia hidráulica (taques).
Definiciones básicas
Energía mecánica trabajo relacionado con magnitudes macroscópicas
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 5
212\* MERGEFORMAT (.)
ángulo entre dirección de la fuerza y el desplazamiento
Sistema Internacional de Unidades (SI)
energía en Julio [J] fuerza en Newton [N] desplazamiento metros [m]
Calor energía térmica en calorías, BTU o Julios.
Masa ecuación de Einstein masa en kilogramos [Kg]
Equivalencias
vatio-segundo Newton-metro
Análisis dimensional
Facilitan desarrollo de modelos físicos garantiza consistencia en unidades
313\*
MERGEFORMAT (.)
Sistema SI de unidades
Aplicando la estrategia mostrada en 13, la tabla 1.2 se presenta en análisis dimensionales de algunas unidades físicas.
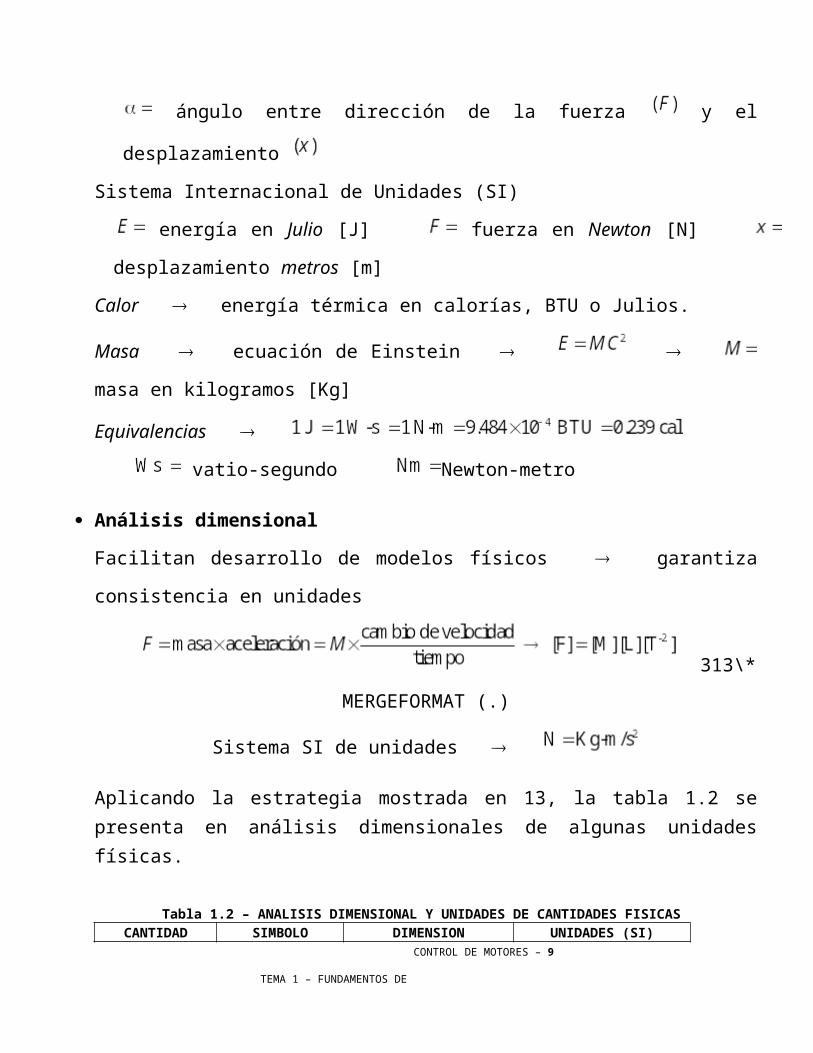
