Embed Size (px)
Citation preview

Transduser dan SensorSensor Jarak
Kurniawan Teguh Martono
Sistem Komputer UNDIP

Pendahuluan Mari lihat video ini

Sensor Jarak Sensor jarak (proximity sensor) merupakan
komponen untuk mendeteksi keberadaan suatu objek beserta perkiraan jaraknya.
Sensor jarak adalah perkakas yang tidak bersentuhan dengan objek yang berfungsi untuk menyediakan perin gatan dini mengenai keberadaan objek di depannya.

Jenis Sensor Jarak Perkuliahan kali ini akan membahasmengenai
dua buah sensor jarak, yaitu Sensor jarak infra merah dan Sensor jarak ultrasonik

Sensor Jarak Infra Merah
Sharp GP2D12 Sensor ini termasuk
pada sensor jarak kategori optik

Cara kerja Pada dasarnya sensor ini sama seperti sensor
Infra Red (IR) konvensional, GP2D12 memiliki bagian transmitter/emitter dan receiver (detektor).
Bagian transmitter akan memancarkan sinyal IR yang telah dimodulasi, sedangkan pantulan dari IR (apabila mengenai sebuah objek) akan ditangkap oleh bagian detektor yang terdiri dari lensa pemfokus dan sebuah position-sensitive detector.

Karakteristik Sensor Sharp GP2D12 dapat mengukur jarak
halangan pada daerah 10 – 80 cm dengan memanfaatkan pemancaran dan penerimaan gelombang infra merah sebagai media untuk mengestimasi jarak.
Penggunaan sperktrum infra merah menyebabkan sensor ini tidak mudah terganggu dengan keberadaan cahaya tampak dari lingkun gan karena memiliki daerah spektrum yang berbeda
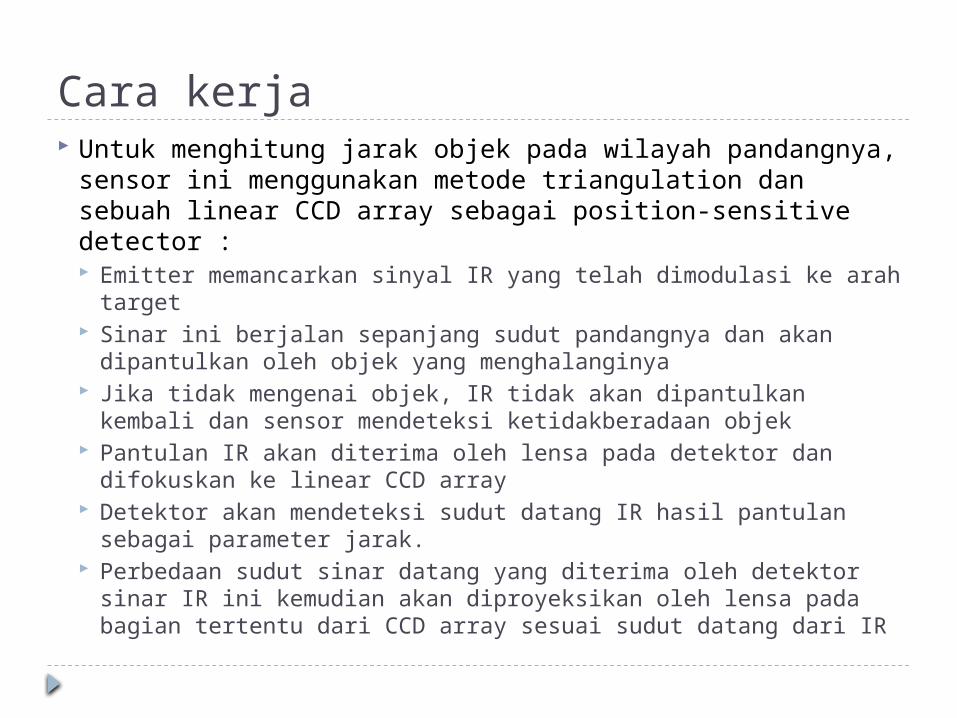
Cara kerja Untuk menghitung jarak objek pada wilayah pandangnya,
sensor ini menggunakan metode triangulation dan sebuah linear CCD array sebagai position-sensitive detector : Emitter memancarkan sinyal IR yang telah dimodulasi ke arah
target Sinar ini berjalan sepanjang sudut pandangnya dan akan
dipantulkan oleh objek yang menghalanginya Jika tidak mengenai objek, IR tidak akan dipantulkan kembali
dan sensor mendeteksi ketidakberadaan objek Pantulan IR akan diterima oleh lensa pada detektor dan
difokuskan ke linear CCD array Detektor akan mendeteksi sudut datang IR hasil pantulan
sebagai parameter jarak. Perbedaan sudut sinar datang yang diterima oleh detektor sinar
IR ini kemudian akan diproyeksikan oleh lensa pada bagian tertentu dari CCD array sesuai sudut datang dari IR

Ilustrasi

Sensor Jarak Ultrasonik R93-SRF08 Dalam
pendeteksian jaraknya sensor ini menggunakan gelombang ultrasonik yang dihasilkan oleh sensor ini.