Tabla 1.2 – ANALISIS DIMENSIONAL Y UNIDADES DE CANTIDADES FISICASCANTIDAD SIMBOLO DIMENSION UNIDADES (SI)
Longitud [L] metro [m]
Masa [M] kilogramo [Kg]
Tiempo [T] segundo [s]
Velocidad [L][T-1] metro/segundo [m/s]
Aceleración [L][T-2] metro/segundo2 [m/s2]
Fuerza [M][L][T-2] Kg-m/s2 = N
Trabajo o energía [M][L2][T-2] Kg-m2/s2 = J
Potencia [M][L2][T-3] Kg-m2/s3 = W
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 6
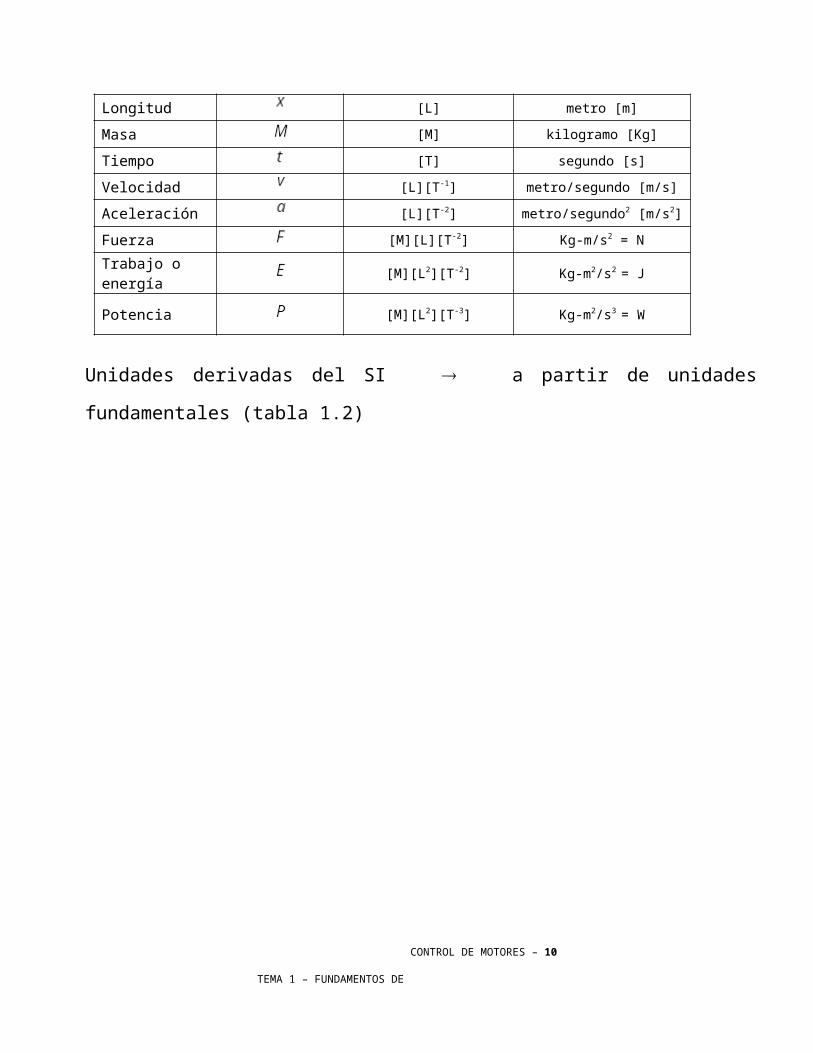
Unidades derivadas del SI a partir de unidades fundamentales (tabla 1.2)
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 7
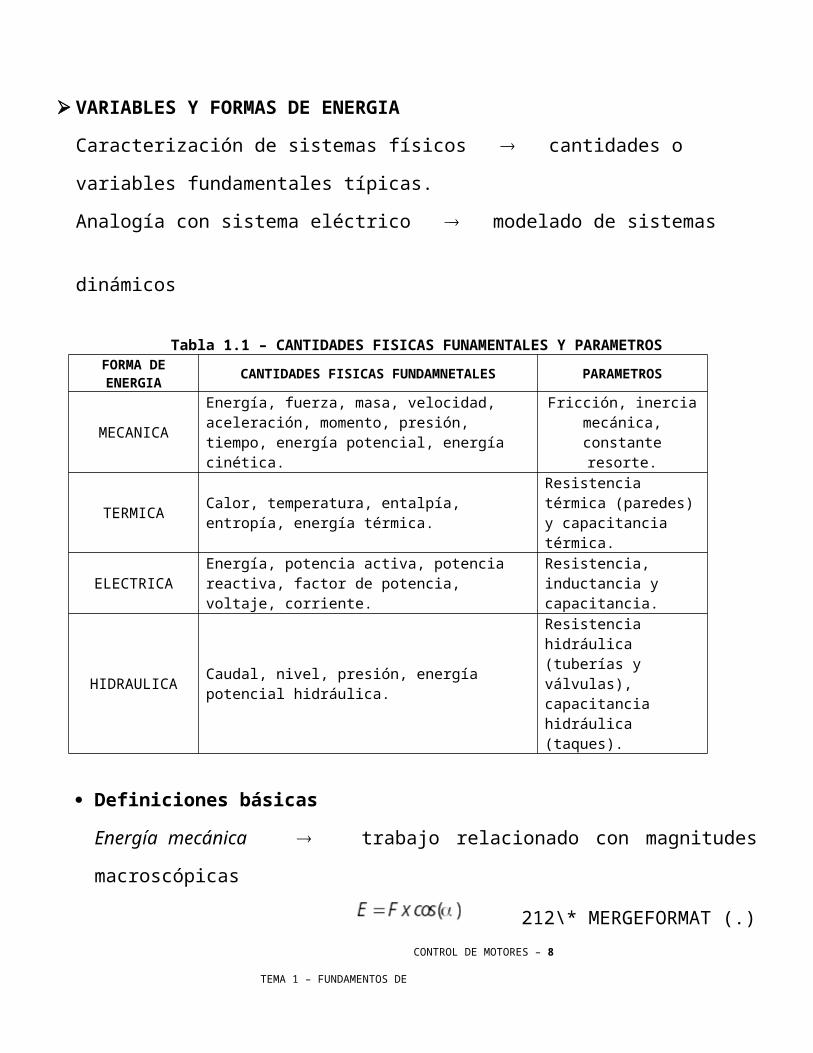
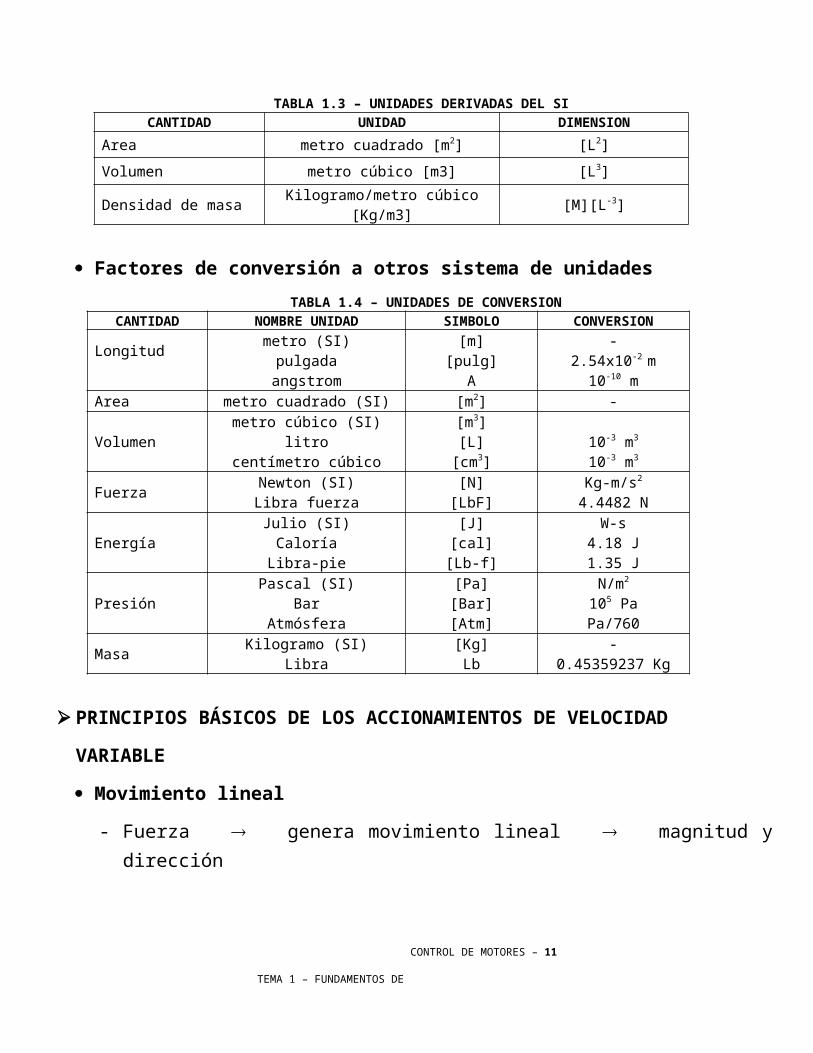
TABLA 1.3 – UNIDADES DERIVADAS DEL SICANTIDAD UNIDAD DIMENSION
Area metro cuadrado [m2] [L2]
Volumen metro cúbico [m3] [L3]
Densidad de masa Kilogramo/metro cúbico [Kg/m3] [M][L-3]
Factores de conversión a otros sistema de unidades
TABLA 1.4 – UNIDADES DE CONVERSIONCANTIDAD NOMBRE UNIDAD SIMBOLO CONVERSION
Longitud metro (SI)pulgada
angstrom
[m][pulg]
A
-2.54x10-2 m
10-10 mArea metro cuadrado (SI) [m2] -
Volumenmetro cúbico (SI)
litrocentímetro cúbico
[m3][L]
[cm3]10-3 m3
10-3 m3
Fuerza Newton (SI)Libra fuerza
[N][LbF]
Kg-m/s2
4.4482 N
EnergíaJulio (SI)Caloría
Libra-pie
[J][cal][Lb-f]
W-s4.18 J1.35 J
PresiónPascal (SI)
BarAtmósfera
[Pa][Bar][Atm]
N/m2
105 PaPa/760
Masa Kilogramo (SI)Libra
[Kg]Lb
-0.45359237 Kg
PRINCIPIOS BÁSICOS DE LOS ACCIONAMIENTOS DE VELOCIDAD
VARIABLE
Movimiento lineal
- Fuerza genera movimiento lineal magnitud y dirección
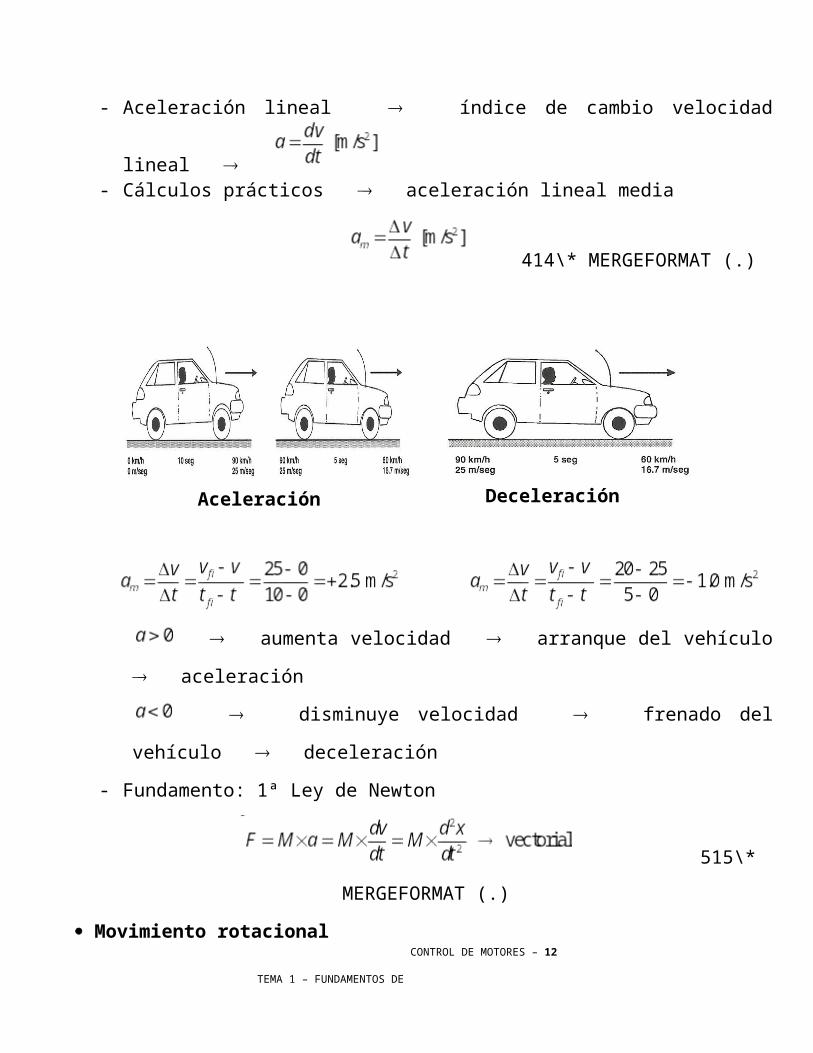
- Aceleración lineal índice de cambio velocidad lineal - Cálculos prácticos aceleración lineal media
414\* MERGEFORMAT (.)