Gelombang Ultrasonik Gelombang ultrasonik adalah gelombang
dengan besar frekuensi diatas frekuensi gelombang suara yaitu lebih dari 20 KHz
Sinyal yang dipancarkan tersebut kemudian akan merambat sebagai sinyal / gelombang bunyi dengan kecepatan bunyi yang berkisar 340 m/s

Cara kerja Sensor ini menggunakan prinsip time of flight,
artinya sensor tersebut akan mengukur waktu semenjak suara dipancarkan hingga terdengar suara pantulnya.
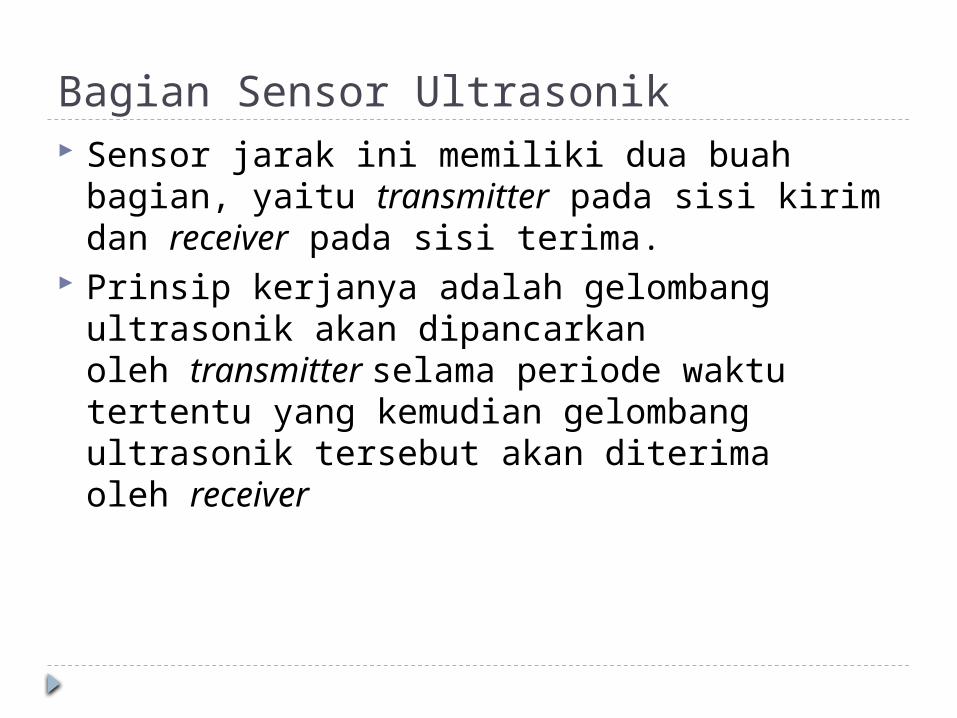
Bagian Sensor Ultrasonik Sensor jarak ini memiliki dua buah bagian,
yaitu transmitter pada sisi kirim dan receiver pada sisi terima.
Prinsip kerjanya adalah gelombang ultrasonik akan dipancarkan oleh transmitter selama periode waktu tertentu yang kemudian gelombang ultrasonik tersebut akan diterima oleh receiver

Bagaimana menghitung jaraknya? Perhitungan jaraknya adalah dengan mengalikan
kecepatan gelombang ultrasonik dengan waktu tempuh dan kemudian dibagi 2 akibat adanya waktu gelombang ultrasonik dipantulkan ke receiver yang besarnya sama dengan waktu gelombang ultrasonik menyentuh benda.
Jarak maksimum yang dapat dideteksi oleh SRF-08 = 11 Meter
Jarak dihitung berdasarkan rumusS = (340 x t )/ 2
Dimana :340 m/s = kecepatan bunyi yang merambat sebagai sinyal / gelombang bunyi di udara

Implementasi sensor ultrasonik

Tugas Buatlah resume mengenai PING ))) sensor
jarak ultrasonik Buat dalam bentuk PPT :
Landasan teori Implementasi Model matematiknya





