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 8
Aceleración Deceleración
Torque 80 N-m Fuerza 40 N
Distancia 2 m
aumenta velocidad arranque del vehículo aceleración
disminuye velocidad frenado del vehículo deceleración
- Fundamento: 1ª Ley de Newton
515\*
MERGEFORMAT (.)
Movimiento rotacional
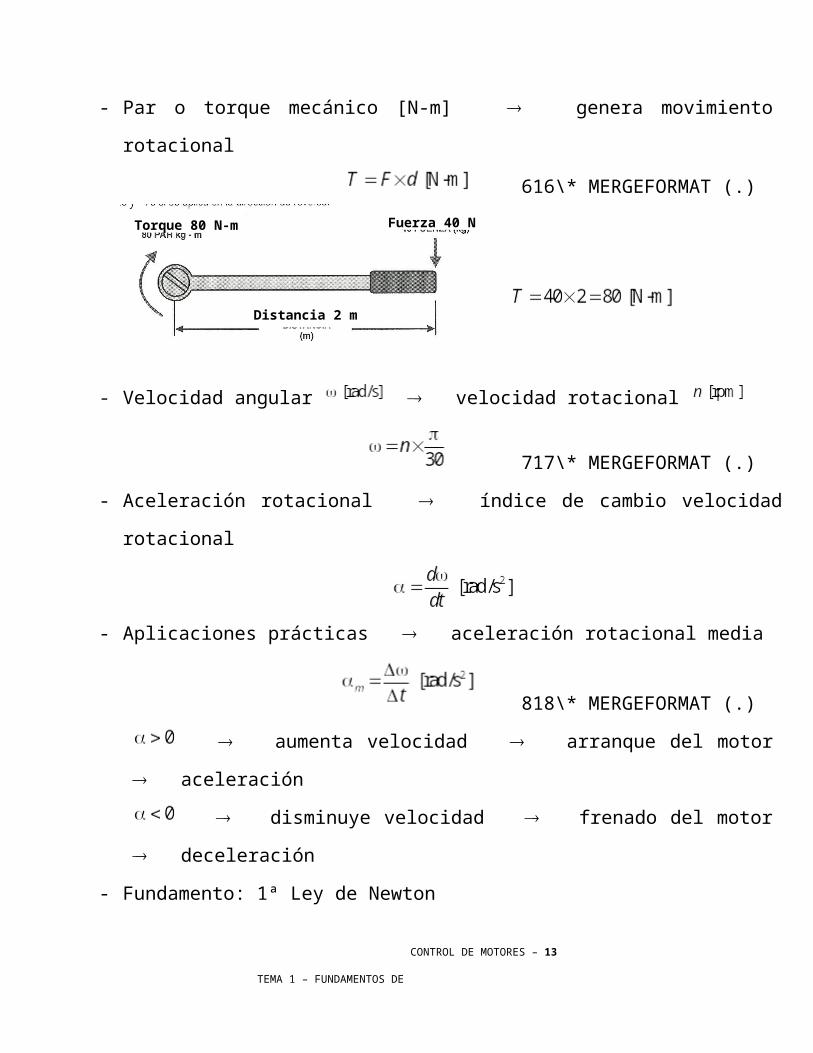
- Par o torque mecánico [N-m] genera movimiento rotacional
616\* MERGEFORMAT (.)
- Velocidad angular velocidad rotacional
717\* MERGEFORMAT (.)
- Aceleración rotacional índice de cambio velocidad rotacional
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 9
- Aplicaciones prácticas aceleración rotacional media
818\* MERGEFORMAT (.)
aumenta velocidad arranque del motor aceleración
disminuye velocidad frenado del motor deceleración
- Fundamento: 1ª Ley de Newton
919\* MERGEFORMAT
(.)
desplazamiento angular [rad] momento de inercia [Kg-m2]
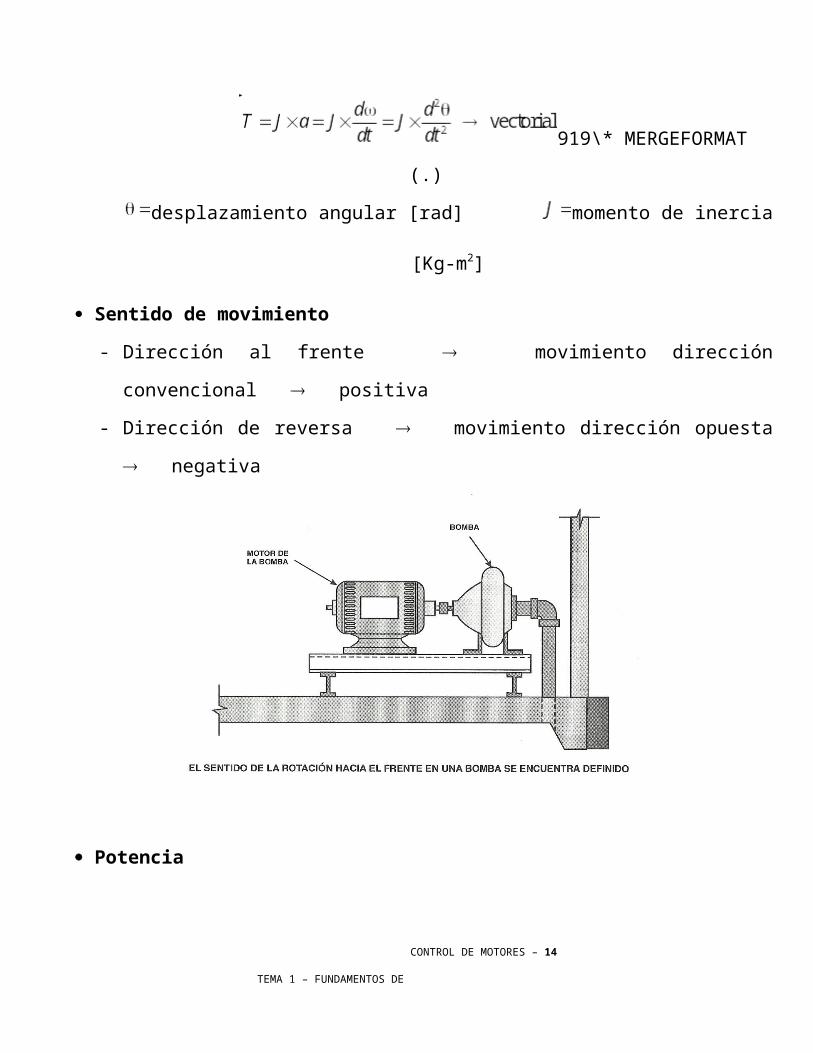
Sentido de movimiento
- Dirección al frente movimiento dirección convencional positiva
- Dirección de reversa movimiento dirección opuesta negativa
Potencia
- Indice o capacidad de producir trabajo/energía por unidad de tiempo
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 10
POTENCIA ENTRADA(Pele)
POTENCIA SALIDA(Pmec)
10110\* MERGEFORMAT (.)
SI: vatios [W] unidad práctica: kW o MW
- Máquinas rotativas radianes: sin dimensión
- Expresiones prácticas
11111\*
MERGEFORMAT (.)
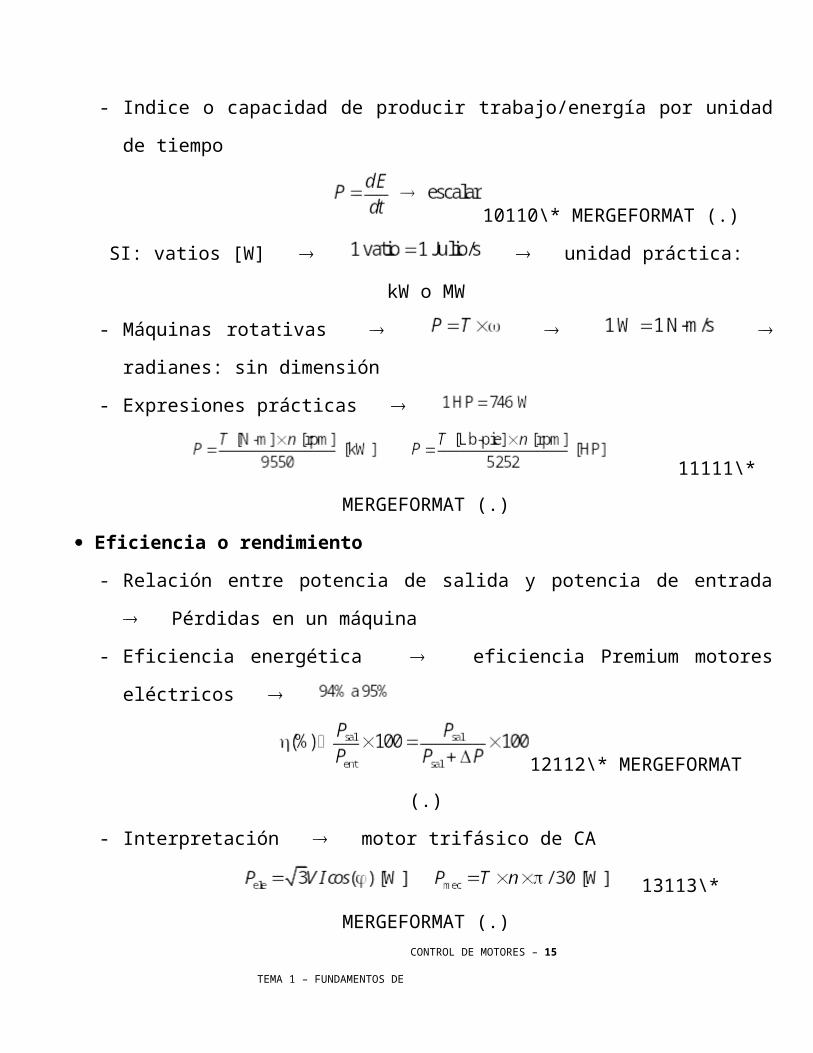
Eficiencia o rendimiento
- Relación entre potencia de salida y potencia de entrada Pérdidas en un máquina
- Eficiencia energética eficiencia Premium motores eléctricos
12112\* MERGEFORMAT (.)
- Interpretación motor trifásico de CA
13113\*
MERGEFORMAT (.)
Energía
- Trabajo acumulado en una unidad de tiempo
SI
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 11
TC
Momento de inercia
- Resistencia a modificar su velocidad angular 1ª Ley de Newton
- Aceleración media 18 torque medio
14114\* MERGEFORMAT (.)
Velocidad lineal v/s velocidad angular
- Conversión de movimiento de rotación en movimiento de traslación
- Grúas, bandas trasportadoras
15115\* MERGEFORMAT (.)
Aplicando aceleración media 18:
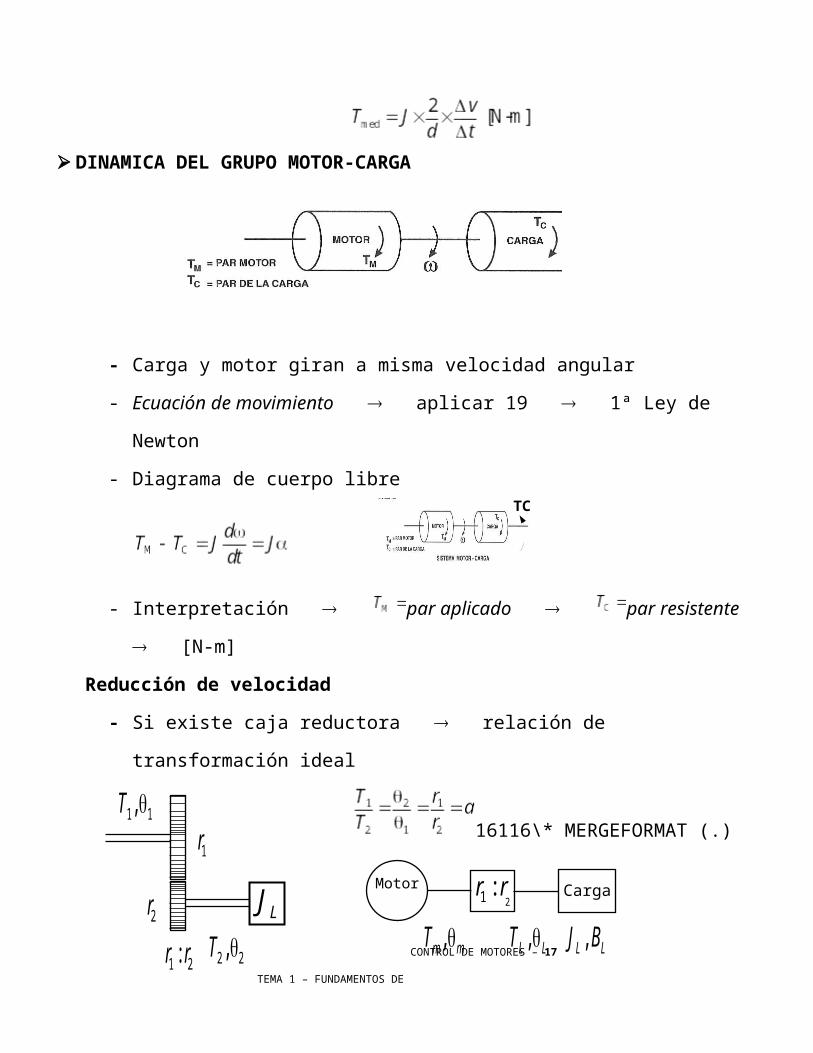
DINAMICA DEL GRUPO MOTOR-CARGA
- Carga y motor giran a misma velocidad angular
- Ecuación de movimiento aplicar 19 1ª Ley de Newton
- Diagrama de cuerpo libre
- Interpretación par aplicado par resistente [N-m]
Reducción de velocidad
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 12
1r
2r
2 2,T LJ
1 2:r r
1 1,T
21:r r
,m mT ,L LT
Motor Carga
,L LJ B
Carga
,m mT
Motor
( ) ( ),L m L mJ B
- Si existe caja reductora relación de transformación ideal
16116\* MERGEFORMAT (.)
Aplicando 1ª Ley de Newton 19 lado de carga
Aplicando 116
Sustituyendo en parámetros equivalentes, referidos al eje-motor
- Para incluir pérdidas eficiencia del dispositivo mecánico tabla 1.4
Tabla 1.4 – Par, potencia y momento de inercia referidos al eje del motor
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 13
NATURALEZA DE LA CARGA DE LA MAQUINA
- Importante en la selección del motor
- Velocidad fija suficiente especificar la potencia mecánica a velocidad nominal
- Velocidad variable evaluar comportamiento dinámico de la carga
Ejemplos típicos: Bombas, ventiladores, trituradoras, compresores, transportadoras, centrífugas.
Par de la carga
- Asociado con la velocidad determina la selección del tipo de motor
- Naturaleza de trayectoria de la carga en su movimiento
- Par constante carga pasiva sistemas de elevación
- Par variable carga dinámica bombas centrífugas
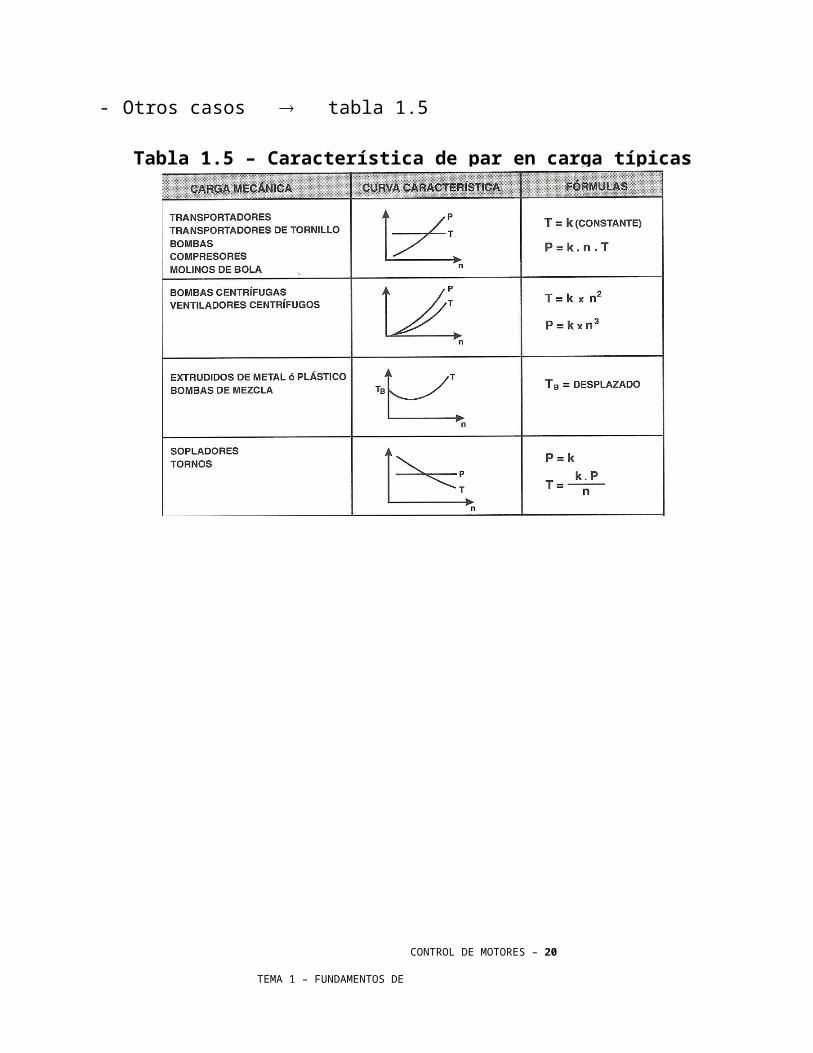
- Otros casos tabla 1.5
Tabla 1.5 – Característica de par en carga típicas industriales
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 14
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 15
Balance dinámico del par
- Posibles estados dinámicos del mecanismo:
acelera el accionamiento aumenta velocidad
desacelera el accionamiento reduce velocidad
mantiene velocidad constante o reposo
- Determina tamaño y costo del motor
- Par de carga puede variar velocidad, posición angular y tiempo de
arranque
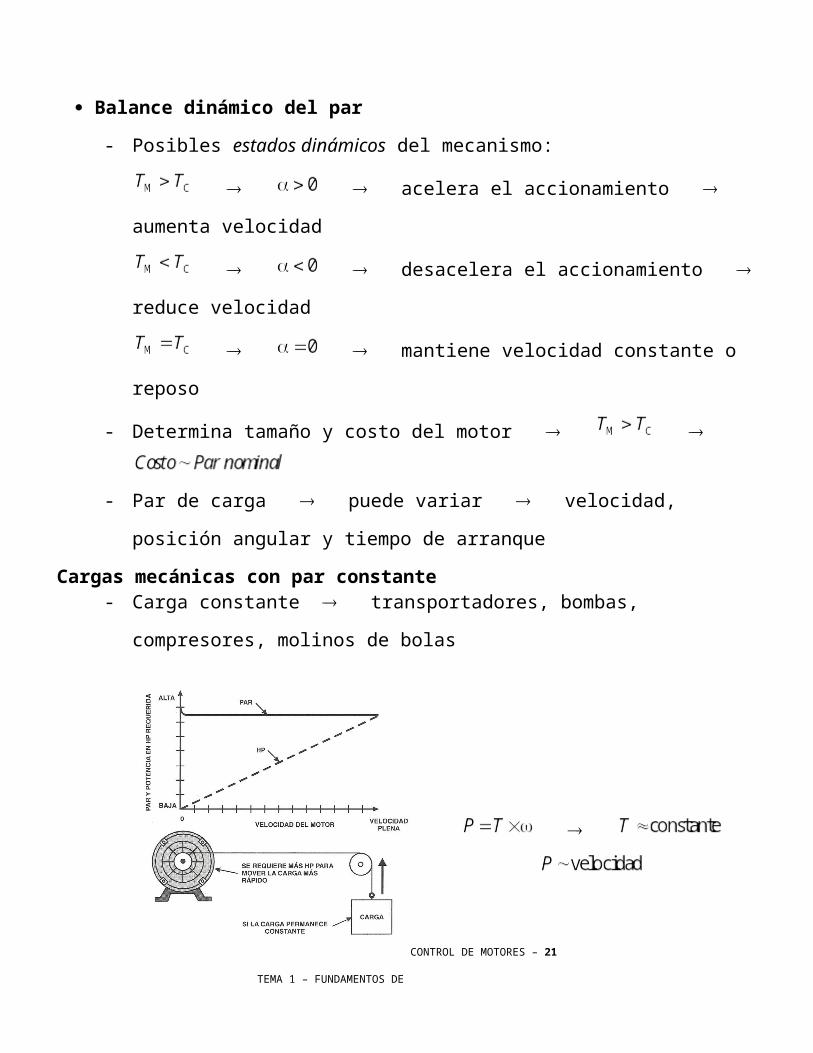
Cargas mecánicas con par constante- Carga constante transportadores, bombas, compresores, molinos de bolas
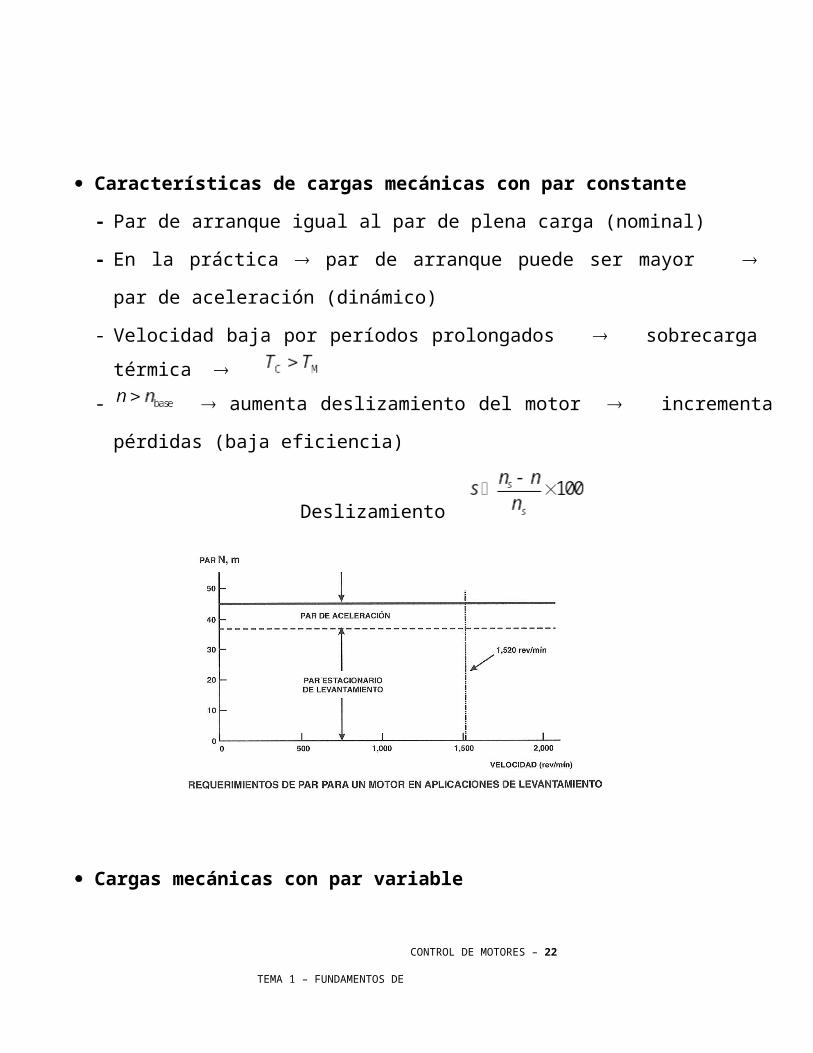
Características de cargas mecánicas con par constante
- Par de arranque igual al par de plena carga (nominal)
- En la práctica par de arranque puede ser mayor par de aceleración (dinámico)
- Velocidad baja por períodos prolongados sobrecarga térmica
- aumenta deslizamiento del motor incrementa pérdidas (baja eficiencia)
Deslizamiento
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 16
Cargas mecánicas con par variable
- Muestran un par variable sobre su rango total de velocidad
- Casos típicos ventiladores y bombas centrífugas
- Dos situaciones particulares
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 17
POTENCIA PROPORCIONAL AL CUADRADO DE LA VELOCIDAD

Características de cargas mecánicas de par variable
- Par de arranque muy bajo por debajo de la curva de mayoría de motores
- Corriente de arranque baja protección de sobrecarga no trabaja en el arranque
- No existe problema de operar a bajas velocidades
- Problema si opera por encima de velocidad base del motor
- Baja capacidad de sobre-corriente hasta 120% por 30 s
ACCIONAMIENTOS DE VELOCIDAD VARIABLE
Uso de los PWM
- Modulación por ancho de pulsos Pulse-Width-Modulation
- Alta capacidad de sobre-corriente en tiempos cortos 150% en 60 s
- Valor típico durante el arranque
- Compensación de voltaje caídas al bajar la frecuencia
- Protección adecuada del motor contra sobrecargas
- Capacidad de accionar la carga en forma continua a cualquier velocidad
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 18
POTENCIA PROPORCIONAL AL CUBO DE LA VELOCIDAD
Efectos al operar por debajo de velocidad base
- Reduce enfriamiento del motor ventilador del eje
- Incrementa temperatura de trabajo reduce vida útil del motor
- El par de la carga está dentro límites de cargabilidad para todas las velocidades
- La máxima velocidad está por debajo de la velocidad base de 50 Hz
- La velocidad no se debe incrementar por encima 50 Hz región de sobrecarga
- Par arranque bajo no existen problemas por par de ruptura break-down
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 19
CARACTERISITICA PAR ↔ VELOCIDAD DE BOMBA CENTRIFUGA CONTROLADA POR UN PWM
CARACTERISITICA PAR ↔ VELOCIDAD DE UN TRANSPORTADOR CONTROLADA POR UN PWM
LA INERCIA DE LA CARGA
- Durante la aceleración y deceleración par dinámico adicional sobre el motor
- Par extra requerido para cambiar estado cinético de la carga cambio de velocidad
- Momento de inercia y tiempo de aceleración afectan el par motor
- Inciden en tamaño y costo del motor
- Par de aceleración dinámica
cambio de velocidad durante aceleración [rpm]
tiempo necesario para el cambio de velocidad [s]
momento de inercia total del sistema [Kg-m2]
- Selección del motor durante la aceleración
- Velocidad constante
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 20
CARACTERISITICA PAR-PAR ↔ VELOCIDAD DE UN ACCIONAMIENTO DE VELOCIDAD EN C.A.
Ejemplo 1.1: Una banda transportadora debe acelerar desde cero a 1500 rpm en 10 segundos. El momento
de inercia de la carga es y el par de la carga referido al eje del motor es
constante e igual a . Se dispone de un motor de , con un
momento de inercia de . Determinar si es factible utilizar dicho motor.
Solución: El momento de inercia total del sistema es:
Durante la aceleración el par de aceleración dinámica requerido es:
De acuerdo con los datos el par de la carga es constante
Durante la aceleración el motor debe suministrar un par total al sistema de:
El par nominal del motor se puede obtener de las tablas del fabricante o a partir de sus datos nominales, como:
Como sí es posible utilizar el motor sugerido.
Inercia de la carga alimentada a través de engranajes
La inercia en el lado del motor debe calcularse como:
velocidad en el eje de la carga inercia en el eje de la carga
velocidad en el eje del motor inercia en el eje del motor
Ejemplo 1.2: Un motor de , se utiliza para mover una máquina que debe girar a
cuya inercia es , a través de un sistema de poleas y banda, cuya relación es .
Asumiendo que la carga consume una potencia constante de a y que la inercia
del motor es de , calcular el tiempo de aceleración desde el reposo hasta plena
velocidad. Suponga que el par máximo del motor es 150% de su par nominal.
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 21
Solución: El par nominal del motor es:
Par máximo desarrollado por el motor
El par absorbido por la carga es:
Convirtiéndola al eje del motor
Par de aceleración dinámica
Inercia de la carga mecánica referida el eje del motor:
Inercia total del sistema, referida al eje-motor
Tiempo de aceleración
TEMA 1 – FUNDAMENTOS DE
CONTROL DE MOTORES – 22